D2 11 05 Gurvinder Singh, Institute of Robotics Technology ... · PDF fileKUKA KR500 heavy...
22
Collaborative robot safety requirements for manufacturing Professor Gurvinder Singh Virk Trustee, CLAWAR Association Ltd, UK; [email protected] Technical Director, InnotecUK, UK; [email protected] IEC TC62: Electrical equipment in medical practice • SC 62A: Common aspects of electrical equipment used in medical practice • SC52D: Electromedical equipment 1) Convener: ISO TC 299/WG2: Personal care robot safety 2) Convener: IEC SC62A & ISO TC 299 JWG9: MEE & S using robotic technology 3) Convener: ISO TC 299/WG06: Modularity for service robots 4) Director: euRobotics Topic Group Standardisation for H2020 PERSONAL CARE ROBOTS MEDICAL ROBOTS ISO TC299 Robotics JWG36: Rehabilitation WG2: Personal care robot safety ME EQUIPMENT INDUSTRIAL ROBOTS MILITARY JWG9: MEE&S using robotic technology WG3: Industrial robots
Transcript of D2 11 05 Gurvinder Singh, Institute of Robotics Technology ... · PDF fileKUKA KR500 heavy...

Collaborative robot safety requirements for manufacturing
Professor Gurvinder Singh Virk Trustee, CLAWAR Association Ltd, UK; [email protected] Technical Director, InnotecUK, UK; [email protected]
IEC TC62: Electrical equipment in medical practice • SC 62A: Common aspects of electrical equipment used in medical practice • SC52D: Electromedical equipment
1) Convener: ISO TC 299/WG2: Personal care robot safety 2) Convener: IEC SC62A & ISO TC 299 JWG9: MEE & S using robotic technology 3) Convener: ISO TC 299/WG06: Modularity for service robots 4) Director: euRobotics Topic Group Standardisation for H2020
PERSONAL CARE ROBOTS MEDICAL ROBOTS
ISO TC299 Robotics
JWG36: Rehabilitation WG2: Personal care robot safety
ME EQUIPMENT INDUSTRIAL ROBOTS MILITARY
JWG9: MEE&S using robotic technology WG3: Industrial robots

Summary of presentation • Changing world of robotics
– Industrial Ö Service • Role of regulation • New requirements for personal care robots
– ISO 13482:2014 • New safety guidance for collaborative
industrial robots – ISO TS 15066
• Conclusions
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 2

Robot are dangerous: Impacts

Traditional industrial robot applications
• Powerful machines operating at high speeds and with great precision and dexterity
• Designed to operate in workcells separated from humans for safety
Robot workcells
Safety switches Light curtains, lasers and pressure mats, etc
Traditional robot workcell setup
Human access to the robot’s operational space in the workcell is strictly controlled and regulated

New ways of using industrial robots
KUKA Robocoaster Robot
KUKA KR500 heavy duty arm
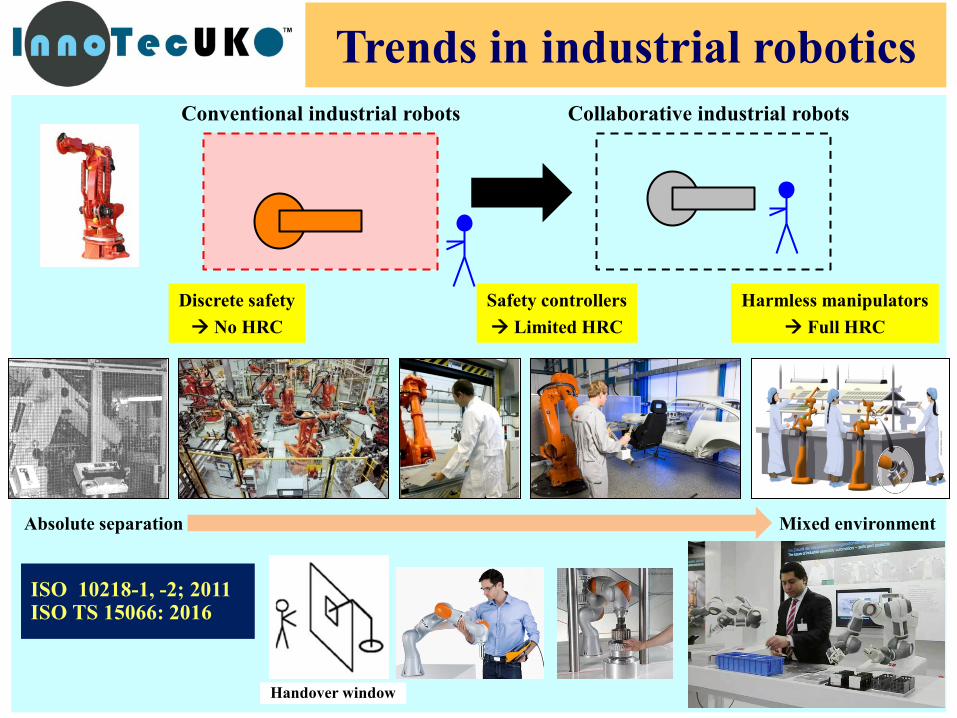
Trends in industrial robotics
Handover window
Conventional industrial robots Collaborative industrial robots
Discrete safety Æ No HRC
Safety controllers Æ Limited HRC
Harmless manipulators Æ Full HRC
Absolute separation Mixed environment
ISO 10218-1, -2; 2011 ISO TS 15066: 2016

Future Needs: Manufacturing to Services
• Robots to do tasks that must be done but can’t be done any other way
• Robots need to move out of the factory to “everywhere”
• Robots need to do a WIDE variety of “service” tasks rather than only “manufacturing” operations
• Robotics has good potential because society is “ageing” and more dependent on technology – New tasks for robots emerging in everyday life
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 7

Industrial / service robots: Distinctions and future requirements…. SAFETY issues
Industrial Robots Service Robots
Working environments
Controlled and defined environments
Information structured/ unstructured environments
Users Training for specified tasks in defined environments
Training to cover wide range of tasks in info structured/ unstructured environments
Safety Machine dependent (ISO 10218-1)
Dependent on the robot and the user (ISO 13482)
Working philosophy
To keep robots and humans separated (see ISO 10218-1, -2; ISO TS 15066)
Robots and humans must share workspace for providing/ receiving the services (see ISO 13482)
Machine design
Flexible on commissioning for defined task
Flexible on demand for generic tasks/ users
Need:
Flexibility
Usability
Safety
Human-Robot Collaboration
Effectiveness
Reusable

Role of regulation • Countries need to regulate their own markets to ensure products
are safe and organisational procedures reduce environmental impact to allow trade between countries to simplify procedures and make things work.
• Allow consumers to benefit by the knowledge that state-of-the-art practices are developed/adopted for global relevancy and standards help this process
• Types of standards: Safety, Quality, and efficiency specifications for products, services and systems – Minimum acceptable requirements for: Health, Safety, Environment – Metrics for assessing: Safety related performance, quality performance – Guidance documents: Test procedures – Other standards: Inter-operability, terminology
EC Directives • Machinery Directive • Medical Device Directive

Generic safety design methodology
• ISO 12100 defines a standard approach to designing machines to achieve safety requirements:
1. First, try to achieve the safety requirements by means of inherently safe design 2. If inherently safe designs are not possible, then try to achieve the requirements by
means of safeguarding or protective measures 3. If neither of these solutions are possible, then provide information for use to the
operator (warnings, instructions) to assist the operator in achieving acceptable safety 4. (implicit) If none of these are possible, then acceptable safety cannot be achieved and
the machine should not be used
• Harmonised safety standards for robots – EN ISO 10218-1:2011, Safety requirements for industrial robots –
Robots – EN ISO 10218-2:2011, Safety requirements for industrial robots –
Robot systems and integration – ISO TS 15066:2016, Collaborative industrial robots – EN ISO 13482:2014, Safety requirements for personal care robots

Traditional industrial robots ISO 10218-1, -2: Industrial robot safety • Humans and operational industrial robots to be
kept separated except when robot is in collaborative mode: – Visual indication of collaborative mode – Robot shall stop – Hand guiding mode – Maintain determined speed and separation distance
from operator – Power and force limiting mode
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 11

Safety requirements for personal care robots
WG2: Personal care robot safety (non-medical). EN ISO 13482: 2014 1. Mobile servant robot: personal care robot that is capable of travelling to
perform serving tasks in interaction with humans, such as handling objects or exchanging information
2. Physical assistant robot (PAR): personal care robot that physically assists a user to perform required tasks by providing supplementation or augmentation of personal capabilities – restraint type PAR: PAR that is fastened to a human during use – restraint-free type PAR: PAR that is not fastened to a human during use
3. Person carrier robot: personal care robot with the purpose of transporting humans to an intended destination.
Mobile servant Physical assistant Person carrier robots

Exoskeleton operational spaces (ISO 13482)
Maximum Space
Restricted Space
MonitoredSpace
Safeguarded Space
Protectivestop space
ROBOT
HUMAN
Safety relatedobject
Personal care robots
Physical assistant robots

Specific safety clauses in 13482 Safety requirements and protective measures. Hazards due to: • Charging battery • Energy storage and supply • Robot shape • Emissions • Electromagnetic interference • Stress, posture and usage • Robot motion • Insufficient durability • Incorrect autonomous actions • Contact with moving
components • Lack of awareness • Environmental conditions • Localization & navigation errors
Safety related control system requirements for: • Robot stopping • Safety related speed control • Safety related environmental
sensing • Stability control • Safety related force control • Singularity protection • Design of human interface • Manual control devices • Operational modes
EN ISO 13482: Safety requirements for personal care robots published in Feb 2014

New safety for collaborative industrial robots
ISO TS 15066: Safety requirements for industrial robots – Collaborative operation • Aimed at combining repetitive performance of industrial robots with skills of people
– People have excellent capability for solving complex and imprecise tasks – Industrial robots exhibit precision, power and endurance
• To achieve safety, robotic applications mainly exclude operator access to operations area while robot is active (ISO 10218-1, -2). Hence a variety of operations requiring human intervention often cannot be automated using robot systems
• TS 15066 provides guidance for collaborative robot operation where a robot system and people share the same workspace. In such operations the integrity of the safety-related control system is of major importance, particularly when process parameters such as speed and force are being controlled
• A comprehensive risk assessment is required to assess not only the robot system itself but also its operational environment; this can often lead to ergonomic advantages, e.g. improvements of worker posture.
30 Nov 2016

Key definitions in TS 15066 • collaborative workspace: space within the operating space
where the robot system (including the workpiece) and a human can perform tasks concurrently during production operation
• quasi-static contact: contact between an operator and part of a robot system where the operator body part can be clamped between a moving part of a robot system and another fixed or moving part of the robot cell
• transient contact: contact between an operator and part of a robot system where the operator body part is not clamped and can recoil or retract from the moving part of the robot system
• body model: representation of the human body consisting of individual body segments characterized by biomechanical properties
vrel
F

Collaborative application design
Design of robot system and associated work cell shall take into consideration: • the established limits (three dimensional) of the
collaborative workspace • collaborative workspace, access and clearance • ergonomics & human interface with equipment • use limits • transitions (time limits)
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 17

Types of collaboration operation
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 18
ISO 10218-1,
clause Type of collaborative operation Main means of risk
reduction
5.10.2 Safety-rated monitored stop (Example: manual loading-station)
No robot motion when operator is in collaborative work space
5.10.3 Hand guiding (Example: operation as assist device)
Robot motion only through direct input of operator
5.10.4 Speed and separation monitoring (Example: replenishing parts containers)
Robot motion only when separation distance above minimum separation distance
5.10.5
Power and force limiting by inherent design or control (Example: ABB YuMi® collaborative assembly robot)
In contact events, robot can only impart limited static and dynamics forces

ISO TS 15066: Body model
Body Region Specific Body Area Front/ Rear
Skull and forehead 1 Middle of forehead Front 2 Temple Front Face 3 Masticatory muscle Front Neck 4 Neck muscle Rear 5 Seventh neck vertebra Rear Back and shoulders 6 Shoulder joint Front 7 Fifth lumbar vertebra Rear Chest 8 Sternum Front 9 Pectoral muscle Front Abdomen 10 Abdominal muscle Front Pelvis 11 Pelvic bone Front Upper arms and elbow joints 12 Deltoid muscle Rear 13 Humerus Rear 16 Arm nerve Front Lower arms and wrist joints 14 Radial bone Rear 15 Forearm muscle Rear Hands and fingers 17 Forefinger pad D Front 18 Forefinger pad ND Front 19 Forefinger end joint D Rear 20 Forefinger end joint ND Rear 21 Thenar eminence Front 22 Palm D Front 23 Palm ND Front 24 Back of the hand D Rear 25 Back of the hand ND Rear Thighs and knees 26 Thigh muscle Front 27 Kneecap Front Lower legs 28 Middle of shin Front 29 Calf muscle Rear
Figure A.1 — Body Model Descriptions
Quasi-static and transient contacts defined. Power and force limits based on pain sensitivity thresholds are presented for 29 points on the body. These can be used to establish limits for various body areas.

Table A.2 – Biomechanical limits
Body Region Specific Body Area
Quasi-Static Contact Transient Contact Maximum Allowable
Pressure (pmax) [N/cm2] (see NOTE 1)
Maximum Allowable Force (Fmax)
[N] (see NOTE 2)
Maximum Allowable Pressure Multiplier PT
(see NOTE 3)
Maximum Allowable Force Multiplier FT
(see NOTE 3)
Skull and forehead
1 Middle of forehead 130 130 N/A N/A 2 Temple 110 N/A Face 3 Masticatory muscle 110 65 N/A N/A Neck 4 Neck muscle 140 150 2 2 5 Seventh neck vertebra 210 2 Back and shoulders
6 Shoulder joint 160 210 2 2 7 Fifth lumbar vertebra 210 2 2
Chest 8 Sternum 120 140 2 2 9 Pectoral muscle 170 2 Abdomen 10 Abdominal muscle 140 110 2 2 Pelvis 11 Pelvic bone 210 180 2 2 Upper arms & elbow joints
12 Deltoid muscle 190 150 2 2 13 Humerus 220 2
Lower arms and wrist joints
14 Radial bone 190 160
2 2 15 Forearm muscle 180 2
16 Arm nerve 190 2
Hands and fingers
17 Forefinger pad D 300
140
2
2
18 Forefinger pad ND 270 2 19 Forefinger end joint D 280 2 20 Forefinger end joint ND 220 2 21 Thenar eminence 200 2 22 Palm D 260 2 23 Palm ND 260 2 24 Back of the hand D 200 2 25 Back of the hand ND 190 2
Thighs and knees
26 Thigh muscle 250 220 2 2 27 Kneecap 220 2 Lower legs 28 Middle of shin 220 130 2 2 29 Calf muscle 210 2
Note 1: Limits from pain onset level studies, and represent the 75th percentile of the range of recorded values for a specific body area Note 2: From literature study of 188 sources and based on body regions, not on specific areas. Could lead to minor injuries 1 on AIS. Note 3: From literature sources, transient limits can be at least twice as quasi-static values for force and pressure

ISO TS 15066 Body region characteristics
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 21
Body region
Effective spring constant[4] (k) [N/mm]
Effective mass[7] (mH) [kg]
Skull and forehead 150 4.4 Face 75 4.4 Neck 50 1.2 Back and shoulders 35 40 Chest 25 40 Abdomen 10 40 Pelvis 25 40 Upper arms and elbow joints 30 3 Lower arms and wrist joints 40 2 Hands and fingers 75 0.6 Thighs and knees 50 75 Lower legs 60 75
Table A.3 — Effective masses and spring constants for the body model (based on total weight of 75 kg)
Note: Mass values for thighs, knees and lower legs are set to the full body weight, since these body parts are not free to recoil or retract from impact while the operator is standing.
• Energy limit values to different body regions (Table A.4)
• Relationship between transferred energy to different body regions and robot speed during transient contact (Table A.5)

Conclusions • Robotics evolving to new applications and
new challenges emerging for – Industrial robots: H-R collaboration – Personal care robots (close H-R interaction+contact) – Medical robots (safety and essential performance)
• Standardization vital for ensuring safety and success for the new needed robots – Safety requirements: ISO 10218-1, ISO 10218-2,
ISO TS 15066, ISO 13482 – Quality and efficiency metrics also needed
30 Nov 2016 Robot safety, Next-Generation Robotics & Automation, Birmingham, UK 22