Design and optimization of a 50’ sailing catamaran
79
CHALMERS Design and optimization of a 50’ sailing catamaran By Clémentine Perret January 2005 Report No. X-05/160 Department of Shipping and Marine Technology Chalmers University of Technology Chalmers Tvärgata 8 SE-412 96 Göteborg Sweden 1/59
Transcript of Design and optimization of a 50’ sailing catamaran

CHALMERS
Design and optimization of a 50’ sailing catamaran
By Clémentine Perret January 2005 Report No. X-05/160 Department of Shipping and Marine Technology Chalmers University of Technology Chalmers Tvärgata 8 SE-412 96 Göteborg Sweden
1/59

2/59

1. Abstract The French firm Yachts Industries builds a series of aluminum sailing catamaran
called Yapluka. They have in project a new boat of 50’. The existing Yapluka:s which are all based on the same lines creates a large stern wave when sailing at a certain speed. These waves generate a considerable amount of resistance and the catamarans cannot exceed this speed. The aim of the present thesis is to draw the lines of the new 50’ catamaran such that the stern wave is reduced while keeping the same silhouette as the existing boats, which is the signature of the yard.
The softwares used are Rhinoceros for the design and Shipflow for the CFD calculations.
2. Acknowledgement
Thanks to my supervisor Lars Larsson who would always find a moment to follow his students even if he is overbooked. Thanks for his accurate advices and his precious time. Most of this thesis has been done in France, in the firm Yachts Industries. I am very grateful to Sofia Werner, a PhD student who has been also my supervisor. She was really available and helpful even from the other side of Europe! Also Carl-Erik Janson, as the creator of Shipflow had often the right sentence to solve a problem that would have taken hours to everybody else. Un grand merci à Nicolas Bathfield qui m’a beaucoup aidé dans l’utilisation de Shipflow et dans la résolution de problèmes de télé-transportation. Thanks a lot to Martin Meyer to have been my supervisor in Yachts Industries. Merci à Jean-Louis Hervé pour ses conseils avisés. And last but not least, a warm thanks to Sun Jae-Ouk, my opponent and my friend.
3/59

4/59

3. Nomenclature Elongation of hull: Lwl/Bh Relative length: ratio length over displacement Specific capacity: capacity to displacement ratio Transverse clearance: 2b=Bcb/Lwl, c=Bcb/Bh AM midship section Atr submerge transom area B breadth of the boat b transverse clearance: 2b=Bcb/Lwl Bh breadth for one hull Bcb distance between the centerlines of the hulls c transverse clearance: c=Bcb/Bh Cb block coefficient CFD Computational Fluid Dynamics Cp coefficient prismatic Ct coefficient of total resistance Ctr coefficient of resistance due to the transom Cw coefficient of wave resistance Di distance between the inner sides of the hulls Disp displacement Fn Froude number; Fn = V/√(g*Lwl ) LCB longitudinal center of buoyancy Loa length over all Lwl length of the water line RANS Reynolds Average Navier-Stokes: method for CFD Rf frictional resistance Rt total resistance Rw wave resistance; Rw = Cw*0.5*g*1025*Fn2*Sref N.m-3 Shipflow CFD software Sref wetted surface at the first iteration in Shipflow calculation YI Yachts Industries T draft t tones kts knots
5/59

6/59

4. Table of Contents 1. ABSTRACT 3 2. ACKNOWLEDGEMENT 3 3. NOMENCLATURE 5 4. TABLE OF CONTENTS 7 5. TABLES 9 6. TABLE OF FIGURES 9
I. INTRODUCTION 11
A. BACKGROUND 11 B. GOAL AND SCOPE 12 1. THE SUBJECT 12 2. LIMITATIONS 12 C. WORK PLAN 13 D. DESIGN SPECIFICATION 14 1. QUALITATIVE SPECIFICATIONS 14 2. DESIGN SPEED 15 3. QUANTITATIVE SPECIFICATIONS 15 4. INITIAL DESIGN 16
II. HYDRODYNAMICS DESIGN 18
A. COMPUTATIONAL METHOD 18 1. SHIPFLOW 18 2. CHOICE OF METHODS 19 3. GRID DEPENDENCE STUDY 20 4. LIMITATIONS OF THE COMPUTATIONAL METHOD 23 B. INVESTIGATED HULLS 24 1. CHOICE OF PARAMETERS TO TEST 24 2. SERIES OF HULLS 27 C. EFFECT OF DESIGN PARAMETERS ON HYDRODYNAMIC PERFORMANCE 29 1. ON CLEARANCE* 29 2. EFFECT OF HULL SHAPE 32 3. ON DISPLACEMENT 38 4. COMPARISON OF THE DIFFERENT HULLS 42 5. TRIM 45 D. CONCLUSION 47
III. PRACTICAL DESIGN 48
A. SHIP MOTION 48 1. STABILITY 48 2. SEAKEEPING 49 3. MANEUVERABILITY 52 B. FINAL HULL 53
IV. CONCLUSIONS AND DISCUSSION 55
V. FURTHER WORK AND RECOMMENDATIONS 56
7/59

VI. BIBLIOGRAPHY 59
8/59

5. Tables Table 1: Design speeds ____________________________________________________________________ 15 Table 2: Mean main particulars _____________________________________________________________ 16 Table 3: Main particulars deducted from the two other catamarans _________________________________ 17 Table 4: Specification of the initial design _____________________________________________________ 17 Table 5: Recommended Atr/Am _____________________________________________________________ 24 Table 6: Hulls types ______________________________________________________________________ 27 Table 7: Effect of design parameters on different assessment variables ______________________________ 54
6. Table of figures Figure 1: Previous catamaran ______________________________________________________________ 14 Figure 2: Shipflow methods of calculation _____________________________________________________ 18 Figure 3: Grid definition in Shipflow _________________________________________________________ 20 Figure 4: Grid zones______________________________________________________________________ 20 Figure 5: Choice of the number of points for the grid of the interior free surface _______________________ 22 Figure 6: Effect of the refinement of the grid on Cw _____________________________________________ 22 Figure 7: Flow following the hull ____________________________________________________________ 25 Figure 8: Flow under a concave hull and pressure due to the flow __________________________________ 25 Figure 9: Hulls shapes ____________________________________________________________________ 28 Figure 10: Effect of the clearance on Cw for two Fn _____________________________________________ 29 Figure 11: Effect of the clearance on Cw for two Fn _____________________________________________ 29 Figure 12: Effect of the clearance on trim for two Fn ____________________________________________ 30 Figure 13: Effect of the clearance on trim for two Fn ____________________________________________ 30 Figure 14: Comparison of the wave cuts at the hull axis for the hull H-16 C3 with different clearances _____ 31 Figure 15: Comparison of the waves created by H-16 C3 at Fn= 0.4 ________________________________ 33 Figure 16: Comparison of the waves created by H-16 C3 at Fn= 0.6 ________________________________ 34 Figure 17: Comparison of the draft of the aftbodies on Rw for a range of speeds _______________________ 35 Figure 18: Comparison of the concavity of the hulls on Rw for a range of speeds ______________________ 36 Figure 19: Comparison of the concavity of the aftbodies on trim for a range of speeds __________________ 36 Figure 20: Comparison of the draft of the aftbodies on trim for a range of speeds ______________________ 37 Figure 21: Flow velocity on convex/concave hulls_______________________________________________ 37 Figure 22: Influence of displacement on Cw ___________________________________________________ 38 Figure 23: Influence of displacement on Rw ___________________________________________________ 38 Figure 24: Change of displacement for one hull and effect on Rw___________________________________ 40 Figure 25: Change of displacement for one hull and effect on Cw___________________________________ 40 Figure 26: Rw function of displacement for three hulls ___________________________________________ 41 Figure 27: Comparison of the hulls at Fn=0.4__________________________________________________ 42 Figure 28: Comparison of the hulls at Fn=0.6__________________________________________________ 42 Figure 29: Comparison of displacement and wave resistance ______________________________________ 43 Figure 30: Grids comparison on the different hulls ______________________________________________ 44 Figure 31: Cw when trimming ______________________________________________________________ 45 Figure 32: Sref when trimming______________________________________________________________ 45 Figure 33: Rw when trimming ______________________________________________________________ 46 Figure 34: Effect of an initial trim on the final trim ______________________________________________ 46 Figure 35: Stability, GMt __________________________________________________________________ 48 Figure 36: Zone of motion sickness; ISO 2631 [9]_______________________________________________ 49 Figure 37: Wave acceleration_______________________________________________________________ 50
9/59

10/59

I. Introduction
A. Background Yachts Industries is the association of two yards: Garcia Aluminum and Yapluka Yacht. The Garcia yard is specialized in luxury mono-hull and Yapluka in luxury sailing catamarans. Both build their yachts in aluminum. They have moved together to Caen-la-Mer two years ago. “Wonderful” is the first boat built in Caen by Yachts Industries. This 70’ catamaran has been launched on the 14th of September 2004 in Caen-la-Mer. Until now, all the boats were designed by exteriors designers and naval architects. The aim is to develop the engineering and design department and in few years making the boats from the drawing to the light-work at the yard. Their customers are people passionate by the sea who like sailing but who are not always trained. The yachts are usually driven by a crew and most of the time used as a charter. They are very luxurious, good looking, with all the state-of-the-art electronics and equipments. Most of the time will be spent at port so the efficiency of the hull is not so much important, as soon as the boat is still impressive while sailing and as the boat is able to pass through the oceans. The main design goal is to have a maximum of place and volume inside and to carry a maximum of weight without any problem. All the Yapluka:s have a problem of wave resistance: at a certain speed, a very large stern wave is formed and it is difficult to accelerate more. Moreover, this deteriorates the yacht image since the stern wave is so visible and also, to the crew it feels like the boat is breaking apart. Therefore, it could be useful to know why there is such a problem and how to solve it. That is the subject of the thesis.
11/59

B. Goal and Scope
1. The subject The subject of the present thesis is design and optimization of a 50’ catamaran hull. The aim is to design a new catamaran in the same spirit as the previous ones but the efforts will be put on the aftbody, to avoid the problem of the stern wave. The resistance of the ship gives an idea of the power needed to drive the ship at a certain speed. Thus the lower the resistance, the faster a ship can go with the same amount of energy or the less fuel she will burn at the same speed. Therefore and as the other terms of the total resistance are less important at the speeds studied, hull efficiency will be evaluated with respect to the wave resistance. Different solutions will be purposed and a series of hulls will be drawn. Then they will be tested with Shipflow and compared. The study is oriented mostly on the hydrodynamics of the different hulls. However, a quick review of the effects on the seakeeping and maneuverability will be presented as the consequences of the changes done to improve the wave resistance. The catamaran is aimed to sail on motors or on sails. The speed reached with motors is generally lower than the one reached under sails. This is due to the difference of power provided to the ship and to the place of the forces acting on the ship. So in order to predict the behavior of the ship in all conditions, she has to be designed for two different speeds corresponding to the speed when going with the motors and the speed on sails. Thus the hydrodynamic tests will be done at the two design speeds.
2. Limitations The forebody influences the behavior of the yacht too, but the thesis will not show this aspect, due to the lack of time. Besides as the stern wave is the main problem, the shape of the aftbody should be more influent on the wave resistance. In the Shipflow tests, the sails and the forces acting on it will be neglected. The Yapluka:s are totally customized and so the sails can change from one to another; moreover no precise data concerning the sails were available. The center of gravity will be considered at the vertical of the center of buoyancy for the same kind of reason: The general arrangement is decided during the construction of the hull so that it is impossible to know the place of the weights at the design stage. That means too that the exact weight is unknown. To get an idea of the effects of these three parameters, some tests will be done with a series of initial trims and with different initial drafts. None of the appendages will be designed; only the hull it-self will be studied. It is true that the interaction with keel could be quite important but it will be left apart.
12/59

C. Work plan The thesis will go as follow: First the drawings of the new solutions for the hull, Then the description of the tests done with Shipflow Last, the practical choice of the final hull Fourteen hulls have been designed with the 3D CAD software Rhinoceros. They have all the same forebody. The changes are only on the aftbody shape. Among the hulls, there are some with dry transom and some with submerge ones, and different curvatures of the bottom. The changes from on hull to another will be kept as small as possible except for the two parameters above. To find the right clearance, series of calculation with different clearance at different speeds will be done. To evaluate the hulls, Shipflow will be used to calculate the wave resistance. Then some calculations and considerations will be done on the seakeeping and the maneuverability. Last, a final hull will be designed with Rhino and then evaluated with Shipflow.
13/59

D. Design specification First of all, the specifications of the new boat must be put down. Most of the specifications will be only qualitative since there is no exact numbers or since the qualities required are uncountable.
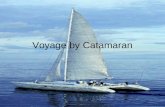
1. Qualitative specifications The new yacht is a catamaran. Nowadays, catamarans are used quite often for cruising yachts, as they give the advantage of a wide mess. They enable more living space for the same length. If light, they are faster compare to monohull. The new yacht will be sailed by a crew employed by the owner. In the general arrangement, there will be approximately four cabins of two persons: one for the owners, two for the guest, and one for the crew. Obviously the cabin for the crew is really tiny compared to the others. The boat will cost a fortune and so has to be the pride of the owner: she must look good and impressive, be quite fast at sea, and have a lot of luxury equipments. For example, for the last yacht built (70’ catamaran), the owner ask for a Jacuzzi on the center beam. It could be nice, but there is a price to pay: the yacht is very heavy. The 47’ has been design for 18.2t and the 53’ for 21t, but in fact they were heavier when launching. The class A of the CE and the Bureau Veritas classification are required. Yapluka has become a brand of catamaran. Even if only four catamarans have been built, they dispose of a range of plans from the 47’ to the 90’. The new one must be in the same kind of silhouette. The next picture (Figure 1) shows the existing 53’ catamaran while sailing. Figure 1: Previous catamaran
14/59

2. Design speed Two speeds are important for this kind of boat: the speed when running at motors and the one when sailing. Actually, for the existing boats, these speeds are quite different: around 8kts for the motors and around 14kts for the sails. That gives some Froude numbers between 0.35 and 0.6. The aim is to optimize the hull for the speed of 10kts for motors and 14.5kts for sails, i.e. Fn = 0.4 and 0.6. That means that the boat is in the range of semi-displacement or planning. In that range of speed, the main component of the total resistance is the wave resistance [4], so only a quick overview will be given to the frictional resistance and the resistance due to the wake will be neglected. Table 1: Design speeds
in knots in m/s Fn motor sail motor sail motor sail
47' 8.0 12.0 4.0 6.01 0.332 0.49853' 9.5 14.0 4.8 7.01 0.394 0.58150' 9.6 14.4 4.8 7.24 0.4 0.6
3. Quantitative specifications The yard wants a new yacht with LOA equal to 50’; that is the only compulsory value. For the other values, the owner will always be happy with the biggest ones: the more living space the better. A large beam could lead to problem to berth the yacht, but that is the kind of problem let to the owner. Also the beam interferes with the behavior of the yacht on seas and that will be studied further. The hull beam has to be wide enough to contain a bunk for two persons thus it is better to keep it wider than 2m. A man has to stand in the yacht, so the depth has to be around 2m. For the weight, the only limit is what the hull can support. For hydrodynamic efficiency, the beam will influence the interaction between the two hulls wave pattern and so it will be studied. The hull beam has to be as small as possible because the slender the ship will be the better she will sail. For a good sailing yacht naval architects advice a ratio of length over beam hull bigger than 10 to 1 and at least 8 to 1 [10]. But because of the restrictions from the aim of the boat, these values will be impossible to reach. The displacement has to be kept as small as possible, because the resistance increases with it. The class A will be reached easily. It can already be considered as done (See appendices).
15/59

4. Initial design The initial design is based on the existing catamarans, some literature and some practical consideration. The initial design taken is a hull with a similar forebody as the one of the 53’ Yapluka. Dubrovsky and Lyakhovitsky [3] give some advices for the main particulars depending on Fn; they are reported in Table 2. The data are based on different experiments and from a mean on a large number of existing multi-hulls. Also in Table 2 is shown data for the initial hull design in this study. That shows clearly that the design weight is already too heavy compared with the relative length. The customers of yachts Industries are always adding new equipment into the yacht, so that the catamaran is likely to be even heavier. However these values will be taken as references. Table 2: Mean main particulars
Fn on motors
Fn on sails
First hull designed
Fn 0,4 0,6 relative length 8,6 10,3 6,646
Cb mini 0,512 0,461 Cb maxi 0,55 0,5 0,457
Cp mini 0,6 0,642 Cp maxi 0,631 0,681 0,586
Bh/T 2,5 2,5 2,802 transverse clearance, b Depends on the shape of the hulls
Di 0,75*B1 0,75*B1 Relative length is the ratio of Lpp/displacement. The advice on the transverse clearance depends on the shape of the hull. For U-shape, as the hulls used for the Yapluka, there is no possibility of good interaction: The interference between the wave patterns coming from the two hulls will add resistance to the yacht whatever the clearance is. Main particulars have been deducted from the ones of the two existing catamaran. With the help of the scale factors from the Principle of Yacht Design [2], kind of mean values has been calculated that are given in Table 3.
16/59

Table 3: Main particulars deducted from the two other catamarans
Bcb is the length between the axis of the hulls To have a better idea of the weight of the yacht, an excel sheet has been compiled summering all the main weights (See appendices). Some of the numbers have been taken from the existing boats and some others are based on the experience of the employees of the yard. Others are simple assumptions. The displacement obtained is then really closed to 21.2t. Keeping a margin because the boats are always too heavy, the design displacement will be 21.7 t. The displacement of the hull will be kept at 21t i.e. 1,04e10 mm3 adding the displacement of the keel, each around 0.3 m3 and then the displacement of the rudder, the total displacement will be around 21.7t.
L(feet) 50 L(m) 15,25 Lwl (m) 14,25 B(m) 7,80 L/B 1,95 Bcb (m) 5,30 L/Bcb 2,69 Bh (m) 2,50 L/Bh 6,10 Bwl hull (m) 2,10 Toa (m) 1,40 T (m) 0,76 freeboard (m) 1,65 LCB % -5 LCB (m) 7,84 displacement empty (t) 21,00 Cp 0,626 AM (m2) 1,10 Cb 0,388
The hull beam has been chosen equal to 2.1 m to try to reduce some coefficient used in naval architecture and known as influent on the wave resistance: For example Bh/T is equal at 2.8 in the initial design but it is normally only 2.5 for a catamaran [3]. It is also known that the narrower are the hulls the better the yacht will be. T is 0.77 m, as it is a value in the same range of the existing Yapluka catamaran, but a bit higher to keep Bh/T small. For the initial hull, Cp and Cb have been kept as close as possible to the recommendation of Dubrovsky and Lyakhovitsky [3] keeping the other values constant. The value obtained has been kept constant for the series of hull, as the value of the midship section. The LCB value is of -6.5% for the initial hull, but that couldn’t be constant due to the other change in the hull. The length overall is 50’ for all hulls tested, but because some have submerge transom and other not, the water length changes. Table 4: Specification of the initial design Volume Displacement (mm3) 1,04E+10Center of Buoyancy % -6.5Waterline Length (mm) 14731Maximum Waterline Beam 2026AM (m2) 1,18Cp 0,59Cb 0,44T (mm) 776H (height of the transom above the water) 0
17/59

II. Hydrodynamics design To optimize the hull, tests are done with a CFD software, Shipflow, in order to compare different solutions from a hydrodynamic point of view. These tests are done in order to compare the effects of different parameters on the hull efficiency. These parameters are the clearance between the hulls of the catamaran, the transom of the yacht and the convexity of the aftbody. The efficiency of the hulls will be evaluated on the total resistance, the trim and the wave height.
A. Computational method
1. Shipflow The CFD (Computational Fluid Dynamics) software Shipflow is developed by Flowtech International AB and Chalmers University of Technology. This software makes use of three different methods to compute the resistance of a ship: A potential method, a boundary layer method and the Reynolds Average Navier-Stokes equations (RANS). Each of these methods is applied to a certain area of the flow domain as shown in Figure 2. Figure 2: Shipflow methods of calculation
The computation could be done resolving the RANS equations on the whole domain, but that needs too much memory and time to obtain accurate results and the actual computers can not handle it. That is why Shipflow use a decomposition of the flow domain. The assumption is that the wave resistance depends on an inviscid process far from the hull and that the viscous resistance is unaffected by wavemaking and is occurring close to the hull, in the boundary layer. The wave generation can therefore be modeled by the potential method, as well as the far field flow. Close to the hull and aft of the transom, other methods have to be used. The boundary layer method in zone 2 considers the pressure across the boundary layer as constant. The domain of the boundary layer is very fin so that assumption is close to the reality. This method simplifies the calculations comparing to the RANS method and that enables to compute the viscous resistance in the second zone. The flow in the zone 3 is turbulent and difficult to model. That is why if the resistance coming from this zone is needed, the RANS method has to be used to compute it. This method is not a free surface code. The shape of the free surface will be computed with the panel code, and then the flow under the surface will be computed with RANS, so that all parts of the hull under the free surface are taken into account after the wave pattern calculation and not only under the still water surface
18/59

In Shipflow all the data are without dimensions: The length used to take off the dimension is Lwl. So the length of the model boat will be around 1, the displacement of the model yacht will be the one of the real yacht divided by Lwl3, etc.
2. Choice of methods To compute the wave resistance, the potential method will be used. Then the viscous resistance will be calculated with the boundary layer method in order to make a comparison on total resistance. The viscous resistance in the wake is not so important in the range of speed studied here; even if to calculate it would have enabled to give more accurate results. The potential method can not compute breaking waves. So if one wants to calculate accurately the resistance, another method (Volume of Fluid or Level Set Techniques) has to be used, but these methods are still on studies. Another solution to obtain some results is to use a very coarse grid. A coarse grid enables to compile the hull because it smoothes the wave system; but that reduces the wave amplitude and could affect the wave lengths and directions. This phenomenon is known as “numerical dispersion” and leads to non-accurate results. The best hulls will create a smaller and probably non-breaking wave and so the computations of these hulls will support a refine grid. The results will be more accurate and also the obtained values will be higher than with a coarse grid (see Figure 6 and [5]). Shipflow can either compute wave resistance with linear or non-linear calculations. The linear method is faster (a computation takes around 5 seconds) and can calculate most of the problems, whereas the non-linear method will use many iterations (until 30 iterations and sometimes 20 min) and maybe find a divergent solution. The linear method is quite accurate for slow ships or very fast and slender ones. This catamaran is fast (Fn > 0.4) and slender (B/L > 7), so this method could be good enough. But in linear method the domain is bounded to the undisturbed free surface and anything above is disregarded [4]. However the hulls to be tested differ only by small changes in the stern, some will have dry transom, others submerge transom, and that is the kind of differences that will be badly computed. Therefore the non-linear method will be used. When the ships are going forward, the flow will follow the hull and so at a certain speed, the submerge transom will become dry. Unfortunately, Shipflow can not calculate if the transom is still wet. It will be assumed that at the computed speed, the transom is dry. This is a reasonable assumption because Fn > 0.4, and that speed should be sufficient to have a dry transom.
19/59

3. Grid dependence study Before doing any test on the hull, to know how to model the grid is very important. That is the aim of the grid dependence study. The grid in Shipflow is done as describe in Figure 3. Figure 3: Grid definition in Shipflow
The points longitudinally are called stations, and along the beam, points. On Figure 3, the ship is placed between XBOW and XSTE. XUPS is the furthest point above the ship and XDOW the lowest one. STAU is the number of station between XUPS and the bow, STAM is the number of station along the ship and STAD is the number of station between the transom and XDOW. No heeling angle will be studied; therefore the model is totally symmetrical from the center axis. Then, only half of the domain will be modeled with a mirror. There are different grids: one for the body, 3 or 4 for the water. The water is decomposed in three main parts; one ahead of the ship, one along the ship and one aft of the ship. For the ships with transom stern, a grid can be added below the stern. In the case of this catamaran, the stern shape is so that a transom grid is required to obtain correct results. Figure 4: Grid zones
5
3
2
1
4
20/59

(1) Grid on the ship body This grid corresponds to the zones 1 and 2 of the Figure 4. The zone 2 is done by mirroring the zone 1. When the linear methods are used, a good way to find the error due to the model of the ship is to do the calculations without any free surface. The resulted resistance should then be zero. Shipflow calculates the coefficient Cxpi by the integration of the pressure around the ship. Instead of zero, Shipflow gives a positive value which can be considered as the error. For the non-linear computation, the grid on the ship will change at each iteration, following the wave height, so that the previous approach is not anymore valid. However that gives an approximation of the error and the smaller the error due to the ship grid for the linear calculation will be, the smaller will be the error for non-linear calculation. The error is calculated by the percentage that Cxpi represents compare to Cw calculated with the linear method. The computations show that there are almost no differences if the ship grid is composed of 30 stations and 7 points or if it is composed of 30 stations and 15 points. On the other hand, the computing time needed is almost divided by two. So the chosen grid is 30 by 7. The minimal error found is 1.3%.
(2) Grid on free surface In Shipflow manual [5], it is recommended to have around 25 stations in the grid of the free surface per wave. In the present case Fn = 0. 4, there will be one wave along the hull and at least one wave is required after the ship to calculate the wave resistance. Ahead of the ship the recommendations ask for half the number of stations that are along the ship. Different grids have been tested by a non-linear method and the error is based on the comparison of the wave resistance of the finest grid tested: Error = (Cw(finest grid)-Cw)/Cw(finest grid) First a series of computation are done to find the right length of the grid aft the ship and the right beam of the grid, i.e. respectively XDOW and Y4SIDE. These computations are done with a fine grid: free point STAU STAM STAD transom point
15 11 25 30 8 The best grid seems to be around XDOW=2.5 and Y4SIDE=2; finer grid do not give a significant decrease in the error but coarser one increases the error. Then this study is improved in changing the number of station at the same time as XDOW and Y4SIDE change slightly. free point STAU STAM STAD transom point XDOW Y4SIDE
17 11 25 35 8 2,4 2 35 correspond exactly to 25 panels per waves: Fn = 0.4 so wave length = 1, XDOW = 2.4 so there are 1.4 waves aft; and 25*1.4 = 35! So the recommendations of the Shipflow manual are suitable. For Fn = 0.6, the same study has been done and that gives XDOW = 2.5 and STAD=35. With these values, the computation is quite quick and the error is still less than 1%.
21/59

Then the number of points for the interior free surface group (i.e. zone 4 on Figure 4) has been studied. This grid is quite problematic: in the study, the clearance will be changed and for facilities reasons, it could be good to have the same number of points for all the computations. That is why different clearance have to be taken into account. The study advices 9 points for a clearance of 0.35; but when the clearance will become higher, this study may become out of date. So another study has been done with a clearance of 0.5.
22/59
Figure 5: Choice of the number of points for the grid of the interior free surface
or b=0.35 that corresponds to almost 9 points but for b=0.5, 12 points are needed. So 12 oints will be taken. In reality, when it came to do the computation, almost none of the hulls
he value of Cw is abilized when the
The Figure 5 shows
at the error isInterior Free surface
0,00E+00
1,00E+00
2,00E+00
3,00E+00
4,00E+00
5,00E+00
6,00E+00
7,00E+00
0 0,02 0,04 0,06 0,08 0,1
clearance/points
erro
r
clearance 0.35 clearance 0.5
threally dependant on the number of points comparing to the surface to grid. Looking at the figure, if the points taken are so that the clearance divided by the points is 0.4, the error is less than 1%.
Fphave been compute with a transom free surface grid of 12 points because these calculations did not converge. The most problematic grid is the one in transom group (zone 5 in Figure 4), because that is the place where breaking waves appear. Thus, for some hulls the grid has to be coarse to get a convergent result. Figure 6 shows the wave resistance coefficient changes due to the grid in the transom group. Figure 6: Effect of the refinement of the grid on Cw
Grid on transom free surface
3,70E-033,80E-033,90E-034,00E-034,10E-034,20E-034,30E-034,40E-034,50E-03
0 5 10 15 20
number of points
Cw Cw b=0.35
Cw b=0.5
Tstnumber of points is 10 for b=0.35 and 12 for b=0.5. Moreover, it underlines the affirmation of the Shipflow manual [5], that Cw is increasing with the refinement of the grid.

4. Limitations of the computational method There are some restrictions to put on the final results of the computations [5]:
The amplitude of the stern wave could be overestimated, so the prediction of wave resistance can be inaccurate quantitatively. However, the comparison of wave resistance between alternative designs will be correctly predicted, i.e. the ranking will be accurate. The region of dead water and the breaking waves are due to an unstable process dependent on factors not included in the potential method. If the phenomenon of wave breaking is really important, the solution can even be divergent, but if the solution converges, there will be no indication on whether or not waves will break. That will cause some problems later on. Still, if the solution converges the wave pattern is mostly a good prediction even if the breaking waves are not taken into account. As said before, with transom stern, it is assumed that the ship is on planning and that the transom get dry. That means that low speeds can not be handled.
23/59

B. Inv
ry thin at the forebod
done, the problem of breaking stern waves
that was to change the lace of the LCB to see if the trim at speed which is quite severe on the existing yacht can be
reduced. But after a while changing the stern part seems to be a better strategy.
(1) Transom 0.4<Fn< 0.6, is the range of semi-displacement or semi-planning hulls [4]. Typical hulls at these speed are with a submerge transom at zero-speed. An advice on the wet area of the transom at zero speed is given [4], depending on the design speed (table 5). A submerge transom get the following advantage: As soon as the ship reaches a critical speed (generally around Fn = 0.4), the transom get dry; the water is following the curvature of the central plane until the stern wave (see Figure 7). The curve described by the water can be considered from a hydrodynamic point of view as the ship itself. That means that the Lwl is becoming fictively larger and that will decrease the wave resistance which will allow the ship to go faster On the other hand, there is a resistance component created by the lack of water pressure on the transom. The corresponding coefficient of resistance is Ctr = -Atr*ztr*2/(S*L*Fn²). (ztr is negative) This resistance coefficient is getting lower and lower with the speed! Table 5: Recommended Atr/Am
Fn Cp LCB Atr/AM
estigated hulls The existing catamarans are designed with displacement U-shape hulls: ve
y, the maximum sectional area a bit aft of midship, and a dry transom. The transom is designed so that the owner can have a step to go swimming. It is a sensitive area in the visual design. The LCB is placed at -5.5 and -6.5 % Lwl from midship.
1. Choice of parameters to test The hulls have been drawn from the one of the 53’. Then keeping the forebody unchanged, the aftbody has been changed in function of different parameters. As soon as the first computations has been appears. A breaking wave takes more energy than a normal one, which means that a hull that is followed by breaking waves is not good. The first idea to solvep
0.4 0.58 ; 0.62 -2 ; -3.5 0 ; 0.09 0.5 0.62 -3 0.14 0.6 0.63 -3.3 0.18
24/59

The transom beam will be adjusted so that the recommendation for transom area are followed as much as possible. Figure 7 shows how the flow should look like when the transom get dry:
us the deeper the transom draft the longer the efficient Lwl may be. Then, while changing
per the stern wave will be. That is why a straight
ththe transom draft, the transom beam has been adjusted so that the transom area was constant. Figure 7: Flow following the hull
25/59
(2) Longitudinal curvature of aft hull
Still water
As explain above, the water will follow the curvature of the ship to create the aft wave. That means also: the more convex the aft, the stee
d be consideredaft or even a concave aft coul . Moreover, the water passing along the hull is creating a pressure in function of the curvature of the bottom of the hull. This pressure is depending of the water speed along the hull. Along a concave hull, the flow will create a lift that will equilibrate the sinkage due to the reduction of the draft and which can not be avoided. Figure 8: Flow under a concave hull and pressure due to the flow

(3) Clearance Catamaran could take an advantage on monohull by creating a good interaction between the two bow waves. This interaction will obviously depend on the shape of the hulls and on the learance between them. It seems that the previous studies [3] did not find any optimum for
shape hulls around Fn = 0.5. Unfortunately, that is the kind of hulls on study. Anyway, tests on clearance will be run to see how these catamarans react. The parameters that will be studied are the draft at the backward perpendicular, the concavity of the hulls, the clearance. Then, a closer look will be put on the effect of changing of initial trim and of displacement. Finally, more than 200 calculations have been run and some others for the grid dependence study.
cthe clearance between two U-
26/59

2. Series o
o H16 is a hull with a dry transom 16cm above o H-16 is a hull with submerge transom 16cm under water o H-30 have a submerge transom 30cm under water
• 53 is the hull of the existing 53' catamaran. • The hulls with a star *, are the drafts from other hulls with displacement more closed
the design one. • H-16 C3 LCB is based on H-16 C3, but the LCB is more aft.
Table 6: Hulls types
name transom convex/concave others panel in transom
f hulls A set of 14 hulls have been designed with Rhino. Three hulls have a non-submerge transom, 6 are with a submerge transom at -16cm and 5 with the submerge transom at -30cm. In addition, the hull of the 53’ has been compiled. You can find the general characteristics of these hulls in the table 6. For more complete information, see appendices. The hulls are called as followed:
• H for hull • The number following the H is representing the draft at the aft perpendicular in cm:
o so H0, is a hull with aft touching the water
H0 non-submerge, 0cm convex 3 H16* non-submerge, 16cm convex draft H16 non-submerge, 16cm convex 3 H-16* submerge, -16cm convex draft H-16 submerge, -16cm convex 3 H-30* submerge, -30cm convex draft H-30 submerge, -30cm convex 4 H-16 C1 submerge, -16cm concave 5 H-16 C2 submerge, -16cm concave flat aft 7 H-16 C3 submerge, -16cm concave aft going backwards 7 H-16 C3 LCB submerge, -16cm concave LCB going more aft 7 H-30 C1 submerge, -30cm concave flat aft H-30 C3 submerge, -30cm concave aft going backwards 7 53 non-submerge, 16cm convex Existing catamaran 3
27/59

What is called “first convexity” is the fact that this hull has a horizontal part at the aft perpendicular; ith an aft horizontal and “third convexity” corresponds
3rd convexity
ity
“second convexity” is wto an aft with a negative angle. Figure 9: Hulls shapes
H-16 C3 1st convex
H-16C1
H-16 C1
H-16H16
H-16
C3
H-30 C3
28/59

29/59
d in the appendices.
1. On clearance* e monohull, the multihull can play on the interaction between the waves
te by the different hull. That is why the clearance s a very important parameter in the wave resistance of the catamarans. With the following tests, an optimum clearance could be found or at least the influence of the clearance on the wave resistance will be drawn. Wave resistance is a function of clearance as shown in Figures 10 and 11. For each hull, the same phenomenon in the results appears. The bigger the clearance, the smaller the Rw: it decreases until 2*Rw(monohull). Th g on the Froude number. The two curves are decreasing exponentially with the clearance. For Fn = 0.4, the changes in Cw are less important when the clearance is higher than 0.35 and for Fn = 0.6, the clearance is less influent if it is higher than 0.25. Obviously, a catamaran with a clearance of 1 cannot be sailed because of the seakeeping and ma consideration. Thus the solution is to take the smallest clearance which gives a not too high Cw. So the clearance should stay higher than 0.35. Figure 10: Effect of the clearance on Cw for two Fn
Figure 11: Effect of the clearance on Cw for two Fn * In that whole chapter, clearance means b
C. Effect of design parameters on hydrodynamic performance The complete results can be foun
Ocrea
n the opposite of th i
e effect of clearance is not really dependin
neuverability
Cw, hull H-16 C3
0,00E+00
1,00E-03
2,00E-03
3,00E-03
4,00E-03
5,00E-03
6,00E-03
0 0,2 0,4 0,6 0,8 1 1,2
clearance
Cw
Fn 0.4
mono,Fn 0.4Fn 0.6
Cw, Hull H-16
0,00E+00
1,00E-03
2,00E-03
3,00E-03
4,00E-03
5,00E-03
6,00E-03
7,00E-03
0 0,2 0,4 0,6 0,8 1 1,2
clearance
Cw
Fn 0.4
monofn 0.4Fn 0.6
monofn 0.6
, as explain in the nomenclature.

Looking at the Figure 12 and 13 leads to the same conclusion: The clearance should be mainta
Figure 12: Effec r two Fn
ined as high as possible. The influence of the clearance reduces when it is higher than0.25 for Fn = 0.6 and 0.35 for Fn = 0.4.
t of the clearance on trim fo
trim, Hull H-16b4
1,60E+00
4,00E-01
6,00E-01
8,00E-01
1,00E+00
1,20E+00
1,40E+00
trim
(deg
ree) Fn 0.4
mono,Fn 0.4Fn 0.6
2,00E-01
0,00E+000 0,2 0,4 0,6 0,8 1 1,2
clearance
Figure 13: Effect of the clearance on trim for two Fn
Trim, Hull H-16
0,00E+00
5,00E-01
1,50E+00
2,00E+00
2,50E+00
3,00E+00
0 0,2 0,4 0,6 0,8 1 1,2
clearance
(deg
ree) Fn 0.4
mono,Fn 0.4Fn 06
1,00E+00trim
monon 0.6F
30/59

To show the influence of the clearance on the wave pattern, the wave cut tool of Shipflow could have been used. The results are shown in Figure 14. Figure 14: Comparison of the wave cuts at the hull axis for the hull H-16 C3 with different clearances
he clearance compared are respectively 0,25 ; 0,3 ; 0,35 ; 0,4.
The higher the clearance the more smooth the stern wave. The interaction between the wave patterns of the two hulls is going further aft with the clearance. The Bernoulli waves are going ft with an angle of 19°, so that the previous remark is confirmed by theory. There is no
timum clearance for the wave pattern. The maximum wave height on that wave cut is decreasing with the clearance. But the maximum wave height might be in another place.
T
aop
31/59

It seems that the best catamarans with this kind of hulls are really the wider ones.
it will first capsize to the side or ters
nse and will result in a boat unlikely to pitchpole. That corresponds to a clearance equal to 2b
For ultimate performance, multihull designer Peter Wormwood once remarked, "When you've made the boat wide enough that you're not sure whether pitchpole, then you have the dimensions about right," but for maneuvering in tight quarand finding docking space, narrower beams still make more se
=0.5.
2. Effect of hull shape Different aft shapes have been tested. Looking separately to the tests done on the hulls, there is no noticeable change in the curvature of the graphs: The effect of the clearance and the displacement are comparable for all the hulls. But the efficiency of the different hull shapes will be compared in that section. A good method to compare them is to look at the wave patterns and some wave cuts. Normally, the smaller waves are created, the lower the wave resistance will be.
32/59

Figure 15: Comparison of the waves created by H-16 C3 at Fn= 0.4 H-16 C3 is the hull to the port side and the curves in red. H-16 C3 is compared with respectively H16 (Graph 1), H-16 (Graph 2) and H-30 C3 (Graph 3).
Graphs 1 and 3 should show the effect of the aftbody draft. Graph 2 shows the effect of the concavity. The four results are really close. However, the grids are different from one case to another: the transom grid in free surface is refined only for the hull H-16 C3. The grids used are always the closest to the one given by the grid dependency study as soon as the computations converge. Thus for all the case but H-16 C3, the real waves should be higher and steeper. The stern wave behind H16 is wider than behind the other hulls. Also the hull with the wave pattern the closest to H-16 C3 is H-30 C3. Both are with submerge transom and concave shape. The difference lies on the first stern wave which is steeper for H-30 C3.
Graph 1 Graph 2
Graph 3
33/59

Figure 16: Comparison of the waves created by H-16 C3 at Fn= 0.6 Comparison Fn = 0.4/0.6 (Graph 1); comparison at Fn=0.6 of H-16 C3 with respectiv(graph 2), H-16 (graph 3), H-30 C3 (graph 4). H-16 C3 is the hull star
ely H16 board and in green.
Sailing faster pushes the stern waves aft the ship and reduces the wave height (Graph 1).
The wave pattern of H16 (Graph 2) shows clearly the big stern wave that Yachts Industries wants to avoid. H-16 C3 is creating the smaller stern wave, although further aft, the three solutions with submerge transom leads to the same result. Graphs 2 and 4 should show the effect of the aftbody draft. Graph 3 shows the effect of the concavity.
Graph 1 Graph 2
Graph 3 Graph 4
34/59

But, in real life, sailing yachts can not go at a constant speed. So looking at the evolution of
h a
erge transom of -30 cm (H-30 C3). Figure 17: Comparison of the draft of the aftbodies on Rw for a range of speeds
That is quite obvious that the ships with transom are better at high speed (Figure 17). The curvature of the curves is the same for all ships with a submerge transom (Figure 17 and 18). That does not depend on the curvature of the aft body. In conclusion, only the fact to length the virtual Lwl is acting on the curve shape. The effect of the submerge transom is to move the resistance hump towards lower Fn; or in other words, to increase the effective Lwl compared to dry transom. This effect seems to be independent on hull curvature and transom shape. However, the amount of Rw will change with the hull curvature or transom shape, as shows the Figure 17 and 18. The hull with 30 cm submerge transom has a larger Rw than the hull with 16 cm submerge transom. Figure 18 shows that for the speed higher than Fn=0.45, the more concave the hull, the better efficiency.
Rw with the speed can have a great interest. This study has been done for a hull with drytransom, one convex hull with submerge transom at -16 cm (H-16), two concave hulls witsubmerge transom of -16 cm (H-16 C3 and H-16 C2) and one concave with a subm
Comparison of Rw for a range of speed
0,00E+00
5,00E-01
1,00E+00
1,50E+00
2,00E+00
2,50E+00
3,00E+00
3,50E+00
0,35 0,4 0,45 0,5 0,55 0,6 0,65 0,7 0,75
Fn
Rw
H16 H-16 C3 H-30 C3
35/59

Figure 18: Comparison of the concavity of the hulls on Rw for a range of speeds
Comparison of Rw for a range of speed
3,00E+00
Trim angle are to avoid: Besides the trim angle give more draft to the aft and so more drag, for a luxurious yacht it is quite embarrassing to have a ship which is trimming when sailing. Thus, the smaller the trim angle, the happier the sailors. The next Figures 19 and 20 are showing the trim plot against Fn with different hull shapes. Figure 19: Comparison of the concavity of the aftbodies on trim for a range of speeds
Here the effect of the suction due to the curvature of the aft is underline: at higher speed, the ship with a convex aft is trimming more and more while the ships with concave aft are going back to their lines. The most concave hull is the one with the smallest trim angle.
2,50E+00
0,00E+00
5,00E-01
1,00E+00
1,50E+00
2,00E+00
0,35 0,40 0,45 0,50 0,55 0,60 0,65 0,70 0,75
Fn
Rw
H-16 C2 H-16 C3 H-16
Comparison on trim in function of Fn
2,50
1,00
1,50
2,00
trim
0,00
0,50
0,30 0,40 0,50 0,60 0,70 0,80
Fn
H-16 C2 H-16 C3 H-16
36/59

Figure 20: Comparison of the draft of the aftbodies on trim for a range of speeds
ss. At the same time, at shows that even if the aft hull shape is concave, if it is too deep, the good effect from this
igure 21: Flow velocity on convex/concave hulls
Comparison on trim in function of Fn
0,00E+00
5,00E-01
1,00E+00
1,50E+00
2,00E+00
2,50E+00
3,00E+00
3,50E+00
4,00E+00
0,30 0,40 0,50 0,60 0,70 0,80
Fn
trim
H16 H-16 C3 H-30 C3
The figure 20 is showing that hulls with submerge transom trim the lethshape is lost: The hull H-30 C3 has a larger trim than the hulls with only 16cm transom stern. F
Here are the hulls H-16 C3, a concave hull (up) and H-16, a convex hull (down). The pressure and the flow velocity are link by Bernoulli equation: The higher the velocity the smaller the pressure. The green parts are for low velocity and red ones are for high velocity. Therefore there is a low pressure on the aft of the convex hull while there is a high pressure on the aft of the concave one. Moreover the pressure on H-16 C3 seems more symmetrical fore/aft. Thus that verify the assumption as the concave hull will create a lift at the aftbody and that can explain why concave hulls are trimming less.
37/59

3. On displacement The displacement is an influent parameter on the wave resistance. However, the hulls tested do not have the same displacement and comparing Cw as a function of displacement could lead to find a correction to adjust Cw as a function of displacement and obtain a series of resistance for a constant displacement. The set of hulls has been drawn quite quickly because of the lack of time and even if the hulls were as closed as possible to each others, keeping the displacement constant was really difficult when changing the other parameters. If some draft hulls are taking into account, the range of displacements given by Shipflow is from 5.86e-3 to 7.27e-3. Shipflow gives the displacement as a volume non-dimensionalized by Lpp3. Looking at Figures 22 and 23, the influence of the displacement on the wave resistance could be imagined. Figure 22: Influence of displacement on Cw
Cw function of disp
- 0.0052
7,00E-03
7,50E-038,00E-03
0E-03 7,50E-03
equation of the linear correlation y = 1.7363x
4,00E-034,50E-035,00E-03
5,50E-036,00E-036,50E-03
5,50E-03 5,70E-03 5,90E-03 6,10E-03 6,30E-03 6,50E-03 6,70E-03 6,90E-03 7,10E-03 7,3
disp
CW
Figure 23: Influence of displacement on Rw
Rw function of displacement
y = 496,24x - 1,8688
0,00E+00
5,00E-01
1,00E+00
1,50E+00
2,00E+00
5,50E-03 5,70E-03 5,90E-03 6,10E-03 6,30E-03 6,50E-03 6,70E-03 6,90E-03 7,10E-03 7,30E-03 7,50E-03
Displacement
Rw
38/59

It could be interesting if a correction could be found to adjust the hulls to the same displacement. The gradient from the previous scheme can not be used because the hulls do not have the same efficiency. But, if the gradient of Rw(disp) is the same for each hull, it could be used as a correction. From another point of view, these figures show the importance to have a well designed hull. The displacement increases strongly the resistance of the ship, and at the same time, it is the parameter the more likely to increase. A well designed hull could carry more weight for the same resistance as a less efficient hull. Some tests have been done to see the influence of the displacement on one hull. The results are shown in Figure 24 and 25. In order to change the displacement, the initial draft has been modified. The study could also have been done with different hulls similar in all the main particulars but the displacement. This method could give the effect on displacement independently of other parameters. The problem is that, drawing hulls with all parameters constant but displacement is very difficult and time consuming. And finally, for a boat already built changing displacement causes a change of draft; so this model is closer to reality. Problems are that changing the initial draft leads also to a change of the aft draft and of Atr,
re are no distinction two values that are of great importance as shown before. Then thebetween the resistance changes due to the displacement, the aft draft or the transom area. Anyway, the results give almost a perfect line: The heavier the ship, the larger the resistance.
39/59

Figure 24: Change of displacement for one hull and effect on Rw
Rw, hull H-16 C3y = 282,67x - 0,6773
1,20E+00
1,40E+00
6,00E-01
8,00E-01
1,00E+00
Rw
4,00E-01
2,00E-01
0,00E+005,80E-03 6,00E-03 6,20E-03 6,40E-03 6,60E-03 6,80E-03 7,00E-03
disp
Figure 25: Change of displacement for one hull and effect on Cw
Cw, hull H-16 C3 y = 0,8795x - 0,0006
4,50E-03
4,60E-03
4,70E-03
4,80E-03
4,90E-03
5,00E-03
5,20E-03
5,30E-03
5,40E-03
5,50E-03
5,80E-03 6,00E-03 6,20E-03 6,40E-03 6,60E-03 6,80E-03 7,00E-03
disp
Cw
5,10E-03
40/59

But compiling the results, even if Rw(disp) is a nice line, the gradients are differenthull to another. Finally, no correction will be done. Figure 26: Rw function o
from one
f displacement for three hulls
nt on . The st or
ake a
ade
ance will
These results could also be used to have an idea of the importance of the displacemecatamaran. In fact, the yard YI is constructing yachts with almost everything customonly constant is the hull: everything else from the interior arrangement to the type of mathe flybridge can change. So there could be a wide difference of weight in ships built with the same hull. The previous calculations can give an idea of the effect of an overweight on board. With another point of view, the boats which have the smaller gradient in the Figures 14, 25 and 26 are the ones which gain the less resistance for the same amount of weight. To mreal conclusion on the influence of the hull shape on the gradient, the study should be done with the whole series of hull, which has not been done. Here, the hull H-16 C3 supports better an overweight than the hull H-30 C1 and that the hull H16b; but no conclusion can be mfrom this observation. For 15% of overweight, the wave resistance is increasing by 10% so the total resistincrease by 6.66%. On a boat of 22t displacement, a change of 15% corresponds to 3t; it is reasonable to think that the owner adding more and more comfort in the yacht, this one will gain 15% of overweight. So the motors power has to be predicted with a margin of 7%.
Comparaison change due to dispH16: y = 353.82x - 0.8581H-16 C3: y = 282.67x - 0.6773
H-30 C1: y = 496.5x - 1.8011,80E+00
1,40E+00
1,60E+00
2,00E-01
4,00E-01
6,00E-01
8,00E-01
1,00E+00
1,20E+00
Rw
0,00E+005,80E-03 6,00E-03 6,20E-03 6,40E-03 6,60E-03 6,80E-03 7,00E-03 7,20E-03
displacement
H16 H-16 C3 H30 C1
Linéaire (H16) Linéaire (H-16 C3) Linéaire (H30 C1)
41/59

42/59
4. Comparison of the different hulls To compare the hulls, a clearance has been chosen and then the wave resistance and the viscous resistances have been computed. The results are given in Figures 27 and 28; both Figures are sorted by increasing Rt for Fn=0.4. The results show, as expected, that the viscous resistance is less important than the wave resistance and moreover that it is quite constant from one hull to another. So the initial hypothesis, that only wave resistance matters, was correct. Figure 27: Comparison of the hulls at Fn=0.4
Figure 28: Comparison of the hulls at Fn=0.6
Resistance at Fn 0.4
0,5
1,5
2
2,5
H-16C3
H-16C2
H-16C3
LCB
H-16C1
53 H-16 H16 H0 H-30C3
H-30C1
1
0
RwRf
Resistance at Fn 0,6
0
0,5
1
1,5
2
2,5
3
3,5
4
4,5
H-16C3
H-16C2
H-16C3
LCB
H-16C1
53 H-16 H16 H0 H-30C3
H-30C1
RwRf

Obviously the four hulls which arrive in the first places are H-16 C3, H-16 C2, H-16 C3l and
-16 C1: that corresponds to the four hulls with a submerge transom of 16cm draft from the
The 53’ seems to be also one of the best designs… In fact, the displacement used is lighter than the one of the other hulls and it is a longer boat. That means that the coefficient disp/Lwl3 is even lower and this one is of great influence on the wave resistance! The hulls with submerge trans e order for Fn = 0.4 and Fn = 0.6, but the resistances of the hulls with non-submerge transom increase more than the others with speed. That underlines the conclusion of the previous part on the aft shapes, which showed that a submerge transom reduces the hump of resistance around Fn = 0.5. The hulls have been designed with different displacements. In order to show that the differences in resistance are not only due to the change in displacement, the displacement can be added to the Figure 28. Figure 29: Comparison of displacement and wave resistance
e range of values than Rw, so that the figure is readable. The hulls ave been sorted by increasing displacements.
trary rder. So H-16 C3 is not only the most efficient hull but also the heaviest; thus she could be ven more efficient for the same displacement as H-16 C2. Also the order of efficiency which lace H-16 C3 before H-16 C2 is verified. On the contrary, H-30 C1 is the last one for the
resistance, but also for the displacement. It is then possible that her rank is only due to her overweight, although the difference in displacement is far lower than the difference in resistance and that an effect of the hull shape could be imagined.
Hmore concave to the less concave.
om are sorted in the sam
Resistance at Fn 0.4 + disp
6,00E-01
8,00E-01
1,00E+00
1,20E+00
1,40E+00
1,60E+00
0,00E+00
2,00E-01
4,00E-01
H-30 H-16 H-16 H-16 H16 53 H-16 H0 H-16 H-30 C3 C2 C3 C1 C3
LCB
disp
Rw
The displacement used is the one that Shipflow gives at the first iteration, multiplied by 100 in order to be in the samhThe hulls don’t arrive in the same order than with the previous figures (27 and 28) and the changes in displacement are small comparing to the changes in Rw. That shows that even if the displacement has an effect on Rw, other parameters are important. There are some remarks to be done: the two first hulls for the resistance arrive in the conoep
43/59

44/59
I think that the error due to the change of displacement from on hull to another is the most important of th
he coarser grids gave smaller resistance than the refine grid would have given. Thus the hull would have been sorted in the same order if they had been computed with the same grid and there is no need to complete the study by a computation of each hull with the coarser grid! Figure 30: Grids comparison on the different hulls
On Figure 30, the hulls are sorted as for Figures 26 and 27 by increase of wave resistance.
is study. On the other hand, the grids used are adapted to the hulls, therefore the grid will change from one hull to another. This could have influenced the final result. In fact, the hull with the lower total resistance calculated by Shipflow have been computed with the more refine grid (see Figure 30). That means that the final differences between the hulls are bigger in reality because t
Comparison of the grids
0
1
2
3
4
5
6
7
8
H-16C3
H-16C2
H-16C3
H-16C1
53 H-
LCB
16 H16 H0 H-30C3
H-30C1
num
ber o
f poi
nts
Rt Points transom

5. Trim The trim of the ship depends on the place of the weights on it. However, the place of the weights will be decided after the hull will be built! All the efforts will be put to make an
sults of the
equilibrate ship, but it could be interesting to know how the ship reacts to the trim. Then, the disposal of the weights can be more flexible knowing the consequences of an initial trim. Trim is measured in degree and positive trim is when the aftbody is down. The recomputations are in Figures 31 and 32. Figure 31: Cw when trimming
Figure 32: Sref when trimming
Cw, hull H-16 C3
7,00E-03
6,00E-03
0,00E+00
1,00E-03
2,00E-03
3,00E-03
4,00E-03
5,00E-03
0 0,5 1 1,5 2 2,5 3 3,5
initial trim
Cw
Sref when trimming, H-16 C3y = -0,0049x + 0,2728
2,62E-01
2,64E-01Sref
2,56E-01
2,58E-01
2,60E-01
0 0,5 1 1,5 2 2,5 3 3,5
initial trim
2,66E-01
2,68E-01
2,70E-01
2,72E-01
2,74E-01
45/59

Figure 33: Rw when trimming
resistance. But one degree trim corresponds in reality to an additional weight of 6t at the aft or to a displacement of 3t from the forebody to the aftbodchang
Figure 34: Effect of an initial trim on the final trim
The change of trim due to the speed is increasing with the initial trim. When there is an initial trim the transom will be more submerge; so maybe it is the same effect as the one which appears on the hulls with 30 cm of aft draft: the transom is too deep and that stops the good effect of submerge transom.
Putting an initial trim is not good for wave resistance, even if it reduces the wetted surface. For less than two degrees the wave resistance is increasing by nearly 1/3 of the previous
Rw, hull H-16 C3
8,00E-01
1,00E+00
1,20E+00
1,40E+00
Rw
0,00E+00
4,00E-01
6,00E-01
0 0,5 1 1,5 2 2,5 3 3,5
initial trim
2,00E-01
Final trim
0,00E+005,00E-011,00E+001,50E+002,00E+002,50E+003,00E+003,50E+004,00E+00
0 0,5 1 1,5 2 2,5 3 3,5
initial trim
trim
change final trim at speed
y. That is not a small e!
46/59

D. Conclusion
curve Rw(disp) differs from one hull to another. That eans that some hulls can support better an overweight.
are visible on the resistance hump and on the trim. The submerge transom enables move the hump of the wave resistance curve around Fn = 0.5 and a concave hull gives less trim when going faster than a traditional hull. Thus, the hulls that seem to be the more adapted for Fn between 0,4 and 0,6 are the concave one with submerge transom. Too large submerge transoms will increase wave resistance. For the studied case, -16 cm aft draft is more efficient than -30 cm. An initial trim raises the wave resistance and the difference of trim between zero-speed and the design speed; so it should be avoided and the general arrangement should be made so that the center of gravity of the ship is on the vertical of the center of buoyancy. However, changing the trim of the catamaran of one degree required an error of many tones. All the investigations from this chapter were based on the hydrodynamics, but looking at the maneuverability and the seakeeping will give another point of view of the problematic.
For this kind of hull shape, the clearance should be maintained as high as possible to create less interference between the wave patterns of the two hulls. The clearance affects the wave resistance, the trim and the wave height. A well designed hull enables to carry considerably more weight for the same resistance than a badly designed one. The gradient of the mThe effects of the hull shape
47/59

III. Practical design o
A catamaran can not have a clearance of 1, not even with a clearacatamaran of 15.25m long would be about 10.4m wide. Catproportions does not exist and there are reasons for it. A larseakeeping capabilities and leads to a bad maneuverability of stability, seakeeping and the maneuverability will be taken into acc
A. Ship motion The stability and the maneuverability are very important qualities f
1. Stability On a catamaran, the stability is always very high due to the spseakeeping could be a problem in rough or heavy seas. The stabil
e Simpson method for the hull H-16 C3. For a clearance of 0.3, that gives: GMt = 21.6m hich is enormous.
The figure 35 shows the relation between the clearance and the G proportional to the metacentric height, so the curve shows that nce the higher the righting arm for the same angle of heel. Figure 35: Stability, GMt
Actually, the higher the stability, the faster the ship will react to an exiting force. Thus a too large stability could lead to very high accelerations and that could be hazardous: People will be pushed one against another; and the fatigue in the structure will become a problem very early. So the clearance should be maintained at reasonable values.
ns is not feasible in reality: nce of 0.35. For instance, a amaran with that kind of ge clearance decreases the the ship. That is why the ount below.
or a cruising yacht.
acing of the hulls. But the ity has been calculated with
An optimum hull based on the conclusions of the previous Secti
thw
Mt. The righting moment isthe wider the cleara
GMt for both hulls in water
0
10
20
30
40
50
60
70
0 0,1 0,2 0,3 0,4 0,5 0,6
clearance
GM
t (m
)
48/59

2. Seakeeping The seakeeping of a catamaran is equivalent to that of one of the demi-hulls taken as
onohull when considering pitch, heave and the motion in head sea. But there is a resonance
axis represents the acceleration in
of frequencies during a long time
. The Lloyds classification and the ISO rules give some advices on this problem (ISO-2631).
min the motion of the ship if the wavelength is twice the clearance between the hulls. The sails improve a lot the seakeeping in damping the effect of the waves. On cruising yachts, avoiding motion sickness is important. That is why the accelerations in the yacht should be compared with the advices from ISO (figure 36). Figure 36: Zone of motion sickness; ISO 2631 [9]
Figure 36, the horizontal axis represents the peak frequency of the movement in Hz and the vertical
m/s2. The human body can not stand too high acceleration at a special range
without getting sea sick. This range of frequencies is to be avoided
49/59

If it is assumed that the yacht follows the wave because of a high stability, the accelerations not on the clearance between the hulls. But there is a large
Figure
it comfort of the
roll. The natural frequency of the largest. Thus, the
body, but also the
peak period
Fre-quency
depend only on the wave anddifference with a monohull: a monohull is not likely to follow the steepness of the waves due to its smaller stability. The heel motion will follow the wave height but the roll motion will not follow the slope. The waves in figure 37 are the most common in the North Sea. The values come from a table of the statistical representation of the waves containing the wave height and the peak period. It is true that it is maybe not the place where the yacht will mostly be, but that can give an dea of the yacht reactions. i
37: Wave acceleration
The waves with a period of 6s have a frequency of 1.04Hz which is too high to create a discomfort to the passengers of the yacht. But the waves T8H2 and T11H4 arrive at the limof the discomfort causing after 8 hours (see figure 36); that is still ok for thesailors. Another cause to the motion sickness is the natural frequency of a body is so that if it is excited at this frequency, its reactions are frequencies to be avoided are not only the ones which act on the humannormal frequencies of the natural waves. The influence of the clearance on the natural frequency of roll will be studied.
name significant wave height
T8H2 2m 8s 0.78
T6H2 2m 6s 1.04
T11H4 4m 11s 0.57
Waves acceleration
-1,5
-1
1,5
10 12
time
acce
lera
tion
(m/s
2) 0,5
1
T8H2T6H20
0 2 4 6 8
-0,5
T11H4
Waves studied: T is the period in seconds, H is the significant wave height in meters.
50/59

The natural fre es with the clearance. This is coming from the equation of
nal axis through the
m is the mass of the ship B is the damping coefficient C is the hydrostatic restoring force coefficient (spr The damping coefficient can be considered as negligibequation could be written: (A+M) θ’’ + C θ =F For typical hull form, A is small compared to M [7] and so A+M can be replaced by M. A is depending on the hull cross section shape: the more circulTo find the natural frequency, F is taken as zero. Then the ωN = (m*g*GMt/Ir)1/2 and so TN = 2 π / ωN Thus, the roll frequency is depending on GMt and Ir: frequency; at the same time the higher Ir, the lower the the bigger GMt. Ir is more depending on the general arra ights putting far from the center of gravity, i.e. high, down, or in the hull, damp the roll. Then, the wider the clearance, the more possibilities there are to put weight far from the center axis; on the other hand, the more space there will be in the mess and so probably the more weight will be put in the middle. So there are different methods to modify the natural roll frequency, and it is possible to do so in the design that the natural roll equency is avoiding the zone of seasickness and of resonance with the frequencies of the waves. Roll is not the only problem of seakeeping. Often the pitching problem is more important. It can even create some slamming under the mess and that is really to avoid. The concave aft gives a lift on the aft body. That could lead to some violent pitching in rough sea: if the forebody is not anymore in water due to a wave, the lift due to the concave shape will still be pplied on the aftbody and so a non-equilibrium will be created and the forebody will be ushed into the water. Then, the pressure on the forebody will push it out of water, etc. And o the yacht will pitch violently and regularly. This pitching could induce slamming on the ftbody. The slamming is really hazardous because it fatigues the structure. For a yacht that oes faster than 20 kts, that could be hazardous, but normally it would stay reasonable for our
catamaran.
quency of roll changmotion that can be written as follows. (A+M) θ’’ + B θ’+ C θ = F
here θ is the angle of rollW
A is the added mass M corresponds to the mass moment of inertia, Ir = ∫ x2 dm
x is the distance between the point observed and the longitudi center of gravity
ing constant), here g*m*GMt
le for the equation of roll. So the
ar it is the smaller the A. natural frequency will be:
The higher GMt the higher the roll frequency. The wider the clearance, ngement, so that the we
fr
apsag
51/59

3. Maneuverability For the maneuverability, the two hulls of the catamaran are both an advantage and a disadvantage. When going with motors, the fact to have a motor on each hull, far away from
l be, the bigger will be the moment between the thrusters, but the ider will be the turn around. So a compromise has to be done.
have an instable course keeping in sea waves. When a wave is oment will be higher if the clearance is wide.
Even a small change in angle in the course leads to big movement of the hull.
each other gives a better moment so the boat will turn more easily. But on the other hand, to turn the catamaran, the exterior hull has to move a lot faster than the interior one so itsresistance will be much larger, creating a moment acting so as to increase the turning radius. The wider the clearance wilwA very wide catamaran canhitting one of the hull, the m
52/59

B. Final hull
are the two concave ones with a submerge transom at -16cm. rences between the results of these two hulls. Thus it is not
ecessa re disturbances in the flow. 0% Lwl of beam. Looking
e centimeters, the wave resistance will decrease onseq
The best hull shapes testedThere are almost non diffen ry to have an aft going downwards, which will cause moFor the clearance, the most common yachts have approximately 5at the figures (10, 11), it is a range of clearance which influences a lot the wave resistance: If the clearance is enlarged of only somc uently. That is true until b = 0.35. But to have a too wiproblems about maneuverability and
de yacht will create the
hat is lready a lot. In the other hand, it makes already a big gain in wave resistance comparing to
promise
seakeeping which were already discussed. A clearance of 0.26 corresponds for the kind of catamaran studied to a beam over all of 65% Lwl wathe existing catamarans which run with a clearance around 0.17. Moreover, if the clearance is wide, there is more structure and more space inside the boat; so that the total weight of the catamaran will increase. Thus, Table 7 has been done so the owners can make his own decision doing a combetween different parameters described in this thesis.
53/59

54/59
Table 7: Effect of design parameters on different assessment variables
NS= Not Studied
Desire from the owner Design parameters owner clearance, b submerge/dry transom convex/concave l trim displacement initia
owner a good boat The wider, the more place.
Don’t really mind as soon as it is nice looking. Don’t mind nitial trim
Big: Thcan enbetter.
e more stuff ter the boat the
No i
Resistance The smallest
Decreases exponentially with b Reach a limit: Rw (monohull)
Submerge transoms reduce the hump in Rw(v) curve Advices on Atr/AM have to be followed, so H=-16cm.
The concave hullsmore efficient s with the trim are Increa
displacses linearly with ement Increase
trim No trim Same behavior as for Rw NS
A concave hull lift yacht back to her The more costronger the phenomenon
s with the trim
the lines
ncave the NS Increase
stability Good
Increases with b However, the lost of stability when one hull goes out of water increases with b
NS NS Decreadisplac
ses with ement NS
seakeeping Good No motion sickness
Natural roll frequency increases with b NS NS NS NS
maneuverability Good Decreases with b Lost of stability when b increases
NS NS iso
More dgives m
placement re inertia NS

IV. s and discussion his study gives a good idea of the effect of the clearance on the wave resistance for a
the breaking waves.
rameter was changed, others change at e same time. Thus it is difficult to be sure that a change in efficiency is due to one specific
arameter and not from all of them. This study has been done with a 50’ catamaran, but in fact, all the calculations have been run without dimension. So the conclusions of the thesis could be applied to boats of different length. The difference will be that to have a longer yacht enables to reduce the relative length and the slenderness of the hulls. Also, the same Fn:s correspond to a higher speed. Thus there is no reason to design a longer yacht with the proportion of this one and so the study will be inaccurate. Anyway, the tendency for clearance or trim will stay the same and the longer the yacht the better it will be. Trying to run a parametrical study was probably the right method, although it was difficult by hand. Maybe if a program can be written to design yacht changing parameters one by one, the effect of each parameter could be investigated more properly. However, I am not sure that changing only one parameter could be done. Shipflow was well adapted to calculate the hydrodynamic behaviors of the catamarans. The results could be improved if the same tests are done with a Volume of Fluid or Level Set Techniques software which can handle breaking waves. With such software, the same grid could have been used for all the yachts. Unfortunately, these softwares are too slow and still on studies. Rhinoceros is maybe not the best software to design hulls, but it was available in the firm and had enough capabilities to design the different hulls. Everybody agree on one thing about catamarans: they can not handle an overweight without loosing all there advantages in speed efficiency! That means that from a hydrodynamic resistance point of view, catamarans are efficient only if a light weight is kept. That is not really the case in cruising yachts, and so even if little improvements can be done by changing the hulls shape, a bit of overweight will destroy all the new improvements. Thus the best thing to do to really improve the yachts could be a real follow-up of the weights which are entering in the yachts and then a maximal reduction of them.
ConclusionTcatamaran with U-shape hulls. However, no optimum clearance exists and so no optimum was found. Moreover, the study on the effect of clearance on maneuverability and seakeeping is essentially qualitative, so no value enables to make a compromise on clearance. This report shows two ways to improve the wave resistance by the design of the aftbody: To include a submerge transom and to design a concave aftbody. The improvements are on the reduction of the resistance hump and of the trim. The negative effects of an increased displacement and of an initial trim on the resistance of the yacht have been underlined. So a new kind of design can be purposed even if there are still some data missing. The two biggest sources of errors were the impossibility to keep the displacement constant in changing other parameters and to keep the grid constant as recommended by the grid dependence study, due to The fact that the hulls have been designed by hand with Rhinoceros and not by an automat leads to a non perfect parameters study: When one pathp
55/59

56/59
V. Further work and recommendations The part o neuver ity and seakeeping of the catam ore important and ore acc ate, but the aim of this study was just to give a rough idea of the consequences of increasing the clearance. To continue this thesis, a study on the forebody shape could be done, to improve the resistance further and maybe the seakeeping. The accuracy of the results could be improved in atic generator of hulls. In that case, the displacement would have been sim lls. From a t oin ew, one could imagin e model testing for the different kind of hulls to valid esu f differences in maneuverability character iou at will never be don ause t pote customer does not care about hull efficien nough so much money in it.
n ma abil aran could have been m m
retical p
ics. Obv
ur
t of viate the r
sly th
drawing the hulls to test with an autom
e to do somind the
e bec
ilar for all the hu
ntial
heo
istlts and to
he cy e to spend

57/59

58/59

VI. Bibliography Books: [1] Ocean engineering, J.J.Jensen et al.: Seakeeping [2] Principles of Yacht Design, Lars Larsson and Rolf E Eliasson: Technical approach of mono-hull design [3] Multi-Hull Ships, Victor A. Dubrovsky and Anatoly Lyakhovitsky: Technical approach of multi-hull design [4] Ship resistance and Flow, Lars Larsson: Course on ship resistance [5] Shipflow User Manual, Flowtech International AB [6] Wave-Induced Loads and Ship Motions, Lars Bergdahl Articles: [7] Wave Reduction by S-Catamaran at Supercritical Speeds, Xue-Nong, Chen, Som, D.Sharma, and Norbert Stuntz [8] Catamaran Seakeeping Prediction, Rian van’t Veer [9] Motion Sickness Prediction Of A Wave Piercing Catamaran At Seas, Chih-Chung FANG, John S.Y. CHANG, Mu-Yen CHEN Website: [10] Qualitative recommendations on main dimension for catamarans: http://www.2hulls.com/archive/Gen%20Article/Catapaulting.html
59/59

Annexes
ANNEXES 1
Hulls characteristics 2 H0 2 H16b 2 H-16b 3 H-16bb 3 H-16b4 4 H-16b4l 4 H-30bb 5 H-30b4 5
Weight estimation 6
Shipflow command 8
Shipflow calculations 9 53’ 9 H16 9 H16b 9 H0 10 H-16 11 H-16b 12 H-16bb 13 H-16bbb 14 H-16b4 15 H-16b4l 16 H-30bb 17 H-30b3 17 H-30b4 18 Comparison of hulls 19
Seakeeping 20 Coodinate of B 20 Stability 20 Roll period 20
04/02/2005 1/20

Hulls characteristics
H0 Volume Displacement 1.04E+10 0.000 Center of Buoyancy 7883.14 0 -288.052 -3.51140737 0.000 Wetted Surface Area 3.03E+07 0.000 Waterline Length 14731.7 0.000 Maximum Waterline Beam 2026.98 0.000 Water Plane Area 2.19E+07 0.000 Center of Floatation 8290 0.000 AM 1.18628 0.000 Cp 0.59290151 0.000 Cb 0.44686757 0.000 T 776.5 0.000 Lwl/Bwl 7.26780728 0.000 Bwl/T 2.61040567 0.000 Lwl/D^0.33 6.76E+00 0.000 H 0
H16b Volume Displacement 1.01E+10 -2.215Center of Buoyancy 7766.6 0 -287.004 -4.64626209 -1.478Wetted Surface Area 2.97E+07 -2.151Waterline Length 14212.5 -3.524Maximum Waterline Beam 2043.27 0.804Water Plane Area 2.15E+07 -1.745 -100.000AM 1.203114 1.419Cp 0.59254034 -0.061Cb 0.4366688 -2.282T 799 2.898Lwl/Bwl 6.95576209 -4.294Bwl/T 2.55728411 -2.035Lwl/D^0.33 6.57E+00 -2.801H 720
04/02/2005 2/20

H-16b Volume Displacement 1.06E+10 2.225Center of Buoyancy 8041.24 0 -286.976 -4.40732897 2.006Wetted Surface Area 3.09E+07 1.766Waterline Length 14779.7 0.326Maximum Waterline Beam 2019.29 -0.379Water Plane Area 2.21E+07 0.939Center of Floatation 8381.99 0 -2.61E-04 1.110AM 1.17205 -1.200Cp 0.61145741 3.130Cb 0.45912841 2.744T 773 -0.451Lwl/Bwl 7.31925578 0.708Bwl/T 2.61227684 0.072Lwl/D^0.33 6.73E+00 -0.407H 160 Ba 904 Atr 1.36E-01 1.16E-01 Ctr 5.96E-04
H-16bb Volume Displacement 1.01E+10 -3.003Center of Buoyancy 7801.17 0 -279.299 -2.78300642 -1.040Wetted Surface Area 3.02E+07 -0.294Waterline Length 14779.7 0.326Maximum Waterline Beam 2039.59 0.622Water Plane Area 2.20E+07 0.685Center of Floatation 0 -3.06E-05 AM 1.090256 -8.095Cp 0.62371318 5.197Cb 0.429091107 -3.978T 777 0.064Lwl/Bwl 7.246407366 -0.294Bwl/T 2.624954955 0.557Lwl/D^0.33 6.85E+00 1.351H 160 Ba 904 Atr 1.31E-01 1.20E-01 Ctr 5.87E-04
04/02/2005 3/20

H-16b4 Volume Displacement 9.71E+09 -6.320Center of Buoyancy 7694.39 0 -273.419 -2.06052897 -2.394Wetted Surface Area 3.01E+07 -0.621Waterline Length 14779.7 0.326Maximum Waterline Beam 2044.05 0.842Water Plane Area 2.23E+07 1.977Center of Floatation 8392.71 0 -1.76E-05 1.239AM 1.118212 -5.738Cp 0.58732772 -0.940Cb 0.41298429 -7.582T 778 0.193Lwl/Bwl 7.23059612 -0.512Bwl/T 2.62731362 0.648Lwl/D^0.33 6.93E+00 2.533H 161 Ba 931 Atr 1.68E-01 1.50E-01 Ctr 7.58E-04
H-16b4l Volume Displacement 1.02E+10 -1.128Center of Buoyancy 7838.22 0 -277.791 -3.0336881 -0.570Wetted Surface Area 3.12E+07 2.925Waterline Length 14779.7 0.326Maximum Waterline Beam 2079.68 2.600Water Plane Area 2.31E+07 5.449Center of Floatation 8534.92 0 -1.13E-04 2.954AM 1.147474 -3.271Cp 0.60406898 1.884Cb 0.42840376 -4.132T 778 0.193Lwl/Bwl 7.10671834 -2.216Bwl/T 2.67311054 2.402Lwl/D^0.33 6.81E+00 0.706H 162 Ba 1099 Atr 1.92E-01 1.67E-01 Ctr 8.44E-04
04/02/2005 4/20

H-30bb Volume Displacement 1.07E+10 3.642Center of Buoyancy 8108.64 0 -285.618 -4.86335988 2.861Wetted Surface Area 3.12E+07 2.790Waterline Length 14779.7 0.326Maximum Waterline Beam 2017.16 -0.484Water Plane Area 2.19E+07 0.276Center of Floatation 8321.64 0 -2.98E-05 0.382AM 1.090256 -8.095Cp 0.666447118 12.404Cb 0.465385525 4.144T 774 -0.322Lwl/Bwl 7.326984473 0.814Bwl/T 2.606149871 -0.163Lwl/D^0.33 6.70E+00 -0.863H 300 Ba 904 Atr 3.31E-01 3.04E-01 Ctr 2.69E-03
H-30b4 Volume Displacement 9.55E+09 -7.817Center of Buoyancy 7698.94 0 -272.569 -2.09131444 -2.337Wetted Surface Area 2.93E+07 -3.365Waterline Length 14779.7 0.326Maximum Waterline Beam 2018.78 -0.405Water Plane Area 2.11E+07 -3.598Center of Floatation 8106.63 0 -5.75E-05 -2.212AM 1.068886 -9.896Cp 0.604608318 1.974Cb 0.413595259 -7.446T 774 -0.322Lwl/Bwl 7.321104826 0.733Bwl/T 2.608242894 -0.083Lwl/D^0.33 6.97E+00 3.085H 305 Ba 630 Atr 1.93E-01 1.80E-01 Ctr 1.70E-03
04/02/2005 5/20

Weight estimation Weight quantity total percentage Principal structure Hull 15.975792 2.34E+02 3738.33533 17.4757489 structure hull 2990.66826 13.9805991 deck 10.8864 14.4 156.76416 0.73283182 Anchor 230.4864 1 230.4864 1.07746419 deck equipment 0 0 water and gasoil tanks 30 6 180 0.84145335 waterproof bulkhead 4 0 0 0 0Manoeuvrability Rudders 9.072 2 18.144 0.0848185 equipment 0 0 0 0Painting exterior 1 2.34E+02 234 1.09388936 interior 0 0 0 0Mast Mast 800 1 800 3.73979268 Boom 200 1 200 0.93494817 Hydraulics 0 0 sails 160 1 160 0.74795854 0 0 0 0Interior layout Isolating 1500 1 1500 7.01211127 bois plein 680 4.5 3060 14.304707 bois agglomere 500 2 1000 4.67474085 cabins 33.44 4 133.76 0.62529334 crew cabins 33.44 1 33.44 0.15632333 kitchen 200 1 200 0.93494817 Living room+ square 161.53 1 161.53 0.75511089 ventilators 0 0 Climatisation 0 0 0 0Comfort Fridge 50 1 50 0.23373704 ice maker 20 1 20 0.09349482 wash machine 20 1 20 0.09349482 dish machine 20 1 20 0.09349482 kitchen ventilator 20 1 20 0.09349482 TV 9.072 6 54.432 0.25445549 0 0Plumbery desalt machine 70 1 70 0.32723186 tubes 0 0 water heater 13 1 13 0.06077163 0 0Machinery room isolation 400 1 400 1.86989634 ventilation 3 2 6 0.02804845 support 100 1 100 0.46747408 motors 260 2 520 2.43086524 propeller 4 2 8 0.03739793
04/02/2005 6/20

tree 0 0 generators 163 1 163 0.76198276 hydraulics for equipment 50 1 50 0.23373704 0 0Electricity batteries 50 24 1200 5.60968902 cables 1000 1 1000 4.67474085 armoires 300 1 300 1.40242225 transformateur 54 1 54 0.25243601 chargeurs 8 2 16 0.07479585 convertisseur 9 2 18 0.08414534 battery motor 10 3 30 0.14024223 electrics winches 6 2 12 0.05609689 0 0Electronics chart table 0 0 helm station 100 1 100 0.46747408 0 0Security rescue boats 100 1 100 0.46747408 annexe 450 1 450 2.10363338 0 0People and luggage 150 8 1200 5.60968902 0 0accastillage general 300 1 300 1.40242225 hublot 300 1 300 1.40242225 0Tanks black water 1.025 300 307.5 1.43748281 grey water 1.01 0 0 tap water 1 800 800 3.73979268 hot water 1 40 40 0.18698963 gasoil tank 0.85 900 765 3.57617675 TOTAL without liquids (kg) 21391.5602 TOTAL without liquids (t) 21.3915602 TOTAL with liquids 80% (t) 22.9215602 Weight maximum (+25%) 26.7394502
04/02/2005 7/20

Shipflow command Example of a Shipflow command file : H-16bs1 xflow titl( titl= "cata") prog( xmesh, xpan ) hull( catamaran ) offs( file = "H-16bb.txt ") vshi( fn = [0.45], rn = [0] ) end xmesh body( expanel = 2, grno = 1, offsegroup = "cathull", ytra = -0.3, station = 30, point = 7 ) body( expanel = 2, grno = 2, offsegroup = "cathull", ymir, ytra = -0.3, station = 30, point = 7 ) free( grno = 3, nbd2 = 1, ibd2 = [1], poin = 17, stau = 11, stam = 25, stad = 35, str1 = 1, df1 = 0.03, xdow = 2.3 ) free( grno = 4, nbd4 = 1, ibd4 = [2], point = 12, y2side = 0.0, stau = 11, stam = 25, stad = 35 ) tran( grno = 5, point = 3, nbd1 = 2, ibd1 =[1,2], stad = 35 ) end
04/02/2005 8/20

Shipflow calculations Rw= Cw*0.5*1025*9.81*Sref*Fn2
Wave heigth is non dimensionilized by Lpp. Convergence is the number of iteration needed for the convergence.
53’ clearance = 0.17 Fn Cw Waves e-2 Sref trim Rw 0,39 5,45E-03 3,55 2,58E-01 9,69E-01 1,13E+00
H16
catamaran Sref clearance Cw Wave height e-2 trim Rw convergence 2,64E-01 0,25 6,19E-03 2,75 1,33E+00 1,31E+00 12 0,3 5,62E-03 2,58 1,19E+00 1,19E+00 12 0,35 5,27E-03 2,53 1,10E+00 1,12E+00 12 0,38 5,12E-03 2,4 1,06E+00 1,09E+00 11 0,4 5,04E-03 2,34 1,04E+00 1,07E+00 11 0,42 4,95E-03 2,34 1,02E+00 1,05E+00 11 0,5 4,77E-03 2,34 9,67E-01 1,01E+00 11 1 4,28E-03 2,27 8,00E-01 9,09E-01 11 Mono 1,32E-01 4,76E-03 2,93 9,87E-01 1,01E+00 10
H16b Fn = 0,4 Sref clearance Cw Wave height e-2 Trim R w convergencecata 2,68E-01 0,3 5,66E-03 2,61 1,24E+00 1,22E+00 12 0,35 5,30E-03 2,62 1,15E+00 1,14E+00 12 0,38 5,15E-03 2,36 1,11E+00 1,11E+00 0,4 5,07E-03 2,29 1,09E+00 1,09E+00 12 0,45 4,92E-03 2,29 1,04E+00 1,06E+00 12 0,5 4,80E-03 2,3 1,01E+00 1,03E+00 12 1 4,32E-03 2,22 8,37E-01 9,30E-01 11 mono 1,34E-01 4,87E-03 2,9 1,04E+00 1,05E+00 11
Fn= 0,6 Sref clearance Cw Wave height e-2 Trim Rw convergence cata 2,68E-01 0,2 0,00E+00 div
0,3 6,70E-03 5,01 3,36E+00 1,44E+00 maxi it. Periodique
0,35 6,75E-03 5,55 3,37E+00 1,46E+00 0,4 6,77E-03 5,54 3,34E+00 1,46E+00 0,5 6,75E-03 4,79 3,26E+00 1,45E+00 1 7,56E-03 3,64 2,14E+00 1,63E+00 Mono 1,34E-01 0,00E+00 div
04/02/2005 9/20

clearance 0,35
Sref Fn Cw trim wave height Rw
2,68E-01 0,4 5,30E-03 1,15E+00 2,62 1,14E+002,68E-01 0,45 7,56E-03 2,14E+00 3,64 2,06E+002,68E-01 0,5 7,90E-03 2,75E+00 4,69 2,66E+002,68E-01 0,55 7,39E-03 2,99E+00 5,22 3,01E+002,68E-01 0,6 6,75E-03 3,37E+00 5,55 3,27E+00
Fn=0,4 clearance 0,3 Sref ini trim Lcb Cw Wave height e-2 trim Rw V (disp) 2,68E-01 0 5,23E-01 5,66E-03 2,61 1,24E+00 1,22E+00 6,18E-032,70E-01 0,5 5,38E-01 5,82E-03 2,80E+00 1,29E+00 1,27E+00 6,27E-032,73E-01 1 5,53E-01 6,07E-03 2,99 1,35E+00 1,33E+00 6,39E-032,77E-01 2 5,84E-01 6,88E-03 3,40E+00 1,48E+00 1,54E+00 6,69E-032,79E-01 3 6,12E-01 8,01E-03 3,74 1,62E+00 1,80E+00 7,04E-03
Fn=0,4 clearance 0,3 Sref zori displacement Lcb Cw trim Rw 2,68E-01 6,18E-03 5,66E-03 1,24E+00 1,33E+00 2,70E-01 0,0005 6,27E-03 5,24E-01 5,66E-03 1,22E+00 1,36E+00 2,73E-01 0,0011 6,39E-03 5,24E-01 5,75E-03 1,23E+00 1,40E+00 2,81E-01 0,0026 6,69E-03 5,26E-01 5,93E-03 1,25E+00 1,51E+00 2,89E-01 0,0045 7,07E-03 5,27E-01 6,23E-03 1,28E+00 1,64E+00
H0 Fn = 0,4 Sref clearance Cw Wave height e-2 Trim Rw convergencecata 0,28 5,89E-03 3,05 1,21E+00 1,30E+00 13 0,3 5,60E-03 3,01 1,14E+00 1,23E+00 13 2,74E-01 0,33 5,38E-03 2,9 1,09E+00 1,18E+00 13 0,35 5,26E-03 2,79 1,06E+00 1,16E+00 13 0,38 5,12E-03 2,78 1,02E+00 1,13E+00 13 0,4 5,04E-03 2,78 1,01E+00 1,11E+00 13 0,5 4,78E-03 2,83 9,37E-01 1,05E+00 13 1 4,37E-03 2,87 7,95E-01 9,64E-01 13 mono 1,37E-01 4,53E-03 3,32 8,96E-01 9,98E-01 12
Fn = 0.6 Sref clearance Cw Wave height e-2 Trim Rw cata 0,2 0,3 6,21E-03 4,73 2,99E+00 3,08E+00 2,74E-01 0,35 6,21E-03 5,26 2,97E+00 3,08E+00 0,4 6,17E-03 5,32 2,93E+00 3,06E+00 0,5 6,15E-03 4,67 2,85E+00 3,05E+00 1 6,13E-03 2,79 2,76E+00 3,04E+00 mono 1,37E-01 6,06E-03 2,79 2,88E+00 3,01E+00
04/02/2005 10/20

H-16 cata Sref clearance Cw Wave height e-2 trim Rw convergenceFn = 0,4 2,83E-01 0,25 6,61E-03 3,54 1,15E+00 1,51E+00 15 0,3 6,12E-03 3,63 1,04E+00 1,39E+00 15 0,35 5,81E-03 3,49 9,74E-01 1,32E+00 0,38 5,68E-03 3,5 9,44E-01 1,29E+00 0,4 5,61E-03 3,49 9,28E-01 1,28E+00 0,45 5,47E-03 3,47 8,96E-01 1,25E+00 0,5 5,37E-03 3,56 8,71E-01 1,22E+00 1 5,00E-03 3,85 7,57E-01 1,14E+00 mono 1,42E-01 5,05E-03 3,8 8,12E-01 1,15E+00 13
04/02/2005 11/20

H-16b Fn = 0,4 Sref clearance Cw Wave height e-2 trim Rw convergencecata 2,81E-01 0,2 6,26E-03 3,92 1,13E+00 1,42E+00 16 0,3 5,18E-03 3,27 9,03E-01 1,17E+00 14 0,33 4,98E-03 3,1 8,58E-01 1,13E+00 13 0,35 4,88E-03 3,08 8,34E-01 1,10E+00 13 0,38 4,75E-03 3,08 8,05E-01 1,07E+00 12 0,4 4,68E-03 3,09 7,88E-01 1,06E+00 12 0,45 4,54E-03 3,14 7,56E-01 1,03E+00 12 0,5 4,45E-03 3,2 7,32E-01 1,01E+00 13 1 4,09E-03 3,38 6,27E-01 9,25E-01 12 mono 1,41E-01 4,17E-03 3,47 6,74E-01 9,44E-01 13
Fn = 0,6 Sref clearance Cw Wave height e-2 trim Rw convergencecata 2,81E-01 0,15 div 0,2 div 0,3 5,71E-03 4,25 2,59E+00 2,91E+00 0,35 5,68E-03 4,86 2,56E+00 2,89E+00 0,4 5,66E-03 4,99 2,53E+00 2,88E+00 0,5 5,62E-03 4,47 2,47E+00 2,86E+00 1 5,59E-03 2,97 2,39E+00 2,85E+00 mono 1,41E-01 5,53E-03 2,84 2,46E+00 2,81E+00
clearance 0,35 Sref Fn Cw Rw 2,72E-01 0,3 1,86E-03 2,29E-012,72E-01 0,4 4,91E-03 1,08E+002,72E-01 0,45 6,82E-03 1,89E+002,72E-01 0,5 7,19E-03 2,46E+00
clearance 0,3 Sref Fn Cw trim Rw 2,72E-01 0,4 5,18E-03 9,03E-01 1,13E+002,72E-01 0,45 6,86E-03 1,47E+00 1,90E+002,72E-01 0,5 6,81E-03 1,89E+00 2,33E+002,72E-01 0,55 6,12E-03 2,08E+00 2,54E+002,72E-01 0,7 4,04E-03 2,09E+00 2,71E+00
04/02/2005 12/20

H-16bb Fn = 0,4 Sref clearance Cw Wave height e-2 trim Rw cata 2,72E-01 0,25 5,59E-03 3,26 7,80E-01 1,23E+00 0,3 5,11E-03 3,09 6,77E-01 1,12E+00 0,35 4,82E-03 3,04 6,11E-01 1,06E+00 0,4 4,64E-03 3,02 5,69E-01 1,02E+00 0,45 4,52E-03 3 5,41E-01 9,92E-01 0,5 4,44E-03 2,98 5,22E-01 9,74E-01 1 4,13E-03 3,42 4,45E-01 9,05E-01 mono 1,36E-01 4,30E-03 3,34 4,86E-01 9,43E-01
Fn = 0.6 Sref clearance Cw Wave height e-2 trim Rw cata 2,72E-01 0,2 3,48 0,25 5,29E-03 3,5 2,10E+00 2,59E-01 0,3 5,24E-03 4,29 2,05E+00 2,57E-01 0,35 5,16E-03 4,8 2,01E+00 2,53E-01 0,4 5,11E-03 4,86 1,97E+00 2,51E-01 0,5 5,03E-03 4,38 1,90E+00 2,47E-01 1 4,57E-03 2,79 1,53E+00 2,24E-01 mono 1,36E-01 5,08E-03 2,79 1,99E+00 2,49E-01
04/02/2005 13/20

H-16bbb Fn =0,4 Sref clearance Cw Wave height e-2 trim Rw convergencecata 2,68E-01 0,1 div 0,15 6,39E-03 3,77 5,37E-01 1,38E+00 0,2 5,88E-03 3,33 6,08E-01 1,27E+00 0,25 5,17E-03 2,78 4,90E-01 1,11E+00 0,3 4,70E-03 2,68 3,91E-01 1,01E+00 0,35 4,42E-03 2,54 3,26E-01 9,52E-01 0,4 4,24E-03 2,48 2,86E-01 9,14E-01 0,45 4,13E-03 2,47 2,60E-01 8,89E-01 0,5 4,05E-03 2,46 2,42E-01 8,72E-01 1 3,92E-03 2,47 2,08E-01 8,44E-01 mono 1,34E-01 3,95E-03 2,82 2,12E-01 8,50E-01
Fn = 0,6 Sref clearance Cw Wave height e-2 trim Rw convergencecata 2,68E-01 0,1 div 0,15 5,70E-03 3,01 2,10E+00 2,76E+00 0,2 5,12E-03 3,34 1,72E+00 2,48E+00 0,25 4,95E-03 3,41 1,59E+00 2,40E+00 0,3 4,87E-03 4,29 1,53E+00 2,36E+00 0,35 4,82E-03 4,66 1,49E+00 2,34E+00 0,4 4,78E-03 4,72 1,46E+00 2,32E+00 0,5 4,72E-03 4,17 1,40E+00 2,29E+00 1 4,72E-03 4,65 1,38E+00 2,29E+00 mono 1,34E-01 4,72E-03 2,82 1,45E+00 2,29E+00
clearance 0.35 Sref Fn Cw trim Rw 2,68E-01 4,00E-01 4,42E-03 0,33 9,52E-012,68E-01 0,45 5,96E-03 0,98 1,63E+002,68E-01 5,00E-01 6,03E-03 1,35 2,03E+002,68E-01 5,50E-01 5,48E-03 1,48 2,23E+002,68E-01 6,00E-01 4,82E-03 1,49 2,34E+002,68E-01 6,50E-01 4,25E-03 1,44 2,42E+002,68E-01 7,00E-01 3,77E-03 1,38 2,49E+00
Clearance= 0,3 Fn=0,4
Sref ini trim Lcb Cw Wave height e-2 trim R V (disp) 2,68E-01 0 5,15E-01 4,70E-03 2,68 3,91E-01 1,01E+00 5,86E-032,69E-01 0,5 5,33E-01 4,94E-03 2,71 4,27E-01 1,07E+00 5,97E-032,70E-01 1 5,50E-01 5,32E-03 2,84 4,68E-01 1,15E+00 6,09E-032,71E-01 2 5,81E-01 6,42E-03 3,08E+00 5,65E-01 1,40E+00 6,37E-032,72E-01 3 6,10E-01 7,91E-03 3,37E+00 6,80E-01 1,73E+00 6,69E-03
04/02/2005 14/20

H-16b4 Fn=0,4 Sref clearance Cw Wave height e-2 trim Rw cata 2,72E-01 0,25 5,02E-03 2,66 3,72E-01 1,10E+00 0,3 4,57E-03 2,66 2,78E-01 1,00E+00 0,35 4,29E-03 2,52 2,17E-01 9,41E-01 0,4 4,12E-03 2,33 1,77E-01 9,03E-01 0,45 4,01E-03 2,31 1,52E-01 8,78E-01 0,5 3,93E-03 2,3 1,35E-01 8,61E-01 1 3,82E-03 2,29 1,04E-01 8,38E-01 mono 1,36E-01 3,82E-03 2,54 1,04E-01 8,34E-01
Fn=0,6 Sref clearance Cw Wave height e-2 trim Rw cata 2,72E-01 0,2 4,99E-03 3,31 1,52E+00 2,46E+00 0,25 4,81E-03 3,32 1,37E+00 2,37E+00 0,3 4,72E-03 4,06 1,33E+00 2,33E+00 0,35 4,68E-03 4,35 1,30E+00 2,31E+00 0,4 4,66E-03 4,35 1,28E+00 2,30E+00 0,5 4,62E-03 3,73 1,25E+00 2,28E+00 1 4,40E-03 2,76 1,10E+00 2,17E+00 mono 1,36E-01 4,57E-03 2,77 1,23E+00 2,25E+00
clearance 0,3 Fn= 0,4 Sref ini trim Lcb Cw Wave height e-2 trim Rw V (disp) 2,72E-01 0 5,18E-01 4,57E-03 2,66 2,78E-01 1,00E+00 5,92E-032,72E-01 0,5 5,36E-01 4,84E-03 2,58 3,16E-01 1,06E+00 6,04E-032,73E-01 1 5,53E-01 5,24E-03 2,71 3,58E-01 1,15E+00 6,18E-032,74E-01 2 5,86E-01 6,43E-03 3,00E+00 4,51E-01 1,42E+00 6,48E-032,76E-01 3 6,15E-01 8,01E-03 3,46 5,61E-01 1,78E+00 6,83E-03
clearance 0.35 Sref Fn Cw waves trim Rw 2,72E-01 4,00E-01 5,02E-03 2,66 3,72E-01 1,10E+002,71E-01 0,45 5,82E-03 3,47 0,85 1,61E+002,71E-01 5,00E-01 5,88E-03 4,11 1,20 2,01E+002,71E-01 5,50E-01 5,33E-03 4,39 1,32 2,20E+002,72E-01 6,00E-01 4,68E-03 4,35 1,30E+00 2,31E+002,71E-01 6,50E-01 4,11E-03 4,33 1,24 2,37E+00
clearance 0,3 Fn=0,4 Sref ini trim Lcb Cw Wave height e-2 trim Rw V (disp) 2,72E-01 0 5,18E-01 4,57E-03 2,66 2,78E-01 1,00E+00 5,92E-032,70E-01 0,5 5,36E-01 4,74E-03 2,57E+00 3,10E-01 1,03E+00 5,94E-032,68E-01 1 5,52E-01 4,99E-03 2,61E+00 3,43E-01 1,08E+00 5,95E-032,64E-01 2 5,85E-01 5,68E-03 2,69E+00 4,13E-01 1,20E+00 5,95E-032,58E-01 3 6,17E-01 6,43E-03 2,77E+00 4,89E-01 1,33E+00 5,92E-03
04/02/2005 15/20

clearance 0,3 Fn= 0,4 Sref ini z Lcb Cw Wave height e-2 trim Rw V (disp) z ini mm Atr 2,72E-01 0 5,18E-01 4,57E-03 2,66 2,78E-01 1,00E+00 5,92E-03 0 1682,74E-01 0,0005 5,19E-01 4,65E-03 2,68E+00 2,82E-01 1,02E+00 6,02E-03 7,4245 175,79572,76E-01 0,0011 5,20E-01 4,75E-03 2,70E+00 2,88E-01 1,06E+00 6,14E-03 16,3339 185,15062,83E-01 0,0026 5,22E-01 5,02E-03 2,75E+00 3,02E-01 1,14E+00 6,45E-03 38,6074 208,53782,91E-01 0,0045 5,25E-01 5,38E-03 2,88E+00 3,21E-01 1,26E+00 6,85E-03 66,8205 238,1615
H-16b4l Fn=0,4 Sref clearance Cw Wave height e-2 trim Rw cata 2,81E-01 0,15 0,2 5,76E-03 3,34 5,64E-01 1,30E+00 0,3 4,62E-03 2,58 3,63E-01 1,04E+00 0,4 4,14E-03 2,43 2,58E-01 9,36E-01 0,5 3,94E-03 2,4 2,14E-01 8,91E-01 1 3,80E-03 2,4 1,78E-01 8,59E-01 mono 1,40E-01 3,83E-03 2,66 1,80E-01 8,65E-01
Fn=0,6 Sref clearance Cw Wave height e-2 trim Rw cata 2,81E-01 0,15 0,2 5,02E-03 3,27 1,59E+00 1,13E+00 0,3 4,80E-03 4 1,42E+00 1,08E+00 0,35 4,76E-03 4,39 1,38E+00 1,07E+00 0,4 4,73E-03 4,41 1,36E+00 1,07E+00 0,5 4,69E-03 3,87 1,32E+00 1,06E+00 1 4,67E-03 2,76 1,28E+00 1,05E+00 mono 1,40E-01 4,64E-03 2,76 1,31E+00 1,05E+00
clearance 0,3 Fn = 0,4 Sref ini trim Lcb Cw trim Rw V (disp) 2,81E-01 0 5,45E-01 4,62E-03 3,63E-01 1,04E+00 6,25E-032,82E-01 0,5 5,46E-01 4,96E-03 4,06E-01 1,12E+00 6,39E-032,82E-01 1 5,63E-01 5,44E-03 4,51E-01 1,24E+00 6,55E-032,84E-01 2 5,95E-01 6,79E-03 5,54E-01 1,55E+00 6,89E-032,85E-01 3 6,23E-01 8,51E-03 6,70E-01 1,95E+00 7,27E-03
04/02/2005 16/20

H-30bb Fn = 0,4 Sref clearance Cw Wave height e-2 en mm trim Rw cata 2,79E-01 0,25 0,00E+00 0,3 6,34E-03 4 593,96 6,38E-01 1,42E-01 0,35 6,08E-03 3,81 565,7469 5,88E-01 1,36E-01 0,4 5,92E-03 3,72 552,3828 5,56E-01 1,32E-01 0,45 5,81E-03 3,67 544,9583 5,35E-01 1,30E-01 0,5 5,74E-03 3,73 553,8677 5,21E-01 1,28E-01 1 5,58E-03 3,79 562,7771 4,85E-01 1,25E-01 mono 1,40E-01 5,53E-03 4,16 617,7184 4,71E-01 1,24E-01
Sref clearance Cw Wave height e-2 en mm trim Rw
2,79E-01 0,2 5,96E-03 3,76 2,09E+00 2,99E-01 0,3 5,70E-03 3,96 1,93E+00 2,86E-01 0,35 5,67E-03 4,52 1,90E+00 2,85E-01 Fn=0,6 0,4 5,65E-03 4,66 1,88E+00 2,84E-01 0,5 5,61E-03 4,1 1,83E+00 2,82E-01 1 5,58E-03 3,13 1,78E+00 2,80E-01 clearance 0,3 Fn= 0,4 Sref zori displacement Lcb Cw trim Rw
2,79E-01 0 6,55E-03 6,34E-03 6,38E-01 1,43E+00 2,77E-01 -0,0005 6,45E-03 5,46E-01 5,79E-03 7,58E-01 1,29E+00 2,75E-01 -0,0011 6,33E-03 5,46E-01 6,22E-03 6,21E-01 1,38E+00 2,84E-01 0,0005 6,77E-03 5,47E-01 7,12E-03 4,49E-01 1,63E+00 2,68E-01 -0,0026 6,04E-03 5,45E-01 5,70E-03 6,15E-01 1,23E+00
H-30b3 Fn = 0,4 clearance Cw Wave height e-2 Trim Rw 0,00E+00Sref 0,3 6,58E-03 4,62 8,43E-01 1,45E-012,75E-01 0,35 6,32E-03 4,16 7,92E-01 1,39E-01 0,4 6,15E-03 4,03 7,59E-01 1,35E-01 0,45 6,05E-03 4,03 7,36E-01 1,33E-01 0,5 5,97E-03 4,17 7,19E-01 1,31E-01 1 5,80E-03 4,2 6,78E-01 1,27E-01
04/02/2005 17/20

H-30b4 Fn= 0,4 clearance Cw Wave height e-2 trim Rw convergence 0,25 div Sref 0,3 5,87E-03 3,46 6,17E-01 2,64E-01 0,35 5,59E-03 4,2 5,48E-01 1,19E+00 0,4 5,43E-03 3,98 5,13E-01 1,15E+00 0,45 5,32E-03 3,84 4,92E-01 1,13E+00 0,5 5,25E-03 3,75 4,77E-01 1,11E+00 1 5,11E-03 3,77 4,40E-01 1,08E+00 Fn=0,6 clearance Cw Wave height e-2 trim Rw convergence
0,25 div tran : 3 0,3 5,40E-03 4,35 1,88E+00 2,58E+00 div 0,35 5,39E-03 4,75 1,86E+00 2,57E+00 0,4 5,37E-03 4,7 1,83E+00 2,56E+00 0,5 5,34E-03 4 1,79E+00 2,55E+00 1 5,32E-03 2,81 1,74E+00 2,54E+00
clearance 0,35 Fn= 0,4 Sref ini trim Lcb Cw Wave height e-2 trim Rw V (disp) 2,64E-01 0 5,19E-01 5,59E-03 4,2 5,48E-01 1,19E+00 5,86E-032,64E-01 0,5 5,35E-01 6,02E-03 3,49 6,05E-01 1,28E+00 5,94E-032,64E-01 1 5,50E-01 6,55E-03 3,74E+00 6,51E-01 1,39E+00 6,03E-032,65E-01 2 5,78E-01 7,90E-03 4,23E+00 7,51E-01 1,68E+00 6,24E-03
clearance 0.35 Sref Fn Cw waves trim Rw 2,64E-01 4,00E-01 5,59E-03 4,2 5,48E-01 1,19E+002,64E-01 0,45 7,09E-03 3,63 1,28 1,90E+002,64E-01 5,00E-01 6,95E-03 4,41 1,68 2,30E+002,64E-01 5,50E-01 6,21E-03 4,73 1,83 2,49E+002,64E-01 6,00E-01 5,39E-03 4,75 1,86E+00 2,57E+002,64E-01 7,00E-01 4,17E-03 5,06 1,80 2,71E+00
04/02/2005 18/20

Comparison of hulls
Fn=0,4 Atr/Am Cw Wave height e-2 trim Rw output file Rt Rf
Rw cf formula
outside water H0 0 0,005261 2,79 1,059869 1,203093 1,715521 0,512428 0,115267 H16 0 0,005269 2,53 1,102033 0 0,111207 H16b 0 5,30E-03 2,62 1,15E+00 1,189427 1,690647 0,50122 0,113612wet transom 0 comp8H-16 H-16 b 0,130408 0,004876 3,08 0,834327 1,141768 1,664828 0,523061 0,109668results H-16 H-16 0,115922 0,00581 3,49 0,973762 0 0,131668 H-16bb 0,120249 0,004823 3,04 0,611019 1,092956 1,59653 0,503574 0,105135
H-16bbb 0,11571 0,00442 2,54 0,326434 0,987996 1,480262 0,492266 0,094725
H-16b4 0,149907 0,004292 2,52 0,21663 0,972287 1,470952 0,498664 0,093564 H-16b4l 1,01719 1,536732 0,519542 H-30 0,32845 0 H-30bb 0,303534 0,006084 3,81 0,588215 1,389993 1,906604 0,516611 0,135927 H-30b3 0,195505 0,006319 4,16 0,791938 0 0,138775 H-30b4 0,180266 5,59E-03 4,2 5,48E-01 1,213971 1,697288 0,483317 0,117922 0 53 5,45E-03 3,55 0,968633 1,105579 1,583086 0,477507 0,112738
04/02/2005 19/20

Seakeeping The hull used for this calculation was H-16b4.
Coodinate of B x y z B 7361.06 0 -278.939
Stability c zM Phy0 (degree) GZ fo Phy0- GZ fo Phy0+
0,08 18,4 0,508562164 0,210253650,2 9,60082116 7,3 1,212306531 0,588542290,3 21,5907394 4,8 1,817524699 0,89702170,4 38,3766249 3,6 2,422929886 1,202659460,5 59,9584778 2,9 3,028409882 1,50716055
Roll period Coefficient used for weight repartition: 3.00
c GMt coeff centre term axe Ir roll period roll frequency
0,08 1,70122446 20,4146935 22,11591792 0,2 9,60082116 10,6326528 127,591834 138,224487 23,8406544 0,26354920,3 21,5907394 23,9234689 287,081627 311,0050958 23,8467865 0,263481430,4 38,3766249 42,5306114 510,367337 552,8979481 23,8489338 0,26345770,5 59,9584778 66,4540803 797,448964 863,9030439 23,8499279 0,26344672
04/02/2005 20/20