Design of a Permanent-Magnet Synchronous Generator for …ijeee.iust.ac.ir/article-1-662-en.pdf ·...
9
52 Iranian Journal of Electrical & Electronic Engineering, Vol. 11, No. 1, March 2015 Design of a Permanent-Magnet Synchronous Generator for a 2 MW Gearless Horizontal-Axis Wind Turbine According to its Capability Curves A. Darijani*, A. Kiyoumarsi* (C.A.) , B. Mirzaeian Dehkordi*, H. A. Lari*, S. Bekhrad* and S. Rahimi Monjezi* Abstract: Permanent-Magnet Synchronous Generators (PMSGs) exhibit high efficiency and power density, and have already been employed in gearless wind turbines. In the gearless wind turbines, due to the removal of the gearbox, the cogging torque is an important issue. Therefore, in this paper, at first, design of a Permanent-Magnet Synchronous Generator for a 2MW gearless horizontal-axis wind turbine, according to torque-speed and capability curves, is presented. For estimation of cogging torque in PMSGs, an analytical method is used. Performance and accuracy of this method is compared with the results of Finite Element Method (FEM). Considering the effect of dominant design parameters, cogging torque is efficiently reduced. Keywords: Cogging Torque, Magnetic Equivalent Voltage, Permanent-Magnet Synchronous Generator, Power Coefficient. 1 Introduction1 Energy crisis and environmental pollution caused by fossil fuel, have led many countries to make effective use of wind energy for electric power generation. The horizontal-axis wind turbines-due to great heights from the ground level-are good variants to generate electricity at high power levels [1]. Generators used in wind turbines are divided into two types of constant-speed and variable-speed. Until the late 1990s, most wind turbines were built for constant-speed applications. The power level in these generators is below 1.5 MW and a multi-stage gearbox-to maintain a constant speed-is often used. Nowadays most wind turbine manufacturers are building variable-speed wind turbines for power levels from approximately 1.5 to 5 MW [2]. Recently, PMSGs, due to high-efficiency and power density, have been greatly considered to produce electric power at different levels [3]. In wind turbines, in order to increase rotational speed of the shaft, gearboxes are used. But due to mechanical, repairing and noise problems, they are now removed and so called direct-drive generators are announced [4]. In this case, in order to compensate the lack of high Iranian Journal of Electrical & Electronic Engineering, 2015. Paper first received 22 Dec. 2013 and in revised form 26 Oct. 2014. * The Authors are with the Department of Electrical Engineering, Faculty of Engineering, University of Isfahan, Isfahan, Iran. E-mail: [email protected]. rotational speed of the rotor, by removing the gearbox, the number of poles in generator should be increased. One of the disadvantages of the direct-driven generators is the cogging torque that is the main part of the torque pulsations. The cogging torque is the interaction between the Permanent-Magnets (PMs) and the stator slots [5]. Due to the direct connection of the wind turbine and generator shaft, torque pulsation has an important concern and has direct impact on the efficient use of the wind power. Therefore less torque ripple, developed by the system, reduces the mechanical stress and lowers the maintenance cost. The cogging torque calculation is discussed in many technical papers. In [6], neglecting the motor’s curvature, an analytical method is used for this purpose. In [7-8] an analytical method is used to optimize small motors; however, it has not a suitable prediction in large machines. Five different methods for calculating the cogging torque is comprised in [9]. In this paper, according to the speed-torque and capability curves, the area of operations to generate constant power for the generator is selected. The generator design is done in this interval, then, using an analytical method, the generator cogging torque is predicted and the results are compared with FEM. With considering the effect of design parameters, cogging torque is reduced considerably. Downloaded from ijeee.iust.ac.ir at 21:33 IRDT on Wednesday July 4th 2018 [ DOI: 10.22068/IJEEE.11.1.52 ]
Transcript of Design of a Permanent-Magnet Synchronous Generator for …ijeee.iust.ac.ir/article-1-662-en.pdf ·...

52 Iranian Journal of Electrical & Electronic Engineering, Vol. 11, No. 1, March 2015
Design of a Permanent-Magnet Synchronous Generator for a 2 MW Gearless Horizontal-Axis Wind Turbine According to its Capability Curves A. Darijani*, A. Kiyoumarsi*(C.A.), B. Mirzaeian Dehkordi*, H. A. Lari*, S. Bekhrad* and S. Rahimi Monjezi*
Abstract: Permanent-Magnet Synchronous Generators (PMSGs) exhibit high efficiency and power density, and have already been employed in gearless wind turbines. In the gearless wind turbines, due to the removal of the gearbox, the cogging torque is an important issue. Therefore, in this paper, at first, design of a Permanent-Magnet Synchronous Generator for a 2MW gearless horizontal-axis wind turbine, according to torque-speed and capability curves, is presented. For estimation of cogging torque in PMSGs, an analytical method is used. Performance and accuracy of this method is compared with the results of Finite Element Method (FEM). Considering the effect of dominant design parameters, cogging torque is efficiently reduced. Keywords: Cogging Torque, Magnetic Equivalent Voltage, Permanent-Magnet Synchronous Generator, Power Coefficient.
1 Introduction1 Energy crisis and environmental pollution caused by fossil fuel, have led many countries to make effective use of wind energy for electric power generation. The horizontal-axis wind turbines-due to great heights from the ground level-are good variants to generate electricity at high power levels [1].
Generators used in wind turbines are divided into two types of constant-speed and variable-speed. Until the late 1990s, most wind turbines were built for constant-speed applications. The power level in these generators is below 1.5 MW and a multi-stage gearbox-to maintain a constant speed-is often used. Nowadays most wind turbine manufacturers are building variable-speed wind turbines for power levels from approximately 1.5 to 5 MW [2]. Recently, PMSGs, due to high-efficiency and power density, have been greatly considered to produce electric power at different levels [3].
In wind turbines, in order to increase rotational speed of the shaft, gearboxes are used. But due to mechanical, repairing and noise problems, they are now removed and so called direct-drive generators are announced [4]. In this case, in order to compensate the lack of high
Iranian Journal of Electrical & Electronic Engineering, 2015. Paper first received 22 Dec. 2013 and in revised form 26 Oct. 2014. * The Authors are with the Department of Electrical Engineering, Faculty of Engineering, University of Isfahan, Isfahan, Iran. E-mail: [email protected].
rotational speed of the rotor, by removing the gearbox, the number of poles in generator should be increased.
One of the disadvantages of the direct-driven generators is the cogging torque that is the main part of the torque pulsations. The cogging torque is the interaction between the Permanent-Magnets (PMs) and the stator slots [5]. Due to the direct connection of the wind turbine and generator shaft, torque pulsation has an important concern and has direct impact on the efficient use of the wind power. Therefore less torque ripple, developed by the system, reduces the mechanical stress and lowers the maintenance cost. The cogging torque calculation is discussed in many technical papers. In [6], neglecting the motor’s curvature, an analytical method is used for this purpose. In [7-8] an analytical method is used to optimize small motors; however, it has not a suitable prediction in large machines. Five different methods for calculating the cogging torque is comprised in [9].
In this paper, according to the speed-torque and capability curves, the area of operations to generate constant power for the generator is selected. The generator design is done in this interval, then, using an analytical method, the generator cogging torque is predicted and the results are compared with FEM. With considering the effect of design parameters, cogging torque is reduced considerably.
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

Darijani et a
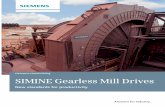
Fig. 1 Capabil 2 Wind Tu
In wind Ratio (TSR) the behavior (Cp), is definpower contafollows [10]:
∞
=R
Vωλ
where R is thV∞ is wind sp
The grapha very impoenergy conveof the turbine
β is the pchord axis an
The windthe generatoMechanical tturbine is exp
5
3
12
= PRT C π ωλ
The mainshowed in TaTurbine’s tor Table 1 The m
P
Rated
Rotor
C
Cu
Rotatio
al: Design of a
lity curve.
urbine turbine, poware two relevof the wind t
ned as power oained in the w
he turbine radpeed. h of the powerortant measurersion. Fig. 1 ie for different pitch angle whnd the rotor plad power is traor and is contorque transmpressed as [11
2ω
n specificationable 1. Accordrque can be ca
main characterisarameters
d Power (kW)
r Diameter (m)
Cut-in (m/s)
ut-out (m/s)
onal Speed (rpm
a Permanent-M
wer coefficientvant definitionturbine. The poutput from thwind and TS
dius, ω is rota
r coefficient are in characteillustrates the β.
hich is a meaane. ansmitted thronverted into
mitted by the s]:
ns of 2 MW ding to Table alculated.
stics of the windV
2
m) [7.8-23
Magnet Synch
t and Tip Spns which descrpower coeffic
he wind turbinSR is defined
ational speed
against the TSRerizing the wcapability cur
asure between
ough the shafelectrical powshaft of the w
wind turbine 1 and Eq. (2),
d turbine. Value
2050
92.5
3
25
3]+/-12.5%
hronous Gener
peed ribe ient e to
d as
(1)
and
R is wind rves
the
ft to wer.
wind
(2)
are the
gen
=T
thethe
maopecon
thetorturwosys
( dd
whtor
powcurnegFigillu
thegenma 3
areslo
Figcur
rator for a 2 M
The torque nerator system
( = +L mdT Jdt
ω
In which TL ie shaft of turbe equivalent da
Generator daximum poweeration. In thinsidered zero.In order to a
e steady-staterque to speed rbine’s torqueords, the stabstem (WECS)
)− >L
m m
dT dTd dω ω
here TL is therque; and ωm is
As it is undewer transmissrves that the gative and theg. 2 the torquustrated.
As can be see transmissionnerator is in aximum torque
Design of thThe low-car
e used in the ots have semi-c
g 2. The turbinrves.
MW Gearless
transmissionm is considered
) +m mDω
is the generatobine, generatoamping factoresign should er output of tis case, the va
achieve the eqoperation, thshould be gre
e with respecility of wholeis satisfied wh
0>
e generator’s s the mechani
erstandable frosion can occuslope of the
e generator’s tue curves of
een from Fig. n of power
the speeds e.
he Electrical Grbon steel and
rotor and staclosed shapes
ne and generato
…
n equation ind as follows [1
or torque; J isor and the blar.
take place bthe turbine inariation of spe
quilibrium in the variations oeater than thect to the spee wind energhenever:
torque; T is cal rotational
om the above ur in an area turbine’s tortorque curve igenerator an
2, the operatfrom the tu
higher than
Generator d silicon-steeator of PMSG.
or’s torque vers
53
n a turbine-10]:
(3)
s the inertia ofdes; and D is
based on then steady-stateeed should be
the system forof generator’se variations ofeed. In othergy conversion
(4)
the turbine’sspeed. equations, theof the torquerque curve isis positive. In
nd turbine are
tional area forurbine to thethe speed of
el laminationsGs. The stator
sus rotor speed
-
f s
e e e
r s f r n
)
s
e e s n e
r e f
s r
d
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

54 Iranian Journal of Electrical & Electronic Engineering, Vol. 11, No. 1, March 2015
The magnets are providing the air-gap flux density to generate power and are mounted on the exterior surface of the rotor. Among the two rare-earth permanent-magnets (NdFeB, SmCo), the NdFeB is preferred; for it is cheaper and is already more available [12]. The primary parameters that affect a PM machine’s dimensions are the air-gap length and the magnet height. In [13], based on analytical and practical process, different methods for estimating the proper air-gap length are presented. These two parameters play a major role in determining the air-gap magnetic field, the air-gap flux density and the induced voltage in the machine.
3.1 Airgap Flux Density Airgap flux density is determined according to
saturation level of the stator. If the air-gap flux density is high enough to saturate the stator’s core material, it will reduce the machine’s performance. Therefore a balance must be established between magnetic circuit saturation and power absorption capability. For the considered generators, the flux density in the airgap considered as 0.8 T. The fundamental component of the airgap flux density distribution is determined according to [14]:
1
4 sin2
⎛ ⎞⎜ ⎟⎝ ⎠=
pm
peak maxB B
πα
π (5)
where αpm is the pole-arc to pole-pitch ratio and Bmax is the maximum air-gap flux density.
3.2 Main Dimensions of the Generator The first step to obtain the dimensions of the
permanent-magnet surface-mounted generator is to choose appropriate tangential stress (σFtan). The tangential stress is a factor that produces torque in these machines. The tangential stress depends on linear current density and flux density. The torque equation is expressed as [14]:
2/
tan 2= r
FDT lσ π
(6)
The diameter-to-length ratio in the generator is described as:
/ =rDl
χ
(7)
where Dr is the rotor diameter and /l is the rotor equivalent length.
3.3 Stator and Rotor Yokes Stator and rotor yokes provide a path for the flux to
be circulated in the machine. The height of the stator and rotor yokes depends on the saturation level of the core. The efficiency of the machine can be deteriorated by choosing the yoke very small, on the other hand, the yoke cannot be selected over a specific size due to the machine’s oversize. By selecting the maximum valid
value for the flux density, the height of the stator and rotor yokes can be calculated as follows:
2 ( )=
−m
yrFe v v yr
hk l nb B
φ
(8)
2 ( )=
−m
ysFe v v ys
hk l n b B
φ
(9)
In which mφ is magnetic flux, Βyr is rotor yoke flux density, Βys is stator yoke flux density, bν is width of the ventilation ducts, nν is number of the ventilation ducts and kfe is the space factor for lamination.
3.4 Equivalent Magnetic Voltage Pass of magnetic flux into different parts of machine
causes an equivalent magnetic voltage drop to be created, that is called magnetic voltage. The magnetic voltage in different parts of the machine depends on the magnetic resistance (reluctance) of that part. The main relation of the magnetic voltage in magnetic circuits is as follows:
= ∫ml
U Hdl
(10)
where H is the magnetic field and l is the path’s length. The airgap has the highest magnetic voltage drop in
the machine due to high magnetic resistance in the region. This can be defined as follows:
max
0
.m e eBU δ δμ
=
(11)
where μ0 is the permeability of air and δe is the effective air-gap.
The product of the magnetic field strength of the stator teeth and its height results in teeth’s magnetic voltage, which is defined as:
.=md d dU H h (12)
Because of the nonlinearity between magnetic flux density and magnetic field strength, it results in nonlinear magnetic voltage in stator and rotor yoke, as for a coefficient c is used to determine the influence of the maximum flux density in the yoke. The magnetic voltages are as follows:
=mys s ys ysU c H τ (13)
=myr r yr yrU c H τ (14)
In which yH is the field strengths corresponding to
the highest flux density and τy is the length of the pole-pitch in the middle of the yoke.
3.5 Magnets Dimensions The produced magnetic voltage in all parts of the
machine is resulted from the flux of the magnets. In other words it is the magnet’s flux that produces the
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

Darijani et al: Design of a Permanent-Magnet Synchronous Generator for a 2 MW Gearless … 55
magnetic voltage. An approximation to calculate this parameter is as:
=mtot c PMU H h (15)
With the expansion of the above relations, permanent-magnet height is calculated as follows:
max
max
.( )2 4
.2
−+ + +
=− +
mys r y r r yrm e mds
PMr y rc
c PMr
U c H D hU U
ph c HHH BB p
δ
π
π
(16)
3.6 Winding Factor
Generator’s windings are distributed on the stator-inner surface to produce a sinusoidal voltage. Thus, the flux, penetrating the winding, does not intersect all windings simultaneously, and there is a certain time difference in the flux passing through the windings. This phenomenon in the induced voltage is defined by a coefficient which is called distribution factor. The Electromotive Force (EMF) in the machine depends on the number of winding turns in addition to the winding factor that is dependent to each harmonic and air-gap flux. The EMF is defined as:
( ) =pm n s n wnE k Nω φ (17)
where ωs is the synchronous rotational speed; nφ is the magnetic flux; kwn is the winding factor; and N is the number of turns per path.
The winding factor consists of distribution factor, pitch factor and skewing factor. The relation of the winding factor is defined as follows [15]:
2 sin( . ) sin( ) sin[ .( )]2 2. 2
( )sin( . . ). ( )
2
=
sqp
pw
sq
p
snn w vm
K n Spq n nQ
τπ π π
τππ
τ
(18)
where m, is the number of phases; wτp is a constant coefficient equal to 0.83; Ssq, is the pitch of pole-pair; q, is the number of slots per pole per phase; and, τp, is the pole-pitch.
The values of the winding factor harmonics for this generator are illustrated in Fig. 3.
Fig. 3 Winding factor harmonics for q=1.6.
3.7 Magnetizing Inductances Due to similar values of permeability for air and
permanent-magnet, the d- and q-axis inductances in PMSG have approximately the same values. The magnetizing inductance for an m-phase PMSM with distributed winding is defined as:
/ 20
2 1 4. ( (1) )2 2.
= = pmd mq w
ef
mL L l k Np
τμ
π π δ (19)
The d- and q-axis inductances are obtained from the leakage and magnetizing inductances. The leakage inductances in the electrical machines include the air-gap leakage inductance, slot leakage inductance, tooth tip leakage inductance, and end-winding leakage inductance [14].
3.8 The Losses of the Generator The losses in PMSM can be divided into several
categories which are: stator Joules losses, mechanical losses, stray losses and iron losses. The iron losses are approximately proportional to the square of the yoke flux density and mass of the yoke. In addition, iron loss depends on the electrical frequency of the generator. The maximum frequency is proportional to the rotational speed so that increasing the rotational speed, causes the iron loss to be increased. An approximation to calculate the iron losses is as:
322
15 1.5 50ys or yr
Feys or Feyr Fey ys or yr
B fP k P m⎛ ⎞ ⎛ ⎞= ⎜ ⎟ ⎜ ⎟
⎝ ⎠⎝ ⎠(20)
where f is the frequency, kFey is the correction factor, my is the mass of yokes, By is the yoke magnetic flux density and P15 is the loss correction factor.
3.9 The Torque-Load Angle Representation The graph of the torque against the load angle is very
important in characterizing the electrical machine. Whenever the inductances and electromotive forces are known, the torque relation with respect to load angle can be predicted. The torque equation against the load angle in the PMSMs is expressed as [16]:
2
.. sin⎡ ⎤
= ⎢ ⎥+⎣ ⎦
pme
s md s
E Um pTL L σ
δω
(21)
where Lsσ is the total leakage inductance and δ is the load angle.
Due to expected Ld=Lq, the maximum torque is achieved with load angle equal to 90° . Fig. 4 shows the torque curve plotted for this designed generator for a 288-slot- and 60-pole combination.
In Fig. 4 the dashed line is achieved from Eq. (21) results, and the continuous curve is obtained from the FEM results. In Eq. (21) the d- and q-axis inductances are considered the same, but in the FEM, these values are closer to their actual values, thus there are a bit different with comparison to the values obtained from Eq. (21). Due to this, a slight difference can be seen in the curves.
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

56
Fig. 4 Electric Table 2 Electr
Quadrature
Direct axis
Direct axis
Quadrature
Line voltag
Synchrono
Rotor spee
Table 3 Dime
Number of poNumber of slThe outer dia(mm) The outer diaEffective lengStator and rot
Magnet thickAir-gap lengt
4 FEM An
The 2 characteristicTables 2 and
The finitepreliminary performance work methodstepping finitno-load (co
cal torque versus
rical characterisName
e axis voltage (V
s voltage (V)
s current (A)
e axis current (A
ge (V)
us inductance (
d (rpm)
ensional charactName
oles ots
ameter of the sta
ameter of the rotgth (mm) tor yoke height
kness (mm) th (mm)
nalysis MW PMSG
cs and importa3.
e element medesign in
of the generad for calculate element sim
ogging torque
Iran
s load angle.
stics of the geneParam
V) rqsv rdsv
dsI
A) qsI
LLV(mH)
dL =
N
teristics of the dPar
ator
tor (mm)
(mm)
G was desigant dimension
ethod was useorder to
ator. The softwation of the tmulation, torque) and full-
nian Journal o
erator. meter Value
s548.5
s357.3
s1465.32
s1225.21
L 660
qL 0.712
22
designed generaameter Valu2.p 60Q 288
seD 3890
rD 3470/l 1293
yrh 730
PMh 25g 6
gned and ms are presented
ed to analysis investigate
ware uses virttorque. By timue is compute-load (with
of Electrical &
2
1
ator. ue
8 0
0 3
0
main d in
the the
tual me-d at the
exigenlinsitutheEMFig
conFigof betwintorsalvar
intmadef
Fig
Fig
& Electronic E
istence of thnerator prototyes at the full-uation, the mae stator teeth.MF voltages og. 6.
The output tnstant wind sg. 7. The electhree parts. T
tween the fielndings. The orques. The reliency of thriations. The cogging
eraction betwagnets and thfined as the su
g. 5 Magnetic fl
g. 6 Generator E
Engineering, V
he stator currype topology -load conditioaximum magnThe phase-to
of the designe
torque of the speed in its opctromagnetic tThe main parld of the magother parts areluctance torq
he rotor and
g torque in PMween the mahe stator slotsum of the rippl
ux lines in full-
EMF phase volta
Vol. 11, No. 1
rents). Fig. and magnetic
on. As can benetic flux deno-ground waveed generator
generator foptimum valuetorque in a PMrt is the intergnets and thatre ripple andque is develd the air-ga
MSG is deveagnetic field s. The torquele and the cog
-load condition.
ages.
, March 2015
5 shows the equipotentiale seen in this
nsity occurs ineforms of theare shown in
or a period ofe is shown inMSM consistsractive torquet of the statord the coggingloped by theap reluctance
eloped by theof the rotor
e pulsation isgging torque.
5
e l s n e n
f n s e r g e e
e r s
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

Darijani et a
Fig. 7 Shaft to 5 Cogging
In wind generator, reIn other wordresult in redefficiency ofthe inherent cmore from wtorque comptorque is creaair-gap when
In this seenergy convcogging torqbased on enethe following
• Negle• Consi• Consi
mode• Consi
modeBy calcu
energy withmagnets, the
( ) aicog
WT a
a∂
=∂
where a is thmagnetic eneinside circumrelative permdensity. The
1
( )
⎧⎪⎪⎪⎪= ⎨⎪ +⎪⎪⎪⎩
pm
r
G h
θ
θ
μ
al: Design of a
orque variations
Torque turbines redusults in an opds less torque ducing the mf the system. characteristics
wind energy, iponent as muated due to then a magnet pasection an analyversion in air-que. This methergy conversiog assumptions ecting the eneridering the leaidering the intl. idering the ls.
ulating the deh respect to
cogging torqu
0
1irgap
va a μ⎡∂
= ⎢∂ ⎣∫
he position anergy in the airmference of tmeance, and air-gap relativ
[ 0/ , /
[ (
∈ − −
+
− + +
m
r
s s
Q bh g
g R R
θ π
μπ
a Permanent-M
versus time.
ucing the torqtimized usagepulsation in t
mechanical stThe cogging
s of PMSGs. Iit is necessaryuch as possibe variations in sses through thytical method-gap is used hod is accuraton method [9]are considere
rgy variationsakage flux in ster-pole magn
curvature in
erivative of tthe rotationa
ue is obtained 2 2
0
1 ( ) (G Bθ θμ
ngle of the ror-gap, θ, is thethe stator, G(
B(θ,a) is tve permeance
] [
[
0
0
0 0
2 / 2, /
)cos( )]2 2
/ 2, / 2
∪
−
∈ −
s
b Q
gC
R b
b b
φ
π
π θ
θ
Magnet Synch
que pulsationse of wind enerthe generator wtress and higtorque is onen order to ben
y to decrease ble. The cogg
the energy inhe slot openingd that is based
to calculatete enough and]. In this methed: in the core. stator slots.
net leakage in
n PM and
the air-gap fal angle ofas follows:
, )a dVθ⎤⎥⎦
(
tor, Wairgap is e angle along (θ) is the air-the air-gap fis as follows []
]
]
2
Q
Cφ
(
hronous Gener
s in rgy. will gher e of nefit this
ging n the gs.
d on the
d is hod,
PM
slot
field the
(22)
the the
-gap flux [9]:
(23)
whrec
Cφ
aG
aB
ma
(B
μ
⎧⎪⎪⎪⎨⎪⎪⎪⎩ 5.1
andandbot
airggre
Figme
rator for a 2 M
here b0 is the coil permeabil
2
2 /− −
=−
pR g hR gφ
The values fo
0
0
/2
/
/−
= ∫nNL
b
ab
Q π
/
0
2= ∫
p
nNL
N
ap B
π
π
The airgap fachine and is d
1,3,5
4( )
( 1) 22
1 1
i r
r r
r s
p
ip
RR
θμ
μμ
∞
=
=
− +
⎡ ⎛− ⎢ − ⎜⎢ ⎝⎣
∑
1 Comparingan
In this sectiod cogging tord finite elemeth methods areFrom Fig. 8,
gap flux deneater than that
g. 8 Comparisontioned method
MW Gearless
slot openingity and Cφ is c
/ 2/ 2pm
for
nNLaB and G2
2
2
( ) cos(G nNθ
2 ( ) cos(B nNθ
flux density idefined as foll
12
sin( ) co2
2
1
r
ip
r
mip
r r
s r
B i a
RR
π
μμ
+⎛ ⎞ ⎛−⎜ ⎟ ⎜
⎝⎝ ⎠⎤⎞ −⎥ −⎟⎥⎠ ⎦
g the Results nd Finite Elemon the results rque obtainedent method aree shown in Fig, it can be seensity, obtaineof the analyti
on of the air-gds.
…
, μr is the maconsidered as
nNLaG are as fol
)LN θ
)LN dθ θ
in an equivalows [9]:
os( )2 (
2
12
( ) (
m
s
r
m
ipm
s
RRipip
RipR
R RR R
θ
⎛⎜⎝
⎛ ⎞⎛ ⎞+ ⎜⎟⎝ ⎠ ⎝ ⎠
⎡−⎢
⎣
of the Analytment Methodfor the air-gap
d by the analye compared. Tgs. 8 and 9, re
en that the amed from FEMical method.
gap flux densit
57
agnet relative[9]:
(24)
lows [9]:
(25)
(26)
lent slots-less
12
) 1
)
iN
ip
ipr
m
R
+⎞⎟⎠ ×−
⎫⎞ ⎪⎟ ⎪⎪⎠
⎬⎤ ⎪⎥ ⎪⎦ ⎪⎭
(27)
tical Method p flux densityytical methodThe results ofespectively.
mplitude of theM, is slightly
ty for the two
e
)
)
s
y d f
e y
o
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

58
Fig. 9 Compamentioned met
Fig. 9 sbetween the FEM. It can close to eachFigs. 8 and 9variations intangential coconsidering aand slot efacceptable prused for senstorque effecti
5.2 Sensiti
In this sversus hm, apmof the peak cin part (a). cogging torcogging torqupart (c).
The magnthe magnets cogging torqmagnets heigarises probleamplitude. Tmeanwhile ch
One of ththe machine versa. But it and mechanshould be con
Due to thcogging torqchosen to reshown in Tab
arison of the cothods.
shows the dresults from be seen that b
h other. The 9, can be expren both magnomponent of an inappropriaffects. The arediction for tsevity analysiive parameter
ivity AnalysisCoggin
ection the efm, g are invest
cogging torquePart (b) is a
rque versus ue versus mag
netic flux denheight whic
que. On the ght too muchems like reduThus, a tradhoosing this phe outcomes i
is the increashas drawback
nical limitationsidered as wehe effects of que, a new sedesign the gble 4.
Iran
gging torque ob
difference of the analyticalboth curves adifference beessed by neglnets and cor
the flux denate model for analytical methe cogging tois and optimizs.
s of Effective ng Torque
ffects of peaktigated. In Fig.e with respectssigned to illair-gap diam
gnet thickness
nsity is amplifich consequent
other hand, h, the flux deucing the Bade-off shouldparameter. n airgap diamse of total effks like cogginons. Thus agell. mentioned pa
set of paramgenerator. Thi
nian Journal o
btained by the
cogging torl method and are approximaeing seen in becting the enere, ignoring nsity and finr the flux leakethod results orque and canzation of cogg
Parameters o
k cogging tor. 10, the variatts to apm is sholustrate the pmeter and ps are illustrated
fied by increastly increases by reducing ensity drops ack-EMF voltd be conside
meter reductionficiency and vng torque grogain a trade
arameters on meters have b
s parameters
of Electrical &
two
rque the
tely both ergy
the ally
kage an
n be ging
on
rque tion own peak peak d in
sing the the and tage ered
n in vise wth -off
the been
are
Figcogpolsensen Ta
& Electronic E
g. 10 The effecgging torque. (le-arc to pole-nsitivity to air-nsitivity to thick
ble 4 ImpropveParam
ap (rad)hpm (mmg (mm)
Engineering, V
(a)
(b
(c)ct of some impo(a) The peak -pitch ratio, (b-gap length, (ckness of the ma
ed design parammeters Ini) 0.m) 3) 5
Vol. 11, No. 1
b)
ortant parametecogging torque
b) The peak cc) The peak c
agnet.
meters. itial Impro.75 0.830 255.5 6.5
, March 2015
ers on the peake sensitivity tocogging torquecogging torque
oved 8 5 5
5
k o e e
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

Darijani et a
Fig. 11 Comchanging of pa
As shownamplitude of the new impNm which is 6 Conclusi
In this pabehavior of torque-speedexemplary cuinterception intervals. Anpermanent-mThroughout parameters dimensions, discussed. This obtained bused to calccompared byapproximatelparameters arto these paramvalues for soamplitude is References [1] T. Bur
Wind 2011.
[2] H. Poland P. gearedIEEE 3, pp.
al: Design of a
mparison of thearameters in a p
n in Fig. 11, f cogging torquroved design,about 67% re
ion aper, the prina wind turb
d curves of a urve for the gwas in the
n optimum loamagnet synch
the stage ofsuch as winding fa
he torque versby two meth
culate the cogy that of thely alike. Fre studied. Thmeters is illusome of the paalso effectivel
rton, N. JenkinEnergy Hand
linder, F. F. V J. Tavner, “C
d generator cTrans. on Ene725-733, 2006
a Permanent-M
e cogging torqproper manner.
in the prelimue was nearly, this value is eduction.
nciple relationbine are discu
practical winenerator werepractical pow
ading point toronous generf designing, main dimen
actor and csus load-angleods. An analgging torque. e finite elemFinally, chanhe sensitivity ostrated. By conarameters, thely reduced.
ns, D. Sharpe dbook, John
Van der Pijl, Comparison ofconcepts for ergy Conversi6.
Magnet Synch
ques, the result
minary desing, y 6100 Nm and
reduced to 2
ns to describe ussed. Then, d turbine and
e intercepted. Twer transmisso design a 2 Mrator is chossome import
nsions, magcore losses e of the generalytical method
The results ment method,
nges in soof cogging tornsidering the ne cogging tor
and E. BossanWiley & So
G. J. De Vilf direct-drive wind turbine
ion, Vol. 21, N
hronous Gener
t of
the d in 000
the the
d an The sion MW sen. tant gnet
are ator d is are are
ome rque new rque
nyi, ons,
lder and es”, No.
[3]
[4]
[5]
[6]
[7]
[8]
[9]
[10
[11
[12
[13
[14
[15
[16
rator for a 2 M
] H. Harag“Suitable wind poCongress 2447-2452
] B. Chalmpermanenenergy sConversio
] N. Bianchfor reducmounted Applicatio2002.
] X. Wang,torque inmotors wMagnetismNo. 1, pp.
] T. Tudor“Methodsdriven PMElectrical2010 12th1166, 201
] Y. Yang, Tang, “Threduce cpermanenMagnetics
] L. Zhu, “ComparipredictingpermanenPropulsio2008.
0] S. N. BhaElectrical2005.
1] S. Erikss“Evaluatiopower”,Reviews, V
2] M. Rippy,Laminatio2004.
3] T. A. LipWisconsinUniversity
4] J. PyrhönDesign ofWiley & S
5] I. BoldeaHandbook
6] P. S. BimPerformanPublishers
MW Gearless
guchi, S. Modesign of a
wer generatand Expositio
2, 2009. mers and E. nt-magnet gensystem”, IEEon, Vol. 14, Nhi and S. Bolocing the cogPM motors”,
ons, Vol. 38
Y. Yang andn surface-mowith energym and Magn. 80-85, 2003.rache, L. Mes for cogging tM wind genl and Electroh Internationa0. X. Wang, R
he optimizatiocogging torq
nt magnet ms, Vol. 42, No
S. Jiang, ison of alterng cogging tont magnet macon Conference
adra, D. Kastl Systems, O
son, H. Beon of differenRenewable
Vol. 12, No. 5, An Overviewon Materials,
po, Introduction Power Eley of Wisconsinen, T. Jokinof Rotating ESons, 1st editioa, The Induk, CRC press, mbhra, Electnce and s, 1997.
…
orimoto and PMSG for
tor”, Energy on, ECCE 20
Spooner, “Anerator for a gEEE Trans. No. 2, pp. 251-ognani, “Desiggging torque IEEE Trans, No. 3, pp
d D. Fu, “Studunted perma
y method”, netic Material elcescu and torque reductinerators”, Oponic Equipmeal Conference
R. Zhang, T. on of pole arc que in sur
motors”, IEEEo. 4, pp. 1135-
Z. Zhu andnate analyticaorque in surchines”, Vehice, VPPC'08, IE
tha and S. BaOxford Univ
ernhoff and nt turbine conc
and Sustain5, pp. 1419-14w Guide for th, Proto Lami
on to AC Macctronics Resen, 1996. nen and V. Electrical Mon, 2008. uction Mach1st edition, 20
trical MachinApplication
59
M. Sanada,a large-scale
Conversion09, IEEE, pp.
An axial-fluxgearless wind
on Energy257, 1999. gn techniques
in surface-. on Industry. 1259-1265,
dy of cogginganent magnet
Journal ofls, Vol. 267,
M. Popescu,ion of directlyptimization ofent (OPTIM),on, pp. 1161-
Ding and R.coefficient toface-mountedE Trans. on-1138, 2006. d C. Chan,
al models forface-mounted
cle Power andEEE, pp. 1-6,
anerjee, Windversity Press,
M. Leijon,cepts for windable Energy
434, 2008. he Selection ofinations, Inc,
chine Design,earch Center,
Hrabovcová,Machine, John
hines Design009. nery: Theory,ns, Khanna
, e n .
x d y
s -y ,
g t f ,
, y f
-
. o d n
, r d d ,
d ,
, d y
f ,
, ,
, n
n
a
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]

60 Iranian Journal of Electrical & Electronic Engineering, Vol. 11, No. 1, March 2015
Ahad Darijani was born in Kerman, Iran, in 1988. He received B.Sc. degree in Electronic Engineering from University of Lorestan, Khorramabad, Iran in 2010 and M.Sc. degree in Electrical Power Engineering from University of Isfahan, Isfahan, Iran in 2013. His research interests are on designing Interior permanent-magnet
motors and generator, Linear Machines Optimization and Finite Element Method.
Arash Kiyoumarsi was born in Shahr-e-Kord, Iran, in the year 1972. He received his B.Sc. (with honors) from Petroleum University of Technology (PUT), Iran, in electronics engineering in 1995 and M.Sc. from Isfahan University of Technology (IUT), in electrical power engineering in 1998. He received Ph.D. degree from the
same university in electrical power engineering in 2004. In March 2005, he joined the faculty of University of Isfahan, Faculty of Engineering, Department of Electrical Engineering as an assistant professor of electrical machines. He was a Post-Doc. research fellow of the Alexander-von-Humboldt foundation at the Institute of Electrical Machines, Technical University of Berlin from February to October 2006 and July to August 2007. In March, 5th, 2012, he became an associate professor of electrical machines at the Department of Electrical Engineering, Faculty of Engineering, University of Isfahan. He was also a visiting professor at IEM-RWTH-Aachen, Aachen University, in July 2014. His research interests have included application of time-stepping finite element analysis and design of electromagnetic and electrical machines; and interior permanent-magnet synchronous motor-drive.
Behzad Mirzaeian Dehkordi was born in Shahrekord, Iran, in 1966. He received the B.Sc. degree in electronics engineering from Shiraz University, Shiraz, Iran, in 1985, and the M.Sc. and Ph.D. degrees in Electrical engineering from Isfahan University of Technology (IUT), Isfahan, Iran, in 1994 and 2000, respectively. From March to August
2008, he was a Visiting Professor with the Power Electronic Laboratory, Seoul National University (SNU), Seoul, Korea. His fields of interest include power electronics and drives, intelligent systems, and power quality problems.
Heidar Ali Lari was born in Sabzevar, Iran 1986. He received B.Sc. degree in electrical engineering from Birjand University, Birjand, Iran in 2011 and M.Sc. degree in electrical power engineering in University of Isfahan, Iran in 2013. Her research interest includes on application of finite element analysis and design of permanent
magnet machines.
Shahram Bekhrad received B.Sc. in Electrical Engineering from Shiraz University, Shiraz, Iran in 2010. He received M.Sc. degree in Electrical Power Engineering from University of Isfahan, Isfahan, Iran in 2013. His research interest is on electrical machine drives.
Shadman Rahimi Monjezi was born in Khuzestan, Iran, in 1984. He received M.Sc. degree in electrical power engineering (electrical machines and drives) from University of Isfahan, Isfahan, Iran, in 2012. His research activities focus on design, analysis and optimization of electromagnetic devices and electric machines and drive
systems.
Dow
nloa
ded
from
ijee
e.iu
st.a
c.ir
at 2
1:33
IRD
T o
n W
edne
sday
Jul
y 4t
h 20
18
[ D
OI:
10.2
2068
/IJE
EE
.11.
1.52
]