Deep Metric Learning With Angular Loss - CVF Open Access
9
Deep Metric Learning with Angular Loss Jian Wang, Feng Zhou, Shilei Wen, Xiao Liu and Yuanqing Lin Baidu Research {wangjian33,zhoufeng09,wenshilei,liuxiao12,linyuanqing}@baidu.com Abstract The modern image search system requires semantic un- derstanding of image, and a key yet under-addressed prob- lem is to learn a good metric for measuring the similarity between images. While deep metric learning has yielded impressive performance gains by extracting high level ab- stractions from image data, a proper objective loss function becomes the central issue to boost the performance. In this paper, we propose a novel angular loss, which takes an- gle relationship into account, for learning better similarity metric. Whereas previous metric learning methods focus on optimizing the similarity (contrastive loss) or relative sim- ilarity (triplet loss) of image pairs, our proposed method aims at constraining the angle at the negative point of triplet triangles. Several favorable properties are observed when compared with conventional methods. First, scale invari- ance is introduced, improving the robustness of objective against feature variance. Second, a third-order geometric constraint is inherently imposed, capturing additional local structure of triplet triangles than contrastive loss or triplet loss. Third, better convergence has been demonstrated by experiments on three publicly available datasets. 1. Introduction Metric learning for computer vision aims at finding ap- propriate similarity measurements between pairs of images that preserve desired distance structure. A good similarity can improve the performance of image search, particularly when the number of categories is very large [2] or unknown. Classical metric learning methods studied the case of find- ing a better Mahalanobis distance in linear space. However, linear transformation has a limited number of parameters and cannot model high-order correlations between the orig- inal data dimensions. With the ability of directly learning non-linear feature representation, deep metric learning has achieved promising results on various tasks, such as visual product search [1, 20, 17], face recognition [6, 30, 24], fea- ture matching [7], fine-grained image classification [33, 38], zero-shot learning [11, 35] and collaborative filtering [13]. Volvo C30 Hatchback Ford Ranger SuperCab Volvo C30 Hatchback Ford Ranger SuperCab GMC Canyon Extended Cab Ford Edge SUV Anchor Positive Negative Figure 1. Example of feature embedding computed by t-SNE [32] for the Stanford car dataset [18], where the images of Ford Ranger SuperCab (right) have a more diverse distribution than Volvo C30 Hatchback (left). Conventional triplet loss has difficulty in dealing with such unbalanced intra-class variation. The proposed angular loss addresses this issue by minimizing the scale-invariant angle at the negative point. Despite the various forms, the major work of deep met- ric learning can be categorized as minimizing either the contrastive loss (a.k.a., Siamese network) [6] or the triplet loss [34, 5]. However, it has been widely noticed that di- rectly optimizing distance-based objectives in deep learn- ing framework is difficult, requiring many practical tricks, such as multi-task learning [1, 38] or hard negative min- ing [33, 8]. Recent work including the lifted structure [26] and the N-pair loss [25] proposed to more effectively mine relations among samples within a mini-batch. Neverthe- less, all of these works rely on certain distance measure- ment between pairs of similar and dis-similar images. We hypothesize that the difficulty of training deep metric learn- ing also comes from the limitation by defining the objective only in distance. First, distance metric is sensitive to scale change. Traditional triplet loss constrains the distance gap between dis-similar clusters. However, it is inappropriate to choose the same absolute margin for clusters in different scales of intra-class variation. For instance, Fig. 1 shows the t-SNE [32] feature embedding of Stanford car dataset [18], where the sample distribution of Ford Ranger SuperCabs 2593
Transcript of Deep Metric Learning With Angular Loss - CVF Open Access

Deep Metric Learning with Angular Loss
Jian Wang, Feng Zhou, Shilei Wen, Xiao Liu and Yuanqing Lin
Baidu Research
{wangjian33,zhoufeng09,wenshilei,liuxiao12,linyuanqing}@baidu.com
Abstract
The modern image search system requires semantic un-
derstanding of image, and a key yet under-addressed prob-
lem is to learn a good metric for measuring the similarity
between images. While deep metric learning has yielded
impressive performance gains by extracting high level ab-
stractions from image data, a proper objective loss function
becomes the central issue to boost the performance. In this
paper, we propose a novel angular loss, which takes an-
gle relationship into account, for learning better similarity
metric. Whereas previous metric learning methods focus on
optimizing the similarity (contrastive loss) or relative sim-
ilarity (triplet loss) of image pairs, our proposed method
aims at constraining the angle at the negative point of triplet
triangles. Several favorable properties are observed when
compared with conventional methods. First, scale invari-
ance is introduced, improving the robustness of objective
against feature variance. Second, a third-order geometric
constraint is inherently imposed, capturing additional local
structure of triplet triangles than contrastive loss or triplet
loss. Third, better convergence has been demonstrated by
experiments on three publicly available datasets.
1. Introduction
Metric learning for computer vision aims at finding ap-
propriate similarity measurements between pairs of images
that preserve desired distance structure. A good similarity
can improve the performance of image search, particularly
when the number of categories is very large [2] or unknown.
Classical metric learning methods studied the case of find-
ing a better Mahalanobis distance in linear space. However,
linear transformation has a limited number of parameters
and cannot model high-order correlations between the orig-
inal data dimensions. With the ability of directly learning
non-linear feature representation, deep metric learning has
achieved promising results on various tasks, such as visual
product search [1, 20, 17], face recognition [6, 30, 24], fea-
ture matching [7], fine-grained image classification [33, 38],
zero-shot learning [11, 35] and collaborative filtering [13].
Volvo C30 Hatchback
Ford Ranger SuperCab
Volvo C30 Hatchback
Ford Ranger SuperCab
GMC Canyon Extended Cab
Ford Edge SUV
Anchor
Positive
Negative
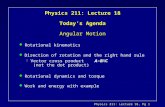
Figure 1. Example of feature embedding computed by t-SNE [32]
for the Stanford car dataset [18], where the images of Ford Ranger
SuperCab (right) have a more diverse distribution than Volvo C30
Hatchback (left). Conventional triplet loss has difficulty in dealing
with such unbalanced intra-class variation. The proposed angular
loss addresses this issue by minimizing the scale-invariant angle at
the negative point.
Despite the various forms, the major work of deep met-
ric learning can be categorized as minimizing either the
contrastive loss (a.k.a., Siamese network) [6] or the triplet
loss [34, 5]. However, it has been widely noticed that di-
rectly optimizing distance-based objectives in deep learn-
ing framework is difficult, requiring many practical tricks,
such as multi-task learning [1, 38] or hard negative min-
ing [33, 8]. Recent work including the lifted structure [26]
and the N-pair loss [25] proposed to more effectively mine
relations among samples within a mini-batch. Neverthe-
less, all of these works rely on certain distance measure-
ment between pairs of similar and dis-similar images. We
hypothesize that the difficulty of training deep metric learn-
ing also comes from the limitation by defining the objective
only in distance. First, distance metric is sensitive to scale
change. Traditional triplet loss constrains the distance gap
between dis-similar clusters. However, it is inappropriate
to choose the same absolute margin for clusters in different
scales of intra-class variation. For instance, Fig. 1 shows the
t-SNE [32] feature embedding of Stanford car dataset [18],
where the sample distribution of Ford Ranger SuperCabs
43212593

is much more diverse than Volvo C30 Hatchback. Second,
distance only considers second-order information between
samples. Optimizing distance-based objectives in stochas-
tic training leads to sub-optimal convergence in high-order
solution space.
To circumvent these issues, we propose a novel angu-
lar loss to augment conventional distance metric learning.
The main idea is to encode the third-order relation inside
triplet in terms of the angle at the negative point. By con-
straining the upper bound of the angle, our method pushes
the negative point away from the center of positive clus-
ter, and drags the positive points closer to each other. Our
idea is analogous to the usage of high-order information for
augmenting pair-wise constraints in the domain of graph
matching [9] and Markov random fields [10]. To the best
of our knowledge, this is the first work to explore angular
constraints in deep metric learning. In particular, the pro-
posed angular loss improves traditional distance-based loss
in two aspects. First, compared to distance-based metric,
angle is not only rotation-invariant but also scale-invariant
by nature. This renders the objective more robust against
the variation of local feature map. For instance, the two
triplets shown in Fig. 1 are quite different in their scales.
It is more reasonable to constrain the angle that is pro-
portional to the relative ratio between Euclidean distances.
Second, angle defines the third-order triangulation among
three points. Given the same triplet, angular loss describes
its local structure more precisely than distance-based triplet
loss. Our idea is general and can be potentially combined
with existing metric learning frameworks. The experimen-
tal study shows it achieves substantial improvement over
state-of-the-arts methods on several benchmark datasets.
2. Related work
Metric learning has been a long-standing problem in ma-
chine learning and computer vision. The simplest form of
metric learning may be considered as learning the Maha-
lanobis distance between pairs of points. It has a deep con-
nection with classical dimension reduction methods such as
PCA, LLE and clustering problems but in a discriminative
setting. An exhaustive review of previous work is beyond
the scope of this paper. We refer to the survey of Kulis et
al. [19] on early works of metric learning. Here we focus
on the two main streams in deep metric learning, contrastive
embedding and triplet embedding, and their recent variants
used in computer vision.
The seminal work of Siamese network [4] consists of
two identical sub-networks that learn contrastive embed-
ding from a pair of samples. The distance between a pos-
itive pair is minimized and small distance between a nega-
tive pair is penalized, such that the derived distance metric
should be smaller for pairs from the same class, and larger
for pairs from different classes. It was originally designed
for signature verification [4], but gained a lot of attention
recently due to its superior performance in face verifica-
tion [6, 30, 28, 36].
Despite its great success, contrastive embedding requires
that training data contains real-valued precise pair-wise
similarities or distances, which is usually not available in
practice. To address this issue, triplet embedding [23] is
proposed to explore the relative similarity of different pairs
and it has been widely used in image retrieval [33, 5] and
face recognition [24]. A triplet is made up of three samples
from two different classes, that jointly constitute a positive
pair and a negative pair. The positive pair distance is en-
couraged to be smaller than the negative pair distance, and
a soft nearest neighbor classification margin is maximized
by optimizing a hinge loss.
Compared to softmax loss, it has been shown that
Siamese network or triplet loss is much more difficult to
train in practice. To make learning more effective and effi-
cient, hard sample mining which only focuses on a subset
of samples that are considered hard is usually employed.
For instance, FaceNet [24] suggested an online strategy by
associating each positive pair in the minibatch with a semi-
hard negative example. Wang et al. [33] designed a more
effective sampling strategy to draw out-class and in-class
negative images to avoid overfitting for training triplet loss.
To more effectively bootstrap a large flower dataset, Cui
et al. [8] utilized the hard negative images labeled by hu-
mans, which are often neglected in traditional dataset con-
struction. Huang et al. [14] introduced a position-dependent
deep metric unit, which can be used to select hard samples
to guide the deep embedding learning in an online and ro-
bust manner. More recently, Yuan et al. [37] proposed a
cascade framework that can mine hard examples with in-
creasing complexities.
Recently, there are also some works on designing new
loss functions for deep metric embedding. A simple yet
effective way is to jointly train embedding loss with clas-
sification loss. With additional supervision, the improve-
ment of triplet loss has been evidenced in face verifica-
tion [28], fine-grained object recognition [38] and product
search problems [1]. However, these methods still suffer
from the limitation of the conventional sampling that fo-
cuses only on the relation within each triplet. To fix this is-
sue, Song et al. [26] proposed the lifted structure to enable
updating dense pair combinations in the mini-batch. Sohn
[25] further extended the triplet loss into N-pair loss, which
significantly improves upon the triplet loss by pushing away
multiple negative examples jointly at each update. In addi-
tion to these efforts that only explore local relation inside
each mini-batch, another direction of work is designed to
optimize clustering-like metric that is aware of the global
structure of all training data. Early methods such as neigh-
borhood components analysis (NCA) [12, 23] can directly
43222594

optimize leave-one-out nearest-neighbor classification loss.
When applied to mini-batch training, however, NCA is lim-
ited as it requires to see the entire training data in each iter-
ation. Rippel et al. [21] improved NCA by maintaining an
model of the distributions of the different classes in feature
space. The class distribution overlap is then penalized to
achieve discrimination. More recently, Song et al. [27] pro-
posed a new metric learning framework which encourages
the network to learn an embedding function that directly op-
timizes a clustering quality metric. Nevertheless, all above-
mentioned losses are defined in term of distances of points,
and very few [31] has considered other possible forms of
loss. Our work re-defines the core component of metric
learning loss using angle instead of distance, and we show
it can be easily adapted into existing architectures such as
N-pair loss to further improve their performance.
3. Proposed method
In this section, we present a novel angular loss to aug-
ment conventional deep metric learning. We first review the
conventional triplet loss in its mathematical form. We then
derive the angular loss by constructing a stable triplet trian-
gle. Finally, we detail the optimization of the angular loss
on a mini-batch.
3.1. Review of triplet loss
Suppose that we are given a set of training images
{(x, y), · · · } of K classes, where x 2 RD denotes the fea-
ture embedding of each sample extracted by CNN and y 2{1, · · · ,K} its label. At each training iteration, we sample
a mini-batch of triplets, each of which T = (xa,xp,xn)consists of an anchor point xa, associated with a pair of
positive xp and negative xn samples, whose labels satisfy
ya = yp 6= yn. The goal of triplet loss is to push away the
negative point xn from the anchor xa by a distance margin
m > 0 compared to the positive xp:
kxa − xpk2 +m kxa − xnk
2. (1)
For instance, as shown in Fig. 2, we expect the anchor xa to
stay closer to the positive xp compared to the negative xn.
To enforce this constraint, a common relaxation of Eq. 1 is
the minimization of the following hinge loss,
ltri(T ) =h
kxa − xpk2 − kxa − xnk
2 +mi
+, (2)
where the operator [·]+ = max(0, ·) denotes the hinge func-
tion. It is worth mentioning that the feature map often needs
to be normalized to have unit length, i.e., kxk = 1, in or-
der to be robust to the variation in image illumination and
contrast.
Figure 2. Illustration of the triplet loss and its gradient on a syn-
thetic example.
To optimize Eq. 2, we can calculate its gradient with re-
spect to the three samples of triplet respectively as
∂ltri(T )
∂xn
= 2(xa − xn), (3)
∂ltri(T )
∂xp
= 2(xp − xa),
∂ltri(T )
∂xa
= 2(xn − xp),
if the constraint (Eq. 1) is violated, or zero otherwise.
It is widely observed that stochastic gradient descent
converges poorly on optimizing the triplet loss. There are
a few reasons contributing to this difficulty: First, it is im-
practical to enumerate all possible triplets due to the cubic
sampling size. Therefore, it calls for an effective sampling
strategy to ensure the triplet quality and learning efficiency.
Second, the goal of the objective (Eq. 2) is to separate clus-
ters by a distance margin m. However, it is inappropriate to
apply the single global margin m on the inter-class gap as
the intra-class distance can vary dramatically in real-world
tasks. Third, the gradient (Eq. 3) derived for each point only
takes its pair-wise relation with the second point, but fails
to consider the interaction with the third point. Consider
the negative point xn in Fig. 2 for an example. Its gradient
2(xa − xn) may not be optimal without the guarantee of
moving away from the class which both the anchor xa and
positive sample xp belong to.
3.2. Angular loss
To alleviate the problems elaborated above, a variety of
techniques [1, 38, 33, 8, 26, 25] have been proposed in the
last few years. However, the fundamental component in the
loss definition, i.e., the pair-wise distance between points,
has rarely been changed. Instead, this section introduces an
angular loss that leads to a novel solution to improve deep
metric learning.
Let’s first consider the triplet example shown in Fig. 3a,
where the triplet T = (xa,xp,xn) forms the triangle
43232595

4apn, whose edges are denoted as ean = xa − xn,
epn = xp−xn and eap = xa−xp respectively. The original
triplet constraint (Eq. 1) penalizes a longer edge ean com-
pared to the one eap on the bottom. Because the anchor and
positive samples share the same label, we can derive a sym-
metrical triplet constraint that enforces keapk+m kepnk.
According to the cosine rule, it can be proved that the angle
∠n surrounded by the longer edges ean and epn has to be
the smallest one, i.e., ∠n min(∠a,∠p). Furthermore,
because ∠n+∠a+∠p = 180◦, ∠n has to be less than 60◦.
This fact motivates us to constrain the upper bound of ∠nfor each triplet triangle,
∠n α, (4)
where α > 0 is a pre-defined parameter. Intuitively, this
constraint selects the triplet that forms a skinny triangle
whose shortest edge eap connects nodes of the same class.
Compared to the traditional constraint (Eq. 1) that is de-
fined on the absolute distance between points, the pro-
posed angular constraint offers three advantages: 1) An-
gle is a similarity-transform-invariant metric, proportional
to the relative comparison of triangle edges. With a fixed
margin α, Eq. 4 always holds for any re-scaling of the local
feature map. 2) The cosine rule determines the calculation
of ∠n involves all the three edges of the triangle. In con-
trast, the original triplet only takes two edges into account.
The additional constraint improves the robustness and ef-
fectiveness of the optimization. 3) In the original triplet
constraint (Eq. 1), it is difficult to choose a proper distance
margin m without meaningful reference. By comparison,
setting α in the angular constraint is an easier task because
it has concrete and interpretable meaning in geometry.
However, a straightforward implementation of Eq. 4 be-
comes unstable in some special case. Consider the triangle
shown in Fig. 3a, where ∠a > 90◦. By enforcing Eq. 4
to reduce ∠n, the negative point xn would be potentially
dragged towards x0n, which is closer to the anchor point
xa. This result contradicts our original goal of enlarging the
distance between points of different classes. To fix this is-
sue, we re-construct the triplet triangle to make Eq. 4 more
stable. Our intuition is to model the relation between the
negative xn with the local sample distribution defined by
the anchor xa and the positive xp, shown in Fig. 3b. A
natural approximation to this distribution is the circumcir-
cle C passing through xa and xp, centered at the middle
xc = (xa + xp)/2. We then introduce a hyper-plane P ,
which is perpendicular to the edge enc = xn−xc at xc. The
hyper-plane P intersects the circumcircle C at two nodes,
one of which is denoted as xm. Based on these auxiliary
structures, we define the new triangle 4mcn by shifting the
anchor xa and positive xp to xc and xm respectively. Given
the new triangle, we re-formulate Eq. 4 to constrain the an-
gle ∠n0 closed by the edge of enc and enm to be less than a
(a) (b)
Figure 3. Illustration of the angular constraint on a synthetic triplet
where ∠a > 90◦. (a) Directly minimizing ∠n is unstable as it
would drag xn closer to xa. (b) The more stable ∠n0 defined by
re-constructing the triangle 4mcn.
pre-define upper bound α, i.e.,
tan∠n0 =kxm − xck
kxn − xck=
kxa − xpk
2kxn − xck tanα, (5)
where kxm −xck is the radius of the circumcircle C, which
equals to kxa − xpk/2.
Inspired by the triplet loss (Eq. 2), we seek for the opti-
mum embedding such that the samples of different classes
can be separated well as the angular constraint (Eq. 5) de-
scribes. In a nutshell, our angular loss consists of minimiz-
ing the following hinge loss,
lang(T ) =h
kxa − xpk2 − 4 tan2 αkxn − xck
2i
+. (6)
To better understand the effect of optimizing the angular
loss, we can investigate the gradient of lang with respect to
xa, xp and xn, which are
∂lang(T )
∂xa
= 2(xa − xp)− 2 tan2 α(xa + xp − 2xn),
∂lang(T )
∂xp
= 2(xp − xa)− 2 tan2 α(xa + xp − 2xn),
∂lang(T )
∂xn
= 4 tan2 αh
(xa + xp)− 2xn
i
, (7)
if ∠n0 is larger than α, or zero otherwise. As illustrated
in Fig. 3b, the gradient pushes the negative point xn away
43242596

(a) (b)
Figure 4. Comparison between different sampling methods. For
each node, we use color to indicate the class label and shape for
its role (i.e., anchor, positive or negative) in triplet. (a) Traditional
triplet sampling. (b) N-pair sampling. To keep plot clean, we only
show the connection inside one tuplet.
from xc, the center of local cluster defined by xa and xp.
In addition, the anchor xa and the positive xp are dragged
towards each other. Compared to the original triplet loss
whose gradients (Eq. 3) only depend on two points, the gra-
dients in Eq. 7 are much more robust as they consider all the
three points simultaneously.
3.3. Implementation details
Eq. 6 defines the angular loss on a triplet. When opti-
mizing a mini-batch containing multiple triplets, we found
our method can be further improved in two ways.
First, we enhance the mini-batch optimization by making
the full use of the batch. As illustrated in Fig. 4a, the con-
ventional sample strategy constructs a mini-batch as multi-
ple disjoint triplets without interaction among them. This
poses a large bottleneck in optimization as it can only en-
code a limited amount of information. To allow joint com-
parison among all samples in the batch, we follow the sam-
pling strategy proposed in N-pair loss [25] to construct tu-
plets with multiple negative points. More concretely, we
first draw N/2 different classes, from each of which we
then randomly sample two training images. The main bene-
fit behind N-pair sampling is that it can avoid the quadratic
possible combinations of tuplets. For instance, as shown in
Fig. 4b, given a batch with N samples B = {xi, yi}Ni=1,
there are in total N tuplets, each of which is composed by
a pair of anchor xa 2 B and positive xp 2 B of the same
class, and N − 2 negative from other classes.
Second, a direct extension of Eq. 6 to consider more than
one negative point would result in a very non-smooth ob-
jective function. Inspired by recent work [26, 25, 27], we
replace the original hinge loss with its smooth upper bound,
i.e., log(exp(y1) + exp(y2)) ≥ max(y1, y2). By assuming
feature is of unit length (i.e., kxk = 1) in Eq. 6, we derive
the angular loss for a batch B using the following log-sum-
exp formulation:
lang(B) =1
N
X
xa2B
⇢
log
1 +X
xn2Byn 6=ya,yp
exp(
fa,p,n)
]}
,
(8)
where in fa,p,n, we drop the constant terms depending on
the value of kxk in a similar spirit to N-pair loss [25], i.e.,
fa,p,n = 4 tan2 α(xa + xp)Txn − 2(1 + tan2 α)xT
a xp.
Our work on angular loss explores the third-order rela-
tions beyond the scope of the well-studied pair-wise dis-
tance. Due to its flexibility and generality, we can eas-
ily combine the angular constraint with traditional distance
metric loss to boost the overall performance. As an exam-
ple, we mainly investigate the combination with the N-pair
loss [25], one of the latest work for deep metric learning,
lnpair&ang(B) = lnpair(B) + λlang(B), (9)
where lnpair(B) denotes the original N-pair loss as,
lnpair(B) =1
N
X
xa2B
⇢
log
1+
X
xn2Byn 6=ya,yp
exp(
xTa xn − x
Ta xp
)
]}
, (10)
and λ is a trade-off weight between N-pair and the angular
loss. In all experiments, we always set λ = 2 as it consis-
tently yields promising result.
4. Experiments
In this section, we evaluate deep metric learning algo-
rithms on both image retrieval and clustering tasks. Our
method has been shown to achieve state-of-the-art perfor-
mance on three public benchmark datasets.
4.1. Benchmark datasets
We conduct our experiments on three public benchmark
datasets. For all datasets, we follow the conventional proto-
col of splitting training and testing:
CUB-200-2011 [3] dataset has 200 species of birds with
11,788 images included, where the first 100 species (5,864
images) are used for training and the remaining 100 species
(5,924 images) are used for testing.
Stanford Car [18] dataset is composed by 16,185 cars
images of 196 classes. We use the first 98 classes (8,054
images) for training and the other 98 classes (8,131 images)
for testing.
Online Products [26] dataset contains 22,634 classes
with 120,053 product images in total, where the first 11,318
classes (59,551 images) are used for training and the rest
classes (60,502 images) are used for testing.
43252597

4.2. Baselines
In order to evaluate the superiority of the proposed
method, we compare with three baselines:
Triplet Loss: We implement the standard triplet em-
bedding by optimizing Eq. 2. To be fair in comparison,
we apply triplet loss embedding with two sampling strate-
gies. Following the most standard setting, the mini-batch of
Triplet-I (T-I) was constructed by sampling disjoint triplets
as illustrated in Fig. 4a. In the second case of Triplet-II (T-
II), we optimize Eq. 2 using the N-pair sampling as shown
in Fig. 4b to keep consistent with the angular loss.
Lifted Structure (LS) [26]: We adopt the open-source
code from the authors’ website with the default parameters
used in the paper.
N-pair Loss (NL) [25]: We implement N-pair loss
(Eq. 10) closely following the illustration of the paper. We
found our implementation achieved similar results as re-
ported in the paper.
For our method, we implement two versions, Angular
Loss (AL) and N-pair & Angular Loss (NL&AL), that
optimize Eq. 8 and Eq. 9 respectively. To be comparable
with prior work, we employ the N-pair sampling (Fig. 4b)
shared by the baselines of Triplet-II and N-pair Loss.
As the focus of this work is the similarity measure, we
did not employ any hard negative mining strategies to com-
plicate the comparison. But it is worth mentioning that our
work can be easily combined with any hard negative mining
method.
4.3. Evaluation metrics
Following the standard protocol used in [26, 25], we
evaluate the performance of different methods in both re-
trieval and clustering tasks. We split each dataset into two
sets of disjoint classes, one for training and the other for
testing the retrieval and clustering performance of the un-
seen classes. For retrieval task, we calculate the percentage
of the testing examples whose R nearest neighbors contain
at least one example of the same class. This quantity is also
known as Recall@R, the defacto metric [15] for image re-
trieving evaluation. For clustering evaluation, we adopt the
code from [26] by clustering testing examples using the k-
means algorithm. The quality of clustering is reported in
terms of the standard F1 and NMI metrics. See [26] for
their detailed definition.
4.4. Training setup
The Caffe package [16] is used throughout the experi-
ments. All images are normalized to 256-by-256 before fur-
ther processing. The embedding size is set to D = 512 for
all embedding vectors, and no normalization is conducted
before computing loss. We omit the comparison on different
embedding sizes as the performance change is minor. This
fact is also evidenced in [26]. GoogLeNet [29] pretrained
on ImageNet ILSVRC dataset [22] is used for initialization
and a randomly initialized fully connected layer is added.
The new layer is optimized with 10 times larger learning
rate than the other layers. We fix the base learning rate to
10−4 for all datasets except for the CUB-200-2011 dataset,
for which we use a smaller rate 10−5 as it has fewer images
and is more likely to meet the overfitting problem. We use
SGD with 20k training iterations and 128 mini-batch size.
Standard random crop and random horizontal mirroring are
used for data augmentation. Notice that our method incurs
negligible computational cost compared to traditional triplet
loss. Therefore, the training time is almost same as other
baselines.
4.5. Result analysis
Tables 1, 2 and 3 compare our method with all baselines
in both clustering and retrieval tasks. These tables show that
the two recent baselines, lifted structure (LS) [26] and N-
pair loss (NL) [25], can always improve the standard triplet
loss (T-I and T-II). In particular, N-pair achieves a larger
margin in improvement because of the advance in its loss
design and batch construction. Compared to previous work,
the proposed angular loss (AL) consistently achieves bet-
ter results on all three benchmark datasets. It is important
to notice that the proposed angular loss (AL) employs the
same sampling strategies as triplet loss (T-II) and N-pair
loss (NL). This clearly indicates the superiority of the new
loss for solving deep metric learning problem. By integrat-
ing with the original N-pair loss, the joint optimization of
angular loss in NL&AL can lead to the best performance
among all the methods in all metrics.
Fig. 5 compares NL&AL with N-pair loss on the task
of image retrieval. As it can be observed, the proposed
NL&AL learns a more discriminative feature that helps in
identifying the correct images especially when the intra-
class variance is large. For example, given a query image
of FIAT 500 Convertible 2012 at the fourth row of Fig. 5 on
the right side, the top-5 images retrieved by NL&AL con-
tain four successful matches that belong to the same class
as the query, while N-pair method fails to identify them.
In addition, Fig. 6 visualizes the feature embedding com-
puted by our method (NL&AL) in 2-D using t-SNE [32].
We highlight several representative classes by enlarging the
corresponding regions in the corners. Despite the large pose
and appearance variation, our method effectively generates
a compact feature mapping that preserves semantic similar-
ity.
A key parameter of our method is the margin α, that de-
termines to what degree the constraint (Eq. 5) would be ac-
tivated. Table 4 and Table 5 study the impact of choosing
different α for the retrieval task on the Stanford car and on-
line product datasets, respectively. Choosing α = 45◦ for
Stanford car and α = 36◦ for online product lead to the
43262598

MethodClustering (%) Recall@R (%)
NMI F1 R=1 R=2 R=4 R=8
T-I 53.7 19.7 42.2 54.4 66.2 76.7T-II 54.1 20.0 42.8 54.9 66.2 77.6LS 56.2 22.7 46.5 58.1 69.8 80.2NL 60.2 28.2 51.9 64.3 74.9 83.2AL 61.0 30.2 53.6 65.0 75.3 83.7NL&AL 61.1 29.4 54.7 66.3 76.0 83.9
Table 1. Comparison of clustering and retrieval on the CUB-200-
2011 [3] dataset.
MethodClustering (%) Recall@R (%)
NMI F1 R=1 R=2 R=4 R=8
T-I 53.8 18.7 45.5 59.0 71.0 80.8T-II 54.3 19.6 46.3 59.9 71.4 81.3LS 55.1 21.5 48.3 61.1 71.8 81.1NL 62.7 31.8 68.9 78.9 85.8 90.9AL 62.4 31.8 71.3 80.7 87.0 91.8NL&AL 63.2 32.2 71.4 81.4 87.5 92.1
Table 2. Comparison of clustering and retrieval on the Stanford
car [18] dataset.
MethodClustering (%) Recall@R (%)
NMI F1 R=1 R=10 R=100 R=1000
T-I 86.2 19.9 56.5 74.7 88.3 96.2T-II 86.4 21.0 58.1 76.0 89.1 96.4LS 87.4 24.7 63.0 80.5 91.7 97.5NL 87.7 26.3 66.9 83.0 92.3 97.7AL 87.8 26.5 67.9 83.2 92.2 97.7NL&AL 88.6 29.9 70.9 85.0 93.5 98.0
Table 3. Comparison of clustering and retrieval on the online prod-
ucts [26] dataset.
best performance for the method of NL&AL. We found that
our method performs consistently well in all three dataset
for 36◦ α 55◦. It deserves to be mentioned that, with-
out integrating with NL, AL preforms comparably with NL,
and even better when mining a proper value of α, which is
shown in Table 5.
5. Conclusion
In this paper, we propose a novel angular loss for deep
metric learning. Unlike most methods that formulate objec-
tive based on distance, we resort to constrain the angle of the
triplet triangle in the loss. Compared to pair-wise distance,
NL&AL(α)Recall@R (%)
R=1 R=2 R=4 R=8
α = 36◦ 69.9 79.7 86.8 91.8α = 42◦ 70.7 80.5 87.2 91.9α = 45◦ 71.4 81.4 87.5 92.1α = 48◦ 71.3 80.4 87.0 91.9α = 55◦ 69.0 78.1 85.3 90.8
Table 4. Comparison of different values for α for our method on
Stanford car dataset.
Method NL NL&AL(α = 45◦) NL&AL(α = 36◦)
Recall@1 (%) 66.9 69.2 70.9
Method NL AL(α = 45◦) AL(α = 36◦)
Recall@1 (%) 66.9 66.4 67.9
Table 5. Comparison of different values for α for our method on
the online product dataset.
angle is a rotation and scale invariant metric, rendering the
objective more robust against the large variation of feature
map in real data. In addition, the value of angle encodes the
triangular geometry of three points simultaneously. Given
the same triplet, it offers additional source of constraints
to ensure that dis-similar points can be separated. Further-
more, we show how the angular loss can be easily integrated
into other frameworks such as N-pair loss [25]. The supe-
riority of our method over existing state-of-the-art work is
verified on several benchmark datasets.
In the future, we hope to extend our work in two direc-
tions. First, our method origins from the triplet loss and
leverages the third-order relation among three points. It
is interesting to consider more general case with four or
more samples. Previous work [38, 14] studied the case of
quadruplet but still employed certain distance-based objec-
tives. One possible extension of our idea on quadruplet is to
construct a triangular pyramid and constrain the angle be-
tween the side edge and the plane on the bottom. Second,
it is beneficial to combine our method with other practical
tricks such as hard negative mining [37] or new clustering-
like frameworks [21, 27].
References
[1] S. Bell and K. Bala. Learning visual similarity for prod-
uct design with convolutional neural networks. ACM Trans.
Graph., 34(4):98:1–98:10, 2015.
[2] K. Bhatia, H. Jain, P. Kar, M. Varma, and P. Jain. Sparse
local embeddings for extreme multi-label classification. In
NIPS, pages 730–738, 2015.
[3] S. Branson, G. V. Horn, C. Wah, P. Perona, and S. Belongie.
The ignorant led by the blind: A hybrid human-machine vi-
43272599

Query Retrieval Query Retrieval
NL&AL
NL
NL
NL&AL
NL&AL
NL
NL&AL
NL
NL
NL&AL
NL&AL
NL
Figure 5. Comparison of queries and top-5 retrievals between N-pair (NP) and our method (NP&AL). From top to bottom, we plot two
examples for the CUB-200-2011, Stanford car and online products dataset respectively. The retrieved images pointed by an arrow are the
ones that belong to the same class as the query.
Figure 6. Visualization of feature embedding computed by our method (NP&AL) using t-SNE on the CUB-200-2011 dataset.
sion system for fine-grained categorization. Int. J. Comput.
Vis., 108(1-2):3–29, 2014.
[4] J. Bromley, I. Guyon, Y. LeCun, E. Sackinger, and R. Shah.
Signature verification using a Siamese time delay neural net-
work. In NIPS, 1993.
[5] G. Chechik, V. Sharma, U. Shalit, and S. Bengio. Large scale
online learning of image similarity through ranking. Journal
of Machine Learning Research, 11:1109–1135, 2010.
43282600

[6] S. Chopra, R. Hadsell, and Y. LeCun. Learning a similarity
metric discriminatively, with application to face verification.
In CVPR, 2005.
[7] C. B. Choy, J. Gwak, S. Savarese, and M. K. Chandraker.
Universal correspondence network. In NIPS, 2016.
[8] Y. Cui, F. Zhou, Y. Lin, and S. J. Belongie. Fine-grained
categorization and dataset bootstrapping using deep metric
learning with humans in the loop. In CVPR, 2016.
[9] O. Duchenne, F. R. Bach, I. Kweon, and J. Ponce. A tensor-
based algorithm for high-order graph matching. IEEE Trans.
Pattern Anal. Mach. Intell., 33(12):2383–2395, 2011.
[10] A. Fix, A. Gruber, E. Boros, and R. Zabih. A graph cut
algorithm for higher-order markov random fields. In ICCV,
pages 1020–1027, 2011.
[11] A. Frome, G. S. Corrado, J. Shlens, S. Bengio, J. Dean,
M. Ranzato, and T. Mikolov. DeViSE: A deep visual-
semantic embedding model. In NIPS, 2013.
[12] J. Goldberger, S. Roweis, G. Hinton, and R. Salakhutdinov.
Neighborhood components analysis. In NIPS, 2004.
[13] C.-K. Hsieh, L. Yang, Y. Cui, T.-Y. Lin, S. Belongie, and
D. Estrin. Collaborative metric learning. In WWW, 2017.
[14] C. Huang, C. C. Loy, and X. Tang. Local similarity-aware
deep feature embedding. In NIPS, pages 1262–1270, 2016.
[15] H. Jegou, M. Douze, and C. Schmid. Product quantiza-
tion for nearest neighbor search. IEEE Trans. Pattern Anal.
Mach. Intell., 33(1):117–128, 2011.
[16] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. B.
Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolu-
tional architecture for fast feature embedding. In ACM MM,
pages 675–678, 2014.
[17] M. H. Kiapour, X. Han, S. Lazebnik, A. C. Berg, and T. L.
Berg. Where to buy it: Matching street clothing photos in
online shops. In ICCV, 2015.
[18] J. Krause, M. Stark, J. Deng, and L. Fei-Fei. 3D object rep-
resentations for fine-grained categorization. In ICCV Work-
shop on 3D Representation and Recognition, 2013.
[19] B. Kulis. Metric learning: A survey. Foundations and Trends
in Machine Learning, 5(4):287–364, 2013.
[20] Y. Li, H. Su, C. R. Qi, N. Fish, D. Cohen-Or, and L. J.
Guibas. Joint embeddings of shapes and images via CNN im-
age purification. ACM Trans. Graph., 34(6):234:1–234:12,
2015.
[21] O. Rippel, M. Paluri, P. Dollar, and L. Bourdev. Metric learn-
ing with adaptive density discrimination. In CVPR, 2015.
[22] O. Russakovsky, J. Deng, H. Su, J. Krause, S. Satheesh,
S. Ma, Z. Huang, A. Karpathy, A. Khosla, M. S. Bernstein,
A. C. Berg, and F. Li. ImageNet large scale visual recog-
nition challenge. International Journal of Computer Vision,
115(3):211–252, 2015.
[23] R. Salakhutdinov and G. Hinton. Learning a nonlinear em-
bedding by preserving class neighbourhood structure. In
AISTATS, 2007.
[24] F. Schroff, D. Kalenichenko, and J. Philbin. FaceNet: A
unified embedding for face recognition and clustering. In
CVPR, 2015.
[25] K. Sohn. Improved deep metric learning with multi-class
N-pair loss objective. In NIPS, 2016.
[26] H. Song, Y. Xiang, S. Jegelka, and S. Savarese. Deep metric
learning via lifted structured feature embedding. In CVPR,
2016.
[27] H. O. Song, S. Jegelka, V. Rathod, and K. Murphy. Learn-
able structured clustering framework for deep metric learn-
ing. CoRR, abs/1612.01213, 2016.
[28] Y. Sun, Y. Chen, X. Wang, and X. Tang. Deep learning face
representation by joint identification-verification. In NIPS,
2014.
[29] C. Szegedy, W. Liu, Y. Jia, P. Sermanet, S. E. Reed,
D. Anguelov, D. Erhan, V. Vanhoucke, and A. Rabinovich.
Going deeper with convolutions. In CVPR, 2015.
[30] Y. Taigman, M. Yang, M. Ranzato, and L. Wolf. DeepFace:
Closing the gap to human-level performance in face verifica-
tion. In CVPR, 2014.
[31] E. Ustinova and V. S. Lempitsky. Learning deep embeddings
with histogram loss. In NIPS, pages 4170–4178, 2016.
[32] L. van der Maaten. Accelerating t-SNE using tree-
based algorithms. Journal of Machine Learning Research,
15(1):3221–3245, 2014.
[33] J. Wang, Y. Song, T. Leung, C. Rosenberg, J. Wang,
J. Philbin, B. Chen, and Y. Wu. Learning fine-grained im-
age similarity with deep ranking. In CVPR, 2014.
[34] K. Weinberger and L. Saul. Distance metric learning for
large margin nearest neighbor classification. Journal of Ma-
chine Learning Research, 10:207–244, 2009.
[35] J. Weston, S. Bengio, and N. Usunier. WSABIE: scaling up
to large vocabulary image annotation. In IJCAI, pages 2764–
2770, 2011.
[36] D. Yi, Z. Lei, and S. Z. Li. Deep metric learning for practical
person re-identification. CoRR, abs/1407.4979, 2014.
[37] Y. Yuan, K. Yang, and C. Zhang. Hard-aware deeply cas-
caded embedding. CoRR, abs/1611.05720, 2016.
[38] X. Zhang, F. Zhou, Y. Lin, and S. Zhang. Embedding label
structures for fine-grained feature representation. In CVPR,
2016.
43292601