D3.3 – Handbook of best practices for hazard mapping of...
52
SIXTH FRAMEWORK PROGRAMME Project no. 018412 IRASMOS Integral Risk Management of Extremely Rapid Mass Movements Specific Targeted Research Project Priority VI: Sustainable Development, Global Change and Ecosystems D3.3 – Handbook of best practices for hazard mapping of rapid mass movements and practical implications for risk assessment Due date of deliverable: 31/05/2008 Actual submission date: 15/07/2008 Start date of project: 01/09/2005 Duration: 33 months WSL Swiss Federal Institute for Snow and Avalanche Research Revision [1] Project co-funded by the European Commission within the Sixth Framework Programme (2002-2006) Dissemination Level PU Public PP Restricted to other programme participants (including the Commission Services) RE Restricted to a group specified by the consortium (including the Commission Services) CO Confidential, only for members of the consortium (including the Commission Services)
Transcript of D3.3 – Handbook of best practices for hazard mapping of...

SIXTH FRAMEWORK PROGRAMME
Project no. 018412
IRASMOS
Integral Risk Management of Extremely Rapid Mass Movements
Specific Targeted Research Project
Priority VI: Sustainable Development, Global Change and Ecosystems
D3.3 – Handbook of best practices for hazard mapping of rapid mass movements and practical implications for risk assessment
Due date of deliverable: 31/05/2008
Actual submission date: 15/07/2008
Start date of project: 01/09/2005 Duration: 33 months
WSL Swiss Federal Institute for Snow and Avalanche Research
Revision [1]
Project co-funded by the European Commission within the Sixth Framework Programme (2002-2006)
Dissemination Level PU Public PP Restricted to other programme participants (including the Commission Services) RE Restricted to a group specified by the consortium (including the Commission Services) CO Confidential, only for members of the consortium (including the Commission Services)

SIXTH FRAMEWORK PROGRAMME PRIORITY VI
Sustainable Development, Global Change and Ecosystems
SPECIFIC TARGETED RESEARCH PROJECT
IINNTTEEGGRRAALL RRIISSKK MMAANNAAGGEEMMEENNTT OOFF EEXXTTRREEMMEELLYY RRAAPPIIDD MMAASSSS MMOOVVEEMMEENNTTSS
WORK PACKAGE 3:
HAZARD ASSESSMENT AND MAPPING OF RAPID MASS MOVEMENTS
DELIVERABLE D3.3
Hazard mapping of extremely rapid mass movements
A decalogue for best-practice
Edited by: NICOLE BISCHOF, WSL/SLF Contributions by: MARKUS HOLUB, BOKU OLIVER KORUP, WSL/SLF MASSIMILIANO BARBOLINI, UP
JULY 8, 2008

1
SIXTH FRAMEWORK PROGRAMME PRIORITY VI - Sustainable Development, Global Change and Ecosystems SPECIFIC TARGETED RESEARCH PROJECT “IRASMOS” Integral Risk Management of Extremely Rapid Mass Movements (contract n. 018412) DELIVERABLE D3.3 Hazard mapping of extremely rapid mass movements A decalogue for best practice Edited by: NICOLE BISCHOF SWISS FEDERAL INSTITUTE FOR SNOW AND AVALANCHE RESEARCH SLF, DAVOS, SWITZERLAND Contributions by: MASSIMILIANO BARBOLINI UNIVERSITY OF PAVIA, ITALY
OLIVER KORUP SWISS FEDERAL INSTITUTE FOR SNOW AND AVALANCHE RESEARCH SLF, DAVOS, SWITZERLAND
MARKUS HOLUB UNIVERSITY OF NATURAL RESOURCES AND APPLIED LIFE SCIENCES, AUSTRIA Reviewed by: HANS ROMANG, WSL/SLF SWISS FEDERAL INSTITUTE FOR SNOW AND AVALANCHE RESEARCH SLF, DAVOS, SWITZERLAND
VIDAR KVELDSVIK, NGI NORWEGIAN GEOTECHNICAL INSTITUTE, NORWAY
MARC SCHÄR, WSL/SLF SWISS FEDERAL INSTITUTE FOR SNOW AND AVALANCHE RESEARCH SLF, DAVOS, SWITZERLAND

2
TABLE OF CONTENTS
LIST OF FIGURES ............................................................................................................................. 3 LIST OF TABLES............................................................................................................................... 5 EDITOR'S FOREWORD .................................................................................................................... 6
A DECALOGUE FOR DEBRIS FLOW HAZARD MAPPING ................................................................. 7 DF.1 Verification of dominant flow process (i.e. distinction between occurrence of fluvial sediment only or also of debris flows which can reach the fan area / area at risk) .............................. 7 DF.2 Fundamentals and knowledge of local conditions ............................................................... 8 DF.3 Description of existing/collected data and other pertinent documents............................... 10 DF.4 Triggering of debris flows.................................................................................................. 11 DF.5 Debris-flow occurance - return period ............................................................................... 12 DF.6 Debris-flow occurance - magnitude ................................................................................... 13 DF.7 Determination of scenarios and estimation of debris flow volumes .................................. 14 DF.8 Selection of method for runout prediction (simple empirical vs. numerical simulation models) 15 DF.9 Generation of hazard map .................................................................................................. 17 DF.10 Consideration of residual risk and uncertainty.................................................................. 17
A DECALOGUE FOR ROCK-AVALANCHE HAZARD MAPPING..................................................... 19 RA.1 Rock-avalanche hazard: Outline of the problem................................................................ 19 RA.2 Common misconceptions................................................................................................... 21 RA.3 Causes and triggers ............................................................................................................ 21 RA.4 Geomorphic evidence ........................................................................................................ 22 RA.5 Existing databases.............................................................................................................. 23 RA.6 Quantifying rock-avalanche hazard ................................................................................... 23 RA.7 Uncertainties in regional-scale hazard assessment............................................................. 28 RA.8 Determining rock-avalanche runout................................................................................... 29 RA.9 Pending issues.................................................................................................................... 30 RA.10 Conclusions........................................................................................................................ 32
A DECALOGUE FOR SNOW AVALANCHE HAZARD MAPPING .................................................... 34 SA.1 Avalanche hazard: outline of the problem ......................................................................... 34 SA.2 Avalanche release areas ..................................................................................................... 35 SA.3 Avalanche fracture depths.................................................................................................. 36 SA.4 Avalanche sizes.................................................................................................................. 37 SA.5 Avalanche indicators.......................................................................................................... 38 SA.6 Avalanche dynamical behaviour and runout distance........................................................ 40 SA.7 Avalanche intensity............................................................................................................ 41 SA.8 Effects of countermeasures on avalanche hazard............................................................... 43 SA.9 Return period and encounter probability............................................................................ 45 SA.10 Magnitude frequency relationship...................................................................................... 45
References.............................................................................................................................................. 47

3
LIST OF FIGURES
Figure 1.1: Phase diagram of torrential processes (ONR 24 800, 2007)................................................. 8 Figure 1.2: Scetch of a debris flow surge (Pierson, 1986; modified) ...................................................... 8 Figure 1.3: Shape of levees (Ancey, 2001; modified)............................................................................. 8 Figure 1.4: Phenomena identified in the field allow for an assessement of relevant processes (Hübl,
2006).............................................................................................................................................. 9 Figure 1.5: Contaminated laundry aims at recalculating the maximum flow depth of a flood event.... 10 Figure 1.6: Different detail levels in event documentation after DIS-ALP........................................... 11 Figure 1.7: Three typical debris-flow initiation mechanism (from VAW, 1992): bed erosion and
fluidisation, slope instability, temporary blocking of water and solid discharge......................... 12 Figure 1.8: Flow chart for estimating debris flow parameters by means of empirical formulae
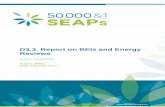
(Rickenmann, 1999) .................................................................................................................... 16 Figure2.1. Relationship between swash (= run-up) height of rock-avalanche deposits and the total
deposit volume for n = 65 events documented in the literature (based on the inventory compiled by Korup et al., 2007). Using the simple principle of energy conservation (which disregards additional frictional or fragmentation energies) allows determining the maximum velocity of the rock avalanche in motion. This inferred maximum velocity tends to systematically increase with total volume mobilised. ............................................................................................................... 20
Figure2.3. Exposure of rock-avalanche deposit composed of highly fragmented greywacke and argillite, Crow River, Southern Alps of New Zealand. Scarp is ~100 m high and marks the maximum height of this former and now breached natural dam. Scree slopes indicate continued reworking of highly angular rock-avalanche debris. ................................................................... 22
Figure2.5. Map of the 1.3 × 1010 m3 Flims rockslide/rock avalanche (grey shaded), which is the largest catastrophic rock-slope failure in the European Alps. The landslide occurred in gently dipping carbonate rocks of the Flimserstein (thick black line indicates headscarp) ~9,000 yr before present and blocked the Alpenrhein, forming a natural dam >400 m high, which impounded a large, ephmeral lake (after von Poschinger, 2005). Dotted areas delineate a number of smaller rock-slope failures that mostly post-date the Flims event. .......................................................... 23
Figure2.7. Rock-avalanche volume as a function of its return period (red curve) derived from a dataset of n = 14 Holocene events with volumes V >V0 = 2 × 107 m3 in a study area in the Central Southern Alps, New Zealand (Whitehouse, 1983). Secondary y-axis indicates probability of occurrence (i.e. hazard) of an event with known return period within 1, 10, and 100 yr (colour-coded straight lines). The inferred annual probability of rock-avalanche occurrence for this size range lies mainly between 10–3 and 10–4...................................................................................... 25
Figure2.9. Dependence of landslide probability densities p on landslide planform area AL, for three substantially complete landslide inventories: (1) n = 11 111 landslides triggered by the 17 January 1994 Northridge earthquake, California, USA (open squares); (2) n = 4233 landslides triggered by a snowmelt event in Umbria, Italy, January 1997 (open circles); (3) n = 9594 landslides triggered by heavy rainfall from Hurricane Mitch, Guatemala, October/November 1998 (closed diamonds; for data sources see Malamud et al., 2004). Note that density frequency of larger landslides, i.e. with AL >10–2 km2 can be approximated with an inverse power law (straight line in log-log space). Inset shows the same distribution on linear axes. ...................... 26
Figure2.11. Frequency density as a function of planform area of n = 277 rock avalanches, and n = 82 volcanic debris avalanches collected from worldwide data (based on data compiled by Korup et al., 2007). Also shown are a subset of n = 71 large (and mainly catastrophic) rockslides in the European Alps, and n = 89 rockslides in the Alpenrhein catchment and its surroundings, Central European Alps. Data points with orange outlines (rollovers) were not included in this analysis because of likely undersampling. Straight colour-coded lines indicate best fit of inverse power-law models valid over two orders of magnitude. Note that the scaling exponents αA for all rock-avalanche data overlap within one standard deviation (± 1 σ), irrespective of the different timescales, tectonic and climatic regimes, and topographic characteristics encompassed by these datasets; mL indicates the landslide magnitude scale (see Malamud et al., 2004 for discussion), and highlights potential deviations of the data trends from the inverse gamma model applied to substantially complete landslide inventories (grey subparallel lines indicate power-law tails of this distribution for various values of mL). .................................................................................. 27

4
Figure2.13. Average annual frequency density as a function of landslide volume of n = 70 large catastrophic landslides (including rock avalanches) that occurred in China during the 20th century (Wen et al., 2004), n = 44 Holocene rock avalanches in the Southern Alps of New Zealand (Whitehouse, 1983), and n = 68 Holocene landslides in the European Alps (Abele, 1974; Korup et al., 2007, Prager et al., 2008). Geometric mean (GM) regression lines indicate inverse power-law relationship (with exponent value –αV) over more than three orders of magnitude (in the case of the European Alps), and may be used to quantify to first order rock-avalanche hazard in these study regions. ..................................................................................... 28
Figure2.15. Oblique view of shaded 25-m digital elevation model containing the distribution of modelled maximum flow height of the 1999 Mount Adams rock avalanche (1.5 × 107 m3), Poerua River, Southern Alps of New Zealand. Grey elevation contours are spaced at 100-m intervals. This rock-avalanche event was modelled with software that—with some minor modifications—is also capable of modelling snow avalanches and debris flows. Numerical model simulations of this kind are not only sensitive to the choice of model parameters, but also the accuracy of the initial conditions, specified here by shape and average depth of the detaching rock mass. .................................................................................................................................... 30
Figure2.17. Relationship between local relief H and volumes of catastrophic landslides (>108 m3) in selected mountainous terrain. Black curves are cumulative percentage distributions of H >300 m normalized by area. Grey boxes delimit ±1 σ of H about the orogen-scale mean (horizontal line). Hatched histograms show fraction of total landslide volume. Error bars delineate ±1 σ of H within 15-km radius around each landslide data point. White circles and black diamonds in Andes data are landslides in glaciated and non-glaciated terrain, respectively; grey triangles are volcanic landslides. Additional hatched area for New Zealand data applies to South Island only; white circles and black diamonds are North and South Island landslides, respectively (after Korup et al., 2007)....................................................................................................................... 31
Figure2.19. Field photograph of active 6- to 10-m wide tension headscarp of Åkneset rockslide (estimated active area is 650,000 m2), Storfjorden, Norway. This rock-slope failure has historically been dominated by creep motion (Blikra et al., 2005), and there are elevated concerns that this type of movement may deteriorate to a rapid rock slide/rock avalanche. ....... 32
Figure 3.1 – An example of large avalanche affecting a densely inhabited valley bottom, “Lavancher” avalanche, Morgex, Aosta Valley, Italy. On the left picture the deposit of the 1999 event, on the right image an indication of the maximum avalanche outline and of the main exposed elements (pictures by courtesy of Avalanche Office of Aosta Valley Region) .......................................... 35
Figure 3.2 – An example of slab release, with a fracture depth of about 2 meters (by courtesy of Apatit Avalanche Centre, Kirowsk, Russia)........................................................................................... 37
Figure 3.3 – Photo of an avalanche event with an indication of the avalanche maximum outline, “Trabuchello avalanche” (1986), Brembana Valley, Central Italian Alps (Photo: M. Barbolini)38
Figure 3.4 – Example of trimline between a mature forest and regenerating conifers.......................... 39 Figure 3.5– A building destroyed by the Galtuer (A) 1999 avalanche (photo: WLV Tyrol). ............... 42 Figure 3.6: Procedure for the quantification of the effectiveness of snow supporting structures (after
Romang and Margreth, 2006)...................................................................................................... 44 Figure 3.7 – Relationship between avalanche frequency and magnitude (after Jamieson, 2001) ......... 46

5
LIST OF TABLES
Table 1.2: Tentative estimated channel debris yield rates in western Canada (Hungr et al., 1984)....... 14 Table 3.1 - Guidelines for starting zone incline..................................................................................... 35 Table 3.2 - Guidelines for protective forest ........................................................................................... 36 Table 3.3 – Size of the avalanche, classified by runout length, volume and destructive potential. ....... 37 Table 3.4 – Vegetation as an avalanche-frequency indicator (after Mears, 1992)................................. 39 Table 3.5 – Typical dry snow avalanche maximum velocity, after Mears (1992) ................................. 41 Table 3.6 – Cd for small obstacles as a function of obstacle cross-section shape (values applicable to
dense and powder avalanche) ........................................................................................................ 42 Table 3.7 - Correlation between avalanche impact pressure and potential damages ............................. 42 Table 3.8 - Typical intensity classes in hazard mapping........................................................................ 42

6
EDITOR'S FOREWORD
Hazard mapping is a well-known and widely applied methodology in hazard assessment and management. Hazard maps are used for spatial planning in consistence with hazardous areas, for assessing risks, and for planning of mitigation measures and intervention. In this work package current knowledge and recent approaches to mapping snow and rock avalanche and debris flows as hazards are summarized, evaluated, and rationalized. The result is a state-of-the-art report on hazard mapping of extremely rapid mass movements in Europe (deliverable D3.1). The deliverable at hand, this “decalogue” lists the 10 most important subjects for hazard mapping of snow avalanches, debris flows and rock avalanches. It furthermore summarizes the present state-of-the-art and “best practice” mapping methods as well as the practical implications for risk assessment. An essential prerequisite for hazard mapping is understanding the process dynamics and their interaction with built structures. As with forecasting, more is known about the processes involved in snow avalanches, debris flow, and rock avalanches. There is also more data available and the resulting hazard maps are thus more accurate. The field of hazard mapping was pioneered when snow avalanches were first mapped in the 1950s. In contrast, the development of hazard maps for rock avalanches is extremely difficult, because they occur infrequently and it is difficult to quantify run-out zones. Not only are there discrepancies between the reliability of the hazard mapping of the different processes, but there are also considerable differences between the IRASMOS countries. The long-term aim is to propose a European-wide standard for hazard mapping and quantifying hazard levels of extremely rapid mass movements. However, European harmonization of hazard mapping approaches and criteria will probably be much more challenging than it has been with forecasting and warning. The reason is that hazard maps tend to have considerable economic impact on land-use planning because they influence land prices. The economic consequences of even a small modification of a map may be considerable. Such harmonization initiatives and the future scope of the European-wide implementation of commonly accepted rules of “best practice” for effective disaster reduction with respect to extremely rapid mass movements were discussed at the “IRASMOS Round Table on Integral Risk Management” in Chamonix-Mont-Blanc, France, in January 2007. This meeting brought together stakeholders in the field of risk and crisis management with respect to rapid mass movements, such as scientists, practitioners, natural resource planners and decision-makers. One of the main issues emphasized by many of the experts of rapid mass movements is short-term risk management. This includes early warning, artificial release (for snow avalanches) and intervention measures, which are intimately connected with settlement structures and therefore hazard mapping. As a consequence of several incidents with fatalities, particularly during the avalanche winter 1999, the central role of good documentation of the decisions made when an incident occurs became apparent. The experts agreed that, almost irrespective of country, clearer definitions of tasks and institutional responsibilities were needed. Long-term risk management, in contrast, seems to be heavily dependent on political decisions. For these a sound scientific basis is all the more important, although it takes time for them to feed into practice.
Davos, July 08, 2008
Nicole Bischof

7
Chapter 1 A DECALOGUE FOR DEBRIS FLOW
HAZARD MAPPING
Markus Holub
DF.1 Verification of dominant flow process (i.e. distinction between
occurrence of fluvial sediment only or also of debris flows which can reach
the fan area / area at risk)
The transport mechanism in torrent catchments can be classified into fluvial, debris flow like, sliding, and falling dislocation (ONR 24 800, 2007). A general classification can be made depending on the relative concentration of water, fine and coarse sediment, as first suggested by Phillips and Davies (1991) (Fig.1.1).

8
Figure 1.1: Phase diagram of torrential processes (ONR 24 800, 2007)
As suggested by Bergmeister et al. (2008) and defined in the Austrian standard ONR 24800 (2007), debris flows are highly-concentrated mixtures of water, fine and coarse sediment, and frequently woody debris. The coarse sediment is usually concentrated in the upper layers and at the front of the flow (Fig. 1.2; Fig. 1.3). The sediment concentration reaches values up to the plastic limit, but is often between 40 and 70 % by volume. The specific bulk density of the mixture amounts to 1.7-2.4. The flow is characterised as unsteady and non-uniform, and typically debris flows occur in one to five surges (e.g., Pierson, 1986; Johnson, 1984). The flow behaviour is generally termed ‘non-Newtonian’, indicating that standard hydraulic models are not capable to describe the flow satisfyingly. The event volumes of debris flows vary considerable between several thousand to some hundred thousand cubic metres.
Debris flows can be roughly classified due to the relative concentration of fine and coarse sediment by the prefix ‘viscous/muddy’ or ‘granular/stony’ to describe the main flow behaviour (e.g., Takahashi, 1991; Coussot and Meunier, 1996; Ancey, 2001).
Figure 1.2: Scetch of a debris flow surge (Pierson, 1986; modified)
Figure 1.3: Shape of levees (Ancey, 2001; modified)
DF.2 Fundamentals and knowledge of local conditions
With respect to the hazard assessment of torrent catchments, it is important to determine whether debris flows are likely to occur or not. Debris flow hazard recongnition is a first important step and may be based

9
on the following elements (Jakob, 2005):
• geomorphic evidence, including also the appearance of the alluvial or colluvial fan • aerial photographs, satellite imagery, topography • geomorphology and topography • historical accounts and records
Hazard maps do not refer only to one particular hazardous process, rather they consider all potential hazards which might occur in the relevant area. Moreover, all conceivable threats to settlements and infrastructure facilities due to natural hazards are visualized. Getting familiar with the catchment´s properties has to be seen as fundamental for the subsequent hazard mapping procedure to be applied. Besides considering available documentations like chronicles and geomorhological hints (“silent witnesses”) as basic information about the catchment, it is indispensable to characterize the relevant gravitational mass movements within the investigated area. These can be exercised by identifiying phenomena and characteristics in the field (Fig. 1.4). Phenomena are events which are observable and caused by processes, so the processes can be characterised by key phenomena or “silent witnesses”. Characteristics can be regarded as measurable attributes of phenomena and thus contribute to quantify processes.
Figure 1.4: Phenomena identified in the field allow for an assessement of relevant processes (Hübl, 2006).
Being capable of recognizing phenomena and characteristics of natural hazard processes in the field demands not only expert knowledge but also great experience. To obtain this experience, every debris flow event should be seen as a chance to study local properties by investigating the specific phenomena and characteristics and discussing these local debris flow properties with colleagues. Occasionally, the same transport processes can show different properties even within the same catchment. Hence, studying the attributes of single catchments and comparing the results with adjacent catchments can widen the knowledge horizon extremely.
The history of mitigation measures within the inquired catchment is from further interest. Well documented archives about the mitigation concept with its single strucures and their functional objectives are the base for an assessment of the efficiency of the efforts undertaken in former times. For each of them, it is necessary to control its general state, its design hypothesis, the frequency of keeping it in order actions, its behaviour during past events and the existence of some indentified person or service in charge of keeping it in order, when such information is known. Field investigations allow an evaluation of the condition of the single structures, which aims at developing future strategies of protection and estimating the maintenance costs for the mitigation concept.

10
DF.3 Description of existing/collected data and other pertinent documents
For generating hazard maps experts revert to diverse sources. They collect and analyse all available data and furthermore, they investigate the study sites to obtain better knowledge of the catchment considering landscape properties and sources of hazard. Chronicles and old notes about catastrophic events (“historical approach”) are taken into account as well as expertises and detailed analyses of geology, hydro-geology, geomorphology, hydrology, meterology and soil mechanics. Random observations and oral tradition of affected people and people familiar with the area represent valueable hints (“interview approach”). Geomorphological indications and “silent witnesses” can help in reconstructing historical events as well as actual processes (Fig. 1.5).
Figure 1.5: Contaminated laundry aims at recalculating the maximum flow depth of a flood event.
For analyzing historical documentations or to carry out future event documentations subsidiary instructions like the “5W-Standard” (DIS-ALP, 2006) facilitate the registration of important impressions in the field (Fig. 1.6).

11
Figure 1.6: Different detail levels in event documentation after DIS-ALP.
DF.4 Triggering of debris flows
With respect to the hazard assessment of torrent catchments, it is important to determine whether debris flows are likely to occur or not. The basic requirements for the occurrence of debris flows are steep slopes, sufficient volumes of debris material relatively easy to mobilize, and sufficient water to trigger the flow. Due to this, determination of major zones of potential sediment sources and possible interactions with related hazards should be one of the first tasks in the field to obtain knowledge of “hot spots” in the catchment of interest.
Main triggering mechanism of debris flows can be seen in:
• Land slides at different scales • Lateral and side erosion • Liquefaction of the channel bed • Collaps of channel blockings
In general, three typical initiation mechanisms can be distinguished (Fig. 1.7): (a) gradual or sudden entrainment of solid material by bed and bank erosion, possibly including a partial fluidisation of the bed; (b) slope instability, initiating a landslide which transforms into a debris or mud flow; and (c) a temporary blocking of the solid discharge in a stream channel. The blocking may be associated with pulsing bed load movement including coarse particles, and with channel constrictions, possibly favoured by woody debris. Alternatively, it may be caused by a sudden input of a large mass of solid material, either through a slope failure or by a debris flow from a tributary channel.

12
Figure 1.7: Three typical debris-flow initiation mechanism (from VAW, 1992): bed erosion and fluidisation, slope instability, temporary blocking of water and solid discharge
Mountain torrents are often characterised by a very irregular channel morphology. Channel constrictions may be due to large boulders or bedrock outcrops. At such locations a temporary blockage of water and sediment flow may occur, possibly favoured by the presence of woody debris. The combination of woody debris and coarse particles is very effective in blocking a flow path, as is known from slit type outlet structures of sediment retention basins. Upstream of the temporary blockage, more sediment is accumulated until the pressure is sufficient to cause a collapse, suddenly releasing large quantities of sediment and water. Such a “dam-break” flow can transform into a debris flow.
Glacial lake outburst floods (GLOF’s) are characterised by the release of large quantitites of water and much greater peak flows as compared to a rainfall-induced flood in the same catchment. Below moraine-dammed lakes there are often ideal conditions for the intitation of debris flows: steep gradients and and easily erodable material with a wide grain size distribution. Therefore, many of the largest debris flows observed in alpine environments are the result of glacial lake outburst floods (Haeberli, 1983).
DF.5 Debris-flow occurance - return period
At present, there are no rigorous methods which would allow a strict assessment to determine an exact probability of debris-flow occurrence, be it based either on physically measured characteristics of a

13
catchment or on a statistical analysis. If there is information available on past debris flow events, this is often the most reliable indication. It is noted that the concept of „recurrence intervals“, as borrowed from flood frequency analysis, may be problematic when applied to debris flow events (Davies, 1997). For example, temporary storage of sediments may be of importance, and thus an event may depend on previous ones. If information on historic events is available, it may be possible to determine a characteristic pattern between debris flow frequency and debris-flow volume for a particular catchment (Zimmermann et al., 1997a, b).
In most torrents, no measurements are available on past events. Nevertheless, a semi-quantitative or qualitative assessment of past events should be made as far as possible. Such an assessment may be based on historic documents (e.g. written documents from forest, torrent control, or river services), or on interviews with the local population. A terrain analysis, possibly supported by maps and aerial photographs and including the interpretation of geomorphic features (“silent witnesses”), can also give information on past events. These assessments are essential for determining a magnitude-frequency pattern of a given torrent and may also help to delimit endangered areas.
DF.6 Debris-flow occurance - magnitude
A detailed assessment of a potential future event magnitude often requires field investigations. On the one hand, reconstruction of past events may be improved by an interpretation of geomorphic features and debris flow deposits. On the other hand, the potential magnitude of a future event is estimated most reliably by mapping and assessing all possible sediment sources which may trigger or feed a debris flow. The interdisciplinary character of the phenomenon and of the triggering processes ideally requires studying the geomorphology, geology and lithology, channel network and hydrology, and vegetation of a torrent catchment. A very rough estimate of a potential (extreme) event magnitude may be made with empirical relationships which are generally based on morphometric parameters of the catchment. Several relationships are listed in Table 1. However, these relations can only give either a "maximum" or a mean value of a potential event magnitude, since its variability for a given catchment area is very large, typically covering several orders of magnitudes.
M Maximum event magnitude [m3]
Ma Average event magnitude [m3]
Ac Catchment area [km2]
Sc Mean channel slope [-]
Sf Mean fan slope [-]
Lc Length of active channel [m]
K Torrentiality factor [-]
IG Geologic index [-]
N Number of events [-]
Formula N Source
M = K Ac 100 Sc 1420 Kronfellner-Kraus (1984); Kronfellner-Kraus (1987)
M = 37000 Ac0.78 ~ 65 Zeller (1985; “extreme
conditions for sediment yield”)
Ma = 150 Ac (100 Sf -3)2.3 15 (*) Hampel (1977)
M = Lc (110 - 250 Sf) 82 Rickenmann and Zimmermann (1993)
Ma = 13600 Ac0.61 551 Takei (1980)
Ma = 29100 Ac0.67 64 D’Agostino (1996)
Ma = 70 Ac Sc1.28 IG 64 D’Agostino & Marchi (2001)
M Maximum event magnitude [m3]
Ma Average event magnitude [m3]
Ac Catchment area [km2]
Sc Mean channel slope [-]
Sf Mean fan slope [-]
Lc Length of active channel [m]
K Torrentiality factor [-]
IG Geologic index [-]
N Number of events [-]
Formula N Source
M = K Ac 100 Sc 1420 Kronfellner-Kraus (1984); Kronfellner-Kraus (1987)
M = 37000 Ac0.78 ~ 65 Zeller (1985; “extreme
conditions for sediment yield”)
Ma = 150 Ac (100 Sf -3)2.3 15 (*) Hampel (1977)
M = Lc (110 - 250 Sf) 82 Rickenmann and Zimmermann (1993)
Ma = 13600 Ac0.61 551 Takei (1980)
Ma = 29100 Ac0.67 64 D’Agostino (1996)
Ma = 70 Ac Sc1.28 IG 64 D’Agostino & Marchi (2001)
Table 1.1: Empirical relationships to estimate the event magnitude of debris flows and/or torrential floods with sediment transport.
Typically, most of the sediments feeding a debris flow originate from locations close to the channel or from channel erosion. Therefore, another simple method consists in estimating maximum channel debris yield rates along characteristic reaches, and summing them up over the expected flow length. Tentative

14
channel debris yield rates are given by Hungr et al. (1984) based on observations in western Canada (Table 2). For some larger debris flow events in Switzerland, mean sediment yield per length of active channel were from 40 m³/m to 90 m³/m, and locally eroded cross-sections of 500 m² to 650m² were observed (Rickenmann & Zimmermann, 1993).
1 Prior to the expected debris torrent event2 For drainage areas of 1 – 3 km²
Not applicable
Up to 200 (consider as point source)
Side slopes potentially unstable
(landslide area)
Talus, over 20 m high
Deep talus or moraine10 – 20 E
15 – 3015 – 20Side slopes at repose
Talus, over 5m high
Deep talus or moraine10 – 20D
10 – 1510 – 15StableLess than 5m high
Deep talus or moraine10 – 20C
5 – 105 – 10StableNonerodible(bedrock)
Thin debris or loose soil over bedrock
10 – 20B
0 – 50 – 5Stable, practically bare of soil coverNonerodible Bedrock20 – 35A
Erodibilitycoefficient [m³/(m.km)]
Channel debris yield rate2 [m³/m]
Stability condition1Side slopesBed material
Gradient [deg]
Channel type
Not applicable
Up to 200 (consider as point source)
Side slopes potentially unstable
(landslide area)
Talus, over 20 m high
Deep talus or moraine10 – 20 E
15 – 3015 – 20Side slopes at repose
Talus, over 5m high
Deep talus or moraine10 – 20D
10 – 1510 – 15StableLess than 5m high
Deep talus or moraine10 – 20C
5 – 105 – 10StableNonerodible(bedrock)
Thin debris or loose soil over bedrock
10 – 20B
0 – 50 – 5Stable, practically bare of soil coverNonerodible Bedrock20 – 35A
Erodibilitycoefficient [m³/(m.km)]
Channel debris yield rate2 [m³/m]
Stability condition1Side slopesBed material
Gradient [deg]
Channel type
Table 1.2: Tentative estimated channel debris yield rates in western Canada (Hungr et al., 1984).
DF.7 Determination of scenarios and estimation of debris flow volumes
In assessing natural hazards like debris flows, there are often major uncertainties both in establishing an appropriate magnitude-frequency relationship and in the assessment of the flow and deposition behaviour. In addition, there may be a strong interaction with other processes or elements such as bedload transport
and woody debris, further complicating the assessment. It can therefore be necessary to work with scenarios. For example, the presence of woody debris may lead to a blockage of the flow in the torrent channel underneath a bridge, resulting in overtopping of the flow on the fan. On the contrary, without woody debris the channel conveyance capacity may be sufficient to carry the estimated debris-flow
discharge for the same event. Such scenarios also have to be associated with a probability of occurrence.
It is important to take into account this uncertainty related to different scenarios for some of which it can be very difficult to assign a probability. Therefore, it is necessary to explicitly define which probability
value is used in the set of calculations. Several methods have been proposed to estimate the likelihood of debris flow occurrence in a particular torrent catchment (e.g., Aulitzky, 1973, 1980, 1984; Nakamura,
1980; VanDine, 1985; Rickenmann and Zimmermann, 1993). However, there are no rigorous methods that allow a strict assessment to determine an exact probability of debris flow occurrence so far, neither based on physically measured characteristics of a catchment nor based on statistical analyses. The information
available on past debris flow events is often the most reliable indication (Rickenmann, 1999).
However, human reasonning still has a paramount importance in hazard mapping procedures. For this reason it is important to include information about the assumptions regarding different scenarios which
form the basis of a precise delineation of hazard zone, in order to make the hazard mapping process transparent, documenting also somewhat "subjective" decisions which are based on the experience of the
expert(s) responsible for the hazard mapping.

15
If several hazardous processes can occur in the same area, the final hazard map will result from overlaying the danger levels of all processes, and the most unfavourable danger level will be retained on the map. However, it is important that also a technical report is produced which describes all steps and methods used to construct the hazard map. This documentation helps to understand the assumptions, arguments and calculations which form the basis of the hazard assessment. Furthermore, it is also important to clearly show uncertainties of the assessment. Both the establishment of magnitude-frequency relations and the assessment of the flow behaviour are associated with uncertainties. Therefore, the resulting hazard zones should ideally be related to probability distributions which reflect for example the uncertainties of flow magnitude and of the occurrence of scenarios.
With respect to hazard evaluation, the potential debris flow volume is the most important parameter. Many attempts had been made to estimate a maximum debris flow volume for a given torrent catchment using empirical relations (e.g., Rickenmann and Zimmermann, 1993; Hampel, 1977; Kronfellner-Kraus, 1984, 1987; Zeller, 1985; D`Agostini, 1996). Rickenmann (1999) showed that that these attempts may overestimate the actual debris flow volume up to a factor of 100. It is therefore recommended to conduct a geomorphologic assessment of the catchment to estimate the possible volume of material to be susceptible to mobilisation. Subsequently, the debris flow volume can be used to derive an estimate of the associated peak discharge, the total travel distance, and the runout distance on the fan (e.g., Ikeya, 1989; Mizuyama et al., 1992; Schilling and Iverson, 1997). A compendium on such empirical relationships for debris flows can be found in Rickenmann (1999).
However, some limitations occur by applying these empirical approaches. Often calculated for specific regions and originating from individual case studies, empirical relations are not necessarily applicable to other regions. Furthermore, complex flow mechanisms which are important for a quantitative (small-scale) risk analysis cannot be mirrored or modelled. Therefore, dynamic simulation models are an alternative tool to estimate debris flow parameters relevant for hazard analysis.
DF.8 Selection of method for runout prediction (simple empirical vs.
numerical simulation models)
Formerly, the relevant design event as a base for generating hazard maps was defined by “estimation” and experience. Nowadays, the experts have access to numerical methods, which aim additionally at decision making. In such a manner, the interactive relationships between vegetation, soil, precipitation and discharge can be described by rainfall-runoff-models. Further, hydraulic models, which respect the hydrologic parameters of the catchment, the channel properties as well as existing structures and planned mitigation measures deliver very precise results.
At the watershed scale, the magnitude of channel-based hazard processes is often expressed by the measured geomorphic features, such as potential debris volume, mean flow velocity, peak discharge, and runout distance. For this purpose, empirical and semi-empirical equations may be used. As an alternative dynamic (often numerical) simulation models might be considered to assess the flow properties and the depositional behaviour (e.g Hungr, 1995). Rickenmann (1999) proposed a flow chart for estimating debris flow parameters with the help of empirical formulae (Fig. 1.8).

16
Figure 1.8: Flow chart for estimating debris flow parameters by means of empirical formulae (Rickenmann, 1999)
Dynamic simulation models are used to calculate the spatial distribution of debris flow susceptibility within user-defined boundary conditions based on a mathematical formulation defining the material (flow) behaviour (e.g., rheological or friction models, single or multiphase flow models, etc.). A variety of flow resistance laws describing the flow behaviour of debris flows have been proposed and are still subject of research.
Analytical solutions are applied to predict the runout of a debris flow using simplified approaches. Hungr et al. (Hungr et al. 1984) and Takahashi (Takahashi, 1991) described theoretical equations to estimate the runout length for debris flows on the fan assuming constant width and slope along the entire flow path. Due to inherent simplifications analytical models can only be applied when the main surge of the debris flow is expected to travel in the channel to the lowest point of deposition with essentially no change in flow width.
Numerical simulation models are based on 1- and 2-dimensional continuum mechanical equations (e.g., depth averaged ‘shallow water’ equations). In particular for modelling the spatial deposition pattern on the fan, which is important for delineation of hazard zones, a 2-dimensional simulation is preferable. In practice a widely-used code is the commercially available software Flo-2D based on the quadratic rheologic model (O`Brien et al., 1993; Julien et al., 1997). It has been criticised that single phase models – such as the Flo-2D model – are based on strong simplifications and do not reflect mechanics and characteristics of debris flows accordingly. Detailed comparisons of different single phase-approaches can be found in Naef et al. (2006) and Rickenmann et al. (2005).
Physically based models – where the solid and the fluid components are modelled separately – have been recently proposed (e.g., Iversen et al., 2001; Pitman and Le, 2005; Pudasaini et al., 2005). In practical application these models are not yet used due to the complexity of the approaches. Furthermore, necessary parameters such as the matrix permeability or the pore-water pressure are not easily assessable (Parson et al., 2001).
If calibrated by well documented former events, numerical simulation based on basic rheologic models is a helpful tool in hazard assessment as long as necessary coefficients can be measured or back-calculated

17
from past events in the same channel (Coussot et al., 1998; Kaitna et al., 2007). However, the main disadvantage is the high demand for precise data, which is often not available in view of the costs involved, the complexity of the natural terrain as well as the properties of the flowing material.
In this context, one must not forget, that the precision of the results are characterised by a strong dependency on the accuracy of the input data. As a result it seems reasonable to use several numerical models and to crosscheck the results´ plausibility not only in office but also in situ. Furthermore, empirical methods can be used for verification of numerical models and vice versa.
DF.9 Generation of hazard map
The first stage of generating hazard maps can be seen in the preliminary determination of areas to be affected by debris flow deposits and the verification of these assumptions by field inspection.Furthermore, the concepts of the “historical approach” and the “interview approach”, as well as geomorphological indications and “silent witnesses” serve as valueable tools for obtaining better knowledge of past and actual processes within the investigation site (see DF.3).
These investigations should be followed by more detailed calculations including the determination of intensity parameters (e.g. velocity, flow depth) with their spatial distribution. Hence, numerical models are a worthful instrument for calculating velocity, flow depth and deposition height of debris flows and consequently aim at delimiting hazard zones.
Criteria for the delineation of the hazard zones can be:
• Deposition height of sediments • Depth of erosion tracks • Energy line of the dynamic flow • Dynamic load due to transported solids • Static load due to depositioned sediments and static flood
The boundary conditions in the catchment as well as the criteria and methods used for delimiting hazard zones should be proved regularely to their topicality and adopted where required.
DF.10 Consideration of residual risk and uncertainty
Assessing hazard processes requires experience, which only can be obtained by continous training. Even adjoining catchments can show varying conditions and properties. As a result, a wide range of uncertainty in assessing the present situation exists. Generally, watersheds are subject to continous modifications, in particular regarding the sediment potential. The steady alteration of sections characterised by erosive, accumulative or transportational processes hamper the prediction of development tendencies of the catchment. Due to this fact, regular inspectations of the catchment area as well as the channel system considering the boundary conditions of the hazardous processes are indispensable. Regarding this, monitoring systems can serve as a avalueable tool.
Usually, a particular design event serves as the planning base for mitigation measures against natural hazards. Calculation methods leading to this design event are not only very complex, rather the results seem to develop more and more uncertainities, the longer the calculation methods are not adopted regulary to current demands. Furthermore, due to a limited lifetime and therefore an increasing complexity of

18
maintenance in high-mountain regions, future feasibility of technical structures is restricted due to a scarceness of financial resources provided by responsible authorities (Weinmeister, 1994). If maintenance is neglected, mitigation measures will become ineffective and can even increase the catastrophic potential of natural hazards (Aulitzky, 1970).
Since conventional technical measures do neither guarantee reliability nor complete safety (Schmid, 2005),
a residual risk of damage to buildings, infrastructure and harm to people remains (Fell, 1994; BMLFUW,
2006). Even if such mitigation measures may reduce short-term losses, the long term vulnerability might
increase due to an enhanced attraction of “secured” areas for settlement activities and institutional
investors (Mileti and Myers, 1997).
As a result, experts and local authorities should carry out emergency plans and increase the residents´ preparedness by regulary information about natural hazards, mitigation measures and their residual risk.

19
Chapter 2 A DECALOGUE FOR ROCK-
AVALANCHE HAZARD MAPPING
Oliver Korup
RA.1 Rock-avalanche hazard: Outline of the problem
The process of rock avalanching is the extremely rapid (>30 m/s), flow-like movement of large volumes (>106 m3) of rock particles, which are being increasingly fragmented during the runout process (e.g. McSaveney, 2002). Rock avalanches that initiate from volcanic edifices are also termed debris avalanches.
Rock-avalanche motion typically takes places within less than one to several minutes, and the displaced masses attain a total runout of 1 to 20 km (Abele, 1974). There is very little observational evidence of this phenomenon. Judging from rock-avalanche deposits that have run up obstacles or opposite valley flanks, the maximum travel velocities of rock avalanches are estimated to range between 20 and 130 m/s (Figure2.1). These extreme velocities together with the long runout make rock avalanches some of the most highly mobile and destructive geological processes on the Earth’s surface.
At European scale, rock avalanches are known to have occurred chiefly in high-relief terrain, i.e. the European Alps (e.g. Abele, 1974; Prager et al., 2008), the Pyrenees, the Fennoscandian and Caledonian mountain belts (e.g. Sandersen et al., 1996; Blikra et al., 2005), parts of Mediterranean uplands (e.g. Gallousi and Koukouvelas, 2007), and Iceland (e.g. Whalley, 1983). Catastrophic debris avalanches have occurred mainly in centers of volcanic activity, i.e. in the Mediterranean and Iceland.

20
10
100
1000
10000
0.1 1 10 100 1000 10000 100000
Volume (106 m3)
Swas
h he
ight
(m)
vmax = (2ghsw)0.5
vmax = maximum velocity g = gravitational acceleration hsw = swash height
vmax = 20 m s-1
vmax = 130 m s-1
Figure2.1. Relationship between swash (= run-up) height of rock-avalanche deposits and the total deposit volume for n = 65 events documented in the literature (based on the inventory compiled by Korup et al.,
2007). Using the simple principle of energy conservation (which disregards additional frictional or fragmentation energies) allows determining the maximum velocity of the rock avalanche in motion. This
inferred maximum velocity tends to systematically increase with total volume mobilised.
Conventional friction physics cannot fully explain this high mobility, and a number of physical laboratory experiments have failed to replicate the excess runout achieved by rock avalanches in nature. The lack of accurately predicting the location, initial volume, and maximum travel distance for a given rock avalanche is one of the key problems in hazard assessment. Rock avalanches are relatively rare types of landslides, and many conventional methods in use for quantitative landslide hazard assessments have not been fully tested or verified for rock avalanches. In practice, meaningful appraisals of rock-avalanche hazard can be conducted either at
o Regional scale, where a sufficiently high number of samples can be used to express the annual probability of occurrence for a given region, or
o Local (= hillslope) scale, where detailed engineering geological and geotechnical site investigations provide sufficient data to formulate a number of scenarios, which can subsequently be used for quantitative hazard and risk assessments.
The obvious link between these scales is the knowledge on where rock avalanches are likely to occur. For smaller landslides, this is usually the focus of susceptibility studies. However, the fact that there are as yet very few studies that have attempted to systematically explore the susceptibility of rock slopes to rock avalanches has turned out to be one of the major limitations to comprehensive hazard mapping of these phenomena.
Because of these limitations, a standardised production of hazard maps for rock avalanches is currently not feasible, especially when compared to the sophisticated methods used for snow-avalanche hazard mapping.

21
RA.2 Common misconceptions
There are a number of popular beliefs and misconceptions that relate to rock avalanches:
Process: Rock avalanches are granular flow processes. Although they may develop from large rock slides or rock falls, the flowing motion of fragmenting particles prevails. Hence, even standard terms in some European languages (e.g. the German term “Bergsturz” = “mountain fall”) are somewhat misleading. Likewise, there is the common belief that the extreme mobility of rock avalanches is mainly due to high basal pore-water pressures in the moving mass. While this instance may surely help explain at least in parts the excess runout of some events, it needs to be stressed that rock avalanches can also be the result of dry granular flows. Giant catastrophic rock avalanches also occur on Mars and the Moon, where no water is available for invoking excessive runout (e.g. McEwen, 1989).
Timing and frequency: Rock avalanches are commonly characterised as low-frequency/high-magnitude events that occur predominantly in areas of high relief. In alpine areas, they were traditionally viewed as a form of very rare, though catastrophic hillslope response to debuttressing of alpine valley walls following deglaciation. There is, however, ample evidence that rock avalanches continue to occur throughout the Holocene, while having incurred a high number of fatalities and damage in many mountain belts in historic times (Raetzo et al., 2002; Segalini and Giani, 2004; Blikra et al., 2005; Prager et al., 2008). Especially in tectonically active mountain belts such as the Himalayas, the Tien Shan or the Pamir, there is ongoing occurrence of rock avalanches with volumes up to 109 m3. Likewise, active volcanic arcs have in historic times been the stage of several catastrophic debris avalanches.
Countermeasures: The large volumes and extremely high impact forces of rock avalanches render many structural countermeasures inefficient, if not useless. Technical measures may be of use where strategically placed to reduce or counteract rock-slope deformation that has the potential to deteriorate into a catastrophic rock avalanche. The most cost-efficient countermeasures against rock avalanches will most likely be those of a passive nature, involving e.g. hazard zonation, evacuation and emergency contingency plans. Early warning is seldom feasible and partly depends on the detection and successful monitoring of suspected failure sites (Crosta and Agliardi, 2002). Sophisticated numerical (process) modelling and real-time monitoring (Willenberg et al., 2002; Tarchi et al., 2003), though readily available, is limited to selected case studies of rock sliding (Sartori et al., 2003; Segalini and Giani, 2004), and rarely provides means of application to larger regions. Alerting systems may be used to announce rapid evacuation of threatened communities or closure of infrastructure. Such systems will need to account for the short event duration and extremely high travel velocities of rock avalanches (or their displacement waves when dropping into a lake or fjord). However, alerting systems will be essential for use with long-term effects of rock avalanches, such as natural dammed lakes that are prone to catastrophic outburst.
RA.3 Causes and triggers
Causes of rock-slope instability that lead to rock avalanching are gravitational stress, lowering of rock-mass strength through earthquake shaking, hanging-wall shattering, and incision-driven loss of lateral support. The latter may include fluvial or artificial undercutting, but also possibly melting of permafrost

22
ice in jointed alpine rock slopes, although so far there have been no demonstrated physical links between the thermal and large-scale geotechnical regime in alpine rock slopes. Causes of volcanic debris avalanches include gradual slope deformation and oversteepening by magma chamber growth and deflation.
Trigger mechanisms of rock avalanches include earthquakes, high-intensity rainstorms, and fluvial undercutting. Several historic rock avalanches occurred without any observed triggers, possibly from exceeded intrinsic stress thresholds, and catastrophic culmination of rock flow (e.g. McSaveney, 2002). Volcanic debris avalanches are commonly triggered during volcanic eruptions, catastrophic outbursts of lake calderas, or as part of a large-scale sectoral collapse.
The capability of predicting earthquake-triggered rock avalanches depends on that of predicting earthquakes in general. The same applies to those triggered by fluvial undercutting or gradual loss of rock-mass strength beyond a critical stress threshold. Predictability increases where rock avalanches are preceded by slow moving deep-seated slope deformation, although such low-activity phases may extend from decades to millennia, before catastrophic “creep rupture” (Radbruch-Hall, 1978).
RA.4 Geomorphic evidence
Rock avalanches, like other geophysical granular currents, produce a characteristic array of landforms that are tell tale of catastrophic long-runout failure processes (for a detailed characterisation of the morphology and sedimentology of rock-avalanche deposits see e.g. Hewitt, 1999).
Most of the several dozen (pre-)historic rock avalanches hitherto documented in the European Alps have contributed to substantially re-shaping the morphology of valley floors (Figure2.2). Their extensive and considerably thick hummocky deposits contain a myriad of small-relief landforms, and have often persisted as significant obstacles to modern infrastructure and land use (Figure2.3).
Figure2.2. Exposure of rock-avalanche deposit composed of highly fragmented greywacke and argillite, Crow River, Southern Alps of New Zealand. Scarp is ~100 m high and marks the maximum height of this
former and now breached natural dam. Scree slopes indicate continued reworking of highly angular rock-avalanche debris.

23
Figure2.3. Map of the 1.3 × 1010 m3 Flims rockslide/rock avalanche (grey shaded), which is the largest catastrophic rock-slope failure in the European Alps. The landslide occurred in gently dipping carbonate rocks of the Flimserstein (thick black line indicates headscarp) ~9,000 yr before present and blocked the
Alpenrhein, forming a natural dam >400 m high, which impounded a large, ephmeral lake (after von Poschinger, 2005). Dotted areas delineate a number of smaller rock-slope failures that mostly post-date
the Flims event.
RA.5 Existing databases
A considerable number of case studies and inventories of rock avalanches throughout the world has helped constrain empirically their gross dimensions (e.g. Abele, 1974; Whitehouse, 1983; Prager et al., 2008; for a recent overview see Hewitt et al., 2008). However, in many cases their causes and triggers remain unknown in the absence of detailed field investigations. This also applies to the post-failure evolution of the rock-avalanche deposits including potential reactivations at the same site.
The database tool of choice is GIS, which can be used as a flexible and extendable database management for large slope failures (Giardino et al., 2004). Existing rock-avalanche inventories list a number of volumes and dates, which may be readily used for such an analysis. Absolute dating (i.e. mainly radiometric) methods are available to constrain the age of a number of deposits (e.g. Whitehouse, 1983; Prager et al., 2008) with unknown ages to fill in gaps in the magnitude-frequency distribution.
RA.6 Quantifying rock-avalanche hazard
The terminology on landslides in general, and catastrophic rock-slope failures in particular, is used i i l d i d f d h h d k b l i ll

24
inconsistently, and important and often-used terms such as hazard, risk, or susceptibility are occasionally defined in a variable and sometimes even contradictory manner (Aleotti and Chowdbury, 1999; Dai et al., 2002). A high number of landslide risk assessments address parts of the risk equation only, thus mainly providing measures of susceptibility or geomorphic hazard.
The term “hazard”, when applied to landslides in general, refers to the probability of physical impact within a specified region and a specified period of time (Cruden and Varnes, 1996). Landslide hazard is thus a statistical measure that expresses the (usually annual) likelihood of direct contact with the slope-failure process. This definition can be adapted as such for rock avalanches as a specific type of landslide, and requires sufficiently large and complete time series of rock avalanches of known volume. In other words, quantifying rock-avalanche hazard on an empirical basis requires data on their magnitude and frequency of former events.
Whitehouse and Griffiths (1983) presented a pioneering study in this regard by estimating quantitatively the annual probability of occurrence of catastrophic rock avalanches in a 10,000-km2 study area of the Central Southern Alps of New Zealand. Their estimates were based on a sample of n = 42 events dated to the Holocene. Out of these, 14 events with volumes >2 × 107 m3 were assumed to represent the complete population of rock avalanches in this time period. The extreme-value model used for estimating rock-avalanche hazard is based on a Poisson arrival process with a density function p
⎥⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛ −−
−−=α
α uVVuVVp )ln(expexp),,;( 00 , (1)
where V is rock-avalanche volume, V0 is an arbitrarily set threshold volume, u is a location parameter, and α is a scale parameter. Whitehouse and Griffiths (1983) have used this Log-Gumbel distribution to express the volume of a rock-avalanche event exceeding V0 as a function of its return period T,
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎟⎠⎞
⎜⎝⎛
−=−
−α
λλ
1ln0 T
TeVV u , (2)
where λ is the average rate at which events arrive (λ = 1/732 yr–1 in this particular case study), with V0 = 2 × 107 m3, u = 16.12, and α = 1.323. According to this model, a rock avalanche with a volume of 5 × 107 m3 would have an estimated return period of roughly 2,070 yr in the Central Southern Alps of New Zealand. In contrast, a rock avalanche with a return period of about 10,000 yr would have an expected volume of 3.2 × 108 m3 (Figure2.4).

25
Figure2.4. Rock-avalanche volume as a function of its return period (red curve) derived from a dataset of n = 14 Holocene events with volumes V >V0 = 2 × 107 m3 in a study area in the Central Southern Alps,
New Zealand (Whitehouse, 1983). Secondary y-axis indicates probability of occurrence (i.e. hazard) of an event with known return period within 1, 10, and 100 yr (colour-coded straight lines). The inferred
annual probability of rock-avalanche occurrence for this size range lies mainly between 10–3 and 10–4.
The hazard H of a rock avalanche, expressed here as the probability of occurrence of at least one event of return period T in z years, can thus be derived by
z
TH ⎟
⎠⎞
⎜⎝⎛ −−=
111 . (3)
However, judging from the frequency of historic rock avalanches in the same area, McSaveney (2002) surmised that this statistical model most likely yielded underestimates, and that catastrophic rock avalanches >106 m3 had a return period of about 20 to 30 yr. This instance highlights the limitations of this empirical based approach to quantifying the hazard of rock avalanches.
A comparison with documented rock avalanches in the European Alps highlights a number of difficulties one encounters when using this technique. The interarrival times of n = 31 dated rock avalanches >2 × 107 m3 that have occurred in the European Alps during the last 10,000 yr also follow an exponential distribution (λ = 1/338 yr–1, Eg. 2), hence the model of Whitehouse and Griffiths (1983) seems to be applicable. This average frequency of large postglacial rock avalanches in the European Alps appears to be nearly twice that in the Southern Alps of New Zealand. However, normalised by the extent of the study area, it is about 1/50 of the average frequency in the Southern Alps of New Zealand given that any significant spatial clustering is disregarded.
Moreover, there are at least 70 documented rock avalanches >2 × 107 m3 documented for the European Alps, out of which nearly half remain undated. Hence, the sample of n = 31 rock avalanches cannot be taken as complete. Assuming, for example, that a total of 100 rock avalanches with a volume greater than V0 had occurred during the last 10,000 yr, would result in average return periods T ~100 yr and T ~17,900 (explain how this number was derived) yr for a rock avalanche of 2 × 107 m3, and 1.3 × 1010 m3 (i.e. the size of the Flims rock slide/rock avalanche), respectively. By virtue of this method, the value of T for the largest event of roughly 18,000 yr remains relatively robust with regard to the number of unrecorded

26
smaller events.
Malamud et al. (2004) investigated the relationship between the frequency and magnitude of three historical landslide inventories that recorded in substantial completeness mainly small events triggered by earthquakes, rainstorms, and snowmelt. They found that a three-parameter inverse gamma distribution provided the best fit to the probability density functions p derived for all three inventories, irrespective of geographic location, underlying geology, topography, climate, or triggering mechanisms:
⎥⎦
⎤⎢⎣
⎡−
−⎥⎦
⎤⎢⎣
⎡−
−Γ
=+
sAa
sAa
asaALp
LL
exp)(
1),,;(1ρ
ρρ , (4)
where Γ(ρ) is the gamma function, AL is landslide planform area, ρ = 1.40 is the scaling exponent of the power-law tail in cumulative form, and a and s are scaling parameters with values a = 1.28 × 10–3 km2, and s = –1.32 × 10–4 km2 (Figure2.5).
Figure2.5. Dependence of landslide probability densities p on landslide planform area AL, for three substantially complete landslide inventories: (1) n = 11 111 landslides triggered by the 17 January 1994 Northridge earthquake, California, USA (open squares); (2) n = 4233 landslides triggered by a snowmelt event in Umbria, Italy, January 1997 (open circles); (3) n = 9594 landslides triggered by heavy rainfall
from Hurricane Mitch, Guatemala, October/November 1998 (closed diamonds; for data sources see Malamud et al., 2004). Note that density frequency of larger landslides, i.e. with AL >10–2 km2 can be
approximated with an inverse power law (straight line in log-log space). Inset shows the same distribution on linear axes.
Use of this distribution implies that the larger landslides in a given inventory follow an inverse power-law relationship between frequency and magnitude, in this case, planform area AL:
ALAL AaAp α−=)( , (5)
where aA is a dimensional coefficient, and αA is the landslide-area scaling exponent. A similar

27
relationship can be demonstrated for rock-avalanche volume VL.
While this and other similar distributions have been fitted to a number of landslide inventories throughout the world, there is generally little certainty as to whether the proposed power-law tail is indeed warranted for large catastrophic landslides such as rock avalanches. Moreover, very few studies have focused on large rock-slope failures in the European Alps (e.g. Dussauge et al., 2003). Figure2.6 shows a first compilation of magnitude-frequency data on large rock-slope failures (including rock avalanches) in the European Alps in comparison with worldwide data.
Figure2.6. Frequency density as a function of planform area of n = 277 rock avalanches, and n = 82 volcanic debris avalanches collected from worldwide data (based on data compiled by Korup et al., 2007). Also shown are a subset of n = 71 large (and mainly catastrophic) rockslides in the European
Alps, and n = 89 rockslides in the Alpenrhein catchment and its surroundings, Central European Alps. Data points with orange outlines (rollovers) were not included in this analysis because of likely
undersampling. Straight colour-coded lines indicate best fit of inverse power-law models valid over two orders of magnitude. Note that the scaling exponents αA for all rock-avalanche data overlap within one standard deviation (± 1 σ), irrespective of the different timescales, tectonic and climatic regimes, and
topographic characteristics encompassed by these datasets; mL indicates the landslide magnitude scale (see Malamud et al., 2004 for discussion), and highlights potential deviations of the data trends from the
inverse gamma model applied to substantially complete landslide inventories (grey subparallel lines indicate power-law tails of this distribution for various values of mL).
Another major drawback for estimating rock-avalanche hazard with such scaling relationships is the lack of absolute age controls on many rock-avalanche deposits. Thus, although size-scaling relationships may be established mainly on the basis of rock-avalanche deposit area or volume, there is little additional information about the frequency with which these events occur in time. Altogether, very few rock-avalanche inventories allow putting more tight temporal constraints on the observed relationship between frequency density and volume (Figure2.7).

28
Figure2.7. Average annual frequency density as a function of landslide volume of n = 70 large catastrophic landslides (including rock avalanches) that occurred in China during the 20th century (Wen et al., 2004), n = 44 Holocene rock avalanches in the Southern Alps of New Zealand (Whitehouse, 1983),
and n = 68 Holocene landslides in the European Alps (Abele, 1974; Korup et al., 2007, Prager et al., 2008). Geometric mean (GM) regression lines indicate inverse power-law relationship (with exponent
value –αV) over more than three orders of magnitude (in the case of the European Alps), and may be used to quantify to first order rock-avalanche hazard in these study regions.
The magnitude-frequency relationship thus derived from a sample of n = 68 documented catastrophic landslides with volumes between 106 and 1010 m3 (mainly rock avalanches documented in Abele, 1974; Korup et al., 2007; Prager et al., 2008; and other references) that had occurred in the European Alps during the last 10,000 yr (Figure2.7) indicates that, for example, events with a volume of 107 m3 were on average ~21 times more abundant than events with a volume 108 m3. In other words, smaller events have occurred more frequent than larger ones during the Holocene, where the consistent factor of ~21 for each increase/decrease in order of magnitude of landslide volume is set by the scaling exponent αV. Using a larger sample of n = 110 late glacial and Holocene landslides that have occurred in the Alps during the last 16,000 yr produces the same scaling exponent αV = 1.32 ± 0.08 (± 1 σ). In this case, the number of samples does not seem to significantly influence the observed scaling relationship (Figure2.7).
RA.7 Uncertainties in regional-scale hazard assessment
Scaling relationships between rock-avalanche frequency density and magnitude (deposit area or volume) are a straightforward means to estimate the probability of occurrence of such events within a specified study area. If age constraints are corroborated by absolute ages, then the average frequency of occurrence of a rock avalanche of a given size or larger can be directly estimated for this specific region from the density frequency curve. This approach is a first-order approximation at the regional scale (Figure2.7) and carries with it a number of uncertainties and pitfalls that may introduce substantial error ranges.
Regional detection and mapping of rock avalanches usually involves the interpretation of remote sensing data. This approach, however, is limited by

29
• Undersampling: Dense vegetation, lakes or other water bodies, as well as land-use cover may mask even extensive deposits from rock avalanches, thus providing minimum values in both number of rock avalanches and extent of total affected areas.
• Erosional censoring: With increasing age of rock-avalanche deposits, there is an increasing likelihood that post-emplacement erosional processes by rivers, debris flows, or rock fall may have diminished the initial dimensions of the deposit. This leads to potential underestimates of the rock-avalanche deposit, especially where the size of the detachment area is unknown.
• Depositional censoring: Especially older rock-avalanche debris may have also been buried by subsequent rock-slope failures at the same site, including reactivations of comparable or even larger size. There is growing evidence that many of the large rock-avalanche deposits in the European Alps indicate the superposition of several large events, which detached from more or less the same source area (Prager et al., 2008).
It follows that a key uncertainty of invoking scaling relationships for quantifying the hazard of rock avalanches at regional scale is the effect of sample size, which may or may not alter significantly the value of the power-law scaling exponent (Figure2.7). The effect of undersampling is usually being dealt with by choosing a large enough lower size threshold (Whitehouse and Griffiths, 1983). However, fewer sample sizes tend to produce less robust regression statistics, and thus it remains difficult to judge whether scaling exponents derived from different inventories are significantly different or not. In other words, it remains unclear for large landslides in general and rock avalanches in particular, whether it is advisable to use a “universal” scaling exponent (Malamud et al., 2004) or not.
Another uncertainty in quantifying hazard is tied to the synchronous occurrence of rock avalanches during regional landsliding episodes, such as large earthquakes. The accuracy and temporal resolution of absolute dating methods may mask such coeval events, suggesting temporal clustering rather than synchroneity.
RA.8 Determining rock-avalanche runout
One essential step towards producing a hazard map of rock avalanches involves the prediction of runout, which comprises the maximum travel distance as well as the estimated extent of erosion, transport, and deposition zones of the process. Documented travel distances of rock avalanches may attain up to 20 km (e.g. Kandersteg, Swiss Alps), whereas that of debris avalanches, which commonly transform into debris flows, is more difficult to constrain. There presently are a number of physical based models that simulate rock-avalanche dynamics and mechanics, with a focus on attempting to explain the extraordinary runout and required low friction coefficients.
Most of these models explain the extreme mobility of the moving mass by invoking, among other theories, groundwater-saturated valley fills, increased porewater pressures in basal shear bands, acoustic fluidisation, or dynamic fragmentation (e.g. Davies and McSaveney, 2002; Denlinger and Iverson, 2004; Iverson et al., 2004; Pirulli, 2004). Augmented or even calibrated with empirical data, many of these models provide more or less reliable predictions of runout for a given failure volume (Figure2.8).

30
Figure2.8. Oblique view of shaded 25-m digital elevation model containing the distribution of modelled maximum flow height of the 1999 Mount Adams rock avalanche (1.5 × 107 m3), Poerua River, Southern Alps of New Zealand. Grey elevation contours are spaced at 100-m intervals. This rock-avalanche event
was modelled with software that—with some minor modifications—is also capable of modelling snow avalanches and debris flows. Numerical model simulations of this kind are not only sensitive to the choice of model parameters, but also the accuracy of the initial conditions, specified here by shape and average
depth of the detaching rock mass.
The key problem, however, is not the calibration of parameters for reconstructing a given event, but the use of these calibrated parameter values to successfully model other events. It is quite common that one set of calibrated parameters yields over- or underestimates of the deposit morphology, when applied to rock avalanches that initiated even under very similar conditions. Hence, dynamic rock-avalanche modelling should be preferably used for hillslope-scale hazard mapping, and only if there is sufficient certainty about the calibrated parameter set.
RA.9 Pending issues
The key difference to hazard and risk assessments of snow avalanches and debris flows, which are often carried out for known prone channels or slopes, is that very often, rock slopes prone to catastrophic rock avalanching are difficult to identify without detailed surface and subsurface investigations at the hillslope scale. Despite the availability of a number of physical based numerical runout models that produce somewhat satisfying simulations of rock-avalanche dynamics there is little work that documents the sensitivity of such models to changes in initial conditions. In other words, little is known about how model results may systematically be affected by the choice of
o Initial location of the failure mass (e.g. ridge crest)
o Planform geometry (i.e. extent of headscarp and lateral release scarps)
o Threedimensional geometry of unstable rock block
o Occurrence and orientation of rock-mass discontinuities; and
o Initial loading conditions (e.g. cleftwater pressures, creep velocities, additional horizontal earthquake acceleration).

31
Although there are a high number of known unstable rock slopes in the European Alps, no generally accepted set of criteria exists to objectively quantify their potential for catastrophically releasing large rock avalanches. In a regional-scale study on potential topographic controls on the occurrence of large catastrophic rock avalanches, Korup et al. (2007) demonstrated that most rock avalanches initated in regions where the mean local relief (measured as the maximum elevation difference in a moving window of 5-km radius) was above the average of that of the mountain belt studied (Figure2.9).
Figure2.9. Relationship between local relief H and volumes of catastrophic landslides (>108 m3) in selected mountainous terrain. Black curves are cumulative percentage distributions of H >300 m
normalized by area. Grey boxes delimit ±1 σ of H about the orogen-scale mean (horizontal line). Hatched histograms show fraction of total landslide volume. Error bars delineate ±1 σ of H within 15-km radius
around each landslide data point. White circles and black diamonds in Andes data are landslides in glaciated and non-glaciated terrain, respectively; grey triangles are volcanic landslides. Additional
hatched area for New Zealand data applies to South Island only; white circles and black diamonds are North and South Island landslides, respectively (after Korup et al., 2007).
Site-specific monitoring is costly and subject to considerable variation on the slope-scale (Wilson et al., 2003). Therefore, it is suitable—if not compulsory—to approach the task of hazard zonation at the regional rather than the local scale of individual slopes. Hence, a regional magnitude-frequency approach is much more adequate for quantifying to first order the annual probability of rock avalanching within a defined study area.
Another pending issue to resolve concerns the exact delimitation, and thus successful simulation, of individual failure-process domains. Most studies regard large rock-slope failures as discrete short-lived events, but rarely address the potential for rock avalanches to develop as a catastrophic culmination from

32
chronic rock-slope deformation (“Sackung”, “Talzuschub”; Figure2.10). This also applies to the gradual reduction to rock-mass strength by physical and chemical weathering, crack growth, stress redistribution, and/or melting of high-mountain permafrost, which all favour catastrophic rock-slope failure (e.g. Bottino et al., 2002; McSaveney, 2002). Any such precursory processes are of high relevance to hazard zonation, as they allow timely detection, monitoring, and—in some cases—early warning by use of e.g. inverse displacement rate relationships.
Figure2.10. Field photograph of active 6- to 10-m wide tension headscarp of Åkneset rockslide (estimated active area is 650,000 m2), Storfjorden, Norway. This rock-slope failure has historically been dominated
by creep motion (Blikra et al., 2005), and there are elevated concerns that this type of movement may deteriorate to a rapid rock slide/rock avalanche.
Successful dynamic modelling of rock avalanching itself is dependent on the adequate representation of processes that help reduce apparent basal friction. As mentioned above, however, it is at present unclear whether unappropriate choice of initial conditions may not play a similar role in affecting model results. This lack of unequivocally identifying areas prone to future rock avalanching currently precludes any regional-scale hazard mapping as is being done for snow avalanches or debris flows. Future research will therefore need to focus more on constraining topographic and geological controls on rock-avalanche initiation.
Another very crucial point of neglect in many landslide hazard studies are any adverse off-site or long-term effects, such as blockage of rivers systems and potential outburst floods (Korup, 2002; Schneider et al., 2004), rockslide tsunami (Sandersen et al., 1996), massive aggradation in channels and on floodplains (Korup et al., 2004), river channel instability (Korup, 2004), or impacts on artificial dams associated with rockslides (Poisel et al., 2003). Also, rock-avalanche deposits may act as long-term debris reservoirs for recurring shallow failures such as rock falls or debris flows, which eventually will require additional hazard assessments.
RA.10 Conclusions
Hazard mapping of rock avalanches will still need to come a long way. Regional-scale analyses of detailed inventories of dated events allow constraining to first order the annual probability of occurrence, thus providing first essential inputs to quantitative hazard assessments. At the hillslope scale, engineering

33
geological and geotechnical data allow the formulation of hazard scenarios, which may be further quantified by using calibrated dynamic runout model.
The link between these regional- and hillslope-scale appraisals lies in systematically quantifying the susceptibility of rock slopes to releasing rock avalanches. Only if this susceptibility can be cast in a form that allows adequate map-scale generalisation, will it be possible to produce hazard maps that satisfy the same requirements as those for snow avalanches and debris flows.
Judging from a limited sample of rock-avalanche occurrence in the European Alps during the last 10,000 years, large events with volumes of 2 × 107 m3 have a maximum return period T ~ 300 yr anywhere in the Alps, although judging from the number of undocumented or undated events it is much more likely that T ≤ 100 yr. This conservative estimate underlines the need to develop adequate and harmonized hazard assessment and mapping procedures for these potentially destructive events at European level.

34
Chapter 3 A DECALOGUE FOR SNOW AVALANCHE
HAZARD MAPPING
Massimiliano Barbolini
SA.1 Avalanche hazard: outline of the problem
Generally speaking the “avalanche hazard” is connected to a potentilly damaging avalanche event, that is an avalanche with the potential to create harm to people, property, or the environment. Evaluation of avalanche hazard for a given area requires a combinated estimate of the avalanche frequency and intensity. According to some European legislation (e.g. Norway) the fact that an avalanche will reach a given location is considered sufficient to assume this location endangered by avalanche; in that case hazard mapping is simply associated to runout distance of avalanches and the distinctive parameters to assess different hazard levels is the avalanche return period (that is the frequency at which an avalanche could reach a given location). Conversely, according to legislation of Alpine countries (Switzerland, Austria, Italy and France) intensity of avalanches is also associated to impact pressure, that became an important parameter for mapping purposes togheter with avalanche runouts and return periods.
Potentially destructive effects of avalaches are strongly related to the avalanche type and size. A preliminary analysis aimed to investigate the type of prevailing avalanche (i.e. dense, powder, mixed) in the site under analysis is essential. The expected maximum size of the avalanche determines its importance as well. In general, sluffs and small avalanches (see § SA.4), typically of loose-snow-type (point release), are not relevant for hazard mapping and land use planning, where the main focus is on medium to large “slab-type” avalanches (see Figure 1). Nevertheless, small avalanches could be a serious theath in backcountry winter activities and, in some cases, they can be dangerous for winter corridors as well (roads, raylways, ecc.).

35
Figure 3.1 – An example of large avalanche affecting a densely inhabited valley bottom, “Lavancher” avalanche, Morgex, Aosta Valley, Italy. On the left picture the deposit of the 1999 event, on the right image an indication of the maximum avalanche outline and of the main exposed elements (pictures by courtesy of
Avalanche Office of Aosta Valley Region)
SA.2 Avalanche release areas
Definition of avalanche potential release ares is a key step of any process aimed at an assessment of avalanche hazard; it allows a proper definition of the design events and could be an important outcome in view of planning risk reduction by retaining work.
Susceptible to avalanche release are those mountain slope characterised by a proper combination of topographical (inclination) morphological (convexity) and vegetative (forest cover) features. Factors such as exposure to the wind, exposure to the sun and surface roughness should be considered as secondary factors that mainly affect avalanche activity and avalanche forecasting, but are less important with respect to potential release areas definition for “extreme” avalances.
The primary terrain requirements for avalanche initiation is a slope incline that will alow an avalanche to start and accelerate. The average inclination of starting zones, for medium to large slab-avalanche, ranges from 25° to 45° (see Table 1). On rare occasions, avalanches can start on gentle slopes of less than 25° (e.g. slushflow involving wet snow with high water content), but generally the shear stress induced by gravity is not large enough to cause failure. For inclinations in excess of 45° to 50°, many slides (sluffs) occur during snowfalls; thus amounts of snow deposited on these extremely steep slopes are limited.
Table 3.1 - Guidelines for starting zone incline

36
Inclination Typical avalanche activity 10° - 25° Infrequent wet snow avalanche and slush flows 25° - 35° Infrequent (often large !) slab avalanches; wet, loose snow
avalanche 35° - 45° Slab avalanches of all sizes 45° - 55° Frequent small slab avalanches 30° - 60° Dry loose snow avalanches 60° - 90° Avalanches are rare; snow sluffs frequently in small amounts
Ground surface roughness is a key factor in the anchorage of the snow cover to the ground as well. Dense forests, broken terrain, starting zones cut by several ridges, ground covered by large boulders generally limit the amount of snow that can be involved in the start of an avalanche. Conversely, widely-spaced forests, large and open slopes with smooth ground may favour avalanche release. In particular, a forest on steep slope inhibits large avalanche formation because it influences the amount of deposited snow and the stability of the snow cover itself. In Table 2 indicative featuers of a forest able to prevent avalanche release are suggested.
Table 3.2 - Guidelines for protective forest Slope inclination Typical density for a protective forest, expressed as: number of trees per hectar < 40° ≥ 500 > 40° ≥ 1000 % of coverage (by leaves) Any ≥ 50%
SA.3 Avalanche fracture depths
Most of the time, snowfall is the cause of avalanches. The hazard increases significantly with the increase in the depth of new snow. For instance, an accumulation of 30 cm/day may be sufficient to cause widespread avalanching. In European mountain ranges, heavy snowfalls with a total precipitation exceeding 1m during the previous three days may produce large avalanches, with possible extension down to the valley bottom.
In mapping applications the definition of release scenarios usually considers an uncoupled estimate of release area (see § SA.2) and release depth. In principle, on a given avalanche path expected release depth for assigned return periods could be estimated by statistical analysis on a set of known fracture depths from recorded events. However, in practice the amount of such data is usually very scarce and does not allow a reasonably accurate estimate of fracture depth for the design event (return periods of 100 years or more).
The Swiss Giudelines (Salm et al., 1990; Burkard and Salm, 1992) suggest an empirical framework to estimate the release depth of design avalanche event. The avalanches relevant for mapping purposes are considered of slab type, and associated to intense snowfall (see Figure 3.2); it is also supposed that the old snow cover does not break loose. Therefore, it is assumed as relevant parameters for the release depth evaluation the three-days snow precipitation, in the following indicated as P72. The snow cover stability is based on Mohr-Coulomb failure criterion. From the above hypothesis the following relation expressing the effective release depth ( )zT,Hr as a function of the three-days snow precipitation ( )zT,P72 , the snowdrift

37
overloads SDP and the average slope of release zone θ is derived (Salm et al., 1990; Burkard and Salm,
1992):
( ) ( )[ ]θθ 0.202cossin
0.291PzT,P72zT,H SDr −⋅+= [1]
where T indicates the considered return period, and z the average altitude of the release zone.
Figure 3.2 – An example of slab release, with a fracture depth of about 2 meters (by courtesy of Apatit Avalanche Centre, Kirowsk, Russia)
The values of P72 as a function of T are inferred by statistical analysis. Data sample of maximum annual values of P72 are fitted to theoretical distribution functions, which in turn are used to extrapolate from the recorded events to the design event (Cunnane, 1989). Typically Gumbel extremal distribution (EV1) is considered for this purpose in literature (Gumbel, 1958). Simple rules, as that proposed in the Swiss Guidelines (Salm et al., 1990), are then used to express the rate of growth of P72 with the altitude. The estimate of snowdrift overloads, PSD, is instead usually empirically-based and not related to return periods. For instance, in the Swiss Guidelines values in the range between 30 to 50cm are proposed for this variable in the case of situations appropriate for snowdrift processes to be relevant.
SA.4 Avalanche sizes
Beside morphological classification (UNESCO, 1981) snow avalanche are classified according to size as well. The Canadian system, which is widely used also in Europe, classifies avalanche sizes (1 to 5) according to its destructive potential, using an approach similar to the Mercalli scale used for ranking the shaking intensity of earthquakes. However, different sizing systems are employed elsewere in the world. The reader could refer to Appendix D of McClung and Schaerer (1993) for a detailed discussion on the various avalanche size classification system proposed so far.
In the following Table 3 is presented the sizing system recently suggested for the Alps by the Working group of the European Avalanche Forecasting Services (http://www.slf.ch/laworg/map.html).
Table 3.3 – Size of the avalanche, classified by runout length, volume and destructive potential.
Size/Term Runout classification Damage potential classification Quantitative classification

38
Size 1 Sluff
Small snow slide that usually cannot bury a person but push over a cliff
Relatively harmeless to people Length < 50 m,
Volume < 100 m3
Size 2 Small avalanche Stops within the slope Could bury, injure or kill a
person
Length<100 m,
Volume<1000 m3
Size 3 Medium avalanche
Runs to the bottom of the slope
Could bury and destroy a car, damage a truck, destroy a small building or break a few trees
Length<1000 m,
Volume<10000 m3
Size 4 Large avalanche
Runs over flat areas (significantly less than 30°) of at least 50 m in length, may reach the valley bottom
Could bury and destroy trucks or trains, large buildings and forestead areas
Length>1000 m,
Volume>10000 m3
SA.5 Avalanche indicators
There are several ways to estimate both the size and frequency of large avalanches within a given avalanche path, and for estimating runout distances. Oral and written history and direct observations of avalanches are the most reliable method for determining the runout of avalanches in a path. Oral information about the extent of past avalanches can come from local avalanche experts or others who have lived in the area for years and may have observed events. Written history may come from newspapers, historical records, books, diaries or photographs (see Figure 3.3).
Figure 3.3 – Photo of an avalanche event with an indication of the avalanche maximum outline, “Trabuchello avalanche” (1986), Brembana Valley, Central Italian Alps (Photo: M. Barbolini)
Vegetation within and adjacent to avalanche paths can provide clues about the maximum extent of extreme avalanches, and the return period of smaller events within the path (Martinelli, 1974). Avalanche motion can damage vegetation such as trees and bushes, and leave evidence of impacts for decades. Table 4 shows

39
some vegetation indicators as a function of avalanche frequency.
Table 3.4 – Vegetation as an avalanche-frequency indicator (after Mears, 1992)
When trees are removed from an avalanche path, gradual succession of trees on the path will occur. Thus, there may be a younger age class of trees within the central part of the avalanche path and several different age classes of trees on the margins of the path. The boundaries between these age classes are known as trimlines (Figure 3.4).
Figure 3.4 – Example of trimline between a mature forest and regenerating conifers
Analysis of aerial photographs and topographic maps can aid in identifying the extent of avalanche activity. Such analyses can be used to define the starting zones, tracks and runout zones, and estimate the extent of damage to vegetation from avalanches. Where several time series of aerial photographs are available, inferences about the return periods of avalanches can sometimes be made.
Weather and snow records can be used to estimate how much snow may accumulate in an avalanche area, and provide clues about the largest avalanches that may be expected in a path. Variables such as the maximum 3-day storm snow accumulation (see § SA.3) can be used in combination with avalanche dynamics models to estimate extreme runout distances (e.g.Gubler, 1994).
Surficial materials can sometimes be used to estimate extreme runout and frequency of avalanches in a path. Materials such as vegetation, rock and soil can be transported by large avalanches and deposited in the runout zone. The location of this material can provide clues as to the location of the extreme runout for larger avalanche events. Organic material, such as peat, in the runout zone can sometimes be carbon-dated to provide estimates of return periods for large avalanches.

40
SA.6 Avalanche dynamical behaviour and runout distance
An understanding of avalanche motion and dynamics is important to determine the potential avalanche velocities within a path and to relate these velocities to potential impacts to buildings and other structures or resources in the path (see § SA.7). Being able to estimate velocities in the runout zone is also important for zoning purposes since most of current avalanche zoning methods incorporate a velocity dependent criterion, usually in the form of impact pressure.
Describing the dynamics of avalanche motion is a complicated process that involves aspects of fluid, particle and soil mechanics. The mathematical problem of describing avalanche motion over complicated terrain is far from solved, and many different avalanche dynamics models are used by experts around the world. Some of these models have a theoretical basis, involve solving differential equations for mass, energy or momentum, and treat avalanches as granular material, a fluid, or a combination of the two. Others are based on a combination of theoretical mathematical models and empirical input parameters. Presently, all of these models require a degree of expert judgement to determine the appropriate input parameters for realistic modelling of velocity and runout. A summary of the currently available models for avalanche computation can be found in Harbitz (1998) and Harbitz et al. (1998).
When compared to wet snow avalanches (those containing large amounts of liquid water between snow particles, thus being characterised by high density and typically flowing as “ground” avalanche) dry snow avalanches (either dense or powder) typically attain the highest velocities, often produce the largest impact pressures and travel farthest in the runout zone. Consequently, dry snow slab avalanches are typically used as the design case avalanche for engineering purposes.
Dry snow avalanches consist of a mix of snow particles and air (called a dense core) at the bottom of an avalanche. This is sometimes accompanied by a powder component, or powder avalanche, which usually travels in front of and above the dense core and, sometimes, by an associated air blast which travels in front of the dense core or powder component. These two components are typically associated with large, dry flowing avalanches that attain sufficiently high speeds during transport over long distances.
With dry slab avalanches, after release of snow in the starting zone, the slab breaks into blocks or particles. As the avalanche moves farther downslope in the path, these particles become smaller due to particle-to-particle collisions and interaction with the ground or snow surface on which the avalanche moves. Eventually, this mass will evolve into a relatively high-density mixture of snow particles and air, and the motion can be described as sliding, flowing, airborne powder, or mixed. As the flow reaches a velocity greater than approximately 10 m·s-1, the smaller particles in this mixture become suspended by the turbulence of the entrained air and forms a low-density powder cloud on the exterior of the dense material, or core. As this mass flows down slope, new snow is entrained (added to the avalanche mass) near the front of the avalanche while mass sometimes drops out of the back of the avalanche. When an avalanche reaches a sufficiently low angle slope, deceleration and deposition increase, and the avalanche comes to a rest. Depending on the size of the avalanche and the terrain, this may occur in the starting zone, track or runout zone but, for the extreme events, will be in the runout zone. Traditional studies of larger avalanches define the location where the slope angle first decreases to 10° as the start of the runout zone, and define the runout distance as the horizontal distance measured from this point to the extreme runout position (McClung and Schaerer, 1993). However, many avalanches do not reach a 10° point before coming to a stop, leaving this definition open to discussion.

41
Estimates of the maximum velocity that may be attained by dry snow avalanches on paths with variable vertical fall heights are shown on Table 5. These data are based on limited velocity measurement data, destructive effects of avalanches and avalanche dynamics calculations. Beside the scale of avalanche path (say the vertical drop), also the size of avalanche influence its maximum velocity.
Table 3.5 – Typical dry snow avalanche maximum velocity, after Mears (1992)
Voellmy’s (1955) pioneering work on avalanche dynamics included equations of avalanche motion that are still the basis for many modern dynamics models. Nevetheless they can still be profitably used for first approximation estimate of maximum velocity and runout distance of snow avalanches. The Voellmy model describes the movement of the dense flow component of an avalanche as a turbulent fluid, and assumes that snow deforms freely under shear. This model is based on a Coulomb dry friction term and a dynamic term proportional to the square of the velocity. In its simplest form, the fundamental equations from the Voellmy model for the maximum velocity (V) and the runout distance (s) are:
( )ψμψξ cossin2 −⋅= hV [2]
( ) hgvgVs
ξψψμ 2
2
sincos2 +−= [3]
where ξ represents turbulence in the flow and has units of acceleration (m·s-2) and μ represents basal friction and is dimensionless. Both of these coefficients are thought to depend on the shape of the track and the volume of the avalanche, and are assigned values based primarily on Swiss experience and fitting runout distances to observed avalanches (Salm et al., 1990). The variable h represents the height of the dense avalanche flow, ψ is the slope angle and g is the gravitational constant. Avalanche velocities are calculated segment-by-segment along the path profile, and the avalanche stopping position is calculated in the last segment where the mass has insufficient velocity to surpass the end of the segment.
SA.7 Avalanche intensity
Buildings and other structures in mountainous terrain could be hit by avalanches and it is routine for engineers to consider potential impact forces of avalanches in design; nevertheless, according to current Alpine regulations, avalanche impact pressure is commonly used as measure of avalanche intensity for mapping purposes. Impact forces of avalanches might range from relatively harmless blasts from powder clouds to the high destructive forces of a full-scale dry flowing avalanche capable of destroying reinforced concrete structures (see Figure 3.5)

42
Figure 3.5– A building destroyed by the Galtuer (A) 1999 avalanche (photo: WLV Tyrol).
Impact forces due to moving snow are usually assumed to be proportional to the avalanche speed squared (V2) and the flow density of the moving material (ρ):
2
21 VCI d ⋅⋅= ρ [4]
Generally, dry flowing avalanches have the highest product of speed squared and flow density so their destructive potential is usually the highest. The value of Cd in Equation [4] depends mainly by the obstacle dimension and size. According to Swiss Giudelines for large obstacles (where large it means that they should be capable of deflecting a concsiderable amount of moving snow) Cd should be set to one for dense avalanche and to 0.5 for powder avalanche. For small ostacles (mast like structures) the value of Cd is function of the obstacles cross section, according to Table 6.
Table 3.6 – Cd for small obstacles as a function of obstacle cross-section shape (values applicable to dense and powder avalanche)
Table 7 gives typical impact pressures expected for avalanches in relation to their destructive effects, whereas in Table 8 most commonly used intensity classes for mapping purposes are presented.
Table 3.7 - Correlation between avalanche impact pressure and potential damages
Impact pressure (kPa) Potential damages
1 Break windows
5 Push in doors
30 Destroy wood-frame structures
100 Uproot mature spruce
1000 Move reinforced concrete structures
Table 3.8 - Typical intensity classes in hazard mapping

43
Intensity class Impact pressure
Weak I < 3 kPa
Moderate 3 kPa < I < 30 kPa
Strong I > 30 kPa
SA.8 Effects of countermeasures on avalanche hazard
From a normative point of view, laws and regulations regarding the adaptation of hazard zoning after avalanche protection measures have been constructed are different in different countries. For instance, in France no changes are made in the zoning, so that no relaxation of land use restrictions is made in spite of the improved safety provided by the protection measures. This underlines the policy that protection measures are only intended to improve the hazard situation in existing settlements and should not lead to increased population density in potentially hazardous areas, especially considering the inherent uncertainty about the effectiveness of avalanche protection measures. In most other countries (such as Italy, Austria and Switzerland) the hazard zoning is modified after protection measures have been completed in order to reflect the improved hazard situation, but the detailed manner in which the modifications are made differs between countries.
The question how to prove the effectiveness of protective measures is important for practical implementation. In the following points some general principles are listed that can help to make a first approach toward measure assessment.
- The effect of measures has to be quantified. This makes it necessary on one hand to have adequate process knowledge and on the other hand to have significant experience or scientifically proven effectiveness.
- Uncertainties should be as small as possible, in either case they have to be known and assessable. The decision on measures in risk management becomes complicated if their effect depends on strongly uncertain factors. This might result e.g. from the influence of human factors (decision on road closure, evacuations, ecc.)
- In the case of constructions the basic engineering output such as plans, design, calculations, ecc. must be available and carried out. Moreover constructions have to be monitored and professionally maintained to assure satisfying security requirements.
- The effect of a measure has to be persistently monitored. Therefore a measure must be replaceable or repairable quikly.

44
- The design parameters can be exceeded. It is very disadvantageous if by an occurring overload situation the effect of the measure is highly reduced and there is no spatial tolerance between the measure and the protected objects.
- Measures have to be judjed within their entire natural and artificial system. It is important to identify weak points that can cause a failure of the complete system but also to recognise redundancies that can attenuate a failure.
With specific respect to snow supporting structures (snow bridges and nets) Figure 3.6 indicate a scheme for the evaluation of effectiveness. The following question is crucial: how much can the hazard zone be reduced because of the structure ? The starting point for this analysis is always the initial hazard map without any safety measures and the result is an “adpted” hazard map. The difference between the two maps represent the effectiveness of the protection measure. The reduced runouts of design avalanches can be best assessed by performing avalanche dynamics calculation. The main difficulties is to determine from which controlled or uncontrolled zones big snow masses can still release. There exists no general approach applicable for all situations; every single situation has its own peculiarities. However, a general rule the following three scenarios have to be checked: (i) avalanche release outside of the controlled area (scenario 1 of Figure 3.6); (ii) avalanche release in the controlled area (scenario 2 of Figure 3.6); (iii) avalanche relase above the overfilled structures (scenario 3 of Figure 3.6).
Figure 3.6: Procedure for the quantification of the effectiveness of snow supporting structures (after Romang and Margreth, 2006)
Topography avalanche path:•Inclination, terrain profile, cross-section
•Vegetation, terrain roughness
Avalanche dynamics calculations:•runout distance, impact pressure in
relation to return period
Planning and implementation of supporting structures
Assessment of the efficiency of the supporting structures
Com
bina
tion
of sc
enar
ios?
Assessment of uncertainty
Scenario 1: Avalanche release outside of the controlled area
Zermatt, 1999
Scenario 2: Avalanche release inside the controlled area
Crap Stagias, 1984
Scenario 3: Avalanche release over the filled up structures
•Structure height Hk•Extreme snow depth Hext•Hext > Hk
Initial hazard map
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
Adapted hazard map
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
Topography avalanche path:•Inclination, terrain profile, cross-section
•Vegetation, terrain roughness
Avalanche dynamics calculations:•runout distance, impact pressure in
relation to return period
Planning and implementation of supporting structures
Assessment of the efficiency of the supporting structures
Com
bina
tion
of sc
enar
ios?
Assessment of uncertainty
Scenario 1: Avalanche release outside of the controlled area
Zermatt, 1999
Scenario 2: Avalanche release inside the controlled area
Crap Stagias, 1984
Scenario 2: Avalanche release inside the controlled area
Crap Stagias, 1984
Scenario 3: Avalanche release over the filled up structures
•Structure height Hk•Extreme snow depth Hext•Hext > Hk
Initial hazard map
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
Adapted hazard map
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
Adapted hazard mapAdapted hazard map
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
HighDanger:
Importance forLand use planning
ModerateNone
Prohibition area
Conditional-use areaNo restrictions
Avalanche releasedo
Hext
do
Hext
Fracture depth do
Hk Structure height Hk
Snow pack
Avalanche releasedo
Hext
do
Hext
Fracture depth do
Hk Structure height Hk
Snow pack
Avalanche releasedo
Hext
do
Hext
Fracture depth do
Hk Structure height Hk
Snow pack

45
SA.9 Return period and encounter probability
A parameter of high interest in avalanche land-use planning is the return period for which avalanche will reach selected location. The avalanche return period (T) can be defined as the average interval of time (usually measure in years) within which the runout distance is reached at a give location.
NT
N
ii∑
== 1
τ [5]
Avalanche frequency (F) is simply the reciprocal of return period and, if the return period is expressed in years, has the units of number of events per year.
TF 1
= [6]
Avalanche encounter probability (E) is the probability the avalanche return to a given location at least once during a given period of observation (L). Under the assumption that avalanche events in each year are statistically independednt of those in previous years, the encounter probability E can be calculated from the return period T and the length of time of interest L according to the following formula:
L
TE ⎥
⎦
⎤⎢⎣
⎡⎟⎠⎞
⎜⎝⎛−−=
111 [7]
From this equation if L=T the probability of encountering an avalanche at a givenlocation is about 0,65, whereas if L=2T the encounter probability is near 0,90. For example if the expected return period is 100 years, then 200 years of carefull observations would be required to be 90% confident thaqt the 100-year avalanche has been recorded (100 years for 65% confidence). This simple analysis shows why to specify long return period events reliable long-term observation are required.
The determination of avalanche return periods can be made by three methods: (i) by direct, long-term observation of avalanche runouts; (ii) by examination of vegetative clues; (iii) by analysis of climate records
and avalanche simulations.
SA.10 Magnitude frequency relationship
The relationship between avalanche frequency and either runout or magnitude is shown schematically on Figure 3.7.

46
Figure 3.7 – Relationship between avalanche frequency and magnitude (after Jamieson, 2001)
In this diagram, magnitude and runout are plotted on the same axis, although these terms are not interchangeable. Runout distance is the variable that is typically used in engineering applications to assess the size, or magnitude of an avalanche. Avalanche volume or mass may also be used, but is of limited usefulness in avalanche zoning applications because of the difficulty of modelling avalanche mass balance. It can be observed in Figure 3.7 that avalanche events range from high-frequency low-magnitude avalanches to low-frequency low-magnitude avalanches. For engineering applications, one is interested in the low frequency-high magnitude or runout events, known as the “tail” events on the F-M (frequency-magnitude) graph shown in Figure 3.7. In practice, avalanche events with return periods of 100 to 300 years are typically used for zoning and design of structures. Occasionally, very low frequency events such as those with return periods of 1000 years are used (e.g. Kristensen, Harbitz, and Harbitz, 2000), although this is an exception rather than a usual practice.

47
References Abele, G., 1974. Bergstürze in den Alpen – ihre Verbreitung, Morphologie und Folgeerscheinungen.
Wissenschaftliche Alpenvereinshefte 25, 230pp. Aleotti, P., Chowdbury, R., 1999. Landslide hazard assessment: summary review and new perspectives.
Bulletin of Engineering Geology and the Environment 58, 21-44. Aulitzky, H. (1970): Der Enterbach (Inzing in Tirol) am 26. Juli 1969; Versuch einer Analyse eines
Murganges als Grundlage für die Neuerstellung einer zerstörten Wildbachverbauung. Wildbach– und Lawinenverbau. 34. Jahrgang.
Aulitzky, H. (1973): Berücksichtigung der Wildbach- und Lawinengefahrengebiete als Grundlage der Raumordnung von Gebirgsländern. 100 Jahre Hochschule für Bodenkultur, Band IV, Teil 2, pp. 81–117 (in German).
Aulitzky, H. (1980): Preliminary two-fold classification of torrents. Internationales Symposion Interpraevent 1980 Bad Ischl, pp. 285–310.
Aulitzky, H. (1984): Vorlaeufige, zweigeteilte Wildbachklassifikation Wildbach- und Lawinenverbau 48, Sonderheft , pp. 7–60 (in German).
Bergmeister, K., Suda, J., Hübl, J., Rudolf-Miklau, F. (2008): Schutzbauwerke gegen Wildbachgefahren. In K. Bergmeister & J.-D. Wörner (eds.): Betonkalender 2008: Konstruktiver Wasserbau – Erdbebensicheres Bauen, pp. 91-289 (in German).
Blikra, L.H., Longva, O., Harbitz, C., Løvholt, F., 2005. Quantification of rock-avalanche and tsunami hazard in Storfjorden, western Norway. In: Senneset, K., Flaate, K., Larsen, J.O. [Eds.] Landslides and Avalanches. Proceedings 11th International Conference and Field Trip on Landslides, 1-10 September 2005. Balkema/Taylor & Francis, London, pp. 57-63.
BMLFUW (Bundesministerium für Land- und Forstwirtschaft, Umwelt und Wasserwirtschaft) (2006): Flood protection in Austria. Federal Ministry of Agriculture, Forestry, Environment and Water Management.
Bottino, G., Chiarle, M., Joly, A., Mortasa, G., 2002. Modelling rock avalanches and their relation to permafrost degradation in glacial environments. Permafrost and Periglacial Processes 13, 283-288.
Burkard, A. and Salm, B.: 1992, Die bestimmung der mittleren anrissmachtigkeit d0 zur berechnung von fliesslawinen [estimate of the average release depth d0 for the calculation of flowing avalanches], Internal Report of the Swiss Federal Institute for Snow and Avalanche Research, No. 668, Davos, Switzerland. (In German, also available in French under the title: Estimation de l’epaisseur moyenne de declenchement d0 pour le calcul des avalanches coulantes, translated in French by C. Ancey, Cemagref, 1994).
Coussot, P. and Meunier, M. (1996): Recognition, classification and mechanical description of debris flows. Earth Science Reviews 40, pp. 209-227.
Coussot, P.; Laigle, D.; Arattano, M.; Deganutti, A.; Marchi, L. (1998): Direct determination of rheological characteristics of debris flow. J. Hydr. Eng. 124 (8), pp. 865 – 868.
Crosta, G.B., Agliardi, F., 2002. How to obtain velocity thresholds for large rockslides. Physics and Chemistry of the Earth 27, 1557-1565.
Cruden, D.M., Varnes, D.J., 1996. Landslide types and processes. In: Turner, A.K., Schuster, R.L. (Eds.) Landslides, Investigation and Mitigation. Special Report 247, Transport Research Board, National Research Council, Washington, D.C., pp. 36-75.
Cunnane, C.: 1989, Statistical distribution for flood frequency analysis”, WMO Operational Hydrology Report No. 33, 61 pp.
D’Agostino, V. (1996): Analisi quantitativa e qualitativa del trasporto solido torrentizio nei bacini montani de Trentino Orientale [quantitative and qualitative analysis of sediment transport in torrents of mountainous catchments of eastern Trentino], Scritti dedicati a Giovanni Tournon, Associazione Idrotecnica Italiana, Sezione Liguria Piemonte e Valle d’Aosta (in Italian).
Dai, F.C., Lee, C.F., Ngai, Y.Y., Landslide risk assessment and management: an overview. Engineering Geology 64, 65-87.
Davies, T. R. H. (1997). “Using hydroscience and hydrotechnical engineering to reduce debris flow hazards.” Proc. First Int. Conf. on Debris Flow Hazards Mitigation, San Francisco, USA, ASCE, 787-810.
Davies, T.R., McSaveney, M.J., 2002. Dynamic simulation of the motion of fragmenting rock avalanches. Canadian Geotechnical Journal 39, 789-798.
Denlinger, R.P., Iverson, R.M., 2004. Granular avalanches across irregular three-dimensional terrain: 1. Theory and computation. Journal of Geophysical Research 109, F01014, doi:10.1029/2003JF000085.
Dussauge, C., Grasso, J.R., Helmstetter, A., 2003. Statistical analysis of rockfall volume distributions: Implications for rockfall dynamics. Journal of Geophysical Research 108, B6, 2286, doi:10.1029/2001JB000650.

48
Fell, R. (1994): Landslide risk assessment and acceptable risk. Canadian Geotechnical Journal, 31, 261-272.
Gallousi, C., Koukouvelas, I.K., 2007. Quantifying geomorphic evolution of earthquake-triggered landslides and their relation to active normal faults: An example from the Gulf of Corinth, Greece. Tectonophysics 440, 85-104.
Geomorphological Fluid Mechanics. Lecture Notes in Physics (LNP) 582, pp. 528 – 547. Giardino, M., Giordan, D., Ambrogio, S., 2004. G.I.S. technologies for data collection, management and
visualization of large slope instabilities: two applications in the Western Italian Alps. Natural Hazards and Earth System Sciences 4, 197-211.
Gubler, H. 1994. Swiss avalanche-dynamics procedures for dense flow avalanches. Report 51, Swiss Federal Institute for Snow and Avalanche Research. Davos, Switzerland.
Gumbel, E. J. 1958. Statistics of Extremes. New York, Columbia University Press. Hampel, R. (1977): Geschiebewirtschaft in Wildbächen [sediment budget of torrents], Wildbach- und
Lawinenverbau 41(1), pp. 3–34 (in German). Harbitz, C.:1998, EU programme SAME. A Survey of computational models for snow avalanche motion, Oslo,
Norwegian Geotechnical Institute, NGI Report 581220. (also in the SAME Report EUR 19069, Luxembourg, Office for Official Publications of the European Communities, European Commission Programme Energy, Environment and Sustainable Development, Project SAME: Snow Avalanche Mapping and Warning Systems in Europe, Contract ENV4-CT96-0258).
Harbitz, C.B., Issler, D. and Keylock, C.J. 1998. Conclusions from a recent survey of avalanche computational models. In: Hestnes, E., (Ed.), Proceedings of the Anniversary Conference 25 Years of Snow Avalanche Research, Voss, 12-16 May 1998. Oslo, Norwegian Geotechnical Institute, Publication 203, 128-135.
Hewitt, K., 1999. Quaternary moraines vs. catastrophic rock avalanches in the Karakoram Himalaya, Northern Pakistan. Quaternary Research 51, 220-237.
Hewitt, K., Clague, J.J., Orwin, J.F., 2008. Legacies of catastrophic rock-slope failures in mountain landscapes. Earth Science Reviews 87, 1-38.
Hübl, J., Habersack, H., Kienholz, H., Agner, P., Ganahl, E., Moser, M., Scheidl, Ch., Kerschbaumsteiner, W., Schmid, F. (2006): Disaster Information System of Alpine Regions (DIS-ALP): Methodik Teil 1, IAN Report 101, Institut für Alpine Naturgefahren, Universität für Bodenkultur-Wien (unpublished)
Hungr, O. (1995): A model for the runout analysis of rapid flow slides, Can. Geotechnical J. 32, pp. 610–623.
Hungr, O., Morgan, G. C., and Kellerhals, R. (1984): Quantitative analysis of debris torrent hazards for design of remedial measures, Can. Geotechnical J. 21, pp. 663–677.
Ikeya, H. (1989): Debris flow and its countermeasures in japan. Bulletin International Ass. Engineering Geol. 40, pp. 15–33.
International Association of Engineering Geology (1976): Engineering Geological Maps. A guide to their preparation Paris, UNESCO Press:79.
Iverson, M.R.and Denlinger, R.P. (2001): Flow of variably fluidized granular masses across three-dimensional terrain: 1. Coulomb mixture theory. Journal of Geophysical Research 106 (B1), pp. 537 – 552.
Iverson, R.M., Logan, M., Denlinger, R.P., 2004. Granular avalanches across irregular three-dimensional terrain: 2. Experimental tests. Journal of Geophysical Research 109, F01015, doi:10.1029/2003JF000084.
Jamieson, B. 2001. Snow Avalanche Dyanamics and Hazard Mitigation. ENCI 751 course notes, Fall 2001. Department of Civil Engineering, University of Calgary. Calgary, Canada.
Johnson, A.M. (1984): Debris flow. In: Brunsden, D.; Prior, D.B. (eds.): Slope Instability. John Wiley & Sons Ltd. , pp. 257 – 361.
Julien, P.Y.; O’Brien, J.S. (1997): Selected Notes on Debris Flow Dynamics. In: Armanini, A.; Michiue, M. (eds.): Recent developments on debris flows. Berlin: Springer, pp. 144 – 162.
Kaitna, R., Rickenmann, D. & Schatzmann M. (2007): Experimental study on the rheologic behaviour of debris flow material. Acta Geotechnica Vol. 2/2, pp. 71-85.
Korup, O., 2002. Recent research on landslide dams – a literature review with special attention to New Zealand. Progress in Physical Geography 26, 206-235.
Korup, O., 2004. Landslide-induced river channel avulsions in mountain catchments of southwest New Zealand. Geomorphology 63, 57-80.
Korup, O., Clague, J.J., Hermanns, R.L., Hewitt, K., Strom, A.L., Weidinger, J.T., 2007. Giant landslides, topography, and erosion. Earth and Planetary Science Letters 261, 578-589.
Korup, O., McSaveney, M.J., Davies, T.R.H., 2004. Sediment generation and delivery from large historic landslides in the Southern Alps, New Zealand. Geomorphology 61, 189-207.
Kristensen, K., Harbitz, C. and Harbitz, A. 2000. Significance of historical records for avalanche hazard zoning in Norway. In: Proceedings of the International Snow Science Workshop, Big Sky, Montana, October 1-6, 2000. American Avalanche Association, P.O. Box 1032, Bozeman, MT, 59771, USA, 475-479.

49
Kronfellner-Kraus, G. (1984): Extreme Feststofffrachten und Grabenbildungen von Wildbächen [extreme sediment loads and erosion of torrents], Proc. Int. Symp. Interpraevent, Villach, Austria, Band 2, pp. 109–118 (in German).
Kronfellner-Kraus, G. (1987): Zur Anwendung der Schätzformel fuer extreme Wildbach- Feststofffrachten im Süden und Osten Oesterreichs. Wildbach- und Lawinenverbau 51(106), pp. 187–200 (in German).
Malamud, B.D., Turcotte, D.L., Guzzetti, F., Reichenbach, P., 2004. Landslide inventories and their statistical properties. Earth Surface Processes and Landforms 29, 687-711.
Martinelli, M. 1974. Snow avalanche sites, their identification and evaluation. United States Department of Agriculture, Forest Service Agriculture Information Bulletin, 360.
McClung, D.M. and Schaerer, P.A. 1993. The Avalanche Handbook. The Mountaineers, Seattle, WA. McEwen, A.S., 1989. Mobility of large rock avalanches: evidence from Valles Marineris, Mars. Geology
17, 1111-1114. McSaveney, M.J., 2002. Recent rockfalls and rock avalanches in Mount Cook National Park New
Zealand. In: Evans, S.G., DeGraff, J.V. (Eds.), Catastrophic Landslides: Effects, Occurrence, and Mechanisms. Geological Society of America Reviews in Engineering Geology XV, pp. 35-70.
Mears, A.I. 1992. Snow-Avalanche Hazard Analysis for Land-Use Planning and Engineering. Colorado Geological Survey, Bulletin 49.
Mileti, D. and Myers, M. F. (1997): A bolder course for disaster reduction: imagining a sustainable future. Revista Geofisica, 47, 41-58.
Mizuyama, T., S. Kobashi, and G. Ou. (1992): Prediction of debris flow peak discharge. In International Congress Interpraevent, Volume 4, pp. 99–108.
Naef, D.; Rickenmann, D.; Rutschmann, P.; McArdell, B.W. (2006): Comparison of flow resistance relations for debris flows using a one-dimensional finite element simulation model. Nat. Hazards Earth Syst. Sci. 6, pp. 155 – 165.
Nakamura, J. (1980): Investigation manual on prediction of occurrence of Dosekiryu [debris flows], delineation of dangerous zone affected by Dosekiryu and arrangement of warning and evacuation system in mountain torrents in Japan, Internationales Symposion Interpraevent 1980 Bad Ischl . Band 3 1980, pp. 41–81.
O’Brien, J.S.; Julien, P.Y.; Fullerton, W.T. (1993)): Two-dimensional water flood and mudflow simulation. J. Hydraulic Engineering 119(2), pp. 244-261.
ONR 24 800 (2007): Schutzbauwerke der Wildbachverbauung – Begriffsbestimmungen und Klassifizierungen. Österreichisches Normungsinstitut 2007 (in German)
Parson, J.D.; Whipple, K.X.; Simoni, A. (2001): Experimental study of the grain-flow, fluid-mud transition in debris flows. Journal of Geology 109, pp. 427-447.
Phillips, C.J.; Davies T.R.H. (1991): Determining rheologic parameters of debris flow material. Geomorphology 4, pp.101 – 110.
Pierson, T.C. (1986): Flow behavior of channelized debris flows, Mount St. Helens, Washington. In: Abrahams, A.D. (ed.): Hillslope Processes. Boston: Allen and Unwin, pp. 269 – 296.
Pirulli, M., 2004. Numerical analysis of three potential rock avalanches in the Alps. Felsbau 22, 32- 38. Pitman, E.B.and Le L. (2005): A two-fluid model for avalanche and debris flows. Phil. Trans. R. Soc. A.
363(1832), pp. 1573 – 1601. Poisel, R., Hermann, S., Kittl, H., Preh, A., 2003. Die Grosshangbewegung Larchberg-Galgenwald bei
Murau. Felsbau 21, 110-119. Prager, C., Zangerl, C., Patzelt, G., Brandner, R., 2008. Age distribution of fossil landslides in the Tyrol
(Austria) and its surrounding areas. Natural Hazards and Earth System Sciences 8, 377-407. Pudasaini, S.P.; Wang, Y.; Hutter, K. (1993): Modelling two-phase debris flows down general channels
and their numerical simulation. Natural Hazards and Earth System Sciences 5 (2005), pp. 799 – 819. Radbruch-Hall, D.H., 1978. Gravitational creep of rock masses on slopes. In: Voight, B. (Ed.), Rockslides
and avalanches 1. Elsevier, Amsterdam, pp. 607-657. Raetzo, H., Latelin, O., Tripet, J.P., Oswald, D., Dapples, F., 2002. Landslides and evaluation of
triggering factors, hazard assessment practice in Switzerland. In: Rybar, J., Stemberk, J., Wagner, P. (Eds.), Landslides. Proceedings 1st European Conference on Landslides 24-26 June 2002, Prague. Balkema, Rotterdam, pp. 455-460.
Rickenmann, D. (1999): Empirical relationships for debris flows. Natural Hazards 19, pp. 47–77. Rickenmann, D. and Zimmermann, M. (1993): The 1987 debris flows in Switzerland: documentation and
analysis. Geomorphology 8, 175-189. Rickenmann, D.; Laigle, D.; McArdell, B.W.; Huebl, J. (2005): Comparison of 2D debris-flow models
with field events. Computational Geosciences. Online. Romang and Marghreth, 2006. Protective measures and risk management. Basics and examples of avalanche and
torrential risks in Switzerland. Risk 21 – Coping with risks due to natural hazard in the 21st century, Amman, Dannenmann & Vulliet Eds., Taylor & Francis Group, London.

50
Salm, B., Burkard, A. and Gubler, H.: 1990, Berechnung von Fliesslawinen: eine Anleitung für Praktiker mit Beispielen [avalanche calculations: a practical method with examples], Eidg. Inst. Schnee- und Lawinenforsch. Mitt., 47, 41 pp. (In German).
Sandersen, F., Bakkehøi, S., Hestnes, E., Lied, K., 1996. The influence of meteorological factors on the initiation of debris flows, rockfalls, rockslides and rockmass stability. In: Senneset, K. (ed) Landslides. Proceedings of the 7th Symposium on landslides, Trondheim, 17-21 June 1996, pp. 97-114.
Sartori, M., Baillifard, F., Jaboyedoff, M., Rouiller, J.D., 2003. Kinematics of the 1991 Randa rockslides (Valais, Switzerland). Natural Hazards and Earth System Sciences 3, 423-433.
Schilling, S. P. and Iverson, R. M. (1997): Automated, reproducable delineation of zones at risk from inundation by large volcanic debris flows, Proc. First Int. Conf. on Debris Flow Hazards Mitigation, San Francisco, U.S.A., ASCE, pp. 176–186.
Schmid, F. (2005): Hazard zone map – curse or blessing? Journal of Torrents, Avalanche, Landslide and Rock Fall Engineering, 152, 93-104.
Schneider, J.L., Pollet, N., Chapron, E., Wessels, M., Wassmer, P., 2004. Signature of Rhine Valley sturzstrom dam failures in Holocene sediments of Lake Constance, Germany. Sedimentary Geology 169, 75-91.
Segalini, A., Giani, G.P., 2004. Numerical model for the analysis of the evolution mechanisms of the Grossgufer rock slide. Rock Mechanics and Rock Engineering 37, 151-168.
Takahashi, T. (1991): Debris Flow, IAHR Monograph Series, Balkema Publishers, The Netherlands. Tarchi, D., Casagli, N., Moretti, S., Leva, D., Sieber, A.J., 2003. Monitoring landslide displacements by
using ground-based synthetic aperture radar interferometry: Application to the Ruinon landslide in the Italian Alps. Journal for Geophysical Research 108B, ETG 10-1- ETG 10-14.
UNESCO, 1981. Avalanche Atlas: illustrated international avalanche classification. United Nation Publication. VanDine, D. F. (1985): Debris flows and debris torrents in the Southern Canadian Cordillera. Can.
Geotech. J. 22, pp. 44–68. Voellmy, A.: 1955, Über die Zerstörungskraft von Lawinen [on the destructive forces of avalanches], Schweiz.
Bauztg., 73(12/15/17/19), 159-165, 212-217, 246-249, 280-285, (In German).Ancey, C. (2001): Debris Flows and Related Phenomena. In: Balmforth, N.J.; Provenzale, A. (eds):
von Poschinger, A., 2005. Der Flimser Bergsturz als Staudamm. Bulletin für Angewandte Geologie 10, 33-47.
Weinmeister, H. W. (1994): Machbarkeit und Grenzen der WLV – Physikalische und ökologische Aspekte. Workshop „Wildbachverbauung und Gewässerökologie", 8.-10. Juni 1994 in Scharfling, O.Ö.. Wildbach– und Lawinenverbau. 58. Jahrgang, Heft 126, 47-59.
Wen, B., Wang, S., Wang, E., Zhang, J., 2004. Characteristics of rapid giant landslides in China. Landslides 1, 247-261.
Whalley, W.B., 1983. The magnitude and frequency of large rockslides in Iceland in the postglacial. Geografiska Annaler A 65, 99-110.
Whitehouse, I.E., 1983. Distribution of large rock avalanche deposits in the central Southern Alps, New Zealand. New Zealand Journal of Geology and Geophysics 26, 272-279.
Whitehouse, I.E., Griffiths, G.A., 1983. Frequency and hazard of large rock avalanches in the Central Southern Alps, New Zealand. Geology 11, 331-334.
Willenberg, H., Ladner, F., Spillmann, T., Low, S., Sambeth, U., Evans, K., Eberhardt, E., 2002. Aufbau eines Multi-Parameter-Überwachungssystems für Felsrutschungen. Felsbau 20, 44-51.
Wilson, A.J., Petley, D.N., Murphy, W., 2003. Down-slope variation in geotechnical parameters and pore fluid control on a large-scale Alpine landslide. Geomorphology 54, 49-62.
Zeller, J. (1985): Feststoffmessung in kleinen Gebirgseinzugsgebieten. Wasser, Energie, Luft 77(7/8), pp. 246–251 (in German).
Zimmermann, M., Mani, P., Gamma, P., Gsteiger, P., Heiniger, O., and Hunziker, G. (1997a): Murganggefahr und Klimaänderung - ein GIS-basierter Ansatz. Schlussbericht NFP 31, vdf-ETH, Zürich, Switzerland, 161p.
Zimmermann, M., Mani, P., Romang, H. (1997b): Magnitude-frequency aspects of Alpine debris flows. Eclogae Geologicae Helvetiae, 90(3), 415-420.