
CS 526: Computer Graphics II University of Illinois at Chicago “Probabilistic Surfaces: Point...
34
CS 526: Computer Graphics II University of Illinois at Chicago “Probabilistic Surfaces: Point Based Primitives to Show Surface Uncertainty” Authors: Gevorg Grigoryan and Penny Rheingans Presented by: Allan Spale, Spring 2004
-
Upload
belinda-maxwell -
Category
Documents
-
view
216 -
download
0
Transcript of CS 526: Computer Graphics II University of Illinois at Chicago “Probabilistic Surfaces: Point...
CS 526: Computer Graphics II University of Illinois at Chicago
“Probabilistic Surfaces:Point Based Primitives
to Show Surface Uncertainty”
Authors: Gevorg Grigoryan and Penny Rheingans
Presented by: Allan Spale, Spring 2004

CS 526: Computer Graphics II University of Illinois at Chicago
Uncertainty Is Inevitable
• Technical fields have measurements with an amount of uncertainty– Example: 25 mm +/- 2 mm
• Visualizations require a merging of the main data being displayed in addition to the uncertainty values– Especially crucial when decision-making must
be done by users of the visualization

CS 526: Computer Graphics II University of Illinois at Chicago
Traditional Uncertainty Visualization
• Examples– Vertical bars on bar graphs– Probability density curves and surfaces– Adjacent displays of data and its uncertainty
• Problem– Does not scale well to multidimensional data
1 2

CS 526: Computer Graphics II University of Illinois at Chicago
Uncertainty Visualization:Discrete Points
• Examples– Glyphs [12,16]; sonification (sound used to
convey data) [7, 9, 11]; discrete point distribution [14]; procedural annotation [2]
• Advantage– Useful sampling
• Disadvantage– Using discrete points limits its application to
continuous domains

CS 526: Computer Graphics II University of Illinois at Chicago
Uncertainty Visualization:Pseudo-coloring
• Example– Coloring a mountain range to show the likelihood of an
avalanche or mud slide
• Advantage– Uncertainty displayed continuously
• Disadvantages– Uncertainty relates to a variable, not to a single point
or group of points– Disconnect between uncertainty and geometry
• Further reading in [17]
CS 526: Computer Graphics II University of Illinois at Chicago
Uncertainty Visualization:Geometry Modification
• Examples– Fat surfaces (surfaces with thickness) [1, 12]– Displaced/perturbed geometry [10, 12]; – Animation [4], – IFS (iterated function system) fractal interpolation [18]
• Advantages– Fat surfaces: illustrate potential range of data point locations– Animation: easy to detect uncertainty– Fractals: good for introducing geometric variability
• Disadvantages– Animation: not printable to paper, motion distracts from other
variables
CS 526: Computer Graphics II University of Illinois at Chicago
Uncertainty Visualization:Probabilistic Surfaces
• Application– MRI of brain showing probabilities of cancerous
tumor boundaries
• Requirements to be successful– Information about both surface geometry and
regional uncertainty– Intuitive and not distracting– Display of other variables in addition to
uncertainty

CS 526: Computer Graphics II University of Illinois at Chicago
Tumor Growth Model:General Information
• Gompertz model [15]: V(t) = V(0) exp( A/B ( 1 – exp( -Bt ) ) )
– Parameters• V(0): initial volume of tumor at time t = 0• A, B: tumor growth parameters
– Trends
• t (as t approaches infinity):
– A/B = final tumor size– B = rate of initial growth
– Used to build a large tumor from small tumors dispersed in a region
CS 526: Computer Graphics II University of Illinois at Chicago
Tumor Growth Model:Uncertainty
• Uncertainty equation:V(t))/t = V(0) exp( A/B ( 1 – exp( -Bt ) ) ) A exp( -Bt )
= V(t) A exp( -Bt )
– Equation information• Growth rate proportional to current tumor volume
and an exponentially decaying term• Inverse proportionality between cell density and
uncertainty – High cell density low uncertainty

CS 526: Computer Graphics II University of Illinois at Chicago
Tumor Growth Model:Uncertainty
• Uncertainty equation: V(t))/t = V(0) exp( A/B ( 1 – exp( -Bt ) ) ) A exp( -Bt )
= V(t) A exp( -Bt )
– Equation information
• t (as t approaches infinity):
– Uncertainty 0– Growth rate 0 – Tumor reaches a constant volume

CS 526: Computer Graphics II University of Illinois at Chicago
Tumor Growth Model:Metastasis
• Description– As cancer develops, cells separate from tumor– Cells travel in blood vessels and settle in a new
place
• Parameter in the growth model– At an increasing time interval t, tumor size
increases• At some size threshold, metastasis occurs• New tumor center created at a random distance from
the origin in the direction of the blood vessel flow
– Output as age along with an uncertainty value
CS 526: Computer Graphics II University of Illinois at Chicago
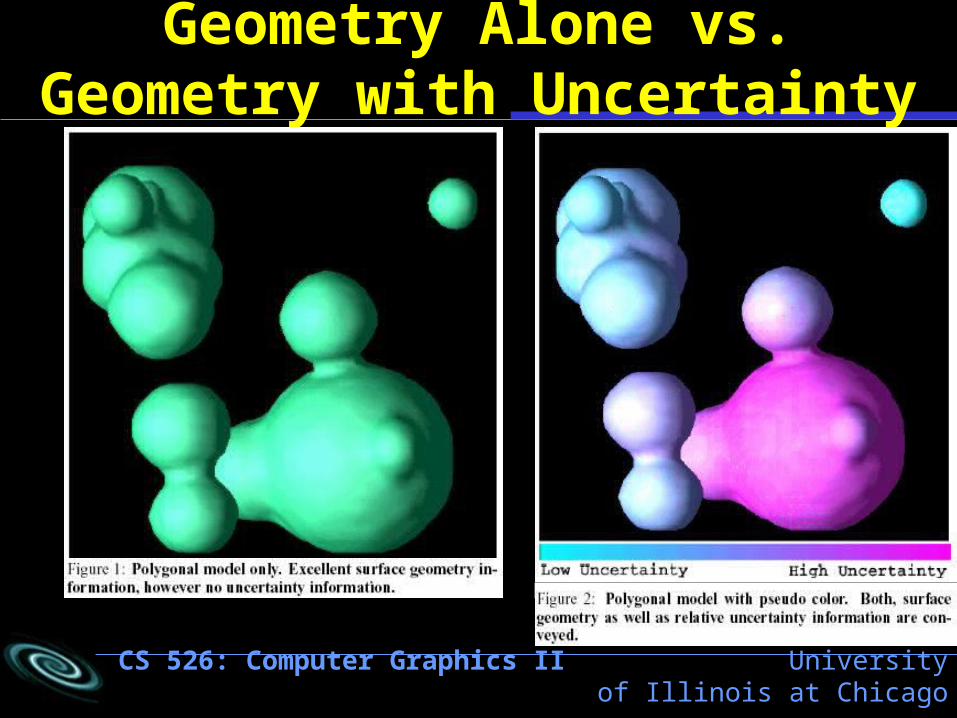
Geometry Alone vs.Geometry with Uncertainty

CS 526: Computer Graphics II University of Illinois at Chicago
Approach toUncertainty Points
• For each surface point, displace it along the surface normal of the point– Point displacement is proportional to the point’s
uncertainty value
• Reasons to use points instead of polygons– Levoy & Whitted (1985) pioneered the use of
points as display primitives (paper reference [8])– Increasing scene complexity reduces algorithm
design complexity– Do not have to consider surfaces at polygons
CS 526: Computer Graphics II University of Illinois at Chicago
Improved Approach toUncertainty Points
• Transparency is appropriate for displaying uncertainty
• High uncertainty high transparency
• Result– Highly uncertain regions will contain points with
blurriness and large displacements

CS 526: Computer Graphics II University of Illinois at Chicago
Implementation:Initialization
1. Read in surface and uncertainty information (polygon mesh with uncertainty data at vertices – uncertainty values between 0 and 1)
• Note: The text for all implementation steps are directly quoted from the paper.
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y
CS 526: Computer Graphics II University of Illinois at Chicago
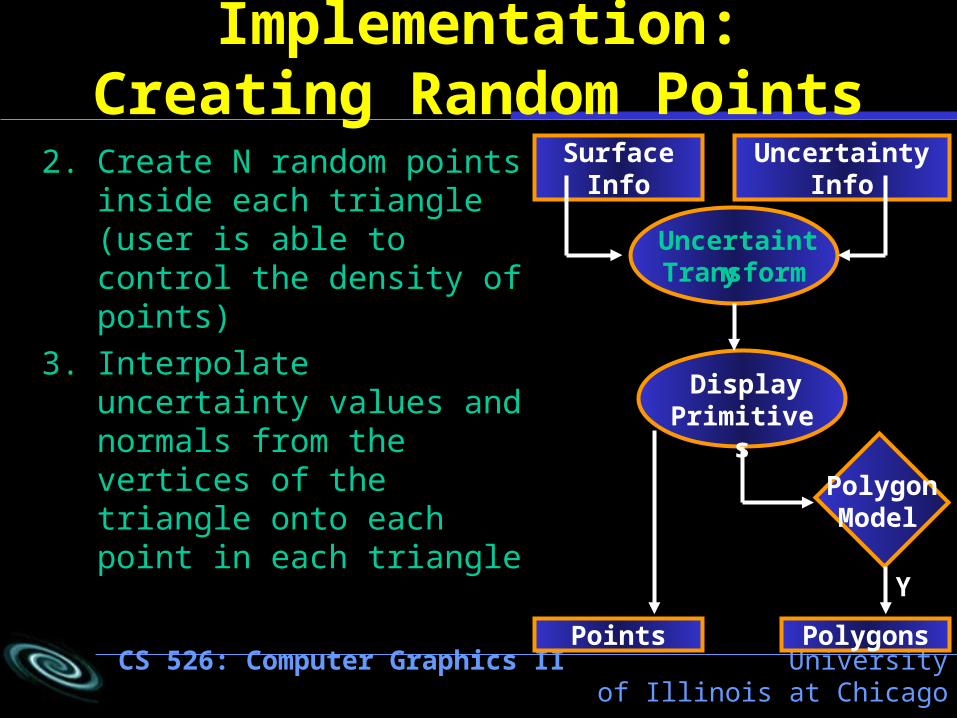
Implementation:Creating Random Points
2. Create N random points inside each triangle (user is able to control the density of points)
3. Interpolate uncertainty values and normals from the vertices of the triangle onto each point in each triangle
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y

CS 526: Computer Graphics II University of Illinois at Chicago
Implementation:Calculating Displacement
4. For each point P do…5. Calculate the
displacement:disp = rand( )
* ( uncertainty at P )a * ( scale factor )
• rand() returns a random number between the values of 0 and 1
• a and scale factor are controlled by the user
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y

CS 526: Computer Graphics II University of Illinois at Chicago
Implementation: Point Displacement & Transparency
4. For each point P do…6. Displace P in the
direction of the normal at P
7. Calculate the transparency, alpha:alpha = 1 –
( uncertainty at P )b
• b is controlled by the user
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y
CS 526: Computer Graphics II University of Illinois at Chicago
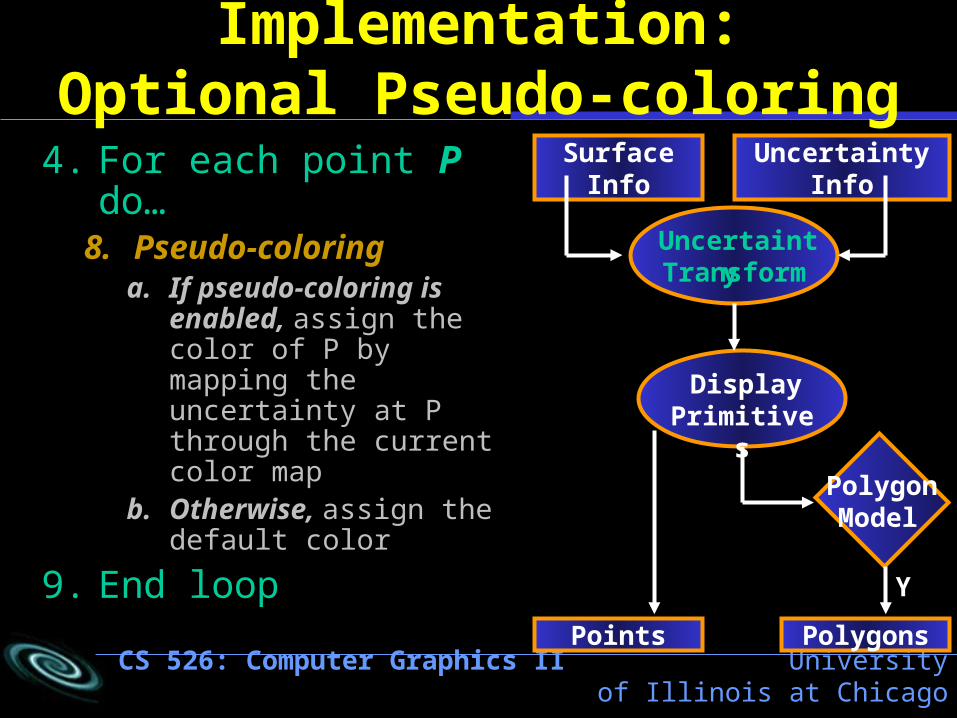
Implementation:Optional Pseudo-coloring
4. For each point P do…8. Pseudo-coloring
a. If pseudo-coloring is enabled, assign the color of P by mapping the uncertainty at P through the current color map
b. Otherwise, assign the default color
9. End loop
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y

CS 526: Computer Graphics II University of Illinois at Chicago
Implementation:Displaying the Primitives
10. Display all points
11. Polygons12. If polygonal model
usage is enabled, display all the polygons
Surface Info Uncertainty Info
Uncertainty Transform
DisplayPrimitives
Points Polygons
PolygonModel
Y

CS 526: Computer Graphics II University of Illinois at Chicago
Implementation: Results
• Simplest version– Certain and uncertain
areas are clearly displayed– The uncertainty area of the
tumor boundary is clearly defined
• Size of region proportional to level of uncertainty
– Best suited for interactive display
– Disadvantage• Artifacts; difficulty making
dense areas smooth
Uncertain Region
Certain Region

CS 526: Computer Graphics II University of Illinois at Chicago
Enhancement:Adding Polygonal Rendering
• Improving computational efficiency– Use point rendering for
uncertain areas– Use polygonal rendering
for certain areas regardless of its point density
• Advantages– Well-defined low
uncertainty areas– More pleasing to view
and more informative
Uncertain Region
Certain Region

CS 526: Computer Graphics II University of Illinois at Chicago
Enhancement:Adjusting Transparency
• Adjust transparency according to uncertainty level using the equation: = 1.0 – err c
• err : uncertainty value scaled from 0 to 1• c : rate that
transparency increases with uncertainty; constant value
Uncertain Region
Certain Region

CS 526: Computer Graphics II University of Illinois at Chicago
Reviewing Uncertainty Visualization Requirements
• Informative– Polygonal (certainty) and
point (uncertainty) rendering
• Intuitive/not distracting– Transparency value =
uncertainty value
• Additional information– Inclusion of tumor age
• Correlation between tumor age and uncertainty
• Seemingly contradictory items (blue, green arrows) remain valid for Equation 2
Young tumor; high uncertainty
Old tumor; high uncertainty
Young tumor; low uncertainty

CS 526: Computer Graphics II University of Illinois at Chicago
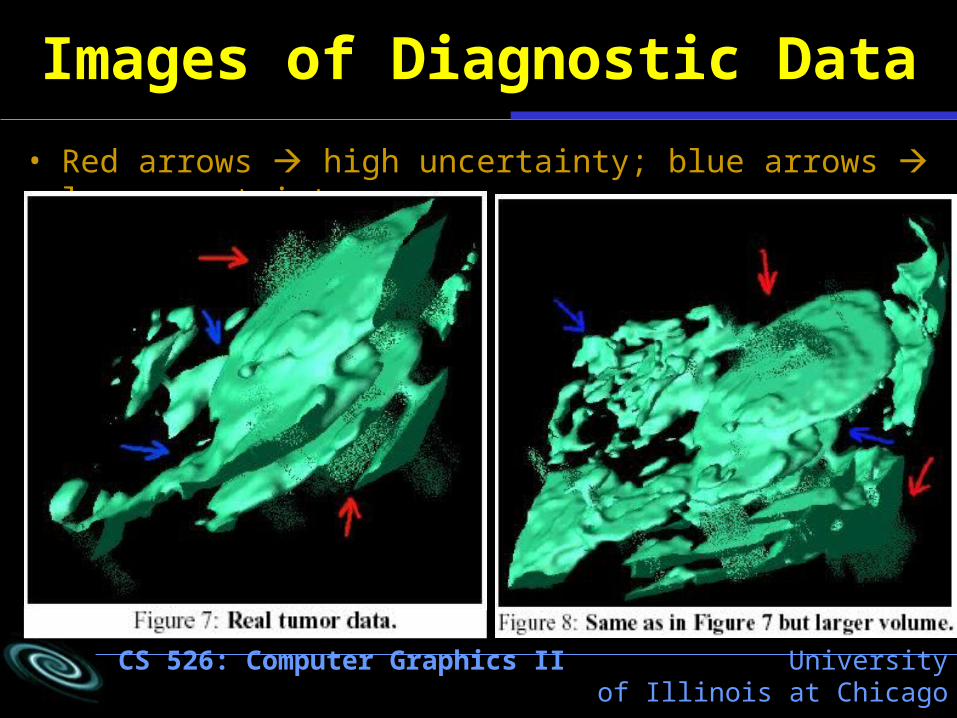
Application to Diagnostic Data
• Datasets of CAT scan of human kidney tumors• Creation of the visualization
– Input• Each point is in 3-D with a density value
– Output• Geometry: used isovalue of tumor density to create the
isosurface volume• Certainty: at the tumor surface, used inverse density gradient
– Results• High density gradient sharp border• Low density gradient “fuzzy” border• Certainty data coexists with geometry data• Scalable to larger datasets
CS 526: Computer Graphics II University of Illinois at Chicago
Images of Diagnostic Data
• Red arrows high uncertainty; blue arrows low uncertainty
CS 526: Computer Graphics II University of Illinois at Chicago
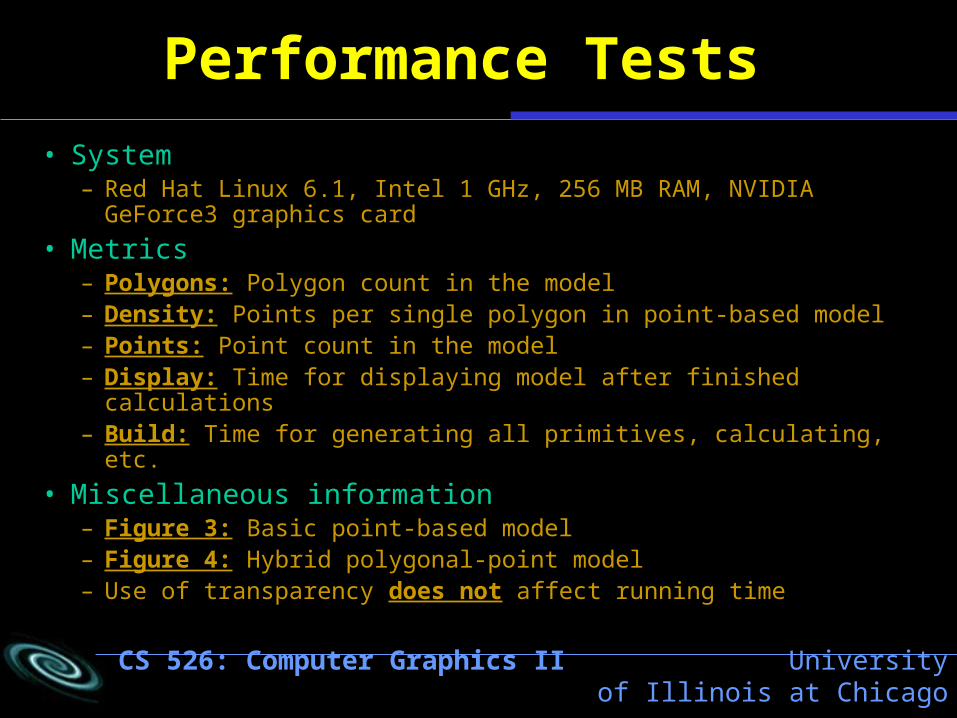
Performance Tests
• System– Red Hat Linux 6.1, Intel 1 GHz, 256 MB RAM, NVIDIA GeForce3
graphics card
• Metrics– Polygons: Polygon count in the model– Density: Points per single polygon in point-based model– Points: Point count in the model– Display: Time for displaying model after finished calculations– Build: Time for generating all primitives, calculating, etc.
• Miscellaneous information– Figure 3: Basic point-based model– Figure 4: Hybrid polygonal-point model– Use of transparency does not affect running time
CS 526: Computer Graphics II University of Illinois at Chicago
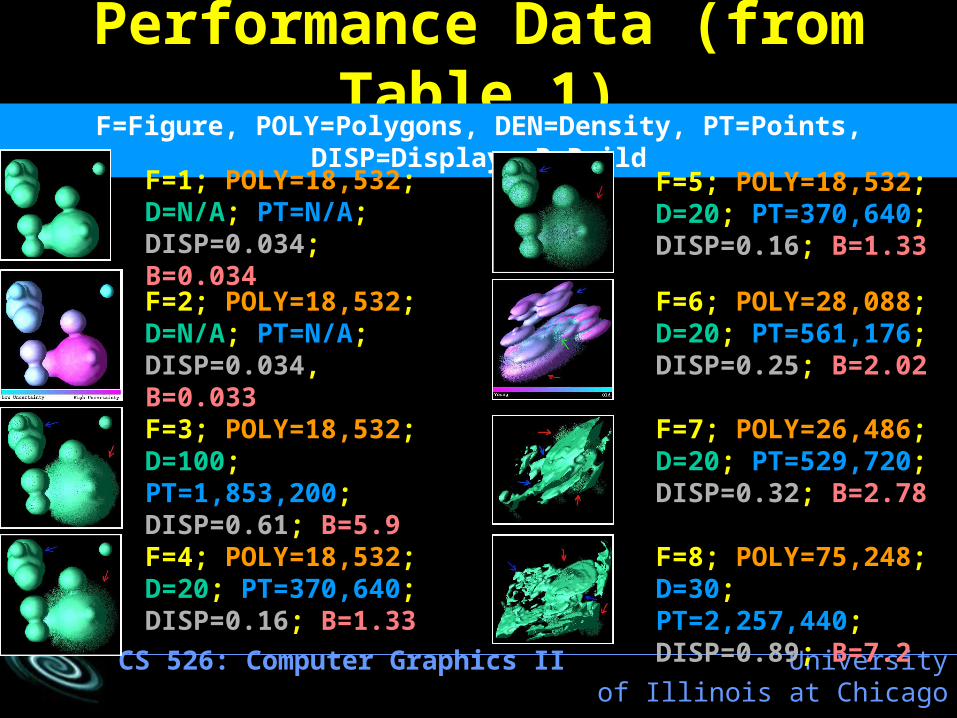
Performance Data (from Table 1)F=Figure, POLY=Polygons, DEN=Density, PT=Points, DISP=Display, B=Build
F=1; POLY=18,532; D=N/A; PT=N/A; DISP=0.034; B=0.034
F=2; POLY=18,532; D=N/A; PT=N/A; DISP=0.034, B=0.033
F=3; POLY=18,532; D=100; PT=1,853,200; DISP=0.61; B=5.9
F=4; POLY=18,532; D=20; PT=370,640; DISP=0.16; B=1.33
F=8; POLY=75,248; D=30; PT=2,257,440; DISP=0.89; B=7.2
F=7; POLY=26,486; D=20; PT=529,720; DISP=0.32; B=2.78
F=6; POLY=28,088; D=20; PT=561,176; DISP=0.25; B=2.02
F=5; POLY=18,532; D=20; PT=370,640; DISP=0.16; B=1.33

CS 526: Computer Graphics II University of Illinois at Chicago
Summary & Future Work
• Point-based model for uncertainty visualization is successful– Geometry and uncertainty data can coexist– Adding polygonal mesh increases run-time
efficiency– Use of transparency creates an intuitive model
• Future improvements– More parameters to display uncertainty
• Specular coefficient• Refractive index
CS 526: Computer Graphics II University of Illinois at Chicago
Thanks for listening

CS 526: Computer Graphics II University of Illinois at Chicago
Paper References[1] R.E. Barnhill, K. Opitz, and H. Pottmann. Fat surfaces: A trivariate approach to triangle-based interpolation on
surfaces. Computer Aided Geometric Design, 9(5):365–378, 1992.
[2] Andrej Cedilnik and Penny Rheingans. Procedural annotation of uncertain information. In Proceedings of IEEE Visualization ’00, pages 77–84. IEEE, 2000.
[3] Baoquan Chen and Minh Xuan Nguyen. POP: A hybrid point and polygon rendering system for large data. In Proceedings of Visualization 2001, pages 45–52. IEEE, 2001.
[4] C.R. Ehlschlaeger, A.M. Shortridge, and M.F. Goodchild. Visualizing spatial data uncertainty using animation. Computers in GeoSciences, 23(4):387–395, 1997.
[5] Markus Gross. Are points the better graphics primitives? Computer Graphics Forum, 20(3), 2001.
[6] A.R. Kansal, S. Torquato, G.R.IV Harsh, E.A. Chiocca, and T.S. Deisboeck. Simulated brain tumor growth dynamics using a three-dimensional cellular automaton. Journal of Theoretical Biology, 203:367–382, 2000.
[7] Gregory Kramer. Auditory Display, Sonification, Audification, and Auditory Interfaces, pages 1–78. Addison-Wesley, 1994.
[8] Marc Levoy and Turner Whitted. The use of points as a display primitive. Technical Report 85-022, University of North Carolina at Chapel Hill, January 1985.
[9] S. K. Lodha, C. M. Wilson, and R. E. Sheehan. LISTEN: sounding uncertainty visualization. In Proceedings of Visualization 96, pages 189–195. IEEE, 1996.
CS 526: Computer Graphics II University of Illinois at Chicago
Paper References[10] Suresh Lodha, Robert Sheehan, Alex Pang, and Craig Wittenbrink. Visualizing geometric uncertainty of surface
interpolants. In Proceedings of Graphics Interface, pages 238– 245, May 1996.
[11] R. Minghim and A.R. Forrest. An illustrated analysis of sonification for scientific visualization. In Proceedings of Visualization 95, pages 110–117. IEEE, 1995.
[12] A. T. Pang, C. M. Wittenbrink, and S. K. Lodha. Approaches to uncertainty visualization. The Visual Computer, 13(8):370 – 390, 1997.
[13] Hanspeter Pfister and Jeroen van Baar. Surfels: Surface elements as rendering primitives. In Kurt Akele, editor, Proceedings of SIGGRAPH 2000, pages 335–342. ACM SIGGRAPH, Addison Wesley Longman, July 2000.
[14] P. Rheingans and S. Joshi. Visualization of molecules with positional uncertainty. In E. Gr¨oller, H. L¨offelmann, and W. Ribarsky, editors, Data Visualization ’99, pages 299–306. Springer-Verlag Wien, 1999.
[15] G.G. Steel. Growth Kinetics of Tumors. Oxford: Clarendon Press, 1977.
[16] C. M. Wittenbrink, A. T. Pang, and S.K. Lodha. Glyphs for visualizing uncertainty in vector fields. IEEE Transactions on Visualization and Computer Graphics, 2(3):226–279, 1996.
[17] C.M. Wittenbrink, A.T. Pang, and S. Lodha. Verity visualization: Visual mappings. Technical Report UCSC-CRL-95-48, University of California Santa Cruz, 1995.
[18] Craig M. Wittenbrink. IFS fractal interpolation for 2D and 3D visualization. In Proceedings to Visualization ’95, pages 77–84. IEEE, October – November 1995.

CS 526: Computer Graphics II University of Illinois at Chicago
Credits and References
• Non-paper sources• Microsoft Excel 2000, Help: “Error bars in charts”• Microsoft Excel 2000, Help: “Examples of Chart Types: XY
Scatter”• Paper sources
• All images labeled “figure”• Internet
• IFS: http://www.cse.ucsc.edu/research/slvg/ifs.html• Fat Surfaces: http://www.ticam.utexas.edu/reports/1999/9908.pdf

CS 526: Computer Graphics II University of Illinois at Chicago
Questions and Comments


















