
CS35101 Computer Architecture Spring 2006 Week 1 Slides adapted from: Mary Jane Irwin (mji)mji...
24
CS35101 Computer Architecture Spring 2006 Week 1 Slides adapted from: Mary Jane Irwin (www.cse.psu.edu/~mji ) Course url: www.cs.psu.edu/~cg331 [Adapted from Dave Patterson’s UCB CS152 slides]
-
Upload
willis-hensley -
Category
Documents
-
view
222 -
download
1
Transcript of CS35101 Computer Architecture Spring 2006 Week 1 Slides adapted from: Mary Jane Irwin (mji)mji...

CS35101Computer
ArchitectureSpring 2006
Week 1
Slides adapted from:
Mary Jane Irwin (www.cse.psu.edu/~mji)
Course url: www.cs.psu.edu/~cg331
[Adapted from Dave Patterson’s UCB CS152 slides]

Course Administration Instructor: Paul J Durand
[email protected]://www.cs.kent.edu/~durand
Labs: Accounts on loki or neptune
Texts: Computer Organization and Design: The Hardware/Software Interface,
Third Edition, Patterson and Hennessy

Course Goals and Structure
Introduction to the major components of a computer system, how they function together in executing a program, how they are designed.
MIPS assembler programming using the spim system

spim Assembler and Simulator
spim is a self-contained assembler and simulator for the MIPS R2000/R3000
It provides a simple assembler, debugger and a simple set of operating system services
It implements both a simple, terminal-style interface and a visual windowing interface
Available as xspim on unix
- installed on the CS unix machines loki, hermes, neptune, poseidon
PCSpim on Windows- can be downloaded and installed on your own PC from
www.cs.wisc.edu/~larus/SPIM/pcspim.exe
Sorry, there is no Macintosh version of spim
Head’s Up This week’s material
Course introduction- Reading assignment – PH 1.1 through 1.3 and A.9 through A.10
(on cd)
Reminders Make sure your unix account is operational; change your
password to something you can remember and that is secure (must be six to eight alphanumeric characters)
Check out the course homepage (www.cs.kent.edu/~durand)
Next week’s material Introduction to MIPS assembler
- Reading assignment - PH 2.1 through 2.7, omit 2.6

What You Should Already Know How to write, compile and run programs in a higher
level language (C, C++, Java, …)
How to create, organize, and edit files and run programs on Unix
How to represent and operate on positive and negative numbers in binary form (two’s complement, sign magnitude, etc.)
Logic design How to design combinational components (Boolean algebra,
logic minimization, decoders and multiplexors)

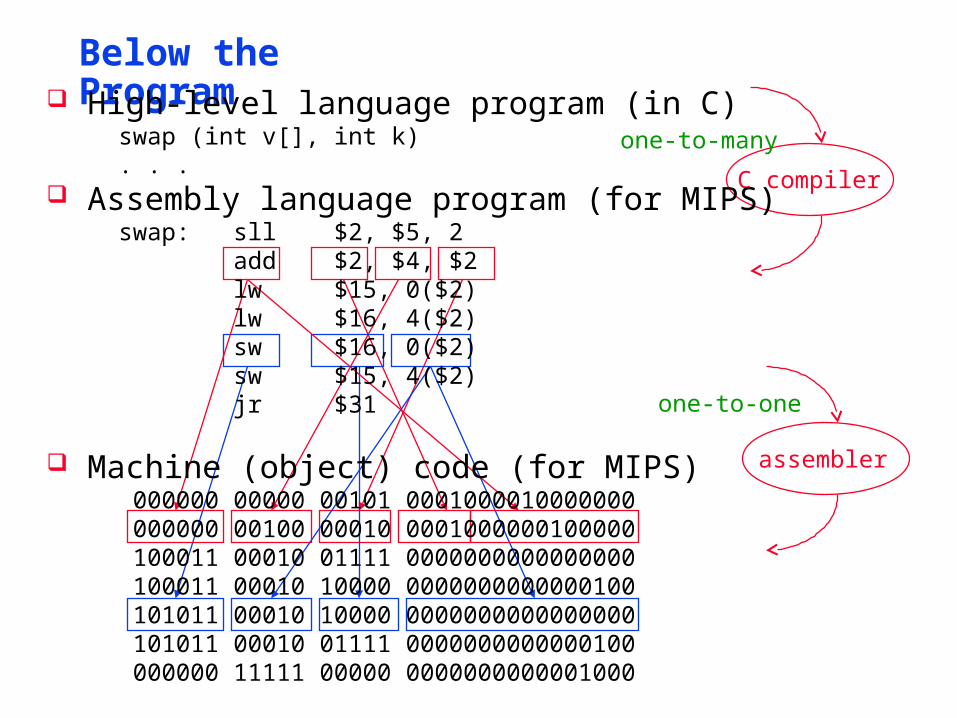
Below the Program High-level language program (in C)
swap (int v[], int k)(int temp;
temp = v[k];v[k] = v[k+1];v[k+1] = temp;
)
Assembly language program (for MIPS)swap: sll $2, $5, 2
add $2, $4,$2lw $15, 0($2)lw $16, 4($2)sw $16, 0($2)sw $15, 4($2)jr $31
Machine (object) code (for MIPS) 000000 00000 00101 0001000010000000 000000 00100 00010 0001000000100000
. . .
C compiler
assembler

Advantages of Higher-Level Languages
Higher-level languages
As a result, very little programming is done today at the assembler level
Allow the programmer to think in a more natural language and for their intended use (Fortran for scientific computation, Cobol for business programming, Lisp for symbol manipulation, …)
Improve programmer productivity – more understandable code that is easier to debug and validate
Improve program maintainability Allow programmers to be independent of the computer on
which they are developed (compilers and assemblers can translate high-level language programs to the binary instructions of any machine)
Emergence of optimizing compilers that produce very efficient assembly code optimized for the target machine

Machine Organization
Capabilities and performance characteristics of the principal Functional Units (FUs)
e.g., register file, ALU, multiplexors, memories, ...
The ways those FUs are interconnected
e.g., buses
Logic and means by which information flow between FUs is controlled
The machine’s Instruction Set Architecture (ISA)
Register Transfer Level (RTL) machine description

Major Components of a Computer
Processor
Control
Datapath
Memory
Devices
Input
Output

Impacts of Advancing Technology
Processor logic capacity: increases about 30% per year performance: 2x every 1.5 years
Memory DRAM capacity:4x every 3 years memory speed: 1.5x every 10 years cost per bit: decreases about 25% per year
Disk capacity: increases about 60% per year
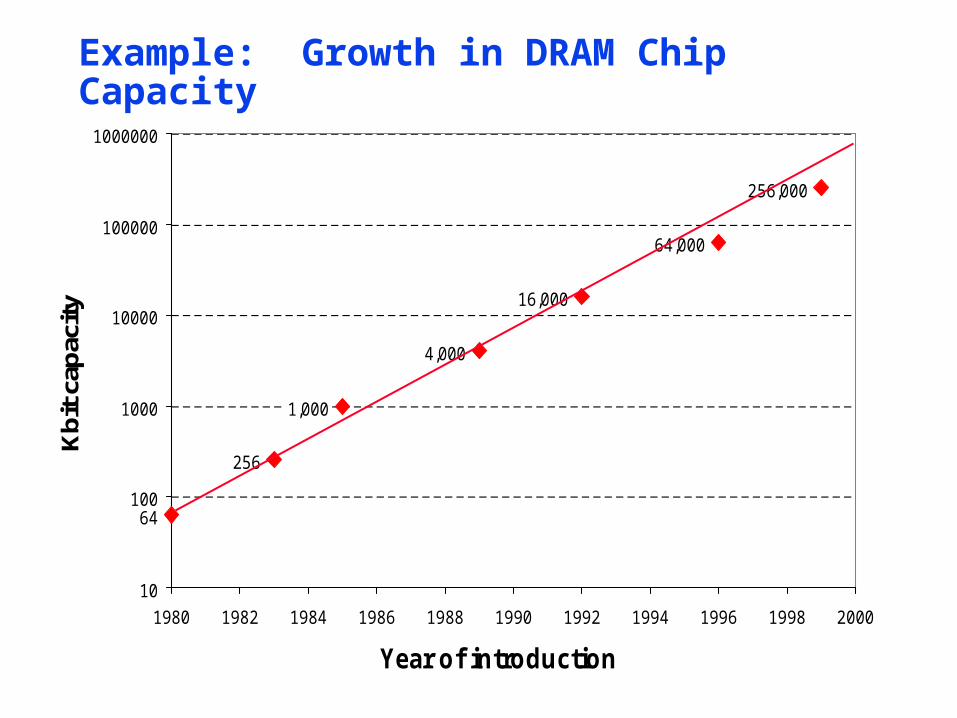
Example: Growth in DRAM Chip Capacity
64
256
1,000
4,000
16,000
64,000
256,000
10
100
1000
10000
100000
1000000
1980 1982 1984 1986 1988 1990 1992 1994 1996 1998 2000
Year of introduction
Kb
it c
apac
ity
Below the Program
C compiler
assembler
one-to-many
one-to-one
High-level language program (in C) swap (int v[], int k) . . . Assembly language program (for MIPS) swap: sll $2, $5, 2 add $2, $4, $2 lw $15, 0($2) lw $16, 4($2) sw $16, 0($2) sw $15, 4($2) jr $31
Machine (object) code (for MIPS) 000000 00000 00101 0001000010000000 000000 00100 00010 0001000000100000 100011 00010 01111 0000000000000000 100011 00010 10000 0000000000000100 101011 00010 10000 0000000000000000 101011 00010 01111 0000000000000100 000000 11111 00000 0000000000001000

Input Device Inputs Object Code
Processor
Control
Datapath
Memory
Devices
Input
Output
000000 00000 00101 0001000010000000 000000 00100 00010 0001000000100000 100011 00010 01111 0000000000000000 100011 00010 10000 0000000000000100 101011 00010 10000 0000000000000000 101011 00010 01111 0000000000000100 000000 11111 00000 0000000000001000

Object Code Stored in Memory
Processor
Control
Datapath
MemoryDevices
Input
Output
000000 00000 00101 0001000010000000000000 00100 00010 0001000000100000100011 00010 01111 0000000000000000100011 00010 10000 0000000000000100101011 00010 10000 0000000000000000101011 00010 01111 0000000000000100000000 11111 00000 0000000000001000

Processor Fetches an Instruction
Processor
Control
Datapath
MemoryDevices
Input
Output
000000 00000 00101 0001000010000000000000 00100 00010 0001000000100000100011 00010 01111 0000000000000000100011 00010 10000 0000000000000100101011 00010 10000 0000000000000000101011 00010 01111 0000000000000100000000 11111 00000 0000000000001000
Processor fetches an instruction from memory
Where does it fetch from?

Control Decodes the Instruction
Processor
Control
Datapath
Memory
Devices
Input
Output
000000 00100 00010 0001000000100000
Control decodes the instruction to determine what to execute

Datapath Executes the Instruction
Processor
Control
Datapath
Memory
Devices
Input
Outputcontents Reg #4 ADD contents Reg #2results put in Reg #2
Datapath executes the instruction as directed by control
000000 00100 00010 0001000000100000

Processor Organization
Control needs to have the Ability to input instructions from memory
Logic and means to control instruction sequencing
Logic and means to issue signals that control the way information flows between datapath components
Logic and means to control what operations the datapath’s functional units perform
Datapath needs to have the Components - functional units (e.g., adder) and storage
locations (e.g., register file) - needed to execute instructions
Components interconnected so that the instructions can be accomplished
Ability to load data from and store data to memory
Where does it load and store from and to?

What Happens Next?
Processor
Control
Datapath
MemoryDevices
Input
Output
000000 00000 00101 0001000010000000000000 00100 00010 0001000000100000100011 00010 01111 0000000000000000100011 00010 10000 0000000000000100101011 00010 10000 0000000000000000101011 00010 01111 0000000000000100000000 11111 00000 0000000000001000
Fetch
DecodeExec

Output Data Stored in Memory
Processor
Control
Datapath
MemoryDevices
Input
Output000001000101000000000000000000000000000001001111000000000000010000000011111000000000000000001000
At program completion the data to be output resides in memory

Output Device Outputs Data
Processor
Control
Datapath
Memory
Devices
Input
Output
000001000101000000000000000000000000000001001111000000000000010000000011111000000000000000001000

The Instruction Set Architecture
instruction set architecture
software
hardware
The interface description separating the software and hardware.
Stopped here 1/19

MIPS R3000 Instruction Set Architecture
Instruction Categories Load/Store Computational Jump and Branch Floating Point
- coprocessor
Memory Management Special
R0 - R31
PCHI
LO
OP
OP
OP
rs rt rd sa funct
rs rt immediate
jump target
3 Instruction Formats: all 32 bits wide
Registers
Q: How many already familiar with MIPS ISA?


![CS35101 Computer Architecture Spring 2006 Week 8 P Durand (durand) [Adapted from MJI (mji)] [Adapted from Dave Patterson’s.](https://static.fdocuments.in/doc/165x107/56649eab5503460f94bb0645/cs35101-computer-architecture-spring-2006-week-8-p-durand-wwwcskentedudurand.jpg)















