Designing and Fabricating Mechanical Automata from Mocap ...
90
Designing and Fabricating Mechanical Automata from Mocap Sequences Duygu Ceylan Wilmot Li Niloy J. Mitra Maneesh Agrawala Mark Pauly
Transcript of Designing and Fabricating Mechanical Automata from Mocap ...
Designing and Fabricating Mechanical Automata from Mocap Sequences
Duygu Ceylan Wilmot Li Niloy J. Mitra
Maneesh Agrawala Mark Pauly
Mechanical Automata
Mechanical Automata
Time Piece - Switzerland
Mechanical Automata
Time Piece - Switzerland
The Writer (designed by Jaquet-Droz)
Mechanical Automata
Time Piece - Switzerland
The Writer (designed by Jaquet-Droz)
windup toys

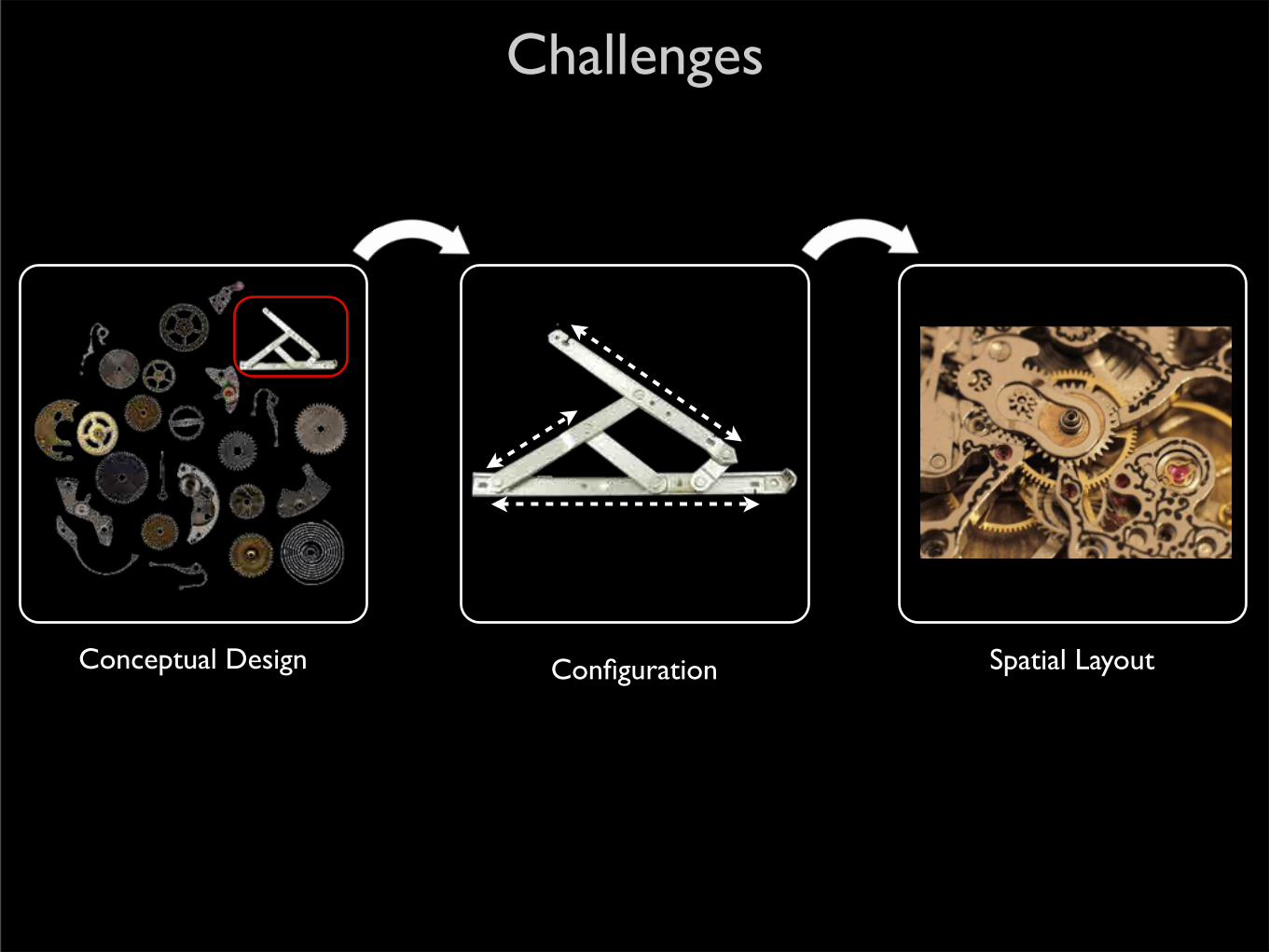
Challenges
Conceptual Design
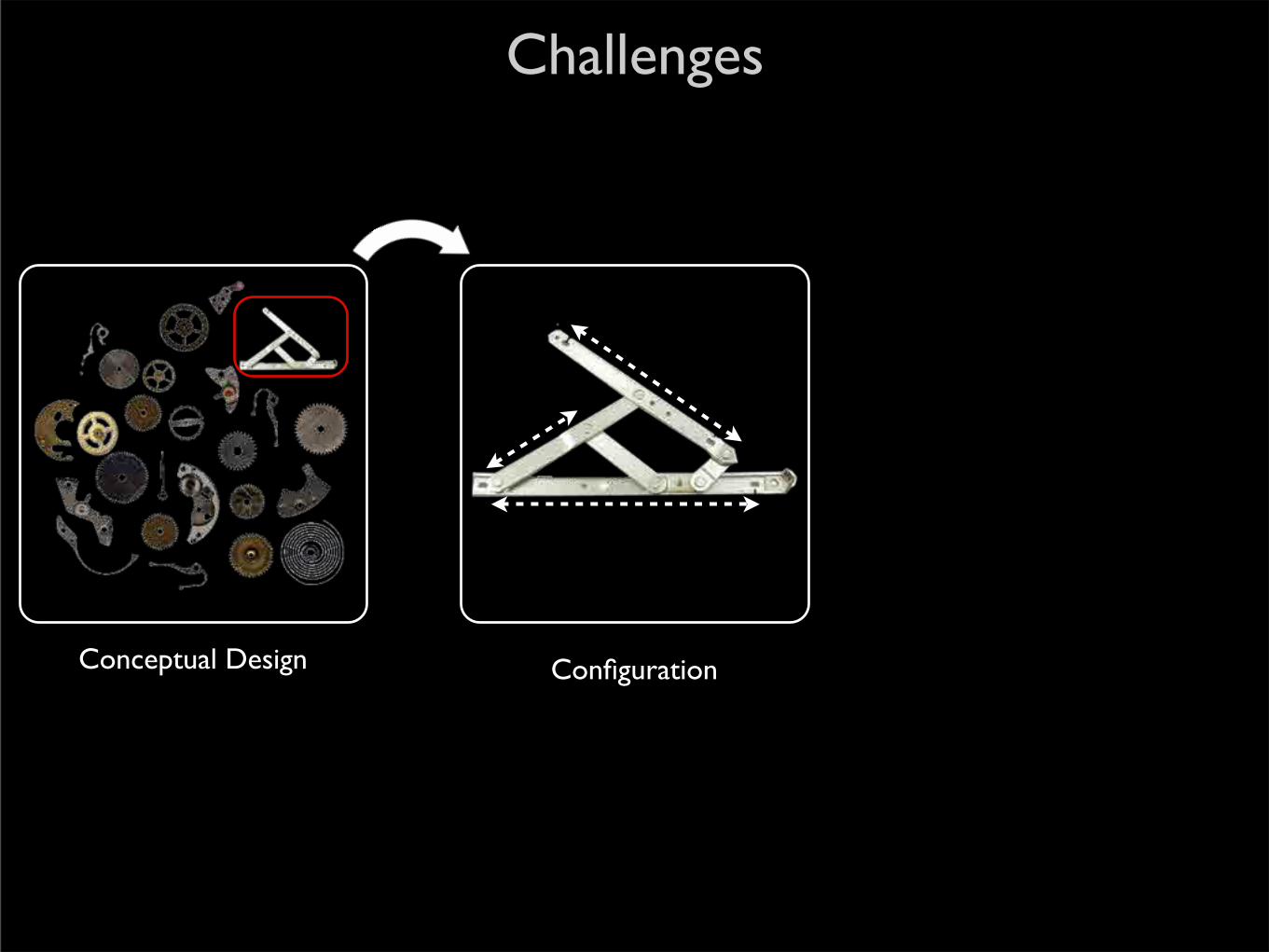
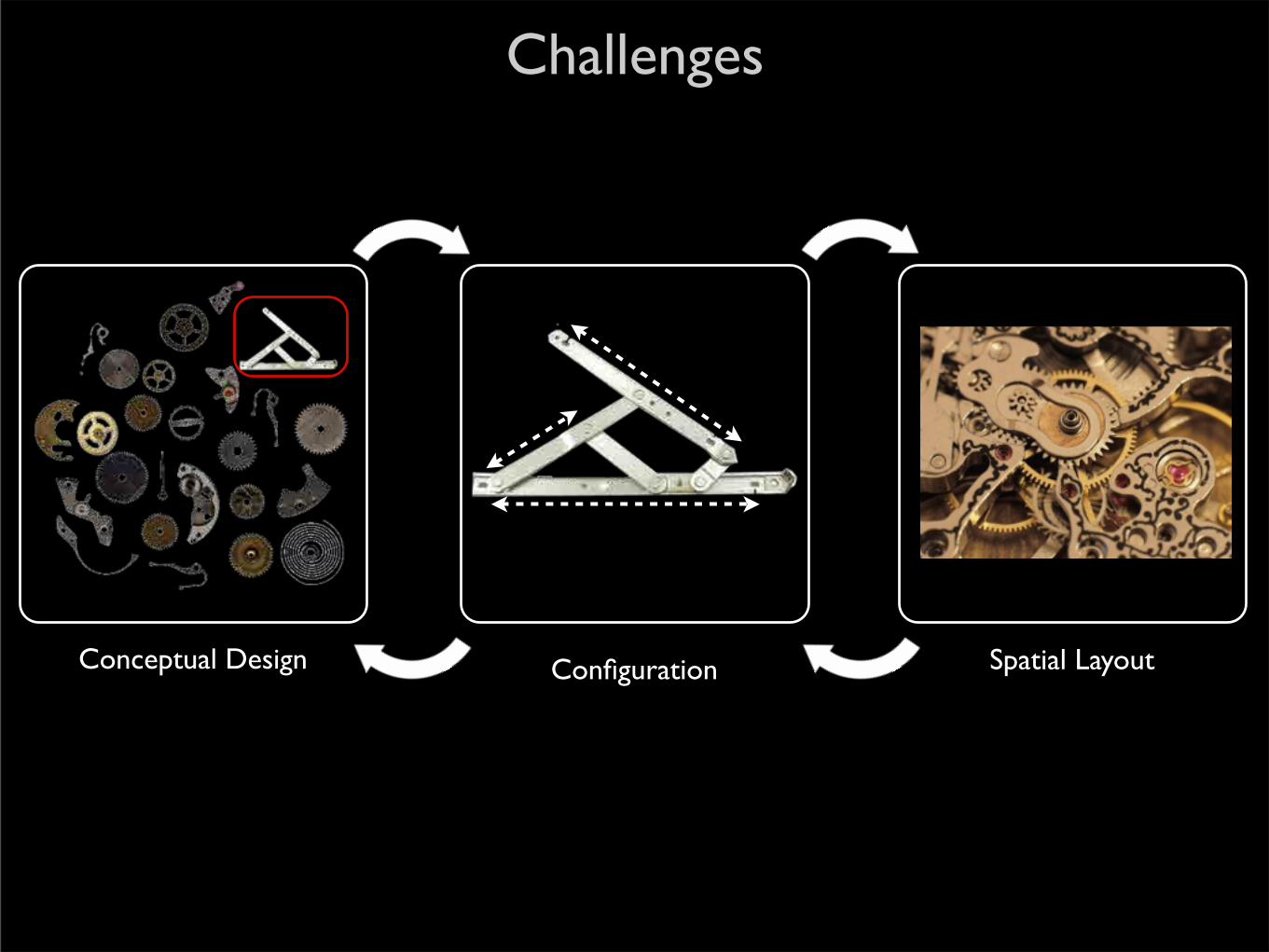
Challenges
Conceptual Design Configuration
Challenges
Conceptual Design Spatial LayoutConfiguration
Challenges
Conceptual Design Spatial LayoutConfiguration
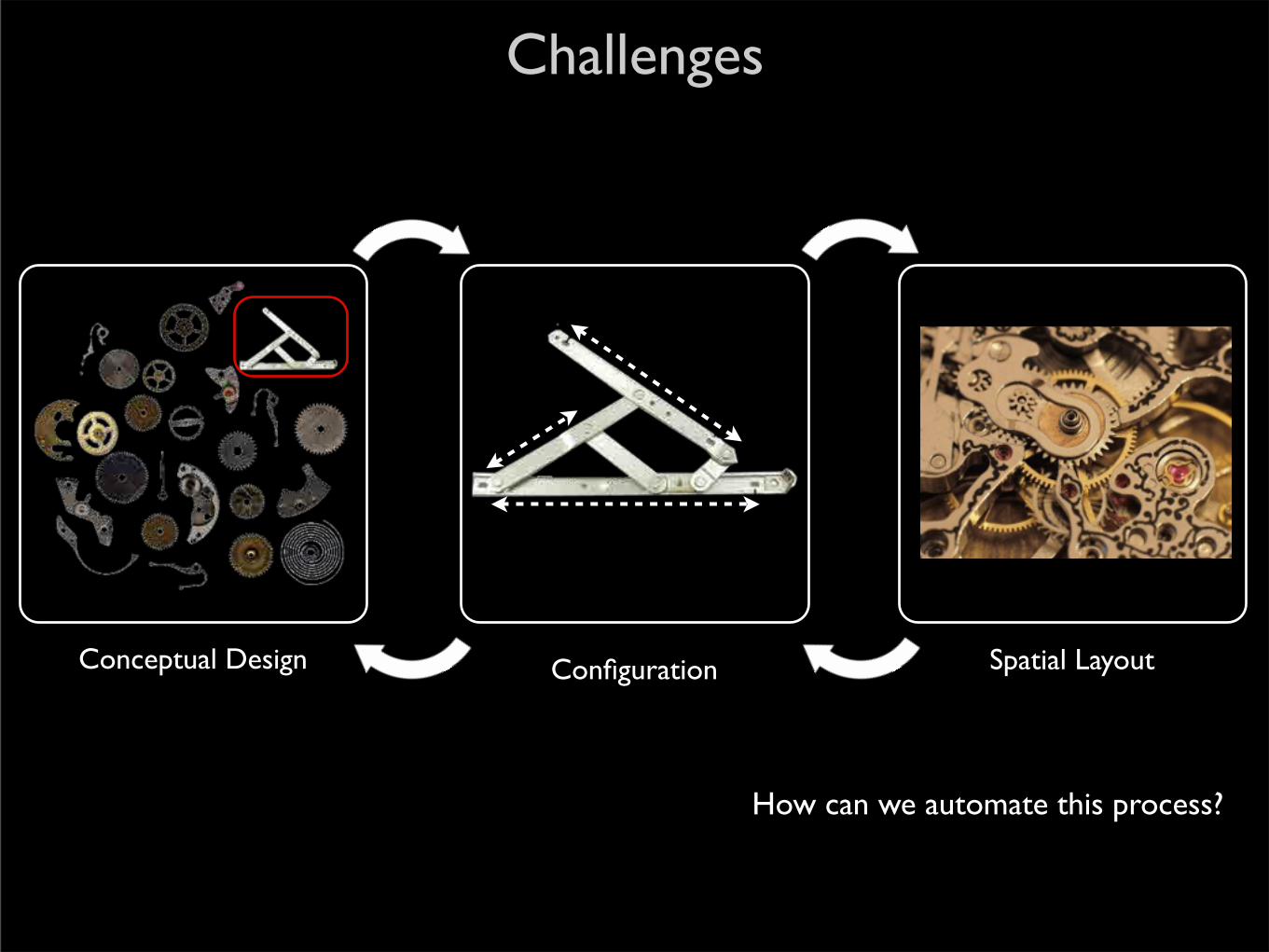
Challenges
Conceptual Design Spatial LayoutConfiguration
How can we automate this process?
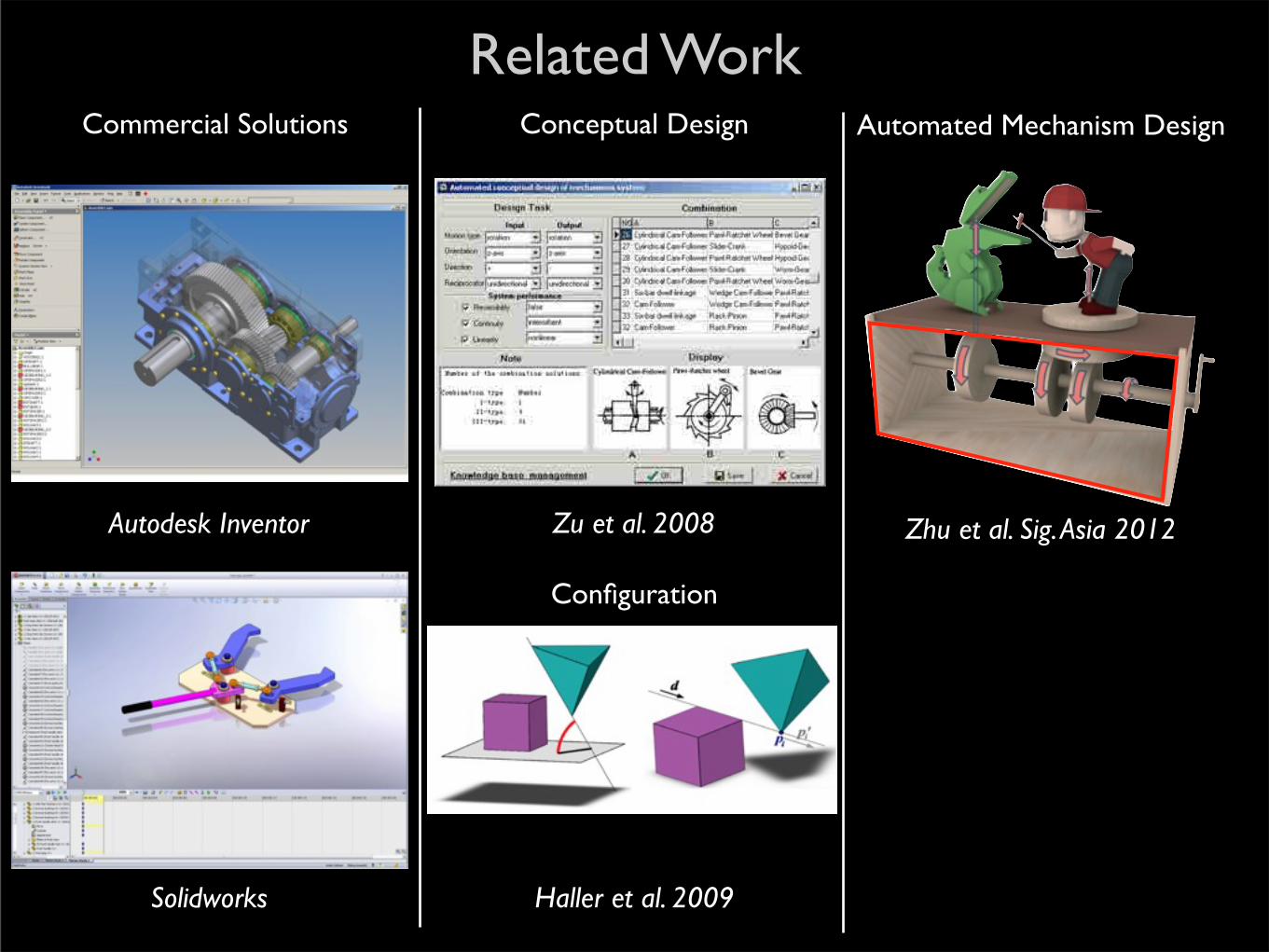
Related Work
Related WorkCommercial Solutions
Autodesk Inventor
Solidworks
Related WorkCommercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Related WorkCommercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Haller et al. 2009
Configuration
Related WorkCommercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Zhu et al. Sig. Asia 2012
Automated Mechanism Design
Haller et al. 2009
Configuration
Related WorkCommercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Zhu et al. Sig. Asia 2012
Automated Mechanism Design
Haller et al. 2009
Configuration
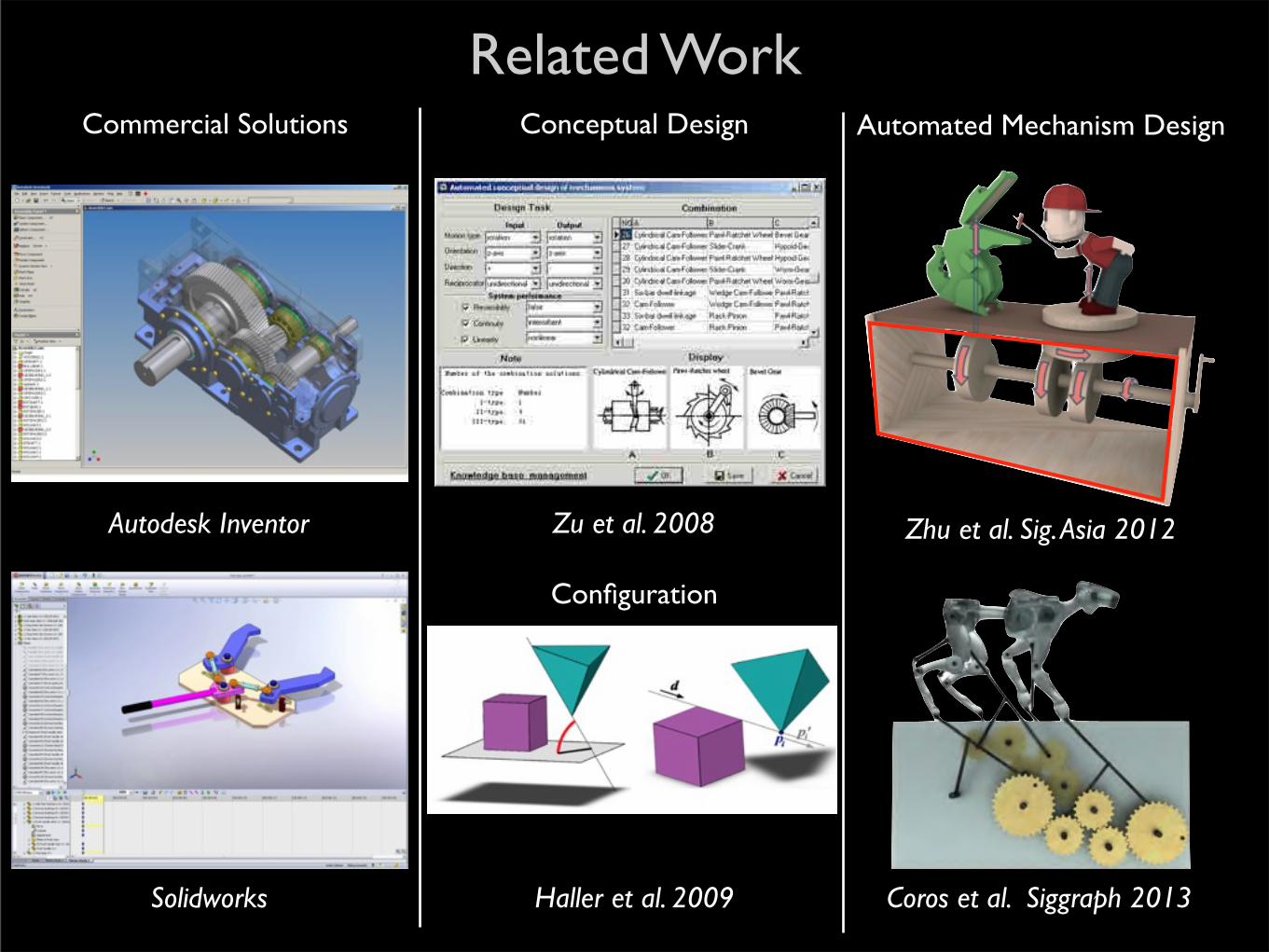
Related Work
Coros et al. Siggraph 2013
Commercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Zhu et al. Sig. Asia 2012
Automated Mechanism Design
Haller et al. 2009
Configuration
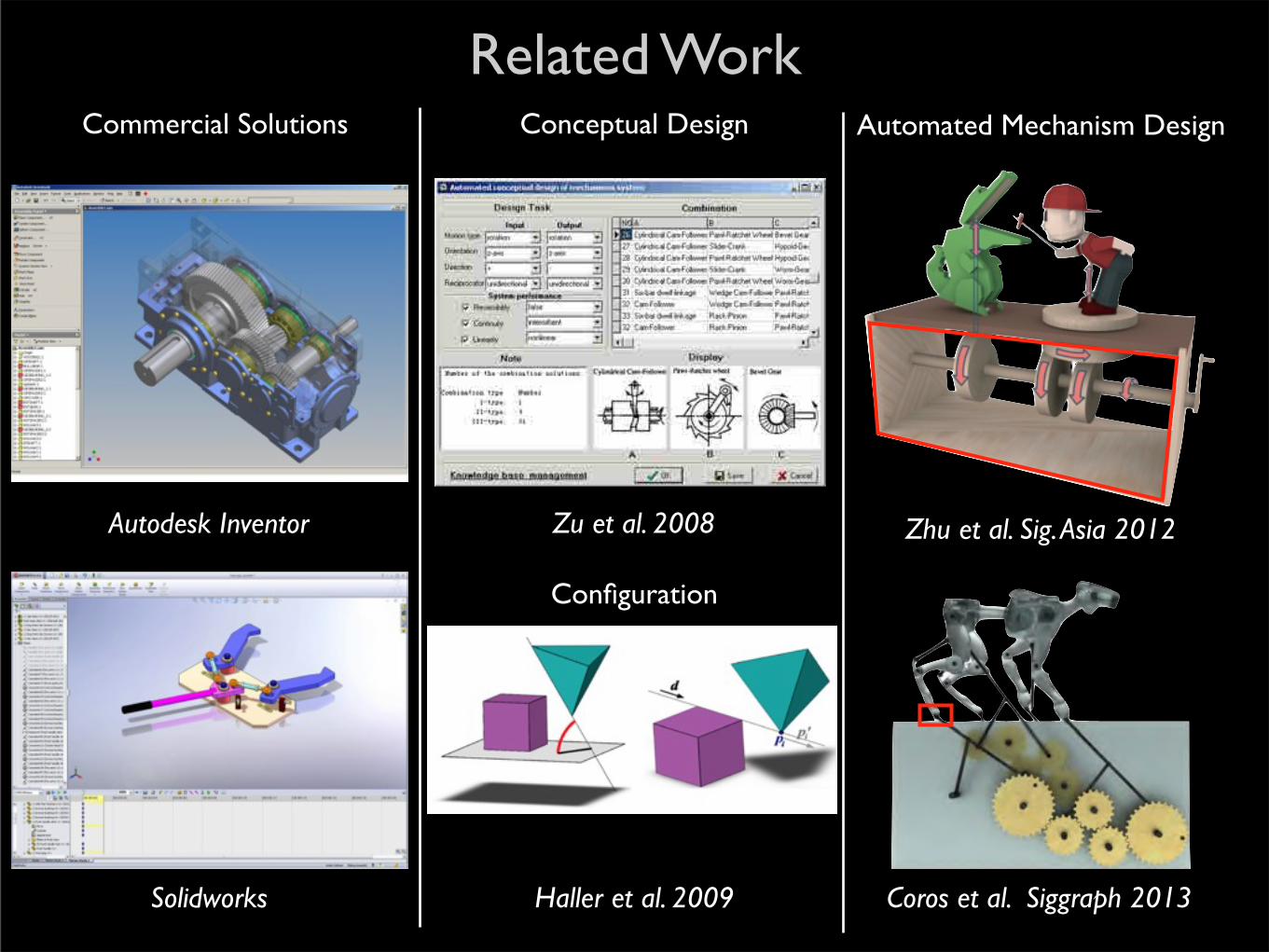
Related Work
Coros et al. Siggraph 2013
Commercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Zhu et al. Sig. Asia 2012
Automated Mechanism Design
Haller et al. 2009
Configuration
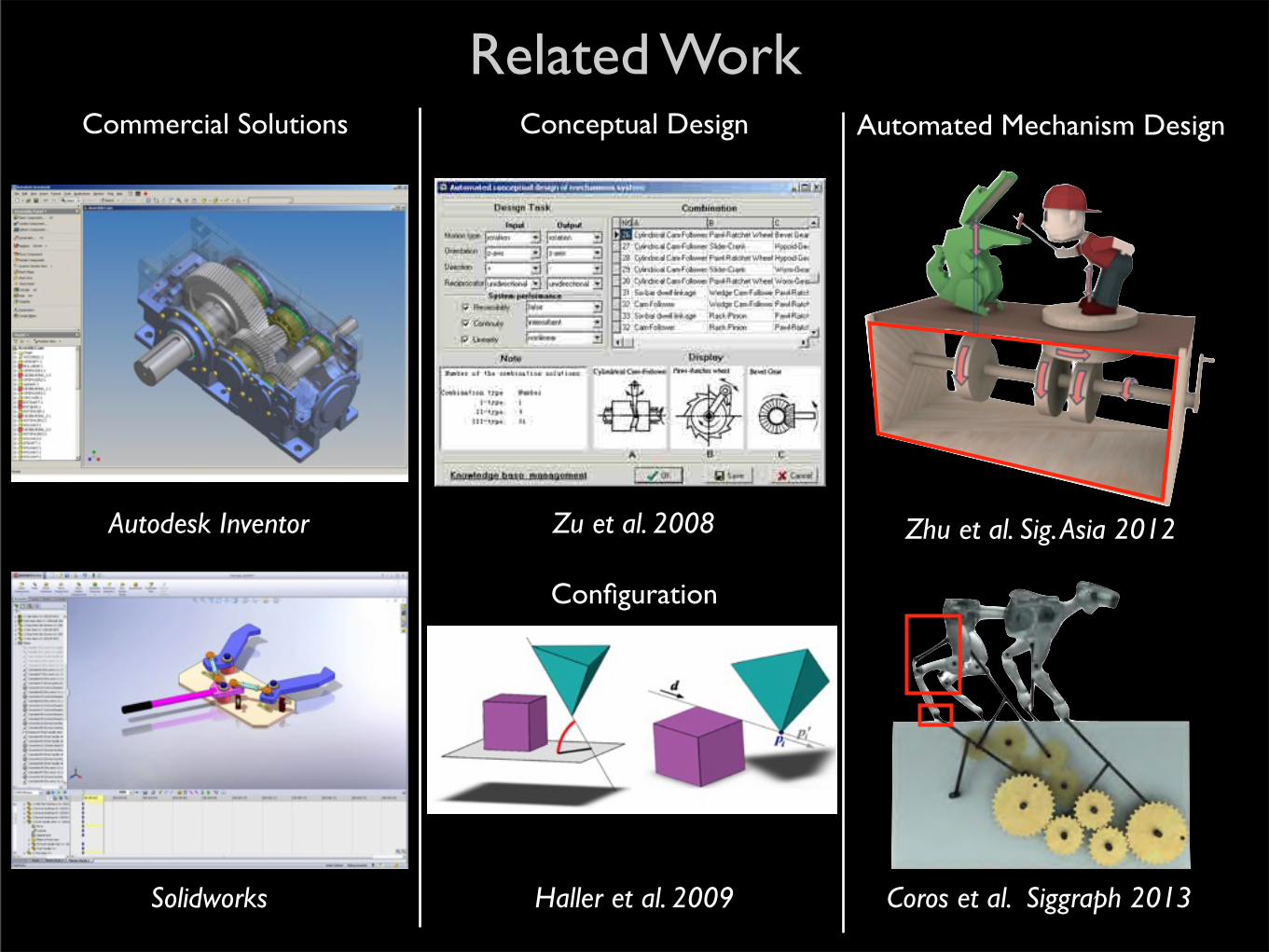
Related Work
Coros et al. Siggraph 2013
Commercial Solutions
Autodesk Inventor
Solidworks
Zu et al. 2008
Conceptual Design
Zhu et al. Sig. Asia 2012
Automated Mechanism Design
Haller et al. 2009
Configuration
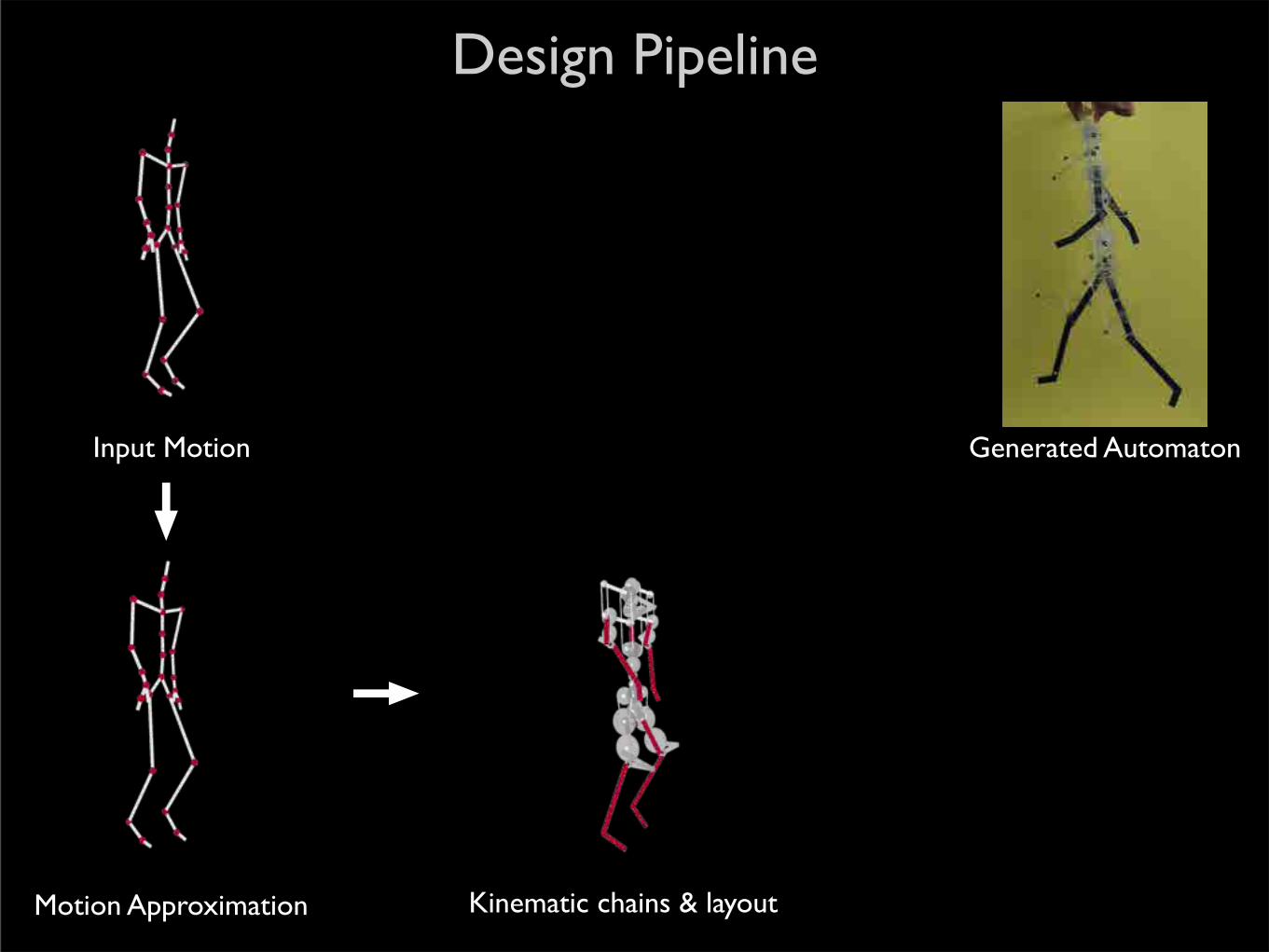
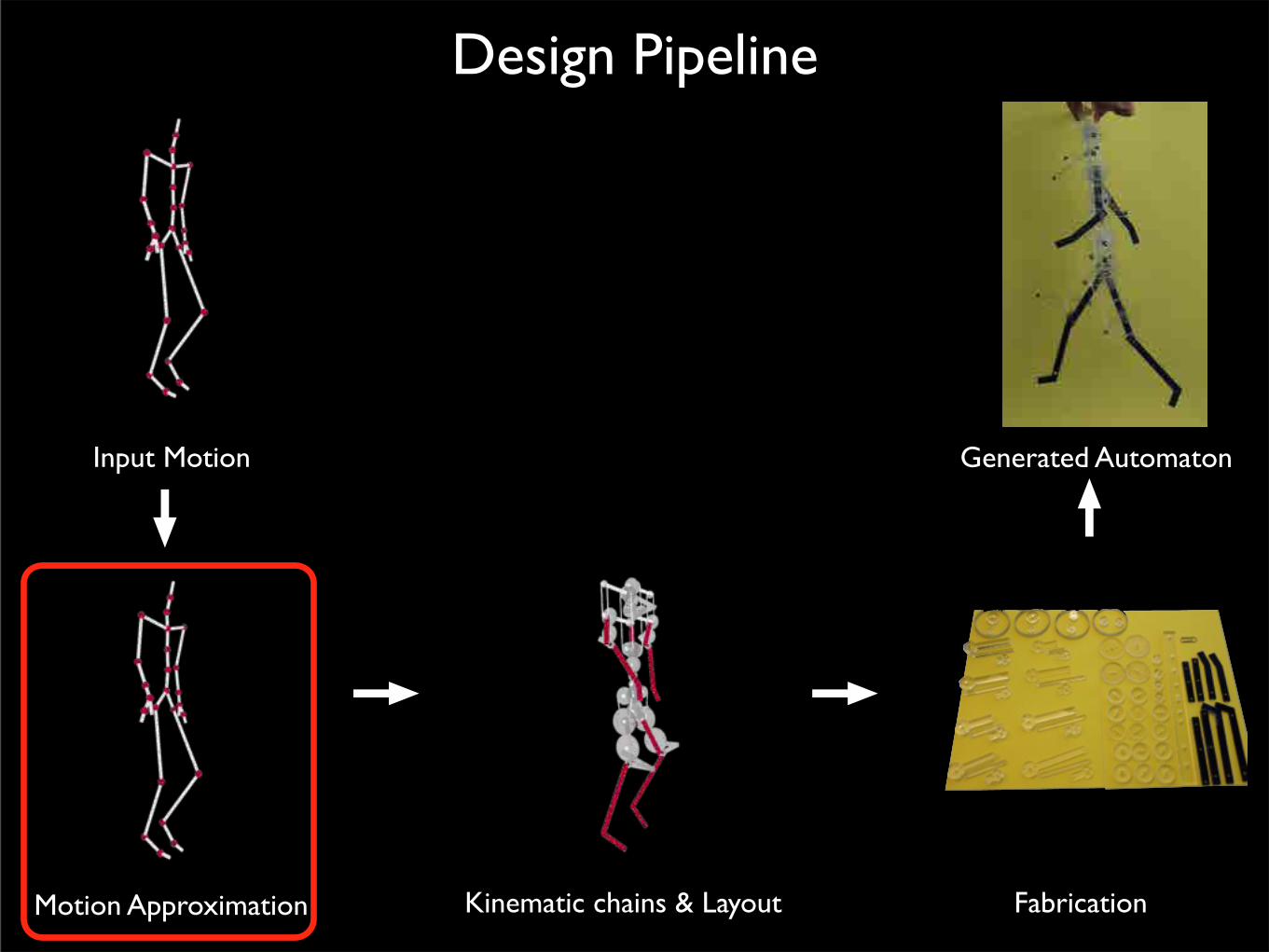
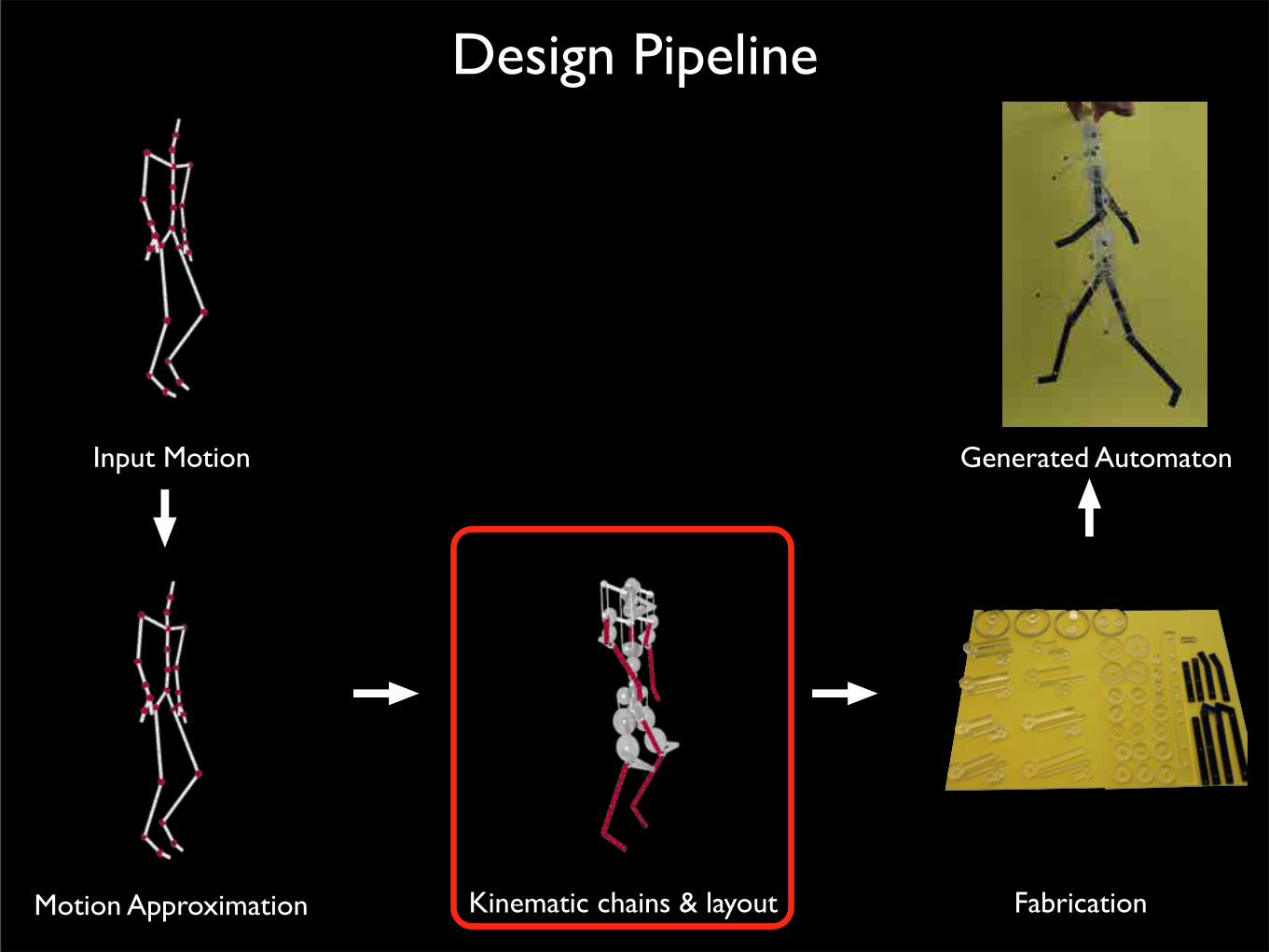
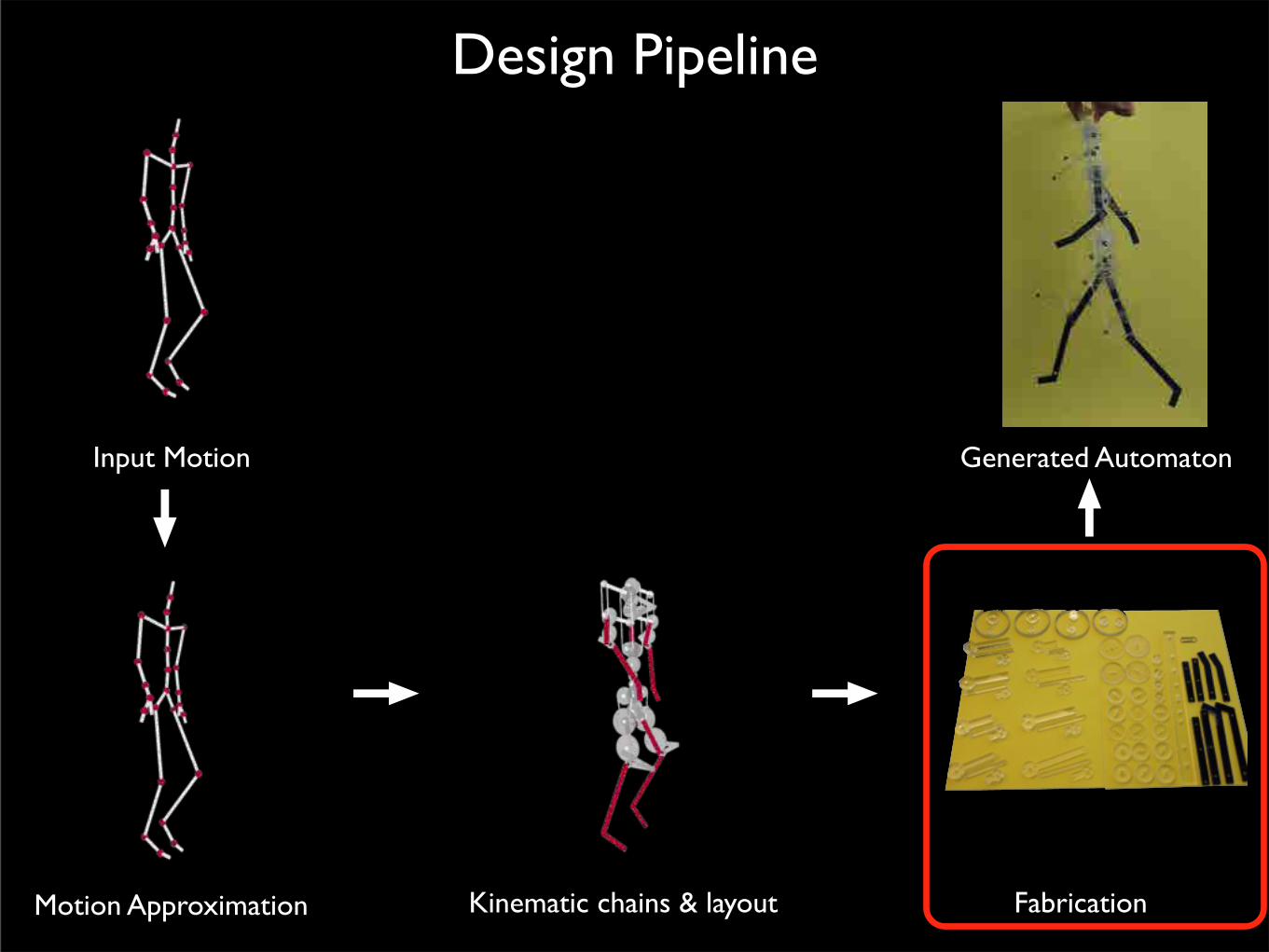
Design Pipeline
Input Motion Generated Automaton
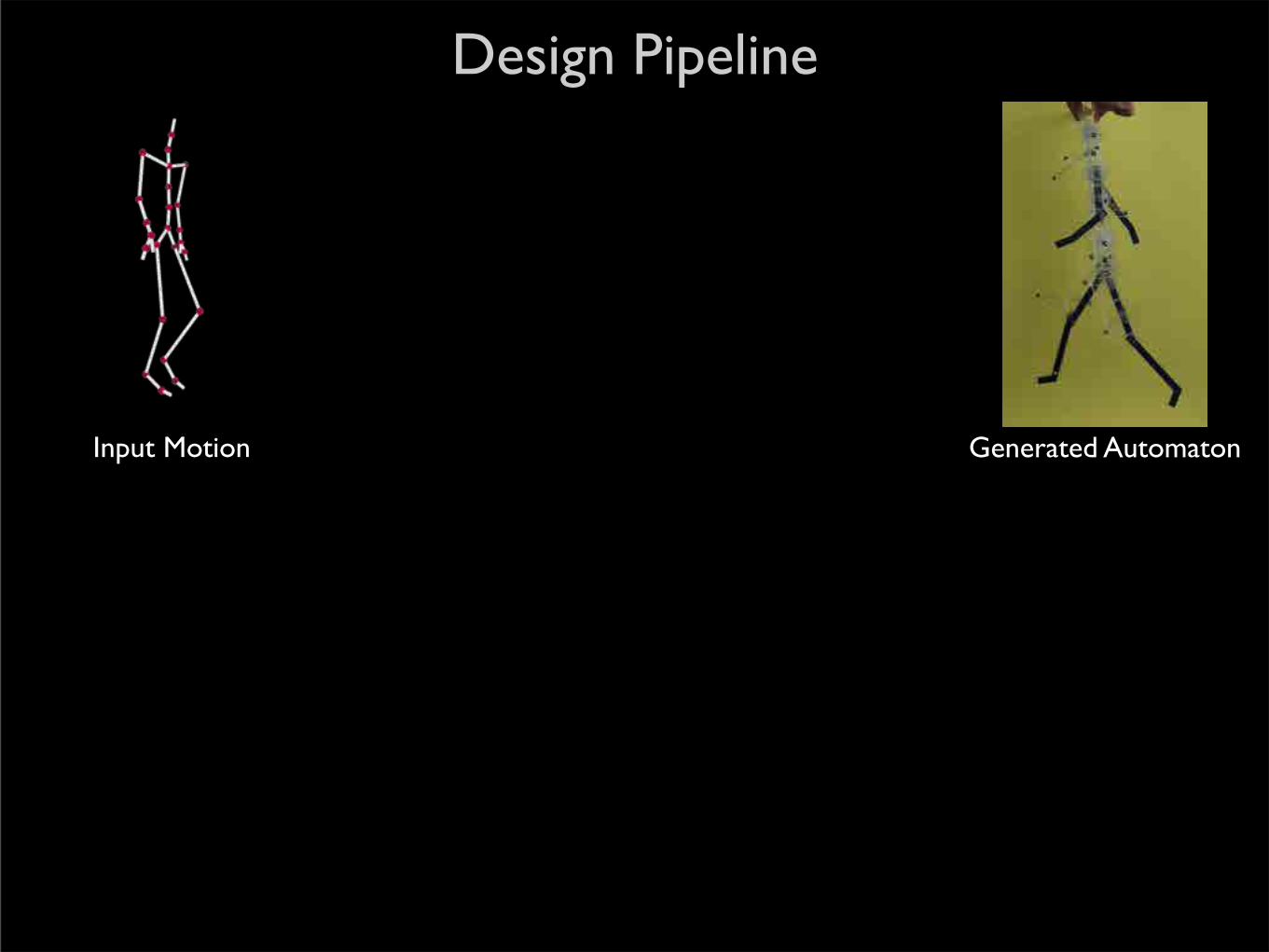
Design Pipeline
Input Motion Generated Automaton
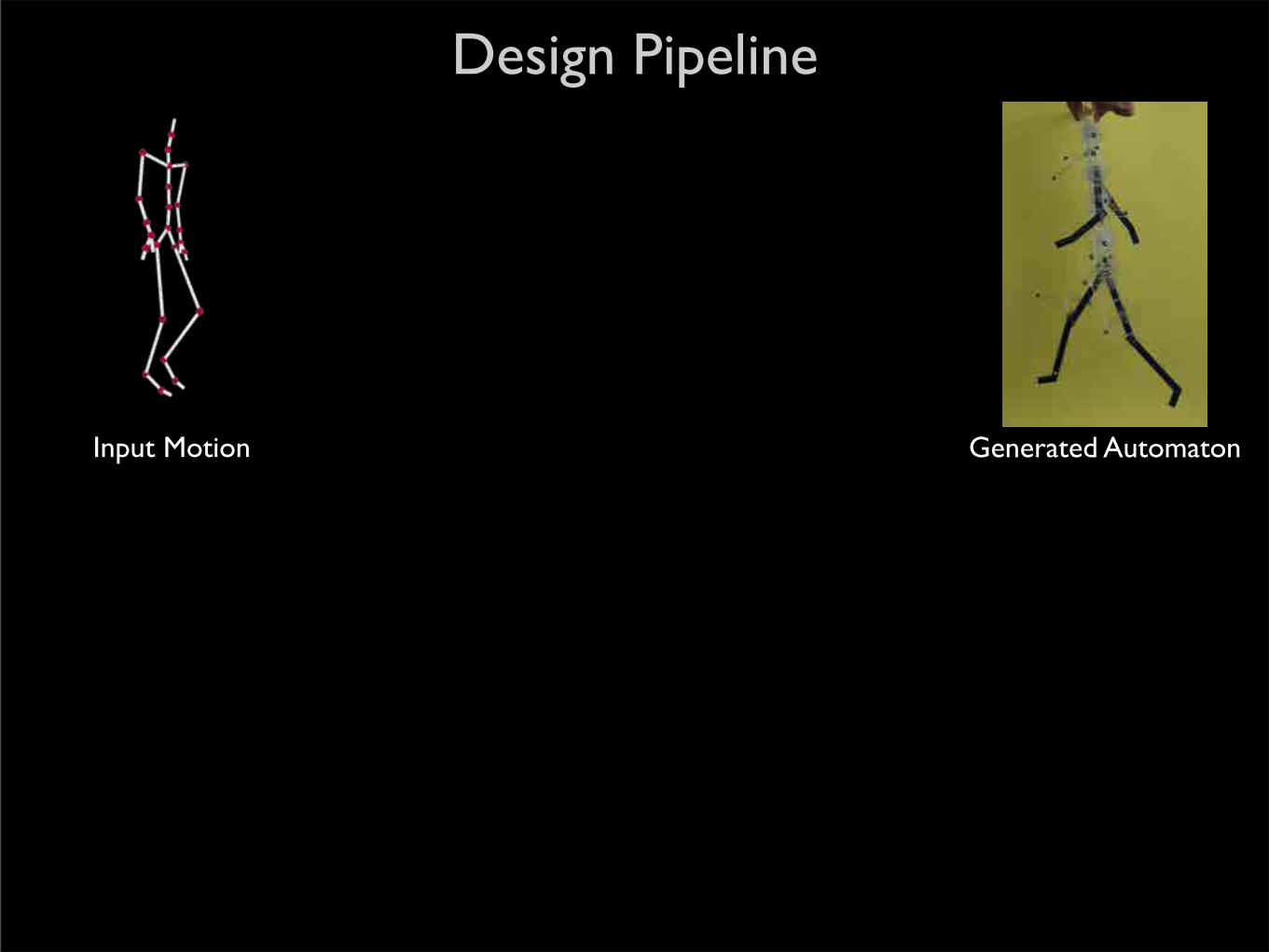
Design Pipeline
Input Motion Generated Automaton
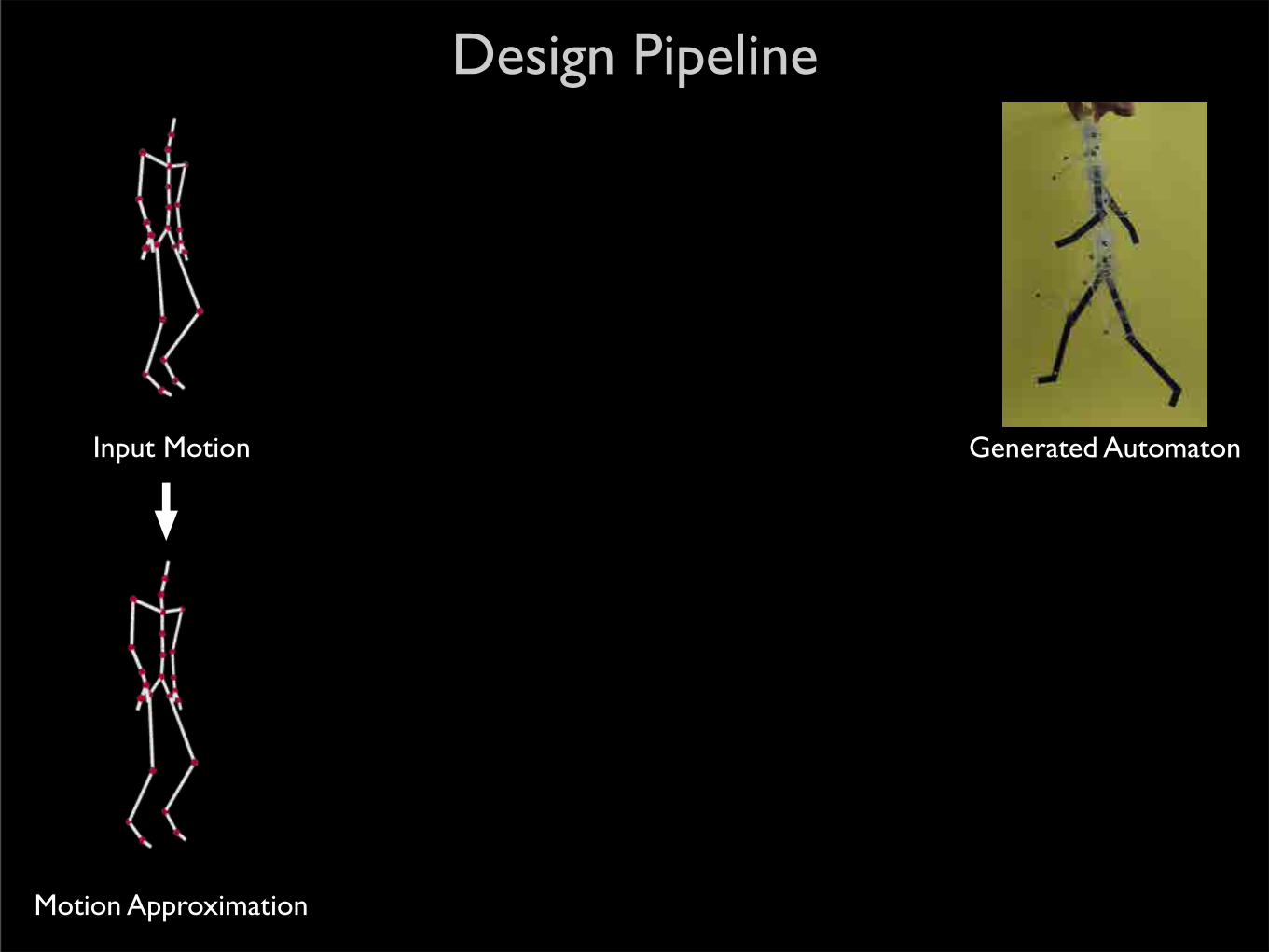
Design Pipeline
Input Motion Generated Automaton
Motion Approximation
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout
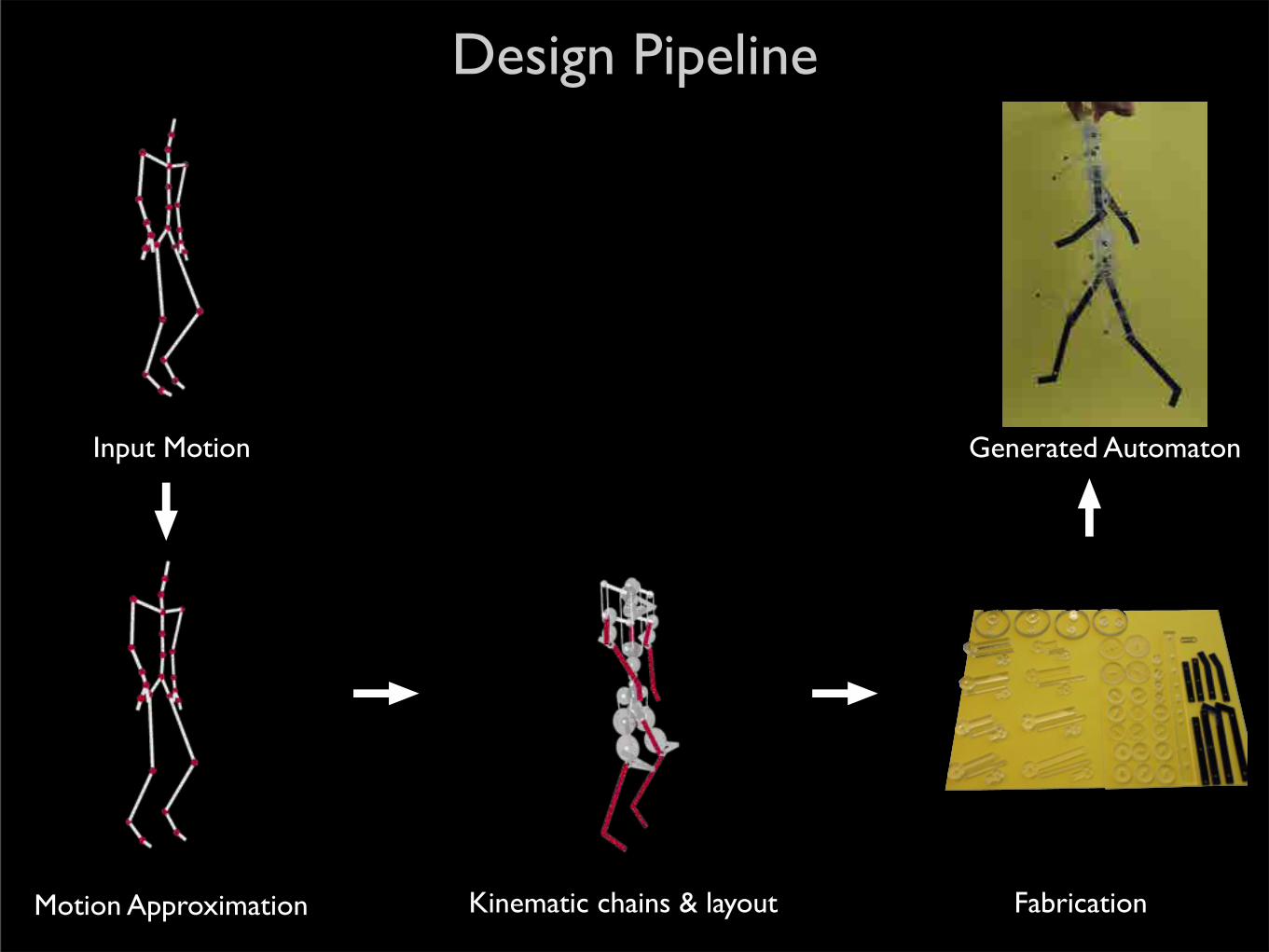
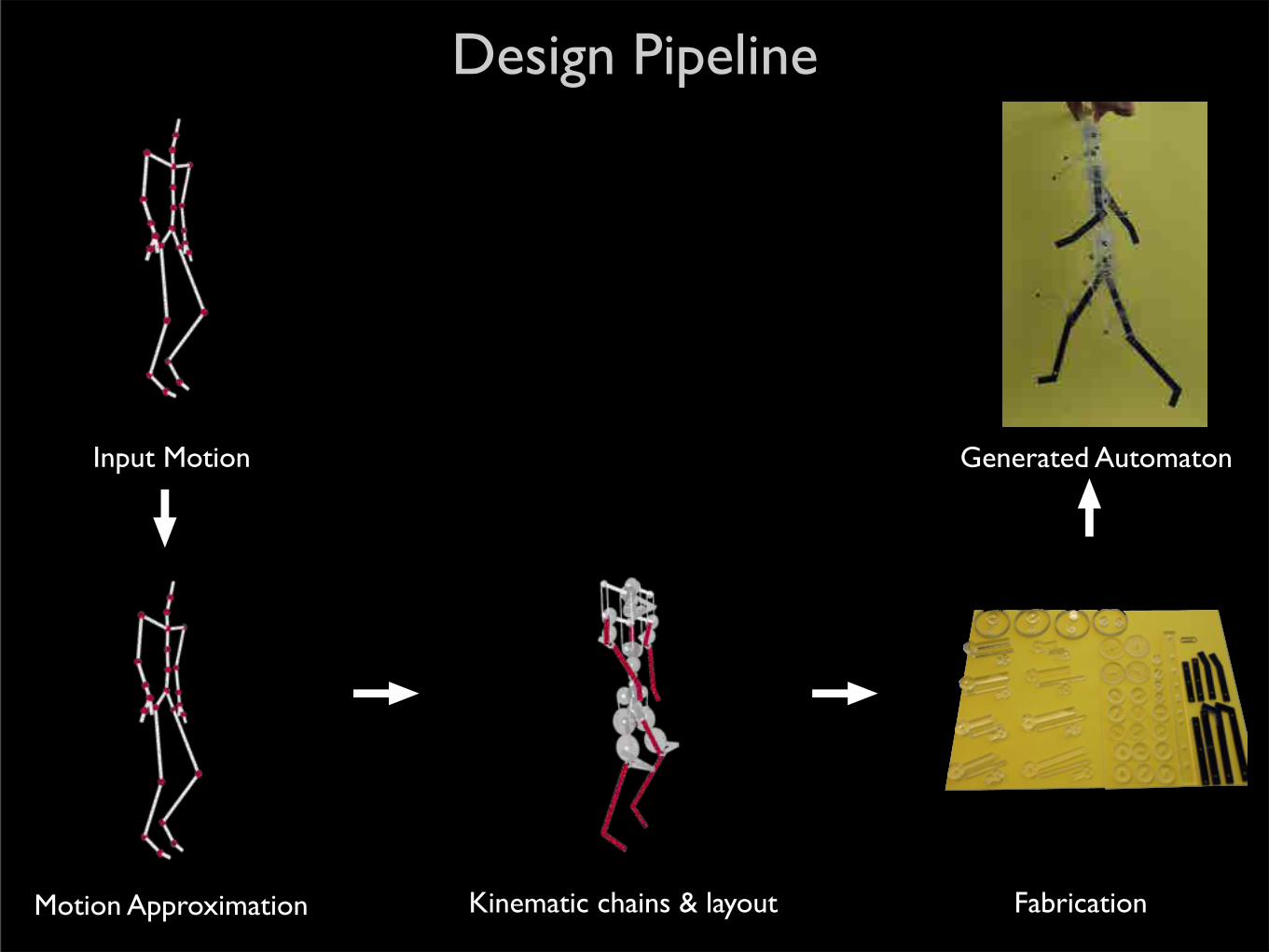
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
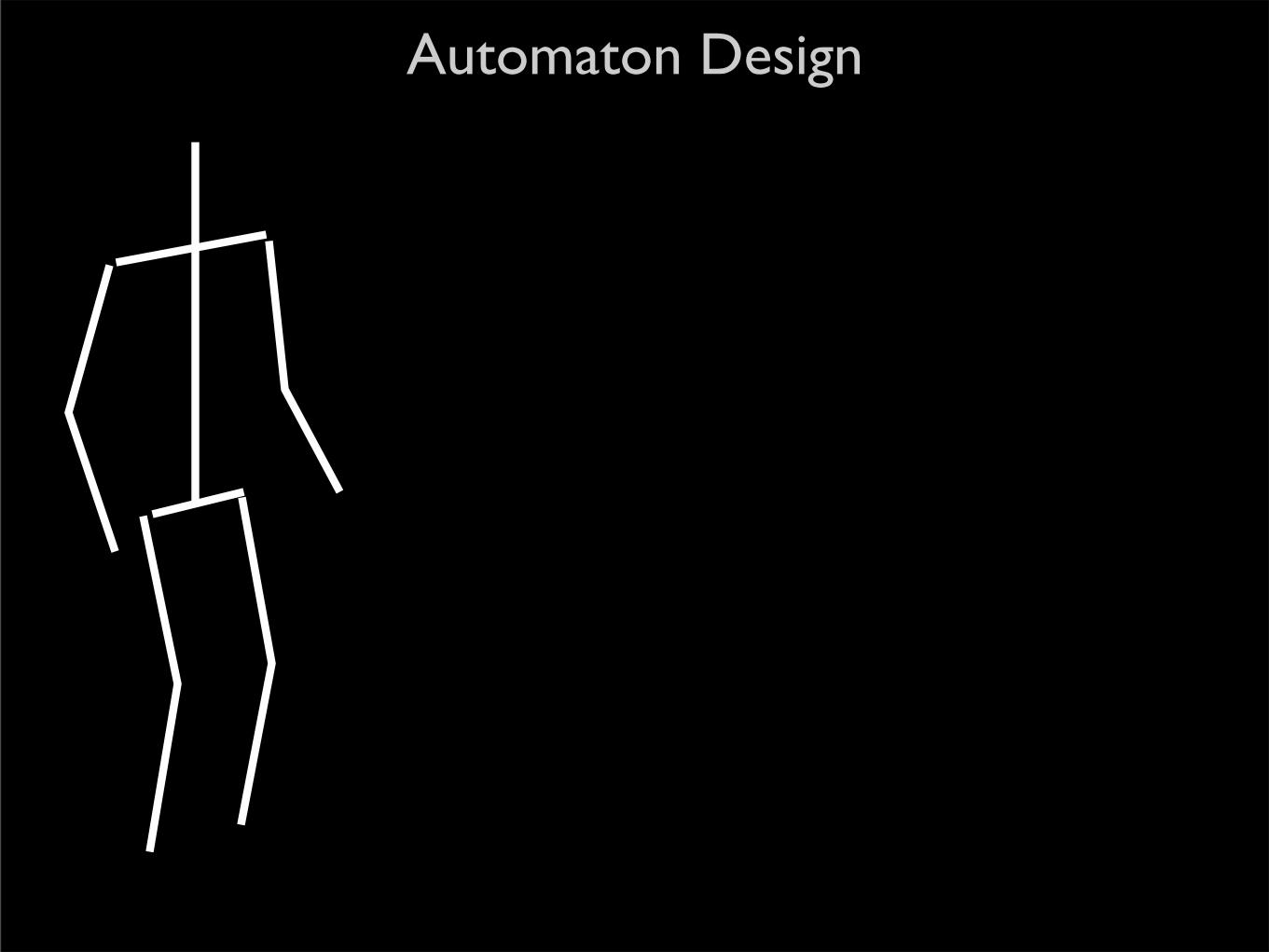
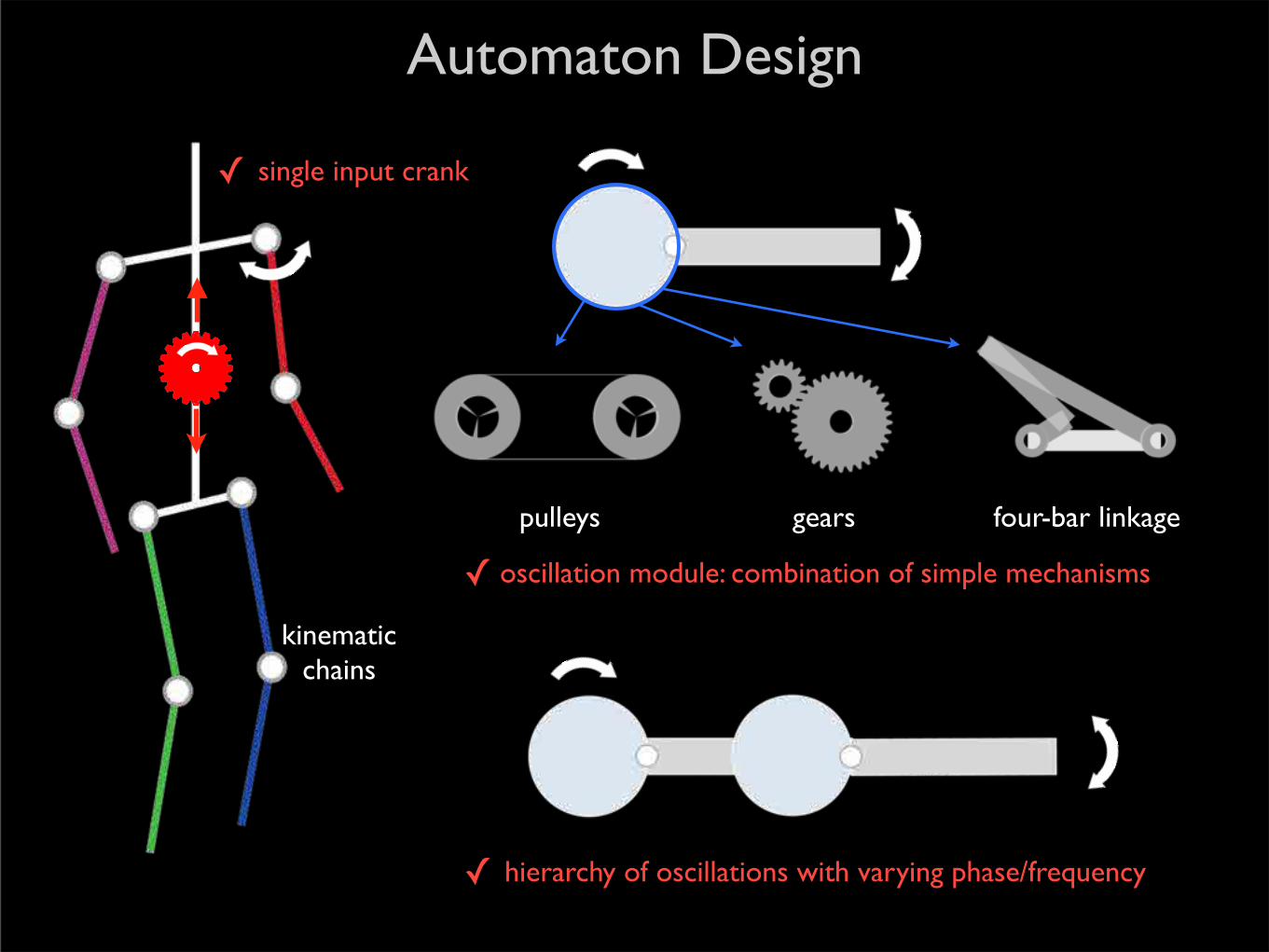
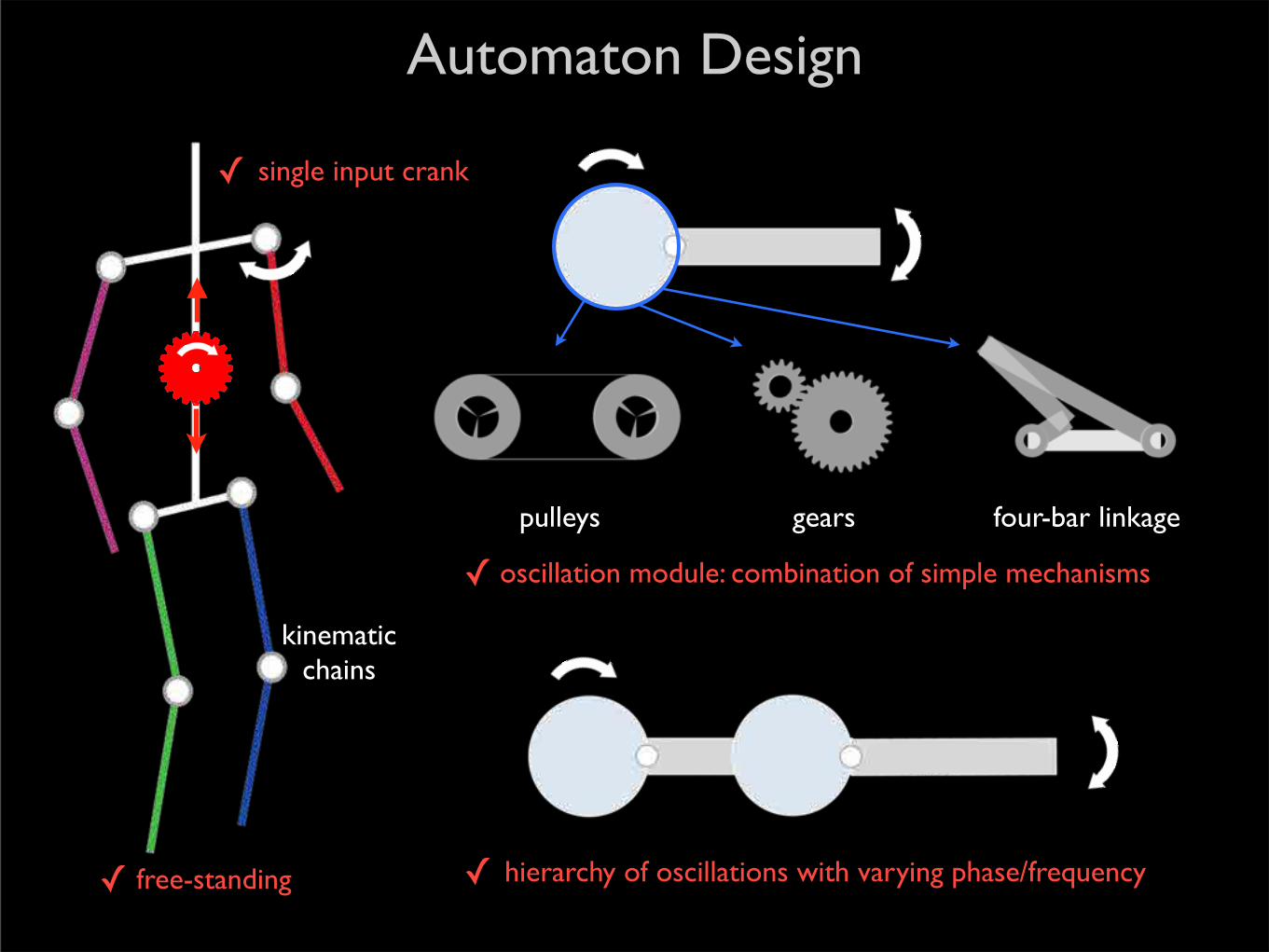
Automaton Design
Automaton Design
kinematicchains
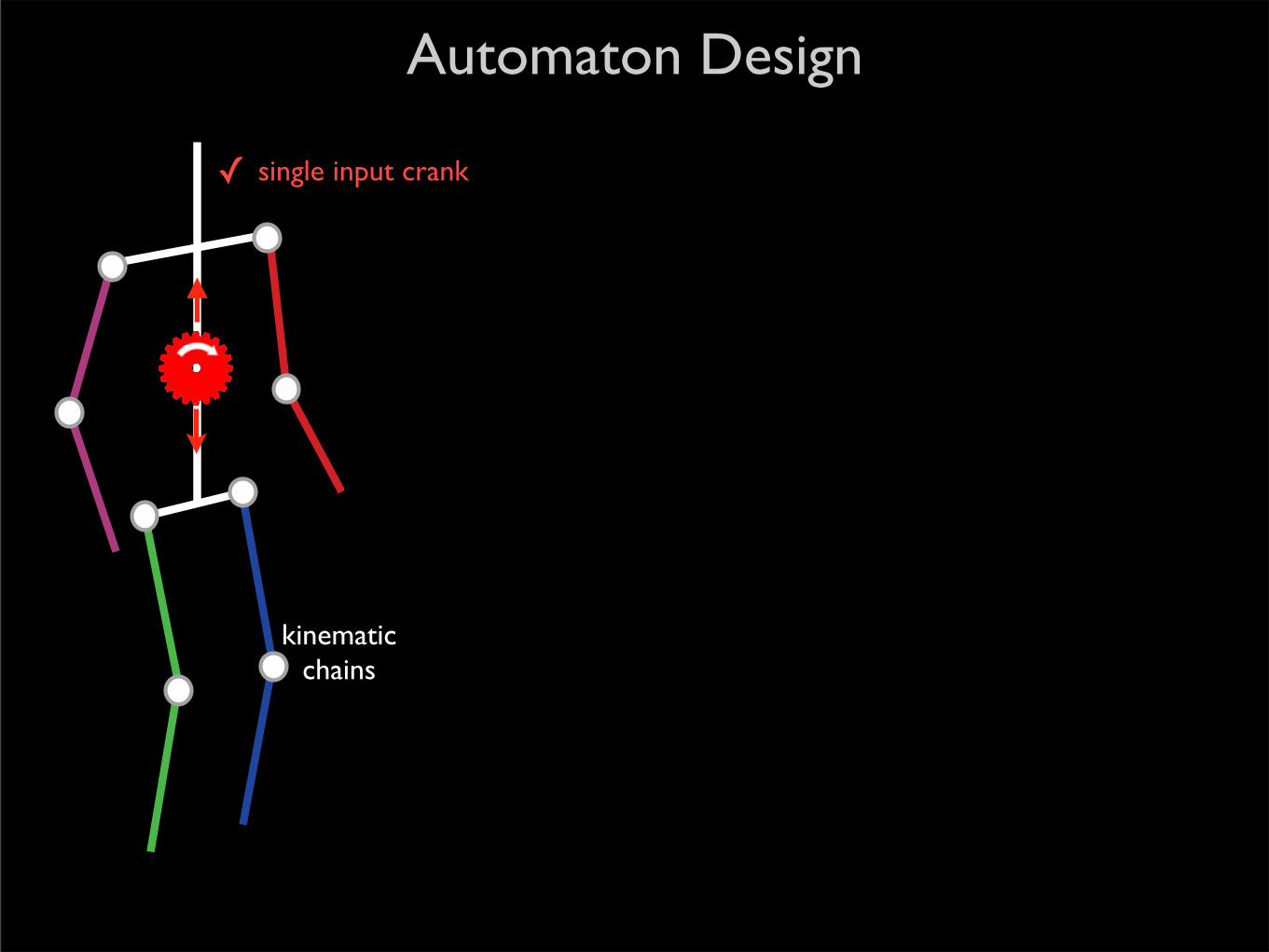
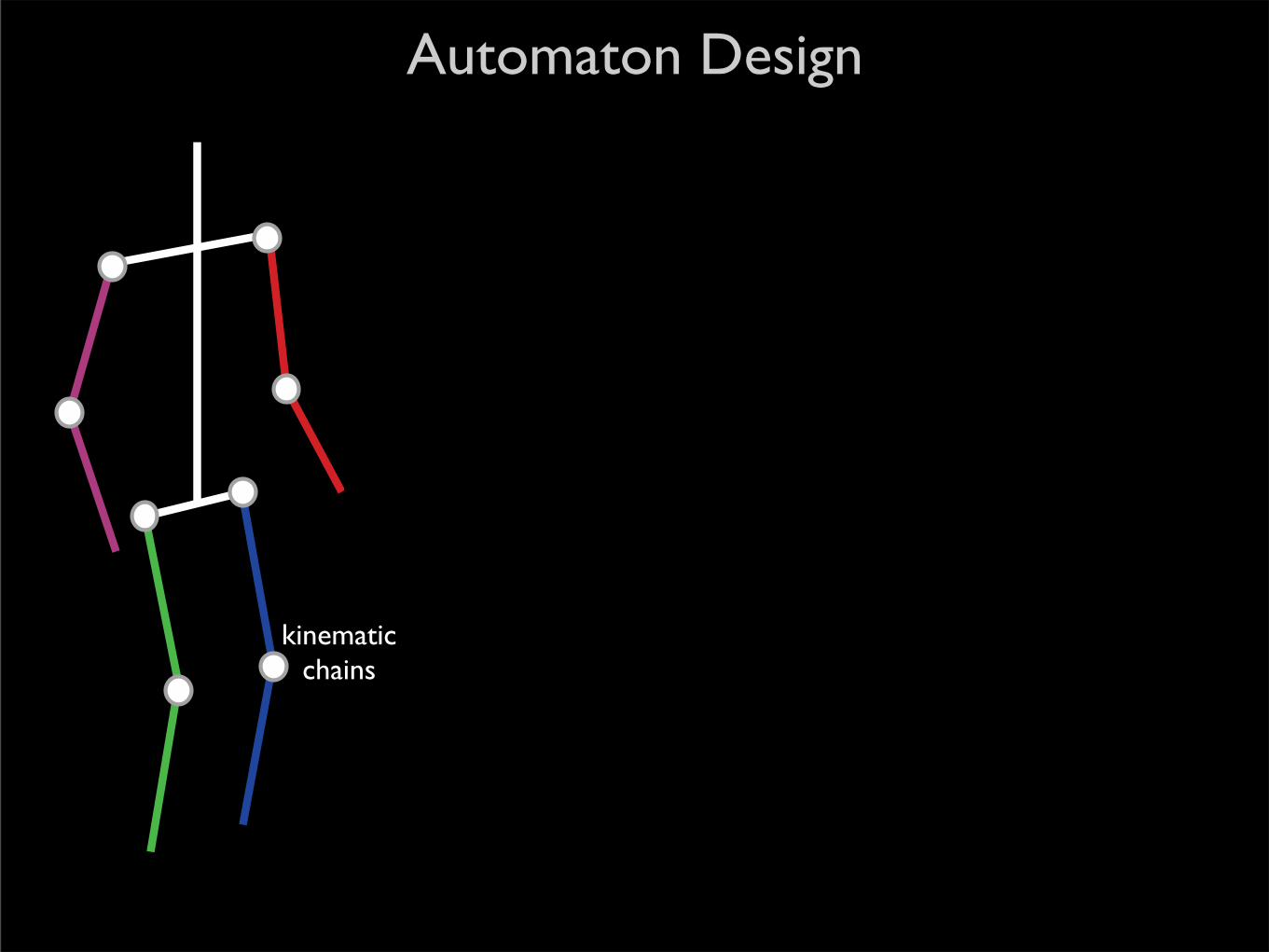
Automaton Design
✓ single input crank
kinematicchains

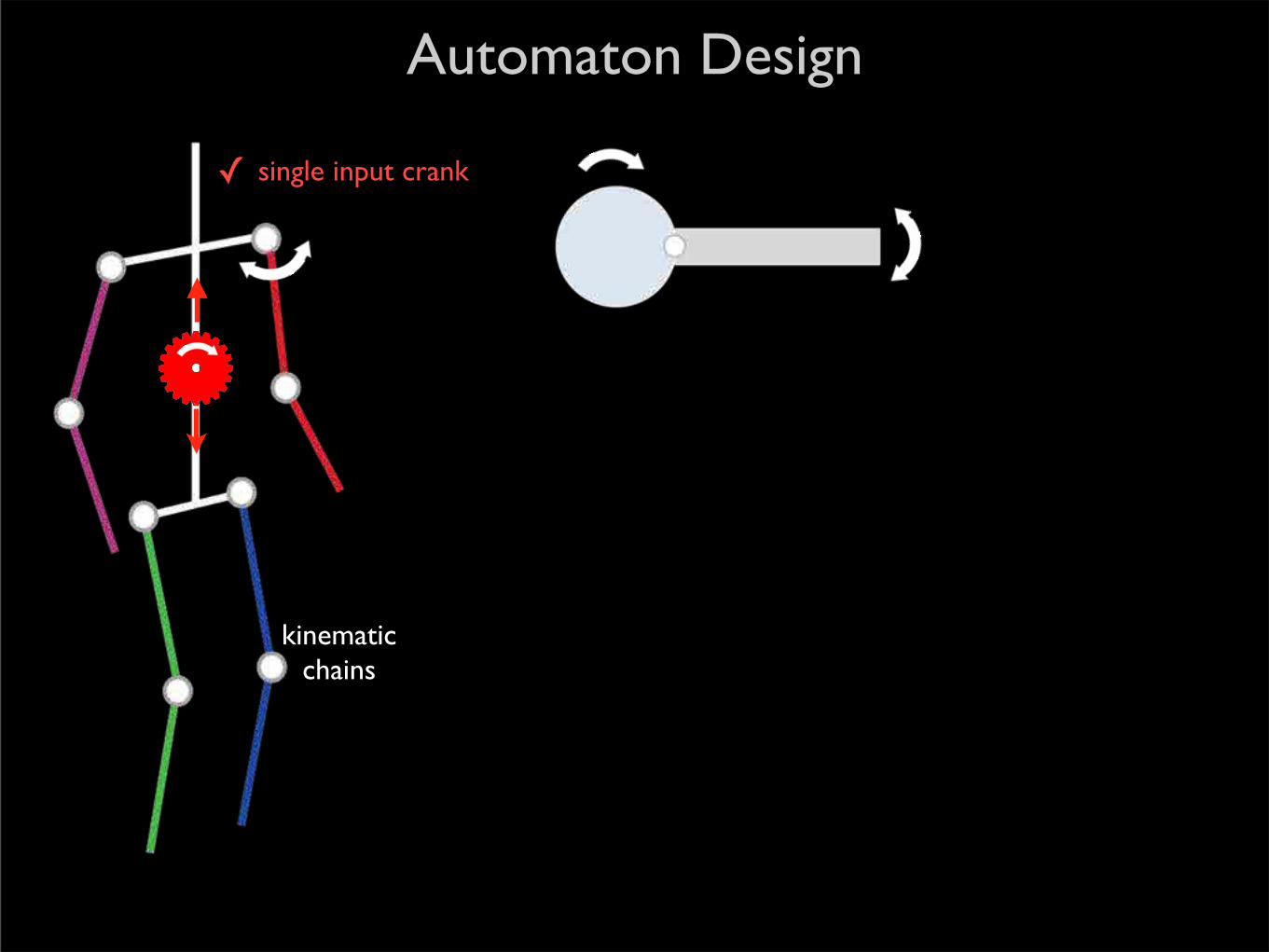
Automaton Design
✓ single input crank
kinematicchains
Automaton Design
✓ single input crank
kinematicchains
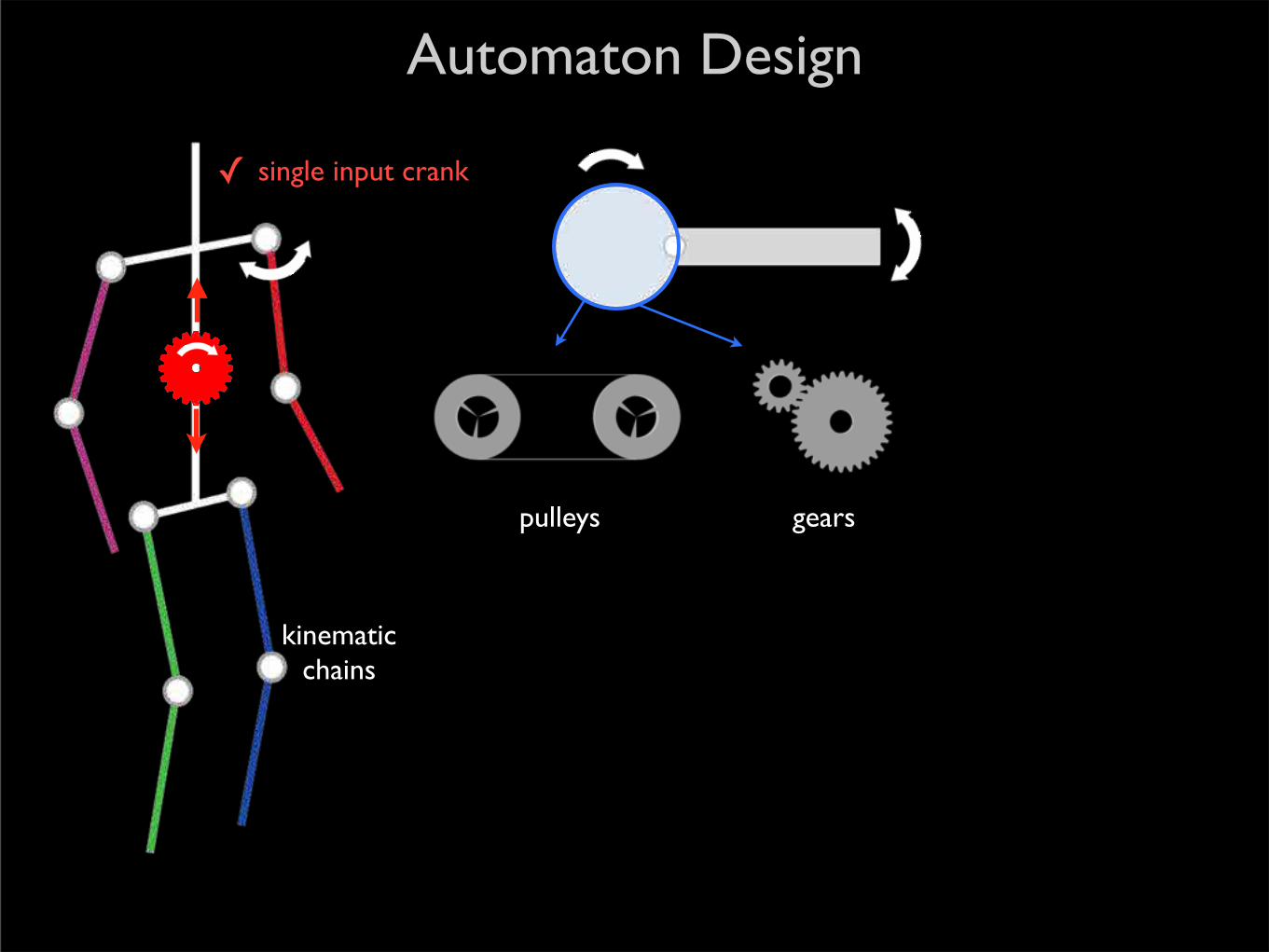
Automaton Design
✓ single input crank
pulleys gears
kinematicchains
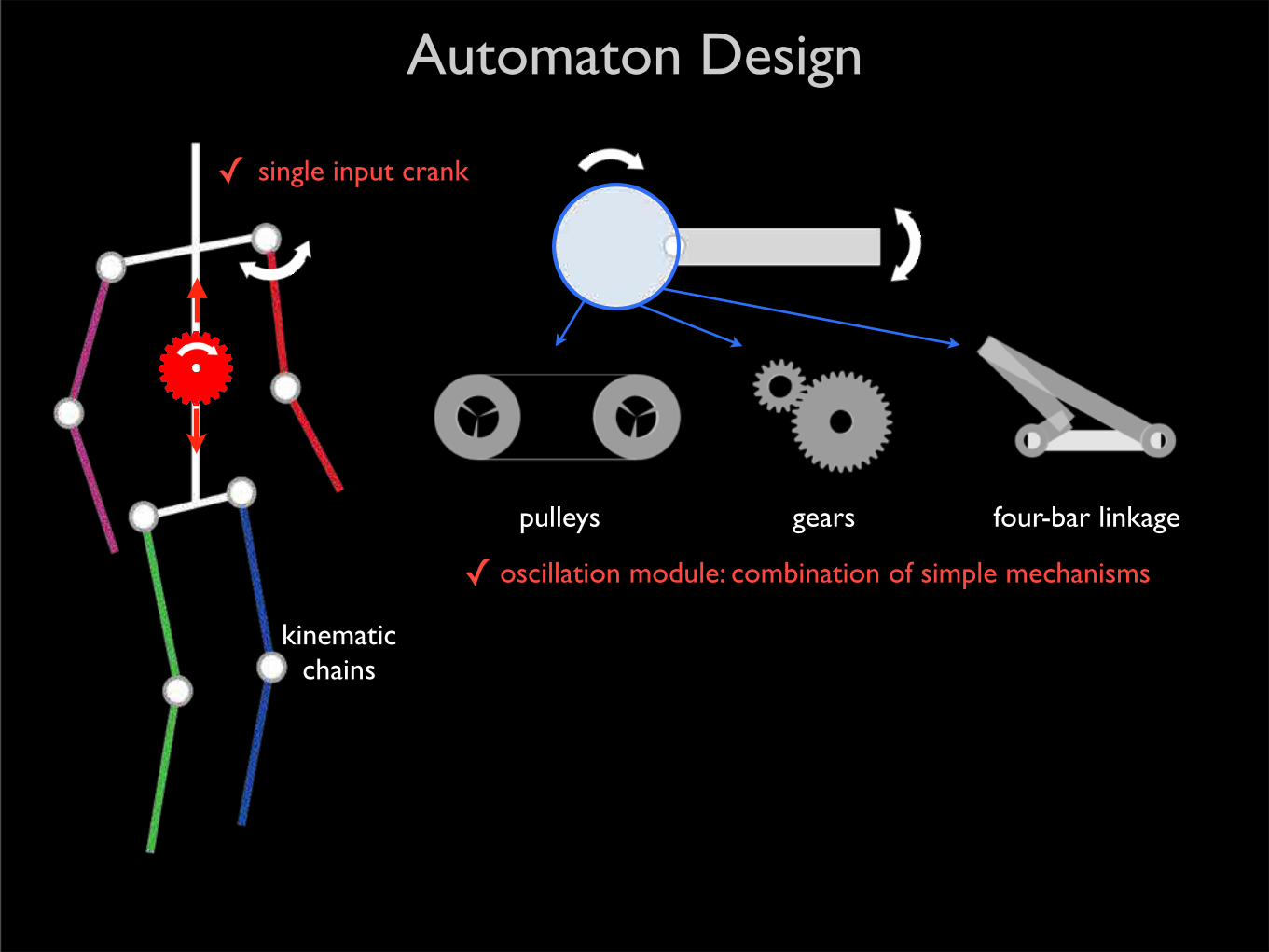
Automaton Design
✓ single input crank
pulleys gears four-bar linkage
✓ oscillation module: combination of simple mechanisms
kinematicchains
Automaton Design
✓ single input crank
✓ hierarchy of oscillations with varying phase/frequency
pulleys gears four-bar linkage
✓ oscillation module: combination of simple mechanisms
kinematicchains
Automaton Design
✓ single input crank
✓ hierarchy of oscillations with varying phase/frequency
pulleys gears four-bar linkage
✓ oscillation module: combination of simple mechanisms
kinematicchains
✓ free-standing
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & Layout Fabrication
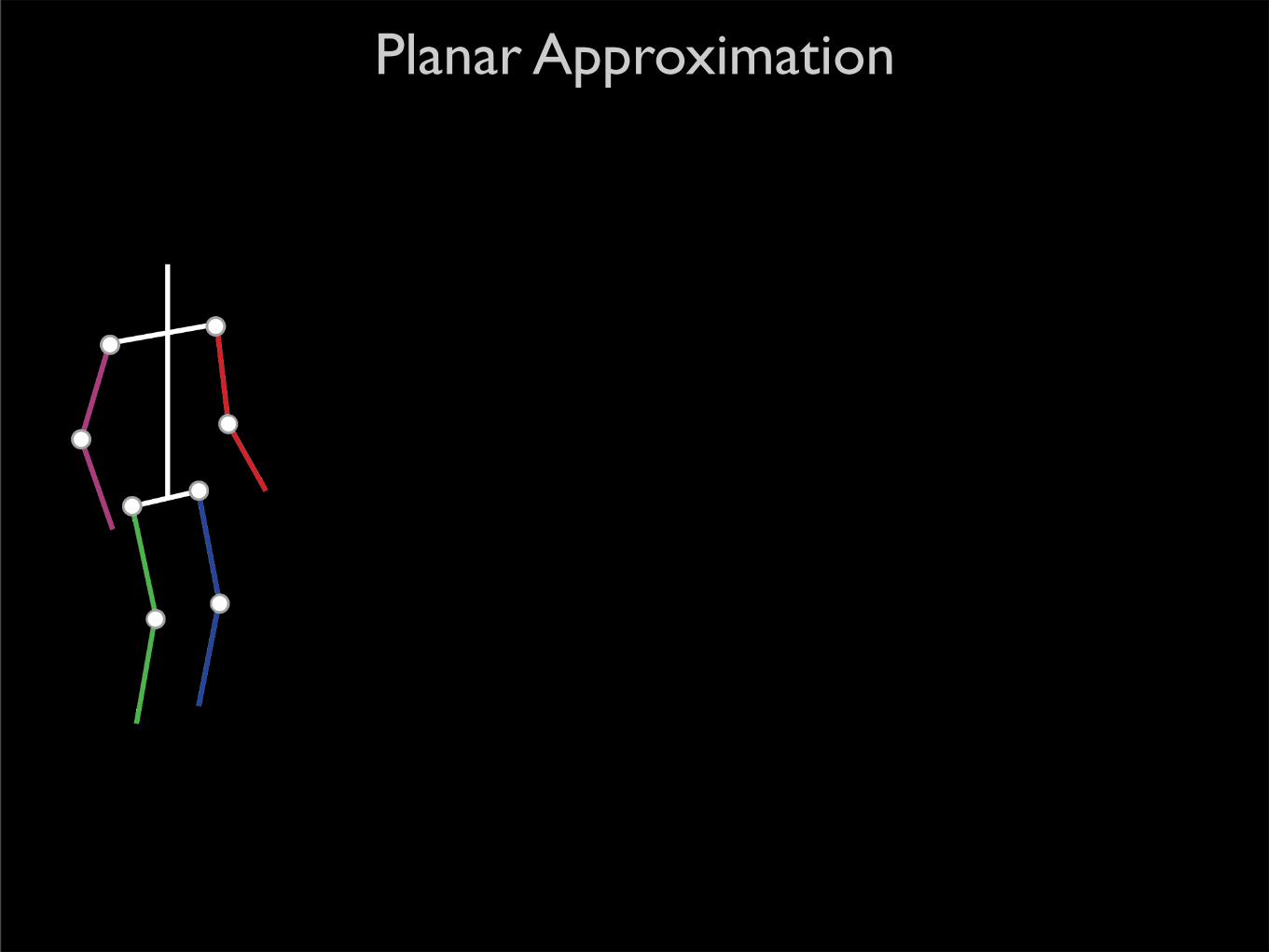
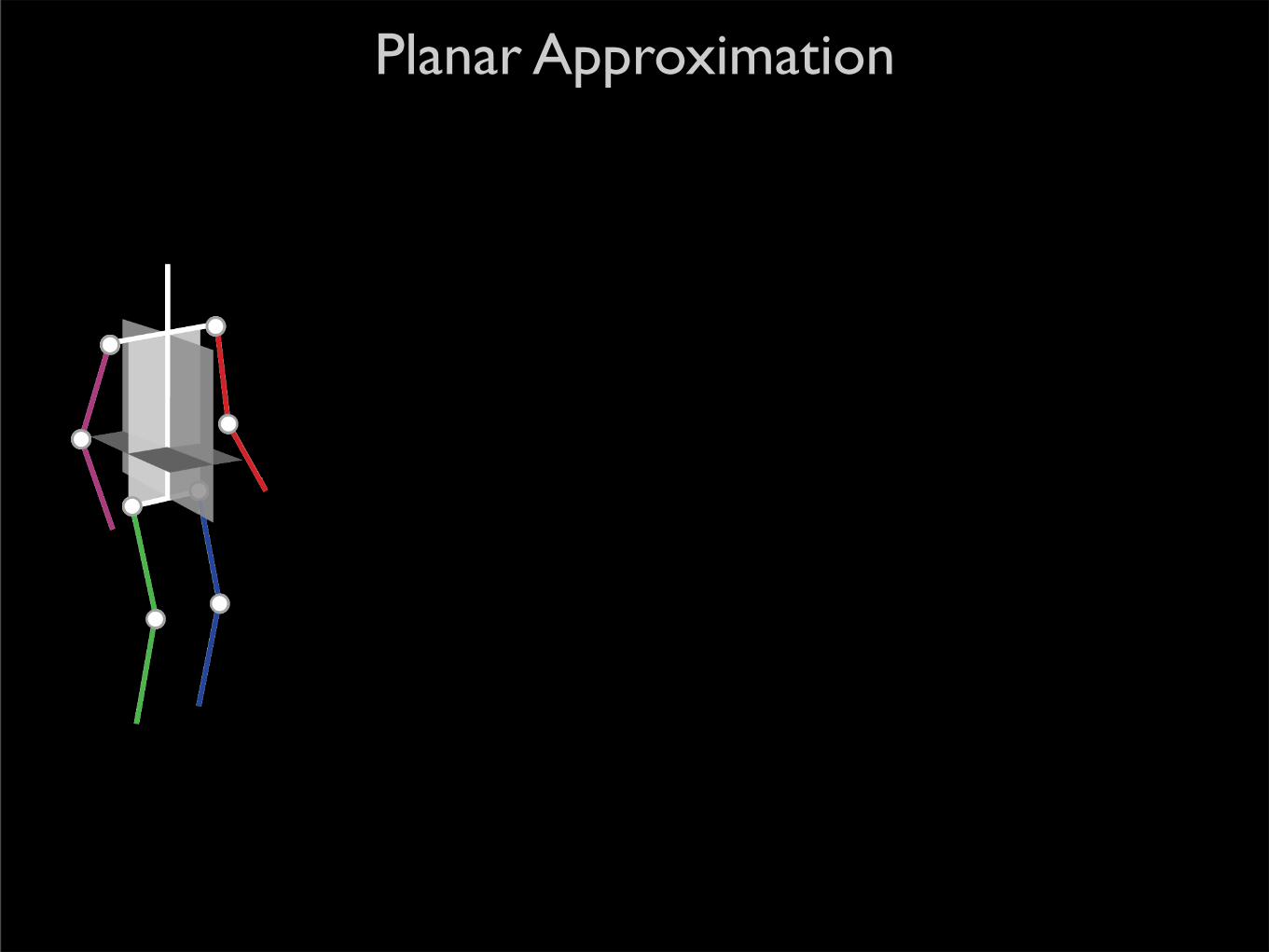
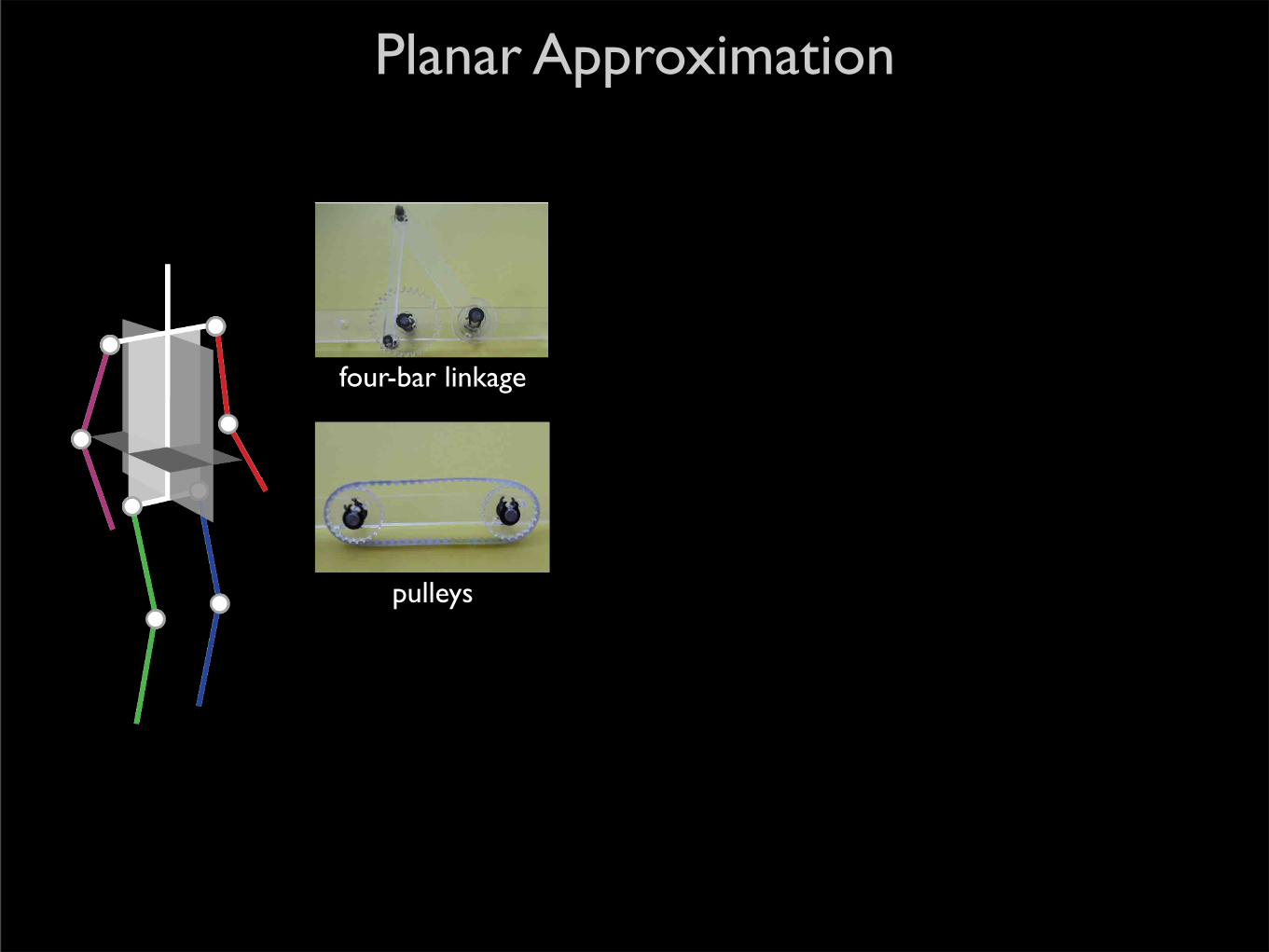
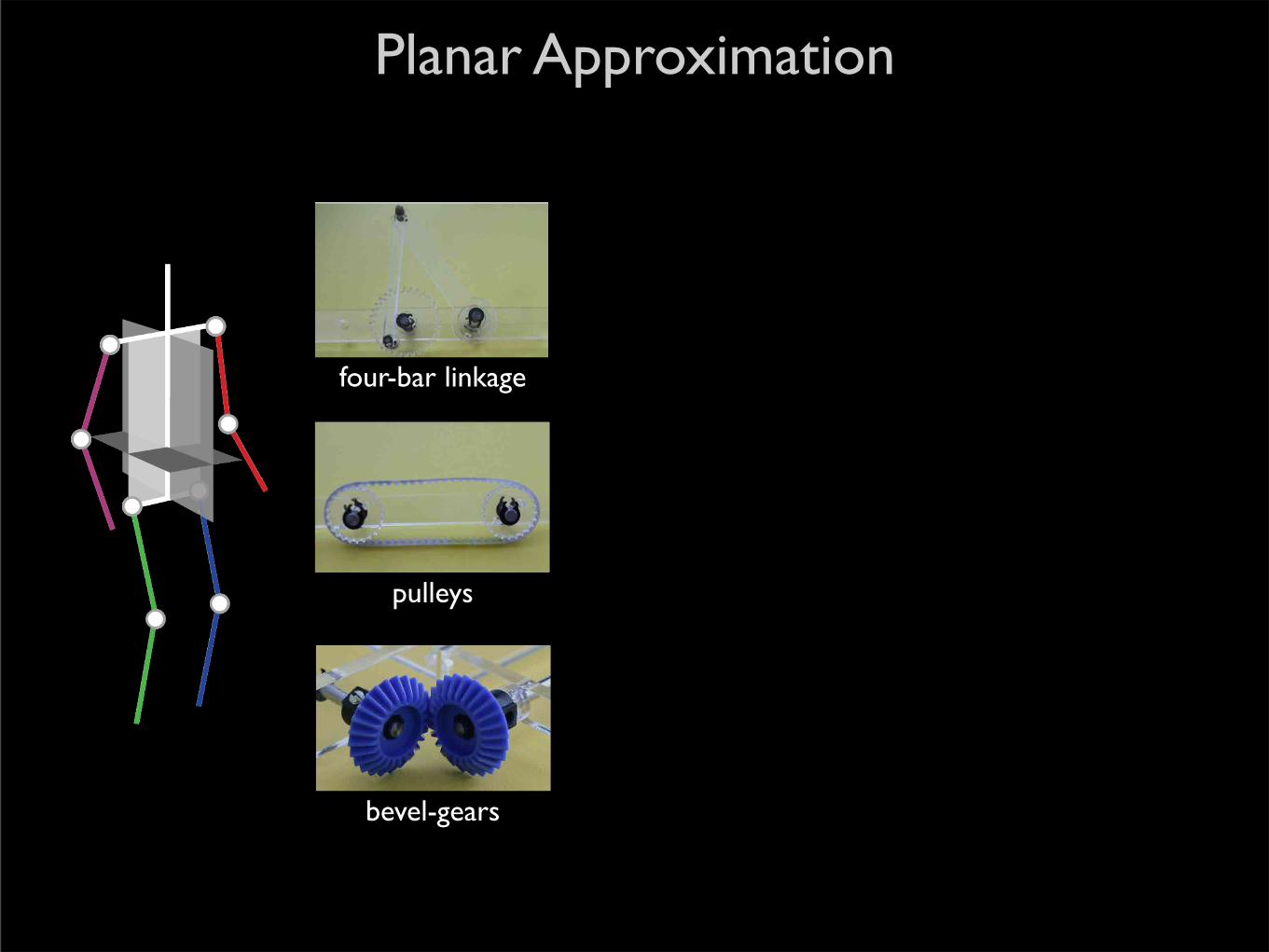
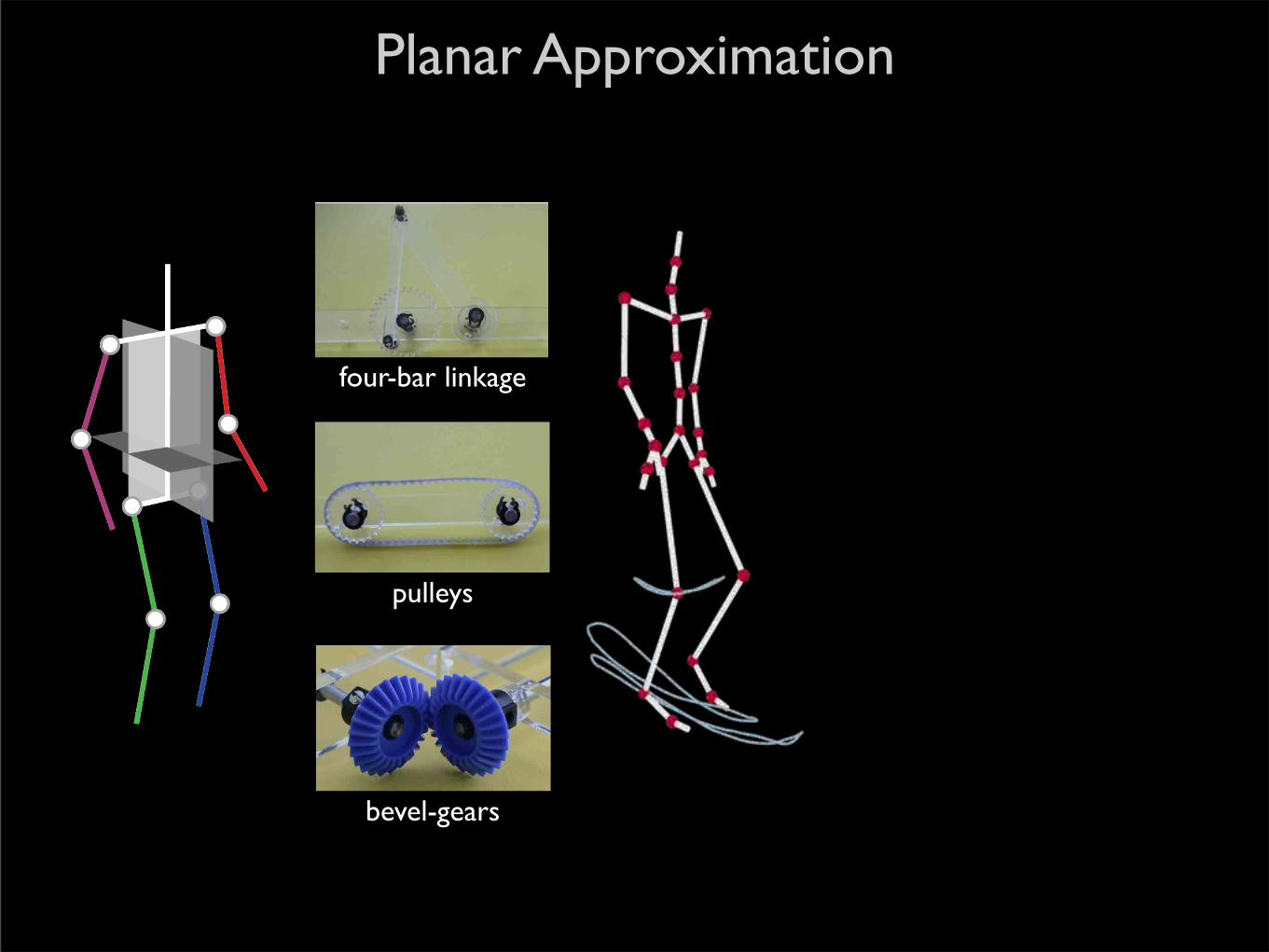
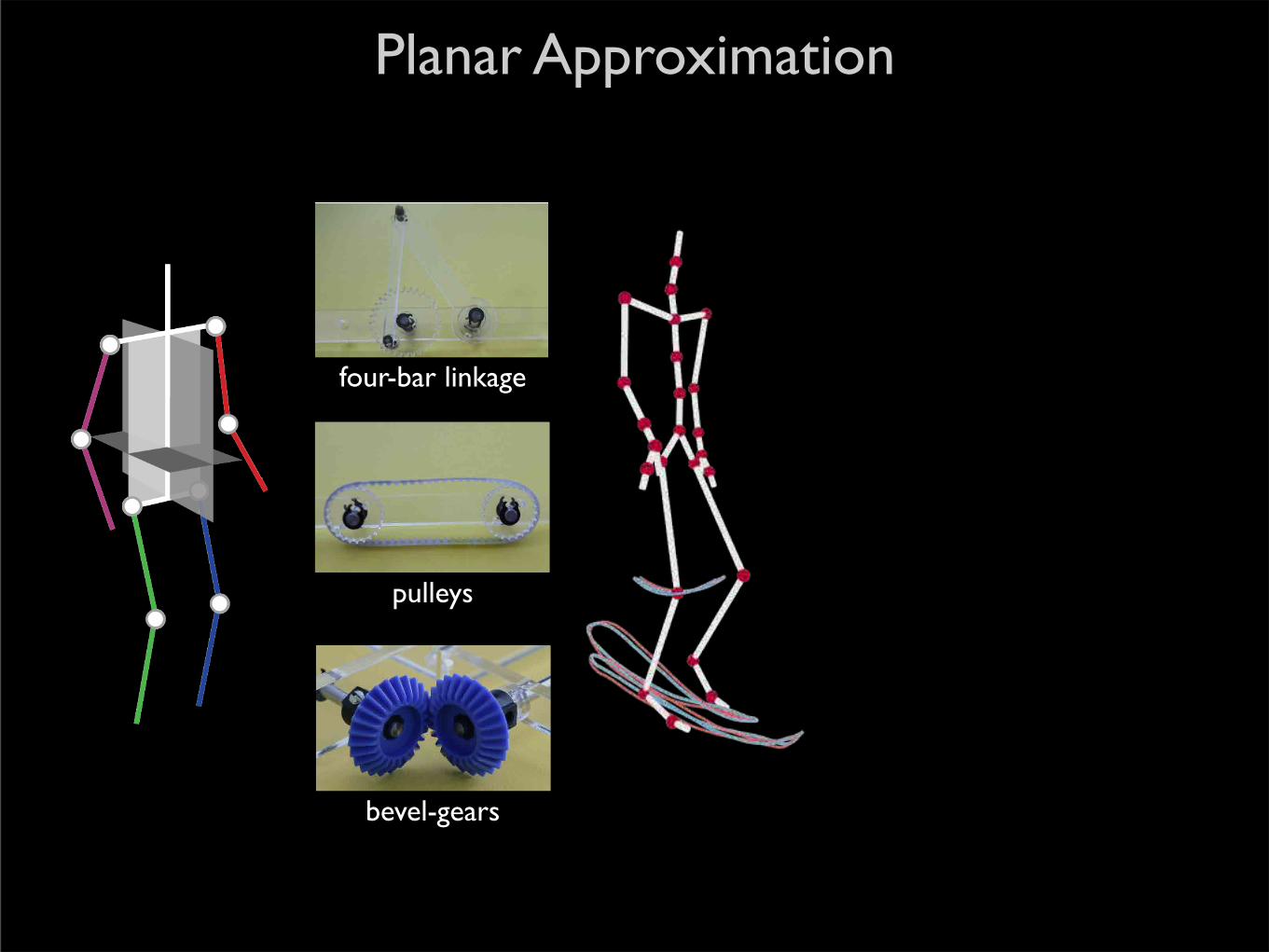
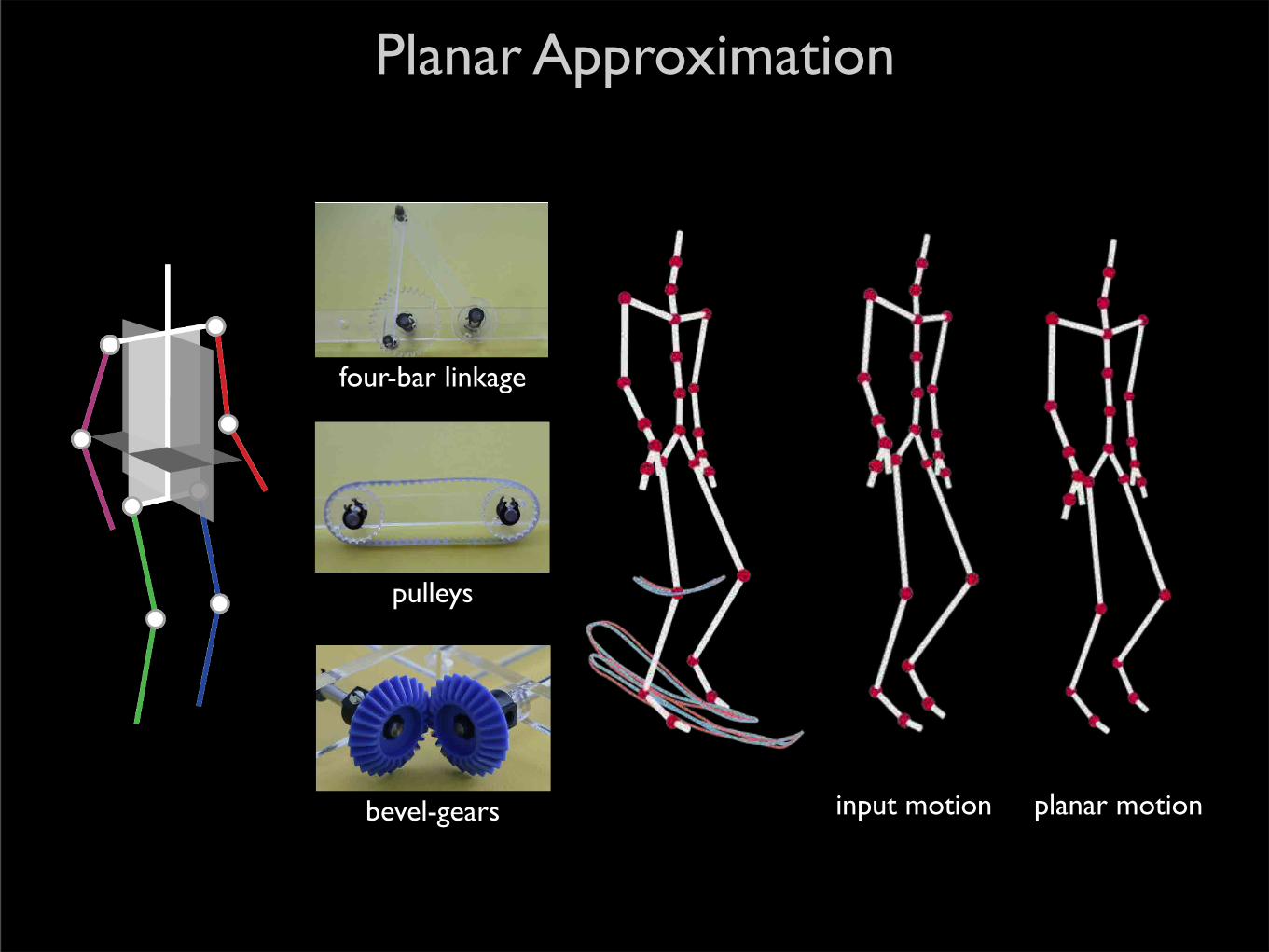
Planar Approximation
Planar Approximation
Planar Approximation
bevel gearsoscillation modulepulleysfour-bar linkage
bevel gearsoscillation modulepulleysfour-bar linkage
four-bar linkage
pulleys
Planar Approximation
bevel gearsoscillation modulepulleysfour-bar linkage
bevel gearsoscillation modulepulleysfour-bar linkage
four-bar linkage
pulleys
bevel gearsoscillation modulepulleysfour-bar linkage bevel-gears
Planar Approximation
bevel gearsoscillation modulepulleysfour-bar linkage
bevel gearsoscillation modulepulleysfour-bar linkage
four-bar linkage
pulleys
bevel gearsoscillation modulepulleysfour-bar linkage bevel-gears
Planar Approximation
bevel gearsoscillation modulepulleysfour-bar linkage
bevel gearsoscillation modulepulleysfour-bar linkage
four-bar linkage
pulleys
bevel gearsoscillation modulepulleysfour-bar linkage bevel-gears
Planar Approximation
input motion planar motion
bevel gearsoscillation modulepulleysfour-bar linkage
bevel gearsoscillation modulepulleysfour-bar linkage
four-bar linkage
pulleys
bevel gearsoscillation modulepulleysfour-bar linkage bevel-gears
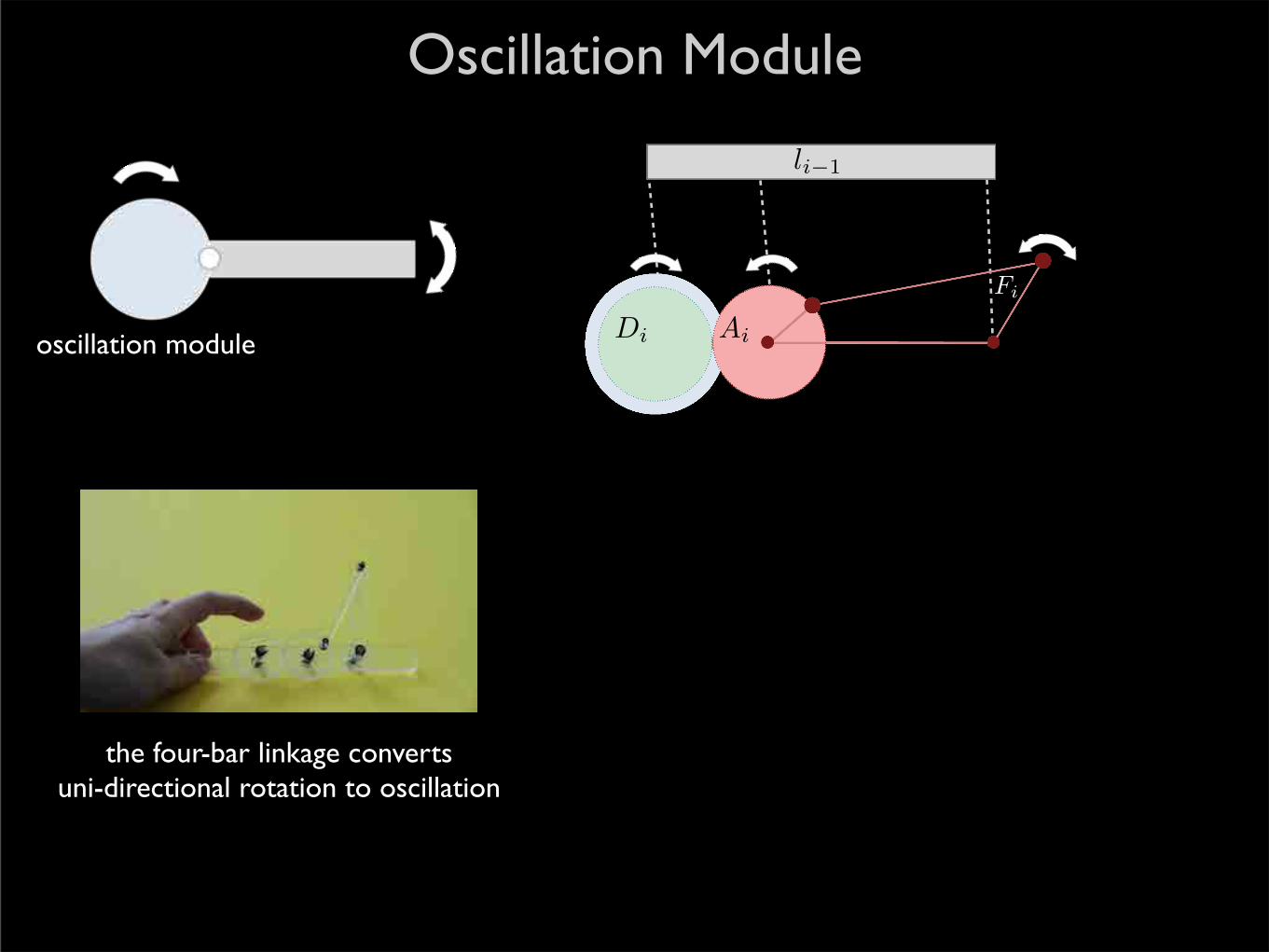
Oscillation Module
oscillation module
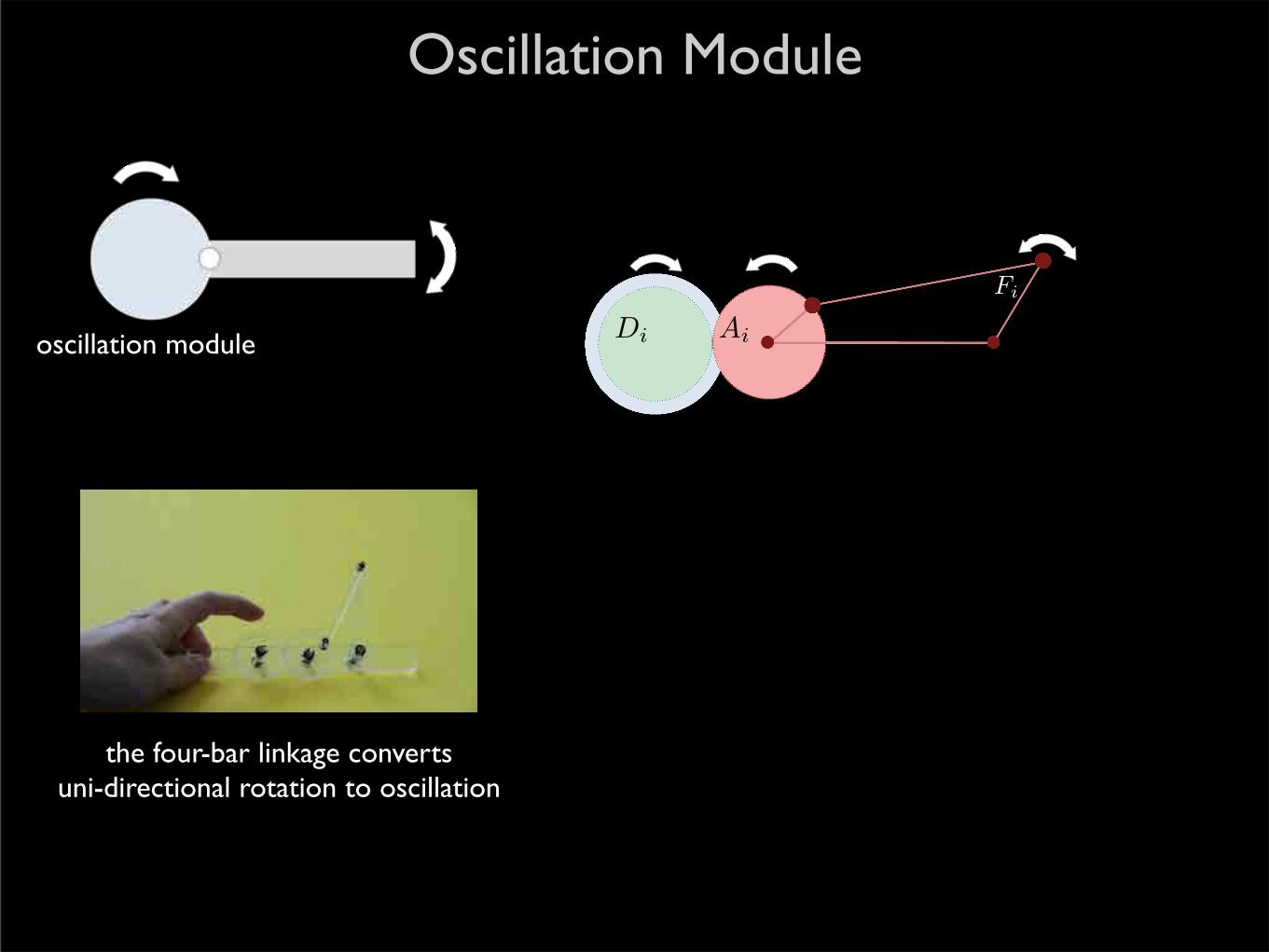
the four-bar linkage converts uni-directional rotation to oscillation
Di Ai
Fi
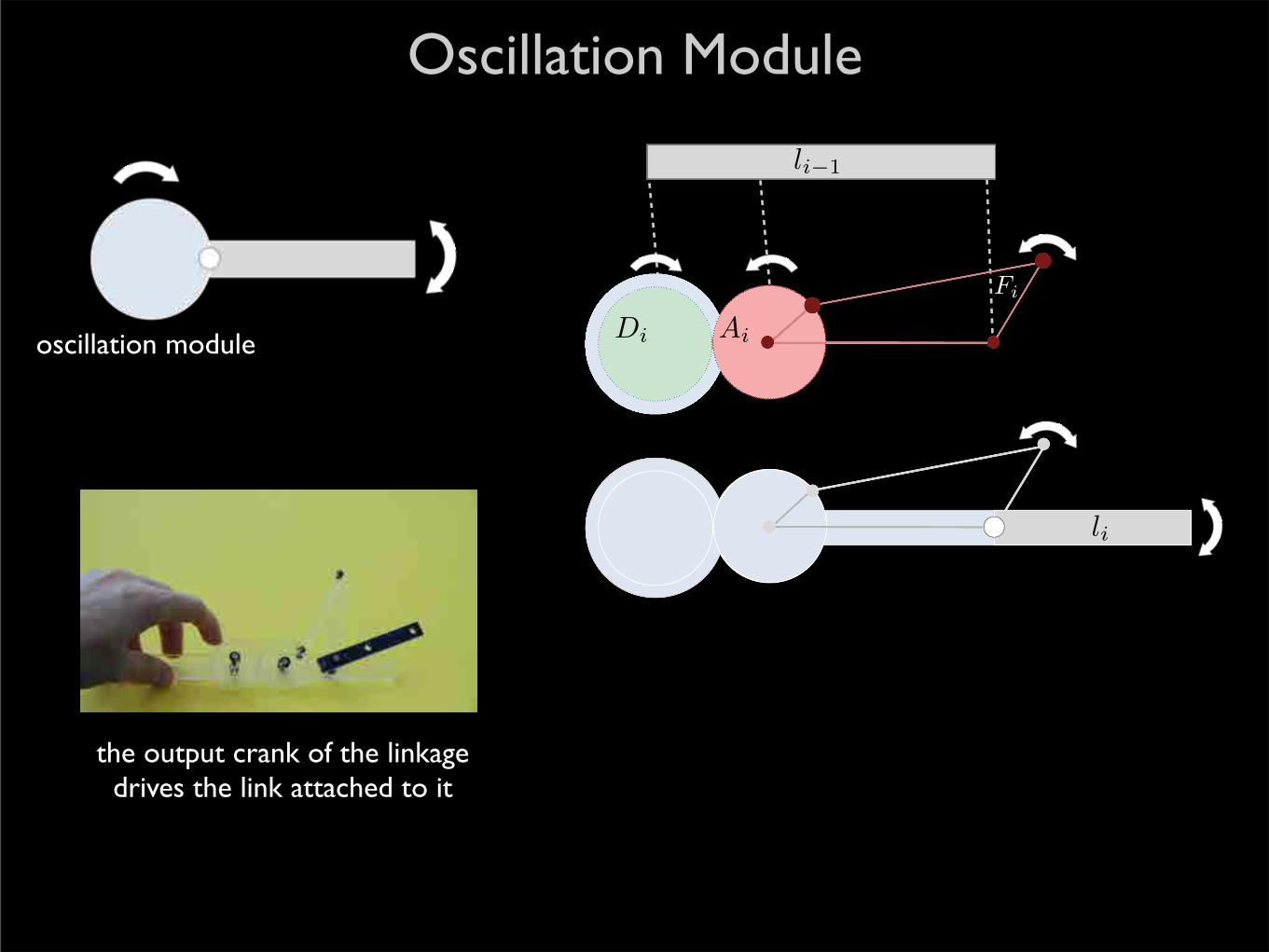
Oscillation Module
oscillation module
li�1
the four-bar linkage converts uni-directional rotation to oscillation
Di Ai
Fi
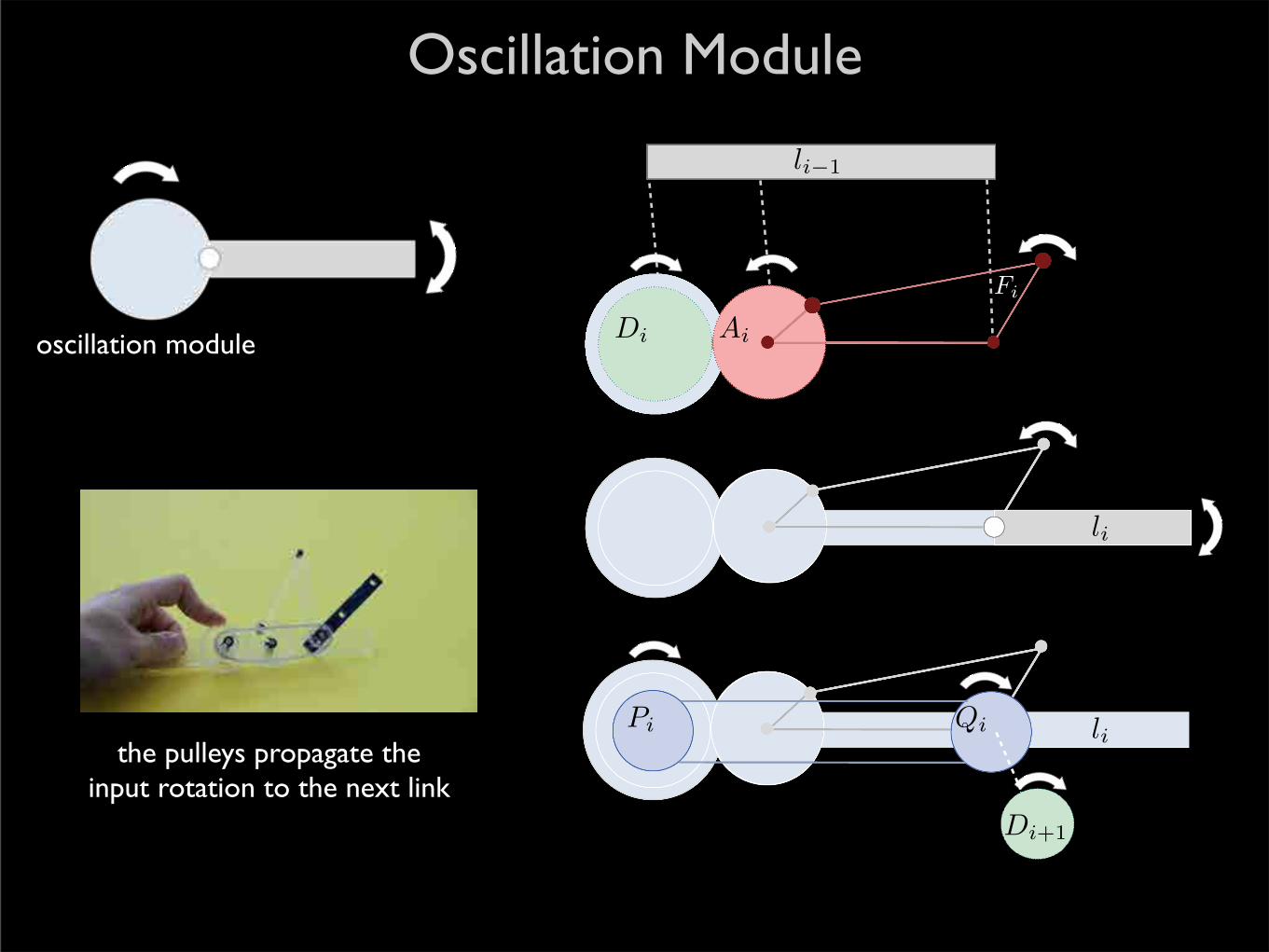
Oscillation Module
oscillation module
li�1
the four-bar linkage converts uni-directional rotation to oscillation
Di Ai
Fi
li
the output crank of the linkage drives the link attached to it
Oscillation Module
oscillation module
li�1
the four-bar linkage converts uni-directional rotation to oscillation
Di Ai
Fi
li
the output crank of the linkage drives the link attached to it the pulleys propagate the
input rotation to the next link
Pi Qi li
Di+1
Oscillation Module
oscillation module
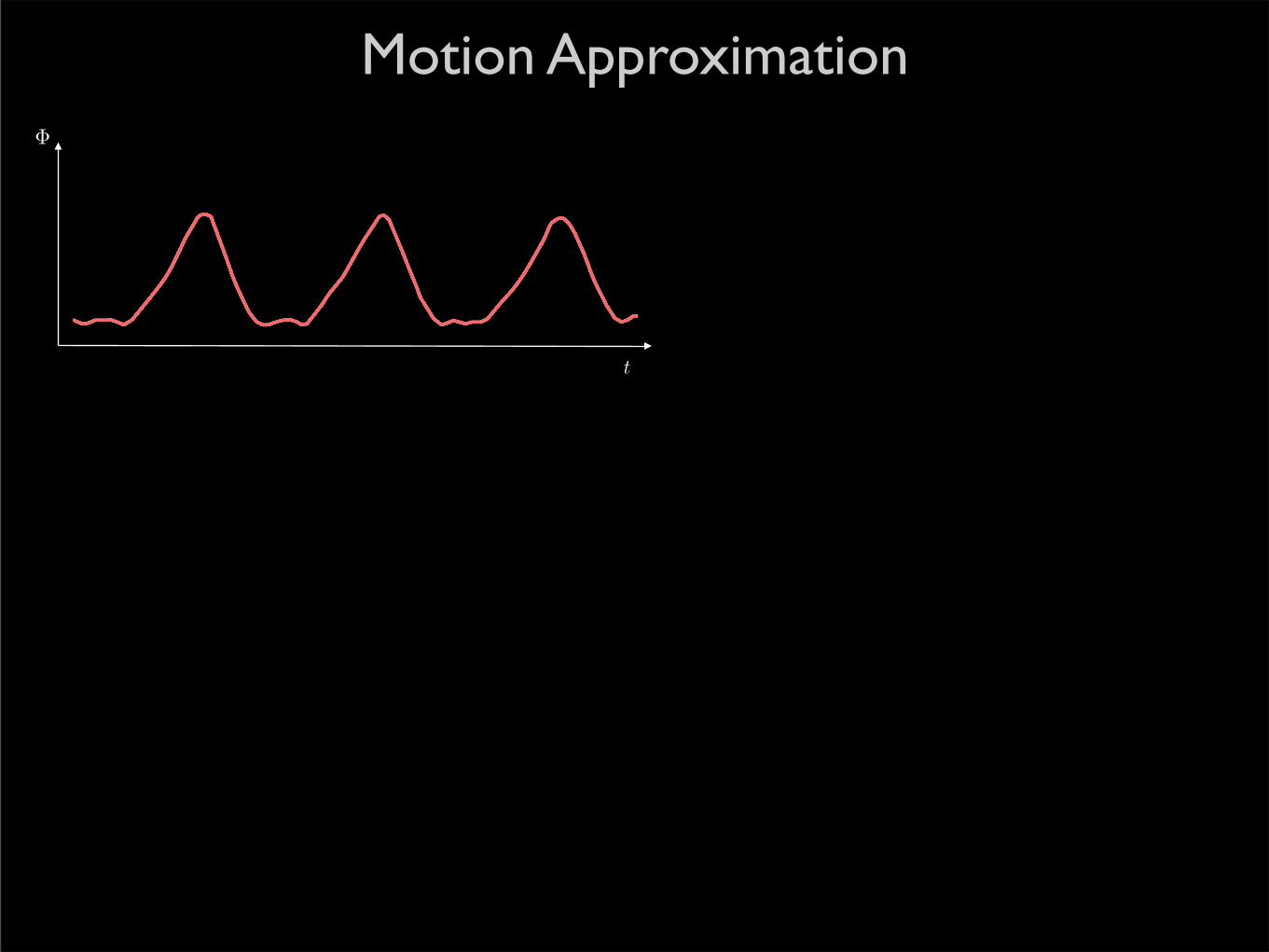
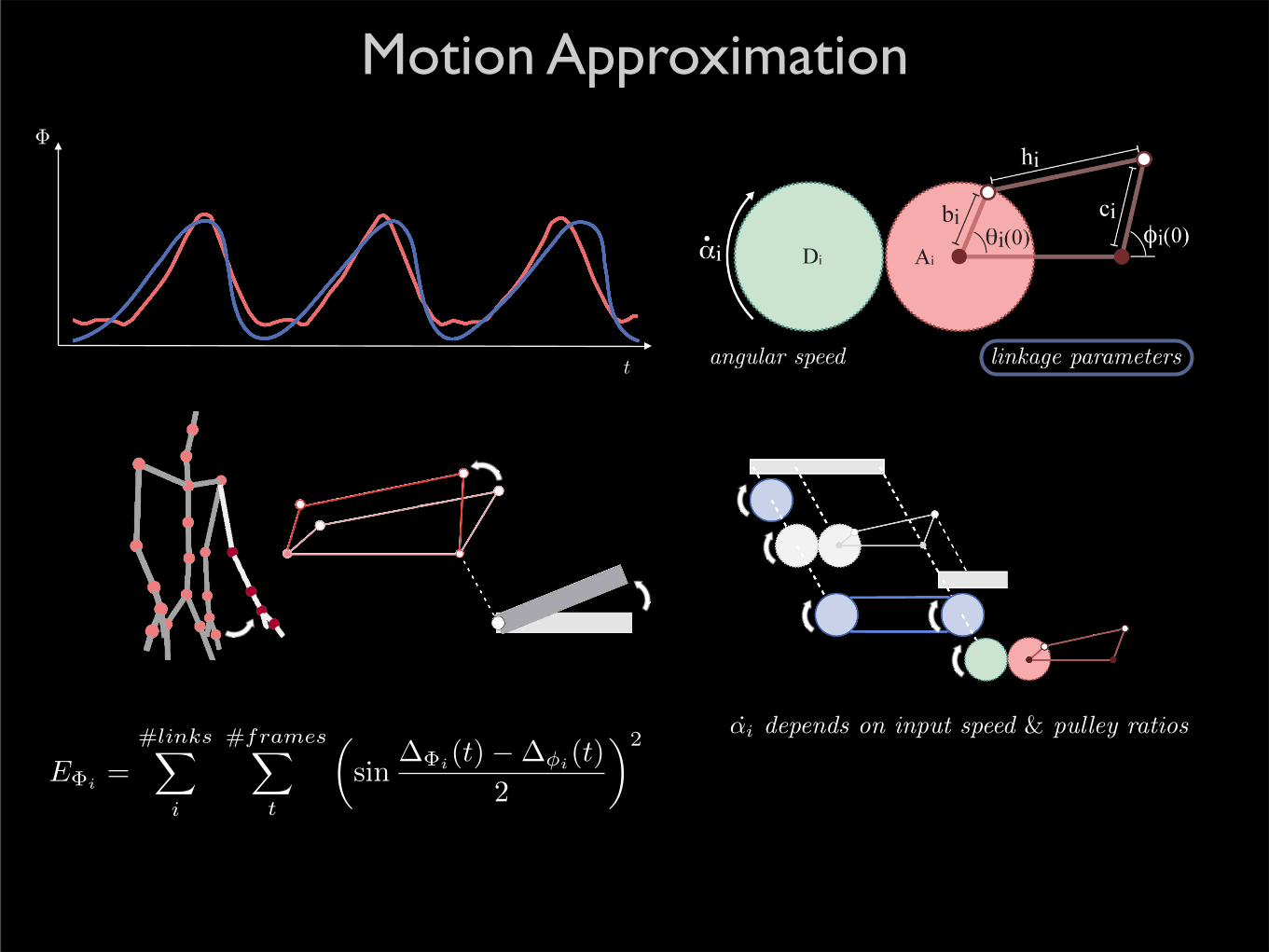
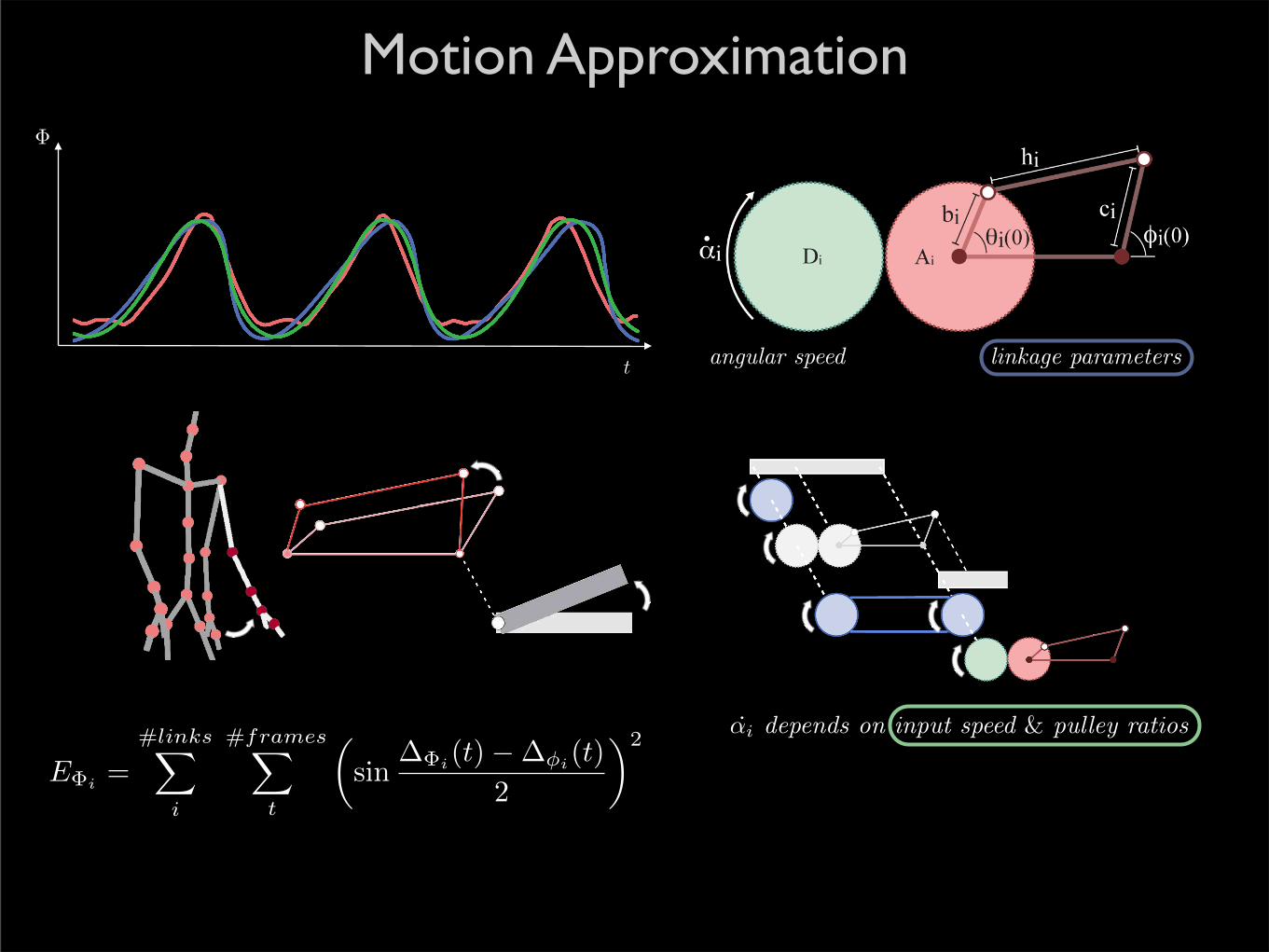
Motion Approximation
t
�
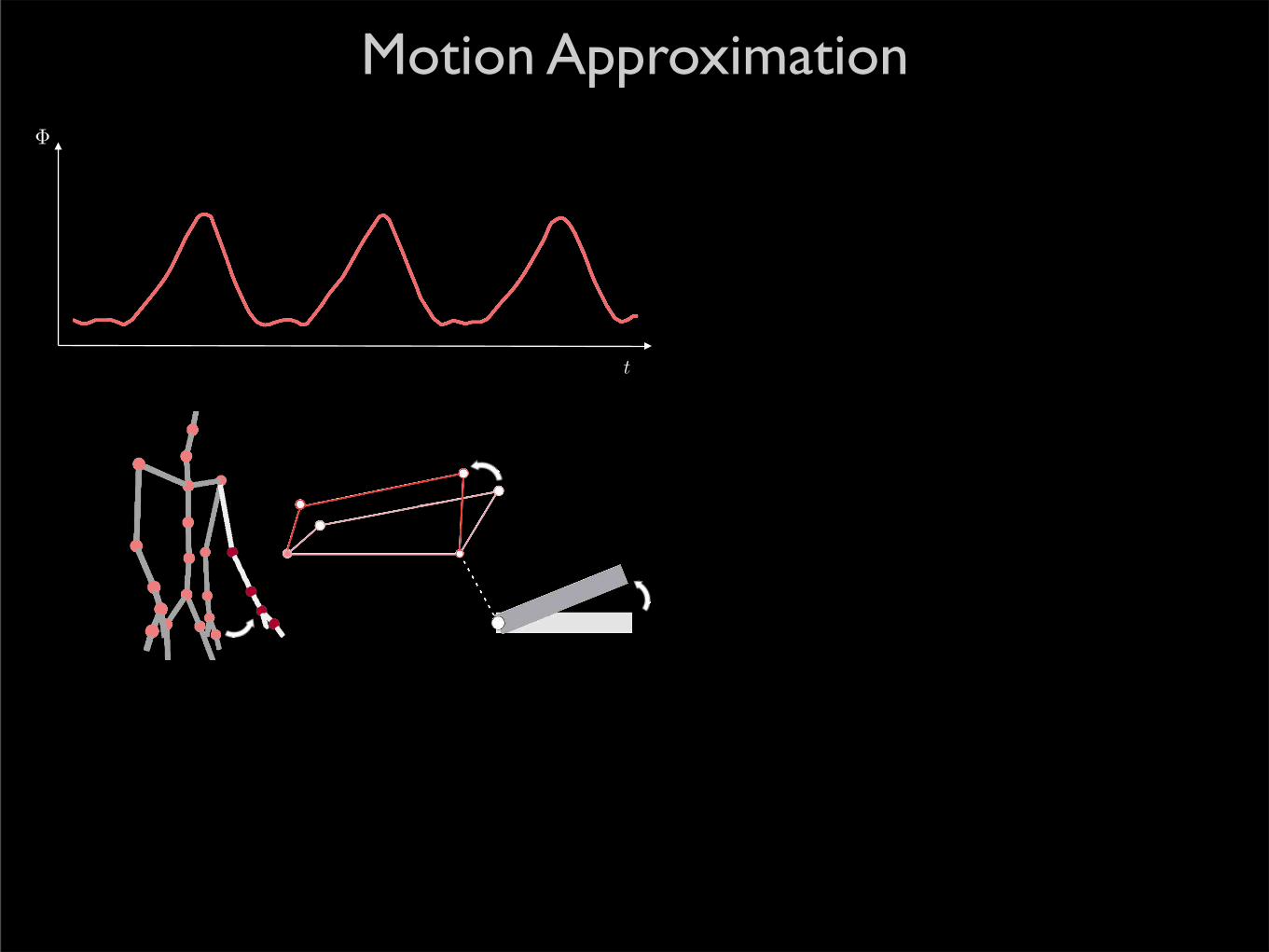
Motion Approximation
t
�
��i
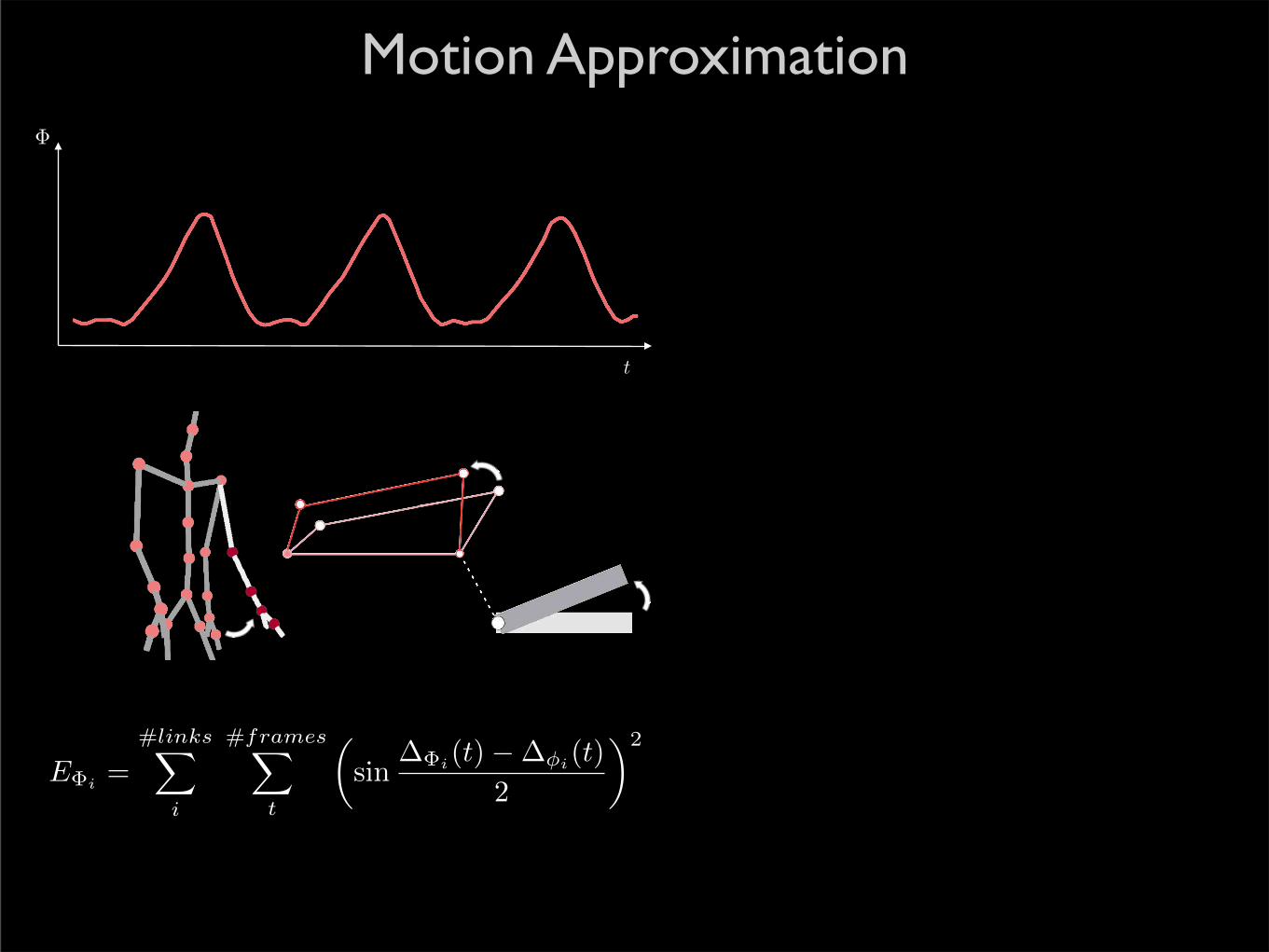
Motion Approximation
t
�
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
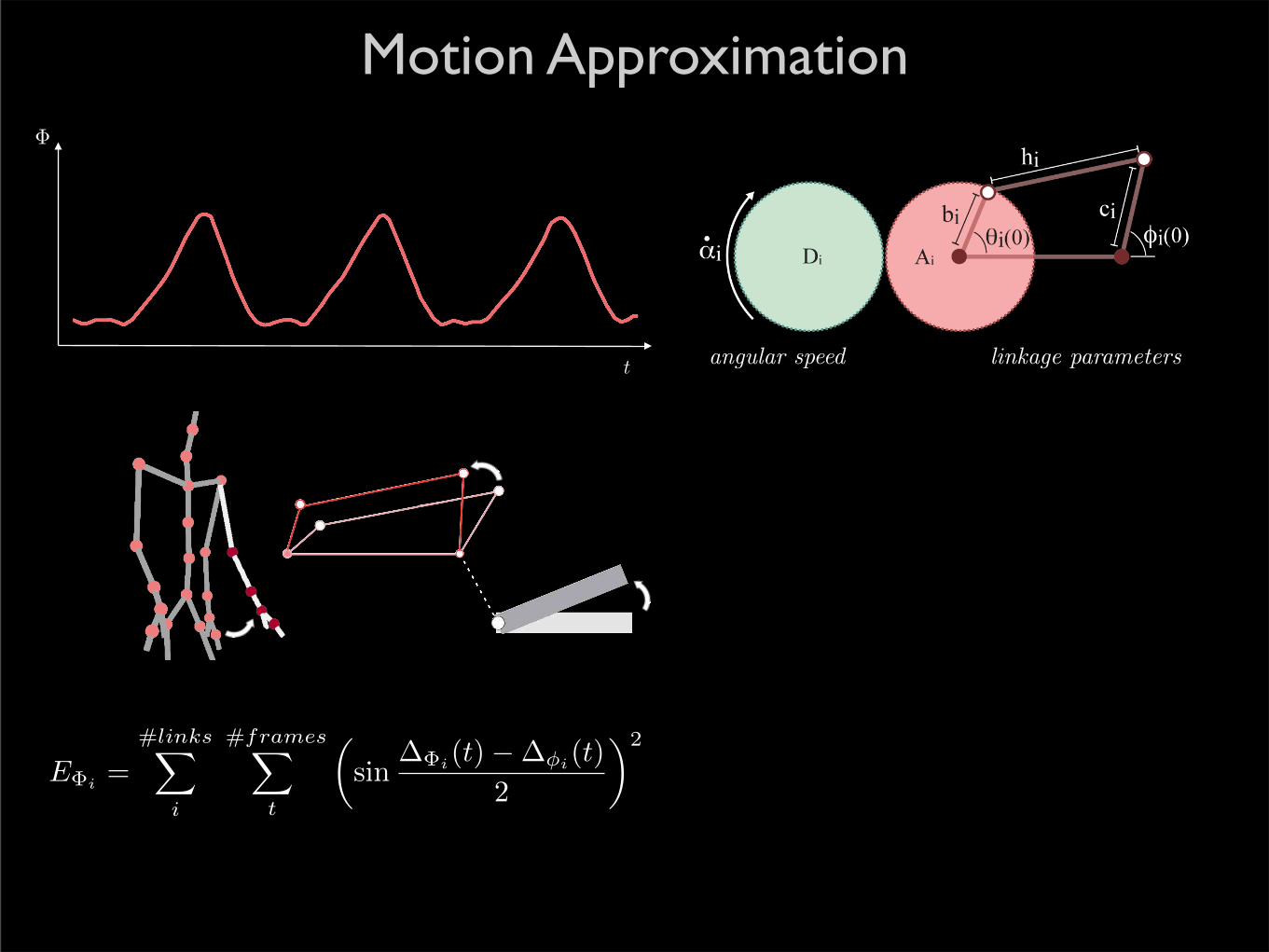
linkage parametersangular speed
Motion Approximation
t
�
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
linkage parametersangular speed
Motion Approximation
t
�
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
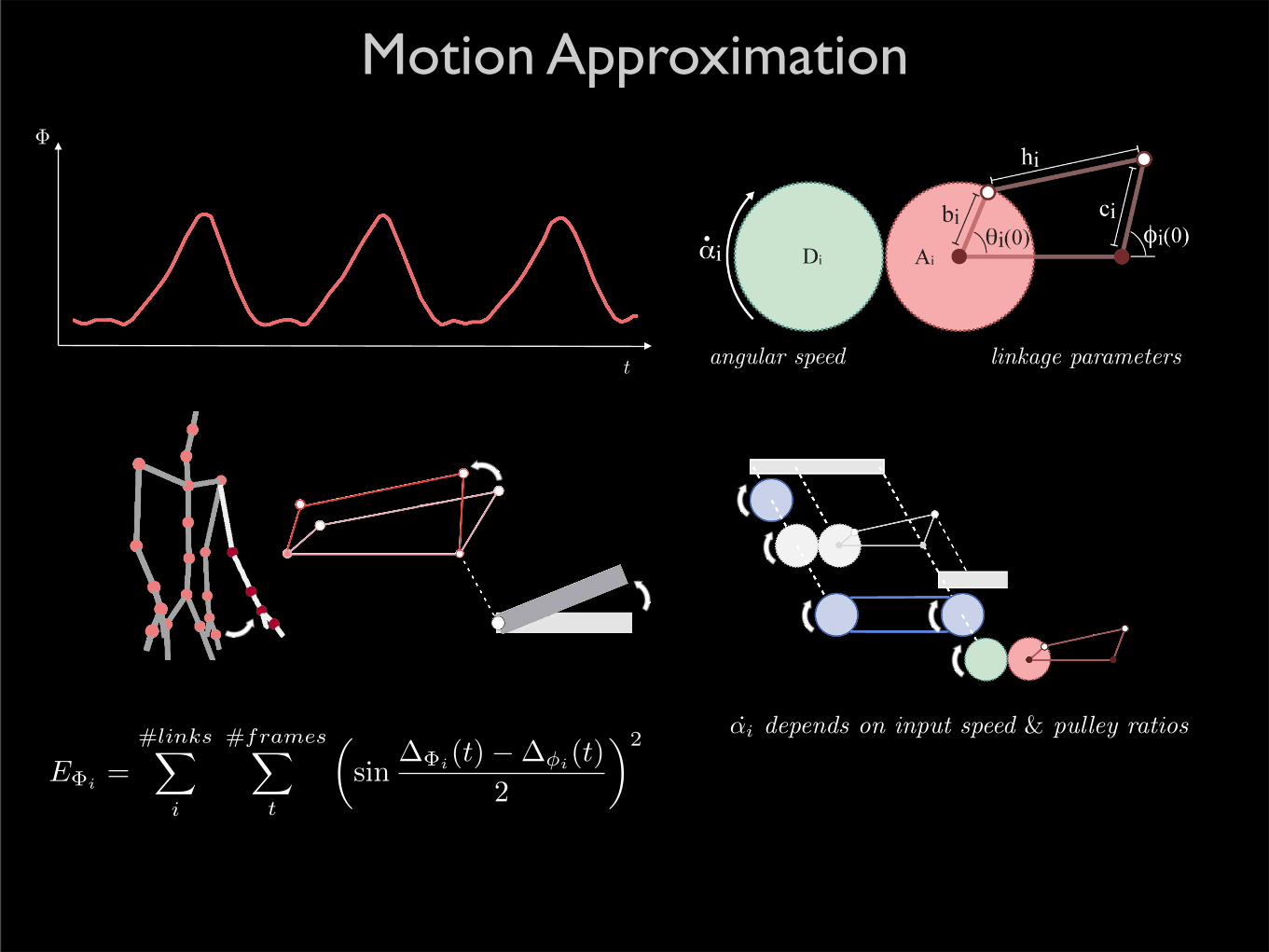
��i�1
�↵��↵ +��i�1
↵̇i depends on input speed & pulley ratios
linkage parametersangular speed
Motion Approximation
t
�
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
��i�1
�↵��↵ +��i�1
↵̇i depends on input speed & pulley ratios
linkage parametersangular speed
Motion Approximation
t
�
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
��i�1
�↵��↵ +��i�1
↵̇i depends on input speed & pulley ratios
linkage parametersangular speed
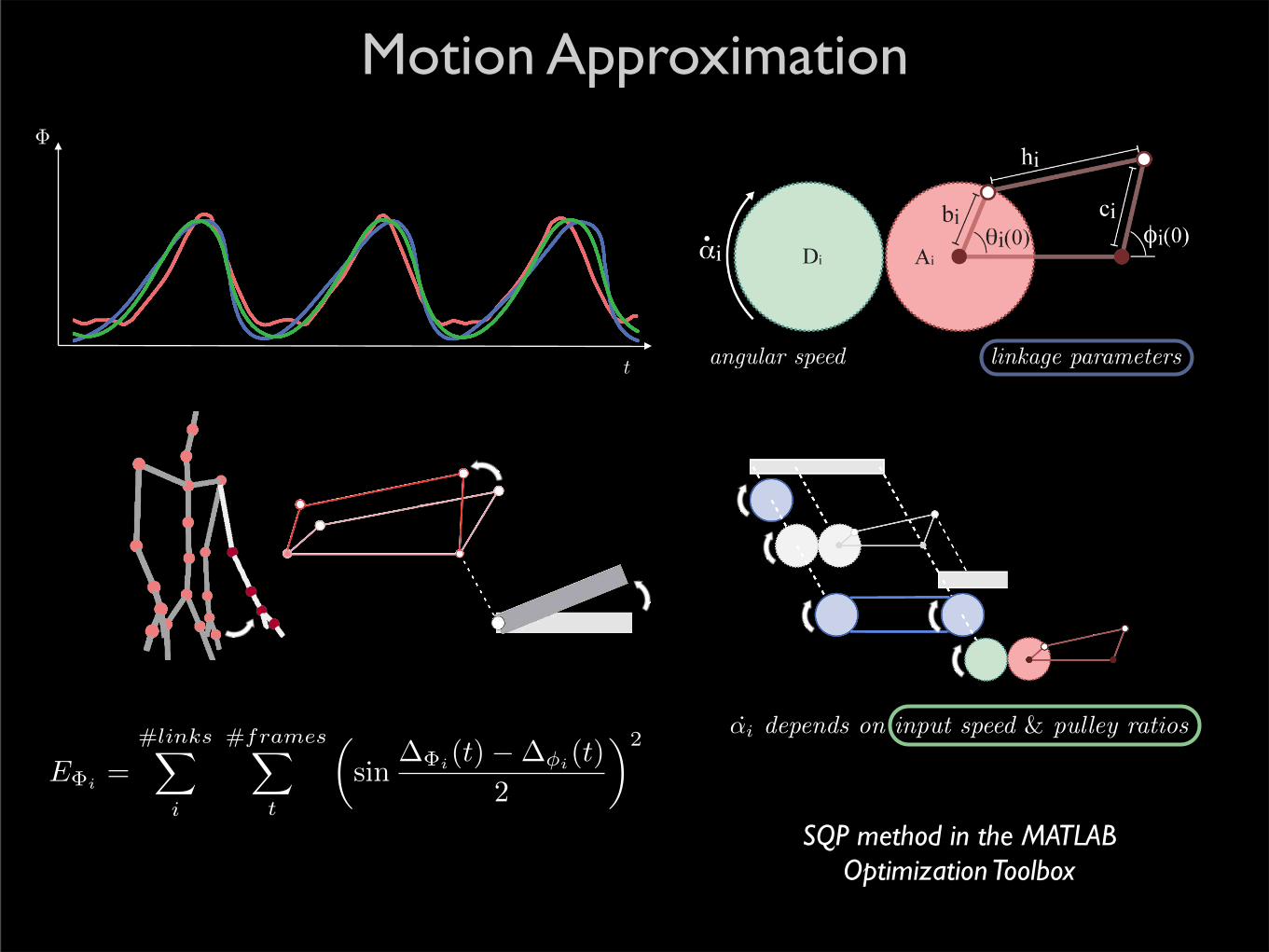
Motion Approximation
t
�
SQP method in the MATLAB Optimization Toolbox
E�i =#linksX
i
#framesX
t
✓sin
��i(t)���i(t)
2
◆2
��i
��i�1
�↵��↵ +��i�1
↵̇i depends on input speed & pulley ratios
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
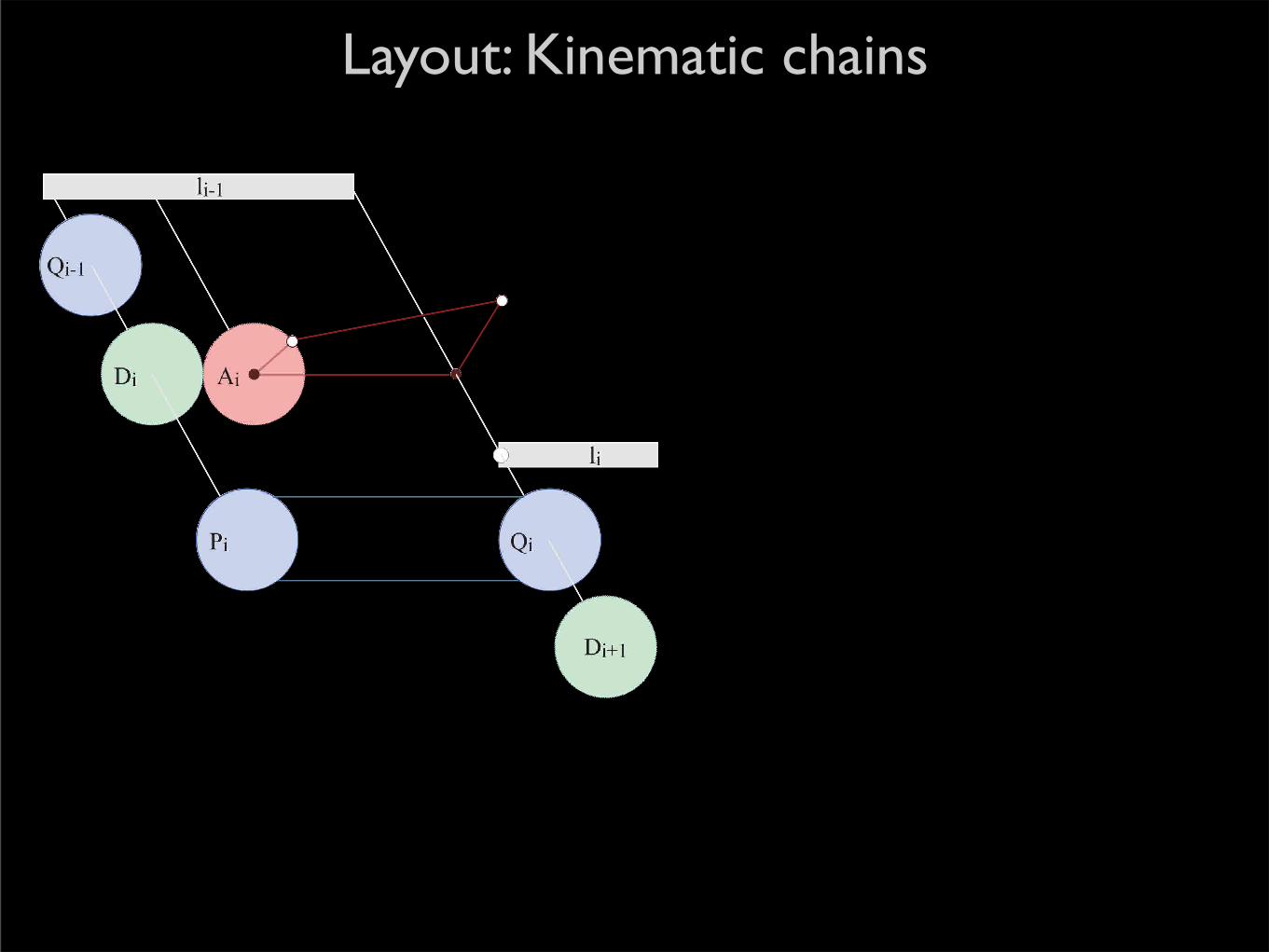
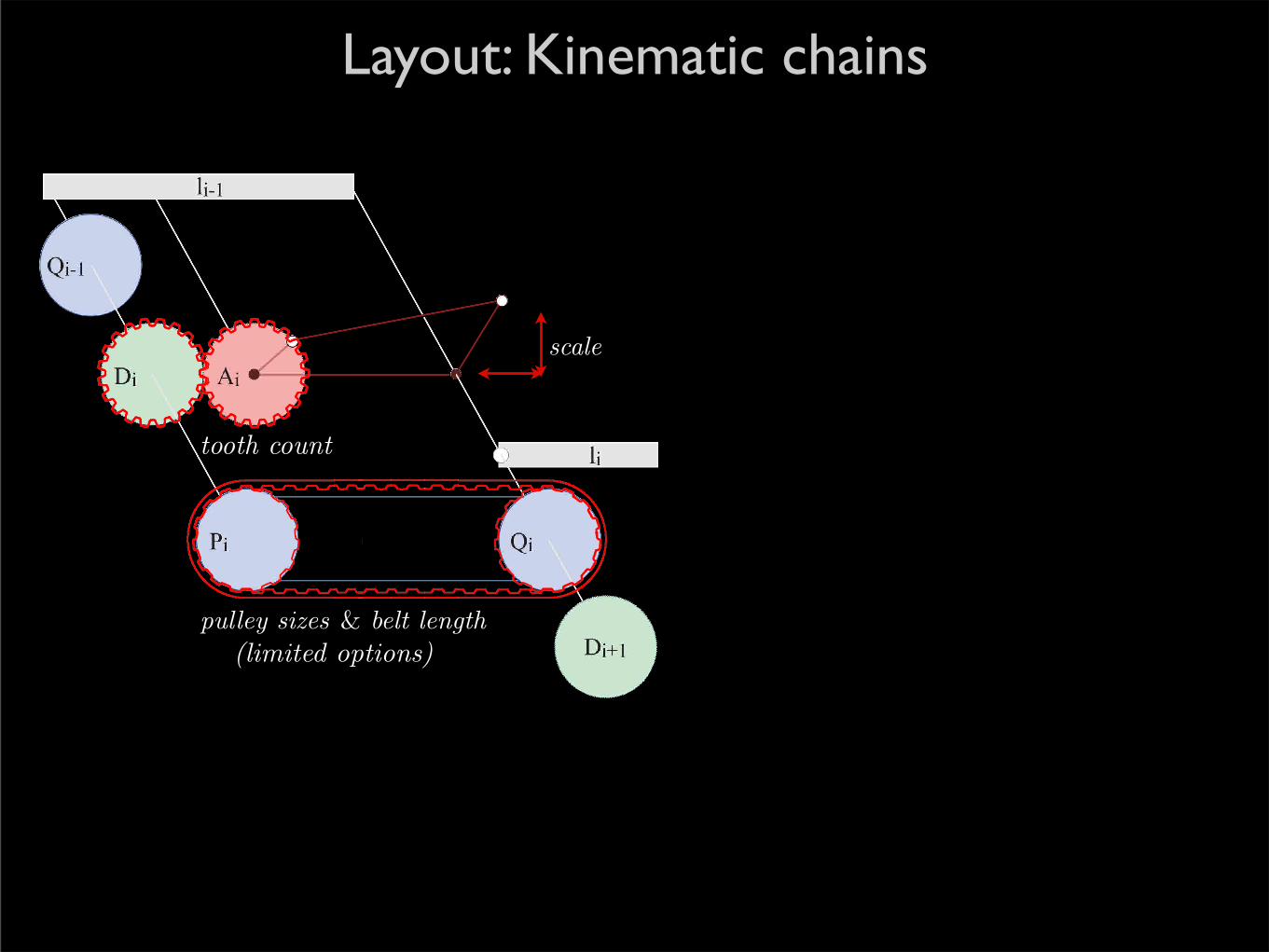
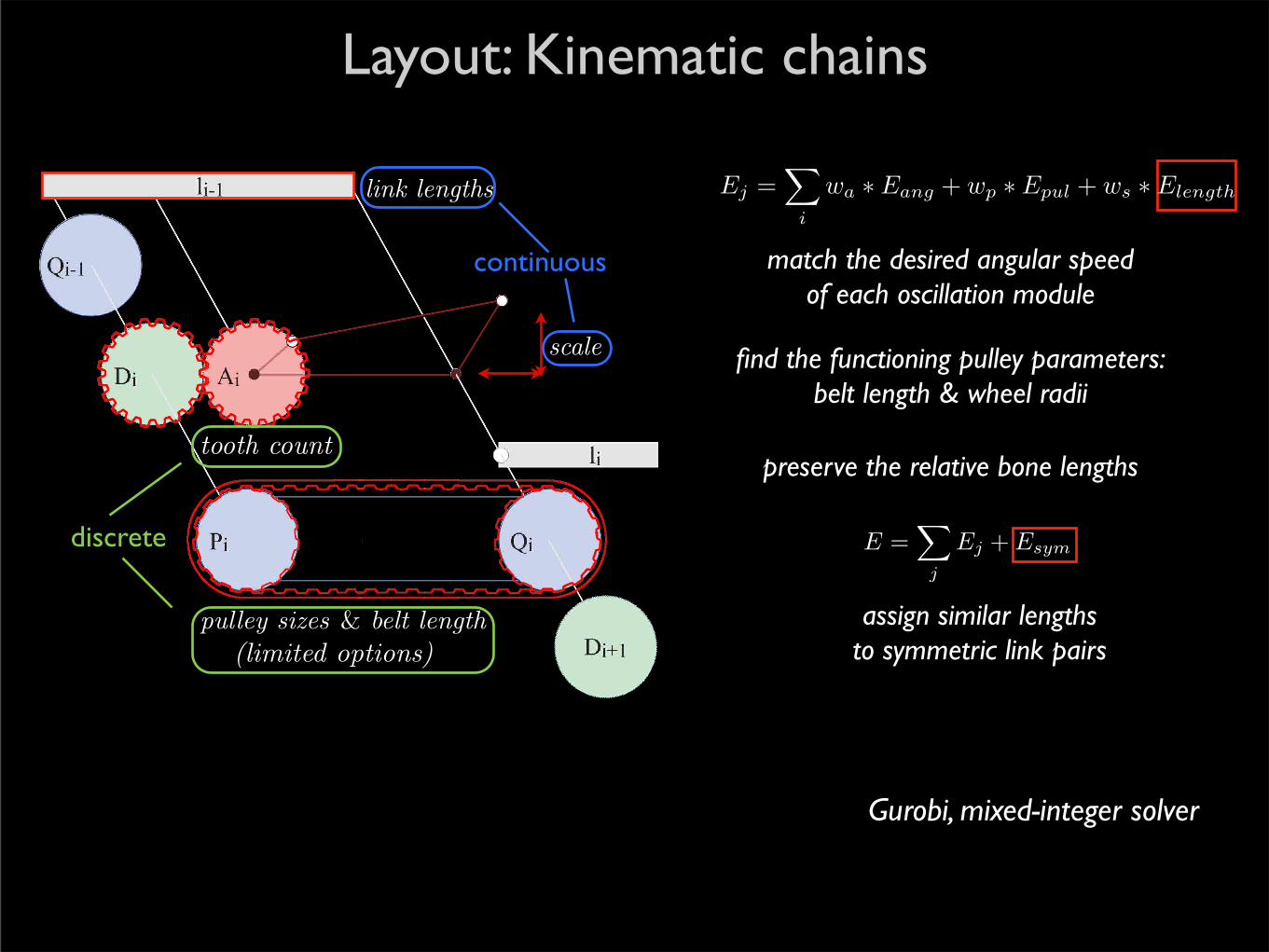
Layout: Kinematic chains
Fi
gi
Layout: Kinematic chains
Fiscale
gi
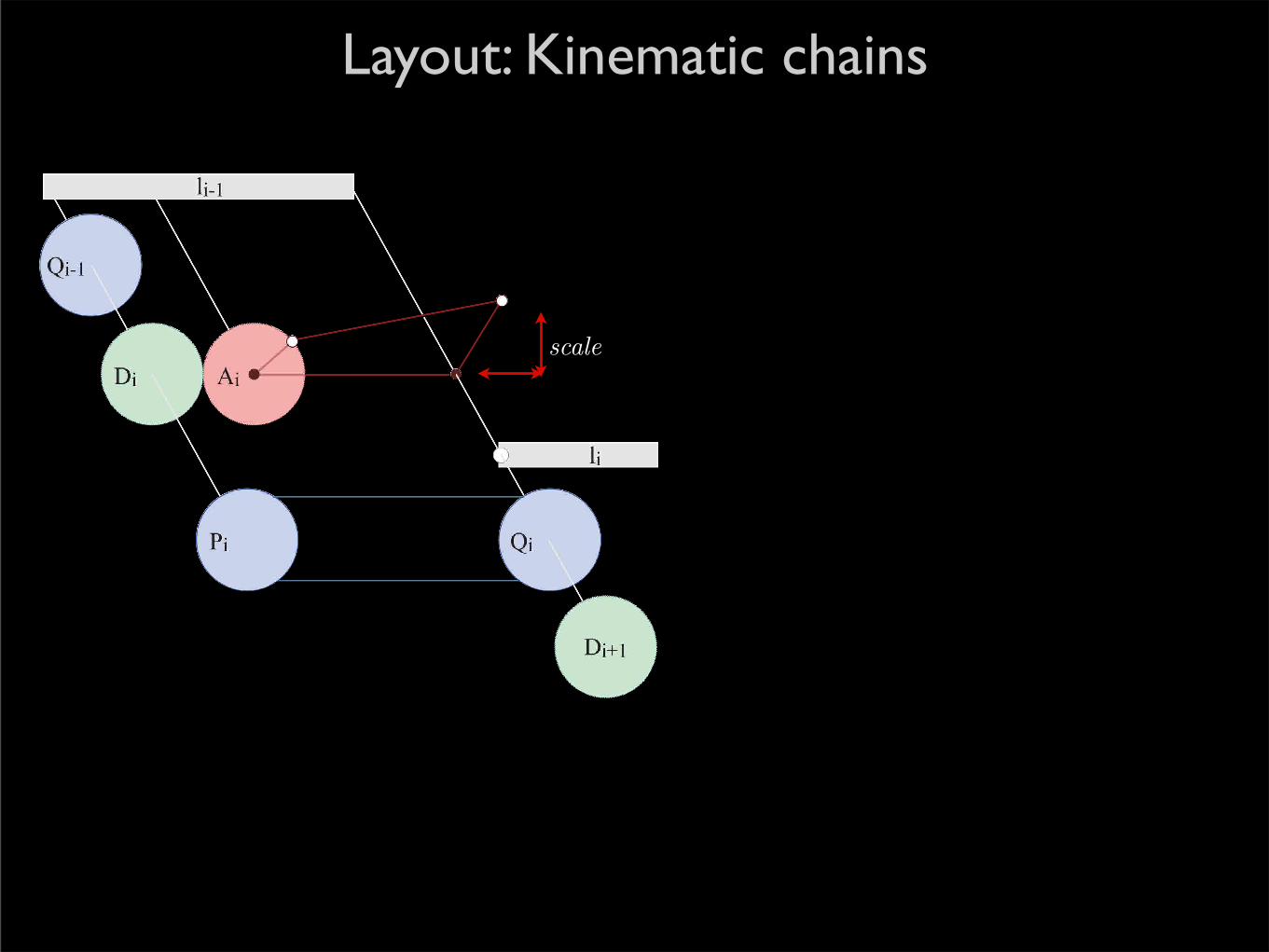
Layout: Kinematic chains
Fiscale
gi
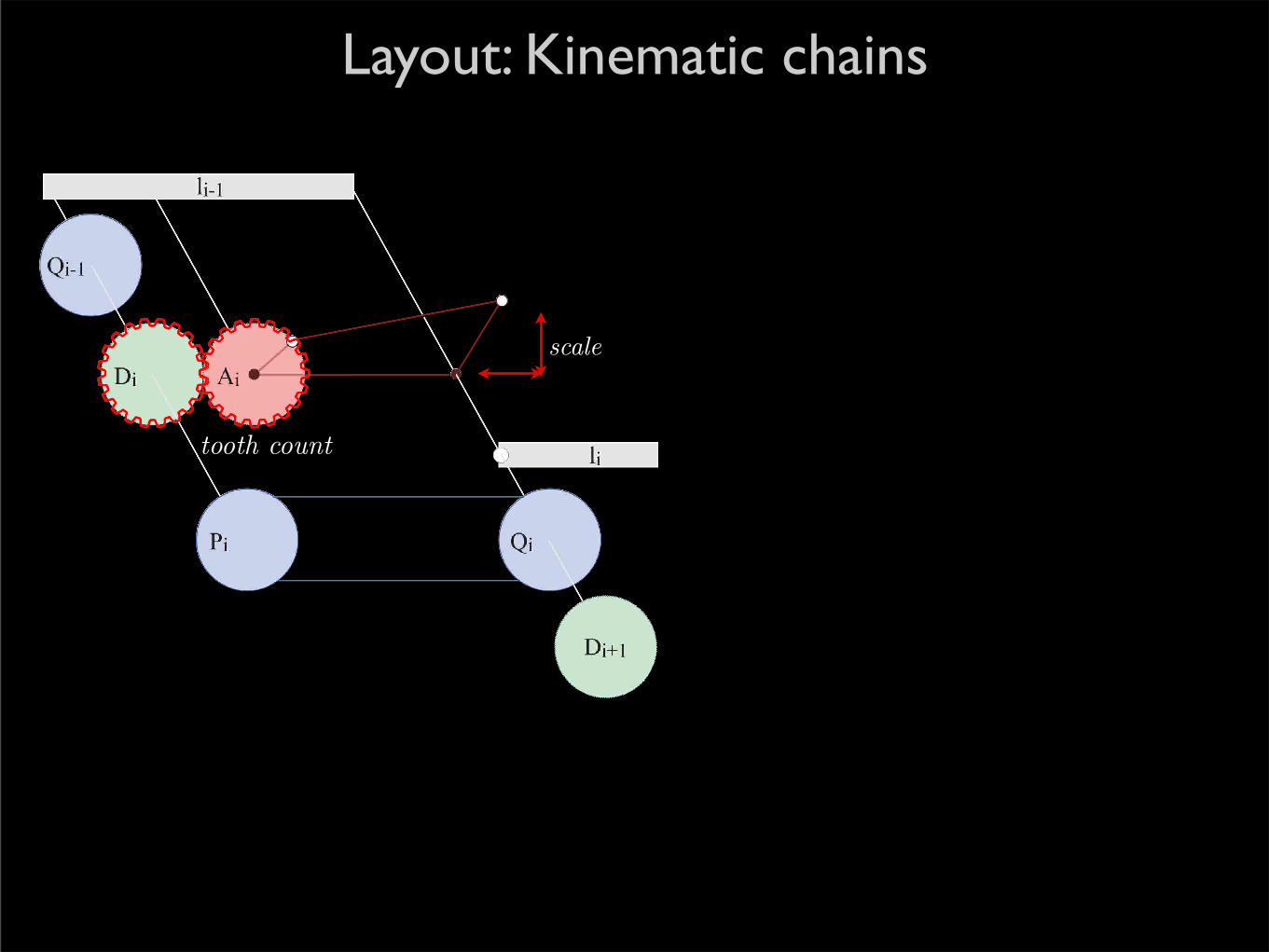
tooth count
Layout: Kinematic chains
Fiscale
gi
tooth count
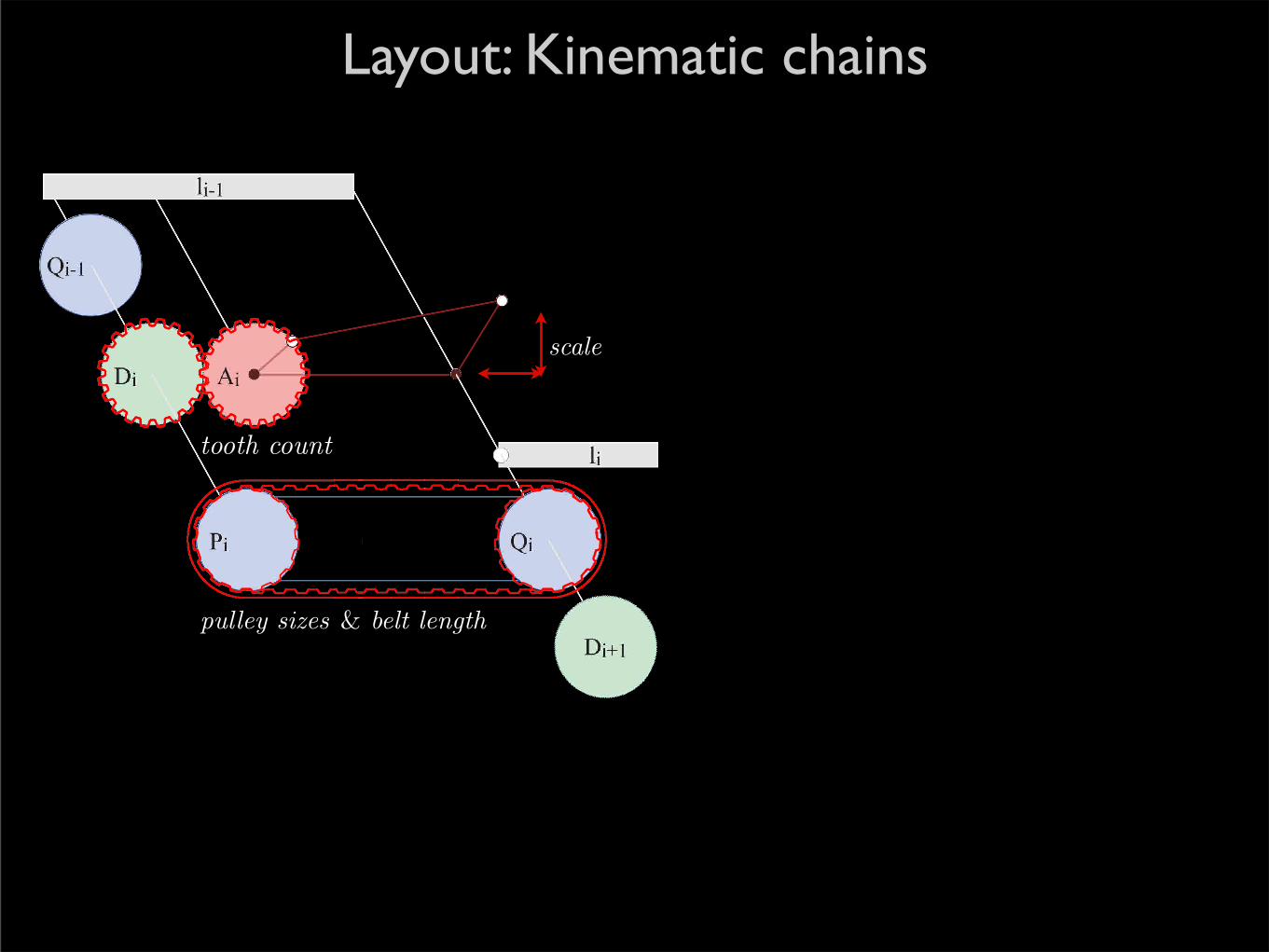
pulley sizes & belt length
Layout: Kinematic chains
Fiscale
gi
tooth count
pulley sizes & belt length(limited options)
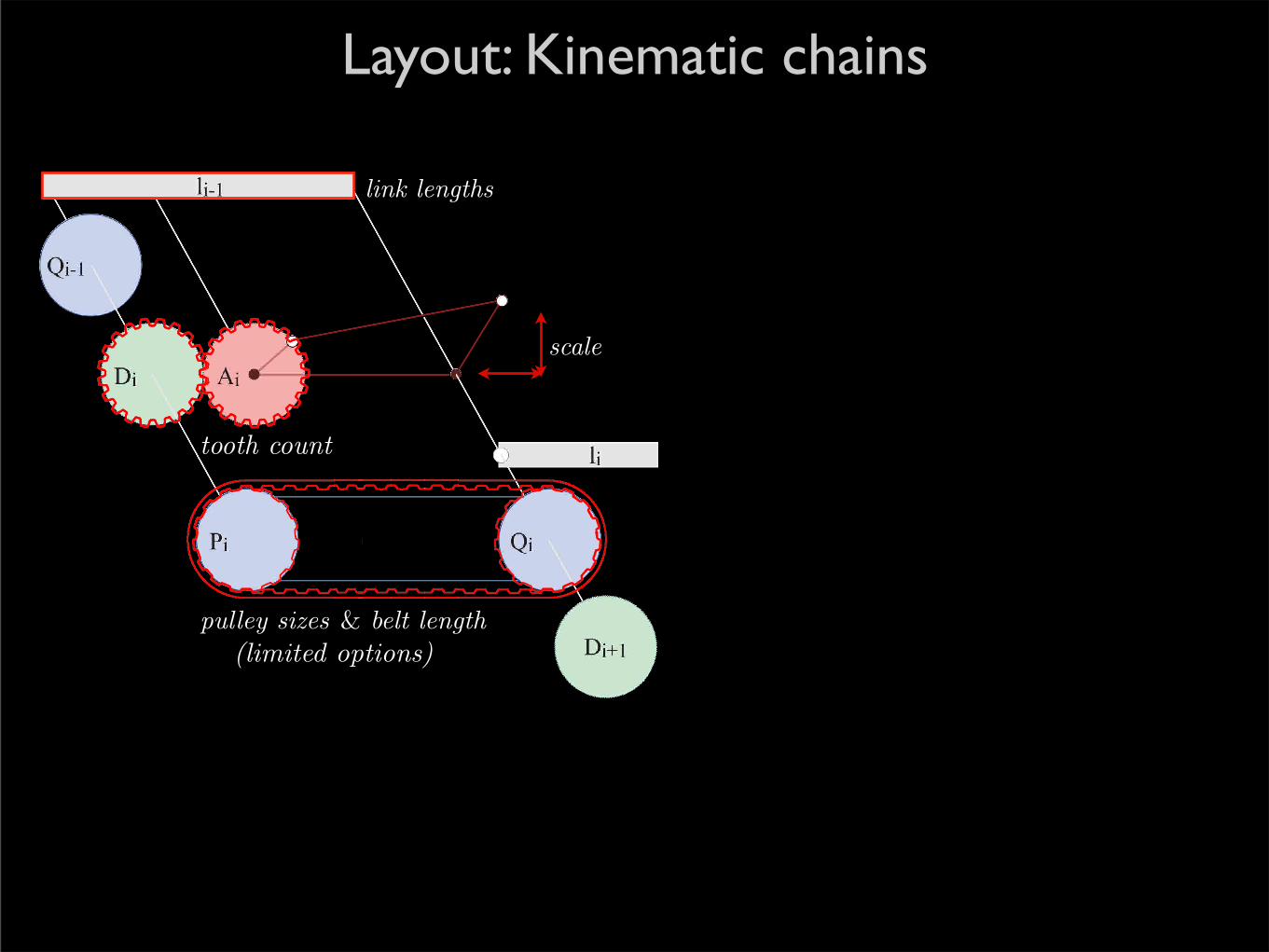
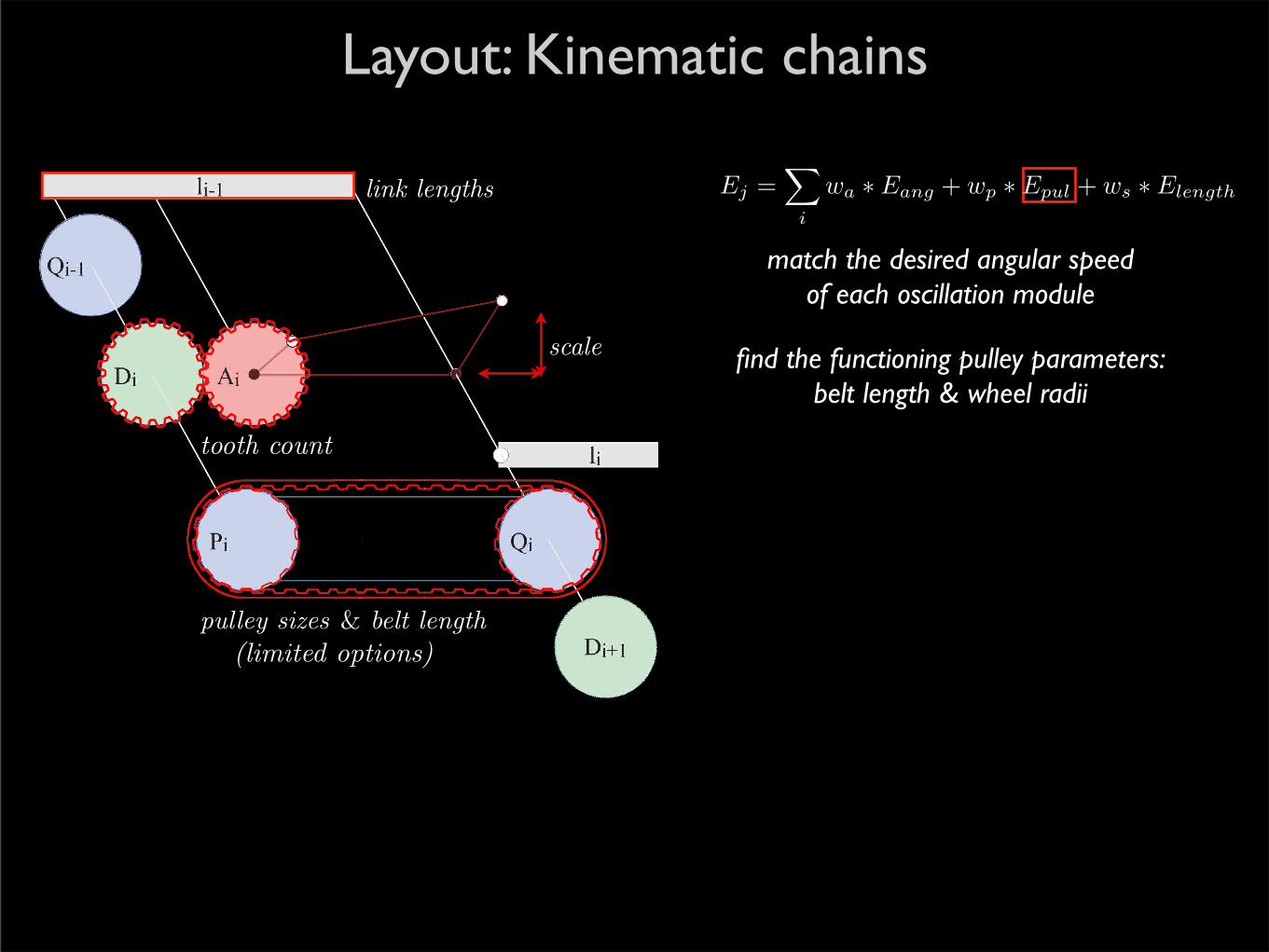
Layout: Kinematic chains
Fiscale
link lengths
gi
tooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
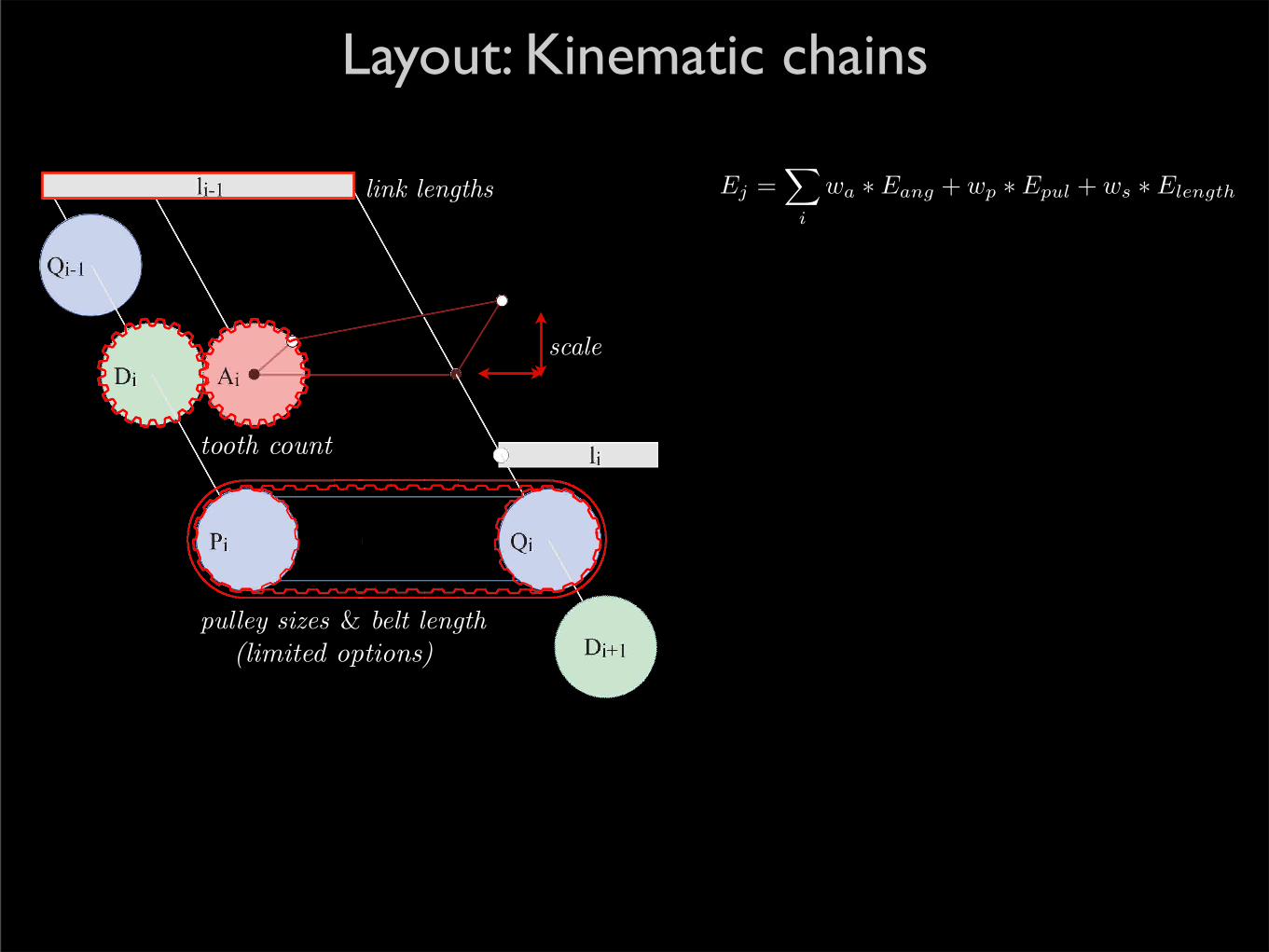
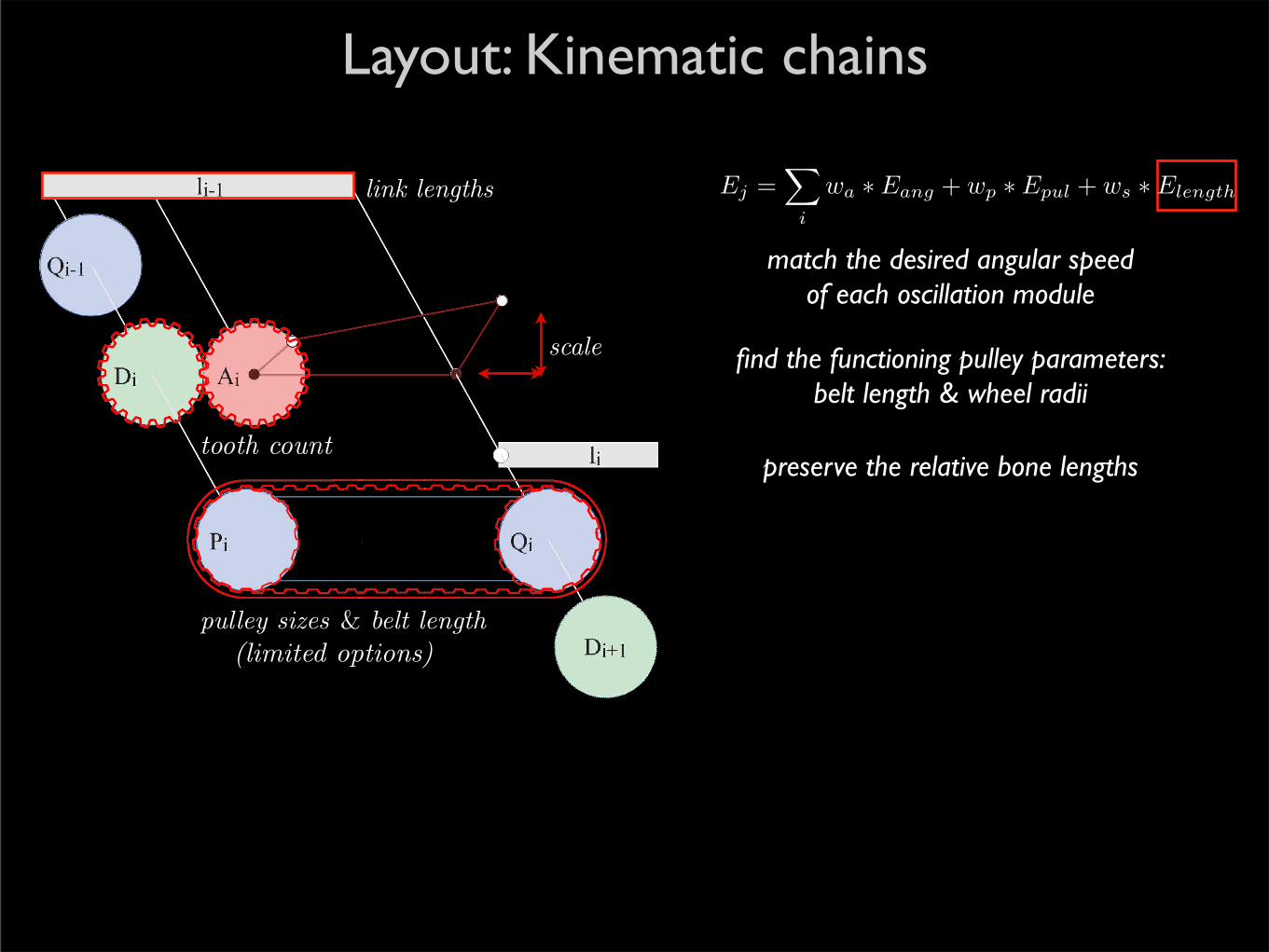
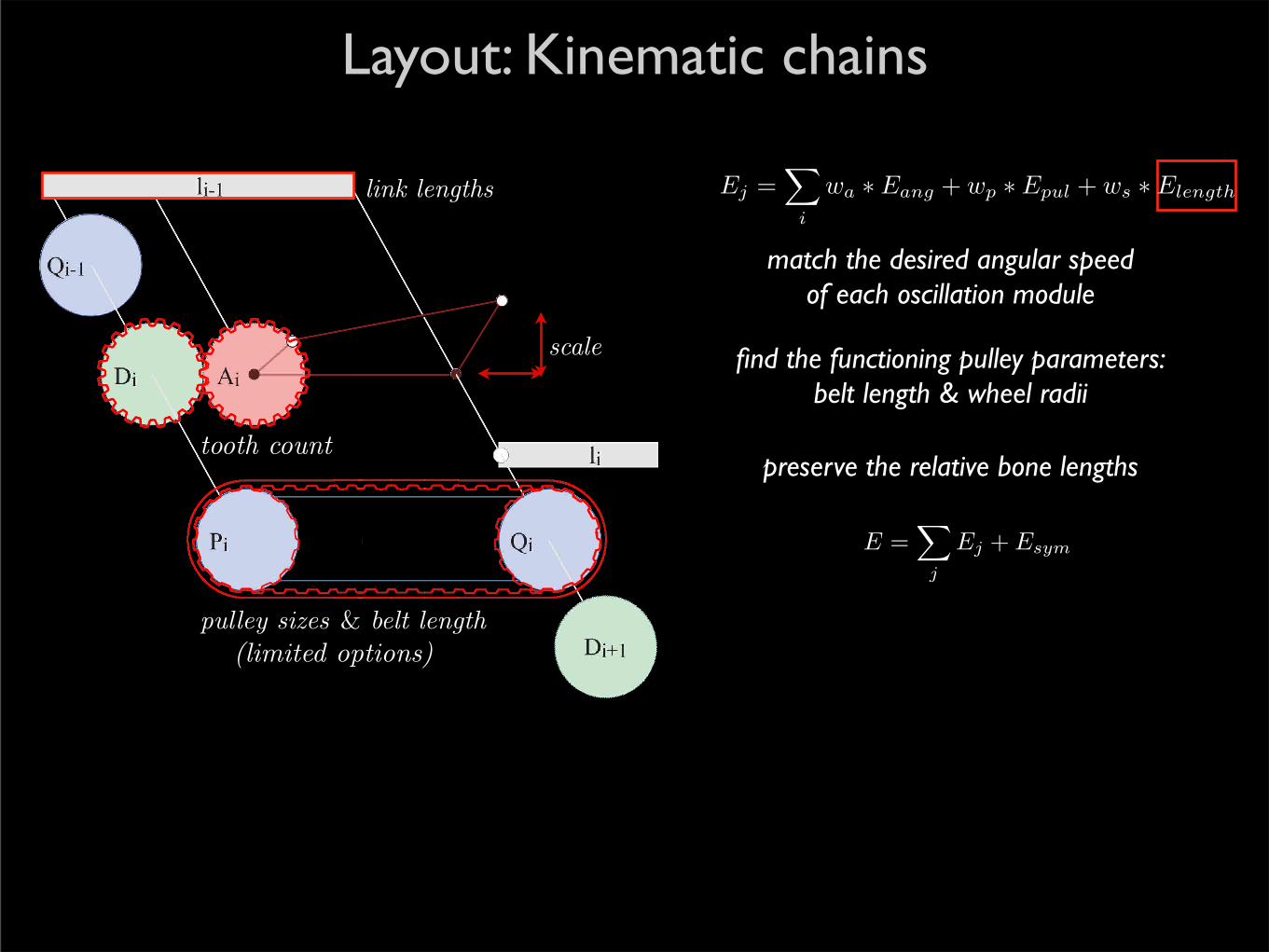
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
tooth count
pulley sizes & belt length(limited options)
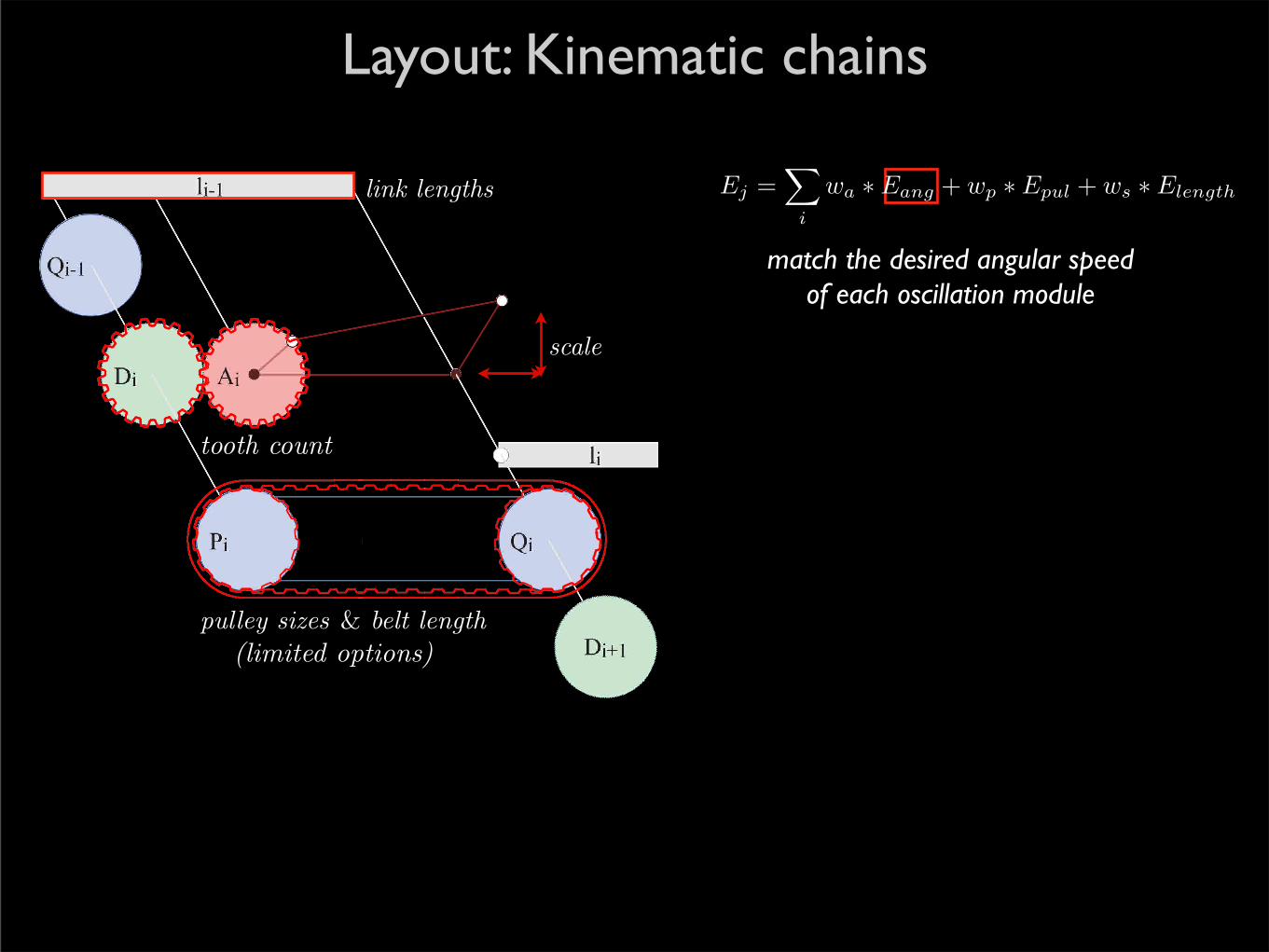
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
tooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
find the functioning pulley parameters:belt length & wheel radii
tooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
find the functioning pulley parameters:belt length & wheel radii
preserve the relative bone lengthstooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
find the functioning pulley parameters:belt length & wheel radii
preserve the relative bone lengths
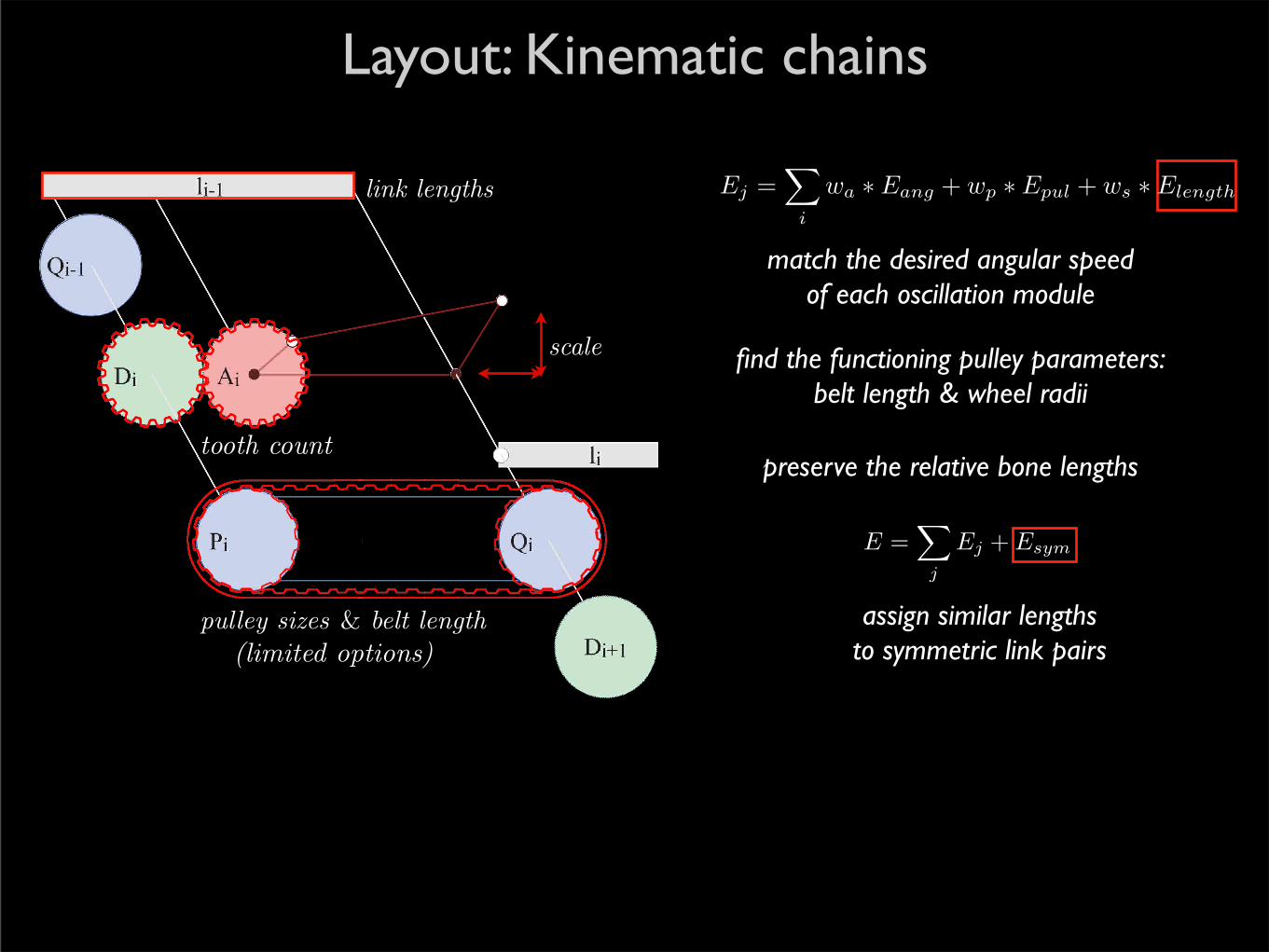
E =X
j
Ej + Esym
tooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
find the functioning pulley parameters:belt length & wheel radii
preserve the relative bone lengths
E =X
j
Ej + Esym
assign similar lengths to symmetric link pairs
tooth count
pulley sizes & belt length(limited options)
Layout: Kinematic chains
Fiscale
link lengths
gi
match the desired angular speed of each oscillation module
Ej =X
i
wa ⇤ Eang + wp ⇤ Epul + ws ⇤ Elength
find the functioning pulley parameters:belt length & wheel radii
preserve the relative bone lengths
E =X
j
Ej + Esym
assign similar lengths to symmetric link pairs
Gurobi, mixed-integer solver
tooth count
pulley sizes & belt length(limited options)
continuous
discrete
Layout: Unified design

Layout: Unified design
bevel gearsoscillation modulepulleysfour-bar linkage bevel gearsoscillation modulepulleysfour-bar linkage
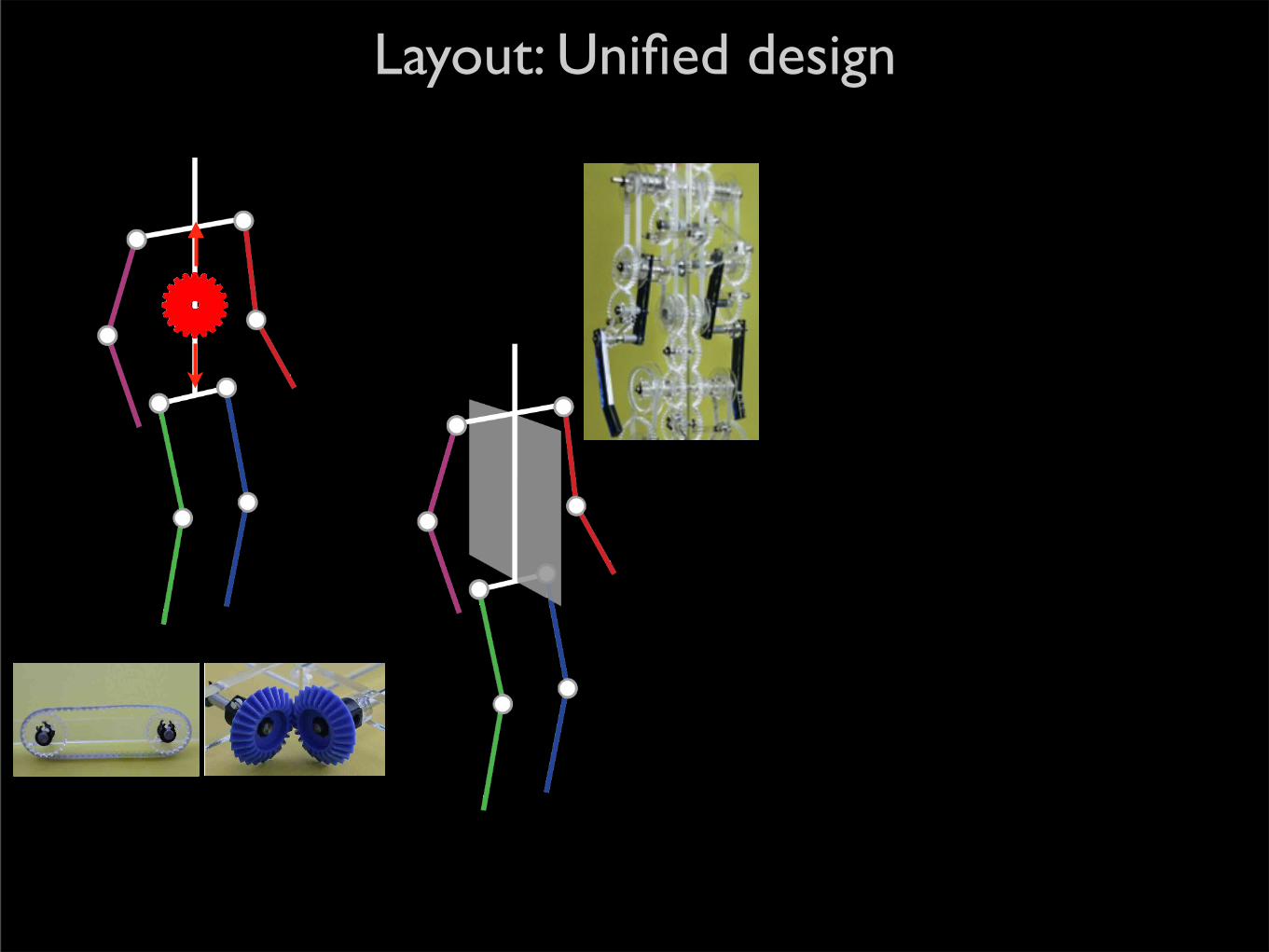
Layout: Unified design
bevel gearsoscillation modulepulleysfour-bar linkage bevel gearsoscillation modulepulleysfour-bar linkage

Layout: Unified design
bevel gearsoscillation modulepulleysfour-bar linkage bevel gearsoscillation modulepulleysfour-bar linkage
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
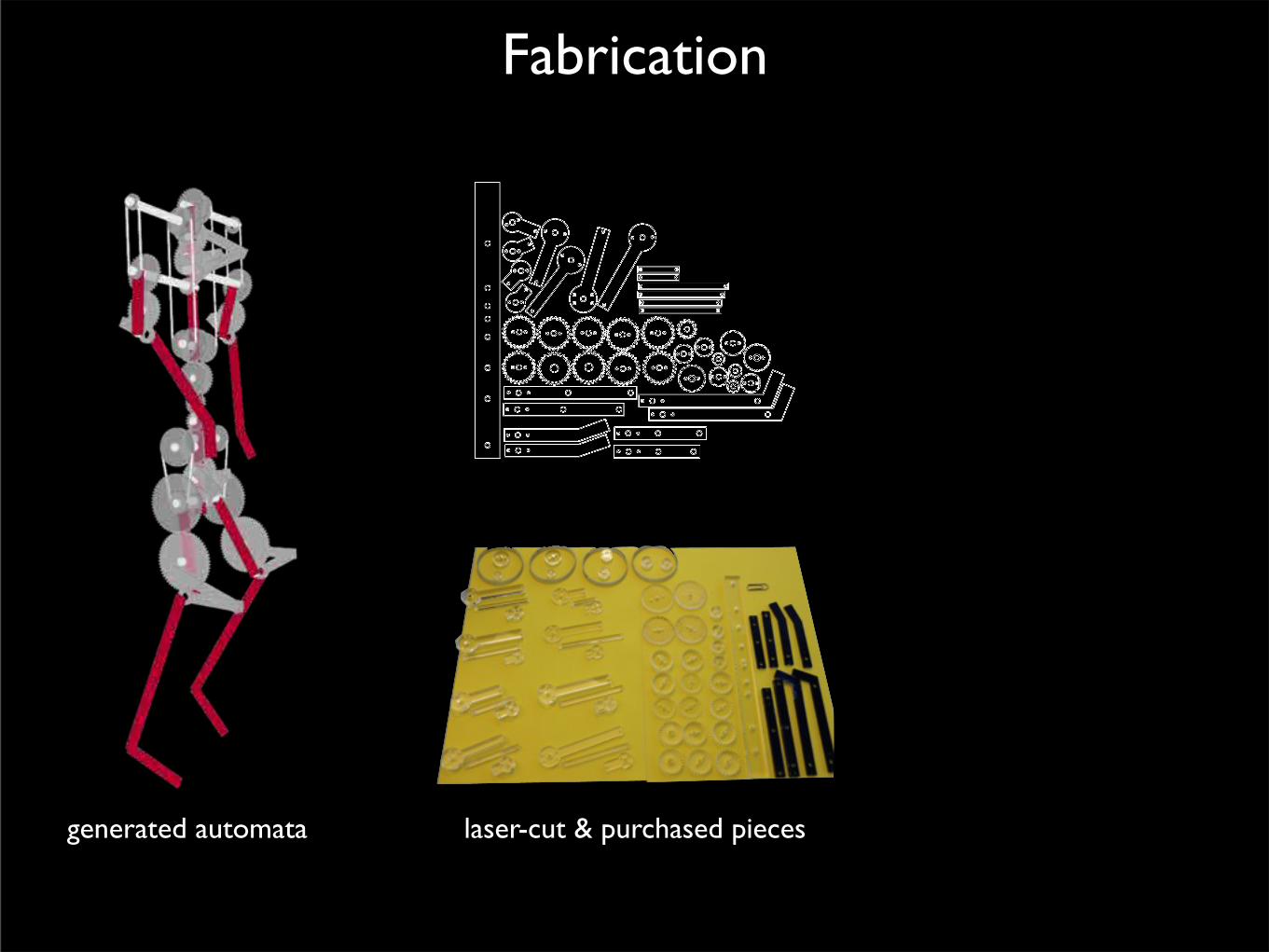
Fabrication
generated automata laser-cut & purchased pieces
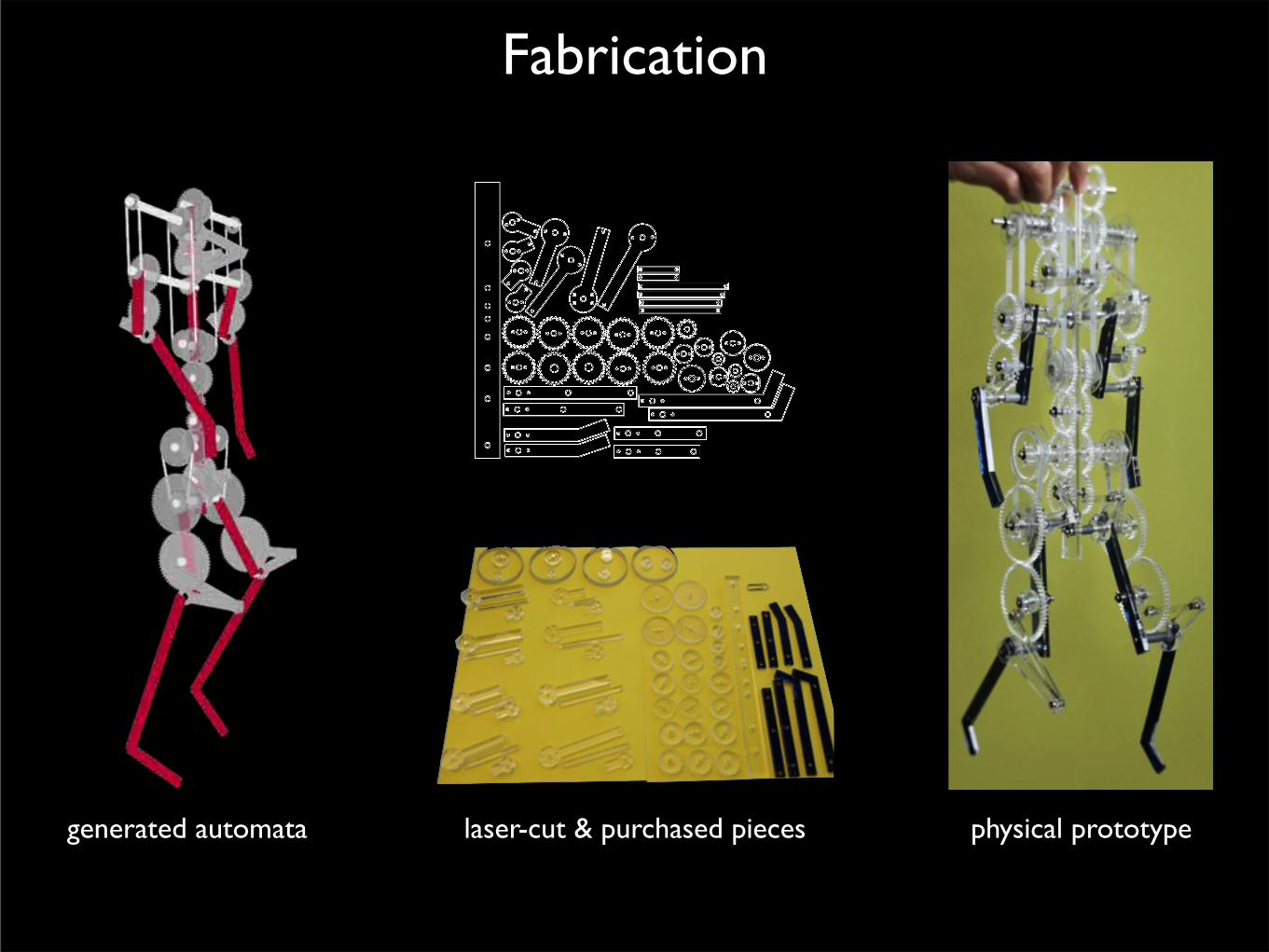
Fabrication
generated automata laser-cut & purchased pieces physical prototype
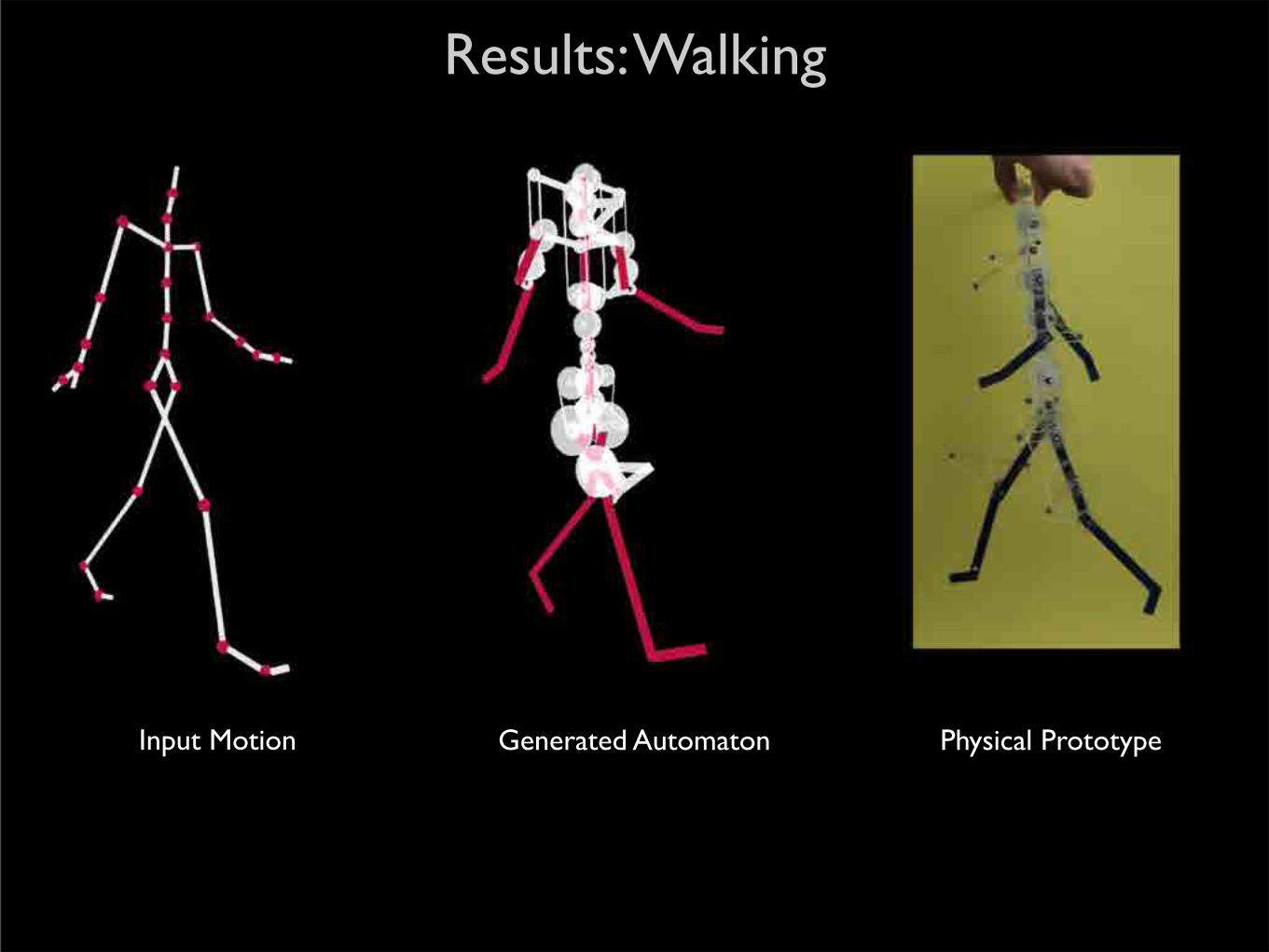
Results: Walking
Input Motion Generated Automaton Physical Prototype
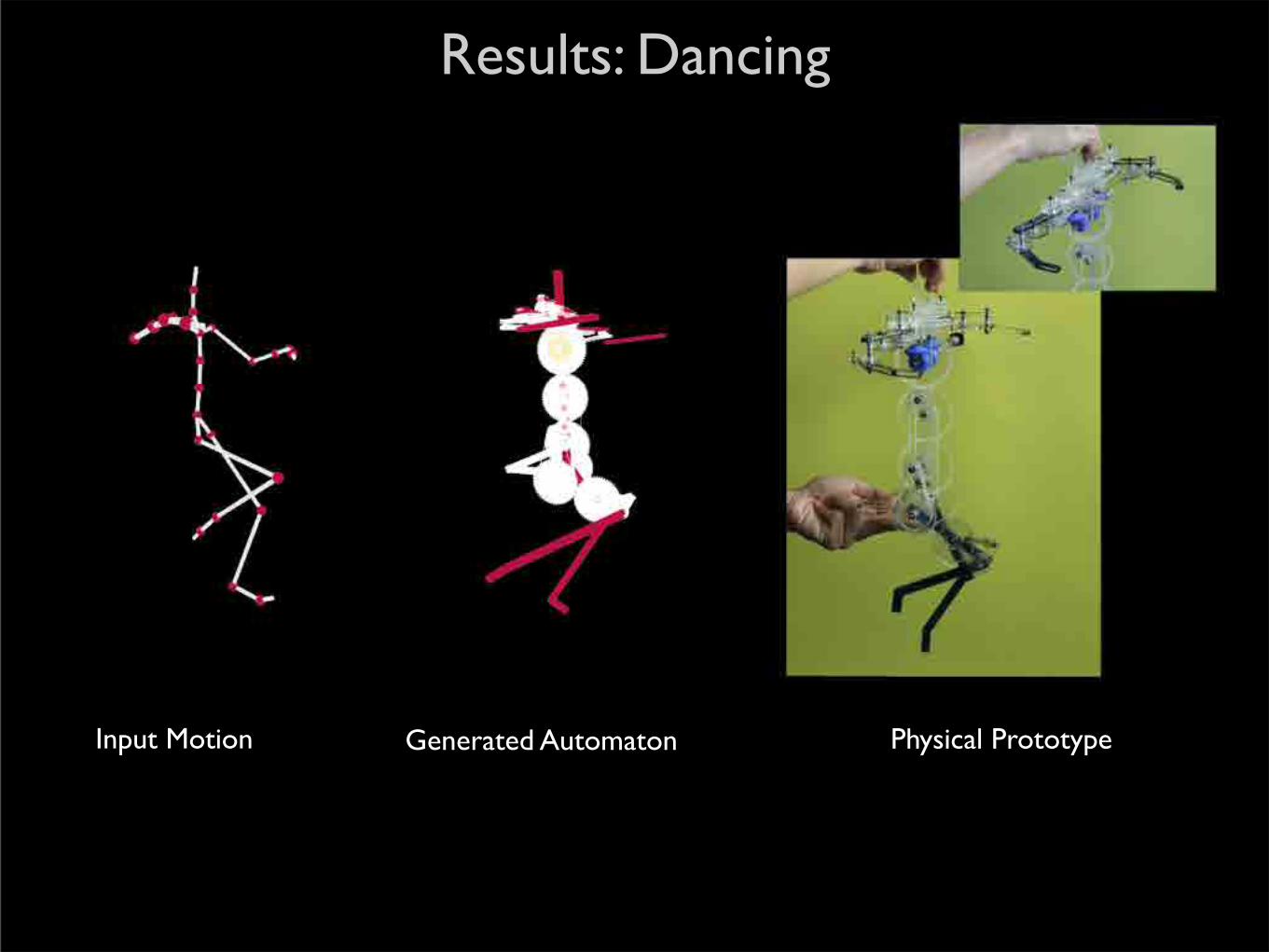
Results: Dancing
Input Motion Generated Automaton Physical Prototype
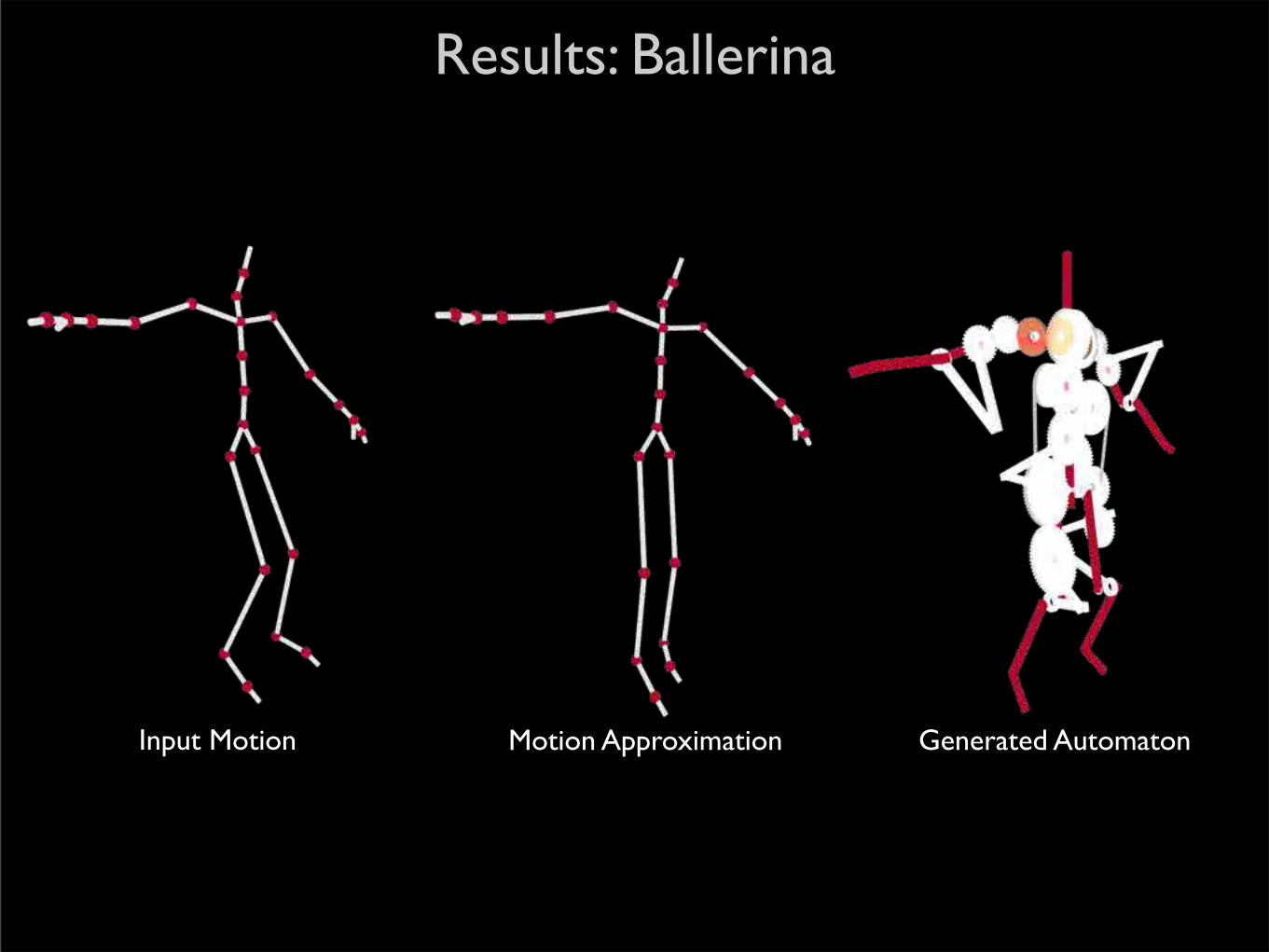
Input Motion Motion Approximation Generated Automaton
Results: Ballerina
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
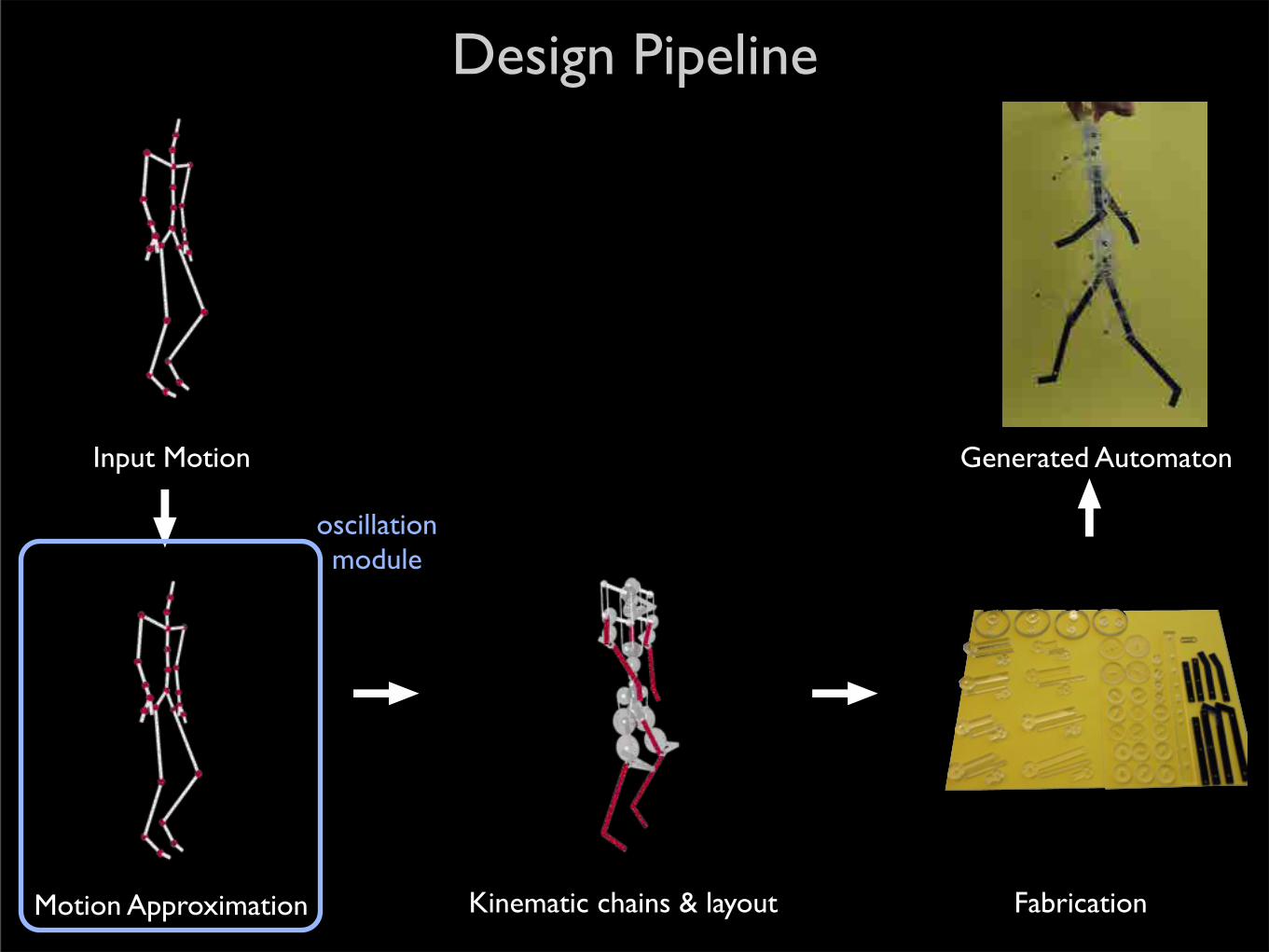
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
oscillationmodule
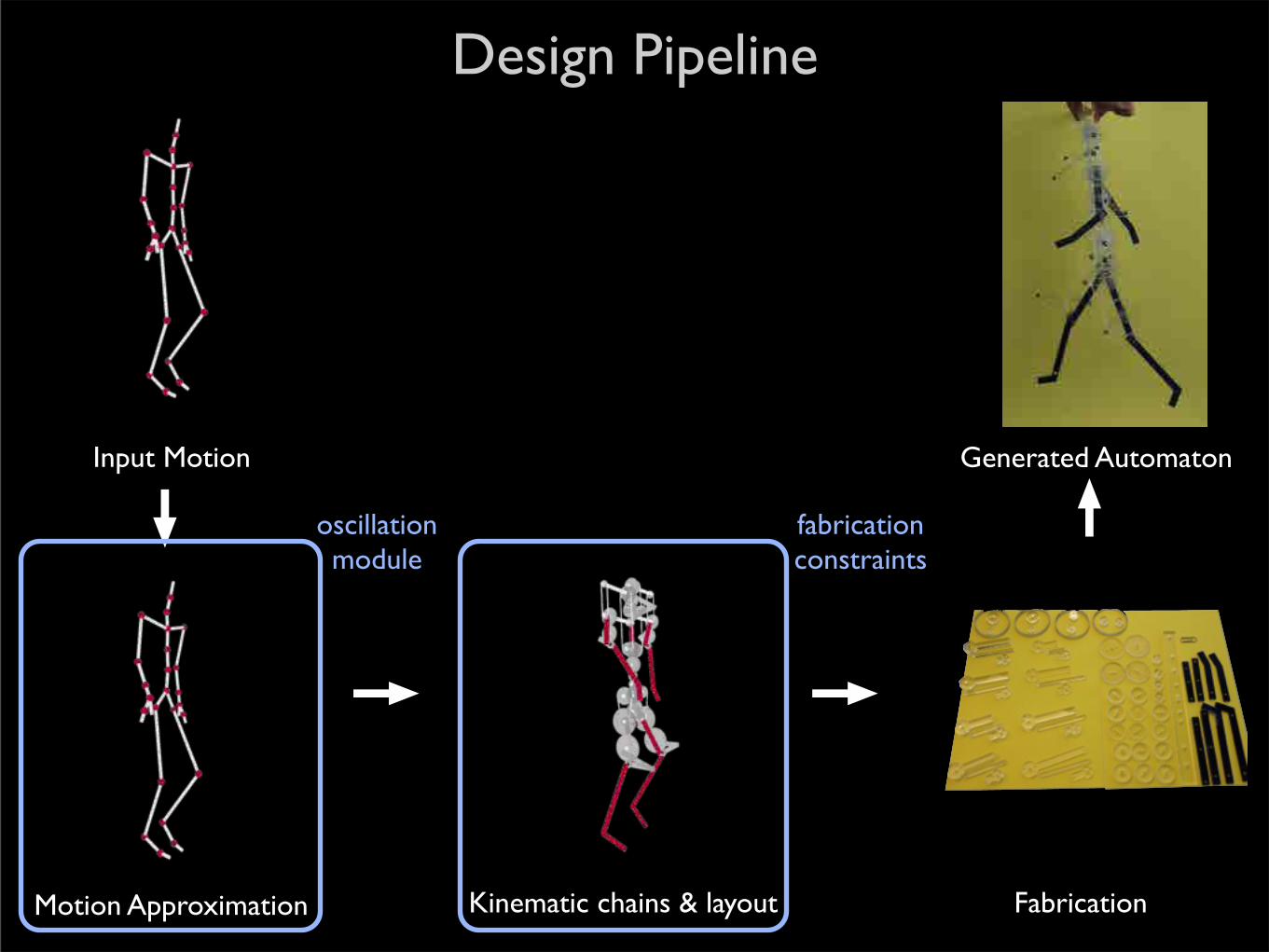
Design Pipeline
Input Motion Generated Automaton
Motion Approximation Kinematic chains & layout Fabrication
oscillationmodule
fabricationconstraints
Limitations
‣ planar approximation
Limitations
‣ planar approximation
‣ simple planar mechanisms
‣ single input crank

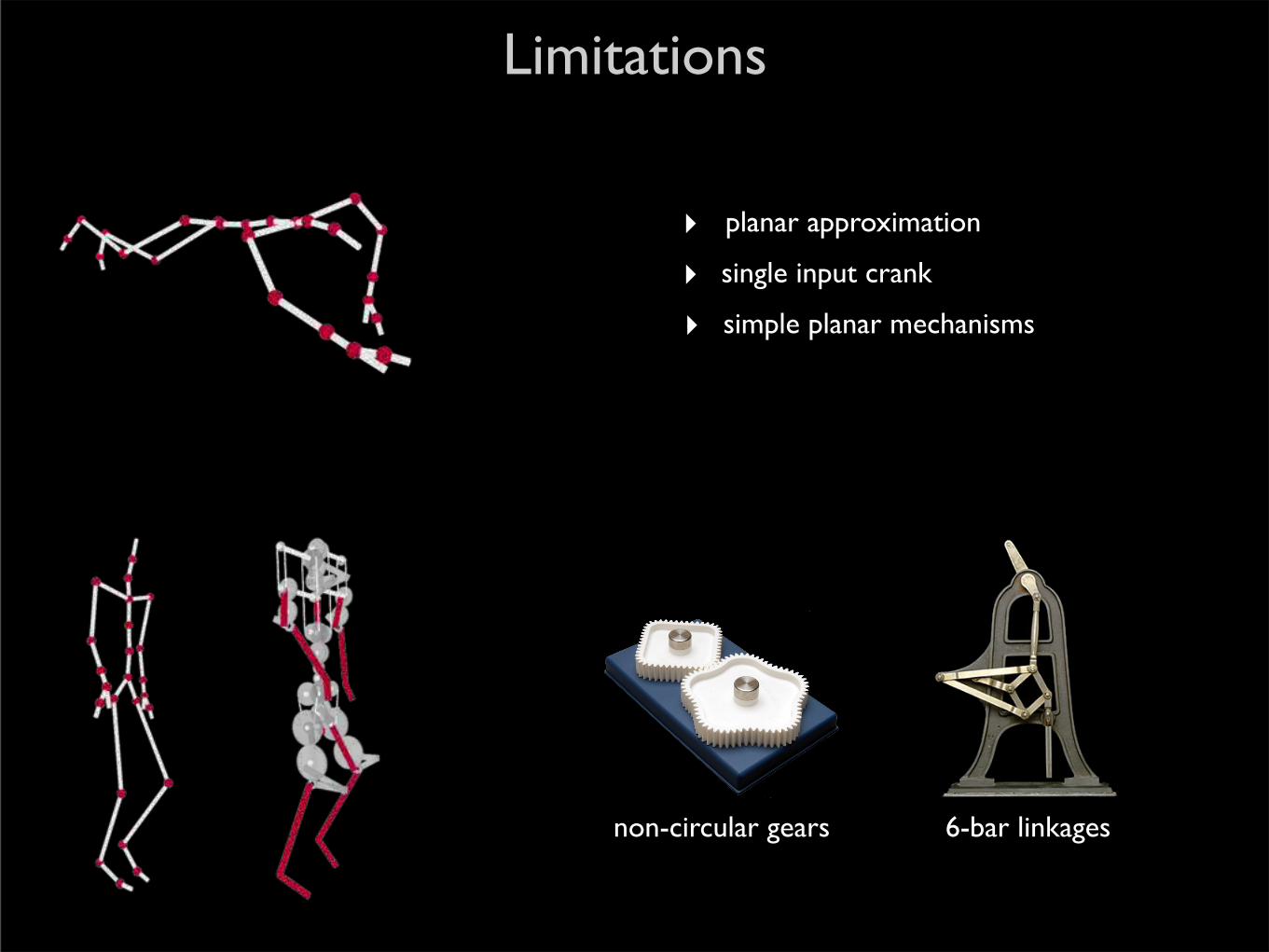
Limitations
‣ planar approximation
‣ simple planar mechanisms
‣ single input crank
Limitations
‣ planar approximation
‣ simple planar mechanisms
‣ single input crank
non-circular gears 6-bar linkages
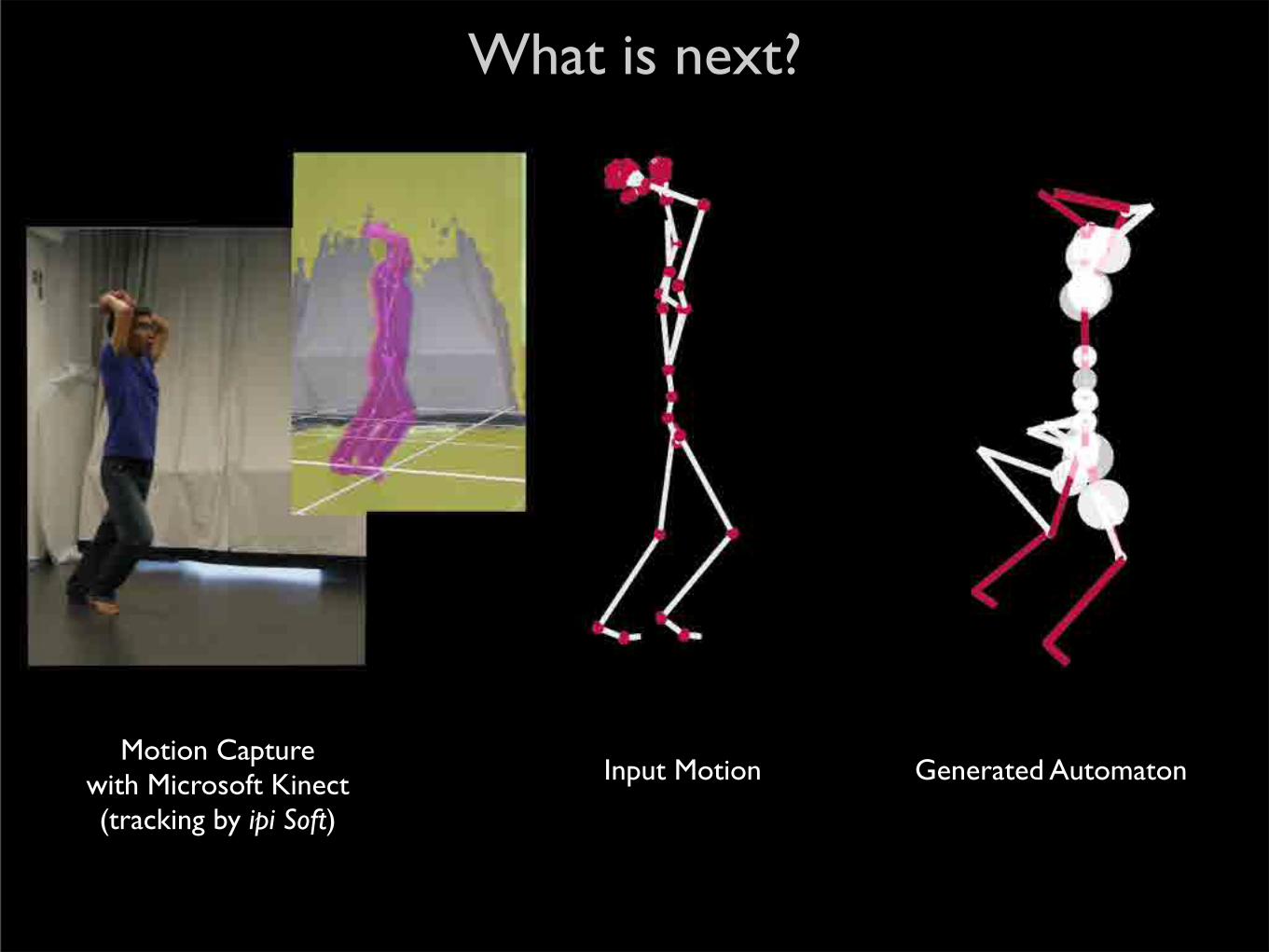
Motion Capturewith Microsoft Kinect(tracking by ipi Soft)
Input Motion Generated Automaton
What is next?
What is next?
self-standing automata other mechanisms
Acknowledgements
Zohreh Sasanian
Minh Dang
Nobuyuki Umetani
Tina J. Simith
EPFL ENAC Output Center
ERC Starting Grant 257453 COSYM
Marie Curie Career Integration Grant
Adobe Research Grant
UCL Impact Award
Thank you...
http://www.duygu-ceylan.com/duygu-ceylan/mechAuto.html