
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada,...
21
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd 1 Active Optics system for the ASTRI-2M prototype for the Cherenkov Telescope Array Daniele Gardiol INAF – Osservatorio Astrofisico di Torino on behalf of the ASTRI Collaboration and the CTA consortium
-
Upload
clare-ada-curtis -
Category
Documents
-
view
219 -
download
0
Transcript of Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada,...

Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd 1
Active Optics system for the ASTRI-2M prototype for the Cherenkov Telescope Array
Daniele GardiolINAF – Osservatorio Astrofisico di Torino
on behalf of the ASTRI Collaboration and the CTA consortium

2
Active Optics team:
Gerardo Capobianco, Daniele Gardiol, Davide Loreggia, Federico Russo, Antonio Volpicelli
INAF – Osservatorio Astrofisico di Torino
Daniela Fantinel, Enrico Giro, Luigi Lessio, Gabriele Rodeghiero
INAF – Osservatorio Astronomico di Padova
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
3
Overview of the talk
• Introduction: CTA (Cherenkov Telescope Array) and ASTRI (italian acronym…)
• Active Optics system of the ASTRI SST-2M prototype • Kinematic model and performance prediction • Active Optics system calibration • Conclusions
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd

4
IntroductionCherenkov Telescope Array in brief
Cherenkov Telescope Array is an initiative to build the next generation ground-based very high energy gamma-ray instrument
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
• LST (low energy): few 24 metre-class FoV ~ 4-5 degrees
• MST (medium energy range), from around 100 GeV to 1 TeV
10-12 metre-class FoV ~ 6-8 degrees.
• SST (high energy): a lot of 4-6 metre class FoV ~ 10 degrees.

5
IntroductionItaly within CTA: ASTRI
ASTRI main goal is the production, within the CTA framework, of: an end-to-end prototype of the CTA SST to be placed and tested in Serra La
Nave (mount Etna, Sicily), end 2014 a SST mini-array to be placed at the chosen CTA site, 2016
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Talk on ASTRI mini-array by G.Pareschi today at 11:40 (room 517D)
12 INAF InstitutionsIASF Milano, IASF Bologna, IASF Palermo, INAF HQ Roma, OA Brera, OA Torino, OA Padova, OA Bologna, OA Arcetri (Firenze), OA Roma, OA Capodimonte (Napoli), OA Catania2 University partners Padova, Perugia

6
ASTRI SST-2MThe Prototype
Telescope
dual-mirror Schwarzschild-Couder
FoV = 9.6° EFL = 2150 mm
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Secondary mirror
monolithic 1.8 m
Primary mirror
segmented 4.3 m 18 hex elements 850 mm side-to-side
Focal plane camera
compact (50x50x50 cm3) based on Si-PMs sensors.

7
ASTRI SST-2MThe Prototype
Telescope
dual-mirror Schwarzschild-Couder
FoV = 9.6° EFL = 2150 mm
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Secondary mirror
monolithic 1.8 m
Primary mirror
segmented 4.3 m 18 hex elements 850 mm side-to-side
Focal plane camera
compact (50x50x50 cm3) based on Si-PMs sensors.
Poster on SiPM detectors by G.Bonanno et al. this afternoon at 17:30 (room 516)
Talk on structure and mirrors manufacturing by R.Canestrari today at 11:20 (room 517D)
Poster on optics characterization and alignment by E.Giro et al. Wednesday from 18:00 to 20:00 (room 520D)
Talk on ASTRI camera by O.Catalano was yesterday…

8
Active Optics systemPrimary Mirror active supports
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
M1 segment support
One fixed point Two axial actuators Total stroke > 10 mm Positioning accuracy < 3µm Prototype for lab test

9
Active Optics systemSecondary Mirror active support
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
M2 active support
Three axial actuators Tilt + Focus Whiffletrees to share load Total stroke ~ 15 mm

10
Active Optics systemAlignment tracking system
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Each M1 segment is equipped with a laser which beam follows the optical path of the telescope
Spot position is tracked via two CCDs located at the camera edges and provides feedback on mirror tilt

11
Active Optics systemActive Mirror Control Unit
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Poster on Telescope Control Unit by E.Antolini et al. (room 516)
Telescope Control System
OPC-UA Client Telescope Control Unit
Active Mirror Control Unit (dedicated PC)
Twincat 3 (Beckhoff)
ATSKM M1 M2
Main OPC-UA ServerDB
Engineering interface
ADS

12
Kinematic modelForward Analysis
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Geometricalmodel
Opticalmodel
Segmentmodel
Behaviourprediction
5
0n
nknk pct
),(2/)(
),(2/)(
2121
2121
ttottv
ttottu

13
Kinematic modelSegment model
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
5
0n
nknk pct

14
Kinematic modelGeometrical model
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
,,,,, zyx
Provides the mirror position and tilt angles
as a function of the actuator axial position
for M1
for M2 ),( 21 tt ),,( 321 ttt
1 2
F

15
Kinematic modelOptical model - u-type movement
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Inner circle Median circle Outer circle
Δx
Δy

16
Kinematic modelOptical model - v-type movement
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Inner circle Median circle Outer circle
Δy
Δx

17
Kinematic modelPerformance prediction vs. calibration
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
M1
M2
Δx Δy
Comp. inv. function
Residual estimate
KynematicModel

p1 p2
18
Kinematic modelSystem calibration
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd 18
Example:
Seventh order polynomial Image shifts up to
mm residuals for whole M1 (18 segments) > 99% of residuals are below the
hardware positioning accuracy of actuators
Residuals

19
Conclusions
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
active positioning is performed by means of axial actuators driven by stepper motors
an alignment tracking system provides feedback on the mirrors alignment. It will be used also during calibrations
can operate in stand alone mode or within the Telescope Control System A complete kinematic model predicts system performance, quantifying non-
linearities (dominated by the M1 axial actuator behaviour) A simulation of the calibration procedure shows that it is possible to
describe and correct the image shift induced by mirrors tilt over the whole range allowed by the hardware with a seventh order polynomial, being the residuals well below the mechanical accuracy positioning of the actuators
20
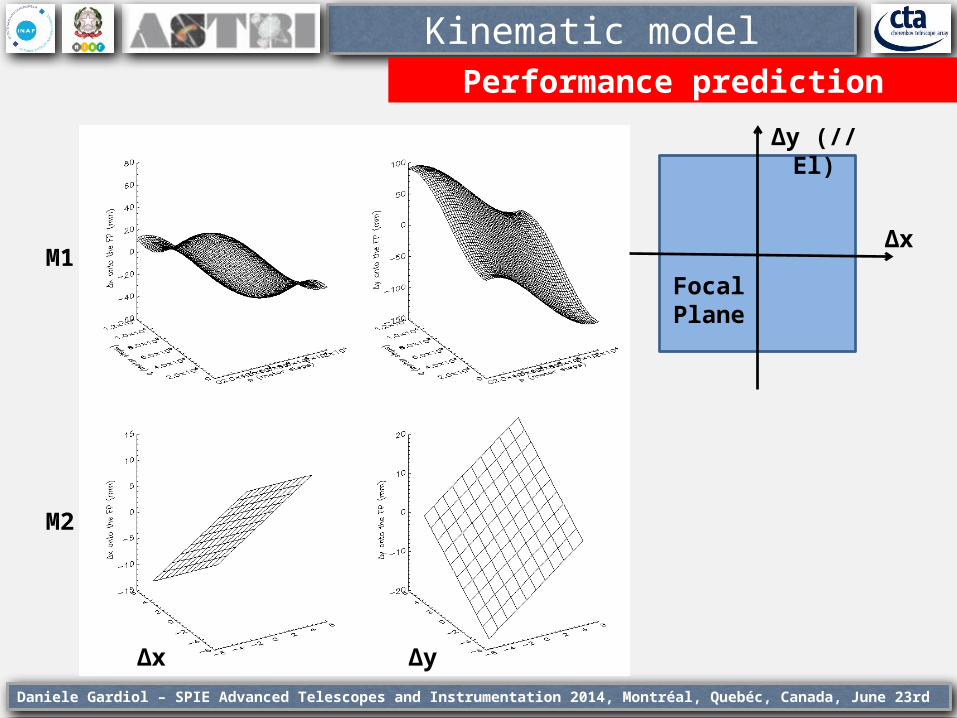
Kinematic modelPerformance prediction
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
M1
M2
Δx Δy
Δy (// El)
Δx
Focal Plane

21
Kinematic modelBackward Analysis
Daniele Gardiol – SPIE Advanced Telescopes and Instrumentation 2014, Montréal, Quebéc, Canada, June 23rd
Comp. inv. function
Residual estimate
KynematicModel (FA)
nm
nmnm
nm
nmnm
yxbyxp
yxayxp
,,2
,,1
),(
),(
]12000,0[,),(
]12000,0[,),(
,2,1,2,1,
,2,1,2,1,
hkhkhk
hkhkhk
ppppyy
ppppxx
Polynomial interpolation up to a suitable order


















