
DARPA Robotics Challenge Proposers’ Daycga/humanoids-ugrad-12/drc.pdf · 2 . DARPA Robotics...
80
DARPA Robotics Challenge Proposers’ Day April 16, 2012
Transcript of DARPA Robotics Challenge Proposers’ Daycga/humanoids-ugrad-12/drc.pdf · 2 . DARPA Robotics...

DARPA Robotics
Challenge
Proposers’ Day April 16, 2012

2
DARPA Robotics Challenge Proposers’ Day
The Proposers’ Day will
begin at 12:10 PM EDT
April 16, 2012
3
DARPA Robotics Challenge Proposers’ Day
Dr. Gill Pratt Program Manager, DARPA

DARPA Robotics Challenge Proposers’ Day Agenda
4
12:00PM-12:10PM Set up/Test Connection
12:10PM-12:15PM Introductory Remarks, OSTP Dr. John Holdren, Assistant to the President for Science and Technology and Director of Science and Technology Policy (OSTP)
12:15PM-12:25PM Introductory Remarks, DARPA
Dr. Kaigham J. Gabriel, Acting Director, DARPA
12:25PM-12:40PM DARPA/TTO Overview Mr. Paul Eremenko, Acting Director/Deputy Director, DARPA TTO
12:40PM-1:40PM Robotics Challenge Overview Dr. Gill Pratt, Program Manager, DARPA
1:40PM-1:55PM Contracts Management Mr. Chris Glista, Contracting Officer, DARPA
1:55PM-2:10PM GFE Hardware Dr. Robert Playter, Boston Dynamics, Inc.
2:10PM-2:25PM GFE Software Mr. Nate Koenig, Open Source Robotics Foundation, Inc.
2:25PM-2:45PM Break
2:45PM-3:15PM Q/A Response
3:15PM Adjourn
5
Introductory Remarks, OSTP
Dr. John Holdren Assistant to the President for Science and Technology and Director, Office of Science and Technology Policy (OSTP)

Dr. John Holdren VIDEO
4/16/2012 6 Further dissemination only as directed by DARPA Public Release Center or higher DoD authority.
7
Introductory Remarks, DARPA
Dr. Kaigham J. Gabriel Acting Director, DARPA

4/16/2012 8 Further dissemination only as directed by DARPA Public Release Center or higher DoD authority.
Dr. Kaigham J. Gabriel VIDEO

DARPA/TTO Overview
Mr. Paul Eremenko, Acting Director Tactical Technology Office
Briefing prepared for Robotics Challenge Proposers’ Day
April 16, 2012 Photo: DARPA
4/16/2012 9 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).
1 9 5 7
Sputnik
34th President of the United States 1953-1961. Coined the term “military-industrial complex” and warned against its unwarranted influence. Created DARPA in response to Sputnik.
First orbiting satellite. The satellite was not a threat, but the level of technology indicated that the Soviet Union possessed superior capability for intercontinental reconnaissance and bombing.
Dwight D. Eisenhower
1 9 5 8
DARPA
4/16/2012 10 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).
The Defense Advanced Research Projects Agency (DARPA) was established in 1958 to prevent strategic surprise from negatively impacting U.S. national security and create strategic surprise for U.S. adversaries by maintaining the technological superiority of the U.S. military. To fulfill its mission, the Agency relies on diverse performers to apply multi-disciplinary approaches to both advance knowledge through basic research and create innovative technologies that address current practical problems through applied research. As the DoD’s primary innovation engine, DARPA undertakes projects that are finite in duration but that create lasting revolutionary change.
Mission
4/16/2012 11 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

► Create and prevent strategic surprise
► Lean, agile risk-taking organization
► Idea-driven and outcome-oriented
► Demonstrate solution concepts
Idea leadership culture
4/16/2012 12 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).
“Impossible” ideas become real life at DARPA
4/16/2012 13 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

1 8 6 5 1 9 6 7 1 9 5 7
DARPA: F1 engine Saturn V
Photo: http://moonbooks.net
Books
Spaceflight
4/16/2012 14 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

1 9 6 6 1 9 8 6 1 9 8 0 ’ s
Photo: http://www.globalnerdy.com Photo: http://www.wired.com
Television DARPA: research Cellular phone
Wireless communications
4/16/2012 15 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).
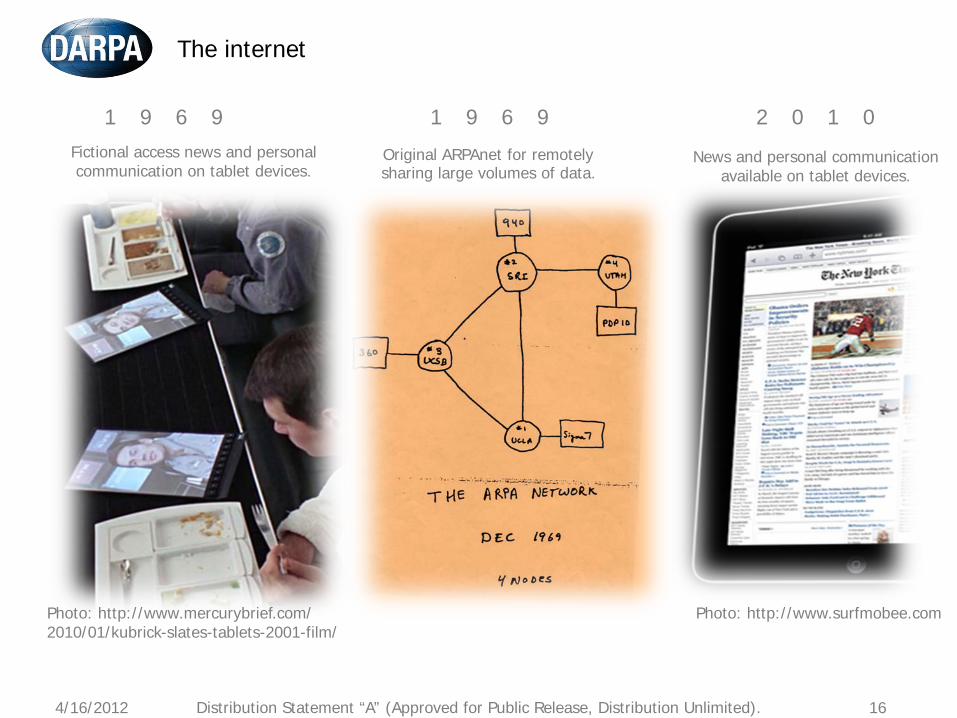
Original ARPAnet for remotely sharing large volumes of data.
1 9 6 9 1 9 6 9 Fictional access news and personal communication on tablet devices.
2 0 1 0
News and personal communication available on tablet devices.
Photo: http://www.mercurybrief.com/ 2010/01/kubrick-slates-tablets-2001-film/
Photo: http://www.surfmobee.com
The internet
4/16/2012 16 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

DARPA sponsored flight technology demonstrator to improve survivability of a single aircraft against a modern IADS
Combined with precise weapons against C2 targets to improve survivability for all forces in
Desert Storm
1 9 9 1 1 9 7 8 1 9 7 6
“Hopeless diamond” concept rejected by U.S. Air Force
“Stealth”
4/16/2012 17 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

1 9 9 0 ’ s 1 9 6 3 DARPA Transit 2A satellite
pioneered doppler navigation for specific military missions.
Became global precision navigation technology for military and civilian use.
Continued military and commercial refinement for
tactical applications
2 0 1 0
Global Positioning System
4/16/2012 18 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

1 9 9 7 - 2 0 0 9 1 9 8 6
DARPA flight technology demonstrator to prove the feasibility of the technology; shelved because it did
not fit into prevailing air operations thinking.
Rapidly adopted and matured to counter new threats more effectively than existing
platforms and doctrine could.
Photo: General Atomics
Photo: General Atomics
Surveillance UAV’s
4/16/2012 19 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

2 0 1 1 1 9 2 7
DARPA: Autonomous Robotics Manipulation
Image: http://www.jeffbots.com/maria.html
2 0 X X
Movies
Automation
4/16/2012 20 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

1 9 6 2 2 0 1 0 2 0 X X
Books Research
Image: http://www.tomswift.info
Multi-mode mobility
4/16/2012 21 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

“X”-Planes
RF Stealth The Internet
GPS
Space Launch and Navigation
Synthetic Aperture Radar
Autonomous Systems
Continuous accomplishment
4/16/2012 22 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

• Comms & Networks
• Global Tactical ISR
• Energy • Hybrid
Warfare • • Extreme
Environments
• Space Systems & Space Awareness
• Hypersonics
• Space Access
• Aero- & Hydrodynamic Systems
• Ground & Soldier
Systems • Design Synthesis • Manufacturing • Qualification/V&V • Autonomy
• Global ISR
• Cyber
• Social Networks
• Computational Social Science
• Language Transparency
• Edge Finding
• Training/ Education
• Basic Science Core
• Devices
• Integration
• Power
• Architectures
• Application
• Physical Sciences
• Materials
• Mathematics
• Training & Human Effectiveness
• Biological
Warfare Defense
• Biology
DSO MTO I2O TTO STO AEO
• Agile Programs with Frequent Development Cycles
• Conduct Systematic Rigorous
• Assessments
• Explore New Contracting Approaches
• Develop Strong Relationships
Defense Sciences Office
Microsystems Technology Office
Information Innovation Office
Tactical Technology Office
Adaptive Execution Office
Strategic Technology Office
Organization
4/16/2012 23 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

Flat organization Little hierarchy to ensure the free and rapid flow of information, ideas, and decisions.
Outstanding program managers DARPA hires creative, independent people with big ideas and empowers them.
Project-based assignments Projects organized around a challenge model and typically last three to five years; longer if necessary to facilitate transition.
No DARPA labs Majority of the research is sponsored in industry and universities with a small amount in government labs.
Flexible outsourcing of staff and performers Great talents and ideas from industry, universities, and government labs with technical, contracting, and administrative services from other commercial and government agencies.
Professional reach
4/16/2012 24 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).
www.darpa.mil
4/16/2012 25 Distribution Statement “A” (Approved for Public Release, Distribution Unlimited).

DARPA Robotics Challenge
Proposer’s Day
April 16th, 2012
Dr. Gill A. Pratt, Program Manager
26 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

Recent Disasters
27 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited) Fukushima - 2011
Katrina - 2005 Deepwater Horizon
2010
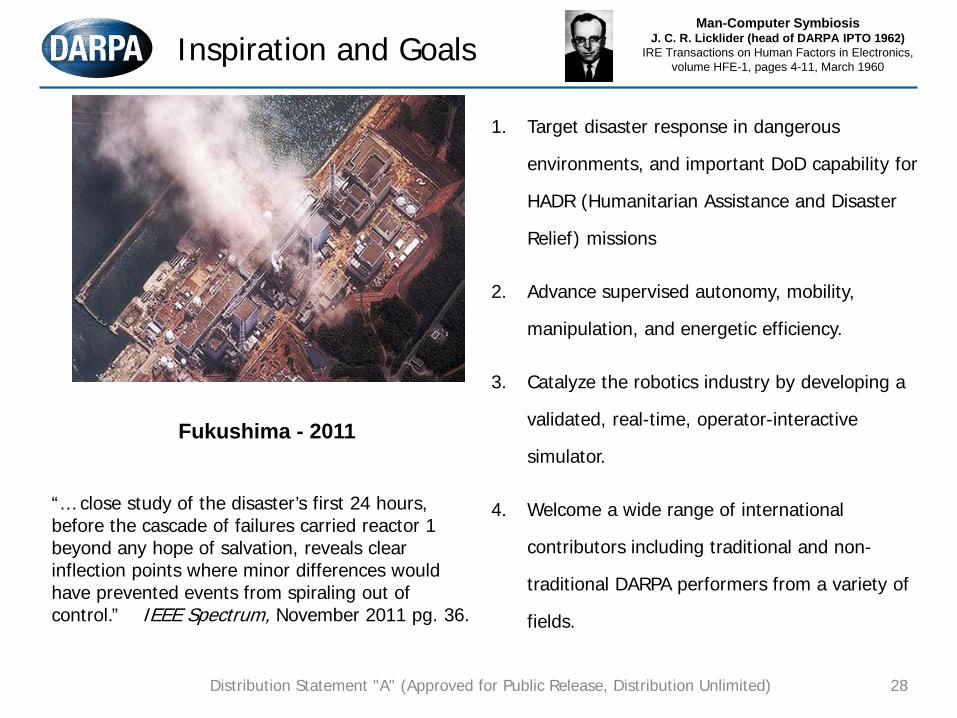
Inspiration and Goals
28 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)
1. Target disaster response in dangerous
environments, and important DoD capability for
HADR (Humanitarian Assistance and Disaster
Relief) missions
2. Advance supervised autonomy, mobility,
manipulation, and energetic efficiency.
3. Catalyze the robotics industry by developing a
validated, real-time, operator-interactive
simulator.
4. Welcome a wide range of international
contributors including traditional and non-
traditional DARPA performers from a variety of
fields.
Man-Computer Symbiosis
J. C. R. Licklider (head of DARPA IPTO 1962) IRE Transactions on Human Factors in Electronics,
volume HFE-1, pages 4-11, March 1960
“… close study of the disaster’s first 24 hours, before the cascade of failures carried reactor 1 beyond any hope of salvation, reveals clear inflection points where minor differences would have prevented events from spiraling out of control.” IEEE Spectrum, November 2011 pg. 36.
Fukushima - 2011

1. Environment, even degraded, has been engineered for humans
2. No shortage of human tools, from hand tools to vehicles
3. Human-like robot capabilities are easier for domain experts to understand and untrained operators to control
Why emphasize human-like robot capabilities?
29 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

30
Supervisory Autonomy and Predictive Models
Environment Human
Environment Tele-op Robot
Human
Environment Tele-op Robot
Environment Human Predictive Model
Environment Sprv. Auto Robot
Sprv. Auto Robot
Environment Human
DARPA Challenge
High Fidelity Interface
Low Fidelity Interface
Variable Fidelity Interface
Predictive Model
Human Predictive Model
Human Predictive Model
Decouple
Decouple
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

31
Questions this Program will Address
Human Predictive Model
Sprv. Auto Robot
1. What kind of I/O
2. What kind of messages
3. What autonomy, mobility, manipulation, energetics
4. Tasks and Metrics
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)
32
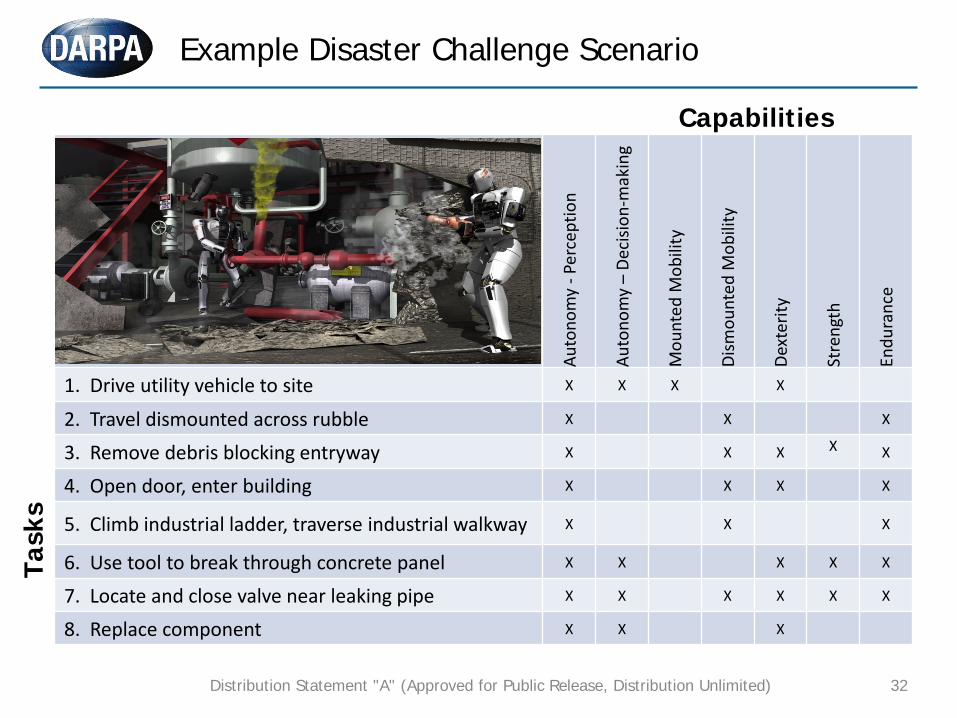
Example Disaster Challenge Scenario
Auto
nom
y - P
erce
ptio
n
Auto
nom
y –
Deci
sion-
mak
ing
Mou
nted
Mob
ility
Dism
ount
ed M
obili
ty
Dext
erity
Stre
ngth
Endu
ranc
e
1. Drive utility vehicle to site X X X X
2. Travel dismounted across rubble X X X
3. Remove debris blocking entryway X X X X X
4. Open door, enter building X X X X
5. Climb industrial ladder, traverse industrial walkway X X X
6. Use tool to break through concrete panel X X X X X
7. Locate and close valve near leaking pipe X X X X X X
8. Replace component X X X
Task
s
Capabilities
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

33
Planned Tasks – subject to change
Task 1 - Drive a utility vehicle to the site The robot must demonstrate mounted mobility by ingress to the vehicle, driving it on a road, and egress from the vehicle. The robot must also demonstrate manipulation by operating the controls, including steering, throttle, brakes, and ignition. The robot must steer, accelerate, and brake. Task 2 -Travel dismounted across rubble The robot must demonstrate dismounted mobility by crossing terrain ranging from smooth and level, to rough and sloped, with some loose soil and rocks. This terrain will be easily traversable by a human. Task 3 - Remove debris blocking an entryway The robot must demonstrate the dexterity and strength to move an object blocking an entryway. The object will have size, weight, and other properties to be movable either by a person or by the GFE Platform. The object mass is expected not to exceed 5 kg. Task 4 - Open a door and enter a building The robot must demonstrate the dexterity to operate a door handle and the strength to push the door open.
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

34
Planned Tasks (cont.) – subject to change
Task 5 - Climb an industrial ladder and traverse an industrial walkway The robot must demonstrate dismounted mobility to traverse an industrial elevated walkway. It is expected that the walkway (or catwalk) will have a grated surface and handrails. Task 6 - Use a tool to break through a concrete panel The robot must demonstrate using a power tool to perform forceful manipulation. The power tool is expected to be an air or electric impact hammer and chisel, or an electric reciprocating saw. Task 7 - Locate and close valve near leaking pipe The robot must demonstrate the perception ability to find a leaking pipe and a nearby valve, the dismounted mobility to approach the valve, and the manipulation ability to close the valve Task 8 - Replace cooling pump The robot must demonstrate the perception ability to locate the pump, the manipulation ability to loosen one or more fasteners, and the bi-manual manipulation ability to extract and replace the pump.
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

Distribution Statement "A" (Approved for Public Release, Distribution Unlimited) 35
Participation Options
Track A - Funded Teams design and build platform systems to participate in Disaster Response Challenge. Track B –– Teams develop algorithms using DARPA provided Simulator. Disaster Virtual Challenge conducted to identify which teams will be provided GFE Robot and additional funding to participate in Disaster Response Challenge Track C – Unfunded teams use Simulator to and develop algorithms and participate in Disaster Virtual Challenge and will compete along with Track B teams for GFE Robot and funding award Track D – Unfunded teams develop platforms to compete in Disaster Response Challenges

Planned Schedule and Funding
36 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

37
Planned Program Funding
The program has planned the following funding for teams. This plan is subject to change depending on the number of qualified teams and available resources. Phase 1 Track A: Up to $3M for each team (up to five (5) teams for fifteen (15) months). Track B: first nine (9) months through the Virtual Disaster Response Challenge: Up to $375k for each team, with up to twelve (12) teams. Track B/Track C: last six (6) months after the Virtual Disaster Response Challenge: Up to $750k additional for each team, with up to six (6) teams. Phase 2 Up to $1M for up to eight (8) of the top performing teams from the first physical disaster challenge. Prize Anticipated to be $2M to a single team.
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

Planned Key Dates
38
• May 31, 2012 – BAA Closing
• October 2012 – Anticipated Contract Awards/Program Kickoff
• June 2013 – Virtual Disaster Response Challenge
• December 2013 – Disaster Response Challenge #1
• December 2014 – Disaster Response Challenge #2
Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)
www.darpa.mil
39 Distribution Statement "A" (Approved for Public Release, Distribution Unlimited)

BAA Process
Mr. Chris Glista
DARPA Contracts Management Office
DARPA Robotics Challenge Proposers’ Day
April 16, 2012
40 Distribution Statement A
• BAA and any amendments posted in FEDBIZOPPS
• BAA covers all info needed to propose
• TIME PERIOD – BAA is open until May 31, 2012
• Instructions are detailed in the BAA (Follow closely)
• Following the proposal instructions assists the evaluation team to clearly understand what is being proposed and supports a timely negotiation.
• ALL questions to [email protected]
BAA Specifics
4/16/12 41 Distribution Statement A

• Federal Acquisition Regulation (FAR) Part 35
http://farsite.hill.af.mil
• “A general announcement of an agency’s research interest including criteria for selecting proposals of all offerors capable of satisfying the Government’s needs.”
• For the acquisition of basic and applied research not related to the development of a specific system or hardware procurement.
BAA Background
4/16/12 42 Distribution Statement A

• Used when proposals with varying technical and scientific approaches can be expected
• Proposals need not be evaluated against one another since they are not submitted in accordance with a common work statement.
• Primary basis for selecting proposals shall be technical, importance to agency programs, and fund availability.
• Cost realism shall also be considered
BAA Background (cont.)
4/16/12 43 Distribution Statement A
• Contractors SHALL NOT subcontract technical or scientific work without the contracting officer’s knowledge
BAA Background (cont.)
4/16/12 44 Distribution Statement A
• FAR PART 15 “Contracting By Negotiation” does not apply in full
• No “competitive range” determination
• No mandatory “discussions”
• No opportunity for proposal revision
• “Cost and Pricing Data” (certification required for all FAR-based contract proposals greater than $700K)
• Subcontract consent and key personnel clauses to be included in awards
IMPLICATIONS
4/16/12 45 Distribution Statement A
• ALL questions to [email protected]
• After Receipt of Proposals – Government (PM/PCO) may communicate with proposers to understand the meaning of some aspect of the proposal that is not clear or to obtain confirmation or substantiation of a proposed approach, solution, or cost estimate
• Informal feedback may be provided once selection(s) are made – no “ranking” provided
Communications
4/16/12 46 Distribution Statement A

• All interested/qualified sources may respond
• International participants/resources may participate to the extent authorized by applicable Security Regulations, Export Laws, etc.
• Small Business Participation Encouraged, Teaming Not Required
Applicant Eligibility
4/16/12 47 Distribution Statement A

• Government agencies/labs, FFRDCs cannot propose to this BAA in any capacity, UNLESS they can clearly demonstrate the work is not otherwise available from the private sector AND they also provide written documentation citing the specific statutory authority (as well as, where relevant, contractual authority) establishing their eligibility to propose to government solicitations
Applicant Eligibility (cont.)
4/16/12 48 Distribution Statement A

• All facts relative to a potential conflict of interest must be disclosed.
• Examples of conflicts listed at FAR Part 9.505
• Provided Systems Engineering and Technical Direction
• Contractors MAY NOT simultaneously provide SETA support and be a technical performer at DARPA without waiver approved by DARPA Director
Organizational Conflict of Interest
4/16/12 49 Distribution Statement A

Award Instrument
• Contract, Grant, Cooperative Agreement, Other Transaction
• http://farsite.hill.af.mil/ (FAR Contracts)
• http://www.dtic.mil/whs/directives/corres/html/321006r.htm (Grants, Cooperative Agreements)
• www.acq.osd.mil/dpap/Docs/otguide.doc (Other Transactions)
• In all cases the Contracting Officer shall have sole discretion to select award type instrument
Award Type
4/16/12 50 Distribution Statement

• Assert rights to all technical data & computer software generated, developed, and/or delivered to which the Government will receive less than Unlimited Rights
• Assertions apply to Prime and Subs
• Justify “Basis of Assertion”
• Use defined “Basis of Assertion” and “Rights Category”
• Assessed during evaluation under the “Potential to Accomplish Technology Transition” Evaluation Factor
Rights to Technical Data and Computer Software
4/16/12 51 Distribution Statement A

Atlas Robot Overview for DARPA Robotics Challenge
Robert Playter Marc Raibert April 16, 2012

Atlas Overview
• Near copy of
PETMAN/Atlas • 50th percentile male
anthropometry • 27 actuated, hydraulic
DOF’s • 2 on-board computers • Power tether • Sensing head • Modular wrist • Protective shells

Current Performance
PETMAN Video

Robot Degrees of Freedom (DOF)
• 27 Active DOFs – NECK: 2 DOF – BACK: 3 DOF – SHOULDER: 3 DOF – ELBOW: 1 DOF – WRIST: 2 DOF – HIP: 3 DOF – KNEE: 1 DOF – ANKLE: 1 DOF
• Hands attach through modular wrist – Mechanical interface – Electrical & data interface

56
Actuator Design Targets
Joint DoF Derived RoM in degrees
Adduction/Abduction (° rx) Flexion/Extension (° ry) Internal/Medial Rotation (° rz) min max range min max range min max range
hip 3 -30 30 60 -100 20 120 -10 70 80 knee 1 0 135 135 ankle 2 -40 40 80 mid foot n/a back 3 -40 40 80 -35 25 60 -45 45 90 neck 3 -45 45 90 -90 90 180 shoulder 3 0 115 115 -90 50 140 -40 100 140 elbow 1 -135 0 135 wrist 3 -30 60 90 -85 85 170
Joint DoF Derived Strengths in Newton-Meters
Adduction/Abduction (rx) Flexion/Extension (ry) Internal/Medial Rotation (rz) Strength Strength Strength
hip 3 180 260 110 knee 1 220 ankle 2 220 mid foot 0 Passive Flexure back 3 100 180 110 neck 3 25 54 shoulder 3 110 110 80 elbow 1 100 wrist 3 30 15

57
Robot Weight Estimates
• Weight estimate for current design: 178 lbs
COMPONENT MASS [KG]
MASS [LBS]
Pelvis & Leg 30.7 67.7
Torso & Back 9.8 21.5
Arm & Hand 10.2 22.6
Head & Neck 1.8 4.0
Hoses & Cables 3.4 7.6
Skin 17.0 37.5
Misc. Hardware 5.5 12.1
Fluid (Oil/Water) 2.5 5.6
ROBOT TOTAL 81 178
Power Plant 22.0 48.5
TOTAL 103 227 12%13%
2%
4%
21%
7%3%
38%
Pelvis & LegTorso & BackArm & HandHead & NeckHoses & CablesSkinMisc. HardwareFluid (Oil/Water)

58
Power Pack
• Tether – Electric power – Cooling water
Power Tether
Laboratory Electrical
Power
Cooling Water

Robot Computing Architecture
Robot Computer Actuators (27) Joint Sensors Hands
GigE
CANbus
GigE
User Computer
Sensors - IMU - LIDAR - Stereo Cameras
CANbus
WIFI

Mr. Nate Koenig Open Source Robotics Foundation, Inc.

Simulation for robots
Focus on accurate physical simulation Easy transition to and from simulation Remove hardware issues and resource constraints
Support common robot control software Custom client code ROS interface Player interface
Support sharing of resources New sensors, actuators, models, and environments
Additional Benefits
No real-time constraints Simulate faster than real time
Regression testing Use simulation for automated tests
Universal test environment Create benchmarks Run a competition
Flexibility Handles a wide range of environments and tasks Thin programmatic layer to Gazebo functionality





Architecture
Physics Visualization Interfaces
Rigid Body Dynamics OpenGL Plugins and IPC ODE Bullet
OGRE Google Protobuf Boost
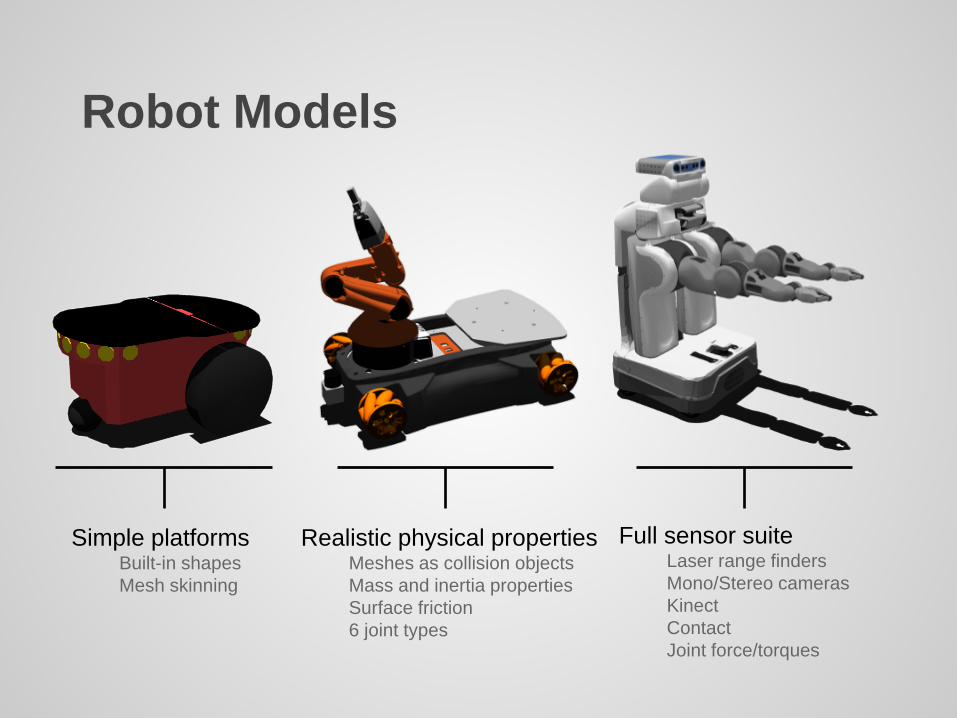
Robot Models
Simple platforms Built-in shapes Mesh skinning
Realistic physical properties Meshes as collision objects Mass and inertia properties Surface friction 6 joint types
Full sensor suite Laser range finders Mono/Stereo cameras Kinect Contact Joint force/torques

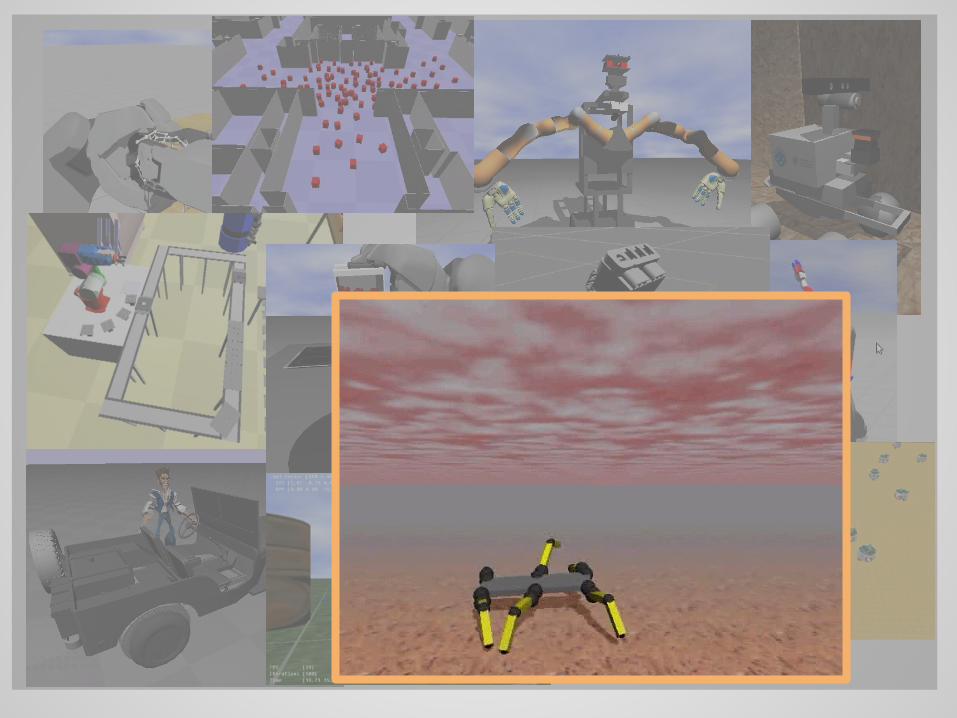
Environments Simple
Focused scenario Manipulation Perception
Aerial robots Outdoor mobile and legged robots
Outdoor
Indoor Path planning Mobile manipulation Clone real environment

Show video with next slide Presenter will talk to it

Gazebo Demo Part 1: Canyon fly-through
Custom terrain generated from a greyscale image Animated quadrotor
Thanks to Johannes Meyer and Stefan Kohlbrecher
Part 2: Pioneer2dx and office environment Player interface used to drive the Pioneer2dx Laser range finder sensor visualization
Part 3: PR2 and YouBot PR2 object manipulation using ROS Interactive markers
Part 4: Character animation Experimental animation of characters using skeletons Thanks to Mihai Dohla

Tools
Command line tools System inspection Insert and remove models
Graphical tools Model placement Joint and mass visualizations Sensor visualizations

Resources
Robot models Distributed in Gazebo Work in progress
Online model database Graphical model builder
Environments Distributed in Gazebo Google's 3D warehouse Google Sketchup or Blender
Help http://gazebosim.org

Roadmap
1.2
Vehicles Tools Outdoor environments Cluster support
1.4
Bullet integration Multi-floor structures Sonar, force-torque, pressure sensors
1.6
Customize GUI API Large environments Vehicle suspension models
2.0
Friction and noise models Hardware in the loop Deformable objects

Community
Support and Contributing http://gazebosim.org/support.html
Wiki http://gazebosim.org/wiki
Kforge project https://kforge.ros.org/projects/gazebo/

Thank you
Physics Lead John Hsu
Co-Founder: Retired Andrew Howard
Core Contributor Mihai Dolha
Contributors Christian Gagneraud Brian Gerkey Stefan Kohlbrecher Johannes Meyer Alexis Maldonado Jordi Polo Abbas Sadat Richard Vaughan

78
DARPA Robotics Challenge Proposers’ Day
We are on a temporary break
and will be back shortly

79
DARPA Robotics Challenge Proposers’ Day
Q&A Response

80
DARPA Robotics Challenge Proposers’ Day
Adjourn


















