
Development of Curved-Plate Elements for the Exact ... Development of Curved-Plate Elements for the...
112
NASA / TM-1999-209512 Development of Curved-Plate Elements for the Exact Buckling Analysis of Composite Plate Assemblies Including Transverse- Shear Effects David M. McGowan Langley Research Center, Hampton, Virginia August 1999 https://ntrs.nasa.gov/search.jsp?R=19990069976 2018-07-16T07:23:26+00:00Z
Transcript of Development of Curved-Plate Elements for the Exact ... Development of Curved-Plate Elements for the...

NASA / TM-1999-209512
Development of Curved-Plate Elements for
the Exact Buckling Analysis of Composite
Plate Assemblies Including Transverse-Shear Effects
David M. McGowan
Langley Research Center, Hampton, Virginia
August 1999
https://ntrs.nasa.gov/search.jsp?R=19990069976 2018-07-16T07:23:26+00:00Z

The NASA STI Program Office ... in Profile
Since its founding, NASA has been dedicated tothe advancement of aeronautics and spacescience. The NASA Scientific and Technical
Information (STI) Program Office plays a keypart in helping NASA maintain this importantrole.
The NASA STI Program Office is operated byLangley Research Center, the lead center forNASA's scientific and technical information. The
NASA STI Program Office provides access to theNASA STI Database, the largest collection ofaeronautical and space science STI in the world.The Program Office is also NASA's institutionalmechanism for disseminating the results of itsresearch and development activities. Theseresults are published by NASA in the NASA STIReport Series, which includes the followingreport types:
TECHNICAL PUBLICATION. Reports ofcompleted research or a major significantphase of research that present the results ofNASA programs and include extensivedata or theoretical analysis. Includescompilations of significant scientific andtechnical data and information deemed to
be of continuing reference value. NASAcounterpart of peer-reviewed formalprofessional papers, but having lessstringent limitations on manuscript lengthand extent of graphic presentations.
TECHNICAL MEMORANDUM. Scientific
and technical findings that are preliminaryor of specialized interest, e.g., quick releasereports, working papers, andbibliographies that contain minimalannotation. Does not contain extensive
analysis.
CONTRACTOR REPORT. Scientific and
technical findings by NASA-sponsoredcontractors and grantees.
CONFERENCE PUBLICATION. Collected
papers from scientific and technicalconferences, symposia, seminars, or othermeetings sponsored or co-sponsored byNASA.
SPECIAL PUBLICATION. Scientific,technical, or historical information from
NASA programs, projects, and missions,often concerned with subjects havingsubstantial public interest.
TECHNICAL TRANSLATION. English-language translations of foreign scientificand technical material pertinent to NASA'smission.
Specialized services that complement the STIProgram Office's diverse offerings includecreating custom thesauri, building customizeddatabases, organizing and publishing researchresults ... even providing videos.
For more information about the NASA STI
Program Office, see the following:
• Access the NASA STI Program Home Pageat http'//www.sti.nasa.gov
• E-mail your question via the Internet [email protected]
• Fax your question to the NASA STI HelpDesk at (301) 621-0134
• Phone the NASA STI Help Desk at(301) 621-0390
Write to:
NASA STI Help DeskNASA Center for AeroSpace Information7121 Standard DriveHanover, MD 21076-1320

NASA/TM-1999-209512
Development of Curved-Plate Elements for
the Exact Buckling Analysis of Composite
Plate Assemblies Including Transverse-Shear Effects
David M. McGowan
Langley Research Center, Hampton, Virginia
National Aeronautics and
Space Administration
Langley Research CenterHampton, Virginia 23681-2199
August 1999

The use of trademarks or names of manufacturers in this report is for accurate reporting and does not constitute anofficial endorsement, either expressed or implied, of such products or manufacturers by the National Aeronautics
and Space Administration.
Available from:
NASA Center for AeroSpace Information (CASI)7121 Standard Drive
Hanover, MD 21076-1320
(301) 621-0390
National Technical Information Service (NTIS)5285 Port Royal Road
Springfield, VA 22161-2171(703) 605-6000

DEVELOPMENT OF CURVED-PLATE ELEMENTS FOR THE EXACT
BUCKLING ANALYSIS OF COMPOSITE PLATE ASSEMBLIES INCLUDING
TRANSVERSE-SHEAR EFFECTS
ABSTRACT
The analytical formulation of curved-plate non-linear equilibrium equations including
transverse-shear-deformation effects is presented. The formulation uses the principle of
virtual work. A unified set of non-linear strains that contains terms from both physical
and tensorial strain measures is used. Linearized, perturbed equilibrium equations
(stability equations) that describe the response of the plate just after buckling occurs are
then derived after the application of several simplifying assumptions. These equations
are then modified to allow the reference surface of the plate to be located at a distance zc
from the centroidal surface. The implementation of the new theory into the VICONOPT
exact buckling and vibration analysis and optimum design computer program is described
as well. The terms of the plate stiffness matrix using both classical plate theory (CPT)
and first-order shear-deformation plate theory (SDPT) are presented. The necessary steps
to include the effects of in-plane transverse and in-plane shear loads in the in-plane
stability equations are also outlined. Numerical results are presented using the newly
implemented capability. Comparisons of results for several example problems with
different loading states are made. Comparisons of analyses using both physical and
tensorial strain measures as well as CPT and SDPT are also made. Results comparing the
computational effort required by the new analysis to that of the analysis currently in the
VICONOPT program are presented. The effects of including terms related to in-plane
transverse and in-plane shear loadings in the in-plane stability equations are also
examined. Finally, results of a design-optimization study of two different cylindrical
shells subject to uniform axial compression are presented.

TABLE OF CONTENTS
ABSTRACT ....................................................................... i
TABLE OF CONTENTS ....................................................... ii
LIST OF TABLES .............................................................. iv
LIST OF SYMBOLS .......................................................... vii
CHAPTER I ..................................................................... 1
INTRODUCTION ................................................................................... 1
1.1 Purpose of Study ............................................................................ 1
1.2 Literature Review ........................................................................... 4
1.3 Scope of Study .............................................................................. 10
CHAPTER II ................................................................... 12
ANALYTICAL FORMULATION .............................................................. 12
2.1 Plate Geometry, Loadings, and Sign Conventions ..................................... 12
2.2 Strain-Displacement Relations ........................................................... 13
2.3 Equilibrium Equations ..................................................................... 16
2.4 Stability Equations ......................................................................... 19
2.5 Stability Equations Transformed to the Plate Reference Surface .................... 23
2.6 Constitutive Relations ..................................................................... 27
CHAPTER III .................................................................. 31
IMPLEMENTATION INTO VICONOPT ........................................... 31
3.1 Simplifications to the Theory .............................................................. 31
3.2 Continuity of Rotations at a Plate Junction ............................................. 32
ii

3.3 Derivation of the Curved-Plate Stiffness Matrix ....................................... 36
3.4 The Wittrick-Williams Eigenvalue Algorithm ......................................... 42
CHAPTER IV .................................................................. 44
NUMERICAL RESULTS ......................................................................... 44
4.1 Convergence of the Segmented-Plate Approach ....................................... 44
4.2 Buckling of Curved Plates With Widely Varying Curvatures ........................ 46
4.3 Buckling of an Unsymmetrically Laminated Curved Plate ........................... 48
4.4 Effect of N22 Terms in the In-Plane Stability Equations .............................. 49
4.5 Design Optimization of a Cylindrical Shell Subject to Uniaxial Compression .... 53
CHAPTER V ................................................................... 56
CONCLUDING REMARKS ..................................................................... 56
REFERENCES ................................................................. 59
APPENDIX A .................................................................. 63
MATRICES FOR DETERMINING CHARACTERISTIC ROOTS ........................ 63
ooo
111

Table 1.
Table 2.
Table 3.
Table 4.
Table 5.
Table 6.
Table 7.
Table 8.
Table 9.
Table 10.
Table 11.
Table 12.
LIST OF TABLES
Material properties for boron/epoxy plies and 2024 aluminum (SI units)•
Geometric parameters used to vary the curvature parameter, --b 2
R2t
Critical value of stress resultant Nil for buckling of a symmetricallylaminated long curved plate with clamped longitudinal edges.
Critical value of stress resultant N= for buckling of a symmetricallylaminated long curved plate with clamped longitudinal edges.
Critical value of stress resultant N12 for buckling of a symmetricallylaminated long curved plate with clamped longitudinal edges.
Critical value of stress resultant Nil = N= = N12 for buckling of asymmetrically laminated long curved plate with clamped longitudinaledges.
Critical value of stress resultant Nil for buckling of an unsymmetricallylaminated long curved plate with simply supported longitudinal edges.
Critical value of stress resultant N12 for buckling of an unsymmetricallylaminated long curved plate with simply supported longitudinal edges.
Material properties for aluminum and Korex tmhoneycomb core (Englishengineering units).
Critical value of hoop stress resultant N= for buckling of a long, isotropiccylinder subject to uniform external compression (results are in lbs/in.).
Design-optimization results for a honeycomb-sandwich cylinder subjected
to Nil loading•
Design-optimization results for a solid-wall cylinder subjected to Nilloading•
71
71
72
73
74
75
76
76
77
77
77
78
iv
LIST OF FIGURES
Figure 1.1..Typical longitudinally stiffened plate structures.
Figure 1.2 Segmented representation of curved-plate geometry currently used byVICONOPT.
Figure 2.1 Curved-plate geometry and sign convention for buckling displacements,rotations, moments, and forces.
Figure 2.2 Sign convention for applied in-plane loads and relation of referencesurface to centroidal surface.
Figure 2.3 Curved-laminate geometry.
Figure 3.1 Displacements and rotations at a typical plate junction.
Figure 4.1 Long isotropic (aluminum) cylinder subjected to uniaxial compression.
Figure 4.2 Convergence of VICONOPT segmented-plate results as a function of thenumber of segments used in the approximation.
Figure 4.3 Normalized CPU time requirements for the segmented-plate approachas a function of the number of segments used in the approximation.
Figure 4.4 Positive applied in-plane loads on a long curved plate.
Figure 4.5 Symmetrically laminated long curved plate with clamped longitudinaledges subjected to applied in-plane loads.
Figure 4.6 Critical value of stress resultant Nil for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
Figure 4.7 Critical value of stress resultant N= for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
Figure 4.8 Critical value of stress resultant N12 for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
Figure 4.9 Critical value of stress resultants Nil = N= = N12 for buckling of asymmetrically laminated curved plate with clamped longitudinal edges.
Figure 4.10 Unsymmetrically laminated aluminum and boron/epoxy (B/E) curvedplate with simply supported edges subjected to applied in-plane loads.
Figure 4.11 Critical value of stress resultant Nil for buckling of an unsymmetricallylaminated aluminum and boron/epoxy (B/E) curved plate with simplysupported longitudinal edges.
Figure 4.12 Critical value of stress resultant N12 for buckling of an unsymmetricallylaminated aluminum and boron/epoxy (B/E) curved plate withsupported longitudinal edges.
79
79
80
81
82
83
84
85
86
87
87
88
89
90
91
92
93
94
V

Figure 4.13 Isotropic (aluminum) long cylindrical tube subjected to uniform externalpressure loading. 95
Figure 4.14 Cylindrical shell subjected to uniform axial compression (Nll loading). 96
Figure 4.15 Optimized cylinder mass as a function of the applied loading for acylindrical shell. 97
vi

A
a
B
B, C, E,
F, G, H
b
b
C
C
D
d
ds
ds*
gii
E
F
f
f,
612
G13, G23
h_j
LIST OF SYMBOLS
extensional stiffness matrix
upper half of the eigenvectors of matrix R, associated
coupling stiffness matrix
with displacements
coefficients used to select physical or tensor strains
lower half of the eigenvectors of matrix R, associated with forces
plate width (arc length)
matrix whose columns contain the eigenvectors of matrix R
single eigenvector of matrix R
bending stiffness matrix
vector of displacement amplitudes at the two edges of a plate
arc length of a line element in a body before deformation
arc length of a line element in a body after deformation
Young's modulus in the i-i direction
matrix used to define vector d, see Eq. (3.19)
matrix used to define vector f, see Eq. (3.20)
vector of force amplitudes at the two edges of a plate
body forces
in-plane shear stiffness
transverse shear stiffnesses
coefficient of the partially inverted constitutive relations, see Eqs. (3.11) and
(3.12)
identity matrix
moment of inertia
imaginary number, square root of -1
vii

K
k
M11, M=, M12
mll, m22, m12
lil 11, li122, li112
N11, N22, N12
n11, n22, n12
1_11,1_22,1_12
fi22' ill2
n l
P
P
P2, P3
Q
Q
Q1, Q2
ql, q2,
ql,q2
R
Ri,R2
plate stiffness matrix
transverse-shear compliance matrix
applied (prebuckling) moment resultants
perturbation values of moment resultants just after buckling has occurred
moment resultants
applied (prebuckling) stress resultants
perturbation values of stress resultants just after buckling has occurred
stress resultants
effective forces per unit length at an edge _2 = constant
number of layers in a general curved laminate
coefficient matrix of the set of first-order plate differential equations,
see Eq. (3.14)
applied external pressure
perturbation values of the applied pressure load in the buckled state in
the _2- and _3-directions
lamina reduced stiffness matrix
lamina reduced transformed stiffness matrix
applied (prebuckling) shear stress resultants
perturbation values of shear stress resultants just after buckling has
occurred
shear stress resultants
effective transverse shear force per unit length at an edge _2 = constant
matrix whose eigenvalues are the characteristic roots of the plate
differential equations, see Eq. (3.16b)
radii of lines of principal curvature
oooVlll

T
T i
t
U1, U2
U 1 , U 2
V
W
Z
Z c
Z k
coefficient matrix of the set of first-order plate differential equations, see Eq.
(3.14)
surface tractions
plate thickness
prebuckling displacements
perturbation values of displacements just after buckling has occurred
volume
normal displacement in the _3-direction
vector of the forces and displacements in the plate
vector containing the amplitudes of the forces and displacements in the plate
assuming a sinusoidal variation in the _l-direction
distance from the plate centroidal surface to the plate reference surface
distance from laminate reference surface to the kth layer in the laminate
Greek
1_1' 1_2
Ell, E22
El2, _t12
El3, _t13
E23, _t23
1' *2
Lam6 parameters
angle included by a curved plate
vector containing strains Ell , E22 , and _t12
in-plane direct strains
in-plane shear strains
transverse shear strains
transverse shear strains
rotations
ix

9. rotation about the normal to the plate middle surface
1_11, 1_22 middle surface changes in curvatures
1_12 middle surface twisting curvature
half wavelength of buckling mode
v Poisson's ratio
O k
P
angular orientation of ply k in a laminate with respect to the laminate
coordinate system
density
0 vector containing stresses 011 , (J22' and _12
0"11, 022 in-plane direct stresses
"_12 in-plane shear stress
_1' _2' _3 coordinate measures in the 1-, 2-, and 3-directions, respectively
Subscripts
cr
k
n
1,2,3
o
and Superscripts
critical value for buckling
kth layer in a laminated composite plate
normal to middle surface
1-, 2-, and 3-directions, respectively
value at centroidal surface
x

CHAPTER I
INTRODUCTION
1.1 Purpose of Study
Longitudinally stiffened plate structures occur frequently in aerospace vehicle
structures. These structures can typically be represented by long, thin, fiat or curved
plates that are rigidly connected along their longitudinal edges, see Figure 1.1. The
designs for these structures often exploit the increased structural efficiency that can be
obtained by the use of advanced composite materials. Therefore, the plates used to
represent the structure may consist of anisotropic laminates. The buckling and vibration
behavior of this type of structure must be understood to design the structure.
Additionally, to satisfy the current demands for more cost-effective and structurally
efficient aerospace vehicles, these structures are frequently optimized to obtain an
optimal design that satisfies either buckling or vibration constraints or a combination of
these two constraints. There is a need for analytical tools that can provide the analysis
capability required to optimize panel designs.
The VICONOPT computer code [1] is an exact analysis and optimum design
program that includes the buckling and vibration analyses of prismatic assemblies of fiat,
in-plane-loaded anisotropic plates. The code also includes approximations for curved and
tapered plates, discrete supports, and transverse stiffeners. Anisotropic composite
laminates having fully populated A, B and D stiffness matrices may be analyzed. Either
classical plate theory (CPT) or first-order transverse-shear-deformation plate theory
(SDPT) may be used [2]. The analyses of the plate assemblies assume a sinusoidal
response along the plate length. The analysis used in the code is referred to as "exact"

because it uses stiffness matrices that result from the exact solution to the differential
equations that describe the behavior of the plates.
Currently, VICONOPT approximates a curved plate by subdividing it into a series of
flat-plate segments that are joined along their longitudinal edges to form the complete
curved-plate structure, see Figure 1.2. This procedure is analogous to the discretization
approach used in finite element analysis. The code uses exact stiffnesses for the flat-plate
segments and enforces continuity of displacements and rotations at the segment
connections. Thus, the analyst must ensure that an adequate number of flat-plate
segments is used in the analysis. The next logical step in the development of the
VICONOPT code is to eliminate the need to approximate curved-plate geometries by
flat-plate segments by adding the capability to analyze curved-plate segments exactly.
By adding this capability, the accuracy of the solutions can be improved. Furthermore,
since the curvature of a plate is modeled directly, there will be no need to determine if a
sufficient amount of flat-plate segments have been used to model the curved plate.
Another benefit of adding this capability is that the computational efficiency of the code
will be improved since only one stiffness calculation for the entire curved plate is
required, rather than the several that are currently required for the individual flat plates
that are used to approximate the curved plate. This improvement in computational
efficiency is important for structural optimization. In this report, the capability to analyze
curved-plate segments exactly has been added to the VICONOPT code. The present
report will describe the methodology used to accomplish this enhancement of the code
and will present results obtained utilizing this new capability.
The procedure used in the present report is an extension of the procedure described in
[2]. This procedure involves deriving the appropriate differential equations of
equilibrium for the analysis of fully anisotropic curved plates, including transverse-shear-
deformation effects. These coupled equations are of eighth-order if transverse-shear
effects are neglected, and of tenth-order if transverse-shear effects are included. For the
2

analysisof flat plates, the coupling of theseequationsoccurs through the laminate
extension-bending B matrix; however,coupling can also be producedby including
curvaturetermsin theequilibrium equations.Thenumericalsolution techniquethat was
developedin [2] to solvesuchsystemsof equationswill apply for eithertypeof coupling,
and the stiffnessesof the plates are derived from the numerical solution to these
equations.
Several featureshave beenaddedto the VICONOPT code as part of the present
report. Thecurrent versionof VICONOPTonly analyzesflat-plateelementsbasedon a
tensorial strain-displacementrelation. However, the choice of strain-displacement
relationscanaffect thecontributionof prebucklingforcesin curvedplates. Therefore,a
unified set of nonlinear strain-displacementrelations that contains terms from both
physicaland tensorialstrainmeasuresis usedto derive theplate equilibrium equations.
Theunified setof strainsis usedthroughoutthederivationof theequilibrium equations,
and the selectionof either physical or tensorial strains is achievedby appropriately
settingcoefficientsin theequilibrium equationsequalto oneor zero. Theoption to use
physical strain-displacementrelations for the analysisof flat platesis includedaswell.
Anotheradditionis the treatmentof theeffectsof in-planetransverseandin-planeshear
loadingsin the in-planeequilibrium equations.Theseeffectsarecurrentlyignoredin the
VICONOPTcode(see[1]). In thepresentreport,anin-planetransverseloading,denoted
N=, is a loading that acts perpendicularto the longitudinal edgesof the plate. The
presentstudyhasaddedtheoptionto includetheeffectsof theseloadingsin the in-plane
equilibrium equations. Finally, either CPT or SDPT may beused. The SDPTusedin
VICONOPT andin the presentreport usestheusual first-orderassumptionthat straight
lines originally normal to the centroidal surfaceare assumedto remain straight and
inextensionalbut not necessarilynormal to the centroidalsurfaceduring deformationof
the plate. All of thesefeatureshavebeenimplementedsuchthat they areavailablefor
usein theanalysisof bothflat andcurvedplates.

1.2 Literature Review
The buckling and vibration analysis of assemblies of prismatic plates has received a
great deal of attention over the last thirty years. One method of analysis for this class of
structure that has been studied extensively is the finite-strip method, FSM [3]. A popular
application of this method involves determining a stiffness matrix for each individual
plate in the assembly and then assembling those individual matrices into a global stiffness
matrix for use in determining the response of the entire structure. This method is
therefore analogous in form to the finite element method [4]. The main difference
between the two methods is that the finite element method discretizes the individual
plates into elements in both the longitudinal and transverse directions. The stiffness
matrix for each individual element is then calculated and assembled into a global stiffness
matrix. In the FSM, the response of the plate in the longitudinal direction is represented
as a continuously differentiable smooth series that satisfies the boundary conditions at the
two ends of the plate. Therefore, discretization of the structure is only required to be
performed in the transverse direction, and depending on the method being used,
discretization of the individual plates may or may not be required [3].
The work in the area of finite strip analysis of assemblies of prismatic plates may be
broadly classified based upon different characteristics of the analysis method used. One
classification distinguishes whether the properties of the individual plates are derived by
direct solution to the equations of equilibrium or by application of potential energy or
virtual work principles, i.e., exact versus approximate methods. Another classification
distinguishes whether classical plate theory (CPT) or first-order shear-deformation plate
theory (SDPT) is used in the analysis. Finally, a distinction may be made as to whether
or not complex quantities are used in the development of the individual stiffness matrices.
A review of the literature in the area of finite strip analysis methods is presented below.
Approximate methods are discussed separately from exact methods.
4

The approximate FSM was first proposed for the static analysis of plate bending by
Cheung in 1968 [5]. The approximate FSM involves subdividing each plate into a series
of finite-width strips that are linked together at their longitudinal edges in a manner
similar to that depicted in Figure 1.2. Separate expressions for in-plane and out-of-plane
displacements as well as rotations about the in-plane x and y axes over the middle surface
of each strip are assumed. Each of these fundamental quantities are expressed as a
summation of the products of longitudinal series and transverse polynomials [3]. The
longitudinal series are typically sinusoidal and are selected to satisfy displacement
conditions at the transverse edges of each strip that match the desired plate boundary
conditions along those edges. The potential energy of an individual finite strip is then
evaluated, and the total potential energy of the plate is obtained by summing the potential
energies of the individual strips. Following the application of any appropriate zero-
displacement boundary conditions at the longitudinal edges, the potential energy is
minimized with respect to each plate degree of freedom to generate the equilibrium
equations for the plate. Displacements are then calculated for a given loading condition
using this system of equations.
The analysis of [5] utilized CPT for the static bending analysis of isotropic plates. In
1971, Cheung and Cheung [6] applied the approximate FSM to the analysis of natural
vibrations of thin, fiat-walled structures with different combinations of the standard edge
boundary conditions (i.e., clamped, simply supported, or free). Their analysis was based
upon CPT and the displacements in the longitudinal direction were approximated using
the normal modes of Timoshenko beam theory to allow for various boundary conditions
on the transverse edges.
Przemieniecki [7] used an approximate FSM based upon CPT to calculate the initial
buckling of assemblies of flat plates subjected to a biaxial stress state. This method only
considered local buckling modes since it assumed that the line junctions between plates
remained straight during buckling. Plank and Wittrick [8] extended the work of

Przemienieckiby consideringglobal as well as local modesand by admitting a more
generalloadingstatethat includeduniform transverseandlongitudinal shearstressand
longitudinaldirect stressthatvarieslinearly acrossthewidth of theplate. Whenin-plane
shearloadingis present,a spatialphasedifferenceoccursbetweentheperturbationforces
anddisplacementswhich occurat the edgesof the platesduring buckling. This phase
differencecausesskewingof thenodal lines andis accountedfor in [8] by defining the
magnitudeof thesequantitiesusingcomplexquantities. This methodis referredto asa
complexfinite stripmethod.
In 1977,Dawe [9 and 10]usedanapproximateFSM baseduponCPT for the static
and linear buckling analysis of curved-plate assemblies. The plates studied were
isotropic, and in-plane shearloadswere not allowed. Morris and Dawe extendedthis
analysisto studythefreevibrationof curved-plateassembliesin 1980[11].
All of the analysesdiscussedthusfar havebeenbaseduponCPT. In 1978,Dawe
[12] presentedanapproximateFSM baseduponSDPT [13] for thevibration of isotropic
plates with a pair of oppositeedgessimply supported. Roufaeil and Dawe [14] and
Dawe and Roufaeil [15] extended this analysis to the vibration and buckling,
respectively, of isotropic and transversely isotropic plates with general boundary
conditions.Thelatter two analysesadmittedthegeneralboundaryconditionsthroughthe
useof thenormalmodesof Timoshenkobeamtheory,aswasdonein [6].
In 1986, Craig and Dawe [16] consideredthe vibration of single symmetrically
laminatedplatesusing an approximateFSM basedupon SDPT. Daweand Craig [17]
thenextendedthis analysisto studythebuckling of singlesymmetricallylaminatedplates
subject to uniform shearstressand direct in-plane stress. This analysisallowed for
anisotropicmaterialproperties. Generalboundaryconditionswereonceagainadmitted
throughthe useof the normalmodesof Timoshenkobeamtheory. Theanalysisof [17]
wasextendedin 1987to the vibration of completeplateassemblies[18]. However, it
was shown in this work that the problem size increaseddramatically as attemptsto
6

increasetheaccuracyof thesolutionweremadeby further subdivisionof thecomponent
plates.
In 1988, Dawe and Craig [19] presented a complex FSM based upon SDPT for the
buckling and vibration of prismatic plate structures in which the component plates could
consist of anisotropic laminates and could be subject to in-plane shear loads. This work
also made use of substructuring to create "superstrips" that eliminated the internal
degrees-of-freedom from each component plate. This analysis was later extended to
consider finite-length structures [20 and 21] and to add multi-level substructuring to
couple several "superstrips" to further decrease the problem size. Dawe and Peshkam
[22] also developed a complementary analysis to that presented in [20 and 21] for long
plate structures. Analyses using both SDPT and CPT were presented. This work also
added the capability to define eccentric connections of component plates.
Wittrick laid the groundwork for the exact FSM in 1968 [23]. The basic assumption
in this work is that the deformation of any component plate varies sinusoidally in the
longitudinal direction. Using this assumption, a stiffness matrix may be derived that
relates the amplitudes of the edge forces and moments to the corresponding edge
displacements and rotations for a single component plate. For the exact FSM, this
stiffness matrix is derived directly from the equations of equilibrium that describe the
behavior of the plate. In [23], Wittrick developed an exact stiffness matrix for a single
isotropic, long fiat plate subject to uniform axial compression. His analysis used CPT.
Wittrick and Curzon [24] extended this analysis to account for the spatial phase
difference between the perturbation forces and displacements which occur at the edges of
the plate during buckling due to the presence of in-plane shear loading. This phase
difference is accounted for by defining the magnitude of these quantities using complex
quantities. Wittrick [25] then extended his analysis to consider fiat isotropic plates under
any general state of stress that remains uniform in the longitudinal direction (i.e.,
combinations of bi-axial direct stress and in-plane shear). A method very similar to that
7

describedin [23] waspresentedby Smith in 1968 [26] for the bending,buckling, and
vibrationof plate-beamstructures.
In 1972,Williams [27] presentedtwo computerprograms,GASVIP and VIPAL to
computethe naturalfrequenciesandinitial buckling stressof prismaticplateassemblies
subjected to uniform longitudinal stress or uniform longitudinal compression,
respectively. GASVIP wasusedto set up the overall stiffnessmatrix for the structure,
andVIPAL demonstratedtheuseof substructuring.In 1974,Wittrick andWilliams [28]
first reportedon theVIPASA computercodefor thebuckling andvibration analysesof
prismaticplateassemblies.This codeallowedfor isotropicor anisotropicplatesaswell
asa generalstateof stress(including in-planeshear).The complexstiffnessesdescribed
in [8] were incorporated, as well as allowances for eccentric connectionsbetween
componentplates. This codealsoincorporatedanalgorithm,referredto asthe Wittrick-
Williams algorithm,for determininganynaturalfrequencyor buckling loadfor anygiven
wavelength[29]. The developmentof thisalgorithmwasnecessarybecausethecomplex
stiffnessesdescribed aboveare transcendentalfunctions of the load factor and half
wavelength of the buckling modes of the structure. The eigenvalue problem for
determiningnatural frequenciesand buckling load factors is therefore transcendental.
Furtherdiscussionof theWittrick-Williams algorithmwill bepresentedin ChapterIII.
In 1973,ViswanathanandTamekuni[30 and31] presentedanexactFSMbasedupon
CPTfor theelasticstability analysisof compositestiffenedstructuressubjectedto biaxial
inplaneloads. The structureis idealizedasan assemblageof laminatedplateelements
(flat or curved)andbeamelements.Theanalysisassumesthat thecomponentplatesare
orthotropic. The transverseedges are assumedto be simply supported, and any
combinationof boundaryconditions may be applied to the longitudinal edges. The
analysiswas included in an associatedcomputer code, BUCLAP2. Viswananthan,
Tamekuni, and Baker extendedthis analysis in [32] to consider long curved plates
subjectto anygeneralstateof stress,including in-planeshearloads. Anisotropicmaterial

propertieswerealso allowed. This analysisutilized complexstiffnessesasdescribedin
[8]. Theanalysesdescribedin [26, 28, and32] arevery similar. Thedifferencesbetween
thethreearediscussedin [28].
When applied in-plane shearloadsor anisotropy is present,the assumptionof a
sinusoidal variation of deformation in the longitudinal direction is only exact for
structuresthat are infinitely long. Significanterrors for structuresof finite length can
occurdueto the skewingof nodal lines. In 1983,Williams andAnderson[33] presented
modificationsto theeigenvaluealgorithmdescribedin [29]. Themodificationspresented
in [33] allowedthe buckling modecorrespondingto a generalloading to be represented
asa seriesof sinusoidalmodesin combinationwith Lagrangianmultipliersto applypoint
constraintsat any locationon thoseedges. Eachsinusoidalmodeis representedby an
exact stiffness matrix. This techniqueallows infinitely long structuressupportedat
repeatingintervalswith anisotropyor appliedin-planeshearloadsto beanalyzed.Thus,
a panel supportedat its transverseedgesis approximatedby one with a seriesof point
supportsalongthoseedges.Thesemodificationsformedthebasisfor thecomputercode
VICON (VIpasawith CONstraints)describedin [34]. However,theanalysiscapability
of VICON waslimited to platesanalyzedwith CPThavinga zeroB matrix. TheVICON
codewaslatermodified to includestructuressupportedby Winkler foundations[35]. An
optimum design feature was also addedin 1990 [36 and 37], and the VICONOPT
(VICON with OPTimization)codewasintroduced.
Anderson and Kennedy [2] incorporated SDPT into VICONOPT in 1993. A
numericalapproachto obtainexactplatestiffnessesthatincludetheeffectsof transverse-
sheardeformationwaspresented.The generalityof VICONOPTwasalso expandedin
[2] to allow for the analysisof laminateswith fully populatedA, B, and D stiffness
matrices.
9

1.3 Scope of Study
The analytical formulation of the curved-plate non-linear equilibrium equations
including transverse-shear-deformation effects are presented in Chapter II. A unified set
of non-linear strains that contains terms from both physical and tensorial strain measures
is used. The equilibrium equations are derived using the principle of virtual work
following the method presented by Sanders [38 and 39]. Linearized, perturbed
equilibrium equations that describe the response of the plate just after buckling occurs are
then derived after the application of several simplifying assumptions. Modifications to
these equations that allow the reference surface of the plate to be located at a distance z_
from the centroidal surface are then made.
In Chapter III, the implementation of the new theory into the VICONOPT code is
described. A derivation of the terms of the plate stiffness matrix using MATHEMATICA
[40] is presented. The form of these terms for both CPT and SDPT is discussed. The
necessary steps to include the effects of in-plane transverse and in-plane shear loads in
the in-plane equilibrium equations are also outlined.
In Chapter IV, numerical results are presented using the newly implemented
capability. A convergence study using the current segmented-plate approach in
VICONOPT is performed for a simple example problem to obtain baseline results for use
in future comparisons. Results comparing the computational effort required by the new
analysis to that of the analysis currently in the VICONOPT program are also presented.
Comparisons of results for several example problems with different loading states are
then made. Comparisons of analyses using both physical and tensorial strain measures as
well as CPT and SDPT are made. The effects of including terms related to in-plane
transverse and in-plane shear loads in the in-plane stability equations are also examined.
In Chapter V, the characteristics of the newly implemented curved-plate elements in
VICONOPT is presented. A brief summary of the effects of several analytical features
10

that have been implemented into VICONOPT is given. Finally, potential future work in
this area is discussed.
11

CHAPTER II
ANALYTICAL FORMULATION
In this chapter, the non-linear equilibrium equations are derived for a curved plate
including transverse-shear effects. A unified set of non-linear strains that contain terms
from both physical and tensorial strain measures is used. The equilibrium equations are
derived using the principle of virtual work following the method presented by Sanders
[38 and 39]. Linearized stability equations that describe the response of the plate just
after buckling occurs are then derived following the application of several simplifying
assumptions. Modifications to these equations that allow the reference surface of the
plate to be located at a distance z¢ from the centroidal surface are then made.
2.1 Plate Geometry, Loadings, and Sign Conventions
The geometry of the basic plate element being studied is given in Figure 2.1. This
figure depicts the orthogonal curvilinear coordinate system (_1, _2, _3) used in the present
analysis. The _1- and _2-axes shown in the figure are along lines of principal curvature
and they have radii of curvature R_ and R2, respectively. The _2-axis is normal to the
middle surface of the plate. The first fundamental form of the plate middle surface is
given by
2 2ds 2 = ct2d_ 2 +ct2d_2 (2.1)
where ct I and ct 2 are the Lam6 parameters. The coordinates _1 and _2 are measured as arc
lengths along the _- and _2-axes, respectively. The result of measuring the coordinates
12

in this manneris that % = c_2,= 1. The sign conventionsfor buckling displacements,
moments,rotations,andforcesarealsoshownin Figure2.1. Thesignconventionfor the
appliedin-planeloadingsbeingconsideredandtherelationof thereferencesurfaceof the
plate to the centroidal surfaceof the plate are shownin Figure 2.2. Note that that
centroidal surfacecan be offset from the referencesurfaceby a distancezc. The
centroidalsurfaceis definedto be locatedat thecentroidof thefaceof the panelthat is
normal to the _i-axis. Theloading N= shownin this figure is referredto in thepresent
reportasanin-planetransverseloading.
2.2 Strain-Displacement Relations
The nonlinear strain-displacement relations used for the present study are given by
_11 = Ul,1 +- w_ [wu_ 12o2c[ w]2R 1 +2 'I-R 1J +-2 -u2'1+2 ul'l+_-I(2.2a)
E22 = u2,2 +-
2 2
u<E1, <+- - +-u_ += +R 2 2
(2.2b)
2E12 = 712 = Ul,2 +u2,1 +w,1 w,2-w,1---u2 Ul UlU2
w,2 -- + --R2 R1 R1R2
[ w-- + u2,1-G Ul,2U2, 2 + u2,1Ul, 1 + Ul, 2 R2
[ w-- + u2,1+__HUl,2Ul, 1 + u2,1u2, 2 + Ul, 2 R1
(2.2c)
Ul2E13 =713 =w,1----91
R1(2.2d)
13

2_323= Y23= w,2 ----U2 _)2 (2.2e)R2
0u iwhere the following notation for partial derivatives is used: -ui, j. The
0_j
displacement quantities in Eqs. (2.2a) through (2.2e) are displacements of the centroidal
surface of the plate. The constants B, C, E, F, and H are set equal to one and G is set
equal to zero in Eqs. (2.2a) through (2.2e) to use tensorial strain measures. The constants
B, E, and G are set equal to one and C, F, and H are set equal to zero to use physical
strain measures. Note that the linear portions of the tensorial and physical strain
measures are identical. To obtain Donnell theory from the strain-displacement relations
in Eqs. (2.2a) through (2.2e) the constants B, C, E, F, G, and H must be set equal to zero,
and all terms involving the quantities U--L and u---L2must be neglected. Sander's theoryR1 R2
[39] may be obtained by setting the constants B, C, E, F, G, and H equal to zero and
adding the term 1 2_-_n to Eqs. (2.2a) and (2.2b), where % is the rotation about the normal
to the plate middle surface.
The tensorial strain measures used in the present study are those of Novozhilov [41].
These strains are obtained by taking the difference between the square of the arc length of
a line element in a body after deformation, (ds*) 2, and before deformation (ds) 2. The
tensorial strain measures, _jk, are defined by the relationship
1 [(ds*) 2 -(ds)2] = ejkd_jd_k i,j = 1, 3 (2.3)
The repeated indices in Eq. (2.3) indicate summation over i and j. The physical strain
measures are strains that can be measured in the laboratory. The physical strains used in
14

thepresentreport arederivedin a mannersimilar to that presentedby Steinin [42] and
theywerecommunicatedto theauthorin linesof curvaturecoordinatesby Dr. MichaelP.
Nemeth.1. Physicalextensionalstrainsaredefinedastheratioof thechangein arc length
of a line elementin abody,ds*,to theoriginal lengthof that line element,ds,
(ds*)j - (ds)j
I;jj = (ds)j j = 1,2 (no summation) (2.4a)
Physical shearing strains are defined as the change in the angles between three line
elements that are orthogonal before deformation and are oriented in the direction of three
unit vectors, _, after deformation. The physical shearing strains are defined by the
following expressions
) ^_ ^_sin )' 12 _ )' 12 = el "e2 (2.4b)
sin y j3 = )' j3 = e_ "e3 J = 1,2 (2.4c)
The definitions for the changes in curvatures of the centroidal surface used for both
theories are
_:11 = -_1,1 (2.5a)
K22 = -_)2,2 (2.5b)
_:12 = -('1,2 + '2,1) (2.5c)
These changes in curvatures are equivalent to those given by Sanders in [39] with the
terms involving rotations about the normal neglected.
1 Mechanics and Durability Branch, Structures and Materials, NASA Langley Research Center, Hampton, VA,
15

2.3 Equilibrium Equations
The nonlinear equilibrium equations for the curved plate illustrated in Figures 2.1 and
2.2 are derived using the principle of virtual work [43]. This principle states that, if a
structure in equilibrium is subject to a virtual distortion while remaining in equilibrium,
then the external virtual work done by the external forces on the structure is equal to the
internal virtual work done by the internal stresses. The principle of virtual work can
therefore be written in the form
fTi&uids + ffi&uidv = foij&e ijdv (2.6)surface volume volume
The present derivation uses the principle of virtual work in the manner of Sanders [38]
written in the following form
[fi11&_11 +fi22&;22 +2ill2&;12 +In11&_11 ]d_ld_ 2ff [+1_122i_1_22 + 21T112i_1_12 + qli_Y13 + q2i_Y23area
+f[Nll&U 1 + N126u 2 + Q16w - Ml16_) 1 - M126_)2]d_2C
-J;[N12&u 1 + N226u 2 + Q26w - M126_) 1 - M226_)2 _1_1C
= 0
(2.7)
The terms ]_12 and 1_12 are effective stress measures as defined by Sanders in [38]. The
terms ql and q2 are also effective stress measures as defined by Cohen in [44]. The
uppercase terms in Eq. (2.7) are applied loadings on the boundary of the plate.
Substituting Eqs. (2.2a) through (2.2e) and Eqs. (2.5a) through (2.5c) into Eq. (2.7)
and integrating by parts results in
16

I ( ) u2) 1f +_11 Ul +_l_(w -_ R1ff-[ fill,1 + fi12,2 w,1 - + --area ',L R1 Rll R1 _ ,2
W
+ [fi12u2,1],lJ
{u1,1+[ ) Ul) 2+ u2 n12 [w -_-1 R2_=_w, -_ R__ ,1 +--+ ill2,1 + fi22,2 --R-T2_ 2 +
+ [fi12Ul,2],2J
+[l Ul/] - 111w+/+_1_w,1-_11,_+ _-T_11u1,1
R2 R2 u2'2 + Gill2 +k R2 R1 )
(Ul,_+U_,l]law-_12 k R1 R2 ) J
17

+ Nll +fill +Cfill Ul,1+ -Gfil2U2,1 +Hfil2Ul,2 i_Ul
+[N12 +ill2 + BfillU2,1- afil2(Ul,1 +_-1)+_Hfil2( u2'2 +-_2)] _u2
+[o1+o1+ 111w,1+
-[Mll + 1TIll ]i_) 1 -[M12 + 1T112]6* 2 Jd_2
+ N12 + ill2 + Efi22Ul,2 - Gill2 u2,2 + + Hill2 Ul,1 + &Ul
[ w) ]+ N22 + fi22 +-Ffi22 u2,2 + R2 - G---fil2Ul'2 + Hfil2U2'l 6u2
-[m12 + l'n12 ]&*l -[M22 + Ih22 ]&*2)d_l = 0 (2.8)
For arbitrary displacements Ul, u2, w, ql, and q2, the coefficients of the displacements in
the area integral in Eq. (2.8) are the five equilibrium equations. The coefficients of the
displacement variables in the first line integral in Eq. (2.8) are the natural boundary
18

conditionsfor anedge_1= constant,andthecoefficientsof thedisplacementvariablesin
thesecondline integralarethenaturalboundaryconditionsfor anedge_2= constant.
2.4 Stability Equations
A set of perturbation equilibrium equations that govern the stability of the plate,
referred to herein as the stability equations, may now be written by taking the difference
between the equilibrium equations evaluated for an equilibrium state just prior to
buckling and an adjacent (perturbed) equilibrium state just after buckling has occurred.
Let the prebuckling state be represented by:
fill =-Nll, fi22 =-N22, ill2 =-N12, liall =-Mll,
frizz =-M22, ffll2 =-M12, ql =-Q1, q2 =-Q2,
u1, u2, w
(2.9)
The minus signs in the loading terms reflect the sign convention used in which the
applied loads are opposite in direction to the loads that develop after buckling. Let the
perturbed state just after buckling has occurred be represented by:
fill =nll -Nil, fi22 =n22-N22, ill2 =n12-N12,
roll =mll -Mll, ff122 =m22-M22, fill2 =m12-M12,
ql =ql-Q1, q2 =qz-Q2, Ul +U1, u2 +U2, w+W
(2.10)
where the lower case variables are perturbation variables. Taking the difference between
the two equilibrium states represented by Eqs. (2.9) and (2.10), linearizing the resulting
equations for the perturbation variables, and applying the following simplifying
assumptions:
l) Prebuckling deformations, moments, and transverse-shear stresses are
19
2)
negligible
The in-plane prebuckling stress state is uniform
yields the following stability equations:
nll,1 + n12,2 +ql Nll u_ _N__w
w,_-g _ /,_R1 R1
-_HN12(_12 +2u1,12) =0
(2.1 la)
+ n22, 2 + q2 N22 (n12,1R2 R2 w,2__2) _ N12 { w Ul
+ u 1,11 + u 1,22-__BNllU2,11 _ K2 _ R1
-HN12( w'l +2u2,12 ) = 0-- _R 2
(2.1 l b)
( _u1,1) ( _u2,1)rill n22 N11 W,ll -N12 w,21ql,1 + q2,2 R1 R2 R1 ) R2 )
( ( u22 cNll w+)_Ul,2]_N22 w,22_ +_ li __ Ul,1-N12 w,12 R1 ) R2 ) R1 _R1
w ) _, /u2,1 Ul,2 ]+ FN 22 (__ + u 2,2 +
R2 k R2 -_1"112(--_- 1 R2 ,/
+" {Ul'2 + U2'l] = 0I-tIN 12 _ R1 R2 )
(2.1 lc)
roll,1 + m12,2 -ql = 0
m12,1 + m22,2 - q2 = 0
(2.1 l d)
(2.11e)
The boundary conditions for an edge _1 = constant are
20

iSU 1 = 0
or
nll-CNll( ul'l +_1) + GN12u2,1 - HN12Ul, 2 = 0
i_U 2 = 0
or
n12--NllU2'l + GN12( ul'l +_-1)- _HN12( u2'2
iSw = 0
or
1- 11Iw1+U1 - 1 (=0
=0
(2.12a)
(2.12b)
(2.12c)
_)1 = 0 or mll = 0 (2.12d)
_)2 = 0 or m12 = 0 (2.12e)
As will be discussed in Chapter III, a sinusoidal variation of displacements and forces is
assumed in the _1 direction. Therefore, these boundary conditions are ignored herein.
The boundary conditions for an edge _2 = constant are
i_U 1 = 0
or
fi12 = n12 - ENzzUl,2 + GNlz(u2,2
6u 2 = 0
or
fi22 = n22-___N22(u2,2 +_-ff)
6w = 0
+__GN12Ul, 2 - HN12u2,1 = 0
=0
(2.13a)
(2.13b)
21

or
R1] R2]
i_l = 0 or m12 = 0
6_2=0 or m22=0
=0
(2.13c)
(2.13d)
(2.13e)
where the terms with a caret (^) are effective force quantities per unit length at an edge
_2 = constant. The effective forces, fi12,fi22, and q2 are equal to forces in the original
(undeformed) _1-, _2-, and _3-directions along the longitudinal edges of the plate
(_2=constant). Introduction of these force quantities facilitates the derivation of the
stiffness matrix in Chapter III which relates the forces along the longitudinal edges of the
plate in the original coordinate directions to the corresponding displacements along those
edges.
The first three stability equations given in Eqs. (2.11a) through (2.11c) are now
written in a simplified form using the definitions of the effective forces per unit length
given in Eqs. (2.13a) through (2.13c)
nll,1 + fi12,2 +ql Nll Ul _ ;w
W,l-gR1 R1
-CN11(_ll + u1,11)+__GN12u2,11-HN12u1,12 =0
(2.14a)
+ fi22,2 + q2 N22 (n12,1R2 R2
w,2-_2) - N12 (wR 2 _ '1-_11 )
.N11u211+ON12 w1) )+Ul,ll -HN12 +u2,12 =0
(2.14b)
22

( u1,1) ( u2,1)ql,1 +q2,2 nll fi22 N11 W,ll - _N12 w,21 -R1 R2 R1 ) R2 )
+CNl1( 1)+Ul,1R1
GN12u2,1 _HN12Ul,2+ -0
R1 R1
(2.14c)
This form of these stability equations will be used herein. Note that Eq. (2.14b) contains
the perturbation variables n12 and q2. These variables are related to the effective forces,
fi12 and q2, through Eqs. (2.13a) and (2.13c).
2.5 Stability Equations Transformed to the Plate Reference Surface
The stability equations given in Eqs. (2.1 la) through (2.1 le) describe the response at
the centroidal surface of the plate. A superscript ° may be added to the displacement
quantities in these equations to indicate that they are centroidal quantities. These
equations are now written such that they describe the response at the reference surface of
the plate, which can be located a distance zc from the centroidal surface, Figure 22. To
write the stability equations at the reference surface, the following information is used:
o and o1) The relations of the displacements at the centroidal surface, u 1 u2, to the
displacements at the reference surface, u I and u 2 are:
O
u 1 = u 1 -Zc_ 1 (2.15a)
O
U2 = U2 - Zc_ 2 (2.15b)
2) o o and oThe relations of the moments at the centroidal surface, m 11 ' m 22 ' m 12' to
the displacements at the reference surface, mll, m22, and m12 are:
23

o (2.15c)roll =mll-zcnll
om22 = m22 - Zcn22 (2.15d)
om12 =ml2-zcnl2 (2.15e)
3) The following quantities do not vary with z:
Nll, N22, N12, n11, n22, n12, ql, q2, and w
4) The applied in-plane stresses, Nll , N=, and N12 act at the centroidal surface.
Substitution of Eqs. (2.15a) through (2.15e) into Eqs. (2.14a) through (2.14c) and Eqs.
(2.1 ld) and (2.1 le) yields the following equations
Ul --Zc@l-] - N12 (w+ ql Nil w, 1
nll,1 + fi12,2 R1 R1 R1 ] R1 _ ,2
+ Ul, 1 - Zcqbl + GN12[ u2 - Zcqb2 ],11,1
-__12[ul-Zc<],12=0
(2.16a)
+ fi22,2 + q2 N22 (w,2n12,1R2 R2
U 2 - Zc_) 2
R_ ) _ N_ (wR2 [ ,1
(u,- Zc<),,,+GN,,(w,, )_, R1 +[ ul -Zcq_l],ll
_I-IN 12 ( W'l )_,R2 +[u2-Zcq_2]12 =0
U 1 - Zc_) 1
(2.16b)
24

ul -_Z_c_l./ql,1 + q2,2 nll fi22 N11 w, 1
R1 R2 R1 ) ,1
u2 - Zcq_2 +__ +[ul_ Zcq_l] (2.16c)-_,_w,_ _7 ,, _, tU "
_N,_[u_-Zc<],,HN,_[u,-Zc<],___o+ +
R1 R1
mll,1 +ml2,2-Zc(nll,1 +n12,2)-ql--0 (2.16d)
m12,1 +m22,2-Zc(nl2,1 +n22,2)-q2 =0 (2.16e)
The natural boundary conditions are also rewritten after substitution of Eqs. (2.15a)
through (2.15e) into Eqs. (2.13a) through (2.13e). For an edge _2 = constant, the natural
boundary conditions become
(E w)12 = n 12 - __EN22[U1 - Zc* 1]2 + G N 12 u2 - Zc*2 ],2 + _2
(E---HN12 Ul -Zc*l],l + = 0
(2.17a)
n22 = n22 - FN22([u2 - Zc_)2],2 + + ---GN12[u1 - Zc*l ]2
-L_]12[ u2 - Zc*2 ],1 = 0
(2.17b)
2=q2Ni2(wiEuizc 11:I Eu2zc 21:+ 7,-7 )- _= w_+ _,7 .):o (2.17c)
m12 - Zcnl2 = 0 (2.17d)
25

m22- Zcn22= 0 (2.17e)
The last two stability equations, Eqs. (2.16d) and (2.16e), are now rewritten by
substitutingexpressionsfor the quantities(n 11,1+ n12,2) and (n 12,1+ n22,2)that can
be obtainedusing Eqs. (2.16a) and (2.16b), respectively,and the definitions for the
effective forcesper unit length, Eqs. (2.17a)through (2.17c). The definitions for the
effectiveforcesareneededsincethetermsn12andn22thatappearin thetwo abovearethe
perturbationvalues,not theeffective forces. Substitutionof theexpressionsfor thetwo
quantitiesaboveinto Eqs. (2.16d) and(2.16e),respectively,yields the final form of the
lasttwo stability equations
[ (u,_zc_,)mll,1 +m12,2-ql +zc ql Nil w, 1R1 R1 R1
N'_,(w,_u_-zc_)___N,(_,_+u,,,w-Zc_,),1
-EN_(u_-Zc,_t_ +C_N_(w'_R_ +[u_- Zc_,_],_
( w'2 2[u 1-zcq_l],12)] =0
(2.18a)
m12,1 + m22,2 - q2 + Zc u2 - Zcq_2.]q2 N22 w, 2R2 R2 R2 )
N12 (w,1 Ul -Zcq_ 1R2, _,i )-_BNll(Ua-Zc*2)ll
__Naa(W,_ ) (w,,_R 2 +[u2-Zcqb2],2 2 +GN12 +[Ul-Zcqbl],l 1- _R I
+i-zc_l_,aal-.NlalWl_,_2+_Eo2-Zc_2_,121]:o
(2.18b)
26

The stability equations in the form given in Eqs. (2.16a) through (2.16c) and Eqs. (2.18a)
and (2.18b) are those implemented into the VICONOPT code.
2.6 Constitutive Relations
The present analysis allows for generally laminated composite materials. The
geometry of a general, curved laminate is given in Figure 2.3. As shown in the figure,
the number of layers in the laminate is n1, and the width of the laminate is b. The radius
of curvature of the _2-axis, R 2 is shown in the figure as well.. The radius of curvature of
the _l-axis, R1 is not shown; however, its direction may be inferred from that of R2. The
lamina coordinate system is the (_v, _2,, _3) system and the laminate coordinate system is
the (_, _2, _3) system. The lamina coordinate system is aligned with the principal
material direction of the lamina, and the laminate coordinate system is aligned with the
principal geometric directions of the laminate. The coordinate system for the kth lamina
is oriented at an angle 0 k with respect to the laminate coordinate system. The stress-strain
relations in the lamina coordinate system for a lamina of orthotropic material in a state of
plane stress are
t 11tr 1101t 11]°22 °o2 0 221:12' Q66 12
(2.19)
where the [Q] matrix is referred to as the reduced stiffness matrix for the lamina and is
defined in [45] in terms of the elastic engineering constants of the lamina. These
relations may be written in the laminate coordinate system by use of transformation
matrices as defined in [45]. The transformed relations are
27

t+11ti+11012 161i11to===IQ_,=_==_=6i_==1:12 [q16 Q26 Q66 [Y12
(2.20)
where the [Q] matrix is the reduced transformed stiffness matrix for the lamina. Both of
Eqs. (2.19) and (2.20) may be thought of as stress-strain relations for the kth lamina in a
multi-layer laminate. Therefore, Eq. (2.20) may be written as
{O'}k = [Q]k {e}k (2.21)
The constitutive relations for a thin, elastic laminated composite shell may now be
defined as
-N11
N22
N12
Mll
M22
M12
All A12 A16
A12 A22 A26
A16 A26 A66
Bll B12 B16
B12 B22 B26
B16 B26 B66
Bll B12 B16
B12 B22 B26
B16 B26 B66
Dll D12 D16
D12 D22 D26
D16 D26 D66
Ell
E 22
Y12
1(11
1( 22
1(12
(2.22)
where the resultant forces and moments acting
respectively, are defined as
tN11t Zk +11tN22 = _ Zkfll°22 d_3N12 k=l - ["g12
on the laminate, {N} and {M},
(2.23)
[_"I z_[°"lM22 = _ ZkfllO22_ _3 d_3M12 k=l - ['g12 |
(2.24)
28

wheren_is the total numberof layersin the laminate. The extensional,coupling, and
bendingstiffnessmatrices,A, B, andD, respectively,aredefinedas
(A, B, D)= ni Zk 3 ) d_3 (2.25)k=l Zk_ 1
The analysis in VICONOPT allows for laminates with fully populated A, B, and D
matrices.
The constitutive relations for transverse shear used in VICONOPT are those
presented by Cohen in [44]. The constitutive relations for transverse shear are written in
inverted form as
{ 13}:rkllk12]fql}23 [k12 k22 q2(2.26)
where [k] is a symmetric 2-by-2 transverse shear compliance matrix whose terms are
defined in [44]. The terms of the [k] matrix were derived for general, anisotropic, multi-
layered composite shells and they are a generalization of results for a shell with a
homogeneous wall for which the transverse shear correction factor for the shear stiffness
is 5/6. The procedure used in [44] for obtaining the terms of the [k] matrix follows.
Statically correct expressions of in-plane stresses and transverse-shear stresses were
derived in terms of the transverse-shear stress resultants and arbitrary constants that were
interpreted by Cohen as redundant "forces". The expressions for in-plane stresses were
obtained using the constitutive relations given in Eq. (2.22) and linear distribution of in-
plane strains through the wall thickness. The expressions of transverse-shear stresses
were obtained by integrating in the _3-direction the three-dimensional equilibrium
equations. The transverse-shear stress resultants were then used to derive an expression
of the volumetric density of the transverse-shear strain energy. A statically correct
29

expressionof theareadensityof the transverse-shearstrainenergywasthenobtainedby
integratingin the_3-directionthis volumetric density. Thetransverse-shearconstitutive
relationsgivenin Eq. (2.26)werethenderivedby applyingCastigliano'stheoremof least
work [46] by minimizing the areadensity of the transverse-shearstrain energywith
respectto theredundantforcesmentionedpreviously.
30

CHAPTER III
IMPLEMENTATION INTO VICONOPT
In this chapter, the implementation of the present theory into the VICONOPT code is
described. Additional simplifications made to the theory are described first. A
discussion of the use of the transverse-shear strain, _'13, as a fundamental displacement
variable in the problem to maintain continuity of rotations at plate junctions is then
presented. The derivation of an expression for the curved-plate stiffness matrix is
described. The terms of matrices that are needed to calculate this stiffness matrix were
obtained using MATHEMATICA [40], and they are presented in Appendix A. The terms
for both CPT and SDPT are presented, and the terms that result from the inclusion of
direct in-plane transverse and in-plane shear loads in the in-plane stability equations are
specified. As stated previously, the implementation of the curved-plate theory into
VICONOPT follows very closely the method presented in Reference [2]. Therefore, the
following discussion is necessarily similar to that presented in that reference.
3.1 Simplifications to the Theory
Before proceeding with the derivation of the curved-plate stiffness matrix, a
discussion of several simplifications to be implemented is presented. First, the theory
implemented into the VICONOPT code considers structures that are prismatic in the
longitudinal direction. Therefore, for the curved plates being considered in the present
report, the radius of curvature in the longitudinal direction, R1, is infinite; and any terms
1involving the quantity -- are zero. Although these terms are set equal to zero for the
R1
calculation of the terms of the stiffness matrix, they are retained for completeness in the
31

theorypresentedin this chapter. Another simplification to the theory involves limiting
the capability to locate the referencesurfacea distancezcfrom the centroidal surface.
This capability hasonly beenimplementedfor thecasewheretheeffectsof N= andN12
loadsin the in-planestability equationsareneglected.Theexpressionsfor the stiffness
termsthat resultwhenN= andN12areincludedin the in-planestability equationsand zc
is non-zero are prohibitively long. Therefore, in the derivation to follow, only the
following two casesarepresented:
1) N= and N12are included in the in-plane stability equationsand z_is zero (i.e.,
referencesurfaceis coincidentwith thecentroidalsurface);and,
2) N= andN12areneglectedin the in-planestability equationsand z_is non-zero(i.e.,
referencesurfacemaybetranslatedfrom thecentroidalsurface).
3.2 Continuity of Rotations at a Plate Junction
One important issue to be addressed in the analysis of plate assemblies is the
continuity of rotations at a plate junction. The original VIPASA code is based upon CPT,
and the theory only treats four degrees of freedom (DOF) at a longitudinal plate edge.
These DOF are the three displacement quantities, u1, u2, and w, and a rotation about the
_1 -axis, _)2. Maintaining continuity of these DOF at a typical plate junction is very
straightforward. However, when SDPT is considered, there are five DOF at a
longitudinal plate edge. These DOF are the four from CPT as well as an additional
rotation, _)1, that results from the inclusion of transverse-shear deformation. Another
problem that must be addressed is that when two plates are joined together such that one
is rotated at an arbitrary angle, 0, to the other, rotations about the normals to the
centroidal surfaces of the two plates must be included to satisfy continuity of rotations.
This rotation, %, is not accounted for in the present plate theory. The procedure used in
32

VICONOPT to maintain continuity of rotations follows that used by Cohen in [47]. This
procedure introduces the shear strain, _'13,as a fundamental displacement variable instead
of the rotation, '1. The justification for using this approach is described subsequently.
The displacements and rotations at a typical plate junction are shown in Figure 3.1.
The two plates, numbered 1 and 2, are shown viewed along the 1-axis, and it is obvious
that the u 1 displacements are easily matched regardless of the orientation of plate 2. The
displacements and rotations for which continuity must be maintained are u2, w, '1, and %.
Upon inspection of Figure 3. l(a), the following expressions for coplanar plates (0 = 0)
may be written as
u 1 = u_ (3.1a)
w 1 = w 2 (3.1b)
,1 n =,2 (3.1d)
where the superscripts 1 and 2 refer to the plate numbers. Similarly, upon inspection of
Figure 3. l(b), the following expressions for 0 = +90 ° may be written as
u 1 = w 2 (3.2a)
w 1 _u 2= 2 (3.2b)
,11 = _,2 (3.2c)
,1 n =,2 (3.2d)
33

Finally, uponinspectionof Figure 3.1(c),the following expressionsfor arbitrary0 may
bewrittenas
u1 = u2 cosO+ w2sinO (3.3a)
w1 = w2cosO- u2sinO (3.3b)
911=92 cosO- _2 sinO (3.3c)
91n = 9 2 cos0 + 9 2 sin0 (3.3d)
The rotation about the normal of a line element originally directed along the _l-axis is
shown in [48] to be
0u 29n - (3.4)
Using this definition, Eqs. (3.3c) and (3.3d) are written as
29] = 9 2 COS{)- U2,1 sinO (3.5a)
1 2 + 912 sinU2,1 = U2,1 COS6 19 (3.5b)
Using Eqs. (3.3a) and (3.3b) and the definition for _t13, Eq. (2.2d), the previous two
equations may be written as
7 113 = cosO 7 213 (3.6a)
0 = -sinO 7 213 (3.6b)
34
The results shown in Eqs. (3.6a) and (3.6b) indicate that for plates that are not
coplanar (i.e., one plate oriented at an arbitrary angle, 0, to the other), the shear strain, 713,
must be set equal to zero for each plate to maintain continuity of rotations. Therefore, if
713 is made a fundamental displacement quantity instead of _h, the shear strain can be set
equal to zero by simply striking out the appropriate rows and columns in the overall
stiffness matrix. Performing this operation reduces the stiffness matrix to the same size
as that for CPT. The VICONOPT code utilizes this procedure for plates that are not
coplanar. For plates that are coplanar, i.e., 0 = 0, the shear strain in plate 1 is equal to
that in plate 2. The VICONOPT code handles this situation by creating a substructure
using the two plates with all DOF present and eliminating the extra DOF before assembly
into the final stiffness matrix.
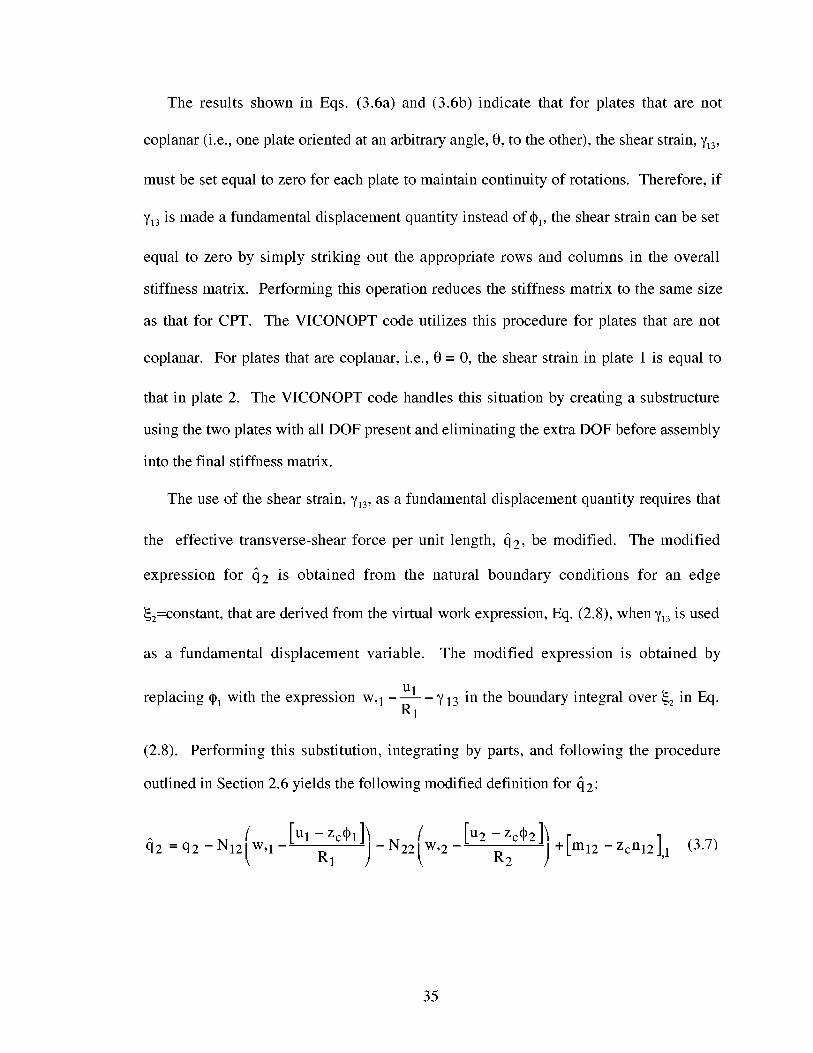
The use of the shear strain, 713, as a fundamental displacement quantity requires that
the effective transverse-shear force per unit length, q2, be modified. The modified
expression for q2 is obtained from the natural boundary conditions for an edge
_2=constant, that are derived from the virtual work expression, Eq. (2.8), when 713 is used
as a fundamental displacement variable.
replacing _)1 with the expression w, 1 ----Ul
R1
The modified expression is obtained by
_' 13 in the boundary integral over _2 in Eq.
(2.8). Performing this substitution, integrating by parts, and following the procedure
outlined in Section 2.6 yields the following modified definition for q2:
{q2 =q2-N12_w,1 [Ul -Zc_l])p'l )- N22( w'2
[u2- Zc,2]))R2
+[ m12 -Zcnl2],l (3.7)
35
Thedefinition for q2 given in Eq. (3.7) replaces that given in Eq. (2.17c). Note that the
term m12,1 which appears in the Kirchhoff shear term of CPT is also present for the case
of SDPT when _'13,is used as a fundamental displacement quantity.
3.3 Derivation of the Curved-Plate Stiffness Matrix
Throughout this section, reference is made to force quantities. Although these
quantities are forces and moments per unit length, they are designated forces herein for
convenience. The first step in implementing the present theory into VICONOPT is to
derive a stiffness matrix that relates the force quantities along the two longitudinal edges,
b_- to the displacements along those edges. The desired force and displacement_2 =+2'
quantities are in the direction of the original (undeformed) coordinates. The
displacement variables are
i u 1
U2
d= w
,2
i _'13
(3.8)
where the shear strain, _'_3, has been introduced as a fundamental displacement quantity
instead of the rotation, %. The force variables that correspond to the displacement
variables given in Eq. (3.8) are
"i ill2^
n22^
q2
m22
i m12
(3.9)
36

Note that theeffective forcesat theboundaries,definedby Eqs.(2.17a)and(2.17b)and
Eq. (3.7),arebeingusedastheforcequantitiessince,asdiscussedin ChapterII, theyare
equalto theforcesin thedirectionof theoriginal (undeformed)coordinates.
Theproblemmaynow be reducedto ordinarydifferential equationsin y by assuming
that the responseof the plate in the longitudinal _l-direction varies sinusoidally.
Therefore,if thedisplacementsandforcesin theplatearenow consideredto befunctions
of _2,thevariablesof Eqs.(3.8)and(3.9)maybewrittenas
where
i = _1 )z(_ 2 ) (3.10)Z(_I,_ 2 )= exp )v
and )v is the half-wavelength of the response in the _l-direction. Since a sinusoidal
variation in the _l-direction is assumed, the vector z will involve the amplitudes of the
displacement and force quantities. The imaginary number, i, has been used in Eqs. (3.8)
and (3.9) to account for the spatial phase shift that occurs between the perturbation forces
and displacements which occur at the edges of the plates during buckling for orthotropic
plates without shear loading and to result in real plate stiffnesses when using the
exponential expression of Eq. (3.10).
The next step in the derivation is to express all unknowns in terms of z. A partially
inverted form of the constitutive relations, Eq. (2.22), is used to express the required
quantities as functions of the fundamental variables in d and f or terms that may be
derived from the fundamental variables. The partially inverted constitutive relations are
37

nll] [ hll h12 h13 h14 h15 h16 t;ll
t;22 ] ] -h12 h22 h23 h24 h25 h26 n22
_12 _ = /-hl3 h2____3 h3____3 h3___44 h3___55h3____66nl_____2
mll / / h14 -h24 -h34 h44 h45 h46 ' Kll
22| l-his h2s h35 -h45 h55 h56 m22
_:12 J I-hi6 h26 h36 -h46 h56 h66 m12
_'21
(3.11)
where the linear portion of _11 from Eq. (2.2a) is used
W
t;ll =Ul, 1 +--R1
The variables _ql and 91 were defined in Section 2.2 of Chapter II. The constants h_j in
the first portion of Eq. (3.11) are calculated from the A, B, and D matrices defined in Eq.
(2.25). The constants h77, h78, and h88 are shear stiffness terms and are calculated using
the theory presented in [44].
Another requirement of the present derivation is to express the relationship between
q2 and q2 without any _2-derivatives. This expression is
{\ [Ul- Zc_)l])R1 + N22(q)2- h7871)+[m12- Zcnl2],lq2 + N12 [w,1
(3.12)q2 = 1- N22h88
As with the stability equations, only the linear portion of the strain-displacement
relations are considered in the present derivation
38

Y12 = Ul,2 + U2,1 (3.13a)
w1322 = u2, 2 +-- (3.13b)
R2
u223 = w,2 --- - 92 (3.13c)
R2
1_22 = -92,2
= +%1)
(3.13d)
(3.13e)
The expression for r_12can be re-written after substituting expressions obtained for 91 and
92 from Eqs. (2.5a) and (2.5b) and using the linear portion of 1312
R2 U2+292 ] +131----2-2+Y1,2,1 R1
(3.13f)
Using Eqs. (3.11) and (3.12), the strain displacement equations, Eqs. (3.13a) through
(3.13d) and (3.13f) and the equations, Eqs. (2.16a) through (2.16c) and (2.18a) and
(2.18b) are written in terms of the elements of z as
T z'=Pz or z'=T _ Pz (3.14)
where a prime denotes differentiation with respect to _2. The square matrix T appears in
the present study as a result of the inclusion of the effects of N= and N12 in the in-plane
equilibrium equations. This matrix was shown to be the identity matrix when these terms
were neglected in [2]. The presence of off-diagonal terms in this matrix is a fundamental
difference between the present theory and that presented in [2].
The elements of z are now assumed to be given by
39

i [5 _2) (3.15)zj = cj exp b
where [5 is a characteristic root of the differential equation. The number of values of [5 is
equal to the order of the differential equation system. Substitution of Eq. (3.15) into Eq.
(3.14) results in the following equation
where
(R - [51) c = 0 (3.16a)
R = bT-1p (3.16b)
and I is the identity matrix. The vector c consists of the cj of Eq. (3.15). The matrix R is
obtained by premultiplying P by T 1. The eigenvalues of the matrix R are the
characteristic roots of the differential equation. This matrix is not symmetric; however, it
can be made real by multiplication or division of appropriate rows and columns by the
imaginary number, i. The elements of the matrices T and P are given in Appendix A for
both SDPT and CPT.
For each eigenvalue of R, there exists an eigenvector, e. A matrix C may be defined
with columns as the eigenvectors, e, the upper half of each column, denoted a, will be
associated with displacements, and the lower half, denoted b, will be associated with
forces. The form of C is therefore
a a 2 . . . ajC= bl b 2 . . . bj(3.17)
The next step in the derivation is to write the amplitudes of the displacements and forces
at the two edges of the plate. Quantities evaluated at _2 =--- are identified with a
40

bsuperscript1 andquantitiesevaluatedat _2 -- +- are identified with a superscript 2 as
2
follows:
d! = N (-i 13kJ _ ajkr k exp
k=l _ 2(3.18a)
J = _ ajkr k exp (3.18b)k=l
N (-i 13kf = _ bjkr kexpk=l 2
(3.18c)
f2 = E bjkrkexp (3.18d)k=l
where the rk are constants determined from the edge values and N is the order of the
differential equation. Equations (3.18a)-(3.18d) may be written in matrix form as
{"'}d2 =Er
{f'}f2 =Fr
(3.19)
(3.20)
Eliminating r from Eqs. (3.19) and (3.20) yields
(3.21)
where K is the stiffness matrix given by
K = F E "1 (3.22)
As for the case of CPT, K is real and symmetric for orthotropic plates without in-
plane shear loading, and it is Hermitian otherwise. Reference [2] presents a discussion of
41

techniquesusedto ensurethat accuratenumericalresultsfor K are obtainedfrom Eq.
(3.22).
3.4 The Wittrick-Williams Eigenvalue Algorithm
A brief discussion of the analysis procedure used in VICONOPT is in order. As
previously mentioned, VICONOPT uses a specialized algorithm for determining any
natural frequency or buckling load for any given wavelength [29]. The development of
this algorithm was necessary because the complex stiffnesses defined in the previous
section are transcendental functions of the load factor and half wavelength of the
buckling modes of the structure. The eigenvalue problem for determining natural
frequencies and buckling load factors is therefore transcendental.
The iterative analysis procedure used in VICONOPT is described in [36]. For this
procedure, the plate stiffnesses for a given wavelength are evaluated at a series of trial
values of the eigenvalue being determined until convergence is attained. This eigenvalue
is either the load factor for buckling or the natural frequency for vibration, and it is
different than the eigenvalues of the R matrix of Eq. (3.16b). Unless otherwise specified
by the user, the default initial trial value used in the VICONOPT code is one. For each
trial value of the eigenvalue considered, the analysis requires the plate stiffnesses as well
as the number of eigenvalues that lie below the trial value for the entire plate assembly
assuming the longitudinal edges of each individual to be clamped. A complete
description of the eigenvalue algorithm is given in [28]. Determining the number of
eigenvalues exceeded by a plate with clamped edges is very difficult except for very
specialized cases. Therefore, the procedure developed in [28] is used. This procedure
subdivides each plate into sub-elements with a small enough width such that none of the
eigenvalues of the sub-elements with clamped edges lie below the trial value. A sub-
elements is then used as a substructure and is repeatedly doubled until the original plate
element is obtained. Using a simple procedure at each doubling step [29], the number of
42

eigenvalues that lie below the trial value for the complete plate is returned. This
procedure is repeated for each plate in the assembly. Using this information and other
information obtained from the stiffness matrix of the entire assembly, the total number of
eigenvalues for the entire plate assembly that lie below the trial value is obtained. An
iterative procedure is then used to refine the trial value until the desired eigenvalue is
calculated to within the accuracy required.
One important piece of information required for the analysis procedure described
herein is the number of subdivisions required for each plate. As seen in Appendix A, all
of the terms of the R matrix are proportional to the plate width, b. Therefore, all of the
eigenvalues of R are proportional to b. Furthermore, it is important to note that an
eigenvalue equal to _ corresponds to buckling or vibration with simply supported
longitudinal edges. By successively halving the value for b until all the real eigenvalues
of R are less than _, a value for the width of the sub-elements for which no eigenvalues
lie below the eigenvalue for simply supported edges is determined. This width also
guarantees that no eigenvalues for the sub-elements lie below the eigenvalue for clamped
edges. This width is that used in the iterative analysis procedure described previously.
43

CHAPTER IV
NUMERICAL RESULTS
In this chapter, numerical results are presented using the newly implemented curved-
plate analysis capability in VICONOPT. Results from several example problems are
presented to verify the results obtained with this new capability. A convergence study
using the segmented-plate approach in VICONOPT is performed for an isotropic
cylindrical shell subjected to uniaxial compression to identify a suitable number of
segments to be used when comparing results. Results comparing the computational effort
required by the new analysis to that of the analysis currently in the VICONOPT program
are also presented for this example. Comparisons of results for several curved plates
analyzed in Ref. [32] are then made. The effects of including terms related to in-plane
transverse loads in the in-plane stability equations are examined using a long cylindrical
tube subjected to in-plane transverse loading. Finally, the curved-plate analysis is used to
conduct a design-optimization study of a honeycomb-sandwich cylindrical shell
subjected to uniaxial compression. Comparisons of analyses using both physical and
tensorial strain measures are made for selected examples, and, where appropriate, results
using CPT and SDPT are compared.
4.1 Convergence of the Segmented-Plate Approach
The convergence of results using the segmented-plate approach in VICONOPT is
examined for the case of an aluminum cylindrical shell subjected to uniaxial
compression, see Figure 4.1. The values of the material properties used for this example
are E = 10.0 x 106 psi and v12 = 0.33. The wall thickness, t, is 0.1 in., and the radius, R2 is
60 in. As shown in Reference [49], the critical value for the stress resultant, Nllcr, for
the axisymmetric buckling of a long isotropic cylindrical shell is
44

Et 2
Nllcr = R2_/3(1 v22)-1019.354lb/in._ (4.1)
For v12 = 0.33, the critical half wavelength, )_cr, for axisymmetric buckling is shown in
[49] to be
f R2t 2)_cr _ /= in. 4.2,
Results illustrating the convergence of the VICONOPT segmented-plate results for
Nllcr as a function of the number of segments used to approximate the cylinder are
shown in Figure 4.2. In this figure, the results of the segmented-plate analysis are shown
as the solid curve. The theoretical value obtained from Reference [49] is shown as the
dashed horizontal line. The value obtained using the present curved-plate analysis with
two curved-plate elements is shown as the open symbol. All results in this figure are
calculated for the value of )_cr given in Eq. (4.2). The VICONOPT results presented in
this figure are obtained using CPT with tensorial strain measures. As shown in Figure
4.2, the segmented-plate results converge to the theoretical value when 120 segments are
used. Therefore, to ensure that converged results are obtained when the segmented-plate
approach is used to analyze the remaining example problems, sixty segments will be used
when analyzing curved plates with an included angle of 180 degrees or less, and 120
segments will be used when analyzing full cylinders.
This example problem is also used to study the computational requirements of the
new curved-plate analysis in relation to the segmented-plate approach. A plot of
normalized CPU time as a function of the number of plate segments used in the
approximation is shown in Figure 4.3 for the segmented-plate analysis using either CPT
or SDPT. The normalized CPU time shown in this figure is the CPU time required for
45

the segmented-plateanalysesnormalizedwith respectto the CPUtime requiredfor the
curved-plateanalysisusingtwo curved-plateelements.The horizontaldashedline is at a
normalizedCPU time of 1.0, and it representsthe curved-plateanalysis results. As
shown in the figure, to achieve convergencewith 120 flat-plate segmentsrequires
approximately3.5 timesand 16.7timesasmuchCPUtime asthecurved-plateanalysis
for CPTand SDPT,respectively. (For theanalysisusingSDPT,G12= G13= G23).One
considerationto noteat this time is that the segmented-plateanalysisin VICONOPT is
implementedto handlethegeneralcaseof variablegeometry,stiffnessandloadingin the
_2-direction.This approachis thereforenot ascomputationallyefficient asit couldbefor
thecaseof constantcurvature,stiffness,and loadingin that direction (as is the casefor
the curved-plateanalysis). Oneapproachto determiningthe additional computational
efficiency that may be obtainedwith the segmented-plateanalysisinvolves defining a
single,small flat plate that is repeatedlydoubledusingthe substructuringcapability in
VICONOPT until the curved-platesegmentis obtained. This techniqueis referredto
hereinas 'doubling'. Resultsrelating the computationaleffort of this approachto the
curved-plateanalysisindicate thatfurther reductionin thecomputationaleffort required
for the segmented-plateanalysiscanbeobtainedusingthis technique.This result occurs
becausethe in-plane and out-plane equationsare uncoupled in the segmented-plate
analysis,andanalyticalexpressionsfor the platestiffnessescanbeused. However,this
approachis currently not automatedin the VICONOPT code,anda separate'doubling'
effort would have to be madefor every curved-platesegmentin any given analytical
model.
4.2 Buckling of Curved Plates With Widely Varying Curvatures
The example problems presented in the next two sections are taken from Ref. [32],
and they are used to verify the results obtained using the new curved-plate analysis in
VICONOPT. The positive sense of the applied in-plane loadings to be considered in all
46

of the following examplesis givenin Figure4.4. Thefirst exampleproblemconsidered
studiesthebuckling of a symmetricallylaminatedcurvedplatewith clampedlongitudinal
edgesasa function of thecurvatureof theplate. The geometryof the plateis shownin
Figure 4.5. As shown in the figure, the plate is constructedfrom symmetrically
laminatedboron/epoxyplieswith a [0/90/+45]slayup. To allow for direct comparisonof
resultswith thosepresentedin [32], the SI units are usedfor this exampleand the
examplein the following section. The material propertiesfor a boron/epoxyply are
givenin Table1.
Thefollowing loadingsareconsideredfor this exampleproblem:Nil only, N= only,
N12only, andcombinedNil = N= = N12.The buckling of this plate subjectto thesefour
different loadingswas investigatedwhile varying the valueof the curvatureparameter,
b2--, from 1to 1000. Thevaluesof b, R2,and[_usedfor theseanalysesaresummarizedR2t
in Table 2. Both physical and tensorial strainsare used with the new curved-plate
analysis,while physical strainsonly are usedfor the segmented-plateanalysis. The
analysisof [32] usesphysicalstrains.All analysisresultspresentedin this sectionarefor
CPT. Thetermsinvolving N= andN12areincludedin the in-planestability equationsfor
all analyses.Theresultsof this studyarepresentedin Table3 for Nil loading,in Table4
for N= loading, in Table 5 for N12loading,andin Table6 for combinedNil = Nz2= N12
loading. The critical values of the stressresultantspresentedin these tables were
calculatedusing for the values of -- given in the tables. Thesevalues of -- wereb b
presentedin Reference[32]. The critical valuesof thesestressresultantsarealsoplotted
asa function of the curvatureparameterin Figure 4.6 throughFigure 4.9,respectively.
As shownin thesetables,the presentanalysiscomparesvery well with that presentedin
[32] and with the segmented-plateanalysisfor widely varying valuesof the curvature
47

parameter. As shownin Tables3 - 6, thereis no appreciabledifferencein the results
obtainedusingphysicalandtensorialstrains.
4.3 Buckling of an Unsymmetrically Laminated Curved Plate
This example problem includes the effect of bending-stretching coupling and shear-
extension coupling on the buckling of an unsymmetrically laminated curved plate with
simply supported longitudinal edges. The geometry of the curved plate is shown in
Figure 4.10. As shown in the figure, the laminate being studied consists of a 0.0508-cm.-
thick layer of 2024 aluminum that is reinforced on the inner surface with pairs of -+45_
boron/epoxy plies. The material properties for 2024 aluminum are given in Table 1. For
this example, the number of pairs of _+45° boron/epoxy plies is increased from one to
seven. The analyses used for this example are identical to those used for the previous
example. The critical values for buckling of the stress resultants Nil and N12 are
presented in Tables 7 and 8, respectively. These values are also plotted as a function of
the number of boron/epoxy plies used in the laminate in Figure 4.11 and Figure 4.12,
respectively. The agreement between all the analyses is very good. As with the previous
example, there is no appreciable difference in the results obtained using physical and
tensorial strains. Results were also computed using SDPT. However, for the case of
seven pairs of pairs of _+45° boron/epoxy plies, the R/t ratio is still approximately 300,
and the effects of transverse-shear deformation are minimal. Therefore, as expected, the
critical values for buckling of the stress resultants Nil and N12 were slightly less than
those for CPT, but the differences were less than 0.2 percent. With regards to the CPU
time requirements for this example, the segmented-plate analysis using SDPT required
approximately 35 times as much CPU time as the curved-plate analysis for the case of 14
boron/epoxy plies. Furthermore, the results obtained using the 'doubling' approach
described in Section 4.1 indicate that the computational efficiencies offered by that
approach were not realized for this example problem. This result occurs because the
48

coupling that occurs due to the unsymmetric laminate prevents the in-plane and out-of-
plane equations from being uncoupled, and the same numerical approach for calculating
the plate stiffnesses as that used for the curved-plate analysis must be used.
4.4 Effect of N= Terms in the In-Plane Stability Equations
As stated previously, the original segmented-plate analysis in the VICONOPT code
neglects the effects of the terms involving N= and N12 in the in-plane stability equations.
This example problem illustrates the effect these terms may have on the buckling of an
isotropic (aluminum) long cylindrical tube subjected to uniform external pressure. The
material properties in English units for aluminum are given in Table 9. The geometry of
this example problem is shown in Figure 4.13. As shown in the figure, only half of the
tube is modeled since the buckling mode being studied is symmetric (i.e., two full waves
in the circumferential direction). The pressure load is modeled as an applied N22 hoop
loading. The value of the external pressure that would generate this hoop load is obtained
from the following expression [49]
N22p - (4.3)
R2
Simitses [50] presents a detailed discussion of the buckling of a thin circular ring
uniformly compressed by external pressure. When considering the behavior of the
pressure load as the ring buckles, Simitses describes three possible cases. In Case 1, the
pressure load is assumed to remain normal to the deflected surface. This loading is
referred to as a live pressure load. In Case 2, the pressure load is assumed to remain
parallel to its original direction. This loading is referred to as a dead pressure load. In
Case 3, the pressure load is assumed to always be directed toward the center of curvature
of the ring. This loading is referred to as a centrally directed pressure load. Only Cases 1
and 2 will be discussed in the present report.
49

In Reference [50], Simitses presents in-plane and out-of-plane stability equations for
the thin circular ring which may be rewritten in the notation used in the present report as
n22,2 R2 -Pcr w,2- -P2 =0(4.4)
n22 (R2w,22 -u2,2) P3 0 (4.5)q2,2 R2 Pcr - =
where P2 and P3 are the perturbation values of the applied pressure load in the buckled
state in the _2- and _3-directions, respectively. For the case of a live pressure load in
which the applied pressure is assumed to remain normal to the deflected surface, Pz and
P3 are (for small deformations)
(P2 =-Pcr w,2- and P3 = 0 (4.6)
For the case of a dead pressure load in which the applied pressure is assumed to remain
parallel to its original direction, P2 and P3 are
P2 = 0 and P3 = 0 (4.7)
Substituting Eqs. (4.3) and (4.6) into Eqs. (4.4) and (4.5), yields the following stability
equations for the case of live pressure loading:
+ q___m2= 0 (4.8)n22,2 R2
u2,2 ]n22 NZZcr w,22 - = 0 (4.9)q2,2 R2 R2 ]
50

SubstitutingEqs. (4.3) and (4.7) into Eqs. (4.4) and(4.5), yields the following stability
equationsfor thecaseof deadpressureloading:
n22,2-t q2 N22cr w,2- = 0R2 R2
(4.10)
u2,2]n22 N22cr w,22- = 0q2,2 R2 R2 )
(4.11)
For live pressure, the critical value of pressure is shown in [50] to be
Therefore,
3EI
Pcr - R_,2 (4.12)
3EI
NZZcr - R92 (4.13)
For dead pressure, the critical value of pressure is shown in [50] to be
4EI
Pcr R3(4.14)
Therefore,
4EI
N22cr- R2 (4.15)
51

As discussedin Reference[49], resultsfor the caseof a long cylindrical tubeuniformly
compressedby externalpressure,may beobtainedby consideringan elementalring of
unit width and using Eqs. (4.12) through (4.15) with E replaced by E/(1-v2) and I
replacedby t3/12.
External pressureloads are not included in the present analysis. However, an
equivalentN22loadingmay becalculatedusingEq. (4.3). Thepresentanalysistreatsthe
applied loadsasdeadloadssinceno effort is madeto modify the applied loadsas the
plate deforms. The stability equationsin the _2and _3directions, Eqs. (2.11b) and
(2.1lc) for thepresentanalysisarewritten for a thincircular ring subjectedto N22loading
by ignoring any terms that involve N12,_1, or derivativeswith respectto _. These
equationsare
- - + u2,22 = 0n22,2-t Rzq2 NZZR2w,2 _FN22_R2 (4.16)
u2,2.]+ -FN22n22 N22 w,22q2,2 R2 R2 ] R2 w )-- + U2, 2 = 0 (4.17)
R2
Comparing Eqs. (4.9), (4.11), and (4.17), reveals that if physical strains are used in the
present analysis (i.e., F = 0), the out-of-plane stability equation is identical to that given
by Simitses for both live and dead pressure loads. Furthermore, the in-plane stability
equation for the live pressure load case is recovered by the present analysis if the N22
term is neglected in Eq. (4.16). The dead pressure load case is seen to be recovered when
the N22 term is included in Eq. (4.16). Comparing Eqs. (4.6), (4.7), and (4.16), shows that
52

for the case of physical strains, the remaining term involving N= is actually equivalent to
the component of a live pressure load in the _2 direction (see Eq. (4.6)).
Buckling results for this example are presented in Table 10. The VICONOPT results
presented in this table are for physical strains. As previously discussed, the VICONOPT
result when the N= term is neglected in the in-plane stability equation corresponds to the
case of live pressure load, and the VICONOPT result when the N= term is included in the
in-plane stability equation corresponds to the case of dead pressure load. The results for
physical strains for the segmented-plate analysis always equal those for the case of dead
pressure load since the N= term in the in-plane stability equation also involves 1/R 2 and it
therefore drops out of that equation altogether. These results illustrate the dramatic effect
that the N= and N12 terms in the in-plane stability equations can have on the buckling
results for curved plates.
4.5 Design Optimization of a Cylindrical Shell Subject to Uniaxial
Compression
The final example utilizes the new curved-plate analysis with the design optimization
capability of VICONOPT to perform a structural optimization of two different cylindrical
shell concepts subject to uniform axial compression (Nil loading). The two concepts are
solid-wall construction and honeycomb-sandwich construction. The geometry of this
example problem is shown in Figure 4.14. As shown in the figure, the facesheets of the
honeycomb-sandwich concept are aluminum, and the core is Korex TM aramid paper
honeycomb core [51]. The solid-wall concept is aluminum. The material properties used
for the facesheets and core are presented in Table 9.
Before results for this example are presented, a discussion of the modeling technique
used to model this cylinder is presented. An analysis of a complete cylinder was
performed using only one plate element with the new curved-plate analysis capability in
53

VICONOPT. The cylinder is modeledby defining a repetitive cross-sectionin which
there is only one nodethat is connectedto itself. However,numerical problemswere
encounteredwhen analyzing closed cylinders with very small wavelengths. The
following procedurewasusedto avoid this problem. First, a45° arcsegmentis defined.
Second,a90° arcsegmentis definedasa substructureby connectingthe original45° arc
segmentto itself. Similarly, a 180° arc segmentis constructedfrom two 90° arcs.
Finally, a 360° arc is constructedfrom two 180° arcs. This substructureis thenusedto
definetherepetitivecross-sectionof thecylinderaspreviouslydiscussed.This modeling
techniqueis usedfor all closedcylindersanalyzedin thepresentreport,andnonumerical
problemswereencounteredwhenusingthis technique.
The design variables for the structural optimization are the thicknessesof the
facesheetsandthecorefor thesandwichconceptandthewall thicknessfor the solid-wall
construction. There is no minimum-gage restriction for any designvariables. The
nominal valuesfor thesevariablesare0.1 in., 0.5 in., and 0.1 in., respectively. The
designconstraintsare that the strain in the facesheetsor the solid wall cannotexceed
0.005in/in andthatthestressin thecorecannotexceed115psi in the_l-directionand55
psi in the _2-direction. The resultsof this study,including the massof the optimized
cylinder and the final values of the design variables are given in Table 11 for the
honeycomb-sandwichconceptand in Table 12for the solid-wall concept. Resultsfrom
both CPT and SDPT are given in thesetables. The optimized massvaluesare also
plottedasa function of theappliedloadingin Figure4.15. As seenin thetablesandthe
figure, the valuesfor optimizedmassobtainedusingCPTareslightly lessthan thosefor
SDPT for the honeycomb-sandwichcylinder as the applied loading is increased.
However, the valuesfor core thicknessobtainedusing CPT aresignificantly less than
thosefor SDPTfor thehoneycomb-sandwichcylinderastheappliedloadingis increased.
TheseresultsareexpectedbecauseCPTresultsin anoverly stiff approximationsincethe
54

effectsof transverse-sheardeformationareneglected. This overly stiff approximation
resultsin higherbuckling loadsfor a givencore thickness.Therefore,thecorethickness
andthe optimum massobtainedis lessthan that obtainedusing SDPT. The optimized
mass values for the solid-wall construction are much greater than those for the
honeycomb-sandwichconstruction. The resultsfor CPT and SDPTarenearly identical
for thesolid-wall construction,asexpected.
55

CHAPTER V
CONCLUDING REMARKS
The VICONOPT computer code is an exact analysis and optimum design program
that includes the buckling and vibration analyses of prismatic assemblies of flat, in-plane-
loaded anisotropic plates. In the present report, the capability to analyze curved-plate
segments exactly has been added to the VICONOPT code. Non-linear curved-plate
equilibrium equations have been formulated using the principle of virtual work, and
linearized stability equations that describe the response of the plate just after buckling
occurs were derived following the application of several simplifying assumptions.
Finally, modifications to these equations were made to allow the reference surface of the
plate to be located at a distance zc from the centroidal surface.
The analysis methodology described in the present report improves upon the existing
methodology in the VICONOPT code (referred to herein as the segmented-plate analysis)
which requires that curved-plate segments be subdivided into several flat-plate elements
that must be subsequently joined at their longitudinal edges to approximate the curved-
plate geometry. The new analysis formulation allows either classical plate theory (CPT)
or first-order shear deformation plate theory (SDPT) to be used. Furthermore, anisotropic
laminates having fully populated A, B, and D stiffness matrices may be analyzed. The
analysis described in the present report is an example of an exact finite-strip method
(FSM) since it uses a stiffness matrix that is derived by direct solution to the stability
equations.
One additional capability that has been incorporated into the VICONOPT code as part
of the present report is the option to use plate elements (flat or curved) that are based
upon nonlinear strain-displacement relations that contain terms from either physical or
tensorial strain measures. A second capability that has been added is the ability to
56

includetheeffectof termsassociatedwith in-planetransverseandin-planeshearloading
in the in-planestability equations.Theoriginal VICONOPTcodeneglectstheseterms.
Resultsfrom the presentcurved-plateanalysiscapability comparevery well with a
closed-formsolutionandtheexistingsegmented-plateanalysisfor thebucklingof a long
isotropic cylinder. The present analysis also compareswell with results from the
literaturefor symmetricallylaminatedcurvedplateswith widely varying curvaturesand
with unsymmetricallylaminatedplatesthat includetheeffectof extensional-bendingand
shear-extensioncoupling. No appreciableeffects of using tensorial versusphysical
strainsarenotedin theseexamples.Thepresentcurved-plateanalysiswasalsoshownto
require significantly lesscomputationaleffort than the segmented-plateanalysis. An
alternateapproachfor the segmented-plateanalysisthat offers additional computational
savingsfor certainclassesof problemshasbeeninvestigated. However,this approach
requiresgreaterusereffort, andit is currentlynot implementedin theVICONOPTcode.
A significant effect of either including or neglectingthe terms associatedwith an
applied in-planetransverseloading(i.e., N= loading) in the in-planestability equations
wasnotedwhenanalyzinga long cylindrical tubesubjectedto uniform externalpressure.
Thesymmetryof thebuckling modefor this problemallowedit to be modeledasahalf
cylinder,andthepressureloadwassimulatedwith anequivalenthoop(N=) loading. The
bucklingresultsfor this problemwereshownto changeby a factorof 3/4whentheterms
associatedwith the N= loadingwere neglectedin the in-planestability equations.This
resultillustratestheeffect that thetreatmentof the in-planestability equationscanhave
on thebuckling resultsfor curvedplates.
Finally, the presentcurved-plateanalysiswasusedto conducta design-optimization
study of two different cylindrical shells subject to uniform axial compression(Nil
loading). Oneshellwasconstructedfrom a honeycomb-sandwichwall construction,and
theotherwasa solid-wall construction.The valuesof massfor theoptimizedsolid-wall
designwere consistentlyhigher than thosefor the honeycomb-sandwichconstruction.
57

However,therewasnodifferencebetweenresultsusingCPTandSDPTfor thesolid-wall
cylinder. Thevaluesof massfor theoptimizedhoneycomb-sandwichcylinderusingCPT
wereslightly lessthan thosefor SDPTasthe appliedloadingwas increased.However,
thevaluesof corethicknessfor theoptimizedhoneycomb-sandwichcylinderusingCPT
weresignificantly lessthan thosefor SDPTastheapplied loading wasincreased.This
trendoccurredbecauseCPT resultsin anoverly stiff approximationsincethe effectsof
transverse-shearflexibility are neglected. This overly stiff approximation results in
higherbucklingloadsand,thus,a loweroptimummass.
Oneareafor future work includesretaining the curvatureterms in the longitudinal
directionandimplementingthe capability to analyzeshellsof revolution. The analysis
canalsobemodified to allow vibrationanalysesto beperformed. Anotherenhancement
that canbemadeto the presentanalysisis to removetherestrictionthat whenthe terms
associatedwith in-planetransverseandin-planeshearloadingareretainedin the in-plane
stability equations,thecentroidalsurfaceandreferencesurfacemustcoincide.
58
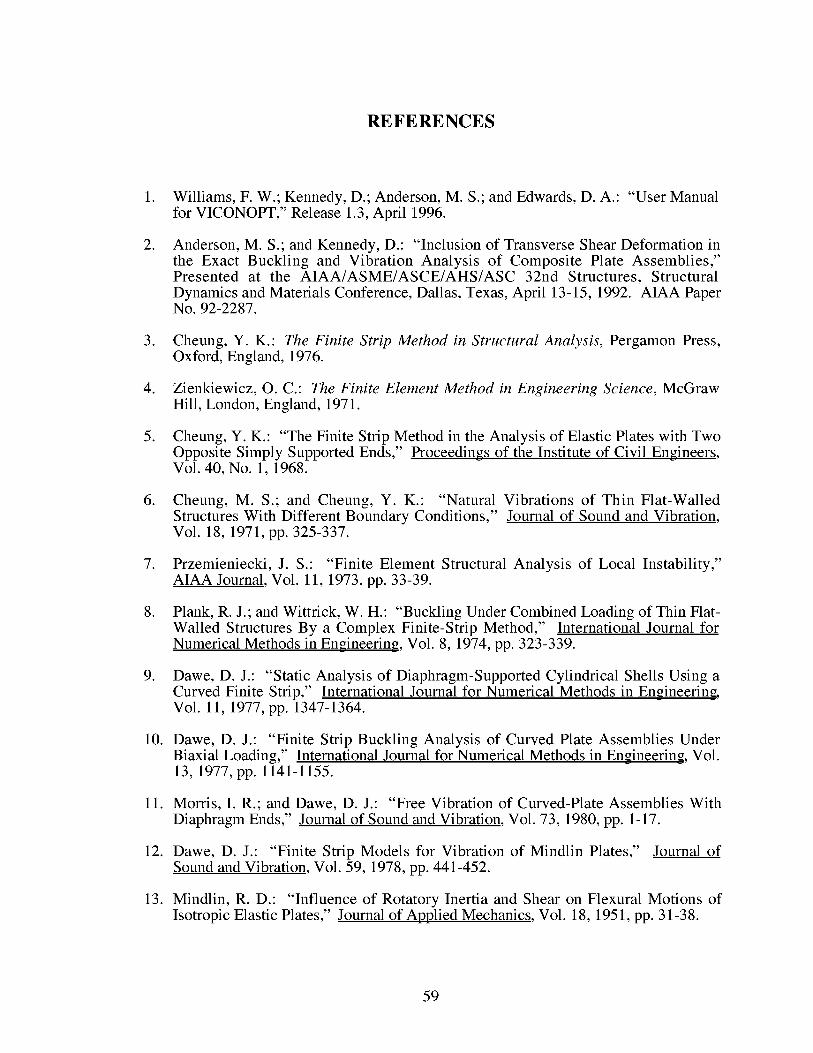
REFERENCES
1. Williams, F. W.; Kennedy, D.; Anderson, M. S.; and Edwards, D.A.: "User Manualfor VICONOPT," Release 1.3, April 1996.
. Anderson, M. S.; and Kennedy, D.: "Inclusion of Transverse Shear Deformation inthe Exact Buckling and Vibration Analysis of Composite Plate Assemblies,"Presented at the AIAA/ASME/ASCE/AHS/ASC 32nd Structures, StructuralDynamics and Materials Conference, Dallas, Texas, April 13-15, 1992. AIAA PaperNo. 92-2287.
3. Cheung, Y. K.: The Finite Strip Method in Structural Analysis, Pergamon Press,Oxford, England, 1976.
4. Zienkiewicz, O. C.: The Finite Element Method in Engineering Science, McGrawHill, London, England, 1971.
. Cheung, Y. K.: "The Finite Strip Method in the Analysis of Elastic Plates with TwoOpposite Simply Supported Ends," Proceedings of the Institute of Civil Engineers,Vol. 40, No. 1, 1968.
. Cheung, M. S.; and Cheung, Y. K.: "Natural Vibrations of Thin Flat-WalledStructures With Different Boundary Conditions," Journal of Sound and Vibration,Vol. 18, 1971, pp. 325-337.
7. Przemieniecki, J. S.: "Finite Element Structural Analysis of Local Instability,"AIAA Journal, Vol. 11, 1973, pp. 33-39.
. Plank, R. J.; and Wittrick, W. H.: "Buckling Under Combined Loading of Thin Flat-Walled Structures By a Complex Finite-Strip Method," International Journal forNumerical Methods in Engineering, Vol. 8, 1974, pp. 323-339.
. Dawe, D. J.: "Static Analysis of Diaphragm-Supported Cylindrical Shells Using aCurved Finite Strip," International Journal for Numerical Methods in Engineering,Vol. 11, 1977, pp. 1347-1364.
10. Dawe, D. J.: "Finite Strip Buckling Analysis of Curved Plate Assemblies UnderBiaxial Loading," International Journal for Numerical Methods in Engineering, Vol.13, 1977, pp. 1141-1155.
I 1. Morris, I. R.; and Dawe, D. J.: "Free Vibration of Curved-Plate Assemblies WithDiaphragm Ends," Journal of Sound and Vibration, Vol. 73, 1980, pp. 1-17.
12. Dawe, D. J.: "Finite Strip Models for Vibration of Mindlin Plates," Journal ofSound and Vibration, Vol. 59, 1978, pp. 441-452.
13. Mindlin, R. D.: "Influence of Rotatory Inertia and Shear on Flexural Motions ofIsotropic Elastic Plates," Journal of Applied Mechanics, Vol. 18, 1951, pp. 31-38.
59

14. Roufaeil,O.L.; andDawe,D.J.: "Vibration Analysisof RectangularMindlin Platesby theFinite StripMethod," Computers & Structures, Vol. 12, 1980, pp. 833-842.
15. Dawe, D. J.; and Roufaeil, O. L.: "Buckling of Rectangular Mindlin Plates,"Computers & Structures, Vol. 15, 1982, pp. 461-471.
16. Craig, T. J.; and Dawe, D. J.: "Flexural Vibration of Symmetrically LaminatedComposite Rectangular Plates Including Transverse Shear Effects," InternationalJournal of Solids and Structures, Vol. 22, No. 2, 1986, pp. 155-169.
17. Dawe, D. J.; and Craig, T. J.: "The Vibration and Stability of SymmetricallyLaminated Composite Rectangular Plates Subjected to In-Plane Stresses,"Composite Structures, Vol. 5, 1986, pp. 281-307.
18. Craig, T. J.; and Dawe, D. J.: "Vibration of Shear-Deformable Laminated PlateStructures by the Finite Strip Method," Computers & Structures, Vol. 27, No. 1,1987, pp. 61-72.
19. Dawe, D. J.; and Craig, T. J.: "Buckling and Vibration of Shear DeformablePrismatic Plate Structures by a Complex Finite Strip Method," International Journalof Mechanical Sciences, Vol. 30, No. 2, 1988, pp. 77-99.
20. Dawe, D. J.; and Peshkam, V.: "Buckling and Vibration of Finite-Length CompositePrismatic Plate Structures With Diaphragm Ends, Part I: Finite Strip Formulation,"Computer Methods in Applied Mechanics and Engineering, Vol. 77, 1989, pp. 1-30.
21. Peshkam, V.; and Dawe, D. J.: "Buckling and Vibration of Finite-Length CompositePrismatic Plate Structures With Diaphragm Ends, Part II: Computer Programs andBuckling Applications," Computer Methods in Applied Mechanics and Engineering,Vol. 77, 1989, pp. 227-252.
22. Dawe, D. J.; and Peshkam, V.: "Buckling and Vibration of Long Plate Structures byComplex Finite Strip Methods," International Journal of Mechanical Sciences, Vol.32, No. 9, 1990, pp. 743-766.
23. Wittrick, W. H.: "A Unified Approach to the Initial Buckling of Stiffened Panels inCompression," The Aeronautical Quarterly, Vol. 19, 1968, pp. 265-283.
24. Wittrick, W. H.; and Curzon, P. L. V.: "Stability Functions for the Local Bucklingof Thin Flat-Walled Structures with the Walls in Combined Shear and
Compression," Aeronautical Quarterly, November 1968, vol. 19, pp. 327-351.
25. Wittrick, W. H.: "General Sinusoidal Stiffness Matrices for Buckling and VibrationAnalysis of Thin Flat-Walled Structures," International Journal of MechanicalSciences, Vol. 10, 1968, pp. 949-966.
26. Smith, C. S.: "Bending, Buckling and Vibration of Orthotropic Plate-BeamStructures," Journal of Ship Research, Vol. 12, 1968, pp. 249-268.
60

27. Williams, F. W.: "Computationof NaturalFrequenciesandInitial Buckling Stressesof PrismaticPlateAssemblies," Journal of Sound and Vibration, Vol. 21, 1972, pp.87-106.
28. Wittrick, W. H.; and Williams, F. W.: "Buckling and Vibration of Anisotropic orIsotropic Plate Assemblies Under Combined Loadings," International Journal ofMechanical Sciences, Vol. 16, 1974, pp. 209-239.
29. Wittrick, W. H.; and Williams, F. W.:
Buckling Loads of Elastic Structures,"1973, pp. 497-518.
"An Algorithm for Computing CriticalJournal of Structural Mechanics, Vol. l,
30. Viswanathan, A. V.; and Tamekuni, M.: "Elastic Buckling Analysis For CompositeStiffened Panels and other Structures Subjected to Biaxial Inplane Loads," NASACR-2216, 1973.
31. Viswanathan, A. V.; Tamekuni, M.; and Tripp, L. L.: "Elastic Stability of BiaxiallyLoaded Longitudinally Stiffened Composite Structures," Proceedings of theAIAA/ASME/SAE 14th Structures, Structural Dynamics, and Materials Conference,Williamsburg, VA, March 20-22, 1973. AIAA Paper No. 73-367.
32. Viswanathan, A. V.; Tamekuni, M.; and Baker, L. L.: "Elastic Stability ofLaminated, Flat and Curved, Long Rectangular Plates Subjected to CombinedLoads," NASA CR-2330, 1974.
33. Williams, F. W.; and Anderson, M. S.: "Incorporation of Lagrangian Multipliersinto an Algorithm for Finding Exact Natural Frequencies or Critical BucklingLoads," International Journal of Mechanical Sciences, Vol. 25, 1983, No. 8, pp.579-584.
34. Anderson, M. S.; Williams, F. W.; and Wright, C. J.: "Buckling and Vibration ofany Prismatic Assembly of Shear and Compression Loaded Anisotropic Plates withan Arbitrary Supporting Structure," International Journal of Mechanical Sciences,Vol. 25, No. 8, 1983, pp. 585-596.
35. Kennedy, D.; and Williams, F. W.: "Vibration and Buckling of Anisotropic PlateAssemblies with Winkler Foundations," Journal of Sound and Vibration, Vol. 138,
No. 3, 1990, pp. 501-510.
36. Williams, F. W.; Kennedy, D.; and Anderson, M. S.: "Analysis Features ofVICONOPT, an Exact Buckling and Vibration Program for Prismatic Assemblies ofAnisotropic Plates," Proceedings of the 31st AIAA/ASME/ASCE/AHS/ASCStructures, Structural Dynamics and Materials Conference, Long Beach, California,pp. 920-929, April 1990. AIAA Paper 90-0970.
37. Butler, R.; and Williams, F. W.: "Optimum Design Features of VICONOPT, anExact Buckling and Vibration Program for Prismatic Assemblies of AnisotropicPlates," Proceedings of the 31st AIAA/ASME/ASCE/AHS/ASC Structures,Structural Dynamics and Materials Conference, Long Beach, California, pp. 1289-1299, April 1990. AIAA Paper 90-1068.
61

38. Sanders,J. L., Jr.: "An Improved First-Approximation Theory For Thin Shells,"NASA TR R-24,1959.
39. Sanders,J. L., Jr.: "Nonlinear Theoriesfor Thin Shells," Quarterly of AppliedMathematics, Vol. 21, 1963, pp. 21-36.
40. Wolfram, S.: MATHEMATICA: A System for Doing Mathematics by Computer,
Addison-Wesley Publishing Company, Inc., Redwood City, CA, 1988.
41. Novozhilov, V. V.: Foundations of the Nonlinear Theory of Elasticity, GraylockPress, Rochester, New York, 1963.
42. Stein, M.: "Nonlinear Theory for Plates and Shells Including the Effects ofTransverse Shearing," AIAA Journal, Vol. 24, No. 9, September 1986, pp. 1537-1544.
43. Shames, I. H. and Dym, C. L. : Energy and Finite Element Methods in EngineeringMechanics, Hemisphere Publishing Corporation, New York, New York, 1985.
44. Cohen, G. A.: "Transverse Shear Stiffness of Laminated Anisotropic Shells,"Computer Methods in Applied Mechanics and Engineering, Vol. 13, 1978, pp. 205-220.
45. Jones, R. M.: Mechanics of Composite Materials, Hemisphere Publishing Corp.,New York, New York, 1975.
46. Langhaar, H. L.: Energy Methods in Applied Mechanics, Kreiger PublishingCompany, Malabar, Florida, 1989.
47. Cohen, G. A.: "FASOR - A Second Generation Shell of Revolution Code,"
Computers & Structures, Vol. 10, 1979, pp. 301-309.
48. Shames, I. H.: Mechanics of Deformable Solids, Kreiger Publishing Company,Malabar, Florida, 1985.
49. Timoshenko, S. P.; and Gere, J. M.: Theory of Elastic Stability, McGraw-Hill Book
Company, New York, New York, 1961.
50. Simitses, G.J.: An Introduction to the Elastic Stability of Structures, KreigerPublishing Company, Malabar, Florida, 1986.
51. Anonymous: DuPont KOREX TM Honeycomb Core for High Performance
Applications, DuPont Technical Data Specification Sheet.
62

APPENDIX A
MATRICES FOR DETERMINING CHARACTERISTIC ROOTS
The eigenvalues of matrix R in Eq. (3.16a) are the characteristic roots of the
differential equations describing the behavior of the plate. The 10-by-10 matrix R is
calculated from the matrices T and P as shown in Eq. (3.16b). The non-zero elements of
the T matrix are
* * * * * *
t3, 3 = t4, 4 = t5, 5 = t6, 6 = t7, 7 = ts, 8 = t9, 9 = tl0,10 = 1
tl, 1 =I-(E h33N22-G__ h23N12 ) tl, 2 =-F h23N22 +G h33N12
t2,1 =-(E_ h23N22-G h22N12 ) t2, 2 =I-(F h22N22-G h23N12 )
t4,1 =E h35N22-G__ h25N12 t4, 2 =F h25N22-G_G - h35N12
t5,1 =-(E h36N22-G h26N12 ) t5, 2 =-__F h26N22 +G h36N12
* b( )t6,1 = E H h33N22N12-G H h23N122-E h13N22+G__ h12N12
t6,2 -b F H h23N22N 12-G H h33N22-F h12N22 +G h13N12 )
t7,1 =_-E H h23N22N12-G H h22N22-E__ N22
Ct(F H G H h23N22+G N12 )t7, 2 = _ h22N22N12 -
• _ _2
t8,1 =_-tl0,1 =-_-_-(E h34N22-_ - h24N12 )
• _ _2
t8, 2 =_t10,2 = -b-_-(__F h24N22-G__ h34N12 )
63

Theunderlinedtermsgiven aboveandsubsequentlyare thosetermsthat drop out of the
equationwhentheeffectsof N22andN12in thein-planestability equationsareneglected.
Thenon-zeroelementsof theP matrix are
* ( h 33N 12.)Pl,1 = -or h13 - H Pl,2 =-ct(1-H h23N12 )
Pl,3 =----b--h34- (__Fh23N22-__ - h33N12 )
Pl,5 = P10,6 = cth34 Pl,6 = -bh33
Pl,7 = P2,6 = -bh23 Pl,9 = -P4,6 = -bh35
P1,10 = P5,6 = -bh36 • ( )P2,1 = -or h12 - H h23N12
P2,2 = ct__H h22N12
P2,3 =b ct2h24
R 2 b
P2,5 = P10,7 = cth24
b (F h22N22-G h23N12 )R2
P 2,7 = - bh 22 P2,9 = -P4,7 = -bh25
P2,10 = P5,7 = -bh26• b
P3,2 - R2
ctN12h88
P3,3 = P8,8 - S
b
P3,4 =
bh 78
P3,5 = Plo,8 = S
ct cth 88
P3,10 = -P5,8 = -_P3,8 = S
• ( )P4,1 =Cthl5-H h35N12 P2,2 =-_H h25N12
64

* _2h45 b (F G )P4,3 = _- R_ h25N22--- h35N12
P4,5 = - _ P10,9 = _h45 P 4,9 = bh 55
P4,10 = -P5,9 = bh56 PS,1 = -ct(hl6 - H h36N12)
= -- + H _h26N12P5,2 R2 --
2
P5,3 = _---(h46 N12h88+ _ )- (F h26N22-G h36N12 )
P5,4 = ct+--S
/ 1178P5,5 = Pl0,10 = -_h46 + s)\
P5,10 = -bh66bS
Gt2
• -C___2bN11 __b__(h 11P6,1 - _2 +
+ 2Hh13N12 - H2h33N122)
:N,:(__+HD+_,:-" _:3N,:])P6,2 - b
* _3(-h14 +Hh34N12)+n_---_---(N12[Gh13-G Hh33N12+F H h23N22 ]P6,3 = 7
-F h12N22) +C_2NllZc
)v2
Gt2 (h Hh34N12) - C_2bNllzcP6,5 =y 14- )2
• ( )P6,6 = ct -h13 + Hh33N12 • ( )P6,7 = ct -h12 + Hh23N12
65
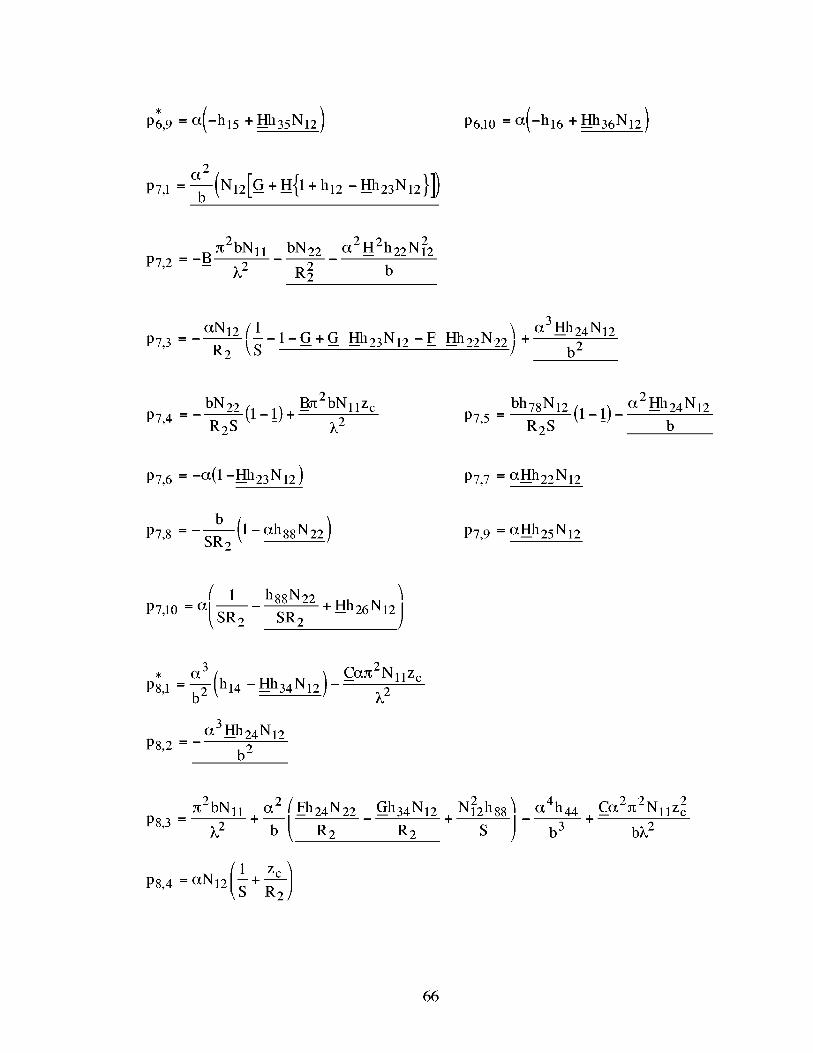
• ( )P6,9 = ct -h15 + Hh35N12 P6,10 = ct(-hl6 + Hh36N12)
Gt2
p_,__-_(N_[_+-{_+h_-"_h_3N_}])
_2bNll bN22 ct2 H2h22N22
P7,2 = -- _2 R2 b
P7,3 = ctN12 {1 )R2 _S -1-G+G Hh23N12-F Hh22N22. +
_3Hh24N12
b 2
B_2bN1 lZcbN22 (1-!)+
P7,4 = R2 S )2bh78N12 (1-1)-
P7,5 -
Gt2Hh24N12
P7,6 = -Ct(1-Hh23N12) P7,7 = _I-Ih22N12
b (1-cth88N22)P7,8 = SR 2
P7,9 = ctHh25N12
{ 1 h88N22 '_
P7,10 = ct_ + Hhz6N12SR 2 SR 2 )
Gt3• C_g2NllZc
P8,1 =_-(h14-Hh34N12) -- _2
ct3Hh24N12
P8,2 = b2
7t2bNll ct 2 {__Fh24N22 G__h34N12
P8,3 - )2 + _ R2 R2
P8,4 = ctN12 +
-I-N22h88 Gt4h44
S b 3
2C_2_2NllZc
+--
b)_2
66

P8,5=ctN12h78 ct3h44 Co:g2NllZc 2
+
S b 2 )v2
ct2h24 b
P8,7 - b R 2
cth88N12
P8,8 - S
ct2h45
P8,9 = b
P8,10 = ---
P9,2 =
or2 {h46 + h88N12b S )
B_2bNllZc
)v2 N12(,_P9,3 - S
bN22(l_ Zc ) ---_t2bNll z2P9,4- S -_2 + )v2P9,5 =
P9,8 b( 1 z_2 ) ( 1 z___ )= - P9,10 =-ct 1+_ S
_2 OI2bNllZc
Pl0,1 =--b-(h14-_Hh34N12) -- _2
Ct2 L-mth24N12
P10,2 = b
PlO,3 -
P10,4 -
_2 ct3h44 C---_g2N1 lZ2cth78N12s + (Fh24N22- Gh34N12 ) b2 I- )v2
bh78N22
S
P10,5 = bh77
2bh28N22 ct2h44 C___2bN1 lZc
+
S b )v2
where
_tb
)v
67

S = 1- h88N22
The expressionsfor the elementsof the T and P matricesfor the caseof classical
platetheoryareobtainedby settingthetransverse-shearstrains,_'13and_'23,equalto zero
1and using the resulting expression_)1= w,1 (recall that equals to zero). The
R1
partially invertedstress-strainrelationsgiven in Eq. (3.11),aremodified such that m12
and K_2are interchanged. For the classical case,only four stability equations,Eqs.
(2.16a), (2.16b), (2.16c), and (2.18a) are used since Eq. (2.18b) is satisfied by
incorporationinto thefinal form of Eq. (2.16c). The samestepsusedfor thetransverse-
shearcasearefollowed to generateT andP matricesof ordereight. The elementsof the
T andP matriceswith a superscript* givenpreviouslyfor thetransverse-shearcasealso
apply for theclassicalcaseif 1 is subtractedfrom any indexgreaterthan4. Thenon-zero
elementsof theT matrix thatarenot givenin theresultsfor transverseshearare
t6,1=_- E H h23N22N12-G H h22N122-E N22- Eh36N22-Gh26N12
t6, 2 = -b- F H h22N22N12-GH h23N22 +G N12-_2 [Fh26N22-Gh36N12])
t8,1 = -_(Eh36N22 - Gh26N12) t8, 2 = -_(Eh26N22 -Gh36N12)
The non-zero elements of the P matrix that are not given in the results for transverse
shear are
h36 )Pl,2 = -ct 1 + -_2 - --Hh23N12P 1,4 = -2cth 36
68

-_(h26 - H__h22N12 )P2,2 = _ R2
P3,4 = b
P4,4 = 2c£h56
P2,4 = -2c£h26
c£( h56 - Lm-Ih25N12P4,2 = _ R2
c£2N12 ( [ h36 ]) c£2h16P5,2- b G+H l+hlz+---H hz3N12R2 -- bR 2
-2c£2 (hi6 - Hh36N12 )P5,4 - b
c£2N12 ( [ h36 ]) c£2h16P6,1- _ G+H l+hlz+--R--7- 2 -H hz3N12 bR2
Gt2 { h66 ) -P6,2 =--_-_-_22 +H__N1212h26_H__h22N12] B_2bN11£2
C£3 (h46 + H__h24N12) + c£N12 (1 + G- GP6,3 = 7_ R2 R2
c£_Fh26N22 c£N12
R 2 R 2
Hh23N12 + F Gh36 ]Hh 22 N 22 + ----_2 ,)
2c£ 2 (h66 + H__h26N12 )P6,4 - b _ R 2bN22 (1-1)+
R2
__B_2bN1 lZc
_2
h36 )P6,5 = -c£ 1 + --R--7-2 - L_-Ih23N12 -_(h26 - Hh22N12)P6,6 = _ R2
bP6,7 = ---
R2 -_(h56 - Hh25N12)P6,8 = _ R2
69

ot 3 C._aI2N 1 lZc
P7,1 = 7(h14 ---Hh34N12)- L2
_3 (h46 +Hh24N12 )P7,2 = - b--T_ R2
P7,3 -_2bNll ct 2 ct4h44
)v2 + bR-----7( --Fh24 N 22 - GNlzh34) b 3
Cct2g2NllZ2+-
b)_2
2ct3h46 ctN12zc ct2h34
P7,4 = ctN12 b2 + P7,5 -R 2 b
ct2h24 b ct2h45
P7,6 - b R 2 P7,8 = b
= _2 [2- zcP8,1 y(hl6 _-_-2 ] - 2L_ 36 N 12.)
P8,2 = --- bR2 [h66 2 Zc - ---g2bNllZc
3h46(zc)( zc)+2 P8,3 = b2 2-R--72 +ctN121-R--72 R--7(Fh26N22-Gh36N12)
20t2h66 (2_ z_-_--2)(z-_-2) B--g2bNllZ2= +bN22 1- +P8,4 b )v2
p,,, p8,6: h26(2_
p8,8: h56(2_
70
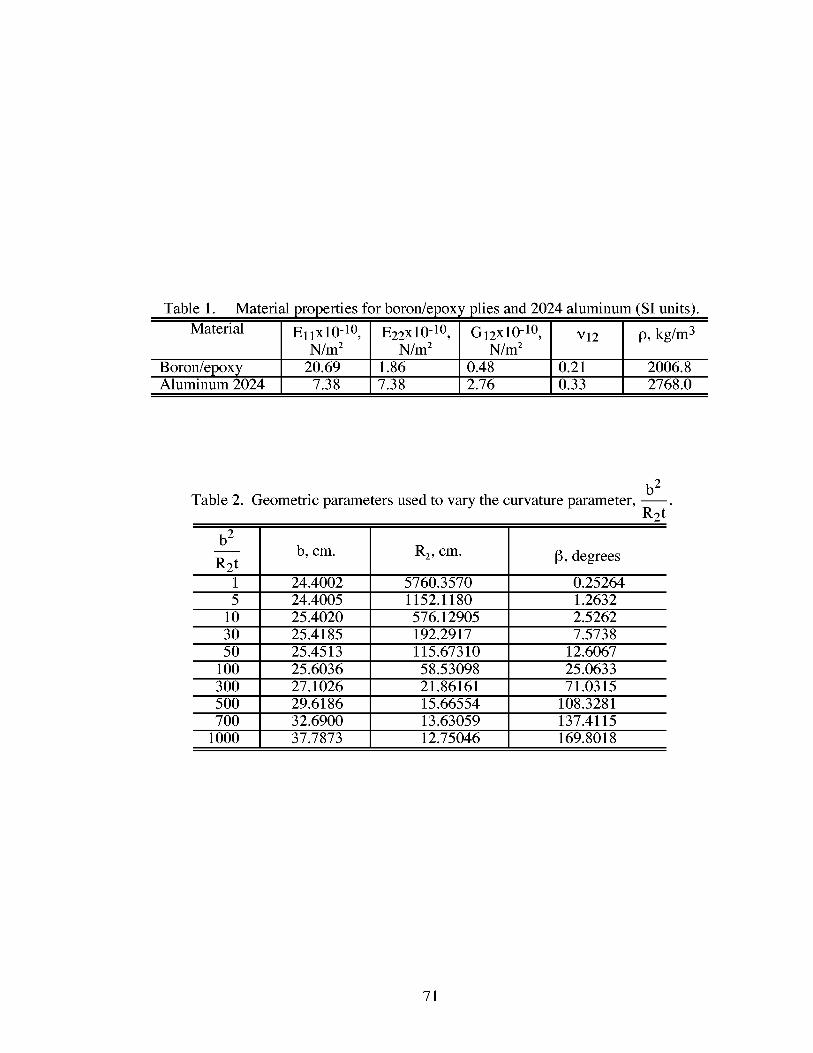
Table 1. Material properties for boron/epoxy plies and 2024 aluminum (SI units)•
Material Ell x 10-1°, E22 x 10-10, G12 x 10-10, v12 p, kg/m 3N/m 2 N/m 2 N/m 2
Boron/epoxy 20.69 1.86 0.48 0.21 2006.8Aluminum 2024 7.38 7.38 2.76 0.33 2768.0
Table 2. Geometric parameters used to vary the curvature parameter, --b 2
R2t
b 2
R2tb, cm. R2, cm. 13, degrees
1 24•4002 5760•3570 0•25264
5 24•4005 1152•1180 1•2632
10 25•4020 576•12905 2•5262
30 25•4185 192•2917 7•5738
50 25•4513 115•67310 12•6067
100 25•6036 58•53098 25•0633
300 27•1026 21•86161 71•0315
500 29•6186 15•66554 108•3281
700 32•6900 13•63059 137•4115
1000 37•7873 12•75046 169•8018
71

©
¢.,J
¢.,J
©
¢.,J
©
¢.,J
,.Q
Z
©
¢.,J
,.Q
©
¢.,J
¢--I¢¢3
Z
_._._._._._._._._._
72

_ Z
o _
©
©
z
73

©
©
Z
Z >-.
Z
©
t'-- _ _ t'--
Z
Z
¢¢3
_._._._._._._._._._
Z
74-

II
,.Q
©
Z
°_
• ©
II _
z _o_
Z _
_ •
___ _ "_
_'_'_'___
"__ Z
75

°,,-_
;>
©
©
..=
,.o
z
©
z _
©
¢¢3
z _ t_
t_
t'--
¢¢3
r',l _'-1
¢¢3
r',l t--
©
©
t"-I
z
©
76
©
©
¢¢3
zZ
¢'3
_',1 ¢'-I
¢_.-

II
oo rOo
_°o r_
=
::::3 _,_
"_ _,._ _ _
_ff ..dN
2
=
=
©
o
oo
©
=©
©
o
©
o° 11
o=
,,,,_ i
_ Z
0 =i =
_Z
Z
©
=i
c¢3i
C¢3i
t--c¢3i
C¢3i
77
_ o
,._'
_-_
_._
_'_'_'_'_'_'_'_
_._._._._.<.<._

II
©
(L) r_ °_
©
_wJ°,._
°,._
°_ _
E-
?S

Figure1.1 Typical longitudinallystiffenedplatestructures.
Figure1.2 Segmentedrepresentationof curved-plate geometry currently used byVICONOPT.
79

_3
_)1
m12 ml 1 m21
_3
............... \\
_1 _2
nl 1 n21 n22n12
Figure 2.1 Curved-plate geometry and sign convention for buckling displacements,rotations, moments, and forces.
80

_3
/// ",,"\
/" \',,.
N 11 N22
\\
\
\_2
_3
["/
//
_2
Figure 2.2 Sign convention for applied in-plane loads and relation of reference surfaceto centroidal surface.
81

tk
Zk
First lamina
b
kth lamina
Referencesurface
Figure 2.3 Curved laminate geometry.
82

Plate 1 Plate 2
*1 U2
W
*1
n
_----D--U2
_2
(a) plates 1 and 2 coplanar
*1 U2
U2 +O)l__
(b) plate 2 rotated to 0=+90 °
*1 U2
*n _w__ _2
+0
,1
(c) plate 2 rotated to arbitray angle, 0
Figure 3.1 Displacements and rotations at a typical plate junction.
83

Nil
p,
p,
p,
i ............
I-
I-
I-
Figure 4.1
E = 10.0x 106 psi
v12 = 0.33
p = 0.1 lb/in. 3
Long isotropic (aluminum) cylinder subjected to uniaxial compression.
84

1100-
1000
900
Nllcr' 800lb/in.
700
600
_k/--- Theoreticalresult(Ref.[48]). m
Curved-plate analysis j
500 I I I I I I I I0 20 40 60 80 100 120 140 160
Number of segments
Figure 4.2 Convergence of VICONOPT segmented-plate results as a function of thenumber of segments used in the approximation.
85

NormalizedCPUtime
Figure4.3
25-
20-
15-
10-
5-
0
Segmented-platetheoryCPUtimesnormalizedwith respectto curved-platetheorytime
- - Segmented-platetheory,SDPTSegmented-platetheory,CPT
J
/
/
/
/
I"
J
J
f
j.
J
j.
J
J
s j
'_'7 ......... i......... i ........ i ......... i ......... i20 40 60 80 100 120 140 160
Number of segments
Normalized CPU time requirements for the segmented-plate approach as afunction of the number of segments used in the approximation.
86

N22
N12
Nll
Figure 4.4 Positive applied in-plane loads on a long, curved plate.
nominal ply
kness004cm_" .............. b ..........._ _._...Boron/epoxy
[0/90/-+45]s
25.4 cm --
Figure 4.5 Symmetrically laminated curved plate with clamped longitudinal edgessubjected to applied in-plane loads.
87

Nil
105
65
4
Nll 3cr,
N/m 2
104
103
1
Figure 4.6
..... Curved-plate theory, physical strains __- - Segmented-plate theory, physical strains _-
---- Curved-plate theory, tensorial strains j_
........ I ........ I ........ I2 3 4 5 67 2 3 4 5 67 2 3 4 567
10 100 1000
Curvature parameter, b2/R2t
Critical value of stress resultant Nil for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
88

N22
1049
8
7
6
N22cr, 5
N/m4 ..... Curved-plate theory, physical strains
- - Segmented-plate theory, physical strains- - - Curved-plate theory, tensorial strains
Reference [32]
_n3 ........ I ........ I ........ IJLV 2 3 4 5 67 2 3 4 567 2 3 4 567
1 10 100 1000
Curvature parameter, b2/R2t
Figure4.7 Critical value of stress resultant N22 for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
89

N12
1059
8
7
4
N12cr '
N/m 3
104
Figure 4.8
..... Curved-plate theory, physical strains- - Segmented-plate theory, physical strains _"- - - Curved-plate theory, tensorial strains
........ I ........ I ........ I2 3 4 5 67 2 3 4 567 2 3 4 567
1 10 100 1000
Curvature parameter, b2/R2t
Critical value of stress resultant N12 for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
90

1049
8
7
N 6cr, 5
N/m4
..... Curved-plate theory, physical strains- - Segmented-plate theory, physical strains- - - Curved-plate theory, tensorial strains
Reference [32]
_-1_13,_, ........ I ........ I ........I
2 3 4 5 67 2 3 4 567 2 3 4 5671 10 100 1000
Curvature parameter, b2/R2t
Figure 4.9 Critical value of stress resultant Nll=N22=N12 for buckling of a symmetricallylaminated curved plate with clamped longitudinal edges.
91

ul andw = 0
on longitudinaledges76.2cm. /
25.4 cm.
Section A-A
+45 ° B/E _ I,,
,,-o D,,_ _-___, 0.014 cm.-a'l'3 D/lff_ _ (typical)
+45 ° B/E
-45 o B/E _" _ _, . _tAmminum " 0.0508 cm.
Figure 4.10 Unsymmetrically laminated aluminum and boron/epoxy (B/E) curvedplate with simply supported edges subjected to applied in-plane loads.
92

N1 lcr '
N/m
250,000 -
200,000 -
150,000 -
100,000 -
50,000 -
..... Curved-plate theory, physical strains- - Segmented-plate theory, physical strains /- - - Curved-plate theory, tensorial strains /"
I I I I I I I0 2 4 6 8 10 12 14
Number of boron/epoxy plies
Figure 4.11 Critical value of stress resultant Nll for buckling of an unsymmetricallylaminated aluminum and boron/epoxy (B/E) curved plate with simplysupported longitudinal edges.
93

N12
140,000-
120,000-
100,000-
N12cr,80,000-N/m
60,000-
40,000 -
20,000-
..... Curved-platetheory,physicalstrains- - - Segmented-platetheory,physicalstrains- - Curved-platetheory,tensorialstrains
Reference[32]
All VICONOPTresults
Reference[32]
I I I I I I I0 2 4 6 8 10 12 14
Numberof boron/epoxyplies
Figure4.12 Critical value of stressresultantN12 for buckling of an unsymmetricallylaminated aluminum and boron/epoxy (B/E) curved plate with simplysupported longitudinal edges.
94

External pressure, p
t=O.1 in.
R2 = 10.0 in.
N22, equivalent
hoop load
ul restrained along longitudinal edges
E = 10.0x 106 psi
3/12-- 0.33
p = 0.1 lb/in 3
N22, equivalent
hoop load
Figure 4.13 Isotropic (aluminum) long cylindrical tube subjected to uniform externalpressure loading.
95

Nil
Simply supported
S ends 2
240 in.
Section A-ASolid wall
I O. 1 in. nom.T
/
' iAluminum
Section A-A
Honeycomb sandwich
0.5 in. nom.
0.1in. nom. l _ l
Aluminum _ /- KorexTM
facesheets honeycomb core
Figure 4.14 Cylindrical shell subjected to uniform axial compression (Nll loading).
96
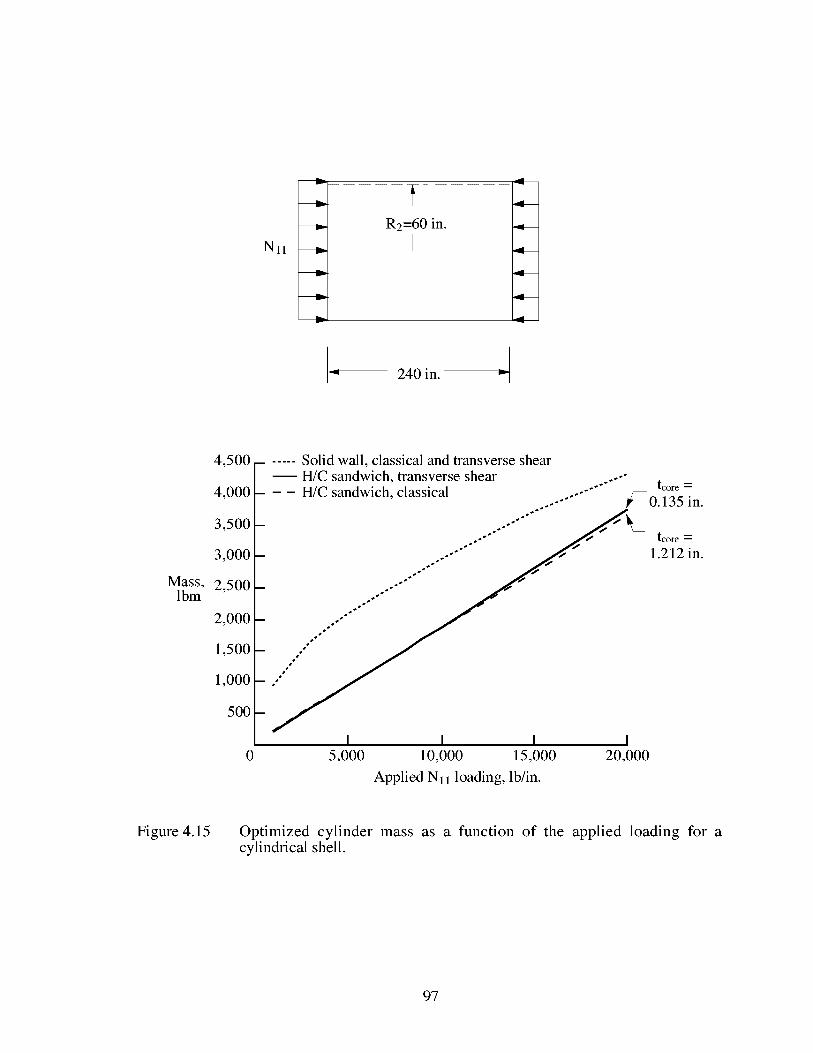
Nil
w__
mllb
mira,.
mlb,
mlb,
Re=60 in.
"' 240 in.
Mass,lbm
4,500
4,000
3,500
3,000
2,500
2,000
1,500
1,000
5OO
...... Solid wall, classical and transverse shear
H/C sandwich, transverse shear ..... ..-- tcore =
- - - H/C sandwich, classical ...... _ 0.135 in.
.-"'" tcore =
- ..-" 1.212 in.
s _
s
s t
s S
I I I I5,000 10,000 15,000 20,000
Applied Nll loading, lb/in.
Figure 4.15 Optimized cylinder mass as a function of the applied loading for acylindrical shell.
97

REPORT DOCUMENTATION PAGE FormApprov_{?M[_ NR, ft7fH-ftlt:lt:l
Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing datasources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any otheraspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations andReports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188),
Washington, DO 20,503.1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES COVERED
August 1999 Technical Memorandum4. TITLE AND SUBTITLE 5. FUNDING NUMBERS
Development of Curved-Plate Elements for the Exact Buckling Analysis ofComposite Plate Assemblies Including Transverse-Shear Effects WU 522-11-41-01
6, AUTHOR(S)
David M. McGowan
7, PERFORMING ORGANIZATION NAME(S) AND ADDRESS(ES)
NASA Langley Research Center
Hampton, VA 23681-2199
9, SPONSORING/MONITORING AGENCY NAME(S) AND ADDRESS(ES)
National Aeronautics and Space Administration
Washington, DC 20546-0001
8. PERFORMING ORGANIZATIONREPORT NUMBER
L-17882
10, SPONSORING/MONITORINGAGENCY REPORT NUMBER
NASA/TM- 1999-209512
11.SUPPLEMENTARYNOTESThe work in this report was submitted to the faculty of Old Dominion University in partial fulfillment of the
requirements for the degree of Master of Science, Engineering Mechanics, in May 1997.
12a, DISTRIBUTION/AVAILABILITY STATEMENT
Unclassified-Unlimited
Subject Category 39 Distribution: Nonstandard
Availability: NASA CASI (301) 621-0390
12b, DISTRIBUTION CODE
13. ABSTRACT (Maximum 200 words)
The analytical formulation of curved-plate non-linear equilibrium equations including transverse-shear-deformation effects is presented. A unified set of non-linear strains that contains terms from both physical and
tensorial strain measures is used. Linearized, perturbed equilibrium equations (stability equations) that describethe response of the plate just after buckling occurs are derived. These equations are then modified to allow the
plate reference surface to be located a distance zc from the centroidal surface. The implementation of the newtheory into the VICONOPT exact buckling and vibration analysis and optimum design computer program is
described. The terms of the plate stiffness matrix using both classical plate theory (CPT) and first-order shear-deformation plate theory (SDPT) are presented. The effects of in-plane transverse and in-plane shear loads are
included in the in-plane stability equations. Numerical results for several example problems with differentloading states are presented. Comparisons of analyses using both physical and tensorial strain measures as well
as CPT and SDPT are made. The computational effort required by the new analysis is compared to that of theanalysis currently in the VICONOPT program. The effects of including terms related to in-plane transverse and
in-plane shear loadings in the in-plane stability equations are also examined.
14. SUBJECT TERMS
Curved plates, buckling, transverse shear deformation, composites,
optimization, finite strips
17. SECURITY CLASSIFICATION 18. SECURITY CLASSIFICATION 19. SECURITY CLASSIFICATIONOF REPORT OF THIS PAGE OF ABSTRACT
Unclassified Unclassified Unclassified
NSN 7540-01-280-5500
15. NUMBER OF PAGES
11216. PRICE CODE
A0620, LIMITATION
OF ABSTRACT
UL
Standard Form 298 (Rev. 2-89)Prescribed by ANSI Std. Z-39-18298-102



![Vibration modes of a single plate with general boundary ... · Vibration modes of a single plate ... Leissa [5] published basic review of plate vibration. Exact solution of free vibration](https://static.fdocuments.in/doc/165x107/5f5ee8b458dfdc1e0a53104f/vibration-modes-of-a-single-plate-with-general-boundary-vibration-modes-of-a.jpg)














