CSE328: Fundamentals of Computer Graphicscse328/2012-lecture-notes/3D...ST NY BR K STATE UNIVERSITY...
75
STNY BRK STATE UNIVERSITY OF NEW YORK Department of Computer Science Center for Visual Computing CSE328: Fundamentals of Computer Graphics Hong Qin Department of Computer Science State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334 [email protected] http://www.cs.sunysb.edu/~qin
Transcript of CSE328: Fundamentals of Computer Graphicscse328/2012-lecture-notes/3D...ST NY BR K STATE UNIVERSITY...

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
CSE328: Fundamentals of Computer Graphics
Hong Qin
Department of Computer Science
State University of New York at Stony Brook (Stony Brook University)
Stony Brook, New York 11794--4400
Tel: (631)632-8450; Fax: (631)632-8334
http://www.cs.sunysb.edu/~qin

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Transformation and Viewing

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
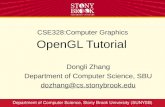
Cartesian Coordinate System
-Z
+Z
-Y
+Y
-X +X +Z
-Z
-Y
+Y
-X +X
Right-handed
Left-handed

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
3D Graphics Concepts
• 3D coordinate system
– x, y, and z values
– Depth information
• Geometric modeling of various 3D objects
– Point, line, polygon (residing on a 3D plane)
– Curve, surface, solid

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
3D Graphics Concepts
• Geometric transformation
• 3D viewing – Parallel projection
– Perspective projection
• Display methods of 3D objects – Wireframe
– Shaded objects
– Visible object identification
– Photo-realistic rendering techniques
– 3D stereoscopic viewing

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Euclidean Space
• Scalar value
• Points: P = (x,y,z)
• Vectors: V = [x,y,z]
– Magnitude or distance ||V|| = (x2+y2+z2)
– Direction
– No position
• Position vector
– Think of as magnitude and distance relative to a point, usually the origin of the coordinate system

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Review of Common Vector Operations in 3D • Addition of vectors
– V1+V2 = [x1,y1,z1] + [x2,y2,z2] = [x1+x2, y1+y2, z1+z2]
• Multiply a scalar with a vector – sV = s[x,y,z] = [sx,sy,sz]
• Dot product – V1V2 = [x1,y1,z1][x2,y2,z2] = [x1x2+y1y2+z1z2]
– V1V2 = ||V1|| ||v2|| cos where is the angle between V1 and V2
• Cross product of two vectors – V1V2 = [x1,y1,z1][x2,y2,z2] = [y1z2-y2z1, x2z1-x1z2, x1y2-x2y1]
= - V2V1
– Results in a vector that is orthogonal to the plane defined by V1 and V2

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection Parallel lines converge
Distant objects appear smaller
Textured elements become smaller with distance

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues
CSE528 Lectures

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Depth Cue via Occlusion

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Depth Cue: Depth of Focus

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Depth Cue: Cast Shadows

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Atmospheric Depth
CSE528 Lectures
Reduction in contrast of distant objects

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Shape from Shading

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Structure from Motion
n
a
ba
c

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues
Placement of virtual hand or object
Need for head-coupled perspective

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Eye Convergence
CSE528 Lectures
Better for relative depth than for absolute depth

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Stereoscopic Depth
CSE528 Lectures

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Texture Mapping

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Environment Mapping

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Interaction with Light

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Shadowing Effects

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Transparency

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Plane Equation

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D Geometric Transformations (A Quick Review)
• Translation
• Rotation
• Scaling
• Shear
• Homogenous Coordinates
• Matrix Representations
• Composite Transformations

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Translation
• x’=x+tx
• y’=y+ty
x
y
(x,y)
(x’,y’)
y
x
t
t
y
x
y
x
'
'

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation
• x’=x • cos - y • sin
• y’=x • sin + y • cos
x
y
(x,y)
(x’,y’)
y
x
y
x
cossin
sincos
'
'

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Scaling
• x’=Sx • x
• y’=Sy • y
x
y
(x,y)
(x’,y’)
y
x
S
S
y
x
y
x
0
0
'
'

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
• x’=x + hx • y
• y’=y
y
xh
y
x x
10
1
'
'
Shear

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Homogenous Coordinates: Geometric Intuition
• Each position (x, y) is represented as (x, y, 1).
• All transformations can be represented as matrix
multiplication.
• Composite transformation becomes easier.

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Translation in Homogenous Coordinates
• x’=x+tx
• y’=y+ty
x
y
P = (x,y)
P’ = (x’,y’)
1100
10
01
1
'
'
y
x
t
t
y
x
y
x
P’ = T(tx , ty) • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
• x’=x • cos - y • sin
• y’=x • sin + y • cos
x
y
P = (x,y)
P’ = (x’,y’)
1100
0cossin
0sincos
1
'
'
y
x
y
x
Rotation in Homogenous Coordinates
P’ = R( ) • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
• x’=sx • x
• y’=sy • y
x
y
(x,y)
(x’,y’)
1100
00
00
1
'
'
y
x
s
s
y
x
y
x
Scaling in Homogenous Coordinates
P’ = S(sx , sy) • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
• x’=x + hx • y
• y’=y
1100
010
01
1
'
'
y
xh
y
x x
Shear in Homogenous Coordinates
P’ = SHx • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D Geometric Transformations
• Translation
• Rotation
• Scaling
• Shear
• Homogenous Coordinates
• Composite Transformations

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
2D Geometric Transformations
• Translation
• Rotation
• Scaling
• Shear
• Homogenous Coordinates
• Composite Transformations
– Rotation about a fixed point

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
(xr ,yr)
Rotation About a Fixed Point
1. Translate the object to the origin.
2. Rotate around the origin.
3. Translate the object back.

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
(xr ,yr)
Rotation About a Fixed Point
1. Translate the object to the origin

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation About a Fixed Point
2. Rotate about origin

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation About a Fixed Point
(xr ,yr)
3. Translate the object back

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation About a Fixed Point 1. Translate the object to the origin.
2. Rotate around the origin.
3. Translate the object back.
100
10
01
100
0cossin
0sincos
100
10
01
r
r
r
r
y
x
y
x
(xr ,yr)
P’ = T(xr , yr) • R( ) • T(-xr , -yr) • P
T(xr , yr) • R( ) • T(-xr , -yr)

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
3D Geometric Transformations
• Basic 3D Transformations
– Translation
– Rotation
– Scaling
– Shear
• Composite 3D Transformations
• Change of Coordinate systems

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Translation
x
y
(x, y, z)
(x’,y’,z’)
11000
100
010
001
1
'
'
'
z
y
x
t
t
t
z
y
x
z
y
x
P’ = T• P z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation about z-axis
x
y
11000
0100
00cossin
00sincos
1
'
'
'
z
y
x
z
y
x
P’ = Rz()• P
z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation about x-axis
x
y
11000
0cossin0
0sincos0
0001
1
'
'
'
z
y
x
z
y
x
P’ = Rx()• P
z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation about y-axis
x
y
11000
0cos0sin
0010
0sin0cos
1
'
'
'
z
y
x
z
y
x
P’ = Ry()• P
z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation About a Fixed Point
1. Translate the object to the origin.
2. Rotate about the three axis, respectively.
3. Translate the object back.
Ri = Rx(x,i) • Ry(y,i) • Rz(z,i)
P’ = T (xr , yr, , zr) • R1 * R2 * R3 • T (-xr , -yr, , -zr) • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Rotation with Arbitrary Direction
1. We will have to translate an arbitrary vector so
that its starting point starts from the origin
2. We will have to rotate w.r.t. x-axis so that this
vector stays on x-z plane
3. We will then rotate w.r.t. y-axis so that this
vector aligns with z-axis
4. We will then rotate w.r.t. z-axis
5. Reverse (3), (2), and (1)

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Scaling
x
y
(x, y, z)
(x’,y’,z’)
11000
000
000
000
1
'
'
'
z
y
x
s
s
s
z
y
x
z
y
x
P’ = S • P z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
11000
0100
010
001
1
'
'
'
z
y
x
h
h
z
y
x
y
x
Shear
P’ = SHxy • P

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Change in Coordinate Systems
y
z’
x
z x’
y’
y
z’
x
z
x’ y’
P’ = M • P
M can be a combination of translation,
rotation and scaling.

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Taking a Picture with a Camera
• Geometric Coordinate Systems: Local, World,
Viewing
• Graphics Rendering Pipeline
• ModelView
– Matrix operations on models
• World coordinates to Viewing coordinates
– Matrix operations (models or cameras)
• Projection with a camera

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Viewing in 3D
• Planar Geometric Projections
• Parallel Orthographic Projections
• Perspective Projections
• Projections in OpenGL
• Clipping

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Planar Geometric Projections
• Maps points from camera coordinate system to
the screen (image plane of the virtual camera).
Planar Geometric Projections
Parallel Perspective
Oblique Orthographic
Image Plane
Center of Projection (COP) Image Plane

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Parallel Orthographic Projection
• Preserves X and Y coordinates.
• Preserves both distances and angles.
Image Plane

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Parallel Orthographic Projection
11000
0000
0010
0001
1
z
y
x
z
y
x
p
p
p
x
(x, y, z)
z
y • xp = x
• yp = y
• zp = 0
(xp, yp, 0) z = 0

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection
• Only preserves parallel lines that are parallel to
the image plane.
• Line segments are shorten by distance.
Image Plane
Center of Projection (COP)

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection Parallel lines converge
Distant objects appear smaller
Textured elements become smaller with distance

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues
CSE528 Lectures

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Cues

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection
x
(x, y, z)
z
y
(xp, yp, zp) z = d

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection
x
(x, z)
z
(xp, d) z = d
• zp = d
• xp = (x• d) / z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection
y
(y, z)
z
(yp, d)
z = d
• zp = d
• yp = (y• d) / z

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Perspective Projection
• xp = (x• d) / z =x/(z/ d)
• yp = (y• d) / z =y/(z/ d)
• zp = d =z/(z/ d)
10/100
0100
0010
0001
z
y
x
dh
z
y
x
h
h
h
h
z
y
x
h
h
h
h
z
y
x
h
h
h
p
p
p
/1000
0/100
00/10
000/1
1

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Viewing in 3D
• Planar Geometric Projections
• Parallel Orthographic Projections
• Perspective Projections
• Projections in OpenGL

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Viewing in 3D
• Planar Geometric Projections
• Parallel Orthographic Projections
• Perspective Projections
• Projections in OpenGL
– Positioning of the Camera
– Define the view volume

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Positioning the Camera • By default, the camera is placed at the origin pointing
towards the negative z-axis.
x
z
y

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Positioning the Camera • OpenGL Look-At Function
gluLookAt(eyex, eyey, eyez, atx, aty, atz, upx, upy, upz)
• View-reference point (VRP)
• View-plane normal (VPN)
• View-up vector (VUP)
x
z
y
(atx, aty, atz)
(eyex, eyey, eyez)
(upx, upy, upz)

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Defining the Parallel View Volume
x
z
y
(xmax, ymax, -far)
(xmin, ymin, -near)
glOrtho(xmin, xmax, ymin, ymax, near, far)
View Volume

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
Defining the Perspective View Volume
x
z
y
(xmax, ymax, -far)
(xmin, ymin, -near)
glFrustum(left, right, bottom, top, near, far)

STNY BRK STATE UNIVERSITY OF NEW YORK
Department of Computer Science
Center for Visual Computing
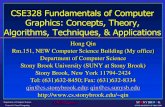
Defining the Perspective View Volume
x
z
y w
gluPerspective(fovy, aspect, near, far)
h
fov