Design Criteria and Performance Analysis for Distributed ... · and the performance analysis of the...
13
2280 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008 Design Criteria and Performance Analysis for Distributed Space-Time Coding Karim G. Seddik, Student Member, IEEE, Ahmed K. Sadek, Student Member, IEEE, Ahmed S. Ibrahim, Student Member, IEEE, and K. J. Ray Liu, Fellow, IEEE Abstract—In this paper, the design of distributed space-time (ST) codes for wireless relay networks is considered. Distributed ST coding (DSTC) can be achieved through node cooperation to emulate a multiple-antenna transmitter. First, the decode-and- forward (DAF) protocol, in which each relay node decodes the symbols received from the source node before retransmission, is considered. An ST code designed to achieve full diversity and max- imum coding gain over multiple-input–multiple-output (MIMO) channels is proven to achieve full diversity but not necessarily maximize the coding gain if used with the DAF protocol. Next, the amplify-and-forward (AAF) protocol is considered; each relay node can only perform simple operations, such as linear transfor- mation of the received signal and amplification of the signal before retransmission. An ST code designed to achieve full diversity and maximum coding gain over MIMO channels is proven to achieve full diversity and maximum coding gain if used with the AAF protocol. Next, the design of DSTC that can mitigate the relay node synchronization errors is considered. Most of the previous works on cooperative transmission assume perfect synchroniza- tion between the relay nodes, which means that the relays’ timings, carrier frequencies, and propagation delays are identical. Perfect synchronization is difficult to achieve among randomly located relay nodes. To simplify the synchronization in the network, a diagonal structure is imposed on the ST code used. The diagonal structure of the code bypasses the perfect synchronization prob- lem by allowing only one relay node to transmit at any time slot. Hence, it is not necessary to synchronize simultaneous “in-phase” transmissions of randomly located relay nodes, which greatly simplifies the synchronization among the relay nodes. The code design criterion for distributed ST codes based on the diagonal structure is derived. This paper shows that the code design crite- rion maximizes the minimum product distance. Index Terms—Coding gain, distributed ST coding (DSTC), space-time (ST) coding, spatial diversity, wireless relay networks. I. I NTRODUCTION R ECENTLY, there has been much interest in modulation techniques to achieve transmit diversity motivated by the increased capacity of multiple-input–multiple-output (MIMO) channels [1]. To achieve transmit diversity, the transmitter needs to be equipped with more than one antenna. The an- tennas should be well separated to have uncorrelated fading Manuscript received December 19, 2006; revised June 19, 2007, September 9, 2007, and September 17, 2007. The review of this paper was coordinated by Dr. M. Dohler. K. G. Seddik, A. S. Ibrahim, and K. J. R. Liu are with the Department of Electrical and Computer Engineering, University of Maryland, College Park, MD 20742 USA (e-mail: [email protected]; [email protected]; [email protected]). A. K. Sadek is with the Corporate R&D Division, Qualcomm Inc., San Diego, CA 92121 USA (e-mail: [email protected]). Digital Object Identifier 10.1109/TVT.2007.912145 among the different antennas; hence, higher diversity orders and higher coding gains are achievable. It is affordable to equip base stations with more than one antenna, but it is difficult to equip the small mobile units with more than one antenna with uncorrelated fading. In such a case, transmit diversity can only be achieved through user cooperation, leading to what is known as cooperative diversity [2], [3]. Designing protocols that allow several single-antenna termi- nals to cooperate via forwarding each others’ data can increase system reliability by achieving spatial diversity. Another benefit results from boosting the system throughput by employing cooperation between nodes in the network. In [2] and [3], various node cooperation protocols were proposed, and outage probability analyses for these protocols were provided. The concepts of the decode-and-forward (DAF) and amplify-and- forward (AAF) protocols have been introduced in these works. Symbol error rate (SER) performance analyses for the single- node and multinode DAF cooperation protocols were provided in [4] and [5]. Performance analyses for the single-node and multinode AAF cooperation protocols can be found in [6] and [7]. In [8], Pabst emphasized the importance of studying distributed multistage relaying, in which each stage acts as a virtual antenna, and he envisioned this to be a promising di- rection to achieve the very high data rate requirements of future wireless systems. The main problem with the multinode DAF protocol [5] and the multinode AAF protocol [6], [9] is the loss in data rate as the number of relay nodes increases. The use of orthogonal subchannels for the relay node transmissions, either through time-division multiple access (TDMA) or frequency-division multiple access, results in a high loss of the system spectral efficiency. This leads to the use of what is known as distributed space-time coding (DSTC), where relay nodes are allowed to simultaneously transmit over the same channel by emulating a space-time (ST) code. The term distributed comes from the fact that the virtual multiantenna transmitter is distributed between randomly located relay nodes. The ST code design criteria for virtual antenna arrays was considered in [10], where the design of ST trellis codes was considered. It was proposed in [2] to use relay nodes to form a virtual multiantenna transmitter to achieve diversity. In addition, an outage analysis was presented for the system. Several works have considered the application of the existing ST codes in a distributed fashion for the wireless relay network [11]–[14]. All of these works have considered a two-hop relay network where a direct link between the source and destination nodes does not exist, as shown in Fig. 1. In [11], ST block 0018-9545/$25.00 © 2008 IEEE Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.
Transcript of Design Criteria and Performance Analysis for Distributed ... · and the performance analysis of the...

2280 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
Design Criteria and Performance Analysis forDistributed Space-Time Coding
Karim G. Seddik, Student Member, IEEE, Ahmed K. Sadek, Student Member, IEEE,Ahmed S. Ibrahim, Student Member, IEEE, and K. J. Ray Liu, Fellow, IEEE
Abstract—In this paper, the design of distributed space-time(ST) codes for wireless relay networks is considered. DistributedST coding (DSTC) can be achieved through node cooperation toemulate a multiple-antenna transmitter. First, the decode-and-forward (DAF) protocol, in which each relay node decodes thesymbols received from the source node before retransmission, isconsidered. An ST code designed to achieve full diversity and max-imum coding gain over multiple-input–multiple-output (MIMO)channels is proven to achieve full diversity but not necessarilymaximize the coding gain if used with the DAF protocol. Next,the amplify-and-forward (AAF) protocol is considered; each relaynode can only perform simple operations, such as linear transfor-mation of the received signal and amplification of the signal beforeretransmission. An ST code designed to achieve full diversity andmaximum coding gain over MIMO channels is proven to achievefull diversity and maximum coding gain if used with the AAFprotocol. Next, the design of DSTC that can mitigate the relaynode synchronization errors is considered. Most of the previousworks on cooperative transmission assume perfect synchroniza-tion between the relay nodes, which means that the relays’ timings,carrier frequencies, and propagation delays are identical. Perfectsynchronization is difficult to achieve among randomly locatedrelay nodes. To simplify the synchronization in the network, adiagonal structure is imposed on the ST code used. The diagonalstructure of the code bypasses the perfect synchronization prob-lem by allowing only one relay node to transmit at any time slot.Hence, it is not necessary to synchronize simultaneous “in-phase”transmissions of randomly located relay nodes, which greatlysimplifies the synchronization among the relay nodes. The codedesign criterion for distributed ST codes based on the diagonalstructure is derived. This paper shows that the code design crite-rion maximizes the minimum product distance.
Index Terms—Coding gain, distributed ST coding (DSTC),space-time (ST) coding, spatial diversity, wireless relay networks.
I. INTRODUCTION
R ECENTLY, there has been much interest in modulationtechniques to achieve transmit diversity motivated by the
increased capacity of multiple-input–multiple-output (MIMO)channels [1]. To achieve transmit diversity, the transmitterneeds to be equipped with more than one antenna. The an-tennas should be well separated to have uncorrelated fading
Manuscript received December 19, 2006; revised June 19, 2007,September 9, 2007, and September 17, 2007. The review of this paper wascoordinated by Dr. M. Dohler.
K. G. Seddik, A. S. Ibrahim, and K. J. R. Liu are with the Departmentof Electrical and Computer Engineering, University of Maryland, CollegePark, MD 20742 USA (e-mail: [email protected]; [email protected];[email protected]).
A. K. Sadek is with the Corporate R&D Division, Qualcomm Inc.,San Diego, CA 92121 USA (e-mail: [email protected]).
Digital Object Identifier 10.1109/TVT.2007.912145
among the different antennas; hence, higher diversity ordersand higher coding gains are achievable. It is affordable to equipbase stations with more than one antenna, but it is difficult toequip the small mobile units with more than one antenna withuncorrelated fading. In such a case, transmit diversity can onlybe achieved through user cooperation, leading to what is knownas cooperative diversity [2], [3].
Designing protocols that allow several single-antenna termi-nals to cooperate via forwarding each others’ data can increasesystem reliability by achieving spatial diversity. Another benefitresults from boosting the system throughput by employingcooperation between nodes in the network. In [2] and [3],various node cooperation protocols were proposed, and outageprobability analyses for these protocols were provided. Theconcepts of the decode-and-forward (DAF) and amplify-and-forward (AAF) protocols have been introduced in these works.Symbol error rate (SER) performance analyses for the single-node and multinode DAF cooperation protocols were providedin [4] and [5]. Performance analyses for the single-node andmultinode AAF cooperation protocols can be found in [6]and [7]. In [8], Pabst emphasized the importance of studyingdistributed multistage relaying, in which each stage acts as avirtual antenna, and he envisioned this to be a promising di-rection to achieve the very high data rate requirements of futurewireless systems.
The main problem with the multinode DAF protocol [5] andthe multinode AAF protocol [6], [9] is the loss in data rate asthe number of relay nodes increases. The use of orthogonalsubchannels for the relay node transmissions, either throughtime-division multiple access (TDMA) or frequency-divisionmultiple access, results in a high loss of the system spectralefficiency. This leads to the use of what is known as distributedspace-time coding (DSTC), where relay nodes are allowed tosimultaneously transmit over the same channel by emulating aspace-time (ST) code. The term distributed comes from the factthat the virtual multiantenna transmitter is distributed betweenrandomly located relay nodes. The ST code design criteria forvirtual antenna arrays was considered in [10], where the designof ST trellis codes was considered. It was proposed in [2] touse relay nodes to form a virtual multiantenna transmitter toachieve diversity. In addition, an outage analysis was presentedfor the system.
Several works have considered the application of the existingST codes in a distributed fashion for the wireless relay network[11]–[14]. All of these works have considered a two-hop relaynetwork where a direct link between the source and destinationnodes does not exist, as shown in Fig. 1. In [11], ST block
0018-9545/$25.00 © 2008 IEEE
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2281
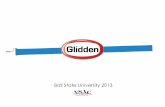
Fig. 1. Simplified system model for the two-hop distributed ST codes.
codes were used in a completely distributed fashion. Eachrelay node transmits a randomly selected column from the STcode matrix. This system achieves a diversity of order one, asthe signal-to-noise ratio (SNR) tends to infinity and is limitedby the probability of having all of the relay nodes selectingtransmission of the same column of the ST code matrix. In [12],DSTC based on the Alamouti scheme and AAF cooperationprotocol was analyzed. An expression for the average SER wasderived. In [13], a performance analysis of the gain of usingcooperation among nodes was considered, assuming that thenumber of relays that are available for cooperation is a Poissonrandom variable. The authors compared the performance ofdifferent distributed ST codes designed for the MIMO channelsunder this assumption. In [14], the performance of the lineardispersion (LD) ST codes of [15] was analyzed when usedfor DSTC in wireless relay networks. These works did notaccount for the code design criteria for the ST codes whenemployed in a distributed fashion. This paper is an answerto the question of whether an ST code, which achieves fulldiversity and maximum coding gain over MIMO channels, canalso achieve full diversity and maximum coding gain if used ina distributed fashion.
In this paper, the two-hop relay network model depicted inFig. 1, where the system lacks a direct link from the sourcenode to the destination node, is considered. The results applyto that system model, and other relaying network models mighthave different results. Every node is assumed to be equippedwith only one antenna. In the analysis, the wireless channelbetween any two nodes is assumed to be a Rayleigh flat-fadingchannel. First, DSTC in conjunction with the DAF cooperationprotocol is considered. In this scheme, the relay node forwardsthe source symbols if it has correctly decoded. Hence, not all ofthe relays assigned to help the source will forward the sourceinformation. An ST code designed to achieve full diversity andmaximum coding gain over MIMO channels will achieve fulldiversity if used with the DAF cooperation protocol. However,it will not necessarily maximize the coding gain.
The design of distributed ST codes used in conjunction withthe AAF cooperation protocol is considered. In this scheme,the relay nodes do not decode the received signals from thesource node, but they can perform simple operations to thereceived signal such as linear transformation. Each relay nodeamplifies the received signal after processing and retransmits itto the destination. In the AAF cooperation protocol, all of theassigned relay nodes for helping the source will always forward
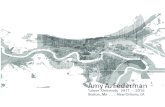
Fig. 2. Time frame structure for (a) conventional distributed ST codes and(b) DDSTCs.
the source information. An ST code designed to achieve fulldiversity and maximum coding gain over MIMO channels isproven to achieve full diversity and maximum coding gainwhen used with the AAF protocol [16].
Most of the previous works on cooperative transmissionassume perfect synchronization among the relay nodes, whichmeans that the relays’ timings, carrier frequencies, and propa-gation delays are identical. Perfect synchronization is difficultto achieve among randomly located relay nodes. Synchro-nization mismatches can result in intersymbol interference,which can highly degrade system performance. However, if thereceiver is able to estimate the synchronization mismatches,it can apply a maximum likelihood (ML) detector, and thesystem will incur a lower performance degradation. This comesat the expense of increased receiver complexity to estimatethe synchronization mismatches and increased overhead in thesystem in terms of the required training symbols.
To simplify the synchronization in the network, a diagonalstructure is imposed on the distributed ST code. The diagonalstructure of the code bypasses the perfect synchronizationproblem by allowing only one relay to transmit at any time slot(assuming TDMA). Hence, it is not necessary to synchronizesimultaneous in-phase transmissions of randomly located relaynodes, which greatly simplifies the synchronization among therelay nodes. Fig. 2 shows the time frame structure for theconventional distributed ST codes and the diagonal distributedST codes (DDSTCs). From Fig. 2, it is clear that perfect prop-agation delay synchronization and carrier frequency synchro-nization are not needed since only one relay is transmitting atany given time slot. The code design criterion for the distributedST code based on the diagonal structure is derived. It turns outthat the code design criterion maximizes the minimum productdistance of the code, which was previously used to design thediagonal algebraic ST (DAST) codes [17] and to design full-rate full-diversity space frequency (SF) codes [18], [19].
The rest of this paper is organized as follows: In Section II,the DSTC with DAF protocol system model is described,and the performance analysis of the system is provided. InSection III, the DSTC with AAF protocol system model isdescribed, and the performance analysis of the system is pro-vided. In Section IV, the code design criterion for distributed
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2282 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
ST code based on the diagonal structure is derived. InSection V, simulation results are presented. Finally, Section VIconcludes this paper.
II. DSTC WITH THE DAF PROTOCOL
In this section, the system model for DSTC with DAFcooperation protocol is presented, and a system performanceanalysis is provided. The notation x ∼ CN (m,C) is used todenote that random vector x is a circularly symmetric com-plex Gaussian random vector with mean m and covariancematrix C.
A. DSTC With the DAF Protocol System Model
The source node is assumed to have n relay nodes assignedfor cooperation. The system has two phases given as follows: Inphase 1, the source transmits data to the relay nodes with powerP1. The received signal at the kth relay is modeled as
ys,rk=√
P1hs,rks + vs,rk
, k = 1, 2, . . . , n (1)
where s is an L × 1 transmitted data vector with a powerconstraint ‖s‖2
F ≤ L, where, in turn, ‖ · ‖2F denotes the
Frobenius norm,1 and hs,rk∼ CN (0, δ2
s,rk) denotes the chan-
nel gain between the source node and the kth relay node. Thechannel gains from the source node to the relay nodes areassumed to be independent. All channel gains are fixed duringthe transmission of one data packet and can vary from onepacket to another, i.e., a block flat-fading channel model isassumed. In (1), vs,ri
∼ CN (0, NoIn) denotes additive whiteGaussian noise (AWGN), where In denotes the n × n identitymatrix.
The n relay nodes try to decode the received signals from thesource node. Each relay node is assumed to be capable of decid-ing whether it has correctly decoded. If a relay node correctlydecodes, it will forward the source data in the second phaseof the cooperation protocol; otherwise, it remains idle. Thiscan be achieved through the use of cyclic redundancy checkcodes [20]. Alternatively, this performance can be approachedby setting an SNR threshold at the relay nodes, and the relaywill only forward the source data if the received SNR is largerthan that threshold [5]. For the analysis in this section, the relaynodes are assumed to be synchronized by either a centralized ora distributed algorithm.
In phase 2, the relay nodes that have correctly decoded re-encode data vector s with a preassigned code structure. Inthe subsequent development, no specific code design will beassumed; instead, a generic ST code structure is considered.The ST code is distributed among the relays such that each relaywill emulate a single antenna in a multiple-antenna transmitter.Hence, each relay will generate a column in the correspondingST code matrix. Let Xr denote the K × n ST code matrix,with K ≥ n. Column k of Xr represents the code transmitted
1The Frobenius norm of the m × n matrix A is defined as ‖A‖2F =∑m
i=1
∑n
j=1|A(i, j)|2 = tr(AAH) = tr(AHA), where tr(·) is the trace
of a matrix, and AH is the Hermitian transpose of A.
from the kth relay node. The signal received at the destinationis given by
yd =√
P2XrDIhd + vd (2)
where
hd = [hr1,d, hr2,d, . . . , hrn,d]T
is an n × 1 channel gain vector from the n relays to thedestination, hrk,d ∼ CN (0, δ2
rk,d), and P2 is the relay nodepower where equal power allocation among the relay nodesis assumed. The channel gains from the relay nodes to thedestination node are assumed to be statistically indepen-dent, as the relays are spatially separated. The K × 1 vectorvd ∼ CN (0, NoIK) denotes AWGN at the destination node.Matrix DI is the state matrix, which will be defined later.
The state of the kth relay, i.e., whether it has correctlydecoded or not, is denoted by random variable Ik (1 ≤ k ≤ n),which takes values 1 or 0 if the relay correctly or erroneouslydecodes, respectively. Let
I = [I1, I2, . . . , In]T
denote the state vector of the relay nodes and nI denote thenumber of relay nodes that have correctly decoded correspond-ing to a certain realization I. The random variables Ik arestatistically independent, as the state of each relay dependsonly on its channel conditions to the source node, which areindependent from other relays. Matrix
DI = diag(I1, I2, . . . , In)
in (2) is defined as the state matrix of the relay nodes. Anenergy constraint is imposed on the generated ST code such that‖Xr‖2
F ≤ L, and this guarantees that the transmitted power persource symbol is less than or equal to P1 + P2.
B. DSTC With the DAF Protocol Performance Analysis
In this section, the pairwise error probability (PEP) per-formance analysis for the cooperation scheme described inSection II-A is provided. The diversity and coding gainachieved by the protocol are then analyzed.
The random variable Ik can be easily seen to be a Bernoullirandom variable. Therefore, the probability distribution of Ik isgiven by
Ik ={
0, with probability = 1 − (1 − SERk)L
1, with probability = (1 − SERk)L (3)
where SERk is the uncoded SER at the kth relay node and ismodulation dependent. For M -ary quadrature amplitude mod-ulation (M -QAM, M = 2p with p even), the exact expressioncan be shown to be upper bounded by [21]
SERk ≤ 2Nog
bP1δ2s,rk
(4)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2283
where b = 3/(M − 1), and g = (4R/π)∫ π/2
0 sin2 θdθ−(4R2/π)
∫ π/4
0 sin2 θdθ, in which R = 1 − (1/√
M).The destination is assumed to have perfect channel state
information (CSI) as well as the relay node state vector. Thedestination applies an ML receiver, which will be a minimumdistance rule. The conditional PEP is given by
Pr (X1 → X2|I,hd) = Pr(‖yd −
√P2X1DIhd‖2
F > ‖yd
−√
P2X2DIhd‖2F |I,hd,X1was transmitted
)(5)
where X1 and X2 are two possible transmitted codewords. Theconditional PEP can be expressed as a quadratic form of acomplex Gaussian random vector as
Pr (X1 → X2|I,hd) = Pr (q < 0|I,hd) (6)
where
q =[wH
1 wH2
] [ In 00 −In
] [w1
w2
]
w1 =√
P2(X1 − X2)DIhd + vd, and w2 = vd. The randomvectors hd and I are mutually independent, as they arise fromindependent processes. First, the conditional PEP was averagedover channel realizations hd. By defining the signal matrix
CI = (X1 − X2)DIdiag(δ2r1,d, δ
2r2,d, . . . , δ
2rn,d)
×DI (X1 − X2)H (7)
the conditional PEP in (6) can be tightly upper bounded by [22]
Pr (X1 → X2|I) ≤
(2∆(I)−1∆(I)−1
)N
∆(I)0
P∆(I)2
∏∆(I)i=1 λI
i
(8)
where ∆(I) is the number of nonzero eigenvalues of the signalmatrix, and the λI
i ’s are the nonzero eigenvalues of the signalmatrix corresponding to state vector I. The nonzero eigenvaluesof the signal matrix are the same as the nonzero eigenvalues ofthe matrix [23], i.e.,
Γ(X1,X2) = diag(δr1,d, δr2,d, . . . , δrn,d)DIΦ(X1,X2)
×DIdiag(δr1,d, δr2,d, . . . , δrn,d)
where
Φ(X1,X2) = (X1 − X2)H(X1 − X2).
The employed ST code is assumed to achieve full diversityand maximum coding gain over MIMO channels, which meansthat matrix Φ(X1,X2) is full rank of order n for any pair ofdistinct codewords X1 and X2. Achieving maximum codinggain means that the minimum of the products
∏ni=1 λi, where
the λi’s are the eigenvalues of matrix Φ(X1,X2), is maximizedover all the pairs of distinct codewords [24].
Clearly, if matrix Φ(X1,X2) has a rank of order n, thenmatrix Γ(X1,X2) will have a rank of order nI, which is thenumber of relays that have correctly decoded. Equation (8) cannow be rewritten as
Pr (X1 → X2|I) ≤
(2nI
−1nI−1
)NnI
0
PnI2
∏nI
i=1 λIi
. (9)
Second, the conditional PEP was averaged over the relays’ statevector I. The dependence of the expression in (9) on I appearsthrough the set of nonzero eigenvalues {λI
i}nIi=1, which depends
on the number of relays that have correctly decoded and theirrealizations. The state vector I of the relay nodes determineswhich columns from the ST code matrix are replaced with zerosand, thus, affect the resulting eigenvalues.
The probability of having a certain realization of I isgiven by
Pr(I) =
∏
k∈CR(I)
(1 − SERk)L
×
∏
k∈ER(I)
(1 − (1 − SERk)L
) (10)
where CR(I) is the set of relays that have correctly decoded,and ER(I) is the set of relays that have erroneously decoded,corresponding to the I realization. For simplicity of presenta-tion, symmetry is assumed between all relays, i.e., δ2
s,rk= δ2
s,r
and δ2rk,d = δ2
r,d for all k. Averaging over all realizations of thestates of the relays gives the PEP at high SNR as
PEP = Pr(X1 → X2) ≤n∑
k=0
((1 − SER)L
)k
×(1 − (1 − SER)L
)n−k ∑I:nI=k
(2k−1k−1
)Nk
0
P k2
∏ki=1 λI
i
(11)
where SER is now the SER at any relay node due to thesymmetry assumption.
The diversity order of a system determines the average ratewith which the error probability decays at high-enough SNR.To compute the diversity order of the system, the PEP in (11)is rewritten in terms of the SNR, which is defined as SNR =P/No, where P = P1 + P2 is the transmitted power per sourcesymbol. Let P1 = αP and P2 = (1 − α)P , where α ∈ (0, 1).Substituting these definitions, along with the SER expressionsat the relay nodes from (4), into (11) and considering high SNR,the PEP can be upper bounded as
Pr(X1 → X2) ≤ SNR−nn∑
k=0
(2Lg
bαδ2s,r
)n−k
×∑
I:nI=k
(2k−1k−1
)(1 − α)k
∏ki=1 λI
i
(12)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2284 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
where, at high SNR, 1 − (1 − SER)L ≈ L · SER and upperbounds 1 − L · SER by 1. The diversity gain is defined as d =limSNR→∞ −(log(PEP)/ log(SNR)). Applying this definitionto the PEP in (12), when the number of cooperating nodes isn, gives
dDF = limSNR→∞
− log(PEP)log(SNR)
= n. (13)
Hence, any code that is designed to achieve full diversity overMIMO channels will achieve full diversity in the distributedrelay network if it is used in conjunction with the DAF protocol.Some of these codes can be found in [15], [17], and [24]–[26].
If full diversity is achieved, the coding gain is
CDF =
n∑
k=0
(2ng
bαδ2s,r
)n−k ∑I:nI=k
(2k−1k−1
)(1 − α)k
∏ki=1 λI
i
− 1n
(14)
which is a term that does not depend on the SNR. To minimizethe PEP bound, the coding gain of the distributed ST codeneeds to be maximized. This is different from the determinantcriterion in the case of MIMO channels [24]. Hence, an STcode designed to achieve full diversity and maximum codinggain over MIMO channels will achieve full diversity but notnecessarily maximize the coding gain if used in a distributedfashion with the DAF protocol. Intuitively, the difference isdue to the fact that, in the case of distributed ST codes withDAF protocol, not all of the relays will always transmit theircorresponding code matrix columns. The design criterion usedin the case of distributed ST codes makes sure that the codinggain is significant over all sets of possible relays that havecorrectly decoded. Although it is difficult to design codes tomaximize the coding gain, as given by (14), this expressiongives insight on how to design good codes. The code designshould take into consideration the fact that not all of the relayswill always transmit in the second phase.
III. DSTC WITH THE AAF PROTOCOL
In this section, the DSTC based on the AAF protocol is in-troduced. In this case, the relay nodes do not perform any hard-decision operation on the received data vectors. The systemmodel is presented, and a performance analysis is provided.
A. DSTC With the AAF Protocol System Model
The system has two phases, which are given as follows:In phase 1, if n relays are assigned for cooperation, thesource transmits data to the relays with power P1, and thesignal received at the kth relay is as modeled in (1), withL = n. For simplicity of presentation, symmetry of the relaynodes is assumed, i.e., hs,rk
∼ CN (0, δ2s,r) ∀k, and hrk,d ∼
CN (0, δ2r,d) ∀k. In the AAF protocol, relay nodes do not decode
the received signals. Instead, the relays can only amplify thereceived signal and perform simple operations such as permu-tations of the received symbols or other forms of unitary lineartransformations. Let Ak denote the n × n unitary transforma-
tion matrix at the kth relay node. Each relay will normalize
the received signal by the factor√
(P2/n)/(P1δ2s,r + N0) to
satisfy a long-term power constraint. It can be easily shown thatthis normalization will give a transmitted power per symbol ofP = P1 + P2.
The n × 1 received data vector from the relay nodes at thedestination node can be modeled as
yd =
√P2/n
P1δ2s,r + N0
Xrhd + vd (15)
where hd = [hr1,d, hr2,d, . . . , hrn,d]T is an n × 1 vector chan-nel gain from the n relays to the destination, where hri,d ∼CN (0, δ2
r,d), Xr is the n × n code matrix given by
Xr = [hs,r1A1s, hs,r2A2s, . . . , hs,rnAns]
and vd denotes the AWGN. Each element of vd, given thechannel coefficients, has the distribution of CN (0, N0(1 +((P2/n)/(P1δ
2s,r + No))
∑ni=1 |hri,d|2)), and vd accounts for
both the noise propagated from the relay nodes and the noisegenerated at the destination. It can be easily shown that restrict-ing the linear transformations at the relay nodes to be unitarycauses the elements of vector vd, given the channel coefficients,to be mutually independent.
Now, the received vector in (15) can be rewritten as
yd =
√P2P1/n
P1δ2s,r + N0
Xrh + vd (16)
where
h = [hs,r1hr1,d, hs,r2hr2,d, . . . , hs,rnhrn,d]
T
Xr = [A1s,A2s, . . . ,Ans]
plays the role of the ST codeword.
B. DSTC With the AAF Protocol Performance Analysis
In this section, a PEP analysis is made to derive the codedesign criteria. With the ML decoder, the PEP of mistaking X1
by X2 can be upper bounded by the following Chernoff bound:
Pr(X1 → X2)
≤ E
{exp
(− P1P2/n
4N0
(P1δ2
s,r + No + P2n
n∑i=1
|hri,d|2)
× hH(X1 − X2)H(X1 − X2)h
)}(17)
where the expectation is over the channel coefficients. Tak-ing the expectation in (17) over the source-to-relay channel
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2285
coefficients, which are complex Gaussian random variables,gives
Pr(X1 → X2)
≤ E
det −1
In +
δ2s,rP1P2/n
4N0
(P1δ2
s,r + No + P2n
n∑i=1
|hri,d|2)
× (X1 − X2)H × (X1 − X2)
× diag(|hr1,d|2, |hr2,d|2, . . . , |hrn,d|2
)
(18)
where In is the n × n identity matrix.To evaluate the expectation in (18), define the matrix
M =δ2s,rP1P2/n
4N0
(P1δ2
s,r + No + P2n
n∑i=1
|hri,d|2)
×Φ(X1,X2)diag(|hr1,d|2, |hr2,d|2, . . . , |hrn,d|2
)where
Φ(X1,X2) = (X1 − X2)H(X1 − X2).
The bound in (18) can be written in terms of the eigenvalues ofM as
Pr(X1 → X2) ≤ E
{1∏n
i=1(1 + λMi)
}(19)
where λMiis the ith eigenvalue of matrix M. If P1 = αP and
P2 = (1 − α)P , where P is the power per symbol for someα ∈ (0, 1) and SNR = P/N0, the eigenvalues of M increasewith the increase in the SNR. Now, assuming that matrix M is
full rank of order n, (20), shown at the bottom of the page,holds at high SNR, where the λi’s are the eigenvalues ofmatrix Φ(X1,X2). The determinant of a matrix is equal to theproduct of the matrix eigenvalues, and the determinant of themultiplication of two matrices is equal to the product of the in-dividual matrices’ determinants.
The PEP in (19) can now be approximated at high SNR as(21), shown at the bottom of the page. Consider now the termh =
∑ni=1 |hri,d|2 in (21), which can be reasonably approxi-
mated as∑n
i=1 |hri,d|2 ≈ nδ2r,d, particularly for large n [14]
(by the strong law of large numbers). Averaging the expressionin (21) over the exponential distribution of |hri,d|2 gives (22),shown at the bottom of the next page, where Ei(.) is theexponential integral function defined as [27]
Ei(µ) =
µ∫−∞
exp(t)t
dt, µ < 0. (23)
The exponential integral function that can be approximatedas µ tends to 0 as −Ei(µ) ≈ ln(−1/µ), µ < 0 [27]. Athigh SNR (high P ), exp(−(4N0(P1δ
2s,r + No + P2δ
2r,d))/
((δ2s,rδ
2r,dP1P2/n)λi)) ≈ 1, and using the approximation for
the Ei(.) function provides the bound in (22) as
Pr(X1 → X2) ≤n∏
i=1
(δ2s,rδ
2r,dP1P2/n
)λi
4N0
(P1δ2
s,r + P2δ2r,d
)
−1
×n∏
i=1
ln
(δ2
s,rδ2r,dP1P2/n)λi
4N0
(P1δ2
s,r+P2δ2r,d
) . (24)
Let P1 = αP and P2 = (1 − α)P , where P is the power persymbol, for some α ∈ (0, 1). With the definition of the SNR as
n∏i=1
(1 + λMi) � 1 +
n∏i=1
λMi
= 1 +
δ2
s,rP1P2/n
4N0
(P1δ2
s,r + No + P2n
n∑i=1
|hri,d|2)
n
n∏i=1
λi
n∏i=1
|hri,d|2
�n∏
i=1
1 +
δ2s,rP1P2/n
4N0
(P1δ2
s,r + No + P2n
n∑i=1
|hri,d|2)λi|hri,d|2
(20)
Pr(X1 → X2) ≤ E
1∏n
i=1(1 + δ2s,rP1P2/n
4N0(P1δ2s,r+No+
P2n
∑n
i=1|hri,d|2)
λi|hri,d|2)
(21)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2286 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
SNR = P/N0, the bound in (24) can be given as
Pr(X1 → X2) ≤ aAF1∏n
i=1 λiSNR−n
n∏i=1
(ln(SNR)
+ ln (Ci))
� aAF1∏n
i=1 λiSNR−n (ln(SNR))n (25)
where
Ci =
(δ2s,rδ
2r,dα(1 − α)/n
)λi
4(αδ2
s,r + (1 − α)δ2r,d
) , i = 1, . . . , n
are constant terms that do not depend on the SNR, and aAF
is a constant that depends on power allocation parameter αand the variances of the channels. The ln(Ci) terms are ne-glected at high SNRs, resulting in the last bound in (25).The diversity order of the system can be calculated as dAF =limSNR→∞ −(log(PEP)/ log(SNR)) = n. The system willachieve a full diversity of order n if matrix M is full rank,i.e., code matrix Φ(X1,X2) must be full rank of order n overall distinct pairs of codewords X1 and X2. It can be easilyshown, following the same approach, that, if the code matrixΦ(X1,X2) is rank deficient, then the system will not achievefull diversity. Thus, any code that is designed to achieve fulldiversity over MIMO channels will achieve full diversity in thecase of the AAF DSTC scheme.
If full diversity is achieved, the coding gain is given as
CAF =(
aAF1∏n
i=1 λi
)− 1n
.
To maximize the coding gain of the AAF distributed ST codes,the product
∏ni=1 λi needs to be maximized, which is the same
as the determinant criterion used over MIMO channels [24].Thus, if an ST code is designed to maximize the coding gainover MIMO channels, it will also maximize the coding gain ifit can be used in a distributed fashion with the AAF protocol.
IV. SYNCHRONIZATION-AWARE DISTRIBUTED ST CODES
In this section, the design of distributed ST codes that relaxthe stringent synchronization requirement is considered. Mostof the previous work on cooperative transmission assumed per-fect synchronization between the relay nodes, which means thatthe relays’ timings, carrier frequencies, and propagation delays
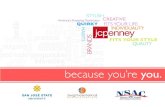
Fig. 3. Baseband signals (each is a raised-cosine pulse-shaped) from tworelays at the receiver.
are identical. To simplify the synchronization in the network, adiagonal structure is imposed on the ST code used. The diag-onal structure of the code bypasses the perfect synchronizationproblem by allowing only one relay to transmit at any time slot.Hence, synchronizing simultaneous in-phase transmissions ofrandomly distributed relay nodes is not necessary.
This greatly simplifies the synchronization since nodes canmaintain slot synchronization, which means that coarse slotsynchronization is available [28].2 However, fine synchroniza-tion is more difficult to achieve. Guard intervals are introducedto ensure that the transmissions from different relays are notoverlapped. One relay is allowed to consecutively transmit itspart of the ST code from different data packets. This allowsthe overhead introduced by the guard intervals to be neglected.Fig. 3 shows the effect of propagation delay on the receivedsignal from two relays. The sampling time in Fig. 3 is theoptimum sampling time for the first relay signal, but clearly,it is not optimal for the second relay signal. Some work hasbeen done on selecting the optimal sampling time [29], butthis only works for the case of two relays. The code designcriterion for the DDSTC is derived. An AAF system model isconsidered, which simplifies the relay node design and preventsthe propagation of relay errors.
2For example, any synchronization scheme that is used for TDMA systemscan be employed to achieve synchronization in the network.
Pr(X1 → X2) ≤n∏
i=1
(δ2
s,rδ2r,dP1P2/n)λi
4N0
(P1δ2
s,r + No + P2δ2r,d
)−1
×n∏
i=1
− exp
−
4N0
(P1δ
2s,r + No + P2δ
2r,d
)(δ2s,rδ
2r,dP1P2/n
)λi
Ei
−
4N0
(P1δ
2s,r + No + P2δ
2r,d
)(δ2s,rδ
2r,dP1P2/n
)λi
(22)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2287
A. DDSTC System Model
In this section, the system model with n relay nodes, whichhelps the source by emulating a diagonal space-time code(STC), is introduced. The system has two phases with the timeframe structure shown in Fig. 2(b). In phase 1, the receivedsignals at the relay nodes are modeled as in (1), with L = n.
In phase 2, the kth relay applies a linear transformation tk tothe received data vector, where tk is an 1 × n row vector, as
yrk= tkys,rk
=√
P1hs,rktks + tkvs,rk
=√
P1hs,rkxk + vrk
(26)
where xk = tks, and vrk= tkvs,rk
. If the linear transforma-tions are restricted to have unit norm, i.e., ‖tk‖2 = 1 for all k,then vrk
is CN (0, No). The relay then multiplies yrkby the
factor
βk ≤√
P2
P1|hs,rk|2 (27)
to satisfy a power constraint of P = P1 + P2 transmitted powerper source symbol [3]. The received signal at the destinationdue to the kth relay transmission is given by
yk =hrk,dβk
√P1hs,rk
xk + hrk,dβkvrk+ vk
=hrk,dβk
√P1hs,rk
xk + zk, k = 1, . . . , n (28)
where vk is modeled as CN (0, N0); hence, zk, given the chan-nel coefficients, is CN (0, (β2
k|hrk,d|2 + 1)N0), k = 1, . . . , n.
B. DDSTC Performance Analysis
In this section, the code design criterion of the DDSTC basedon the PEP analysis is derived. In the following, the powerconstraint in (27) is set to be satisfied with equality.
Now, we start deriving a PEP upper bound to derive the codedesign criterion. Let σ2
k denote the variance of zk in (28), whichis given by
σ2k =
(P2|hrk,d|2P1|hs,rk
|2 + 1)
N0, k = 1, . . . , n. (29)
Then, define the codeword vector x from (26) as
x =[tT1 , tT
2 , . . . , tTn
]T︸ ︷︷ ︸T
s = Ts (30)
where T is an n × n linear transformation matrix. From x,define the n × n code matrix X = diag(x), which is a di-agonal matrix with the elements of x on its diagonal. Lety = [y1, y2, . . . , yn]T denote the received data vector at thedestination node, as given in (28).
Using our system model assumptions, the probability densityfunction (pdf) of y, given the source data vector s and the CSI,is given by
p (y|s, CSI) =
(n∏
i=1
1πσ2
i
)
× exp
−
n∑i=1
1σ2
i
∣∣∣∣∣yi −√
P1P2
P1 |hs,ri|2
hs,rihri,dxi
∣∣∣∣∣2 (31)
from which the ML decoder can be expressed as
arg maxs∈S
p(y|s, CSI)
= arg mins∈S
n∑i=1
1σ2
i
∣∣∣∣∣yi −√
P1P2
P1|hs,ri|2 hs,ri
hri,dxi
∣∣∣∣∣2
(32)
where S is the set of all possible transmitted source datavectors.
The PEP of mistaking X1 by X2 can be upper boundedas [30]
Pr(X1 → X2) ≤ E {exp (λ [ln p (y|s2) − ln p (y|s1)])}(33)
where X1 and X2 are the code matrices corresponding tothe source data vectors s1 and s2, respectively. Equation (33)applies for any λ, which is a parameter that can be adjusted toget the tightest bound. Now, the PEP can be written as (34),shown at the bottom of the page, where the expectation is overthe noise and channel coefficients statistics, and xij is the jthelement of the ith code vector.
To average the expression in (34) over the noise statistics,define receiver noise vector z = [z1, z2, . . . , zn]T , where the
Pr(X1 → X2) ≤ E
{exp
(− λ
[n∑
i=1
1σ2
i
(√P1P2
P1|hs,ri|2 hs,ri
hri,d(x1i − x2i)z∗i
+
√P1P2
P1|hs,ri|2 h∗
s,rih∗
ri,d(x1i − x2i)∗zi +
P1P2
P1|hs,ri|2 |hs,ri
|2|hri,d|2|x1i − x2i|2)])}
(34)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2288 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
zi’s are as defined in (28). The pdf of z, given the CSI, isgiven by
p(z|CSI) =
(n∏
i=1
1πσ2
i
)exp
(−
n∑i=1
1σ2
i
ziz∗i
). (35)
Taking the expectation in (34) over z, given the channel coef-ficients, yields (36), shown at the bottom of the page. Chooseλ = 1/2 that maximizes the term λ(1 − λ), i.e., minimizes thePEP upper bound. Substituting for the σ2
i ’s from (29), the PEPcan be upper bounded as (37), shown at the bottom of the page.
To get the expression in (37), let us define the variable
γi =P1|hs,ri
|2P2|hri,d|2(P1|hs,ri
|2 + P2|hri,d|2)N0, i = 1, . . . , n
which is the scaled harmonic mean3 of the two exponentialrandom variables ((P1|hs,ri
|2)/N0) and ((P2|hri,d|2)/N0).Averaging the expression in (37) over the channel coefficients,the upper bound on the PEP can be expressed as
Pr(X1 → X2) ≤n∏
i=1,x1i =x2i
Mγi
(14|x1i − x2i|2
)(38)
where Mγi(.) is the moment-generating function (MGF) of
random variable γi. The problem now is getting an expressionfor Mγi
(.). To get Mγi(.), let y1 and y2 be two independent
exponential random variables with parameters α1 and α2, re-spectively. Let y = (y1y2/(y1 + y2)) be the scaled harmonicmean of y1 and y2. Then, the MGF of y is [4]
My(s)=(α1−α2)2+(α1+α2)s
∆2
+2α1α2s
∆3ln
(α1+α2+s+∆)2
4α1α2(39)
3The scaling factor is 1/2 since the harmonic mean of two numbers g1 andg2 is (2g1g2/(g1 + g2)).
where
∆ =√
(α1 − α2)2 + 2(α1 + α2)s + s2.
Using the expression in (39), the MGF for γi can be approxi-mated at a high-enough SNR to be [4]
Mγi(s) � ζi
s(40)
where
ζi =N0
P1δ2s,r
+N0
P2δ2r,d
.
The PEP can now be upper bounded as
Pr(X1 → X2) ≤ Nn0
n∏
i=1,x1i =x2i
(1
P1δ2s,r
+1
P2δ2r,d
)
×
n∏
i=1,x1i =x2i
14|x1i − x2i|2
−1
. (41)
Let P1 = αP and P2 = (1 − α)P , where P is the power persymbol, for some α ∈ (0, 1), and define SNR = P/N0. Thediversity order dDDSTC of the system is
dDDSTC = limSNR→∞
− log(PEP)log(SNR)
= minm =j
rank(Xm − Xj)
(42)
where Xm and Xj are two possible code matrices. To achievea diversity order of n, matrix Xm − Xj should be full rankfor any m = j (i.e., xmi = xji ∀m = j ∀i = 1, . . . , n). Intu-itively, if two code matrices exist, for which the rank of matrixXm − Xj is not n, this means that they have at least onediagonal element that is the same in both matrices. Clearly, thiselement cannot be used to decide between these two possibletransmitted code matrices; hence, the diversity order of the
Pr(X1 → X2) ≤E
exp
(−λ(1 − λ)
n∑i=1
1σ2
i
P1P2
P1|hs,ri|2(|hs,ri
|2|hri,d|2|x1i − x2i|2))
×∫z
(n∏
i=1
1πσ2
i
)exp
−
n∑i=1
1σ2
i
∣∣∣∣∣zi + λ
√P1P2
P1|hs,ri|2 hs,ri
hri,d(x1i − x2i)
∣∣∣∣∣2 dz
=E
{exp
(−λ(1 − λ)
n∑i=1
1σ2
i
P1P2
P1|hs,ri|2(|hs,ri
|2|hri,d|2|x1i − x2i|2))}
(36)
Pr(X1 → X2) ≤ E
{exp
(−1
4
n∑i=1
P1|hs,ri|2P2|hri,d|2
(P1|hs,ri|2 + P2|hri,d|2) N0
|x1i − x2i|2)}
(37)
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2289
system is reduced. This criterion implies that each element inthe code matrix is unique to that matrix and that any othermatrix will have a different element at that same location, whichis really the source of diversity. Furthermore, to minimize thePEP bound in (41), we need to maximize
minm =j
(n∏
i=1
|xmi − xji|2)1/n
(43)
which is called the minimum product distance of the set ofsymbols s = [s1, s2, . . . , sn]T [31], [32]. A linear mapping isused to form the transmitted codeword, i.e.,
x = Ts. (44)
Several works have considered the design of the n × n trans-formation matrix t to maximize the minimum product distance.It was proposed in [33] and [34] to use both Hadamard trans-forms and Vandermonde matrices to design the t matrix. Thetransforms based on the Vandermonde matrices were shownto give larger minimum product distance than the Hadamard-based transforms. Some of the best known transforms based onthe Vandermonde matrices [18] are summarized. Two classesof optimum transforms were proposed in [33].
1) If n = 2k (k ≥ 1), the optimum transform is given byTopt = (1/
√n)vander(θ1, θ2, . . . , θn), where θ1, θ2, . . . ,
θn are the roots of the polynomial θn − j over the fieldQ[j] � {c + dj : both c and d are rational numbers},and they are determined as θi = ej(4i−3/2n)π, i = 1,2, . . . , n.
2) If n = 3.2k (k ≥ 0), the optimum transform is given byTopt = 1√
nvander(θ1, θ2, . . . , θn), where θ1, θ2, . . . , θn
are the roots of the polynomial θn + w over the fieldQ[w] � {c + dw : both c and d are rational numbers},and they are determined as θi = ej 6i−1
3n π, i = 1, 2, . . . , n.The signal constellation from Z[j], such as QAM, M -aryphase-shift keying, and pulse amplitude modulation constella-tions, are of practical interest. Moreover, in [34], some nonop-timal transforms were proposed for some n’s not satisfying anyof the aforementioned two cases.
V. SIMULATION RESULTS
In this section, simulation results for the DSTC schemesfrom the previous sections are presented. In the simulations,the variance of any source–relay or relay–destination channelis taken as 1. The performance of the different schemes withtwo relays helping the source is compared. Fig. 4 shows thesimulations for two DAF systems using the Alamouti scheme(DAF Alamouti) and the diagonal STC (DAF DAST); dis-tributed ST codes based on the LD ST codes (LD-DSTC)[14], which are based on the AAF scheme; the orthogonaldistributed ST codes (O-DSTC) proposed in [35] and [36];and DDSTC. The O-DSTCs are based on a generalized AAFscheme, where relay nodes apply linear transformation to thereceived data as well as their complex conjugate. All of thesesystems have a data rate of 1/2. Quaternary phase-shift keying(QPSK) modulation is used, which means that a rate of one
Fig. 4. BER for two relays with a data rate of 1 bit/sym.
Fig. 5. BER for three relays with a data rate of 1 bit/sym.
transmitted bit per symbol (1 bit/sym) is achieved. For the DAFsystem, the power of the relay nodes that have erroneouslydecoded is not reallocated to other relay nodes. Clearly, DAF-based systems outperform AAF-based systems,4 but this isunder the assumption that each relay node can decide whetherit has correctly decoded or not. Intuitively, the DAF protocolwill deliver signals that are less noisy to the destination. Thenoise is suppressed at the relay nodes by transmitting a noise-free version of the signal. The AAF delivers more noise tothe destination due to noise propagation from the relay nodes.However, the assumption of correct decision at the relay nodesimposes practical limitations on the DAF systems; otherwise,error propagation [3] may occur, because of the errors at therelay nodes. Error propagation would highly degrade systembit error rate (BER) performance.
Fig. 5 shows the simulation results for two DAF systemsusing the G3 ST block code of [26] and the diagonal STC(DAF DAST), LD-DSTC, and DDSTC. For fair comparison,
4DDSTC is based on the AAF protocol.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2290 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
Fig. 6. BER performance with propagation delay mismatch. Two relay cases.
the number of transmitted bits per symbol is fixed at 1 bit/sym.The G3 ST block code has a data rate of 1/2 [26], whichresults in an overall system data rate of 1/3. Therefore, eight-phase phase-shift keying (8-PSK) modulation is employed forthe system that uses the G3 ST block code. For the otherthree systems, QPSK modulation is used, as these systemshave a data rate of 1/2. For the DAF system, the power ofthe relay nodes that erroneously decoded is not reallocated.Clearly, DAF-based systems outperform AAF-based systemsunder the same constraints previously stated. It is noteworthythat the performance of the LD-DSTC is not optimized sincethe LD matrices are randomly selected based on the isotropicdistribution on the space of n × n unitary matrices, as in [14].The performance of the LD-based codes can be improved bytrying to optimize the selection of the LD matrices, which isout of the scope of this paper.
In the sequel, the effect of the synchronization errors onthe system BER performance is investigated. Fig. 6 shows thecase of having two relays helping the source and propagationdelay mismatches of T2 = 0.2T, 0.4T, and 0.6T , where T isthe time slot duration. Raised-cosine pulse-shaped waveformswere used with a rolloff factor of 0.2 and QPSK modulation.Clearly, the BER performance of the system greatly deterioratesas the propagation delay mismatch becomes larger. Fig. 7 showsthe case of having three relays helping the source for differentpropagation delay mismatches. The DAF system using the G3
ST block code of [26] and the DDSTC were compared. For faircomparison, the number of transmitted bits per symbol is fixedat 1 bit/sym. Again, the G3 ST block code has a data rate of1/2 [26], which results in an overall system data rate of 1/3.Therefore, 8-PSK modulation is employed for the system thatuses the G3 ST block code. For the DDSTC, QPSK modulationis used, as the system has a data rate of 1/2. Raised-cosinepulse-shaped waveforms with a rolloff factor of 0.2 are used.Clearly, system performance is highly degraded as the propa-gation delay mismatch becomes larger. From Figs. 6 and 7, itis clear that the synchronization errors can greatly deterioratesystem BER performance. The DDSTC bypasses this problemby allowing only one relay transmission at any time slot.
Fig. 7. BER performance with propagation delay mismatch. Three relaycases.
VI. CONCLUSION
The design of distributed ST codes in wireless relay networksis considered for different schemes, which vary in the process-ing performed at the relay nodes. For the DAF distributedST codes, any ST code that is designed to achieve full diversityover MIMO channels can achieve full diversity under theassumption that the relay nodes can decide whether they havecorrectly decoded or not. A code that maximizes the codinggain over MIMO channels is not guaranteed to maximize thecoding gain in the DAF DSTC. This is due to the fact thatnot all of the relays will always transmit their code columnsin the second phase. Then, the code design criteria for theAAF distributed ST codes were considered. In this case, a codedesigned to achieve full diversity over MIMO channels willalso achieve full diversity. Furthermore, a code that maximizesthe coding gain over MIMO channels will also maximize thecoding gain in the AAF distributed ST scheme.
The design of DDSTC for wireless relay networks wasinvestigated. In DDSTC, the diagonal structure of the codewas imposed to simplify the synchronization between randomlylocated relay nodes. Synchronization mismatches between therelay nodes cause intersymbol interference, which can greatlydegrade system performance. DDSTC relaxes the stringent syn-chronization requirement by allowing only one relay to transmitat any time slot. The code design criterion for the DDSTC basedon minimizing the PEP was derived, and the design criterionwas found to maximize the minimum product distance. Thisis the same criterion used to design DAST codes and full-rate,full-diversity SF codes.
REFERENCES
[1] E. Telatar, “Capacity of multi-antenna Gaussian channels,” Eur. Trans.Telecommun., vol. 10, no. 6, pp. 585–595, Nov./Dec. 1999.
[2] J. N. Laneman and G. W. Wornell, “Distributed space-time coded pro-tocols for exploiting cooperative diversity in wireless networks,” IEEETrans. Inf. Theory, vol. 49, no. 10, pp. 2415–2425, Oct. 2003.
[3] J. N. Laneman, D. N. C. Tse, and G. W. Wornell, “Cooperative diversity inwireless networks: Efficient protocols and outage behavior,” IEEE Trans.Inf. Theory, vol. 50, no. 12, pp. 3062–3080, Dec. 2004.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

SEDDIK et al.: DESIGN CRITERIA AND PERFORMANCE ANALYSIS FOR DISTRIBUTED SPACE-TIME CODING 2291
[4] W. Su, A. K. Sadek, and K. J. R. Liu, “Cooperative communica-tion protocols in wireless networks: Performance analysis and optimumpower allocation,” Wireless Pers. Commun., vol. 44, no. 2, pp. 181–217,Jan. 2008.
[5] A. K. Sadek, W. Su, and K. J. R. Liu, “Multinode cooperative communi-cations in wireless networks,” IEEE Trans. Signal Process., vol. 55, no. 1,pp. 341–355, Jan. 2007.
[6] A. Robeiro, X. Cai, and G. B. Giannakis, “Symbol error probabilitiesfor general cooperative links,” IEEE Trans. Wireless Commun., vol. 52,no. 10, pp. 1820–1830, Oct. 2004.
[7] M. O. Hasna and M. S. Alouini, “End-to-end performance of transmissionsystems with relays over Rayleigh-fading channels,” IEEE Trans. WirelessCommun., vol. 2, no. 6, pp. 1126–1131, Nov. 2003.
[8] R. Pabst, “Relay-based deployment concepts for wireless and mobilebroadband radio,” IEEE Commun. Mag., vol. 42, no. 9, pp. 80–89,Sep. 2004.
[9] K. G. Seddik, A. K. Sadek, W. Su, and K. J. R. Liu, “Outage analysisand optimal power allocation for multinode relay networks,” IEEE SignalProcess. Lett., vol. 14, no. 6, pp. 377–380, Jun. 2007.
[10] M. Dohler, B. A. Rassool, and A. H. Aghvami, “Performance evalua-tion of STTCs for virtual antenna arrays,” in Proc. IEEE VTC—Spring,Apr. 2003, vol. 1, pp. 57–60.
[11] B. Sirkeci-Mergen and A. Scaglione, “Randomized distributed space-timecoding for cooperative communication in self-organized networks,” inProc. IEEE Workshop SPAWC, Jun. 5–8, 2005, pp. 500–504.
[12] P. A. Anghel, G. Leus, and M. Kaveh, “Multi-user space-timecoding in cooperative networks,” in Proc. ICASSP, Apr. 6–10, 2003,pp. IV-73–IV-76.
[13] S. Barbarossa, L. Pescosolido, D. Ludovici, L. Barbetta, and G. Scutari,“Cooperative wireless networks based on distributed space-time coding,”in Proc. IEEE IWWAN, May 31–Jun. 3, 2004, pp. 30–34.
[14] Y. Jing and B. Hassibi, “Distributed space-time codes in wireless re-lay networks,” in Proc. 3rd IEEE Sensor Array Multi-Channel SignalProcess. Workshop, Jul. 18–21, 2004, pp. 249–253.
[15] B. Hassibi and B. M. Hochwald, “High-rate codes that are linear inspace and time,” IEEE Trans. Inf. Theory, vol. 48, no. 7, pp. 1804–1824,Jul. 2002.
[16] K. G. Seddik, A. K. Sadek, and K. J. R. Liu, “Protocol-aware designcriteria and performance analysis for distributed space-time coding,” inProc. IEEE GLOBECOM, Dec. 2006, pp. 1–5.
[17] M. O. Damen, K. Abed-Meraim, and J. C. Belfiore, “Diagonal algebraicspace-time block codes,” IEEE Trans. Inf. Theory, vol. 48, no. 2, pp. 628–636, Mar. 2002.
[18] W. Su, Z. Safar, and K. J. R. Liu, “Full-rate full-diversity space-frequencycodes with optimum coding advantage,” IEEE Trans. Inf. Theory, vol. 51,no. 1, pp. 229–249, Jan. 2005.
[19] W. Su, Z. Safar, and K. J. R. Liu, “Towards maximum achievable di-versity in space, time, and frequency: Performance analysis and codedesign,” IEEE Trans. Wireless Commun., vol. 4, no. 4, pp. 1847–1857,Jul. 2005.
[20] P. Merkey and E. C. Posner, “Optimum cyclic redundancy codes fornoisy channels,” IEEE Trans. Inf. Theory, vol. IT-30, no. 6, pp. 865–867,Nov. 1984.
[21] M. K. Simon and M. S. Alouini, Digital Communication over General-ized Fading Channels: A Unified Approach to the Performance Analysis.Hoboken, NJ: Wiley, 2000.
[22] S. Siwamogsatham, M. P. Fitz, and J. H. Grimm, “A new viewof performance analysis of transmit diversity schemes in correlatedRayleigh fading,” IEEE Trans. Inf. Theory, vol. 48, no. 4, pp. 950–956,Apr. 2002.
[23] R. A. Horn and C. R. Johnson, Matrix Analysis. Cambridge, U.K.:Cambridge Univ. Press, 1985.
[24] V. Tarokh, N. Seshadri, and A. R. Calderbank, “Space-time codes forhigh data rate wireless communication: Performance criterion and codeconstruction,” IEEE Trans. Inf. Theory, vol. 44, no. 2, pp. 744–765,Mar. 1998.
[25] S. M. Alamouti, “A simple transmit diversity technique for wireless com-munications,” IEEE J. Sel. Areas Commun., vol. 16, no. 8, pp. 1451–1458,Oct. 1998.
[26] V. Tarokh, H. Jafarkhani, and A. R. Calderbank, “Space-time block codingfor wireless communications: Performance results,” IEEE J. Sel. AreasCommun., vol. 17, no. 3, pp. 451–460, Mar. 1999.
[27] I. S. Gradshteyn and I. M. Ryshik, Table of Integrals, Series and Products,6th ed. New York: Academic, 2000.
[28] X. Li, “Space-time coded multi-transmission among distributed transmit-ters without perfect synchronization,” IEEE Signal Process. Lett., vol. 11,no. 12, pp. 948–951, Dec. 2004.
[29] Y. Mei, Y. Hua, A. Swami, and B. Daneshrad, “Combating synchroniza-tion errors in cooperative relays,” in Proc. IEEE ICASSP, Mar. 19–23,2005, pp. iii/369–iii/372.
[30] H. L. Van Trees, Detection, Estimation, and Modulation Theory—Part I.Hoboken, NJ: Wiley, 1968.
[31] C. Schlegel and D. J. Costello, Jr., “Bandwidth efficient coding for fadingchannels: Code construction and performance analysis,” IEEE J. Sel.Areas Commun., vol. 7, no. 9, pp. 1356–1368, Dec. 1989.
[32] K. Boull and J. C. Belfiore, “Modulation schemes designed for theRayleigh channel,” in Proc. CISS, Mar. 1992, pp. 288–293.
[33] X. Giraud, E. Boutillon, and J. C. Belfiore, “Algebraic tools to build mod-ulation schemes for fading channels,” IEEE Trans. Inf. Theory, vol. 43,no. 3, pp. 938–952, May 1997.
[34] J. Boutros and E. Viterbo, “Signal space diversity: A power- andbandwidth-efficient diversity technique for the Rayleigh fading channel,”IEEE Trans. Inf. Theory, vol. 44, no. 4, pp. 1453–1467, Jul. 1998.
[35] Y. Jing and H. Jafarkhani, “Using orthogonal and quasi-orthogonal de-signs in wireless relay networks,” in Proc. IEEE GLOBECOM, Dec. 2006,pp. 1–5.
[36] T. Kiran and B. S. Rajan, “Distributed space-time codes with reduceddecoding complexity,” in Proc. IEEE ISIT, Jul. 2006, pp. 542–546.
Karim G. Seddik (S’04) received the B.S. (withhighest honors) and M.S. degrees in electrical en-gineering from Alexandria University, Alexandria,Egypt, in 2001 and 2004, respectively. He is cur-rently working toward the Ph.D. degree with theDepartment of Electrical and Computer Engineering,University of Maryland, College Park.
His research interests include cooperative com-munications and networking, MIMO-OFDM sys-tems, and distributed detection in wireless sensornetworks.
Mr. Seddik received a certificate of honor from the Egyptian President in2002 for being ranked first among all departments in the College of Engineer-ing, Alexandria University, the Graduate School Fellowship Awards from theUniversity of Maryland in 2004 and 2005, and the Future Faculty ProgramFellowship Award from the University of Maryland in 2007.
Ahmed K. Sadek (S’03) received the B.S. (withhighest honors) and M.S. degrees in electrical en-gineering from Alexandria University, Alexandria,Egypt, in 2000 and 2003, respectively, and the Ph.D.degree in electrical engineering from the Universityof Maryland, College Park, in 2007.
In 2007, he joined the Corporate R&D Division,Qualcomm Inc., San Diego, CA, as a Senior Engi-neer. His research interests include cognitive radios,cooperative communications, wireless and sensornetworks, MIMO-OFDM systems, and blind signal
processing techniques.Dr. Sadek received the First Prize in the IEEE Egypt Section Undergraduate
Student Contest in 2000 for his B.S. graduation project, the Graduate SchoolFellowship Awards from the University of Maryland in 2003 and 2004, and theDistinguished Dissertation Fellowship Award from the Department of ElectricalEngineering, University of Maryland, in 2007.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.

2292 IEEE TRANSACTIONS ON VEHICULAR TECHNOLOGY, VOL. 57, NO. 4, JULY 2008
Ahmed S. Ibrahim (S’04) received the B.S. (withhighest honors) and M.S. degrees in electrical en-gineering from Cairo University, Cairo, Egypt, in2002 and 2004, respectively. He is currently workingtoward the Ph.D. degree with the Department ofElectrical and Computer Engineering, University ofMaryland, College Park.
His research interests include cooperative commu-nications and networking, cross-layer design of wire-less networks, MIMO-OFDM systems, and signalprocessing algorithms for data manipulation.
Mr. Ibrahim received the Graduate School Fellowship Awards from theUniversity of Maryland in 2004 and 2005.
K. J. Ray Liu (F’03) received the B.S. degreefrom the National Taiwan University, Taipei, Taiwan,R.O.C., and the Ph.D. degree from the Universityof California at Los Angeles, both in electricalengineering.
He is Professor and Associate Chair, GraduateStudies and Research, Electrical and ComputerEngineering Department, University of Maryland,College Park. His research contributions encompassbroad aspects of wireless communications and net-working, information forensics and security, multi-
media communications and signal processing, bioinformatics and biomedicalimaging, and signal processing algorithms and architectures.
Dr. Liu is the recipient of numerous honors and awards, including best paperawards from the IEEE Signal Processing Society (twice), the IEEE VehicularTechnology Society, and EURASIP; an IEEE Signal Processing SocietyDistinguished Lecturer, the EURASIP Meritorious Service Award, and theNational Science Foundation Young Investigator Award. He also received vari-ous teaching and research recognitions from University of Maryland, includingthe university-level Distinguished Scholar-Teacher Award, the Invention ofthe Year Award, elected as a Fellow of Academy for Excellence in Teachingand Learning, and a college-level Poole and Kent Company Senior FacultyTeaching Award. He is Vice President–Publications and is on the Board ofGovernors of the IEEE Signal Processing Society. He was the Editor-in-Chiefof the IEEE Signal Processing Magazine and the founding Editor-in-Chief ofthe EURASIP Journal on Applied Signal Processing.
Authorized licensed use limited to: University of Maryland College Park. Downloaded on May 12, 2009 at 21:06 from IEEE Xplore. Restrictions apply.