Difficulties in computing the fundamental distortion mode in...
36
Difficulties in computing the fundamental distortion mode in Coriolis mass flow meters CLAPDE 2008 Simon Shaw people.brunel.ac.uk/˜icsrsss [email protected] BICOM and Mathematical Sciences, Brunel University, England Simon Shaw, CLAPDE (Durham) 2008 – p.1/34
Transcript of Difficulties in computing the fundamental distortion mode in...
Difficulties in computing the fundamentaldistortion mode in Coriolis mass flow meters
CLAPDE 2008Simon Shaw
people.brunel.ac.uk/˜icsrsss
BICOM and Mathematical Sciences, Brunel University, England
Simon Shaw, CLAPDE (Durham) 2008 – p.1/34
Focus
The Coriolis effect
Coriolis mass flow meters
Collaboration and background
Eigenvalue problem & results
Simon Shaw, CLAPDE (Durham) 2008 – p.2/34

Coriolis
Gaspard-Gustave de Coriolis (Gustave
Coriolis, May 21, 1792 — September 19,
1843) published the paper that described
the effect that now bears his name in
1835: Sur les équations du mouvement
relatif des systèmes de corps (On the
equations of relative motion of a system
of bodies).
Source:en.wikipedia.org/wiki/Gaspard-Gustave_Coriolis
Simon Shaw, CLAPDE (Durham) 2008 – p.3/34
The Coriolis effect
Imagine rolling a ball radially outward at constant velocityVs m/s from the centre of a roundabout/carousel that isrotating at ω rad/sec.
The ball will experience:
a radial centripetal acceleration
a tangential Coriolis acceleration
Consider the change in velocity during dt. . .
Simon Shaw, CLAPDE (Durham) 2008 – p.4/34
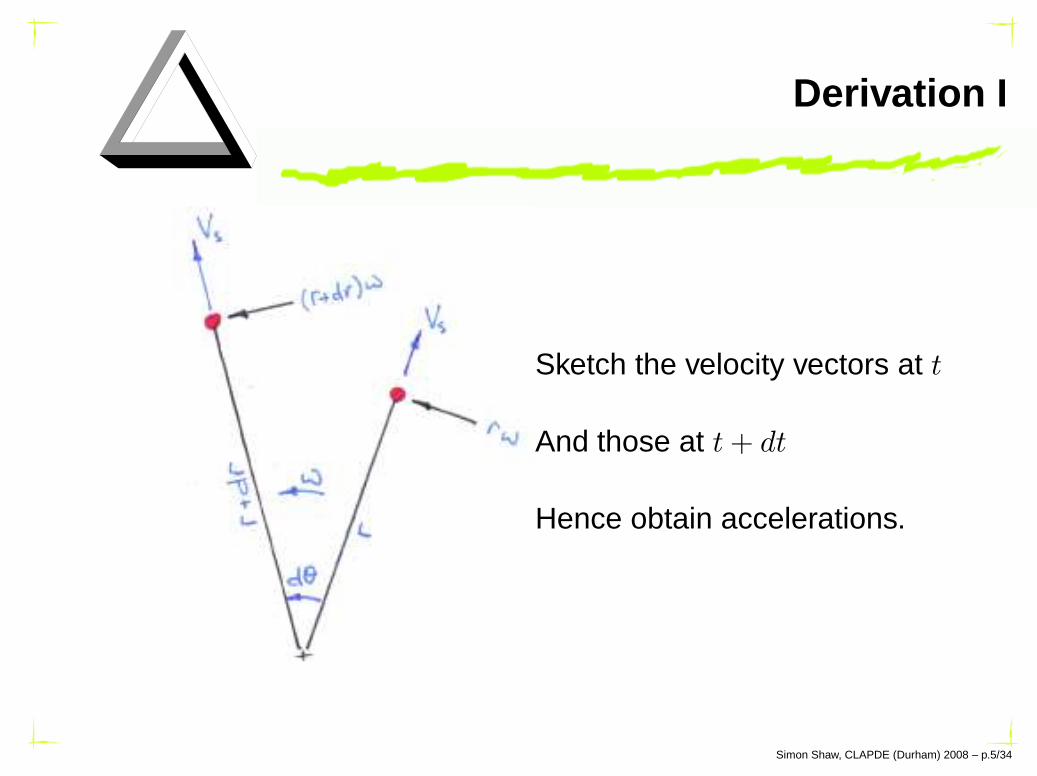
Derivation I
Sketch the velocity vectors at t
And those at t + dt
Hence obtain accelerations.
Simon Shaw, CLAPDE (Durham) 2008 – p.5/34

Derivation II
Change in tangential velocity
Vs dθ + ω dr
Change in radial velocity
rω dθ
Divide by dt to get acceleration:
tangential: 2ωVs Coriolis
radial: rω2 Centripetal
Simon Shaw, CLAPDE (Durham) 2008 – p.6/34

Pipe meter physics I
Metal pipe carries a plug flow of fluid at velocity V .
Pipe also vibrated by electromagnetic sine
Bending theory applies
Simon Shaw, CLAPDE (Durham) 2008 – p.7/34

Pipe meter physics II
Right end: fluid particle = ball on roundabout.
Coriolis acceleration implies force implies deformation.
Left end: Coriolis force is in opposite direction.Simon Shaw, CLAPDE (Durham) 2008 – p.8/34
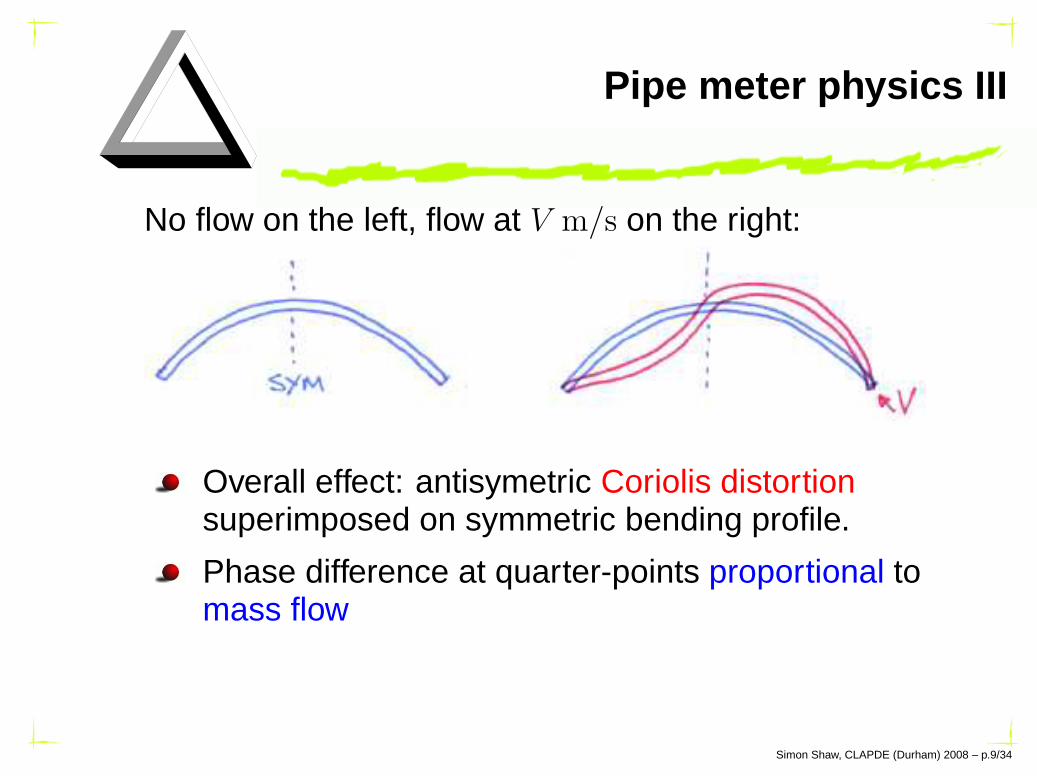
Pipe meter physics III
No flow on the left, flow at V m/s on the right:
Overall effect: antisymetric Coriolis distortionsuperimposed on symmetric bending profile.
Phase difference at quarter-points proportional tomass flow
Simon Shaw, CLAPDE (Durham) 2008 – p.9/34
So what?
Why does this matter?
Coriolis distortion is an inertial effect and isproportional to the mass (not volume) flow rate.
Mass flow is measured directly not by the indirectconversion of volume flow (e.g. bubbles).
Important for accuracy:Custodial transfersmedical drug dosing
Meters range from over 1 metre diameter tomicro-machined (fits on a thumb).
Simon Shaw, CLAPDE (Durham) 2008 – p.10/34

Example from wikipedia
An illustrative example:
No flow
With flow
Courtesy wikipedia.
Simon Shaw, CLAPDE (Durham) 2008 – p.11/34
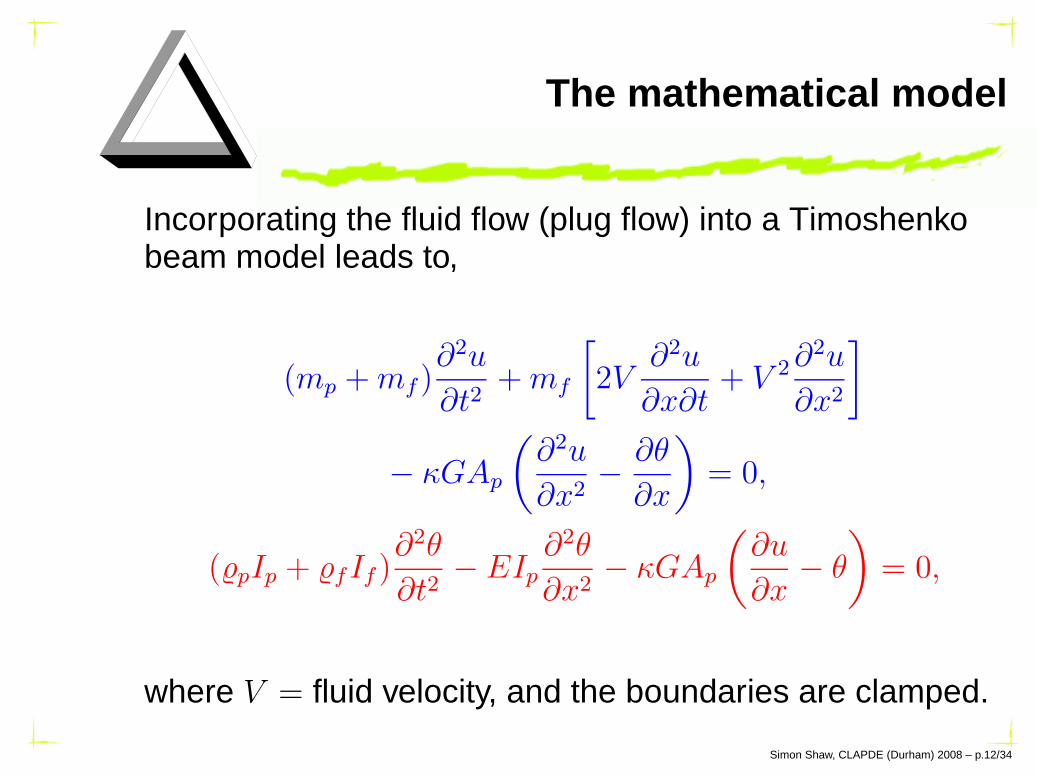
The mathematical model
Incorporating the fluid flow (plug flow) into a Timoshenkobeam model leads to,
(mp + mf )∂2u
∂t2+ mf
[
2V∂2u
∂x∂t+ V 2
∂2u
∂x2
]
− κGAp
(
∂2u
∂x2−
∂θ
∂x
)
= 0,
(̺pIp + ̺fIf )∂2θ
∂t2− EIp
∂2θ
∂x2− κGAp
(
∂u
∂x− θ
)
= 0,
where V = fluid velocity, and the boundaries are clamped.
Simon Shaw, CLAPDE (Durham) 2008 – p.12/34
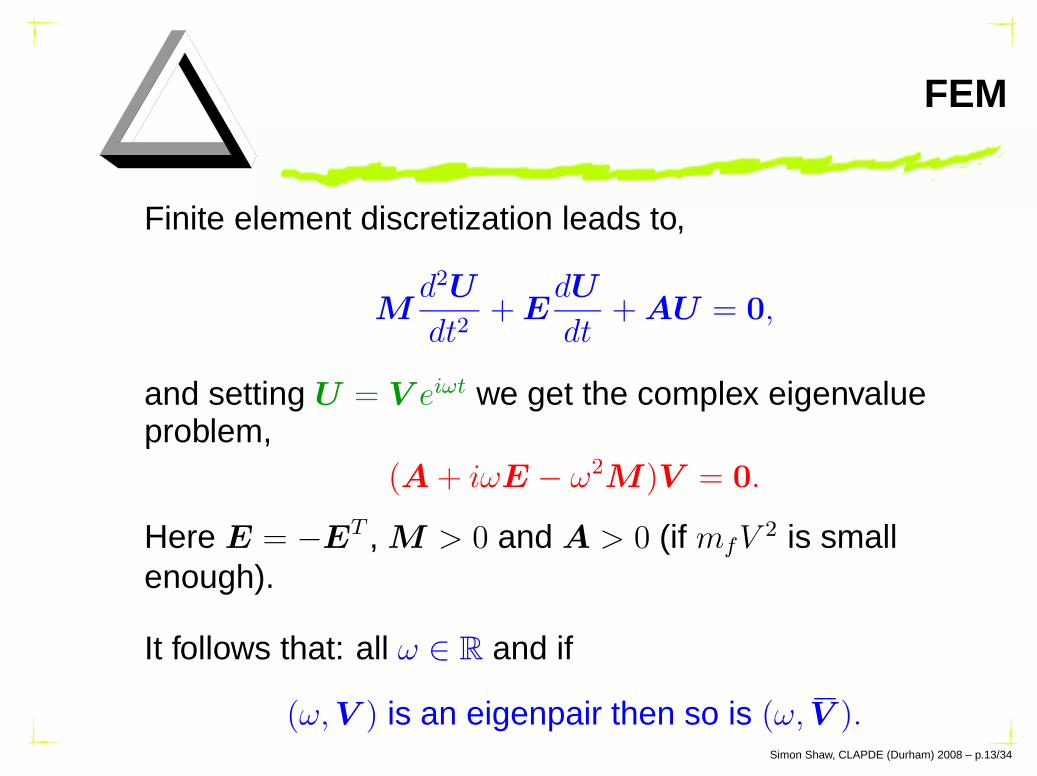
FEM
Finite element discretization leads to,
Md2U
dt2+ E
dU
dt+ AU = 0,
and setting U = V eiωt we get the complex eigenvalueproblem,
(A + iωE − ω2M)V = 0.
Here E = −ET , M > 0 and A > 0 (if mfV
2 is smallenough).
It follows that: all ω ∈ R and if
(ω,V ) is an eigenpair then so is (ω,V ).Simon Shaw, CLAPDE (Durham) 2008 – p.13/34
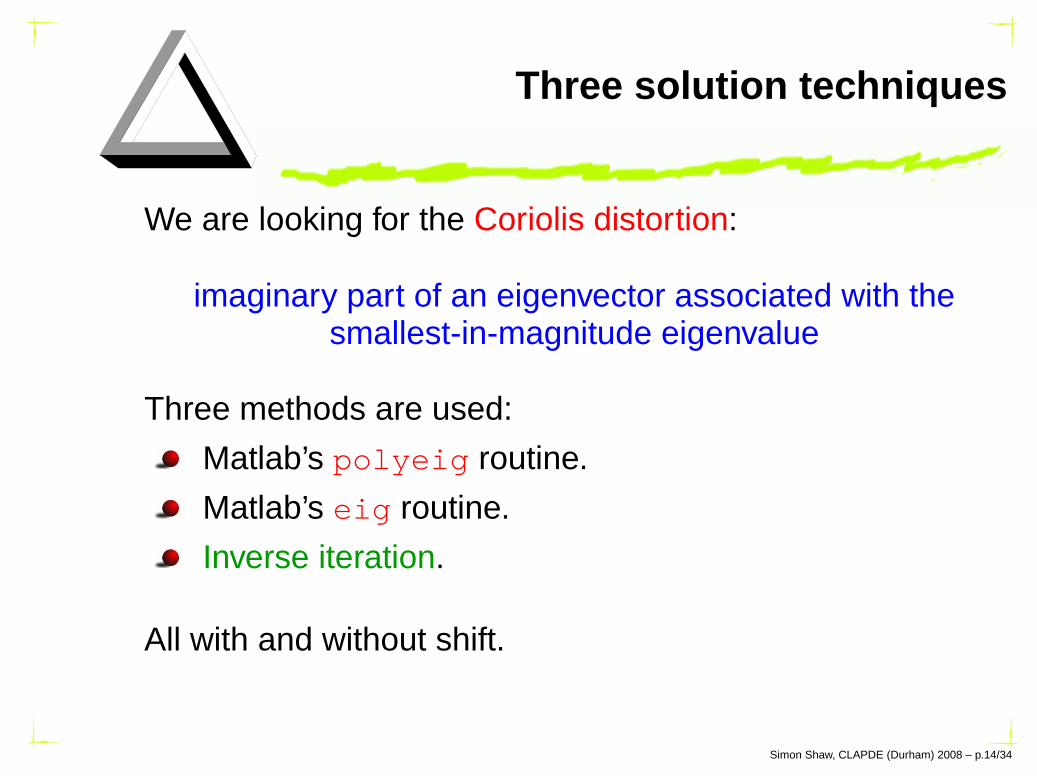
Three solution techniques
We are looking for the Coriolis distortion:
imaginary part of an eigenvector associated with thesmallest-in-magnitude eigenvalue
Three methods are used:
Matlab’s polyeig routine.
Matlab’s eig routine.
Inverse iteration.
All with and without shift.
Simon Shaw, CLAPDE (Durham) 2008 – p.14/34

polyeig for (A + iωE − ω2M)V = 0
The MATLAB fragment
[X, e] = polyeig(A, i * E, -M);
solves the quadratic eigenvalue problem in terms of acolumn of eigenvalues, e, and a matrix of eigenvectors, X.(Recall that A and M are invertible.)
Simon Shaw, CLAPDE (Durham) 2008 – p.15/34

eig for (A + iωE − ω2M)V = 0
Set W = ωV so that −ω2MV = −ωMW . Then:(
0 I
M−1
A iM−1E
)(
V
W
)
= ω
(
V
W
)
.
Hence: BX = XL, with L = diagonal of eigenvalues andX = eigenvectors. Solve in MATLAB via the fragment,
B = [ zeros(N,N) eye(N) ;M\A i * M\E ];
[X L] = eig(B);
(where A, E and M are N × N ).
Simon Shaw, CLAPDE (Durham) 2008 – p.16/34

Inverse iteration
Given D > 0 and x0 the iteration:
zn+1 = D−1
xn for n = 0, 1, 2, . . .
xn+1 = zn+1‖zn+1‖−1∞
converges to the eigenvector of the eigenvalue of leastmodulus of D (if this is well-defined).
For our system this is,
W n+1 = V n
V n+1 = A−1 (MW n − iEW n+1)
and we take (1 + 10−5i, 1 + 10−5i, . . .) as the initial guess.Simon Shaw, CLAPDE (Durham) 2008 – p.17/34

Summary
These methods were used with and without shift.
The physical constants in the PDEs are ‘real life’ andcorrespond to a real straight-tube meter.
Most meters are far more complicated in terms of designand geometry.
Before the numerics here is the background.
Simon Shaw, CLAPDE (Durham) 2008 – p.18/34
Collaboration and background
Robert Cheesewright (Engineering, Brunel) was gettingincorrect eigenvectors from ANSYS.
He asked for my help and advice in terms of FEM and‘locking’.
My independent C++ and matlab computations still gaveincorrect results. . .
The Timoshenko beam results are shown
The Euler-Bernoulli results are essentially the same
The results for a straight tube meter are. . .
Simon Shaw, CLAPDE (Durham) 2008 – p.19/34
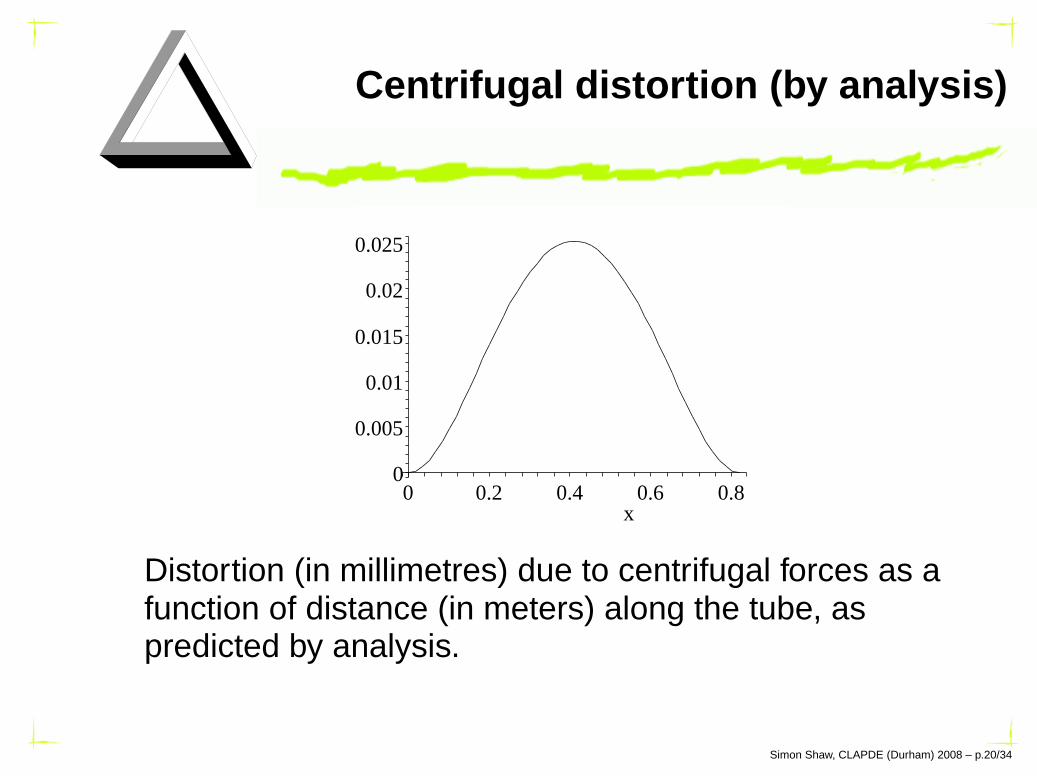
Centrifugal distortion (by analysis)
x
0.02
0.015
0.01
0.005
00.80.60.40.20
0.025
Distortion (in millimetres) due to centrifugal forces as afunction of distance (in meters) along the tube, aspredicted by analysis.
Simon Shaw, CLAPDE (Durham) 2008 – p.20/34

Coriolis distortion (by analysis)
0.04
x
0.02
00.8
-0.02
-0.04
0.60.40.20
Distortion (in millimetres) due to Coriolis forces as afunction of distance (in meters) along the tube, aspredicted by analysis.
Simon Shaw, CLAPDE (Durham) 2008 – p.21/34
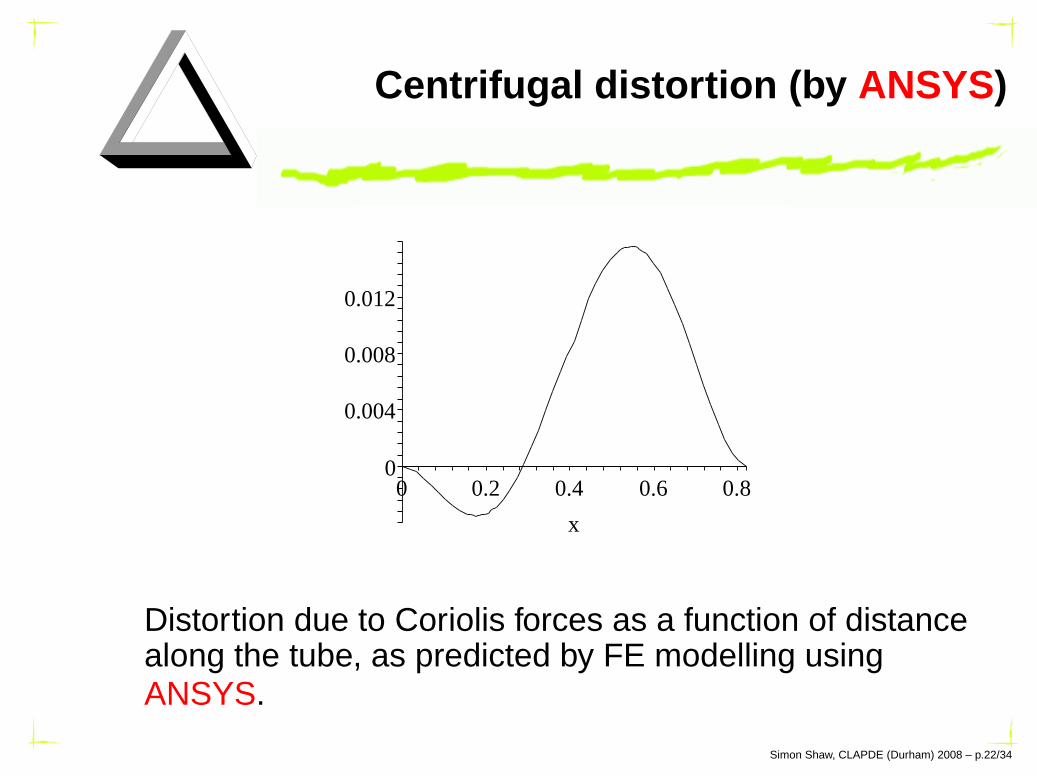
Centrifugal distortion (by ANSYS)
0.012
0.008
x
0.004
00.80.60.40.20
Distortion due to Coriolis forces as a function of distancealong the tube, as predicted by FE modelling usingANSYS.
Simon Shaw, CLAPDE (Durham) 2008 – p.22/34
My efforts. . .
The coriolis distortion is wrong and not physical.
My efforts:
C++ code to generate FE matrices
Data read by matlab for eigen-computations
The results were. . .
Simon Shaw, CLAPDE (Durham) 2008 – p.23/34

Eigenvalues (no shift)
|ω|min by technique. . .Ne 1 2 316 940.1753 940.1753 ≈ 1 ↔ 13000
32 938.9266 938.9266 ≈ 1 ↔ 13000
64 938.8359 938.8359 ≈ 1 ↔ 13000
128 938.8298 938.8300 ≈ 1 ↔ 13000
256 938.8296 938.8296 ≈ 1 ↔ 13000
Computed |ω|min for the Timoshenko beam (quadraticelements) with no shift, p = 0.
Simon Shaw, CLAPDE (Durham) 2008 – p.24/34

Eigenvalues (with shift)
|ω|min by technique. . .Ne 1 2 316 940.1753 940.1753 940.1753
32 938.9266 938.9266 938.9266
64 938.8359 938.8359 938.8359
128 938.8300 938.8300 938.8300
256 938.8296 938.8296 938.8296
Computed |ω|min for the Timoshenko beam (quadraticelements) with shift p = 900.
Simon Shaw, CLAPDE (Durham) 2008 – p.25/34
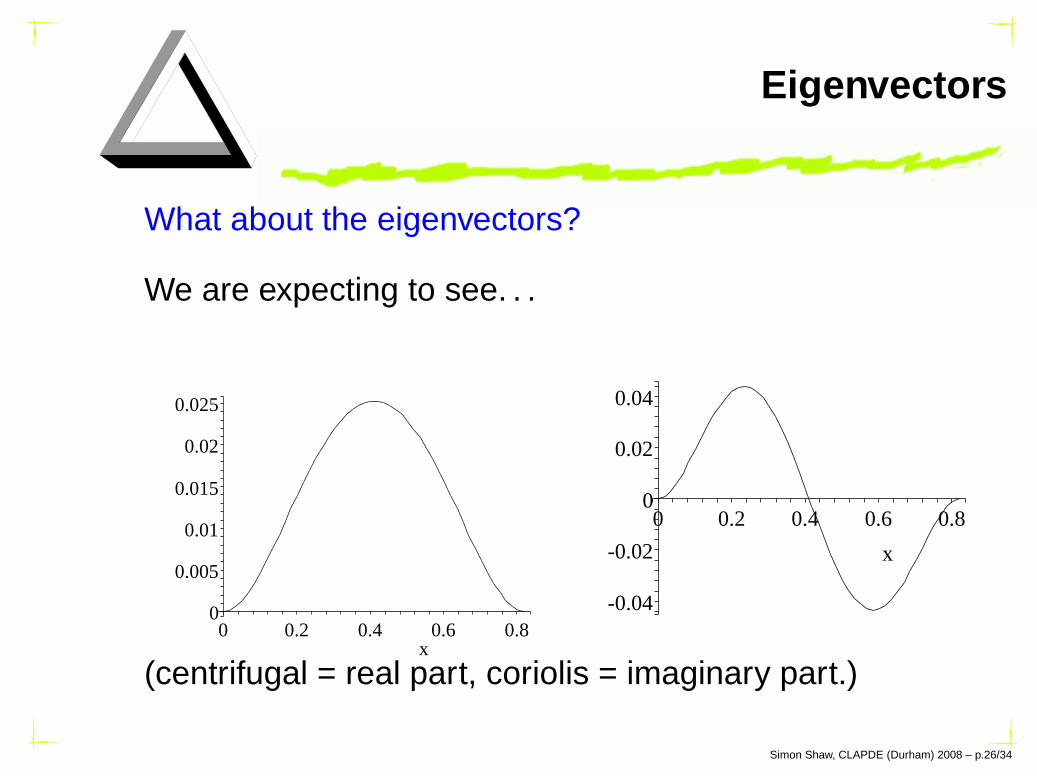
Eigenvectors
What about the eigenvectors?
We are expecting to see. . .
x
0.02
0.015
0.01
0.005
00.80.60.40.20
0.025 0.04
x
0.02
00.8
-0.02
-0.04
0.60.40.20
(centrifugal = real part, coriolis = imaginary part.)
Simon Shaw, CLAPDE (Durham) 2008 – p.26/34

polyeig without shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from Matlab’s eig routine. No shift (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.27/34
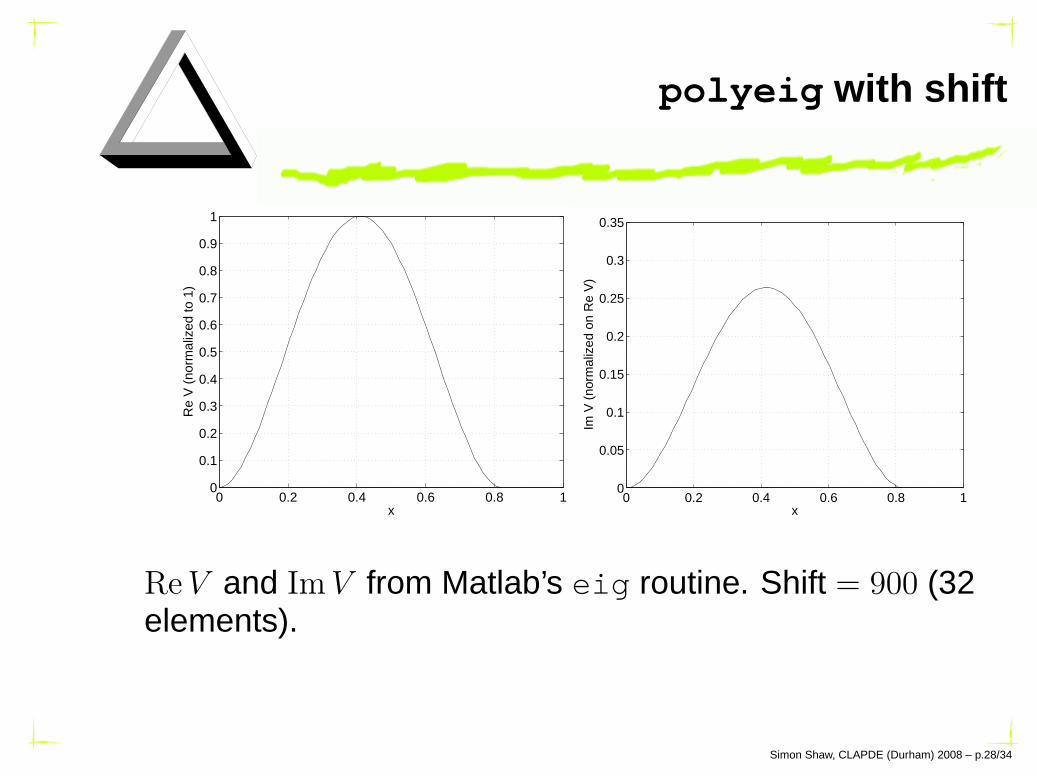
polyeig with shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 10
0.05
0.1
0.15
0.2
0.25
0.3
0.35
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from Matlab’s eig routine. Shift = 900 (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.28/34
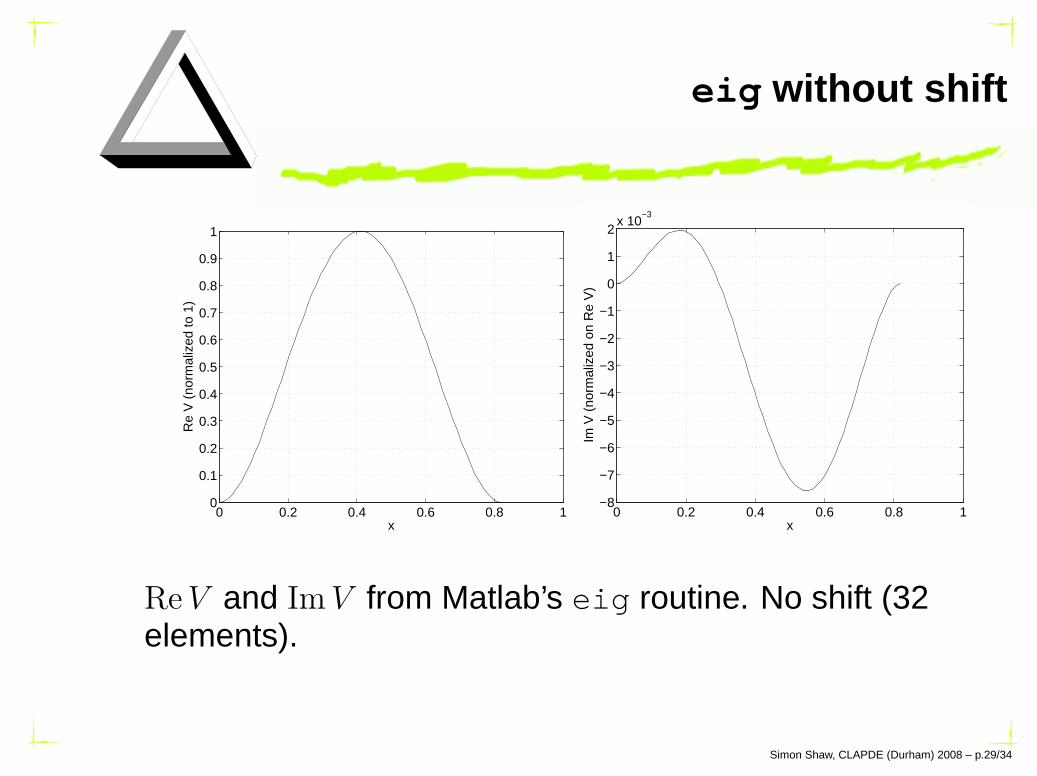
eig without shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 1−8
−7
−6
−5
−4
−3
−2
−1
0
1
2x 10
−3
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from Matlab’s eig routine. No shift (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.29/34

eig with shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 1−8
−7
−6
−5
−4
−3
−2
−1
0
1
2x 10
−3
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from Matlab’s eig routine. Shift = 900 (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.30/34

Inverse iteration without shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 1−2
0
2
4
6
8
10
12
14x 10
−6
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from inverse iteration. No shift (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.31/34

Inverse iteration with shift
0 0.2 0.4 0.6 0.8 10
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
x
Re
V (
norm
aliz
ed to
1)
0 0.2 0.4 0.6 0.8 1−5
−4
−3
−2
−1
0
1
2
3
4
5x 10
−3
x
Im V
(no
rmal
ized
on
Re
V)
ReV and Im V from inverse iteration. Shift = 900 (32elements).
Simon Shaw, CLAPDE (Durham) 2008 – p.32/34

Conclusion
Shifted inverse iteration is most robust (given a goodinitial guess).
ANSYS and matlab seem to struggle.
Problem is due to rounding error (a hunch!)ω2r and 2ωV are different orders of magnitude.
A challenge for eigen-solvers?
. . . or is there an ‘easy’ remedy?
Simon Shaw, CLAPDE (Durham) 2008 – p.33/34

FIAM
I’ll leave you with the fundamental inequality of appliedmathematics:
‖T − P‖T ≪ ‖T − P‖P
Simon Shaw, CLAPDE (Durham) 2008 – p.34/34

FIAM
I’ll leave you with the fundamental inequality of appliedmathematics:
‖T − P‖T ≪ ‖T − P‖P
The difference between theory and practice in theoryis less than
the difference between theory and practice in practice.Anon, circa 20th Century
Simon Shaw, CLAPDE (Durham) 2008 – p.34/34

FIAM
I’ll leave you with the fundamental inequality of appliedmathematics:
‖T − P‖T ≪ ‖T − P‖P
The difference between theory and practice in theoryis less than
the difference between theory and practice in practice.Anon, circa 20th Century
The End. . .
Simon Shaw, CLAPDE (Durham) 2008 – p.34/34