
Development of a wireless manual guidance device for intuitive ...
24
from research .… to market Intelligent and Autonomous Robot Systems Development of a wireless manual guidance device for intuitive programming of industrial robot and additional examples Claudio Cenati Milano, February 2015
Transcript of Development of a wireless manual guidance device for intuitive ...

from research .… to market
Intelligent and Autonomous Robot Systems
Development of a wireless manual guidance
device for intuitive programming of
industrial robot and additional examples
Claudio Cenati
Milano, February 2015

Development of a wireless manual guidance device for intuitive programming of industrial robot and additional examples
1. ITIA-CNR Short Introduction
2. ITIA-CNR transfer technology model
3. 3 successful cases

Development of a wireless manual guidance device for intuitive programming of industrial robot and additional examples
1. ITIA-CNR Short Introduction
2. ITIA-CNR transfer technology model
3. 3 successful cases

ITIA is part of
the DIITET,
Department
for
Engineering,
ICT, Energy
and
Transportation
Technologies
of CNR
110
People
90
Researchers
Production
Systems
Factory
Automation
Robotics
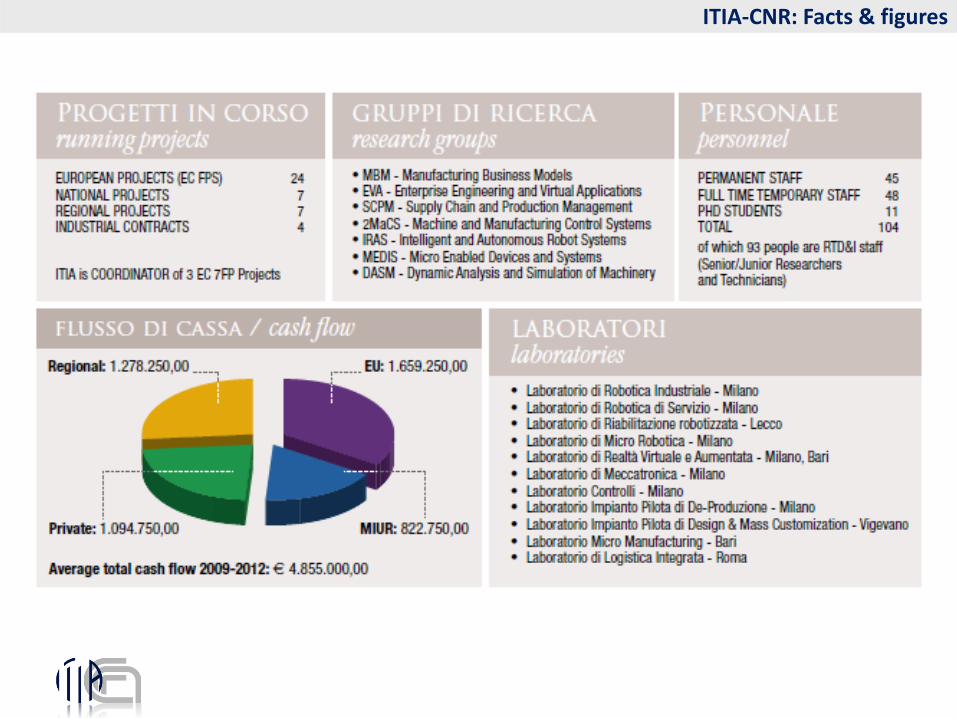
ITIA-CNR: Facts & figures

ITIA-CNR: RTD&I units

Principal Investigator L. Molinari Tosatti
IRAS: Facts & figures
25 people
1 Senior Researcher
8 Researcher
1 Post-doc
12 Fellow Researchers
(6 PhD students)
2 Technicians
MS (<5)
Labs
- 1 shopfloor
- 1 pilot plant for the de/re-manufacturing of mechatronic device
- 1 laboratory for the development of sensors and devices
- 1 laboratory for the testing of special prototypes (now a multi-robot
system for neuro-surgical application is installed)
- 1 laboratory @ Università degli Studi di Brescia
- 1 laboratory @ Villa Beretta Hospital (Rehabilitation Robotics)
EU Projects (ongoing)
H2020-FourByThree
FP7 - FlexiCAST
FP7 - ACTIVE
FP7 - ENEPLAN
FP7 - RampCo
LinArm++
(ECHORD++ exp.)
FP7 - EuRoC
Industrial Contracts: 170k€/year
Tot. Fund raising: 860k€/year
Italian Projects:
Progetto FdF
Pro2Evo
FACTOTHUMS
FIDEAS
Riprendo
Cluster-FI
HAF
Think&go

Principal Investigator
IRAS: Main activities
sensors
monitoring devices
Industrial controllers
modeling & control of
robot-based industrial processes
robot systems
safety
human-robot interaction
Robotics & interactive systems for
rehabilitation
civil
&
aerospace
applications
1. Coding and Software Engineering
2. Sensors and Devices
3. Planning and Control
4. Safe Human-Robot Interaction
5. Medical Robotics
L. Molinari Tosatti

Development of a wireless manual guidance device for intuitive programming of industrial robot and additional examples
1. ITIA-CNR Short Introduction
2. ITIA-CNR transfer technology model
3. 3 successful cases

ITIA-CNR technology transfer model

ITIA-CNR technology transfer model

Terms: • Patent right selling • Identification of the patent economic value • Inventor protection strategies • Definition of a royalties fee based policy for each item sold • Definition of a royalties fee based policy for each item integrated
into a commercial product
ITIA-CNR technology transfer model

ITIA-CNR technology transfer model

ITIA-CNR technology transfer model

ITIA-CNR technology transfer model

Development of a wireless manual guidance device for intuitive programming of industrial robot and additional examples
1. CNR-ITIA Short Introduction
2. ITIA transfer technology model
3. 3 successful cases
CASE N1: MANUAL GUIDANCE DEVICE
The IDEA started during SMErobot™ Project
SMErobot™ was an Integrated Project within the 6th Framework
Programme of the EC to create a new family of SME-suitable robots and
to exploit its potentials for competitive SME manufacturing (March 2005 -
May 2009).
Research and development in SMErobot™ is geared towards creating
the following technical innovations:
• Robot capable of understanding human-like instructions (by voice,
gesture, graphics)
• Safe and productive human-aware space-sharing robot (cooperative,
no fences)
• Three-day-deployable integrated robot system (modular plug-and-
produce components)
STEP 1 – Investigation

CASE N1: MANUAL GUIDANCA DEVICE
low cost plug and play device
wireless communication
sensitivity selector
show actual pose
manual guidance
state monitor
translation/rotation
selector lock
movement type
selector
start the program
Move joint (..,..,..,..,..,..) Move joint (..,..,..,..,..,..) MoveLinear (..,..,..,..,..,..) …..
path debug
step front / step back
monitor
user ad-hoc interface for the post processing
USER
ROBOT

CASE N1: MANUAL GUIDANCA DEVICE
STEP 2 – Pre-industrial prototype
Research on:
• Investigation of MANUAL GUIDANCE
using FORCE SENSOR
• Investigation of SENSOR-LESS cartesian/joint
MANUAL GUIDANCE
• First concept for High Level Programming
Results:
• Implementation on COMAU Controller C++
• Implementation of SENSOR-LESS Cartesian/joint
MANUAL GUIDANCE
EXPERIMENTS PERFORMED USING COMAU ROBOT @ COMAU LABS
sensitivity selector
show actual pose
manual guidance
state monitor
translation/rotation
selector lock
movement type
selector
start the program
Move joint (..,..,..,..,..,..) Move joint (..,..,..,..,..,..) MoveLinear (..,..,..,..,..,..) …..
path debug
step front / step back
monitor

CASE N1: MANUAL GUIDANCA DEVICE
STEP 3 – Pre-industrialization
Research on:
• Investigation of alternative methods for MANUAL GUIDANCE
based on 6D OPTICAL SENSOR MOUSE
• Investigation of wireless connection with robot controller
Results:
• Implementation on COMAU Controller C++
• Implementation of a wired device based on 6D Optical
sensor mouse with on board processing electronics
• First HMI Implementation on Special Teach Pendant
Special Teach Pendant
6D OPTICAL MOUSE

CASE N1: MANUAL GUIDANCA DEVICE
M G D :-)
. Wireless teach pendant
. User interface for EASY
and INTUITIVE
PROGRAMMING
. Bluetooth communication
channel
. Embedded 6DOF optical
device
. Linux-Xenomai
. Bluetooth communication RESULT
MANUAL GUIDANCE DEVICE WIRLESS Patent No. 08425778.1 2206
Year 2009
STEP 3 - Industrialization
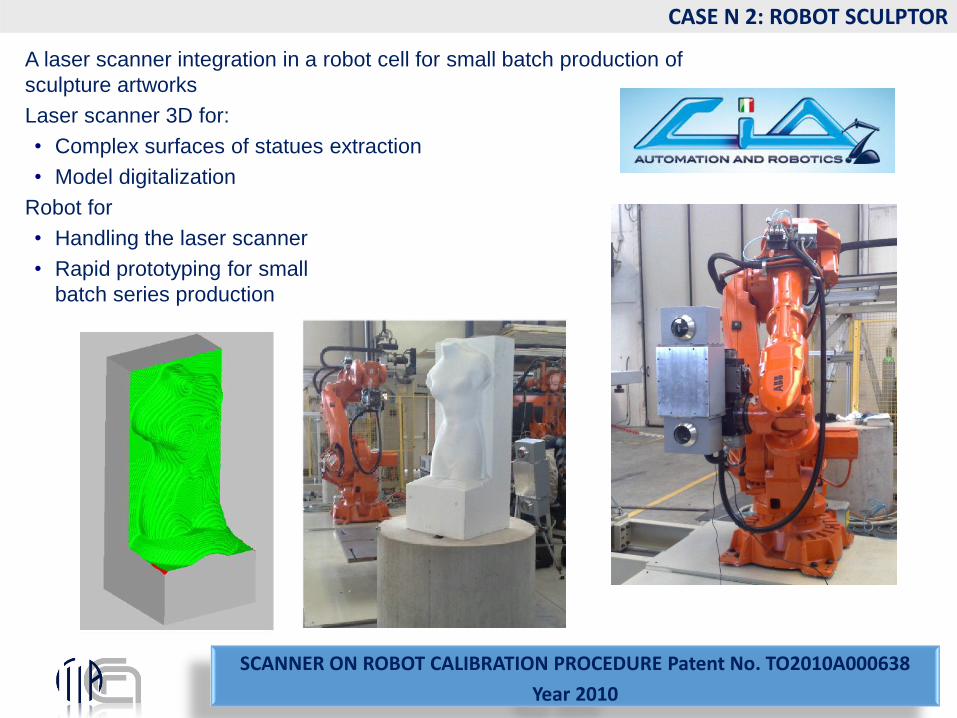
CASE N 2: ROBOT SCULPTOR
A laser scanner integration in a robot cell for small batch production of
sculpture artworks
Laser scanner 3D for:
• Complex surfaces of statues extraction
• Model digitalization
Robot for
• Handling the laser scanner
• Rapid prototyping for small
batch series production
SCANNER ON ROBOT CALIBRATION PROCEDURE Patent No. TO2010A000638
Year 2010

CASE N 3: LASER CUTTING CONTROL
Implementation of a method for controlling a laser cutting process and a laser cutting system.
METHOD IMPLEMENTED Patent No. WO 2012/143899 A1
Year 2012

from research .… to market
Intelligent and Autonomous Robot Systems
Development of a wireless manual guidance
device for intuitive programming of
industrial robot and additional examples
Claudio Cenati
Milano, February 2015


















