Differentiation Rules -...
35
Differentiation Rules Differentiation Rules
Transcript of Differentiation Rules -...

Differentiation RulesDifferentiation Rules

The Definition of the Derivative
( )
( ) ( ) ( )0 0
0 00 0
The of a function f at a number , f , is
f f f lim
provided that the lim
derivativ
it exists and is fini .
e
te
h
x x
x h xx
h→
′
+ −′ =
Recall equivalent definitions
1
provided that the limit exists and is fini .te
( )( ) ( ) ( ) ( ) ( ) ( )
0
0
0
0 0 0 0 0
The of a function f at a number , is a number
, if there is a function with the properties
lim 0 and
derivative
f f .x x
x
a x x
x x x x a x x x x x x
εε ε
→
−
− = − = − + − −
2

Basic Differentiation Rules
( ) ( ) ( )D fg D f g fD g= +3 The Product Rule
( )D 1x =1 The derivative of the function f(x)=x is 1.
2 ( ) ( ) ( )D f g D f D g+ = +
( ) ( ) ( )
( )( )( ) ( ) ( )( ) ( )( )( )( ) ( )( ) ( )
D f g D f g D g
f g f g g
x x x
d xx x
dx
=
′ ′⇔ =
4 The Chain Rule
These are the basic differentiation rules which imply all other differentiation rules for rational algebraic expressions.

Derived Differentiation Rules
( ) ( )-1 1
D fD f
=6
( ) ( )2
gD f fD gfD
g g
− =
5 The Quotient Rule. Follows from the
Product Rule.
Inverse Function Rule. Follows from the Chain Rule.( ) ( )D f Chain Rule.

Special Function Rules
1, r
rdxrx r
dx−= ∈ �
8
9
7
( ) ( )cossin
d xx= −
12 ( )2
arctan 11
d x
dx x=
+
13e
ex
xddx
=
( )ln 1d x
dx x=
( ) ( )sincos
d xx
dx=
9 ( ) ( )cossin
d xx
dx= −
10 ( )( )2
tan 1cos
d x
dx x=
11 ( )2
arcsin 1
1
d x
dx x=
−
14 ( )lnx
xdaa a
dx=
15
16 ( ) 1log
lna
dx
dx x a=


Curve sketching and analysis
y = f(x) must be continuous at each:� critical point: = 0 or undefined. And don’t forget endpoints
� local minimum: goes (–,0,+) or (–,und,+) or > 0
dy
dx
dy
dx
2
2
d y
dx
� local maximum: goes (+,0,–) or (+,und,–) or < 0
� point of inflection: concavity changes
goes from (+,0,–), (–,0,+),(+,und,–), or (–,und,+)
dx dx2
2
d y
dx
2
2
d y
dx
dy
dx









Taylor Series
Brook Taylor1685 - 1731
Brook Taylor was an accomplished musician and painter. He did research in a variety of areas, but is most famous for his development of ideas regarding infinite series.

Maclaurin Series:
(generated by f at )0x =
( ) ( ) ( ) ( ) ( )2 30 00 0
2! 3!
f fP x f f x x x
′′ ′′′′= + + + + ⋅⋅⋅
If we want to center the series (and it’s graph) at some point other than zero, we get the Taylor Series:point other than zero, we get the Taylor Series:
Taylor Series:
(generated by f at )x a=
( ) ( ) ( )( ) ( ) ( ) ( ) ( )2 3
2! 3!
f a f aP x f a f a x a x a x a
′′ ′′′′= + − + − + − + ⋅⋅⋅
→

example: cosy x=
( ) cosf x x= ( )0 1f =
( ) sinf x x′ = − ( )0 0f ′ =
( ) cosf x x′′ = − ( )0 1f ′′ = −
( ) sinf x x′′′ = ( )0 0f ′′′ =
( ) ( )4 cosf x x= ( ) ( )4 0 1f =
( )2 3 4 5 61 0 1 0 1
1 0 2! 3! 4! 5! 6!
x x x x xP x x= + − + + + − + ⋅⋅⋅
( )2 4 6 8 10
1 2! 4! 6! 8! 10!
x x x x xP x = − + − + − ⋅⋅⋅
→

example: ( )cos 2y x=
Rather than start from scratch, we can use the function that we already know:
( ) ( ) ( ) ( ) ( ) ( )2 4 6 8 102 2 2 2 2
1 2! 4! 6! 8! 10!
x x x x xP x = − + − + − ⋅⋅⋅( ) 1
2! 4! 6! 8! 10!P x = − + − + − ⋅⋅⋅
→

example: ( )cos at 2
y x xπ= =
( ) cosf x x= 02
fπ =
( ) sinf x x′ = − 12
fπ ′ = −
( ) cosf x x′′ = − 0fπ ′′ =
( ) sinf x x′′′ = 12
fπ ′′′ =
( ) ( )4 cosf x x= ( )4 02
fπ =
( )2 3
0 10 1
2 2! 2 3! 2P x x x x
π π π = − − + − + − + ⋅⋅⋅
( ) cosf x x′′ = − 02
fπ ′′ =
( )
3 5
2 2
2 3! 5!
x xP x x
π ππ
− − = − − + − + ⋅⋅⋅
→

Example:
To get the cos(x) for small x:
If x=0.5
cos(0.5) =1-0.125+0.0026041-0.0000127+ …
L+−+−=!6!4!2
1cos642 xxx
x
cos(0.5) =1-0.125+0.0026041-0.0000127+ … =0.877582
From the supporting theory, for this series, the error is no greater than the first omitted term.
0000001.05.0!8
8
==∴ xforx

( ) ( ) ( ) ( ) ( )2 30 00 0
2! 3!
f fP x f f x x x
′′ ′′′′= + + + + ⋅⋅⋅( )sin x
( )sin x
( )cos x
0
1
( ) ( )0nf( ) ( )nf x
( ) 2 3 4sin2
0 1 00 1
! 3! 4!x x x x x
−= + + + + + ⋅⋅⋅( )cos x
( )sin x−
( )cos x−
( )sin x
1
0
1−
0
( )3 5 7
sin 3! 5! 7!
x x xx x= − + − ⋅⋅⋅
Both sides are odd functions.
Sin (0) = 0for both sides.→

2 3 411
1x x x x
x= − + − + + ⋅⋅⋅
+
2
1
1 x+
If we start with this function:
and substitute for , we get:2x x 2 4 6 8
2
11
1x x x x
x= − + − + + ⋅⋅⋅
+
This is a geometric series with a = 1 and r = -x2.
If we integrate both sides:
2 4 6 82
1 1
1dx x x x x dx
x= − + − + + ⋅⋅⋅
+∫ ∫
( )3 5 7
1tan 3 5 7
x x xx x− = − + − + ⋅⋅⋅
This looks the same as the series for sin (x), but without the factorials. →

( ) ( ) ( ) ( ) ( )2 30 00 0
2! 3!
f fP x f f x x x
′′ ′′′′= + + + + ⋅⋅⋅( )ln 1 x+
( )ln 1 x+
( ) 11 x
−+
0
1
( ) ( )0nf( ) ( )nf x
( ) 2 3 4ln 12
1
! 3! 4
20 1
!
3!x x x x x+ = + + + −+− + ⋅⋅⋅
( )1 x+
( ) 21 x
−− +
( ) 32 1 x
−+
( ) 46 1 x
−− −
1
1−
2
6 3!− = −
( )2 3 4
ln 12 3 4
x x xx x+ = − + − + ⋅⋅⋅
→

( ) ( ) ( ) ( ) ( )2 30 00 0
2! 3!
f fP x f f x x x
′′ ′′′′= + + + + ⋅⋅⋅xe
xe
xe
1
1
( ) ( )0nf( ) ( )nf x
2 3 41 1 11 1
2! 3! 4!xe x x x x= + + + + + ⋅⋅⋅
e
xe
xe
xe
1
1
1
1
2 3 4
12! 3! 4!
x x x xe x= + + + + + ⋅⋅⋅
→

Maclaurin Series
A Taylor Series about x = 0 is called Maclaurin.If the function f is “smooth” at x = a, then it can be approximated by the nth degree polynomial
2 3
12! 3!
x x xe x= + + + +K
3 5x x
2 3 4
ln( 1)2 3 4
x x xx x+ = − + − +K
Taylor Series
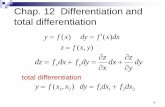
2
( ) ( ) '( )( )
''( )( )
2!
f x f a f a x a
f ax a
≈ + −
+ − +K
2 4
cos 12! 4!
x xx = − + −K
3 5
sin3! 5!
x xx x= − + −K
2 311
1x x x
x= + + + +
−K
( )( )( ) .
!
nnf a
x an
+ −

Taylor’s Theorem: Error Analysis for Series

Taylor series are used to estimate the value of functions (at least theoretically - now days we can usually use the calculator or computer to calculate directly.)
An estimate is only useful if we have an idea of how accurate the estimate is.
When we use part of a Taylor series to estimate the value When we use part of a Taylor series to estimate the value of a function, the end of the series that we do not use is called the remainder. If we know the size of the remainder, then we know how close our estimate is.
→

For a geometric series, this is easy:
ex. 2: Use to approximate over .2 4 61 x x x+ + + 2
1
1 x−( )1,1−
Since the truncated part of the series is: ,8 10 12 x x x+ + + ⋅⋅⋅
the truncation error is , which is .8 10 12 x x x+ + + ⋅⋅⋅8
21
x
x−1 x−
When you “truncate” a number, you drop off the end.
Of course this is also trivial, because we have a formula that allows us to calculate the sum of a geometric series directly.
→

Taylor’s Theorem with Remainder
If f has derivatives of all orders in an open interval Icontaining a, then for each positive integer n and for each xin I:
( ) ( ) ( )( ) ( ) ( )( ) ( ) ( ) ( )2
2! !
nn
n
f fa af f f Rx a a x a x a x a xn
′′′= + + + ⋅⋅⋅ +− − −
Lagrange Form of the Remainder
( )( ) ( )
( ) ( )1
1
1 !
nn
n
f cR x x a
n
++= −
+
Remainder after partial sum Snwhere c is between aand x.
→

Lagrange Form of the Remainder
( )( ) ( )
( ) ( )1
1
1 !
nn
n
f cR x x a
n
++= −
+
Remainder after partial sum Snwhere c is between aand x.
This is also called the remainder of order n or the error term.
Note that this looks just like the next term in the series, but
“a” has been replaced by the number “c” in .( ) ( )1nf c+
This seems kind of vague, since we don’t know the value of c,
but we can sometimes find a maximum value for .( ) ( )1nf c+
→

Lagrange Form of the Remainder
( )( ) ( )
( ) ( )1
1
1 !
nn
n
f cR x x a
n
++= −
+
If M is the maximum value of on the interval between aand x, then:
( ) ( )1nf x+
We will call this the Remainder Estimation Theorem.
between aand x, then:
( ) ( )1
1 !n
n
MR x x a
n+≤ −
+
→

ex. 2: Prove that , which is the Taylor
series for sinx, converges for all real x.
( )( )
2 1
0 1!2 1
kk
k
x
k
+∞
= −+
∑
Since the maximum value of sin x or any of it’s derivatives is 1, for all real x, M = 1.
( ) 110
nR x x+∴ ≤ −
1nx
+
=( )( )
10
!1n
nR x xn
+∴ ≤ −+ ( )!1
x
n=
+
( )
1
lim 0!1
n
n
x
n
+
→∞=
+
so the series converges.
Remainder Estimation Theorem
( ) ( )1
1 !n
n
MR x x a
n+≤ −
+→

ex. 5: Find the Lagrange Error Bound when is used
to approximate and .
2
2
xx −
( )ln 1 x+ 0.1x ≤
( ) ( )ln 1f x x= +
( ) ( ) 11f x x
−′ = +
( ) ( )2
202
xf x Rx x= + − +
On the interval , decreases, so [ ].1,.1− ( )3
2
1 x+
( ) ( ) 21f x x
−′′ = − +
( ) ( ) 32 1f x x−′′′ = +
( ) ( ) ( ) ( ) ( )22
0 00
1 2!
f ff f x x Rx x
′ ′′= + + +
Remainder after 2nd order term
On the interval , decreases, so
its maximum value occurs at the left end-point.
[ ].1,.1− ( )1 x+
( )3
2
1 .1M =
+ − ( )3
2
.9= 2.74348422497≈
→

ex. 5: Find the Lagrange Error Bound when is used
to approximate and .
2
2
xx −
( )ln 1 x+ 0.1x ≤
On the interval , decreases, so [ ].1,.1− ( )3
2
1 x+
Remainder Estimation Theorem
( ) ( )1
1 !n
n
MR x x a
n+≤ −
+
On the interval , decreases, so
its maximum value occurs at the left end-point.
[ ].1,.1− ( )1 x+
( )3
2
1 .1M =
+ − ( )3
2
.9= 2.74348422497≈
( )32.7435.1
3!nR x ≤
( ) 0.000457nR x ≤
Lagrange Error Bound
x ( )ln 1 x+2
2
xx − error
.1 .0953102 .095 .000310
.1− .1053605− .105− .000361
Error is less than error bound. π