
DEMONSTRATION OF A STABILIZED HOVERING PLATFORM …etd.lib.metu.edu.tr/upload/12605772/index.pdf ·...
101
DEMONSTRATION OF A STABILIZED HOVERING PLATFORM FOR UNDERGRADUATE LABORATORY A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES OF MIDDLE EAST TECHNICAL UNIVERSITY BY FAHR BURA ÇAMLICA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF SCIENCE IN MECHANICAL ENGINEERING DECEMBER 2004
Transcript of DEMONSTRATION OF A STABILIZED HOVERING PLATFORM …etd.lib.metu.edu.tr/upload/12605772/index.pdf ·...
DEMONSTRATION OF A STABILIZED HOVERING PLATFORM FOR UNDERGRADUATE LABORATORY
A THESIS SUBMITTED TO THE GRADUATE SCHOOL OF NATURAL AND APPLIED SCIENCES
OF MIDDLE EAST TECHNICAL UNIVERSITY
BY
FAHR� BU�RA ÇAMLICA
IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR
THE DEGREE OF MASTER OF SCIENCE IN
MECHANICAL ENGINEERING
DECEMBER 2004
Approval of the Graduate School of Natural and Applied Sciences
Prof. Dr. Canan ÖZGEN
--------------------------------- Director
I certify that this thesis satisfies all the requirements as a thesis for the degree of Master of Science.
Prof. Dr. S. Kemal �DER
-------------------------------- Head of Department
This is to certify that we have read this thesis and that in our opinion it is fully adequate, in scope and quality, as a thesis for the degree of Master of Science.
Prof. Dr. Abdülkadir ERDEN
------------------------------------------ Supervisor
Examining Committee Members Prof. Dr. Bülent E. PLAT�N (METU, ME) -------------------------------- Prof. Dr. Abdülkadir ERDEN (METU, ME) -------------------------------- Yrd. Doc. Dr. �lhan KONUKSEVEN (METU, ME) -------------------------------- Yrd. Doc. Dr. Bu�ra KOKU (METU, ME) -------------------------------- Ögr. Gör. Kutluk Bilge ARIKAN (Atılım University, ME) -------------------
iii
I hereby declare that all information in this documentation has been obtained and presented in accordance with academic rules and ethical conduct. I also declare that, as required by these rules and conduct, I have fully cited and referenced all material and results that are not original to this work.
Name, Last name: Fahri Bu�ra ÇAMLICA Signature:

iv
ABSTRACT
DEMONSTRATION OF A STABILIZED HOVERING PLATFORM FOR
UNDERGRADUATE LABORATORY
Çamlıca, Fahri Bu�ra
M.S., Department of Mechanical Engineering
Supervisor: Prof. Dr. Abdülkadir Erden
December 2004, 90 pages
This research work covers the design, manufacture and testing of an
unmanned aerial vehicle for the purpose of testing various control systems by
undergraduate students in the laboratory environment. The aerial vehicle under
consideration is a four-rotor propeller powered. Aluminum rod based mechanical
structure is preferred. The stabilization of the hovering vehicle in its rotational axes
in the air and navigation about the yaw axis are the accomplished goals of this study.
The aerial vehicle is run in real time by using Matlab 6.5 Software’s xPc module.
The linear quadratic regulator and PD controllers are utilized to stabilize the aerial
vehicle in its rotation axes. To eliminate the measurement noise generated by the
sensors, low-pass second order transfer function is designed and its implementation
to real time experiments is discussed.
Keywords: Hovering Platform, LQR, PD, xPc, Low-pass Filter

v
ÖZ
L�SANS LABORATUARLARI ��N DENGELENM�� HAVALANAN
PLATFORM GÖSTER�S�
Çamlıca, Fahri Bu�ra
Yüksek Lisans, Makine Mühendisli�i Bölünü
Tez Yöneticisi: Prof. Dr. Abdülkadir Erden
Aralık 2004, 90 sayfa
Bu çalı�mada, lisans ö�rencilerinin labaratuvar ortamında, birçok kontrol
uygulamasının, üzerinde çalı�abilecekleri bir insansız hava aracı tasarlanmı�, imal
edilmi� ve ilk denemeleri sa�lanmı�tır. Kullanılan hava ta�ıtı dört pervaneli ve
alüminyum çubuk yapılı mekanik bir sistemdir. Ta�ıtın kendi eksenlerindeki
dönmesinin dura�an hale getirilmesi ve dikey eksendeki açı kontrolü bu çalı�amada
tamamlanmı�tır. Hava ta�ıtı, Matlab 6.5 programının xPc modülü ile gerçek zamanlı
çalı�tırılmı�tır. Hava ta�ıtını, dönme eksenlerinde dengeleyebilmek için do�rusal
karesel regülatör ve oransal-diferansiyel denetim uygulanmı�tır. Gerçek zamanlı
deneylerde, ikinci dereceden bir transfer fonksiyonu filtre tasarımı yapılmı� ve
uygulaması tartı�ılmı�tır.
Anahtar Kelimeler : Uçan Robot, Lineer Karesel Regülatör, PD, xPc, �kinci derece
transfer fonksiyon Filtresi

vi
I would like to thank to my love Özge for her endless support during my
study, O�ul, for his technical equipments, Onur, O�ul, Tolga and Ergün for being my
best friends. Also, special thanks to my family, Kutluk Bilge Arikan and Ali Emre
Turgut.
vii
TABLE OF CONTENTS
PLAGIARISM……………………………………………………………………... iii
ABSTRACT………………………………………………………………………... iv
ÖZ………………………………………………………………………………….. v
TABLE OF CONTENTS…………………………………………………………... vii
LIST OF TABLES………………………………………………………………..... ix
LIST OF FIGURES………………………………………………………………... x
CHAPTER
1. INTRODUCTION……………………………………………………... 1
1.1 Introduction………………………………………………………… 1
1.2 What is a Flying Robot?………………………………………….... 2
1.3 Aim and Scope of this Research…………………………………… 4
1.4 Outline……………………………………………………………… 5
2. THE UNMANNED AERIAL VEHICLE PROJECTS………………... 7
2.1 Overview…………………………………………………………… 7
2.2 Developing Technologies on M.A.V. and U.A.V………………….. 8
2.3 Some Promising Projects’ Comparison in Detail............................... 10
3. STRUCTURAL DESIGN, COMPONENT-BASED SELECTION
AND ANALYSIS……………………………………………………… 16
3.1 Structure…………………………………………………………..... 17
3.1.1 The Motors…………………………………………………. 20
3.1.2 Propeller……………………………………………………. 25
3.1.3 Gear System………………………………………………... 28
3.1.4 Sensors……………………………………………………... 28
3.2 Mathematical Modeling of the Hovering Platform………………… 29
viii
4. CONTROLLER DESIGN………………………………………………39
4.1 Linear Quadratic Regulator………………………………………… 39
4.2 Linearization of the State Equations……………………………….. 41
4.3 Controllability……………………………………………………… 45
4.4 Observability……………………………………………………….. 46
4.5 Noise Filtering……………………………………………………… 48
4.5.1 Low-pass Filter ……………………………………………. 51
5. EXPERIMENTAL DESIGN…………………………………………... 58
5.1 Experimental Setup………………………………………………… 58
5.2 Computer System…………………………………………………... 59
5.3 Electronic Components…………………………………………….. 61
5.4 Experiments.……………………………………………………….. 64
5.4.1 Motor Testing……………………………………………….64
5.4.2 System Experiments………………………………………...66
5.4.3 Sample Application………………………………………………… 70
6. CONCLUSIONS AND DISCUSSIONS………………………………. 74
REFERENCES………………………………………………………………… 76
APPENDICES
APPENDIX I: User’s Manual……………………………………………… 79
APPENDIX II: Controllability and Observability Matrices……………….. 90
ix
LIST OF TABLES
TABLES
Table 2.1 Classification of M.A.V. Research;The Plane Geometry………….. 8
Table 2.2 Classification of M.A.V. Research;The Single Rotor Geometry…...9
Table 2.3 Classification of M.A.V. Research;The Four Rotor Geometry……. 9
Table 2.4 Classification of M.A.V. Research;The Multi Rotor Geometry…… 10
Table 2.5 Classification of M.A.V. Research;The Helicopter Base Geometry. 10
Table 3.1 The Component base Weights of the Structure……………………. 19
Table 3.2 Robbe Power 280 Slow Fly Motor Technical Specifications……... 20
Table 3.3 Multi-Wire Cables Voltage vs. Ampere Chart…………………….. 21
Table 3.4 Single (thick) Wire Cables Voltage vs. Ampere Chart…………….. 22
Table 3.5 Single (Thin) Wire Cables Voltage vs. Ampere Chart…………….. 22
Table 3.6 Voltage-Ampere-Trust Measurements of the Motors……………… 23
Table 3.7 Self-Hover Values of each Motor………………………………….. 25
Table 3.8 Propeller Weights…………………………………………………...26
x
LIST OF FIGURES
FIGURES
Figure 2.1 The Mesicopter Design…………………………………………….. 11
Figure 2.2 The Black Widow Project………………………………………….. 12
Figure 2.3 University of British Columbia’s Purpose Built Robot……............. 13
Figure 2.4 Quad-Rotor Helicopter……………………………………………...15
Figure 3.1 Aluminum Based Structure, Drilled for Additional Components..... 17
Figure 3.2 The Proposed Design of the Hovering Platform…………………… 18
Figure 3.3 Metal Cast of the Propulsion System…………………………......... 18
Figure 3.4 Cantilever Beam that is used in Experiments.................................... 23
Figure 3.5 Voltage vs. Trust Values for Motor A............................................... 24
Figure 3.6 Voltage vs. Trust Values for Motor B............................................... 24
Figure 3.7 Voltage vs. Trust Values for Motor C............................................... 24
Figure 3.8 Voltage vs. Trust Values for Motor D............................................... 25
Figure 3.9 Angular Velocity vs. Output Voltage Characteristics........................ 29
Figure 3.10 The Body Frame Coordinates of the Platfrom................................... 30
Figure 4.1 Linear Quadratic Regulator................................................................ 40
Figure 4.2 Sensor Measurement Noise Data....................................................... 49
Figure 4.3 Measurement Signal...........................................................................50
Figure 4.4 Fast Fourier Transform of the Measurement Signal.......................... 52
Figure 4.5 FFT Result of the Measurement Signal............................................. 53
Figure 4.6 Bode Plot of the 2nd order Transfer Function................................... 55
Figure 4.7 Unfiltered & Filtered Measurement Signal of Angular Velocity, p.. 56
Figure 4.8 Unfiltered & Filtered Measurement Signal of Angular Velocity, q.. 56
Figure 4.9 Unfiltered & Filtered Measurement Signal of Angular Velocity, r... 57
Figure 5.1 The Manufactured Vehicle................................................................ 59
Figure 5.2 Experimental Setup Metal Cast......................................................... 59
Figure 5.3 xPc Computer Configuration............................................................. 60

xi
Figure 5.4 Data Acquisition Card of Humusoft MF614......................................61
Figure 5.5 Sensors Mounted at the Center of Gravity......................................... 61
Figure 5.6 PIC Cards........................................................................................... 63
Figure 5.7 Motor Drivers.....................................................................................63
Figure 5.8 Electronic Hardware Flowchart......................................................... 64
Figure 5.9 Motor Test Simulink Model...............................................................65
Figure 5.10 Sensor Model..................................................................................... 66
Figure 5.11 PID Controller Model........................................................................ 67
Figure 5.12 Overall Controller Structure.............................................................. 69
Figure 5.13 The Stabilized yaw angle................................................................... 71
Figure 5.14 Rotation about z-axis – yaw angle with the given reference inputs...71
Figure 5.15 Computer Result of Angular Velocity p............................................ 72
Figure 5.16 Real-time Result of Angular Velocity p............................................ 72
Figure 5.17 Computer Result of Angular Velocity q............................................ 72
Figure 5.18 Real-time Result of Angular Velocity q............................................ 72
Figure 5.19 Computer Result of Angular Velocity r............................................. 73
Figure 5.20 Real-time Result of Angular Velocity r............................................. 73

1
CHAPTER I
INTRODUCTION
1.1 Introduction
The flying robot is one of the emerging research topics among the unmanned
aerial vehicles. A flying robot can be defined as a hovering platform with robotic
features, which may be in different sizes and various mission capabilities. Flying
robots can be considered as sensor platforms with six-degrees of freedom. Stabilizing
and guidance of these hovering platforms are common and basic tasks that have to be
accomplished before assigning a mission to the vehicle. Several universities and
research centers have initiated flying robot projects in the level of bachelor’s, masters
and doctorate level for many years over last two decades.
Mission capability and intelligent guidance are long lasting projects in the
flying robot technology. A flying robot can have varying mission capabilities. The
major goal of this study consists of manufacturing and stabilizing of a flying robot,
which can have different capabilities for use in undergraduate laboratories. The
guidance of the vehicle along the inertial axes is not the primary concern in this
project. No other missions such as vertical take-off and landing are expected from
the hovering platform except stabilizing itself in the air with respect to its body frame
axes. The structure of the investigated aerial vehicle in this study consists of a plus
sign shape rigid geometry and four motors assembled to the end nodes of the frame.
Each motor has a gear system and a propeller to generate the required lifting force.
Three gyroscopes are used to sense the three axes rotation motions of the platform.
2
External power supplies and computer support are provided. Matlab 6.5 / Simulink
package program is used to simulate control and analyze the hovering vehicle. The
selected control algorithm is the Linear quadratic regulator and a PD controller
combined with a filter. The PD controller is used to navigate the rotation of the
vehicle about the z-axis of the body frame of the hovering vehicle. The use of low-
pass filter is investigated to eliminate the measurement noise.
1.2 What is a Flying Robot?
Before introducing the definition of a flying robot, it may be proper to first
describe and differentiate Micro Aerial Vehicles (M.A.V.) and the Unmanned Aerial
Vehicles (U.A.V.) [Michelson R. C., 2000].
A Micro Aerial Vehicle (M.A.V.) is a semiautonomous hovering vehicle, sizing less
than approximately 0.15 m in any dimension, mass about 0.115 kg, has a range of
approximately up to 10 km, and a top speed of up to 50 km/h that can accomplish an
useful military mission at an affordable cost (less than $1,000 if it is one time use
disposable system). The aerial vehicle has to be durable enough from 20 minutes to 2
hours to accomplish a given task. M.A.V. may be regarded as a sensor platform with
a "six-degrees-of-freedom" that will enable a broad spectrum of small-unit and
special operations. Missions might include video and multi-spectral (infrared)
reconnaissance and surveillance, battle-damage assessment, targeting of weapons on
key installations, placement of autonomous sensors, communication systems, or the
detection of hazardous substances or land mines. The aerial vehicle is expected to
satisfy the nominal performance goals including real-time imaging, navigation, and
communications capabilities. Other applications include monitoring hostage
situations or weapons-ban treaties, patrolling national borders, and searching for
disaster survivors. Another crucial requirement for the M.A.V. lies in its ability to
prevent itself from being seen and heard. If detected, it should not explicitly display
its presence away nor compromise the operator's location. As a result, an optimally
3
designed/configured M.A.V. has to be as close as possible to a flying sensor chip. On
the other hand, an Unmanned Aerial Vehicle (U.A.V.) can be described as a
preliminary version of a M.A.V. The above-mentioned tasks, control systems, motor
and energy unit equipments and all electronic stuff are first tested and embedded on a
U.A.V. If the requested goal is achieved in success, these new accessories and
control or design logics can be tried to be integrated on a M.A.V.
Among the specific significant engineering challenges that researchers are focusing
on for the development of successful M.A.V. and U.A.V. exist ultra-compact,
lightweight, high-power and high-energy-density propulsion and power sources;
untraditional concepts for lift generation; flight stabilization and control for
aerodynamic environments with very low Reynolds numbers; secure, low-power
onboard electronic processing and communications with sufficient bandwidth for
real-time imaging; micro-gyroscopes and inertial measurement units (I.M.U.) and
very small onboard guidance, navigation, and geo-location systems. To be really
useful, a M.A.V. needs to carry a short-range day/night area imaging system with a
sufficient resolution. The system must feature an accurate geo-location capability. A
sufficient vehicle range and real-time communications are also desired. Also, M.A.V.
has to be lightweighted and robust enough to be carried in a backpack [Keennon
M.T., 2002].
The fundamental difference between a M.A.V. and an U.A.V. is the physical size of
the vehicle. The size of all the electronic components and the overall physical
structure of a M.A.V. are smaller than the size of an U.A.V.
In general, the control architecture and core missions are similar. However, M.A.V.s
have more engineering problems because of their smaller dimensions, which can
create low-level dynamics as well as manufacturing and control problems. U.A.V.s
are being used commercially in many applications especially in military and even
also in toy industry.

4
1.3 Aim and Scope of this Research
This thesis consists of developing an U.A.V.. In 2002, the design and
manufacture of an aerial vehicle were completed as a three-month term project
within the course ME 462, at the Middle East Technical University (METU), Turkey.
Student teams in this course designed a plus sign shaped Aluminum structure with
four electrically powered, propeller based propulsion sets and a controller. The main
goal of the manufactured aerial vehicle was to stabilize itself in the hover conditions.
The structure of the U.A.V.s were around 40-45 cm in all dimensions without
propellers. An externally plugged and nearby located power source for the
mechanical system was selected for the propulsion set and the controller. The
hovering platform dynamics considered in the controller design were simplified. A
PD controller is selected to stabilize the vehicle. Maneuvering and guidance of the
aerial vehicle were not among the goals of the project. Three gyroscopes that were
located at the center of gravity sensed the mechanical structure’s rotation rates in
terms of body frame components. An off-board processor and a terminal ground
based computer communicated to process the data received by the sensors and drive
the motors. Matlab 6.5 / Simulink package program was used as the real time
controller. However, the aerial vehicle could not lift and stabilize itself.
In this thesis, a similar mechanical structure and configuration is chosen. Similar
mechanical components are used to build a more robust structure. Calculations and
tests are performed in detail to adopt the aerial vehicle to the real time environment
and to design a robust controller. A new control algorithm is chosen and applied on
the aerial vehicle. A Linear quadratic regulator (LQR) controller and a PD controller
are chosen for the considered problem. Three gyroscopes are used to sense the
system states. The six-degrees of freedom platform system that consists of inertial
measurement units can be considered as an experimental setup for undergraduate
laboratories. In laboratory, it is proposed to test the noisy environment of the plant
and sensor measurements, controllers and filter designs tools. On the other hand,
stabilizing the vehicle in the air, guidance and different mission capabilities can be
5
integrated and experimented. Such a system can assist the undergraduate students to
learn and simulate more in control systems, manufacturing and design.
During this study, it is observed that the three gyroscopic sensors are not enough for
such an unmanned aerial vehicle project. For a six-degree of freedom system, the
vehicle motion in all directions about and along the body frame axes have to be
measured for a complete navigation and guidance. An observability problem arises
when there are unmeasured states. In this study, some of the governing states of the
equations of motion can not be measured. The foregoing observability problem is
considered. The sensed plant and measurement noises of the aerial vehicle are not
omitted during computer simulations and real time experiments. The effects of the
disturbances/noises are taken into consideration. Flat earth, principal axes and rigid
vehicle frame assumptions are made to simplify the leading motion equations. A
low-pass filter is designed to reduce the system noise and adapted to the aerial
vehicle in real time. Matlab 6.5 / Simulink software is used to process the received
sensor data and simulate the aerial vehicle behavior on the computer. As a result,
stabilization of the manufactured aerial vehicle in the air is successfully
accomplished. Additionally, a PD controller navigates the yaw angle of the vertical
axis of the body frame of the hovering vehicle.
1.4 Outline
The rest of the thesis is organized as follows. Chapter II presents a literature
review of the state-of-the-art in three main subjects, namely overview, developing
technologies on M.A.V. and U.A.V. and comparison of some promising projects in
detail. In Chapter III, the physical component design, manufacture and selection
steps are outlined. The DC motor, gear and propeller selections are detailed.
Experimental tests are given. An overview of the mathematical model, governing
equations and force relations are developed. In Chapter IV, Linear quadratic
regulator controller is given in detail. The observability and controllability are

6
checked. Various filter designs are proposed to overcome the noise problem of the
plant and the sensor measurement noises. In Chapter V, the experimental setup is
defined. A computer simulation is performed and its experimental results are
investigated. In the last chapter, the results and future work are stated.
7
CHAPTER II
THE UNMANNED AERIAL VEHICLE PROJECTS
2.1 Overview
It is apparent that each discipline of engineering has different approaches to
M.A.V. and U.A.V.. Especially, mechanical engineers, electric-electronic engineers,
aerospace engineers have a great interest in manufacturing and controlling of these
aerial vehicles. Mechanical engineers focus on manufacturing of the aerial vehicle
structure, mathematical modeling and controller design. Moreover, reducing the
mass of the components, researching new power sources and manufacturing the
smallest mechanical hardware are other crucial research topics for mechanical
engineers. Electric-electronic engineers prefer to study on already-manufactured
mechanism like remote control (R/C) planes or helicopters and focus on the
controller design, inertial measurement units, new power units and power
consumption optimization. Aerospace engineers, especially consider the problem of
designing sub-power systems like propeller manufacturing, low Reynold’s number
behaviors, aerodynamic effects and flight dynamics. Other disciplines of sciences
like statistics and industrial engineering contribute to the problem in the context of
computer algorithms, mathematical modeling, controller design and logics, and
component based optimization tools.

8
2.2 Developing Technologies on M.A.V. and U.A.V.
It is possible to classify the previous researches on M.A.V and U.A.V.
according to the structural, mechanical, sensory equipment or proposed mission
goals. Every mechanical component or controller specification, which is a
distinguishable aspect for such aerial vehicles, has its own technological
development. Thus, different comparisons can be performed among each hardware
and software of the aerial vehicles. In this study, the classification is based on the
structural design and propulsion types of the vehicles that were previously studied.
The comparisons are summarized in the Tables 2.1 to 2.5. Currently, there are many
propulsion type alternatives available. Among the most widely used propulsion type
alternatives, the best ones are the propeller power, fuel power, gas power and
flapping wing power. The selection of the propulsion type is based on the structure
preferred. On the other hand, the selected comparison criteria for the aerial vehicles
affect many other specifications. As an example, the criteria based on the number of
sensors used affect the controller selection. Also, the capacity of the power source
deduces the hover time of the vehicle. The propulsion type directly affects the
structural geometry of the hovering vehicles.
Table 2.1. Classification of M.A.V. Research; The Plane Geometry
University or Institute Project Physical Properties Controller Sensors Electronics Reference
AeroVironment Inc.
Black Widow –
Micro Aerial Vehicle
6 inch span,
fixed wing aircraft,
30 mph speed, endurance of 30 minutes, maximum communication range of 2 km., maximum altitude of 769 ft,
a mass of 80 g. and an autopilot.
On the plant, altitude hold, yaw damping
controls heading hold and air speed
hold
Axes magnetometer an absolute pressure sensor piezoelectric gyro
2 g. camera, 2 g. video downlink transmitter, 5 g. R/C system with 0.5 g. actuators,
two microprocessors
[Keennon M. T.,
Grasmayer J. M., 2002]
9
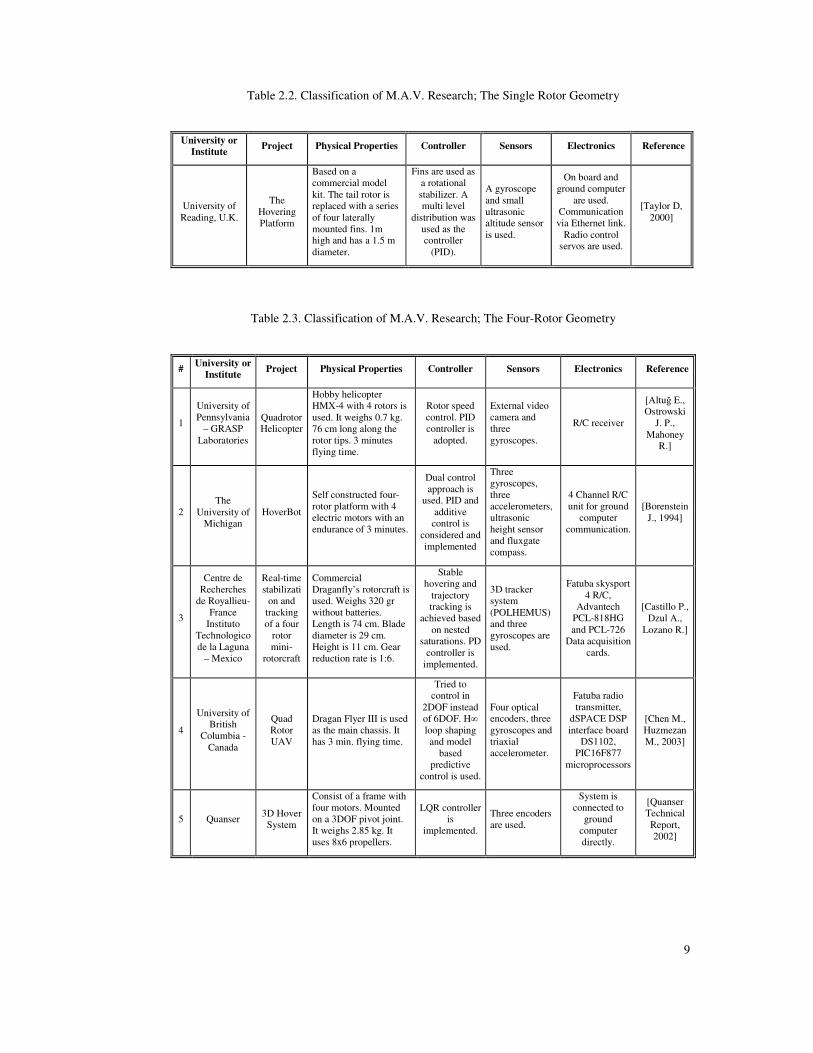
Table 2.2. Classification of M.A.V. Research; The Single Rotor Geometry
University or Institute Project Physical Properties Controller Sensors Electronics Reference
University of Reading, U.K.
The Hovering Platform
Based on a commercial model kit. The tail rotor is replaced with a series of four laterally mounted fins. 1m high and has a 1.5 m diameter.
Fins are used as a rotational stabilizer. A multi level
distribution was used as the controller
(PID).
A gyroscope and small ultrasonic altitude sensor is used.
On board and ground computer
are used. Communication via Ethernet link.
Radio control servos are used.
[Taylor D, 2000]
Table 2.3. Classification of M.A.V. Research; The Four-Rotor Geometry
# University or Institute Project Physical Properties Controller Sensors Electronics Reference
1
University of Pennsylvania
– GRASP Laboratories
Quadrotor Helicopter
Hobby helicopter HMX-4 with 4 rotors is used. It weighs 0.7 kg. 76 cm long along the rotor tips. 3 minutes flying time.
Rotor speed control. PID controller is
adopted.
External video camera and three gyroscopes.
R/C receiver
[Altu� E., Ostrowski
J. P., Mahoney
R.]
2 The
University of Michigan
HoverBot
Self constructed four-rotor platform with 4 electric motors with an endurance of 3 minutes.
Dual control approach is
used. PID and additive
control is considered and implemented
Three gyroscopes, three accelerometers, ultrasonic height sensor and fluxgate compass.
4 Channel R/C unit for ground
computer communication.
[Borenstein J., 1994]
3
Centre de Recherches
de Royallieu-France
Instituto Technologico de la Laguna
– Mexico
Real-time stabilizati
on and tracking of a four
rotor mini-
rotorcraft
Commercial Draganfly’s rotorcraft is used. Weighs 320 gr without batteries. Length is 74 cm. Blade diameter is 29 cm. Height is 11 cm. Gear reduction rate is 1:6.
Stable hovering and
trajectory tracking is
achieved based on nested
saturations. PD controller is
implemented.
3D tracker system (POLHEMUS) and three gyroscopes are used.
Fatuba skysport 4 R/C,
Advantech PCL-818HG and PCL-726
Data acquisition cards.
[Castillo P., Dzul A.,
Lozano R.]
4
University of British
Columbia - Canada
Quad Rotor UAV
Dragan Flyer III is used as the main chassis. It has 3 min. flying time.
Tried to control in
2DOF instead of 6DOF. H� loop shaping and model
based predictive
control is used.
Four optical encoders, three gyroscopes and triaxial accelerometer.
Fatuba radio transmitter,
dSPACE DSP interface board
DS1102, PIC16F877
microprocessors
[Chen M., Huzmezan M., 2003]
5 Quanser 3D Hover System
Consist of a frame with four motors. Mounted on a 3DOF pivot joint. It weighs 2.85 kg. It uses 8x6 propellers.
LQR controller is
implemented.
Three encoders are used.
System is connected to
ground computer directly.
[Quanser Technical Report, 2002]
10
Table 2.4. Classification of M.A.V. Research; The Multi-Rotor Geometry
University or Institute Project Physical Properties Controller Sensors Electronics Reference
University of British
Columbia , Canada
A Purpose Built Robot
It consists of seven propellers. One main propeller centered around six small control propellers. Powered by 17 hp engine. Belt system is used to distribute the power.
Separate PID controller for
each degree of freedom. They
have implemented a
H� on the plant.
Inertial gyroscope, differential GPS unit, fluxgate compass and a sonar is used.
High-resolution camera. On
board ad ground control stations. Communication
via wireless modem module.
[Gibb J., Jones C., Lee T., 2001]
Table 2.5. Classification of M.A.V. Research; The Helicopter Base Geometry
University or Institute Project Physical Properties Controller Sensors Electronics Reference
Circuit Cellar Internet Control
3 DOF helicopter model is used. External power system is provided.
LQR controller is implemented.
Optical encoders are used.
Data acquisition and controller board is used.
[Apkajian J., 1999]
2.3 Comparison of Some Promising Projects in Detail
Different aerial vehicle projects are being studied in many universities,
research institutes and commercial organizations. These projects differ
approximately in every mechanical component and controller design from each
other. Each research group tries to make an untraditional vehicle in some aspect. It is
possible to group these projects into categories to study in detail. The premier
categorization can be in the structural design. Each research group manufactures
their own structural design. These designs vary according to the proposed mission.
Large structures are preferred for outdoor applications while the smaller ones are
used for the spy games. The structural selection and manufacturing of the hovering
vehicle is a result of experience and aim.
11
The Stanford University’s “Mesicopter” project, shown in Figure 2.1, is a perfect
example to micro aerial vehicles. The group has built the smallest air vehicle in the
world. The vehicle does not have an onboard controller. An external computer is
provided to control the structure.
Fig. 2.1 Mesicopter Design
The Mesicopter vehicle weighs about 3 grams. The structure of the frame is just 1.5
cm square elastic rubber. The special propellers and the brushless DC motors are
manufactured at their rapid prototyping laboratory. Four DC motors and propellers
are mounted at the corners of the square shaped structure of the vehicle.
Unfortunately, the tiny vehicle dimensions have resulted in low Reynold Number
dynamics problems. Mesicopter consists of embedded super capacitors. These
capacitors are used as a power source. The goal of this project is to build a M.A.V.
with only hovering components like housing structure, motors, propellers and power
sources. The vehicle is able to fly up to three minutes with its own power sources.
No sensors are mounted on the structure because of its small dimensions. Only open
12
loop control can be performed. Development of inertial measurement units for tiny
vehicle dimensions is being studied. [Kroo I., 2001]
On the other hand, AeroVironment Inc, a commercial company, designed the “Black
Widow”, shown in Figure 2.2. A wing based vehicle structure is preferred in this
project. They built the lightest autonomous flying plane ever made. The mass of their
vehicle is about 80 g It has a 48 km/h maximum flight speed with an endurance of 30
minutes flight time and a maximum altitude of approximately 250 m. This vehicle is
the best durable U.A.V..
The propulsion set components of “Black Widow” is selected among the
commercially available alternatives. Industrial engineers do component-based
selection of the mechanical components. World’s lightest color video camera that
downlinks to a ground computer is adapted to the vehicle. Magnetometer, absolute
pressure sensor and a piezoelectric gyroscope are selected as the inertial
measurement unit. The M.A.V. project, “mesicopter”, is only a laboratory
experiment vehicle and has no great impact on real life but Black Widow fulfils all
the requirements to be a M.A.V. and it is the first award winning micro aerial vehicle
project in the world.
Fig. 2.2 The Black Widow Project

13
The foregoing studies have shown that the best stable aerial vehicles are the ones that
use four propellers on the structure. It is clear that there are many alternatives for a
propeller to be used on such an aerial vehicle. There are research projects where
many propellers are used like University of Columbia’s “A Purpose Built Robot”
project shown in Figure 2.3. Seven propellers are used on their vehicle. It has one
main propeller centered to the vehicle and the rest six small control propellers are
mounted to the sides. The design considered is an U.A.V.. It uses a 17 hp gasoline
engine. It is an expensive and hard to balance aerial vehicle. The vehicle is capable
of vertical takeoff and landing, hover and translation or rotation in any directions. To
balance and navigate the vehicle, many sensors are suited. Beside the standard
gyroscopes, GPS and sonar are used. To control the vehicle with these sensors, non-
classical control methods are implemented. The vehicle can lift and stabilize itself.
Fig 2.3. University of British Columbia’s “Purpose Built Robot”
Beside the multi propeller based vehicles, single propeller based vehicles like
University of Readings’ “The Hovering Platform” project is proposed. A
commercially available helicopter kit is used as the structure of this vehicle. The
rotor disk diameter of the helicopter is 1.5 m. The most significant modification is
the replacement of the tail rotor with a series of four laterally mounted fins. These
14
fins are used as a part of the rotational stability feedback loop to counteract the
rotational forces applied to the body of the aircraft during flight. The fins are
mounted on the platform at an angle directly underneath the main rotors. A small
ultrasonic altitude sensor and a small solid-state gyroscope are used to sense the
elevation and rotation rates. These fins are used to transform energy from the
downdraft produced by motor blades into a torque on the body of the hovering
platform. Two experiments are conducted on the vehicle to test if the vehicle can
hover or not resulting with a failure and a success. The clever idea of hovering
mechanism of the project needs more experiments to be more robust. Using four
propellers on an unmanned aerial vehicle is a general approach. This geometry and
rotational array of design are easy to implement, stabilize and control rather that the
other alternatives. Increasing or decreasing the motor voltages simply stabilizes and
guide the vehicles. Four-rotor rotational array geometry is simple and efficient for
propeller-based designs. University of Pennsylvania’s “Quadrotor helicopter”
project, The University of Michigan’s “HoverBot” and Centre de Recherches de
Royallieu –France’s “Rotorcraft” projects are simple examples to this claim. Plus
sign shape geometry is another common aspect for all three aerial vehicles. The DC
motors and propellers are similar, too.
All three of the projects have their own onboard power supply and have a similar
flight time of approximately three minutes. The lightest one is the “Rotorcraft”
project. Its mass is 0.5 kg while the heaviest one is the “Quadrotor” project with its
0.8 kg mass. PD controller is a common controller for three of the vehicles. The most
robust one is the “HoverBot” project. The “HoverBot” vehicle consist of three
gyroscopes, three accelerometers, ultra sonic height sensor and a flux gate compass
while the quadrotor has only an external camera and three onboard gyroscopes and
rotorcraft consists of a tracker system and three gyroscopes.
It is possible to say that, using many sensors increase the robustness of the
implemented controller to the vehicle. Increasing the number of sensors used in the
vehicle eliminates the observability problem and avoids using difficult and hard to
implement controller algorithms for the aerial vehicles. Additionally, “Rotorcraft”

15
team has reported that one cannot stabilize a hovering vehicle with only three
gyroscopes [Chen M., Huzmezan M., 2003]. Usually, hovering platforms are six
degrees of freedom motion vehicles and to control the vehicle the states have to be
observed. The number of sensors is directly related with which states can be
estimated and observed. Affordability of these sensor devices is the cost of using
many sensors. The “HoverBot” project is the most expensive system among the other
alternatives.
Fig 2.4 Quad-Rotor Helicopter
A common approach in designing aerial vehicles is to use commercially available
helicopter kit structures. Generating the required thrust force for hovering is not a
crucial task for these helicopter kit structures. Gasoline powered engines and
propellers with approximate radius of 2 m provide the necessary power for hovering
and navigating. Different competitions among these aerial vehicle developer groups
are made in every year around the world. The competitors are required to complete
the given missions.
16
CHAPTER 3
STRUCTURAL DESIGN, COMPENENT-BASED SELECTION AND
ANALYSIS
The ME 462 course project student teams built their own four-rotor hovering
vehicles, which are similar to previously mentioned four-rotor type aerial vehicles.
The ME 462 course project was the frontier model, which was examined on hovering
vehicles. In this thesis, a new and robust four-rotor structure is proposed and built.
The structural frame of the aerial vehicle is similar to its alternatives previously built
in ME 462 course project. The designed structure of the vehicle was manufactured
with the mechanical and electronical components that are already available at the
M.E.T.U. control laboratory. The power unit, which consists of a DC motor,
propeller and a gearbox was assembled. The sensory equipment was mounted. The
system was not tuned or prepared to flight in the level of manufacturing. A brief
summary is given about the manufacturing levels of the vehicle in this chapter. The
mechanical design of the vehicle is split into categories of overall structure, motor,
power system, gear, propeller and sensory equipment. The structural design and
governing mathematical equation parameter calculations were performed in
AutoCAD 2002 computer package program.

17
3.1 Structure
The previous studies in the literature and the experience on the ME 462
course project have shown that, the best geometry for such a hovering platform
project is the plus sign shape geometry. Alternative vehicle geometries are not
proposed in this thesis and it was decided to use the plus sign shape that had been
used in ME 462 projects. The stability of the plus sign frame geometry and its simple
equations of motion were an advantage during this first time hovering platform
demonstration. On the other hand, manufacturing the vehicle in plus sign shape
geometry is quite easy. Four power units that are attached to the end nodes of the
plus sign shape is the best and common array in these vehicles. Triangular array of
power units on the structure, single rotor or multi propeller power units are hard to
manufacture, balance and control. For the sake of this thesis, it is decided to build the
hovering vehicle in four-rotor type, which consist the use of Aluminum, rectangular
shell tubes in the structure given in the Figure 3.1. An overall design of the hovering
vehicle is shown in Figure 3.2. The Aluminum tubes, which are use in the structure,
have a length of 500 mm and a shell thickness of 1 mm. Also, there are other rod
material alternatives. Carbon tubes are a strong choice as a structural material. The
reason of using carbon as rod material is its super lightweight and strength against
impacts. The Aluminum-based structure has a low payload on vehicle mass and as
rigid as to carry the power and the control units. The total mass of the Aluminum
rods is 115 g.
Fig. 3.1 Aluminum based structure, drilled for additional components.
18
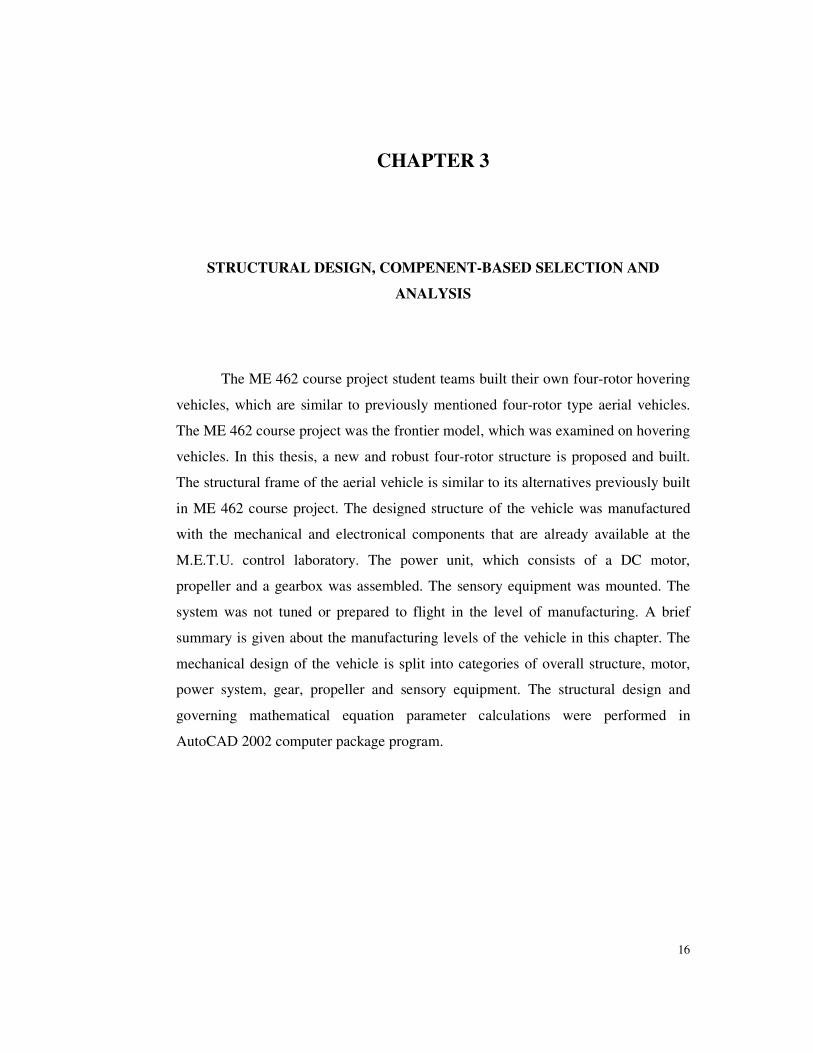
Fig 3.2.The Proposed Design of the Hovering Platform.
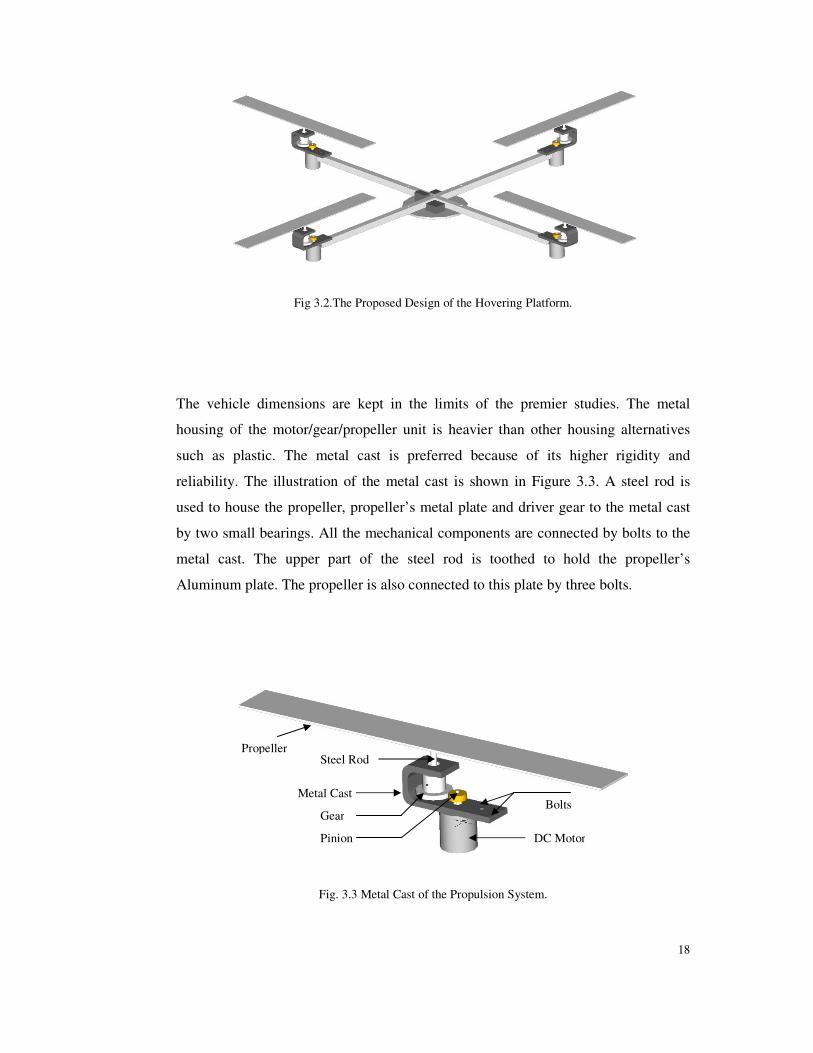
The vehicle dimensions are kept in the limits of the premier studies. The metal
housing of the motor/gear/propeller unit is heavier than other housing alternatives
such as plastic. The metal cast is preferred because of its higher rigidity and
reliability. The illustration of the metal cast is shown in Figure 3.3. A steel rod is
used to house the propeller, propeller’s metal plate and driver gear to the metal cast
by two small bearings. All the mechanical components are connected by bolts to the
metal cast. The upper part of the steel rod is toothed to hold the propeller’s
Aluminum plate. The propeller is also connected to this plate by three bolts.
Fig. 3.3 Metal Cast of the Propulsion System.
Propeller
Metal Cast
Gear
Pinion DC Motor
Bolts
Steel Rod
19
The power source for the DC motors is not placed on the vehicle because of the mass
limitations. External power supply that can provide 12 Volts supported by 12
Ampere is sufficient for such a hovering vehicle project. Placing power equipments
like cellular battery packs on the vehicle can be possible if lighter and efficient DC
motors can be used. Matlab 6.5 / Simulink package program is preferred to control
and simulate the hovering platform in real time by a data acquisition card. Motor
drivers were built to link between the DC motors and the PIC cards of the system.
These drivers were used to control the voltage inputs by computer. The control
architecture will be explained in the next chapter. Also, the following assumptions
are made for developing the mathematical equations of the hovering vehicle;
• Rigid airframe,
• Flat Earth (i.e. gravity is taken to be in the vertical z direction with
respect to world fixed frame),
• Cartesian coordinates are fixed to the vehicle’s center of gravity ,
• Earth-fixed reference frame is treated as the inertial reference frame,
• The body frame is assumed to be the principal frame thus the inertia
matrix has only the diagonal elements.
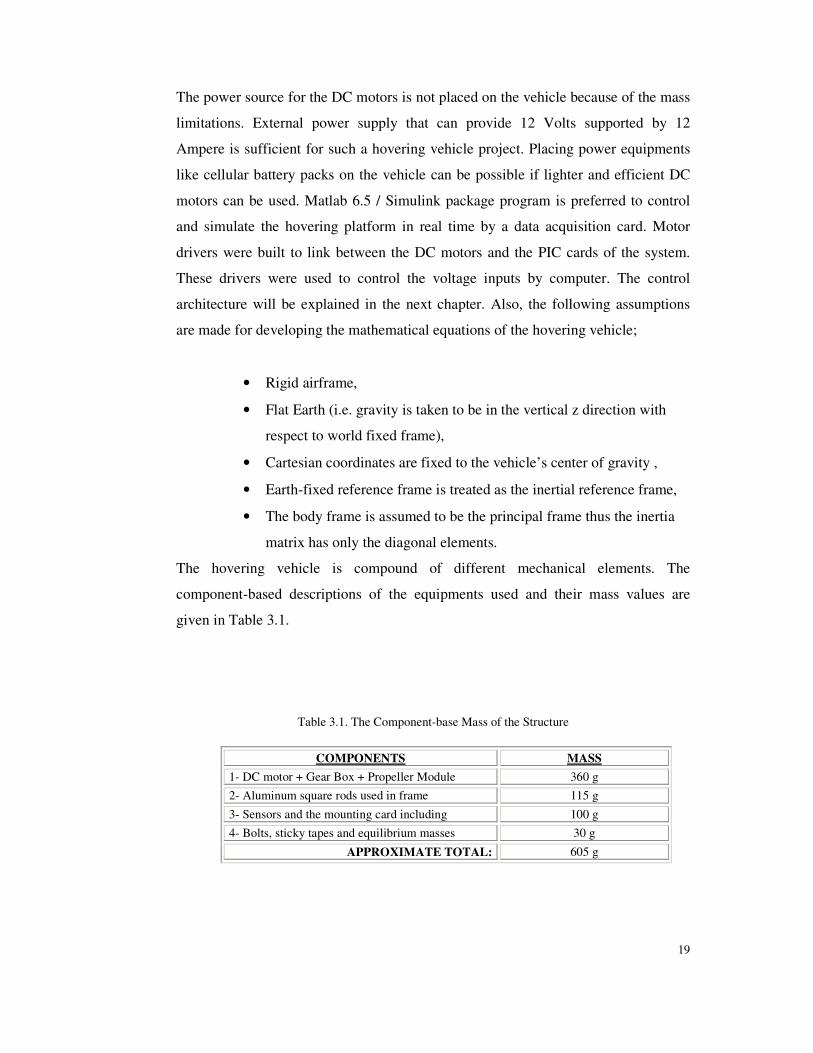
The hovering vehicle is compound of different mechanical elements. The
component-based descriptions of the equipments used and their mass values are
given in Table 3.1.
Table 3.1. The Component-base Mass of the Structure
COMPONENTS MASS 1- DC motor + Gear Box + Propeller Module 360 g 2- Aluminum square rods used in frame 115 g
3- Sensors and the mounting card including 100 g 4- Bolts, sticky tapes and equilibrium masses 30 g
APPROXIMATE TOTAL: 605 g
20
3.1.1 Motors
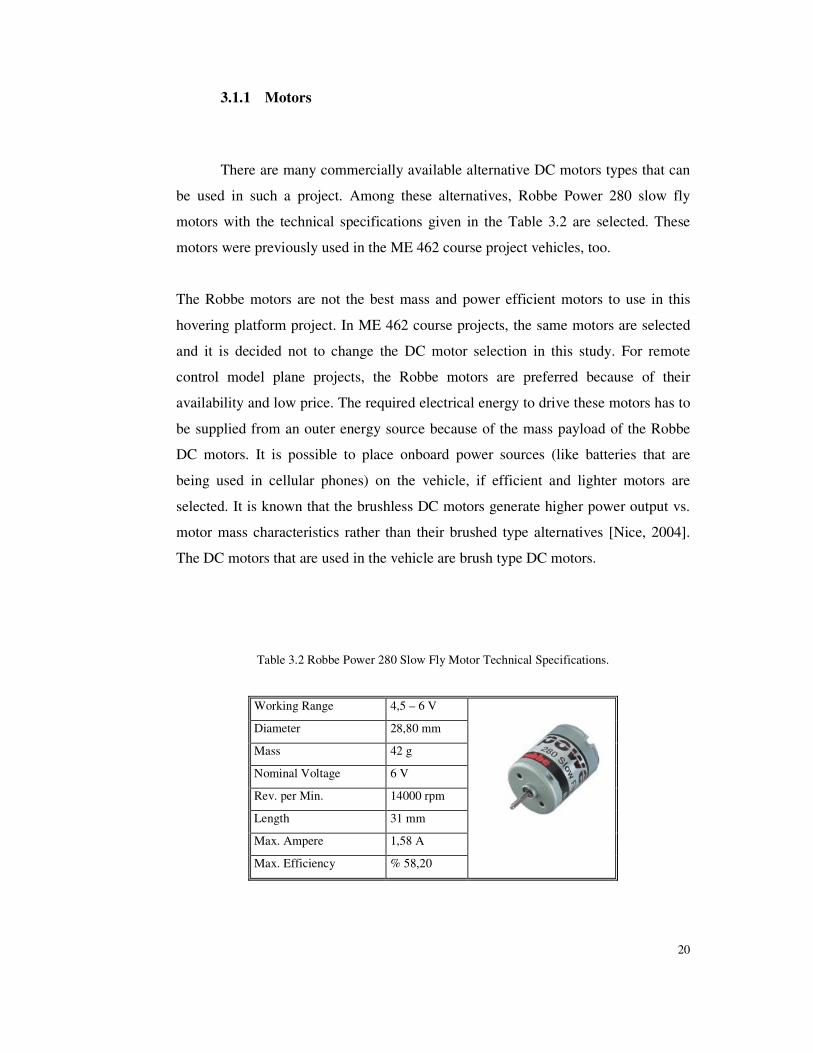
There are many commercially available alternative DC motors types that can
be used in such a project. Among these alternatives, Robbe Power 280 slow fly
motors with the technical specifications given in the Table 3.2 are selected. These
motors were previously used in the ME 462 course project vehicles, too.
The Robbe motors are not the best mass and power efficient motors to use in this
hovering platform project. In ME 462 course projects, the same motors are selected
and it is decided not to change the DC motor selection in this study. For remote
control model plane projects, the Robbe motors are preferred because of their
availability and low price. The required electrical energy to drive these motors has to
be supplied from an outer energy source because of the mass payload of the Robbe
DC motors. It is possible to place onboard power sources (like batteries that are
being used in cellular phones) on the vehicle, if efficient and lighter motors are
selected. It is known that the brushless DC motors generate higher power output vs.
motor mass characteristics rather than their brushed type alternatives [Nice, 2004].
The DC motors that are used in the vehicle are brush type DC motors.
Table 3.2 Robbe Power 280 Slow Fly Motor Technical Specifications.
Working Range 4,5 – 6 V
Diameter 28,80 mm
Mass 42 g
Nominal Voltage 6 V
Rev. per Min. 14000 rpm
Length 31 mm
Max. Ampere 1,58 A
Max. Efficiency % 58,20
21
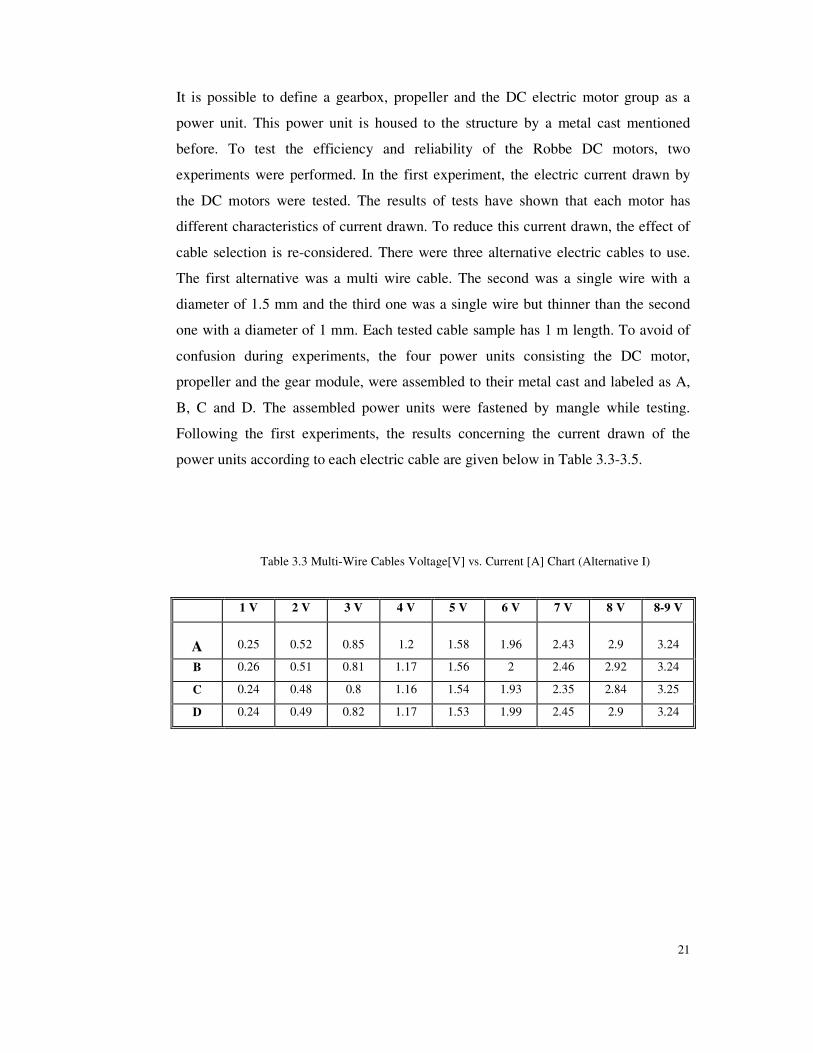
It is possible to define a gearbox, propeller and the DC electric motor group as a
power unit. This power unit is housed to the structure by a metal cast mentioned
before. To test the efficiency and reliability of the Robbe DC motors, two
experiments were performed. In the first experiment, the electric current drawn by
the DC motors were tested. The results of tests have shown that each motor has
different characteristics of current drawn. To reduce this current drawn, the effect of
cable selection is re-considered. There were three alternative electric cables to use.
The first alternative was a multi wire cable. The second was a single wire with a
diameter of 1.5 mm and the third one was a single wire but thinner than the second
one with a diameter of 1 mm. Each tested cable sample has 1 m length. To avoid of
confusion during experiments, the four power units consisting the DC motor,
propeller and the gear module, were assembled to their metal cast and labeled as A,
B, C and D. The assembled power units were fastened by mangle while testing.
Following the first experiments, the results concerning the current drawn of the
power units according to each electric cable are given below in Table 3.3-3.5.
Table 3.3 Multi-Wire Cables Voltage[V] vs. Current [A] Chart (Alternative I)
1 V 2 V 3 V 4 V 5 V 6 V 7 V 8 V 8-9 V
A 0.25 0.52 0.85 1.2 1.58 1.96 2.43 2.9 3.24
B 0.26 0.51 0.81 1.17 1.56 2 2.46 2.92 3.24
C 0.24 0.48 0.8 1.16 1.54 1.93 2.35 2.84 3.25
D 0.24 0.49 0.82 1.17 1.53 1.99 2.45 2.9 3.24
22
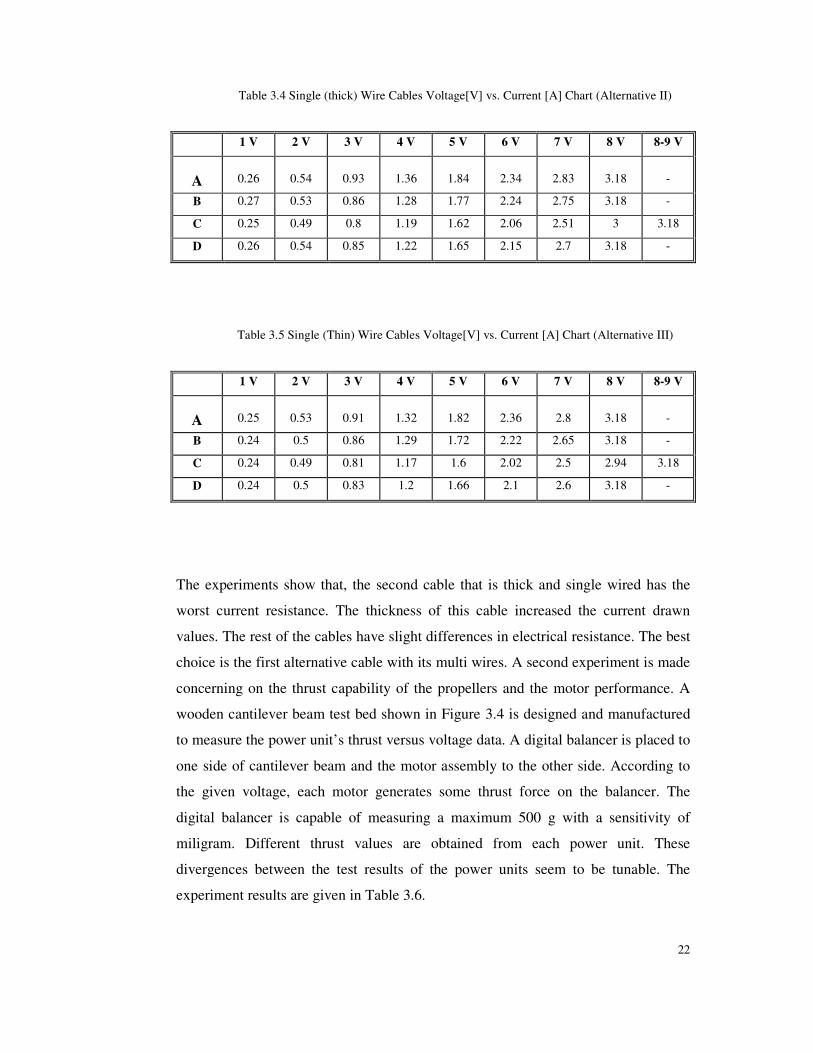
Table 3.4 Single (thick) Wire Cables Voltage[V] vs. Current [A] Chart (Alternative II)
1 V 2 V 3 V 4 V 5 V 6 V 7 V 8 V 8-9 V
A 0.26 0.54 0.93 1.36 1.84 2.34 2.83 3.18 -
B 0.27 0.53 0.86 1.28 1.77 2.24 2.75 3.18 -
C 0.25 0.49 0.8 1.19 1.62 2.06 2.51 3 3.18
D 0.26 0.54 0.85 1.22 1.65 2.15 2.7 3.18 -
Table 3.5 Single (Thin) Wire Cables Voltage[V] vs. Current [A] Chart (Alternative III)
1 V 2 V 3 V 4 V 5 V 6 V 7 V 8 V 8-9 V
A 0.25 0.53 0.91 1.32 1.82 2.36 2.8 3.18 -
B 0.24 0.5 0.86 1.29 1.72 2.22 2.65 3.18 -
C 0.24 0.49 0.81 1.17 1.6 2.02 2.5 2.94 3.18
D 0.24 0.5 0.83 1.2 1.66 2.1 2.6 3.18 -
The experiments show that, the second cable that is thick and single wired has the
worst current resistance. The thickness of this cable increased the current drawn
values. The rest of the cables have slight differences in electrical resistance. The best
choice is the first alternative cable with its multi wires. A second experiment is made
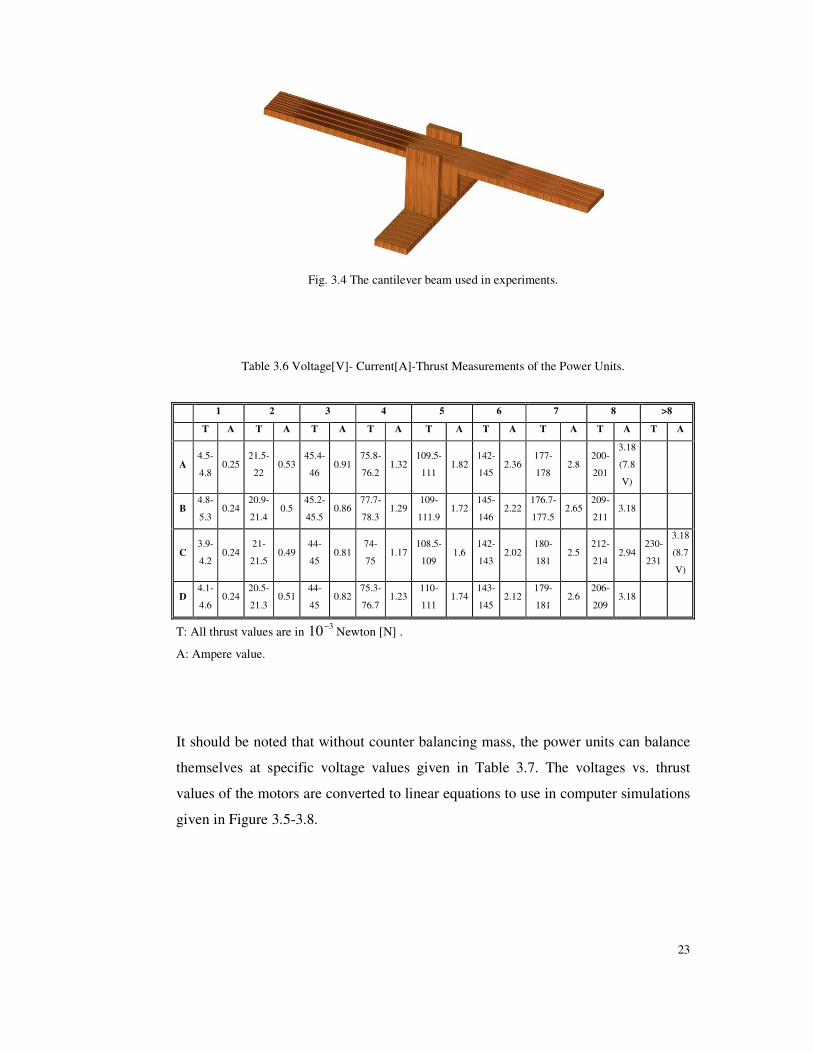
concerning on the thrust capability of the propellers and the motor performance. A
wooden cantilever beam test bed shown in Figure 3.4 is designed and manufactured
to measure the power unit’s thrust versus voltage data. A digital balancer is placed to
one side of cantilever beam and the motor assembly to the other side. According to
the given voltage, each motor generates some thrust force on the balancer. The
digital balancer is capable of measuring a maximum 500 g with a sensitivity of
miligram. Different thrust values are obtained from each power unit. These
divergences between the test results of the power units seem to be tunable. The
experiment results are given in Table 3.6.
23
Fig. 3.4 The cantilever beam used in experiments.
Table 3.6 Voltage[V]- Current[A]-Thrust Measurements of the Power Units.
1 2 3 4 5 6 7 8 >8
T A T A T A T A T A T A T A T A T A
A 4.5-
4.8 0.25
21.5-
22 0.53
45.4-
46 0.91
75.8-
76.2 1.32
109.5-
111 1.82
142-
145 2.36
177-
178 2.8
200-
201
3.18
(7.8
V)
B 4.8-
5.3 0.24
20.9-
21.4 0.5
45.2-
45.5 0.86
77.7-
78.3 1.29
109-
111.9 1.72
145-
146 2.22
176.7-
177.5 2.65
209-
211 3.18
C 3.9-
4.2 0.24
21-
21.5 0.49
44-
45 0.81
74-
75 1.17
108.5-
109 1.6
142-
143 2.02
180-
181 2.5
212-
214 2.94
230-
231
3.18
(8.7
V)
D 4.1-
4.6 0.24
20.5-
21.3 0.51
44-
45 0.82
75.3-
76.7 1.23
110-
111 1.74
143-
145 2.12
179-
181 2.6
206-
209 3.18
T: All thrust values are in 310− Newton [N] .
A: Ampere value.
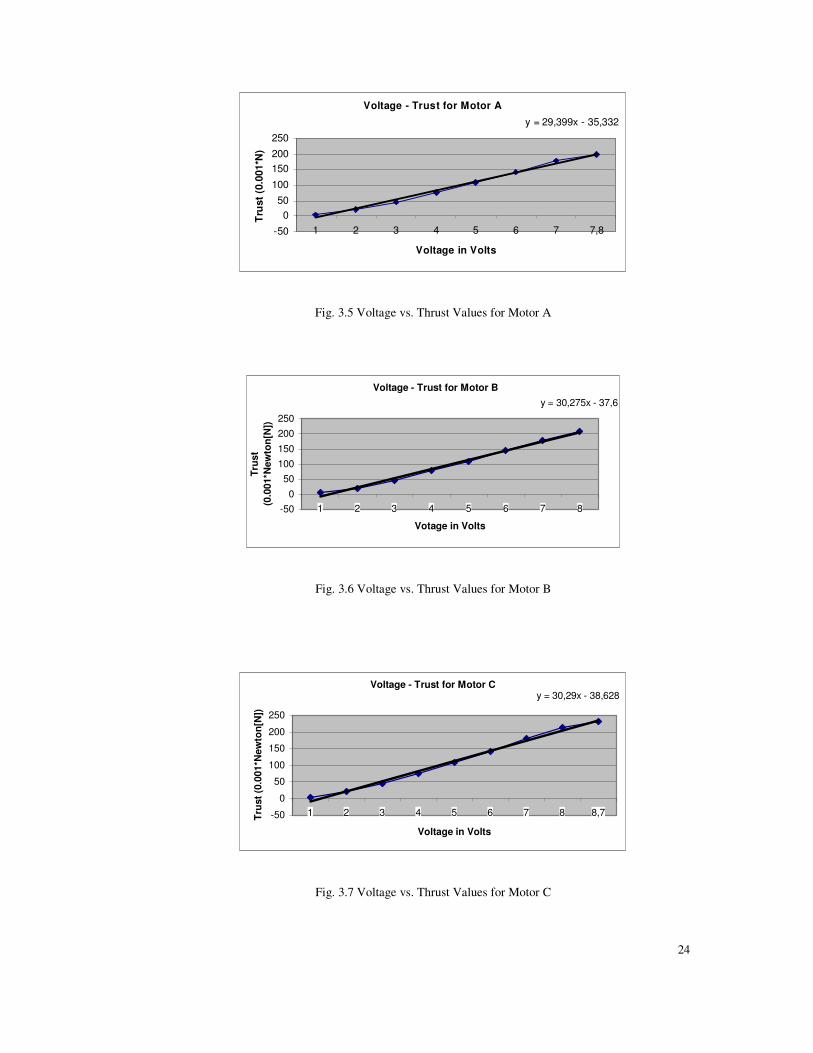
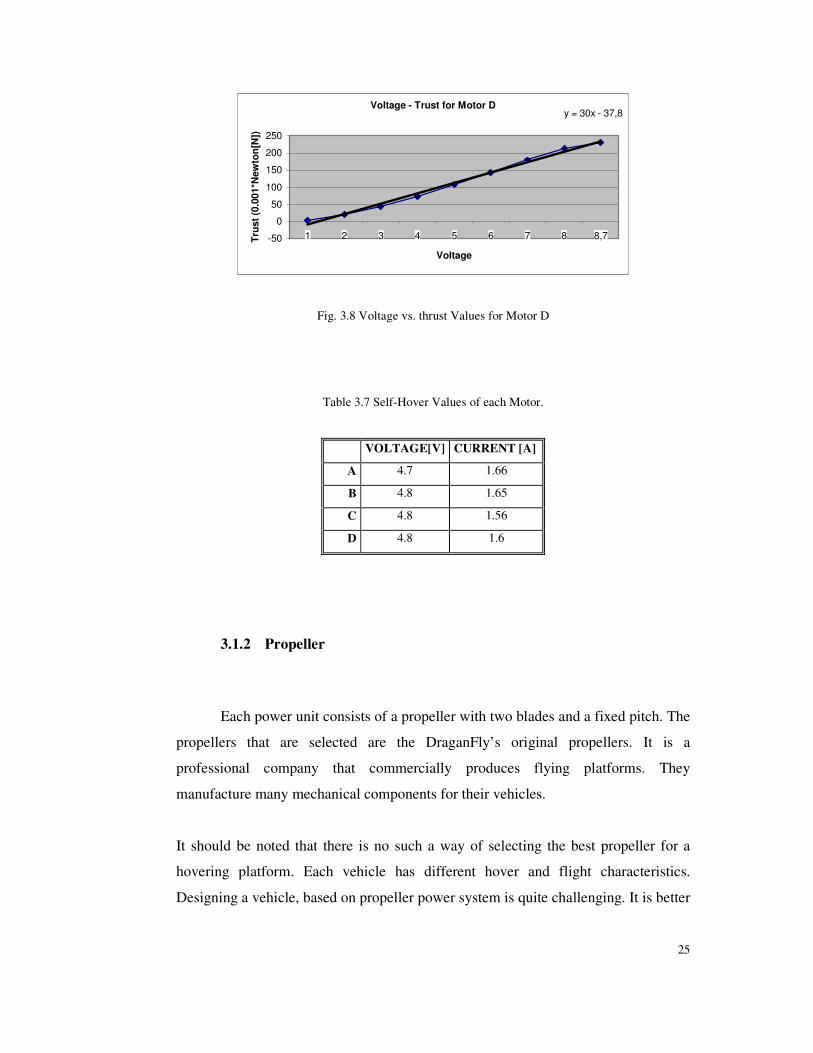
It should be noted that without counter balancing mass, the power units can balance
themselves at specific voltage values given in Table 3.7. The voltages vs. thrust
values of the motors are converted to linear equations to use in computer simulations
given in Figure 3.5-3.8.
24
Voltage - Trust for Motor A
y = 29,399x - 35,332
-50
050
100
150200250
1 2 3 4 5 6 7 7,8
Voltage in VoltsT
rust
(0.
001*
N)
Fig. 3.5 Voltage vs. Thrust Values for Motor A
Voltage - Trust for Motor By = 30,275x - 37,6
-500
50100150
200250
1 2 3 4 5 6 7 8
Votage in Volts
Trus
t (0
.001
*New
ton[
N])
Fig. 3.6 Voltage vs. Thrust Values for Motor B
Voltage - Trust for Motor Cy = 30,29x - 38,628
-50
0
50
100
150
200
250
1 2 3 4 5 6 7 8 8,7
Voltage in Volts
Trus
t (0.
001*
New
ton[
N])
Fig. 3.7 Voltage vs. Thrust Values for Motor C
25
Voltage - Trust for Motor Dy = 30x - 37,8
-50
0
50
100
150
200
250
1 2 3 4 5 6 7 8 8,7
VoltageTr
ust (
0.00
1*N
ewto
n[N
])
Fig. 3.8 Voltage vs. thrust Values for Motor D
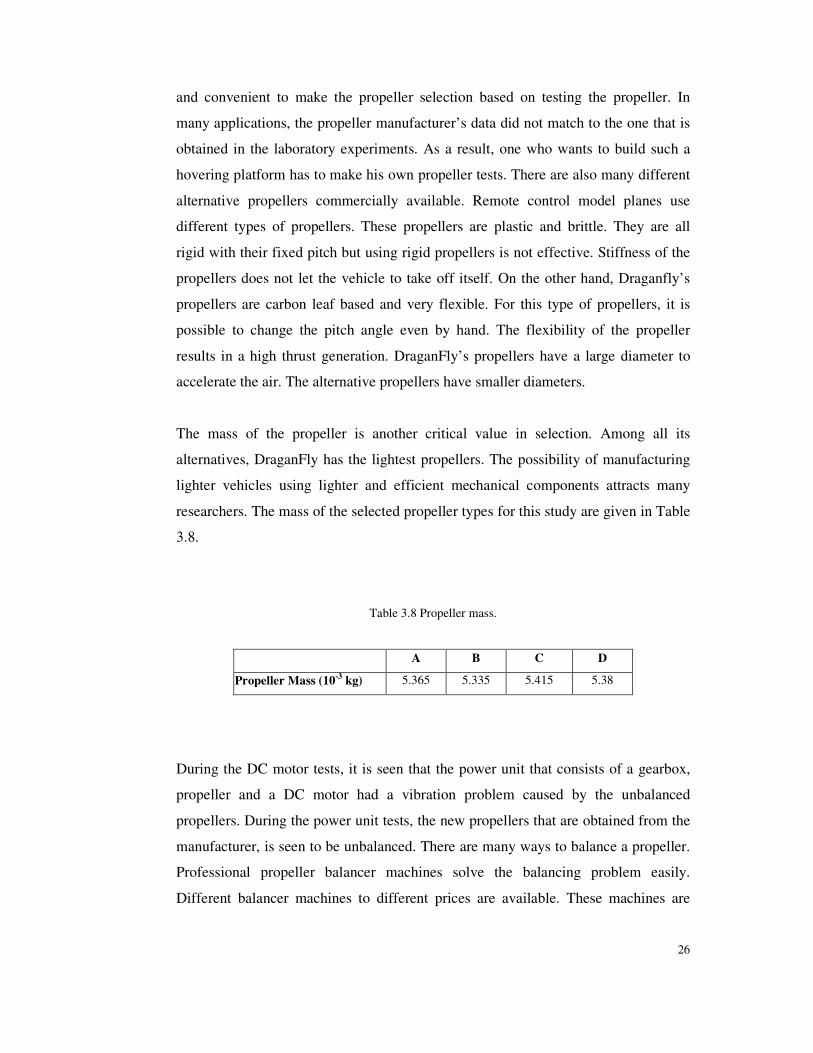
Table 3.7 Self-Hover Values of each Motor.
VOLTAGE[V] CURRENT [A]
A 4.7 1.66
B 4.8 1.65
C 4.8 1.56
D 4.8 1.6
3.1.2 Propeller
Each power unit consists of a propeller with two blades and a fixed pitch. The
propellers that are selected are the DraganFly’s original propellers. It is a
professional company that commercially produces flying platforms. They
manufacture many mechanical components for their vehicles.
It should be noted that there is no such a way of selecting the best propeller for a
hovering platform. Each vehicle has different hover and flight characteristics.
Designing a vehicle, based on propeller power system is quite challenging. It is better
26
and convenient to make the propeller selection based on testing the propeller. In
many applications, the propeller manufacturer’s data did not match to the one that is
obtained in the laboratory experiments. As a result, one who wants to build such a
hovering platform has to make his own propeller tests. There are also many different
alternative propellers commercially available. Remote control model planes use
different types of propellers. These propellers are plastic and brittle. They are all
rigid with their fixed pitch but using rigid propellers is not effective. Stiffness of the
propellers does not let the vehicle to take off itself. On the other hand, Draganfly’s
propellers are carbon leaf based and very flexible. For this type of propellers, it is
possible to change the pitch angle even by hand. The flexibility of the propeller
results in a high thrust generation. DraganFly’s propellers have a large diameter to
accelerate the air. The alternative propellers have smaller diameters.
The mass of the propeller is another critical value in selection. Among all its
alternatives, DraganFly has the lightest propellers. The possibility of manufacturing
lighter vehicles using lighter and efficient mechanical components attracts many
researchers. The mass of the selected propeller types for this study are given in Table
3.8.
Table 3.8 Propeller mass.
A B C D
Propeller Mass (10-3 kg) 5.365 5.335 5.415 5.38
During the DC motor tests, it is seen that the power unit that consists of a gearbox,
propeller and a DC motor had a vibration problem caused by the unbalanced
propellers. During the power unit tests, the new propellers that are obtained from the
manufacturer, is seen to be unbalanced. There are many ways to balance a propeller.
Professional propeller balancer machines solve the balancing problem easily.
Different balancer machines to different prices are available. These machines are

27
preferred to use in sensitive applications. In this study, there is no need to use a
balancer.
The balancing of the propellers is made by hand in this project. To balance the
propellers, axial moment generation due to mass of each blade has to be considered.
A needle is mounted on a mangle horizontally. It is convenient to model the propeller
axes as the x-axis lies along the right blade, y-axis lies along the centrifugal line and
the z-axis is directed upward. Each propeller is placed on the needle at their proposed
center of gravity where it is fastened to the DC motors.
The balancing of the propellers is nothing more then removing some particles over
the blade surface. The removing of the particles is made using emery paper. The
propeller is placed perpendicular to the needle and horizontal to the ground.
According to the heaviest blade, the propeller starts to rotate with respect to the
needle. It stops rotating when the moment generated by each blade is equal with
respect to the needle. This is a balancing technique according to the z-axis of the
propellers. When this step completed, another balancing has to be considered. Next is
the balancing according to the y-axis of the propeller. If a satisfactory equilibrium is
observed, it is possible to say that the propeller is balanced according to human eye.
More sensitive balance can be made, but the balancer machines have to be preferred.
One should keep in mind that while emerying such a blade; he has to pay attention
not to change the blade’s pitch angle. The pitch angle can be changed if emerying is
applied to the bottom of the propeller blade. As a summary, balancing the propeller
from its z-axis tells which blade has a mass additive and balancing the y-axis tells
which part of the blade you have to emery. Another important part is the attack angle
side of the propeller blades has to emeried, smoothly. This will affect the lifting
capability of the propellers.
28
3.1.3 Gear System
A gear module is used to accelerate the air efficiently in the vehicle. If no
gear module is used then power unit do not provide the required thrust force. It
should be noted that increasing the motor speed reduces the torque generated. To
accelerate the air particles over the propeller blades, one has to generate higher
torques rather than speed. The magnitude of the blade diameter is related to the
volume of air accelerated. Researchers examined that the best gear reduction ratio for
such a system to generate the required or the necessary torque is greater than 6.5:1.
[Nice, 2004] Using a greater ratio than 6.5:1 would provide slight higher efficiencies
to the vehicle. The gear system that is used in this study provides a 4.8:1
transmission ratio, which is sufficient for the purpose. The gear elements have plastic
material. The selected gear system has two components with a common module of
0.5 and teeth numbers of N1=10 and N2=48. In this project, the gear parts were
already available. It should be noted that, lower transmission ratio effects could be
eliminated by speeding up the DC motor.
The gress lubricant is applied to decrease the friction effect where it is strongly
related with the current drawn of the DC motors. When the gear, propeller and DC
motor system is assembled, the power unit is operated more than 10 days to decrease
that friction effect. At the end, smooth working and lower friction are observed.
3.1.4 Sensors
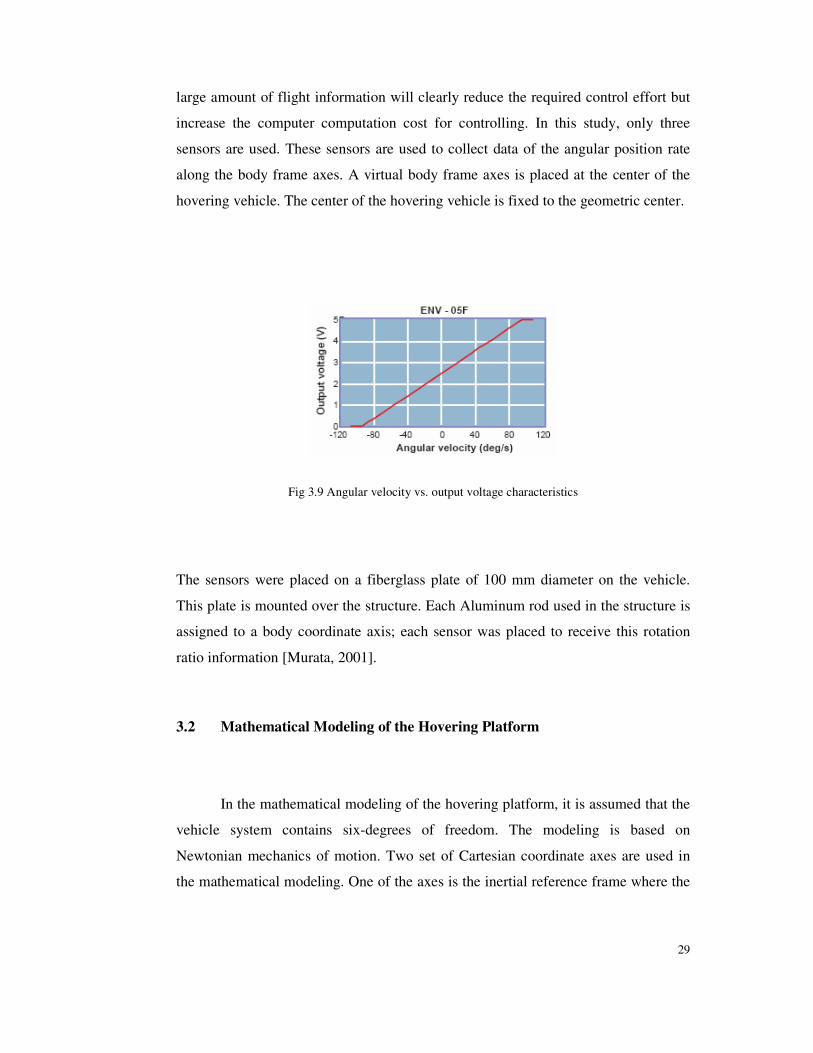
As an Inertial Measurement Unit (IMU), three gyroscopic sensors are used.
These are 241 Murata Env-05 F 03 sensors where the operating characteristic is
shown in Figure 3.9 [Technology Focus, 2002]. Different sensors are also available
to use on such a vehicle. It is clear that any information about the motion of the
vehicle is valuable while controlling such a vehicle. On the other hand, receiving
29
large amount of flight information will clearly reduce the required control effort but
increase the computer computation cost for controlling. In this study, only three
sensors are used. These sensors are used to collect data of the angular position rate
along the body frame axes. A virtual body frame axes is placed at the center of the
hovering vehicle. The center of the hovering vehicle is fixed to the geometric center.
Fig 3.9 Angular velocity vs. output voltage characteristics
The sensors were placed on a fiberglass plate of 100 mm diameter on the vehicle.
This plate is mounted over the structure. Each Aluminum rod used in the structure is
assigned to a body coordinate axis; each sensor was placed to receive this rotation
ratio information [Murata, 2001].
3.2 Mathematical Modeling of the Hovering Platform
In the mathematical modeling of the hovering platform, it is assumed that the
vehicle system contains six-degrees of freedom. The modeling is based on
Newtonian mechanics of motion. Two set of Cartesian coordinate axes are used in
the mathematical modeling. One of the axes is the inertial reference frame where the
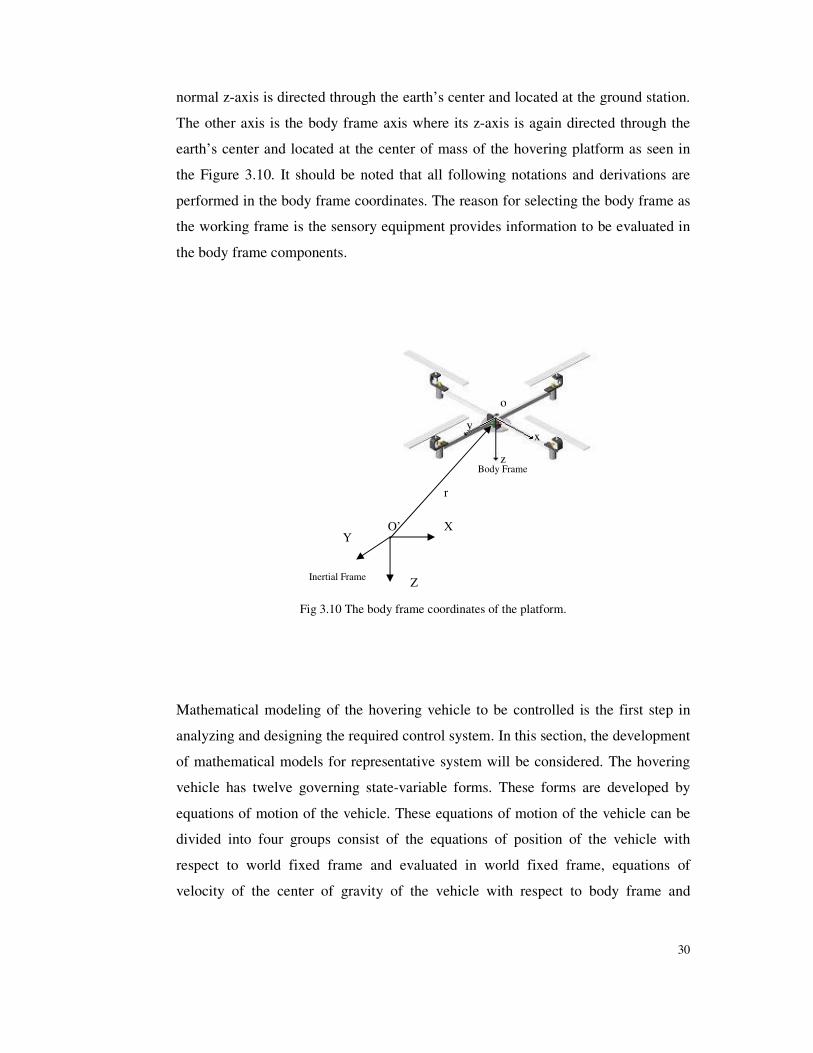
30
normal z-axis is directed through the earth’s center and located at the ground station.
The other axis is the body frame axis where its z-axis is again directed through the
earth’s center and located at the center of mass of the hovering platform as seen in
the Figure 3.10. It should be noted that all following notations and derivations are
performed in the body frame coordinates. The reason for selecting the body frame as
the working frame is the sensory equipment provides information to be evaluated in
the body frame components.
Fig 3.10 The body frame coordinates of the platform.
Mathematical modeling of the hovering vehicle to be controlled is the first step in
analyzing and designing the required control system. In this section, the development
of mathematical models for representative system will be considered. The hovering
vehicle has twelve governing state-variable forms. These forms are developed by
equations of motion of the vehicle. These equations of motion of the vehicle can be
divided into four groups consist of the equations of position of the vehicle with
respect to world fixed frame and evaluated in world fixed frame, equations of
velocity of the center of gravity of the vehicle with respect to body frame and
z
x y
X
Z
Y O’
o
r
Inertial Frame
Body Frame

31
evaluated in body frame, equations of motion of the angular velocity of the vehicle
about its principal axes with respect to body frame and evaluated in body frame and
the equations of angles of the vehicle with respect to body frame and evaluated in
body frame. Each group of equations represents the motion of the hovering vehicle
partially. Each group of equations consists of three state-variables that are the ( )kji���
,,
components of the related vectors namely the position, velocity, angular velocity and
the body frame angle. These differential equations can be expressed as a set of
simultaneous first-order differential equations and solved by a computer package
program. The solution of the state variables will be used in the controller design.
The first set of variables is the components of the position vector of the center of
mass of the vehicle with respect to world fixed inertial frame. The components of
position vector can be evaluated in terms of absolute velocity of the center of mass of
the platform with respect to world fixed inertial frame. The position vector of the
center of mass of the vehicle with respect to the inertial frame is defined as;
kzjyixr���� ++= (3.1)
which gives the absolute velocity vector as;
kzjyixr��
��
���� ++= (3.2)
Note that, in the equations “ �” represents the derivative with respect to time and yx ��,
and z� are the components of velocity along the x, y, z directions, respectively. The
components of the absolute velocity term in inertial frame can be written in body
frame with the form;
���
�
�
���
�
�
=���
�
�
���
�
�
w
v
u
R
z
y
x
IB
�
�
�
(3.3)

32
with u , v and w being the absolute velocity components in the body frame. BIR is
the rotation matrix from inertial frame to body frame components and can be given
by;
���
�
�
���
�
�
+−++−
−=
φθψφθψφψφφθψφθψφθψφψφφθψ
θψθψθ
coscossincossincossinsinsincossincossincossinsinsincoscossincossinsincos
sinsincoscoscos
BIR (3.4)
Note that, BIR has the following property
TBIBIIB RRR == −1
(3.5)
In the above equations, the angles represent the rotations around the three axes that
is;
φ : Roll Angle (phi) = Rotation about the body fixed x axis
θ : Pitch Angle (tetha) = Rotation about the body fixed y axis
ψ : Yaw Angle (psi) = Rotation about the body fixed z axis
The order of these angles is →→→ Θ ψφ toto . Using these definitions together
with equations (3.3), (3.4) and (3.5), it is possible to write;
( ) ( ) ( )wvux ψφφθψψφφθψψθ sinsincossincossincossinsincoscoscos ++−+=� (3.6)
( ) ( ) ( )wvuy ψφθψφψφθψφψθ sincossincossinsinsinsincoscossincos +−+++=� (3.7)
( ) ( ) ( )wvuz φθφθθ coscossincossin ++−=� (3.8)
In the derivations, vertical altitude can be expressed as zh −= where;
( ) ( ) ( )wvuh φθφθθ coscossincossin −−=� (3.9)
From the equations given in (3.6)-(3.8), it can be seen that the first set of variables
( )zyx ,, to be solved is the velocity component rates of the hovering platform.
33
Evaluating these variables give the coordinates of the hovering platform ( )zyx ,,
with respect to the inertial frame.
The second set of variables ( )wvu ,, are the velocity components of the hovering
platform with respect to inertial frame expressed in body frame. The difference
between the first set of variables and the second set of variables is the coordinate
axes of resolution. Three gyroscopes were used to sense the rotation rates about their
related axis on the body frame axes. Sensor data gives these velocity components
directly.
By using Newton’s equations of motion, one can write that
� = amF��
(3.10)
and
( ) ( )qwrvumqwrvmumX +−=+−+= �� (3.11)
( ) ( )pwruvmpwrumvmY −+=−+= �� (3.12)
( ) ( )pvquwmpvqumwmZ +−=+−+= �� (3.13)
where m is the mass of the hovering vehicle and X, Y and Z are the total external
force exerted on the center of mass of the body along the x, y, z direction of the body
frame, respectively. Rearranging the equations (3.11)-(3.13) and integrating the
gravity effect results as;
( )propulsionaero XXm
gqwrvu ++−−= 1sinθ� (3.14)
( )propulsionaero YYm
grupwv +++−= 1cossin θφ� (3.15)
( )propulsionaero ZZm
gpvquw +++−= 1coscos φθ� (3.16)

34
with note that, in the above equations, the terms p, q, r are the rate of rotation about
the x, y, z axis of the body fixed frame.
The third set of variables is the angular velocity components (p, q, r) of the hovering
platform with respect to inertial frame expressed in body frame. Sensor data
measures these velocity components in a noisy form.
By Euler’s equations of motion, it is possible to write that
wIH��
.=� (3.17)
and
���
���
�
=
333231
232221
131211
III
III
III
I (3.18)
where I is the inertia matrix. Rearranging the equation 3.17 results as
)()()()( 22231213332211 rqIrpqIpqrIrqIIpIL −+−+++−−= ��� (3.19)
)()()()( 231222
31113322 pqrIqrpIprIrpIIqIM −+++−+−−= ��� (3.20)
)()()()( 312322
12221133 qrpIrpqIqpIpqIIrIN −+++−+−−= ��� (3.21)
where L, M and N are the total net moment components exerted on the vehicle about
the x, y and z axes of the body frame. According to the assumptions given in the
previous chapter, the inertia matrix can be replaced with the principal inertia matrix.
Then the equations can be rewritten as;
rqIILpI )( 332211 −+=� (3.22)
rpIIMqI )( 113322 −+=� (3.23)
pqIINrI )( 221133 −+=� (3.24)

35
The fourth set of variables is the components of the angular position of the platform
with respect to inertial frame expressed in body frame. They can be evaluated in
terms of angular velocity of the platform as;
ωψθφ
IBL=���
�
�
���
�
�
�
�
�
(3.25)
where BIL is a rotation matrix from inertial frame to body frame components and
given as;
���
�
�
���
�
�
���
�
�
���
�
�
−
−=
���
�
�
���
�
�
ψθφ
φθφφθφ
θ
�
�
�
���� ����� ��BIL
Br
q
p
coscossin0sincoscos0
sin01 (3.26)
Then, it is possible to write the equations clearly as;
θφθφφ tancostansin rqp ++=� (3.27)
( ) ( )rq φφθ sincos −=� (3.28)
θφθφψ seccossecsin rq +=� (3.29)
Four sets of variables concerning the governing equations of the hovering platform
are derived. To use them in computer simulations, these equations have to be
transformed into the state equation representations. The summary of equations of
motion and their equivalent state equations are given below;
( ) ( ) ( )wvux ψφφθψψφφθψψθ sinsincossincossincossinsincoscoscos ++−+=� (3.30)
( ) ( )( ) 612sin10sin10cos11sin12cos
512sin10cos10sin11sin12cos412cos11cos1
xxxxxx
xxxxxxxxxx
+
+−+=� (3.31)

36
( ) ( ) ( )wvuy ψφθψφψφθψφψθ sincossincossinsinsinsincoscossincos +−+++=� (3.32) ( ) ( )
( ) 612sin10cos11sin12cos10sin
512sin10sin11sin12cos10cos412sin11cos2
xxxxxx
xxxxxxxxxx
+−
+++=� (3.33)
( ) ( ) ( )wvuzh φθφθθ coscossincossin −−=−= �� (3.34)
( ) ( ) ( ) 610cos11cos510sin11cos411sin3 xxxxxxxxx −−=� (3.35)
( )propulsionXaeroXm
qwrvu ++−−=1
sin.81,9 θ� (3.36)
( )propulsionXaeroXm
xxxxxx ++−−=1
11sin.81,968594� (3.37)
( )propulsionYaeroYm
pwruv ++++−=1
cossin.81,9 θφ� (3.38)
( )propulsionYaeroYm
xxxxxxx ++++−=1
11cos10sin.81,967495� (3.39)
( )propulsionZaeroZm
pvquw +++−=1
coscos.81,9 θφ� (3.40)
( )propulsionZaeroZm
xxxxxxx +++−=1
11cos10cos.81,957486� (3.41)
( ) 232
322
22333121131211 IrIqIIrqqpIrpILrIqIpI +−−−−+=++ ��� (3.42)
( ) 232
9322
822338931782179913812711 IxIxIIxxIxxIxxLxIxIxI +−−−−+=++ ��� (3.43)
( ) ( ) 231222
133311232221 pqIrqIprIIIprMrIqIpI +−−−−−=++ ��� (3.44)
( ) ( ) 238712892
72
913331197923822721 IxxIxxxxIIIxxMxIxIxI +−−−−−=++ ��� (3.45)
( ) ( )1122231322
21332331 IIpqprIqrIqpINrIqIpI −−−+−−=++ ��� (3.46)
( ) ( )112287239713982
82
721933823731 IIxxIxxIxxxxINxIxIxI −−−+−−=++ ��� (3.47)
θφθφφ tancostansin rqp ++=� (3.48)
11tan10cos911tan10sin8710 xxxxxxxx ++=� (3.49)
( ) ( )rq φφθ sincos −=� (3.50)

37
( ) ( ) 910sin810cos11 xxxxx −=� (3.51)
θφθφψ seccossecsin rq +=� (3.52)
11sec10cos911sec10sin812 xxxxxxx +=� (3.53)
In the above equations, the predetermined assumptions are applied. The mass
moment of inertia is in 2.mkg and found to be in AutoCad 2002 Mechanical Desktop
and evaluated in the body frame as;
���
���
�
=−
−
−
3
3
3
102.3000106.1000106.1
xx
x
I
It is assumed that there is no x or y directional forces exerted on the vehicle, except
some small disturbances occurred by the irregularities during manufacturing. The z
directional force is just the sum of the thrusts generated by each propeller.
�=
=
≅≅
4
1iiz
y
x
FF
0F0F
(3.54)
The given moment forces are the generated moments in the x and y axes. In this
study, the 1st and 3rd propellers rotate in clockwise and the other 2nd and 4th ones
rotates in the counter clockwise. All four DC motors generate axial moments. At the
mean while, each motor generates counter torques. These torques cannot be
eliminated.
( )( )
( )4321z
42y
31x
FFFF-CM
FFM
FFM
+−+=
−=−=
l
l
(3.55)

38
In the above equations, l is the bird eye moment arm length between the center of
mass of the vehicle and the propeller’s geometrical center. iF represents the thrust
force exerted by each power unit/propeller. All iF is in the vertical axis. iF values of
each motor are calculated for each power unit using the experiments mentioned
before. The resultant z-axis moment, zM , value can be estimated as given in the
equation (3.31). This estimation neglects the effect of DC motor modeling [Altu� E.,
Ostrowski J.P., Mahony R., 2003]. The coefficient C is a small number and
experimentally deduced. For the C value, 0.1, 0.01 and 0.001 values are tested in real
time experiments. It is decided to use C=0.1 at the end of these tests.
39
CHAPTER IV
CONTROLLER DESIGN
In this study, the goal is to stabilize the hovering vehicle in the air, with the
given inertial measurement units. To stabilize the vehicle, a control system has to be
considered. Without a control effort, irregularities and the working conditions of the
manufactured vehicle will cause unstable motions. Linear quadratic regulator (LQR)
controller is selected to stabilize the vehicle. On the other hand, LQR can only be
applied to a full rank observable system. To apply the LQR, the equations of motion
of the vehicle have to be represented in state-space form. A measurement noise
problem is detected and a second order transfer function with a low-pass filter is used
to solve the noise elimination problem. The following sections detail the theoretical
and experimental efforts and their comparison on the hovering vehicle.
4.1 Linear quadratic regulator
Linear quadratic regulator is one of the most effective and widely used
modern control technique, partially due to the ease of implementation and its
optimality to linear time invariant systems. It is an optimal and robust technique for
Multi Input Multi Output (MIMO) control. This method allows finding the optimal
control feedback coefficients that result in some balance between system errors and
control effort. This method simply drives the outputs to zero during the process.
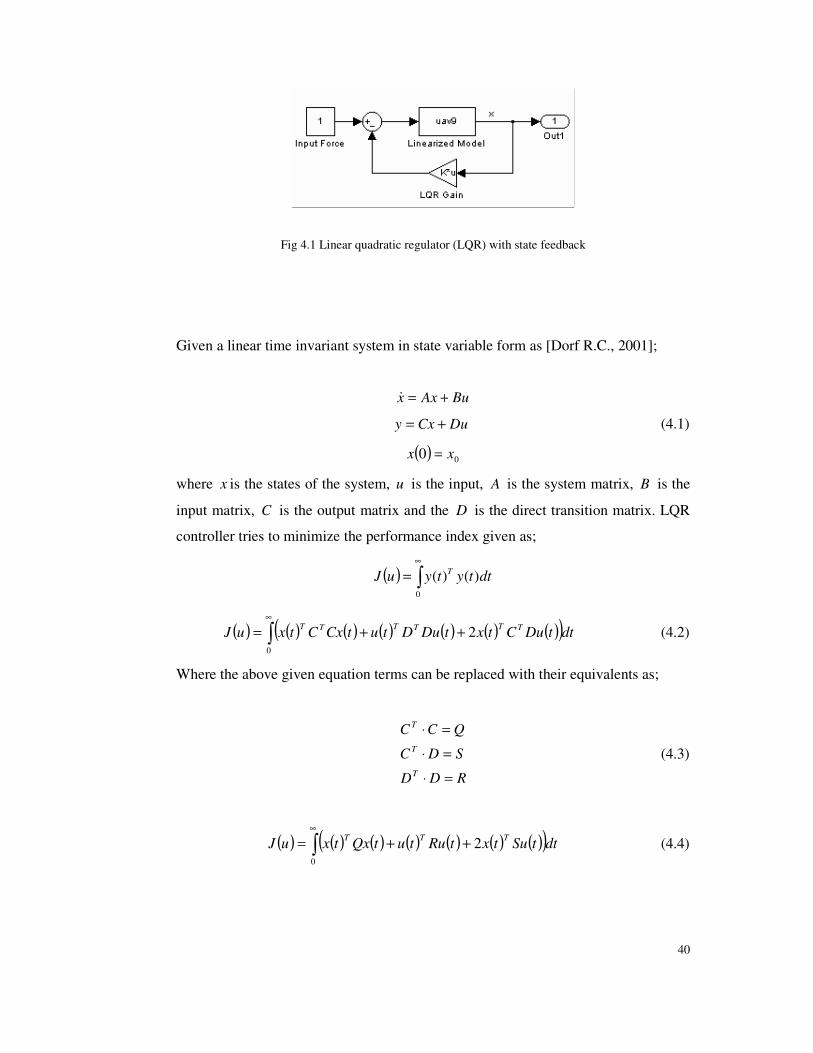
40
Fig 4.1 Linear quadratic regulator (LQR) with state feedback
Given a linear time invariant system in state variable form as [Dorf R.C., 2001];
BuAxx +=�
DuCxy += (4.1)
( ) 00 xx =
where x is the states of the system, u is the input, A is the system matrix, B is the
input matrix, C is the output matrix and the D is the direct transition matrix. LQR
controller tries to minimize the performance index given as;
( ) �∞
=0
)()( dttytyuJ T
( ) ( ) ( ) ( ) ( ) ( ) ( )( )�∞
++=0
2 dttDuCtxtDuDtutCxCtxuJ TTTTTT (4.2)
Where the above given equation terms can be replaced with their equivalents as;
RDD
SDC
QCC
T
T
T
=⋅
=⋅
=⋅
(4.3)
( ) ( ) ( ) ( ) ( ) ( ) ( )( )�∞
++=0
2 dttSutxtRututQxtxuJ TTT (4.4)

41
The linear solution that minimizes this index is given by some linear function of
states;
Kxu −= (4.5)
and the feedback gain is given as;
( )TT SPBRK +−= −1 (4.6)
Linear quadratic regulator solves also a Ricatti equation given as;
( ) ( ) 01 =+++−+ − QSPBRSPBPAPA TTT (4.7)
where P is the stabilizing solution to the Ricatti equation [Lewis F.L., 1999].
( ) ( ) 000
PxxdttytyJ TT == �∞
(4.8)
Linear quadratic regulator assumes that all the states are measurable and the system
is observable and linear. Non-linear equations of motion have to be linearized to use
the Linear quadratic regulator controller. In the above equation (4.3), Q is the state
control matrix and it is important when defining which states are more important and
which are less important. It means that, larger values of Q generally results in the
poles of the closed loop system being left in the s-plane so that the states decay faster
to zero. On the other hand, R is the performance index matrix also referred as the
cost of inputs. Experiments are used to get the fastest response depending on
different Q and R matrices [Hespanha J. P., 2004].
4.2 Linearization of the equations
When the equations of motion of the hovering vehicle are considered, it is
seen that the governing motion equations are non-linear. These equations have to be
linearized about the stable hovering conditions,
[ ]0 00 0000000000 =x , to represent the system in state-space
42
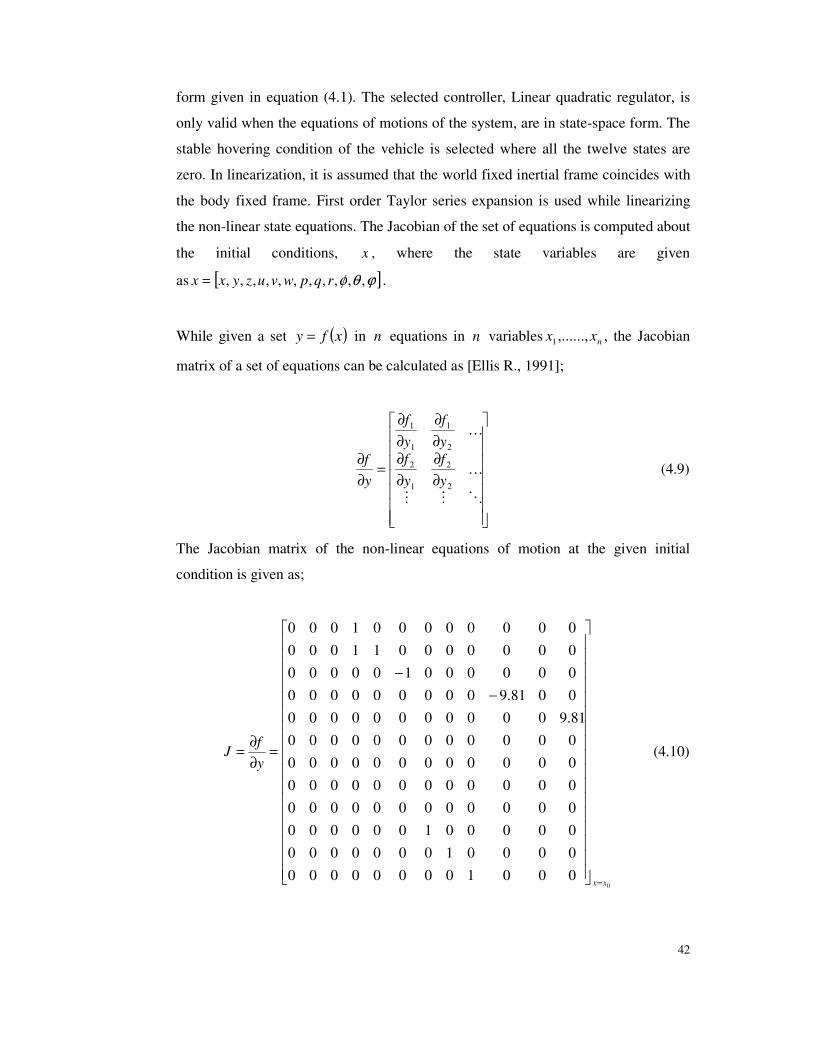
form given in equation (4.1). The selected controller, Linear quadratic regulator, is
only valid when the equations of motions of the system, are in state-space form. The
stable hovering condition of the vehicle is selected where all the twelve states are
zero. In linearization, it is assumed that the world fixed inertial frame coincides with
the body fixed frame. First order Taylor series expansion is used while linearizing
the non-linear state equations. The Jacobian of the set of equations is computed about
the initial conditions, x , where the state variables are given
as [ ]ϕθφ ,,,,,,,,,,, rqpwvuzyxx = .
While given a set ( )xfy = in n equations in n variables nxx ,......,1 , the Jacobian
matrix of a set of equations can be calculated as [Ellis R., 1991];
�������
�������
�
∂∂
∂∂
∂∂
∂∂
=∂∂
���
2
2
1
2
2
1
1
1
yf
yf
yf
yf
yf
(4.9)
The Jacobian matrix of the non-linear equations of motion at the given initial
condition is given as;
000010000000000001000000000000100000000000000000000000000000000000000000000000000000081.9000000000000081.9000000000000000100000000000011000000000001000
xx
yf
J
=�����������������
�����������������
�
−−
=∂∂= (4.10)

43
The jacobian matrix is the tool that is used while linearizing the non-linear motion
equations of the hovering vehicle. The J matrix, in equation (4.10) corresponds to
the system matrix, A , of the state-space representation of the equations of motion of
the hovering vehicle if the vector, y, is taken equal to the state variables vector, x, in
equation (4.9), while ( )xf is the state equations. The input matrix, B , of the state-
space representation is formed by the linearizing the inputs equations, u , simply
replacing the y vector with the input vector, u , in equation (4.9) while ( )xf is the
state equations. It is assumed that the vehicle is subjected to the resultant forces and
moments in body frame axis given below during working;
443322114321
4
1iiz
y
x
FFFFFF
0F0F
uzuzuzuz ⋅+⋅+⋅+⋅=+++==
≅≅
�=
(4.11)
where iz is the coefficient of conversion from Volts to thrust in Newtons. It should
be noted that, a special DC motor model is not used in this study and the related
coefficients, iz and C are selected as constant. The data sheet or any technical
information about the selected DC motor is not available while modeling. A proper
DC motor model based on real parameters could not be developed. The selected DC
motors are modeled empirically. The iz coefficients are deduced from the Volt vs.
thrust charts given in Chapter III. The moment equations can be summarized as;
( ) ( )( ) ( )
( ) ( )443322114321z
442242y
331131x
FFFF-CM
FFM
FFM
uzuzuzuzC
luzuzl
luzuzl
⋅+⋅−⋅+⋅−⋅=+−+⋅=
⋅⋅−⋅=⋅−=⋅⋅−⋅=⋅−=
(4.12)
where C is experimented to be equal to 0.1, l is the distance between the DC motor
and the center of gravity of the vehicle, the moment arm, and it is 0.25 m.

44
let input, ( )tu is given as;
( )����
����
�
=
4
3
2
1
u
u
u
u
tu (4.13)
Input matrix, B is formed using the Jacobian matrix tool as follows,
�����������������
�����������������
�
⋅⋅⋅⋅⋅⋅−
⋅⋅−=
000000000000
0000
00000000000000000000
4321
42
31
4321
zCzCzCzC
lzlz
lzlzmz
mz
mz
mz
B (4.14)
Three piezoelectric gyroscopes are located at the center of gravity of the vehicle to
have information about the motion of the vehicle on the body frame axis. The sensors
measure the set of angular velocity components, { }rqp ,, , which are also state
variables. This unique measurement, output of the three gyroscopes, will be used in
the controller design. The output matrix,C and direct transmission matrix, D , of the
state-space representation of the vehicle can differ based on output selection. The
direct transition matrix, D , is taken to be 0 because there is no direct coupling
between input and output of the system. On the other hand, the output matrix, C,
given in equation (4.15), consists of the measurement of three state variables by the
sensors. It is apparent that the only output of the system is the three angular velocity
states.
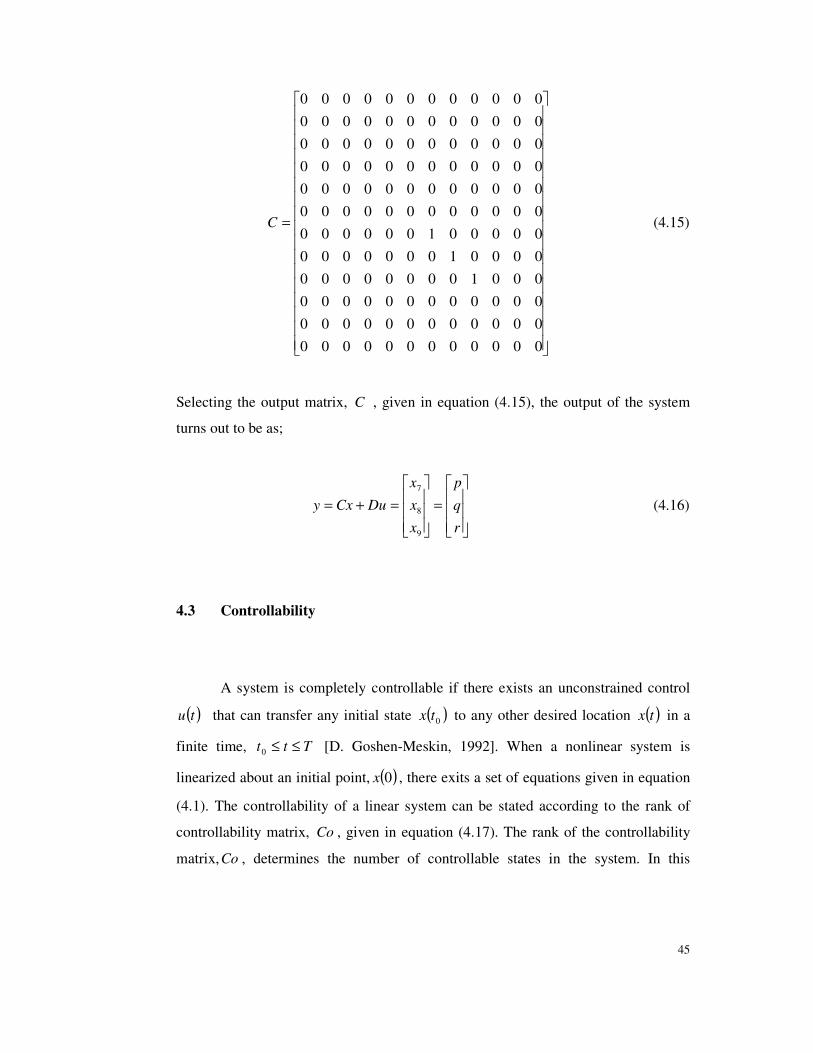
45
�����������������
�����������������
�
=
000000000000000000000000000000000000000100000000000010000000000001000000000000000000000000000000000000000000000000000000000000000000000000000000
C (4.15)
Selecting the output matrix, C , given in equation (4.15), the output of the system
turns out to be as;
���
���
�
=���
���
�
=+=r
q
p
x
x
x
DuCxy
9
8
7
(4.16)
4.3 Controllability
A system is completely controllable if there exists an unconstrained control
( )tu that can transfer any initial state ( )0tx to any other desired location ( )tx in a
finite time, Ttt ≤≤0 [D. Goshen-Meskin, 1992]. When a nonlinear system is
linearized about an initial point, ( )0x , there exits a set of equations given in equation
(4.1). The controllability of a linear system can be stated according to the rank of
controllability matrix, Co , given in equation (4.17). The rank of the controllability
matrix,Co , determines the number of controllable states in the system. In this
46
application, the number of states, n , and the controllability matrix is full rank. It
means that the system is completely state controllable.
[ ]BA.....BAABBCo )(n-12= (4.17)
where, A is the system matrix, B is the input matrix and n is the number of states.
Co matrix is given in Appendix II.
4.4 Observability
A system is said to be observable at time 0t if its state vector at time 0t , ( )0tx ,
can be determined from the output function [ ]10 ,tty where 1t , 10 tt ≤ is some finite time.
If this is true for all 0t and ( )0tx the system is said to be completely observable [D.
Goshen-Meskin, 1992]. For a given linear time invariant system, state space
representation is given in equation (4.1).
For a linear time invariant system to be completely state observable, the observability
matrix given in equation (4.18) must have a rank of n . Otherwise, the rank of
observability matrix indicates the number of states that are observable.
��������
��������
�
=
1
2
n-CA
.
.
CA
CA
C
O (4.18)
where, A is the system matrix, C is the output matrix and n is the number of states.
O matrix is given in Appendix II.
When the twelve non-linear state-variable equations of motion of the hovering
vehicle are linearized about the stable hovering conditions, 0x , and the state
47
equations are represented in state-space form, the state-space representation of the
equations of motions of the vehicle can be used to calculate the rank of the
observability matrix of the plant. The rank of the observability matrix of the hovering
platform dealt in this project is computed to be three (3). The rank of the
observability matrix is a measure of the number of states that are observed /
monitored. The hovering vehicle system is unobservable because the observability
matrix is not full rank. It is apparent that only the three states { }rqp ,, can be
observed by the three gyros. The rest of nine states could not be monitored.
If a state-variable is measured and fed back for use in control computations, the
system is called closed-loop or feedback control [Franklin G. F., 2002]. For a given
plant and state equations;
BuAxx +=� (4.19)
the objective is to find a state feedback control law as;
Kxu −= (4.20)
The selected controller for this application is the Linear quadratic regulator and its
feedback gain K is computed as given in equation (4.6). The gain matrix, K , is a
4x12 dimensional matrix. Computationally, such a gain, K , is possible to find for
twelve state-variables. To control and stabilize the overall plant with proper feedback
signal u , the 12x1 state vector, x has to be known, too. The state vector, x , has to
be numerically calculated as the feedback gain, K . These numerical values are the
sensor measurements of the system. Unfortunatelly, because there are only three
gyroscopic sensors, it is not possible to observe the twelve states as stated before.
Therefore, there are some numerically undetermined missing/unknown states-
variables in the hovering platform state vector, x .
When it is not possible to observe all the system states-variables by some inertial
measurement units or estimate somehow, an applicable Linear quadratic regulator
control signal,u , can not be used in the linear system as a controller. To able to use

48
the Linear quadratic regulator, a state estimator to observe all the twelve states will
be needed or controlling of observable states will be considered. A linear state
estimator cannot be used because the states are unobservable and the use of a non-
linear state estimator is not proposed to use in this study
On the other hand, the controlling of the observed states can be applied to the system
while considering the Linear quadratic regulator. By controlling of the observed
states, it is assumed that the system does not lose its original governing twelve states
but the Linear quadratic regulator feedback gain, K is applied to the observed states
rather than the total number of states. In this case, a 4x3 gain matrix K is
reconstructed for the observed states by the observed state-variable equations. If the
Linear quadratic regulator feedback gain coefficient is only computed considering
the observed states, the controlling and stabilizing of the observed states will be
possible. Only the observed rotational states-variables, p,q,r, are possible to control
[Chen M., Huzmezan M., 2003]. At the initial conditions, straightforward
mathematical relationships can be derived between the rotational rates and the
rotation angles. At the end, it should be clarified that, in this study, only the
controlling of the six states of rotation is achieved but the position and velocity
control of the hovering vehicle is not possible to control.
4.5 Noise Filtering
The three sensors provide information about the angular rotation rates of the
hovering vehicle. When the sensor measurements are corrupted by random
variations, it is possible to say that they are affected by noise. Since the standard
deviation is a measure of spread in data distribution, these random variations can be
characterized by the standard deviation of measured signals. It is possible to say that
when the standard deviation gets larger, the noise effect increases. [Opphenheim A.
V. 1999]
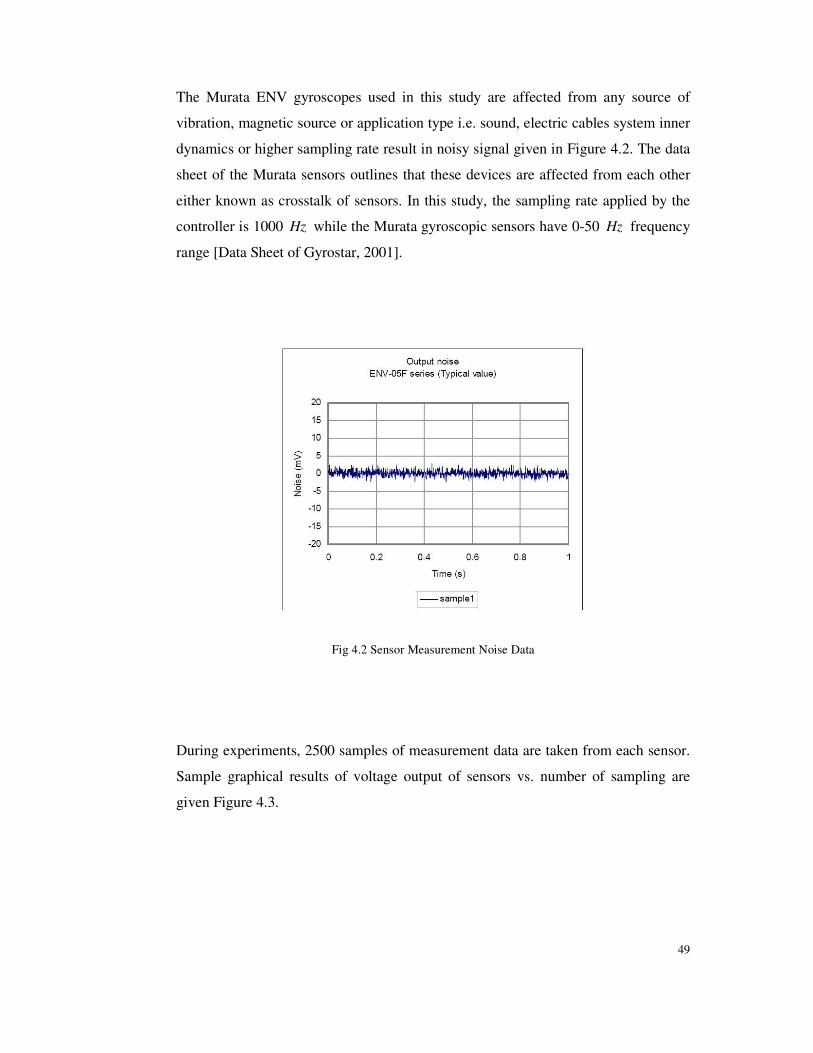
49
The Murata ENV gyroscopes used in this study are affected from any source of
vibration, magnetic source or application type i.e. sound, electric cables system inner
dynamics or higher sampling rate result in noisy signal given in Figure 4.2. The data
sheet of the Murata sensors outlines that these devices are affected from each other
either known as crosstalk of sensors. In this study, the sampling rate applied by the
controller is 1000 Hz while the Murata gyroscopic sensors have 0-50 Hz frequency
range [Data Sheet of Gyrostar, 2001].
Fig 4.2 Sensor Measurement Noise Data
During experiments, 2500 samples of measurement data are taken from each sensor.
Sample graphical results of voltage output of sensors vs. number of sampling are
given Figure 4.3.
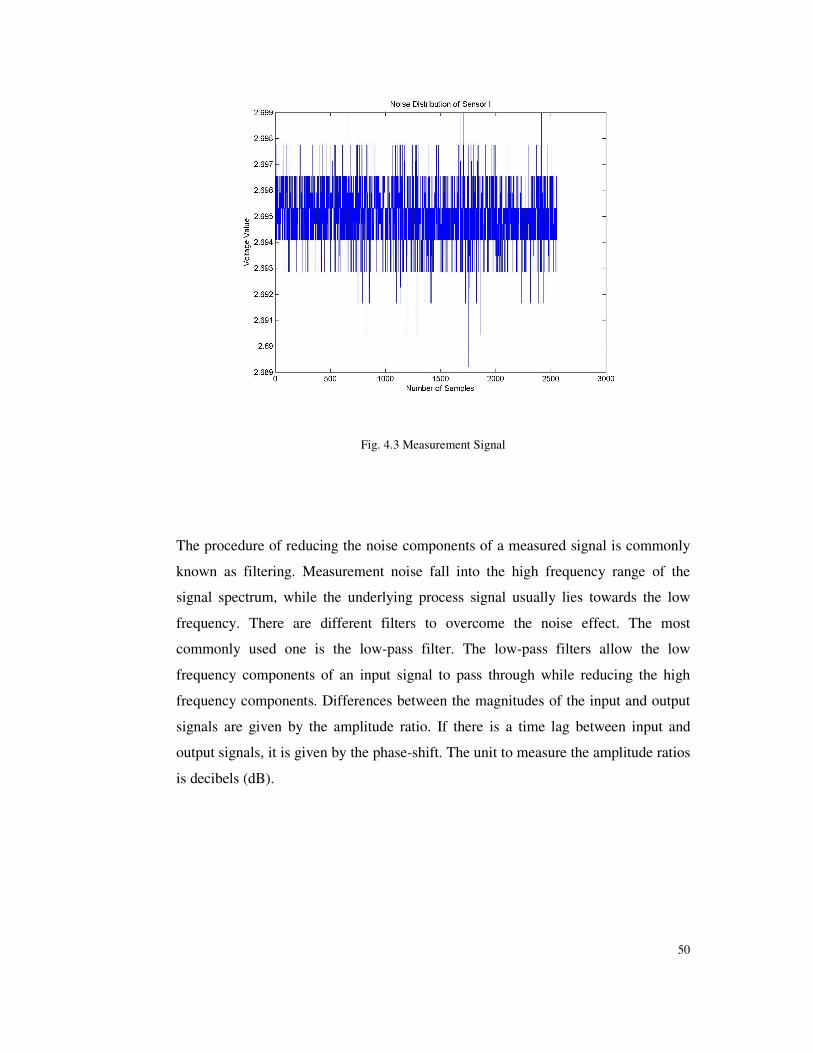
50
Fig. 4.3 Measurement Signal
The procedure of reducing the noise components of a measured signal is commonly
known as filtering. Measurement noise fall into the high frequency range of the
signal spectrum, while the underlying process signal usually lies towards the low
frequency. There are different filters to overcome the noise effect. The most
commonly used one is the low-pass filter. The low-pass filters allow the low
frequency components of an input signal to pass through while reducing the high
frequency components. Differences between the magnitudes of the input and output
signals are given by the amplitude ratio. If there is a time lag between input and
output signals, it is given by the phase-shift. The unit to measure the amplitude ratios
is decibels (dB).
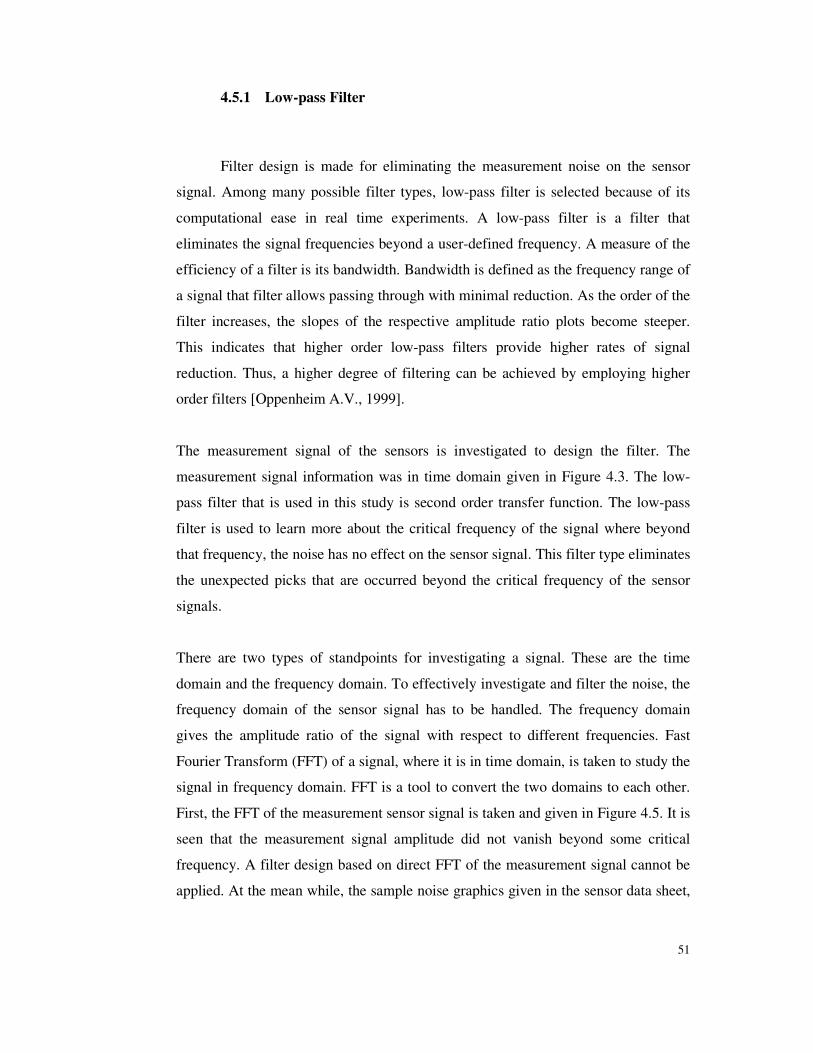
51
4.5.1 Low-pass Filter
Filter design is made for eliminating the measurement noise on the sensor
signal. Among many possible filter types, low-pass filter is selected because of its
computational ease in real time experiments. A low-pass filter is a filter that
eliminates the signal frequencies beyond a user-defined frequency. A measure of the
efficiency of a filter is its bandwidth. Bandwidth is defined as the frequency range of
a signal that filter allows passing through with minimal reduction. As the order of the
filter increases, the slopes of the respective amplitude ratio plots become steeper.
This indicates that higher order low-pass filters provide higher rates of signal
reduction. Thus, a higher degree of filtering can be achieved by employing higher
order filters [Oppenheim A.V., 1999].
The measurement signal of the sensors is investigated to design the filter. The
measurement signal information was in time domain given in Figure 4.3. The low-
pass filter that is used in this study is second order transfer function. The low-pass
filter is used to learn more about the critical frequency of the signal where beyond
that frequency, the noise has no effect on the sensor signal. This filter type eliminates
the unexpected picks that are occurred beyond the critical frequency of the sensor
signals.
There are two types of standpoints for investigating a signal. These are the time
domain and the frequency domain. To effectively investigate and filter the noise, the
frequency domain of the sensor signal has to be handled. The frequency domain
gives the amplitude ratio of the signal with respect to different frequencies. Fast
Fourier Transform (FFT) of a signal, where it is in time domain, is taken to study the
signal in frequency domain. FFT is a tool to convert the two domains to each other.
First, the FFT of the measurement sensor signal is taken and given in Figure 4.5. It is
seen that the measurement signal amplitude did not vanish beyond some critical
frequency. A filter design based on direct FFT of the measurement signal cannot be
applied. At the mean while, the sample noise graphics given in the sensor data sheet,
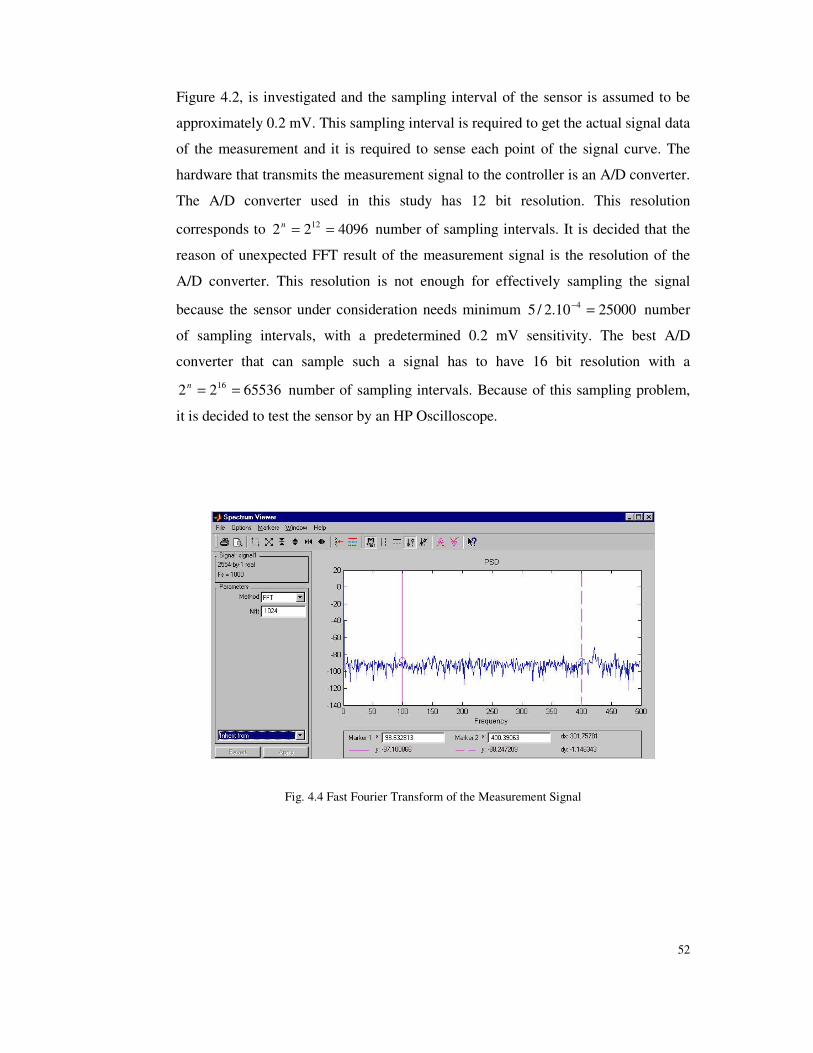
52
Figure 4.2, is investigated and the sampling interval of the sensor is assumed to be
approximately 0.2 mV. This sampling interval is required to get the actual signal data
of the measurement and it is required to sense each point of the signal curve. The
hardware that transmits the measurement signal to the controller is an A/D converter.
The A/D converter used in this study has 12 bit resolution. This resolution
corresponds to 409622 12 ==n number of sampling intervals. It is decided that the
reason of unexpected FFT result of the measurement signal is the resolution of the
A/D converter. This resolution is not enough for effectively sampling the signal
because the sensor under consideration needs minimum 2500010.2/5 4 =− number
of sampling intervals, with a predetermined 0.2 mV sensitivity. The best A/D
converter that can sample such a signal has to have 16 bit resolution with a
6553622 16 ==n number of sampling intervals. Because of this sampling problem,
it is decided to test the sensor by an HP Oscilloscope.
Fig. 4.4 Fast Fourier Transform of the Measurement Signal
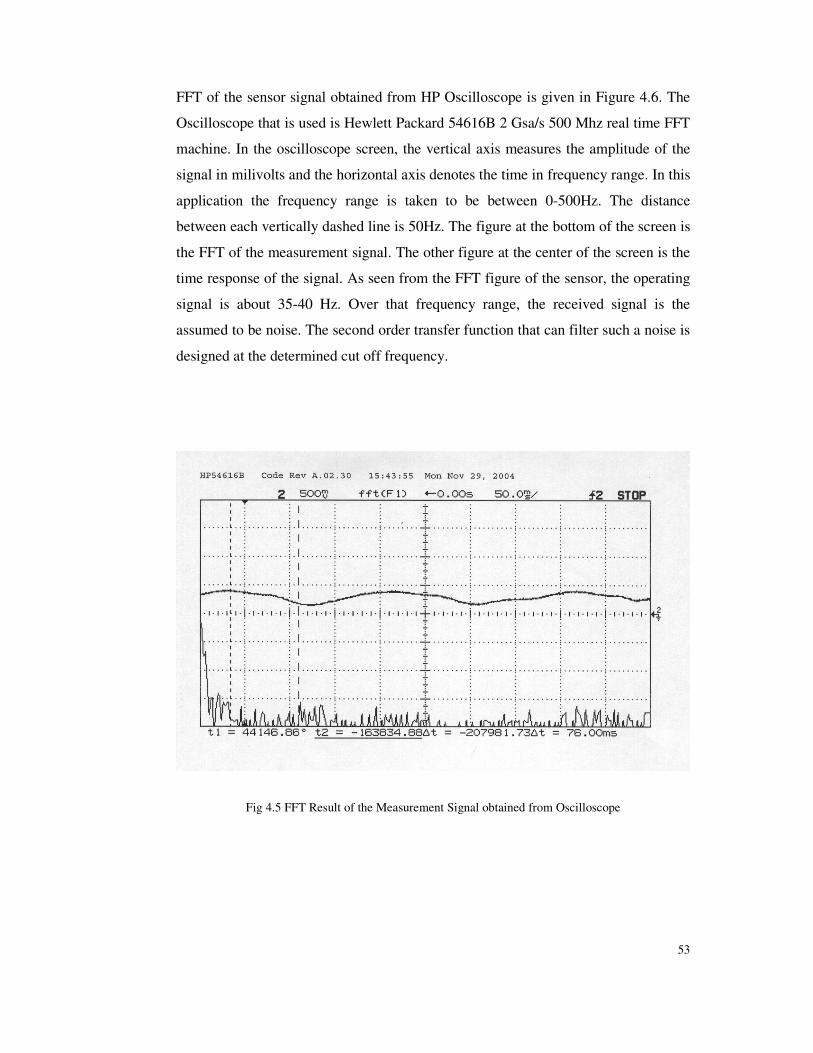
53
FFT of the sensor signal obtained from HP Oscilloscope is given in Figure 4.6. The
Oscilloscope that is used is Hewlett Packard 54616B 2 Gsa/s 500 Mhz real time FFT
machine. In the oscilloscope screen, the vertical axis measures the amplitude of the
signal in milivolts and the horizontal axis denotes the time in frequency range. In this
application the frequency range is taken to be between 0-500Hz. The distance
between each vertically dashed line is 50Hz. The figure at the bottom of the screen is
the FFT of the measurement signal. The other figure at the center of the screen is the
time response of the signal. As seen from the FFT figure of the sensor, the operating
signal is about 35-40 Hz. Over that frequency range, the received signal is the
assumed to be noise. The second order transfer function that can filter such a noise is
designed at the determined cut off frequency.
Fig 4.5 FFT Result of the Measurement Signal obtained from Oscilloscope

54
The frequency domain of the signal has shown that the signal is inefficient beyond
the 35-40 Hz frequency range. To effectively drive the DC motors and to filter the
measurement signal, a second order regular transfer function given in equation
(4.19), with a predetermined cut-off frequency of 35 Hz is applied to the model. The
used sensors have an operating frequency of 50Hz. The expected filtering frequency
could not exceed 50 Hz because of this reason. The damping ratio of the transfer
function is taken to be 0.6 and it is calculated from equation (4.20). IN equation
(4.20), the nw is taken to be 35 Hz as the operating point of the signal and Bw is the
band limit and it is 40 Hz. Thus damping ratio is taken to be 0.6. The cut-off
frequency and the bandwidth of the transfer function are approximately calculated by
the equation (4.20) [Dorf R. C., Bishop R. H., 2001].
The second order transfer function that is used is
( ) ( )( )
( )( ) ( )22
2
22
2
3523526.02352
2 ⋅⋅+⋅⋅⋅⋅⋅+⋅⋅=
+⋅⋅⋅+=
πππ
ξ sswsws
wsG
nn
n (4.19)
8.03.0 where 85.119.1 ≤≤+−≈ ξξn
B
ww
(4.20)
The second order transfer function has a frequency characteristics that is given in the
bode plot of equation (4.19) shown in Figure 4.7.
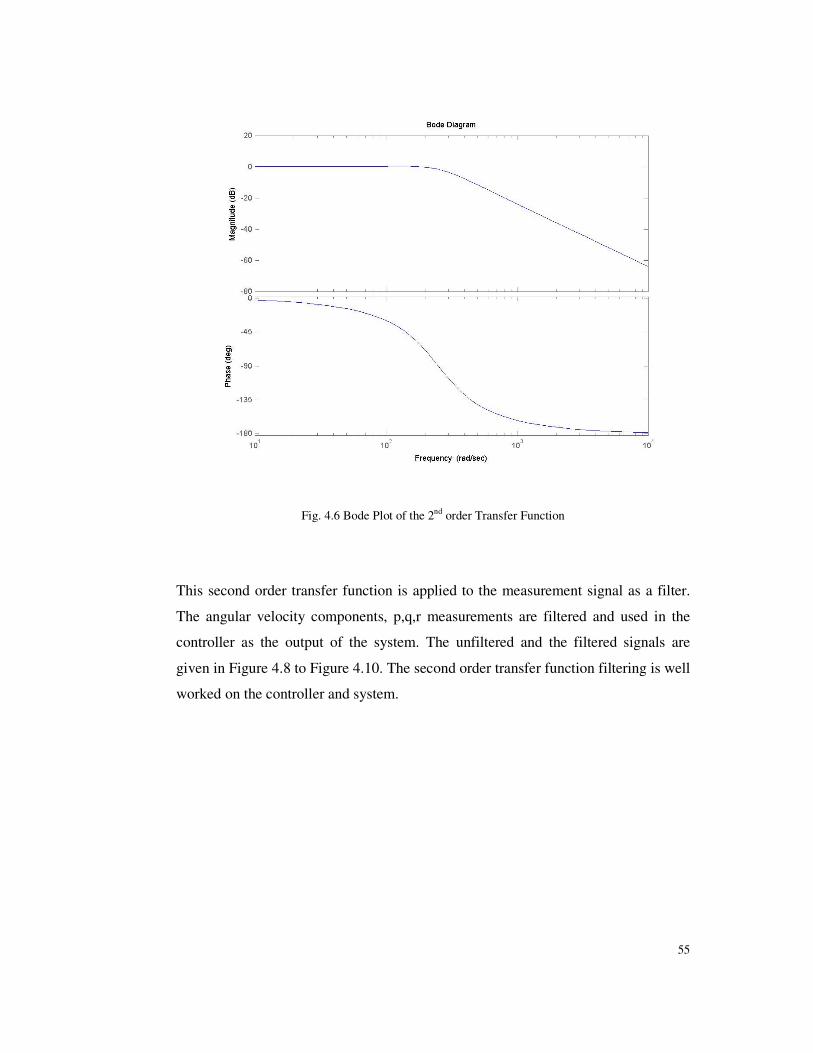
55
Fig. 4.6 Bode Plot of the 2nd order Transfer Function
This second order transfer function is applied to the measurement signal as a filter.
The angular velocity components, p,q,r measurements are filtered and used in the
controller as the output of the system. The unfiltered and the filtered signals are
given in Figure 4.8 to Figure 4.10. The second order transfer function filtering is well
worked on the controller and system.
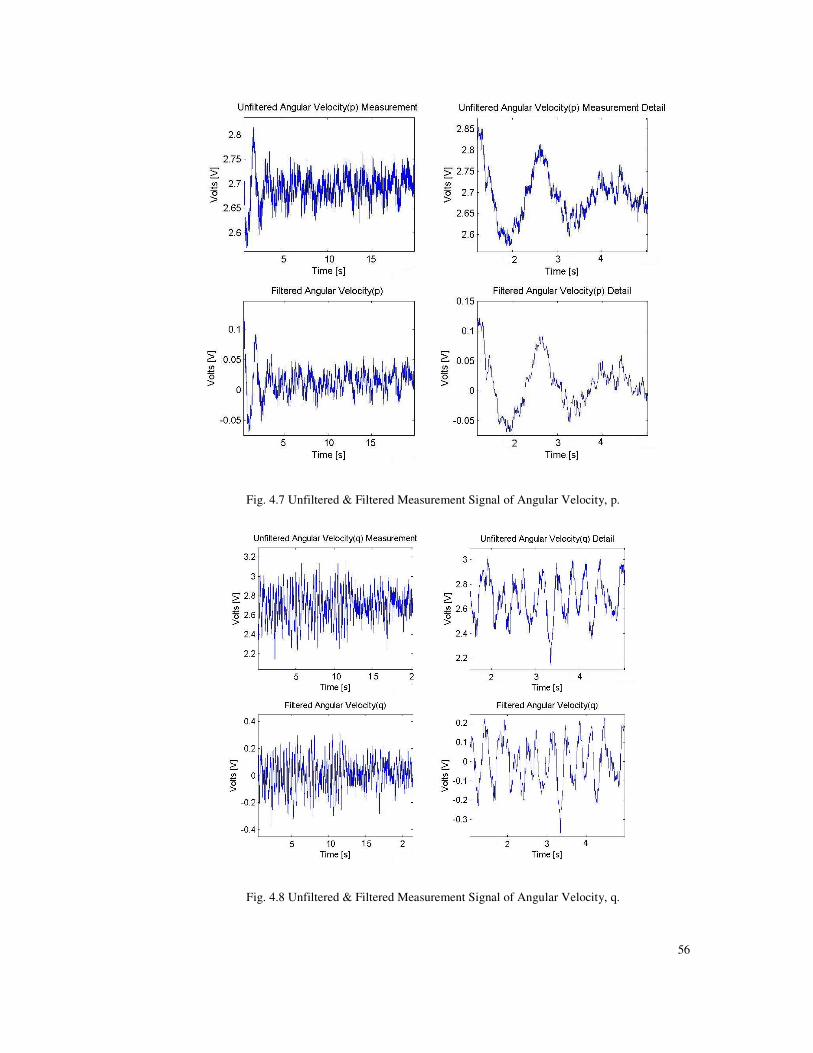
56
Fig. 4.7 Unfiltered & Filtered Measurement Signal of Angular Velocity, p.
Fig. 4.8 Unfiltered & Filtered Measurement Signal of Angular Velocity, q.
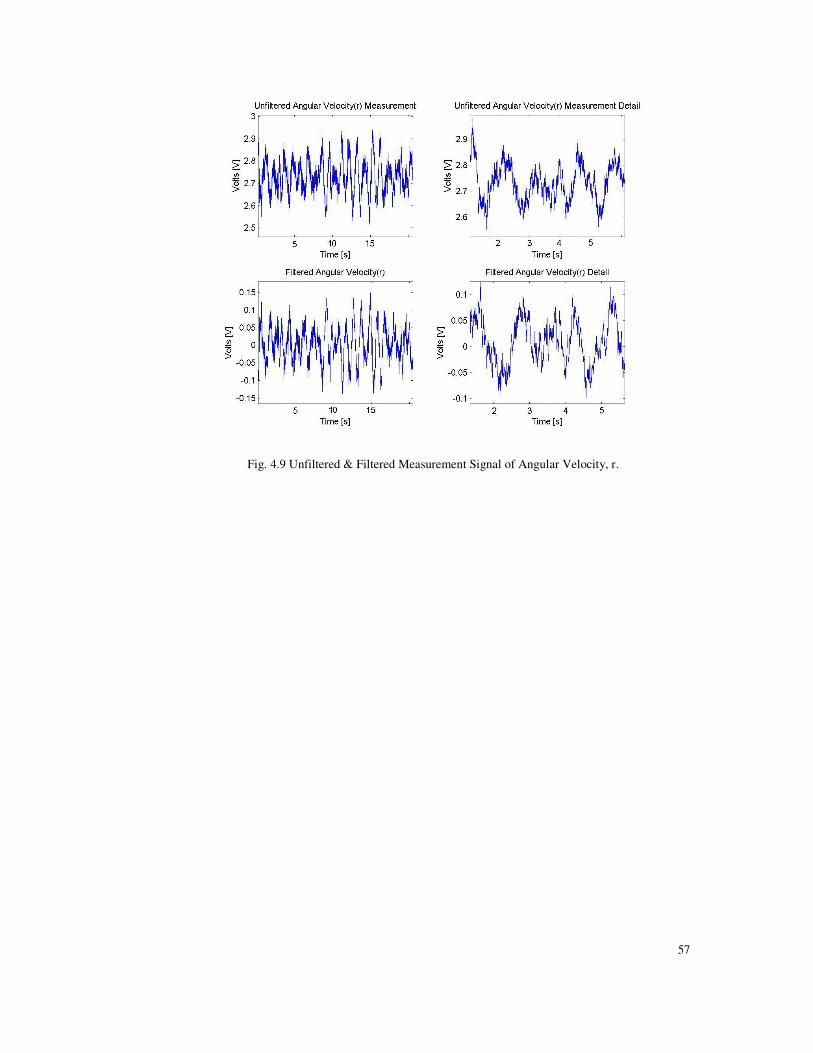
57
Fig. 4.9 Unfiltered & Filtered Measurement Signal of Angular Velocity, r.
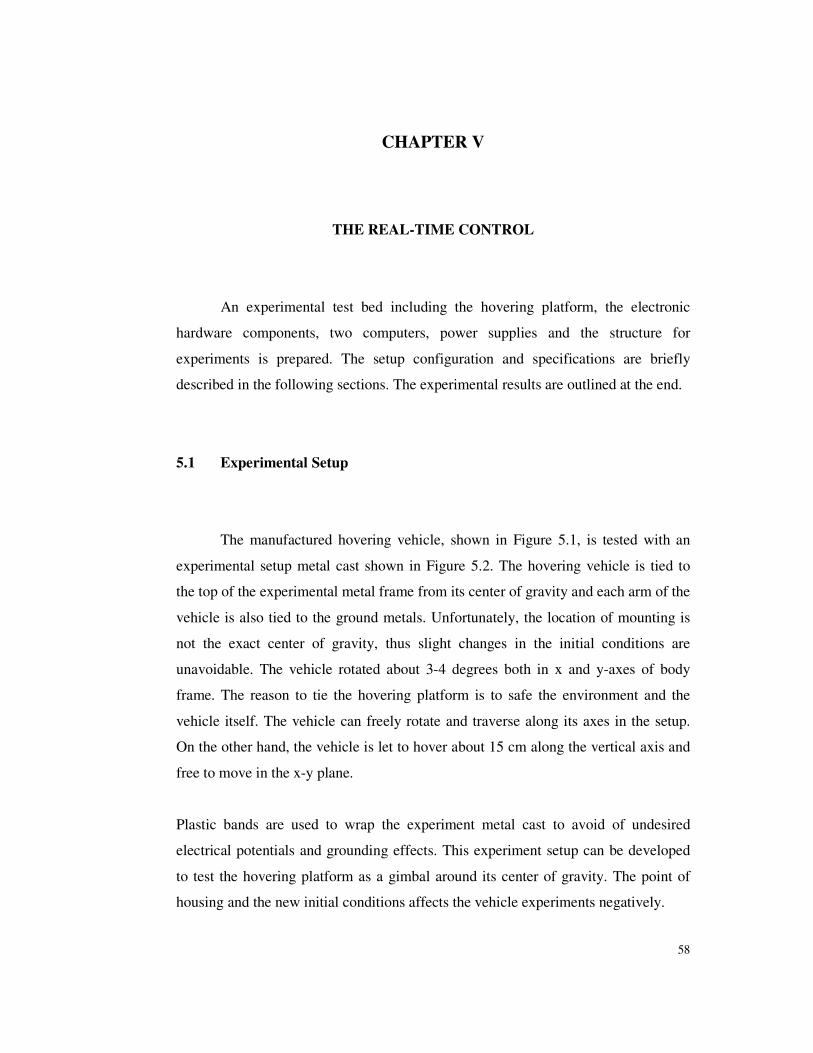
58
CHAPTER V
THE REAL-TIME CONTROL
An experimental test bed including the hovering platform, the electronic
hardware components, two computers, power supplies and the structure for
experiments is prepared. The setup configuration and specifications are briefly
described in the following sections. The experimental results are outlined at the end.
5.1 Experimental Setup
The manufactured hovering vehicle, shown in Figure 5.1, is tested with an
experimental setup metal cast shown in Figure 5.2. The hovering vehicle is tied to
the top of the experimental metal frame from its center of gravity and each arm of the
vehicle is also tied to the ground metals. Unfortunately, the location of mounting is
not the exact center of gravity, thus slight changes in the initial conditions are
unavoidable. The vehicle rotated about 3-4 degrees both in x and y-axes of body
frame. The reason to tie the hovering platform is to safe the environment and the
vehicle itself. The vehicle can freely rotate and traverse along its axes in the setup.
On the other hand, the vehicle is let to hover about 15 cm along the vertical axis and
free to move in the x-y plane.
Plastic bands are used to wrap the experiment metal cast to avoid of undesired
electrical potentials and grounding effects. This experiment setup can be developed
to test the hovering platform as a gimbal around its center of gravity. The point of
housing and the new initial conditions affects the vehicle experiments negatively.

59
Fig 5.1 The Manufactured Vehicle
Fig 5.2 The Experimental Setup Metal Cast
5.2 Computer System
The proposed controller software for the hovering platform is Matlab 6.5 /
Simulink package program. The Real Time Windows Target PC module of Simulink
is a common application in such external control experiments. While working with
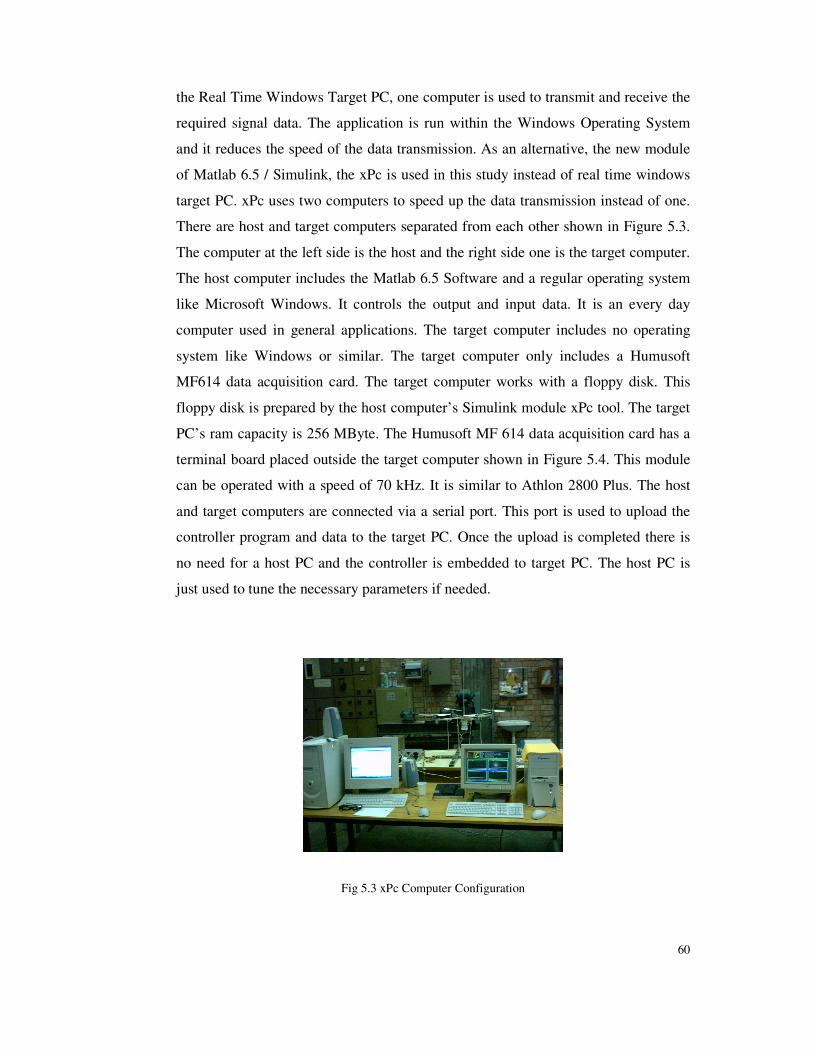
60
the Real Time Windows Target PC, one computer is used to transmit and receive the
required signal data. The application is run within the Windows Operating System
and it reduces the speed of the data transmission. As an alternative, the new module
of Matlab 6.5 / Simulink, the xPc is used in this study instead of real time windows
target PC. xPc uses two computers to speed up the data transmission instead of one.
There are host and target computers separated from each other shown in Figure 5.3.
The computer at the left side is the host and the right side one is the target computer.
The host computer includes the Matlab 6.5 Software and a regular operating system
like Microsoft Windows. It controls the output and input data. It is an every day
computer used in general applications. The target computer includes no operating
system like Windows or similar. The target computer only includes a Humusoft
MF614 data acquisition card. The target computer works with a floppy disk. This
floppy disk is prepared by the host computer’s Simulink module xPc tool. The target
PC’s ram capacity is 256 MByte. The Humusoft MF 614 data acquisition card has a
terminal board placed outside the target computer shown in Figure 5.4. This module
can be operated with a speed of 70 kHz. It is similar to Athlon 2800 Plus. The host
and target computers are connected via a serial port. This port is used to upload the
controller program and data to the target PC. Once the upload is completed there is
no need for a host PC and the controller is embedded to target PC. The host PC is
just used to tune the necessary parameters if needed.
Fig 5.3 xPc Computer Configuration
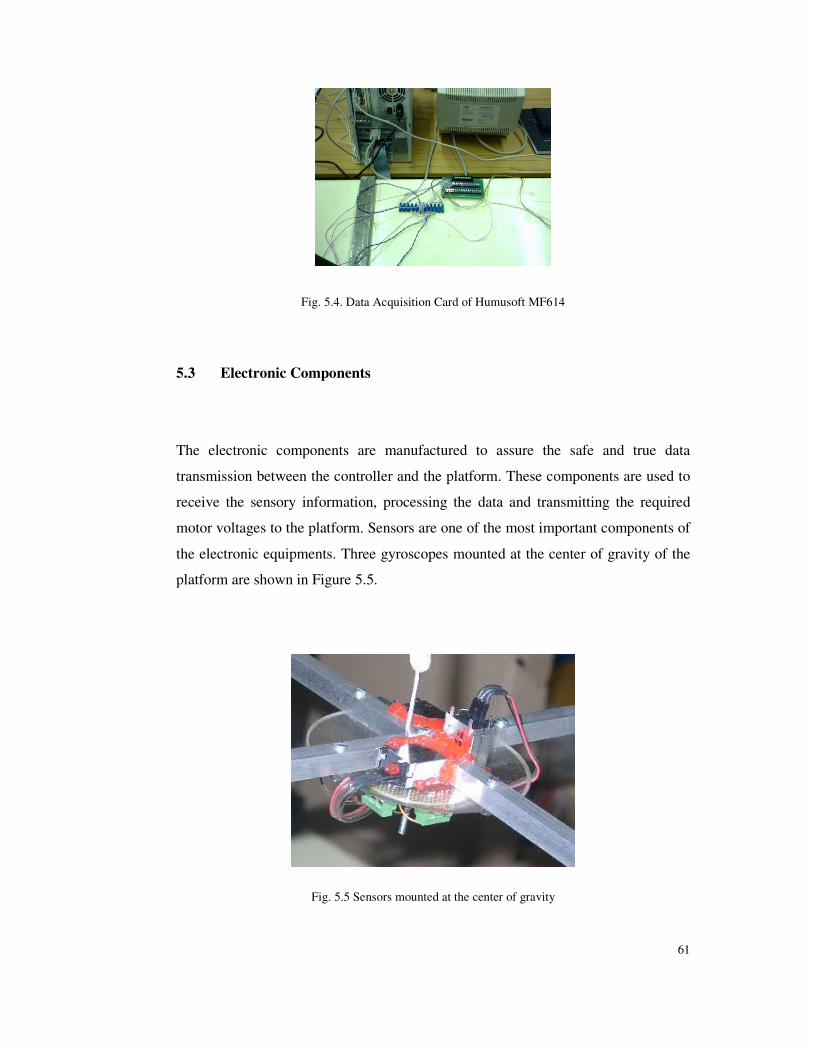
61
Fig. 5.4. Data Acquisition Card of Humusoft MF614
5.3 Electronic Components
The electronic components are manufactured to assure the safe and true data
transmission between the controller and the platform. These components are used to
receive the sensory information, processing the data and transmitting the required
motor voltages to the platform. Sensors are one of the most important components of
the electronic equipments. Three gyroscopes mounted at the center of gravity of the
platform are shown in Figure 5.5.
Fig. 5.5 Sensors mounted at the center of gravity
62
The gyroscopes used are Murata ENV-05F-03 model. The sensors works in the
frequency range of 0-50 Hz. The speed of the sensors is enough for such hovering
vehicle applications. These sensors have three terminals to supply the required
reference voltage, grounding and sensor output. The sensors provide the system with
analog output in Volts. This voltage is received by an Analog to Digital Converter
(A/D). The collected data have to be converted into digital values because the
computers are not operating with an analog input. The A/D converter transmits this
digital signal to the Humusoft MF 614 Data Acquisition Card and this card transmits
the signal to the target PC. The grounding of the sensors and the PIC cards must be
different from the DC motor grounds. Otherwise the sensors can be affected with a
high measurement noise. The gyroscopes provide the axial rotation rates. The sensor
measurements are in voltage. The sensors provide voltage between 0-5 Volts. The
reference output of the sensor is about 2.5 Volts and it means no measurement of
sensor is available and zero angular velocity. When the vehicle rotates in positive
direction, the sensor provides more than 2.5 Volts. On the other hand, if the vehicle
rotates in negative direction, the sensor provides less than 2.5 Volts. This reference
voltage can drift while working. In this study, the reference voltage has changed
during experiments. If it is needed the sensor drift model has to be included to the
control system. Drift model means how the reference voltage of the sensors is
changing during applications. Modeling this drift can differ according to
applications. In this application, reference voltage tuning is made to get accurate
references. The tuning is made according to sample data received from the sensors.
The controller embedded target PC transmits a voltage output to each DC motor to
control the vehicle. These voltage signals are digital in computer environment and
transmitted via a Data Acquisition Card. The Data Acquisition Card transmits these
voltage signals to PIC cards. These PIC cards convert the digital signals to analog
and output a Pulse Width Module (PWM) signal for motor drivers. The computer
generates voltage signals between 0-5 Volts for the DC motors. PIC cards transform
this voltage into the range 0-12 Volts. PIC cards have 10 bit channels. The PIC cards
used in the study are shown in Figure 5.6. A module for this transmission conversion
is also added to the control Simulink model.
63
Fig 5.6 PIC Cards
Two PIC cards are used to control four DC motors. Each PIC card controls two DC
motors. DC motors receive these PWM signals through motor drivers. There are four
motor drivers used for each DC motor shown in fig 5.7. This PWM signals are 10 bit
integer signals. The reason to select PWM signals generators are high efficiency and
high current capacity. The motor drivers are compound of optic isolation, mosfet
driver and mosfet power transmitter. The motor drivers are connected to 12 V DC
motor power supply. This power supply is different from the computer supply. The
DC motor grounds are also different than the other components’ electrical grounds.
The overall structure of electronic hardware is given in Figure 5.8.
Fig 5.7 Motor Drivers
64
Fig 5.8 Electronic Hardware Flow Chart
5.4 Experiments
5.4.1 Motor Testing
Testing the DC motors starts the experiments on the hovering vehicle. Each
motor is given a reference signal by computer and their output is observed. The
results are satisfactory for the DC motors. The PIC cards and motors drivers are
tested. The PIC cards generate PWM signal by 4.5 kHz. Meanwhile, it is seen that
electric cables has to be selected among the high resistance ones. To avoid of high
voltage loss, the electronic hardware components have to be placed nearby to each
other. The off-control tests are made to deduce if the system could generate the
necessary thrust to lift itself. An experimental control Simulink model is designed
and voltage to rad/s conversion for the motor models is included. The Simulink
model is shown in the right side of Figure 5.8. Without receiving any information
from the sensors, the platform generates the required thrust for hovering. The
average voltage value for the hovering is about 6.4-6.6 V. The sensors connected to
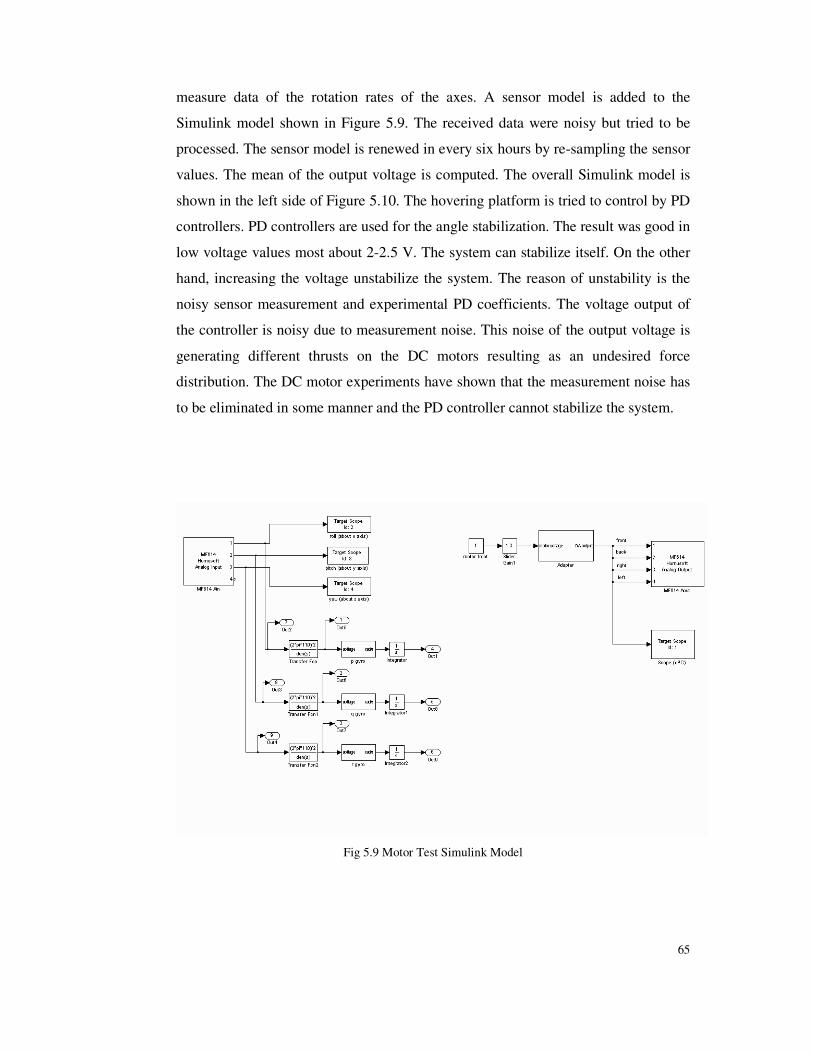
65
measure data of the rotation rates of the axes. A sensor model is added to the
Simulink model shown in Figure 5.9. The received data were noisy but tried to be
processed. The sensor model is renewed in every six hours by re-sampling the sensor
values. The mean of the output voltage is computed. The overall Simulink model is
shown in the left side of Figure 5.10. The hovering platform is tried to control by PD
controllers. PD controllers are used for the angle stabilization. The result was good in
low voltage values most about 2-2.5 V. The system can stabilize itself. On the other
hand, increasing the voltage unstabilize the system. The reason of unstability is the
noisy sensor measurement and experimental PD coefficients. The voltage output of
the controller is noisy due to measurement noise. This noise of the output voltage is
generating different thrusts on the DC motors resulting as an undesired force
distribution. The DC motor experiments have shown that the measurement noise has
to be eliminated in some manner and the PD controller cannot stabilize the system.
Fig 5.9 Motor Test Simulink Model
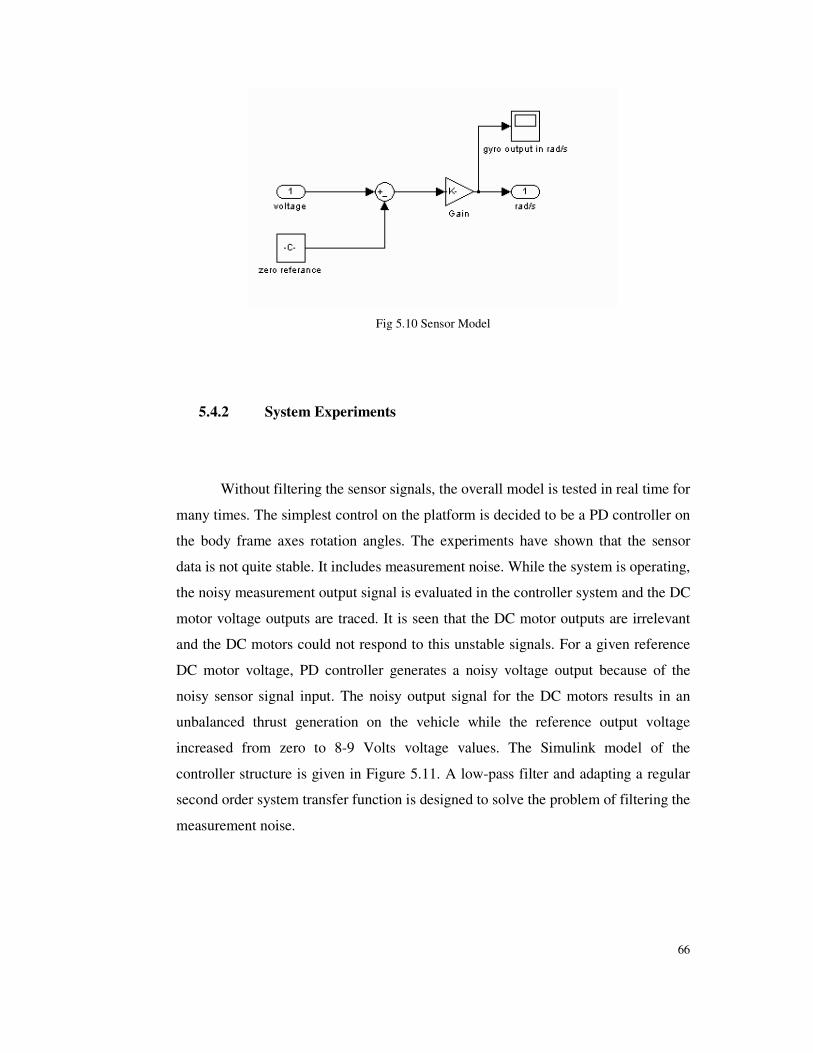
66
Fig 5.10 Sensor Model
5.4.2 System Experiments
Without filtering the sensor signals, the overall model is tested in real time for
many times. The simplest control on the platform is decided to be a PD controller on
the body frame axes rotation angles. The experiments have shown that the sensor
data is not quite stable. It includes measurement noise. While the system is operating,
the noisy measurement output signal is evaluated in the controller system and the DC
motor voltage outputs are traced. It is seen that the DC motor outputs are irrelevant
and the DC motors could not respond to this unstable signals. For a given reference
DC motor voltage, PD controller generates a noisy voltage output because of the
noisy sensor signal input. The noisy output signal for the DC motors results in an
unbalanced thrust generation on the vehicle while the reference output voltage
increased from zero to 8-9 Volts voltage values. The Simulink model of the
controller structure is given in Figure 5.11. A low-pass filter and adapting a regular
second order system transfer function is designed to solve the problem of filtering the
measurement noise.
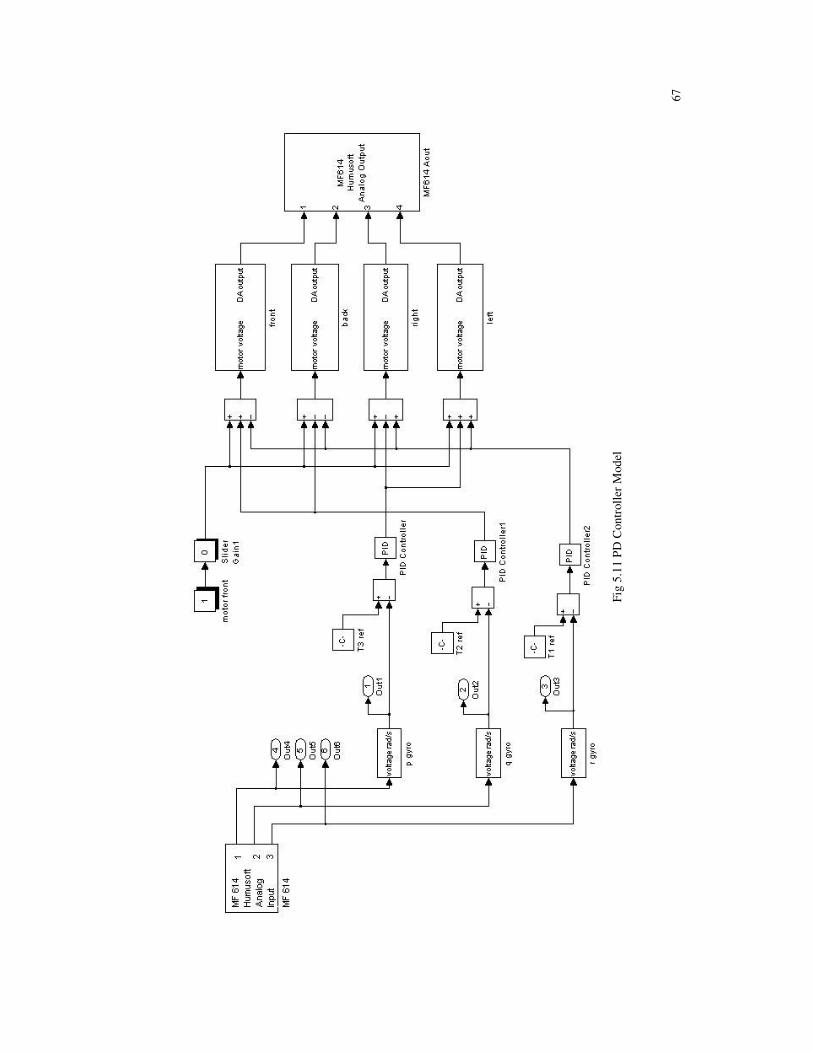
67
Fi
g 5.
11 P
D C
ontr
olle
r M
odel
68
In experiments, the deduction of the PD controller coefficients is more depended on
experimental methods. It is noticed that it is difficult to design the PD controller
coefficients by experimental methods because of the six-degree of freedom nature of
the vehicle. It is seen that before stabilizing the system, adopting a PD controller is
not sufficient to control the vehicle motion. As proposed in the previous chapters,
Linear quadratic regulator controller design is implemented to the system in this
level. The Linear quadratic regulator gain coefficient, K, is found by computer
simulations. The coefficients of Linear quadratic regulator are designed to minimize
the system’s rotation rate values, to make the angular velocity components zero. As
stated before, no control attempt is made on linear velocities and positions of the
hovering platform with respect to body frame axes. Only the rotational rates and
rotation angles are controlled. It is known that the vehicle is only observable in three
axes rotation rates. The DC motor model is needed to deduce the torque generated by
each motor. It is not possible to construct a DC motor model that can be used when
experimenting and simulating such a system because no parameter of the DC motor
was available. The resultant torque on the platform can be estimated as
( )4231. FFFFCM z ++−−= . [Altu� E., Ostrowski J.P., Mahony R., 2003]. The
coefficient C can vary and calculated experimentally. During the experiments, the
C coefficient that best describes the hovering platform is equal to 0.1. According to
torque model, the Linear quadratic regulator gain, K , is a 3x4 matrix for three states-
variables ( )rqp ,, and four voltage inputs ( )4321 ,,, uuuu . For the small displacements
about the center of gravity, it can be assumed that the angular velocity rates are the
direct derivates of their related angles. During the experiments, the initial condition
considered for the vehicle describes the stand-alone position and it is where the states
vector is 0�
. It is proposed that the Linear quadratic regulator would stabilize the
hovering platform about the initial conditions with respect to body frame axes. If
Linear quadratic regulator can stabilize the vehicle in the air, applying a PD
controller can control the desired states of angles. The angles have derivative
relationship with their rates at the initial conditions. This relationship is simplified by
direct integrating the rotation rate angular velocity. PD controller stabilizes the
vehicle at the given initial conditions.
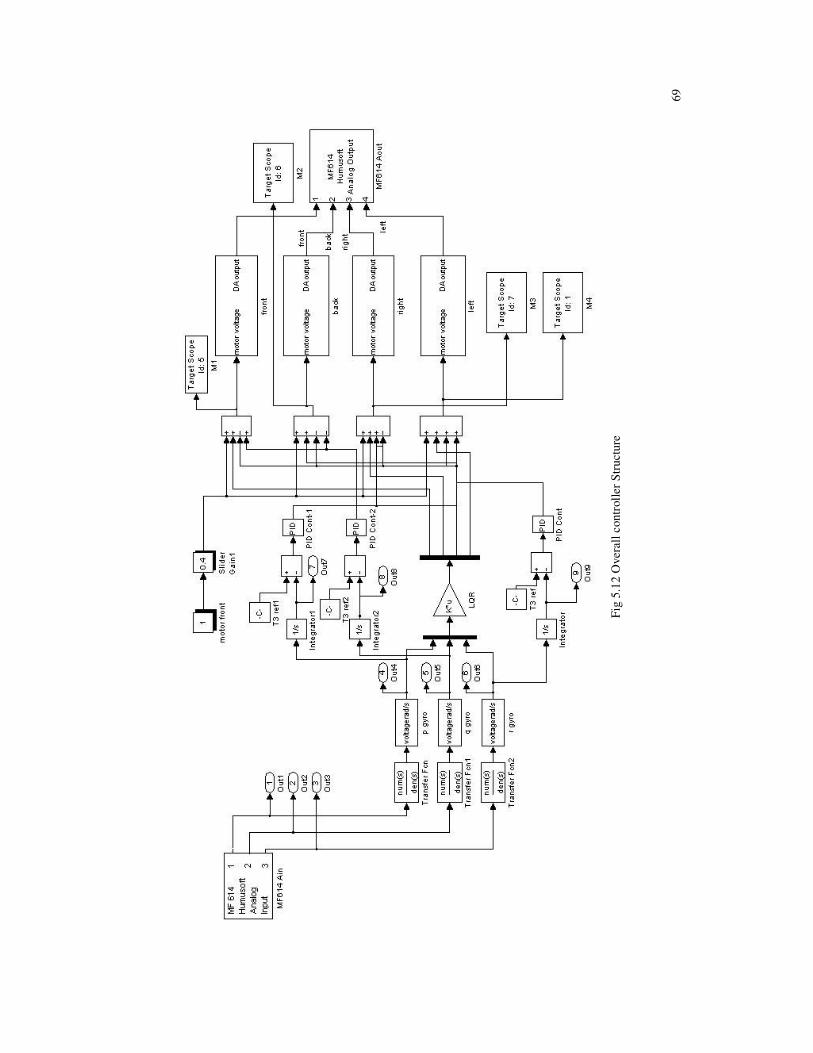
69
Fi
g 5.
12 O
vera
ll co
ntro
ller S
truc
ture

70
5.4.3 Sample Application
For a sample application, the sensor drift is re-measured. The mean voltage
values of the sensor models are tuned. With the state equations of linear vehicle
model, the Linear quadratic regulator gain coefficients are calculated and given in
equation 5.1. Following the tuning of parameters and construction of the controller
model, the system is run to stabilize itself in the air. PD controller applied to control
the yaw, pitch and roll angles, respectively. Integral control, I, is not used.
(5.1)
The vehicle stabilized itself in the air concerning the rotations in all three-body axes.
The stabilization of yaw angle is given in Figure 5.13. It is seen that the wires that
mounts the vehicle to experimental metal cast, resist the motion of the platform. The
vehicle tried to drive itself along the body frame axis but the wires strongly resist to
this motion. The rotation angles about the body frame axis are controllable but only
the yaw angle is tested in different reference angles because of the protective wires.
The roll and pitch angle references other than zero results in a thrust generation on
the vehicle resulting in unbalanced movements in the test bed. It should be noted that
the signal sampling from the sensor is made with 1 kHz. The result of yaw angle
motion due to reference angles of 45 and -10 degrees are given in the following
Figure 5.14.
����
����
�
−−−
−−−
=
− 17809,009,39622,053678,071041,00018582,0
62184,000010951,027233,054172,070379,00018756,0
5e
K
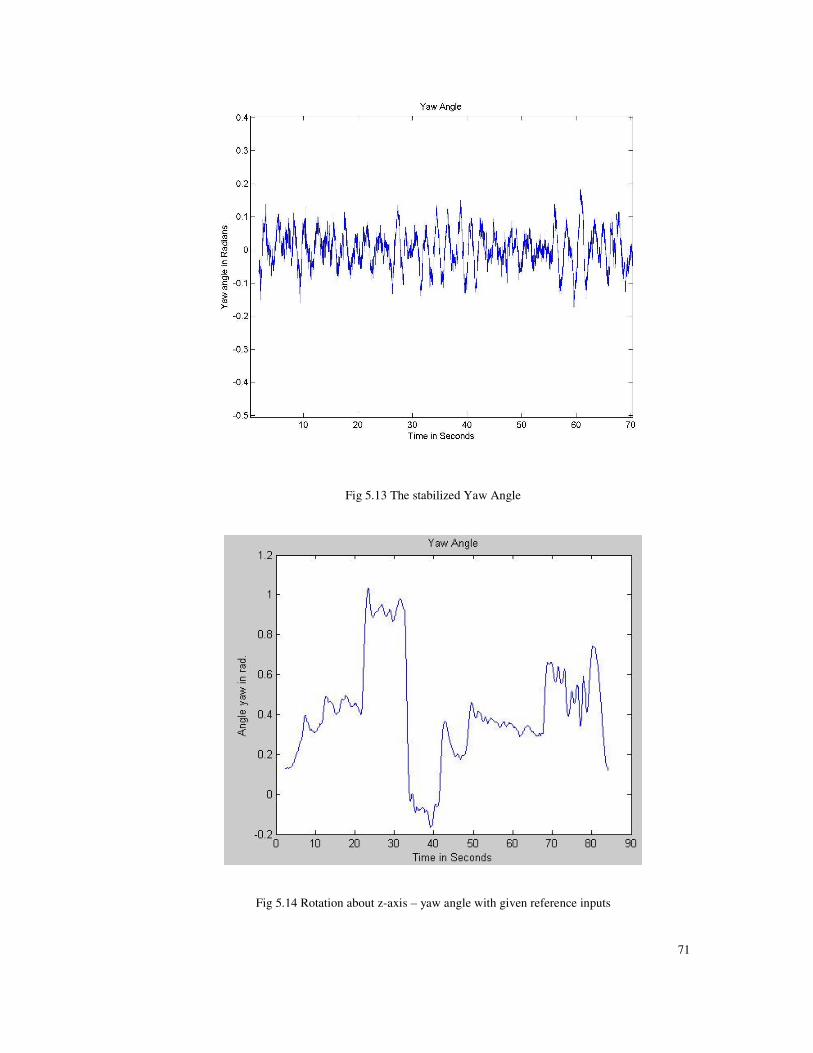
71
Fig 5.13 The stabilized Yaw Angle
Fig 5.14 Rotation about z-axis – yaw angle with given reference inputs
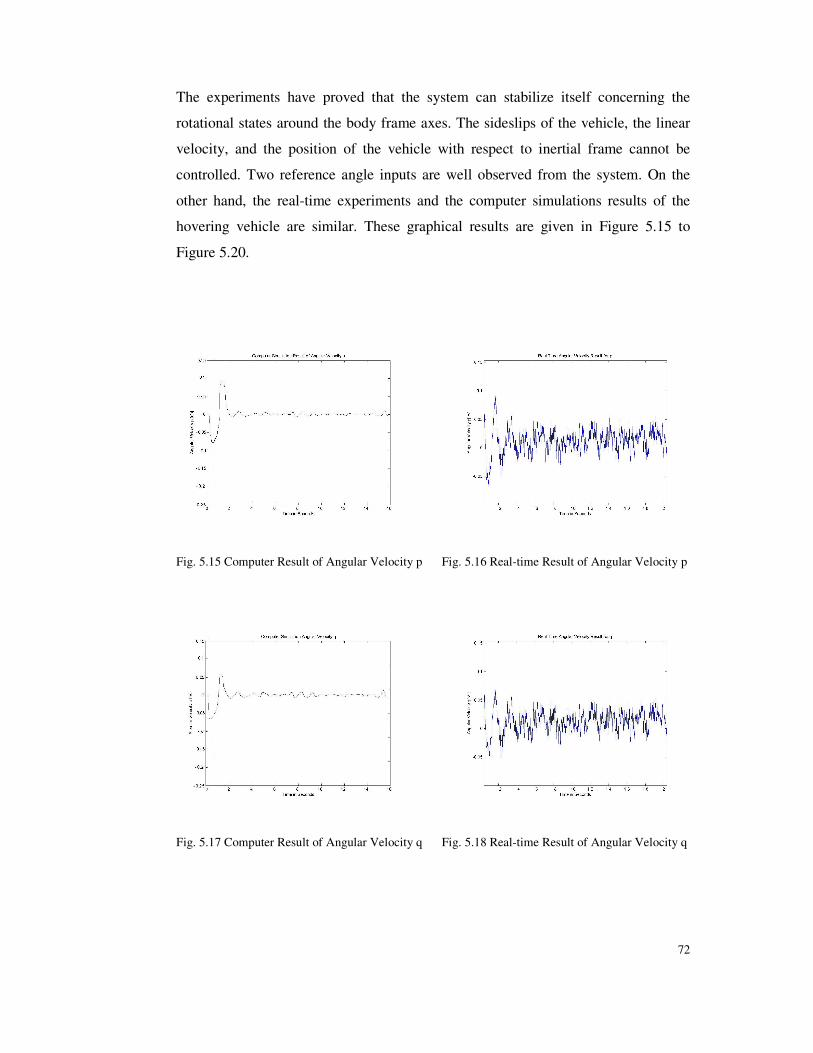
72
The experiments have proved that the system can stabilize itself concerning the
rotational states around the body frame axes. The sideslips of the vehicle, the linear
velocity, and the position of the vehicle with respect to inertial frame cannot be
controlled. Two reference angle inputs are well observed from the system. On the
other hand, the real-time experiments and the computer simulations results of the
hovering vehicle are similar. These graphical results are given in Figure 5.15 to
Figure 5.20.
Fig. 5.15 Computer Result of Angular Velocity p Fig. 5.16 Real-time Result of Angular Velocity p
Fig. 5.17 Computer Result of Angular Velocity q Fig. 5.18 Real-time Result of Angular Velocity q
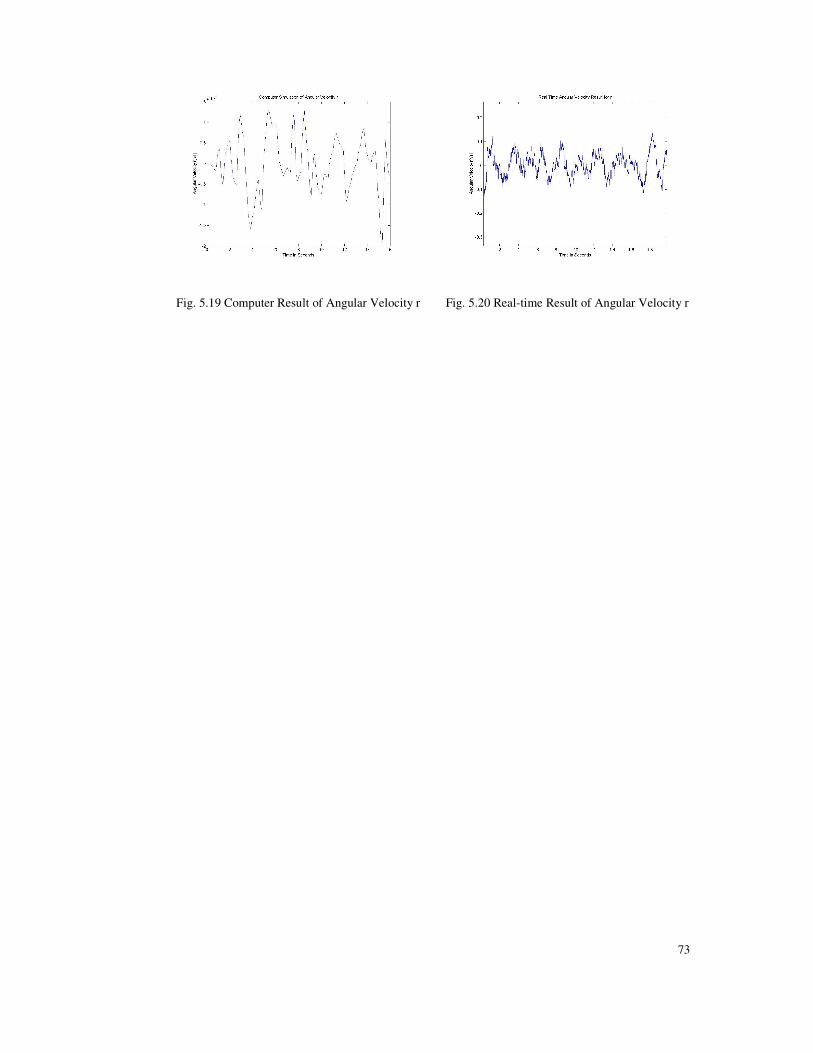
73
Fig. 5.19 Computer Result of Angular Velocity r Fig. 5.20 Real-time Result of Angular Velocity r
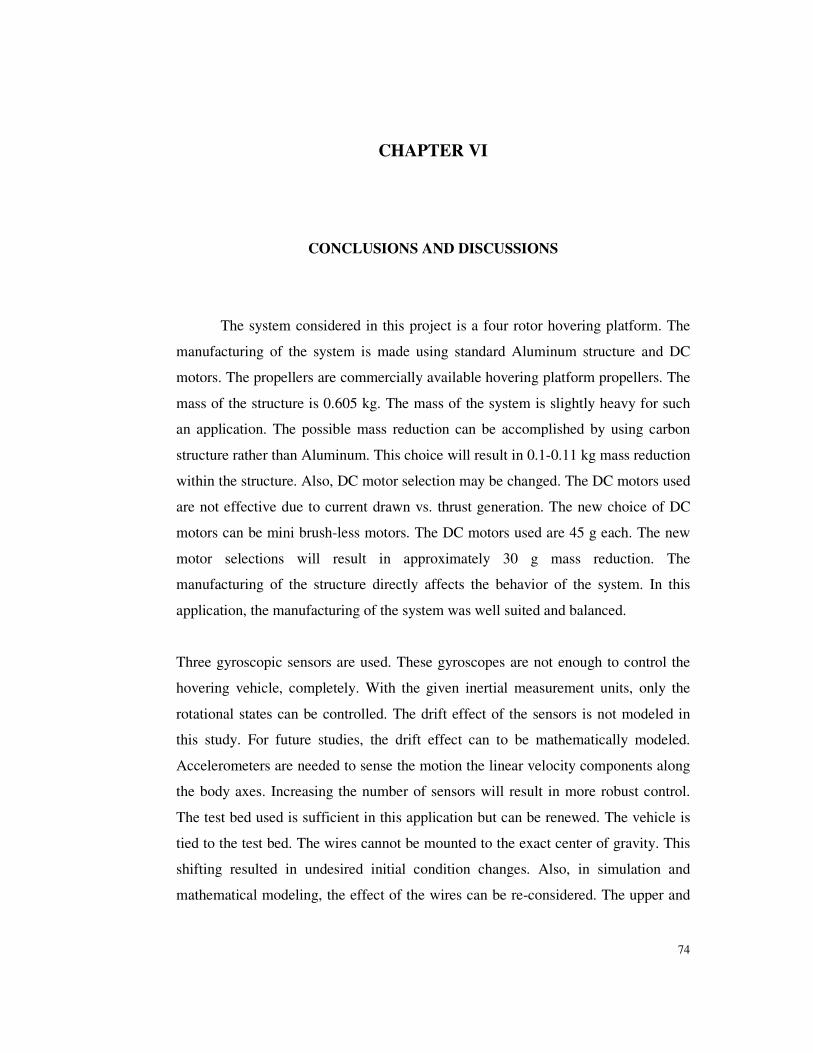
74
CHAPTER VI
CONCLUSIONS AND DISCUSSIONS
The system considered in this project is a four rotor hovering platform. The
manufacturing of the system is made using standard Aluminum structure and DC
motors. The propellers are commercially available hovering platform propellers. The
mass of the structure is 0.605 kg. The mass of the system is slightly heavy for such
an application. The possible mass reduction can be accomplished by using carbon
structure rather than Aluminum. This choice will result in 0.1-0.11 kg mass reduction
within the structure. Also, DC motor selection may be changed. The DC motors used
are not effective due to current drawn vs. thrust generation. The new choice of DC
motors can be mini brush-less motors. The DC motors used are 45 g each. The new
motor selections will result in approximately 30 g mass reduction. The
manufacturing of the structure directly affects the behavior of the system. In this
application, the manufacturing of the system was well suited and balanced.
Three gyroscopic sensors are used. These gyroscopes are not enough to control the
hovering vehicle, completely. With the given inertial measurement units, only the
rotational states can be controlled. The drift effect of the sensors is not modeled in
this study. For future studies, the drift effect can to be mathematically modeled.
Accelerometers are needed to sense the motion the linear velocity components along
the body axes. Increasing the number of sensors will result in more robust control.
The test bed used is sufficient in this application but can be renewed. The vehicle is
tied to the test bed. The wires cannot be mounted to the exact center of gravity. This
shifting resulted in undesired initial condition changes. Also, in simulation and
mathematical modeling, the effect of the wires can be re-considered. The upper and
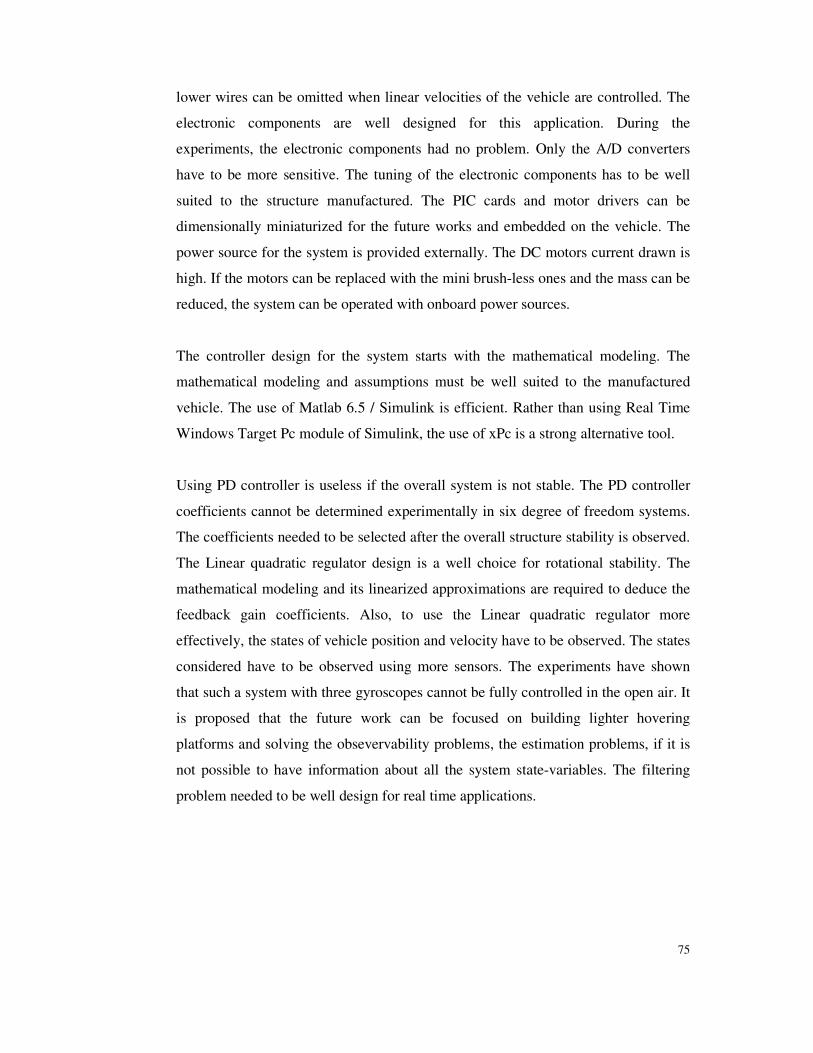
75
lower wires can be omitted when linear velocities of the vehicle are controlled. The
electronic components are well designed for this application. During the
experiments, the electronic components had no problem. Only the A/D converters
have to be more sensitive. The tuning of the electronic components has to be well
suited to the structure manufactured. The PIC cards and motor drivers can be
dimensionally miniaturized for the future works and embedded on the vehicle. The
power source for the system is provided externally. The DC motors current drawn is
high. If the motors can be replaced with the mini brush-less ones and the mass can be
reduced, the system can be operated with onboard power sources.
The controller design for the system starts with the mathematical modeling. The
mathematical modeling and assumptions must be well suited to the manufactured
vehicle. The use of Matlab 6.5 / Simulink is efficient. Rather than using Real Time
Windows Target Pc module of Simulink, the use of xPc is a strong alternative tool.
Using PD controller is useless if the overall system is not stable. The PD controller
coefficients cannot be determined experimentally in six degree of freedom systems.
The coefficients needed to be selected after the overall structure stability is observed.
The Linear quadratic regulator design is a well choice for rotational stability. The
mathematical modeling and its linearized approximations are required to deduce the
feedback gain coefficients. Also, to use the Linear quadratic regulator more
effectively, the states of vehicle position and velocity have to be observed. The states
considered have to be observed using more sensors. The experiments have shown
that such a system with three gyroscopes cannot be fully controlled in the open air. It
is proposed that the future work can be focused on building lighter hovering
platforms and solving the obsevervability problems, the estimation problems, if it is
not possible to have information about all the system state-variables. The filtering
problem needed to be well design for real time applications.
76
REFERENCES
Altu� E., Mahony R., Ostrowski J. P., ”Control of a Quadrotor Helicopter Using Visual Feedback”, Robotics and Automation 2002 Proceedings, ICRA 02 IEEE International Conference, Volume 1, pages 72-77, May 2002,
Apkarian J., “Internet Control“, Circuit Cellar-The Magazine for Computer Applications, Issue 110, September 1999, Future Article, Retrieved October 2003, from http://www.circuitcellar.com/library/print/0999/Apkar110,
Borenstein, J. and Koren, Y., "Motion Control Analysis of a Mobile Robot" Transactions of ASME, Journal of Dynamics, Measurement and Control, Vol. 109, No. 2, pp. 73-79., October 1987,
Brogan W. L., “Modern Control Theory”, New Jersey, Prentice Hall, 1991,675-684,
Castillo P., Dzul A., Lozano R., “Real-time Stabilization and Tracking of a Four Rotor Mini-Rotorcraft”, IEEE Transactions on Control System Technology, Volume:12, Issue: 4 , Pages:510 – 516, July 2004,
Cheng M., Huzmezan M., "A Simulation Model and Hinf Loop shaping Control of a Quad Rotor Unmanned Air Vehicle”, Proceedings of MS’03 Conference, Palm Springs,CA, USA, February 2003, Retvied December 2003, from http://www.ece.ubc.ca/~huzmezan/pcopies.html,
D. Goshen-Meskin, “Observability Analysis of Piece-Wise Constant Systems-Part I: Theory”, IEEE Transactions in Aerospace and Electronic Systems, Vol. 28, No:4, October 1992, Dorf. R.C., Bishop R. H., “Modern Control Systems-Tenth Edition“, Prentice Hall, 2001, 110-123, Ellis R., Gulick D., “Calculus I and several variables”, Saunders, 1991, 714-716,
Gibb J., Jones C., Lee T., “A purpose Built Robot for Aerial Surveillance”. The University of British Columbia, 2001, Retrieved July 2002, from controls.ae.gatech.edu/gtar/ iarcpapers/british_columbia2000.pdf,
Hamel T., Mahony R., Lozano R., Ostrwski J., ”Dynamic Modeling and Configuration Stabilization for an X-4 Flyer ”, 15th Triennial World Congress-Spain, 2002, Retrieved August 2003, from http://www.hds.utc.fr/~helico/publications.html,
77
Hespanha J. P., “Optimal Control; LQR/LQG Controller Design“, Lecture Notes, May 1 2004, Retrieved May 2004, from http://www.ece.ucsb.edu/~hespanha/,
Judd K., “Nonlinear State Estimation, Indistinguishable States and Extended Kalman Filter”, Physica D 183, p:273-281, 2003.
Keennon M. T., Grasmayer J. M., “Development of Black Widow Micro Air Vehicle”. AeroVironment Inc., U.S., 2002, Retrieved January 2003, from www.aerovironment.com/ area-aircraft/prod-serv/bwidpap.pdf,
Kroo I., “Mesicopter Interim Reports”, Stanford University, 2001, Retrieved May 2002, from adg.stanford.edu/mesicopter/ProgressReports/,
Lewis F.L., “Control System Design Project Lecture Notes”, 1999, Retrieved February 2002, from http://arri.uta.edu/acs/ee4343/lectures99/rlocus2.pdf,
Marti S., ”The zero G eye: towards a free hovering camera” Technical report of final project, M.I.T. 2000, Retrieved June 2003, from http://web.media.mit.edu/- ~stefanm/HowTo/ZeroGEye.html, Michelson R.C., “Update on Flapping Wing Micro Air Vehicle Research”, Georgia Tech Research Institute, 2000, Retrieved May 2002, from http://avdil.gtri.- gatech.edu/RCM/RCM/Entomopter/EntomopterProject.html, Musial M., Hommel G., Brandenburg U. W., “Technische Universtat Berlin’s Flying Robot Competition at the IARC’99“, Technische Universitat Berlin, 1999, Retrieved May 2002, from http://pdv.cs.tu-berlin.de/leute/musial.html,
Nice E. B., “Design of a Four Rotor Hovering Vehicle”, Master Thesis in Cornell University, May 2004, Retrieved July 2004, from dspace.library.cornell.edu/ -bitstream/1813/93/2/Designof4RotHoverVehicle.pdf,
Oppenheim A.V., Schafer R. W., “Discrete-time Signal Processing“, Prentice Hall, 1999,
Yavrucuk, I.;Kannan, S.; Restrepo, C.; Wills, L.; Schrage, D.; Prasad, J.V.R.; “Control Algorithm and Flight Simulation Integration Using the Open Control Platform for Unmanned Aerial Vehicles” Digital Avionics Systems Conference, Proceedings. 18th, Volume: 2, 24-29 Pages:6.A.3-1 - 6.A.3-10 vol.2, Oct. 1999, Quanser Technical Report, 2002, Retrieved May 2003, from http://echo.ryerson.ca/flashcom/applications/controlsys/,
78
Saripalli S., Roberts J. M., Corke P. I., Buskey G., “A Tale Of Two Helicopters“, Proceedings of IEEE/RSJ International Conference on Intelligent Robots and Systems, pp: 805-810, October 2003,
Scala B. F. L., Bitmead R. R., James M. R., “Conditions for Stability of Extended Kalman Filter and their Application to the Frequency Tracking Problem”,�Signal Processing, IEEE Transactions on, Volume:44, Issue:3, Pages:739 – 742, March 1996, Taylor D., “The Hovering Platform” Department of Cybernetics, University of Reading,U.K., 2000, Retrieved September 2002, from http://logicalgenetics.com/hp/,
Technology Focus, “Murata Offers Advanced Electronic Components for robots”, Dempa Publications, Inc., 2002, Retrieved May 2004, from http://www.murata.com/articles/ta0255.pdf, Welch G., Bishop G. “An introduction to Kalman Filter”, University of North Carolina, 1997, Retrieved May 2002, from http://www.cs.unc.edu/~tracker/media/pdf/SIGGRAPH2001_CoursePack_08.pdf,
Zywno M. S., Pereira, D.; “Innovative Initiatives in Control Education at Ryerson Polytechnic University-Fuzzy-Logic Control of the 3D Helicopter Simulator”, American Control Conference, 2000. Proceedings of the 2000, Volume:6, Pages:3991 – 3995, 28-30, June 2000,
79
APPENDIX I
USER’S MANUAL
The user’s manual of the hovering vehicle can be split into two major categories.
First one is the hardware of the hovering vehicle. This part includes the electronic
equipments and their connections with each other including the hovering vehicle
itself. The second part is the software of the controller. Second part includes the
controller design on computer and Matlab Software communication of each device.
PART I:
THE ELECTRONIC EQUIPMENTS AND THEIR CONNECTIONS
The electronic and mechanical hardware used to operate the hovering vehicle are
as follows;
• 1 x Humusoft Data Acquisition Card
• 2 x PIC Card
• 4 x Motor Drivers
• 2 x Power Supply
• 1 x The Hovering Vehicle
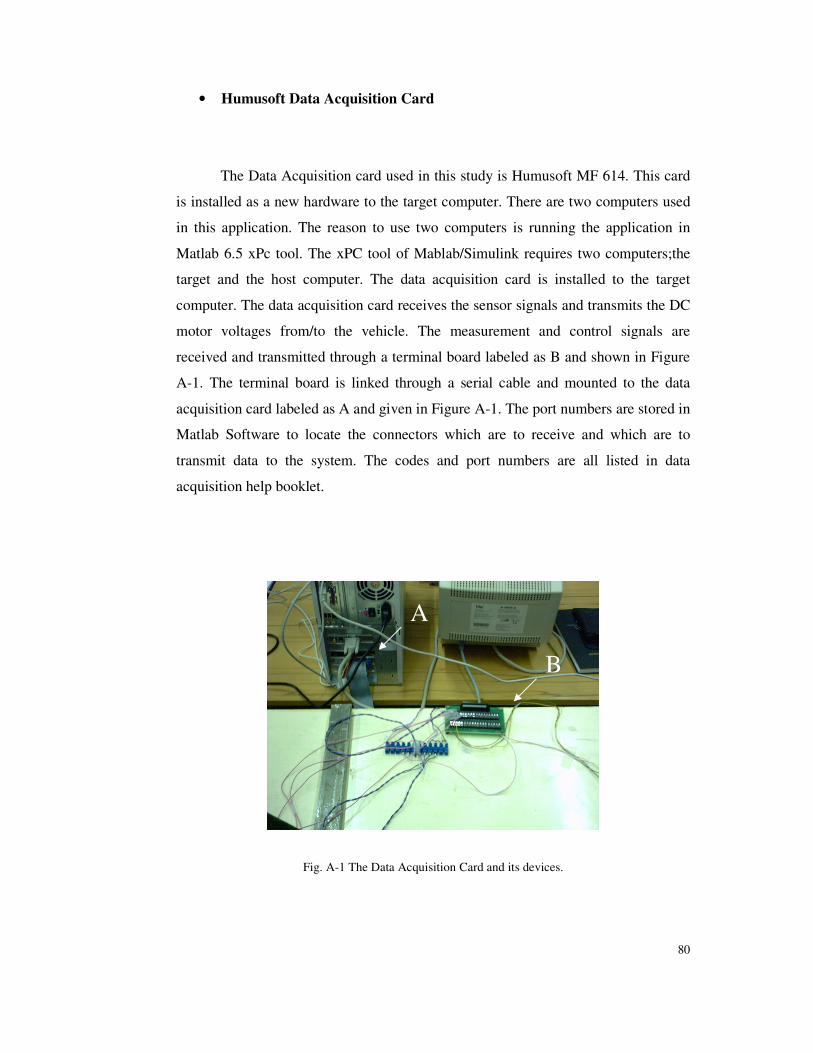
80
• Humusoft Data Acquisition Card
The Data Acquisition card used in this study is Humusoft MF 614. This card
is installed as a new hardware to the target computer. There are two computers used
in this application. The reason to use two computers is running the application in
Matlab 6.5 xPc tool. The xPC tool of Mablab/Simulink requires two computers;the
target and the host computer. The data acquisition card is installed to the target
computer. The data acquisition card receives the sensor signals and transmits the DC
motor voltages from/to the vehicle. The measurement and control signals are
received and transmitted through a terminal board labeled as B and shown in Figure
A-1. The terminal board is linked through a serial cable and mounted to the data
acquisition card labeled as A and given in Figure A-1. The port numbers are stored in
Matlab Software to locate the connectors which are to receive and which are to
transmit data to the system. The codes and port numbers are all listed in data
acquisition help booklet.
Fig. A-1 The Data Acquisition Card and its devices.
A
B
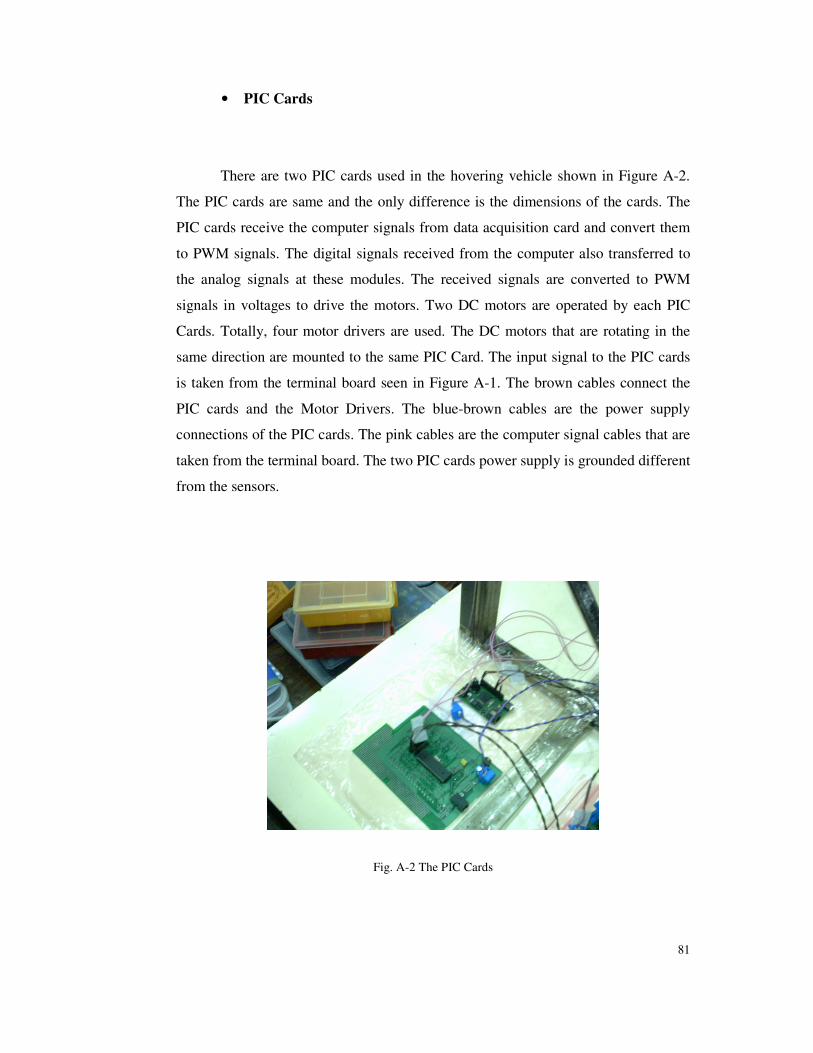
81
• PIC Cards
There are two PIC cards used in the hovering vehicle shown in Figure A-2.
The PIC cards are same and the only difference is the dimensions of the cards. The
PIC cards receive the computer signals from data acquisition card and convert them
to PWM signals. The digital signals received from the computer also transferred to
the analog signals at these modules. The received signals are converted to PWM
signals in voltages to drive the motors. Two DC motors are operated by each PIC
Cards. Totally, four motor drivers are used. The DC motors that are rotating in the
same direction are mounted to the same PIC Card. The input signal to the PIC cards
is taken from the terminal board seen in Figure A-1. The brown cables connect the
PIC cards and the Motor Drivers. The blue-brown cables are the power supply
connections of the PIC cards. The pink cables are the computer signal cables that are
taken from the terminal board. The two PIC cards power supply is grounded different
from the sensors.
Fig. A-2 The PIC Cards
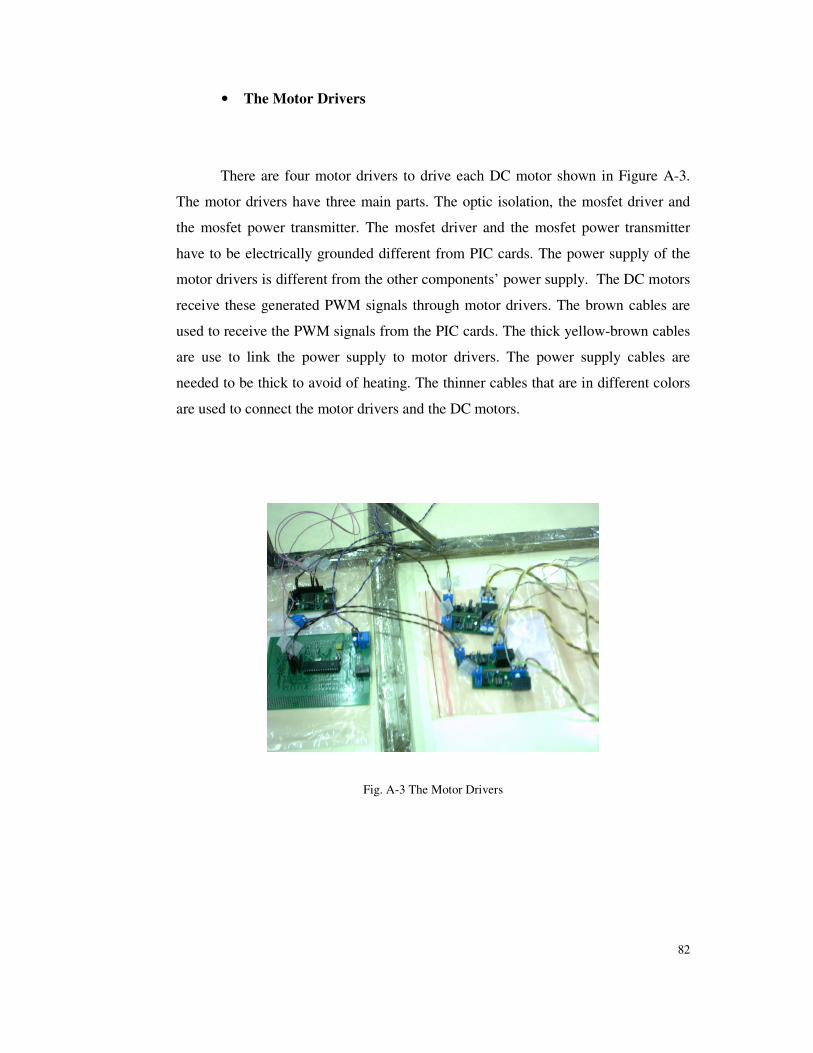
82
• The Motor Drivers
There are four motor drivers to drive each DC motor shown in Figure A-3.
The motor drivers have three main parts. The optic isolation, the mosfet driver and
the mosfet power transmitter. The mosfet driver and the mosfet power transmitter
have to be electrically grounded different from PIC cards. The power supply of the
motor drivers is different from the other components’ power supply. The DC motors
receive these generated PWM signals through motor drivers. The brown cables are
used to receive the PWM signals from the PIC cards. The thick yellow-brown cables
are use to link the power supply to motor drivers. The power supply cables are
needed to be thick to avoid of heating. The thinner cables that are in different colors
are used to connect the motor drivers and the DC motors.
Fig. A-3 The Motor Drivers
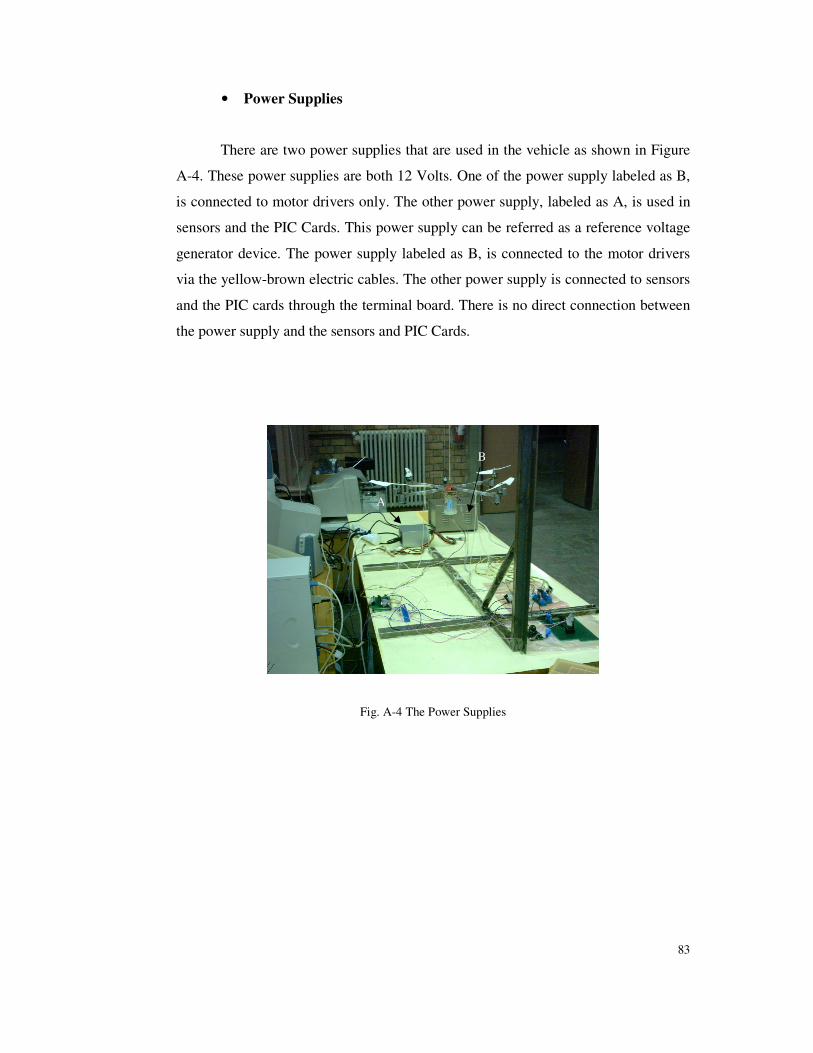
83
• Power Supplies
There are two power supplies that are used in the vehicle as shown in Figure
A-4. These power supplies are both 12 Volts. One of the power supply labeled as B,
is connected to motor drivers only. The other power supply, labeled as A, is used in
sensors and the PIC Cards. This power supply can be referred as a reference voltage
generator device. The power supply labeled as B, is connected to the motor drivers
via the yellow-brown electric cables. The other power supply is connected to sensors
and the PIC cards through the terminal board. There is no direct connection between
the power supply and the sensors and PIC Cards.
Fig. A-4 The Power Supplies
A
B
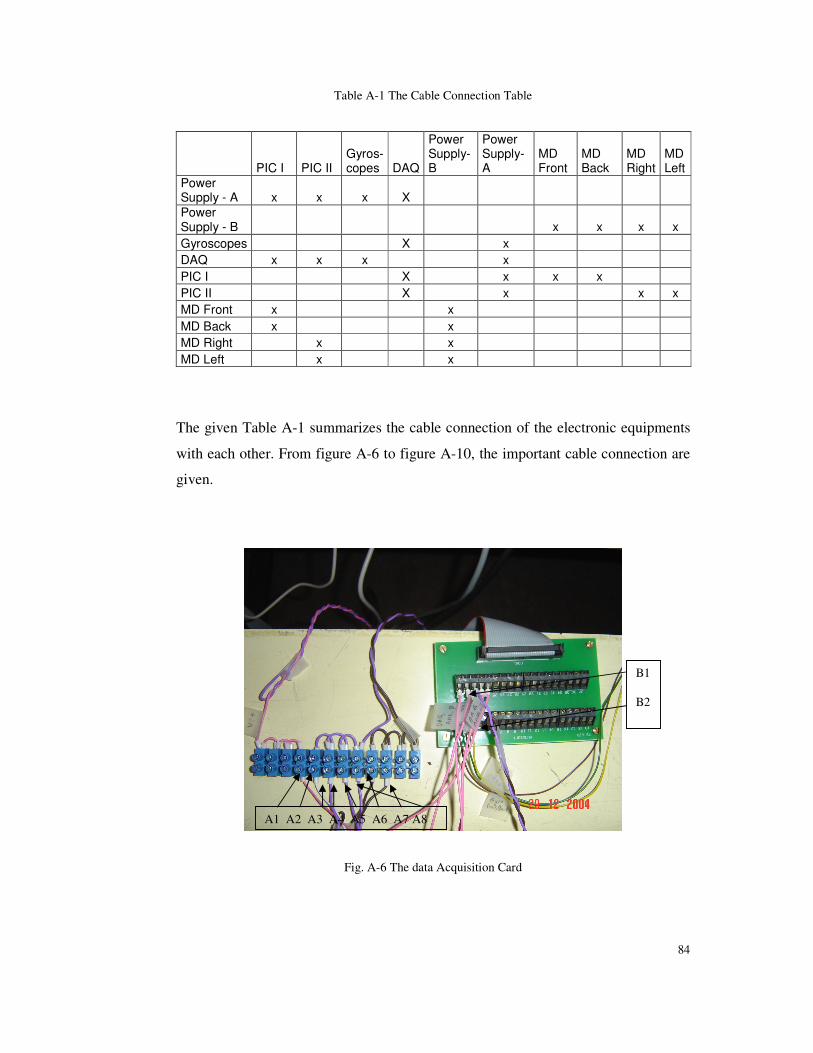
84
Table A-1 The Cable Connection Table
PIC I PIC II Gyros-copes DAQ
Power Supply-B
Power Supply-A
MD Front
MD Back
MD Right
MD Left
Power Supply - A x x x X Power Supply - B x x x x Gyroscopes X x DAQ x x x x PIC I X x x x PIC II X x x x MD Front x x MD Back x x MD Right x x MD Left x x
The given Table A-1 summarizes the cable connection of the electronic equipments
with each other. From figure A-6 to figure A-10, the important cable connection are
given.
Fig. A-6 The data Acquisition Card
A1 A2 A3 A4 A5 A6 A7 A8
B1 B2
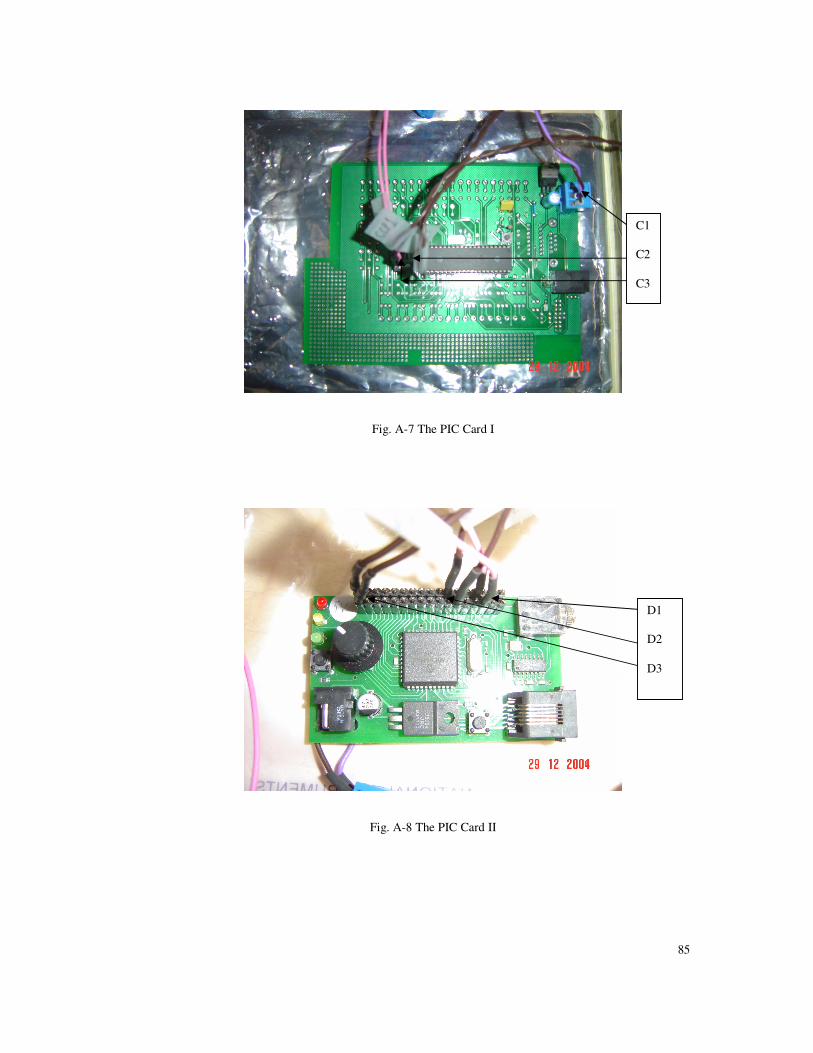
85
Fig. A-7 The PIC Card I
Fig. A-8 The PIC Card II
C1 C2 C3
D1 D2 D3
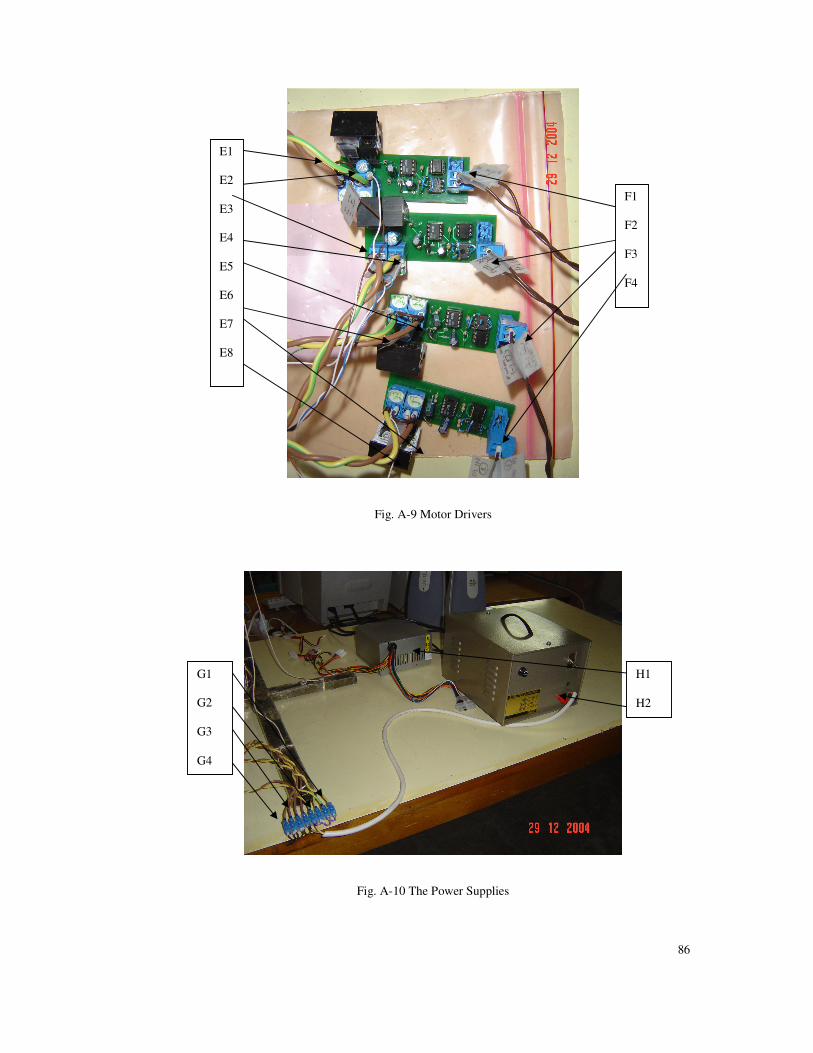
86
Fig. A-9 Motor Drivers
Fig. A-10 The Power Supplies
E1 E2 E3 E4 E5 E6 E7 E8
F1 F2 F3 F4
G1 G2 G3 G4
H1 H2
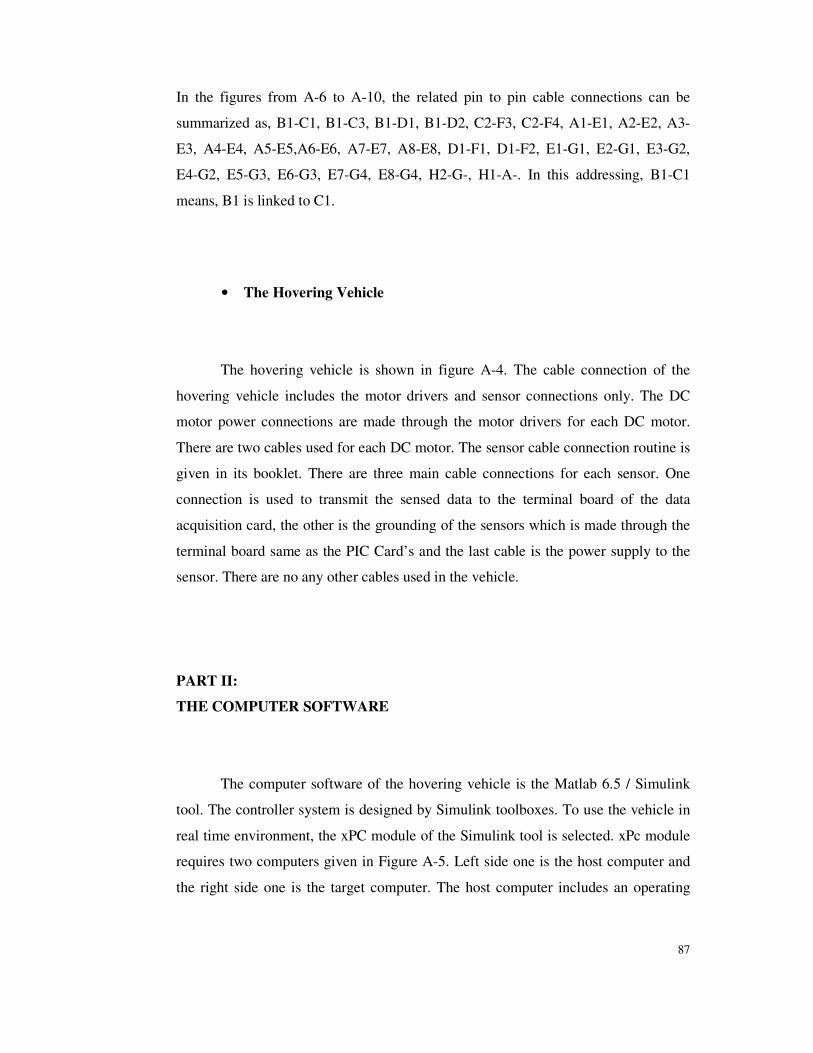
87
In the figures from A-6 to A-10, the related pin to pin cable connections can be
summarized as, B1-C1, B1-C3, B1-D1, B1-D2, C2-F3, C2-F4, A1-E1, A2-E2, A3-
E3, A4-E4, A5-E5,A6-E6, A7-E7, A8-E8, D1-F1, D1-F2, E1-G1, E2-G1, E3-G2,
E4-G2, E5-G3, E6-G3, E7-G4, E8-G4, H2-G-, H1-A-. In this addressing, B1-C1
means, B1 is linked to C1.
• The Hovering Vehicle
The hovering vehicle is shown in figure A-4. The cable connection of the
hovering vehicle includes the motor drivers and sensor connections only. The DC
motor power connections are made through the motor drivers for each DC motor.
There are two cables used for each DC motor. The sensor cable connection routine is
given in its booklet. There are three main cable connections for each sensor. One
connection is used to transmit the sensed data to the terminal board of the data
acquisition card, the other is the grounding of the sensors which is made through the
terminal board same as the PIC Card’s and the last cable is the power supply to the
sensor. There are no any other cables used in the vehicle.
PART II:
THE COMPUTER SOFTWARE
The computer software of the hovering vehicle is the Matlab 6.5 / Simulink
tool. The controller system is designed by Simulink toolboxes. To use the vehicle in
real time environment, the xPC module of the Simulink tool is selected. xPc module
requires two computers given in Figure A-5. Left side one is the host computer and
the right side one is the target computer. The host computer includes an operating
88
system like Windows 98/XP/NT and the target computer requires no operating
system. The data acquisition card is installed to the target computer. The connection
between the host computer and the target computer is made through an ethernet
cable.
Fig. A-5 The host and Target Computers
To operate the vehicle using xPc, first the two computers have to be internally
connected to each other. There is a start up floppy diskette used to run the target PC.
This diskette is needed because there is no operating system installed in the target
PC. The start up floppy diskette, the boot disk, can be prepared using the host
computer. The xPc module has a user interface to create the start up diskette and to
configure the communication ports. This user interface will be active when xpcsetup
is typed on the Matlab command line. The communication port is TCP/IP. When the
two computers are connected to each other, the designed Simulink controller model
is ready to run in real time. The installed data acquisition card creates its own
toolbox in Simulink library. This tool has to be used when receiving or transmitting
89
signal from or to vehicle. User can define many screens to follow the signals
received or transmitted in the target computer’s screen. Before starting the
application, some guidelines have to be outlined;
1- Make a new measurement of sensors drift values and re-new them in the controller
design. All the controller coefficients have to be checked. The building of the model
has to be made after this tuning is completed.
2- Built the controller model who ever wants to start a new controller test. The model
building operation can be made following tools � Real Time Workshop � Built
Model. If there is no error or warning prompt by Matlab, third step can be applied.
When the model is built, the target computer screen refreshes, too.
3- After the second step, the connect to target icon can be clicked on Simulink
window. At this step, it is advised that, someone should be ready to switch on/off the
power supplies due to an emergency.
4- Click on play icon.
5- Be sure that the voltage transmitted to the DC motors from controller is tuned to
zero or given a small value of 2 - 3 V. Switch on the power supply.
6- As the controller transmits voltage to the DC motors and receives the
measurement signal, the operation can be screened by target computer. During
operation, one can chance any reference value of voltage or angles.
7- To hover the vehicle, just increase the reference voltage values rapidly to 8-9 V.
8- To terminate the application, decrease the voltage value to zero and type stop in
the target computer command line and press disconnect from target icon in host
computer.
9- If the application is not stopped in the target computer, the data evaluation in the
host computer will not be possible.
10- In the host computer, type tg in the Matlab command screen. There are two
important points that have to be outlined in the tg menu. The time log and the output
log. The time log, stores the time and the output log stores the output results that are
defined before the application. An output can be defined using standard Simulink
output ports If the time and output logs are desired to be viewed, one should type
tg.OutputLog or tg.TimeLog in the command screen of Matlab.
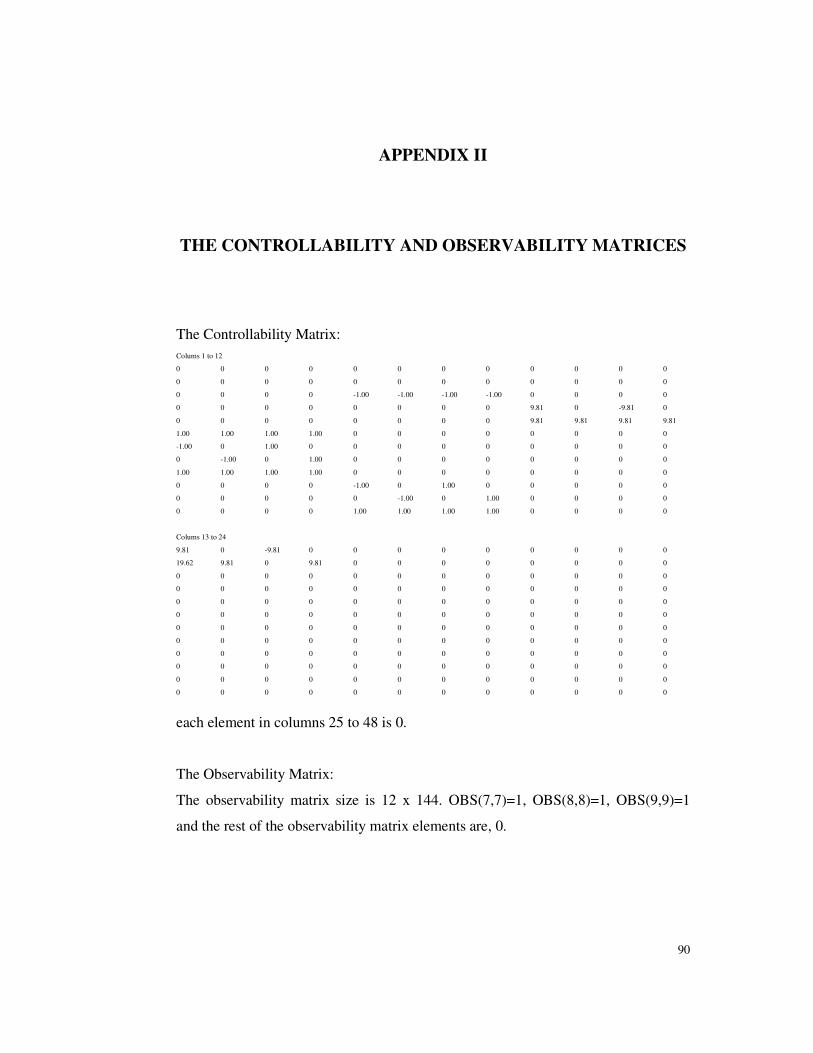
90
APPENDIX II
THE CONTROLLABILITY AND OBSERVABILITY MATRICES
The Controllability Matrix: Colums 1 to 12
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 -1.00 -1.00 -1.00 -1.00 0 0 0 0
0 0 0 0 0 0 0 0 9.81 0 -9.81 0
0 0 0 0 0 0 0 0 9.81 9.81 9.81 9.81
1.00 1.00 1.00 1.00 0 0 0 0 0 0 0 0
-1.00 0 1.00 0 0 0 0 0 0 0 0 0
0 -1.00 0 1.00 0 0 0 0 0 0 0 0
1.00 1.00 1.00 1.00 0 0 0 0 0 0 0 0
0 0 0 0 -1.00 0 1.00 0 0 0 0 0
0 0 0 0 0 -1.00 0 1.00 0 0 0 0
0 0 0 0 1.00 1.00 1.00 1.00 0 0 0 0
Colums 13 to 24
9.81 0 -9.81 0 0 0 0 0 0 0 0 0
19.62 9.81 0 9.81 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0 0 0
each element in columns 25 to 48 is 0.
The Observability Matrix:
The observability matrix size is 12 x 144. OBS(7,7)=1, OBS(8,8)=1, OBS(9,9)=1
and the rest of the observability matrix elements are, 0.


















