Delay-dependent Stability Analysis for Discrete Singular Systems with Time-varying Delays
5
Delay-dependent Stability Analysis for Discrete Singular Systems with Time-varying Delays FANG Mei 1 Abstract This paper studies the problem of stability analysis for discrete singular time delay systems. Without resorting to the decomposition and equivalent transformation of the considered system, some new delay-dependent criteria are established for the considered systems to be regular, causal, and stable in terms of linear matrix inequality (LMI) approach. The obtained criteria are less conservative, because the technique used in this paper makes more use of the information on the involved time-varying delays than the existing techniques do. A numerical example is given to illustrate the effectiveness and the benefits of the proposed methods. Key words Discrete singular system, time-varying delay, delay-dependent stability, linear matrix inequality (LMI) In the past few decades, singular systems have received intensive interest because they appear frequently in several applications, including large-scale systems, power systems, economic systems, and so on [1−2] . Many fundamental no- tions and results based on regular systems have been ex- tended to singular systems. It should be mentioned that the stability problem for singular systems is much more com- plicated than that for regular systems because it requires to consider not only stability but also regularity and absence of impulses (for continuous singular systems) or causality (for discrete singular systems) simultaneously, and the lat- ter two do not arise in the regular systems [2] . For more de- tails on singular systems, we refer the readers to [1−2] and the references therein. However, it is well known that time delays exist commonly in many practical systems, which have been generally regarded as the main source of in- stability and poor performance. Therefore, much atten- tion has been devoted to the problem of stability anal- ysis for singular systems with time delays. Both delay- independent stability results [2−3] and delay-dependent sta- bility results [4−12] were obtained for the singular time de- lay systems in terms of linear matrix inequality (LMI) ap- proach. Generally speaking, when the time delay is small enough, the delay-dependent results are generally less con- servative than the delay-independent ones. But all the above-mentioned works were developed in the context of continuous singular time delay systems. Re- cently, the stability problem for discrete singular systems with time delay was discussed in [13−19], where several delay-dependent conditions were established for the con- sidered systems to be regular, causal, and stable in terms of linear matrix inequality (LMI) approach. But the in- volved time delays of [13−19] are all time invariant, which limits the scope of applications of the established stability results. In the case where time-varying delays appear in the discrete singular systems, [20−22] made use of the free- weighting matrices method [23−25] to establish some delay- dependent stability conditions in terms of LMI approach. However, it should be mentioned that the decomposition and equivalent model transformation of the original system matrices are involved in [20] and the established condition is in terms of the coefficient matrices of the decomposed systems, which makes the stability analysis procedure in- direct and complicated. It should also be pointed out that some useful terms are ignored in the Lyapunov functionals reported in [20−22]. The ignorance of these terms may lead to conservatism to some extent. Therefore, it is important Manuscript received February 20, 2009; accepted October 30, 2009 1. Business School, Ningbo City College of Vocational Technology, Ningbo 315000, P. R. China DOI: 10.1016/S1874-1029(09)60033-1 and necessary to further improve the stability results on discrete singular systems with time-varying delay. In this paper, the problem of delay-dependent stabil- ity is discussed for discrete singular systems with time- varying delays in terms of LMI approach. Some new delay- dependent sufficient conditions are established for the dis- crete singular systems to be regular, causal, and stable. Unlike the condition in [20], the derived conditions in this paper are in terms of all the coefficient matrices of the orig- inal system, which avoids the decomposition and transfor- mation of the given singular system. Furthermore, because the Lyapunov functional and the technique reported in this paper make more use of the information on the considered time-varying delays than those in [20−22], our results have less conservatism, which will be demonstrated by a numer- ical example. 1 Problem formulation Consider discrete singular systems with time-varying de- lays described by Ex(k + 1) = Ax(k)+ A d x(k − d(k)) x(k)= φ(k),k ∈ [−d2, 0] (1) where x(k) ∈ R n is the state vector and d(k) is a time- varying delay satisfying d1 ≤ d(k) ≤ d2, where d1 and d2 are prescribed positive integers representing the lower and upper bounds of the time delay, respectively. φ(k) is the compatible initial condition. The matrix E ∈ R n×n may be singular, and it is assumed that rank (E)= r ≤ n. A and A d are known real constant matrices with appropriate dimensions. The following definition will be used in the proof of the main results. Definition 1 [15, 20] . For given integers d1 > 0, d2 > 0, the discrete singular time delay system (1) is said to be regular and causal for any time delay d(k) satisfying d1 ≤ d(k) ≤ d2, if the pair (E,A) is regular and causal. Definition 2 [15, 20] . The discrete singular time delay system (1) is said to be stable if for any scalar ε> 0, there exists a scalar δ(ε) > 0 such that, for any compatible initial conditions φ(k) satisfying sup −d 2 ≤k≤0 φ(k)≤ δ(ε), the solution x(k) of system (1) satisfies x(k)≤ ε for any k ≥ 0, moreover lim k→∞ x(k)= 0. In this paper, we analyze the stability of system (1), and new stability criteria that are less conservative than the existing ones will be proposed. 2 Main results Theorem 1. For given integers d1 > 0 and d2 > 0,
Transcript of Delay-dependent Stability Analysis for Discrete Singular Systems with Time-varying Delays

Delay-dependent Stability Analysis for Discrete SingularSystems with Time-varying Delays
FANG Mei1
Abstract This paper studies the problem of stability analysis for discrete singular time delay systems. Without resorting to thedecomposition and equivalent transformation of the considered system, some new delay-dependent criteria are established for theconsidered systems to be regular, causal, and stable in terms of linear matrix inequality (LMI) approach. The obtained criteria areless conservative, because the technique used in this paper makes more use of the information on the involved time-varying delaysthan the existing techniques do. A numerical example is given to illustrate the effectiveness and the benefits of the proposed methods.
Key words Discrete singular system, time-varying delay, delay-dependent stability, linear matrix inequality (LMI)
In the past few decades, singular systems have receivedintensive interest because they appear frequently in severalapplications, including large-scale systems, power systems,economic systems, and so on[1−2]. Many fundamental no-tions and results based on regular systems have been ex-tended to singular systems. It should be mentioned that thestability problem for singular systems is much more com-plicated than that for regular systems because it requires toconsider not only stability but also regularity and absenceof impulses (for continuous singular systems) or causality(for discrete singular systems) simultaneously, and the lat-
ter two do not arise in the regular systems[2]. For more de-tails on singular systems, we refer the readers to [1−2] andthe references therein. However, it is well known that timedelays exist commonly in many practical systems, whichhave been generally regarded as the main source of in-stability and poor performance. Therefore, much atten-tion has been devoted to the problem of stability anal-ysis for singular systems with time delays. Both delay-independent stability results[2−3] and delay-dependent sta-bility results[4−12] were obtained for the singular time de-lay systems in terms of linear matrix inequality (LMI) ap-proach. Generally speaking, when the time delay is smallenough, the delay-dependent results are generally less con-servative than the delay-independent ones.
But all the above-mentioned works were developed inthe context of continuous singular time delay systems. Re-cently, the stability problem for discrete singular systemswith time delay was discussed in [13−19], where severaldelay-dependent conditions were established for the con-sidered systems to be regular, causal, and stable in termsof linear matrix inequality (LMI) approach. But the in-volved time delays of [13−19] are all time invariant, whichlimits the scope of applications of the established stabilityresults. In the case where time-varying delays appear inthe discrete singular systems, [20−22] made use of the free-
weighting matrices method[23−25] to establish some delay-dependent stability conditions in terms of LMI approach.However, it should be mentioned that the decompositionand equivalent model transformation of the original systemmatrices are involved in [20] and the established conditionis in terms of the coefficient matrices of the decomposedsystems, which makes the stability analysis procedure in-direct and complicated. It should also be pointed out thatsome useful terms are ignored in the Lyapunov functionalsreported in [20−22]. The ignorance of these terms may leadto conservatism to some extent. Therefore, it is important
Manuscript received February 20, 2009; accepted October 30, 20091. Business School, Ningbo City College of Vocational Technology,
Ningbo 315000, P.R. ChinaDOI: 10.1016/S1874-1029(09)60033-1
and necessary to further improve the stability results ondiscrete singular systems with time-varying delay.
In this paper, the problem of delay-dependent stabil-ity is discussed for discrete singular systems with time-varying delays in terms of LMI approach. Some new delay-dependent sufficient conditions are established for the dis-crete singular systems to be regular, causal, and stable.Unlike the condition in [20], the derived conditions in thispaper are in terms of all the coefficient matrices of the orig-inal system, which avoids the decomposition and transfor-mation of the given singular system. Furthermore, becausethe Lyapunov functional and the technique reported in thispaper make more use of the information on the consideredtime-varying delays than those in [20−22], our results haveless conservatism, which will be demonstrated by a numer-ical example.
1 Problem formulation
Consider discrete singular systems with time-varying de-lays described by
Exxx(k + 1) = Axxx(k) + Adxxx(k − d(k))
xxx(k) = φφφ(k), k ∈ [−d2, 0](1)
where xxx(k) ∈ Rn is the state vector and d(k) is a time-varying delay satisfying d1 ≤ d(k) ≤ d2, where d1 and d2
are prescribed positive integers representing the lower andupper bounds of the time delay, respectively. φφφ(k) is thecompatible initial condition. The matrix E ∈ Rn×n maybe singular, and it is assumed that rank (E) = r ≤ n. Aand Ad are known real constant matrices with appropriatedimensions.
The following definition will be used in the proof of themain results.
Definition 1[15, 20]. For given integers d1 > 0, d2 > 0,the discrete singular time delay system (1) is said to beregular and causal for any time delay d(k) satisfying d1 ≤d(k) ≤ d2, if the pair (E, A) is regular and causal.
Definition 2[15, 20]. The discrete singular time delaysystem (1) is said to be stable if for any scalar ε > 0,there exists a scalar δ(ε) > 0 such that, for any compatibleinitial conditions φ(k) satisfying sup−d2≤k≤0 ‖φφφ(k)‖ ≤ δ(ε),the solution xxx(k) of system (1) satisfies ‖xxx(k)‖ ≤ ε for anyk ≥ 0, moreover limk→∞ xxx(k) = 0.
In this paper, we analyze the stability of system (1), andnew stability criteria that are less conservative than theexisting ones will be proposed.
2 Main results
Theorem 1. For given integers d1 > 0 and d2 > 0,

752 ACTA AUTOMATICA SINICA Vol. 36
the discrete singular time delay system (1) is regular,causal, and stable for any time-varying delay d(k) satisfyingd1 ≤ d(k) ≤ d2, if there exist symmetric positive-definitematrices P , Qi (i = 1, 2, 3), Zl (l = 1, 2), and matrices Sj
(j = 1, 2) such that
Ξ =
⎡⎢⎢⎣
Φ11 ΦT12P d1Φ
T13Z1 d12Φ
T13Z2
∗ −P 0 0∗ ∗ −Z1 0∗ ∗ ∗ −Z2
⎤⎥⎥⎦ < 0 (2)
where d12 = d2 − d1, R ∈ Rn×(n−r) is any matrix with fullcolumn rank and satisfies ETR = 0, and
Φ11 =
⎡⎢⎢⎣
Ξ11 Ξ12 0 ETZ1E∗ Ξ22 ETZ2E ETZ2E∗ ∗ Ξ33 0∗ ∗ ∗ Ξ44
⎤⎥⎥⎦
Ξ11 = − ETPE + Q1 + (d12 + 1)Q2 + Q3−ETZ1E + S1R
TA + ATRST1
Ξ12 = S1RTAd + ATRST
2
Ξ22 = − Q2 − 2ETZ2E + S2RTAd + AT
d RST2
Ξ33 = − Q3 − ETZ2E
Ξ44 = − Q1 − ETZ1E − ETZ2E
Φ12 =[A Ad 0 0
]Φ13 =
[A − E Ad 0 0
]Proof. We first show that the system (1) is regular
and causal for any time-varying delay d(k) satisfying d1 ≤d(k) ≤ d2. To this end, we choose two nonsingular matricesG and H such that
GEH =
[Ir 00 0
]
Set
GAH =
[A1 A2
A3 A4
], HTS =
[S1
S2
], G−TR =
[0I
]U
where U ∈ R(n−r)×(n−r) is any nonsingular matrix. Then,Pre- and post-multiplying Ξ11 < 0 by HT and H, respec-tively, we have S2U
TA4 +AT4 UST
2 < 0, which implies A4 isnonsingular. Thus, the pair (E, A) is regular and causal[1].According to Definition 1, the system (1) is regular andcausal for any time-varying delay satisfying d1 ≤ d(k) ≤ d2.
Next, we will show that system (1) is stable for any time-varying delay satisfying d1 ≤ d(k) ≤ d2. To this end, wedefine ηηη(k) = xxx(k + 1) − xxx(k) and consider the followingLyapunov functional candidate for system (1):
V (k) = V1(k) + V2(k) (3)
where
V1(k) = xxx(k)TETPExxx(k) +
k−1∑i=k−d1
xxx(i)TQ1xxx(i) +
k−1∑i=k−d2
xxx(i)TQ3xxx(i) +
−d1+1∑j=−d2+1
k−1∑i=k−1+j
xxx(i)TQ2xxx(i)
V2(k) = d1
−1∑j=−d1
k−1∑i=k+j
ηηη(i)TETZ1Eηηη(i) +
d12
−d1−1∑j=−d2
k−1∑i=k+j
ηηη(i)TETZ2Eηηη(i)
Define ΔV (k) = V (k + 1)− V (k). Then, along the solu-tion of system (1), we have
ΔV1(k) ≤ xxx(k + 1)TETPExxx(k + 1) −xxx(k)TETPExxx(k) +
xxx(k)TQ1xxx(k) − xxx(k − d1)TQ1xxx(k − d1) +
xxx(k)TQ3xxx(k) − xxx(k − d2)TQ3xxx(k − d2) +
(d12 + 1)xxx(k)TQ2xxx(k) −xxx(k − d(k))TQ2xxx(k − d(k)) +
2[xxx(k)TS1R
T + xxx(k − d(k))TS2RT]×
Exxx(k + 1)
(4)
and
ΔV2(k) = d21ηηη(k)TETZ1Eηηη(k) −
d1
k−1∑i=k−d1
ηηη(i)TETZ1Eηηη(i) +
d212ηηη(k)TETZ2Eηηη(k) −
d12
k−d1−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i)
(5)
It is easy to get that
−d1
k−1∑i=k−d1
ηηη(i)TETZ1Eηηη(i) ≤
−⎡⎣ k−1∑
i=k−d1
ηηη(i)TET
⎤⎦ Z1
⎡⎣E
k−1∑i=k−d1
ηηη(i)
⎤⎦ =
[xxx(k)
xxx(k − d1)
]T [−ETZ1E ETZ1E∗ −ETZ1E
] [xxx(k)
xxx(k − d1)
]
(6)
and
− d12
k−d1−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) =
− d12
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)−
d12
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) ≤
− (d(k) − d1)
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)−
(d2 − d(k))
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) ≤
−⎡⎣ k−d1−1∑
i=k−d(k)
ηηη(i)TET
⎤⎦ Z2
⎡⎣E
k−d1−1∑i=k−d(k)
ηηη(i)
⎤⎦ −

No. 5 FANG Mei: Delay-dependent Stability Analysis for Systems with Discrete Singular Systems with · · · 753
⎡⎣k−d(k)−1∑
i=k−d2
ηηη(i)TET
⎤⎦ Z2
⎡⎣E
k−d(k)−1∑i=k−d2
ηηη(i)
⎤⎦ =
⎡⎣xxx(k − d(k))
xxx(k − d1)xxx(k − d2)
⎤⎦
T ⎡⎣−2ETZ2E ETZ2E ETZ2E
∗ −ETZ2E 0∗ ∗ −ETZ2E
⎤⎦×
⎡⎣xxx(k − d(k))
xxx(k − d1)xxx(k − d2)
⎤⎦ (7)
Thus,
ΔV (k) ≤ ξξξ(k)TΘξξξ(k) (8)
where
Θ = Φ11 + ΦT12PΦ12 + ΦT
13(d21Z1 + d2
12Z2)Φ13
ξξξ(k) =[xxx(k)T xxx(k − d(k))T xxx(k − d2)
T xxx(k − d1)T]T
According to Schur complements, Θ < 0 is equivalent to(2). Hence, there exists a scalar α > 0 such that
ΔV (k) ≤ −α‖xxx(k)‖2 (9)
Using the similar method of [15], (9) implies that the sys-tem (1) is stable. �
It is noted that in (7), the terms
−d12
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)
and
−d12
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i)
are expanded as
−(d(k) − d1)
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)
and
−(d2 − d(k))
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i)
respectively. It is obvious that such treatment may leadto conservatism, so there is room for further investigation.Next, an improved stability criterion of Theorem 1 can bedeveloped as follows.
Theorem 2. For given integers d1 > 0 and d2 > 0,the discrete singular time delay system (1) is regular,causal, and stable for any time-varying delay d(k) satisfyingd1 ≤ d(k) ≤ d2, if there exist symmetric positive-definitematrices P , Qi (i = 1, 2, 3), Zl (l = 1, 2), and matrices Sj
(j = 1, 2) such that
Ξ − ΔTf ETZ2EΔf < 0, f = 1, 2 (10)
where Ξ follows the same definition as the one inTheorem 1 and
Δ1 =[0 I 0 −I 0 0 0
]Δ2 =
[0 I −I 0 0 0 0
]
Proof. Because (7) can be rewritten as
− d12
k−d1−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) =
− d12
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)−
d12
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) =
− (d(k) − d1)
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)−
(d2 − d(k))
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i)−
(d2 − d(k))
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i)−
(d(k) − d1)
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i)
(11)
Let g(k) = (d(k) − d1)/d12, we can get 0 ≤ g(k) ≤ 1 andd2 − d(k) = (1 − g(k))d12. Thus,
− (d2 − d(k))
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i) =
− (1 − g(k))d12
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i) ≤
− (1 − g(k))(d(k) − d1)
k−d1−1∑i=k−d(k)
ηηη(i)TETZ2Eηηη(i) ≤
− (1 − g(k))
⎡⎣ k−d1−1∑
i=k−d(k)
ηηη(i)TET
⎤⎦Z2
⎡⎣E
k−d1−1∑i=k−d(k)
ηηη(i)
⎤⎦=
− (1 − g(k))
[xxx(k − d(k))xxx(k − d1)
]T [ETZ2E −ETZ2E
∗ ETZ2E
]×
[xxx(k − d(k))xxx(k − d1)
](12)
and
− (d(k) − d1)
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) =
− g(k)d12
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) ≤
− g(k)(d2 − d(k))
k−d(k)−1∑i=k−d2
ηηη(i)TETZ2Eηηη(i) ≤
− g(k)
⎡⎣k−d(k)−1∑
i=k−d2
ηηη(i)TET
⎤⎦ Z2
⎡⎣E
k−d(k)−1∑i=k−d2
ηηη(i)
⎤⎦ =

754 ACTA AUTOMATICA SINICA Vol. 36
− g(k)
[xxx(k − d(k))xxx(k − d2)
]T [ETZ2E −ETZ2E
∗ ETZ2E
]×
[xxx(k − d(k))xxx(k − d2)
]
Thus, we can get from (4) ∼ (6) that
ΔV (k) ≤ ξξξ(k)T((1 − g(k))(Θ − ΨT1 ETZ2EΨ1) +
g(k)(Θ − ΨT2 ETZ2EΨ2))ξξξ(k)
where ξξξ(k) and Θ follow the same definitions as those in(8), and
Ψ1 =[0 I 0 −I
]Ψ2 =
[0 I −I 0
]
According to Schur complements, Θ − ΨT1 ETZ2EΨ1 < 0
and Θ − ΨT2 ETZ2EΨ2 < 0 is equivalent to (10). Hence,
there exists a scalar α > 0 such that
ΔV (k) ≤ −α‖xxx(k)‖2 (13)
which implies that the system (1) is stable. �
3 Numerical example
Consider discrete singular time delay system (1) with
E =
[1 00 0
], A =
[0.8 00.05 0.9
], Ad =
[−0.1 0−0.2 −0.1
]
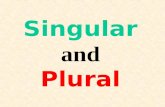
Using the methods of [20−22] and the results reported inthis paper, the allowable maximum values of d2 with var-ious d1 ensuring the regularity, causality, and stability ofsystem (1) are presented in Table 1, which shows our con-ditions give better results than those in [20−22] and Theo-rem 2 has less conservatism than Theorem 1. In addition,the stability criteria proposed by [13−19] are invalid for theabove-mentioned system. Fig. 1 gives the simulation resultsof x1(k) and x2(k) when d(k) = 10 + 6 sin(kπ/2) and the
initial function is φφφ(k) =
[4
0.75
], k ∈ [−16, 0]. From Fig. 1,
we can see that the states x1(k) and x2(k) asymptoticallyconverge to zero.
Fig. 1 State responses of the discrete singular timedelay system (1)
Table 1 Comparison of the allowable maximum values ofd2 for various d1
d1 0 3 6 9 12 15
Method of [20] 7 8 10 13 15 18
Method of [21] 12 14 14 15 17 20
Method of [22] 12 13 14 15 17 20
Theorem 1 13 15 18 20 23 26
Theorem 2 15 16 19 22 25 28
4 Conclusion
In this paper, the delay-dependent stability problem ofdiscrete singular systems with time-varying delay is inves-tigated. In terms of LMI approach, several new delay-dependent criteria are derived ensuring the considered sys-tem to be regular, causal, and stable without resortingto the decomposition and equivalent transformation of theconsidered system. The newly obtained results are less con-servative than the existing ones. A numerical example isgiven to illustrate the effectiveness of the presented criteriaand their improvement over the existing results.
References
1 Dai L. Singular Control Systems. New York: Springer, 1989
2 Xu S Y, Lam J. Robust Control and Filtering of SingularSystems. Berlin: Springer, 2006
3 Xu S Y, Van Dooren P, Stefan R, Lam J. Robust stabil-ity and stabilization for singular systems with state delayand parameter uncertainty. IEEE Transactions on Auto-matic Control, 2002, 47(7): 1122−1128
4 Yue D, Han Q L. Delay-dependent robust H∞ controllerdesign for uncertain descriptor systems with time-varyingdiscrete and distributed delays. IEE Proceedings — ControlTheory and Applications, 2005, 152(6): 628−638
5 Yang F, Zhang Q L. Delay-dependent H∞ control for lineardescriptor systems with delay in state. Journal of ControlTheory and Applications, 2005, 3(1): 76−84
6 Zhu S, Zhang C, Cheng Z, Feng J. Delay-dependent robuststability criteria for two classes of uncertain singular time-delay systems. IEEE Transactions on Automatic Control,2007, 52(5): 880−885
7 Wu Z, Zhou W. Delay-dependent robust H∞ control for un-certain singular time-delay systems. IET Control Theory andApplications, 2007, 1(5): 1234−1241
8 Xu S Y, Lam J, Zou Y. An improved characterization ofbounded realness for singular delay systems and its applica-tions. International Journal of Robust and Nonlinear Con-trol, 2008, 18(3): 263−277
9 Wang H, Xue A K, Lu R Q. Absolute stability criteria for aclass of nonlinear singular systems with time delay. NonlinearAnalysis: Theory, Methods and Applications, 2009, 70(2):621−630
10 Lu R Q, Dai X, Su H Y, Chu J, Xue A K. Delay-dependantrobust stability and stabilization conditions for a class ofLur′e singular time-delay systems. Asian Journal of Control,2008, 10(4): 462−469
11 Du Z, Zhang Q L, Liu L. Delay-dependent stabilization ofuncertain singular systems with multiple state delays. Inter-national Journal of Innovative Computing, Information andControl, 2009, 5(6): 1655−1664
12 Xie Y, Gui W, Jiang Z. Delay-dependent stabilization ofsingular systems with multiple internal and external incom-mensurate constant point delays. International Journal ofControl, Automation, and Systems, 2008, 6(4): 515−525
13 Ji X, Su H Y, Chu J. An LMI approach to robust stabil-ity of uncertain discrete singular time-delay systems. AsianJournal of Control, 2006, 8(1): 56−62
14 Mahmoud M S, Ismail A. Uncertain discrete delay singu-lar systems: delay-dependent stability and stabilization. Ap-plied Mathematical Sciences, 2007, 1(10): 491−505

No. 5 FANG Mei: Delay-dependent Stability Analysis for Systems with Discrete Singular Systems with · · · 755
15 Wu Z, Su H Y, Chu J. Robust stabilization for uncertain dis-crete singular systems with state delay. International Journalof Robust and Nonlinear Control, 2008, 18(16): 1532−1550
16 Ma S, Zheng C, Cheng Z. Delay-dependent robust H∞ con-trol for uncertain discrete-time singular systems with time-delays. Journal of Computational and Applied Mathematics,2008, 217(1): 194−211
17 Pan S, Chen C. The robust D-stability analysis of un-certain discrete-delay descriptor systems via genetic algo-rithms. International Journal of General Systems, 2008,37(3): 305−317
18 Ma S, Zheng C, Cheng Z. Delay-dependent robust stabilityand stabilization for uncertain discrete singular systems withdelays. Asian Journal of Control, 2009, 11(3): 309−318
19 Chen N, Zhai G, Gui W. Robust decentralized H∞ controlof multi-channel discrete-time descriptor systems with time-delay. International Journal of Innovative Computing, Infor-mation and Control, 2009, 5(4): 971−979
20 Ma S, Cheng Z, Zheng C. Delay-dependent robust stabilityand stabilisation for uncertain discrete singular systems withtime-varying delays. IET Control Theory and Applications,2007, 1(4): 1086−1095
21 Wang H, Xue A K, Lu R Q, Chen Y. Delay-dependent robustH∞ control for uncertain discrete singular time-varying de-lay systems based on a finite sum inequality. In: Proceedings
of the 26th Chinese Control Conference. Zhangjiajie, China:IEEE, 2007. 595−599
22 Du Z, Qiu Z, Zhang Q L, Liu L. New delay-dependent robuststability of discrete singular systems with time-varying delay.In: Proceedings of the 7th World Congress on IntelligentControl and Automation. Chongqing, China: IEEE, 2008.6359−6364
23 Wu M, He Y, She J H, Liu G P. Delay-dependent criteria forrobust stability of time-varying delay systems. Automatica,2004, 40(8): 1435−1439
24 He Y, Wang Q, Lin C. An improved H∞ filter design for sys-tems with time-varying interval delay. IEEE Transactions onCircuits and Systems, Part II: Express Briefs, 2006, 53(11):1235−1239
25 He Y, Wu M, Liu G P, She J. Output feedback stabiliza-tion for a discrete-time system with a time-varying delay.IEEE Transactions on Automatic Control, 2008, 53(10):2372−2377
FANG Mei Received her M. S. degree from Zhejiang NormalUniversity in 2007. Her research interest covers robust control,time-delay systems, and singular systems.E-mail: [email protected]