Differential Equations (AIMS 2015)
103
Differential Equations AIMS South Africa Joseph Malinzi and Sicelo Goqo School of Mathematical Sciences University of KwaZulu-Natal, Pietermaritzburg [email protected] and [email protected] November 2015
-
Upload
robin-red-msiska -
Category
Documents
-
view
77 -
download
4
description
Note for the course presented at the African Institute for Mathematical Sciences (AIMS), in Cape Town, South Africa.
Transcript of Differential Equations (AIMS 2015)

Differential EquationsAIMS South Africa
Joseph Malinzi and Sicelo Goqo
School of Mathematical SciencesUniversity of KwaZulu-Natal, Pietermaritzburg
[email protected] and [email protected]
November 2015

Contents
1 Analytic Techniques for Solving First Order Differential Equations: 3
1.1 Meaning of a differential equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
1.2 Definition of terms . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Solution to a differential Equation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4 Separation of variables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.5 Exact equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Not Exact : Integrating Factors . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.6.1 First Order Linear Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.6.2 First Order General Equations . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
1.7 Equations with Homogeneous Coefficients . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.7.1 Homogeneous functions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
1.7.2 The substitution y = vx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2 Introduction to dynamical systems 24
2.1 First-order continuous dynamical systems . . . . . . . . . . . . . . . . . . . . . . . . . 27
2.2 Autonomous and non-autonomous systems . . . . . . . . . . . . . . . . . . . . . . . . 28
2.2.1 A higher order equation as a System of first order equations . . . . . . . . . . . 28
2.3 Equilibrium, fixed points or steady states . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4 Stability of fixed points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
2.4.1 Derivative test for stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
2.5 The Potential . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.6 Phase Portrait . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
1

2.7 Bifurcations of equilibria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.7.1 Saddle-node bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.7.2 Transcritical bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.7.3 Pitchfork bifurcation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
2.8 Flow on a circle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.9 Oscillations . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
2.10 Discrete dynamical systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
2.11 Fixed points and stability . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.11.1 Stability analysis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 40
2.12 Graph of a function . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.13 The cobweb diagram . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.14 Calculating the Liapunov exponent . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
2.15 Bifurcation diagrams . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.15.1 Constructing bifurcation diagrams . . . . . . . . . . . . . . . . . . . . . . . . . 46
2.16 Brief Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
2.17 Exercises: One-dimensional maps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
3 Second-order linear systems 50
3.1 Fixed points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.1.1 Classification of fixed points . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.2 Eigenvalues of higher order matrices . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
3.2.1 Routh-Hurwitz criteria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
3.3 Summary - characterization of fixed points . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.1 The stability of nodes and spirals . . . . . . . . . . . . . . . . . . . . . . . . . . 55
3.3.2 Degenerate node . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3.4 Solving homogeneous systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
4 Phase plane analysis 64
4.1 Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
2

4.1.1 Fixed Points and Linearization . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
4.1.2 The effect of small nonlinear terms . . . . . . . . . . . . . . . . . . . . . . . . 66
4.1.3 Polar coordinates . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
4.1.4 Hyperbolic Fixed points . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.1.5 Topological equivalence . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.1.6 Conservative Systems . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
4.2 Limit cycles and periodic solutions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
4.2.1 Existence and non-existence of periodic orbits . . . . . . . . . . . . . . . . . . 70
4.2.2 Van der Pol Oscillator . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2.3 Liénard System . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2.4 Weakly nonlinear oscillators . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
4.3 Exercises: One-dimensional maps . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
1

References
You will find the following books particularly useful for this module.
• Bernd J. Schroers. Ordinary Differential Equations: A Practical Guide. Cambridge 2011
• Zill, D. G and Cullen M. R. Differential Equations with Boundary-Value Problems, Sixth or lateredition.
• Nagle, R. K and Saff, E. B. Fundamentals of Differential Equations and Boundary Value Problems.1993 or later editions.
• Steven Strogatz. Nonlinear Dynamics and Chaos.
• Jordan, D. Nonlinear ordinary differential equations: an introduction to dynamical systems.
2

Chapter 1
Analytic Techniques for Solving First OrderDifferential Equations:
1.1 Meaning of a differential equation
A differential equation is an equation that involves derivatives of some unknown function. If the un-known function is a function of a single independent variable then the differential equation is called anordinary differential equation. If the unknown function depends on two or more independent variablesthen the differential equation is called a partial differential equation. Equations
1. y′+xy = 3 2. y′′+5y′+6y = cos x 3. y′′ = (1+y′2)(x2+y2) 4. ∂2u∂t2 − ∂2u
∂x2 = 0 and 5. ∂u∂t = 3∂u
∂xare all differential equations.
In equations (1)-(3) the unknown function is y and is assumed to be a function of the single independentvariable x, (i.e y = y(x)). The functions y′ and y′′ are the first and second derivatives of y(x) with respect
to x ( usually denoted by dydx ,
d2ydx2 ). the equations (1)- (3) have ordinary derivatives depending on one
single variable x and are called ordinary differential equations.
In equations (4) and (5) the unknown function u is a function of two independent variables t and x (and
is usually written as (u(t,x) or u(x, t)). We define ∂u∂x and ∂2u
∂x2 as the first and second partial derivative of uwith respect to x respectively. And equations (4) and (5) are called partial differential equations becausethey involve partial derivatives.
3

1.2 Definition of terms
(a) The order of a differential equation is the order of the highest derivative which occurs in theequation. For example
dydx = x+2 order 1 (or first order)
d2ydx2 +2dy
dx +3y = 0 second order
xy′+3y = 4 first order
(y′′)2− (y′)3 +2y = 5x second order∂z∂x = z+ x ∂z
∂y first order
∂2z∂x2 +
∂2z∂y2 = x2 + y second order
(b) Generally the equationF(x,y,y′,y′′, . . . ,y(n)) = 0 (1.1)
is called an nth order ordinary differential equation, for the unknown function y.
An nth order differential equation is said to be linear differential equation if it is of the specialform
a0(x)y(n)+a1(x)y(n−1)+ . . .+an−1(x)y′+an(x)y = f (x). (1.2)
where the functions ai(x); i= 0,1,2, . . . ,n and f (x) are given functions independent of the variabley, with a0(x) 6= 0. In general, the nth-order equation (1.2) is linear if the function F(x,y′,y′′ . . .y(n))is a first degree polynomial in y,y′,y′′, . . . ,y(n). The functions ai(x), i = 0,1,2, . . . ,n are known asthe coefficients of the differential equation.
(c) If any one of the functions ai(x), i = 0,1,2, . . . ,n is a function of y the differential equation (1.2) isnonlinear.
When the function f (x) in the differential equation (1.2) is identically zero, we say that the differ-ential equation (1.2) is homogeneous, and when f (x) is not identically zero then (1.2) is nonhomo-geneous.
If all the coefficients ai(x); i = 0,1,2, . . . ,n are constants, then the equation (1.2) is known as alinear differential equation with constant coefficient. Otherwise if only one of the coefficientsai(x), i = 0,1,2, . . . ,n is a variable then the differential equation is variable coefficient.
The term linear refers to the fact that each expression in the differential equation is of degree oneor zero in the variables y,y′, . . . ,y(n).
4

1.3 Solution to a differential Equation
Definition 1 A solution of an nth order ordinary differential equationF(x,y,y′, . . . ,y(n)) = 0 is a function y(x) defined over an interval I which satisfies the differential equationand is such that
(i) y(x) should have at least n derivatives
(ii) F(x,y(x),y′(x), . . . ,y(n)(x)) = 0, for all x ∈ I.
Example 1.3.1
(i) The function y(x) = ex is a solution to the differential equation y′′− y = 0.In fact y′′(x)− y(x) = (ex)′′− ex = ex− ex = 0 for all x ∈ (−∞,∞)
(ii) The function y(x) = cos x is a solution of y′′+ y = 0for y′′(x)+ y(x) = (cos x)′′ =−cos x+ cos x = 0 for all x ∈ (−∞,∞)
(iii) The function y =√
x(x−1) is a solution of y′ = (1−2x)2y valid only in x ∈ [0,1)
(iv) The function y =√
x is a solution of the equation y′ = 12y valid only in (0,+∞)
The differential equation y′′−y= 0 given in (i) above, the function y= e−x is a solution too and moreover,y = c1ex + c2e−x is again a solution to y′′− y = 0 for some constants c1 and c2.
Therefore the process of finding a solution to a differential equation is to focus one’s mind to a uniquesolution (called a primitive) that was differentiated to have the combination terms of the differentialequation satisfied.
Such a primitive function of a differential equation is called the general solution of the differentialequation.
Definition 2 A solution to a differential equation that comes from particular qualities specified togetherwith the equation is called the particular solution. Such a differential equation that has initial conditionsthat will result into a particular solution is called an initial value problem (IVP).
Given any primitive we can in some way obtain a differential equation that is associated with it byeliminating the constants involved.
Exercise
Classify the following differential equations as to linearity, nature of coefficients, order and homogeneity
5

a xy′′−2exy′−5x = 0
b y′′−4y′−3cos x = 5y
c 3y′′′−4y′′+ xy = 11
d y′′′−6y′′−17y′ = xey
e (y′′)2−4y′+5y = 6x
f y(4)−5y′′+11y = 0
g y′′′+5y′′−6y′ = cos xy
h y(4)+3(cos x)y′′′+(y′)2 = 0
i y′′′ = 5
j y′′′− 5x = 0
1.4 Separation of variables
A first order differential equation is said to be separable if it is of the form
dydx
=g(x)f (y)
(If can separate xs on one side and ys on the other. dx and dy should always be the Numerators)such that f (y)dy = g(x)dx and on integration gives
∫f (y)dy =
∫g(x)dx ⇒ F(y)+ c1 = G(x)+ c2
⇒ F(y) = G(x)+C. The method used to solve simple separable differential equations is known as themethod of separation of variables.
Example 1.4.1 Solve the differential equation dydx = 2xy
Solution: By separation of variables
dyy
= 2x dx ⇒∫ dy
y=
∫2x dx ⇒ ln y = x2 + c ⇒ ln y = x2 + ln A
y = Aex2
6

Example 1.4.2
dydx− y = 1
dy− ydx = dxdy = (1+ y)dx
dy(1+ y)
= dx
∫ dy(1+ y)
=∫
dx
ln(1+ y) = x+ lnAy = A lnex−1
The constant A can be got out if given initial conditions.
Example 1.4.3
1. Solve the differential equation: dydx =
y−1x+3
Solution: By separation of variables
dyy−1
=dx
x+3⇒
∫ dyy−1
=∫ dx
x+3⇒ ln (y−1) = ln k(x+3) ⇒ y = 1+ k(x+3)
2. Solve the differential equation: dydx =
6x5−2x+1cos y+ey
Solution: By separation of variables
(cos y+ ey)dy = (6x5−2x+1)dx ⇒∫(cos y+ ey)dy =
∫(6x5−2x+1)dx
⇒ siny+ ey = x6− x2 + x+ c
3. Solve the differential equation√
ydx+(1+ x)dy = 0; y(1) = 1.
Solution: By separation of variables
1√y
dy =− 11+ x
dx ⇒∫ 1√
ydy =−
∫ 11+ x
dx ⇒ 2√
y =− ln (1+ x)+ c
7

and y(1) = 1⇒ 2 =− ln 2+ c ⇒ c = 2− ln2
Thus 2√
y =− ln(1+ x)+2− ln2 ⇒ 2√
y = 2− lnx+1
2⇒ y =
[1− ln
√x+1
2]2.
1.5 Exact equations
Any first order differential equation dydx = f (x,y) can be expressed in the form
M(x,y)dx+N(x,y)dy = 0 (1.3)
Example 1.5.1
1. dydx =
3x2−yx−1 ⇒ (y−3x2)dx+(x−1)dy = 0 in which M(x,y) = y−3x2 and
N(x,y) = x−1.
Definition 3 A first-order differential equation whose LHS expressions can be easily regrouped intototal differentials is said to be exact differential equation
Theorem 1.1 The first-order differential equation M(x,y)dx+N(x,y)dy = 0 is exact iff
∂M(x,y)∂y
=∂N(x,y)
∂x
(The opposites) where the partial derivatives are continuous functions.
Proof:
Assume M(x,y)dx+N(x,y)dy = 0 is exact. Then there exists a function F(x,y) satisfying
∂F∂x
= M(x,y) and∂F∂y
= N(x,y)
(Since for any function F(x,y),dF(x,y) = ∂F∂x dx+ ∂F
∂y dy)
Then∂M∂y
=∂
∂y
(∂F∂x
)=
∂2F∂x∂y
and∂N∂x
=∂
∂x
(∂F∂y
)=
∂2F∂x∂y
.
8

Hence∂M∂y
=∂2F∂y∂x
=∂2F∂x∂y
=∂N∂x
To solve the exact equation M(x,y)dx+N(x,y)dy = 0
(a) We let the solution to take the form F(x,y) = c, such that ∂F∂x = M(x,y),
and ∂F∂y = N(x,y). (The sames)
Then F(x,y) =∫
M(x,y)dx+g(y) (1.4)
(b) To determine g(y) we take the partial derivatives with respect to y of both sides of (1.4) to give
∂F∂y
=∂
∂y
∫M(x,y)dx+
∂
∂y(g(y)) =
∂
∂y
∫M(x,y)dx+g′(y) = N(x,y).
Then g′(y) = N(x,y)− ∂
∂y∫
M(x,y)dx gives g(y) =∫[N(x,y)− ∫
M(x,y)dx]dy, so that F(x,y) =
∫M(x,y)dx+
∫[N(x,y)− ∫
M(x,y)dx]dy = c.
Example 1.5.2
Solve the differential equation: (x2 + y2)dx+(2xy)dy = 0.
Solution: Let M(x,y) = x2 + y2 then ∂M∂y = 2y. And N(x,y) = 2xy, then ∂N
∂x = 2y. Since ∂M∂y = 2y = ∂N
∂x
then the differential equation is exact. Let the solution be of the form F(x,y) = c in which ∂F∂x = M(x,y)
and ∂F∂y = N(x,y). Then ∂F
∂x = M(x,y) = x2 + y2
⇒ F(x,y) =∫(x2 + y2)dx =
13
x3 + xy2 +g(y)
And ∂F∂y = 2xy+g′(y) = N(x,y) = 2xy ⇒ g′(y) = 0⇒ g(y) = c.
9

Then F(x,y) =13
x3 + xy2 +g(y) gives the solution F(x,y) =13
x3 + xy2 +C
Example 1.5.3 Solve the ordinary differential equation
(x+ y)2dx+(2xy+ x2−1)dy = 0
F =x3
3+ x2y+ y2x− y
Example 1.5.4 Solve the differential equation: (2xy− sec2 x)dx+(x2 +2y)dy = 0.
Solution: Let M(x,y) = 2xy− sec2 x, then ∂M∂y = 2x. And N(x,y) = x2 + 2y, then ∂N
∂x = 2x. Since
∂M∂y = 2x = ∂N
∂x then the differential equation is exact. Let the solution be of the form F(x,y) = c in which
∂F∂x = M(x,y) and ∂F
∂y = N(x,y). Then ∂F∂x = M(x,y) = 2xy− sec2 x
⇒ F(x,y) =∫(2xy− sec2 x)dx = x2y− tan x+g(y)
And ∂F∂y = x2 +g′(y) = N(x,y) = x2 +2y ⇒ g′(y) = 2y⇒ g(y) = y2.
Then F(x,y) = x2y− tan x+ y2 = c gives the solution x2y− tan x+ y2 = c
Example 1.5.5 Solve the differential equation: (1+ exy+ xexy)dx+(xex +2)dy = 0.
Solution: Let M(x,y) = 1+ exy+ xexy; then ∂M∂y = ex + xex. And let
N(x,y) = xex + 2; then ∂N∂x = xex + ex. Since ∂M
∂y = ex + xex = ∂N∂x then the equation is exact. Let the
solution take the form F(x,y) = c, with ∂F∂x = M(x,y) and ∂F
∂y = N(x,y). Then
∂F∂y
= N(x,y) = xex +2 ⇒ F(x,y) =∫(xex +2)dy ⇒ F(x,y) = xexy+2y+T (x).
10

From which we have
∂F∂x
= exy+ xexy+T ′(x) = M(x,y) = 1+ exy+ xexy ⇒ T ′(x) = 1⇒ T (x) = x.
Then F(x,y) = c gives xexy+2y+ x = c
Example 1.5.6 Solve the differential equation: (x+ y)2dx+(2xy+ x2−1)dy = 0.
[Ans : F(x,y) = x3
3 + x2y+ y2x− y− 43 ]
Example 1.5.7 Solve the differential equation:(3x2−2xy+2)dx+(6y2− x2 +3)dy = 0
Solution: M(x,y) = 3x2−2xy+2, ⇒ ∂M∂y =−2x
N(x,y) = 6y2− x2 +3, ⇒ ∂N∂x =−2x.
Since ∂M∂y =−2x = ∂N
∂x , the equation is exact.
Let the solution be F(x,y) = c with
∂F∂x
= M(x,y) = 3x2−2xy+2 (1.5)
∂F∂y
= N(x,y) = 6y2− x2 +3 (1.6)
Then (1.5) gives F(x,y) =∫(3x2−2xy+2)dx = x3− x2y+2x+g(y) (1.7)
And (1.6) gives F(x,y) =∫(6y2− x2 +3)dy = 2y3− x2y+3y+ f (x) (1.8)
Equations (1.7) and (1.8) are equal and
x3− x2y+2x+g(y) = 2y3− x2y+3y+ f (x)
11

from which we see thatg(y) = 2y3 +3y and f (x) = x3 +2x
And using g(y) in (1.7) or f (x) in (1.8) gives the solution as x3− x2y+2x+2y3 +3y = c
Exercise 1.5.1
1. Use separation of variables to solve the differential Equations
(a) dydx =
x2−1y2
(b) dydx = y(2+ sin x)
(c) dydx = 3x2(1+ y2)
(d) dydx + y2 = y
(e) dydx =
sec2 y1+x2
(f) ysinxecosxdx+ y−1dy = 0
(g) (x+ xy2)dx+ ex2ydy = 0
(h) x2dx+2ydy = 0; y(0) = 2
2. Test for exactness and solve if exact.
(a) 3x3y2y′+3x2y3−5x4 = 0
(b) (3x2y2−4xy)dy+(2xy3−2y2)dx = 0
(c) xexydy+(yexy−4x3)dx = 0
(d) (x+ y2)y′+2x2− y = 0
(e) (x2− y)dx+(2x2 +2xy)dy = 0
(f) cos (x2 + y)−3xy2]y′+2xcos (x2 + y)− y3 = 0
(g) (2xy+3)dx+(x2−1)dy = 0
(h) (x+ ysin x)dy+(y+ xsin y)dx = 0
12

1.6 Not Exact : Integrating Factors
An integrating factor is a term which multiplied through, it makes the DE, exact.
Definition 4 A first order differential equation is said to be linear if it takes the form
a1(x)dydx
+a0(x)y = b(x) (1.9)
where a1(x),a0(x),b(x) are continuous functions that depend only on the independent variable x.
Example 1.6.1
1. x2 sin (x− cos x)y = (sin x)dydx is linear since it can be written in the form
(sin x)dydx +(cos x)y = x2 sin x
2. ydydx +(sinx)y3 = ex +1 is not linear due to the presence of terms y3 and ydy
dx
If we divide through (1.9) by a1(x) we write equation (1.9) in standard form
dydx
+P(x)y = Q(x) (1.10)
where P(x) and Q(x) are functions of x or constants.
1.6.1 First Order Linear Equations
Suppose (1.10) is written in the form
[P(x)y−Q(x)]dx+dy = 0 (1.11)
Let M(x,y) = P(x)y−Q(x), and N(x,y) = 1. Then ∂M∂y = P(x) and ∂N
∂x = 0 in which case the equation
is not exact. Let by multiplying through equation (1.11) by µ(x) make it exact. Then [(µ(x)P(x).y−µ(x)Q(x)]dx+µ(x)dy = 0 implies that
∂M∂y = µ(x)P(x)∂N∂x = dµ(x)
dx
}(1.12)
13

and for exact ∂M∂y = ∂N
∂x ⇒ µ(x)P(x) = dµ(x)dx which on separating of variables gives
∫ dµµ(x) =
∫P(x)dx from which we have
µ(x) = e∫
P(x)dx (1.13)
Then (1.13) is our desired integrating factor; and clearly since µ(x)P(x)= dµ(x)dx then µ(x)dy
dx +P(x)µ(x)y=
µ(x)Q(x) ⇒ µ(x)dydx +
dµ(x)dx y = µ(x)Q(x)
⇒ ddx(µ(x).y) = µ(x)Q(x) ⇒ µ(x)y =
∫µ(x)Q(x)dx+ c. Thus
y = µ(x)−1(∫
µ(x)Q(x)dx+ c) is the general solution to (1.10) where µ(x) = e∫
P(x)dx.
Example 1.6.2
1. Solve the differential equation: dydx +2y = 3ex
Solution: Integrating factor = e∫
P(x)dx = e∫
2dx = e2x. Then multiplying through by the integratingfactor, gives
e2x dydx +2e2xy = 3e3x ⇒ d
dx(e2xy) = 3e3x e(2x)y =
∫3e3xdx = e3x + c
Therefore y = ex + ce−2x.
2. Solve the differential equation:1x
dydx −
2yx2 = xcos x; y(π
2 ) = 3
Solution: Rewrite the differential equation as
dydx− 2
xy = x2 cos x.
Then the Integrating factor= e∫ − 2
x dx = e−2lnx = 1x2 . Thus 1
x2dydx − 2
x3 y = cos x
⇒ ddx(
1x2 y)= cos x⇒ 1
x2 y= sin x+c. And y(π
2 )= 3⇒ c=(12π2 −1) gives the solution y= x2 sin x+
(12π2 −1)x2.
14

1.6.2 First Order General Equations
Consider the general first-order differential equation
M(x,y)dx+N(x,y)dy = 0 (1.14)
with its conditions for exactness ∂M∂y = ∂N
∂x Suppose equation (1.14) is not exact. Let, by multiplying
through (1.14) by µ(x,y) make it exact. Then if
µ(x,y)M(x,y)dx+µ(x,y)N(x,y)dy = 0 (1.15)
is exact, we must have
∂
∂y[µ(x,y)M(x,y)] =
∂
∂x[µ(x,y)N(x,y)] (1.16)
On differentiating by product rule (1.16) gives
M∂µ∂y
+µ(x,y)∂M∂y
= N∂µ∂x
+µ(x,y)∂N∂x
⇒M∂µ∂y−N
∂µ∂x
=
(∂N∂x− ∂M
∂y
)µ(x,y) (1.17)
Then we have the following situations of equation (1.17):
1. If µ(x,y) is a function of x only, then ∂µ∂y = 0 and ∂µ
∂x = dµdx . In this case equation (1.17) gives
−Ndµdx
=
(∂N∂x− ∂M
∂y
)µ(x)
or
dµdx
=1N
(∂M∂y− ∂N
∂x
)µ(x) (1.18)
15

And if 1N (
∂M∂y − ∂N
∂x ) is a function of x only, say f (x) or a constant, (1.18), would reduce to dµdx =
f (x)µ(x) which on separation of variables gives
∫ dµµ(x)
=∫
f (x)dx ⇒ ln µ(x) =∫
f (x)dx ⇒ µ(x) = e∫
f (x)dx (1.19)
2. If µ(x,y) is a function of y only, then ∂µ∂x = 0 and ∂µ
∂y = dµdy . In this case equation (1.17) gives
Mdµdy
=−(
∂M∂y− ∂N
∂x
)µ(y)
or
dµdy
=− 1M
(∂M∂y− ∂N
∂x
)µ(y) (1.20)
And if 1M (∂M
∂y − ∂N∂x ) is a function of y only, say g(y) or a constant; we get
dµdy
=−g(y)µ(y) (1.21)
which on separation of variables gives
∫ dµµ(y)
=−∫
g(y)dy ⇒ lnµ(y) =−∫
g(y)dy ⇒ µ(y) = e−∫
g(y)dy (1.22)
The following is the summary:If M(x,y)dx+N(x,y)dy = 0 is neither simple separable, nor linear, compute ∂M
∂y and ∂N∂x .
(a) If ∂M∂y = ∂N
∂x then the equation is exact. If ∂M∂y 6= ∂N
∂x then the equation is not exact.
(b) Compute 1N (
∂M∂y − ∂N
∂x ). If this is a function of x only, say f (x); or C (The opposites) then the
integrating factor is µ(x) = e∫
f (x)dx. If it is not a function of x only then
16

(c) Compute 1M (∂M
∂y − ∂N∂x ). If this is a function of y only, say g(y); or C (The opposites) then the
integrating factor is µ(y) = e−∫
g(y)dy.Then multiplying through the equation by the integrating factor will make the equation exact andthe method of solving exact follows.
Example 1.6.3 Solve the differential equation
(2x2 + y)dx+(x2y− x)dy = 0 (1.23)
Solution: The equation (1.23) is neither separable nor linear.
M(x,y) = 2x2 + y, ⇒ ∂M∂y
= 1 N(x,y) = x2y− x, ⇒ ∂N∂x
= 2xy−1
Since ∂M∂y = 1 6= 2xy−1 = ∂N
∂x , the equation is not exact. We compute
1N(∂M∂y− ∂N
∂x) =
1−2xy+1x2y− x
=2(1− xy)−x(1− xy)
=−2x
(a function of x only).
Then the Integrating factor is µ(x) = e∫
f (x)dx = e∫ − 2
x dx = e−2ln x = 1x2 . Multiplying through by the
intergrating factor gives1x2 (2x2 + y)dx+ 1
x2 (x2y− x)dy = 0, which is exact.
Cleary 2dx+ x−2ydx+ ydy− x−1dy = 0⇒ 2dx+(x−2ydx− x−1dy)+ ydy = 0⇒ 2dx+ d
dx(x−1y)+ ydy = 0 ⇒ ∫
2dx+∫
d(x−1y)+∫
ydy =∫
0dx
⇒ 2x− x−1y+ 12y2 = c.
Example 1.6.4 Solve the differential equation: (y2 +2xy)dx− x2dy = 0
Solution: M(x,y) = y2 +2xy, ⇒ ∂M∂y = 2y+2x N(x,y) =−x2, ⇒ ∂N
∂x =−2x
Since ∂M∂y = 2y+2x 6=−2x = ∂N
∂x the equation is not exact.
We check
1N
(∂M∂y− ∂N
∂x
)=
[2y+2x− (−2x)]−x2 =
2y+4x−x2
17

which is not a function of x only. We check
1M
(∂M∂y− ∂N
∂x
)=
[2y+2x− (−2x)]y2 +2xy
=2y+4xy2 +2xy
=2(y+2x)y(y+2x)
=2y
= g(y), (a function of y only)
Then the integrating factor is µ(y) = e−∫
g(y)dy = e−∫ 2
y dy = e−2lny = 1y2 .
And 1y2 (y2 +2xy)dx− x2
y2 dy = 0 is exact.
Thus dx+2xy−1dx− x2y(−2)dy = 0 ⇒ dx+ ddx(y
−1x2) = 0
⇒ ∫dx+
∫d(y−1x2) =
∫0.dx ⇒ x+ y−1x2 = c ⇒ xy+ x2 = cy.
Example 1.6.5 Solve the differential equation
(2xy)dx+(y2−3x2)dy = 0 (1.24)
Solution: The equation (1.24) is neither separable nor linear.
M(x,y) = 2xy, ⇒ ∂M∂y
= 2x N(x,y) = y2−3x2, ⇒ ∂N∂x
=−6x
Since ∂M∂y = 2x 6=−6x = ∂N
∂x , the equation is not exact. We compute
1N
(∂M∂y− ∂N
∂x
)=
8x2xy
=4y
(not a function of x only).
We compute
1M
(∂M∂y− ∂N
∂x
)=
8xy2−3x2 (not a function of y only).
thus the method cant solve it.
18

Example 1.6.6 Solve the differential equation
(2xy− y2)dx = (x2−2y3)dy (1.25)
Solution: We first rearrange in order (2xy− y2)dx− (x2−2y3)dy = 0 ⇒(2xy− y2)dx+(2y3− x2)dy = 0The equation (1.25) is neither separable nor linear.
M(x,y) = 2xy− y2, ⇒ ∂M∂y
= 2x−2y N(x,y) = 2y3− x2, ⇒ ∂N∂x
=−2x
Since ∂M∂y 6= ∂N
∂x , the equation is not exact. We compute
1N
(∂M∂y− ∂N
∂x
)=
4x−2y2y3− x2 (not a function of x only).
We compute
1M
(∂M∂y− ∂N
∂x
)=
4x−2y2xy− y2 =
2(2x− y)y(2x− y)
=2y
( a function of y only).
Then the Integrating factor is µ(y) = e−∫
g(y)dy = e∫ − 2
y dy == 1y2 . Multiplying through by the intergrating
factor makes it an exact ordinary differential equation which we can solve.
Exercise 1.6.1
(i) Solve the differential equations:
(1) y′+3y = x+ e−2x
(2) y′−2y = x2e2x
(3) xy′+2y = x2− x+1; y(1) = 12
(4) y′+2xy = 2xe−x2
(5) xy′+ y = 3xcos 2x
(6) (1+ x2)y′+4xy = (1+ x2)−2
19

(7) y′+ y = xe−x +1
(8) dxdy = ey− x; y(1) = 0
(ii) Solve the differential equations:
(1) (12y2 +2yex)dx+(y+ ex)dy = 0
(2) (3x2 + y)dx+(x2y− x)dy = 0
(3) (x4− x+ y)dx− xdy = 0
(4) (2xy)dx+(y2−3x2)dy = 0
(5) (2y2x− y)dx+ xdy = 0
(6) (y2 +2xy)dx+ xdy = 0
(7) (2y3 +2y2)dx+(3y2 +2xy)dy = 0
(8) (3x2y+2xy+ y3)dx+(x2 + y2)dy = 0
1.7 Equations with Homogeneous Coefficients
1.7.1 Homogeneous functions
Consider a first order differential equation M(x,y)dx+N(x,y)dy = 0. Then the functions M(x,y) andN(x,y) are said to be homogeneous if they both contain expressions of the same degree.
More generally, a function f (x,y) is said to be a homogeneous function of degree n if f (ax,ay) =
an f (x,y). And to a first order differential equation dydx = f (x,y) if the righthand side function f (x,y) can
be written as a function of the ratio yx alone then the equation is homogenous.
Example 1.7.1
1. The function f (x,y) = 2x2 + y2 is homogeneous with degree 2 because
f (ax,ay) = 2(ax)2 +(ay)2 = a2(2x2 + y2) = a2 f (x,y).
2. The function f (x,y) = x−3√
xy+5y is homogeneous with degree 1 because
f (ax,ay) = (ax)−3√
(ax)(ay)+5(ay) = a(x−3√
xy+5y) = a f (x,y).
3. The function f (x,y) =√
x3 + y3 is homogeneous with degree 32 because
f (ax,ay) =√
(ax)3 +(ay)3 =√
a3x3 +a3y3 = a32√
x3 + y3 = a32 f (x,y).
20

4. The function f (x,y) = x2y +4 is homogeneous with degree zero because
f (ax,ay) = ax2ay +4 = ax
a(2y) +4 = a0( x2y +4) = a0 f (x,y).
5. dydx =
x−yx = 1− ( y
x) is homogeneous
6. dydx =
y2+2xyx2 = ( y
x)2 +2( y
x) is homogeneous
7. dydx = ln x− ln y+ x+y
x−y = ln 1yx+
1+ yx
1− yx
is homogeneous
8. dydx =
x3−4xyx2 = x−4( y
x ) is not homogeneous.
Also for the following functions:
1. M(x,y) = x2 + xy+ y2 is homogeneous function because each function involved is of degree 2
2. M(x,y) = 2x+ y is homogeneous with degree 1
3. M(x,y) = x3−2xy2−5 x4
y is homogeneous with degree 3
4. M(x,y) = x2−3xy+2 is not homogeneous because of a 2 with degree zero.
5. M(x,y) = 3x2−5x2y+4y is not homogeneous because 3x2 is of degree 2, 5x2y is of degree 3 and4y is of degree 1.
1.7.2 The substitution y = vx
If the degree of all the functions in M(x,y) is the same as the degree of the functions in N(x,y) then theRHS of the differential equation
dydx
=−M(x,y)N(x,y)
= f (x,y)
can clearly be written as a ratio of yx alone and the substitution y = vx solves such a differential equation.
21

Summary 1.7.1 If M(x,y) is the same as the degree of the functions in N(x,y), then use the substitutiony = vx =⇒ dy = vdx+ xdv which will become a separable DE in x and v. and later substitute y backin the answer.
But first check if the differential equation is not separable, exact or linear as these are easily solved withmethods mentioned earlier.
Example 1.7.2
1. Solve the differential equation (x− y)dx+ xdy = 0
Solution: M(x,y) = x− y and N(x,y) = x both are of degree 1.
Let y = vx, then dy = vdx+ xdv. And (x− y)dx+ xdy = 0
⇒ (x−xv)dx+x(vdx+xdv)= 0 ⇒ (1−v)dx+vdx+xdv= 0 ⇒ dx+xdv= 0 which on separation
of variables and integration gives ln x=−ν+c ⇒ ln cx = ν. And this leads to the solution xe
yx = c.
2. Solve the differential equation: (xy+ y2 + x2)dx− x2dy = 0
Solution: Both M(x,y) = xy+ y2 + x2 and N(x,y) =−x2 have functions of the same degree.
Let y = vx, dy = vdx+ xdv. Then (x.xv+ v2x2 + x2)dx− x2(vdx+ xdv) = 0⇒ (v+ v2 +1)dx− vdx− xdv = 0⇒ (v2 +1)dx = xdv so that
∫ 1x dx =
∫ 1v2+1dv
⇒ ln x = tan−1 v+ c ⇒ tan−1 yx = ln Ax ⇒ y = x tan(ln Ax).
3. Solve the differential equation: (y2 +2xy)dx− x2dy = 0
Solution. The differential equation is rewritten as
⇒ dydx
=y2 +2xy
x2 = (yx)2 +2
yx.
And y = vx⇒ dydx = v+ xdv
dx gives v+ xdvdx = v2 +2v⇒ xdv
dx = v2 + v
⇒ 1x dx = (1
v − 1v+1)dv. Then
∫ 1x dx =
∫(1
v − 1v+1)dv ⇒ ln x = ln v− ln (v+1)+ c.
⇒ ln Ax = ln vv+1 ⇒ Ax = v
v+1 ⇒ Ax =yx
yx+1 = y
y+x . Therefore y = Ax2
1−Ax .
22

Solve the differential equations:
1. (x2 + y2)dx+2xydy = 0 2. (y2− xy)dx+ x2dy = 03. (xy+ y2)dx− x2dy = 0 4. (3x2− y2)dx+(xy− x3y−1)dy = 05. y(lny− lnx+1)dx− xdy = 0 6. (2xy+ y2)dx− (x2 + xy+ y2)dy = 07. (x2 +2y2)dx− (2xy+ y2)dy = 0 8. (y4 + x3y)dx− x4dy = 0
Section B
23

Chapter 2
Introduction to dynamical systems
Expected Learning Outcomes
My expectations are that when we are done with this chapter, you should be able to:
• Convert higher order equations into a system of first order autonomous equations.
• Calculate equilibrium points (sometimes also called fixed points or steady states).
• Use the stability theory to decide whether the equilibrium points are stable, neutrally stable orunstable.
• Sketch phase portraits for one-dimensional system.
What is a Dynamical System?
The word “dynamics” refers to how a situation, system or phenomenon changes over the course of time.
A technical definition of a dynamical system is as follows
Definition 5 1 A dynamical system consists of a state P at time t and a family of transformations gt :P→ P, where the time t may be either discrete, t ∈ Z, or continuous, t ∈ R.
For arbitrary states x ∈ P the following must hold:
1. g0(x) = x; identity and
2. gt(gs(x)) = gt+s(x), ∀ t,s ∈ R: additivity
1Introduction to Dynamical Systems, Lecture Notes for MAS424/MTHM021 (Version 1.2, 18/04/2008), Rainer Klages.
24

In other words, a dynamical system is a mathematical formula for evolving the state of a system in time.
Other possible answers to the above question may include the following:
1. Any system whose “state” changes when an independent variable (such as time) changes is adynamical system.
2. Any system that allows us to determine the future states of a system given its present or past state.
The initial value problem
dxdt
=−2x, x(t0) = x0,
describes a dynamical system.
Here x(t)is the dynamical system with initial state x(t0) = x0 and whose future state can be de-duced from the solution:
x(t) = x0e−2(t−t0) for t ≥ t0.
1. Why study dynamical systems?
The basic goal of dynamical systems is to determine or characterize the long term behaviour of a system(long term means as t→ ∞).
For example, the logistic equation
d pdt
= rp(
1− pk
),
defines a dynamical system p(t), the population with growth rate r(t).
In studying this system we want to know how the population would shape up in the future. We want toanswer some or all of the following questions;
1. would the population numbers eventually explode (i.e grow to infinite)?
2. would the population eventually collapse (i.e would the human race become extinct in future)?
3. would the population stabilize? and if so, at what value? Its about 6 billion now, how far can wekeep own growing in numbers before we become a danger to ourselves, the numbers threaten ourown existence?
25

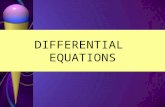
Dynamical Systems
Deterministic Dynamical Systems Stochastic Dynamical Systems
Discrete Time DS
MapsDifference Equations
Continuous Time DS
Ode’s, Pde’s? ?
Figure 2.1: Characterization of Dynamical Systems
2. Deterministic and stochastic dynamical systems
In this module we consider only deterministic dynamical systems which are defined by rules,formulas or functions to indicate how the future states are obtained from the present or the paststates of the system. Differential and difference equations define deterministic dynamical systems.
Continuous dynamical systems
These, as the name suggests, are dynamical systems that continuously depend on time. These sys-tems are defined in terms of differential equations and have particular applications to mechanicalsystems, population dynamics, ecology, etc.
An example of continuous dynamical system is the driven pendulum of unity mass (M = 1) with atorque applied at the pivot and subject to gravity described by the equation
d2θ
dt2 + kdθ
dt+ sinθ = Asin(2π f t),
where θ is a dynamical variable describing the state of the system (the angle between the mass andthe vertical), and k,A, f are called control parameters. The dynamical variable depends on timewhile the control parameters are fixed, that is, they do not vary in time.
26

Discrete dynamical systems
Here a physical system is reduced to a set of measurements taken at certain time intervals, e.g.temperature, pressure, etc are systems whose values are usually given at fixed time intervals andat fixed points.
These systems are defined by maps:x→ F(x),
and difference equations:xn+1 = M(xn).
This last equation is sometimes called the equation of motion of the dynamical system.
2.1 First-order continuous dynamical systems
First-order systems are of the form
dxdt
= f (x) or x = f (x), x ∈ R, f : R ∈ R,
where there is only one dependent (and one independent) variable defining the system. Typical examplesinclude the following population growth models;
• The exponential population growth model
dNdt
= rN,
where N is the population at time t and r is the growth rate parameter. This equation has thesolution
N(t) = N0ert ,
where N0 is the population at time t = t0.
What happens to this population?
• The logistic growth
dNdt
= rN(
1− Nk
),
where N(t) is the population at time t, and r and k are positive constants. (NB. In reality both rand k could be functions of t).
27

• The Gompertz equation
dNdt
= r0e−αtN.
• Logistic with Allee effect
dNdt
= rN(
1− Nk
)(Nk0−1).
2.2 Autonomous and non-autonomous systems
Consider the following ordinary differential equations:
x = 2x where x =dxdt
, (2.1)
x = 2xt (2.2)
Equation (2.1) does not depend explicitly on t, that is, there is no t on the right-hand side of the equation!Such equations are said to be AUTONOMOUS. On the other hand, equation (2.2) is multiplied by t on theright hand side. It is NON-AUTONOMOUS.
NB: Any non-autonomous system can always be converted into a system of autonomous equations bytreating the time t as an unknown variable. We shall see show this is done shortly.
2.2.1 A higher order equation as a System of first order equations
Higher order ode’s can be written as a system of first order equations. As an example, consider thesecond order equation of the damped harmonic oscillator:
mx+bx+ kx = 0,
where m is the mass, b the damping and k the stiffness of the system. Write this equation as a system oftwo first order equations:
Solution: Let x1 = x and x2 = x⇒ x = x2 to get:
x1 = x2
x2 = − kmx1− b
mx2
2 linear equations (2.3)
28

The two first order equations (2.3) can be written in matrix form x = Ax;
x =
0 1
− km − b
m
x where x =
(x1x2
). (2.4)
Using equation (2.4) as an example, we note that the general form of a system of linear equations is;
x = Ax+ c,
where x ∈ Rn, A ∈ Rn×n (a matrix) and c ∈ Rn (a“constant” vector). We note the following:
• If c≡ 0 the system is homogeneous
• If A and c are both independent of t, then the system is autonomous
• If A or c are functions of t then the system is nonautonomous
Example 1 Convert the one-dimensional non-autonomous equation of the forced damped oscillator;
mx+bx+ kx = F cos t,
to an autonomous system of first order equations.
SOLUTION: Proceed in two steps as follows:
1. STEP 1: Convert the system into a 2-dimensional non-autonomous system. Let x1 = x and x2 =x⇒ x = x1. The system now becomes;
x1 = x2
x2 = − kmx1− b
mx2 +Fm cos t
⇒ ddt
(x1x2
)=
0 1
− km − b
m
( x1x2
)+
0
Fm cos t
2. STEP 2: Now let x3 = t⇒ x3 = 1. The system now becomes three-dimensional;
x1 = x2
x2 = − kmx1− b
mx2 +Fm cosx3
x3 = 1
⇒ddt
x1x2x3
=
0 1 0
− km − b
m 0
0 0 0
x1
x2x3
+
0
Fm cosx3
1
29

2.3 Equilibrium, fixed points or steady states
Consider the one-dimensional equation
dxdt
= f (x). (2.5)
Definition 6 (Equilibrium Points) The equilibrium points of equation (2.5) are all values of x for which
f (x) = 0.
Example 2 Find the equilibrium points of the logistic equation
dxdt
= λx(k− x),
where λ and k are positive constants.
SOLUTION: The equilibrium points are obtained by setting
dxdt
= 0 ⇒ λx(k− x) = 0
⇒ x(t) = 0 and x(t) = k.
The equilibrium or fixed points x = 0 and x = k are fixed for all time, but there may be other solutionssuch that f (x) = 0. How can we find the long term behaviour of these other (unknown) solutions?
First we note that the fixed points x(t) = 0 and x(t) = k divides the real number line into three intervals;see Figure 2.2. Now let us consider what happens in each of the three regions.
-�x = 0 x = k
x < 0 x0 < x < k x > k
Figure 2.2: The three subintervals of the number line and the equilibrium points of the logistic equation
• Region 1: x < 0. Notice that in this region f (x) = λx(k− x)< 0 which means that;
dxdt
< 0
30

⇒ is a steadily decreasing function of t ∀ x < 0
We indicate the fact that x is decreasing for x < 0 by an arrow pointing to the left of 0 on the x-axis,see Fig. 2.3
x = 0 x = k
x < 0 0 < x < k x > k
�
Figure 2.3: We indicate the fact that x is decreasing for x < 0 by an arrow pointing to the left of 0 on thex-axis
IMPLICATION: The implication of the above result is that a solution of the logistic equation withan initial condition near x = 0 but to the left of 0 will decrease with time (i.e. move away towardsx→−∞ as t = ∞).
• Region 2: 0 < x < k. In this region f (x) = λx(k− x)> 0 which means that;
dxdt
> 0
⇒ is a strictly increasing function of t ∀ 0 < x < k
We indicate this fact by an arrow pointing to the right between 0 and k , see Fig. 2.4.
x = 0 x = k
x < 0 0 < x < k x > k
-�
Figure 2.4: We indicate the fact that x is increasing in 0 < x < k by an arrow pointing to the right of 0 onthe x-axis
IMPLICATION: A solution of the logistic equation with an initial condition x(0) lying between 0and x will increase monotonically with t and converge k k as t = ∞.
• Region 3: x > k. In this region f (x) = λx(k− x)< 0 which means that;
dxdt
< 0
⇒ is a strictly decreasing function of t ∀ x > k
We indicate this fact by an arrow pointing to the left in the region x > k , see Fig. 2.5.
IMPLICATION: A solution of the logistic equation with initial condition x(0) > k will decreasemonotonically with t and converge at k as t = ∞).
31

x = 0 x = k
x < 0 0 < x < k x > k
� - �
Figure 2.5: We indicate the fact that x is decreasing for x > k by an arrow pointing to the left in the regionx > k.
• Fig. 2.5 is called the Phase Portrait of the logistic equation:dxdt
= λx(k− x) for all λ,k > 0.
• The fixed point x = 0 in (Fig. 2.5) is called a REPELLER. This fixed point is unstable.
• The fixed point x = k is called an ATTRACTOR. This fixed point is stable.
EXERCISE. Consider the one-dimensional system:
dxdt
= x− x3.
Find the equilibrium points and classify these equilibrium points as repellers or attractors. Sketch thephase portrait.
2.4 Stability of fixed points
Consider the equationdxdt
= f (x) with a fixed point x = x∗ so that f (x∗) = 0.
Definition 7 (Stable Equilibrium) The fixed point x∗ is asymptotically stable (or just stable) if valuesof x near the fixed point move closer to the fixed point with time.
Mathematically; the fixed point x∗ is stable if
∃ δ > 0 such that ∀ x0 with |x0− x∗|< δ⇒ limt→∞|x(t)− x0|= 0.
Attractors are examples of stable equilibrium points.
Definition 8 (Unstable equilibrium point) An equilibrium point x∗ is unstable if values of x startingnear x∗ move away from x∗ with time.
Repellers are examples of unstable equilibrium points.
32

2.4.1 Derivative test for stability
We have seen that we can use the phase portrait to deduce whether an equilibrium point is stable orunstable, alternatively, we can use the derivative test for stability.
Definition 9 (Derivative Test for Stability) Given the differential equation
dxdt
= f (x),
suppose that f (x) and f ′(x) are continuous and that f (x∗) = 0 (where x∗ is an equilibrium point). Iff ′(x∗) 6= 0 then:
1. If f ′(x∗)< 0 then x∗ is an attractor (a stable equilibrium point).
2. If f ′(x∗)> 0 then x∗ is a repeller (an unstable equilibrium point).
3. If f ′(x∗) = 0 then the stability test is inconclusive.
Proof of the derivative test for stability
See class lectures.
EXERCISE:
1. Using the derivative test for stability, classify the equilibrium points for the equation
dxdt
= x(1− x2).
2. Find the fixed points and classify them. Give the phase portraits and solution curves;
(a) x = x2−1
(b) x = x− cosx
Disadvantages of phase portraits
• They are only useful for autonomous equations• They give no information about the rate of change of solutions.
33

2.5 The Potential
The potential (or potential energy) of a system is denoted by V (x) where
dxdt
= f (x) =−dVdx
.
We know from physics that a system always moves in such a way as to reduce its potential. The impli-cation of this is that a stable equilibrium is attained when the potential is a minimum. This fact is easyto prove; note that
dVdt
=dVdx
dxdt
using the chain rule
=dVdx
(−dV
dx
)=−
(dVdx
)2
≤ 0, using the definition of the potential. (2.6)
The implication of the statement(
dVdx
)2
≤ 0 is that V (x) decreases monotonically with the flow. In
other words, the system always moves towards a lower potential.
Theorem 1 The local minima of V (x) corresponds to stable fixed points and the local maxima corre-spond to unstable fixed points.
We will not give a direct proof of this theorem. We shall do the following examples (in class) to showthat this is true.
EXERCISE:
1. Graph the potential for the system x =−x and identify all the equilibrium points.
2. Find and graph the potential for the system x = x− x3and classify the equilibrium points.
3. Plot the potential function V (x) and identify all the equilibrium points and their stability.
(a) x = x(1− x)
(b) x = r+ x− x3 for different values of r.
34

2.6 Phase Portrait
What do we mean by a phase portrait?
Definition 10 (Phase portrait) This is the set of all qualitatively different trajectories x(t). Phase linesare only useful for autonomous systems.
2.7 Bifurcations of equilibria
This is a qualitative change in the character (or behaviour) of solutions of a nonlinear system as a param-eter is varied. By varying a parameter, we can talk of
2.7.1 Saddle-node bifurcation
This type of bifurcation results in the “creation and destruction” of fixed points (meaning that new fixedpoints appear and disappear as one varies a certain parameter)
Saddle-Node Bifurcations is also known as;
• Turning point bifurcation
• Fold Bifurcation
• “Blue sky” bifurcation (the inventors of this name thought the bifurcation just appeared fromnowhere!)
Saddle-Node Bifurcation is best portrayed by the differential equations;
x = r+ x2 (2.7)x = r− x2 (2.8)
where r is a parameter that can be positive, zero or negative.
The above equations are called the normal or generic form of Saddle-Node bifurcation.
NB. The two equations above are equivalent under the change of variables;
x→−x and r→−r.
35

2.7.2 Transcritical bifurcation
Transcritical bifurcation is characterized by a change in the stability of the fixed points.
The generic (or normal form) equation for transcritical bifurcation is
x = rx− x2. (2.9)
A typical example is the logistic equation
N = rN(
1− NK
).
For transcritical bifurcation, a fixed point may exists for all the values of the parameter r but there is achange of stability (i.e., the fixed point may go from being stable to being unstable, or the other wayround).
Example 3 Analyze the dynamics ofx = r lnx+ x−1,
near x = 1 and show that the system undergoes a transcritical bifurcation at a certain value of r.
2.7.3 Pitchfork bifurcation
This is bifurcation in the presence of symmetry e.g. consider an upright beam buckling under a load, itcan either go left or right. And if there is an equilibrium point on the left there will be a correspondingequilibrium point on the right. Pitchfork bifurcation has two sub-categories shown below;
Pitchfork Bifurcation
Supercritical Subcriticalpitchfork bifurcation pitchfork bifurcation
? ?
Normal Form Normal Form
x = rx− x3 x = rx+ x3
36

2.8 Flow on a circle
One-dimensional flow on a line x= f (x) is non-reversible, a particle always moves monotonically eithertowards a fixed point or towards ±∞. Flow on a circle is still one-dimensional except that by movingalong a circle, a particle may eventually return to its starting point. We say that the solutions are periodic.
The generic (or standard) form of a vector field on a circle is
θ = f (θ),
where θ is a point on the circle and θ is the uniquely defined velocity vector at that point. Here f is2π-periodic with f (θ+2π) = f (θ).
Example 4 Consider the one-dimensional system x = sinx. Plot the phase portrait if the system isconsidered as flow on a line.
2.9 Oscillations
For one-dimensional flow on a line, x = f (x), the direction of the flow never reverses. Trajectories mustincrease or decrease monotonically or stay constant. The only possibilities are that:• the trajectory approaches a fixed point as t→ ∞
• the trajectory diverges to ±∞
For flow on a circle, periodic or oscillatory solutions are possible.
37

FIRST-ORDER SYSTEMS: FIXED POINTS AND PHASE PORTRAITS WORKSHEET 1 TUTORIAL
PROBLEMS
1. Convert the second order equations to a system of autonomous first order equations and write theseequations in matrix form (provide also the appropriate boundary conditions);
(a) x = x2 +(1+ εcos t)x, x(0) = 1, x(0) = 0
(b) x+ εx+ x = gsin t,
(c) xx− tx+ ε = 0, x(0) = 1, x(0) = 0
2. In the following exercises, (i) find all the fixed points and determine their stability, (ii) sketch thephase portrait and (iii) discuss the long-term behaviour of all solutions.
(a)dxdt
= (x−1)(x+2),
(b)dxdt
= (x−1)(x+2)(x+3),
(c)dxdt
= (x−1)2(x+2),
(d)dxdt
=(3− x)(1+ x)
x2− x+2,
(e)dxdt
= (x2−9)(sinx−2)
3. Determine whether the given equilibrium point is an attractor or a repeller
(a)dxdt
= 2x7−3x6 + x5−2x+1, x∗ = 0.5.
(b)dxdt
= xe−x + sinx, x∗ = 0.
4. Find the fixed points and determine their stability forddt
x(t) = cosx− ex.
38

NB. Plot the curves of cosx and ex separately. The fixed points are the intersections of these twocurves. Find at least the first 3 or 4.
5. A population subjected to harvesting (with a constant harvesting effort, h(x) = ex) can be modelledby the equation
dxdt
= r0
(1− x
k
)x− ex,
where r0 and k are strictly positive and e is non-negative.
(a) Sketch graphs of the right hand side as a function of x in the cases e < r0 and e > r0.
(b) Sketch a graph of the equilibrium points as functions of e (these are called bifurcation di-agrams). Indicate on your diagram which equilibrium points are asymptotically stable andwhich are unstable.
6. (a) For which values of a does the equation θ = sin(aθ) give a well- defined vector field on thecircle?
(b) Find and classify all the fixed points of θ = sin2θ and sketch the phase portrait on the circle.
2.10 Discrete dynamical systems
One-dimensional maps of the formxn+1 = f (xn),
arise as;
1. in discretisation of continuous systems, for example, in
• iterative methods for solving linear and nonlinear equations, e.g. Newton-Raphson, etc,
• numerical integration of differential equations, e.g. Euler and Runge-Kutta methods
2. models of natural phenomena,
3. simple mathematical models of chaotic behaviour
Here is a formal definition2
Definition 11 Suppose g⊂ RN where N ∈ N. Let xn ∈ g and n ∈ Z. Then the map
f : g→ g where xn+1 = f (xn)
is called a discrete map.2Introduction to Dynamical Systems, Lecture Notes for MAS424/MTHM021 (Version 1.2, 18/04/2008), Rainer Klages
39

Note that xn+1 = f (xn) is the equation of motion of the dynamical system. Given initial condition x0 theequation determines the outcome after n discrete time steps as follows:
x1 = f (x0) = f 1(x0),x2 = f (x1) = f ( f (x0)) = f 2(x0)
......
xn = f n(x0) = f ◦ f ◦ f · · · f (x0)︸ ︷︷ ︸n-fold composed map
Consider the logistic map
xn+1 = rxn(1− xn) = f (xn) where 0≤ xn ≤ 1,0 < r ≤ 4.
To get information about the long term behaviour of this map (given an initial condition x0), we look forall iterates {x0,x1,x2, . . . ,xn}, which define the trajectory or orbit of f (x0) using cobwebs.
2.11 Fixed points and stability
Definition 12 Given a map xn+1 = f (xn), a point x∗ is a fixed point if
Note 2.11.1f (x∗) = x∗.
Example 5 Find the fixed points of xn+1 = f (xn) where f (x) = x2.
The fixed points satisfy: x∗2 = x∗ ⇒ x∗(x∗−1) = 0. Hence x∗ = 0 and x∗ = 1.
Note 2.11.1 NB. Take special note of the difference in the manner in which the fixed points are calculatedwhen compared with continuous time dynamical systems
2.11.1 Stability analysis
Suppose that x∗ is a fixed point of xn+1 = f (xn), and consider a small perturbation of x∗: ηn = xn− x∗.Then (by Taylor’s theorem);
xn+1 = f (xn) = f (x∗+ηn)
= f (x∗)+ f ′(x∗)ηn +12!
f ′′(x∗)η2n + · · ·
40

= x∗+ f ′(x∗)ηn +12!
f ′′(x∗)η2n + · · ·
Note that xn+1 = x∗+ηn+1. Hence
x∗+ηn+1 = x∗+ f ′(x∗)ηn +12!
f ′′(x∗)η2n + · · · .
Clearly, the linearized map near x∗ is
Note 2.11.2ηn+1 ≈ f ′(x∗)ηn. (2.10)
We call λ = f ′(x∗) a multiplier or eigenvalue. From equation (2.10) we get the following results;
η1 = f ′(x∗)η0 = λη0η2 = λη1 = λ
2η0
η3 = λη2 = λ3η0
... =...
ηn = ληn−1 = λnη0
Now, if λ > 1, then λn→ ∞ as n→ ∞. On the other hand, if λ < 1, then λn→ 0 as n→ ∞. Hence weconclude as follows:
The fixed point x∗ is
1. linearly stable if: |λ|= | f ′(x∗)|< 1 (in this case xn→ x∗ as n→ ∞.
• If 0 < λ < 1, then ηn+1 has the same sign as ηn and convergence is monotonic.
• If −1 < λ < 0, the iterates or trajectories oscillate about x∗.
2. unstable if: |λ|= | f ′(x∗)|> 1
• If λ > 1, then we have monotonic growth.
• If λ <−1, we have oscillatory instability.
3. marginally stable if: Linearly stable if: |λ| = | f ′(x∗)| = 1 (NB. you need a cobweb diagram toprove stability)
4. superstable if: |λ|= | f ′(x∗)|= 0 (here we have quadratic convergence with ηn+1 ≈ η2).
41

2.12 Graph of a function
The goal of this section is to understand the behaviour of the orbits of a given map without having tocompute the orbits, but simply by looking at the graph of the function f (x). To plot the graph of afunction in Matlab, we can use the command ’fplot’. For instance, to plot the function
f (x) = 2.5x(1− x)
in the range of x values from 0 to 1, we may type
>> fplot(′2.5∗ x∗ (1− x)′, [0 1],′ r−′);(The string ’r−’ specifies that the graph should be a red line, the default is a blue line).
Alternatively, we can plot the function using ’plot’ command: first specify the range of x values:
>> x = 0 : 0.01 : 1;
Next, compute the values of the function and plot the result:
>> f = 2.5.∗ x.∗ (1− x);>> plot(x, f ,′ r−′);(Note that we use ’.*’ for multiplication instead of just ’*’. The reason is that ’*’ is interpreted by Matlabas a vector multiplication. The ’.*’ symbol tells Matlab to multiply vectors element by element.)
2.13 The cobweb diagram
There is a simple geometric procedure for describing the behaviour of orbits using only the graph off (x). It is sometimes referred to as the cobweb diagram. Let’s say we want to show on the functiongraph an orbit starting from x0. To help us do that, we first draw the diagonal line y = x, which makes a45◦ angle with the x- and y-axes.
>> hold on; plot([0 1], [0 1],′ k−′);(The command ’hold on’ holds the current plot of the function, so that the black line from (0,0) to (1,1)is added to it).
The next point on the orbit is the number f (x0). The graph y = f (x) allows us to read off this point, since(x0, f (x0)) is the point on the function graph directly over x0.
>> x0 = 0.1;>> x = x0; f = 2.5.*x.*(1-x);>> plot([x x], [x f]);
42

Next, we need to assign the number f (x0) to the next value of x:
x1 = f (x0).
In order to do it on the graph, we draw a horizontal line from the point (x0, f (x0)) till it meets thediagonal line x = y precisely at the point ( f (x0), f (x0)) .
>> plot([x f ], [ f f ]);
We can continue graphing the orbit by assigning the value of f to x:
>> x = f ; f = 2.5.∗ x.∗ (1− x);
and repeating the above steps again. All this can be arranged in a loop and written as a Matlab program.As before, copy the program into a file and run it in Matlab. Explore different values of r, N and x0.
Program 2
% Plotting the graph of the function and the diagonalr = 2.5; N = 10; x0 = 0.1; x = 0:0.01:1; f = r.*x.*(1-x); clf;plot(x,f,’r-’,[0 1],[0 1],’k-’); hold on;% Plotting the ’cobweb’ diagramf = x0; for i = 1:N,
x = f;f = r.*x.*(1-x);plot([x x], [x f]);pause;plot([x f], [f f]);pause;
end,
NB.
• Plotting the function and the diagonal in line 5 is combined into one ‘plot’ command.
• A ‘pause’ command is used to monitor the execution of the loop. Press any key to advance throughthe loop and watch the progress of plotting the cobweb diagram.
If you want to see the end result right away, remove the pause commands from the program. In thediagram, each successive point of the orbit appears on the diagonal y = x after one ‘reflection’ off of thefunction graph.
Example: Modify the above program to produce the cobweb diagrams for the following maps:
1. xn+1 = x2n− c; c = 0.6; x0 = 0, in the range [−1 1];
2. xn+1 = asin(xn); a = 2.0; x0 = 0.1; in the range [0 π];
43

2.14 Calculating the Liapunov exponent
A defining characteristic of a chaotic orbit is that it displays exponentially sensitive dependence on initialconditions.
Consider the mapxn+1 = f (xn). (2.11)
For a chaotic system, two orbits x1 and x2 originating from very close initial conditions (such as x1(0) =0.3 and x2(0) = 0.300000001), the orbits initially stay close to one another for a number of iterates, buteventually drift apart. The separation grows exponentially fast with the number of iterates (observe thisby plotting the natural logarithm of the separation between the orbits (that is, log(abs(x2− x1))) versusthe number of iterates.This quantity grows approximately linearly until it reaches a plateau. In the lineargrowth region
log |x2− x1| ≈ a+λn,
where a is the logarithm of the initial separation between the orbits and n is the number of iterates.Alternatively, this may be written as
|x2− x1| ≈ Aexp(λn) where A = exp(a),
which shows that the separation indeed grows exponentially with n. The coefficient λ is called theLyapunov exponent of the dynamical system. The Lyapunov exponent characterizes the rate at whichnearby trajectories diverge away from each other.
For the map (2.11), consider two orbits starting at x0 and x0+δ0 , where δ0 is infinitesimally small. Thenext points of the two orbits are
x1 = f (x0), (2.12)x1 +δ1 = f (x0 +δ0). (2.13)
Note that, since δ0 is very small, we can use the Taylor series for f (x0 + δ0) at x0 to write the lastequation
x1 +δ1 = f (x0)+ f ′(x0)δ0 ⇒ δ1 = f ′(x0)δ0,
where f ′(x0) is the derivative of f evaluated at x0.
Similarly, for the nth points along the orbits, xn = f (xn−1), xn +δn = f (xn−1 +δn−1), so that
δn = f ′(xn−1)δn−1. (2.14)
Equation (2.14) is useful in deriving a formula for computing the Lyapunov exponent of the map f (x).First, note that the logarithm of the separation between the two orbits starting at x0 and x0+δ0 changesapproximately linearly with n, that is,
log |δn| ≈ log |δ0|+λn,
44

where λ is the Lyapunov exponent. Hence we can estimate the exponent as
λ =1n
log |δn/δ0|,
for some large n. Now, we use equation (2.14) to rewrite the ratio δn/δ0 as
δn
δ0= (δn/δn−1)(δn−1/δn−2) . . .(δ2/δ1)(δ1/δ0) = f ′(xn−1) f ′(xn−2) . . . f ′(x1) f ′(x0).
Finally, the formula for computing the Lyapunov exponent is given by
λ =1n
{log | f ′(xn−1)|+ log | f ′(xn−2)|+ . . .+ log | f ′(x1)|+ log | f ′(x0)|
}= lim
n→∞
1n
n−1
∑i=0
log | f ′(xi)|,
where λ depends on x0.
For chaotic orbits λ > 0, the Lyapunov exponent is positive, because the separation increases. However,if we consider parameter values where the orbits converge to a fixed point or a periodic orbit, then theseparation between the orbits will decrease. The rate of decrease will also be exponential.
(a) STABLE FIXED POINTS AND CYCLES: These exist when the Liapunov exponent λ is negative, (i.e.λ < 0).
(b) CHAOTIC ORBITS: λ > 0.
EXAMPLE: Consider the tent map:
f (x) ={
rx 0≤ x≤ 12
r(1− x) 12 < x≤ 1,
(2.15)
so | f ′(x)|= r for all x ∈ [0,1]. The fixed points are stable for r < 1 and unstable for r > 1. The Liapunovexponent is:
λ = limn→∞
1n
n−1
∑i=0
ln | f ′(xi)|
45

= limn→∞
1n
n−1
∑i=0
lnr = lnr.
The Liapunov exponent is independent of the initial conditions x0. The tent map has chaotic solutionsfor r > 1.
◦◦o 0 o◦◦
2.15 Bifurcation diagrams
The behaviour of a dynamical system can change quite dramatically with the change of system param-eters. These changes are not only quantitative, such as, for example, change in the location of a fixedpoint, but also qualitative: fixed points can be created or destroyed, their stability can change, the systembehaviour can change from regular (stationary or periodic) to irregular - chaotic. It is the qualitativechanges in the system dynamics that are the subject of investigation in the theory of dynamical systems.
Definition 13 Qualitative changes in the system dynamics are called bifurcations, and the parametervalues at which they occur are called bifurcation points.
Consider the so-called logistic map:xn+1 = rxn(1− xn).
For the values of parameter r just below 3.0 the orbits converge to a stable fixed point. When the valueof r exceeds 3.0, the fixed point becomes unstable, and the orbits converge to a stable period-2 orbit,which is created at r = 3.0. Therefore, we say that r = 3.0 is a bifurcation point of the logistic map. Thebifurcation that occurs at r = 3.0 is called a period-doubling bifurcation, which is one of many types ofbifurcations that can occur in dynamical systems. One of the goals of the dynamical systems theory is toclassify different types of bifurcations and investigate their properties.
2.15.1 Constructing bifurcation diagrams
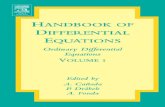
In order to study bifurcations in dynamical systems, it is convenient to visualize the bifurcations thathappen at different parameter values. A good way to see the general behaviour of the system at differentparameter values is to plot the orbits as a function of the parameter. That is, we will plot the orbit pointsxn along the vertical axis against the values of parameter r along the horizontal axis. Such a plot iscalled a bifurcation diagram.
Below is a Matlab script file that constructs a bifurcation diagram (see Figure 2.6) for the logistic mapwith parameter r in the range from 2.5 to 4.
Npre = 200; Nplot = 100; x = zeros(Nplot,1); for r = 2.5:0.005:4.0,
46

x(1) = 0.5;for n = 1:Npre,x(1) = r*x(1)*(1 - x(1));
end,for n = 1:Nplot-1,x(n+1) = r*x(n)*(1 - x(n));
end,plot(r*ones(Nplot,1), x, ’.’, ’markersize’, 2);hold on;
end, title(’Bifurcation diagram of the logistic map’); xlabel(’r’);ylabel(’x_n’); set(gca, ’xlim’, [2.5 4.0]); hold off;
2.5 3 3.5 40
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1Bifurcation diagram of the logistic map
r
xn
Figure 2.6: Bifurcation diagram of the logistic map
2.16 Brief Summary
1. FIXED POINTS AND STABILITY: Given the map xn+1 = f (xn);
(a) The point x∗ is a fixed point of the map if f (x∗) = x∗.
(b) Linearized stability: ηn+1 = f ′(x∗)ηn where λ = f ′(x∗) is called a multiplier or eigenvalue.The fixed point x∗ is;
(i) Linearly stable: if |λ|= | f ′(x∗)|< 1, meaning the iterates converge.(ii) Unstable: if |λ|= | f ′(x∗)|> 1, so the solution diverges.(iii) Marginal case: if |λ| = | f ′(x∗)| = 1, a cobweb diagram would be your best bet in de-
ciding the stability.(iv) SUPERSTABLE: if |λ|= | f ′(x∗)|= 0, meaning convergence is quadratic.
2. Existence of a 2-cycle: A 2-cycle exists if and only if there exists two points p and q such that
f (p) = q and f (q) = p.
47

Equivalently, the p must satisfyf ( f (p)) = f 2(p) = p.
For the logistic map, xn+1 = f (xn) = rxn(1− xn). Then f (x) = rx(1− x) and
p,q =r+1±
√(r−3)(r+1)2r
,
which are real for r > 3. Thus a 2-cycle exits for r > 3.
3. ANALYZING THE STABILITY OF A CYCLE: The 2-cycle is stable if p and q are stable fixed pointsfor f 2. Hence the 2-cycle is stable if |λ|< 1 where;
λ =ddx
[ f ( f (x))]x=p = f ′( f (p)) f ′(p) = f ′(q) f ′(p).
2.17 Exercises: One-dimensional maps
1. FIXED POINTS AND COBWEBS: Find the fixed points and decide whether they are stable or not(in addition to the mathematically argument, use a cobweb also).
(i) xn+1 =√
xn,
(ii) xn+1 = x3n.
(iii) xn+1 = lnxn.
2. Consider the map xn+1 = 3xn− x3n.
(i) Find all the fixed points and classify their stability.
(ii) Draw a cobweb starting at x0 = 1.9 and another starting at 2.1. Try to explain the dramaticdifferences between the two orbits.
3. Suppose you want to find the roots of an equation g(x) = 0. Then Newton’s method says you shouldconsider the map xn+1 = f (xn) where
f (xn) = xn−g(xn)
g′(xn).
(a) Write down the “Newton Map” xn+1 = f (xn) for the equation g(x) = x2−4 = 0.
48

(b) Show that the Newton map has fixed points at x∗ =±2.
(c) Show that the fixed points are superstable. Show that the modified Newton method convergesquadratically!]
4. LOGISTIC MAP:
(a) Find the value of r at which the logistic map has a superstable fixed point.
(b) Let p and q be points in a 2-cycle for the logistic map.
(i) Show that if the cycle is superstable, then either p =12
or q =12
. (In other words, the
point where the map takes on its maximum must be one of the points in the 2-cycle.(ii) Find the value of r at which the logistic map has a superstable 2-cycle.
5. Given the quadratic map xn+1 = f (xn) = r− x2n, where r and x can take on any real values,
(a) Find all the fixed points as a function of r.
(b) Find any values of r at which the fixed points bifurcate and classify those bifurcations.
(c) For which values of r is the 2-cycle superstable?
(d) For which values of r is there a stable 2-cycle?
6. Consider the cubic map xn+1 = f (xn) = rxn− x3n.
(a) Find the fixed points. For which values of r do they exists? And stable?
(b) To find the 2-cycles of the map, suppose that f (p) = q and f (q) = p. Show that p,q are rootsof the equation x(x2−r+1)(x2−r−1)(x4−rx2+1) = 0 and use this to find all the 2-cycles.
7. Calculate the Liapunov exponent for the linear map xn+1 = rxn.
49

Chapter 3
Second-order linear systems
The equation
ddt
(xy
)= A
(xy
)+F(t) where
(xy
)∈ R2, F ∈ R2,
and A is an n×n matrix with constant entries is homogeneous if F(t)≡ 0, and inhomogeneous otherwise.Hence homogeneous second order linear systems are systems of the form
x = f1(x,y) = ax+byy = f2(x,y) = cx+dy. (3.1)
In matrix form
x = Ax where A =
(a bc d
)and x =
(xy
)∈ R2.
The basic aim of this chapter is to discuss the long-term behaviour of x ∈ R2.
Expected Learning Outcomes
My expectations are that when we are done with this chapter, you should be able to:
• Calculate fixed points for two-dimensional linear systems,
• Classify the fixed points (that is, distinguish between saddle points, nodes, spirals and centers).
• Establish the stability of fixed points including distinguishing between:
1. Asymptotic stability,
50

2. Neutral stability,
3. Liapunov stability.
• Construct phase portraits for a given linear planar system.
3.1 Fixed points
Definition 14 (Fixed point) A point x∗ = (x∗,y∗) is a fixed point of x = f (x) if f (x) = 0.
To find the fixed points of a two-dimensional system solve simultaneously the equations
x = f (x,y) = 0y = g(x,y) = 0
for x∗ and y∗.
Definition 15 (Isolated fixed point) The fixed point x∗ is an isolated fixed point if there is some (small)neighbourhood of x∗ that contains no other fixed point
The stability of the fixed points is determined by the sign of the eigenvalues λ1 and λ2 of the matrix A.
Theorem 2 (Stability of a homogeneous system) A homogeneous linear system x = Ax is stable if andonly if all the eigenvalues of A have strictly negative real parts.
Recall that the eigenvalues of A are the roots of the characteristic polynomial
P(λ) = det(λI−A),
where I is the identity matrix.
3.1.1 Classification of fixed points
Given the 2×2 matrix
A =
(a bc d
),
we define the trace of the matrix tr(A)= τ= a+d and the determinant by ∆= ad−bc. The characteristicpolynomial is
P(λ) = λ2− τλ+∆ = 0.
51

Hence the eigenvalues are obtained from the formulas (compare with lecture notes):
λ1,2 =τ±√
τ2−4∆
2, ∆ = λ1λ2, τ = λ1 +λ2,
where λ1,2 are eigenvalues of the matrix A.
The second and third equations are obtained by writing the characteristic equation in the form (factor-izing):
(λ−λ1)(λ−λ2) = λ2− τλ+∆ = 0.
3.2 Eigenvalues of higher order matrices
We have already seen that the eigenvalues of a matrix A are the roots of the characteristic polynomial
P(λ) = det(λI−A) = 0.
Solving the equation P(λ) = 0 is non-trivial for 3×3 matrices or higher dimensions. A possible way tofind the eigenvalues is to note the following;
1. A general polynomial P(λ) can be represented in the form
P(λ) = λn +an−1λ
n−1 + . . .+a1λ+a0. (3.2)
2. If the n roots of P(λ) are λ1,λ2, · · · ,λn, then P(λ) can also be written in the form
P(λ) = (λ−λ1)(λ−λ2) . . .(λ−λn). (3.3)
Expanding equation (3.3) and equation coefficients of like powers of λ in equations (3.2) and (3.3) givesthe following relationships between the coefficients a j and the roots λ j;
an−1 = −∑i
λi
an−2 = ∑i< j
λiλ j
an−3 = − ∑i< j<k
λiλ jλk
...
52

a0 = (−1)nλ1λ2 · · ·λn.
Now, the important results to note are the following;
a0 = P(0) = (−)ndet(A),an−1 = −tr(A),
where tr(A) is the sum of the diagonal elements of A.
NB. If all the eigenvalues λ1,λ2, · · · ,λn of A have strictly negative real parts, then
an−1 = −tr(A) =−(λ1 +λ2 + · · ·+λn)> 0,a0 = (−1)ndet(A) = (−1)n
λ1λ2 · · ·λn > 0.
Hence the proposition;
Proposition 1 If all the eigenvalues of A have strictly negative real parts, then all the coefficients of itscharacteristic polynomial are strictly positive.
Exercise 1 Use the ideas outlined above to find the eigenvalues of the matrix
A =
5 3 10 4 20 0 4
.
Note that here that λ1 = 5 and λ2 = λ3 = 4 (obviously!).
A further note from the above results is that the product of all the roots of the polynomial
P(λ) = λn +an−1λ
n−1 + . . .+a1λ+a0,
is (−1)na0, that is a0 = (−1)nλ1λ2 · · ·λn. Consequently, as possible rational roots of P(λ), one needonly try the integer factors of a0.
Example 6 Find the eigenvalues of the matrix
A =
1 2 −11 0 14 −4 5
.
53

The characteristic polynomial is
P(λ) = det(λI−A) =
∣∣∣∣∣∣λ−1 2 −1
1 λ−0 14 −4 λ−5
∣∣∣∣∣∣= λ3−6λ
2 +11λ−6.
To find the roots of P(λ) we try the integer factors of a0 = −6, namely ±1,±2,±3 and ±6. SinceP(1) = 0, then λ = 1 is a root of P(λ) = λ3−6λ2 +11λ−6.
Hence (λ−1) is a factor of P(λ). Dividing P(λ) by (λ−1) gives
P(λ) = (λ−1)(λ2−5λ+6 = (λ−1)(λ−2)(λ−3).
3.2.1 Routh-Hurwitz criteria
The Routh-Hurwitz criteria provides necessary and sufficient conditions for the stability of higher ordersystems (n≥ 3).
Given any polynomial P(λ) = λn +an−1λn−1 + . . .+a1λ+a0, define the matrices
M1 = (an−1), M2 =
(an−1 an−3
1 an−2
), M3 =
an−1 an−3 an−51 an−2 an−40 an−1 an−3
M4 =
an−1 an−3 an−5 an−7
1 an−2 an−4 an−60 an−1 an−3 an−50 1 an−2 an−4
, · · · ,Mn =
an−1 an−3 an−5 · · · a−n+11 an−2 an−4 · · · a−n+20 an−1 an−3 · · · a−n+30 1 an−2 · · · a−n+40 0 an−1 · · · a−n+5
...0 0 0 · · · a−10 0 0 · · · a0
where a j is defined to be zero if j < 0.
Theorem 3 (Routh-Hurwitz criteria) The roots of the polynomial P(λ) all have strictly negative realparts if and only if det(Mk)> 0 for all k.
Note 3.2.1 Exercise 2 1. Show that the above conditions reduce to;
54

• a1 > 0 and a0 > 0 when n = 2.
• a2 > 0, a0 > 0 and a1a2−a0 > 4 when n = 3.
2. For each of the following matrices A, determine if the system x = Ax is stable or not.
(i)(
3 10 −2
)(ii)
(−2 1
7 −3
)(iii)
−1 1 74 −1 −80 0 1
(iv)
1 1 5−4 0 2−6 2 0
(vi)
−1 1 2 −3
0 −2 −4 00 0 0 −50 0 0 −1
(vii)
−1 1 2 −3−4 3 −4 0
8 0 0 −5−2 7 0 −1
(vii)
2 0 0 −32 −2 −4 23 1 0 −50 0 0 −1
3.3 Summary - characterization of fixed points
1. SADDLE POINTS: These occur if ∆ < 0. For this case the eigenvalues are real and have oppositesigns.
2. SPIRALS AND CENTERS: These occur when ∆ > 0. With ∆ > 0, eigenvalues are either real withthe same sign (NODES), or complex conjugates (SPIRALS AND CENTERS)
3. NODES: These satisfy τ−4∆ > 0.
4. SPIRALS: These satisfy τ−4∆ < 0.
5. The parabola τ2−4∆ = 0 is the border line between nodes and spirals; star nodes and degeneratenodes live on this parabola.
3.3.1 The stability of nodes and spirals
The stability of nodes and spirals are determined by τ.
1. STABLE FIXED POINT: Stable nodes are obtained when τ < 0. In this case both eigenvalues havenegative real parts and so decay (exponentially) with time.
2. UNSTABLE SPIRALS AND NODES: These occur when τ > 0 leading to exponential growth.
3. NEUTRALLY STABLE CENTERS: These occur when τ = 0, when the eigenvalues are purely imag-inary.
55

If ∆ = 0, at least one of the eigenvalues is zero. Then the origin is not an isolated fixed point. There iseither a whole line of fixed points or a plane of fixed points if A = 0.
3.3.2 Degenerate node
Degenerate nodes are obtained when there is only one eigen direction. The degenerate node is on theborderline between a spiral and a node.
3.4 Solving homogeneous systems
Consider the linear system
x′(t) = ax+by
y′(t) = cx+dy
⇒ ddt
(x(t)y(t)
)=
(a bc d
)(xy
). (3.4)
To find the fixed points, solve simultaneously the equations,
x = 0y = 0 i.e.,
f (x,y) = 0
g(x,y) = 0
The only equilibrium point is the origin (0,0). It is worth noting that (0,0) is the only critical point ifad−bc 6= 0, that is, if the determinant of the coefficient matrix is non-zero.
The system has solutions of the form
x(t) = uert
y(t) = vert . (3.5)
Substituting (3.5) in (3.4) gives
(r−a)u−bv = 0
−c+(r−d)v = 0
⇒(
r−a −b−c r−d
)(uv
)= 0. (3.6)
This has a non-trivial solution if the determinant of the matrix is non-zero, that is
56

∣∣∣∣ r−a −b−c r−d
∣∣∣∣= 0 ⇒ r2− (a+d)r+(ad−bc) = 0. (3.7)
Equation (3.7) is called the characteristic equation for the system above. It has the roots
r1,2 =(a+d)±
√(a+d)2 +4(ad−bc)
2.
The asymptotic (or long-term)behaviour of the solutions to (3.4) depend on the roots r1 and r2, namelywhether the roots are;
1. real, distinct and positive,
2. real, distinct and negative
3. real and of opposite sign,
4. equal,
5. complex.
Case 1: r1, r2 are real, distinct and positive
Consider the simple decoupled system
x(t) = x,
y(t) = 3y
⇒ A =
1 0
0 3
⇒ r2−4r+3 = 0.
This has roots r1 = 1 and r2 = 3 (both real, distinct and positive). This gives the general solution
x(t) = Aet ,
y(t) = Be3t ,
where A and B are constants. The integral or solution curves for this system are a family of curves givenby the equation
y =Cx3,
57

for different values of C obtained by combining the previous two equations or by solving the equation
dydx
=3yx.
NB. When the roots r1, r2 are real, distinct and positive, the fixed point (0,0) is an unstable impropernode. All the trajectories move away from the origin with time.
Case 2: r1, r2 are real, distinct and negative
A single illustrative example is
x(t) =−2x,
y(t) =−y
⇒ A =
−2 0
0 −1
,
which has roots r1 =−2 and r2 =−1 (both real, distinct and negative). This gives the general solution
x(t) = Ae−2t ,
y(t) = Be−t ,
The integral curvesx =
(A/B2)y2 ⇒ x =Cy2.
The origin is asymptotically stable since the trajectories approach this point in the long term. The fixedpoint (0,0) is a stable improper node.
Example 7 Classify the critical point at the origin and sketch a plausible phase portrait of the system
x =−5x+2y,y = x−4y. (3.8)
By setting x = 0 and y = 0, it is clear that the fixed point is (0,0), that is, the origin. The system abovegives the coefficient matrix
A =
−5 2
1 −4
⇒ r2 +9r+18 = 0 : r1 =−6, r2 =−3.
58

Hence the origin is an asymptotically stable node.
To sketch the phase portrait we need to find the transformed axes (two straight lines through the origin).First recall that any straightline through the origin has the equation
y = mx
where m is the gradient. Using the chain rule, re-write the system of equations in the form
dydx
= m =x−4y−5x+2y
.
Substitute y = mx to get
m =x−4mx−5x+2mx
= m =1−4m−5+2m
⇒ m =−12,1.
Hence the transformed axis are
y =−12
x and y = x.
Sketch these on your diagram and show the direction of flow along each line.
Figure 3.1: Case of negative distinct roots
59

Case 3: r1, r2 are real and of opposite sign
A single illustrative example is
x(t) = x,
y(t) =−y
⇒ A =
1 0
0 −1
⇒ r1 = 1, r2 =−1.
In this case the fixed point (0,0) is a saddle point. It is unstable and the solution of the equations is
x(t) = Aet ,
y(t) = Be−t ,
The integral curves
x =Cy.
Example 8 Classify the critical point at the origin and sketch a plausible phase portrait of the system
x = 5x−3y,y = 4x−3y. (3.9)
By setting x = 0 and y = 0, it is clear that the fixed point is (0,0), that is, the origin. The coefficientmatrix leads to the characteristic equation
r2−4r−3 = 0 ⇒ r1 =−1, r2 = 3.
Hence the origin is a saddle point. Re-write the system of equations in the form
dydx
= m =4x−3y5x−3y
,
and substitute y = mx to get the transformed axis
y = 2x and y =23
x.
Sketch these on your diagram and show the direction of flow along each line.
60

Case 4: r1 = r2
A single illustrative example is
x(t) = sx,
y(t) = sy
⇒ A =
s 0
0 s
⇒ r1 = s, r2 = s.
In this case the fixed point (0,0) is a proper node. It is unstable if s > 0 and stable if s < 0. The solutionof the equations is
x(t) = Aest ,
y(t) = Best ,
The integral curves x =Cy, that is, a family of straight lines through the origin.
Case 5: Complex roots
If the roots are complex, then they are of the form
r1,r2 = α± iβ,
where α,β ∈ R. We distinguish the following cases;
1. If α 6= 0, the fixed point is called a spiral or focus. It is a stable focus if α < 0 and an unstablefocus if α > 0.
2. If α = 0, then the roots are purely imaginary and the fixed point is called a centre. A centre is anexample of a fixed point that is neutrally stable.
Example 9 Find the fixed points, and sketch the phase portrait of the system
x = 2x− y,y = x+2y. (3.10)
Setting x = y = 0 gives the fixed point (0,0). Note that the characteristic polynomial is
(r−2)2 +1 ⇒ r = 2± i.
Hence the origin is an unstable spiral.
61

SECOND ORDER LINEAR SYSTEMS: FIXED POINTS AND PHASE PORTRAITS WEEK 2 TUTORIAL
PROBLEMS
1. Write the following systems in matrix form and obtain the eigenvalues and eigenvectors of thecoefficient matrix.
(a) x =−y, y =−x.
(b) x = 3x−2y, y = 2y− x.
2. Consider the system x =−y, y =−x.
(a) Sketch the vector field.
(b) Show that the trajectories of the system are hyperbolas of the form: x2− y2 =C
(c) The origin is a saddle point; find equations for its stable and unstable manifolds.
(d) The system can be decoupled and solved as follows. Introduce new variables u and v whereu = x+ y, v = x− y. Then rewrite the system in terms of u and v. Solve for u(t) and v(t),starting from an arbitrary initial condition u0,v0).
(e) What are the equations for stable and unstable manifolds in terms of u and v?
3. For each of the following systems, decide whether the origin is attracting, Liapunov stable, asymp-totically stable or none of the above.
(a) x = 0, y =−y
(b) x =−x, y =−5y.
(c) x = 2y, y = x.
4. Consider the system x = 4x− y, y = 2x+ y.
(a) Write the system as x = Ax. Show that the characteristic polynomial is λ2−5λ+6, and findthe eigenvalues and eigenvectors of A.
(b) Find the general solution of the system.
(c) Classify the fixed point at the origin.
(d) Solve the system subject to (x0,y0) = (3,4).
5. (COMPLEX EIGENVALUES) This exercise leads you through the solution of a linear system wherethe eigenvalues are complex. The system is x = x− y, y = x+ y.
(a) Find A and show that it has eigenvalues λ1 = 1+ i, λ2 = 1− i, with eigenvectors v1 = (i,1),v2 = (−i,1). [ Note that the eigenvalues are complex conjugates, and so are the eigenvectors– this is always the case for real A with complex eigenvalues.)
62

(b) The general solution is x(t) = c1eλ1tv1 + c2eλ2tv2. This way of writing x(t) involves complexcoefficients and looks unfamiliar. Express x(t) purely in terms of real-valued functions. (Hint:use eiωt = cosωt + isinωt to write x(t) in terms of sines and cosines, and then separate theterms that have a prefactor of i from those that don’t.)
6. Plot the phase portrait and classify the fixed point of the following linear systems.
(a) x = y, y =−2x−3y
(b) x = 5x+2y, y =−17x−5y.
7. The motion of a damped harmonic oscillator is described by mx+bx+ kx = 0, where b > 0 is thedamping constant.
(a) Rewrite the equation as a two-dimensional linear system.
(b) Classify the fixed point at the origin and sketch the phase portrait. Be sure to show all thedifferent cases that can occur, depending on the relative sizes of the parameters.
63

Chapter 4
Phase plane analysis
In this chapter we want to extend our discussion of systems of equations started in the previous chapterto nonlinear equations. A typical example of such systems that we shall be concerned about are theLotka-Volterra equations:
x = Ax−Bxy (= f (x,y))y = −Cy+Dxy (= g(x,y)).
These equations model the dynamics of the interaction of competing species, in this case the predatorsx(t) and the prey population y(t). The first thing to note is that nonlinear equations are notoriouslydifficult to solve and invariably, the tendency is to resort to numerical methods such as the Runge - Kuttamethods. The basic aim here remains unchanged: we want to find the long-term behaviour of the system.
Expected Learning Outcomes
My expectations are that when we are done with this chapter, you should be familiar with following
• Linearization
• Find the fixed points and corresponding equilibrium solutions of nonlinear systems.
• Change from cartesian to polar coordinates, and vice-versa.
• Establish the non-existence of periodic orbits using one or more of the following:
1. the system is a gradient system,
2. constructing a suitable Liapunov function,
3. using or Bendixon-Dulac negative criterion.
• Establish the existence of periodic orbits using the Poincáre -Bendixon theorem.
64

• Routh-Hurwitz conditions
• Hopf bifurcation theorem
4.1 Summary
Theorem 4 (Existence and uniqueness Theorem) The initial value problem x = f (x), x(0) = x0 has aunique solution x(t) on some interval (−τ,τ) if f is;
1. continuous, and
2. all its partial derivatives are continuous for all x in the interval.
Note that the system is stable if x(t)→ 0 as t → ∞. It is unstable otherwise. In terms of the eigen-values, λ1,λ2, . . ., of the system, the real parts of all the λ‘s must be strictly negative for stability to beguaranteed.
COROLLARY
1. Different trajectories never intersect (if they did, the uniqueness theorem would be violated).
2. In a closed orbit C, any trajectory starting inside C is trapped forever inside C.
3. If there are fixed points inside C, then the trajectory might eventually approach one of them.
4.1.1 Fixed Points and Linearization
Given
dxdt
= f (x,y)
dydt
= g(x,y),
the fixed points are x∗, y∗ such that f (x∗,y∗) = 0 and g(x∗,y∗) = 0. The linearized system has the form
(xy
)=
(∂ f∂x
∂ f∂y
∂g∂x
∂g∂y
)(xy
).
65

Let
J =
(∂ f∂x
∂ f∂y
∂g∂x
∂g∂y
)=
(a11 a12a21 a22
),
where J is called the Jacobian or community matrix.
We look for solutions of the form
x(t) = x0eλt
y(t) = y0eλt .
For the classification of the fixed points, calculate the eigenvalues and proceed as in Worksheet 2.
4.1.2 The effect of small nonlinear terms
The fixed points as predicted by the linearized system are the same as those of the nonlinear system, ifthey are;
1. SADDLE POINTS,
2. SPIRALS,
3. NODES.
If the linearized system predicts that the fixed points are borderline cases, that is centers, star nodes,degenerate nodes or non-isolated fixed points, then we cannot guarantee that the nonlinear system reallyhas this type of fixed point. These may be altered by small nonlinear terms. The stability is establishedas in Worksheet 2.
4.1.3 Polar coordinates
Sometimes it is easier to deal with a seemingly complicated nonlinear system by first transforming it intopolar coordinates (IMPORTANT: I expect you to be able to do this). Let x = r cosθ, y = r sinθ so thatx2 + y2 = r. Then using θ = tan−1(y/x), show that θ = (xy− yx)/r2.
Alternatively, we could proceed by using complex numbers. In particular, let
x+ iy = reiθ = r(cosθ+ isinθ)⇒ x+ iy = (r+ irθ)eiθ.
66

4.1.4 Hyperbolic Fixed points
If Re(λ) 6= 0 for both eigenvalues, the fixed point is often called hyperbolic (Notice that all saddle pointsare hyperbolic!). The stability type of hyperbolic fixed points is not affected by small nonlinear terms.Non-hyperbolic fixed points are more fragile.
4.1.5 Topological equivalence
Two phase portraits are topologically equivalent if one is a distorted version of the other, obtained e.g.,by bending or warping. Ripping is not allowed, e.g., a closed orbit must remain a closed orbit even afterdistortion.
TOPOLOGICAL equivalence implies homeomorphism (a continuous deformation with a continuous in-verse) that maps one local phase portrait onto the other while preserving the direction of the arrows.
Theorem 5 (Hartman-Grobman Theorem) The local phase portrait near a hyperbolic fixed point istopologically equivalent to the phase portrait of the linearization, in particular, the stability of the fixedpoint is preserved by linearization.
4.1.6 Conservative Systems
These are system for which a conserved quantity exists. Usually, energy is the conserved quantity. Ifx = F(x) (Newton’s law), set
F(x) =−dVdx
.
Integrate to get the energy E(x).
67

PHASE PLANE ANALYSIS: WORKSHEET 3 TUTORIAL PROBLEMS
1. PHASE PORTRAITS: For each of the following systems, find the fixed points. Sketch the nullclinesand a plausible phase portrait.
(a) x = x− y, y = 1− ex,
(b) x = x(2− x− y), y = x− y,
(c) x = x(x− y), y = y(2x− y).
2. FIXED POINTS AND LINEARIZATION: Find the fixed points, classify them, sketch the neighbour-ing trajectories, and try to fill in the rest of the phase portrait.
(a) x = x− y, y = x2−4,
(b) x = 1+ y− e−x, y = x3− y,
(c) x = xy−1, y = x− y3.
3. Consider the system x = y3−4x, y = y3− y−3x.
(a) Find all the fixed points and classify them
(b) Show that the line x− y is invariant, i.e., any trajectory that starts on it stays on it.
(c) Show that |x(t)− y(t)| → 0 as t→ ∞ for all trajectories. (Hint: form a differential equationfor x− y.)
4. NONLINEAR TERMS CAN CHANGE A STAR INTO A SPIRAL: This example shows that border-line fixed points (stars, centers, degenerate nodes) are sensitive to nonlinear terms. Consider thesystem in polar coordinates given by r =−r, θ = 1/ lnr.
(a) Find r(t) and θ(t) explicitly (brush up your first year integration!) given an initial condition(r0,θ0).
(b) Show that r(t)→ 0 and |θ(t)| → ∞ as t → ∞. Therefore the origin is a stable spiral for thenonlinear system.
(c) Write the system in x, y coordinates.
(d) Show that the linearized system about the origin is x = −x, y = −y. Thus the origin is astable star for the linearized system.
5. LOTKA-VOLTERRA EQUATIONS:
(a) Find the fixed points, investigate their stability, draw the nullclines, and sketch the plausiblephase portraits. Indicate the basins of attraction of any stable fixed points where x = x(3−2x− y), y = y(2− x− y) with x,y≥ 0.
68

(b) The following system of differential equations models an interaction between two popula-tions:
x = x(1− x)−αxyy = βxy− γy,
where α, β and γ are strictly positive constants.
i. Briefly describe the type of interaction that these equations might be modelling.ii. Find the equilibrium points of these equations and determine the values of the parame-
ters for which they satisfy x≥ 0, y≥ 0 and the values for which they are asymptoticallystable.
iii. Sketch phase portraits of the system for the cases (a) γ > β and (b) γ < β.
6. CONSERVATIVE SYSTEMS. Consider the system x = x3− x.
(a) Find all the equilibrium points and classify them.
(b) Find a conserved quantity.
(c) Sketch the phase portrait.
7. REVERSIBLE SYSTEMS: Show that the system x = y(1− x2), y = 1− y2 is reversible.
8. SIMPLE PENDULUM: Consider a simple pendulum with no damping and no external drivingforce:
mLd2θ
dt2 =−mgsinθ⇒ d2θ
dt2 +gL
sinθ = 0.
Show that
(a) the origin is a nonlinear centre,
(b) the system is conservative,
(c) find a conserved quantity,
(d) Sketch a phase portrait for the system.
9. PENDULUM WITH DAMPING: Now consider θ+bθ+ sinθ = 0:
(a) Show that
θ = vv = −sinθ−bv.
(b) Find and classify the fixed points.
(c) Show that the energy of the system, E decreases monotonically along the trajectories.
(d) Complete the phase portrait.
◦◦o 0 o◦◦
69

4.2 Limit cycles and periodic solutions
A limit cycle is an isolated closed trajectory.
Theorem 6 (Limit Cycles) A limit cycle in the plane must enclose at least one fixed point. Any fixedpoint enclosed by a limit cycle cannot be a saddle point.
4.2.1 Existence and non-existence of periodic orbits
Theorem 7 (Non-existence of closed orbits) A dynamical system would not have closed orbits if:
1. it is a gradient system, that is, x =−∇V where V (x) is a single valued scalar function.
2. a Liapunov function exits (this is an energy-like function that decreases along the trajectories.
3. Dulac’s or Bendixson Negative Criterion applies.
PROOF OF (1): (By contradiction) Suppose on the contrary that there is a closed orbit C with period Tsuch that x(T ) = x(0). Then
x(T ) = x(0)⇒V (x(T )) =V (x(0)),
(i.e. there are 2 times 0 and T when the potential is the same. However, by chain rule
dVdt
=dVdx
dxdt
=−(
dVdx
)2
≤ 0.
So V (t) is strictly decreasing function of time and either x(t) is a fixed point for all time or the assumptionis not correct. There is thus no trajectory x(t) such that x(T ) = x(0).
NB:
1. All one-dimensional systems are gradient systems since x = f (x) =−dVdx
,
(and we have said earlier there are no oscillations in 1-dimensional systems).The proof above can thus be used as an alternative to the one given in lectures to show that thereare no oscillations in 1-dimensional systems.
2. Most 2-dimensional systems are NOT gradient systems.
70

3. A gradient system would exist if
x =−dVdx
y =−dVdy
}⇒ ∂2V
∂x∂y=
∂2V∂y∂x
⇒ ∂x∂y
=∂y∂x
(4.1)
Definition 16 (Liapunov function) A function V (x) is a Liapunov function if the two conditions belowhold:
1. V (x)> 0 for all x 6= x∗ and V (x∗) = 0, (i.e, V must be positive definite),
2.dVdt
< 0 for all x 6= x∗, that is,dVdt
is negative definite, meaning all trajectories “flow downwards
towards x∗”.
If the above conditions are satisfied then:
1. there no closed orbits, and
2. x∗ is (globally) asymptotically stable.
IfdVdt≤ 0, (that is, negative semi-definite) then x∗ is stable.
PROBLEM: There is no systematic way to construct V (x), often try sums of squares.
Theorem 8 (Bendixson Negative Criterion) Let x = f (x) where f is continuously differentiable on asimply connected region R. if
∇ · f =∂x∂x
+∂y∂y
has one sign in R, that is, either ∇ · f > 0 or ∇ · f < 0, then there are no closed orbits lying entirely in R.
Bendixson’s negative criterion can be generalized to DULAC’S CRITERION:
Theorem 9 (Dulac’s Criterion) If there exists a real valued function g(x) such that
∇ · (gx) = ∇ · (g f ),
has one sign in R, then there are no closed orbits in R.
71

PROBLEM: There is no general algorithm or systematic way of constructing this g(x).
Closed orbits would exist if the Poincaré-Bendixson Theorem holds.
Theorem 10 (Poincaré-Bendixson Theorem) Let f and g have continuous first order partial derivativeson the closed bounded region R and assume that the system
x = f (x,y), y = g(x,y),
has no fixed points in R. If there exists a trajectory C that is confined within R, then either C is a closedorbit or it spirals toward a closed orbit as t→ ∞ In either case, the system contains a closed orbit.
Alternatively, the Poincaré-Bendixson Theorem may be stated in the simpler form: If there are no fixedpoints within C, then the trajectory must eventually approach a closed orbit.
The Poincaré-Bendixson Theorem is one of the central results of nonlinear dynamics.
4.2.2 Van der Pol Oscillator
This an oscillator whose motion is governed by the van der Pol equation
x+ ε(x2−1)x+ x = 0 where ε > 0.
The damping term is ε(x2−1)x so that when |x|< 1 amplification occurs and when |x|> 1 decay occurs.Alternatively;
x = yy = −ε(x2−1)y− x.
4.2.3 Liénard System
This is a generalization of the van der Pol equation and models oscillating circuits with the equation;
x+ f (x)x+g(x) = 0,
or equivalently;
x = yy = −g(x)− f (x)y.
Theorem 11 (Liénard’s Theorem) Let f (x) and g(x) be continuous functions and let
F(x) =∫ x
0f (s)ds, G(x) =
∫ x
0g(s)ds.
72

The Liénard equationx = f (x)x+g(x) = 0,
has a unique nonconstant periodic solution provided all of the following conditions hold:
1. f (x) is even, that is f (−x) = f (x).
2. F(x)< 0 for 0 < x < a, and F(x)> 0 for x > a for some a.
3. F(x)→+∞ as t→+∞ monotonically for x > a;
4. g(x) is an odd function with g(x)> 0 for x > 0, and
5. G(x)→+∞ as x→+∞.
NB. In some books Liénard’s Theorem is referred to as the Levinson and Smith’s Theorem
4.2.4 Weakly nonlinear oscillators
These are equations of the form
x+ x+ εh(x, x) = 0 where 0≤ ε << 1,
and h(x, x) is an arbitrary smooth function. Weakly nonlinear oscillators represent small perturbationsof the linear oscillator x+ x = 0. Two important examples are the:
1. VAN DER POL EQUATION: x+ x+ ε(x2−1)x = 0 and the
2. DUFFING EQUATION: x+ x+ εx3 = 0.
73

POLAR COORDINATES, POINCARE-BENDIXON THEOREM: WEEK 4 TUTORIAL PROBLEMS
1. Sketch the phase portraits and each limit cycle and fixed point.
(a) r = r3−4r, θ = 1,
(b) r = r(1− r2)(9− r2), θ = 1.
(c) x = x− y− x(2r− r2), y = x+ y− y(2r− r2).
2. Show that the system r = r(1− r2), θ = 1 is equivalent to
x = x− y− x(x2 + y2), y = x+ y− y(x2 + y2),
where x = r cosθ and y = r sinθ.
3. Consider the system x+ax(x2 + x2−1)+ x = 0, where a > 0.
(a) Find all the fixed points and classify them
(b) Show that the system has a circular limit cycle, and find its period.
(c) Determine the stability of the limit cycle.
4. RULING OUT CLOSED ORBITS:
(a) Plot the phase portrait of the gradient system V (x) = x2 + y2.
(b) Decide whether the system is a gradient system
i. x = 2x, y = 8y,
ii. x =−2xex2+y2, y =−2yex2+y2
.
(c) Show that the system x = y−x3, y =−x−y3 has no closed orbits by constructing a Liapunovfunction V = ax2 +by2 with suitable a, b.
5. POINCARÉ-BENDIXSON THEOREM:
(a) Consider x = x− y− x(x2 +5y2), y = x+ y− y(x2 + y2).
i. Classify the fixed point at the origin.ii. Rewrite the system in polar coordinates.
iii. Determine the circle of maximum radius r1 centred at the origin such that all trajectorieshave a radially outward component on it.
iv. Determine the circle of minimum radius r2 centred at the origin such that all trajectorieshave a radially inward component on it.
v. Prove that the system has a limit cycle somewhere in the trapping region r1 ≤ r ≤ r2.
74

(b) Given the system
x = x(1− x2−4y2)− y(a+ x)y = y(1− x2−4y2)+ x(a+ x),
where a is a parameter that can be positive, negative or 0. Decide whether this system hasany closed orbits.
(c) Consider x = y+ax(1−2b−r2), y =−x+ay(1−r2) where a and b are parameters 0 < a≤1,0≤ b < 1 and r2 = x2 + y2.
i. Rewrite the system in polar coordinatesii. Prove that there is at least one limit cycle,
iii. Prove that for b = 0 there is only one limit cycle.
75

Appendix A: Solutions to selected questions
WORKSHEET 1: ONE-DIMENSIONAL SYSTEMS
1. (a) To get you start, let x = y and z = t, then the system x = x2 +(1+ εcos t)x reduces to
x = yy = y2 +(1+ εcosz)xz = 1.
Complete the rest of the solutions
(b)
(c)
2. These are simple second year problems, but to help you practice your Matlab skills, here are simpleprograms you could use to plot the curves:
(a) Given x′ =−x(t),x(0) = 1, write a program (and save it as func1.m):
function dxdt=func1(t,x)dxdt=-x;
Note that the function func1 calculates the right-hand side of the differential equation youwant to solve. Now, at the command prompt, type the following commands:
clear[t,x]=ode45(’func1’,[0,5], 1);plot(t,x)xlabel(’time’)ylabel(’function values’)
The above would give the output in Fig. 4.1. In the line [t,x]=ode45(’func1’,[0,5], 1), the 0and the 5 are the initial and final values of t. The 1 is the initial value of x. Since our initialcondition was x(0) = 1, we started at y at 1 and t at 0.
(b) To sketch the graph of the IVP: x′ = x(4− x), x(0) = 1, you could write a program func2.mas;
76

0 1 2 3 4 50
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
time
fun
ctio
n v
alu
es
Figure 4.1: The graph of x′ =−x(t) for 0≤ t ≤ 5 and x(0) = 1
function dxdt=func2(t,x)dxdt=x*(4-x);
Now, use the command [t,x]=ode45(’func2’ [0,5], 1) at the prompt to get Fig. 4.2.
0 0.5 1 1.5 21
1.5
2
2.5
3
3.5
4
time
func
tion
valu
es
x’ = x(4−x), x(0) = 1
Figure 4.2: The graph of x′ = x(x−4) for 0≤ t ≤ 5 and x(0) = 1
(c) etc!
(d) etc!
(e) The graph of x′ = 1− x/(1+ t), x(0) = 0 would look like Fig. 4.3.
3. (a) x = (x−1)(x+2): Fixed points x = 0⇒ x∗ =−2, 1.
(i) -2 attractor, 1 repeller(ii) If x(0) < −2, x(t) increases with limt→∞ x(t) = −2; if −2 < x(0) < 1, x(t) decreases
with limt→∞ x(t) =−2. If 1 < x(0), x(t) increases without bound.
(b) x = (x−1)(x+2)(x+3): Fixed points x = 0⇒ x∗ =−3, −2, 1.
77

0 0.5 1 1.5 20
0.2
0.4
0.6
0.8
1
1.2
1.4
time
func
tion
value
s
x′ = 1 − 1
1 + tx, x(0) = 0
Figure 4.3: The graph of x′ = 1−1/(1+ t)x for 0≤ t ≤ 2 and x(0) = 0
(i) -2 attractor, -3, 1 repellers(ii) If x(0) < −3, x(t) decreases without bound. If −3 < x(0) < −2, x(t) increases with
limt→∞ x(t) = −2; if −2 < x(0) < 1, x(t) decreases with limt→∞ x(t) = −2. If −2 <x(0)< 1 x(t) decreases with limt→∞ x(t)=−2. If 1< x(0), x(t) increases without bound.
(c) x = (x−1)2(x+2): Fixed points x = 0⇒ x∗ =−2, 1.
(i) -2 repeller, 1 neither(ii) If x(0) < −2, x(t) decreases without bound. If −2 < x(0) < 1, x(t) increases with
limt→∞ x(t) = 1. If 1 < x(0), x(t) increases without bound.
(d) x =(3− x)(1+ x)
x2− x+2: Fixed points x = 0⇒ x∗ =−1, 3.
(i) -1 repeller, 3 attractor(ii) If x(0) < −1, x(t) decreases without bound. If −1 < x(0) < 3 x(t) increases with
limt→∞ x(t) = 3. If 3 < x(0), x(t) decreases with limt→∞ x(t) = 3.
(e) x = (x2−9)(sinx−2). Fixed Points: x = 0⇒ x∗ =±3.
(i) -3 repeller, 3 attractor(ii) If x(0) < −3, x(t) decreases without bound. If −3 < x(0) < 3 x(t) increases with
limt→∞ x(t) = 3. If 3 < x(0), x(t) decreases with limt→∞ x(t) = 3.
4. (a) f (x) = 2x7− 3x6 + x5− 2x+ 1⇒ f ′(x) = 14x6− 18x5 + 5x4− 2⇒ f ′(0.5) = −2.031 < 0:Attractor.
(b) f (x) = xe−x + sinx⇒ f ′(x) = (1− x)e−x + cosx⇒ f ′(0.5) = 2 > 0: Repeller.
5. To find the fixed points ofddt
x(t) = cosx− ex, you need to sketch the graphs of cosx and ex on the
78

same axis. The intersection points are the fixed points, see Fig. 2. Read these off from the graph.Now use the stability analysis to determine the stability of these intersection points.
NB. There are an infinite number of fixed points for this system.
−8 −6 −4 −2 0 2 4−5
0
5
10
15
20
25
x
f(x)
Figure 4.4: The graphs of cosx and ex plotted for −2π≤ x≤ π
6. Given f (x) = r0(1− x
k
)x− ex, where r0 and k are positive and e is non-negative; we are only
interested in the qualitative rather than the quantitative outlook of the problem. So, give r0, k ande arbitrary but sensible positive values that satisfy the conditions:
(a) e < r0 (see Fig 6a) and e > r0 (see Fig 6a).
7. (a) a must be an integer. To see why, for a well defined vector field on the circle, we needsin[a(θ+ 2πk) = sin(aθ) for all integers k. Hence 2πka = 2πn for some integer n. Thuska = integer for all k, meaning that a must also be an integer.
(b) The fixed points are obtained when θ = sin2θ = 0. The unstable fixed points are θ∗ = 0,π.The stable fixed points are θ∗ = ±π/2 (remember we are dealing with the flow on a circlerather than the real line).
4.3 Exercises: One-dimensional maps
1. FIXED POINTS AND COBWEBS: [You do the “cobwebing”]
(i) xn+1 =√
xn =⇒√
x = x or x2− x = 0 =⇒ x∗(x∗−1) = 0. Hence x∗ = 0 or x∗ = 1.
79

−0.5 0 0.5 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4Plot of f(x)=2(1−x)x−x
x
f(x)
Figure 4.5: Q 5(a) In this plot e < r0 with k = 1, r0 = 2 and e = 1
−1.2 −1 −0.8 −0.6 −0.4 −0.2 0 0.2−0.15
−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
Figure 4.6: Q 5(a) In this plot e > r0 with k = 1, r0 = 1 and e = 2
(ii) xn+1 = x3n =⇒ x3 = x =⇒ x(x2−1) = 0. Hence x∗ = 0 or x∗ =±1.
(iii) xn+1 = lnxn =⇒ lnx = x. This does not have a solution. You can see this if you plot y = lnxand y = x on the same axes.
2. (i) Fixed points: 3x− x3 = x⇒ x(x2− 2) = 0 =⇒ x∗ = 0 or x∗ = ±√
2. For stability: f ′(x) =3−3x2 =⇒ f ′(0) = 3 > 1, so x∗ = 0 is unstable and | f ′(±
√2)|= |−3|= 3 > 1, hence these
points are also unstable.
(ii) See if you can show that: The orbit starting at x0 = 1.9 remains bounded for all time but theorbit starting at x0 = 2.1 diverges to infinity as n→ ∞.
80

-4 -2 2 4
-7.5
-5
-2.5
2.5
5
7.5
Figure 4.7: Cobweb diagram for 2(ii).
3. NEWTON’S METHOD: xn+1 = xn−g(xn)
g′(xn)where g(x) = x2−4.
(a) Then g′(x) = 2x, hence xn+1 = xn−x2
n−42xn
=⇒ xn+1 =x2
n +42xn
.
(b) Fixed points:x2 +4
2x= x =⇒ x2−4 = 0 =⇒ x∗ =±2.
(c) f ′(x) =2x2−8
4x2 =⇒ f ′(±2) = 0. Hence the fixed points are superstable.
4. LOGISTIC MAP:
(a) Logistic map: f (x) = rx(1−x) so fixed points are x∗1 = 0 and x∗2 = 1− 1r
. So, f ′(x) = r(1−2x)
and f ′(0) = r. Thus x∗1 = 0 is superstable if and only if r = 0.
Similarly, | f ′(1−1/r)|= |r(2/r−1)|= 0 if and only if r = 0 or r = 2.[NB. taking r = 0 is obviously not a smart idea since this produces f (x) = 0!. So the onlyviable option for superstability is r = 2.]
(b) Let p and q be points in a 2-cycle for the logistic map.
(i) Then, since f ′(x) = r(1−2x), we want to find p and q such that
( f 2(p))′ = f ′( f (p)) f ′(p) = f ′(p) f ′(q) = r(1−2p) · r(1−2q) = 0.
81

Clearly, if r2(1−2p)(1−2q) = 0 then (assuming r 6= 0) either p =12
or q =12
.
(ii) We want r such that p = 1/2 or q = 1/2. Let us choose q = 1/2. Then
f (p) = q and f (q) = p (but q =12)
f (p) =12
and f (1/2) = p
rp(1− p) =12
and14
r = p⇒ r3−4r2 +8 = (r−2)(r2−2r−4) = 0,
⇒ r = 2 or r = 1+√
5 (since r ≥ 0.
Note that r = 2 is the condition for the map f (xn) to be stable, so rejecting this point,the condition for the 2-cycle to be superstable is r = 1+
√5.
5. QUADRATIC MAP: Given: xn+1 = f (xn) = r− x2n, then
(a) r− x2 = x⇒ x2 + x− r = 0⇒ x∗ =−12±√
1+4r2
for r ≥−14
.
(b) Find any values of r at which the fixed points bifurcate:To classify these bifurcations, notice that for r <−1/4 the fixed points do not exist. They are“born” when r0 =−1/4 (in which case x0 =−1/2). So at this point we have a change in existenceof the fixed points, in other words, a saddle node bifurcation.
(c) In the first place, a 2-cycle would exist if we can find a p and a q such that f (p) = q andf (q) = p. The 2-cycle would then be superstable if | f ′(p) f ′(q)| = 0. Now f ′(x) = −2x⇒f ′(p) =−2p, f ′(q) =−2q. Hence superstability implies
f ′(p) f ′(q) = (−2p)(−2q) = 4pq = 0.
Clearly, either p = 0 or q = 0. Let us assume that q = 0, then find an r such that:
f (p) = q and f (q) = p (but q = 0)f (p) = 0 and f (0) = p
r− p2 = 0 and r = p⇒ p− p2 = p(1− p) = 0,⇒ r = 0 or r = 1.
So we get the superstable value of r for the one-map, (r = p = q = 0) and the superstablevalue of r for the 2-map (r = p = 1, q = 0).Alternatively, we can obtain the same result by considering:
f 2(x) = r− (r− x2)2⇒ ( f 2)′(x) =−2(r− x2)(−2x) = 4x(r− x2) = 0
82

⇒ x = 0 = q, r = x2 = p2.
Then proceed as before.
(d) Given that f ′(x) =−2x, the objective is to find a p and an q such that
|( f 2(p))′|= | f ′(p) f ′(q)|= |4pq|< 1.
This p (and q)is a solution of the second generation map f 2(p) = p. Thus
f 2(x) = r− (r− x2)2 = x⇒ r− (r2−2rx2 + x4) = x⇒ x4−2rx2 + x+ r2− r = 0 now factorize⇒ x4−2rx2 + x+ r2− r = (x2 + x− r)(x2− x+1− r) = 0.
The first term comprises the fixed points of the map f (xn). The points p and q on the 2-cycleare solutions of (x2− x+1− r) = 0. So,
p =12+
12
√4r−3 and q =
12− 1
2
√4r−3.
Hence
λ = f ′(p) f ′(q) = 4(
12+
12
√4r−3
)(12− 1
2
√4r−3
)=−4r+4.
For stability we require
|−4r+4|< 1⇒−1 <−4r+4 < 1⇒ 34< r <
54.
Thus at r = 5/4 the 2-cycle loses its stability. Check for flip bifurcation at r = 3/4.
6. CUBIC MAP: xn+1 = f (xn) = rxn− x3n.
(a) Fixed points: rx− x3 = x =⇒ x3− (r− 1)x = 0 =⇒ x∗ = 0 or x∗ = ±√
r−1. These ex-ist provided r ≥ 1. Now f ′(x) = r− 3x2 so that | f ′(0)| = |r| < 1 if −1 < r < 1. And| f ′(±
√r−1)|= |−2r+3|< 1 if 1 < r < 2.
(b) Suppose that f (p) = q and f (q) = p. Then p,q are roots of the second generation mapf 2(x) = x. Now;
f 2(x) = f ( f (x)) = x⇒ r(rx− x3)− (rx− x3)3 = x
83

⇒ x9−3rx7 +3r2x5− r(r+1)x3 + r2x− x = 0⇒ x[x3−3rx6 +3r2x4− r(r2 +1)x2 + r2−1] = 0.
Factorizing the term in brackets with the help of long division (taking note that the fixedpoints are solutions of this equation so that x2− r−1 and x2− r+1 are factors) we get
x[x3−3rx6 +3r2x4− r(r2 +1)x2 + r2−1] = x(x2− r+1)(x2− r−1)(x4− rx2 +1) = 0
The 2-cycles are solutions of the equation x4− rx2 +1 = 0 (after rejecting the fixed points).Let y = x2. Then
x4− rx2 +1 = 0 ⇒ y2− ry+1 = 0
⇒ y =12
r± 12
√r2−4, provided r2−4≥ 0
⇒ x =±√
12
r± 12
√r2−4
7. LIAPUNOV EXPONENT: Calculate the Liapunov exponent for the linear map xn+1 = rxn.
◦◦o 0 o◦◦
84

BIFURCATION OF MAPS
(A) TRANSCRITICAL BIFURCATION: The normal form is xn+1 = f (xn) = (1+ r)xn− x2n.
(a) Fixed points: f (x) = (1+ r)x− x2 = x⇒ x∗ = 0,r.
(b) Stability: f ′(0) = 1+ r so x∗ = 0 is stable if |1+ r|< 1⇒−1 < 1+ r < 1⇒−2 < r < 0 andx∗ = r is stable if | f ′(r)|= |1− r|< 1⇒ 0 < r < 2.
Transcritical bifurcation (change of stability) occurs at r = 0.
(B) SADDLE-NODE BIFURCATION (aka tangent or fold bifurcation):The NORMAL FORM is xn+1 =f (xn) =−r+ xn + x2
n.
(a) Fixed points: Set x =−r+ x− x2⇒ x2 = r⇒ x∗ =±√r, r ≥ 0.
(b) Stability: f ′(√
r) = 1+ 2√
r > 1 so x∗ =√
r is unstable. And f ′(−√r) = 1− 2√
r which isstable if 0 < r < 1.
(C) FLIP BIFURCATION: We didn’t meet this one for continuous time dynamical systems. Flip bifurca-tion occurs when:
(a) f (x∗) = x∗ where x∗ is a fixed point, and
(b) f ′(x∗) =−1.
You will get flip bifurcation, if, in the cobweb diagram, the slope of the tangent at x∗ is −1 (i.e.f ′(x∗) = −1). The cobweb would have a stable 2-cycle close to x∗. The 2-cycle also exits belowthe bifurcation and is unstable. Try this problem.
(EXTRA) Let xn+1 = f (xn) where f (x) =−(1+ r)x− x2−2x3.
(i) Classify the linear stability of the fixed point x∗ = 0.(ii) Show that a flip bifurcation occurs at x∗ = 0 when r = 0.(iii) By considering the first few terms in the Taylor expansion of f 2(x) or otherwise, show
that there is an unstable 2-cycle for r < 0.
◦◦o 0 o◦◦WORKSHEET 2: 2-DIMENSIONAL SYSTEMS1
1. (a) x(t) =(
0 −1−1 0
)x(t), P(λ) = det(A−λI) = λ
2−1. Hence λ1,2 = ±1. To find the
eigenvectors we need to solve (A− λI)v = 0 for each λ where v = (v1,v2)T . Thus for the
1You should always check the solutions (and let me know of errors, typos, etc)
85

eigenvalue λ1 = 1, the corresponding eigenvector is;
(−1 −1−1 −1
)(v1v2
)=
(00
)⇒ v1 =
(1−1
)s,
where s is arbitrary. Now (for simplicity) take s = 1, so that v1 = (1,−1)T . Find the eigen-vector corresponding to λ2 =−1 in the same way to be v2 = (1,1)T .
(b) x(t) =(
3 −2−1 2
)x(t) so P(λ) = det(A−λI) = λ2−5λ+4. Hence λ1 = 1, λ2 = 4. The
eigenvectors are v1 = (1,1)T and v2 = (1,−1)T .
2. This is the system in 1 (a).
(a)dydx
=dydt
dtdx
=xy⇒ xdx− ydy = 0⇒ x2− y2 =C.
(b) You can plot the above by hand, Matlab or Mathematica.
(c) The eigenvalues are real, distinct and with opposite signs (obviously) showing that the originis a saddle point. The manifolds are obviously the lines y = x and y = −x corresponding tothe eigenspace spanned by the eigenvectors v1 and v2 in 1(a).
Alternatively we may proceed as follows, from (a),dydx
=xy= m (the gradient). Now substi-
tute the equation of a straight line y = mx (through the origin) to get
xy=
xmx
= m⇒ m2x− x = 0⇒ m2−1 = 0 ⇒ m =±1
So we have 2 lines passing through the origin with gradients m = 1 and m =−1. These arethe manifolds, what is left is to decide which one is stable and which one is unstable. The linecorresponding to the eigenvalue with a negative sign would be the stable manifold while thepositive eigenvalue would give the unstable manifold: stable manifold: x = y and unstablemanifold: x =−y. Compare with the approach in Nagle & Saff.
(d) Note that x =12(u+ v) and y =
12(u− v). From u = x+ y and v = x− y;
u = x+ y =−y− x =−u,
86

v = x− y =−y+ x = v.
To solve this system, not that the characteristic polynomial is
P(λ) = |A−λI|= (λ+1)(λ−1) = 0⇒ λ =±1.
These are the same as in 2(a).
(e) Check how 2(c) was done!
3. (a) Note that x(t) = x0 is constant for all time. Also A =
(0 00 −1
), so λ1 = 0, λ2 = −1.
Since τ = λ1 +λ2 =−1 < 0 we expect the origin to be stable. We also expect a whole line offixed points on the x-axis and decay along the y-axis. The origin is Liapunov stable.
(b) A =
(−1 0
0 −5
), so λ1 = −1, λ2 = −5. Since ∆ = λ1λ2 = 5 > 0 we expect a node and
since τ = λ1 +λ2 =−6 < 0 we expect a stable node. The origin is asymptotically stable.
(c) A =
(0 21 0
), so λ =±
√2 (real, distinct and opposite sign!). Now ∆ = λ1λ2 =−2 < 0 so
we expect a saddle point. The origin is unstable.
4. Given x = 4x− y, y = 2x+ y.
(a) x =
(4 −12 1
)x. Now, |A−λI|=
∣∣∣∣ 4−λ −12 1−λ
∣∣∣∣= λ2−5λ+6.
Eigenvalues: set λ2 − 5λ + 6 = 0, so λ1 = 2, λ2 = 3 and eigenvectors v1 = (1,2)T andv2 = (1,1)T .
(b) x(t) = c1
(12
)e2t + c2
(11
)e3t
(c) ∆ = 6 > 0 and τ = 5 > 0. The origin is an unstable node.
(d) x(t) = e2t +2e3t , y(t) = 2e2t +2e3t .
5. (a)
87

(b) x(t) = c1et(
cos tsin t
)+ c2et
(−sin t
cos t
).
6. (a)
(b)
7. Given mx+bx+ kx = 0, where b > 0, let x = v. Then v =−ω2x−µv where ω2 =
km, µ =
bm
. So,
(a)(
xy
)=
(0 1−ω2 −µ
)(xv
).
(b) The eigenvalues are; λ1,2 =−µ2± 1
2
√µ2−4ω2. The three possible scenarios are:
(i) µ2 > 4ω2 : distinct real eigenvalues with ∆ = λ1λ2 = ω2 > 0⇒ : origin must be a node.(ii) µ2 = 4ω2 : repeated (real) eigenvalue. If v0 is the eigenvector corresponding to λ =−µ/2 then the second solution is y(t)= teλtv0+eλtη where η is a solution of (A−λI)η=v0. [You should do the calculations to find y(t).]
(iii) µ2 < 4ω2: complex eigenvalues.
88

WORKSHEET 3: PHASE PLANE ANALYSIS2
1. PHASE PORTRAITS: For each of the following systems, find the fixed points. Sketch the nullclinesand a plausible phase portrait.
(a) NULLCLINES x = 0⇒ x = y and y = 0⇒ ex = 1. FIXED POINTS: Not that ex = 1 iff x =0⇒ y = 0 So the only fixed point is (x∗,y∗) = (0,0). To classify the fixed points, we first
find the Jacobian: J(x,y) =(
1 −1−ex 0
)⇒ J(0,0) =
(1 −1−1 0
). The characteristic
polynomial is:
P(λ) =∣∣∣∣ 1−λ −1−1 −λ
∣∣∣∣= λ2−λ−1,
with eigenvalues λ1,2 = (1±√
5)/2 (which are real, distinct and with opposite sign), τ = 1 >0, ∆ =−1 < 0 so the point (0,0) is a saddle point. To plot the phase portrait, you must firstfind the stable and unstable manifolds (which are not the same thing as the nullclines!). Findthe eigenvectors and proceed as in Worksheet 3.
(b) NULLCLINES:
x = 0⇒ x = 0 or y = 2− xy = 0⇒ y = x.
FIXED POINTS; (x∗,y∗) = (0,0) and (x∗,y∗) = (1,1) and the Jacobian;
J(x,y) =(
2−2x− y −x1 −1
)⇒ J(0,0) =
(2 01 −1
).
The eigenvalues are λ1 = 2 and λ2 =−1 with τ = 1, ∆ =−2⇒ τ2−4∆ > 0 so the fixed pointat (0,0) is a saddle point. Now find the e-values:
J(1,1) =(−1 −1
1 −1
),
so that τ =−2, ∆ = 2⇒ τ2−4∆ < 0. The fixed point at (1,1) is a stable spiral.The question does not ask for the following, but, go through it carefully.
2You know the drill; check the solutions!
89

• BASINS OF ATTRACTIONS: We can identify a basin of attraction for the stable point(1,1): The line x = 0 (i.e., the y-axis) is an invariant manifold (a nullcline which isparallel to the flow lines) and so acts as a separatrix (separating those points beingattracted and those moving away). All points in the right half-plane (x > 0) flow to(1,1).• MANIFOLDS: The stable manifold is the y-axis. The unstable eigenvector at (0,0) is(3,1)T , so the unstable manifold is a sheet stretching from the origin, in the direction(3,1) which goes to the stable spiral, and continues in the direction (−3,−1) to infinity.
(c) Nullclines: x = x(x− y) = 0⇒ x = 0, y = x, and y = y(2x− y) = 0⇒ y = 0, y = 2x.Fixed point (x∗,y∗) = (0,0). The Jacobian;
J(x,y) =(
2x− y −x2y 2x−2y
)⇒ J(0,0) =
(0 00 0
)⇒ λ = 0.
Ok, ok, sort this one out.
2. FIXED POINTS AND LINEARIZATION:
(a) Fixed points: x= x−y= 0⇒ y= x, y= x2−4= 0⇒ x=±2. So (x∗,y∗)= (2,2), (−2,−2).The Jacobian;
J(x,y) =(
1 −12x 0
)⇒ J(−2,2) =
(1 −1−4 0
), J(2,2) =
(1 −14 0
)
For (-2,2) λ = (1±√
17)/2⇒ τ = 1, ∆ = −4 < 0. This is a saddle point. NB. A saddlepoint is not one of the borderline cases, so we do expect the nonlinear system to have a saddlepoint at (−2,2).For (2,2) λ = (1± i
√15)/2⇒ τ = 1, ∆ > 0. My suspicion? An unstable spiral, but do check.
(b) Fixed points: x = 1+ y− e−x = 0 and y = x3− y = 0⇒ (x∗,y∗) = (0,0). The Jacobian;
J(x,y) =(
e−x 13x2 −1
)⇒ J(0,0) =
(1 10 −1
)⇒ P(λ) = λ
2−1.
So the eigenvalues are λ1,2 =±1. This is obviously a saddle point.
(c) You know the drill! (−1,−1), stable node and (1,1) saddle point.
3. For the system x = y3−4x, y = y3− y−3x.
(a) The fixed points would lie on the line y−x = 0 (subtracting y3−y−3x = 0 from y3−4x = 0).Stable node at (0,0) and saddle points at ±(2,2).
90

(b) Hhmmm, y− x = 0 is the (only?) nullcline above.
(c) Subtract the 2nd equation from the first to get
dxdt− dy
dt=−(x− y) ⇒ d
dt(x− y) =−(x− y)
⇒ 1x− y
d(x− y) =−dt
⇒ ln |x(t)− y(t)|=−t +C⇒ |x(t)− y(t)|= Ae−t → 0 as t→ ∞.
4. NONLINEAR TERMS CAN CHANGE A STAR INTO A SPIRAL:
(a) r(t) = r0e−t and θ(t) = θ0 +1
lnrt (having conveniently {but perhaps wrongly??} assumed
that lnr is a constant in the 2nd integration)
(b) Since e−t → 0 as t → ∞ then r(t)→ 0 but |θ(t)| → ∞ as t → ∞. Therefore the origin is astable spiral for the nonlinear system.
(c) x = r cosθ, y = r sinθ coordinates.
(d) Show that the linearized system about the origin is x = −x, y = −y. Thus the origin is astable star for the linearized system.
5. LOTKA-VOLTERRA EQUATIONS:
(a) Nullclines
x = 0⇒ x = 0 or 3−2x− y = 0,y = 0⇒ y = 0 or 2− x− y = 0.
Fixed points: (x∗,y∗) = (0,0),(0,2),(3/2,0),(1,1). All trajectories approach (1,1) exceptthose starting on the axes.
(b) Given the interaction between two populations:
x = x(1− x)−αxyy = βxy = γy,
where α, β and γ are strictly positive constants,
• the equations model a predator and prey system, x = prey and y = predator .
91

HHHHH
HHHHHH
HHHHHHH
\\\\\\\\\\\\\\
1.5 2
2
3
y
x
u
(0,0)e
e
e
Figure 4.8: Nullclines for 5(a) with fixed points, (1,1) is a stable node.
• Equilibrium points; (x∗,y∗) = (0,0),(1,0) and (x∗ = γ/β,y∗ = (1− γ/β)/α) with x≥ 0,y≥ 0 iff γ < β. Jacobian:
J(x,y) =(
1−2x−αy −αxβy βx− γ
),
J(0,0) =(
1 00 −γ
), saddle point,
J(1,0) =(−1 −α
0 β− γ
), saddle pointi f γ < β
J(γ/β,(1− γ/β)/α) =
(−x∗ −αx∗βy∗ 0
), τ =−x∗ < 0,∆ = αx∗y∗,
so stable iff x∗ > 0, y∗ > 0, i.e., if γ < β.• Phase portraits of the system for the cases (a) γ > β and (b) γ < β.
6. CONSERVATIVE SYSTEMS: x = x3− x.
(a) Let x = y, so the system becomes
x = yy = x3− x.
92

@@@@@@@@
bbbbbbbbbbbbbb
r/b r/b 1
1a
y
x x
y
(i) (ii)
Figure 4.9: Phase portraits for 5(b).
The equilibrium points: x = 0⇒ y∗ = 0 and y = 0 = x(x2−1)⇒ x∗ = 0,±1. So (x∗,y∗) =(0,0),(±1,0). The Jacobian is
J(x,y) =(
0 13x2−1 0
)=⇒ J(0,0) =
(0 1−1 0
)=⇒ λ =±i.
Hence (0,0) is a linear centre. Now check that it is a nonlinear centre by showing that thesystem is reversible, that is, it is invariant under the change of variables t→−t and y→−y.Thus we have a centre at (0,0). Sketch the phase portrait near the origin.
(b) The conserved quantity (energy)is given by
E(x) =12
x2 +V (x) where y =−dVdx
= x3− x
=12
y2 +12
x2− 14
x4.
(c) From the Jacobian,
J(x,y) =(
0 13x2−1 0
)=⇒ J(±1,0) =
(0 12 0
)=⇒ λ =±
√2.
93

Hence (±1,0) are saddle points. Sketch the phase portrait around each point and thencombine these plots with the plot in (a) to obtain the phase portrait for the system.
7. REVERSIBLE SYSTEMS: The system x = y(1− x2), y = 1− y2 is reversible since the equationsare invariant under t→−t, y→−y.
8. SIMPLE PENDULUM. Given
mLd2θ
dt2 =−mgsinθ⇒ d2θ
dt2 +gL
sinθ = 0,
non-dimensionalize the system by setting: τ =tT
= ωt, ω =
√gL
, so that
θ+ sinθ = 0 (θ =dθ
dτ).
So, the flow in the phase plane is
θ = vv = −sinθ.
The fixed points are (nπ,0) where n ∈ Z. The Jacobian is: J(θ,v) =(
0 1−cosθ 0
). If n is zero
or even;
J(0,0) = J(2kπ,0) =(
0 1−1 0
), λ =±i.
Hence (0,0) is a linear centre. Now note that the system is invariant under the transformationτ→−τ, v = −v. Hence the system is reversible, implying that (0,0) is a nonlinear centre. Toshow that the system is conservative, note that
θ+ sinθ = 0 ⇒ θ(θ+ sinθ) = 0 ⇒ ddt(12
θ2− cosθ) = 0
⇒ E(θ,v) = (12
θ2− cosθ)
94

=12
v2−[
1− 12
θ2 + . . .
]' 1
2(θ2 + v2)−1,
remember here that near (0,0), θ is small and so we have no problem expanding the cosine term.Hence E has a local minimum at (0,0) and so the origin is a nonlinear centre. If n = 2k+1, then
J(π,0) = J((2k+1)π,0) =(
0 11 0
), λ =±1,
λ1 = 1 : v1 =
(11
), λ2 =−1 : v2 =
(1−1
).
9. PENDULUM WITH DAMPING. Given; θ+bθ+ sinθ = 0,
(a)
(b) The fixed points are (0,0) and integer multiplies of π so that;
J(0,0) = J(2kπ,0) =(
0 1−cosθ −b
), fixed points stable spirals 0 < b < 2
J(π,0) = J((2k+1)π,0) =(
0 11 −b
), saddle points.
(c) Change in energy along a trajectory:
dEdτ
=ddt[12
v2− cosθ) = vv+ sinθθ
= v(−sinθ−bv)+ vsinθ
= −bv2 =−bθ2 ≤ 0
Hence E decreases monotonically along trajectories except at v = θ = 0.
(d) ?? You are on your own buddy!
◦◦o 0 o◦◦
95

WORKSHEET 4: LIMIT CYCLES3
1. PHASE PORTRAITS:
(a) Given: r = r3− 4r, θ = 1; then r = 0⇒ r∗(r2− 4) = 0⇒ r∗ = 0 or r∗ = 2. The fixedpoints are the origin (0,0) and the circle r∗ = 2. The flow is counterclockwise (since θ = 1 >0).
• For 0 < r < 2, r < 0⇒ r is decreasing, so trajectories in this region spiral away fromthe circle towards the origin.• For r > 2, r > 0⇒ r is increasing, so trajectories in this region spiral towards infinity.
The limit cycle r = 2 is unstable.
(b) r = r(1− r2)(9− r2), θ = 1, so r = 0⇒ r∗ = 0,1 or r∗ = 3. The fixed points are then theorigin and 2 limit cycles r = 1 and r = 3. The flow is counterclockwise (since θ = 1 > 0).
• For 0 < r < 1, r < 0⇒ r is decreasing, so trajectories in this region spiral away fromthe circle towards the origin.• For 1 < r < 3, r < 0⇒ r is decreasing, so trajectories in this region spiral towards the
limit cycle r = 1. The limit cycle r = 1 is semi-stable.• For r > 3, r > 0⇒ r is increasing, so trajectories in this region spiral away towards
infinity. The limit cycle r = 3 is unstable.
(c) Given: x = x− y− x(2r− r2), y = x+ y− y(2r− r2), the 1st thing is to rewrite the system
in polar coordinates. Since r2 = x2 + y2 and θ =1r2 (xy− yx) (you can work this out from
tanθ =yx
) then;
rr = xx+ yy = x[x− y− x(2r− r2)]+ y[x+ y− y(2r− r2)]= (x2 + y2)− (x2 + y2)(2r− r2) = r2− r2(2r− r2) = r2(r−1)2
⇒ r = r(r−1)2.
θ =1r2 (xy− yx) =
1r2 [x
{x+ y− y(2r− r2)
}− y{
x− y− x(2r− r2)}]
⇒ θ =1r2 (x
2 + y2) = 1.
So, the fixed points are the origin r∗ = 0 and the limit cycle r∗ = 1. From here, you know thedrill!
3You know the drill!
96

2. TO SHOW:
r = r(1− r2)θ = 1
}⇔
{x = x− y− x(x2 + y2)y = x+ y− y(x2 + y2)
Piece of cake! From x = r cosθ and y = r sinθ:
x = r cosθ− rθsinθ = r(1− r2)cosθ− r sinθ = x(1− x2− y2)− y = x− y− x(x2 + y2),y = r sinθ+ rθcosθ = r(1− r2)sinθ+ r cosθ = y(1− x2− y2)+ x = x+ y− y(x2 + y2).
3. Given: x+ax(x2 + x2−1)+ x = 0, where a > 0,
(a) As a system of equations:
x = yy = −x−ay(x2 + y2−1).
The only fixed point is (x∗,y∗) = (0,0) and linearization gives
J(x,y) =
(0 1
−1−2axy −ax2−3ay2 +a
)⇒ J(0,0) =
(0 1−1 a
)
⇒ λ1,2 =12(a±
√a2−4),
⇒ if a = 0 then λ1,2 =±2i⇒ origin is a centre [can’t really happen since a > 0]
⇒ if |a|> 2 then a2−4 > 0⇒ origin is a saddle node⇒ if |a|= 2 then a2−4 = 0⇒ origin is a degenerate node⇒ if 0 < a < 2 then a2−4 < 0⇒ λ1,2 = α± iω⇒ origin is an unstable spiral.
[In general, if we didn’t know a priori that a > 0, we would have to consider all the abovepossibilities.]
(b) In polar coordinates:
rr = xx+ yy = xy+ y[−x−ay(x2 + y2−1)] =−ay2(x2 + y2−1)= −ar2 sin2
θ(r2−1)⇒ r =−ar(r2−1)sin2
θ.
Similarly,
r2θ = xy− yx =−(x2 + y2)−axy(x2 + y2−1)
= −r2−ar2 sinθcosθ(r2−1)
97

⇒ θ =−1+a(1− r2)sinθcosθ.
The fixed points are r∗ = 0 and the circle r∗ = 1. But just in case, lets check if there are reallyno attracting fixed points within. Now,
θ = 0⇒⇒ 1 = a(1− r2)sinθcosθ.
However, since a > 0, the right-hand-side of this equation cannot be equal to 1, that is, theleft-hand-side. Hence there are no fixed points, so by the Poincaré-Bendixson theorem, wemust have a limit cycle.To calculate the period, note that since we have r = 1 as our circle, then θ = −1, implyingthe flow is clockwise. Hence T = 2π.
(c) When r < 1⇒ r2− 1 < 0⇒ r > 0. Hence the trajectories spiral outward towards the limitcycle r = 1. When r > 1, r2−1 > 0⇒ r < 0. Hence the trajectories spiral inward towardsthe circle. The limit cycle is stable.
4. RULING OUT CLOSED ORBITS:
(a) Gradient system V (x) = x2 + y2:
(b) The criteria for a gradient system is that:∂x∂y
=∂y∂x
• ∂(2x)∂y
= 0 =∂(8y)
∂x: gradient system
• ∂
∂y(−2xex2+y2
) =−4xyex2+y2and
∂
∂x(−2yex2+y2
) =−4xyex2+y2,
so, again we have a gradient system. This rules out any possibility of a periodic orbit for thesystem.
(c) If V = ax2 + by2 is a Liapunov function, it must satisfy two conditions; (1) V (x) must bepositive definite, i.e. V (x) > 0 and (2) V (x) must be negative definite or semi-definite, i.e.V (x)≤ 0. So, as a starting point, assume a,b > 0 to satisfy condition (1). Next:
dVdt
= 2axx+2byy = 2ax(y− x3)+2by(−x− y3) = 2(a−b)xy−2(ax4 +by4).
Take, for example, a = b = 1, thendVdt
=−2(x4 + y4)< 0⇒ the derivative is negative defi-
nite. Hence V (x) = x2 + y2.NB: Any other choice of a and b such that a < b would be fine.
98

5. POINCARÉ-BENDIXSON THEOREM:
(a) Consider x = x− y− x(x2 +5y2), y = x+ y− y(x2 + y2).
(i) Linearization gives
J(x,y) =
(1−3x2−5y2 −1−10xy
1−2xy 1− x2−3y2
)⇒ J(0,0) =
(1 −11 1
)⇒ λ1,2 = 1± i,⇒ origin is an unstable spiral.
(ii) Polar coordinates:
rr = xx+ yy = (x2 + y2)− x2(x2 +5y2)− y2(x2 + y2)= (x2 + y2)− (x4 + y4)−6x2y2
r = −r(r2−1)−4r3 sin2θcos2
θ =−r(r2−1)− r3 sin2 2θ
= r− r3(1+ sin2 2θ)⇒ r = r− r3(2− cos2 2θ).
(iii) r < 0 when r−2r3 < 0⇒ r1 >1√2
.
(iv) r > 0 when r− r3 > 0⇒ r2 < 1.
(v) The trapping region is the annulus1√2< r < 1. Now consider θ (which you must find)
and then use the Poincaré-Bendixson theorem.
(b) We use rr = xx+ yy and r2θ = xy− yx:
rr = x2(1− x2−4y2)− xy(a+ x)+ y2(1− x2−4y2)+ xy(a+ x)r = r(1− x2−4y2) = r(1− r2[cos2
θ+4sin2θ]) = r(1− r2(1+3sin2
θ)).r2
θ = xy(1− x2−4y2)+ x2(a+ x)− yx(1− x2−4y2)+ y2(a+ x)= x2(a+ x)+ y2(a+ x) = r2(a+ x)
θ = a+ r cosθ.
So, for the system r = r(1−r2(1+3sin2θ)), θ = a+r cosθ, lets see if we can find a trapping
region,
(i) We first find a circle of maximum radius R1 such that the flow is radially outwards:
r = r(1− r2(1+3sin2θ))> r(1−4r2)> 0⇒ r < R1 =
12.
99

(ii) Next find a circle of minimum radius R2 centered at the origin so that the flow is radiallyinwards along the circle:
r = r(1− r2(1+3sin2θ))< r(1− r2)< 0⇒ r < R2 = 1.
The region12< r < 1 is the trapping region and we can only apply the Poincaré-Bendixson
theorem if there are no fixed points within this region. To find the location of the fixed points(if any), lets consider r = r(1− x2−4y2) = 0⇒ r∗ = 0 and 1 = x2 +4y2 which is an ellipse.And from θ= a+x = 0⇒ x∗=−a, which is a straight line. The fixed point is the intersectionof this line with the ellipse. Clearly, there is no intersection for |a|> 1 implying that there areno fixed points for |a| > 1. Hence by the Poincaré-Bendixson theorem there exists a closedorbit (its a lot harder to say anything about the case |a|< 1).
(c) Consider x = y+ax(1−2b−r2), y =−x+ay(1−r2) where a and b are parameters 0 < a≤1,0≤ b < 1 and r2 = x2 + y2.(i) You can proceed as in the previous examples using rr = xx + yy and r2θ = xy− yx.
Alternatively, in order to illustrate the use of complex numbers, let us proceed in thefollowing manner.Consider: x+ iy = reiθ = r(cosθ+ isinθ)⇒ x+ iy = (r+ irθ)eiθ, where i=
√−1. Now
add the first equation to the second multiplied by i, and combine with these results;
x+ iy = eiθ(r+ irθ) = y− ix+a(1− r2)(x+ iy)−2abx= −ireiθ +a(1− r2)reiθ−2abr cosθ
r+ irθ = −ir+a(1− r2)r−2abr cosθe−iθ
= −ir+a(1− r2)r−2abr cosθ(cosθ− isinθ).
Now separate real and imaginary parts to get
r = ar(1− r2−2bcos2θ), θ =−1+2abcosθsinθ.
[Try this with 3(b), 5(a) and 5(b)](ii) Construct a trapping region 0 < R1 < R2 by looking for R1 such that r(R1)> 0:
r = ar(1− r2−2bcos2θ) > ar(1− r2−2b2)> 0
1− r2 > 2b2
R1 =√
1−2b,
and R2 such that r(R2)< 0;
r = ar(1− r2−2bcos2θ) < ar(1− r2)< 0
1− r2 < 0R2 = 1.
Now check if there are any fixed points, θ∗ within the trapping region such that θ = 0 =−1+ abcosθ∗ sinθ∗. However, since a < 1 and b < 1, the right-hand-side cannot bezero, hence there are no fixed points.
(iii) If b = 0 then R1 = 1 = R2.
◦◦o 0 o◦◦
100