Merrill Lynch, Pierce, Fenner & Smith Incorporated and Merrill Lynch ...

If you can't read please download the document
description
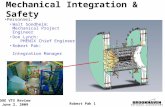
Decentralized Control of Mobile Sensor Networks Kevin M. Lynch Laboratory for Intelligent Mechanical Systems Mechanical Engineering Department Northwestern University Evanston, IL Northwestern University Chicago Evanston From Assembly to Self-Assembly Where is the assembly program and the power to execute it? traditional robot assembly self-assembly with external forcing formation control Centralized control Decentralized control programmable vector fields A Swarm of Pennies mobility from centralized control of environment From Assembly to Self-Assembly Where is the assembly program and the power to execute it? traditional robot assembly self-assembly with external forcing formation control Centralized control Decentralized control programmable vector fields Designing Parts for Assembly Micro-scale rods assembling into sheets and tubes (Mirkin et al.) Adding internal state to effect more complex assembly rules (Klavins et al.) Formation Control independent propulsion (Mondada et al.) Goal: Automatic Compilation of Emergent Behaviors into Local Controllers Motion Coordination formation control herding prey capture Cooperative Mobile Sensing environmental modeling cooperative target localization estimating graph connectivity Approach Design local controllers so the agents interaction has the desired group behavior as a (global) attractor Design distributed estimators to give each agent the global information it needs for control: information diffusion Constraints Identical agents Robust to agent failure; decentralized Scalable or PI estimator Dynamic average consensus estimator Key object: communication graph Laplacian matrix and its second-smallest eigenvalue 2 Example: Swarm Moment Control Five moments: two first moments (center of mass), three second (inertia) [Belta and Kumar, 2004] Local gradient control to achieve desired position, shape Moments estimated by information diffusion Example: Swarm Moment Control Five moments: two first moments (center of mass), three second (inertia) [Belta and Kumar 2004] Local gradient control to achieve desired position, shape Moments estimated by information diffusion Example: Swarm Moment Control Five moments: two first moments (center of mass), three second (inertia) [Belta and Kumar 2004] Local gradient control to achieve desired position, shape Moments estimated by information diffusion Coupled Stability unstable if control gains are too aggressive, or information diffusion is too slow A Control Recipe? 1. Encode the goal in a cost 2. Design a local controller K initial to achieve the goal 3. Design a signal generator G and global state estimator Q, R to estimate the information needed by K initial 4. Construct K by replacing global quantities in K initial with local estimates may add terms to achieve global convergence enforce dissipativity conditions to guarantee stability Example: Moment Control 1. Encode goal in cost J(p) = (f(p) - f * ) T (f(p) - f * ) 2. Design initial controller K initial 3. Design estimator for five moments 4. Modify K for global stability robot positions actual moments desired moments positive definite gains estimate sensor input internal state nonlinear damping Experimental Setup Modified e-puck robots xbee robot-robot and robot-GPS comm Environmental Modeling Scalar environment model Group measurements Information filter Cost function Vehicle dynamics Gradient control US Naval Coastal Ocean Model with Ira Schwartz, NRL Applications Formation control Decentralized data fusion and environmental modeling Target tracking Graph connectivity estimation Issues Coupled stability Optimal estimator gain selection Hierarchy and micro-groups Discrete-time, asynchronous, delayed, packet loss Thanks Randy Freeman Peng Yang Mike Hwang Multi-agent coordination by decentralized estimation and control, IEEE T Automatic Control, to appear Decentralized environmental modeling by mobile sensor networks, IEEE T Robotics, June 2008 Decentralized estimation and control of graph connectivity in mobile sensor networks, ACC 2008 Distributed cooperative active sensing using consensus filters, ICRA 2007 Stability and convergence properties of dynamic average consensus estimators, CDC 2006 Distributed estimation and control of swarm formation statistics, ACC 2006 Consensus Tsitsiklis et al. 1986; Vicsek et al. 1995; Jadbabaie et al. 2003; Olfati-Saber et al. 2004, 2007 Environment modeling Speyer 1979; Durrant-Whyte et al. 1994, 2004; Olfati-Saber and Shamma 2005; Leonard et al. 2004, 2007; Schwager et al. 2006; Roumeliotis et al. 2007; Zhang and Sukhatme 2007; Martinez 2007; Cortes 2009 Formation control Desai et al. 2001; Leonard and Fiorelli 2001; Tanner et al. 2004; Belta and Kumar 2004; Fax and Murray 2004; Justh and Krishnaprasad 2004; Francis et al. 2004; Ira Schwartz