Dependability Benchmarking: Where Are We Standing? · Dependability Benchmarking: Where Are We...
18
Dependability Benchmarking: Where Are We Standing? Jean Arlat [[email protected]] Benchmarking Expert Meeting — Stuttgart, Germany — September 19-20, 2007
Transcript of Dependability Benchmarking: Where Are We Standing? · Dependability Benchmarking: Where Are We...
Dependability Benchmarking:Where Are We Standing?
Jean Arlat[[email protected]]
Benchmarking Expert Meeting — Stuttgart, Germany — September 19-20, 2007
2
197 Researchers and Faculty• 80 CNRS, 101 Faculty,
16 Visiting researchers
33 Post-docs
248 PhD students
110 Engineers, Techniciansand Administrative staff
• 70 eng & tech., 40 admin.
Four Research Clusters
• MINAS: Micro and Nano Systems
• MOCOSY: Modelling, Optimization &System Control
• RIA: Robotics and Artificial Intelligence
• SINC: Critical Information Systems
• Research unit of CNRS (French National Organization for Scientific Research)
• Associated with 3 academic institutions: UPS, INPT, INSA
Brest
Besançon
Limoges
Orléans
Rouen
Caen
Troyes
Tours
Clermont-Ferrand
Dijon
Bordeaux
Belfort
Poitiers
VannesLe Mans
Amiens
Paris
Grenoble
Toulouse
RennesBrest
Lille
Nancy
Lyon
Saint-Etienne
Lannion
Montpellier
Nantes
Marseille
Angers
Strasbourg
Nice
3
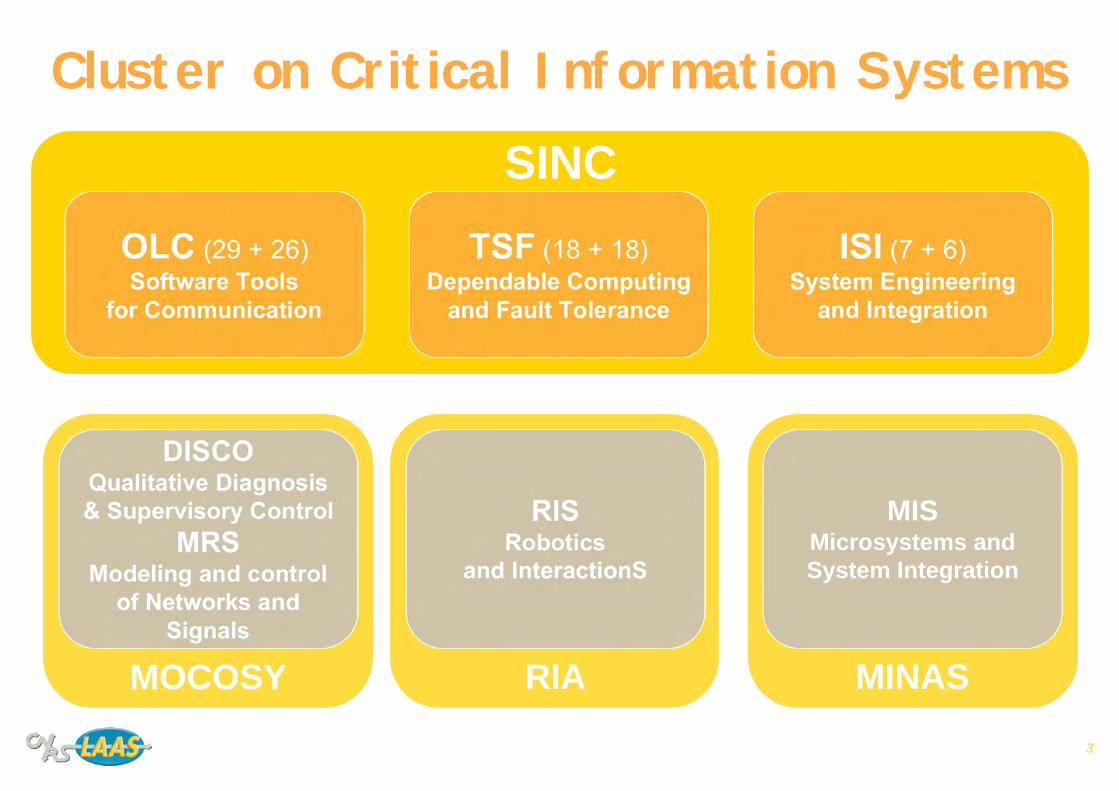
Cluster on Critical Information Systems
TSF (18 + 18)
Dependable Computingand Fault Tolerance
OLC (29 + 26)
Software Toolsfor Communication
ISI (7 + 6)
System Engineeringand Integration
SINC
DISCOQualitative Diagnosis& Supervisory Control
MRSModeling and control
of Networks andSignals
MOCOSY
RISRobotics
and InteractionS
RIA
MISMicrosystems andSystem Integration
MINAS
4
DEPENDABLE COMPUTING AND FAULTTOLERANCE
5
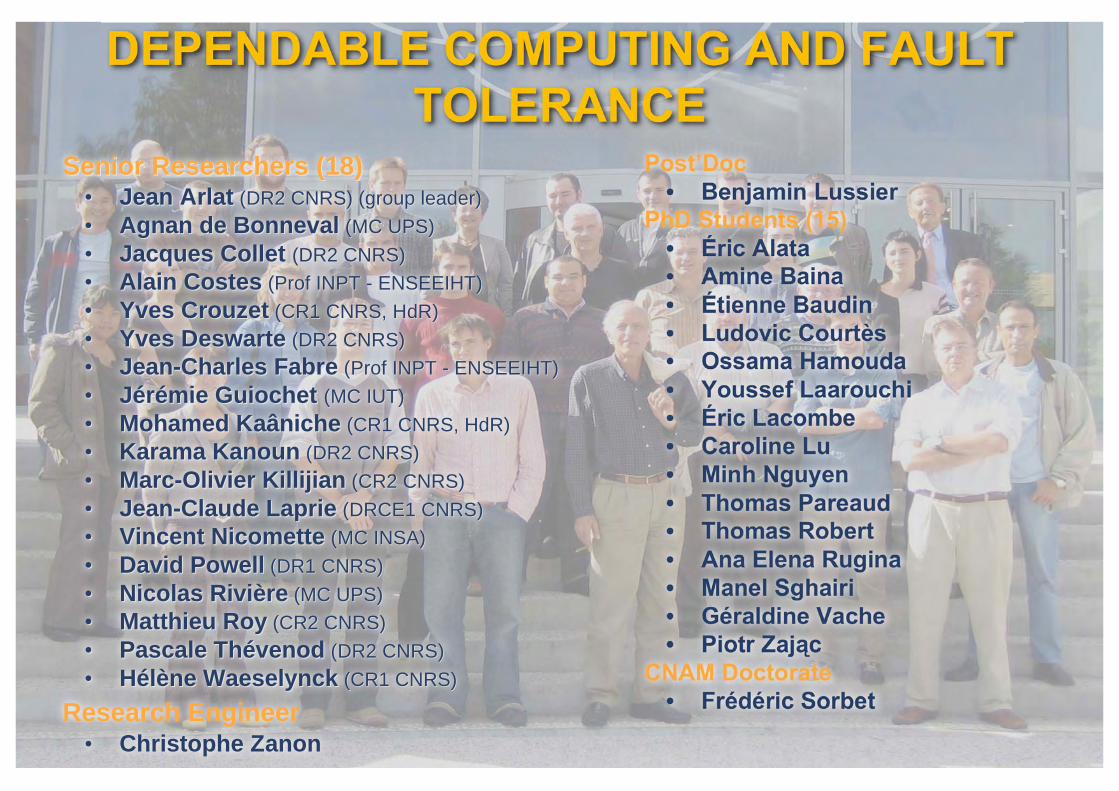
DEPENDABLE COMPUTING AND FAULTTOLERANCE
Post’Doc• Benjamin Lussier
PhD Students (15)• Éric Alata• Amine Baina• Étienne Baudin• Ludovic Courtès• Ossama Hamouda• Youssef Laarouchi• Éric Lacombe• Caroline Lu• Minh Nguyen• Thomas Pareaud• Thomas Robert• Ana Elena Rugina• Manel Sghairi• Géraldine Vache• Piotr Zaj c
CNAM Doctorate• Frédéric Sorbet
Senior Senior Researchers Researchers (18)(18)•• Jean Jean ArlatArlat (DR2 CNRS) (group leader)(DR2 CNRS) (group leader)
•• Agnan de BonnevalAgnan de Bonneval (MC UPS)(MC UPS)
•• Jacques Collet Jacques Collet (DR2 CNRS)(DR2 CNRS)
•• Alain CostesAlain Costes (Prof INPT - ENSEEIHT)(Prof INPT - ENSEEIHT)
•• Yves Yves CrouzetCrouzet (CR1 CNRS, (CR1 CNRS, HdRHdR))
•• Yves Yves DeswarteDeswarte (DR2 CNRS)(DR2 CNRS)
•• Jean-Charles FabreJean-Charles Fabre (Prof INPT - ENSEEIHT)(Prof INPT - ENSEEIHT)
•• Jérémie Jérémie Guiochet Guiochet (MC IUT)(MC IUT)
•• Mohamed Mohamed KaânicheKaâniche (CR1 CNRS, (CR1 CNRS, HdRHdR))
•• Karama KanounKarama Kanoun (DR2 CNRS)(DR2 CNRS)
•• Marc-Olivier KillijianMarc-Olivier Killijian (CR2 CNRS)(CR2 CNRS)
•• Jean-Claude Jean-Claude LaprieLaprie (DRCE1 CNRS)(DRCE1 CNRS)
•• Vincent Vincent NicometteNicomette (MC INSA)(MC INSA)
•• David PowellDavid Powell (DR1 CNRS)(DR1 CNRS)
•• Nicolas RivièreNicolas Rivière (MC UPS)(MC UPS)
•• Matthieu RoyMatthieu Roy (CR2 CNRS)(CR2 CNRS)
•• Pascale Pascale ThévenodThévenod (DR2 CNRS)(DR2 CNRS)
•• Hélène Hélène WaeselynckWaeselynck (CR1 CNRS)(CR1 CNRS)
Research Engineer• Christophe Zanon
6
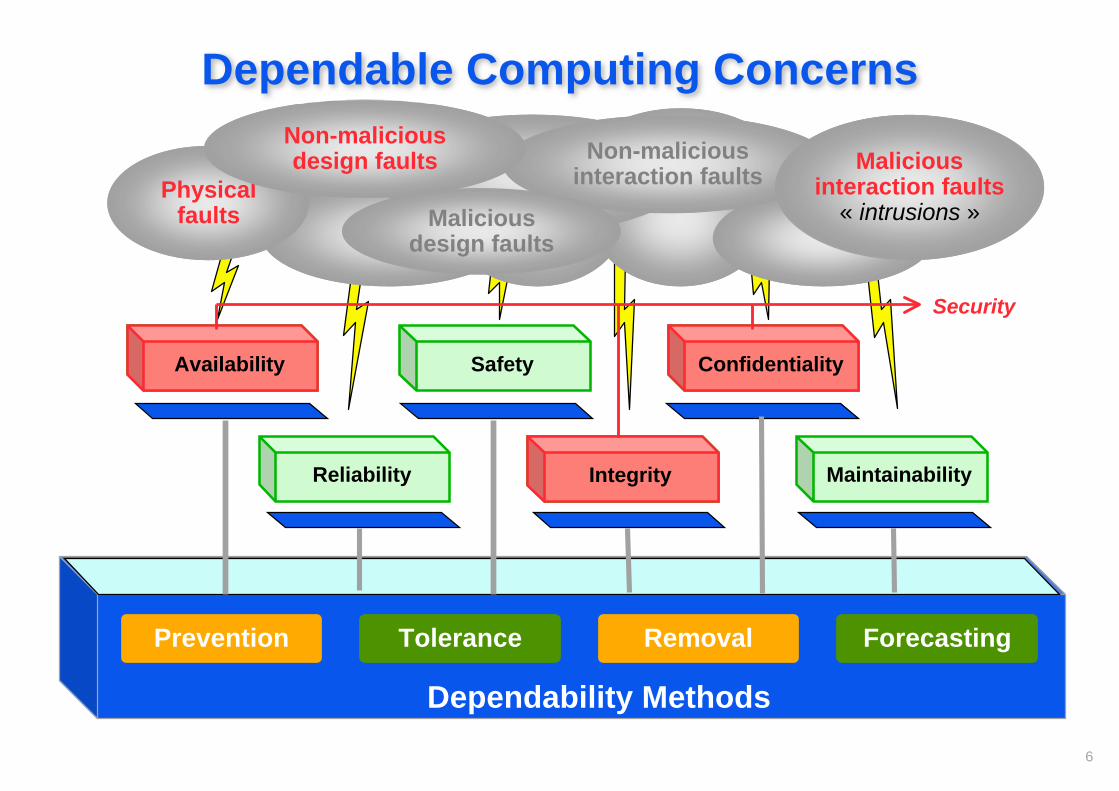
Fautes d’interaction sans malveillance
Fautesphysiques
Fautes de conceptionsans malveillance
Fautes de conception avec malveillance
Fautes d’interactionavec malveillance
« intrusions »
Non-maliciousinteraction faults
Physicalfaults
Non-maliciousdesign faults
Maliciousdesign faults
Maliciousinteraction faults
« intrusions »
Availability Safety Confidentiality
Reliability Integrity Maintainability
Dependable Computing Concerns
Prevention Tolerance Removal Forecasting
Dependability Methods
Availability Confidentiality
Integrity
Security
7
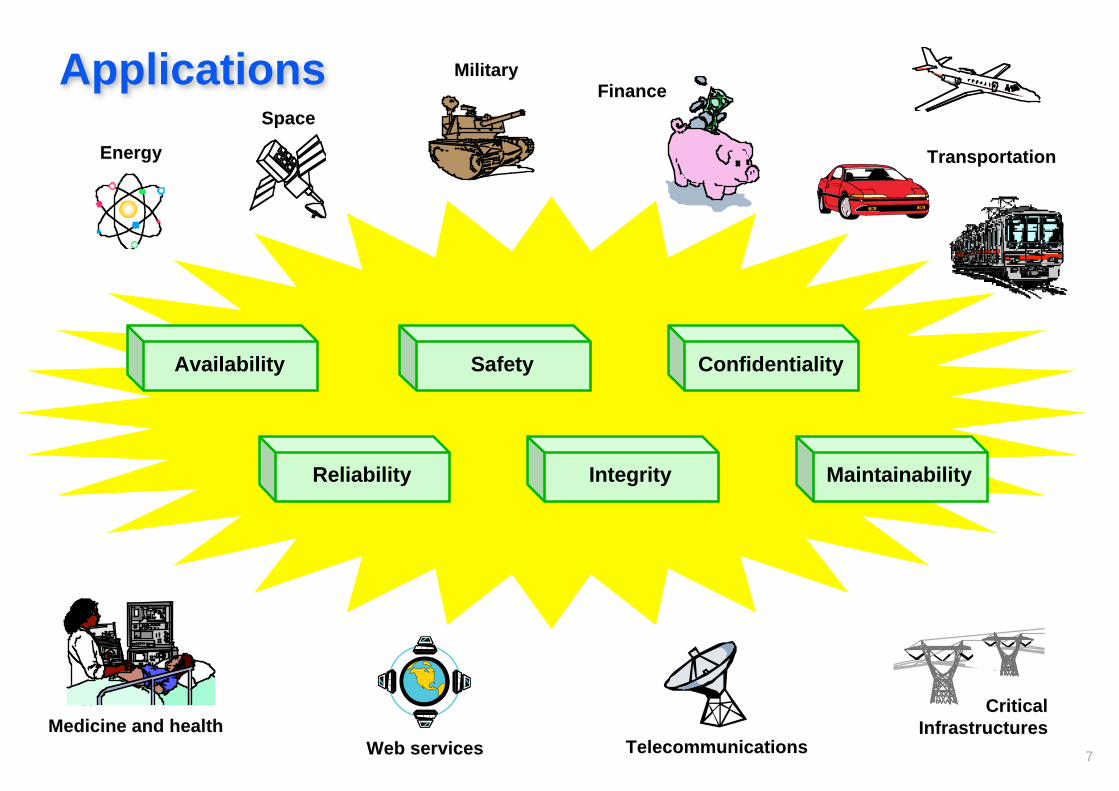
EnergyEnergy
Medicine and healthMedicine and health
SpaceSpace
MilitaryMilitary
TransportationTransportation
FinanceFinance
Availability Safety Confidentiality
Reliability Integrity Maintainability
Applications
CriticalCriticalInfrastructuresInfrastructures
Web servicesWeb services TelecommunicationsTelecommunications
8
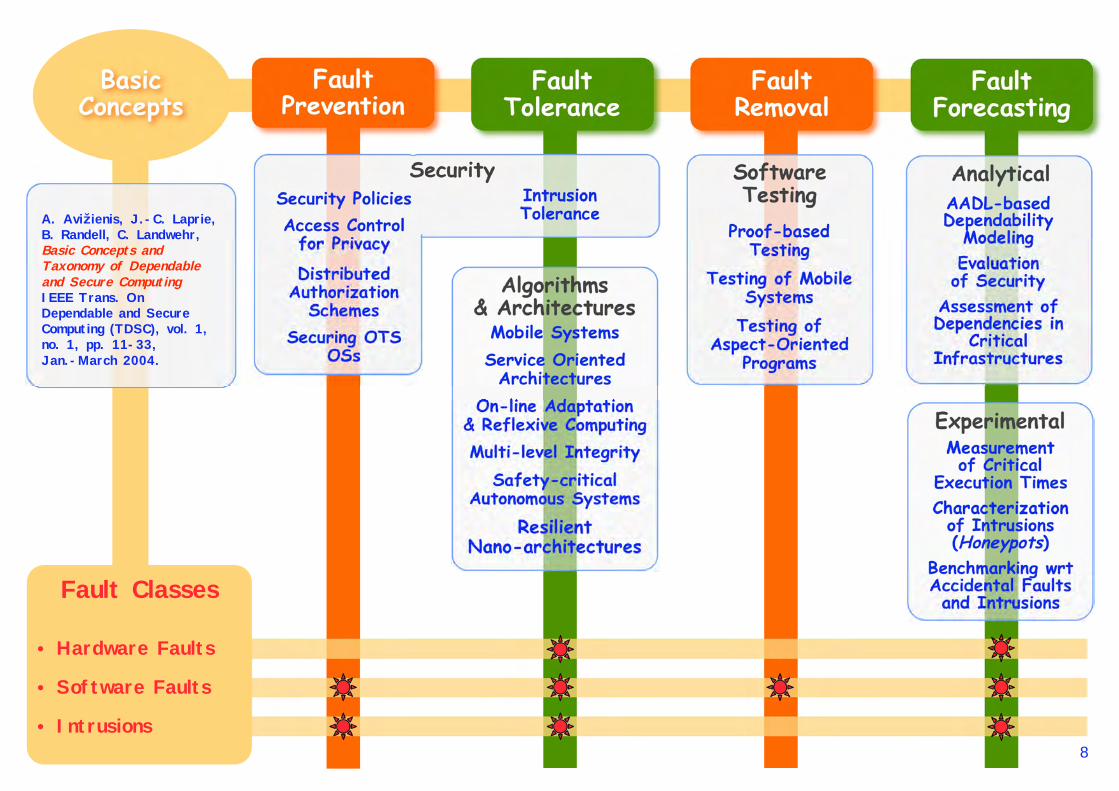
BasicConcepts
Fault Classes
• Hardware Faults
• Software Faults
• Intrusions
FaultRemoval
FaultPrevention
FaultForecasting
FaultTolerance
SoftwareTesting
Proof-basedTesting
Testing of MobileSystems
Testing ofAspect-Oriented
Programs
AnalyticalAADL-basedDependability
Modeling
Evaluationof Security
Assessment ofDependencies in
CriticalInfrastructures
Algorithms& Architectures
Mobile Systems
Service OrientedArchitectures
On-line Adaptation& Reflexive Computing
Multi-level Integrity
Safety-criticalAutonomous Systems
ResilientNano-architectures
ExperimentalMeasurementof Critical
Execution Times
Characterizationof Intrusions(Honeypots)
Benchmarking wrtAccidental Faultsand Intrusions
SecurityIntrusionTolerance
Security Policies
Access Controlfor Privacy
DistributedAuthorization
Schemes
Securing OTSOSs
A. Avi ienis, J.-C. Laprie,B. Randell, C. Landwehr,Basic Concepts andTaxonomy of Dependableand Secure ComputingIEEE Trans. OnDependable and SecureComputing (TDSC), vol. 1,no. 1, pp. 11-33,Jan.-March 2004.
9
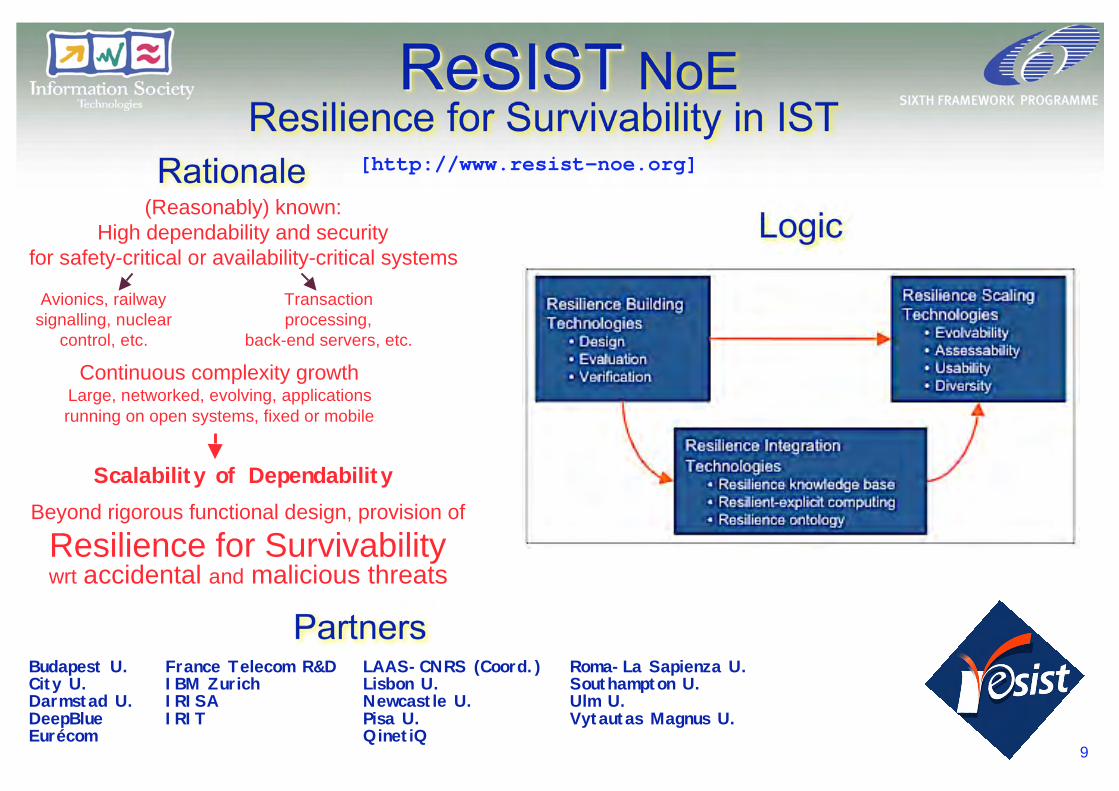
ReSISTReSIST NoEResilience for Survivability in IST
Continuous complexity growthLarge, networked, evolving, applications
running on open systems, fixed or mobile
Scalability of Dependability
Beyond rigorous functional design, provision of
Resilience for Survivabilitywrt accidental and malicious threats
Avionics, railway
signalling, nuclear
control, etc.
Transaction
processing,
back-end servers, etc.
(Reasonably) known:
High dependability and security
for safety-critical or availability-critical systems
Partners
Rationale
Logic
QinetiQEurécomVytautas Magnus U.Pisa U.IRITDeepBlueUlm U.Newcastle U.IRISADarmstad U.Southampton U.Lisbon U.IBM ZurichCity U.Roma-La Sapienza U.LAAS-CNRS (Coord.)France Telecom R&DBudapest U.
[http://www.resist-noe.org]
10
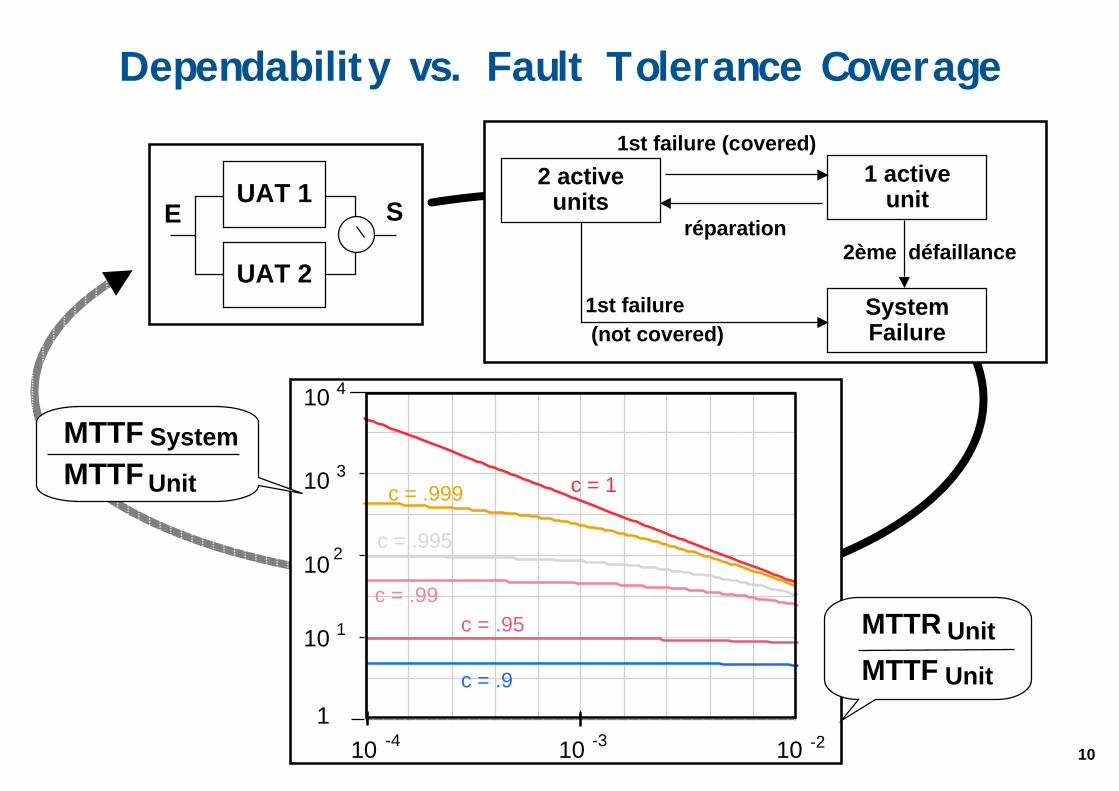
Dependability vs. Fault Tolerance Coverage
2 activeunits
SystemFailure
1 activeunit
1st failure (not covered)
1st failure (covered)
réparation2ème défaillance
UAT 1
UAT 2
E S
2
10 -4 10 -3 10 -2
c = .95
c = .9
c = .99
c = .995
c = .999 c = 1
10 1
10
10
10 4
1
3
MTTF System
MTTF Unit
MTTR
MTTFUnit
Unit
11
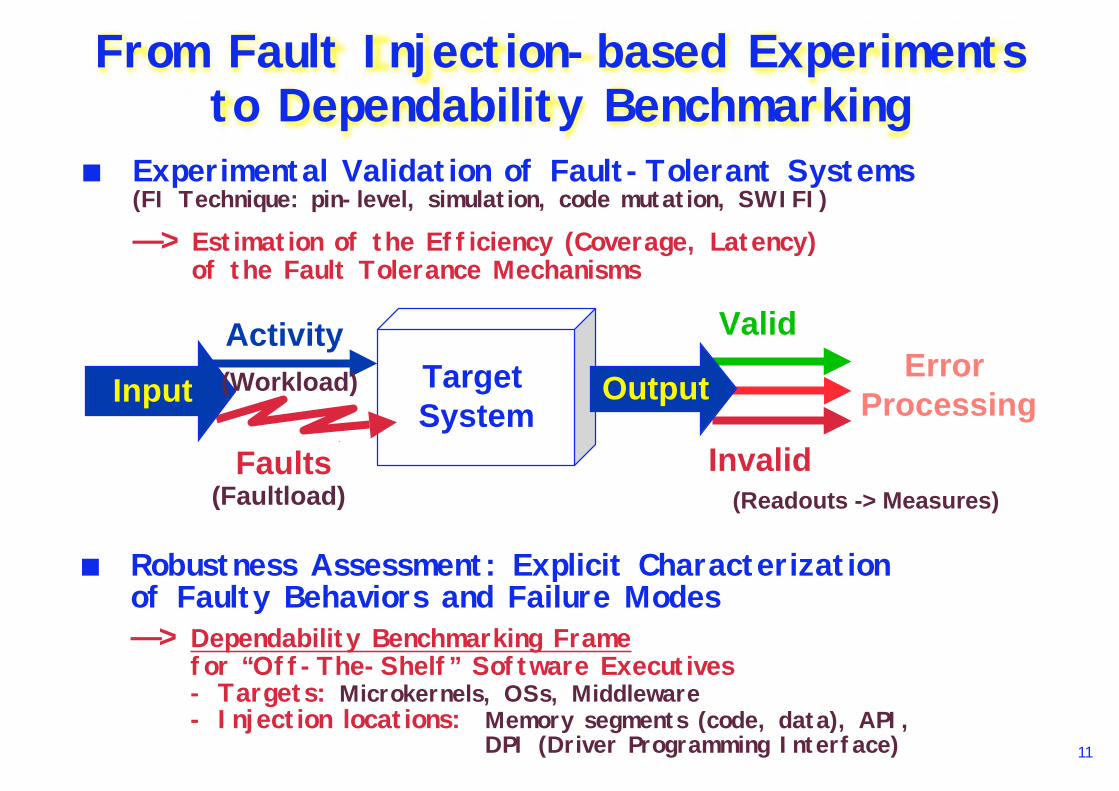
Input
From Fault Injection-based Experimentsto Dependability Benchmarking
Robustness Assessment: Explicit Characterizationof Faulty Behaviors and Failure Modes—> Dependability Benchmarking Frame
for “Off-The-Shelf” Software Executives- Targets: Microkernels, OSs, Middleware- Injection locations: Memory segments (code, data), API,
DPI (Driver Programming Interface)
Target System
Activity
Faults
InputError
Processing
Valid
Invalid
Output(Workload)
(Faultload) (Readouts -> Measures)
Experimental Validation of Fault-Tolerant Systems(FI Technique: pin-level, simulation, code mutation, SWIFI)
—> Estimation of the Efficiency (Coverage, Latency) of the Fault Tolerance Mechanisms
12
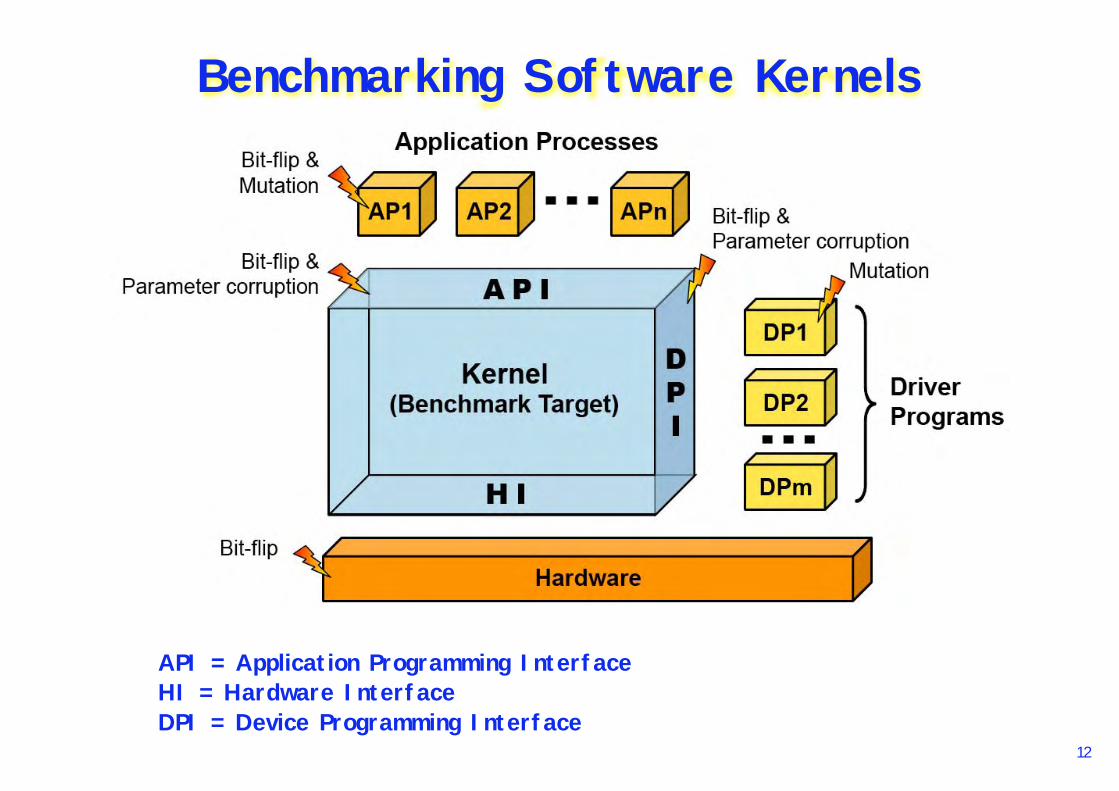
Benchmarking Software Kernels
API = Application Programming InterfaceHI = Hardware InterfaceDPI = Device Programming Interface
13
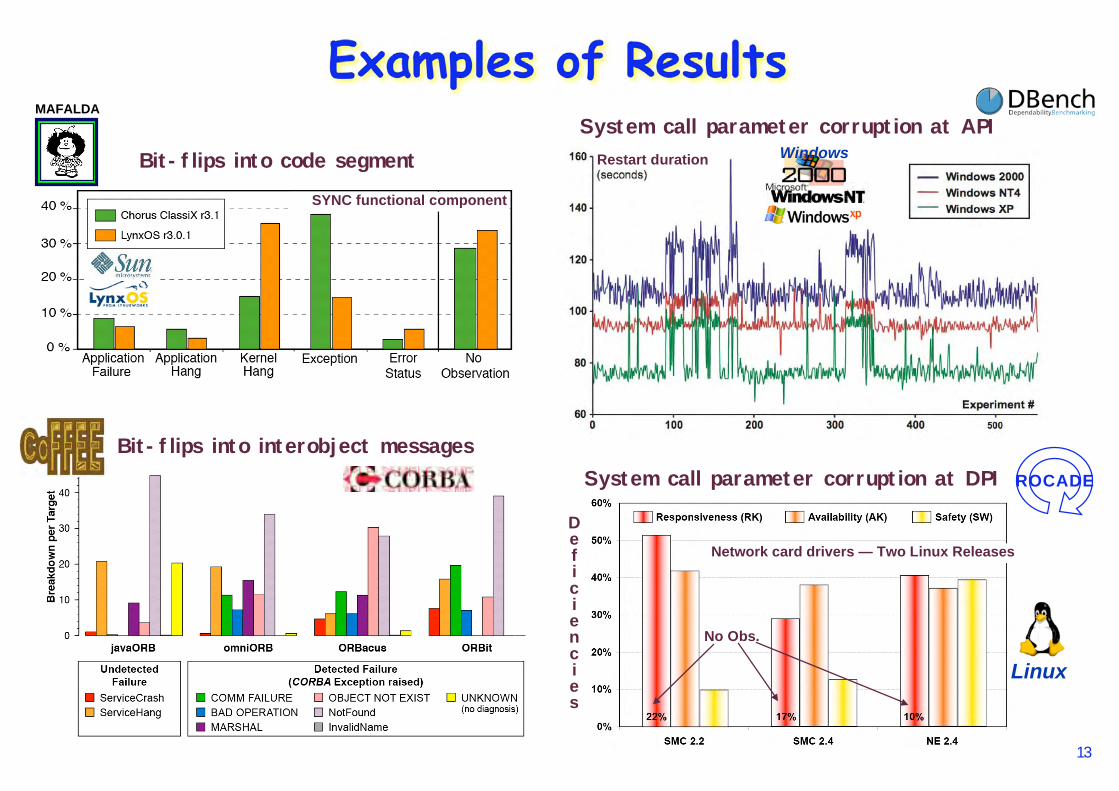
Examples of Results
Bit-flips into code segment
SYNC functional component
Bit-flips into interobject messages
System call parameter corruption at API
Restart duration
MAFALDA
System call parameter corruption at DPI
Network card drivers — Two Linux Releases
No Obs.
Deficiencies
ROCADE
Linux
Windows
14
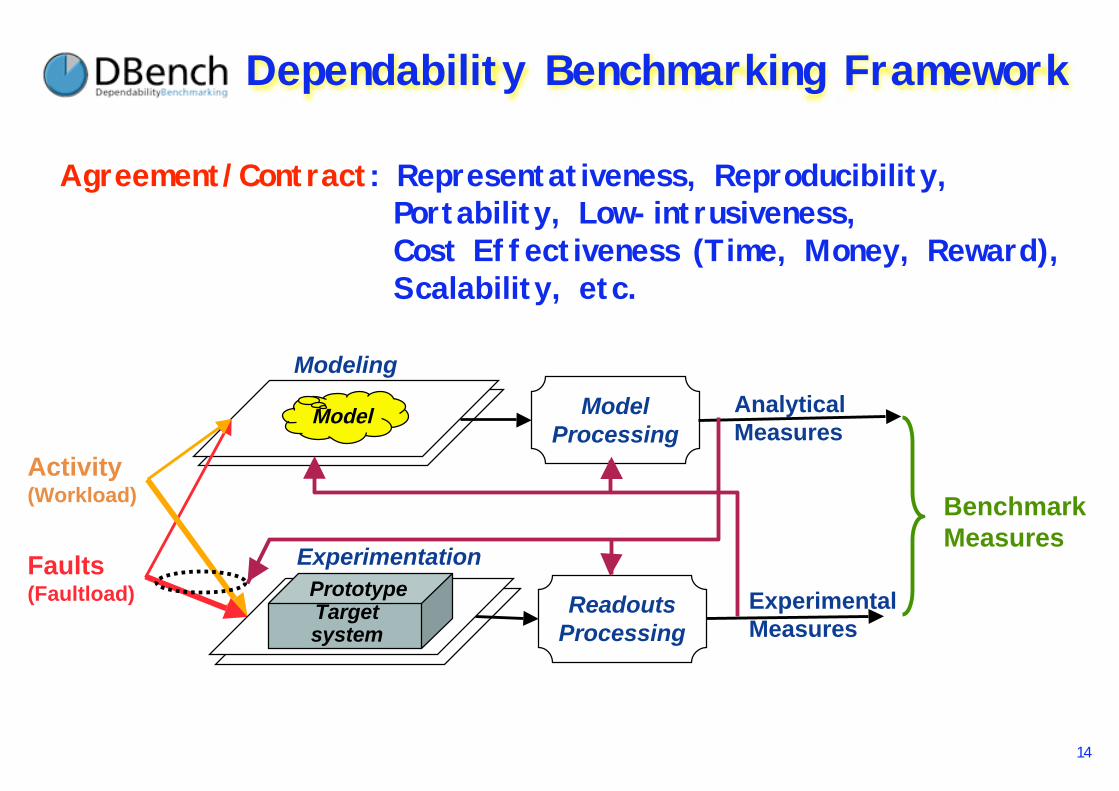
Activity(Workload)
Faults(Faultload)
Analytical Measures
ExperimentalMeasures
BenchmarkMeasures
Model
Processing
Readouts
Processing
Model
PrototypeTargetsystem
Modeling
Experimentation
Dependability Benchmarking Framework
Agreement/Contract: Representativeness, Reproducibility, Portability, Low-intrusiveness,Cost Effectiveness (Time, Money, Reward),Scalability, etc.
15
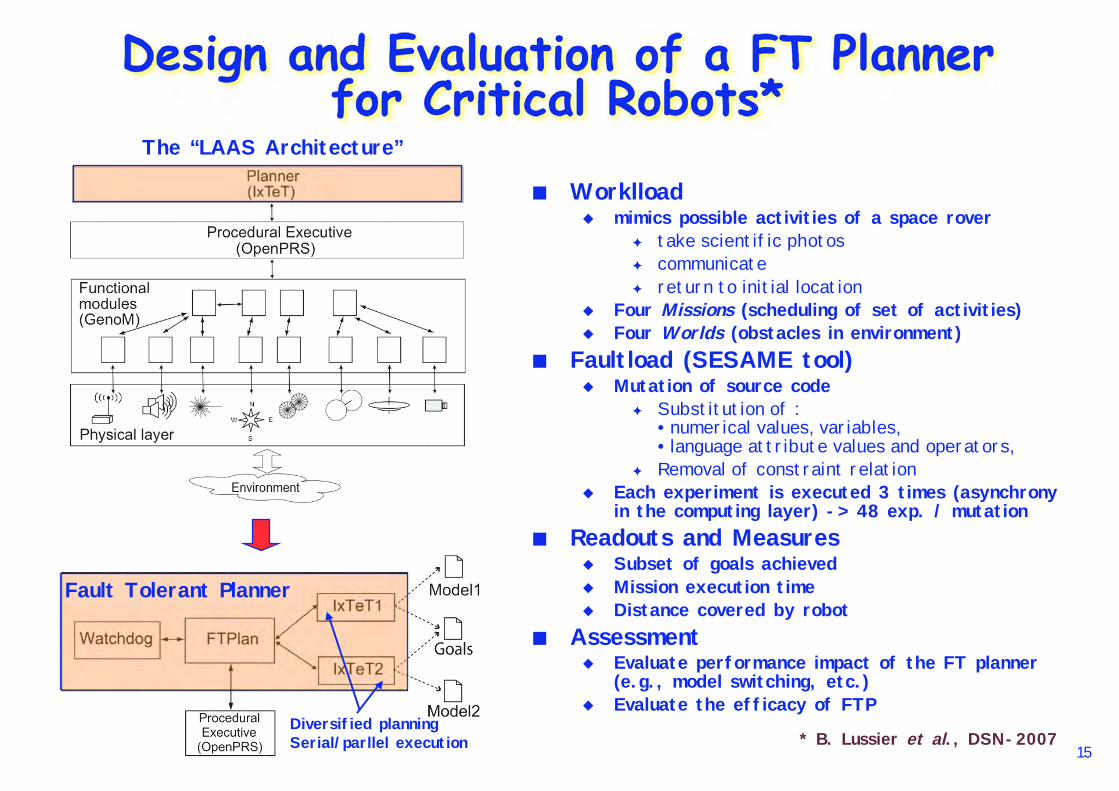
Design and Evaluation of a FT Plannerfor Critical Robots*
Worklloadmimics possible activities of a space rover
take scientific photoscommunicatereturn to initial location
Four Missions (scheduling of set of activities)Four Worlds (obstacles in environment)
Faultload (SESAME tool)Mutation of source code
Substitution of :• numerical values, variables,• language attribute values and operators,Removal of constraint relation
Each experiment is executed 3 times (asynchronyin the computing layer) -> 48 exp. / mutation
Readouts and MeasuresSubset of goals achievedMission execution timeDistance covered by robot
AssessmentEvaluate performance impact of the FT planner(e.g., model switching, etc.)Evaluate the efficacy of FTP
The “LAAS Architecture”
Fault Tolerant Planner
Diversified planningSerial/parllel execution * B. Lussier et al., DSN-2007
16
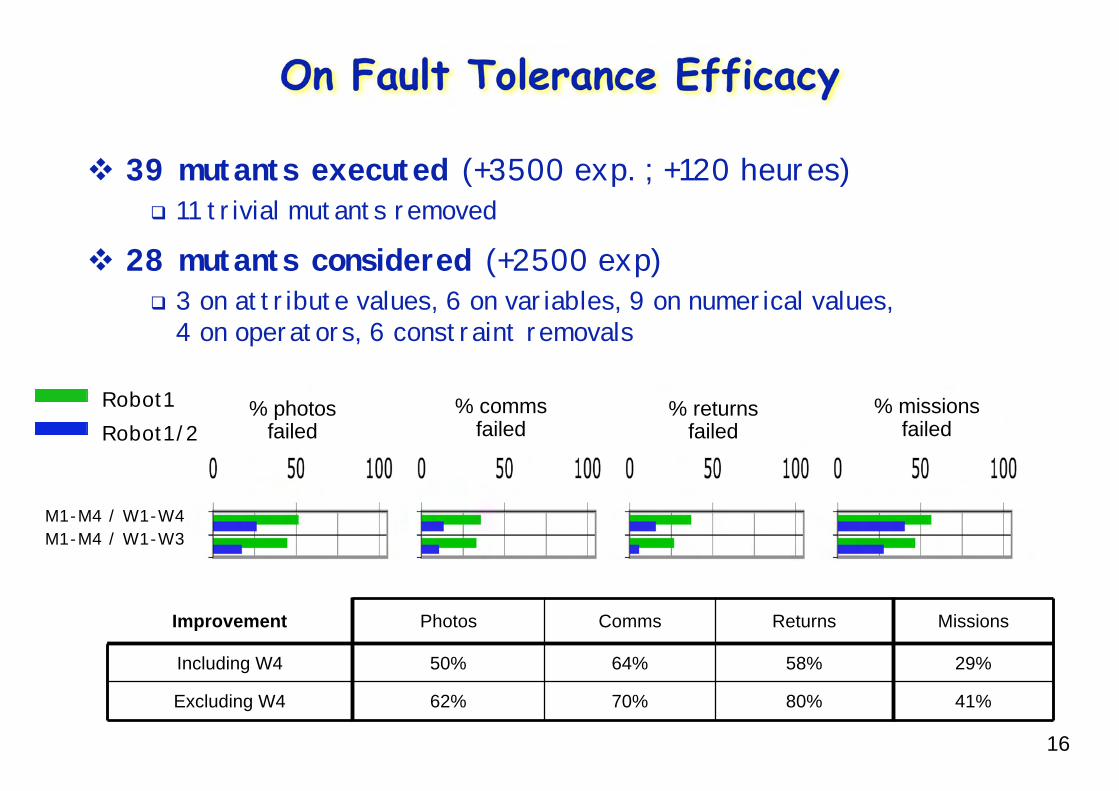
On Fault Tolerance Efficacy
M1-M4 / W1-W3
M1-M4 / W1-W4
Robot1/2
Robot1
41%80%70%62%Excluding W4
29%58%64%50%Including W4
MissionsReturnsCommsPhotosImprovement
39 mutants executed (+3500 exp. ; +120 heures)11 trivial mutants removed
28 mutants considered (+2500 exp)3 on attribute values, 6 on variables, 9 on numerical values,4 on operators, 6 constraint removals
% photosfailed
% commsfailed
% returnsfailed
% missionsfailed
17
Additional References and Useful LinksP. Koopman, J. DeVale,“Comparing the Robustness of POSIX Operating Systems”, 29th IEEE Int. Symp. onFault-Tolerant Computing (FTCS-29), (Madison, WI, USA), pp.30-37, IEEE CS Press, 1999.
J. Arlat, J.-C. Fabre, M. Rodríguez, F. Salles, “Dependability of COTS Microkernel-Based Systems”, IEEETrans. on Computers, 51 (2), pp.138-163, February 2002.
E. Marsden, J.-C. Fabre, J. Arlat, “Dependability of CORBA Systems: Service Characterization by FaultInjection”, 21st IEEE Int. Symp. on Reliable Distributed Systems (SRDS-2002), (Osaka, Japan), pp.276-285,IEEE CS Press, 2002.
K. Kanoun, H. Madeira, M. Dal Cin, F. Moreira, J. C. Ruiz Garcia, “DBench (Dependability Benchmarking)”, 5thEuropean Dependable Computing Conference (EDCC-5) - Project Track, (Budapest, Hungary), 2005, Also LAASReport 05-197 -- http://www.laas.fr/Dbench.
K. Kanoun, Y. Crouzet, “Dependability Benchmarks for Operating Systems”, Int. Journal of PerformabilityEngineering, 2 (3), pp. 275-287, July 2006.
Y. Crouzet, H. Waeselynck, B. Lussier, D. Powell, “The SESAME Experience: From Assembly Languages toDeclarative Models”, 2nd Workshop on Mutation Analysis (Mutation2006), (Raleigh, NC, USA), 2006. --http://www.irisa.fr/manifestations/2006/Mutation2006/
A. Albinet, J. Arlat, J.-C. Fabre, “Robustness of the Device Driver-Kernel Interface: Application to the LinuxKernel”, in Dependability Benchmarking (K. Kanoun, L. Spainhower, Eds.), IEEE CS Press, 2007 (to appear). AlsoLAAS Report 06-351.
B. Lussier, M. Gallien, J. Guiochet, F. Ingrand, M.-O. Killijian, D. Powell, “Experiments with Diversified Modelsfor Fault-Tolerant Planning”, 5th IARP/IEEE-RAS/EURON Workshop on Technical Challenges for DependableRobots in Human Environments (IARP/DRHE’07), 2007.
B. Lussier, M. Gallien, J. Guiochet, F. Ingrand, M.-O. Killijian, D. Powell, "Fault Tolerant Planning for CriticalRobots," 37th Annual IEEE/IFIP Int. Conf. on Dependable Systems and Networks (DSN'07), pp. 144-153, 2007.
B. Lussier, M. Gallien, J. Guiochet, F. Ingrand, M.-O. Killijian, D. Powell, “Planning with Diversified Models forFault-Tolerant Robots”, 17th Int. Conf. On Automated Planning and Scheduling, 2007
IFIP WG 10.4 SIG on Dependability Benchmarking --http://www.laas.fr/~kanoun/ifip_wg_10_4_sigdeb/index.html
18
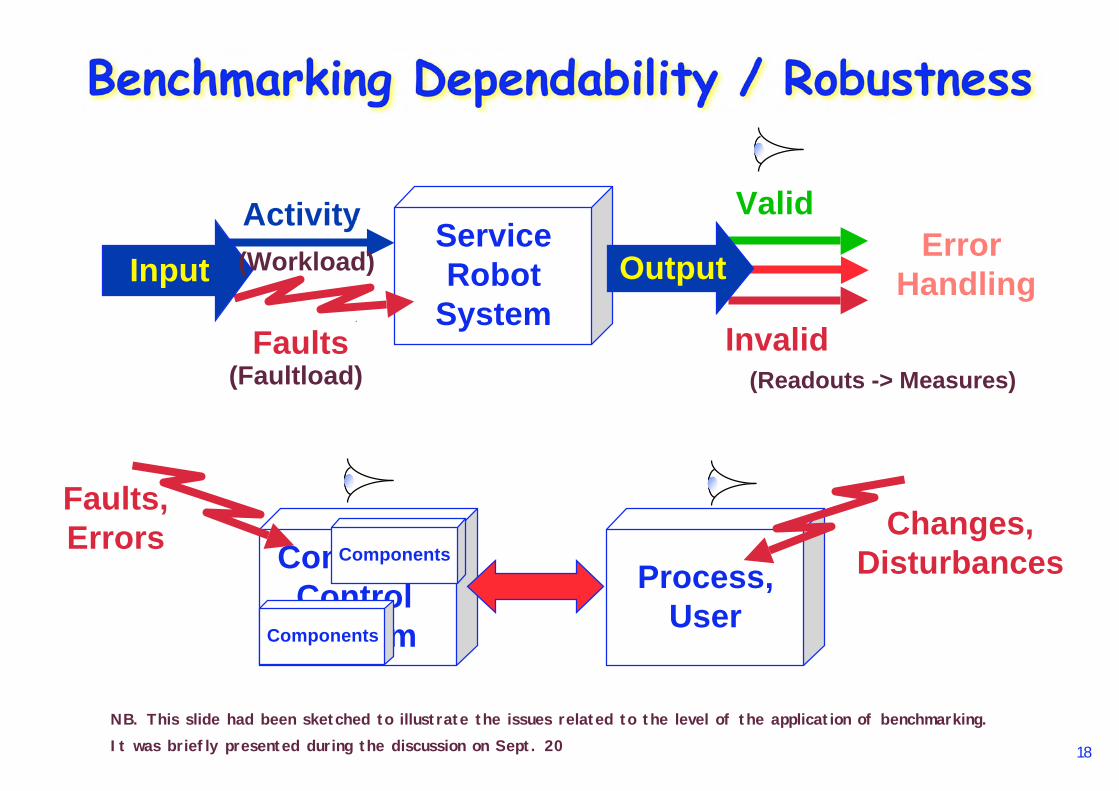
Benchmarking Dependability / Robustness
InputServiceRobot
System
Activity
Faults
InputError
Handling
Valid
Invalid
Output(Workload)
(Faultload) (Readouts -> Measures)
Computer,Control System
Process,User
Faults,Errors Changes,
Disturbances
Components
Components
NB. This slide had been sketched to illustrate the issues related to the level of the application of benchmarking.
It was briefly presented during the discussion on Sept. 20