DAutonomous toggle Scissor jack
25
Mechanical Engineering Department Mini Thesis Project Autonomous Toggle Scissor Jack - 0 -
description
designing the advanced featured autonomous toggle scissor jack
Transcript of DAutonomous toggle Scissor jack

Mechanical Engineering Department
Mini Thesis Project Autonomous Toggle Scissor Jack
- 0 -
For the fulfillment of particle Requirement of manufacturing technology
QUAID-E-AWAM UNIVINERSITY OF ENGINEERNIG SCIENCE & TECHNOLOGY
Project supervisor
Dr. ABDUL SATTAR JAMALI

Manufacturing of Autonomous Toggle Scissor Jack
Mini Thesis Project
Design & Fabrication of Autonomous Toggle Scissor Jack - 1
UNDER THE SUPERVISOR OF
Dr. ABDUL SATTAR JAMALI
PREPARED BY
ASAD ALI MANGI (GL) 07ME23
WAQAR AHMED (AGL) 07ME58
MUMTAZ LAKHAIR (MEMBER) 07ME69
BILAL SOOMRO (MEMBER) 07ME83
FAHEEM ZAMAN (MEMBER) 07ME65

Table of content
Abstract ------------------------------------------------ (3)
Introduction --------------------------------------------- (4)
Toggle Scissor jack Characteristics----------------- (5)
Types of Screw Jack---------------------------------- (6)
Accessories of Toggle jack---------------------------- (7)
Manufacturing of jack--------------------------------- (9)
Deign Considerations------------------------------ (10)
Dimensions-------------------------------------------- (11)
Manufacturing process------------------------------ (14)
Calculations------------------------------------------- (16)
Recommendations----------------------------------- (16)
References------------------------------------------- (17)
Design & Fabrication of Autonomous Toggle Scissor Jack - 2

ABSTRACT
Toggle Scissor jacks are simple mechanisms used to drive large loads short distances and to lift the heavy loads. It also have the advanced feature of Rotating the parts about their axis where there is not enough space to move the load. The power screw design of a common Toggle scissor jack reduces the amount of force required by the user to drive the mechanism. Most Toggle jacks are similar in design, consisting of eight main members out of whom four are driven by a power screw and rest of four by loading condition. In this report, a unique design of a Toggle jack is proposed used to lift the heavy loads at the stable state with the unique condition to rotate the load without moving the load and without using human man power or by using the motor to lift the jack. Toggle screw jack is manufactured by manufacturing the member, including the power screw sleeves, is made of the common c-shape. This eliminates the need for machined power screw sleeves, which connect the four members and the power screw together. The manufacturability of the proposed design is given in this report.Toggle scissor jack lowers the cost of production.
NEW IDEA:
The idea behind the manufacturing of AUTONOMOUS TOGGLE
SISSOR JACK is to reduce the human efforts and also ease to lift the heavy loads without using
the hand power, with an advanced feature of moving the loads about their axes. Through this
equipment we a not easily lift the load but also can change the direction of the load without
utilizing the human effort
Design & Fabrication of Autonomous Toggle Scissor Jack - 3

Introduction The most basic scissor jack design is truly engineering at its finest. With the power to
magnify input forces, scissor jacks allow us to raise vast loads using only a fraction of the force
ordinarily needed. Our goal in this project is to design an efficient scissor jack capable of raising
a 2000lb load. As a screw-driven mechanical system, the jack will be manually operated and
have at least 7 inches under load. The design will be transportable and storable, have a
removable crank handle, and operate with a factor of safety of n = 2 using standard mechanical
design methods for all components. The design itself has gone through multiple stages of
development. We have taken several possible failure modes into account and are confident that
our design is efficient and safe.
Toggle scissor jack:The toggle scissor jack design, shown in Figure 1, consists of eight main lifting
members, four connection members, a power screw and a crank. Members 1 through
are all primarily c-shapes with ideal pin connections. Members 1 and 5 both have
additional details to account forth contact surfaces. The power screw is single threaded
with a collar at the member 3 connection. All members are 19.6 KN .strength of cast
iron. The following is a summary of the design features for our proposed scissor jack.
Details and design specifications are given in this report and also the manufacturing of
the links of the toggle scissor jack.
Proposed Design
.
Design & Fabrication of Autonomous Toggle Scissor Jack - 4

Toggle Scissor jack characteristics
The standard range is comprised of: metric single-face screw jacks (trapezoidal and ball screw models), imperial single-face screw jacks (ACME and ball screw models) and metric cubic screw jacks (trapezoidal and ball screw models). Lifting capacities range from 5 kN (0.56 ton) models to 1000 kN (112 ton) models. Roller screw jacks and other special models are also available to meet any application requirement.
Screw jacks are designed for both tensile and compressive loads and will operate in any orientation or mounting position.Printing, offshore and marine, paper, glass and plastics
The positive characteristics of these Scissor jacks are as follows
• Wide range of load capabilities• High and low speeds available, according to the screw type and gearing• Standard mounting arrangements and end fittings• Ease of synchronization of several screw jacks• Reliable self-locking action when in a stationary
Typical applications include, but are not limited to:• Scissor lifts• Lifting platforms• shield door adjustment• Safety door operation• test rigs• Steel leveling• Damper opening/closing• Antenna dish adjustment• coiling/ de coiling machines• Conveyor tracking• Roller adjustment (multi-industry)• clamping mechanisms• Circast and continuous casting• Air bridges• Sluice gate control• Tundish car wreckers/de-scullery• Aircraft maintenance platforms position (please checks gear ratio and screw pitch)• Special features include anti-rotation option, Anti-backlash option, and safety nut
Design & Fabrication of Autonomous Toggle Scissor Jack - 5
Many thousands of these screw jacks are operating successfully throughout the world in a wide

Range of scissor jack:The extensive range of screw jacks is supported by a comprehensive
range of complementary accessories and drive components, allowing a “one stop source” for full systems requirements. Where the standard product range does not meet customers’
particular requirements, we are happy to design and manufacture fully customized units
Types of screw jack
Basically the toggle jacks are classified in to following two main classifications that are
1. Axially translating screw (plain/keyed version)2. Rotating screw with travelling nut (rotating version)
1. Axially translating screw (plain/keyed version) Driven by precision worm gearing (worm shaft and internally threaded worm wheel), the rotary motion is converted into axial linear motion of the screw, which travels/translates through the gearbox housing. The load is attached to the end of the screw. Available in either an upright or inverted orientation in the following 2 versions Plain version keyed
Plain: Suitable where the load is permanently attached to the jack, which will prevent the screw from turning. Can be fitted with an anti-backlash feature
Keyed: This is an anti-rotation version, suitable where the jack must move through free space before connecting with the load. In trapezoidal screw jacks, a milled slot in the screw is fitted with a key to prevent the screw from turning in free space. In ball screw jacks, a square guide is fitted to the end of the screw and runs within a square bottom pipe. Can be fitted with an anti-backlash feature
Design versions
1. Rotating screw—version Driven by a precision worm gearing (screw keyed to the worm wheel), the
rotary motion of the screw is translated into linear motion of the screw. The load is attached to the end of the screw
Design & Fabrication of Autonomous Toggle Scissor Jack - 6

2. Rotating screw with travelling nut (rotating version)Driven by precision worm gearing (screw keyed to the worm wheel), the screw rotates and the travelling nut travels along it. The travelling nut carries the load. Available in either upright or inverted orientation and can be fitted with an anti-backlash feature.
Power Screws:
Power screws are used to convert rotary motion in to translational motion. It is also called translational screw. They find use in machines such as universal tensile testing machines, machine tools, automotive jacks, vises; aircraft flap extenders, trench braces, linear actuators, adjustable floor posts, micrometers, and C-clamps. There are two kinds of power screws, hydraulic and mechanical power screws. A special case is screw jack which raises or lowers the load by applying a small force in the horizontal plane. A screw thread is formed by cutting a continuous helical groove around the cylinder. These grooves are cut either left hand or right hand. The majority of screws are tightened by clockwise rotation, which is termed as r i g h t - h a n d thread. Screws with left-hand threads are used in exceptional cases.
For example, Anticlockwise forces are applied to the screw (which would work to undo a right-hand thread), a left-hand-threaded screw would be an appropriate choice. Power screws are typically made from carbon steel, alloy steel, or stainless steel and they are usually used with
Design & Fabrication of Autonomous Toggle Scissor Jack - 7
Axially translating screw—version N or V The rotary motion of precision worm gearing (worm shaft and internally threaded worm wheel) is converted into axial linear motion of the screw, which travels/translates through the gearbox housing. The load is attached to the end of the screw

bronze, plastic, or steel mating nuts. Bronze and plastic nuts are popular for higher duty applications and they provide low coefficients of friction for minimizing drive torques. There are important terms and figures that need to be understood before designing power
Screws: 1. P I t c h: is the distance from a point on one thread to the corresponding thread on the next adjacent thread, measured parallel to the axial plane. 2. L e a d: is the distance the screw would advance relative to the nut in one rotation. For single thread screw, lead is equal to pitch.3. Helix Angle: is related to the lead and the mean radius by the equation below;
Design & Fabrication of Autonomous Toggle Scissor Jack - 8

Manufacturing of the toggle jack
Design Objective In order to design the jack Specify design considerations such as factor of safety, material selection criteria, loding conditions etc. To study effects of stresses on the power screw parts Direct tensile or compressive stress on frame due to axial load Tensional shear stress in the minimum cross section of the
screw by the twisting moment Shear stress at the threads of the screw at the room diameter and at
the threads of the nut at the outside diameter due to axial loading Bearing pressure at the thread surfaces of the screw and nut To determine the torque required to raise or lower the given
load To determine the efficiency of the power screw To determine the dimensions of the different parts of the screw
Parts of the jack1. Frame (links)2. Spindle3. Base plate4. Stepper motor5. Nuts6. Pin joint7. C-shaped pin
Design & Fabrication of Autonomous Toggle Scissor Jack - 9

Fig (4).Complete assembled view of the toggle scissor jack
Procedure of manufacturing:
Manufacturing of the links:For the manufacturing of the jack first of all we have to consider the links used
in the manufacturing of the jack, all the one end of the eight links are joined by pins consecutive to each other and other end by welding two on the upper end and two with the base.
Manufacturing of the base plate: The base is cut in square shape so that it can sustain the heavy load and make the jack capable to remain stable at heavy loads.
Manufacturing of the upper plate:The upper is made by welding the square plate to carry the load easily, and provides
the uniform base to the load so that.
Manufacturing of spindle:The spindle is attached to the motor to autonomous action to the jack connected
with the toggle switch. The motor is connected next to the jack which gives the upward and downward motion to the jack.
The whole assembly is placed on the wooden base to show the over all moving mechanism of the jack connected to the 12-v battery by means of toggle switch
Deign ConsiderationsDesign of the screw
i. Core diameter of the screw is determined using allowable stress and the given load =0.5 cmii. Threaded portion = 8.5cmiii. Length of the spindle= 30cm
Design of the nut Two nuts are used each of having bore of =1cm
Design of upper plate:Rectangular plate of dimension = 10 x 5 cm
Base plate
Design & Fabrication of Autonomous Toggle Scissor Jack - 10

Area of base plate 13 x 18 cm
Links8 links of 14 cm in length forming the scissor shapeWidth of the link = 3.7 cm
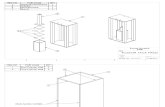
Dimensions of the jack The various dimensions of the jack is given in the shown figure having the top- view and the front –view
Fig (2) Front view
.
Fig (3) Side view
Design & Fabrication of Autonomous Toggle Scissor Jack - 11

Selection and Calculation: The various parameters of the links and power may be calculated from various charts given below, and after selection its calculation is being made for its proper working
Design & Fabrication of Autonomous Toggle Scissor Jack - 12
Thin lifting screws may buckle sideways when subjected to compressive loads. Before the permissible compressive force is defined for the screw, allowances must be made for safety factors as appropriate to the installation
In order to limit the heat generated by friction within a worm gear screw jack, the lifting force and lifting speed are limited as a function of the relative duty cycle. The maximum permissible lifting force and lifting speed can be estimated with the aid of the following method

Critical buckling force of a screw jack under compressive loads
Design & Fabrication of Autonomous Toggle Scissor Jack - 13
The required drive torque for a worm gear screw jack is governed by the axial load acting on the jack screw, the transmission ratio and the efficiency. It should be noted that the breakaway torque may be considerably higher than the torque required for continuous running. This applies in particular to worm gear screw jacks with low efficiency after a long standstill period. The acceleration torque should be checked if necessary in cases with large screw pitches and very short run-up times.

Required drive torque for a worm gear of toggle jack system
The required drive torque for a worm gear screw jack system is governed by the drive torque values for the individual jacks, with allowance for the static and dynamic frictional losses in transmission components (coupling, connecting shafts, pedestal bearings, angle gearboxes, etc.). It is useful to draw a diagram illustrating the flow of forces.
Manufacturing processes:
Design & Fabrication of Autonomous Toggle Scissor Jack - 14

Manufacturing of toggle jack is generally carried out by applying various operations that are carried out by different manufacturing process that are used in the manufacturing of the jack. The process are explained below
1. Bending process2. Welding process.3. Turning and drilling process4. Cutting process
1. Bending process: The bending process is generally carried out for the bending of the links of the jack for the manufacturing of the jack.
2. Welding process: Welding is generally done for the joining of the parts of the base and the links also the upper plate on the jack.
3. Drilling process:Drilling is done for making the holes to attach the external links with the primary links.
4. Cutting process:Cutting is done for cutting the plates to make the various parts of the jack.
Accessories of toggle jack
Screw: Plane carbon steel (30C8 – IS: 1570-1978) is selected because screw is always under Tensional, bending and axial load. Carbon steel is chosen due to the strength issues. This steel is also used for the handle of the screw jack. (σy i e l d = 400 MPa,τ =240 MPa, E=207GPa)
Nut: In order to reduce the friction resistance between the screw and nut a softer material is selected for the nut. Phosphor Bronze (Grade 1-IS: 28-1975) is a proper material for nut construction because it acts very well against wear resistance and reduces torque to overcome friction. (σu l t i m a t e = 190 MPa, yield (tension) =100 MPa, yield (compression) = 90 MPa,τ =80 MPa )
Design & Fabrication of Autonomous Toggle Scissor Jack - 15

Screw Jack Handle:
Plane carbon steel (30C8 – IS: 1570-1978) is selected for the handle of the jack because of the high strength it offers. (σy i e l d = 400 MPa,τ =240 MPa, E=207GPa)
Frame:
Grey cast iron is used which is cheap and has good machinability.
The effective lifting height is chosen to be 0.5m (500 mm).
Average coefficient of friction between the material soft steel and cast iron is taken 0.10 when it is lubricated. But for this specific design, it is taken as 0.18 assuming it dry for safe operations.
Limiting values for bearing pressure between steel and cast iron is taken as 15. 05
MPa According to agronomists the force of the hand is about 150 to 200 N. In this design we assume that is the handle is rotated by two hands which give 400 N hand forces for the design of the handle
Viper motor
The viper used to atomize our mechanism, the motor is used at the place of screw jack handle which raises or lowers the jackThe power rating of motor is = 20 kg/s
Buckling of the screw Buckling is studied when the load is compressive and the unsupported length between the screw and the nut is long. When it is short, then it is assumed a column and buckling issue doesn’t rise. If the critical load is more than the load we have then our design is safe and there is no chance of buckling.
Design & Fabrication of Autonomous Toggle Scissor Jack - 16

Conclusion
1. This project was designed to enhance the manufacturing Idea about the processes and fabrication of the equipment. 2. Through this experience, I found the chance to apply my knowledge of previous courses like Mechanics of material, machine design, Kinematics, etc to blend it with manufacturing technology subject.
3. The designed jack works having certain limitations.
4. The toggle jack has a unique design to rotate the load without moving the load by simply through the mechanism of rotation by Motor.
5. The power of jack was increased by attaching the high rating motor capable of lifting the heavy load.
6. The motor attached to the jack is simply the 12-v which is operated by simply 12-v adopter.
7. The toggle jack is capable to lift the load up to 34.45 cm height
Design & Fabrication of Autonomous Toggle Scissor Jack - 17

8. When designing the system, we should make sure the material is cost effective, and durable. In the meantime, it should also be available in the market
9. The maximum Load which is found to be raised through the jack is found out as 20 KN of load the extra load may damage the Motor 10. For the design of screw jacks, a higher factor of safety is recommended due to the nature of the application.
11. Dimensions should be realistic.
12. The system should be tested by lifting the load up to 38.6 Kg
Design & Fabrication of Autonomous Toggle Scissor Jack - 18