Design and Optimization of the University of Wisconsin's ... · Wisconsin's Parallel...
18
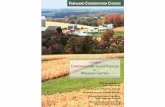
1 Design and Optimization of the University of Wisconsin's Parallel Hybrid-Electric Sport Utility Vehicle Ryan F. Rowe, Jennifer A. Topinka, Ethan K. Brodsky, Julie G. Marshaus, Glenn R. Bower University of Wisconsin–Madison ABSTRACT The University of Wisconsin – Madison FutureTruck Team has designed and built a four-wheel drive, charge sustaining, parallel hybrid-electric sport utility vehicle for entry into the FutureTruck 2001 competition. The base vehicle is a 2000 Chevrolet Suburban. Our FutureTruck is nicknamed the “Moollennium” and weighs approximately 2427 kg. The vehicle uses a high efficiency, 2.5 liter, turbo-charged, compression ignition common rail, direct-injection engine supplying approximately 104 kW of peak power and a three phase AC induction motor that provides an additional 68.5 kW of peak power. This hybrid drivetrain is an attractive alternative to the large displacement V8 drivetrain, as it provides comparable performance with lower emissions and fuel consumption. The PNGV Systems Analysis Toolkit (PSAT) model predicts a Federal Testing Procedure (FTP) urban driving cycle fuel economy of 11.24 km/L (26.43 mpg) with California Ultra Low Emission Vehicle (ULEV) emissions levels. These goals will be met while maintaining the full passenger/cargo capacity, appearance, and towing capacity of 3175 kg. INTRODUCTION FutureTruck is a student competition whose goals are to build a Sport Utility Vehicle (SUV) that maintains current standards of safety, performance, comfort, utility and affordability, while at the same time improving fuel economy and reducing Greenhouse Gas (GHG) emissions by two-thirds. Fifteen universities from North America will compete in FutureTruck 2001, which is sponsored by the US Department of Energy and General Motors’ Truck Group. The University of Wisconsin has designed a charge sustaining, parallel hybrid-electric vehicle for FutureTruck 2001, as depicted in figure 1. To optimize the Moollennium’s design, the UW FutureTruck team used knowledge gained from FutureTruck 2000 [1] and ongoing testing on the Aluminum Cow (a parallel hybrid- electric sedan) [2]. A large emphasis was placed on weight reduction as it is a key to achieving our fuel economy and emission goals. The team set an aggressive weight reduction goal of 2268 kg after the addition of the hybrid drivetrain components. The UW- Madison vehicle performance goals for this year are listed in Table 1. TEAM ORGANIZATION The UW FutureTruck team consists of six groups: Mechanical, Electrical, Engine, Controls, Business, and Information (team composition is shown in Table 2). These six groups are overseen by a faculty advisor and a student team leader. The team RADAR acts as the liaison between organizers and the UW team. There are approximately 40 team members, 17 of whom are participating in the FutureTruck project for course credit. Three team members are graduate students. 68.5 kW Motor 3.09 kW-hr NiMH Battery 104 kW TDI Engine 78 kW Inverter High Voltage Interface Fuel Tank 64.4 L DC AC 2 4R 1 3 5 6 speed Transmission Transfer Case Computer Driver Interface Figure 1. The University of Wisconsin’s 2001 parallel- assist hybrid electric vehicle layout. Table 1. UW FutureTruck 2001 Performance Goals. Parameter 2001 Goals Combined FTP Fuel Economy 11.9 km/L (28 mpg) Emissions ULEV Acceleration: 0–100 kph <12 seconds Range 764 km (475 mi) Vehicle Weight 2268 kg (5000 lb)
Transcript of Design and Optimization of the University of Wisconsin's ... · Wisconsin's Parallel...

1
Design and Optimization of the University of Wisconsin's Parallel Hybrid-Electric Sport Utility Vehicle
Ryan F. Rowe, Jennifer A. Topinka, Ethan K. Brodsky, Julie G. Marshaus, Glenn R. Bower
University of Wisconsin–Madison
ABSTRACT
The University of Wisconsin – Madison FutureTruck Team has designed and built a four-wheel drive, charge sustaining, parallel hybrid-electric sport utility vehicle for entry into the FutureTruck 2001 competition. The base vehicle is a 2000 Chevrolet Suburban. Our FutureTruck is nicknamed the “Moollennium” and weighs approximately 2427 kg. The vehicle uses a high efficiency, 2.5 liter, turbo-charged, compression ignition common rail, direct-injection engine supplying approximately 104 kW of peak power and a three phase AC induction motor that provides an additional 68.5 kW of peak power. This hybrid drivetrain is an attractive alternative to the large displacement V8 drivetrain, as it provides comparable performance with lower emissions and fuel consumption. The PNGV Systems Analysis Toolkit (PSAT) model predicts a Federal Testing Procedure (FTP) urban driving cycle fuel economy of 11.24 km/L (26.43 mpg) with California Ultra Low Emission Vehicle (ULEV) emissions levels. These goals will be met while maintaining the full passenger/cargo capacity, appearance, and towing capacity of 3175 kg.
INTRODUCTION
FutureTruck is a student competition whose goals are to build a Sport Utility Vehicle (SUV) that maintains current standards of safety, performance, comfort, utility and affordability, while at the same time improving fuel economy and reducing Greenhouse Gas (GHG) emissions by two-thirds. Fifteen universities from North America will compete in FutureTruck 2001, which is sponsored by the US Department of Energy and General Motors’ Truck Group. The University of Wisconsin has designed a charge sustaining, parallel hybrid-electric vehicle for FutureTruck 2001, as depicted in figure 1. To optimize the Moollennium’s design, the UW FutureTruck team used knowledge gained from FutureTruck 2000 [1] and ongoing testing on the Aluminum Cow (a parallel hybrid-electric sedan) [2]. A large emphasis was placed on
weight reduction as it is a key to achieving our fuel economy and emission goals. The team set an aggressive weight reduction goal of 2268 kg after the addition of the hybrid drivetrain components. The UW-Madison vehicle performance goals for this year are listed in Table 1.
TEAM ORGANIZATION
The UW FutureTruck team consists of six groups: Mechanical, Electrical, Engine, Controls, Business, and Information (team composition is shown in Table 2). These six groups are overseen by a faculty advisor and a student team leader. The team RADAR acts as the liaison between organizers and the UW team. There are approximately 40 team members, 17 of whom are participating in the FutureTruck project for course credit. Three team members are graduate students.
68.5 kWMotor
3.09 kW-hr NiMH Battery
104 kW TDI Engine
78 kW Inverter High Voltage
Interface
Fuel Tank 64.4 L
DC
AC
2 4 R 1 3 5
6 speed Transmission
Transfer Case
Computer
Driver Interface
Figure 1. The University of Wisconsin’s 2001 parallel-
assist hybrid electric vehicle layout.
Table 1. UW FutureTruck 2001 Performance Goals.Parameter 2001 Goals Combined FTP Fuel Economy 11.9 km/L (28 mpg)
Emissions ULEV Acceleration: 0–100 kph <12 seconds Range 764 km (475 mi) Vehicle Weight 2268 kg (5000 lb)

2
Each group is headed by a group leader. The group leaders are in charge of planning and assigning projects to the group members and providing them guidance. Group leaders are also responsible for setting and meeting project completion deadlines. The team leader oversees all of the groups to ensure that projects are completed as planned and facilitates communication between groups for multidiscipline projects. The faculty advisor gives guidance, answers technical questions, and promotes relationships with industry representatives. Figure 2 is a general timeline compiled from the project completion date goals of the groups. In preparation for competition in June of 2001, the team has successfully achieved milestones depicted on the timeline.
VEHICLE ENERGY CONSUMPTION MODELING
In order to improve overall efficiency, it was necessary to model vehicle energy consumption. The road power demand equation represents the energy consumption of a vehicle and defines where power is dissipated as the vehicle travels down the road [3]. The equation is the basis for the vehicle simulation developed by the University of Wisconsin, which is used to quantify the effects of modifications to the vehicle. The equations necessary to calculate road power demand for a given driving condition are shown in numbers 1-6 (Symbol definitions are listed in Appendix A).
(1) Proad = Proll + Phill + Paero + Paccel + Paux (2) Proll = m g V Crr cos θ (3) Phill = m g V sin θ (4) Paero = 0.5 ρ A V3 Cd (5) Paccel = d Ekinetic / dt = m V dV / dt (6) Paux = f (alternator, power steering, etc.) The road power demand Equation (1) identifies the vehicle design aspects that can be changed to improve the overall energy efficiency of the vehicle. Fuel economy on the FTP 75 cycle was calculated using this equation with reported component efficiencies. The relative importance of reducing each of the equation parameters is shown in figure 3 [4]. As displayed in the figure, the vehicle mass is the dominant factor in vehicle energy consumption. The second most important factor is aerodynamic drag, which, due to the large frontal area of an SUV, is a significant factor for our vehicle. Therefore, the design focus was on weight reduction and aerodynamic improvements.
DRIVETRAIN
Components exactly matching ‘ideal’ specifications are rarely obtainable, therefore, component availability was a dominating constraint as the team searched for a desirable combination of engine, transmission, and electric drive system. The UW team researched and identified viable component options for integration into the 2001 UW FutureTruck. When searching for components, American manufacturers were considered first. This was done to minimize component lead times and increase the feasibility of manufacturing the Moollennium domestically.
Table 2. Team Composition by Major. Mechanical Engineering 62.5 %
Electrical and Computer Engineering
25%
Industrial Engineering 5%
Materials Science 2.5%
Other 5%
Task Sept
O
ct
Nov
D
ec
Jan
Feb
Mar
ch
April
M
ay
Design Component Selection Building of Al Frame Component Arrival Testing of Al Frame Testing Components Arrival of Al Frame Components in Frame Truck Drivable
Figure 2. UW-Madison FutureTruck 2001 project
timeline.
0 10 20 30 40 501.0
1.1
1.2
1.3 Mass Aero Tires Accessories
EPA
Com
bine
d Fu
el E
cono
my
Mag
.
Parameter Reduction (%) Figure 3. Fuel economy gain vs. parameter reduction.

3
Throughout the selection process, appropriately sized components were chosen to maximize energy efficiency and minimize weight. A packaging diagram of the Wisconsin FutureTruck is shown in figure 4.
Mechanical Drive System Engine – A search of economically viable engines revealed two engine alternatives – Spark Ignited (SI) or Compression Ignited (CI). A study by Thomas et al. [5] concluded that natural gas hybrid and diesel hybrid vehicles produce the lowest overall greenhouse (CO2) gas emissions – even lower than hydrogen fuel cell vehicles when the full well-to-wheels analysis is considered. It also concluded that between these two powertrains, a diesel hybrid was 14% more fuel efficient than a natural gas hybrid. The compression ignition hybrid was the most fuel-efficient piston powered option considered by this study. For the aforementioned reasons, the Wisconsin team chose a common rail compression ignition direct-injection (CIDI) engine for its 2001 FutureTruck. To maintain the towing utility of the Suburban, the minimum engine power requirement is 90 kW (120 hp). This value is based on the power required to travel up a 5% grade at 80 km/hr while pulling a 3175 kg trailer – this requires more power than pulling the trailer up a 1% grade into a 48 km/hr head wind (see figure 5). This graph was generated using the power equations described in the vehicle energy consumption section. When choosing the appropriate engine size, it is imperative that the peak power requirement can be achieved throughout the upper 25% of the engine’s operating range (1000 rpm band). This will guarantee
deliverable performance since traditional transmissions have discrete gears and engines cannot be operated at peak power under all conditions. Because of the torque-rise characteristic of the CIDI engine a 25% factor of safety on peak power will ensure that power demands can be achieved during extended hill climbs.
Ideal midrange diesels that provide the optimal power are currently unavailable domestically. An increase from the ideal engine size would consume more fuel and increase vehicle weight, defeating the purpose of a hybrid vehicle. Therefore, it was determined that the best option would be to decrease engine size and meet the necessary power requirements with a larger electric motor. Table 3 lists the engines that were considered. The 2.4L PUMA was used in FutureTruck 2000. This proved to provide less than sufficient torque. During the planning stages for FutureTruck 2001, the 2.5L Land Rover engine became available. This engine, while having nearly the same power output as the PUMA, has significantly higher low-end torque and a flatter torque curve.
Table 3. Engine Comparison Engine Type Power Weight Deciding
Factors
2.5L Detroit Diesel 104 kW/ 140 hp 228 kg Not Available
2.4L PUMA 99 kW/ 125 hp 204 kg
Unacceptable Low-End Torque
3.0L Isuzu 117 kW/ 157 hp 236 kg Not Available
4.5L Navistar 175 kW/ 235 hp 340 kg Not Available
2.5L Land Rover 104 kW/ 140hp 225 kg
Available
Met needs
0 20 40 60 80 100
0
50
100
150
200
250
Req
uire
d Po
wer
( kw
)
Vehicle Speed ( km/ hr )
5% grade, zero head wind, with 3175 kg Trailer 1% grade, 48 km/hr head wind, with 3175 kg Trailer
Figure 5. Power requirements for the Moollennium to tow a 3175 kg trailer for different conditions.
6-speed Manual Transmission
Land Rover Engine
Marathon Electric Motor
Fuel Tank
High Voltage Battery Pack
Transfer Case
Figure 4. UW vehicle packaging diagram.

In cyignthespouavch Trchinhof arecopeshbevethired In mahigrac
5. Lower gear ratios were selected for 1st – 4th gear to provide additional low-end torque to aid in towing capabilities. High-end gearing, 5th and 6th gear, have been chosen to optimize engine efficiency during highway driving. The placement of the transmission in the Wisconsin FutureTruck is displayed in the packaging diagram (figure 4). The gear selector and clutch are typical of those found in conventional vehicles. However, slight modifications have been made to the transmission to improve functionality in our design. The stock shifting rods have
Figure 6. Exploded Pro-E model of custom transfer case and custom in-line electric motor.
Table 4. Engine Build Details for the 2.5L Td5 Land Rover Engine.
Engine Component Specification Rated Power 104 kW at 4200 rpm Maximum Torque 340 Nm @ 1950 rpm Speed Range 1000 – 4800 rpm Bore 90.47 mm Stroke 97.0 mm Displacement 2495 cc Control System Land Rover ECM
4
addition to it’s favorable torque characteristics, the 5-linder, turbo-charged, common rail, compression ition direct-injection engine also has a maximum rmal efficiency of 42%. A complete list of the
ecifications are shown in Table 4. This engine solved r torque problems, met our design goals, and was ailable. For these reasons, the 2.5L LandRover was osen for the Wisconsin FutureTruck.
ansmission – The Wisconsin FutureTruck team has osen to use a manual transmission because of the erent high efficiency, low mass, and control flexibility this type of transmission. Since manual transmission not desired by all drivers, a hydraulic auto-shift unit
uld be integrated into the drivetrain to simulate the rformance of an automatic transmission. The auto-ift manual transmission is a proven design, which has en incorporated into many high-end European hicles. The UW FutureTruck team chose not to use s auto-shifting with a standard manual transmission to uce drivetrain complexity.
our 2001 FutureTruck, a 6-speed Richmond Gear nual transmission is used. This is a light-weight, h-torque performance transmission designed for ing applications. The gear ratios are shown in Table
been replaced with shifting cables to allow more for reliable shifting. The reverse gear, located in the tailstock of the transmission, was removed to shorten the drivetrain and to reduce mass, inertia, and complexity. Selecting reverse with the shifter leaves the transmission in neutral and signals the computer to command a reverse torque to the motor. This is acceptable because reverse is desired only for low speeds.
Table 5. Gear Ratios for Richmond Transmission.
Gear Ratio 1st 4.41:1 2nd 2.75:1 3rd 2.13:1 4th 1.74:1 5th 1:1 6th 0.76:1
Differential 4.10:1
Hybrid Transfer Case – In the 2000 Wisconsin FutureTruck, the stock transfer case was replaced with a student-designed unit that integrated a RWD/4WD transfer case and a two-speed electric motor gearbox. The gearbox proved to be effective for power distribution, however there were significant NVH issues,

5
which are difficult to control on prototype gears. The team also suspected that there were substantial power losses due to the numerous gear meshes within the transfercase. These shortcomings prompted a redesign. To quantify power losses of the 2000 FutureTruck hybrid transfercase, the electric motor was used to spin the rear axle through the gearbox. The power required to maintain steady-state was measured at various speeds with the 2000 hybrid transfercase in both high-range and low range. Figure 7 shows the power dissipated by the gearbox, driveshaft, and rear axle. The UW FutureTruck team decided that these losses were significant enough to reconsider the design of the hybrid transfercase.
For 2001, the transfer case and motor coupling design were completely rethought. After multiple design iterations, the team decided that a through-shaft motor would simplify the transfercase, reduce gear mesh losses and allow for robust integration (see figure 6). With the addition of the though-shaft motor, the need for a speed reducing motor coupling device has been eliminated. The front wheels are driven by a student-designed, single-speed transfer case, which uses a Borg-Warner ‘silent chain’. The chain design completely eliminates gear noise. Chain engagement is accomplished by a brass synchromesh assembly found in many manual transmissions. The synchronizer is engaged using a Bimba pneumatic cylinder controlled by the hybrid control computer. The computer ensures that 4WD is only engaged at appropriately low speeds. Weighing only 18 Kg this design is significantly lighter than the stock transfer case (35.8 Kg) and reduces driveline losses. The single speed transfercase completely disengages the front-end drivetrain (front differential and half shafts), thereby reducing rolling vehicle losses. Fuel Tank – A single fuel tank, holding 64.4L, is needed. This will provide a “tank” range of 764 km (475 mi). The
tank is constructed from 1.02 mm thick 5052 H32 aluminum and TIG-welded at the seams. The tank uses the stock Land Rover in-line lift pump/filter to transport the fuel to the engine. The fuel system is compatible with both regular diesel fuel and biodiesel. Emissions Green House Gas – Reducing GHG is a global initiative and a primary goal of the FutureTruck competition. The EPA has developed a standardized method to quantify the green house gas index (GHGI), which uses the following formula: (7) GHGI = CO2 + 21*CH4 + 310*N2O For any IC Engine, CO2, the dominant GHGI contributor, is directly related to the quantity of fuel consumed. Once a fuel is determined, the only way to minimize CO2 emissions from an engine is to maximize fuel economy. Based on these factors, CIDI was chosen, as it offers the highest thermal efficiency of any internal combustion engine. The other technique for reducing GHG is to use an alternative fuel source, which has a large GHG credit. The GHG credit accounts for CO2 recaptured annually into soybeans, corn, or rape seed used in producing the fuel. For CIDI applications, the only renewable alternative is a blend of 20% biodiesel. Since biodiesel is an oxygenated fuel, there is a slight energy density penalty. For a typical soybean based B-20 blend [8], the engine power and fuel density will be reduced by 1.4% while decreasing GHG by 15%. For the aforementioned reasons, the Moollennium will be a grain-fed hybrid SUV. Even though CH4 and N2O are heavily weighted in the GHGI metric, CIDI emissions data shows that together they are responsible for only 1.54% of the total GHGI [9]. The passive catalysts (see figure 8) further reduce CH4 emissions by 70%, cutting the GHGI by an additional 0.50%. CIDI engines do not produce large amounts of N2O, and no further production should be created by the exhaust catalyst since oxygen is abundant.
After-Treatment – Historically, exhaust after-treatment has been developed for SI engines. These engines use closed-loop controls to keep the air/fuel ratio stoichiometric, in a region where the 3-way catalyst technology operates effectively. If the engine were operated lean, the nitric oxide (NOx) conversion efficiency would drop drastically while rich combustion would cause excessive carbon monoxide (CO) and hydrocarbon (HC) emissions. In the case of CI engines, the engine is always operated lean, so 3-way catalyst technology is not applicable.
A platinum loaded catalyst from Degussa was chosen for the vehicle. This passive catalyst is mainly designed to reduce HC and CO emissions, but it also reduces
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
0.2
0.4
0.6
0.8
1.0
1.2
1.4
Low Range
High Range
Pow
er [k
W]
Speed [km/hr] Figure 7. Driveline losses due to the gear losses,
driveshaft, rear differential.

6
particulate and NOx emissions. The efficiency of the catalyst varies with platinum loading as shown in figure 6. Of the four different catalysts tested, a catalyst loading of 20 g / ft3 was chosen, to maximize NOx reduction. Testing has shown that CO, HC, and particulate levels are all below ULEV standards while NOx has been our constraining effluent [2]. Degussa has supplied a regenerative NOx trap. The trap has a peak NOx reduction of 90%. A small injection of fuel is expelled into the exhaust stream (2-3% fuel economy penalty), to regenerate the NOx trap.
Electric Drive System Motor/Inverter – Chassis dynamometer testing performed on the Aluminum Cow [3] with both an AC induction motor and permanent magnet motor, showed that the permanent magnet motor was responsible for a 16.4% decrease in fuel economy. Since the UW FutureTruck team uses a mild hybrid strategy, the electric motor is only utilized 10-15% of the time and the efficiency gains of the permanent magnet motor are smaller than the corresponding drag losses, when compared to an inductive motor. The dynamometer results from the Aluminum Cow conclude that an induction motor is the best choice for a mild hybrid like the Moollennium. In the Aluminum Cow, the electric motor was connected to the driveline and geared so that maximum motor speed would occur at 145 km/hr. Under 16 km/hr, the electric motor could not supply enough reverse torque to fully capture the vehicle’s momentum during typical decelerations. A 2-speed gearbox was studied and manufactured for FutureTruck 2000. Theoretically, the 2-speed gearbox would capture 16% more regenerative braking energy during deceleration from 32 km/hr than a single 2:1 speed gearbox. However, the 2-speed gearbox was experimentally determined to absorb 38W per km/hr.
The Wisconsin team, working with Marathon Electric created a custom wound through-shaft, axle speed, AC
induction electric motor that met the design specifications of the optimized Moollennium. Using available motor laminates, various stack lengths were modeled to determine the electric motor with the maximum power to weight ratio. In addition to the axle speed motors depicted in figure 9, appropriate laminates were determined for a 2X and 3X axle speed motor. A motor evaluation of the three speed ranges is summarized in Table 6.
Although the high rpm motors are lighter, expensive, complicated gear reductions are required. In addition, the rotating inertia of the higher speed motors is approximately three times greater than the axle speed motor. Overall, the axle speed motor will create a highly manufacturable, consumer acceptable, hybrid SUV. The Marathon Electric/ UW AC induction through-shaft motor has a peak power output of 68.5 kW (battery limited) and a maximum torque of 478 N-m. The motor weighs 109 kg, and operates at a peak efficiency of 95%. The electric motor size was determined based on the speed and torque curves for several motor stack sizes, as seen in figure 9. The Moollennium’s motor has overall dimensions of 318 mm in diameter and 292 mm in length, the motor stack is shown in figure 10. The
10 20 30 40 50 60 700
10
20
30
40
50
60
70
80
90
100
Catalyst Loading Hydrocarbons
Carbon Monoxide
Nitric Oxides
Particulates
Con
vers
ion
Effic
ienc
y (%
)
Catalyst Loading (g / ft3)
Figure 8. Platinum loading levels vs. conversion efficiency for production catalyst.
Table 6. Evaluation of electric motor Driveshaft
Speed Motor
Weight only
Rotating Inertia @ 90 kph
Noise Vibration
Harshness
System Cost
3 X motor 61.3 kg 6878 J Poor High
2 X motor 93.9 kg 7307 J Poor Med
1 X motor 102 kg 2320 J Good Low
0 500 1000 1500 2000 2500 3000
150
200
250
300
350
400
450
500
Mot
or T
orqu
e ( N
-m )
Motor Speed ( rpm )
Custom 6" stack - Theoretical Custom 6" stack - Actual Custom 8" stack Y553 6.75" stack - 11" OD
Figure 9. Electric Motor stack size comparison.

7
motor had the best power and rotating inertia characteristics. The Solectria DMOC445 motor controller/inverter has been tuned for operation with the custom Marathon electric motor. The DMOC445 is an upgrade from the UMOC440 used in FutureTruck 2000. The DMOC has added computational power by using a digital signal processor, and also has trenchgate IGBT’s which allow for longer durations of ‘peak’ power. This air-cooled controller is 98% efficient, weighs 16 kg, and includes large cooling fins and fans. The control unit is rated for an input voltage of 350 V and has a 240 Arms limit.
Battery – The optimized energy storage system for the Moollennium consists of 1200 sub-C Nickel Metal Hydride (NiMH) cells. When compared to spiral wound lead acid batteries, the nickel-based system was selected for their superior cycling limits. Commercially, the NiMH technology will cost approximately $1000/kW-hr versus $100/kW-hr for lead-acid technology. Since
NiMH batteries will survive 10-25 times longer, it is the superior choice for a factory-serviceable only battery pack.
NcrvfcNmhhbT IfaPv
Figure 10. Custom motor stator.
0 0.5 1 1.5 2 2.50.6
0.7
0.8
0.9
1
1.1
1.2
1.3NiCadNiMH
Figure 11. Plot of voltage versus time for NiMH and
NiCad sub-C batteries.
F
Table 7. Comparison of NiCd in AIV and NiMH in SUV.
Battery Characteristics
1999 AIV
2000 SUV
2001 SUV
Battery Mass [kg] 53 105 72
Bat. Box Mass [kg] 6 10 8 Voltage [V] 286 288 288 Capacity [A-h] 8.0 15.4 11.3 Energy [kW-h] 2.3 4.44 3.17 Power [kW] +/- 24 +78 / - +100 / -
iMH batteries from Moltech Power Systems are ompletely enclosed, require no maintenance, and are ecyclable. For a comparison between NiMH and NiCd, oltage versus time for 40-amp discharge, is shown in igure 11. When comparing the NiMH cells to the NiCd ells that were used in past vehicles at UW-Madison, the iMH are more power dense and have little or no emory problems. NiMH cells are also much less
azardous to the environment, since they do not contain eavy metals. A battery configuration comparison etween the 1999, 2000, and 2001 vehicles is shown in able 7.
n order to gain a more balanced bi-directional power low description of the battery, more applicable to use in hybrid vehicle, NiMH cells were tested according to NGV testing standards [5]. The cell's open circuit oltage, Voc, was calculated from a series of pulse tests
62 63
0 20 40 60 80 1000.8
0.9
1.0
1.1
Volta
ge [x
Vn]
Terminal Voltage and Current vs. Time
-6-4-20246
Cur
rent
[pu]
time [sec]
120
0 20 40 60 80 100 120
igure 12. Per unit terminal voltage and current vs. time for several states of charge for a sample NiMH system. (Vbase=1.336V/cell, Ibase=3.0 Amps or Ah capacity).

8
vs. State of Charge (SOC). The pulse tests were elongated to 30 seconds from the specified test procedure of 18-second discharge and 2-second peak charge power. The power pulse test trajectories for several SOC levels are shown in figure 12 (80%, 60%, 40%, and 20%). This figure shows the typical voltage variation per battery, as well as the voltage swings to be expected during assist and regenerative battery utilization. Additionally, these tests confirm the power density of the NiMH batteries, given the tested variation in battery voltage. During a FTP dynamometer cycle, individual string currents and the pack voltage were monitored in a attempt to quantify the “current-sharing” abilities of a parallel string pack. In figure 13, four individual current levels are displayed for a snapshot of the ‘hot 505’ cycle. The pack voltage varies with the current and the four individual strings each experienced almost identical current loads. Balanced current sharing will ensure the longevity and performance of the hybrid pack. The battery pack used in the 2001 FutureTruck is optimized for the electric drive system and has been designed to fit underneath the truck, inside of the frame rails (see figure 4). The completed battery pack is 1.1 m x 0.32 m x 0.20 m. The battery pack consists of 5 parallel strings of 10 sticks containing 24 cells each. This is a decrease from 7 parallel strings used in the pack for FutureTruck 2000. The battery packaging and cooling has been modeled using the computational fluid dynamic modeling program, FLUENT. The results of this model have determined the battery pack design, including plenums that ensure uniform cooling
throughout. Battery strings are supported by five high-density polyethylene supports. A Solid Works model of the battery box is shown in figure 14. A polycarbonate shell encloses the batteries. The plenums serve two purposes: protecting the bottom from road debris and uniformly cooling the pack. The goal of battery temperature control is to maintain each battery string at a constant and manageable
temperature. The cooling of the batteries is achieved through forced air convection. Two plenums sandwich
the bflow The unifothe plenensutempexpebeenman
Highbox convsystevoltabattedetewill comcons“pacbeenadvaelecTherstrucleadteam
200
210
220
230
240
250
260
270
280
290
300
210 220 230 240 250 260 270 280-10
-8
-6
-4
-2
0
2
4
6
8
10
12
Pack Voltage
Pack Voltage (V)
String 1 String 2 String 3 String 4St
ring
Cur
rent
(A)
Time (s) Figure 13. Pack voltage and individual string’s current
levels in a hybrid vehicle being tested on the FTP 505 cycle
Figu
Figu
re 14. Solid Works model showing support
structure of battery pack.
attery pack, as seen in figure 14, to adjust the airfor equal cooling over the entire length of the strings plenums create a uniform air pressure drop and rm air flow across the entire pack. Figure 15 shows FLUENT simulations of the battery pack with aim ums. Battery performance and longevity are red by monitoring string current, voltage and erature for problems. Because the battery pack is a rimental unit, an emergency cooling system has added to the Moollennium in case of battery agement failure, see appendix D for more details.
Voltage Interface - The High Voltage Interface (HVI) houses the power electronics, Vicor DC-DC erter, and sensors for the vehicle’s high voltage m. Specifically, the HVI monitors string current, ge, and temperature for an anomaly to ensure ry performance and longevity. If any anomalies are cted, hybrid operation will be disabled and a warning be displayed. In previous UW vehicles, these ponents were integrated into the battery pack, which olidated all components into one high voltage kage.” For the 2001 UW FutureTruck, the HVI has separated from the battery pack. A major ntage of the UW HVI design is that it allows the
trical separation of the five parallel battery strings. e has been concern in the industry that parallel ture packs can experience recirculating currents,
ing to pack damage. Although the UW FutureTruck has not experienced this phenomenon in our three
re 15. Cooling air temperature gradient results from FLUENT modeling.

9
plus years of experience with sub-C sized nickel based cells, the HVI has been designed to eliminate these concerns. Simply unplugging a connector between the battery pack and HVI will separate the battery strings. This also acts as an emergency disconnect. Computer – The Wisconsin FutureTruck team strives to incorporate a flexible, yet robust, control system. The control strategy is run on a custom-built computer system consisting of a Computer Dynamics single-board Pentium machine. The computer's Micro Industries data acquisition boards are connected to a custom-designed interface, which collects input signals from sensors throughout the vehicle and distributes control signals to actuators and other vehicle components. The data acquisition boards have a maximum capability of 48 digital inputs and outputs, 32 analog inputs, 16 analog outputs and 20 relay outputs. By using a standard PC architecture, the team can program in a common language (C/C++) while remaining flexible to hardware and software improvements. The UW control strategy has a single mode of operation. This results in a FutureTruck that operates in a similar manner to a conventional SUV. There are no added modes, switches, pedals, or dials. The control strategy is designed as a state machine, with three states. By developing the control strategy as a finite state machine, the software is restricted to run in only one state at a time. Since the current vehicle state can always be determined, each state can be tested, debugged, and tuned separately. Each state is reviewed in the following sections. The UW team uses a simple state of charge (SOC) based on pack voltage averaged over the past 90 seconds. This averages out the transient voltages from assist and regen, giving a good running estimate of the SOC. This lagging SOC indicator is well suited to the wide hysterisis bands of our control strategy. State 1: Engine-Only – The first state is engine-only. In this state, the vehicle operates without using the electric motor. This state is used when the clutch is depressed, or when the SUV is in neutral. In this state, the accelerator input goes directly to the engine, and the motor provides no torque. State 2: Regenerative Braking – The second state is the regenerative braking state. Regenerative braking (regen) is the act of using the mechanical energy from the wheels to drive the motor, generating electricity for storage in the battery. This process recharges the battery while decreasing the vehicle speed. The vehicle goes into the regenerative braking state only if the brake pedal is depressed and the battery pack is not fully charged. The brake pedal travel is split into two portions as seen in figure 16. The first 2 cm (0.75in) of travel does not engage the hydraulic brakes - only
regenerative braking is used. After 2 cm, regenerative braking is fully saturated and the stock hydraulic brakes engage to help slow the vehicle. This allows the driver to regenerate large amounts of energy during braking, which increases fuel economy in stop-and-go driving. At the same time the ability to brake hard when needed is retained. A hydraulic piston (patented by the UW team) is attached to the end of the existing master cylinder. As the brake pedal is depressed, the brake fluid forces this hydraulic piston to compress a spring. A brake line pressure of 100 kPa (14.5 psi) is needed to initiate the movement of the piston and a mechanical stop limits the piston’s stroke at a pressure of 350 kPa (see figure 15). The control computer senses the pedal position using a rotary potentiometer mounted on the pedal. After the piston contacts the stop, the hydraulic braking system operates normally. The 350 kPa preload causes a very smooth transition between the regenerative and conventional braking systems.
State 3: HEV – The HEV state is the third and most common state in the control strategy. This state contains the SOC regulating control code, which manages the battery voltage as previously described. Safety is ensured by range checking all inputs and outputs. If a value entering or leaving the computer is too low or too high the computer will adjust the value to the closest bound, or, if the values are far out of range, indicating a serious hardware error the control strategy will disable the electric motor to prevent hazardous operation. To further improve fuel economy in city driving, the control strategy implements intermittent engine operation. When the driver does not need the engine (for example, when coasting or stopped at a red light),
0 10 20 30 40 50 60-10
0
10
20
30
40
50
60
70
80
90
100
110
ConventionalBraking Begins
Brake SwitchActivated
Regen. Begins
Brak
ing
Syst
em C
apac
ity A
pplie
d (%
)
Brake Pedal Depression (mm)
Conventional Braking System Regenerative Braking System
Figure 16. The application of the regenerative and
conventional braking systems in the vehicle.

the control strategy shuts the engine down. The engine is automatically restarted when it is needed again. Before implementing the intermittent engine operation, modal CO2 emissions from FTP cycles were compared. Figure 17 shows a snapshot comparison of the instantaneous CO2 emissions from normal and intermittent engine operation. Between 120 and 160 seconds of the ‘hot 505’ cycle, the engine would ordinarily be at idle (0.3% CO2 emissions). With intermittent engine operation, the engine is shut down during the period, so there are no CO2 emissions. When the engine is restarted at 162 seconds, no CO2 spike is observed as the engine is restarted. The intermittent engine operation was implemented on the Aluminum Cow and demonstrated a 3-5% increase in fuel economy.
Component Summary Table 9 provides a summary of the mechanical and electrical components used in the Moollennium. These components were chosen from the best available. The combined drivetrain power is 182 kW (244hp), comparable to the stock Suburban power output of 212.5 kW (285hp).
AUXILIARY SYSTEMS
For the 2001 Wisconsin FutureTruck a number of the parasitic loads were removed from the engine and replaced with electrically driven accessories. Air Conditioning – A conventional R134a refrigeration system is used to cool the vehicle cabin. Thermal-electric coolers were investigated, however they are four times less efficient than a vapor-compression system and the relatively small battery pack makes operation of an electrically driven compressor impractical. When the air conditioning system is activated, intermittent engine operation is deactivated so that continuous cooling can be supplied to passengers. In order to ensure adequate cooling, a two-speed electric radiator fan operates in the 'low' position, drawing air across the condenser while the air conditioning is activated. 12-Volt System – Several different 12-volt system configurations were considered for the truck, they are listed in Table 10. The configurations considered involve a different combination of DC-DC converters (Lambda, Vicor) and alternators. Systems were evaluated with regards to weight, performance and power conversion efficiency. The system efficiency was calculated by taking the product of the electric motor, motor controller, HV battery and DC-DC converter efficiencies. The final choice for the Moollennium consists of a 85 A alternator and a 750 watt Vicor DC-DC converter. This option was chosen because it was the lightest alternative, met the necessary design requirements and provided acceptable efficiency. In normal operation, the alternator will meet all 12-volt system demands. The 5.9 kg alternator will operate near peak efficiency and if additional power is needed, the DC-DC converter will begin to supply power as the pack voltage droops. In addition, the DC-DC converter will power the 12-volt system when the engine is shut-off in intermittent engine operation mode and the engine is shut down. The lightweight Inspiria spiral wound – 4.8 A-hr lead acid starter battery and can deliver 2000 A to start the engine.
Power Steering – A TRW EPHS (electric powered hydraulic steering) pump has been integrated into the
Table 10. 12 Volt System Options Options LandRover
Alternator Small
Alternator and Vicor
Lamba
Max Current [A]
85 145 112
Efficiency [%] 85 85 90 Weight [kg] 5.9 9.5 12 Cooling None Forced Air Liquid Advantages Reliable Lightweight No Engine
Losses Disadvantages Can’t turn engine
off Decrease
Engine Eff. Battery
Pack Drain
CO2 Emissions
0
1
2
3
4
5
100 110 120 130 140 150 160 170 180Time (sec.)
CO2
(%)
Engine On (Hot & EGR)Engine Off (Hot & EGR)
Figure 17. Comparison of modal CO2 emission data
recorded during a ‘Hot 505’ FTP chassis dynamometer experiment.
Table 9. Moollennium Component Summary.
Component Manufacturer Rating
Engine
Land Rover (2.5L DICI)
104 kW @ 4000 rpm 340 N-m @ 1950
Transmission Richmond Gear 6-speed 4.10:1 Diff. Ratio
Motor
Marathon Electric and
UW-Madison (AC induction)
68.5 kW peak 30 kW continuous
Inverter
Solectria (DMOC 440F)
78 kW ≤ 240 Arms
Battery Moltech Power +100 kW / -63 kW
10
Moollennium. Eliminating belts, pulleys and all direct connection to the engine, this system combines an
Systems (NiMH) 3.09 kWhr

11
electric motor, pump, electronic control unit and reservoir into one unit. The flow rate of this unit is between 3 L/min and 6.3 L/min, matching the requirements of the stock recirculating ball steering. The unit runs off of 12-volt system, and draws 13-85 Amps. This unit ensures safe operation when the engine is shut off. Vacuum/ Air Compressor – An electric powered pump has been supplied by Thomas Industries. Electric solenoid switches are used to operate the pump as a vacuum pump or air compressor. The vacuum pump has been removed from the engine to reduce parasitic losses and to ensure power assisted braking during engine stop/start. A control circuit is used to determine the operation mode of the pump. Since vacuum for the power brakes is the most important function, the fail-safe mode of the valves are vacuum. Air tank pressure and vacuum sensors (binary switches) will activate the pump when either crosses its pressure threshold. In the occurrence that both compressed air and vacuum are requested simultaneously, the vacuum mode will receive priority to ensure consistent and adequate braking. The compressed air is stored in the air tank and used for the ride height adjustment and the 4-wheel drive actuation device.
ALTERNATIVE ENERGIES
Solar Array – Solar arrays are installed on the roof of the Moollennium. Two separate arrays are being connected to supply a maximum of 150 watts to the 12-volt system. Currently, solar cells are cost prohibitive for mass production, however they are being used as a demonstration of future technology.
WEIGHT REDUCTION
In an effort to reduce the weight of the vehicle, many components were redesigned using lightweight materials, such as aluminum or replaced with lighter stock components from other vehicles. According to the Aluminum Industry a 20 percent weight reduction will increase fuel economy 12 to 16 percent. An aluminum-intensive vehicle would save 500 to 700 gallons (2,270to 3,180 liters) of fuel, worth about $800 in the U.S., and three times that in Europe and Japan, over its lifetime. A more complete description of the benefits and uses of
aluminum can be found in Appendix C. Frame – Tower Automotive and the University of Wisconsin cooperatively developed an aluminum frame for the 2000 Chevrolet Suburban. Over 40 components were stamped using the 1999 GMT 430 frame tooling. 6061-T0 aluminum was stamped and assembled using a Tungsten Inert Gas (TIG) welder. For FutureTruck 2000, the aluminum frame was patterned after the GMT 430, except for matching the body mount locations for the 2000 Suburban. A second-generation aluminum frame was constructed for FutureTruck 2001. This new frame mimics the 2000 Suburban GMT 830 steel frame geometry. Although the GMT 430 frame was successfully modified to fit the 2000 Suburban in FutureTruck 2000, the body mount brackets became ‘too’ long and the overall stiffness was compromised. The new frame minimized the length of the body mounts and increased the overall stiffness of the vehicle, while at the same time providing more hybrid packing volume. The 2001 aluminum frame was completely welded prior to heat-treating to the T6 state. Coated bolts and rivet nuts were used to eliminate galvanic reactions at dissimilar metal interfaces. To ensure safety, horn crush tests were performed on an aluminum and steel version of the 1999 GMT 430. Compared to the steel, the aluminum section absorbed 80% of the energy with 75% of the peak load. To increase energy absorption, a 12 cm crumple section was added to the front of the GMT 430 aluminum frame rails. The extension was also needed to account for a 12 cm shift between the 2000 Suburban body and the 1999 frame. A second horn crush test was performed with the crumple section attached, which doubled the total deflection, and absorbed 20% more energy than a stock GMT 430 steel frame.
Figure 18. Aluminum Crush Zones
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5
136 %
100 %
Reinforced Aluminum80 %
120 %
330%
Aluminum with UW 2001 Crumple Section
Aluminum with UW 2000 Crumple Section
Steel - GMT 430
Steel - GMT 830
Normalized Energy Absorption(compared to Steel GMT 430)
Figure 19. Energy absorption comparison chart
showing new crush zones impact.

In 2001, a new crush zone was designed to increase its energy absorption. A 5000 series thin wall tube was mounted in the center of the existing crumple section. 314 N/m3 of foam was added to the center of the tube to guarantee axial yielding, a cut-away of a crushed energy absorption section is shown in figure 18. For FutureTruck 2001, the crush zones were constructed with a secondary crush member to increase peak load. The improved aluminum crush zone absorbed 36% more energy than its steel counterpart (figure 19). In the steel GMT 430 frame, the back 2/3 of the frame utilizes an open C-channel design. When constructing the aluminum frame, two C-channels were welded together to form completely boxed side rails. By ‘boxing’ the frame rails, the bending rigidity is increased, while welded cross members enhanced torsional rigidity. The solid model for the FutureTruck 2000 and 2001 aluminum frame is shown in figure 20. Figure 20a depicts the 2001 aluminum frame while the modified 2000 aluminum frame is shown in figure 20b. Notice that the 2001 aluminum frame is 5 cm wider than the 2000 frame at the A-pillar. The 2001 aluminum frame was held to a constant width in the rear frame section while the 2000 aluminum frame narrows an additional 10 cm. The steel GMT 830 is narrower at the back axle to accommodate the rear suspension coil springs. Because we are utilizing custom fiberglass leaf springs, the frame was modified so the leaf springs mount directly under the rear frame rails – eliminating torsional loads on the frame. To ensure the integrity of the 2001 aluminium frame, a complete FEA of the frame was performed using NASTRAN software on Tower Automotive’s supercomputer. A comparison of the NASTRAN Modal Analysis of the 2000 aluminum frame, 2001 aluminum frame, and the GMT 420 steel frame are listed in table 11. The 2000 aluminum frame matched the lateral bending of the steel frame, while the 2001 aluminum frame experienced a 50% decrease due to its 150 mm
compensate for this difference. The boxed side rails utilized in both aluminum frames are responsible for a 25% increase in torsional rigidity and equivalent vertical bending with compared to the steel frame. Spindle/Rotor –The front spindles were student designed and fabricated with 7075-T6 aluminum. Using a “cookie-cutter” design, this design allows the brake rotors to transmit shear forces directly from the brake rotor to the spindle, rather than to the wheel studs (see figure 21). The stock steel wheel bearing, race, and cast iron upright were preserved. An auto-locking hub mechanism from a Ford Ranger was integrated into the new design to allow the front drivetrain to disengage completely at the hubs. By disengaging the hubs when not in 4-wheel drive, the front wheel drive components are completely isolated and all spinning losses from the front driveshafts are eliminated.
Figure 20a. NASTRAN solid models of the 2001 aluminum frames built for the Moollennium
Figure 20b. NASTRAN solid models of the 2000 aluminum frames built for the Moollennium
F
wider rear frame section – the shorter body mounts will Table 11. Results from Modal Analysis of the
Aluminum Frame.
Mode 2000
Aluminum Frame
GMT 420 Steel Frame
2001 Aluminum
Frame
Torsion 10.62 Hz 8.2 Hz 10.29 Hz
Vertical Bend
26.39 Hz 23.8 Hz 23.69 Hz
Lateral Bend
28.26 Hz 29.9 Hz 15.92 Hz
Mass 115 kg 242.7 kg 113.9 kg
includes
12 trailer hitch
igure 21. “Cookie Cutter” design of the front spindle
and brake rotor.

13
Figure 22 illustrates the maximum stress predicted in the aluminum spindle under the worst-case scenario (of the entire vehicle load being applied to one wheel, as in an
off-road course). The stress is within acceptable limits. The weight reduction due to this redesign is 4.5 kg per front wheel. Rear Axle – The GMT 430 steel frame utilized a solid-axle with leaf-spring suspension. To minimize the
complexity of the aluminum frame, it was decided to stay with a leaf spring design – weight reduction options were investigated. Research revealed that the Jeep Grand Cherokee used a cast aluminum differential housing and a 210 mm Dana rear carrier (assembly). Axle tubes were fabricated from DOM 4130 chromoly tubing and the original brakes were remounted.
Leaf Springs – The original leaf springs weighed approximately 64 kg each, replacement fiberglass leaf springs weighing 8 kg were fabricated. These leaf springs have a spring constant of 36.5 kN/m while the stock steel leaf springs have a spring constant of 51 kN/m first stage and 80 kN/m second stage. As discussed in the frame section, the leaf springs mount directly under the rear section of the frame, and utilize a ‘rear’ slider system instead of the conventional shackle mounts. This style of leaf spring was designed for a Ford Explorer by A.O. Smith Corporation. To augment the leaf springs, pneumatic cylinders automatically maintain the vehicle at its original ride height. A-Arms – The stock 2000 Suburban upper a-arms are forged steel. The a-arms were redesigned using 4130 chromoly tubing attached to a 1020 carbon steel ‘donut’ at the ball joint location. The tubes were TIG welded with custom elastomers and stock ball joints. As can be seen in figure 23, an FEA analysis of the a-arm showed that a loading of 680 kg. The maximum stress and strain were within the acceptable limits of the materials used. The weight savings on each upper a-arm was 1.4 kg. Torsion Bars – To accommodate the through-shaft electric motor design, the torsion bar cross-member was moved forward approximately 381 mm-the exact location of the transmission cross-member. To reduce components, a dual purpose cross-member was designed to support the powertrain and ‘hold’ the torsion bars. Because the torsion bars were shortened to 67% of its original length (1321 mm), a high strength material with less rigidity was needed-titanium. Titanium has a 60% lower modulus of elasticity than steel (it will twist 1.66 times further than steel for identical geometry) – a perfect match to the length reduction. TIMET supplied a patented low cost, high-strength Beta titanium alloy. The LCB alloy is being utilized for coil-spring applications and its ultimate strength is 1233 MPa (see appendix D for titanium properties). Titanium and steel, unlike aluminum, exhibit similar and predictable fatigue limits. The Moollennium will be utilizing 940 mm long, 35.6 mm diameter, 4.12 kg titanium torsion bars – 5.31 kg lighter than the original steel torsion bars. Front Differential – The stock differential was replaced with a 4.10:1 Dana differential designed for a ½ ton vehicle. The front differential, while capable of carrying the full torque of the hybrid drivetrain, reduced the vehicle weight by 18 kg. The switch to a smaller differential also allowed the engine to be lowered in the engine compartment, thereby lowering the center of mass of the Suburban and simplifying engine installation. Carbon Fiber Hood – The hood is a large, heavy, non-structural item. The best lightweight and manufacturable hood material for the Moollennium would have been aluminum. However, it is difficult to obtain access to the
Figure 22. ANSYS analysis of spindle and rotor, with
maximum and minimum stresses shownfor a load representing all of the vehicleweight on one wheel.
Figure 23. ANSYS FEA on redesigned upper A-
arm. Shown are maximum andminimum stresses incurred along withtheir respective locations as a result of a680 kg point load at the ball jointplacement surface.

14
required stamping dies. For these reasons, the UW FutureTruck Team decided to manufacture a prototype carbon fiber hood, saving 16 kg. Aluminum Bumpers – Hydro Raufoss supplied an aluminum extruded bumper beam that was developed for Isuzu delivery trucks. Because aluminum easily scratches versus chrome, the Yukon Denali vinyl bumper fascias were used for dent and scratch protection in addition to creating a unique body style. A total of 30 kg was eliminated from the vehicle. Titanium Exhaust – Since titanium is almost impervious to oxidation, thinner walled exhaust tubing can be utilized to optimize weight reduction. Titanium exhaust tube utilizes a 1.25 mm wall thickness while steel uses a 2.10 mm wall thickness – a 64% weight reduction per meter of exhaust tubing. A total of 10 kg was eliminated from the vehicle. Aluminum Trailer Hitch – The trailer hitch has been integrated into the aluminum frame to reduce weight and stiffen the aluminum frame. The weight of the trailer hitch has been reduced by 7.5 kg. To reduce shear stress due to the receiver pin, an Al Metals material was selected. The material is aluminum and steel plate which has been press bonded. The steel increased the shear capability of the pin hole, while the aluminum
allowed it to be welded to the rest of the frame. The trailer hitch cross beam also serves as the air tank for the air suspension system, eliminating the need for a separate air tank. LTV CopperWeld – Copper-clad aluminum (CCA) wire is a bimetallic wire with a copper cladding concentrically covering an aluminum core. The copper and aluminum are metallurgically bonded at their interface. Compared to solid copper, the CCA is 65 % as conductive and reduces weight by 37%. Matching conductivity increases the wire size and produces a 50% overall weight reduction. In the Moollennium, CCA is utilized for starter, glow plug and fuse box wiring. The estimated weight reduction is 4.5 kg.
Table 13. Summary of Materials in the
Material % in PNGV by Mass
% in UWby Mass
Ferrous Metals 24.0 51.0 Aluminum 37.0 15.3
Magnesium 4.3 0.04 Titanium 0.6 0.6 Plastic 13.0 11.8 Other 11.1 8.7
Rubber 6.0 7.8 Glass 1.8 3.9 Lexan 1.5 0.4
Carbon Fiber 0.3 0.4 Total Mass
Table 12. Summary of Major Weight Reduction Components.
Component Stock Moollennium
Frame 243 kg 114 kg
Suspension 221 kg 168 kg
Drive train 408 kg 392 kg
Other 1723 1639
Total Mass 2595 kg 2313 kg
Aluminum Driveshafts – Aluminum driveshafts will be used to minimize driveline weight and rotating inertia. Dana corporation will assemble Alcoa supplied tubing and forgings to create our aluminum driveshafts. The rear driveshaft will use a 102 mm aluminum tube and a 1350 series u-joint (standard equipment on the 2500 series Suburban) while the front will utilize a 76.2 mm tube and a 1310 series u-joint. The estimated weight reduction will total 10 kg for the two driveshafts. Weight Reduction Summary – Table 12 summarizes the weight reduction achieved in the Moollennium. Table 13 summarizes the material content of the Moollennium compared to PNGV vehicles.
DRAG REDUCTION
As shown in Equation 4 of the Vehicle Energy Consumption section, the second most significant factor which contributes to the vehicle’s power loss is aerodynamic drag. This loss is dependent on several factors, however frontal area profile, drag coefficient, and rolling resistance are the only factors that can be influenced by design. The following steps were taken to reduce the Moollennium’s frontal area profile, drag coefficient, and coefficient of rolling resistance.
Moollennium versus a PNGV vehicle. PNGV Mass (kg) UW Mass (kg)
217.8 1179.7 332.5 353.9
39 0.9 5 14.0
122.0 272.2 101 2.1 55.8 181 16.3 90.7 13.6 9.1 3.6 10.0 907 2314

15
Ride Height Adjustment – An aerodynamic study of the vehicle was performed via wind tunnel testing. Several different 1/25-scale Chevrolet Suburban models were assembled. A wind tunnel at the University of Wisconsin was used to perform the study. It was capable of producing wind speeds up to 45 meters per second (100 mph). The cross-sectional area of the tunnel's measurement section was approximately 900 cm2. A plate was installed parallel to the airflow to simulate ground effects. An instrumented arm extended to the bottom of the test section to measure drag and lift forces on the vehicle. A pitot tube measured the air velocity in the test section. Wind tunnel measurements predict an 8% decrease in vehicle drag by lowering the vehicle 101.6 mm at highway speeds. A FLUENT model (figure 24) was also used to predict a similar change in drag force. Because the wheels and the underside of the vehicle were modeled as flat plates, the aerodynamic losses between the vehicle and the ground were not accurately modeled. The variable ride height was achieved by adding Bimba air cylinders in the rear and gear driven torsion bar preload adjustment in the front, allowing the truck to ride 5% lower when driving at speeds over 32 km/hr. At low speeds, the truck retains full ground clearance. The on-board hybrid computer dynamically adjusts ride height.
PSAT MODEL
This year, the UW FutureTruck team has been working with PSAT. It is being developed in a collaborative effort by Argonne National Laboratory and the major automakers. The goal of the modeling package is to narrow the technology focus of the Partnership for a New Generation of Vehicles (PNGV) to those configurations and components that are best suited for achieving the overall goals. PSAT's architecture allows for powertrain designers to develop realistic control strategies and assess component behaviors in a system environment by using models that are closer to reality
than other modeling systems. The PSAT modeling program runs off of Matlab v5.3 and Simulink v3. The modeling system was made available to the universities participating in FutureTruck 2001. The modeling system was used to create a virtual model of the UW team’s Moollennium and simulate driving it over the FTP driving cycle to predict fuel economy and emission data. The model predicts 9.43 km/L in the city and 11.11 km/L on the highway driving cycle. We believe that our truck will surpass the model results. Our model did not implement our shifting strategy. Previously, we have seen fuel economy increase up to 25% by shifting at very low engine speed and causing the engine to operate between 50-75% of peak torque at any engine speed. This should increase our fuel economy to 12.85 km/L (30 mpg) – matching our initial goal.
DFMEA ANALYSIS
In designing the Moollennium, appropriate design techniques were used to minimize component failures. Mechanical Considerations – Safety factors were considered in all components, and FEA analysis was performed for any structural parts that were modified. Splines were used instead of keyways on all rotating components and locking devices (locknuts, safety wire, threadlocker) were used on all critical fasteners. Because of the aluminum frame, coated fasteners and rivets were used to minimize galvanic reactions. Electric Drive System – The temperatures of the inverter, electric motor, and battery pack are continuously monitored. Power limits are lowered as values approach an unsafe level. If the temperatures exceed extreme limits, the electric drive will be totally disabled and the driver alerted. Suspension – The default state of the controller used for the air suspension and torsion bar adjustment is the up position, so if the signal or power is lost, the vehicle will go to its fully raised position. Even if air pressure is lost, the vehicle will remain at its last ride height, rather than immediately dropping to the lowest position. Electrical Considerations – The Moollennium has two Emergency Disconnect Switches (EDS) switches (one in the dashboard and one on the rear bumper) that, when depressed, will disable the entire high voltage system. These would not be installed on a production vehicle but are a required safety feature for our prototype hybrid. Inline fuses protect against serious battery faults, and an inertia switch will disable the high voltage system in the event of a crash.
Figure 24. FLUENT analysis of truck, plot shows the
velocity for the Moollennium at lowered ride height.

16
The 12-volt system includes both an alternator and a DC/DC converter. If either component fails, the hybrid computer will limit 12-volt usage and the dash indicator light will warn the driver. Battery Thermal Considerations – Until the battery management systems is fully developed and tested, the battery box will be equipped with a CO2 fire extinguisher. In the case of a thermal incident, the handle can be pulled, beginning a two-minute shock cooling. The battery pack temperature is monitored at all times. If the temperature exceeds a threshold, the fan circuit will automatically turn on the high-flow blower. The blower is operated continuously during charging. Control Strategy Considerations – The control strategy has been designed with a safety state and any abnormal signal levels will cause it to activate the safety state. For example, the gas pedal signal is typically between 0.8 V and 3.3 V. If there were a low-side fault, the signal would go up to 5V and it would be apparent that something has failed. The control strategy will recognize this discrepancy and hybrid operation would be disabled. Similarly, if the battery voltage ever goes to an extreme value or if the motor controller stops providing feedback to the computer, the strategy automatically goes to a safety state disabling the electric drive and alerting the driver.
INTENDED MARKET
The intended market for the Moollennium is similar to that of a typical light-duty SUV. SUVs are designed for consumers desiring a stylish vehicle with good utility, power and traction for towing heavy loads, traveling in poor weather, or traversing rough terrain. Because of the attractive emissions and high fuel economy, this vehicle will be especially attractive to environmentally conscious and forward thinking consumers. In addition to retaining the original look and feel of a stock Suburban, several features have been incorporated to enhance the consumer acceptability of the vehicle. In addition to the stock audio system, a DVD player and a television display has been mounted in the vehicle for use by the passengers in the second and third rows of seating. An infotainment system has been installed for the driver. This unit includes navigation (GPS), voice activation, stereo and CD player, hands free cell phone and wireless Internet. The unit contains safety features that disable complex driver interaction features while the vehicle is in motion. In modifying the vehicle, care was taken to preserve the full passenger capacity and cargo room found in a stock Suburban. Turnkey start up, air conditioning, cruise control, and power windows are a few of the many attractive vehicle features. The UW FutureTruck can travel 764 km without refueling due to an advanced
control strategy. The vehicle can haul a 3175 kg and is equipped with 4-wheel drive.
MANUFACTURING POTENTIAL
Component selection for the Moollennium was based on functionality, ease of procurement, maintainability, and manufacturability. This vehicle can be produced using existing production line technology. The drivetrain can be installed as a single unit, much like today's current truck production techniques. To further improve manufacturability, some features of the UW FutureTruck would be implemented differently in a mass produced vehicle. For example, the Pentium control computer would be replaced with a less expensive embedded computer. The carbon composite hood would be replaced by an aluminum hood. Additionally, certain components could be made using lighter and cheaper mass production techniques, for example, plastic fuel tanks instead of our prototype welded aluminum tank. Incorporating these modifications into the existing design prior to developing the assembly line would significantly reduce the time and cost associated with production.
COST ANALYSIS
At high volume production, the estimated retail price for the UW FutureTruck is $48,000. Price estimates are based on current Suburban retail prices, with a base cost of $38,000. Table 14 lists the assumptions and prices used to calculate the production price of the Moollennium. The following is a list of assumptions made in determining the cost analysis. • Labor costs would be comparable • All costs have been assessed in year 2001 dollars • 10,000 vehicles are manufactured each year on an
existing vehicle platform • All other components are stock Suburban parts Table 14. Moollennium Production Cost Estimates
Component UW Prototype Cost Production Cost
Stock Vehicle $38,000 $38,000
Motor/Inverter $9000 $2,500
Computer $5,000 $2500
Batteries $10,000 $3,800
Al. Components $5,000 $500
Alum. Frame $50,000 $1000
Total $117,000 $48,300 1 72% mass production discount for all electronic components. 2 Upgrade cost for additional processing to be included in power control module.

17
The following is a list of assumptions made in determining the cost analysis. • 10,000 vehicles are manufactured each year on an
existing vehicle platform • Labor costs would be comparable • All costs have been assessed in year 2000 dollars • All other vehicle components are the same as those
found in a stock Suburban
SUMMARY
The Wisconsin FutureTruck team has successfully converted a 2000 Chevrolet Suburban into an electric assist, charge-sustaining, four-wheel drive parallel hybrid-electric vehicle. Utilizing a 2.5 liter CIDI engine (104 kW), a six-speed transmission, a single-speed transfer case and a prototype axle-speed traction motor (68.5 kW), UW-Madison has minimized components and complexity in creating a unique hybrid powertrain. In an effort to minimize Greenhouse Gas Emissions, weight reduction, hybridization and alternative fuels were employed. An all aluminum SUV frame was the largest weight reduction component helping to reduce the weight of the Moollennium to 2314 kg – 281 kg lighter than the stock Suburban. A 72 kg NiMH battery pack, a Solectria motor controller and Marathon Electric traction motor supplied the hybrid powertrain responsible for increasing the Moollennium’s city fuel economy by 50% to 11.8 km/l (27.5 mpg). The utilization of Biodiesel (B20) eliminates the upstream emission ‘add-ons’ when the soybean’s recaptured CO2 is considered. The Moollennium is a highly recyclable, highly manufacturable, prototype hybrid SUV which has demonstrated an over-the-road GHG reduction of 2.5.
REFERENCES
1. Marshaus, Ramnarine, et al., “Development of the University of Wisconsin's Parallel Hybrid-Electric Sport Utility Vehicle,” SAE Special Publications March 2000, SAE
2. Bayer, Koplin, et al., “Optimizing the University of Wisconsin’s Parallel Hybrid-Electric Aluminum Intensive Vehicle,” SAE Publications March 1999, SAE
3. Bower, G.R., et al., “Design of a Charge Regulating, Parallel Hybrid Electric FutureCar,” SAE Publications February 1998, SAE 980488.
4. Johnston, Brian, et al., “The Continued Design and Development of the University of California, Davis FutureCar,” SAE Publications February 1998, SAE 980487.
5. Thomas, C.E., et al., “Societal Impacts of Fuel Options for Fuel Cell Vehicles,” SAE Publications October 1998, SAE 982496.
6. PNGV Battery Test Manual, U.S. DOE, Idaho National Engineering Laboratory, DOE/ID-10597, Jan. 1997
7. Wiegman, H., Vandenput, A., "Battery State Control Techniques for Charge Sustaining Applications," SAE
Publ. 981129, SP-1331, 1998, pp 65-75 , and 1999 SAE Transactions
8. Scholl, K. and Sorenson, S., “Combustion of Soybean Oil Methyl Ester in a Direct Injection Diesel Engine,” 1993, SAE 930934.
9. Tree, D., et al; “Emission Tests of Diesel Fuel with NOx Reduction Additives,” 1993, SAE 932736.
APPENDIX
A. SYMBOL LIST m = mass of vehicle (kg) g = gravitational acceleration (9.8 m/s^2) V = velocity (m/s) θ = inclination of road (rad) ρ = density of air (~ 1.3 kg/m^3) A = frontal area of Truck (~4.169 m^2) Cd = drag coefficient (~.446) Crr = coefficient of rolling resistance (~.006)
B. EXHAUST GAS RECIRCULATION
One of the main drawbacks of compression ignition (CI) engines is the high oxides of nitrogen emission levels. CI engines utilize high compression ratios (15-18:1) to achieve high thermal efficiency. Unfortunately, high in-cylinder temperatures promote the formation of NOx during combustion. It has been found that NOx emissions can be reduced by introducing exhaust gas into the intake charge. This practice is known as exhaust gas recirculation (EGR). NOx emissions can further be reduced by cooling this recirculated exhaust gas. The 2.5 L LandRover engine was not originally equipped with an EGR intercooler. The purpose of an EGR intercooler is for the heat exchanger to lower the temperature of the EGR stream by using the cooling system as its heat sink. This exchange of heat results in two advantages. First, cooling of the exhaust gas produces lower NOx emissions from forming. Second, the coolant that is heated is then pumped directly to the heating system for the vehicle. Because of the benefits of EGR intercoolers, the LandRover engine has been fit with an intercooler. It will provide heat to the cabin much more quickly and efficiently than the stock heating system alone. C. USE OF ALUMINUM Aluminum provides many advantages over alternative materials in vehicle production. Beneficial characteristics of aluminum include desirable energy absorption and crashworthiness, versatility in design, high elasticity, high strength-to-weight ratio, reduced noise and vibration, and resistance to corrosion and rust-related failures. In the manufacturing process, lighter aluminum can mean easier mobility of material. In

18
addition, dies used for aluminum are less expensive than those used for harder steel due to the ease of working and forming aluminum. Production and development of aluminum-intensive vehicles have generated the following results: • 45-55% body structure weight reduction • 25-35% increased torsional rigidity • Up to 50% assembly parts consolidation • Improved crash performance • Dramatic reduction in tooling costs Issues to address with aluminum include the higher cost of raw material and lower stiffness (by a factor of three) in comparison to steel. Companies such as ALCOA and BMW are developing new manufacturing processes for aluminum. The BMW 500 series axles were hydroformed for higher stiffness and fatigue strength, and then GMA welded together. Aluminum tends to respond well to GMA and GMA-impulse welding. For high-quality joints, TIG welding is also used. Table A.1 - Material Properties for Aluminum and Steel. Alloy & Temper Ultimate
Strength (ksi)
Yield Strength
(ksi)
Modulus of Elasticity
(ksi)
Alum. 2014-T6, T651
70 60 10.6
Alum. 6061-T6, T651
42 37 10.0
Alum. 7075-T6, T651
83 73 10.4
Steel 1020 HR 66 42 30 Steel 1018 A 49.5 32 30
D. Battery Pack Emergency Cooling In case of a thermal emergency, a Carbon Dioxide Fire Extinguisher has been integrated into the battery system. The CO2 extinguisher is deployed by manually pulling a handle. The discharge rate has been modified with an orifice that forces the contents of the extinguisher into the battery pack over an extended time period. To verify the capability of such a system multiple tests were performed to quantify the effectiveness of the fire extinguisher and orifice designs. The results of these are shown in figure D1. The CO2 gas is introduced into the battery pack through the intake plenum, dramatically reducing the pack temperature and preventing the escalation of thermal activity.
-20 0 20 40 60 80 100 120 140 160 180 200-10
0
10
20
30
40
50
60Fire Extingisher Cooling Rates
Single Orifaces, .04in dia.
Two Oriface, .063in dia.
Tem
p of
Bat
tery
[C]
Discharge Time [sec]
Figure D1. Orifice arrangements on fire extinguisher nozzle to slow cooling rates and sustain cooling for longer period of time.
D. Titanium Properties.
Condition
UltimateShear
Strength[UTS](MPa)
YieldStrength
ττττ .2%[.2% YS]
(MPa)
ShearStrain atFailure
[El.](%) [% RA]
ShearModulus
(Gpa)
Numberof Tests
αααα/ββββ-ββββ +Lab ST*
1162[1366]
983[1311]
4.2[11] [37.6]
46 2[2]
ββββ-ββββ + LabST
1177[1382]
966[1316]
4.7[10] [36.9]
46 2[2]
ββββ - αααα/ββββ +Mill ST
976[1256]
875[1209]
3.1[13] [43.1]
46 3[2]
ββββ - αααα/ββββ +Lab ST
1133[1401]
1021[1339]
3.53[14] [41.5]
46 2[2]
αααα/ββββ-αααα/ββββ +Direct Age
1064[1522]
1064[1471]
2.06[10] [29.7]
49 1[2]
ββββ-ββββ +Direct Age
1233[1492]
1091[1445]
3.81[9] [33.4]
46 1[2]
* Solution Treatment = 760°C/30min/WQ
Notes: All Samples Aged at 538°C/6h Except Mill ST Torsion Samples - Aged at 527 °C/6h
Condition
UltimateShear
Strength[UTS](MPa)
YieldStrength
ττττ .2%[.2% YS]
(MPa)
ShearStrain atFailure
[El.](%) [% RA]
ShearModulus
(Gpa)
Numberof Tests
αααα/ββββ-ββββ +Lab ST*
1162[1366]
983[1311]
4.2[11] [37.6]
46 2[2]
ββββ-ββββ + LabST
1177[1382]
966[1316]
4.7[10] [36.9]
46 2[2]
ββββ - αααα/ββββ +Mill ST
976[1256]
875[1209]
3.1[13] [43.1]
46 3[2]
ββββ - αααα/ββββ +Lab ST
1133[1401]
1021[1339]
3.53[14] [41.5]
46 2[2]
αααα/ββββ-αααα/ββββ +Direct Age
1064[1522]
1064[1471]
2.06[10] [29.7]
49 1[2]
ββββ-ββββ +Direct Age
1233[1492]
1091[1445]
3.81[9] [33.4]
46 1[2]
* Solution Treatment = 760°C/30min/WQ
Notes: All Samples Aged at 538°C/6h Except Mill ST Torsion Samples - Aged at 527 °C/6h Figure E.1. Timetal®LCB Alloy
Torsional and Tensile Properties from Heat R3404, 14.3 mm Dia. Bar
0.001
0.01
0.1
10 2 10 3 10 4 10 5 10 6 10 7
LCB Titanium 92v45 Steel, HRC 55
Shea
r Str
ain
Ampl
itude
Reversals to Failure, 2NfChart Courtesy of Rockwell Science Center
Heat, V7702,
35.6 mm Dia.α/β Forged
0.001
0.01
0.1
10 2 10 3 10 4 10 5 10 6 10 7
LCB Titanium 92v45 Steel, HRC 55
0.001
0.01
0.1
0.001
0.01
0.1
10 2 10 3 10 4 10 5 10 6 10 710 2 10 3 10 4 10 5 10 6 10 7
LCB Titanium 92v45 Steel, HRC 55LCB Titanium 92v45 Steel, HRC 55
Shea
r Str
ain
Ampl
itude
Reversals to Failure, 2NfChart Courtesy of Rockwell Science Center
Heat, V7702,
35.6 mm Dia.α/β ForgedSh
ear S
trai
n Am
plitu
de
Reversals to Failure, 2NfChart Courtesy of Rockwell Science Center
Heat, V7702,
35.6 mm Dia.α/β Forged
Figure E.2. Torsional Strain-Life Fatigue Behavior of
Timetal®LCB Alloy vs 92V45 Steel