
D2101521SX Merlin Software Manual - DP Precision,...
104
SOFTWARE MANUAL Version 1.5.21
Transcript of D2101521SX Merlin Software Manual - DP Precision,...
SOFTWARE MANUALVersion 1.5.21

- 2 -
INDEX
1 INTRODUCTION.........................................................................2 INITIAL SETTINGS......................................................................3 PROGRAMMING.........................................................................4 BATCHES....................................................................................5 MEASUREMENT PAGE..............................................................6 GLOBAL SETUP..........................................................................7 PROTOCOLS..............................................................................8 TRACING DATA..........................................................................9 MERLIN DIGITAL SIGNALS MANAGEMENT..................................10 BACKUP/RESTORE .........................................................................APPENDIX - STATISTICAL ANALYSIS.................................................................APPENDIX - PROGRAM THE WINDOWS® CE OPERATING SYSTEM.......................
PAGE. 4PAGE. 12PAGE. 25PAGE. 37PAGE. 42PAGE. 51PAGE. 58PAGE. 68PAGE. 72PAGE. 81PAGE. 84PAGE. 92

- 3 -

- 4 -
1 INTRODUCTIONDesigned for simple measuring applications up to 16 sensors/measurements and basic statistics analysis, Merlin represents a new concept of gage computer using the same technologies created for PDA and portable electronics, for data collection from traditional or wireless measuring devices.The Merlin software is based on Microsoft® .Net® technology and uses the Microsoft® Windows® CE operating system.The simple, user-friendly touch-screen user interface can be used to program and per-form measurements without the need for additional input devices.
A command bar containing a series of icons corresponding to the selected menu is always displayed at the bottom of the screen, each icon includes a brief description; move the mouse over any icon to display a more detailed description of the com-mand associated with the icon in the centre of the bar.
The user interface is a touch-screen, so it is necessary to tap the icons and fields in order to interact with the Merlin software, alternatively, it is also possible to connect a USB type mouse.
MENU: tap this icon to select the main menu from which it is possible to access all the software functions at any moment.
OK: this icon appears in all the programming windows when it is ne-cessary to confirm that the user wishes to save the data.
1.2 Command bar
1.3 User interface
1.1 Operating limitsMaximum number of connectable sensors 16
Maximum number of characteristics 16
Maximum number of steps 16
Maximum number of classes 32
Maximum number of part programs 200
Maximum number of batches 200

- 5 -
CANCEL: this icon appears in all programming windows and it permits to exit without saving the data.
ENTER: it permits the user to confirm data entered via the virtual keypad.
The menu can be used to access all the functionalities.
Switch between ADMINISTRATOR and OPERATOR user levels
Access to configuration phase
Access to programming phase
Access to BATCH creation phase
Access to MEASUREMENT page
If the menu contains more than 5 icons, this command can be used to scroll through the subsequent icons.
1.4 Menu

- 6 -
Access to sub-menu where it is possible to change the LANGUAGE
Access to MEASUREMENT DEVICES MAP page where it is possible to insert additional devices (See chapter 2)
Access to I/O LINES MAP page that provides a rapid overview of all the I/O signals associated with the connected devices (See paragraph 2.7).
Access to LIST OF SERIAL PROTOCOLS page that lists all the standard pro-tocols handled by Merlin and enables the user to create customised protocols (See chapter 7).
Access to MAIN SETUP page (See chapter 6).
Access to TRACING DATA (See chapter 8).
Access to software function which enables the BACKUP RESTORE of the application (See Chapter 10).
Display the MERLIN VERSION, ALLOCATED MEMORY and FREE SPACE REMAINING ON DISC.
1.4.1 Settings menu

- 7 -
Exit from the measuring software.
Access to PART PROGRAM LIST (See paragraph 3.2).
Access to MASTER SET LIST (See paragraph 3.1).
1.4.1 Programming menu
NOTE: Available languages: English, Italian, German, French, Japane-se, Spanish, Portuguese, Chinese, Dutch, Swedish, Polish, Hungarian, Romanian, Czech, Korean and Turkish.For Chinese, Korean and Japanese languages an appropriate operating system is required.

- 8 -
The operator can enter data by using the virtual keyboards that vary in their format depending on the language and type of data to be entered or modified.Alphanumerical ENTER icon to confirm the data that have been entered.
1.5 The virtual keyboards
NOTE: It is also possible to connect a USB keyboard to Merlin, or a laser scanner (for reading barcodes or datamatrix) if it is configured in wedge emulation.
Oriental keyboards available:
Chinese830MEFBC00
Japanese830MECBC00
Korean830MEEBC00
Merlin Si Si Si

- 9 -
When the operator selects the language from the general Menu, the software opens the corresponding keyboard and handles all the communications with the IME and selects the appropriate O.S. settings for the specific input language.In the case of Japanese, it is possible to select between 3 different keyboard types: Hiragana, Katakana, Romanji, in additional to the traditional versions. When the operator taps a button, the corresponding character is displayed in the text box at the top of the page.
The EXIT key is replaced with a character selector key and the Enter key is replaced by the OK button, which is used to confirm the character selected from the list.
Once the operator has finished entering the string, the standard buttons reappear and it is possible to confirm the input by tapping the ENTER button.
1.5.1 Using the Japanese keyboard (Hiragana or Katakana)
- 10 -
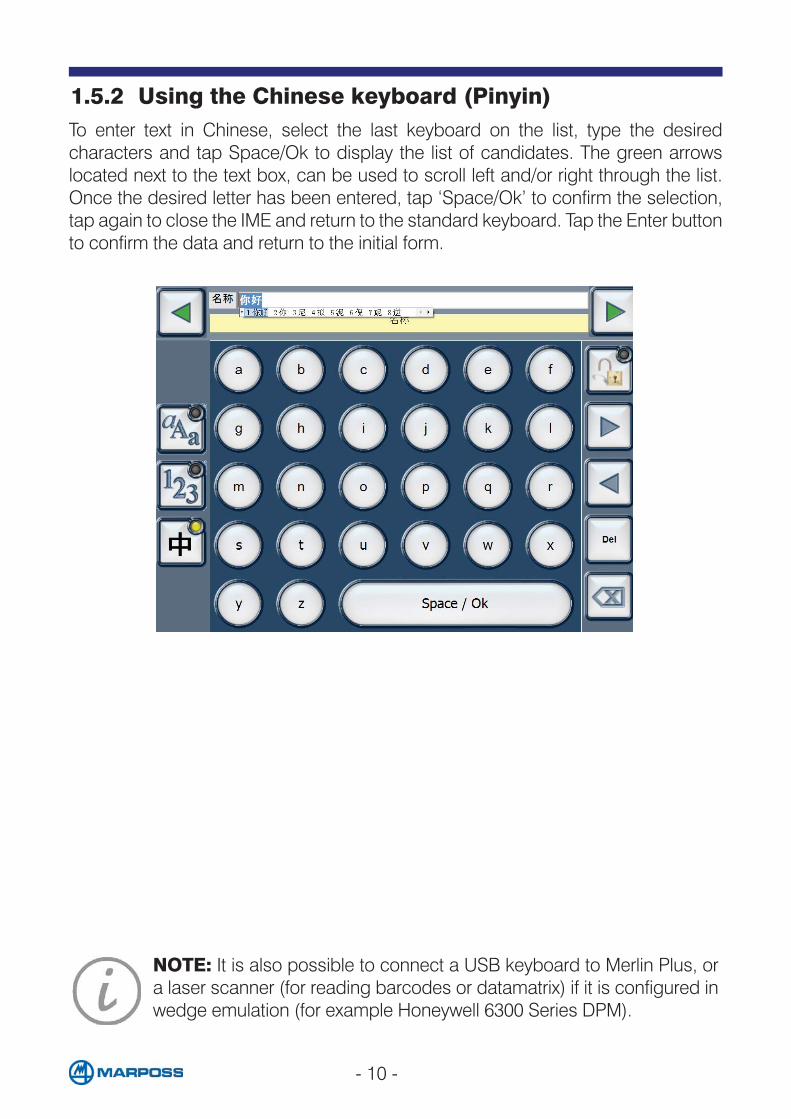
To enter text in Chinese, select the last keyboard on the list, type the desired characters and tap Space/Ok to display the list of candidates. The green arrows located next to the text box, can be used to scroll left and/or right through the list. Once the desired letter has been entered, tap ‘Space/Ok’ to confirm the selection, tap again to close the IME and return to the standard keyboard. Tap the Enter button to confirm the data and return to the initial form.
1.5.2 Using the Chinese keyboard (Pinyin)
NOTE: It is also possible to connect a USB keyboard to Merlin Plus, or a laser scanner (for reading barcodes or datamatrix) if it is configured in wedge emulation (for example Honeywell 6300 Series DPM).

- 11 -
2 INITIAL SETTINGS
When a new and unprogrammed Merlin is switched on, the MEASUREMENT DEVICES MAP page is displayed, initially empty.
To carry out the initial set-up, proceed as follows; note that it is not necessary to connect any of the devices at this stage.• Select NON P&P DEVICE from the command bar• The Device SETTINGS WINDOW appears, select the type of device connected to
Merlin by tapping the DEVICE TYPE FIELD repeatedly (See paragraph 2.2).

- 12 -
• Enter a name in order to identify the device in the DEVICE NAME FIELD.• Tap Ok to save the data; if the device has not connected yet, the message “ER-
ROR OPENING DRIVER” is displayed.As new devices are entered the MEASUREMENT DEVICES MAP begins to fill up, displaying a line for every input available on each device.
NOTE: if more than one device of the same type is connected make a note of the order in which they were connected; this is because, if it is necessary to disconnect them they must be reconnected in the same order otherwise Merlin will fail to recognize them.
Key: Each transducer is identified by a three figure value, for example, T213. The first figure identifies the device, the second the channel and the third the instance. Hence, the transducer identified as T213 corresponds to the third instance of the first transducer on the second device.NOTE: If a DigiCrown network with more than 9 transducers, it may be necessary to use 4 figures to identify the transducers (e.g. T1121). In this case, the middle two figures indicate that it is the twelfth transducer on the network.
NOTE: If it is necessary to modify a device type that has already been configured, the system checks that the new type has the same number of inputs, and hence that it is compatible with the previous type. This is especially useful when replacing a faulty device.

- 13 -
Defining multiple instances for the same transducer (by the GENERAL SETUP menu, see para. 6.1) makes it possible to use different transducers in the measurement formulas, provided the same device and input are used. In fact, the transducers connected to a given device may have different operating ranges, sensitivity etc. The different instances are identified by the third figure in the TRANSDUCER NAME field, (e.g. T121 and T122 are two instances of the second channel on the first device).
If the MULTIPLE TRANSDUCER INSTANCE option is activated in the set-up, the Device map displays an additional 3 columns that represent all different configurable istances for transducers, to every istance, it is possible to assign during the configuration, a customized name (for example the fixture name where the sensors are installed) in this way the list can appear easy to read.
2.1 Multiple transducer instance
The commands DELETE device and TRANSDUCERS VIEW, available when a transducer column is selected, can delete or add or modify an istance.It is possible to leave the cells empty, if the channel is not used by an istance, it is possible to manage up to 4 istances for every transducer.
- 14 -
The following is a list of devices that can be connected to Merlin.Whatever type of device is selected, it is necessary to enter a customized name in the related field
• M1 Wave: Marposs Bluetooth® buffers with electrical capsules (see par. 2.3.1)• I-Wave: Marposs Bluetooth® buffers with mechanical capsules (see par. 2.3.1)• MultiWave: Marposs multisection buffers with Bluetooth® interface. Manages up to
7 measurement channels, excluding the optional heat sensor (i.e. a maximum of 6 channels if the system is also fitted with the heat sensor) (see par. 2.3.1)
• Easy Box U1AIR: 1 pneumatic input• Easy Box U3AIR: 3 pneumatic inputs• Easy Box U4AIR: 4 pneumatic inputs• Easy Box U4H: for Marposs standard half-bridge/HBT transducers (see par. 2.3.5)• Easy Box U4D: Mitutoyo Digimatic compatible• Easy Box U4T: half-bridge/HBT compatible with Tesa amplifiers• Easy Box U4F: for Marposs standard full-bridge/LVDT transducers• Easy Box U8IO: 8 digital Input/Output lines• Easy Box U4P: push button for remote control and data acquisition (see par. 2.3.2)• Easy Box U4M: “MG” 4 HBT transducers interface• Easy Box U4TP_E: for type-E thermocouples• Easy Box U4TP_J: for type-J thermocouples• Easy Box U4TP_K: for type-K thermocouples• Easy Box U4TE: for “Trac” tranducers• Easy Box U4E: 3 inputs for incremental transducers (see par. 2.3.3)• Easy Box U4F-HR: for Marposs standard full-bridge/LVDT transducers with
sub-micron resolution• Easy Box U4S: 4 serial devices (see par. 2.3.4)• Digi Crown: Marposs digital network for various devices (see par. 2.3.6)• Serial gauge: devices equipped with RS232 interface (see par. 2.3.7)• Vectrix DR-200R: wireless system to connect various devices (see par. 2.3.8)
2.2 Basic devices
NOTE: If it is necessary to connect more than 5 Easy Boxes to the Merlin, use a HUB USB with its own power supply (7 USB ports: D-Link DUB H7, 4 USB ports: LINDY Smart Hub Pro powered - code 4701300468). As reported in the operating limits table (paragraph 1.1) the limit of connectable sensors is 16 and then is possible connect up to 4 devices which can manage 4 sensors, (i.e. EasyBox U4F, U4Air...), 5 devices which can manages 3 sensors (i.e. EasyBox U3Air or U4E) up to 8 devices which can manage one sensor (EasyBox U1Air, iWave, M1Wave...); it is possible to connect up to 7 channels Bluetooth® working simultaneously.

- 15 -
On some devices it is necessary to set up additional configuration parameters, as well as the name.
Box fitted with 4 push-buttons, used for remote control and data acquisition. Each input may be defined as NORMAL or COMMUTATIVE, these two modes differ as follows:• NORMAL: this button is activated by pressing it, and deactivated releasing it.• COMMUTATIVE: the button remains active even after it is released and must be
pressed again in order to deactivate it.
Easy Box with 3 inputs for incremental or absolute type, rotary or linear encoders, with analogue or digital interfaces.• EXTERNAL POWER SUPPLY: The U4E requires its external power supply unit when
the current consumption of the connected encoders is over 200 mA.
The Easy Box U4S is recognized automatically by the system, so that no set-up is required. The programming of these inputs is handled within the parameters of the SERIAL GAUGE.
2.3 Devices with additional parameters
2.3.2 Easy Box U4P
2.3.3 Easy Box U4E
2.3.4 Easy Box U4S
2.3.1 M1Wave, I-Wave e MultiWave
NOTE: Only one Easy Box U4S may be connected to Merlin.
NOTE: The maximum number of Bluetooth® devices that may be con-nected to Merlin is 16, and up to 7 of these may be accessed simulta-neously.
Tap BINDING to execute interfacing/pairing with a M1 Wave, I-Wave or MultiWave plug
Configurable parameters:• ACQUISITION SPEED: data acquisition speed (Options: SLOW 10 sample/second,
FAST 40 sample/s, MEDIUM 20 sample/s, default: MEDIUM).• BATTERY TYPE: select the battery type of the Wave plug (Options: ALKALINE, NI-
MH, LI-ION, default: ALKALINE).• BATTERY WARNING LEVEL: the system provides the battery level indication
(Options: 05%, 10%, 25%, 40%, 60%, 85%, default: 25%).• TURN OFF TIME (SEC): the plug switches itself off if it is inactive for a given period
(default: 1200 sec, minimum = 30, maximum 28800 = 8 hours)

- 16 -
2.3.5 Easy Box U4H
NOTE: after the selection of the sensor type, the system automatically propose the RESOLUTION and RESPONSE values. Tapping the MODE field is possible to select the required compromise. Through that device, it isn’t allow to manage the complete range in some pencil probe models.
2.3.6 Digi CrownUp to one Digi Crown digital network (31 modules) can be connected to the RS232-COM port and managed by Merlin. The following Digi Crown boxes are compatible: Digicrown 232, Digicrown PSU, Digicrown BOX (single channel only), Digicrown I/O (Sink, Source and Only Input versions), Digicrown PBB (push button for “Only Input” I/O module)
Tap ADD to execute the Digi Crown digital network automatic recogni-tion (only modules with firmware V1.3 or greater are permitted).
Configurable parameters:• NET BAUDRATE: network data transmission speed expressed in baud/s (options:
9600, 208.3k; default: 208.3k).• BAUDRATE: Digi Crown modules communication speed in baud/s (options:
4800, 9600, 19200, 38400, 57600, 115200, default: 115200).
NOTE: The Merlin with a DigiCrown digital network cannot accept a Red Crown pencil probe connected to any box of this network.
- 17 -
2.3.7 Serial gauge
2.3.8 Vectrix DR-200R
In order to connect them, serial type devices require a physical port (RS232 or USB) and a communication protocol.Configurable parameters:• DEVICE NAME: to enter the unit name using the keyboard.• PROTOCOL NAME: STANDARD or PERSONAL protocol type in use (See chapter 7).• MANUFACTURER: manufacturer’s name of the serial gauge.• SERIAL PORT: comunication serial port (options: COM1, INPUT 1/2/3/4 – U4S).
The Vectrix telemeasure units are used to send wirelessly the measure from a transmitter (connected to a gauge) to a receiver. The Vectrix receiver operates con-nected to the COM port of the Merlin only (no EasyBox U4S).
Tap on BINDING to interface a Vectrix transmitter. Afterwards tap the “data” button on the transmitter itself, in order to establish a commu-nication between the transmitter and the receiver.

- 18 -
Once at least one device has been added to the MEASUREMENT DEVICES MAP page, it is possible to select the commands that are used to set the parameters for each transducer.
Tap on TRANSDUCERS SETTINGS to edit the transducer parameters. The following parameters are always present, for all device types.
2.4 Transducer settings
• TRANSDUCER: transducer name (max. 5 characters editable using the keybo-ard). The transducer default name consists of three figures, representing the device number (as indicated on the MEASURE DEVICE MAP), the channel number and the instance number. For example: T231 indicates the first instance of the second device on the third channel.
• SERIAL NUMBER: it can be edited using the keyboard.• DESCRIPTION: it can be edited using the keyboard.• GAGE: the gage name can be edited using the keyboard, only in multi-instance.• MEASURE UNIT: the available measurement units depend on the device type.• PRECISION: number decimal places displayed (options: x1, x0.1, x0.01, x0.001,
x0.0001, x0.00001)• OVR ±: transducer over-range settings. • CORRECTION: sensitivity correction; if non-standard transducers are in use, the
different behaviour can be compensated with this multiplication factor.

- 19 -
There are two tabs available for this device, the second depends on the type of encoder selected in the INTERFACE TYPE field.
2.4.1 Parameters for Easy Box U4E
• SIGN INVERSION: transducer signal sign inversion option and behaviour.
TRANSDUCER TYPEMEASUREMENT VALUE
WHEN SENSOR IS PUSHED
SIGN
INVERSION
PENCIL PROBE LVDT-HBT DECREASING YES
WIRELESS BORE GAUGE M1WAVE-MINIWAVE (LVDT) DECREASING NO
WIRELESS BORE GAUGE M1WAVE-MINIWAVE (HBT) INCREASING NO
PNEUMATIC (USED WITH U1AIR, U3AIR, U4AIR DECREASING YES
• RANGE: transducer measurement field (expressed in μm)• ARM RATIO: to set the arm ratio• RESOLUTION: real measurement accuracy• OFFSET: additional constant applied to the value measured by the transducer
Tap on NEXT INPUT to setup the transducer related to the next input.
- 20 -
GENERAL PARAMETERS TAB• RANGE±: measurement range of the encoder or line. • TYPE OF INTERFACE: DIGITAL / COUNTER/ ANALOGUE
• TYPE OF SENSOR : • LINEAR: to be used for linear positioning transducers (optical scales typically).• ROTARY: to be used for angular positioning transducers (rotary encoders typically), when an information is required about both the number of revolutions made and the position within the lap.• PERIODICAL: to be used for angular positioning transducers (rotary encoders typically), when an information is required only about the position within the lap, but not about the number of revolutions made (for example in applications concerning spindles).
• STEP: It defines the variation (in the measuring unit mentioned above) against a STEP of the sensor. For example:
- if a scale with 20 μm step is used, 20 has to be programmed - if an encoder featuring 7200 step/rev is used, 0.05 has to be programmed (360°/7200=0,05 °/step)• MAX. FREQUENCY: defines the maximum frequency of the signal generated by
the sensor (expressed as PULSES-STEPS per second), if the frequency exceeds this value an error signal is generated and the counter is decalibrated. The ma-ximum value depends on the TYPE OF INTERFACE:- DIGITAL AND COUNTER: 2500 Ksteps per second- ANALOGUE: 250 Ksteps per second
• REAL FREQUENCY: in this column the control frequency is displayed, which the hardware is able to deploy against the programmed value of the parameter MAX FREQUENCY.
• TYPE OF CALIBRATION: • ON CURRENT POS.: the transducer value becomes the value programmed in the parameter Marker Position when the zeroing command is received. • NONE: No calibration is foreseen.• TEST ON MARKER: It enables the input of the reference signal I or M (and the
related connection checks)
ANALOGUE TAB• AMPLITUDE TOLERANCE (%): It defines the maximum percentage variation al-
lowed for the amplitude of the resulting of the signals A and B, i.e. (A2+ B2)1/2
• AMPL. CHECK ENABLE: It enables the control described in the previous point• OFFSET A: Offset value of the channel A, normally calculated by the specific
calibration utility • OFFSET B: Offset value of the channel B, normally calculated by the specific
calibration utility• AMPLITUDE A: Amplitude of the signal of channel A, normally calculated by the
specific calibration utility
- 21 -
• AMPLITUDE B: Amplitude of the signal of channel B, normally calculated by the specific calibration utility
• ANGULAR CORRECTION: Phase correction of the signal of channel B, with respect to the signal of channel A, normally calculated by the specific calibration utility
DIGITAL TAB• DIVISION: It allows to increase the resolution of the digital sensors by splitting
the steps in 2 or 4 parts according to the logical combination of the signals. The possible choices are:
• STEP: no subdivision of the step. The resolution is set in the “STEP” box in the related row of the general data table. • HALF STEP: subdivision of the step in two parts. The resolution is half the value set in the “STEP” box in the related row of the general data table. • QUARTER STEP: subdivision of the step in four parts. The resolution is on quarter of the value set in the “STEP” box in the related row of the general data table.• ALARM: The control can be enabled only if the encoder has this output signal,
which normally is not present. The possible choices are YES or NO.• WARNING: It enables the report of a warning alert in response to linking pro-
blems of the channels (open circuit, short circuit, exceeding of the limits of com-mon mode, signal below threshold, etc...). The possible choices are YES or NO.
COUNTER TAB• COUNTING EDGE: It allows to program on which front(s) of the input signal(s)
the count shall be made (in the case Frequency/Direction it applies only to the fronts of the signal Frequency). The possible choices are:
• RISING EDGE: the count is made on the rising edge of the signal. • FALLING EDGE: the count is made on the falling edge of the signal. • RISING & FALLING EDGE: the count is made on both the rising and falling edge of the signal.• DIGITAL FILTER: Enables digital filtering of the input signal to reduce the probabili-
ty of incorrect counting. Filtering is only activated if in the related row of the table of general data a max. frequency less than or equal to 712 KStep / second has been programmed. The possible choices are YES or NO.

- 22 -
2.5 Input reading
2.6 Transducers view
Once the transducer programming procedure has been completed, it is possible to check the transducers by tapping on READ INPUTS. This opens the Input page where the individual transducer readings are displayed in real time.
If the MULTIPLE TRANSDUCER INSTANCE on the MEASUREMENT DEVICES MAP page has been activated in the settings, the operator can use the TRANSDUCERS MAP command to view the various different transducer instances which are available.
Defining more than one instance, for the same transducer, enables the system to use multiple transducers in the measurement formula on the same device and in-put; in fact, the transducers connected to a given device input may have different measurement ranges, sensitivities etc., the different instances are identified by the third figure in the TRANSDUCER NAME field.For example: T121 and T122 are two instances of the first device second channel.The ADD and DELETE commands can be used to add or delete a new instance.The user can create up to four instances for each channel.
The ZEROING and the ZERO RESET functions allow to set/reset a zero value on the transducers. This value is for set-up purpose only, and does not affect the measu-rement value.

- 23 -
2.7 Digi Crown probe replacement function
In order to simplify the Digi Crown probe replacement after failure, we added the REPLACE button in the DEVICE CONFIGURATION PAGE. It follows the sequence to carry out a single probe replacement.
From the menu, tap on SETTINGS. Select MEASURE DEVICES to enter the map of the measure devices previously configured.
In the MEASURING DEVICES MAP, the system automatically detects which a digital probe has been replaced, showing both the serial number of the old probe and the serial number of the new one.
Select the Digi Crown driver (DIGINET) in the list and then tap DEVICE SETTINGS.
In the DEVICE CONFIGURATION page it is now possible to ADD or REPLACE a new probe. Tapping the REPLACE button on the toolbar, it will change definitely the two probes, while tapping ADD the software will add the new probes in the list of the available transducers.

- 24 -
2.8 I/O lines map
This page can be used to view the status of all the I/O bits associated with the con-nected devices.

- 25 -
3 PROGRAMMING
3.1 Master SetThe MASTER SETS are groups of real masters used to zero and adjust the sensitivity on the programmed characteristics. Each set can be created using one (ZEROING ONLY), two (min/max mastering - SENSITIVITY) or three masters (ZEROING & SENSITIVITY). For each master it is possible to program a master value, a SERIAL NUMBER and a MESSAGE to guide the operator during the acquisition.
From the menu, select PROGRAMS then MASTER SET to access the MASTER SET LIST PAGE, where it is possible to use one of the following functions:• ADD: to create a new MASTER SET.• EDIT: to modify an existing MASTER SET
• DEL: to delete a MASTER SET
• COPY: to create a new MASTER SET by copying an existing one
NOTE: this feature causes the loss of ZEROING/SENSITIVITY compatibility. It means that in case of a Merlin software updating, the MASTER SET fields need to be programmed and a new ZEROING/SENSITIVITY acquisition must be performed prior to restart the production.
3.1.1 Miscellaneous TABWhen creating a new MASTER SET access the MISCELLANEOUS in order to define the basic MASTER SET information.

- 26 -
The configuration parameters are described below.• NAME: name of the MASTER SET to be programmed.• DESCRIPTION: description of the MASTER SET (optional).• TYPE: MASTER SET TYPE
• ZEROING: one static master• SENSITIVITY: two static masters• ZEROING & SENSITIVITY: three static masters• DYNAMIC ZEROING: a dynamic master
• PRECISION: defines the number of places after the decimal point for the dimensions that make up the MASTER SET (options: x1, x0.1, x0.01, x0.001, x0.0001, x0.00001).
• MEASURE UNIT: measurement units for the dimensions that make up the MASTER SET (options: mm, in, deg, g, °C, °F, mm).
3.1.2 Dimensions TABAfterwards tap on the DIMENSIONS tab where, according to the number of dimensions of the MASTER SET, it is possible to set the ZERO LIMIT, the PERIODIC LIMIT and the ZERO MASTER value for each dimension. If MASTER SET TYPE foresees up to three masters for zeroing and sensitivity correction, two more master values must be defined for each dimension.Tap on the field to be changed, and then EDIT the value tapping on the relevant button.
• ZERO LIMIT: this value is the maximum permissible difference between the last acquired zero and the first.
• PERIODC LIMIT: this value is the maximum permissible difference between the last acquired zero and the last but one.
• ZERO MASTER: this is the certified value of the master associated with the zero.

- 27 -
• FUNCTION: this is the function used for dynamic zeroing.• STATIC: the zero is acquired at the STOP
• MAX: the zero is acquired at the point that corresponds to the dynamic ma-ximum between START and STOP
• MIN: the zero is acquired at the point that corresponds to the dynamic mini-mum determined between START and STOP
• (MAX+MIN)/2: the zero is acquired at the arithmetic mean point, determined between START and STOP.
3.1.3 Serial number TABAt last type in the SERIAL NUMBER of the master and, if it is necessary, a MESSAGE for prompting the operator.

- 28 -
3.2 Part program definition
3.2.1 Miscellaneous TAB
To define a new PART PROGRAM proceed as follows:
Select PART PROGRAM from the PROGRAMS MENU in order to access the PROGRAMMING PHASE. Tap ADD to create a new PART PROGRAM.
Tap on NAME to enter the NAME of the part to be programmed, on DESCRIPTION to enter a DESCRIPTION (if it is required) and DRAWING NUMBER to enter the drawing reference.The configuration parameters are described below.• NAME: name of the part to be programmed.• DESCRIPTION: description of the part to be programmed.• DRAWING NUMBER: reference DRAWING NUMBER.• LIVE DISPLAY: if this parameter is enabled, measurement values are updated conti-
nuously during the acquisition phase; if it is disabled, the CHARACTERISTIc values are displayed only once the measurement has been completed (options: YES/NO).
• PIECES EXPORT: if this parameter is setted on FILE-CSV, at the end of each piece a CSV file containing the last measured values will be exported.
NOTE: Merlin can manage up to 200 PART PROGRAMS.NOTE: The PART PROGRAM name may not contain characters that Window does not accept as part of file names (E.g. / \ : * ? “<>| ø...). If any of these characters is used, the system will allocate the PART PROGRAM a string containing the exportation date and time (YYYYMMDDhhmmss) during the BATCH export phase.

- 29 -
3.2.2 Tracing data request TABThis programming page enables the tracing parameters, and defines the way for requesting such information to the operator. TRACING parameters are additional runtime data that the operator can/has to input; these data are saved and linked with the measurements acquired. Up to ten parameters can be enabled and for each one must be defined if the operator is forced to input a value (MANDATORY) or can skip it (OPTIONAL). The values can be input on operator request or at the end of a measure sequence (after the last step).
To insert the TRACING DATA it is necessary that one BATCH is activated.
Define the number of measurement steps by tapping STEP.

- 30 -
3.2.3 Step definitionTap on DESCRIPTION to insert a STEP description.
The configuration parameters are described below.• DESCRIPTION: DESCRIPTION of the measurement STEP.• MESSAGE: measurement STEP MESSAGE; this message appears in the page hea-
der highlighted in yellow, and it can be used to provide assistance to the ope-rator.
• X/R SUBGROUP SIZE: this parameter defines the size of the subgroup used in the control charts (permitted values: 2 to 15).
• INITIAL DELAY: initial measurement delay setting (in sec.).• ACQUISITION TIME: data acquisition period (in sec.).• MOTOR MANAGEMENT: Enables a signal that can be used to control a motor
used to rotate the piece while the measurement is being performed; it can only be used in I/O layouts (10-13).

- 31 -
3.2.4 Defining the characteristic
This tab is used to enter the basic CHARACTERISTIC data, i.e. name, FORMULA and tole-rance limits.
Tap on CHARACTERISTIC to access the form used to define the CHA-RACTERISTIC.
3.2.4.1 Miscellaneous TAB
• NAME: to enter the FORMULA name• DESCRIPTION: full description of the characteristic.• MEASURE UNIT: measurement unit used for the CHARACTERISTIC; the number of
places, displayed after the decimal point, depends on the value set up in the PRECISION field.• MM: millimetre• IN: inch• DEG: degrees and hundredths• G: gram• °C: degrees Celsius• °F: degrees Fahrenheit• °: sexagesimal degrees; when the precision is set to x0.01 the value is displa-
yed in degrees and minutes, e.g. 6°11’ ; when the precision is set to x0.0001 the value is displayed in degrees, minutes and seconds, e.g. 6°11’25”.
• μM: micron

- 32 -
• FORMULA: The FORMULA may include TRANSDUCERS, mathematical functions or previously acquired measurements, up to a maximum of 60 characters. Tap the “T” button to select the transducer list. Tap a line to add the correspon-ding TRANSDUCER to the FORMULA. Tap the “M” button to select the CHARACTE-RISTIC list. Tap a line to ADD the corresponding CHARACTERISTIC to the FORMULA.
• ABSOLUTE MEASURE: it defines whether the measurement detected in the FOR-MULA is absolute, or not. If so, the system subtracts the NOMINAL VALUE from the processed value, whereas in the second case it adds the two values together.
• AUXILIARY: very often applications use intermediate Characteristics to elaborate another CHARACTERISTIC. These “auxiliary characteristics” are not involved in the part status evaluation, not stored in the batch and it is possible to exclude them from the display too. It is possible to configure the measuring steps with auxi-liary characteristics only (visible or not visible); the only limitation is that a PART PROGRAM must contain at least one not-auxiliary CHARACTERISTIC (ok/ng).
• X/R TYPE: it can be used to enable or disable the X/R control chart.• TOLERANCE LIMITS: to set up the tolerance limit type and the corresponding
values based on the part technical specifications, it is possible to enable the prescrap (or “yellow”) limits by using the TREND “+” and “-“ parameters. The PRECISION parameter defines the number of decimal figures to be used for the CHARACTERISTIC.

- 33 -
3.2.4.2 Using the formulaTap on fx to access the keyboard with the list of complex functions.
The following mathematical and trigonometric functions are available:• SIN(): sine function• COS(): cosine function• TAN(): tangent function• ASIN(): arcsine function• ACOS(): arccosine function• ATAN(): arctangent function• CTAN(): cotangent function• PI: high resolution pi function• SQRT(): square root function• ABS(): absolute value function• POW(X,Y): power function where x is the base and y the exponent
- 34 -
The following functions for determining the minimum and maximum values between operands are available (TRANSDUCERS and/or CHARACTERISTICS and/or constants):• MIN: function for determining the minimum value among N operands; e.g. Min
(T1,T2,T3).• MAX: function for determining the maximum value among N operands; e.g.
Max (M1,M4).Up to 10 comma separated values are permitted.
The following dynamic calculation functions are available for use on all the values acquired during the measurement:• DMAX: dynamic maximum function• DMIN: dynamic minimum function• DAVE: dynamic mean function for all the acquired values• DRNG: dynamic range function (maximum - minimum).These functions may be applied to individual transducers or measurements.
The following simulation functions are available:• RND: function that generates random values.• NRND: random function values with normal distribution.• GRND: random function values with Gamma distribution; select the (>0) para-
meter to obtain exponential distributions (=1) that resemble more closely the classic “bell curve” the more they increase.
The following manual input functions are available:• IN: the operator can manually input a measurement for the CHARACTERISTIC.
The following logic functions are available:• MMODE(): returns 1 during the measurement phase and 0 during the zeroing
phase.• ZMODE(): returns 1 during the zeroing phase and 0 during the measurement
phase.
NOTE: The Merlin can carry out manual dynamic acquisitions. The perfor-mances may change according to the number of the used channels.

- 35 -
3.2.4.3 Zeroing parameters TABTap on ZEROING PARAMETERS to assign a MASTER SET (previously configured) to the CHA-RACTERISTIC.
3.2.4.4 Classification TABOnce enabled in SETTINGS - GLOBAL SETUP - MISCELLANEOUS 1, the CLASS MANAGEMENT function allows to create up to 32 classes for each CHARACTERISTIC.
- 36 -
Here is the list of parameters to program :• CLASS DEFINITION:
• DISABLED: (Default)• UNIFORM & FIXED: the system sets the classes programmed; only the class
name is left editable. All CLASSES are created with the same size.• FREELY EDITABLE: name and value are freely editable. The CLASSES can have
different sizes.• CLASSES IN TOLERANCE & OUT OF TOLERANCES: the total amount of classes must
be 32, and they can be inside or outside the tolerance limits.
Edit function allows to modify NAME and/or VALUE in the table.
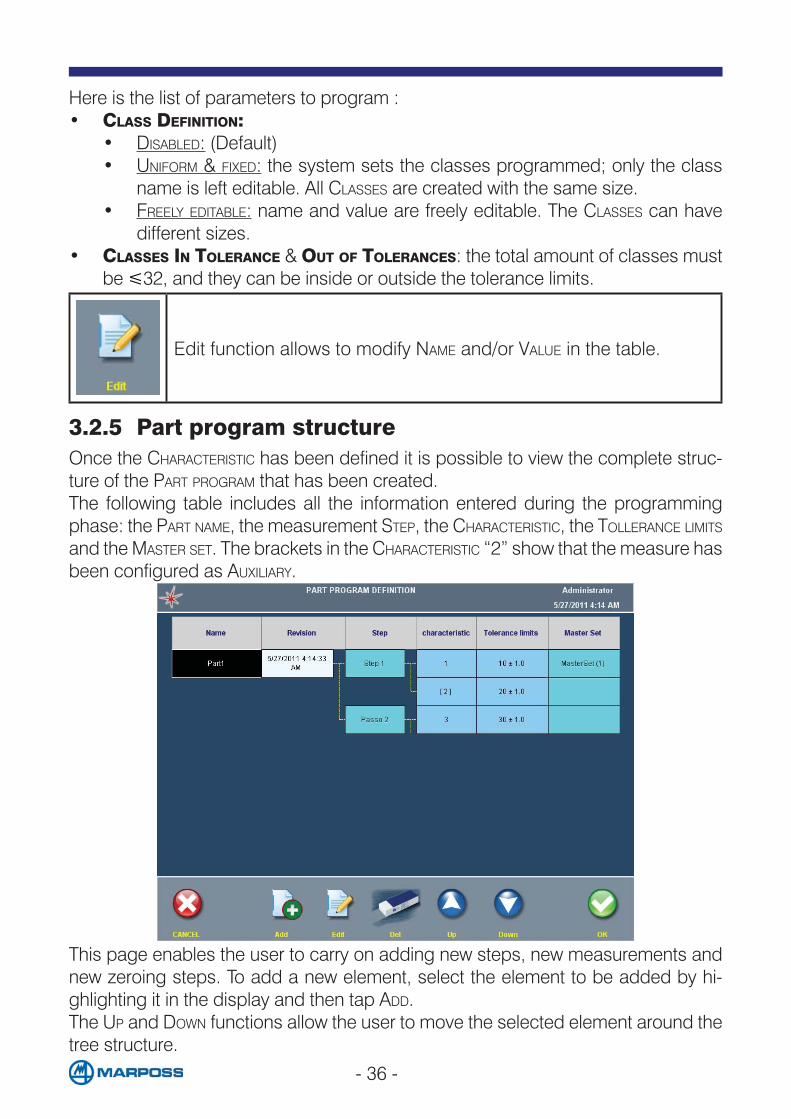
3.2.5 Part program structureOnce the CHARACTERISTIC has been defined it is possible to view the complete struc-ture of the PART PROGRAM that has been created.The following table includes all the information entered during the programming phase: the PART NAME, the measurement STEP, the CHARACTERISTIC, the TOLLERANCE LIMITS and the MASTER SET. The brackets in the CHARACTERISTIC “2” show that the measure has been configured as AUXILIARY.
This page enables the user to carry on adding new steps, new measurements and new zeroing steps. To add a new element, select the element to be added by hi-ghlighting it in the display and then tap ADD.The UP and DOWN functions allow the user to move the selected element around the tree structure.

- 37 -
4 BATCHES
BATCH CREATION: to create a new BATCH (see paragraph 4.1).
EDIT BATCH: to modify the parameters of the selected BATCH.
CLOSE BATCH: to enable the operator to close an active BATCH, i.e. setting it to a state where it is not possible to add measurements and in which it can be deleted.
BATCH CHANGE: fast change of the selected BATCH; it enables the operator to close the BATCH quickly, while simultaneously opening a new one having the same parameters.
ALL BATCHES: to enable the operator to view all active and closed BATCHES.
MEASURE: to enable the operator to activate the measurement phase for the selected Batch (see chapter 5).
This menu contains the commands that are used to manage the BATCHES, i.e. the data structures used for collecting the measurements. The BATCHES are used primarily to store the data, but also to arrange the measurements in layers according to the time they were collected in order to increase the significance of the statistical analysis and to correlate the data collection with the production BATCHES. Merlin can handle up to 200 BATCHES.
The following commands are available:

- 38 -
The ALL BATCHES function can be used to view all active and closed batches and generate an alternative command list that enables the operator to work on closed BATCHES, exporting and deleting them:
FILE TRANSFER: to enable the operator to transfer the exported BATCHES to a specific destination defined in the General setup (see chapter 6).
EXPORT: to export the selected BATCH to a file; the operator may de-cide to export only the measurements, only the statistics, or the measurements and the statistics.
ACTIVATE BATCH: to activate the selected BATCH.
EDIT BATCH: to modify the parameters of the selected BATCH.
DELETE: to delete the selected BATCH, it is possible only if it is already closed.
ACTIVE BATCHES: to enable the operator to view the active BATCHES only.
There are two ways to create a new BATCH:• Tap on BATCHES MENU and than on BATCHES CREATION to create a new BATCH
• Select PART PROGRAM from the PROGRAMS MENU, access the PART PROGRAMS LIST page and select the PART PROGRAM, the BATCH is to be associated with, then tap on BATCH.

- 39 -
4.1 Miscellaneous TAB
NOTE: The SERIAL NUMBER BEHAVIOUR and SERIAL NUMBER PREFIX parameters may be viewed in the Tab only if at least one traceability key has been set up.
• NAME: field to define a production BATCH name. • STATISTICAL STUDY: to indicate if a statistical study on the data is required and
select the type.• NONE: Only the part counters are saved in the batch. • PROCESS: Each individual acquisition is stored.
• I/O INDEX (DEC/HEX): The I/O index function allows to automatically switch BATCH, and relevant part program associated, through a digital input sent by an external logic (PLC) or manually by a push button/rotary switch. The I/O reference number of each batch can be entered either in decimal (Dec), or in a hexadecimal form (Hex).
• SERIAL NUMBER BEHAVIOUR: • STANDARD: the operator may enter the serial number normally via the
keyboard by managing the keys. • AUTOINCREMENTAL: the serial number corresponds to the measurement
number, it is formed by 5 figures (e.g. 00001, 00002, etc.) and it is incremented automatically each time a measurement is carried out.
• SERIAL NUMBER PREFIX: if the previous field is set to “AUTOINCREMENT” it is possible to define an alphanumerical prefix; for example, if the letter “A” is inserted in this field, the serial number becomes A-00001, A-00002 etc.
NOTE: The BATCH name may not contain characters that Window does not accept as part of file names (E.g. / \ : * ? “<>| ø...). If any of these characters is used, the system will allocate the PART PROGRAM a string containing the exportation date and time (YYYYMMDDhhmmss) during the BATCH export phase.

- 40 -
• SELECTION CHANNEL: use this parameter to select the TRANSDUCER that triggers the change. Each transducer may only be used to select a single BATCH; a mes-sage appears next to the TRANSDUCER name, indicating whether it is free or alre-ady used for another selection.
• THRESHOLD ±: TRANSDUCER measurement field thresholds that are used to ena-ble the selection.
• SELECTION CONDITION: this parameter defines the condition at which the selec-tion is enabled: either as the value moves into (FROM OUT TO IN), or out of (FROM IN TO OUT) the range defined by the thresholds.
• AUTOMATIC DATA EXPORT: the function allows choosing which data has to be exported on batch closing, the options are:• NO: no automatic export.• ONLY MEASURES: the software generates a file containing all the batch mea-
surement values and export it to the preselected path (see paragraph 6.6).• ONLY STATISTICS: the system creates and exports a file (.csv Microsoft Excel®
compatible format, .DFQ Q-Das compatible format) containing the statisti-cal data from the most significant.
• MEASURES AND STATISTICS: the software creates and exports both types of file: measurements in the programmed format and statistics in the Excel® compatible text format and .DFQ Q-Das compatible format.
• AUTOMATIC DELETION: if this parameter is set to YES, the system deletes the BATCH closed.
• AUTOMATIC CHANGE: when it is enabled the software creates a new BATCH au-tomatically after closing the current one. The new file will inherit the current settings, but with a different name. The system creates the name as follows: YYYMMDDhhmmss. The AUTOMATIC CHANGE function works only when the batch is closed inside the measure environment, with some automatic mechanism, like the BATCH DURATION, it does not work closing the batch manually by the menu.
The user can select the batch manually from the list or through I/O signal, in the latter case the selection numbering system in the I/O INDEX parameter is used.
The software is also able to select the BATCH automatically by exploiting a transducer generated event. The following parameters must be programmed in order to define the automatic batch change event:
In the “ACTIONS ON BATCH CLOSING” panel it is possible to select the operation to be performed when closing a batch, as described below (these parameters may be preset using the ACTIONS ON BATCH CLOSING menu, see para. 6.7).

- 41 -
4.2 Duration TAB
4.3 Tracing data request TAB
In the BATCH DURATION window it is possible to choose between various conditions under which the BATCH closes automatically.
In the TRACING DATA REQUEST window the user has to insert the initial value only for K-field parameters having BEHAVIOUR set on STATE (input data valid until the next mo-dification).
• MAX. NUMBER OF PARTS: the BATCH is automatically closed at the completion of the number of parts.
• MAX DURATION (HOURS / MINUTES): in this case the BATCH is closed when a span of hours/minutes is elapsed.
• ACTION ON CHANGING SHIFT(NONE/ENABLE): this function can be used to close the batch automatically at the end of each shift defined in the GLOBAL SETUP --> SHIFTS menu (see para. 6.3). This function works for all active batches and not just the current one.

- 42 -
5 MEASUREMENT PAGE
Tap MEASURE to access the MAIN MEASURE PAGE. This page allows the user to view the measurements acquired by the device connected to the Merlin in real time.
Up to 16 measurements can be displayed simultaneously, if there are more than 8 measurements they are arranged in two columns.
Tap the START button to start a measurement sequence. If more than one measurement step was set up during the programming phase, tap the same button to proceed step-by-step.
Tap the HISTOGRAM button to modify the display by activating the hi-stogram.
The DELETE function enables the user to delete the last acquisition. If this button is tapped during a stepped acquisition, the operator can decide whether to delete the last step only or all the preceding ones, (limited to the steps associated with the last part).

- 43 -
Tap the TRACING button to insert the TRACING DATA.
Tap on ZEROING to carry out the device electrical zeroing procedure.
Tap on PROGRAMMING to access the current PART PROGRAM programming phase (see para. 3.2.5). Tap on the CHARACTERISTIC identification number (yellow or grey) to access the programming phase for the corresponding CHARACTERISTIC directly. The modifications have an immediate effect on the measurement process
1. Name of active BATCH
2. PART PROGRAM name3. STEP name (STEP 1 of 2) 4. Last SERIAL NUMBER inserted if it is programmed in the TRACING DATA page5. GOOD: Number of GOOD parts / percentage of GOOD parts6. SCRAPT: Number of SCRAPT parts / percentage of SCRAPT parts7. TREND: Number of TREND parts / percentage of TREND parts8. Total number of measured parts
1 2 3 4
5 6 7 8
- 44 -
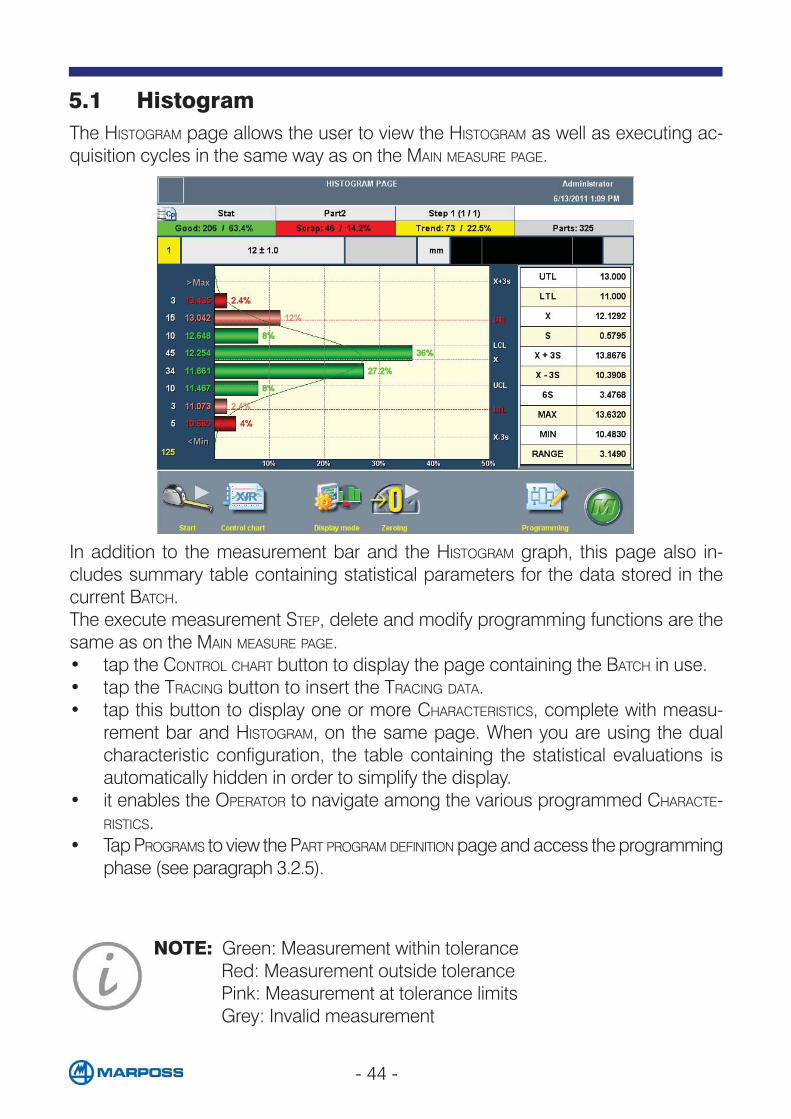
5.1 HistogramThe HISTOGRAM page allows the user to view the HISTOGRAM as well as executing ac-quisition cycles in the same way as on the MAIN MEASURE PAGE.
In addition to the measurement bar and the HISTOGRAM graph, this page also in-cludes summary table containing statistical parameters for the data stored in the current BATCH.The execute measurement STEP, delete and modify programming functions are the same as on the MAIN MEASURE PAGE.• tap the CONTROL CHART button to display the page containing the BATCH in use.• tap the TRACING button to insert the TRACING DATA.• tap this button to display one or more CHARACTERISTICS, complete with measu-
rement bar and HISTOGRAM, on the same page. When you are using the dual characteristic configuration, the table containing the statistical evaluations is automatically hidden in order to simplify the display.
• it enables the OPERATOR to navigate among the various programmed CHARACTE-RISTICS.
• Tap PROGRAMS to view the PART PROGRAM DEFINITION page and access the programming phase (see paragraph 3.2.5).
NOTE: Green: Measurement within tolerance Red: Measurement outside tolerance Pink: Measurement at tolerance limits Grey: Invalid measurement

- 45 -
5.2 Control chartUse the CONTROL CHART page to view the graph and carried out acquisition cycles.
The adjacent table contains the numerical statistical results corresponding to the CONTROL CHART. The executed measurement STEP, delete and modify PROGRAMMING functions are the same as on the MAIN MEASURE PAGE.• SUBGROUP: tapping on any points of the chart, it is possible to get more informa-
tion on the subgroup represented. Information like samples value and alarms are shown on the table available on the right side of the screen.
• SINGLE VALUE CHART: tap this button to display the page containing the SINGLE VALUE CHART for the BATCH in use.
• TRACING: tap the TRACING button to insert the TRACING DATA.• DISPLAY MODE: tap this button to change the displayed charts from X/R to X/S.• CONTROL LIMITS: tap this button in order to modify the chart control limits.• ZEROING: tap on ZEROING to carry out the device electrical zeroing procedure.

- 46 -
By means of the statistic alarms management the system notifies if there are unu-sual patterns or trends in CONTROL CHARTS, which could be evidence of wrong beha-viour during the production.
The alarms refer to:• Exceeding of CONTROL LIMITS
• RUNNING ALARM on XR/S chart (i.e. seven points in a row on one side of the middle line between CONTROL LIMITS)
• TREND ALARM on XR/S chart (i.e. seven points in a row that are consistently incre-asing or decreasing)
• MIDDLE THIRD ALARM on XR/S chart (i.e. normal distributions have generally about 2/3 of the points within the middle third of the region between the CONTROL LIMITS and about 1/3 will be in the outer two/thirds of that region, if this does not hap-pen there could be a problem on CONTROL LIMITS values).

- 47 -
As soon as a subgroup causes an alarm condition, the CONTROL CHART is updated with red dots in correspondence of the subgroup in alarm condition.
5.2.1 Control limits pageThe control limits page may only be accessed when it is working with a batch and if the X/R control chart has been enabled.
This table displays the pre-set control limits (these limits are calculated automatically by the software depending on the programming that has been carried out, the tolerance limits, etc.), the calculated limits (the software updates these limits at regular intervals,

- 48 -
5.3 Single value chartThe SINGLE VALUE CHART PAGE displays information for each single acquisition. This can be easily done by pointing and tapping directly on the chart; the data are reported on a grid located underneath the chart itself. This chart must be enabled using the GLOBAL SETUP form, defining the number of measurements to be displayed (minimum 25, maximum 100).
If a Batch has been defined for data collection, the information displayed under the chart includes the first three TRACING DATA defined for the PART PROGRAM in use. The values of these data are entered by the TRACING DATA REQUEST window (see paragraph 4.3).
depending on the measurement results) and the current limits (the limits that are currently in use). The latter limits can be set-up manually by tapping on the corresponding field. To select the calculated limits as the current limits, simply tap on the field in the desired calculated limits column.

- 49 -
5.4 Tracing data request
In order to trace production, the operator may append additional information to the completed measurements by using the TRACING button; this button opens a request form that is split into two tabs: TRACING e EVENTS.
The first TAB contains all the data required for the current part-program, with the exception of the N.9 Event datum.The data defined with BEHAVIOUR = EVENT are highlighted in blue.

- 50 -
The EVENTS tab contains the list of possible values for the N.9 Event datum.
For both tabs, select the desired values and confirm by tapping the OK key.The following paragraphs provide a detailed description of how it works the Tra-cing key functions for the various measurement pages.
The TRACING button enables the operator to set up new tracing data and insert new events associated with the measurement in progress. A message also appears under the title of the TRACING DATA REQUEST form indicating whether the information that has been inserted is associated with a new measurement, or the last measu-rement to be completed.
NOTE: The EVENTS TAB is displayed only if the EVENT tracing datum has been enabled with at least two programmed parameters.

- 51 -
6 GLOBAL SETUP
6.1 Miscellaneous 1 TAB
Tap on the icon shown to access the GENERAL SETUP menu.
• MULTIPLE TRANSDUCER INSTANCE: ENABLED, DISABLED
• STARTUP USER: ADMINISTRATOR, OPERATOR
• AUTORUN AFTER BATCH AUTOSELECTION: if it is enabled, this option commands the measurement cycle to start after the BATCH is selected automatically by the transducer (options: YES, NO)
• CLASS MANAGEMENT: it enables the measurement classification (default: DISABLED).• PASSWORD (ADMINISTRATOR): to enter the numerical password for the administrator • PASSWORD (OPERATOR): to enter the numerical password for the operator user • I/O CONFIGURATION: to set the layout regarding to the I/O signal behaviour.

- 52 -
6.2 Miscellaneous 2 TAB
• OUTPUT PROTOCOL: it permits the operator to enable a communication protocol; upon completion of each measurement, the system transmits the acquired data by a serial, TCP or UDP port using the selected ASCII protocol. In the case of serial protocols, the output may use the Merlin Plus serial port or any port on an Easy Box U4S.
• PROTOCOL NAME: name of the protocol in use.• FREE RUNNING: This operation mode may be set to YES, so that it is enabled for any
PART PROGRAM or “USER DEFINED” pin in order to enable it for the individual PART PROGRAMS. The measurement is acquired continuously and registered in correspondence with the “DATO OK” command. In FREE RUNNING it is possible to change the active page, inserting traceability keys and deleting the current step. All the other functions are available after activating the “Pause” command.

- 53 -
This page can be used to setup a maximum of four working shifts so the system can perform the following functions when they expire:• automatic batch closing (see chapter 4.2)
6.3 Shifts TAB
- 54 -
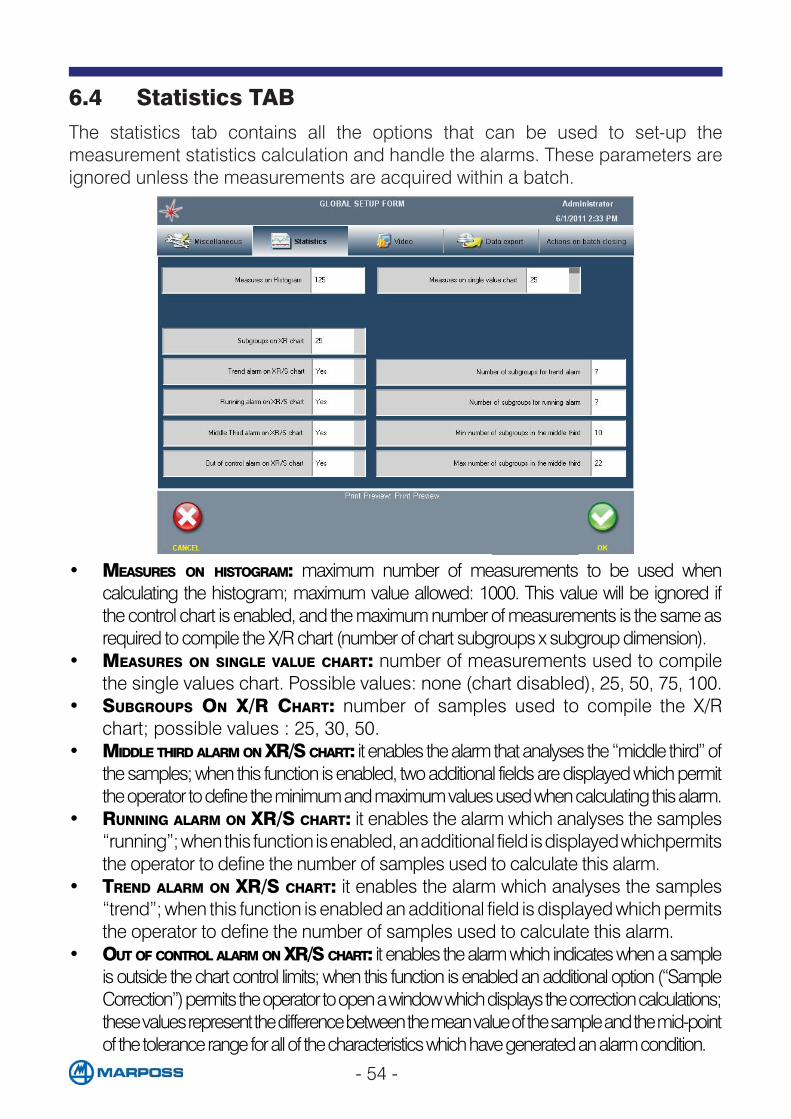
6.4 Statistics TAB
• MEASURES ON HISTOGRAM: maximum number of measurements to be used when calculating the histogram; maximum value allowed: 1000. This value will be ignored if the control chart is enabled, and the maximum number of measurements is the same as required to compile the X/R chart (number of chart subgroups x subgroup dimension).
• MEASURES ON SINGLE VALUE CHART: number of measurements used to compile the single values chart. Possible values: none (chart disabled), 25, 50, 75, 100.
• SUBGROUPS ON X/R CHART: number of samples used to compile the X/R chart; possible values : 25, 30, 50.
• MIDDLE THIRD ALARM ON XR/S CHART: it enables the alarm that analyses the “middle third” of the samples; when this function is enabled, two additional fields are displayed which permit the operator to define the minimum and maximum values used when calculating this alarm.
• RUNNING ALARM ON XR/S CHART: it enables the alarm which analyses the samples “running”; when this function is enabled, an additional field is displayed whichpermits the operator to define the number of samples used to calculate this alarm.
• TREND ALARM ON XR/S CHART: it enables the alarm which analyses the samples “trend”; when this function is enabled an additional field is displayed which permits the operator to define the number of samples used to calculate this alarm.
• OUT OF CONTROL ALARM ON XR/S CHART: it enables the alarm which indicates when a sample is outside the chart control limits; when this function is enabled an additional option (“Sample Correction”) permits the operator to open a window which displays the correction calculations; these values represent the difference between the mean value of the sample and the mid-point of the tolerance range for all of the characteristics which have generated an alarm condition.
The statistics tab contains all the options that can be used to set-up the measurement statistics calculation and handle the alarms. These parameters are ignored unless the measurements are acquired within a batch.

- 55 -
6.5 Video TAB
• BARGRAPH BACKGROUND: BLACK, COLOURED.• BARGRAPH INDICATOR: BAR, CURSOR.• ABSOLUTE/DISPLACEMENT MEASUREMENT DISPLAY MODE: The measurement is
displayed as an ABSOLUTE value or DISPLACEMENT with respect to the centre of the tolerance range.
• MEASUREMENT PAGE TYPE (ONLY STANDARD PAGES/ALL PAGES): if the ALL PAGES option is selected the system also displays the “led bars” page in vertical bars format.
• SUMMARY PAGE: YES, NO
- 56 -
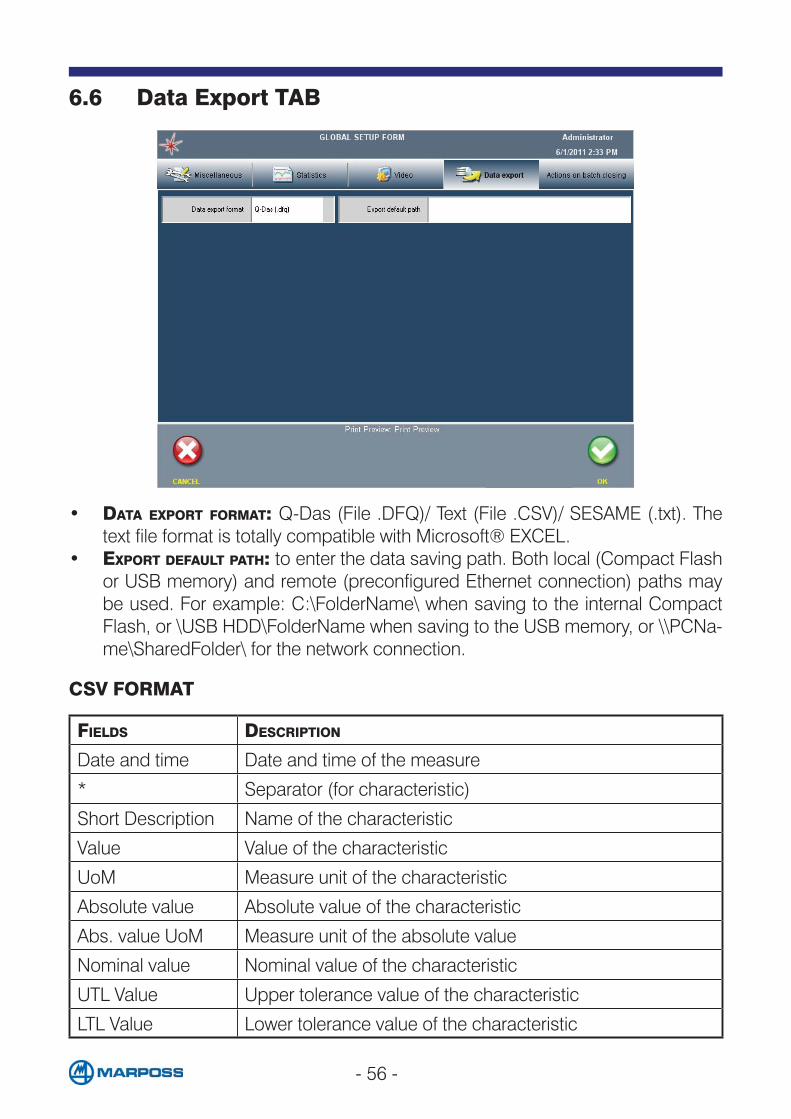
6.6 Data Export TAB
• DATA EXPORT FORMAT: Q-Das (File .DFQ)/ Text (File .CSV)/ SESAME (.txt). The text file format is totally compatible with Microsoft® EXCEL.
• EXPORT DEFAULT PATH: to enter the data saving path. Both local (Compact Flash or USB memory) and remote (preconfigured Ethernet connection) paths may be used. For example: C:\FolderName\ when saving to the internal Compact Flash, or \USB HDD\FolderName when saving to the USB memory, or \\PCNa-me\SharedFolder\ for the network connection.
CSV FORMAT
FIELDS DESCRIPTION
Date and time Date and time of the measure
* Separator (for characteristic)
Short Description Name of the characteristic
Value Value of the characteristic
UoM Measure unit of the characteristic
Absolute value Absolute value of the characteristic
Abs. value UoM Measure unit of the absolute value
Nominal value Nominal value of the characteristic
UTL Value Upper tolerance value of the characteristic
LTL Value Lower tolerance value of the characteristic

- 57 -
6.7 Actions on batch closing TAB
• AUTOMATIC DATA EXPORT: NO, MEASUREMENT ONLY, STATISTICS ONLY, MEASUREMENTS AND STATISTICS.
• AUTOMATIC DELETION: YES, NO.• AUTOMATIC CHANGE: YES, NO
NOTE: To export any data it is necessary create a batch.
NOTA: The measurement data export is possible either when a batch is complete but also after each piece (for this function please refer to the page of part program definition).

- 58 -
7 PROTOCOLS
The “Serial Inputs” column displays the number of parameters handled by the protocol and therefore the number of inputs which will be made available by cre-ating a device which uses that protocol. The system is now capable of acquiring measurement information from the following external devices/protocols.
MARPOSS• Quick Digit Simplex • Quick Digit Duplex• E4N single column (configurations with daisy-chained columns are not allowed)• Quick Read (up to four daisy-chained units)MG• CS2-LinearTESA
• Micro-Hite • Tesa Bi-directionalMAHR
• M1 Perthometer • MILLITAST 1083/1085 • Marcator DuplexBOWERS• HolematicTAYLOR HOBSON• Surtronic 25 (manual) • Surtronic 25 (automatic)MITUTOYO• SJ-201P roughness • SJ-210 roughnessBOBE• HF-MS-M systems on devices for 4 and 8 channels

- 59 -
7.1 Personal Protocols
• MANUFACTURER: manufacturer’s name.• NAME: name allocated to the protocol.• BAUDRATE: communication speed expressed in bits per second (options: B300,
B600, B1200, B2400, B4800, B9600, B14400, B19200, B38400, B57600, B115200).• PARITY: protocol parity (options: NONE, ODD, EVEN, MARK, SPACE).• STOP BITS: NONE, ONE, ONE POINT FIVE, TWO.• DATA BITS: 5,6,7,8.• HANDSHAKE: NONE, XON/XOFF, RTS, RTS XON/XOFF.• PORT BEHAVIOUR: NORMALLY CLOSED, ALWAYS OPEN.• POWER SUPPLY ON RTS/DTR: if the box is ticked, the Merlin provides power
supply between RTS (-) and DTR (+) pins. A typical device that requires this feature is the Mahr Millitast 1085.
The COPY function enables the user to create a new PERSONAL PROTOCOL starting from an existing one .
NOTE: in order to access the information about the inputs handled by a given protocol, select it from the list, tap “Copy” and view the inputs in the “Serial Inputs” tab”. Tap “Exit” to quit.
NOTE: we cannot guarantee the complete compatibility of the protocols developed, to comunicate with these devices, due the continuous deve-lopement performed by the manufactures of them. On demand we can develop the protocol for a new serial device only if it is provided to us. Please contact us for any other detail.
- 60 -
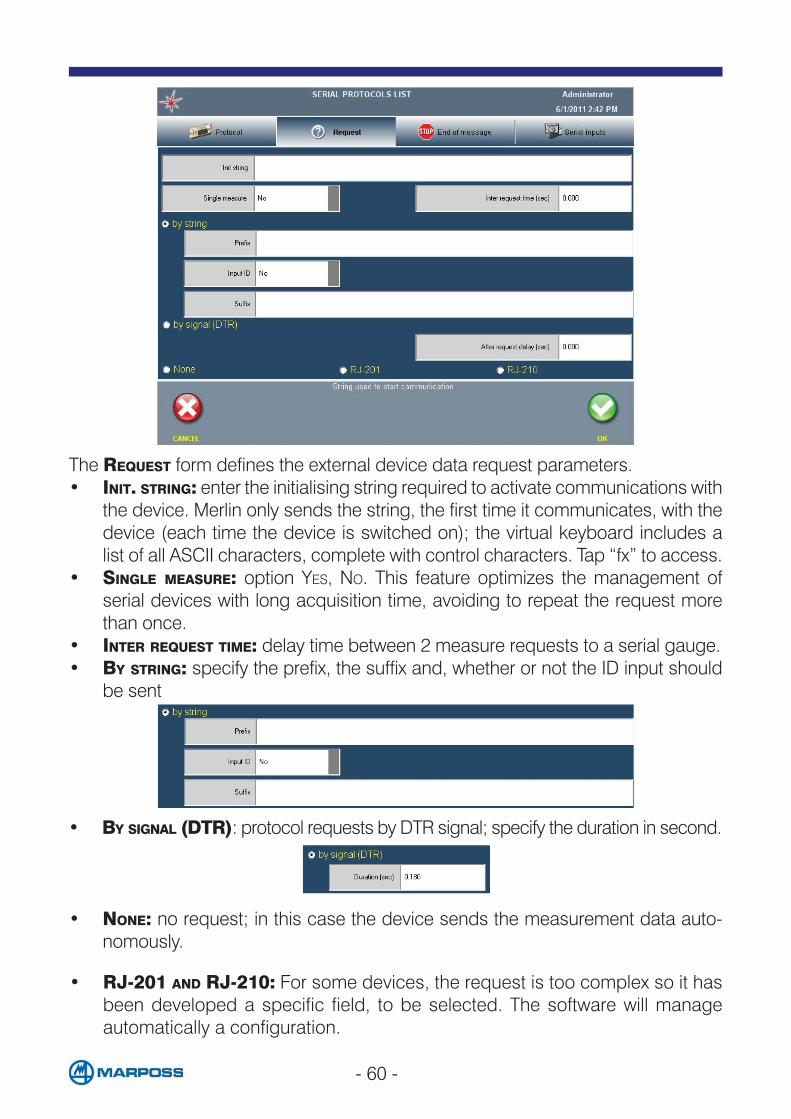
The REQUEST form defines the external device data request parameters.• INIT. STRING: enter the initialising string required to activate communications with
the device. Merlin only sends the string, the first time it communicates, with the device (each time the device is switched on); the virtual keyboard includes a list of all ASCII characters, complete with control characters. Tap “fx” to access.
• SINGLE MEASURE: option YES, NO. This feature optimizes the management of serial devices with long acquisition time, avoiding to repeat the request more than once.
• INTER REQUEST TIME: delay time between 2 measure requests to a serial gauge.• BY STRING: specify the prefix, the suffix and, whether or not the ID input should
be sent
• BY SIGNAL (DTR): protocol requests by DTR signal; specify the duration in second.
• NONE: no request; in this case the device sends the measurement data auto-nomously.
• RJ-201 AND RJ-210: For some devices, the request is too complex so it has been developed a specific field, to be selected. The software will manage automatically a configuration.
- 61 -
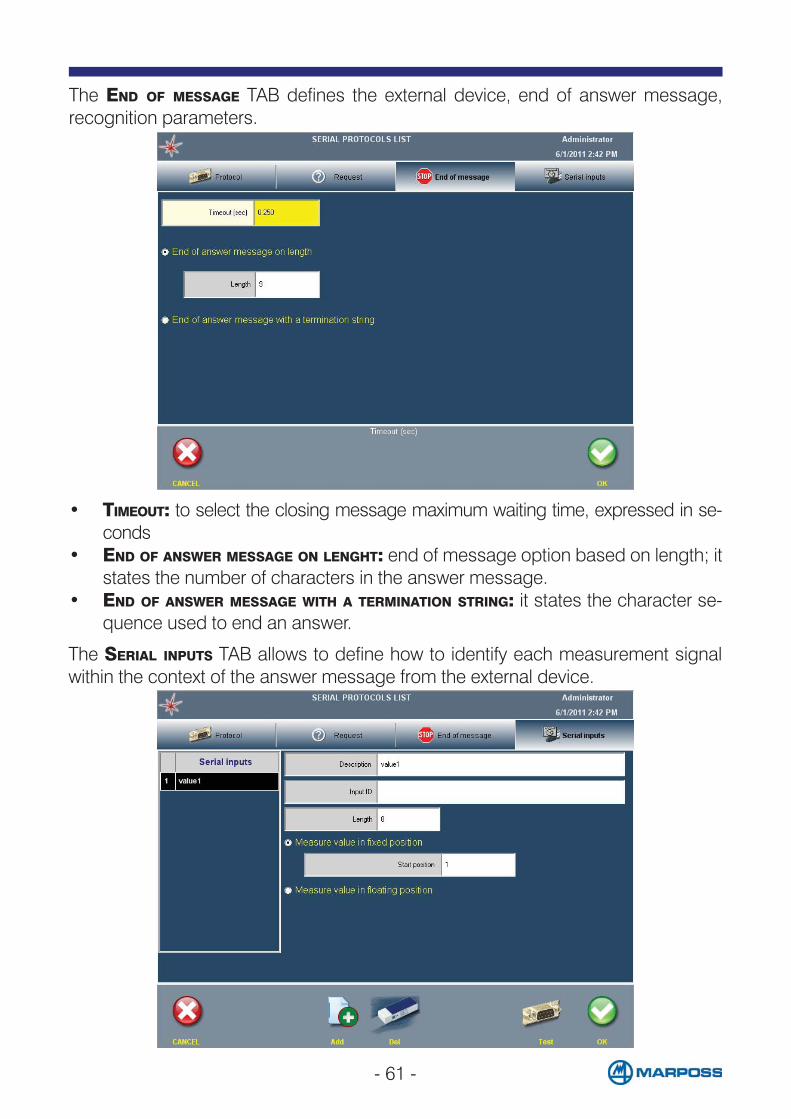
The SERIAL INPUTS TAB allows to define how to identify each measurement signal within the context of the answer message from the external device.
The END OF MESSAGE TAB defines the external device, end of answer message, recognition parameters.
• TIMEOUT: to select the closing message maximum waiting time, expressed in se-conds
• END OF ANSWER MESSAGE ON LENGHT: end of message option based on length; it states the number of characters in the answer message.
• END OF ANSWER MESSAGE WITH A TERMINATION STRING: it states the character se-quence used to end an answer.

- 62 -
By tapping the test button, Merlin sends a measure request to an external serial unit and reads the feedback from the device. This feature is especially useful to debug the protocol, in fact it is im-mediately clear if the request is sent in the proper way (if not, no answer from the serial device will be received).
7.2 Data output protocols
7.2.1 Optional handshaking
The software allows the operator to select which of the released protocols to use during the setting up phase, using the same method as used for the digital input/outputs management cycles. If a data output protocol has been setup, upon completion of each measurement, the Merlin software creates the message corresponding to the piece that has just been measured and sends it automatically (without the need for confirmation on the part of the operator).The protocols are managed on one of the available serial ports. In general, a message is made up of the following sections:• START: it contains the start communication characters • GLOBAL DATA: it contains the general information about the piece that has just been me-
asured.• CHARACTERISTICS DATA: it contains the information regarding the n characteristics that
transmission has been enabled for. This section consists of n sub-sections, one for each characteristic.
• CLOSING: it contains the checksum and the closing character.
It is possible to enable a simple handshaking mechanism for a protocol that can be used to monitor the connection to the remote partner and check whether it remains open. • If the message is received correctly, the remote unit returns the confirmation mes-
sage: <STX><ACK><ETX> (ASCII characters 2-6-3)• If the message is not received correctly, the remote unit either returns an error
message: <STX><NACK><ETX> (ASCII characters 2-21-3) or does not re-spond at all.
• After sending the message, Merlin software awaits the answer; there are three possible outcomes:1. positive response (ACK) -> message sent correctly2. no response within the time limit (TimeOut) -> connection interrupted 3. negative response -> Merlin sends the message again (until it reaches the preset maximum number of attempts) and awaits the response. No reply or persistent negative response -> connection interrupted
When the connection interrupted status is diagnosed, a video message is displayed indicating the type of error that has been detected.• After sending the message, the Merlin software proceeds with its activities, re-
gardless of the outcome.

- 63 -
The following is a description of the standard data output protocol on a serial port for the Merlin software, denominated DOP-STD01.
OUTPUT MESSAGE FORMATSTART
Name Characters Meaning
Start 1 Start message character: <STX>
2 <CR><LF>GLOBAL DATA
Name Characters Meaning
Date 8 Date test was performed in “DD/MM/YY” format
Hour 8 Time test was performed in “HH:MM:SS” format
Program 20 Name of part program used
Serial number 20Serial number or progressive number of piece within the active batch
Piece result 2Code that indicates the result of the measure-ment performed on the piece: G (good), T(trend), R(eject), NV(not valid)
Number of characteristics
2Number of characteristics sent (only non auxiliary characters are sent)
2 <CR><LF>CHARACTERISTIC DATA
The following information is sent for each characteristic
Name Characters Meaning
Name 3 Name of the characteristics.
Value 12
Absolute or relative measurement value, as di-splayed. The value is formatted according to the precision setup for the characteristic. The decimal separator is always represented by a point. The sign is always indicated.
Measurement unit
4 Measurement unit symbol, as displayed (μm, mm, °C…)
Result 3Code that indicates the result of the measurement perfor-med on the single characteristic: G,T+,T-,R+,R-,NV+,NV-
2 <CR><LF>
7.3 Standard protocol N°1 (DOP-STD01)

- 64 -
CLOSING
Name Characters Meaning
Checksum 3
Message checksum, defined as the low byte of the sum of the ASCII codes of all the characters in the message (apart from the stop message ETX cha-racter and the final <CR> <LF>)
Stop 1 Stop message character: <ETX>
2 <CR><LF>
EXAMPLE OF DATA OUTPUTIn the following example, the values of two measurements (OG1 and OG2) perfor-med on good piece number 11 using the Biella program are transferred:
<STX><CR><LF>10/01/0815:10:01biella______________11__________________G_2_<CR><LF>OG1+24.1234____μm__G__<CR><LF>OP1-12.123_____μm__G__<CR><LF>xxx<ETX><CR><LF>
Legend:<STX>: character ASCII 2<ETX>: character ASCII 3<LF>: character ASCII 10<CR>: character ASCII 13_ : ASCII space character 32xxx: it indicates the value calculated for the checksum
NOTE: The default parameters used by the standard protocols on Merlin are:Baudrate: 9600Bit: 8Parity: NoneStopBit: 1

- 65 -
The following is a description of the standard data output protocol on a serial port for the Merlin software, denominated DOP-STD02.
OUTPUT MESSAGE FORMAT
START
Name Characters Meaning
Start 1 Start message character: <STX>
2 <CR><LF>GLOBAL DATA
Name Characters Meaning
Date 8 Date test was performed in “DD/MM/YY” format
Hour 8 Time test was performed in “HH:MM:SS” format
Program 20 Name of part program used
Serial number 20Serial number or progressive number of piece within the active batch
Piece result 2Code that indicates the result of the measure-ment performed on the piece: G (good), T(trend), R(eject), NV(not valid)
Number of characteristics
2Number of characteristics sent (only non auxilia-ry characters are sent)
2 <CR><LF>CHARACTERISTIC DATA
The following information is sent for each characteristic
Name Characters Meaning
Name 3 Name of the characteristics.
Value 12
Absolute or relative measurement value, as di-splayed. The value is formatted according to the precision setup for the characteristic. The deci-mal separator is always represented by a point. The sign is always indicated.
Measurement unit
4Measurement unit symbol, as displayed (μm, mm, °C…)
Result 3Code that indicates the result of the measure-ment performed on the single characteristic: G,T+,T-,R+,R-,NV+,NV-
7.4 Standard protocol N°2 (DOP-STD02)

- 66 -
Class 5
Characteristic classification code, calculated on the basis of the measurement value, in ac-cordance with the table selected during the pro-gramming phase. If the classification code is not required for the characteristic a series of space characters is sent instead.
2 <CR><LF>CLOSING
Name Characters Meaning
Checksum 3
Message checksum, defined as the low byte of the sum of the ASCII codes of all the characters in the message (apart from the stop message ETX character and the final <CR> <LF>)
Stop 1 Stop message character: <ETX>
2 <CR><LF>
EXAMPLE OF DATA OUTPUT
In the following example, the values of two measurements (OG1 and OG2) perfor-med on good piece number 11 using the Biella program are transferred. The classi-fication for the first measurement value is 02 for the second it is 05:
<STX><CR><LF>10/01/0815:10:01biella______________11__________________G_2_<CR><LF>OG1+24.1234____μm__G__02___<CR><LF>OP1-12.123_____μm__G__05___<CR><LF>xxx<ETX><CR><LF>
Legend<STX> : character ASCII 2<ETX> : character ASCII 3<LF> : character ASCII 10<CR> : character ASCII 13_ : ASCII space character 32xxx: it indicates the value calculated for the checksum
NOTE: the only difference between protocol DOP-STD01 and protocol DOP-STD02 is that the latter also includes the characteristic class code

- 67 -
7.5 Protocol implementation method
The standard protocols, denominated DOP_STDxx, where xx is the id assigned to the protocol, are distributed with the Merlin software installation packages. The type of protocol to be used is selected in the MISCELLANEOUS 2 TAB on the GENERAL SETUP page, using the following fields:• OUTPUT PROTOCOL: where it is possible to activate the data output protocol• PROTOCOL NAME: protocol name For example, to activate protocol N.3 on TCP/IP:

- 68 -
8 TRACING DATAThis phase is used to define the data that can be used to trace the production by tapping the TRACING during the measurement phase.
8.1 Pre-defined data
The following table contains a list of pre-defined data, in text form if their value is free or Catalog form if their value has to be selected from a pre-defined list (the Catalog corresponding to the specific datum). Catalog type data must contain at least one value before they can be used.
N° TRACING DATA
PARAMETER CORRESPONDING
Q-DASK-FIELD
DEFAULT SETTINGS
TYPE BEHAVIOUR
1 SERIAL NUMBER K 0006 TEXT EVENT
2 CAVITY K 0007 CATALOG* STATE
3 GAGE K 0012 CATALOG* STATE
4 MACHINE K 0010 CATALOG* STATE
5 OPERATOR K 0008 CATALOG* STATE
6 PART IDENT. K 0009 TEXT EVENT
7 REASON OF TEST K 0015 CATALOG* STATE
8 ORDER K 0053 TEXT STATE
9 EVENT K 0005 CATALOG* EVENT
10 CUSTOM TEXT K 0009 TEXT EVENT
11PRODUCTION
NUMBERK 0016 TEXT STATE
12WORK PIECE
FIXTUREK 0017 TEXT STATE
During the measurement phase, the tracing information request is split into 2 tabs: the N.9 Event datum is used automatically for the events tab, whereas all the other data are used for the tracing tab.
NOTE: The Q-DAS catalogue may only contain the keys that are listed in the above table, if it is necessary to use Q-Das keys that are not included in the table, please contact the nearest Marposs office.

- 69 -
Add a new datum or modify an existing one (using the EDIT command) to access the following form.
8.2 Customising the data
The list of data can be expanded by using the ADD command. It is possible to import files from the Catalog using the IMPORT command. The file import must be done through a USB memory stick, the Merlin software will look for the “Kataloge.dfd” file in the USB memory root.

- 70 -
• DESCRIPTION: description that identifies the datum.• TYPE: the data may be in TEXT form if their value is free or CATALOG form if their
value has to be selected from a pre-defined list (the CATALOG corresponding to the specific datum). It’s possible to input a list of values among which the ope-rator has to choose, using the table on the right side of the form and commands ADD , DEL end EDIT. BEHAVIOUR: it defines how the data marks the measurements:• STATE: if a certain data value is inserted, all the measurements will assume
that value until it is modified again.• EVENT: if a certain data value is inserted, it will be valid for the current mea-
surement only.
NOTE: It is not possible to enter the tracing data unless a batch is active.
NOTE: in case of catalog form, it is possible to insert a list of values, shown to the operator by the concerning field. By ADD, CANC and MODIFY is possible values compounded by the following fields:• ID: numeric code used as unique identificator during data expor-
tation. This code is automatically suggested by the software during the creation but it could be customized in a way to assure an unique identification in case of many Merlin are used in the same plant and/or company.
• CODE and DESCRIPTION: alphanumeric fields are shown stages of in-serting and selecting keys.

- 71 -
Q-DAS EXPORTATION
K-Field Parameter connected
K00005 Events
K00006 SerialNum
K00007 CavityNum
K00008 OperatorName
K00010 MachineNum
K00011 Process Parameter
K00012 GageNum
K00014 PartIdent
K00015 TestReason
K00053 Order
K00100Number of characte-
ristics
K01001 Code number
K01002 Description of code
K01041 Drawing number
K01053 Batch number
K02001Name of characteristic
(mandatory)
K02002Description of cha-
racteristic(mandatory)
K02004Type of characteristic
(variable)
K02022 Number of decimals
K02101 Nominal value
K02110 Lower limit
K02111 Upper limit
K02120 N. Char + Limit Type
K02121 N. Char + Limit Type
K02130 Lower plausibility limit
K02131 Upper plausibility limit
K02141Measurement unit
index
K02142Description of measu-
rement unit
K02404Measurement system resolution (characteri-
stic accuracy)
K04060 Machine Num
K04070 Gage
K04090 Operator name
K04220 Events
K04240 Process parameter
K04250 Cavity
K08010Description of control chart type (location)
K08110Description of control chart type (variation)
K08500
Sample size (the size is stored in the group that this characteristic
belongs to)

- 72 -
9 MERLIN DIGITAL SIGNALS MANAGEMENT In order to minimize the programming performed by the user, the Merlin software manages digital signals (Input and Output) using precompiled lists of signals. The operator has only to choose the I/O layout according to his needs.For more detailed information on the I/O Layout management, please contact the nearest Marposs office.
SIGNAL LIST
LINE MEANING AND MANAGEMENT
IN
START/STOP TYPE1: the same line is used to give both commands. On rising edge the START, on falling edge the stop. This configuration is available (and cannot be changed) in all the footswitch connected to Easy Box.
IN
START/STOP TYPE2: the same line is used to give both commands. START and STOP commands are active on rising edge, it means that two pushes on the button are necessary to complete an acquisition. This configuration is available (and cannot be changed) for all the M1 Wave pushbuttons.
IN START TYPE3: START command active on rising edge.
IN STOP TYPE3: STOP command active on rising edge.
IN
ZERO MODE: when the input is high and it’s programmed at least one ze-roing step, Merlin software shows the zeroing page. When the signal is low the system shows the standard measuring page. This configuration is available for: Easy Box U8IO, DigiCrown, GageBox.
IN
NEXT ZERO STEP: active on rising edge. Merlin software skips to next ze-roing step. The system must be in ZEROING mode and more than one ze-roing step has to be available. This configuration is available for: Easy Box U8IO, DigiCrown, Gage Box.
IN
BATCH SELECTION: active on high level. When activated the software changes BATCH (and as consequence could change PART PROGRAM too) according to the binary code set on “Batch Code” signals (see next point). If the addressed batch is not valid, the system remains on the current one and “Error status” output signal is enabled.

- 73 -
IN (3BIT)
BATCH CODE: binary code which identifies the active BATCH to use to store acquired measures. The addressed BATCH is activated once BATCH SELECTION signal is high, or if BATCH SELECTION is not available, as soon as a bit changes in the code.It’s up to 4 bit binary code with a shift of one unit, this means that addressed BATCHES are:0000 → BATCH with I/O index 10001 → BATCH with I/O index 20010 → BATCH with I/O index 3…1110 → BATCH with I/O index 151111 → BATCH with I/O index 16
INDISABLE STATISTIC: Disable temporarily the internal data storage and counters. The status of this signal is checked just after the end of measu-rement during the first step and the status is frozen till the end of last STEP.
INREDO STEP: Active on rising edge. The signal deletes the measure ac-quired in last performed step allowing to repeat it. The function can be used more times until the complete deletion of current part.
IN
BATCH N: Direct BATCH selection, for each signal which goes high a batch is activated. If the addressed BATCH is not valid (i.e. two signals for direct selection active at the same time), the system remains on the current one and “Error status” output signal is enabled.
OUTREADY TO START: The signal indicates that Merlin is available to receive measu-ring or zeroing commands. This output is available for: Easy Box U8IO.
OUTPIECE GOOD: the signal indicates that last gauged part is GOOD. This output is available for: Easy Box U8IO.
OUTPIECE REJECT: signal indicates that last gauged part is SCRAP. This ou-tput is available for: Easy Box U8IO.
OUTPIECE TREND: signal indicates that last gauged part is in TREND range. This output is available for: Easy Box U8IO.
OUT
ERROR STATUS: signal indicates an error during batch selection (the ad-dressed BATCH is not available) or measure interrupted by error during the sensor acquisition (sensor broken, disconnected, …). The measu-rement is interrupted abnormally if one of the inputs is in over-range (programmed at sensor level) upon completion of the measurement.
OUT
ACQUISITION RUNNING: signal indicates that system is gauging. The si-gnal goes high following the START signal (beginning of measuring step) and goes down on the end of measuring step. In zeroing mode the signal is always high. This output is available for: Easy Box U8IO.
OUT END OF CYCLE: gauging sequence completed.

- 74 -
LAYOUT 1 [io-std01.iom] LAYOUT 2 [io-std02.iom] LAYOUT 3 [io-std03.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Start (T3) Start/Stop (T2) Batch code Bit4 (MSB)
2 Stop (T3) Batch code bit2 (MSB) Batch code Bit3
3 Zeroing mode Batch code bit1 (LSB) Batch code Bit2
4 Next Zero Step Ready Batch code Bit1 (LSB)
5 Ready Part Good Zeroing mode
6 Part Good Part Trend Next Zero Step
7 Part Reject Part Reject Disable Stat
8 Error Cycle End Redo Step
Easy BOX U8IO N°2
1 Batch Selection - -
2 Batch code bit3 (MSB) - -
3 Batch code bit2 - Ready
4 Batch code bit1 (LSB) - Part Good
5 Disable Stat - Part Reject
6 Redo Step - Error
7 Part Trend - Part Trend
8 Running - Running
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4S 1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4P
1 Start (T3) Start (T3) Start (T3)
2 Stop (T3) Stop (T3) Stop (T3)
3 Zeroing mode Zeroing mode Zeroing mode
4 Next Zero Step Next Zero Step Next Zero Step
M1 Wave N. 1,2,3,..16
1 Start/Stop (T2) Start/Stop (T2) Start/Stop (T2)
Digi Crown I/O N°1
1 Start (T3) Start/Stop (T2) Batch code Bit4 (MSB)
2 Stop (T3) Batch code bit2 (MSB) Batch code Bit3
3 Zeroing mode Batch code bit1 (LSB) Batch code Bit2
4 Next Zero Step Ready Batch code Bit1 (LSB)
5 Ready Part Good Zeroing mode
6 Part Good Part Trend Next Zero Step
7 Part Reject Part Reject Disable Stat
8 Error Cycle End Redo Step
Digi Crown I/O N°2
1 Batch Selection - -
2 Batch code bit3 (MSB) - -
3 Batch code bit2 - Ready
4 Batch code bit1 (LSB) - Part Good
5 Disable Stat - Part Reject
6 Redo Step - Error
7 Part Trend - Part Trend
8 Running - Running
9.1 Available layouts
In th
e la
yout
Nr.3
the
batc
h ch
angi
ng is
on
the
edge
, in
the
layo
ut N
r.26
the
batc
h ch
angi
ng is
on
the
leve
l.

- 75 -
LAYOUT 4 [io-std04.iom] LAYOUT 5 [io-std05.iom] LAYOUT 6/PBB [io-std06.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Start/Stop (T2) Start (T3) Start/Stop (T2)
2 Redo Step Stop (T3) Redo Step
3 Zeroing mode Zeroing mode Zero mode (on/off sul fronte)
4 Next Zero Step Ready Next Zero Step
5 Disable Stat Part Good Batch D
6 Batch code Bit3 (MSB) Part Reject Batch C
7 Batch code Bit2 Part Trend Batch B
8 Batch code Bit1 (LSB) Error Batch A
Easy BOX U8IO N°2
1 - - -
2 Ready - -
3 Part Good - -
4 Part Reject - -
5 Error - -
6 Part Trend - -
7 Running - -
8 - - -
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4S 1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4P
1 Start (T3) Start (T3) Start (T3)
2 Stop (T3) Stop (T3) Stop (T3)
3 Zeroing mode Zeroing mode Zeroing mode
4 Next Zero Step Next Zero Step Next Zero Step
M1 Wave N. 1,2,3,..16
1 Start/Stop (T2) Start/Stop (T2) Start/Stop (T2)
Digi Crown I/O N°1
1 Start/Stop (T2) Start (T3) Start/Stop (T2)
2 Redo Step Stop (T3) Redo Step
3 Zeroing mode Zeroing mode Zero mode (on/off sul fronte)
4 Next Zero Step Ready Next Zero Step
5 Disable Stat Part Good Batch D
6 Batch code Bit3 (MSB) Part Reject Batch C
7 Batch code Bit2 Part Trend Batch B
8 Batch code Bit1 (LSB) Error Batch A
Digi Crown I/O N°2
1 - - -
2 Ready - -
3 Part Good - -
4 Part Reject - -
5 Error - -
6 Part Trend - -
7 Running - -
8 - - -
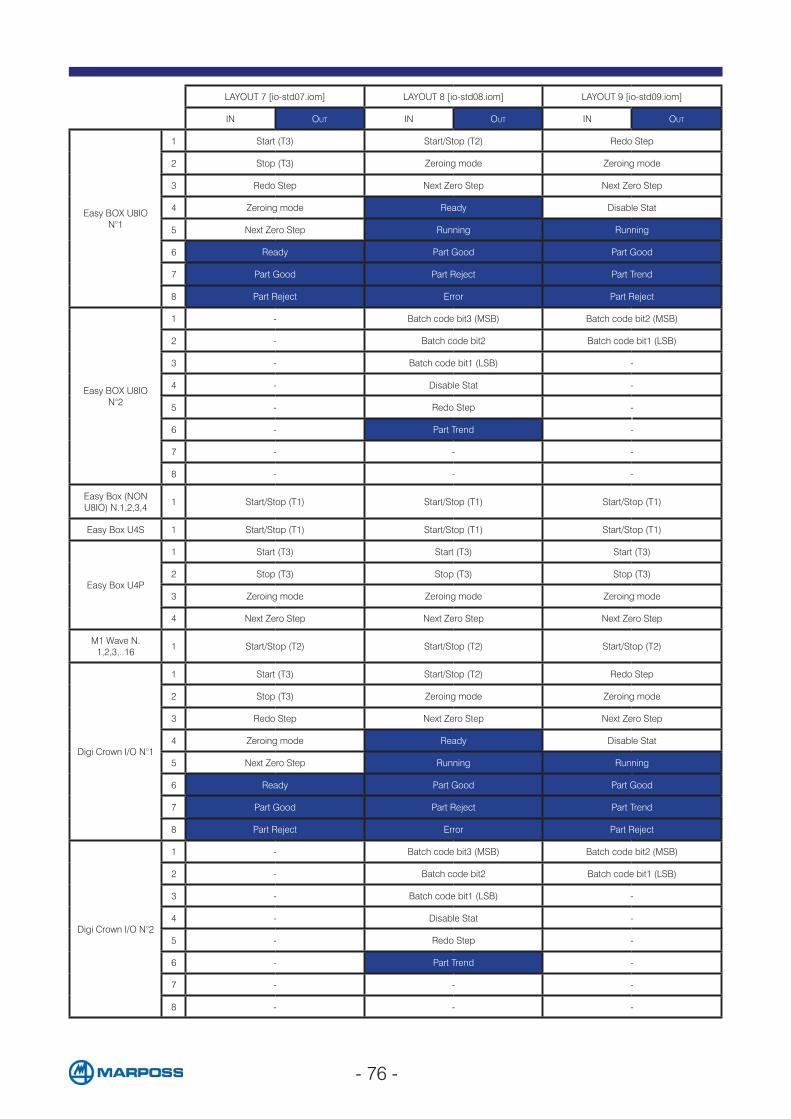
- 76 -
LAYOUT 7 [io-std07.iom] LAYOUT 8 [io-std08.iom] LAYOUT 9 [io-std09.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Start (T3) Start/Stop (T2) Redo Step
2 Stop (T3) Zeroing mode Zeroing mode
3 Redo Step Next Zero Step Next Zero Step
4 Zeroing mode Ready Disable Stat
5 Next Zero Step Running Running
6 Ready Part Good Part Good
7 Part Good Part Reject Part Trend
8 Part Reject Error Part Reject
Easy BOX U8IO N°2
1 - Batch code bit3 (MSB) Batch code bit2 (MSB)
2 - Batch code bit2 Batch code bit1 (LSB)
3 - Batch code bit1 (LSB) -
4 - Disable Stat -
5 - Redo Step -
6 - Part Trend -
7 - - -
8 - - -
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4S 1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4P
1 Start (T3) Start (T3) Start (T3)
2 Stop (T3) Stop (T3) Stop (T3)
3 Zeroing mode Zeroing mode Zeroing mode
4 Next Zero Step Next Zero Step Next Zero Step
M1 Wave N. 1,2,3,..16
1 Start/Stop (T2) Start/Stop (T2) Start/Stop (T2)
Digi Crown I/O N°1
1 Start (T3) Start/Stop (T2) Redo Step
2 Stop (T3) Zeroing mode Zeroing mode
3 Redo Step Next Zero Step Next Zero Step
4 Zeroing mode Ready Disable Stat
5 Next Zero Step Running Running
6 Ready Part Good Part Good
7 Part Good Part Reject Part Trend
8 Part Reject Error Part Reject
Digi Crown I/O N°2
1 - Batch code bit3 (MSB) Batch code bit2 (MSB)
2 - Batch code bit2 Batch code bit1 (LSB)
3 - Batch code bit1 (LSB) -
4 - Disable Stat -
5 - Redo Step -
6 - Part Trend -
7 - - -
8 - - -

- 77 -
LAYOUT 10 [io-std10.iom] LAYOUT 11 [io-std11.iom] LAYOUT 12 [io-std12.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Redo Step - Zeroing mode
2 Zeroing mode - Measuring mode
3 Emergency (active low) - Next zero step
4 Motor out - -
5 Running - -
6 Part Good - -
7 Part Trend - -
8 Part Reject - -
Easy BOX U8IO N°2
1 Batch code bit2 (MSB) - Batch code-Part Type bit1 (LSB)
2 Batch code bit1 (LSB) - Batch code - Part Type bit2
3 Next Zero Step - Batch code - Part Type bit3
4 Disable Statistics - Batch code - Part Type bit4 (MSB)
5 - -Batch code - Spindle Type (tipo mandri-
no) bit 1 (LSB)
6 - - Batch code - Spindle Type bit 2
7 - - Batch code - Spindle Type bit 3
8 - - Batch code-Spindle Type bit 4 (MSB)
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T1) - Start/Stop/Get Zero (ottieni zero) (T2)
Easy Box U4S 1 Start/Stop (T1) - Start/Stop/Get Zero (T2)
Easy Box U4P
1 Start (T3) Start /Data OK (dati OK) (Type 2) -
2 Stop (T3) Get zero (one shot (unico tentativo)) -
3 Zeroing mode Redo Step / Redo Part (ripeti pezzo) -
4 Next Zero Step Next Page (prossima pagina) -
M1 Wave N. 1,2,3,..16
1 Start/Stop (T2) - Start/Stop/Get Zero (T2)
Digi Crown I/O N°1
1 Redo Step - -
2 Zeroing mode - -
3 Next Zero Step - -
4 Disable Stat - -
5 Running - -
6 Part Good - -
7 Part Trend - -
8 Part Reject - -
Digi Crown I/O N°2
1 Batch code bit2 (MSB) - -
2 Batch code bit1 (LSB) - -
3 - - -
4 - - -
5 - - -
6 - - -
7 - - -
8 - - -

- 78 -
LAYOUT 13 [io-std13.iom] LAYOUT 14 [io-std14.iom] LAYOUT 15 [io-std15.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Batch code bit 7 (MSB) Data OK Batch code bit 7 (MSB)
2 Batch code bit 6 Get Zero (one shot) Batch code bit 6
3 Batch code bit 5 Next Page Batch code bit 5
4 Batch code bit 4 Message OK Batch code bit 4
5 Batch code bit 3 Batch D Batch code bit 3
6 Batch code bit 2 Batch C Batch code bit 2
7 Batch code bit 1 (LSB) Batch B Batch code bit 1 (LSB)
8 Start /Stop/Get Zero (T2) Batch A Start /Stop/Get Zero (T2)
Easy BOX U8IO N°2
1 Redo Step - -
2 Zeroing mode - -
3 Emergenza (attivo “low”) - -
4 Motor out - -
5 Running - -
6 Part Good - -
7 Part Trend - -
8 Part Reject -
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop/Get Zero (T2) - Start/Stop/Get Zero (T2)
Easy Box U4S 1 Start/Stop/Get Zero (T2) - Start/Stop/Get Zero (T2)
Easy Box U4P
1 - Data OK -
2 - Get Zero (one shot) -
3 - Next Page -
4 - Message OK -
M1 Wave N. 1,2,3,..16
1 Start/Stop/Get Zero (T2) - Start/Stop/Get Zero (T2)
Digi Crown I/O N°1
1 - - -
2 - - -
3 - - -
4 - - -
5 - - -
6 - - -
7 - - -
8 - - -
Digi Crown I/O N°2
1 - - -
2 - - -
3 - - -
4 - - -
5 - - -
6 - - -
7 - - -
8 - - -

- 79 -
LAYOUT 18 [io-std18.iom] LAYOUT 22 [io-std22.iom] LAYOUT 23 [io-std23.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Start /Stop/Get Zero (T2) - Start/Stop (T2)
2 Zeroing mode - Redo step
3 Batch code bit 1 (LSB)* - Batch F
4 Batch code bit 2 - Batch E
5 Batch code bit 3 - Batch D
6 Batch code bit 4 (MSB) - Batch C
7 - - Batch B
8 - - Batch A
Easy BOX U8IO N°2
1 - - Zeroing mode
2 - - Next Zero step
3 - - -
4 - - -
5 - - -
6 - - -
7 - -
8 - -
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T1) Start/Stop (T1) Start/Stop (T1)
Easy Box U4S 1 - Start/Stop (T1) Start/Stop (T1)
Easy Box U4P
1 - Start (T3) Start (T3)
2 - Stop (T3) Stop (T3)
3 - Batch A Zeroing mode
4 - Batch B Next Zero Step
M1 Wave N. 1,2,3,..16
1 - Start/Stop (T1) Start/Stop (T2)
Digi Crown I/O N°1
1 - - Start/Stop (T2)
2 - - Redo step
3 - - Batch F
4 - - Batch E
5 - - Batch D
6 - - Batch C
7 - - Batch B
8 - - Batch A
Digi Crown I/O N°2
1 - - Zeroing mode
2 - - Next Zero step
3 - - -
4 - - -
5 - - -
6 - - -
7 - - -
8 - - -
* Binary value (0=Batch 1, 15= Batch 16) * Binary value (Batch A=Batch 1, Batch B=Batch 2)

- 80 -
LAYOUT 24 [io-std24.iom] LAYOUT 25 [io-std25.iom] LAYOUT 26 [io-std26.iom]
IN OUT IN OUT IN OUT
Easy BOX U8IO N°1
1 Start (T3) Start/Stop (T2) Batch code Bit4 (MSB)
2 Stop (T3) Active batch code bit 2 (MSB) Batch code Bit3
3 Zeroing mode Active batch code bit 1 (MSB) Batch code Bit2
4 Next zero step Ready Batch code Bit1 (LSB)
5 Ready Part good Zeroing mode
6 Part good Part trend Next Zero Step
7 Part reject Part reject Disable Stat
8 Error Cycle end Redo Step
Easy BOX U8IO N°2
1 Batch selection - -
2 Batch code bit3 (MSB) - -
3 Batch code bit2 - Ready
4 Batch code bit1 (LSB) - Part Good
5 Disable stat - Part Reject
6 Redo Step - Error
7 Part trend - Part Trend
8 Running - Running
Easy Box (NON U8IO) N.1,2,3,4
1 Start/Stop (T2) Start/Stop (T1) Start/Stop (T1)
Easy Box U4S 1 Start/Stop (T2) Start/Stop (T1) Start/Stop (T1)
Easy Box U4P
1 Start (T3) Start (T3) Start (T3)
2 Stop (T3) Stop (T3) Stop (T3)
3 Zeroing mode Zeroing mode Zeroing mode
4 Next zero step Next zero step Next Zero Step
M1 Wave N. 1,2,3,..16
1 Start/Stop (T1) Start/Stop (T2) Start/Stop (T2)
Digi Crown I/O N°1
1 Start (T3) Start/Stop (T2) -
2 Stop (T3) Batch code bit2 (MSB) -
3 Zeroing mode Batch code bit1 (LSB) -
4 Next zero step Ready -
5 Ready Part good -
6 Part good Part trend -
7 Part reject Part reject -
8 Error Cycle end -
Digi Crown I/O N°2
1 Batch selection - -
2 Batch code bit3 (MSB) - -
3 Batch code bit2 - -
4 Batch code bit1 (LSB) - -
5 Disable stat - -
6 Redo Step - -
7 Part trend - -
8 Running - -
In the layout Nr.26 the batch changing is on the level, in the layout Nr.3 the batch chan-ging is on the edge

- 81 -
10 Backup & Restore
10.1 Backup
The ‘Backup and Restore’ included in Merlin enables the user to save a complete copy of all programming, configuration and measurement data in a ZIP format file. If necessary it is possible to restore the system using these data.It is possible to run the Backup & Restore software either as a tool from the Merlin software by tapping on an icon in the menu, or in stand-alone mode by running the executable file in the Merlin installation path. Running the tool in stand-alone mode should only be done as a precaution if Merlin fails to open properly. In such cases, it is possible to create a backup of the archives and send it to customer service in order to check the integrity.The option may be accessed from the “Settings” menu and only if the user is authorised to do so. In fact, it is possible to select between the following alternatives during the user configuration phase:
• Do not authorise the user to access the tool• Authorise Backup only• Authorise Backup and Restore
When the tool is started, the following window appears, where the Backup is normally selected:

- 82 -
10.2.1 Restore from external file
10.2 RestoreTap on the RESTORE option in the menu described above in order select one of the following alternatives:
To restore the system from a “ZIP” file on a device connected to a USB port, select the path by tapping on the “…” button and choose the ZIP file containing the desired backup.Tap on the START button to restore all the archives.
The default name of the file where the data backup will be saved appears, consisting of the name of the computer and the current date and time, however the user may modify it as desired. The NOTES can be used to provide additional information about the contents of the backup and are added to the comments in the file.The devices table on the right of the screen contains a list of the removable units connected to the USB ports, which are updated in real time. If no devices are present, the backup may be saved to a local folder, thereby creating a “restore point”. To create the backup, tap on START. Once the backup is complete, if an external device is connected it will be disabled automatically so that it can be removed safely.

- 83 -
10.2.2 Restore from restore point
10.2.3 Reset all
This option permits the user to restore the system from a restore point that has been saved at some earlier date in the local folder.
The third option - ‘Reset all’ - deletes all the archives and restores the Merlin to its initial state. After carrying out this procedure it is necessary to reconfigure all the devices and re-enter all the programs.
Select a Backup from the list and the entire path will be displayed in the text box above the grid, at this point, tap ‘START’ to restore all the archives.

- 84 -
APPENDIX - Statistical analysis
General definition
BATCHA set of similar measurements that are to be subjected to statistical analysis.
CHARACTERISTIC TYPEBilateral characteristic: this type of characteristic has no natural limits, therefore it is necessary to indicate specification limits; e.g. a diameter that may have a dimension greater or less than the design. Single limit characteristic: this type of characteristic has a single limit indicating an acceptability threshold, so only one specification limit need be indicated; e.g. a breaking strain control, where the part is considered acceptable if the force required to break it exceeds a certain level. This differs from a characteristic with a single, upper limit if the acceptable threshold represents the maximum value that the characteristic may assume.Unilateral characteristic: this type of characteristic has a natural, “Insuperable” limit; e.g. a parallelism that may not fall below 0. In this case, the specific limit is indicated, as well as the physical limit, if other than zero.
TOLERANCE LIMITSTwo tolerance limits can be defined for a characteristic:UTL - Upper Tolerance Limit: represents the upper specification limitLTL - Lower Tolerance Limit: represents the lower specification limit.
TOLERANCE INTERVALAlso know simply as tolerance, it represents the acceptable range of measurement values for a given characteristic. It is determined using different methods, depending on the characteristic type:Bilateral characteristic: UTL - LTL Unilateral characteristic: calculated as |TL - PL|, where TL is the tolerance limit and PL is the physical limit (usually 0).Single limit characteristic: cannot be calculated.
TOLERANCE MID-POINTThe mid-point of the tolerance interval.It is determined using different methods, depending on the characteristic type:Bilateral characteristic: (UTL – LTL) / 2Unilateral characteristic: calculated as |TL - PL| / 2.Single limit characteristic: cannot be calculated.

- 85 -
Dispersion indices
Position indices
Mean - The sum of all the measurements carried out, divided by the number of measurements.
Where:xi is the ith measurementN is the number of measurements
Range - The difference between the largest and the smallest value in a set of N measurements
Xmax - Xmin
Where Xmax is the maximum valueXmin is the minimum value
Standard deviation - Indicates the dispersion of the measurements. Given a set of measurements:
Wherexi is the ith measurementX is the mean measurement valueN is the number of measurements
NOTE: Standard deviation is also identified as SIGMA and represented by the corresponding letter in the Greek alphabet (σ).

- 86 -
Natural tolerance
Indicates the variability inherent in the measurements. It is determined using different methods, depending on the characteristic type:Bilateral or single limit characteristicNatural Tolerance = 6*Swhere S is the standard deviation of the measurements
Unilateral characteristicwith upper limit: Natural Tolerance = Minimum between (6*S) and (3*S + X)with lower limit: Natural Tolerance = Minimum between (6*S) and (3*S - X)Where:S is the standard deviation of the measurementsX is the mean value of the measurements
In the case of the unilateral characteristics formula it is assumed that the natural limit is 0. If the mean value X is closer to this 3*S limit, it means that, for this part of the measurement, 3*S cannot be considered as dispersion, because, as the limit is insuperable, the maximum dispersion value will be equivalent to the mean value.
Estimated process sigma (Sigma Hat)
When sample measurements are used to evaluate a process, instead of using the standard deviation S to find its inherent variability, we use a formula and a series of tables to estimate the process dispersion, taking into account the fact that the measure-ments were obtained through a sampling method. The index calculated in this way is known as Sigma Hat (σ). This dispersion index is based exclusively on the variability within the samples, and does not take into account any variabi-lity between different samples that may have been taken at significantly different periods. There are two formulas that can be used for estimating this dispersion: the first is based on the Range of each sample, while the second is based on the Standard Deviation of each sample.
Formula based on the sample ranges. In the above formulas, Ri represents the range of the ith sample, Nc is the number of samples taken, and d2 refers to the values in column of the same name in the tables found in the appendix, in the row corresponding to number of measurements in the sample used.
^
^

- 87 -
Process natural tollerance
NOTE: The Cp index is calculated only if control charts are provided for the characteristic.
CpK This represents the process critical capacity. It is the reference index when the statistical aim of the batch has been indicated as Process. It is calculated using different methods, depending on the characteristic type:Bilateral characteristic:Cpk = Minimum value between:(2 * (UTL – X)) / (6*σ) (2 * (X – LTL)) / (6*σ)where UTL = Upper Tolerance LimitLTL = Lower Tolerance LimitX = mean measurement valueσ = estimated deviation of the measurements
^^
^
Capability indices (Cp)The process capacity is used as the reference index when Process is selected as the statistical scope of the batch. It is only calculated in the case of bilateral characte-ristics, using the following formula:
WhereLST – LIT = Tolerance interval 6*σ = Process natural tolerance^
Natural Tolerance is an attempt to express the variability inherent in a given pro-cess. The formula depends on how the measurements are distributed. As the aim is to represent the variability of the process, we use the Sigma Hat, estimated using the samples, rather than the Standard Deviation S used in the case of Natu-ral Tolerance.Bilateral or single limit characteristicProcess Natural Tolerance = 6 * σWhere σ is the estimated process sigma
Unilateral characteristicwith upper limit: Process Natural Tolerance=Maximum between (6*σ) and (3*σ +X)with lower limit: Process Natural Tolerance=Minimum between (6*σ) and (3*σ-X)Where: σ is the standard deviation of the measurements X is the mean value of the measurements.
^
^
^
^
^ ^
^ ^
- 88 -
Quality control chartStandard XR and XS chart for bilateral or unilateral characteristics. The following table lists the possible chart types. Consult the relevant paragraph for the formulas used to calculate the control limits.
Chart name Dispersion index Forming the samples and notes
Standard XR chart (Shewhart XR chart)
RangeA consecutive number of measurements between
2 and 15
Standard XS chart (Shewhart XS chart)
SigmaA consecutive number of measurements between
2 and 15
The XR and XS charts are based on a series of values known as Control Limits that are used to control the process trend; these limits can be calculated beforehand, based on the characteristic specification limits.The following formulas are used to calculate them: the values A, D1, D2, E7, E6, B5 and B6 indicate the values in the columns of the same name in the tables found in the appendix, in the row corresponding to number of measurements in the sample used.Vn is the bilateral characteristic tolerance mid-point; whereas, if the variable is unilateral, it is assumed that Vn=0 and one of the two limits is null.Cpo is the optimum capacity index to be achieved for the process. At the moment this is equivalent to 1 in the case of bilateral characteristics, and 1.33 for unilateral characteristics.Pre-set control limits for the X chart LCL = Vn – (A x (UTL-LTL))/ (6*Cpo))UCL = Vn + (A x (UTL-LTL))/ (6*Cpo))Pre-set control limits for the R chart LCL = D1 x (UTL-LTL)/ (6*Cpo)UCL = D2 x (UTL-LTL)/ (6*Cpo)Pre-set control limits for the R chart LCL = B5 x (UTL-LTL)/(6*Cpo)UCL = B6 x (UTL-LTL)/(6*Cpo)
Unilateral or single limit characteristic:upper limit only; Cpk = (2*(TL – X)) / (6*σ) lower limit only Cpk =(2*(X – TL)) / (6*σ) Where: TL = Tolerance limit <> 0X = mean measurement value σ= estimated deviation of the measurements
^^
^

- 89 -
Calculated control limits
The XR and XS charts are based on a series of values known as Control Limits that are used to control the process trend; these limits can be calculated by using the appropriate sample measurement formulas (if possible, after having completed a chart consisting of 25 samples, with no out of control alarms). In the following formulas, the values A, D1, D2, E7, E6, B5 and B6 indicate the values in the columns of the same name in the tables found in the appendix, in the row corresponding to number of measurements in the sample used. The value Xm indicates the mean sample value, and Sm indicates the mean sigma value of the samples.
Chart name X CHART R CHART S CHART
Standard XR chart (Shewhart XR
chart)
LCL: Xm – Rm*A2UCL: Xm+Rm*A2
LCL:Rm*D3UCL:Rm*D4
-
Standard XS chart (Shewhart XS
chart)
LCL: Xm – Sm*A3UCL:Xm+ Sm*A3
-LCL:Sm*B3UCL:Sm*B4

- 90 -
Table of coefficients
Sample size
A D2 D1 B6 B5 E7 E6 D2 C4
2 2.121 3.686 0.000 2.606 0.000 4.494 0.305 1.128 .7979
3 1.732 4.358 0.000 2.276 0.000 3.979 0.498 1.693 .8862
4 1.500 4.698 0.000 2.088 0.000 3.686 0.638 2.059 .9213
5 1.342 4.918 0.000 1.964 0.000 3.491 0.749 2.326 .9400
6 1.225 5.078 0.000 1.874 0.029 3.491 0.749 2.534 .9515
7 1.134 5.203 0.205 1.806 0.113 3.491 0.749 2.704 .9594
8 1.061 5.307 0.387 1.751 0.179 3.491 0.749 2.847 .9650
9 1.000 5.394 0.546 1.707 0.232 3.491 0.749 2.970 .9693
10 0.949 5.469 0.687 1.669 0.276 3.491 0.749 3.078 .9727
11 0.905 5.534 0.812 1.637 0.313 3.491 0.749 3.173 .9754
12 0.866 5.592 0.924 1.610 0.346 3.491 0.749 3.258 .9776
13 0.832 5.646 1.026 1.585 0.374 3.491 0.749 3.336 .9794
14 0.802 5.693 1.121 1.563 0.399 3.491 0.749 3.407 .9810
15 0.775 5.737 1.207 1.544 0.421 3.491 0.749 3.472 .9823
16 0.750 5.779 1.285 1.526 0.440 3.491 0.749 3.532 .9835
17 0.728 5.817 1.359 1.511 0.458 3.491 0.749 3.588 .9845
18 0.707 5.854 1.426 1.496 0.475 3.491 0.749 3.640 .9854
19 0.688 5.888 1.490 1.483 0.490 3.491 0.749 3.689 .9862
20 0.671 5.922 1.548 1.470 0.504 3.491 0.749 3.735 .9869
21 0.655 5.950 1.606 1.459 0.516 3.491 0.749 3.778 .9876
22 0.640 5.979 1.659 1.448 0.528 3.491 0.749 3.819 .9882
23 0.626 6.006 1.710 1.438 0.539 3.491 0.749 3.858 .9887
24 0.612 6.031 1.759 1.429 0.549 3.491 0.749 3.895 .9892
25 0.600 6.058 1.804 1.420 0.559 3.491 0.749 3.931 .9896

- 91 -
Sample size
A2 D4 D3 A3 B4 B3 E2 E3
2 1.880 3.267 .000 2.659 3.267 .000 2.660 3.760
3 1.023 2.575 .000 1.954 2.568 .000 1.772 3.385
4 0.729 2.282 .000 1.628 2.266 .000 1.457 3.256
5 0.577 2.115 .000 1.427 2.089 .000 1.290 3.191
6 0.483 2.004 .000 1.287 1.970 .030 1.184 3.153
7 0.419 1.924 .076 1.182 1.882 .118 1.109 3.129
8 0.373 1.864 .136 1.099 1.815 .185 1.054 3.109
9 0.337 1.816 .184 1.032 1.761 .239 1.010 3.095
10 0.308 1.777 .223 0.975 1.716 .284 0.975 3.084
11 0.285 1.744 .256 0.927 1.679 .321 0.946 3.076
12 0.266 1.716 .284 0.886 1.646 .354 0.921 3.069
13 0.249 1.692 .308 0.850 1.618 .382 0.899 .063
14 0.235 1.671 .329 0.817 1.594 .406 0.881 3.058
15 0.223 1.652 .348 0.789 1.572 .428 0.864 3.054
16 0.212 1.636 .364 0.763 1.552 .448 0.849 3.050
17 0.203 1.621 .379 0.739 1.534 .466 0.836 3.047
18 0.194 1.608 .392 0.718 1.518 .482 0.824 3.044
19 0.187 1.596 .404 0.698 1.503 .497 0.813 3.042
20 0.180 1.586 .414 0.680 1.490 .510 0.803 3.040
21 0.173 1.575 .425 0.663 1.477 .523 0.794 3.038
22 0.167 1.566 .434 0.647 1.466 .534 0.785 3.036
23 0.162 1.557 .443 0.633 1.455 .545 0.778 3.034
24 0.157 1.548 .452 0.619 1.445 .555 0.770 3.033
25 0.153 1.541 .459 0.606 1.435 .565 0.763 3.032

- 92 -
APPENDIX - Configuring the Windows® CE Operating System
From the menu tap on the EXIT button to exit the measurement sof-tware. Merlin enters the Windows® CE Operating System.
Double tap on the digital clock displayed in the bottom right hand corner of the screen.
The date/time setting Windows® is displayed.
Select the desired time zone from the drop down menu.
Changing the Merlin date/time
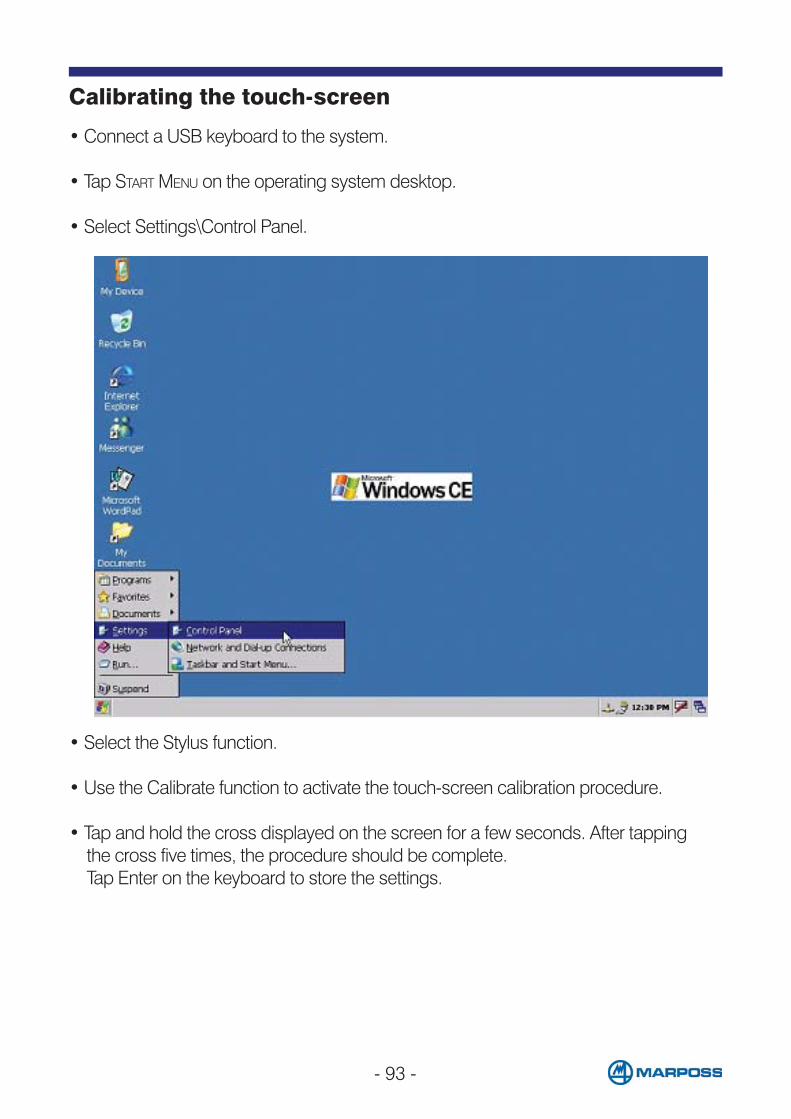
- 93 -
Calibrating the touch-screen
• Connect a USB keyboard to the system.
• Tap START MENU on the operating system desktop.
• Select Settings\Control Panel.
• Select the Stylus function.
• Use the Calibrate function to activate the touch-screen calibration procedure.
• Tap and hold the cross displayed on the screen for a few seconds. After tapping the cross five times, the procedure should be complete. Tap Enter on the keyboard to store the settings.

- 94 -
Creating a Merlin-to-PC Ethernet Link
The following procedure defines the steps necessary to link the Merlin to a PC. Specifi-cally, we are creating a network with the PC as the “host” and Merlin as its “guest.” The purpose of the connection is for simple file sharing of statistical and measurement data. Interactivity other than basic file sharing is limited at this time.
Hardware Requirements
The hardware required to link Merlin to a PC is varied depending on the type of network being set up. Wireless Cards, Routers, Bluetooth Adaptors, Internet Connectivity and similar technologies offer a multitude of networking options. The configuration used in this example details a basic ‘wired’ LAN/Ethernet connection. The minimum hardware requirements to create such a connection should be a HUB, two (2) LAN/Ethernet ca-bles and a USB keyboard.
Software
The perpetual software upgrades and releases of both Windows and of Mar-poss’ Mer-lin Gage Computer inherently create a ‘gap’ in uniformly defining a Network creation procedure. In our example, we are using Windows XP and Merlin.
Hardware Set-up
1. Plug one end of the LAN/Ethernet cable into the back of the PC and the other end into the HUB.2. Plug one end of the second LAN/Ethernet cable into the HUB and the other end into Merlin’s LAN jack.3. Power up both systems.
Windows CE set-up (on MERLIN)
1. Plug the USB keyboard into Merlin and navigate to Windows CE desktop2. From the Windows CE Start Up window, select “SETTINGS”->“NETWORK & DIAL-UP
CONNECTIONS”3. Right-Click the pre-loaded LAN icon (SMSC911X1)4. Select “SPECIFY AN IP ADDRESS”5. Enter the PC’s IP address and Subnet Mask here
NOTE: it is imperative that you have/obtain the PC’s IP number and Sub-net Mask. The simplest way to acquire these numbers is to open “COMMAND PROMPT” from the accessory menu, type in ipconfig and press Enter.
6. Click on “NAME SERVERS” tab.7. Enter the PC’s IP address in the Primary DNS line8. Click OK9. Return to Windows CE desktop

- 95 -
Windows XP Set-up (Laptop, PC, etc)
1. Create and Name a folder on the PC’s main storage drive (C:/stats_meas)2. Right-Click on the folder and select “SHARING AND SECURITY” options3. Place a check mark in the “SHARE THIS FOLDER ON THE NETWORK”4. Place a check mark in the “ALLOW NETWORK USERS TO CHANGE MY FILES”5. A file sharing folder icon now appears on the folder
Gauging Software Set-up (on the Merlin)
1. Boot up Merlin application2. Enter Global Set-up Form3. Click on the “EXPORT DEFAULT PATH” entry box” Enter the following: \\computer name\created folder’s name\4. Press Enter5. Set Automatic data export to “MEASUREMENTS AND STATISTICS”6. Set Automatic Change, Data Export format and Statistical Study preferences7. Press OK8. Go to Batch Definition page and set Automatic Data Export to “MEASUREMENTS AND STATISTICS” and choose Automatic preferences9. Press OK10. The Merlin is now set up to send Measurement & Statistical information to the PC
NOTE: a “Computer Name” “User” “Password” screen may appear at the first batch exchange. If this window appears, enter the name of the computer (this can be found by right-clicking ‘My Computer’).

- 96 -
Network connecting guidelines
Here are some guidelines, concerning the connection of a Merlin CE5 to a network share in a server on a different subnet IP:We have a Merlin device (with Windows CE v. 5 as operating system) from which we need to access to a network share (1) on a Windows Server 2000 (or 2003).The Windows server and Merlin are on different IP subnets separated by a router (you can understand also that Merlin and server are in different VLANs (2) or, the server is in a DMZ(3)).With a default IP configuration on the Merlin, while trying to access the network share of the server you receive an error message looks like ‘bad network path’.To let the Merlin becomes able to reach that network share (typically trying to access to something like \\servername\sharename) we have to modify the configuration of the Merlin TCP/IP parameters adding a WINS server address which belongs to the same IP subnet of the server (if a value is already present it has to be replaced with the new one). Typically you can configure this value using the IP address of the Windows server you need to access to.
Follows the Windows command to access a network share:from Start / run you can type \\servername\sharename (or \\server_IP_address\sharena-me) if an authentication is required, a login menu (in which you have to type username and password) will be prompted.
DOS commands to “map” and access a network share:net use * \\servername\sharename /user:domain\username ---> this is the mapping command (a password will be asked)dir \\servername\sharename ---> this is the command to list the content of the share‘net help use’ shows a help panel of the ‘net’ command
Glossary:(1) Network share http://en.wikipedia.org/wiki/Shared_resource(2) VLAN http://en.wikipedia.org/wiki/Vlan(3) DMZ http://en.wikipedia.org/wiki/DMZ_(computing)Windows CE http://en.wikipedia.org/wiki/Windows_ce

- 97 -
Network Connection Merlin Windows CE 5.0 – PC desktop Windows 7This document shows how to connect in a network a PC desktop (operating sy-stem Windows7) with a Merlin (operating system Windows CE 5.0)
Shows the settings of the network board inside the PC then disabling the option“Internet Protocol version 6 (TCP/IPv6). See the picture 1 below.
Picture 1
Entering on the “Control Panel”->”Network Connection Center …” then select “Modify advanced sharing settings” like in the picture 2 below.
Picture 2
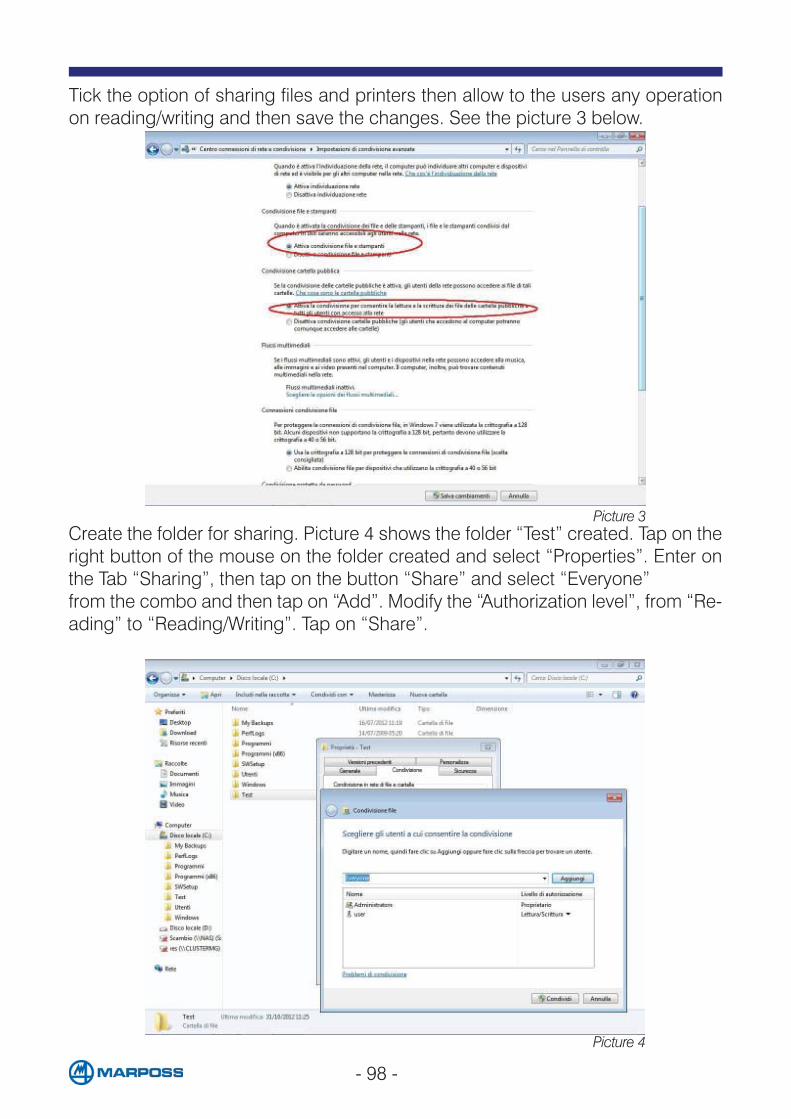
- 98 -
Picture 3
Tick the option of sharing files and printers then allow to the users any operation on reading/writing and then save the changes. See the picture 3 below.
Create the folder for sharing. Picture 4 shows the folder “Test” created. Tap on the right button of the mouse on the folder created and select “Properties”. Enter on the Tab “Sharing”, then tap on the button “Share” and select “Everyone”from the combo and then tap on “Add”. Modify the “Authorization level”, from “Re-ading” to “Reading/Writing”. Tap on “Share”.
Picture 4

- 99 -
Picture 5
The configuration of the PC is ended.
NOTE: Before accessing from Merlin to the shared folder on the PC, it’s essential to use a user profile with administrator rights. If it doesn’t exist it’s necessary to create it.
From Merlin , select the path “\\NamePCW7\Name FolderShared”.From now, the shared folder could be connected and accessible and it’s possible to create, modify and delete files.

- 100 -

- 101 -
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
NOTE:

- 102 -
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
NOTE:

- 103 -
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
________________________________________________________________________
NOTE:

- 104 -
2002/95/CE2002/96/CE
INFORMATION FOR USERSconcerning the terms of the National Legislation enforcing the Directives 2002/95/EC,
2002/96/EC and 2003/108/EN on the restriction of the use of certain hazardous substances in electrical and electronic equipment, and the disposal of waste materials
The wheelie bin symbol with a cross through it on the equipment or its packaging indicates that the pro-duct must be disposed of separately from other waste materials at the end of its working life.If the user wishes to dispose of this equipment, he/she must do so in accordance with the applicable National regu-lations governing the separation of the unit into its waste materials at the end of its working life. Separating waste materials correctly before submitting the equipment for recycling, treatment and environmentally compatible disposal can help to prevent potentially negative effects on health and the environment, as well as making it easier to reuse and/or recycle its constituent materials. Failure to dispose of this product in accordance with these indications is punishable in accordance with the applicable laws.
A full, up-to-date list of addresses is available at the official Marposs web site: www.marposs.comD2101521SG – Edition 10/2013 – Details may change without prior notice.© Copyright 2013 MARPOSS S.p.A. (Italy) – All rights reserved.MARPOSS, and other names/signs relative to Marposs products, referred to or shown in this document are registered trade marks or tra-de marks of Marposs in the United States and in other countries. Any third party rights relating to trade marks or registered trade marks referred to in this document are recognised for the respective holders.Marposs has an integrated Company Management system for quality, the environment and safety, with the fol-lowing certification: ISO 9001, ISO 14001, OHSAS 18001 and QS9000 T&E. Marposs has also been awarded EAQF 94 and the Q1-Award.








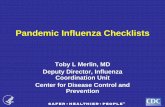

![Index [drillco-inc.com]](https://static.fdocuments.in/doc/165x107/6212ab94ca04d82b5b23b073/index-drillco-inccom.jpg)






![]d - nwg-inc.com](https://static.fdocuments.in/doc/165x107/624facf12752cd191f0126be/d-nwg-inccom.jpg)