
Creative Commons Deed 0 1 - La Salle · Creative Commons License Deed Reconeixement-No...
335
LaSalleOnLine ENGINYERIES ÀLGEBRA LINEAL Guia d’estudi José Antonio Montero, Santiago Planet, Joan Claudi Socoró, Fco. Javier Pajares i Oscar Garcia A A A n n n 2 3 1 0 0 1 1 1 0 1 1 1 1 2 0 1 ( ) ( ) 2010 Creative Commons Deed
-
Upload
duongduong -
Category
Documents
-
view
220 -
download
0
Transcript of Creative Commons Deed 0 1 - La Salle · Creative Commons License Deed Reconeixement-No...

LaSa
lle
On
Lin
e
EN
GIN
YER
IES
ÀLGEBRA LINEAL
Guia d’estudi José Antonio Montero, Santiago Planet, Joan Claudi Socoró, Fco. Javier Pajares i Oscar Garcia
A A An
n
n
2 31 0
0 1
1 1
0 1
11 1
20 1
( )
( )
2010 Creative Commons Deed


Creative Commons License Deed Reconeixement-No comercial-Sense obres derivades 3.0 Espanya
Vostè és lliure de: Copiar, distribuir i comunicar públicament l’obra.
Sota els següents condicionants:
Reconeixement.
S’ha de referenciar aquesta obra a José Antonio Montero, Santiago Planet, Joan Claudi Socoró, Francisco Javier Pajares i Oscar García -
Enginyeria La Salle (Semipresencial) No comercial.
No es pot utilitzar aquesta obra per a finalitats comercials.
Sense obres derivades. No es pot alterar, transformar o generar una obra derivada a partir d’aquesta.
Quan reutilitzeu o distribuïu l'obra, heu de deixar ben clar els termes
de la llicència de l'obra.
Alguna d'aquestes condicions pot no aplicar-se si obteniu el permís
del titular dels drets d'autor.
No hi ha res en aquesta llicència que menyscabi o restringeixi els drets morals de l'autor.
Els drets derivats d'usos legítims o altres limitacions reconegudes per llei no queden afectats per l'anterior
Això és un resum fàcilment llegible del text legal (la llicència completa) disponible en els
idiomes següents: Català Castellà Basc Gallec


Crèdits
Autor: José Antonio Montero, Santiago Planet, Joan Claudi Socoró, Francisco
Javier Pajares i Oscar García
Editor: Lluís Vicent
Coordinació lingüística: Sara Laso
Revisió lingüística: Maido Pérez Altava
Maquetació: Víctor Ballesteros
Disseny de portada: Víctor Ballesteros
Aquesta edició ha comptat amb el suport de l’Agència de Gestió d’Ajuts Universitaris i de Recerca (AGAUR) de la Generalitat de
Catalunya en la Convocatòria d’ajuts a l’edició i la difusió de llibres de text o manuals universitaris i llibres cientificotècnics, en suport
paper o en suport electrònic, escrits en llengua catalana (DILL 2010)
ISBN: 978-84-937712-7-0


1
Índex
SESSIÓ 1: Matrius i determinants .............................................................................. 7
1. Matrius i determinants ......................................................................................... 7
1.1. Operacions bàsiques amb matrius i tipus de matrius .................................................. 7 1.1.1. Operacions bàsiques amb matrius i propietats ......................................................................... 7 1.1.2. Tipus de matrius ........................................................................................................................ 8
1.2. Concepte de determinant i propietats ........................................................................ 9 1.2.1. Concepte de determinant .......................................................................................................... 9 1.2.2. Propietats dels determinants .................................................................................................. 10
1.3. Càlcul del determinant per adjunts .......................................................................... 11
1.4. Rang d’una matriu ................................................................................................... 12
1.5. Inversa d’una matriu ............................................................................................... 13
SESSIÓ 2: Exercicis de determinants i de matrius ..................................................... 15
1.6. Exercicis .................................................................................................................. 15 1.6.1. Exercicis resolts ........................................................................................................................ 15 1.6.2. Exercicis proposats .................................................................................................................. 19
SESSIÓ 3: Estudi de sistemes d’equacions lineals ..................................................... 23
2. Estudi i resolució de sistemes d’equacions lineals ................................................ 23
2.1. Representació d’un sistema d’equacions lineals ....................................................... 23
2.2. Estudi d’un sistema d’equacions lineals .................................................................... 25 2.2.1. Tipus de sistemes d’equacions lineals ..................................................................................... 25 2.2.2. Teorema de Rouché-Frobenius ................................................................................................ 25
2.3. Exercicis d’estudi de sistemes d’equacions lineals .................................................... 26 2.3.1. Exercicis resolts ........................................................................................................................ 26 2.3.2. Exercicis proposats .................................................................................................................. 29
SESSIÓ 4: Mètodes de resolució de sistemes d’equacions lineals .............................. 31
2.4. Mètodes de resolució de sistemes d’equacions lineals .............................................. 31 2.4.1. Regla de Cramer....................................................................................................................... 32 2.4.2. Mètode de la matriu inversa ................................................................................................... 34 2.4.3. Mètodes de Gauss-Jordan i de Gauss ...................................................................................... 35 2.4.4. Resolució conjunta de sistemes d’equacions lineals similars .................................................. 36
SESSIÓ 5: Exercicis d’estudi i resolució de sistemes d’equacions lineals .................... 39
2.5. Exercicis .................................................................................................................. 39 2.5.1. Exercicis resolts ........................................................................................................................ 39 2.5.2. Exercicis proposats .................................................................................................................. 51
SESSIÓ 6: Definició d’espai vectorial ........................................................................ 53
3. Espais vectorials ................................................................................................. 53
3.1. Estructures algebraiques bàsiques i definició d’espai vectorial .................................. 53 3.1.1. Estructures algebraiques bàsiques .......................................................................................... 53 3.1.2. Definició d’espai vectorial ........................................................................................................ 55

2
3.1.3. Exemples d’espais vectorials ................................................................................................... 57
SESSIÓ 7: Independència lineal de vectors i concepte de subespai vectorial ............. 63
3.2. Dependència i independència lineal de vectors ........................................................ 63 3.2.1. Definició: combinació lineal ..................................................................................................... 63 3.2.2. Definició: conjunt de vectors linealment independents .......................................................... 64 3.2.3. Exemples .................................................................................................................................. 65
3.3. Subespai vectorial ................................................................................................... 69 3.3.1. Definició de subespai vectorial ................................................................................................ 69 3.3.2. Exemples .................................................................................................................................. 70
3.4. Subespai engendrat ................................................................................................. 71 3.4.1. Definició de subespai engendrat ............................................................................................. 71 3.4.2. Exemples .................................................................................................................................. 72
SESSIÓ 8: Exercicis de subespais vectorials i de dependència i independència lineal de vectors ................................................................................................................... 75
3.5. Exercicis .................................................................................................................. 75 3.5.1. Exercicis resolts ........................................................................................................................ 75 3.5.2. Exercicis proposats .................................................................................................................. 77
SESSIÓ 9: Base i dimensió d’un espai vectorial i concepte de components d’un vector en una base ............................................................................................................ 81
3.6. Base i dimensió d’un espai vectorial ......................................................................... 81 3.6.1. Base d’un espai vectorial ......................................................................................................... 81 3.6.2. Dimensió d’un espai vectorial .................................................................................................. 83
3.7. Components d’un vector de E en una base B de E ..................................................... 84
SESSIÓ 10: Canvis de base ....................................................................................... 89
3.8. Canvis de base ......................................................................................................... 89 3.8.1. Introducció ............................................................................................................................... 89 3.8.2. Matriu de canvi de base........................................................................................................... 90
SESSIÓ 11: Exercicis de vectors expressats en components i de canvis de base ......... 95
3.9. Exercicis de vectors en components i de canvis de base ............................................ 95 3.9.1. Exercicis resolts ........................................................................................................................ 95 3.9.2. Exercicis proposats ................................................................................................................ 105
SESSIÓ 12: Exercicis del capítol 3 ........................................................................... 109
3.10. Exercicis .............................................................................................................. 109 3.10.1. Exercicis resolts .................................................................................................................... 109 3.10.2. Exercicis proposats .............................................................................................................. 118
SESSIÓ 13: Primera visita a l’aplicació ALGTEC ...................................................... 121
3.11. Primera visita a l’aplicació ALGTEC ....................................................................... 122 3.11.1. Presentació d’ALGTEC .......................................................................................................... 122 3.11.2. Aplicacions d’ALGTEC que fan servir els conceptes tractats als tres primers capítols del curs ......................................................................................................................................................... 122
SESSIÓ 14: Aplicació lineal, definició i propietats ................................................... 125
4. Aplicacions lineals............................................................................................. 125

3
4.1. Concepte d’aplicació lineal, definició i propietats ................................................... 125 4.1.1. Definició d’aplicació lineal ..................................................................................................... 125 4.1.2. Propietats............................................................................................................................... 127 4.1.3. Exercicis proposats ................................................................................................................ 128
SESSIÓ 15: Més definicions associades a aplicacions lineals ................................... 131
4.2. Subespai nucli d’una aplicació lineal ...................................................................... 131 4.2.1. Definició ................................................................................................................................. 131 4.2.2. Exemples ................................................................................................................................ 132
4.3. Subespai imatge d’una aplicació lineal ................................................................... 133 4.3.1. Definició ................................................................................................................................. 133 4.3.2. Exemples ................................................................................................................................ 133
4.4. Altres proposicions i definicions ............................................................................. 135 4.4.1. Proposició 1 ........................................................................................................................... 135 4.4.2. Proposició 2 ........................................................................................................................... 136 4.4.3. Monomorfismes, epimorfismes i isomorfismes .................................................................... 136 4.4.4. Proposició 3 ........................................................................................................................... 137 4.4.5. Rang de la matriu associada a una aplicació lineal ................................................................ 137 4.4.6. Aplicació inversa .................................................................................................................... 137 4.4.7. Exercici Aquest exercici s’ha de lliurar ............................................................................... 138
SESSIÓ 16: Matriu associada a una aplicació lineal ................................................ 139
4.5. Matriu associada a una aplicació lineal .................................................................. 139 4.5.1. Deducció ................................................................................................................................ 139 4.5.2. Matriu associada a l’aplicació inversa d’una aplicació lineal bijectiva .................................. 141 4.5.3. Exemples ................................................................................................................................ 142
SESSIÓ 17: Composició d’aplicacions lineals .......................................................... 147
4.6. Composició d’aplicacions lineals ............................................................................ 147 4.6.1. Definició ................................................................................................................................. 147 4.6.2. Matriu associada a la composició d’aplicacions lineals ......................................................... 148 4.6.3. Exercici d’exemple ................................................................................................................. 149
SESSIÓ 18: Exercicis resolts corresponents al capítol 4 ........................................... 155
4.7. Exercicis ................................................................................................................ 155 4.7.1. Exercicis resolts ...................................................................................................................... 155
SESSIÓ 19: Exercicis proposats corresponents al capítol 4 ...................................... 177
4.7.2. Exercicis proposats ............................................................................................. 177
SESSIÓ 20: Aplicacions d’ALGTEC que fan servir conceptes relacionats amb les aplicacions lineals…………………………………………………………………………………………………183
4.8. Aplicacions d’ALGTEC que fan servir els conceptes tractats al capítol 4 ................... 183 4.8.1. L’àlgebra al món dels gràfics per ordinador .......................................................................... 183 4.8.2. Composició d’aplicacions lineals en la generació d’ombres d’objectes 3D ........................... 184
SESSIÓ 21: Introducció als endomorfismes i als conceptes de valor i de vector propi ............................................................................................................................ 185
5. Diagonalització d’endomorfismes ..................................................................... 185
5.1. Introducció ............................................................................................................ 185 5.1.1. Definició ................................................................................................................................. 186

4
5.1.2. Plantejament del problema ................................................................................................... 186
5.2. Subespai invariant ................................................................................................. 187
5.3. Vector propi i valor propi ....................................................................................... 187 5.3.1. Definició ................................................................................................................................. 188 5.3.2. Proposició 1 ........................................................................................................................... 188 5.3.3. Proposició 2 ........................................................................................................................... 188 5.3.4. Exemples ................................................................................................................................ 189
SESSIÓ 22: Polinomi característic i concepte de diagonalització ............................. 191
5.4. Polinomi característic ............................................................................................ 191 5.4.1. Definició ................................................................................................................................. 191 5.4.2. Proposició .............................................................................................................................. 192 5.4.3. Exemples ................................................................................................................................ 193
5.5. Diagonalització ...................................................................................................... 195 5.5.1. Introducció ............................................................................................................................. 195 5.5.2. Proposició 1 ........................................................................................................................... 196 5.5.3. Proposició 2 ........................................................................................................................... 196 5.5.4. Teorema 1 .............................................................................................................................. 197 5.5.5. Teorema 2 .............................................................................................................................. 197
SESSIÓ 23: Exercicis de diagonalització ................................................................. 199
5.6. Exercicis ................................................................................................................ 199 5.6.1. Exercicis resolts ...................................................................................................................... 199 5.6.2. Exercicis proposats ................................................................................................................ 203
SESSIÓ 24: Teorema de Cayley-Hamilton i aplicacions de la diagonalització de matrius ............................................................................................................................ 207
5.7. Teorema de Cayley-Hamilton. Aplicació a la inversió de matrius. ............................ 207 5.7.1. Definició ................................................................................................................................. 207 5.7.2. Exemple ................................................................................................................................. 208 5.7.3. Aplicació en la inversió de matrius ........................................................................................ 209
5.8. Aplicacions de la diagonalització en la reducció de càlculs necessaris ...................... 210 5.8.1. Càlcul de potències ................................................................................................................ 210 5.8.2. Càlcul d’un polinomi avaluat per una matriu......................................................................... 210 5.8.3. Càlcul de l’arrel quadrada d’una matriu ................................................................................ 211 5.8.4. Exemple ................................................................................................................................. 211
5.9. Exemple desenvolupat a l’aplicació ALGTEC: Aplicació de la diagonalització de matrius en un estudi de mercat ................................................................................................ 212
SESSIÓ 25: Problemes resolts ................................................................................ 215
5.10. Exercicis .............................................................................................................. 215 5.10.1. Exercicis resolts .................................................................................................................... 215
SESSIÓ 26: Problemes proposats ........................................................................... 237 5.10.2. Problemes proposats ........................................................................................................... 237
SESSIÓ 27: Exercici de modelització ....................................................................... 245
5.11. Exercici de modelització ....................................................................................... 245 5.11.1 Enunciat ................................................................................................................................ 245 5.11.2. Qüestions orientatives i per reflexionar .............................................................................. 246 5.11.3. Estructura i contingut de l’informe que ha de presentar-se................................................ 246

5
5.11.4. Criteris que s’aplicaran en l’avaluació de l’informe presentat ............................................ 247
SESSIÓ 28: Introducció a la descomposició en valors singulars (SVD, Singular Value Decomposition) .................................................................................................... 249
5.12. Descomposició en valors singulars (SVD) .............................................................. 249 5.12.1. Introducció ........................................................................................................................... 249 5.12.2. Com es calculen les matrius U, Σ i V .................................................................................... 250
SESSIÓ 29: Interpretació i aplicacions de la SVD .................................................... 253 5.12.3. Interpretació i aplicacions de la SVD ................................................................................... 253 5.12.4. Exemple numèric ................................................................................................................. 255
SESSIÓ 30: Definició de producte escalar ............................................................... 257
6. Espais vectorials euclidians i unitaris ................................................................. 257
6.1. Producte escalar. Espai euclidià i espai unitari. ....................................................... 257 6.1.1. Definició de producte escalar ................................................................................................ 257 6.1.2. Altres propietats .................................................................................................................... 259 6.1.3. Exemples ................................................................................................................................ 259 6.1.4. Espai vectorial euclidià i espai vectorial unitari ..................................................................... 263
SESSIÓ 31: Conceptes de norma d’un vector i d’angle entre vectors ....................... 265
6.2. Norma d’un vector ................................................................................................ 265 6.2.1. Definició ................................................................................................................................. 265 6.2.2. Norma induïda a partir del producte escalar ......................................................................... 266 6.2.3. Exemples de norma ............................................................................................................... 269 6.2.4. Normalització d’un vector respecte d’una norma donada .................................................... 269
6.3. Angle entre dos vectors ......................................................................................... 270 6.3.1 Definició .................................................................................................................................. 270 6.3.2. Exemple ................................................................................................................................. 271
SESSIÓ 32: Ortogonalitat i subespais ortogonals ................................................... 273
6.4. Ortogonalitat i subespais ortogonals ...................................................................... 273 6.4.1. Definició d’ortogonalitat ........................................................................................................ 273 6.4.2. Subespai ortogonal ................................................................................................................ 274 6.4.3. Altres definicions ................................................................................................................... 277 6.4.4. Relació entre ortogonalitat i independència lineal ................................................................ 277 6.4.5. Exemples ................................................................................................................................ 278
SESSIÓ 33: Projecció ortogonal ............................................................................. 281
6.5. Projecció ortogonal d’un vector sobre un altre vector ............................................. 281 6.5.1. Definició ................................................................................................................................. 281 6.5.2. Deducció del paràmetre c ...................................................................................................... 282
6.6. Projecció ortogonal d’un vector sobre un subespai vectorial de dimensió més gran que 1 .................................................................................................................................. 283
6.6.1. Deducció ................................................................................................................................ 283 6.6.2. Teorema ................................................................................................................................. 284 6.6.3. Observació ............................................................................................................................. 285
SESSIÓ 34: Exemples de projecció ortogonal i procés d’ortogonalització de Gram-Schmidt ................................................................................................................ 287
6.6.4 Exemples de projecció ortogonal ......................................................................... 287
6
6.7. Procés d’ortogonalització de Gram-Schmidt ........................................................... 290 6.7.1. Definició ................................................................................................................................. 290 6.7.2. Exemple ................................................................................................................................. 290
SESSIÓ 35: Aplicacions pràctiques d’alguns conceptes estudiats al tema 6 ............. 293
6.8. Aplicacions desenvolupades en ALGTEC en què s’apliquen conceptes estudiats al tema 6 .................................................................................................................................. 293
6.8.1. Aproximació d’un conjunt de punts per a una recta aplicant el criteri de mínims quadrats 293 6.8.2. Disseny del diagrama de blocs d’un desmodulador QPSK ..................................................... 294
SESSIÓ 36: Problemes resolts del capítol 6 ............................................................. 297
6.9. Exercicis ................................................................................................................ 297 6.9.1. Exercicis resolts ...................................................................................................................... 297
SESSIÓ 37: Problemes proposats del tema 6 .......................................................... 317 6.9.2. Exercicis proposats ................................................................................................................ 317
SESSIÓ 38: Exercici de modelització ....................................................................... 323
6.10. Exercici de modelització ....................................................................................... 323 6.10.1. Enunciat ............................................................................................................................... 323 6.10.2. Qüestions orientatives i per reflexionar .............................................................................. 326 6.10.3 Estructura i contingut de l’informe que ha de presentar-se................................................. 327 6.10.4 Criteris que s’aplicaran en l’avaluació de l’informe presentat ............................................. 327
Bibliografia .......................................................................................................... 329

7
SESSIÓ 1: Matrius i determinants
FITXA DE LA SESSIÓ Nombre: Matrius i determinants Tipus: teòrica Format: no presencial Duració: 5 hores Treball a entregar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS En aquesta sessió es repassaran les operacions bàsiques amb matrius i es presentaran els conceptes de determinant, de rang i de matriu inversa, així com la manera de fer el càlcul corresponent.
CONTINGUTS Al llarg de la sessió veurem com es fan les operacions bàsiques entre matrius, es definirà el concepte de determinant i les propietats que es poden aplicar per facilitar el seu càlcul, es definirà i es calcularà el rang d’una matriu, i finalitzarem la sessió definint el concepte de matriu inversa i presentant un mètode per calcular-la.
1. Matrius i determinants
1.1. Operacions bàsiques amb matrius i tipus de matrius
1.1.1. Operacions bàsiques amb matrius i propietats Denotem per Mnxm el conjunt de matrius de n files i m columnes. Els elements d’una matriu A Mnxm els expressem per aij, on i = 1, ..., n. En notació simbòlica aquesta matriu es representa per A = (aij), on j = 1, ..., m.

8
Suma de matrius
A a M
B b M
A B C c
ij nxm
ij nxm
ij
( )
( )
( ) on c = a + bij ij ij .
Propietats: - Associativa: (A + B) + C = A + (B + C) = A + B + C. - element neutre: N = (nij) on nij = 0. - element oposat: A’ = (a’ij) on a’ij = –aij.
Producte d’un escalar per una matriu
A a M
k p CkA B b
ij nxm
ij
( )
,( ) on b = kaij ij .
Propietats: - k(A + B) = kA + kB. - (k + p)A = kA + pA. - k(pA) = (kp)A.
Producte de matrius
m
1=kkjikij ·ba=con
)(·)()(
nxpij
mxpij
nxmij
McCBAMbBMaA
. Propietats: - Associativa: A·(B·C) = (A·B)·C. - Distributiva respecte de la suma:
o A·(B + C) = A·B + A·C. o (A + B)·C = A·C + B·C.
- No és commutativa A·B B·A.
1.1.2. Tipus de matrius Segons les seves característiques podem definir diferents tipus de matrius: A columna: A Mnx1.
9
A fila: A M1xm. A quadrada: A Mnxn. A transposada: la transposada de A Mnxm és AT = (aji) Mmxn i es forma canviant
files per columnes. A conjugada: la conjugada de A Mnxm és A* = (a*
ij) Mmxn i es forma conjugant els elements de A.
A hermítica: si A* = AT. A simètrica: si A = AT. A diagonal: si aij = 0 i j. A identitat: I Mnxn on aij = 0 i j i aij = 1 i = j. A inversa: la inversa de A Mnxm és A-1 que verifica que A·A-1 = A-1·A = I. A ortogonal: si A-1= AT. A regular: si det A 0. A singular: si det A = 0. A idempotent: si A2 = A. A triangular superior: si A Mnxn i aij = 0 i > j. A triangular inferior: si A Mnxn i aij = 0 i < j. A involutiva: si A2 = I.
1.2. Concepte de determinant i propietats
1.2.1. Concepte de determinant
El determinant d’una matriu quadrada A Mnxn és un únic nombre escalar K, cos commutatiu, que s’associa a A mitjançant una regla de càlcul:
det( )A
a a aa a a
a a a
n
n
n n nn
11 12 1
21 22 2
1 2
.
Casos particulars:
n = 1 a a11 11 .
n = 2 a aa a a a a a11 12
21 2211 22 21 12 .
n = 3
a a aa a aa a a
a a a a a a a a a a a a a a a a a a11 12 13
21 22 23
31 32 33
11 22 33 21 32 13 12 23 31 31 22 13 32 23 11 21 12 33 .

10
Que es coneix com la regla de Sarrus.
1.2.2. Propietats dels determinants Sigui
A
a a aa a a
a a a
C C C
n
n
n n nn
n
11 12 1
21 22 2
1 2
1 2
.
On Ci és la columna i-sésima, de manera que
C
aa
a
i
i
i
ni
1
2
.
1) det C C C Cj j n1 1 10 0
,
si una columna és tot zeros det( )A 0 .
2) det C C C Ci i n1 0 , si dues columnes són iguals det( )A 0 .
3) det C C C Cj n i iii j
n
11
0
si C j ,
si alguna columna és combinació lineal (C.L.) de la resta det( )A 0 . 4)
det
det
C C KC C C
K C C C C C
j j j n
j j j n
1 1 1
1 1 1
,
det(kA) = kn·det(A). 5)
det
det det
'
'
C C C C C C
C C C C C C C C C C
j j j j n
j j j n j j j n
1 1 1
1 1 1 1 1 1
.

11
6) det detC C C C C C C Ci j n j i n1 1 , si permutem 2 columnes, el determinant canvia de signe.
7) det detC C C C C C Cj n j i iii j
n
n1 11
,
si a una columna li sumem una combinació lineal de la resta, el determinant no canvia.
8) det(A·B) = det(A) · det (B), A, B Mnxn.
9) det( )det( )
AA
1 1 si det(A) 0.
10) det(A) = det(AT) les set primeres propietats referents a columnes, també són certes per a les files.
1.3. Càlcul del determinant per adjunts Sigui (aij) Mnxn, l’adjunt de l’element aij és:
adj{aij} = (–1)i+j · det(Aij), on Aij M(n-1)x(n-1) és la matriu que s’obté suprimint la fila i i la columna j a la matriu A. Càlcul del det(A):
det( ) ( )
( )
A a adj a
a adj a
ik ikk
n
kj kjk
n
amb "i" una fila qualsevol
amb " j" una columna qualsevol
1
1 .
NOTA: aquest és el mètode de càlcul de determinants habitual per a matrius d’ordre superior a 3.
Exemple
det( )A
a a a aa a a aa a a aa a a a
11 12 13 14
21 22 23 24
31 32 33 34
41 42 43 44
.
Desenvolupem det(A) per a la fila 1:

12
aa a aa a aa a a
aa a aa a aa a a
aa a aa a aa a a
aa a aa a aa a a
111 1
22 23 24
32 33 34
42 43 44
121 2
21 23 24
31 33 34
41 43 44
131 3
21 22 24
31 32 34
41 42 44
141 4
21 22 23
31 32 33
41 42 43
1 1
1 1
( ) ( )
( ) ( )
.
Normalment, s’aplica aquesta propietat fins a obtenir matrius d’ordre 3, on apliquem la regla de Sarrus.
1.4. Rang d’una matriu Sigui A Mnxm no nul·la, el rang(A) és un nombre natural associat a A que determina una característica seva, rang(A) N. Menor d’ordre p (p n, p m) d’una matriu A Mnxm és el determinant d’una matriu quadrada Mpxp que s’obté suprimint n – p files i m – p columnes a la matriu A. Diem rang(A) a l’ordre del menor més gran de A que sigui diferent de zero. NOTA: si una matriu A és no nul·la rang(A) 1, ja que existeix algun menor d’ordre 1 0.
Exemple
A
5 1 11 1 02 3 33 2 2
,
rang(A) 3, ja que els menors d’ordre màxim són d’ordre 3. Possibles menors d’ordre 3:
5 1 11 1 02 3 3
135 1 11 1 03 2 2
75 1 12 3 33 2 2
01 1 02 3 33 2 2
5
rang(A) = 3.
Si tots els menors fossin 0 rang(A) 2 i caldria analitzar els possibles menors d’ordre 2. Si una matriu A és no nul·la rang(A) 1, ja que existeix algun menor d’ordre 1 0.

13
1.5. Inversa d’una matriu Sigui A Mnxn quadrada i det(A) 0, aleshores existeix A-1 Mnxn (inversa de A) tal que:
A·A-1 = A-1·A = Id,
A -1 1 1
det( )( )
det( )( )
AAdj A
AAdj AT T
.
On Adj(A) Mnxn és la matriu que s’obté substituint cada element de A pel seu adjunt.
Exemple
A
1 0 12 1 11 2 1
com det(A) = 2 A-1.
Calculem la transposada:
AT
1 2 10 1 21 1 1
.
Calculem la matriu d’adjunts de AT:
125101123
1021
2011
2112
1121
1111
1112
1110
1120
1121
TAAdj .
I finalment tenim:
A -1
1101
32
12
12
12
52
12
det( )( )
AAdj AT .
Comprovem que, efectivament, es compleix: A·A-1 = Id.

14
RESUM En aquesta sessió hem repassat breument com es fan les operacions més bàsiques amb matrius, hem definit el concepte de determinant i les propietats que es poden aplicar per facilitar el seu càlcul, i hem presentat també els conceptes de rang i de matriu inversa.

15
SESSIÓ 2: Exercicis de determinants i de matrius
FITXA DE LA SESSIÓ Nom: Exercicis de determinants i de matrius Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió 1 es van presentar alguns conceptes associats a les matrius que, en aquesta segona sessió, s’hauran de posar en pràctica.
OBJECTIUS Aplicar els conceptes estudiats a la sessió anterior.
CONTINGUTS En aquesta sessió es presenten exercicis resolts i se’n proposen d’altres per aplicar els conceptes presentats a la sessió 1.
1.6. Exercicis
1.6.1. Exercicis resolts
Problema R.1
Demostreu la següent igualtat, aplicant només les propietats dels determinants:
xx
xx x x
3 3 33 2 22 2 91 1 1 1
2 3 9 .

16
SOLUCIÓ:
Apliquem una de les propietats dels determinants:
si a una columna (o fila) li sumem una combinació lineal de les altres columnes (o files), el determinant no varia,
per transformar el determinant de l’enunciat en un determinant triangular inferior (zeros per sobre de la seva diagonal principal):
111192200210003
11119222230003
1111922223333
Fila) 2(4ª - Fila 2ªFila) 3(4ª - Fila 1ª
xx
x
xx
x
xx
x
1111097700210003
Fila) 9(4ª - Fila 3ª
x
xx
.
Resolem ara per adjunts:
1111097700210003
xx
x
= x x x 3 2 9 1.
D’altra banda, aplicant la propietat dels determinants que diu que el determinant de qualsevol matriu és 0 si aquesta té dos columnes o files iguals, podem deduir que:
si x 9 , les columnes 3 i 4 del determinant són iguals 0)9( p ; si x 2 , les columnes 2 i 3 del determinant són iguals 0)2( p ; si x 3, les columnes 1 i 2 del determinant són iguals 0)3( p .
Per tant )3)(2)(9()( xxxxp .
Problema R.2
Trobeu el rang de les següents matrius:
a) b) c) d)

17
1 1 02 1 13 0 2
2 1 3 41 0 1 26 2 4 4
1 0 3 51 0 3 5
3 1 5 92 2 1 1
2 3 5 1 31 1 1 2 12 1 3 1 45 1 2 8 1
.
SOLUCIÓ:
a) Aplicant la regla de Sarrus per trobar el determinant:
det(M) = 1 1 02 1 13 0 2
– 2 + 3 – 4 0 .
- Si det(M) 0 3Rang M( ) - Si det(M) 0 2Rang M( ) Com que el determinant de la matriu és 0, el seu rang és el mateix de l’ordre de la matriu, és a dir, 3. b) Com que la matriu no és quadrada, el seu rang serà l’ordre del menor més gran
que tingui un determinant diferent de zero. D’aquesta matriu podem obtenir els següents quatre menors d’ordre 3:
2 1 31 0 16 2 4
01 3 40 1 22 4 4
02 1 41 0 26 2 4
02 3 41 1 26 4 4
0
; ; ; ;
.
Tots els determinants dels menors són zero; això vol dir que 2Mrang . Calculem el determinant dels menors d’ordre 2: si un d’ells és diferent de zero el rang serà 2. Per exemple:
0 22 4
4 0
rang(M) = 2.

18
c) Trobarem el determinant de la matriu mitjançant el càlcul del determinant per adjunts. Definim un cofactor o adjunt de l’element Ai j de la matriu (M) com adjunt
de l’element jiji
ji Ma det1 . On Mi j és la matriu que resulta de suprimir la fila i i la columna j.
Així doncs resolem segons hem definit:
0122513301
15122
913501
130112
951530
11det 542
M .
det(M) = 0 rang(M) 4 , és a dir, rang(M) 3 . Calculem els menors d’ordre 3, si algun té determinant 0 , aleshores rang(M) = 3. Com que els determinants dels menors d’ordre 3 anteriors són diferents de zero podem dir que:
d) Atès que és una matriu no quadrada M4 5 el 4)( Mrang . Agafarem un dels
menors d’ordre 4 i el resoldrem per adjunts. Per exemple:
032215312111
11815112211
51825132211
31821131211
21
8215131221111532
det 5432
.
Com que el determinant d’aquest menor d’ordre quatre és diferent de zero, el rang de la matriu és 4.
NOTA: el rang d’una matriu també es pot calcular pel mètode de Gauss, de forma que el rang serà igual al nombre de files diferents de zero de la matriu resultant després d’acabar el procés d’eliminació per Gauss.
rang(M) = 3.
rang(M) = 4.

19
1.6.2. Exercicis proposats
Problema P.1
Es defineixen les següents matrius:
A = (C1 C2 C3 C4). B = (C1 C2 + 3C1 – C3 C3 C4).
D = (C1 5C2 + 3C1 – C3 C3 C4). E = (C1 3C1 – C3 C3 C4).
F = (C4 C3 C2 C1). Calculeu el determinant de les matrius A, B, D, E i F en funció del determinant de la matriu A.
Problema P.2
Demostreu per adjunts el fet que el det(A), quan A és una matriu quadrada triangular, es calcula fent el producte dels elements de la diagonal.
Problema P.3
Raoneu (sense aplicar Sarrus), que les arrels del següent polinomi són 5, 7 i –12:
p (x) x 7 77 x 55 5 x .
Problema P.4
Resoleu l’equació següent mitjançant transformacions del determinant (aplicant les propietats):
x 2x 1 2x 12x 1 3x 1 4x3x 1 4x 6x 1
0
.
Problema P.5
Demostreu, aplicant les propietats dels determinants, la següent igualtat:
1 x x2
1 y y2
1 z z2 x yy zz x
.

20
Problema P.6
Comproveu mitjançant les propietats dels determinants:
1 a b c1 b c a1 c a b
0 a, b, c
.
Problema P.7
Demostreu la següent igualtat:
1 a 1 1 11 1 b 1 11 1 1 c 11 1 1 1 d
abcd bcd acd abd abc
.
Problema P.8
Trobeu, en cas que sigui possible, les matrius inverses de: a) b) c) d)
1 0 01 1 01 1 1
1 2 31 0 10 1 2
1 2 1 11 1 2 11 0 3 11 2 1 4
1 1 0 00 1 1 00 0 1 11 0 0 1
. Feu-ho per 2 mètodes diferents.
SOLUCIÓ:
a)
112011001
.
b) det = 0. c)
381
14416647101852017213149
.

21
d) det = 0.
Problema P.9
Demostreu la següent igualtat, aplicant el nombre màxim de propietats dels determinants:
b a c bb c a a
c c a babc
4 .
Problema P.10 Aquest problema s’ha de lliurar
Calculeu en funció de N, a i b, el determinant d’una matriu de N x N amb la següent estructura:
ANxN a i j
a i jb i j
.
RESUM En aquesta sessió s’han proposat diferents problemes per aplicar els conceptes estudiats a la sessió 1. El problema 10 ha de presentar-se resolt.

22

23
SESSIÓ 3: Estudi de sistemes d’equacions lineals
FITXA DE LA SESSIÓ Nom: Estudi de sistemes d’equacions lineals Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Donat un sistema d’equacions lineals, saber identificar de quin tipus es tracta, i saber realitzar l’estudi corresponent si el sistema depèn d’un o de més paràmetres.
CONTINGUTS En aquesta sessió veurem diferents maneres de representar un sistema d’equacions lineals, i es presentarà el teorema de Rouché-Frobenius per identificar de quin tipus es tracta. Al final de la sessió es presenten alguns exercicis resolts d’exemple i se’n proposen d’altres per aplicar el concepte tractat.
2. Estudi i resolució de sistemes d’equacions lineals
2.1. Representació d’un sistema d’equacions lineals
Sistema d’equacions lineals (S.E.L.): conjunt de m equacions lineals, amb n incògnites x1, x2, ..., xn:
a x a x a x ba x a x a x b
a x a x a x b
n n
n n
m m mn n m
11 1 12 2 1 1
21 1 22 2 2 2
1 1 2 2
,
on els coeficients aij i els termes independents bi (i = 1, ..., m, j = 1, ..., n) són constants ( R o C).

24
Cas particular: si b1 = b2 = ... = bm = 0 en diem sistema homogeni. Els sistemes d’equacions lineals també poden representar-se de forma vectorial o de forma matricial: vectorial:
a
aa
a
i
i
i
mi
1
2 i = 1, ..., n;
b
bb
bm
1
2
a x a x a x bn n1 1 2 2 . matricial:
aa
a
aa
a
aa
a
xx
x
bb
bm m
n
n
mn n m
11
21
1
12
22
2
1
2
1
2
1
2
A x bmxn nx1 mx1
on A M
x Rb R
mxnn
m
o C o C
n
m.
Direm matriu associada al sistema a la matriu de coeficients:
A
aa
a
aa
a
aa
am m
n
n
mn
11
21
1
12
22
2
1
2
.
Direm matriu ampliada del sistema a la matriu de coeficients i termes independents:
A A b
aa
a
aa
a
aa
a
bb
bm m
n
n
mn m
'
11
21
1
12
22
2
1
2
1
2
,
de forma que es compleix que )'()( ArangArang .

25
Resoldre els sistemes d’equacions lineals vol dir trobar les possibles solucions de x que verifiquin les m equacions.
2.2. Estudi d’un sistema d’equacions lineals
2.2.1. Tipus de sistemes d’equacions lineals Segons les solucions d’un sistema d’equacions lineals farem la següent classificació:
Sistema compatible: alguna solució x x x xn 1 2, , , que verifica totes les
equacions.
o Sistema compatible determinat: una única solució x x xn1 2, , , . o Sistema compatible indeterminat: més d’una solució ( infinites solucions).
Sistema incompatible: no solució, x x x xn1 2, , , que verifiqui totes les equacions alhora.
2.2.2. Teorema de Rouché-Frobenius
Sigui A x b
un sistema de m equacions lineals amb n incògnites:
A és la matriu associada. A’ = (A | b) és la matriu ampliada.
El teorema de Rouché-Frobenius indica que el sistema és: Sistema compatible rang(A) = rang(A’).
o Sistema compatible determinat rang(A) = rang(A’) = n ( solució única). o Sistema compatible indeterminat rang(A) = rang(A’) < n ( solucions amb
n-rang(A) graus de llibertat). Sistema incompatible rang(A) < rang(A’) (no solució). Observació: si el sistema és homogeni, aleshores rang(A) = rang(A’) el sistema sempre és compatible. És important recordar que )'()( ArangArang .

26
2.3. Exercicis d’estudi de sistemes d’equacions lineals
2.3.1. Exercicis resolts
Problema R.1
Discutiu segons els valors del paràmetre t, la compatibilitat o la incompatibilitat del següent sistema d’equacions lineals:
t1y2ttx62tyx1t
)()(
.
SOLUCIÓ:
At t
t t
( )( )
16 2
521
0235t(-t)(6t)-2)+1)(-t-(t=det(A) 2tt
t
si t = –1 o t = 2/5 det(A) = 0 rang(A) = 1. si t –1 i t 2/5 det(A) 0 rang(A) = 2.
At t
t t t' ( )
( )
16 2
21
4 - t t )1()2(
2 2
tt
t
t = –1 o t = 2/5 042 tt rang(A’) = 2.
Pel teorema de Rouché-Frobenius:
si t = –1 o t = 2/5 rang(A) = 1 < 2 = rang(A’): sistema incompatible. si t –1 i t 2/5 rang(A) = 2 = rang(A’): sistema compatible determinat.
Problema R.2
Estudieu de quin tipus de sistema es tracta, en funció dels valors que pren el paràmetre a:
ax y zx y az
y z
03
2 2 2.

27
SOLUCIÓ:
Incompat. S. )rang(A'rang(A) 022031-1-01-0
:0a Si
Incompat. S. )rang(A'rang(A) 022031-1-01-1
:1a Si
SCD 0a i 1a )1(2)det(
SiaaA
Problema R.3
Discutiu el següent sistema d’equacions segons els valors de ba, :
22
1
zybxay
zayx.
SOLUCIÓ:
Calculem el determinant de la matriu associada:
1per anulas'11201011
bbb
a,
i sí que observem un menor de la matriu ampliada pel cas presentat,
1 o 3per anulas'032221
1011
2
aaaaaa
,
per tant, Per a tot a i per a b 1 sistema compatible determinat. Per a a = 3 o a = –1 i b = 1 sistema compatible indeterminat. Per a a ≠ 3 o a ≠ –1 i b = 1 sistema incompatible.

28
Problema R.4
Estudieu el sistema següent en funció dels paràmetres a, b i c :
cazycybx
zy
2
033.
SOLUCIÓ:
La matriu ampliada del sistema és:
cacbA
2001
0330' .
Calculem el rang de la matriu A del sistema:
2 o 0 0233620
01330
ababbab
ab .
Si 0b i 2a , el sistema serà compatible determinat, ja que el rang(A) = 3 = rang(A’) = = nre. d’incògnites. A més, verifiquem que les columnes segona i tercera de la matriu A són linealment independents. Per a b = 0, atès que la primera columna és linealment dependent, de les dues següents només cal verificar el següent menor d’ordre 3 de la matriu ampliada:
3 o 0 033392
01033
acacacc
cac .
Per tant,
si b = 0 i (c = 0 o a = 3), rang(A) = rang(A’) = 2. Sistema compatible indeterminat amb un grau de llibertat. Si b = 0 i ( 3 i 0 ac ), rang(A’) = 3 < 2 = rang(A). Sistema incompatible.

29
Per a a = 2:
0 0322
01033
cc
cc .
Per tant,
si a = 2 i c = 0, rang(A) = rang(A’) = 2. Sistema compatible indeterminat amb un grau de llibertat b . Si a = 2 i 0c , b . Sistema incompatible.
2.3.2. Exercicis proposats
Problema P.1
De quin tipus de sistema es tracta?
2 3 136
2 2
x y zx y z
x y z
.
Problema P.2
De quin tipus de sistema es tracta?
x y zx y z
x y z
2 3 12 2
2 3.
Problema P.3
De quin tipus de sistema es tracta?
x y zx y z
x y z
2 3 01
2 3 2 2.

30
Problema P.4
Estudieu de quin tipus de sistema es tracta, en funció dels valors que pren el paràmetre a:
x y zax y z
x y zx y a
21
3 34 2
.
Problema P.5
Estudieu de quin tipus de sistema es tracta, en funció dels valors que pren el paràmetre α:
x y zx y z
x y z
2 11
3.
RESUM En aquesta sessió hem vist com identificar si un sistema d’equacions lineals té o no solució, i hem aprés a fer l’estudi del sistema segons si aquest depèn d’un o de més paràmetres. Al final de la sessió s’han mostrat alguns exercicis resolts com a exemple i se n’han proposat d’altres per posar en pràctica el concepte estudiat.

31
SESSIÓ 4: Mètodes de resolució de sistemes d’equacions lineals
FITXA DE LA SESSIÓ Nom: Mètodes de resolució de sistemes d’equacions lineals Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS En aquesta sessió estudiarem diferents mètodes per trobar la solució en sistemes d’equacions lineals compatibles.
CONTINGUTS En aquesta sessió s’estudiaran els mètodes de Cramer, de la matriu inversa, de Gauss i de Gauss-Jordan. També es presentarà al final del capítol un mètode per resoldre diferents sistemes d’equacions lineals similars (mateixa matriu del sistema), i es veurà l’aplicació d’aquest mètode en el càlcul de la matriu inversa.
2.4. Mètodes de resolució de sistemes d’equacions lineals
Sigui una matriu A que compleix que rang(A) = r = nombre d’equacions linealment independents (L.I.). Si rang(A) = r < m (nombre total d’equacions) aleshores equacions que són combinació lineal de la resta. Només hem d’agafar r equacions linealment independents. Per exemple:
2 24 2 4
x yx y
es converteix en 2 2x y perquè la segona equació és combinació
lineal de la primera.

32
2.4.1. Regla de Cramer En funció de la discussió del sistema, la forma de procedir serà una o una altra.
Sistema compatible determinat
Sistema compatible determinat rang(A) = rang(A’) = m (nombre d’equacions linealment independents) = n (nombre d’incògnites).
aa
a
aa
a
aa
a
xx
x
bb
bm m
n
n
mn n m
11
21
1
12
22
2
1
2
1
2
1
2
a a x b1 2 a n .
O també de forma vectorial:
a x a x a x bn n1 1 2 2
Observem que det(A) 0 sempre, ja que rang(A) = n. Demostració de l’expressió anterior:
j1121 a columna la de lloc elen b col·loquem ,,,,,,,det
njj aabaaa
nj
n
kkkj aaaxaaa
,,,,,,,det 1
1121 {per les propietats 4 i 5 dels determinants}
njk
n
kk aaaaax
,,,,,,det 121
1
x a a a a a aj j j j ndet , , , , , , ,
1 2 1 1
x Aj det( )
x
a a a b a a
Ajj j ndet , , , , , , ,
det;
1 2 1 1
j = 1...n .
1...n=j ;
det,,,,,,,det 1121
Aaabaaa
x njjj
.

33
Sistema compatible indeterminat
Sistema compatible indeterminat rang(A) = rang(A’) = m (nombre d’equacions linealment independents) < n (nombre d’incògnites). Graus de llibertat: n – rang(A) = n – m. Incògnites principals: x1, x2, ..., xm. Incògnites no principals: xm+1, xm+2, ..., xn. Reescrivim el sistema:
a x a x a x b a x a xa x a x a x b a x a x
a x a x a x b a x a x
m m m m n n
m m m m n n
m m mm m m mm m mn n
11 1 12 2 1 1 1 1 1 1
21 1 22 2 2 2 2 1 1 2
1 1 2 2 1 1
aa
a
aa
a
aa
a
xx
x
b a x a xb a x a x
b a x a xm m
m
m
mm m
m m n n
m m n n
m mm m mn n
11
21
1
12
22
2
1
2
1
2
1 1 1 1 1
2 2 1 1 2
1 1
A' ' x' ' b' 'mxm mx1
. De forma vectorial:
a x a x a x bm m1 1 2 2 ' '
b' '= b - akk=m+1
n
xk
1...m=j ;
)''det(,,,'',,,,det 1121
Aaabaaa
x mjjj
1...m=j ;)''det(
,,,,,,,det 11
121
A
aaxabaaax
mj
n
mkkkj
j
.
Observem que det(A’’) 0 sempre, ja que rang(A’’) = m. Obtenim x1, x2, ..., xm en funció de xm+1, xm+2, ..., xn. infinites solucions, per cada valor que donem a xm+1, xm+2, ..., xn tindrem una solució.

34
2.4.2. Mètode de la matriu inversa En funció de la discussió del sistema, la forma de procedir serà una o una altra.
Sistema compatible determinat
Sistema compatible determinat rang(A) = rang(A’) = m = n (nombre d’incògnites): com que det(A) 0 A-1 (A-1·A = A·A-1 = Id).
A x b
busquem
x
xx
x n
1
2 .
Multipliquem l’equació matricial per A-1:
A A x A b-1 -1
.
El producte de matrius NO és commutatiu (A-1 a la mateixa banda).
Id x A b-1
x A b-1 .
Sistema compatible indeterminat
Sistema compatible indeterminat rang(A) = rang(A’) = m < n (nombre d’incògnites). Graus de llibertat: n – rang(A) = n – m. Incògnites principals: x1, x2, ..., xm. Incògnites no principals: xm+1, xm+2, ..., xn. Reescrivim el sistema (de manera idèntica a com es va fer per Cramer):
A' ' x' ' b' '
on b' '= b - ak
k=m+1
n
xk .
Com que det(A’’) 0 (A’’) -1. Multipliquem l’equació matricial per A-1:
(A' ' ) (A' ' ) x' ' (A' ' ) b' '-1 -1
. El producte de matrius no és commutatiu. Id
x' ' (A' ' ) b' '-1
x' ' (A' ' ) b' '-1 .

35
2.4.3. Mètodes de Gauss-Jordan i de Gauss
Sigui A x b
un sistema de m equacions lineals amb n incògnites.
rang(A) = r A Mmxn. Fent transformacions elementals sobre la matriu ampliada del sistema A’ = (A | b) s’obté una matriu amb la següent estructura:
A’ = (A | b) ~
m
r
r
rrnrrrr
nrr
nrr
d
ddd
dd
ccc
cccccc
2
1
2
1
)2()1(
2)2(2)1(2
1)2(1)1(1
000000
000000000000
100
010001
.
Definim un sistema equivalent com un sistema d’equacions lineals amb les mateixes solucions que A x b
.
Transformacions elementals: 1) Canviar l’ordre de les files (1 fila 1 equació). 2) Multiplicar una fila per una constant diferent de zero. 3) Fer combinacions lineals de files:
F F Fi i j , constants o bé, F Fi k kk
n
k
1
constants.
4) Canviar l’ordre de les columnes també canvia l’ordre de les incògnites corresponents.
Sistema equivalent transformat (té les mateixes solucions que el sistema original):
m
2r
1r
rnrn1r1rrr
2nn21r1r22
1nn11r1r11
d0
d0d0
dxcxcx
dxcxcxdxcxcx
)(
)(
)(
.

36
Discussió: Sistema incompatible di 0, i = r + 1, ..., m. Sistema compatible di = 0, i = r + 1, ..., m.
o Sistema compatible determinat: si rang(A) = r = n (nombre d’incògnites):
A’ = (A | b) ~
1 0 00 1 0
0 0 1
1
2
dd
d n
x dx d
x dn n
1 1
2 2
.
o Sistema compatible indeterminat: si rang(A) = r < n (nombre d’incògnites): Graus de llibertat: n – rang(A) = n – r. Incògnites principals: x1, x2, ..., xr. Incògnites no principals: xr+1, xr+2, ..., xn.
n
rkkrkr
n
rkkk
n
rkkk
xcd
xcd
xcd
1
122
111
100
010001
n
rkkrkrr
n
rkkk
n
rkkk
xcdx
xcdx
xcdx
1
1222
1111
.
El mètode de Gauss consisteix a posar zeros només per sota o sobre de la diagonal d’uns, i després resoldre cadascuna de les equacions, començant per la que només té una incògnita. D’aquesta manera, quan ja s’ha resolt la primera, passem a la següent, que dependrà de dues incògnites, però on ja coneixerem el valor d’una d’elles (calculada amb la primera equació). Així, ja podrem calcular el valor de la segona de les incògnites. Aquest procés es repeteix fins a trobar el valor de totes les incògnites, resolent, per a cadascuna d’elles, una equació amb una incògnita.
2.4.4. Resolució conjunta de sistemes d’equacions lineals similars
Definim sistemes similars com sistemes d’equacions lineals amb la mateixa matriu associada.
A x b
A x b
A x bk k
1 1
2 2
K sistemes compatibles determinats amb A Mnxn tal que det(A)
0. Podem resoldre’ls tots alhora amb Gauss-Jordan: (A | b1, b2, ..., bk) ~ (Id | d1, d2, ..., dk), o bé, resoldre’ls per separat.

37
Aplicació: càlcul de la matriu inversa per Gauss-Jordan
Sigui A Mnxn tal que det(A) 0 A-1 tal que A-1·A = A·A-1 = Id.
Busquem una matriu X x x xn
1 2 tal que A·X = Id (aleshores A-1 = X).
Id e e en
1 0 00 1 0
0 0 1
1 2
.
Resoldre A·X = Id equival a resoldre: A x x x e e en n
1 2 1 2 .
A x eA x e
A x ek k
1 1
2 2
n sistemes d’equacions lineals similars.
A e e Id d d dn n e A -1
1 2 1 2
x d
x d
x dn n
1 1
2 2
és la solució.
La matriu que busquem: X x x x d d dn n
1 2 1 2 .
En resum: (A | Id) ~ ... ~ (Id | A-1).
Exemple
Calculeu la matriu inversa de A:
A = 1 0 12 1 11 2 1
.

38
SOLUCIÓ:
f2 = f2 – 2f1 i f3 = f3 + f1 f3 = f3 – 2f2
1 0 12 1 11 2 1
1 0 00 1 00 0 1
1 0 10 1 10 2 0
1 0 02 1 0
1 0 1
1 0 10 1 10 0 2
1 0 02 1 0
5 2 1
2 0 00 2 00 0 2
3 2 11 0 15 2 1
1 0 00 1 00 0 1
3 2 1 1 21 2 0 1 25 2 1 1
2
f1 = 2f1 – f3 i f2 = 2f2 + f3.
RESUM En aquesta sessió hem estudiat quatre mètodes de resolució de sistemes d’equacions lineals i hem aprés un mètode per resoldre diversos sistemes al mateix temps si tenen la mateixa matriu del sistema. També hem vist com aquest últim mètode es pot aplicar en el càlcul de la matriu inversa.

39
SESSIÓ 5: Exercicis d’estudi i resolució de sistemes d’equacions lineals
FITXA DE LA SESSIÓ Nom: Exercicis d’estudi i resolució de sistemes d’equacions lineals Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les dues sessions precedents es va tractar l’estudi de sistemes i alguns mètodes per resoldre els sistemes compatibles. En aquesta sessió es posaran tots aquests coneixements en pràctica.
OBJECTIUS Aplicar els conceptes estudiats a les dues sessions anteriors.
CONTINGUTS En aquesta sessió es presenten exercicis resolts i se’n proposen d’altres per aplicar els conceptes presentats a les dues sessions precedents.
2.5. Exercicis
2.5.1. Exercicis resolts
Problema R.1
Discutiu, segons els valors del paràmetre t, la compatibilitat o la incompatibilitat dels següents sistemes d’equacions lineals:
5 11 93 5 2
2 4 2 1
x y z tx y zx y z
.
Resoleu el sistema per a t = 4 aplicant els tres mètodes següents: regla de Cramer, mètode de la matriu inversa i mètode de Gauss.

40
SOLUCIÓ:
Teorema de Rouché-Frobenius:
S. CompatibleDeterminat si
Indeterminat si S. Incompatible
Rang A Rang ARang A nRang A n
Rang A Rang A
'( )( )
'
on A és la matriu associada:
2425319115
A ,
i A’ és la matriu ampliada formada pels coeficients de l’equació i pel vector de termes independents:
12422531
9115 tA .
Calculem el rang de A:
det(A) = 0 rang A < 3
04111531115
det rang(A) = 2.
Calculem el rang de A’, calculem els quatre menors d’ordre 3 de la matriu ampliada:
02425319115
t 4 - 14t 56 - 27 44 20t 72 -6t - 55 - 124253
911
t
t- 4 8t 32 9 2010t 36 2t 25 122251
95
t

41
t 4- 2t 8- 11 40 6t 444t 15 - 142231
115
t
.
Per a t = 4 tots els menors d’ordre 3 valen 0: rang(A) = rang(A’) = 2 < n = 3 sistema compatible indeterminat. Per a t 4: rang(A) = 2 < 3 = rang(A’) sistema incompatible.
Resolem el sistema per a t = 4, és a dir, pel sistema compatible indeterminat:
124225349115
zyxzyxzyx
.
Graus de llibertat = nombre d’incògnites – rang(A) = 3 – 2 = 1 = n – r. rang(A) = rang(A’) = 2 només hi ha dues equacions linealment independents, escollim per exemple les dues primeres i reescrivim el sistema d’equacions:
5 11 4 9
3 2 5x y zx y z
.
Regla de Cramer
xa a b aa a a a
in
i n
detdet
1 2
1 2
2
5144
552227121115
1152394
31115
3521194
zzzzzz
z
x
y
zz z z z z z
5 4 91 2 55 111 3
5 2 5 4 915 11
10 25 4 94
6 164
.
Mètode de la matriu inversa
Només és aplicable si existeix la matriu inversa de A (A té inversa si és quadrada i el seu determinant és diferent de 0). Llavors:

42
Ax b
sabent que A A A A I 1 1 A A x A b
I x A b
x A b
1 1
1
1
.
Podem trobar la matriu inversa, ja que es verifiquen les condicions en eliminar la 3a. fila. Calculem la matriu inversa per Gauss-Jordan:
4
54
1104
114
301'
103101115
BB
238
2514
238
2514
5294
45
41
411
43
1
zy
zx
z
z
zz
bAx
.
Gauss
00005
65
165
4049115
38205
65
165
4049115
3820253149115
1242253149115
5 11 9 40 4
516
56
5
.
De la segona fila:
45
165
65
y z 45
65
165
y z yz
6 165
54
yz
8 32 .
De la primera fila:
xz
14 5
2 .
Problema R.2
Discutiu, segons els valors del paràmetre t, la compatibilitat o la incompatibilitat del següent sistema d’equacions lineals:

43
x ty z tx y tz ttx y z t
22 1
.
Resoleu el sistema per a t = 3 aplicant els tres mètodes següents: regla de Cramer, mètode de la matriu inversa i mètode de Gauss.
SOLUCIÓ:
tttt
tt
11)1(211
211.
Perquè el sistema sigui compatible determinat ens interessa que el 0det A . Així doncs, forçarem el determinant a zero per saber per a quins valors el sistema no serà compatible determinat.
12
0)2()1(232311
1111
233
tt
ttttttt
tt
.
Per a 2 ti1t sistema compatible determinat. Per a t = –2 el sistema és compatible indeterminat ja que:
Rang A Rang A n d incognites( ) ( ' ) º '
A’=1 2 1 01 1 2 22 1 1 2
01121
0112211
121det
A .
El determinant de tots els menors d’ordre 3 de (A’) també és zero, rang(A’) = 2. Per a t = 1 el sistema és incompatible ja que:
Rang A Rang A( ) ( ' )
A’= 2)'(;1)(11114111
3111
ARangARang .
Resolem el sistema per a t = 3 (sistema compatible determinat):

44
A’=
31138311
5131.
Regla de Cramer
420
313811
531
;25
20133381151
;23
2030
113311131113318135
zyx .
Mètode de la matriu inversa
A X b X A b
1
42/523
38
5
1.04.01.01.01.04.0
4.01.01.0.
x = 3/2, i = 5/2, z = –4. Gauss
401000132205131
12280132205131
31138311
513132433133
122FFFFFF
FFF
2353
;251322
;41040
xzyx
yzy
z
.
Problema R.3
Donat el següent sistema d’equacions lineals:
22132
zyxazx
bzyx
.
a) Estudieu el sistema en funció dels paràmetres reals a i b. Feu un quadre resum
del tipus de sistema en funció dels valors dels paràmetres a i b.

45
b) Resoleu el sistema en el cas a = 1 i b = 3, usant el mètode de Cramer o el de la matriu inversa.
SOLUCIÓ:
a) Estudi del rang de la matriu del sistema:
1211
01321
aa .
Si a = 1, 2Arang , ja que el menor d’ordre 2 següent és diferent de zero:
20121
.
Per a aquest cas, estudiem el rang de la matriu ampliada:
22111101
321 bA .
Calculem els 3 menors restants:
3211101
213
221111
313
221110
32 b
bb
bb
b.
Per tant, si a = 1 i b = 3, el rang de la matriu del sistema i el de la matriu ampliada són igual a 2, aleshores és un sistema compatible indeterminat (atès que hi ha tres incògnites). D’altra banda, si a = 1 i b 3 els rangs no coincideixen i, per tant, és un sistema incompatible. Quadre resum:
a b Tipus de sistema – {1} Compatible determinat
1 3 Compatible indeterminat 1 – {3} Incompatible
b) Resolem el sistema pel cas a = 1 i b = 3, és a dir, per a un sistema compatible
indeterminat. Com hem comprovat a l’apartat anterior, per a aquest cas el sistema té rang 2, i per tant hem d’eliminar una de les 3 equacions per poder aplicar el mètode de Cramer o el de la matriu inversa. Qualsevol de les 2 equacions són linealment independents, eliminem per exemple la tercera. Apliquem el mètode de

46
la matriu inversa. Prèviament reescrivim el sistema en funció d’un paràmetre: escollim la variable z com a paràmetre:
zz
yx
zxzyx
133
0121
1332
.
Solucionem el sistema pel mètode de la matriu inversa del sistema ja reduït:
zz
zz
zz
yx
11
133
2/12/110
133
0121 1
.
Per tant, la solució final és: zyx 1 .
Problema R.4
Sigui el següent sistema d’equacions lineals:
1
1
zaxabzy
yax
.
a) Estudieu el sistema segons els paràmetres reals a i b. b) Per a a = –2 i b = 1, resoleu el sistema aplicant el mètode de la matriu inversa.
SOLUCIÓ:
a) Per realitzar l’estudi, hem de tenir present el teorema de Rouché-Frobenius, el qual ens permet fer l’estudi del sistema coneixent els rangs de la matriu del sistema i de la matriu ampliada del sistema. Per aquesta raó analitzarem els rangs de les matrius abans esmentades:
Quin és el rang(A)?
0)1(10
1001
baa
ba
A rang(A) 3 si a = 0 i/o b = 1.
Cas 1: Si a ≠ 0 i b ≠ 1 llavors, rang(A) = rang(A’) = nombre d’incògnites = 3 sistema
compatible determinat. Cas 2: Si a = 0 Quin és el rang(A)?
110
1 brang(A) = 2.

47
Quin és el rang(A’)?
..)'()(3)'(1....º)'()(2)'(1
111001101
ISARARARbICSincognARARARb
bb
Cas 3: Si b = 1 Quin és el rang(A)?
110
11rang(A) = 2.
Quin és el rang(A’)?
..)'()(3)'(2....º)'()(2)'(2
2110
11101
ISARARARaICSincognARARARa
aa
b) Resolem per a a = –2 i b = 1 (sistema compatible indeterminat). Segons el mètode
de la matriu inversa:
bAxbAxAAbxA 111 ;; .
Si substituïm els valors observem que podem eliminar una de les equacions:
z
z
zyx
Adj
zyx
zyx
zyyx
zxzy
yx
22
)1(
21
1011
21
1011
21
1102
21
1012
21
1012
21
1012
212
122
12
1
1
Solució:
z
z
yx
22
)1(.

48
Problema R.5
Donat el sistema:
11
1
azbybzayx
yx
.
On a i b són nombres reals qualssevol: a) Estudieu el sistema en funció dels paràmetres a i b. Feu un quadre resum. b) Trobeu la solució del sistema quan 1a i 0b .
SOLUCIÓ:
a) Comencem amb el determinant de la matriu associada:
1per anul·las'1 22 babaA . I per tant, es tenen en compte dos casos. Un primer força evident on a no val b2 + 1, llavors el sistema serà compatible determinat. Un segon que es desdobla, si a pren aquest valor:
0per anul·las' * 10
1111011
*12
22
bA
bbbbAba .
Llavors el quadre resum quedarà:
a b Resultat discussió
≠ b2 + 1 Sistema compatible determinat = b2 + 1 = 0 Sistema compatible indeterminat = b2 + 1 ≠ 0 Sistema incompatible
b) Substituint els valors queda un sistema molt simple:
llibertat degrau un amb ...01
011
ICSz
yx
zyxyx
.

49
Problema R.6
Donat el següent sistema d'equacions lineals:
bzyx
a12
41111
211,
on a i b són dos paràmetres reals. a) Realitzeu l'estudi del sistema en funció dels valors de a i b. Deixeu els resultats
clarament indicats en una taula resum. b) Resoleu el sistema d'equacions lineals pels valors de a = 3 i b = 6 fent servir el
mètode de Gauss-Jordan. c) Resoleu el sistema d'equacions lineals pels valors de a = –3 i b = 0 fent servir el
mètode de Cramer.
SOLUCIÓ:
a) Estudiem el rang de la matriu del sistema:
aa
3941111
211
.
Si a = –3, el rang de la matriu del sistema serà 2. En cas contrari, serà 3. D’altra banda, veiem que per a a = –3 el rang de la matriu del sistema es pot obtenir a partir de les primeres dues columnes, és a dir, que en aquest cas podem afirmar que la tercera columna és linealment dependent de les dues primeres. Estudiem ara el rang de la matriu ampliada:
Per a a –3, el rang de la matriu ampliada serà 3, ja que no pot ser menor que el
de la matriu del sistema, ni major a 3 (nombre d’equacions). Per a a = –3, verifiquem el rang de la matriu formada per les dues primeres
columnes de la matriu del sistema i el vector de termes independents de la matriu ampliada:
bb
231
111211
.
Si b = 0, el rang de la matriu ampliada serà 2, ja que la tercera i la quarta columna són linealment dependents de les dues primeres columnes d’aquesta matriu. En cas contrari, serà 3.
Resum de l’estudi:

50
a –3 i b = qualsevol valor Sistema compatible determinat. a = –3 i b = 0 Sistema compatible indeterminat. a = –3 i b 0 Sistema incompatible.
b) Apliquem Gauss-Jordan a partir de les transformacions elementals sobre la matriu
ampliada del sistema:
6 4311 1112 211
133122
FFFFFF
8 6201- 3202 211
233 FFF
9 9001- 3202 211
3)6/1(2)2/1(2 FFF
1 1001 0102 211
211 FFF
1 1001 0103 201
3211 FFF
1 1001 0101 001
.
Solució: x = i = z = 1.
c) El sistema és compatible indeterminat amb n – rang(A) = 3 – 2 = 1 grau de llibertat. Podem escollir com a incògnites principals x i i ja que la regió de les dues primeres columnes de A té rang 2, per tant:
1z 11
22z- 11 2
1111
.
321
21 1122
zz
z
x 1321
21 z 1221
z
z
y .

51
2.5.2. Exercicis proposats
Problema P.1
a) Discutiu segons els valors del paràmetre t, la compatibilitat o la incompatibilitat dels següents sistemes d’equacions lineals:
i. ii.
5x 11y 9z tx 3y 5z 22x 4y 2z 1 .
x ty z t 2x y tz 2t 1tx y z t .
b) Resoleu cadascun dels sistemes aplicant els mètodes següents: regla de Cramer i
mètode de la matriu inversa.
SOLUCIÓ:
a) t = 4 sistema compatible indeterminat: xz
yz
z
14 5
2
8 3
2, , .
t 4 sistema incompatible. b) t = 1 sistema incompatible. t = –2 sistema compatible indeterminat. t 1, t –2 sistema compatible determinat.
Problema P.2
Resoleu el següent sistema pel mètode que cregueu més convenient:
3x y z t 02x 3y z t 0x 2y 4z 2t 0
2x y 2z t 0 .
SOLUCIÓ:
(-3z , 15
4z , z ,
17
4z) , z .

52
Problema P.3 Aquest problema s’ha de lliurar
Donat el següent sistema d’equacions lineals:
22132
zyxazx
bzyx
.
a) Estudieu el sistema en funció dels paràmetres reals a i b. Feu un quadre resum
del tipus de sistema en funció dels valors dels paràmetres a i b. b) Resoleu el sistema en el cas a = 1 i b = 3, usant el mètode de Cramer o el de la
matriu inversa.
RESUM En aquesta sessió s’han presentat i proposat diferents problemes per fer l’estudi i la resolució de sistemes d’equacions lineals.

53
SESSIÓ 6: Definició d’espai vectorial
FITXA DE LA SESSIÓ Nom: Definició d’espai vectorial Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Definir què és un espai vectorial i conèixer prèviament les estructures algebraiques bàsiques necessàries per entendre correctament la definició.
CONTINGUTS En aquesta sessió es presenten, en primer lloc, les estructures de grup, d’anell i de cos, necessàries per poder entendre la definició d’espai vectorial que es fa posteriorment.
3. Espais vectorials
3.1. Estructures algebraiques bàsiques i definició d’espai vectorial
3.1.1. Estructures algebraiques bàsiques En aquest apartat estudiarem les estructures de grup, d’anell i de cos.
GRUP
Un grup és un parell (G, ) on G és un conjunt i
: G G
G
x y x y( , ) és una operació interna verificant les següents propietats:
Associativa: ( ) ( )x y z x y z x, y, z G . Existència d’element neutre: e x x GG e e x x , en
general, e 0 .

54
Existència d’element oposat (simètric): x G G x x x e, ' ' x' x , en general, x x' .
Si a més compleix: Commutativa: x y y x x, y G , diem que (G, ) és un grup commutatiu o abelià.
Exemples
(N, +) no és un grup. (Z, +) és un grup commutatiu. (Q, +) és un grup commutatiu. (R, +) és un grup commutatiu. (C, +) és un grup commutatiu. (Rn, +) és un grup commutatiu:
R x x x Rnn 1 2, , , , x i = 1, , ni .
(Cn, +) és un grup commutatiu. (Mnxm, +) és un grup commutatiu; (E, +) és un grup commutatiu. E = conjunt de funcions reals de variable real:
f x E( ) , f:R R x f(x)
(Pn, +) és un grup commutatiu. Pn = conjunt de polinomis de grau n:
P a a x a x a x Rn nn 0 1 2
2 a i = 1, ,ni , .
ANELL
Un anell és una terna (A, , ) on A és un conjunt i
: A A
Ax y x y( , ) i
: A A
Ax y x y( , ) són dues operacions internes
verificant: (A, ) grup commutatiu. Associativa respecte de : ( ) ( )x y z x y z x, y, z A . Existència d’element neutre: e x x AA e e x x en
general, e 1 . Distributiva:

55
x y z x y x z ( ) ( ) ( ) x, y, z A ( ) ( ) ( )x y z x z y z x, y, z A .
Si a més compleix: Commutativa respecte de : x y y x x, y A , diem que (A, , ) és un anell commutatiu o abelià.
Exemples
(Z, +, ·) és un anell commutatiu. (Q, +, ·) és un anell commutatiu. (R, +, ·) és un anell commutatiu. (C, +, ·) és un anell commutatiu. (Mnxn, +) no és un anell commutatiu.
COS
Un cos és una terna (K, , ) on K és un conjunt i
: K
K Kx y x y( , ) i
: K
K Kx y x y( , ) són dues operacions internes
verificant: (K, , ) anell. Existència d’element invers respecte de :
x K e K x x x e, ' ' x' x , en general, xx 1' .
Si l’anell (K, , ) és commutatiu, direm que (K, , ) és un cos commutatiu.
Exemples
(Z, +, ·) no és un cos perquè no existeix element invers respecte de ·. (Mnxn, +, ·) no és un cos perquè A Mnxn, si det(A) = 0, no existeix inversa. (Q, +, ·) és un cos commutatiu. (R, +, ·) és un cos commutatiu. (C, +, ·) és un cos commutatiu.
3.1.2. Definició d’espai vectorial Sigui (K, +, ·) un cos commutatiu, p. ex.: (R, +, ·) o (C, +, ·).

56
E és un espai vectorial sobre K si: (E, +) és un grup commutatiu amb una operació interna + (generalment suma):
: E
E Eu v u v( , )
que verifica:
Associativa:
( ) ( ) u v w u v w u v w , , E . Existència d’element neutre respecte de +:
E e E u e e u u u en general, e 0 .
Existència d’element oposat:
v E E v v v v e, ' ' v' en general,
v v' . Commutativa: u v v u u v , E .
I respecte d’una operació externa · (generalment producte):
: K (
E Eu u , )
que verifica:
Associativa respecte de ·:
( ) ( ) , u u K u E . Existència d’element neutre respecte de ·:
1 1 1K u u u u E .
Distributiva:
( ) ( ) ( ) , , u v u v K u v E ( ) ( ) ( ) ,
u u u K u E .
NOTES: 0 és l’element neutre de E respecte de +.
57
0 és l’element neutre de K respecte de +. Els elements del conjunt E s’anomenen vectors. Els elements del conjunt K s’anomenen escalars.
Propietats
1) Evv 00 .
2) 0 0 K .
3) 0 i/o 0= 0
vv . 4) ( ) 1 v v v E
v és l’oposat a v de E respecte de +.
3.1.3. Exemples d’espais vectorials
R2 és un espai vectorial sobre R
K = R és un cos commutatiu. (R2, +) és un grup commutatiu:
: R R R
2 2 2
( , )(( , ), ( , )) ( , )
u v u vu u v v u v u v1 2 1 2 1 1 2 2
que verifica:
Associativa:
( ) ( ) u v w u v w u v w R , , 2 . Existència d’element neutre respecte de +:
e = (e ,e ) R R
+ e , u + e ) = (u , u ) e = 0, e = 01 2
2
1 2 2 1 2 1 2
u e e u u u
u e u
2
1( .
Existència d’element oposat: u u u R u u u R u u u u u u( , ) , ( , ) ( ) ( , ) ( , )1 2
21 2
21 1 2 2 0 0 - .
Commutativa:
u v v u u v , R 2 . (R2, +, ·):

58
: R ((
R Ru u
u u u u
2 2
1 2 1 2
, ), ( , ) ( , )
verifica:
Associativa respecte de ·:
( ) ( ) , u u R u R 2 .
Existència d’element neutre respecte de ·:
1 1 1 2R u u u u R .
Distributiva:
( ) ( ) ( ) , , u v u v R u v R 2
( ) ( ) ( ) , u u u R u R 2 .
Rn és un espai vectorial sobre R
Aquest exemple és la generalització de l’exemple anterior. K = R és un cos commutatiu.
(R2, +) és un grup commutatiu:
: R R R
n n n
( , )(( , , , ), ( , , , )) ( , , , )
u v u vu u u v v v u v u v u vn n n n1 2 1 2 1 1 2 2
(R2, +, ·):
: R ((
R Ru u
u u u u u u
n n
n n
, ), ( , , , ) ( , , , )
1 2 1 2
Mnxm (conjunt de matrius amb n files i m columnes amb elements reals) és un espai vectorial sobre R
K = R és un cos commutatiu. (Mnxm, +) és un grup commutatiu:

59
: M M M
n m n m n m
( , )(( ), ( )) ( )
A B A Ba b a bij ij ij ij
que verifica:
Associativa:
( ) ( )A B C A B C A B C M n m , , . Existència d’element neutre respecte de +:
0 =
0 0
0 0 A
M A A A Mn m n m0 0 .
Existència d’element oposat:
A a M a M A a aij n m ij n m ij ij( ) , ( ) ( ) ( ) - A A 0 . Commutativa:
A B B A A B n m , M .
(Mnxm, +, ·):
: R ((
M MA A
a a
n m n m
ij ij
, ), ( )) ( )
verifica:
Associativa respecte de ·:
( ) ( ) , A A R A M n m . Existència d’element neutre respecte de ·:
A 1 1 1R A A A Mn m .
Distributiva:
( ) ( ) ( ) , ,A B A B R A B M n m ( ) ( ) ( ) , A A A R A M n m .

60
E (conjunt de funcions reals de variable real) és un espai vectorial sobre R
Sigui E el conjunt de funcions reals de variable real, és a dir:
f x E( ) , f:R R x f(x) .
K = R és un cos commutatiu. (E, +) és un grup commutatiu:
: E
E Ef g) f g
f x g(x f g)(x f x g(x( ,
( ( ), )) ( ) ( ) )
que verifica:
Associativa:
( ( )f g) h f g h f E , g, h . Existència d’element neutre respecte de +:
0:R R, 0 f x
E f f f E0 00 .
Existència d’element oposat:
-f(x) x 0))(()()))((f ( f- R,R: f- ,
xfxfxfEEf
.
Commutativa:
f g g f f E , g .
(E, +, ·):
: R ((
E Ef f
f x f x
, )
, ( )) ( )
verifica:
Associativa respecte de ·:
( ) ( ) , f f R f E . Existència d’element neutre respecte de ·:

61
f 1 1 1R f f f E . Distributiva:
( ( ) ( , ,f g) f g) R f g E ( ) ( ) ( ) , f f f R f E .
Pn (conjunt de polinomis de grau n de coeficients reals i variable real) és un espai vectorial sobre R
P p x a a x a x a x Rn nn ( ) ,0 1 2
2 a i = 1, , ni . Pn és un R-espai vectorial. K = R és un cos commutatiu. (Pn, +) és un grup commutatiu:
: P P P
n n n
( ( ), ( )) ( )( )( ), ( )) ( )( ) ( ) ( )
( ) ( ) ( )
p x q x p q xa a x b b x p q x p x q x
a b a b x a b xn nn
0 1 0 1
0 0 1 1
.
(Pn, +, ·):
: R (
(
P Pp x p x
a a x p x p x a a x a x
n n
nn
, ( )) ( )( )
, ( )) ( )( ) ( )
0 1 0 1 .
RESUM En aquesta sessió s’ha definit el concepte d’espai vectorial, i s’han presentat alguns exemples d’espais vectorials que es faran servir al llarg del curs.

62

63
SESSIÓ 7: Independència lineal de vectors i concepte de subespai vectorial
FITXA DE LA SESSIÓ Nom: Independència lineal de vectors i concepte de subespai vectorial Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS En aquesta sessió es tractaran els conceptes de dependència i independència lineal de vectors, de subespai vectorial i de subespai engendrat.
CONTINGUTS Els conceptes tractats en aquesta sessió són els següents: dependència i independència lineal de vectors, subespai vectorial i subespai engendrat. Cada definició d’un concepte nou està acompanyada de diversos exercicis d’exemple de l’aplicació del concepte.
3.2. Dependència i independència lineal de vectors
Sigui K un cos commutatiu.
3.2.1. Definició: combinació lineal Sigui E un K-espai vectorial,
v v v En1 2, , , i 1 2, , , n K ,
v v v v v En n i ii
n
1 1 2 2
1.
v és combinació lineal dels vectors
v v v n1 2, , , .

64
3.2.2. Definició: conjunt de vectors linealment independents
Sigui E un K-espai vectorial
S v v v En
1 2, , , , conjunt de vectors de E. S és un conjunt linealment independent de vectors de E si
1 1 2 2 1 20 0
v v v K n n i n solució única.
En cas contrari, és a dir, si algun i 0 tal que 1 1 2 2 0
v v vn n , S és un conjunt linealment dependent.
Proposició
v v v En1 2, , , són linealment dependents si un d’ells és combinació lineal dels altres.
1 1 2 2 0
v v v Kn n i
suposem i 0 ,
v v v v v vii
n ni
k kkk i
n
ik k
kk i
n
1 1 11 1 2 2
1 1
.
Exemple
v v v v v vn n n n1 2 2 1 2 2 10 1 i
Són linealment dependents.
Observacions
1) Un conjunt de vectors que conté el vector 0
és linealment dependent.
DEMOSTRACIÓ:
S v v n
0 2, , ,

65
i nK v v, 1 20 0 0 0
en particular és cert per 1 0 .
2) S S E1 2 conjunts de vectors de E, si S2 és un conjunt linealment independent S1 és un conjunt linealment independent. (Demostració trivial).
3.2.3. Exemples
Exemple 1
A R2 {(1, 0), (0, 1)} són linealment independents. DEMOSTRACIÓ:
1 21 0 0 1 0 0, , , 1 2 0 0, ,
1
2
00
linealment independents.
Exemple 2
En general, A Rn {(1, 0, ..., 0), (0, 1, ..., 0), ..., (0, ..., 0, 1)} són linealment independents.
Exemple 3
A R3 {(1, 1, 0), (0, 2, 3), (1, 0, 1)} són linealment independents.
DEMOSTRACIÓ:
1 2 311 0 0 2 3 1 0 1 0 0 0, , , , , , , ,
1 3
1 2
2 3
02 0
3 0
sistema d’equacions lineals homogeni,
A
1 0 11 2 00 3 1
sempre serà compatible, és a dir,
1 2 3 0 sempre serà solució, però no sempre única.
Són linealment independents una solució sistema compatible determinat, rang(A) = 3. Són linealment dependents solucions sistema compatible indeterminat.

66
Com que det(A) = 2 + 3 0 rang(A) = 3 sistema compatible determinat una solució 1 2 3 0 són linealment independents.
Exemple 4
A R3 {(–1, 1, 0), (5, 2, 3), (0, 7, 3)} són linealment dependents.
DEMOSTRACIÓ:
1 2 311 0 5 2 3 0 7 3 0 0 0 , , , , , , , ,
1 2
1 2 3
2 3
5 02 7 0
3 3 0 sistema d’equacions lineals homogeni, A
1 5 01 2 70 3 3
.
Com que det(A) = –6 + 21 – 15 = 0 rang(A) = 2 sistema compatible indeterminat solucions que compleixen:
2 3
1 3
3 3
5
una solució és 3 2 11 1 5 , , .
Comprovem que 5 11 0 1 5 2 3 1 0 7 3 0 0 0 , , , , ( ) , , , , són linealment dependents; com que rang(A) = 2, només hi ha 2 vectors linealment independents.
Exemple 5
A R3 {(1, 2, 3), (2, 1, 1)} són linealment independents.
DEMOSTRACIÓ:
1 21 2 3 2 1 2 0 0 0, , , , , ,
1 2
1 2
1 2
2 02 03 0
sistema d’equacions lineals homogeni, A
1 22 13 1
.
Com que det(A) = 1 – 4 0 rang(A) = 2 sistema compatible determinat són linealment independents.

67
Exemple 6
A R2 {(1, 2), (0, 1), (–1, 1)} són linealment dependents.
DEMOSTRACIÓ:
1 2 31 2 0 1 11 0 0, , , , ,
1 3
1 2 3
02 0
sistema d’equacions lineals homogeni, A
1 0 12 1 1 .
Rang(A) = 2 < 3 sistema compatible indeterminat solucions que compleixen:
1 3
2 33
.
Una solució és 3 2 11 3 1 , , . Comprovem que 1 1 2 3 0 1 1 1 0 0 0 , ( ) , , , són linealment dependents; com que rang(A) = 2, només hi ha 2 vectors linealment independents.
Exemple 7
Determineu el valor de a i b R per tal que u1 = (0, 2, 5), u2 = (1, 5, 3) i u3 = (a, b, 8) siguin linealment dependents. SOLUCIÓ:
8355210
ba
A .
u1, u2, i u3 són linealment dependents rang(A) 3 det(A) = 0.
det(A) = 0 12 55 3 8
6 5 25 16 19 5 16 0ab a b a a b
a ba
,16 19
5.
Exemple 8
Siguin .2 i 23 212211 eeueeu Demostreu que si 21 i ee
són linealment independents, 21 i uu
també ho són.

68
SOLUCIÓ:
Sabem que l.i.)són que ja única, (solució 0 i 0 212211 ee (*)
Volem comprovar si única) (solució 0 i 0 212211
uu :
0)2()23(
0)2()23(
221121
212211
ee
eeee
.
(*):
l.i.són i u única solució 0 SCD 02
0232121
21
21 u
Exemple 9
Comproveu si són linealment dependents o independents les següents matrius:
14
14 ,
1012
,12
01.
SOLUCIÓ:
dependents linealmentSón solucions infinites
llibertat degrau 1 amb S.C.I. 2)(
111402110421
0042
0042
0000
1414
1012
12
01
321
31
32
321
321
ARangA
Exemple 10
Són linealment independents els següents polinomis?
xxxxxx 2 ,13 ,22 222 .

69
SOLUCIÓ:
tsindependen linealmentSón única Solució ...
)()(
) () ()(
2
2
2
2
0DCS
3ARang012231
112ARang
02023
020x2x1x3x2xx2
321
1
31
31
23
221
.
3.3. Subespai vectorial
3.3.1. Definició de subespai vectorial
Sigui E un K-espai vectorial, un subconjunt no buit F E és un subespai vectorial de E si compleix:
1) u v F u v F, . 2)
u F u F, K . O equivalentment, si compleix:
u v F u v F
,, K .
Observacions
1) Sigui E un K-espai vectorial, F E K-espai vectorial, les operacions de E permeten definir unes operacions a F tals que F és un K-espai vectorial amb les mateixes operacions (interna i externa) definides sobre E.
2) Subespais trivials: E K-espai vectorial sempre té 2 subespais trivials: F E
0 és un subespai vectorial.
F E E és un subespai vectorial. 3) Tot subespai vectorial d’un espai vectorial E conté l’element neutre de E.

70
3.3.2. Exemples
Exemple 1
En R4 R-espai vectorial, F és un subespai vectorial de R4:
0,0,,=x 0 x,,, 214
434
4321 xxRxxRxxxxxF .
DEMOSTRACIÓ:
1)
x F
y F x y F
?
x F x x x x x x x x x
y F y y y y y y y y
1 2 3 4 4 1 2
1 2 3 4 4 1 2
0 0
0 0
, , , , , ,
, , , , , ,
x
y y3
3
x y x x y y x y x y F 1 2 1 2 1 1 2 20 0 0 0 0 0, , , , , , , , , .
2)
x F
R x F
?
x F x x x x x x x x x 1 2 3 4 4 1 2 0 0, , , , , , x 3
x x x x x F 1 2 1 20 0 0 0, , , , , , .
Exemple 2
En R3 R-espai vectorial, F és un subespai vectorial de R3:
F x x x x R x x x R x x x x
1 2 33
1 23
1 2 1 2, , , , x x =3 .
DEMOSTRACIÓ:
1)
x F
y F x y F
?
x F x x x x x
y F y y y y y
1 2 1 2
1 2 1 2
, ,
, ,
x y x x x x y y y y
x y x y x y x y F
1 2 1 2 1 2 1 2
1 1 2 2 1 1 2 2
, , , ,
, , .

71
2)
x FR x F
?
x F x x x x x 1 2 1 2, , x x x x x x x x x F 1 2 1 2 1 2 1 2, , , , ( ) .
Exemple 3
Demostreu que F és un subespai vectorial de 22xM .
}{ 22
baba
baAMAF x .
SOLUCIÓ:
vectorialsubespai és )()()()(
?)()()()(
?
21212121
2121
22112211
2121
2222
22
1111
11
FFbbaabbaa
bbaa
Fbabababa
bbaa
Fbaba
bababa
ba
.
Exemple proposat
Demostreu que, en R3 R-espai vectorial, F no és un subespai vectorial de R3.
21213
213
321 xx9xxRxxx9RxxxxF ,,=x x,, 3 .
3.4. Subespai engendrat
3.4.1. Definició de subespai engendrat
Sigui E un K-espai vectorial, S v v v En
1 2, , , conjunt de vectors de E, anomenem subespai engendrat per S el conjunt de tots els vectors que es poden expressar com a combinació lineal dels vectors de S:
S v v v v E v v v v K i nn n n i
1 2 1 1 2 2 1, , , , , , .

72
Propietats
S E és un subespai vectorial de E. S S (els vectors iv estan inclosos en < iv >). S és el més petit dels subespais vectorials de E que contenen S.
F Es e v S F. . . S F .
IMPORTANT: Sigui E un K-espai vectorial, S E un subconjunt de vectors linealment determinats.
S v v v vr n
1 2, , , , , amb r < n vectors linealment indeterminats.
S v v v v v vn r
1 2 1 2, , , , , , .
3.4.2. Exemples
Exemple 1
Trobeu l’expressió general d’un vector x ( , , ), ( , , )1 0 1 1 1 2 en R3 R-espai vectorial.
SOLUCIÓ: x x y z ( , , ) ( , , ) ( , , ) ( , , ) 1 0 1 11 2 2
xy
z2
1 10 11 2
xyz
el sistema ha de ser compatible
rang(A) = 2 = rang(A’)
1 10 11 2
0
xyz
z – i – x – 2i = 0 z = x + 3i.
Exemple 2
En P3[x] R-espai vectorial, trobeu l’expressió general d’un element de S on:
S x x x x x 1 23 2, , .
SOLUCIÓ:
p x a a x a x a x S( ) 0 1 22
33 ,

73
p x x x x x x x x x( ) ( ) ( ) ( ) ( ) ( ) 1 2 23 2 2 3 ,
2 0
1
2
3
aa
aa
busquem 3210 ,,, aaaa tals que el sistema sigui compatible
rang(A) = 3 = rang(A’) det(A’) = 0.
f2 = f2 + f1 apliquem adjunts i fem f1 = f1 + f3
A
aaaa
aa a
aa
a a aaa
a a a a a a a a a a a a
'
( )
1 0 21 1 1
0 0 10 1 0
1 0 20 1 10 0 10 1 0
0 10 11 0
1
0
1
2
3
0
0 1
2
3
0 1 3
2
3
2 0 1 3 0 1 2 3 3 2 1 0 = .
S p x P x a a x a x a x a a a ( ) [ ]3 0 1 22
33
2 1 0 p(x) i a 3 . Podem comprovar la condició en els elements de S.
Exemple 3
Trobeu l’expressió general dels vectors que pertanyen als subespais:
S
S1
2
1 2 0 31 2
0 1 3 11 1
( , , ), ( , , )
( , , ), ( , , ) en R3 R-espai vectorial.
SOLUCIÓ:
De fet, ens demanen:
21213 SSx x=Sx i Sx Rz)y,(x,=x
. Calculem la condició que han de complir els vectors de S1:
)S de vectors(condició 0524z20y12x31
compatibleser de ha sistema El 22
3)2,1,3()0,2,1(),,(
1
zyxz
yx
zyx
.

74
Calculem ara la condició que han de complir els vectors de S2:
)S de vectors(condició 034z1-3y11x10
compatibleser de ha sistema El 3
)1,1,1()3,1,0(),,(
2
zyxz
yx
zyx
.
Per tant, els vectors que pertanyin a la intersecció de S1 i S2 han de complir les dues condicions alhora:
zxzyzyx
zyx4
17 i 6034
0524
.
Així, els vectors que pertanyen a S1 i S2 a la vegada tenen la forma:
),6,4
17( zzz .
RESUM En aquesta sessió hem vist el concepte d’independència lineal entre vectors, i també hem introduït els conceptes de subespai vectorial i de subespai engendrat.

75
SESSIÓ 8: Exercicis de subespais vectorials i de dependència i independència lineal de vectors
FITXA DE LA SESSIÓ Nom: Exercicis de subespais vectorials i de dependència i independència lineal de
vectors Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior s’han presentat els conceptes de dependència i independència lineal de vectors i de subespai vectorial. En aquesta sessió es posaran en pràctica aquests conceptes.
OBJECTIUS Aplicar els conceptes estudiats a la sessió anterior.
CONTINGUTS En aquesta sessió es presenten exercicis resolts com a exemples, i es proposen exercicis nous per aplicar els conceptes presentats a la sessió 7.
3.5. Exercicis
3.5.1. Exercicis resolts
Problema R.1
Comproveu si el conjunt F = {(x, i, z) R3 / x + i + z = 9} és o no és un subespai vectorial de R3.

76
SOLUCIÓ:
Per comprovar si F és un subespai vectorial de R3 cal demostrar que es compleix:
FxFxKFxxFxx
, )2(, )1(
.
Siguin Fxx ',
, i per tant, amb components que verifiquen x x x1 2 3 9 i 9''' 321 xxx :
cal comprovar si Fxx
.
332211321321 ',','',',',, xxxxxxxxxxxxxx
918''' 332211 xxxxxx . Per tant, Fxx
i el conjunt F = {(x, i, z) R3 / x + i + z = 9} no és un subespai
vectorial, ja que no compleix almenys una de les condicions necessàries. També s’hauria pogut resoldre de forma ràpida comprovant que l’element neutre (0, 0, 0) no pertany a F (sabem que tot subespai vectorial conté l’element neutre).
Problema R.2
Quin valor ha de tenir a perquè el vector (1, a, 3) pertanyi al subespai engendrat per (1, 1, 0) i (2, 1, 2)?
SOLUCIÓ:
Posarem el vector (1, a, 3) com a combinació lineal de (1, 1, 0) i de (2, 1, 2) i forçarem que el sistema sigui compatible:
1 3 11 0 2 121 2, , , , , ,a . Obtenim el següent sistema d’equacions lineals:
12320
11121
)'(det32
12
2
21
21
aaAa
a = –1/2.
Si a = –1/2, rang(A) = rang(A') = 2 sistema compatible
(2,1,2) , (1,1,0))3,2/1,1( . Si a –1/2, rang(A) < rang(A') sistema incompatible (2,1,2) , (1,1,0))3,,1( a .

77
Problema R.3
Sigui F un subespai vectorial de l'espai vectorial C3 sobre R.
jcjbbazjcjabazbazCzzzF 3213
321 , , ),,( . a) Trobeu un sistema de generats del subespai F. b) Pertany el vector (0, 1 + 2j, –1 + j) a F?
SOLUCIÓ:
a) Si descomponem el vector genèric de F en una combinació lineal:
jjcjbjajcjbbajcjababazzz ,,01,1,11,1,1 ) , ,(),,( 321 ,
trobem el sistema de generats del subespai F:
j)j,(0,j),-(1,1,-1j,-1),(1,1F .
b) Per tal de comprovar si el vector (0, 1 + 2j, –1 + j) pertany a F, cal verificar si es pot generar a partir del sistema calculat al primer apartat.
jjcjbjajj ,,01,1,11,1,1 1,21,0 .
S’obté el sistema d’equacions:
jj
cba
jjjj
121
0
1111
011.
És un sistema incompatible, ja que det(A) = 0 i rang(A) = 2 < rang(A’) = 3, per tant, no pertany a F.
3.5.2. Exercicis proposats
Problema P.1
Sigui K[x] l'espai vectorial dels polinomis amb coeficients en K. Demostreu que el subconjunt Kn[x] format pels polinomis de grau n és un subespai vectorial.

78
Problema P.2
Comproveu si en l'espai vectorial P3[x] dels polinomis de 3 sobre , els següents vectors són linealment independents: u1 = 1 + 2x ,
u2 = -1-2x2 , u3 = -2x + 2x2.
SOLUCIÓ:
Són linealment dependents.
Problema P.3
Trobeu el valor de a i b perquè que el vector (a, 2, 5, b) (1, 2, 0, 3), (2, 1, 1, 0).
SOLUCIÓ:
a b 17
29
2, .
Problema P.4
Demostreu si el conjunt de vectors {(1, 0, 2/3), (3, 2, 1), (0, 1, 5)} és un sistema de generats de 3 .
SOLUCIÓ:
Són generats de 3 .
Problema P.5
Considereu els següents subconjunts de l'espai vectorial de les funcions de variable real sobre :
A = {f(x) / f(x) = 0 si x > 0}. B = {f(x) / f(x) = 0 si x 0}.
Demostreu que A i B són subespais vectorials de .

79
Problema P.6
Sigui V l'espai vectorial de les funcions reals de variable real sobre el cos dels reals. Donats tres vectors linealment independents f(x-), g(x), h(x) V, determineu si els vectors resultants de sumar-los de dos en dos f(x) + g(x), f(x) + h(x), g(x) + h(x) també ho són.
SOLUCIÓ:
Sí són linealment independents.
Problema P.7
Sigui R4 un espai vectorial sobre R, digueu quina relació existeix entre les components d'un vector qualsevol del subespai (0, 1, 2, 3), (–1, 1, 2, –2), (–2, –1, 1, 2).
SOLUCIÓ:
(x, i, z) / 5x – 7i + 5z – t = 0.
Problema P.8 Aquest problema s’ha de lliurar
En l'espai vectorial R3 sobre R considerem dos subespais E1 i E2:
E1 = (1, 1, 1), (1, –1, 1) i E2 = (1, 2, 0), (3, 1, 3). a) Trobeu el conjunt de vectors que pertanyen a E1 E2 b) Comproveu que E1 E2 és un subespai vectorial de R3.
RESUM En aquesta sessió s’han presentat i proposat diferents problemes per aplicar els conceptes de subespai vectorial i de dependència i independència lineal.

80
81
SESSIÓ 9: Base i dimensió d’un espai vectorial i concepte de components d’un vector en una base
FITXA DE LA SESSIÓ Nom: Base i dimensió d’un espai vectorial i concepte de components d’un vector
en una base Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS L’objectiu fonamental d’aquesta sessió és que l’alumne sàpiga diferenciar clarament entre un vector i un vector expressat en components respecte d’una base donada. Com es veurà més endavant, aquests conceptes són imprescindibles per entendre els nous conceptes que es presentaran a les sessions posteriors.
CONTINGUTS En aquesta sessió es presentaran dos conceptes molt importants: base d’un espai vectorial, i components d’un vector en una base donada. També es defineix el concepte de dimensió d’un espai vectorial.
3.6. Base i dimensió d’un espai vectorial
3.6.1. Base d’un espai vectorial Sigui E un espai vectorial sobre un cos commutatiu K i sigui B un subconjunt de E. B és una base de E si: a) <B> = E. b) Els elements de B han de ser linealment independents de E.
Una base té el mínim nombre de vectors amb els quals podem generar E. La base té el màxim nombre de vectors linealment independents que es poden
agrupar dins de E. Totes les bases d’un espai vectorial tenen el mateix nombre d’elements.

82
Exemples de bases (bases canòniques): En R2: {(1, 0) (0, 1)}. En R3: {(1, 0 ,0) (0, 1, 0) (0, 0, 1)}. En l’espai de polinomis P2(x): {1, x, x2}.
Exemple 1
Comproveu si el conjunt B = {(–1, 2, 1) (1, 3, 0) (2, –4, –1)} és una base de R3. SOLUCIÓ: Condicions que han de complir:
a) Generen R3. El vector genèric de R3:
Per poder expressar x com a combinació lineal de B han d’existir , i . Com que volem trobar les incògnites, farem un sistema d’equacions que ha de ser un sistema compatible. Amb dos rangs iguals: rang(A) = rang(A’). Els dos rangs són iguals: rang(A) = rang(A’) = 3.
L’espai que hem generat pels vectors de B és tot 3, ja que qualsevol vector x = (x, i, z) podem expressar-lo com a combinació lineal dels vectors de B.
b) Són linealment independents.
x x y zx Bx y z
( , , )
( , , ) ( , , ) ( , , ) ( , , )
3
1 2 1 1 3 0 2 4 1
...3)(4322
DCSARangoz
yx
1 1 22 3 41 0 1
xyz
00432
020
0)1,4,2()0,3,1()1,2,1(
31
321
321
321
321

83
El sistema és compatible determinat. Es compleixen les dues condicions necessàries perquè B sigui una base de 3. En conseqüència, podem dir que és una base de 3.
Exemple 2:
Són (–1, 2, –1) (1, 3, 0) una base de 3? SOLUCIÓ: a) Generen tot 3 ?
zyx
32
zyx
013211
.
Es tracta de veure quan serà un sistema compatible, atès que serà llavors quan podrem expressar el vector (x, i, z) com a combinació lineal dels vectors mencionats. La condició perquè un sistema sigui compatible és: rang(A) = rang(A’). Rang(A) = 2 Perquè el rang(A') també sigui 2, s’ha de complir:
Com s’observa, per a alguns vectors, és a dir, per a alguns valors de x, i, z, que no compleixen la condició anterior, tindrem un sistema incompatible, és a dir, que aquestos vectors de R3 no pertanyeran a l’espai engendrat per (–1, 2, –1), (1, 3, 0). Per tant, no es generaran tots els vectors de R3; no compleix la primera premissa per ser una base: ser sistema generat.
3.6.2. Dimensió d’un espai vectorial La dimensió d’un espai vectorial E és el nombre d’elements que conté una base de E. És a dir, el màxim nombre de vectors linealment independents que podem agrupar dins de l’espai vectorial. Si tenim un espai vectorial en el qual qualsevol de les seves bases contenen infinits elements, direm que aquest espai vectorial és de dimensió infinita. Si té n elements direm que té una dimensió n o finita.
1 12 31 0
0 3 3 2 5 3 0xyz
z y x z z y x

84
Teorema
Si E és un espai vectorial de dimensió finita i F és un subespai inclòs en E, direm que: F és un subespai vectorial de E de dimensió finita tal que la dimensió de F serà
menor o igual a la de E. Si la dimensió de F és igual a la dimensió de E, llavors F és igual a E.
dim{F} = dim{E} F = E.
Conseqüències
1. Sigui E un espai vectorial de dimensió finita n i sigui nuuuU
,, 21 un conjunt de n vectors linealment independents dins de l’espai vectorial E U és una base de E.
DEMOSTRACIÓ:
Qualsevol vector inclòs en E és ld. de U ja que U té n vectors linealment independents (el màxim nombre d’elements linealment independents que pot agrupar en E. Si U tingués u + 1 elements no podrien ser linealment independents). 2. La dimensió d’un espai vectorial no varia, no depèn de la base que escollim.
3.7. Components d’un vector de E en una base B de E
Sigui E un espai vectorial sobre K. Sigui B una base de E nbbbB
,, 21 .
nn bbbxEx
2211 .
Siguin i les components o coordenades del vector x en la base B. El vector x en base B es representa del següent mode:
Bx = (1, 2,..., n) |B.

85
Proposició
x E, donada una base B de E, les components del vector x referides a la base B són úniques.
DEMOSTRACIÓ:
Suposem que no ho són:
nnnn bbbbbbx
22112211 .
Essent ,
En un conjunt de vectors linealment independents aquesta expressió es compleix només si els coeficients són 0.
Es complirà quan (i = i).
Exemple 1
(1, 2) |B ¿és de 2?
SOLUCIÓ:
Dependrà de B. Per exemple:
0041
0020
20001
1x
0020
0001
B
.
Exemple 2:
Sigui el vector x = 2x2 + 3x – 1 i la base B1 = {1, x, x2}. a) Components de x en la base B1?
0)()()( 0 222111
nnn bbbxx

86
SOLUCIÓ:
x = 2x2 + 3x – 1 = 1 + 2x + 3x2
1
2
3
3211
132
,,
B
x
113 )2,3,1(132
BBxxxx
. b) Components de x en B2 sent B2 = {x2, x ,1}?
SOLUCIÓ:
22
3
2
1
322
12
322
1
22
2
)1,3,2(1
32
11321
1,,132
BBx
xxxxxxx
xxBxxx
.
Exemple 3:
Calculeu les components del vector
3023
x en la base
0111
,3201
B .
SOLUCIÓ:
0111
3201
3023
)2,1(x 2 1 ...
3302
23
BDCS
.

87
RESUM En aquesta sessió s’han presentat els conceptes de base i de components d’un vector en una base. Aquests són conceptes fonamentals per entendre conceptes futurs.

88
89
SESSIÓ 10: Canvis de base
FITXA DE LA SESSIÓ Nom: Canvis de base Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior hem vist que un vector es pot expressar en components respecte de qualsevol base de l’espai al qual pertany. En aquesta sessió veurem la forma de trobar aquestes components en una base B2 si coneixem ja les seves components en una altra base B1.
OBJECTIUS L’objectiu perseguit en aquesta sessió és el d’aprendre a fer canvis de base. És a dir, saber calcular les components d’un vector en una base B2 si coneixem ja les seves components en una altra base B1.
CONTINGUTS Concepte de canvi de base i matriu de canvi de base.
3.8. Canvis de base
3.8.1. Introducció
Considerem el següent exemple. Suposem que ens donen un vector p expressat en components respecte d’una base B1 i es tracta de trobar les seves components en la base B2. Una forma de fer-ho aplicant el que ja sabem seria trobar primer el vector p i després buscar quins components tenen en la base B2.

90
xxp
pxB
xB
B
1*2)2(*1
)2,1(4,2
1,2
1
2
1
.
Per tant, ara es tracta de trobar les components que tenen en la base B2, és a dir, trobar 1 i 2, que ens permetran expressar el polinomi p com a combinació lineal dels elements de la base B2.
2
1
21
4021
42
xx
.
Llavors, les components del polinomi p en la base B2 són:
)0,( 21
2Bp .
Però existeix una altra forma de trobar les components del polinomi p en la base B2 si coneixem les seves components en la base B1. Vegem-la amb detall al punt següent.
3.8.2. Matriu de canvi de base Siguin B1 i B2 dos bases diferents de l’espai vectorial E. x E ho podem escriure com a combinació lineal d’una de les dues bases o de les dues.
n212
n211
v,v,v=u,u,u=
BB
),,,(
),,,(
21
2211
21
2211
2
1
nB
nn
nB
nn
xuuux
xuuux
.
Què es vol? Volem trobar les components de x en la base B2 a partir de les components que tenen en la base B1.
21 BB xx .
Cal que coneguem les components dels vectors de la base inicial B1 referides a la base final B2. Expressem els vectors de la base n211 u,u,u=
B com a combinació lineal de la
base destí n212 v,v,v=
B .

91
n
kkiki
nnnnnn
nn
nn
vbu
vbvbvbu
vbvbvbuvbvbvbu
1
2211
22221122
12211111
.
Un vector x expressat com a combinació lineal de B1 seria:
n
iiiux
1
.
I expressat com a combinació lineal de B2:
n
iii vx
1
, on les i són les components que busquem.
Doncs bé, si partim de:
n
iiiux
1
,
i apliquem el que sabem,
n
kkiki vbu
1
,
tenim:
n
k
n
kkkkkii
n
k
n
ikik
n
ii
n
iii vvbvbux
1 11 111
;)(
llavors:
n
ixiix b
1
,
on k són les components de x en la base destí B2; ikb són les components dels n
vectors de la base origen B1 en la base destí B2; i i són les components de x en la base origen B1. Per tant, ja podem calcular les components del vector x en la base destí sabent les components de x en la base origen i sabent les components dels vectors de la base origen, referides a la base destí. El sumatori anterior podem expressar-lo com a producte de dos matrius:

92
nnnn
n
n bb
bbbb
2
1
1
21
11211
21
1
1212 BBBBxCx
. Essent 21 BBC la matriu de canvi de base de B1 a B2.
),,,( 21 n són les components de x en la base origen B1.
),,,( 21 n són les components de x en la base destí B2. Observació: Les columnes de 21 BBC són les components dels vectors de la base origen referides a la base destí. NOTA: per a tota base B1, B2 de E, les matrius de canvi de base són invertibles (tenen inversa).
nilvectoresdenRango ..º . Es fonamenta en què els vectors de la base origen són linealment independents entre ells, i els de la base destí també ho són entre ells, per definició de bases, les components dels vectors de la base origen, referides a la base destí, també seran linealment independents entre elles. Per tant, sempre podrem trobar la matriu inversa: 1
21
BBC .
Particularitats de 121
BBC :
Tenim que: Tal que:
1212 BBBBxCx
. Si multipliquem per 1
21
BBC les dues parts de la igualtat,
B2 B1 21 BBC

93
11211
2121
21 ····BBBBBBBBB xxCCxC
. Per tant, 12
121 BBBB CC
, és a dir, la matriu inversa és la matriu de canvi de la base B2, origen de la base B1 destí.
RESUM En aquesta sessió s’ha presentat el concepte de canvi de base, i s’ha explicat com calcular la matriu que ens permet fer aquest canvi de base de forma senzilla.

94

95
SESSIÓ 11: Exercicis de vectors expressats en components i de canvis de base
FITXA DE LA SESSIÓ Nom: Exercicis de vectors expressats en components i de canvis de base Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Posar en pràctica els conceptes tractats a les dues sessions anteriors.
CONTINGUTS En aquesta sessió es presenten alguns exercicis resolts a tall d’exemple i se’n proposen d’altres per ser resolts per l’alumne. En aquests exercicis s’han d’aplicar els següents conceptes: base i dimensió d’un espai vectorial, components d’un vector en una base i canvis de base.
3.9. Exercicis de vectors en components i de canvis de base
3.9.1. Exercicis resolts
Problema R.1
Considereu el subespai definit com:
12542135
54321 32 x;32 x,,,, xxxxxxxxxxF . Trobeu una base d’aquest subespai i completeu-la fins a obtenir una base de 5.

96
SOLUCIÓ:
(x1, x2, 2x1 + 3x2 – x4, x4, 2x2 – 3x1) = x1(1, 0, 2, 0, –3) + x2(0, 1, 3, 0, 2) + x4(0, 0, –1, 1, 0).
Verifiquem que els vectors d’aquesta combinació lineal són linealment independents per tal de comprovar si són tots part d’una possible base. Ho fem a través del rang, comprovant si el menor de 3x3 de la matriu formada per les 3 primeres components dels 3 vectors és diferent de zero:
.
Per tant, una possible base de F és:
1 0 2 0 3 0 1 3 0 2 0 0 1 1 0 , , . Per completar la base fins a 5, només ens caldria inserir dos vectors independents més; per tal d’aconseguir qualsevol valor per a x3 i per a x5 (les úniques components en què en F s’imposen condicions lineals). 1 0 2 0 3 0 1 3 0 2 0 0 1 1 0 0 0 1 0 0 0 0 0 0 1 , , , ,
. Calculant el determinant de la matriu formada pels 5 vectors, o bé transformant la matriu per Gauss, podem comprovar com aquests 5 vectors són linealment independents.
Problema R.2
Sigui E un espai vectorial sobre R. Considerem BE = 21 , aa una base de E. Considerem 211 a -a2 e i 212 a a- e . a) Comproveu que CE = 21 , ee és una base de E. b) Calculeu la matriu de canvi de base de BE a CE. c) Calculeu les components del vector 21 23 aau referides a la base CE.
SOLUCIÓ:
a) BE = 21 , aa base de E 2dim E .
Demostrem primer que 21,ee són linealment independents.

97
?00 212211 ee
022 2121212122112211
aaaaaaee .
Atès que 21 , aa és un conjunt linealment independent, l’única solució és:
0
002
2112
21
.
E. de base una és 2dim
l.i.conjunt un és , 21E
E CE
eeC
b) Hem d’expressar els vectors de CE com a combinació lineal dels vectors de BE.
Una opció és invertir la matriu de canvi de base de CE a BE, que s’expressa directament a partir de les equacions de l’enunciat:
2111
1112 1
1EEEE BCCB MM .
c) De l’enunciat deduïm directament que les components de u respecte de BE són:
23
EBu .
Per tant, cal fer un canvi de base de BE a CE utilitzant la matriu trobada a l’apartat anterior:
11
23
2111
EEEE BCBC uMu .
Problema R.3
Sigui F un subespai vectorial de l’espai vectorial de matrius de 2x2 (espai vectorial sobre R). Siguin B1 i B2 bases de F:
0111
,0011
,1002
0102
,1011
,1013
2
1
B
B
.
a) Si
1035
A , trobeu 1B
A .

98
b) Calculeu la matriu de canvi de base de la base 1 a la base 2. c) Sabent que una matriu B expressada en components referides a la base 2 és
)2,4,3(2
B
B . Quina és la matriu B?
SOLUCIÓ:
a) Expressem A com a combinació lineal dels elements de B1:
0102
1011
11
03
13
05
cbaA .
Obtenim el sistema:
5 = 3a + b + 2c 3 = a – b
0 = c 1 = a + b.
I resolent-lo obtenim : a = 2, b = –1, c = 0. Per tant A |B1 = (2, –1, 0) (A en la base B1). b) Per calcular la matriu de canvi de base, expressem els vectors de B1 en la base B2
i solucionem els sistemes d’equacions que ens queden:
0,1,101
11
01
01
10
02
1013
cbacba .
0,1,101
11
01
01
10
02
1011
fedfed .
1,1,001
11
01
01
10
02
0102
ihgihg .
Així, la matriu de canvi de base és:
100111011
21BBM .
c) Obtenim la matriu B com la combinació lineal dels elements de B2 a partir de les
seves components referides a aquesta mateixa base:
36
28
01
11
201
01
410
02
3B .

99
Problema R.4
Els dissenyadors de peces de cotxes o d’avions utilitzen freqüentment un conjunt de polinomis anomenat polinomis de Bernstein. Aquests polinomis, convenientment combinats, donen lloc a corbes suaus que s’utilitzen per crear peces mecàniques per ordinador. Els polinomis de Bernstein són els següents (dibuixats a l’esquerra i expressats a la dreta):
2
3
22
21
)(
22)(
21)(
xxpxxxp
xxxpB .
Són, per tant, una base de funcions de l’espai vectorial P2(x) amb coeficients reals i cos commutatiu . a) Quines són les components del polinomi p(x) = 5x + 10x2 respecte de B? b) La següent matriu Mc és la matriu de canvi de base de la base B a una altra base
anomenada D.
112022001
cM .
Deduïu quins són els polinomis que integren la base D. c) Una altra família de polinomis semblants als de Bernstein és el conjunt de
Lagrange:
)5.0(2)()1()(
)1)(5.0(2)(
3
2
1
xxxpxaxxp
xxxpE .
Quin valor ha de tenir a perquè siguin una base?
SOLUCIÓ:
a) Volem expressar el polinomi p(x) en la base B, per tant, volem trobar a, b, c, tals que la següent igualtat sigui certa:
p(x) = 5x + 10x2 = a (1 – 2x +x2) + b (2x – 2x2 ) + c x2
= a + (2b – 2a) x + (a – 2b + c) x2.
Igualant coeficients obtindrem un sistema i resolent-lo obtindrem els valors de a, b, c:

100
a = 0
2b – 2a = 5 a – 2b + c = 10.
Obtenim: a = 0, b = 5/2, c = 15. Així, p(x) |B = (0, 5/2, 15 ) (expressat en la base B). b) Anomenem q1, q2, q3 els polinomis que formen la base D. Per a la construcció de
la matriu de canvi de base hem de resoldre:
1 – 2x + x2 = 1q1 – 2q2 – 2q3 2x – 2x2 = 2q2 + q3
x2 = q3.
Resolent aquest sistema obtenim els tres polinomis:
q1 = 1 , q2 = x – 3/2x2, q3 = x2.
Per tant, la base és D = {1, x–3/2x2, x2}. c) Sabem que P2(x) té dimensió 3, llavors, si veiem per a quin valor de a els tres
polinomis són linealment independents, ja podrem afirmar que són base. Usem la definició d’independència lineal:
1 (2(x–1/2)(x –1) ) + 2 (–ax(x–1)) + 3(2x(x–1/2)) = 0.
Operant i reagrupant els termes adequadament obtenim el polinomi:
x2 (21 – a 2 + 23) + x (–31 + a2 - 3 ) + 1 = 0. Igualem els coeficients a 0 i obtenim un sistema que té per matriu associada:
01
2
013
2aa
A .
Volem veure quan el sistema és compatible determinat perquè llavors la solució 1 = 2
= 3 = 0 (que existeix per ser homogeni el sistema) serà única.
det(A) = –a = 0.
Aleshores, si a 0, el rang(A) = 3 i rang(A’) = 3 (no oblidem que és un sistema homogeni) i, per tant, el sistema és compatible determinat. Així, si a 0 els tres polinomis formen una base de P2(x).

101
Problema R.5
Sigui xP2 l’espai vectorial dels polinomis de grau 2 amb coeficients reals. Siguin:
022 baxPcxbxaF i 222 21,,21 xxxxxxG
dos subespais vectorials de xP2 . Calculeu: a) Una base i la dimensió de F . b) Una base i la dimensió de G . c) Una base i la dimensió de GF .
SOLUCIÓ:
a) L’enunciat ja ens dóna la condició dels vectors de F:
20 cxaxababa forma dels vectors. Per tant, la base serà: 2,1 xx (generen F i són linealment independents). I la dimensió és 2. b) Ens donen un conjunt de vectors generat de G. Falta comprovar que siguin
linealment independents:
.....000)21()()21(
321
23
22
21
DCSilnomésionxxxxxx
La matriu del sistema d’equacions resultant és:
211112101
.
Per tant, perquè sigui un sistema compatible determinat hauria de ser de rang igual a 3.
0...211
112101
no són linealment independents.

102
Com es pot observar, els dos primers ho són i per tant podem dir que una base de G serà:
22 ,21 xxxx , i la dimensió és 2. c) Els vectors que pertanyin a la intersecció hauran de complir la condició per a
pertànyer a tots dos subespais. La condició de pertinença al subespai F ja la sabem: 0 ba . Falta trobar la condició de pertinença a G, que la resoldrem imposant que un vector genèric de P2(x) sigui combinació lineal de la base trobada a l’apartat anterior.
)()21( 2
22
12 xxxxcxbxa .
El sistema ha de ser compatible (i de fet, determinat, perquè els dos vectors són base de G). Per tant, rang(A) = rang(A’) = 2. Com que rang(A) = 2, això implica que hem de forçar que rang(A’) = 2.
03...0111201
cbacba
(condició per pertànyer a G).
Per tant, com que els vectors de la intersecció han de complir les dues condicions,
acba
cbaba
2030
els polinomis seran de la forma: 22axaxa .
Aleshores, una possible base seria:
221 xxGFBase , i la dim( GF ) = 1.
Problema R.6
Sigui 22xM l’espai vectorial sobre de les matrius de dues files i dues columnes i siguin:
3502
,11
00,
1102
,1001
F subespai vectorial de 22xM .
0011
,11
1,
1010
,110
1
aaB a .
1111
,1021
,0010
,1010
2B base de 22xM .
a) Trobeu una base i la dimensió de F.

103
b) Valors de a per als quals B1 és una base de 22xM . Per a a = 1 resoleu els següents apartats: c) Calculeu la matriu de canvi de base de B2 a B1. d) Sigui 22 xMA amb components respecte de B1: )1,8,7,2(
1BA . Trobeu les
components de A respecte de la base B2. Podeu afirmar que ?FA (Justifiqueu la resposta).
SOLUCIÓ:
a) Sabem que són generats. Verifiquem si són linealment independents fent ús de la definició:
.
Volem veure que 1 = 2 = 3 = 4 = 0 és l’única solució. Escrivim el sistema resultant:
1 + 2 2 + 24 = 0 2 +3 +5 4 = 0
1 + 2 - 3 -34 = 0,
que escrit de forma matricial és:
.
Si calculem ara el rang de la matriu del sistema i de la matriu ampliada tenim:
rang(A) = rang(A’) = 2.
Així, el sistema és compatible indeterminat i, per tant, té infinites solucions. Les quatre matrius són linealment dependents. A més, amb el càlcul del rang sabem que tenim dues matrius linealment independents. Prenem doncs, dues matrius linealment independents i sabem que:
.
Aquestes dues darreres matrius són linealment independents, ja que l’element a21 és nul per a la primera i no nul per a la segona. Així, ja tenim una base de F i la dimensió:
.
b) Els elements de B1 han de ser generats i linealment independents. Per tant, atès que són quatre matrius i que coincideixen amb la dimensió de l’espai vectorial
22xM , imposem només la condició d’independència lineal, fent que el següent sistema homogeni sigui compatible determinat:

104
.
Si escrivim el sistema de forma matricial tenim:
.
Imposem que el determinant del sistema sigui zero per identificar quan el sistema és compatible indeterminat, i en cas contrari serà determinat:
.
Així, per a a ½ el det(A) 0, per tant, el sistema és compatible determinat i l’única solució és 1 = 2 = 3 = 4 = 0. Aleshores, en conclusió, el conjunt B1 és linealment independent i, per tant, és una base també per a ½. Recordem que la dimensió d’un espai vectorial és el màxim nombre de vectors linealment independents, i que qualsevol conjunt de vectors linealment independents d’un espai vectorial de dimensió n, i que estigui format per n vectors linealment independents serà un generat i, per tant, també una base d’aquest espai vectorial.
c) Hem d’expressar els vectors de la base B2 en components referides a la base B1 i,
atès que es tracta de quatre sistemes d’equacions amb la mateixa matriu de coeficients, podem realitzar la resolució de forma conjunta per Gauss-Jordan o calculant una única inversa per simplificar. No obstant, en aquest cas, els sistemes són força trivials de resoldre:
. Aleshores,
.
Aleshores,
. Aleshores,

105
. Aleshores,
.
D’aquesta manera, la matriu de canvi de bases queda:
. d) Usarem la matriu de canvi de base inversa a l’anterior, és a dir .
. Per veure si A pertany a F, vegem primer què és A en components respecte de la base canònica de matrius de 2x2:
. Ara, ens preguntem si podem trobar a i b tals que aquesta matriu es pugui expressar a partir d’una combinació de la base de F, és a dir:
. Sí, per als valors a = –7 i b = 6, A és combinació lineal de la base de F, per tant, A F.
3.9.2. Exercicis proposats
Problema P.1
Donat el conjunt C2(x) dels polinomis de grau 2 de variable real i coeficients complexos. a) Trobeu una base de l'espai vectorial C2(x) sobre R. b) Trobeu una base de l'espai vectorial C2(x) sobre C.

106
SOLUCIÓ:
a) {1, j, x, jx, x2, jx2}. b) {1, x, x2}.
Problema P.2
Sigui P3(x) l'espai vectorial dels polinomis de grau 3 amb coeficients reals i variable real sobre el cos commutatiu dels reals. Sigui G P3(x), G = {(x2 + x + 2), (x3 + 3x)}. Trobeu una base de P3(x) completant el conjunt G.
SOLUCIÓ:
Una possible solució és {x2 + x + 2, x3 + 3x, 1, x}.
Problema P.3
Siguin B1, B2 i Bc bases de l'espai vectorial de R3.
B1 = {(2, 1, 1), (3, 1, 0), (0, 0, 1)}. B2 = {(1, 0, 0), (1, 1, 0), (1, 1, 1)}. Bc = {(1, 0, 0), (0, 1, 0), (0, 0, 1)}.
a) Trobeu la matriu de canvi de base de B1 a B2. b) Expresseu el vector (1, 2, –1) en components respecte de la base B1. c) Expresseu-lo ara en la base B2 fent servir la matriu de canvi de base.
SOLUCIÓ:
a)
101110
021.
b) (5, –3, –6). c) (–1, 3, –1).

107
RESUM En aquesta sessió s’han presentat com a exemple sis exercicis resolts, on els conceptes aplicats corresponen als tractats en les dues sessions anteriors. També s’han presentat, al final, tres nous exercicis per ser resolts aplicant els mateixos conceptes.

108

109
SESSIÓ 12: Exercicis del capítol 3
FITXA DE LA SESSIÓ Nom: Exercicis del capítol 3 Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Posar en pràctica els conceptes tractats en totes les sessions corresponents al capítol 3.
CONTINGUTS En aquesta sessió es presenten alguns exercicis resolts a tall d’exemple i se’n proposen d’altres per ser resolts per l’alumne. En aquests exercicis s’han d’aplicar la majoria dels conceptes del capítol 3, que han estat tractats a les darreres sessions. Per tant, es presenten aquests exercicis com un resum dels conceptes més importants tractats en aquest capítol.
3.10. Exercicis
3.10.1. Exercicis resolts
Problema R.1
Sigui M2x2 el conjunt de les matrius quadrades de dues files i dues columnes amb coeficients complexes. a) Demostreu que M2x2 és un espai vectorial sobre . b) Trobeu una base i la dimensió de M2x2 sobre . c) Trobeu una base de M2x2 sobre C. d) Sigui F M2x2, F = {A = (aij) M2x2 / a11 + a12 = a22 + a21}. Demostreu que F és un
subespai vectorial de M2x2. Trobeu una base i la dimensió de F, considerant M2x2 espai vectorial sobre .
e) Sigui G = A, B, C on:

110
A = 11 0
j
B =
0 12j j
C =
1 00 1
jj .
Trobeu l'expressió general d'una matriu de G.
SOLUCIÓ:
a) Seguint la definició de subespai vectorial trobem que es compleix la definició, i com que tot subespai vectorial és també un espai vectorial amb les mateixes operacions interna i externa definides: sí complirà que és un espai vectorial:
a bc d
a bc d
a bc d
a bc d
' '' '
' '' '
a a b bc c d d
' '' '
.
b) Una possible base és la base canònica sobre el reals:
a jb a jba jb a jb
11 11 12 12
21 21 22 22
=
=
a bj
a bj
a bj
a bj11
1 00 0 11
00 0 12
0 10 0 12
00 0 21
0 01 0 21
0 00 22
0 00 1 22
0 00
.
) (sobre 8 = dim 22 xM .
Noteu que pel fet de treballar sobre el cos dels reals (els coeficients de la combinació lineal han de ser reals), cal generar de forma independent la part real i la part imaginària de l'espai vectorial, la qual cosa provoca que es dobli la dimensió d'aquest espai. c) Treballem amb coeficients complexes i busquem la base sobre el mateix cos dels
C:
a jb a jb a jb a jb11 11 12 12 21 21 22 22
1 00 0
0 10 0
0 01 0
0 00 1
.
Sí és un espai vectorial.
jjjj
B0
00,
1000
,000
,0100
,00
0,
0010
,000
,0001

111
C) (sobre 4 = dim 22xM . d) Cal demostrar:
FBAFBA
,
,
222112112221
1211
222112112221
1211
bbbbFbbbb
aaaaFaaaa
22222121
12121111
2221
1211
2221
1211
babababa
bbbb
aaaa
BA
.
Cal demostrar si:
)()()()( 2222212112121111 babababa
)()( )()()()()()(
22222121
222122211211121112121111
bababbaabbaababa
.
Per tant, F és un subespai vectorial. e) Posem una matriu resultant com a combinació lineal de A, B i C:
j
jjj
jG
1001
,2
10,
011
GA
bcjcbjcdjdcjbd
jj
bjj
cj
daaaa
A2
110
012
1001
1
2221
1211
.
1000
,0100
,0010
,0001
B

112
Problema R.2
Sigui M22 l’espai vectorial de les matrius de 2 files i 2 columnes de coeficients reals sobre el cos commutatiu dels reals. a) Sigui
F Aa bc d
M a b c d k i a c b d
2 2 / ,
essent k un nombre real, trobeu els valors de k perquè F sigui un subespai
vectorial de M22 .
b) Sigui
G Aa bc d
M a d c b i a b
2 2 2/ ,
trobeu una base i la dimensió de G.
c) Sigui
H Aa bc d
M a b
2 2 0/
un subespai vectorial de M22, completeu el conjunt
U
0 01 1
0 01 1
,
fins a obtenir una base de H.
d) Siguin 2 subespais vectorials de M22 definits per:
V V1 21 00 0
0 00 1
1 00 1
1 00 1
, , .
Trobeu la relació entre els coeficients d’una matriu A V V 1 2 .
Trobeu una base de V V1 2 . Justifiqueu si V V1 2 és un subespai vectorial de M22 en aquest cas concret.

113
SOLUCIÓ:
a) Tot subespai vectorial F d’un espai vectorial E conté l’element neutre de l’espai E. Per tant, si F és un subespai vectorial de M22, F ha de contenir l’element neutre:
000000000
kkF .
Queda demostrat que per a 0k , F no és un subespai vectorial; ara cal demostrar que per a k = 0, F sí és subespai vectorial.
b) Base de G =
11
00,
1012 , i dim(G) = 2.
c) Primer cal calcular una base i la dimensió de H:
0/22 baM
dcba
AH abba 0
1000
0100
0011
dcadcaa
dcba
A .
base de H
1000
,0100
,0011
i dim(H) = 3.
(Són linealment independents ja que cadascuna de les matrius té una component diferent de zero, on la resta sí que són zero). Per completar el conjunt
U
0 01 1
0 01 1
,
fins a obtenir una base de H cal afegir una matriu de H linealment independent al conjunt U. Per exemple, la primera matriu de la base anterior compleix les dues condicions (pertany a H i és linealment independent del conjunt U), per tant,
base de H
00
11,
1100
,11
00.
d) Les matrius generades de V1 i V2 són linealment dependents. Per tant, generen el
mateix subespai, és a dir: 212121 VVVVVV . En aquest cas concret doncs, la unió sí que és un subespai vectorial.

114
1000
,0001
0 2121 VVBasecbVVdcba
A .
Problema R.3
Sigui V l’espai vectorial dels polinomis amb coeficients i variable real de grau 3 , definim un subconjunt de V de la forma següent:
001/1
1xxd
xpdipVxpW .
a) Comproveu si W1 és o no és un subespai vectorial de V. b) Trobeu una base i la dimensió de W1. c) Doneu una base de W1 que contingui el polinomi 2
1 242 xxxe .
SOLUCIÓ:
a) La condició d’un subespai vectorial s’ha de demostrar mitjançant dos elements genèrics p(x) i g(x) de W1 i dues constants escalars arbitràries i reals.
0011
1 xdx
xrdirWxgxpxr .
Comprovem les dues condicions del subespai W1 per a un element genèric r(x) obtingut com a combinació lineal d’altres dos: 1) 000111 gpr . 2)
0001111
xxxx dxxgd
dxxpd
dxxgxpd
dxxrd
.
Per tant, queda demostrat que W1 és un subespai vectorial de V. b) Per trobar una base hem de partir de l’expressió d’un element genèric de W1.
,,,,, 32103
32
2101 aaaaxaxaxaaxpWxp
101 3210 aaaap

115
2032320 3211
2321
1
aaaxaxaadx
xpdx
x
Les equacions [1] i [2] formen un sistema d’equacions lineals compatible indeterminat, la solució del qual pot expressar-se de la següent forma:
320
321
232
aaaaaa
.
Per tant,
323
32
2
23232321
,3221
322
aaxxaxxa
xaxaxaaaaxpWxp
.
És a dir, qualsevol polinomi de W1 és combinació lineal de 2 polinomis, i en ser aquests dos polinomis linealment independents també són una base de W1.
2dim32,21 132
1 WxxxxWBase . NOTA: es pot comprovar que aquests dos polinomis compleixen les dues condicions imposades dins de W1. c) Perquè un conjunt B format per dos polinomis e1(x) i e2(x) de V sigui una base de
W1 s’han de complir dues condicions: 1) B ha de ser un conjunt linealment independent. 2) 121 , Wxexe . Una possible base és prendre e1(x) = 2 – 4x + 2x2 i com a e2(x) qualsevol vector de la base de l’apartat b) que sigui linealment independent amb e1(x). Com que e1(x) és dues vegades el primer vector de la base calculada a l’apartat b), podem escollir com a segon el segon vector de la mateixa base anterior, és a dir, e2(x) = 2 – 3x + x3.
Problema R.4
En 4 , espai vectorial sobre , a) Siguin e1, e2, e3 i e4 vectors linealment independents a 4 . Demostreu, aplicant la
definició d’independència lineal, que els vectors u1 = e1, u2 = e2 + e3, u3 = e2 – e4 i u4 = e4 també són linealment independents.
b) Sigui E = {e1, e2, e3, e4} una base de 4 i v un vector que, expressat en aquesta
base E, té per components E
v (1, 2, 1, 0). Expresseu v en components referides a la base U = {u1, u2, u3, u4} (sense calcular la matriu de canvi de base).

116
c) Comproveu si el conjunt H = {(x, i, z, t) | i = x + z, i t = 0} és un subespai vectorial de 4 , on és un enter qualsevol. Trobeu la dimensió i una base de H per a un valor qualsevol de .
SOLUCIÓ:
a) Perquè e1, e2, e3, e4 siguin linealment independents sabem, per la definició, que han de complir la següent condició:
1e1 + 2e2 + 3e3 + 4e4 =0 04321 .
Ara, doncs, volem veure que també es compleix:
1u1+2u2+3u3+4u4 = 0 04321 . Per la definició dels ui tenim que 1u1+2u2+3u3+4u4 = 0 és equivalent a:
1e1+2(e2+e3)+3(e2-e4)+4e4 = 0. Agrupant els termes adequadament:
1e1 + (2 + 3)e2 + 2e3 + (4 - 3)e4 = 0, i com que sabem que e1, e2, e3, e4 són linealment independents, tenim que es complirà amb tota seguretat el següent sistema d’equacions lineals:
1 = 0 2 + 3 = 0 2 = 0
4 – 3 = 0. I resolent el sistema obtenim, com a única solució:
04321 . Per tant, u1, u2, u3, u4 són linealment independents. b) Sabem que v = (1, 2, 1, 0) en la base de E, per tant podem escriure v com la
combinació lineal:
v = 1e1 + 2e2 + 1e3 + 0e4. [1]
Volem trobar v expressat en la base de U, per tant, volem a, b, c, d tals que:
v = au1 + bu2 + cu3 + du4 (per la definició dels ui) = ae1 + b(e2 + e3) + c(e2 – e4) + de4 (agrupant de forma convenient)
= ae1 + (b + c)e2 + be3 + (d - c)e4. [2]

117
Igualem ara els coeficients de les expressions [1] i [2] de v i obtenim el sistema:
a = 1 b + c = 2
b = 1 d – c = 0.
I resolent, obtenim: a = b = c = d = 1. Per tant, v |U = (1, 1, 1, 1) (en la base U). c) Sigui el conjunt H = {(x, i, z, t) i = x + z i t = 0}. Volem comprovar que és un
subespai vectorial, per tant, que compleix:
(i) u , v H , u + v H
Vegem-ho:
u = (u1, u2, u3, u4) tal que u2 = u1 + u3 i u4 = 0. v = (v1, v2, v3, v4) tal que v2 = v1 + v3 i v4 = 0.
Per tant, podem escriure u i v:
u = (u1, u1 + u3, u3, 0). v = (v1, v1 + v3, v3, 0).
Calculem ara:
u + v = (u1 + v1, u1 + u3 + v1 + v3 , u3 + v3, 0) = = (u1 + v1, (u1 + v1) + u3 + v3, u3 + v3 , 0).
Per veure més clarament que és un element de H substituïm per:
a = u1 + v1. b = u3 + v3.
Obtenim:
u + v = (a, a + b, b, 0) H. Per tant, H és un subespai vectorial de 4. Trobem ara la dimensió i una base de H. Per tal de fer-ho, considerem l’expressió general d’un vector de H.
(a, a + b, b, 0) = a (1, , 0, 0) + b (0, 1, 1, 0).
Tenim que (1, , 0, 0) i (0, 1, 1, 0) generen, però encara cal comprovar que són linealment independents. Ho farem aplicant la definició:

118
1(1, , 0, 0) + 2(0, 1, 1, 0) = 0
(1 , 1 + 2 , 2 , 0) = 0
. I obtenim el sistema:
1 = 0 1 + 2 = 0
2 = 0, que té com a solució única: 1 = 2 = 0. Així, comprovem que són dos vectors linealment independents. Per tant, una base de H és {(1, , 0, 0), (0, 1, 1, 0)}, i la dimensió de H és 2.
3.10.2. Exercicis proposats
Problema P.1
Donat el subconjunt H de R4 definit per:
H = {(x + i, 2x – z, x + i + z, 0) | x, i, z R}.
Comproveu si és o no és un subespai vectorial de R4. En el cas que ho sigui trobeu una base de H i la seva dimensió.
SOLUCIÓ:
H sí és un subespai vectorial de R4 i dim(H) = 3.
Problema P.2
Sigui CzzzzCCCC i /),,( 3213 .
a) Trobeu una base de C3 sobre R. b) Sigui el subconjunt M = {(z1, z2, z3) C3/ z1 + p z2 + q z3 = 0} on p, q C. Determineu si M és un subespai vectorial de l'espai vectorial de C3 sobre R. c) Comproveu si M és un subespai vectorial de l'espai vectorial de C3 sobre el cos C. d) Trobeu una base de M subespai vectorial de l'espai vectorial de C3 sobre el cos C.

119
SOLUCIÓ:
a) {(1, 0, 0), (j, 0, 0), (0, 1, 0), (0, j, 0), (0, 0, 1), (0, 0, j)}. b) Sí és un subespai vectorial. c) Sí és un subespai vectorial.
Problema P.3 Aquest problema s’ha de lliurar
Sigui P2(x) l'espai vectorial dels polinomis de grau 2 amb coeficients reals i variable real sobre el cos commutatiu dels reals. a) Sigui E = {1, x, x2} una base de P2(x). Trobeu una altra base de l'espai E en la qual
figuri el vector {x2+3}. b) Si F P2(x) i F = {p P2(x)/p(0) = 0}, demostreu que F és un subespai vectorial
de P2(x). c) Trobeu les matrius de canvi de base de E a D = {1, 1 + x, 1 + x + x2} i de D a E. d) Trobeu les components del vector p(x) = 2x2 + 3x + 2 en funció de la base D.
RESUM En aquesta sessió s’han presentat diferents exercicis resolts en els quals s’han aplicat conceptes tractats al capítol 3, i també s’han proposat tres nous exercicis per practicar aquests conceptes.

120

121
SESSIÓ 13: Primera visita a l’aplicació ALGTEC
FITXA DE LA SESSIÓ Nom: Primera visita a l’aplicació ALGTEC Tipus: pràctica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les 12 primeres sessions del curs ja hem tractat uns quants conceptes algebraics interessants (sobretot al capítol 3). En aquesta sessió veurem com aquests conceptes poden aplicar-se per resoldre situacions tècniques provinents de problemes reals.
OBJECTIUS L’objectiu d’aquesta sessió és el de mostrar l’alumne que els conceptes algebraics poden aplicar-se per resoldre problemes provinents de l’àmbit tècnic.
CONTINGUTS En aquesta sessió es presenta l’aplicació ALGTEC (ÀLGebra i TECnologia) que recull alguns problemes tècnics reals que són modelats algebraicament i resolts posteriorment aplicant eines algebraiques. Al llarg del curs es presentaran les deu situacions reals que hi ha incloses en ALGTEC. En aquesta sessió es presentaran les cinc primeres.

122
3.11. Primera visita a l’aplicació ALGTEC
3.11.1. Presentació d’ALGTEC ALGTEC és una aplicació que mostra que molts conceptes algebraics poden, si són ben aplicats, resoldre problemes provinents de l’àmbit tècnic. Actualment, l’aplicació ALGTEC presenta deu situacions provinents de l’àmbit tècnic modelades i desenvolupades aplicant algunes de les eines algebraiques presentades a les sessions del curs. Cada aplicació desenvolupada conté dos apartats: 1. Presentació de l’explicació. Es presenta el procés de modelització a través del
qual el problema real es transforma en un problema algebraic que es resol aplicant conceptes estudiats. Posteriorment, s’interpreta la solució obtinguda dins del context tècnic real del qual prové el problema.
2. Mòdul d’experimentació, amb el qual l’alumne pot experimentar i fer proves amb el fi de comprendre millor els conceptes exposats en la presentació del procés de modelització.
ALGTEC es pot visitar en la següent adreça: http://estudi.salle.url.edu/coures/view.php?id=1292
3.11.2. Aplicacions d’ALGTEC que fan servir els conceptes tractats als tres primers capítols del curs
Detecció de moviment
El problema presentat en aquest títol reflecteix com la resta de matrius pot utilitzar-se per detectar si s'ha produït o no moviment en una escena, partint d'imatges consecutives, sempre que la il·luminació de l’esmentada escena sigui uniforme i controlada. L'exposició d'aquesta situació tècnica s'inicia introduint l'alumne al món de la imatge digital. Per facilitar les explicacions es mostren imatges en blanc i negre. Aquestes imatges, després de ser digitalitzades, són emmagatzemades a l'ordinador en una matriu , on m fa referència al nombre de files i n al nombre de columnes. A cada posició (i, j) de la matriu s'emmagatzema un valor numèric que correspon al valor del nivell de gris del píxel que ocupa la mateixa posició a l'espai. Una seqüència d'imatges digitals consistirà, doncs, en una seqüència de K matrius , on
. Dins d’aquest context, per saber si s'ha produït moviment només cal comparar dues imatges consecutives. Una forma senzilla de fer aquesta comparació és realitzar la resta entre les matrius corresponents i comprovar després si el resultat obtingut presenta valors diferents de zero. A la pràctica poden produir-se lleugeres variacions del nivell de gris en píxels de la imatge en els quals no hi ha hagut moviment, a causa de sorolls o d’errors de precisió dels sensors de la càmera que capten la imatge. Per aquest motiu, a l'exposició es proposa suposar que hi ha moviment en aquelles posicions de la matriu en les quals apareguin valors superiors,

123
en valor absolut, a un llindar prefixat. És a dir, si hi ha moviment, on rij fa referència a cadascun dels elements que formen la matriu R. L'exposició corresponent a aquest exemple d'aplicació de conceptes algebraics al món del processat digital d'imatge s’acompanya d’un mòdul d'experimentació, on es poden seleccionar dues imatges corresponents a una seqüència, visualitzar la resta entre les dues i binaritzar la imatge final utilitzant un llindar prèviament fixat.
L’àlgebra al xifrat de missatges
A l'exposició corresponent a aquest exemple d'aplicació es planteja una forma senzilla de codificar un missatge de text per tal d’evitar que alguna persona no autoritzada pugui llegir-lo. Després de realitzar la traducció directa a nombre de cadascun dels caràcters que formen el missatge, seguint la taula ASCII, es proposa separar l’esmentada seqüència de nombres en grups de, per exemple, tres. Així, cadascun dels grups formats pot veure's com un vector . Amb tots els vectors formats es pot generar la matriu M, col·locant els vectors en ordre de manera que constitueixin les columnes de M. Aquesta matriu representa el missatge a encriptar. Prenguem ara una matriu tal que existeixi la seva matriu inversa . Per encriptar el missatge de forma senzilla només cal multiplicar la matriu del missatge M per la matriu C de xifrat. Les columnes de la matriu M' = C·M correspondran al missatge xifrat. Per desxifrar el missatge només s’ha de multiplicar la matriu corresponent al missatge xifrat M' per la inversa C–1, obtenint com a resultat novament la matriu M = C–1 M' original que conté els nombres corresponents als codis ASCII del missatge original.
Al mòdul d'experimentació associat a aquest exemple es poden modificar les matrius de xifrat, desxiframent i el missatge a xifrar, i observar la seqüència de nombres corresponents al missatge sense xifrar, xifrat i desxifrat.
Generació de moviment
En aquest exemple, es proposa generar diferents posicions d'un objecte 3D definit pels punts que el formen, partint d'un nombre petit de posicions fixes d'aquest mateix objecte. La idea principal és observar que l’objecte pot representar-se amb una matriu de 3 files i N columnes, on N correspon al nombre de punts total que defineixen l'objecte, i on cada columna representa les coordenades x, i, z de cadascun dels punts. Així, si les matrius P1, P2, P3 i P4 representen 4 posicions fixes diferents d'un objecte, la combinació lineal
correspondrà a una nova posició de l’objecte que dependrà del valor dels paràmetres i escollits, on . Al mòdul d'experimentació associat a aquesta aplicació es pot seleccionar entre dos elements diferents (una cara i una mà) i modificar els paràmetres λi, que multipliquen cadascuna de les matrius que representen posicions fixes dels cossos. Aquesta
124
modificació es realitza fàcilment desplaçant amb el ratolí els controls que apareixen a la pantalla, i l'aplicació mostra en pantalla la nova posició generada.
Compressió d’informació aplicant canvis de base
La situació plantejada proposa disminuir l'espai necessari per emmagatzemar un fitxer d’àudio que ha estat digitalitzat utilitzant una freqüència de mostreig bastant superior a la necessària. En aquest exemple es planteja reduir la redundància aplicant un canvi de base. Per a això, les mostres que formen el fitxer d’àudio a comprimir són agrupades de 3 en 3 (es fa així per poder visualitzar a l'espai cadascun d'aquests vectors i extreure posteriorment algunes conclusions) i són interpretades com a vectors
expressats en base canònica. Amb el fi d’emmagatzemar menys
components de cada vector es planteja canviar de base tots aquests vectors, i expressar-los en una nova base B formada per 3 nous vectors, ortogonals entre ells, entre els quals aparegui el vector (1, 1, 1), que apunta en la direcció apuntada (de forma aproximada) per la majoria de vectors (a causa del sobremostreig). Així, si cada vector és expressat en la base B, i suposant que el primer vector de la base és el vector (1, 1, 1), obtindrem una nova representació d’aquests vectors en la qual la primera component és molt superior a les altres dues, per la qual cosa, assumint unes pèrdues mínimes, podem emmagatzemar només la primera de les components i aproximar a zero les altres dues. D’aquesta manera, el fitxer comprimit estaria compost per la primera component de cada vector en aquesta nova base, i ocuparia així una tercera part de l’espai que ocupava el fitxer original. Evidentment, per tornar a escoltar el fitxer s’ha de descomprimir prèviament. El procés de descompressió consisteix a prendre cadascuna de les components emmagatzemades, afegir dos zeros per tal de formar un vector de i interpretar-lo com a vector expressat en la base B. Posteriorment es realitza el canvi de base invers, de base B a base canònica de i es col·loquen ordenats novament els vectors obtinguts. Al mòdul d’experimentació associat a aquest exemple es poden escollir els vectors que componen la nova base, i escoltar un fitxer d’àudio abans i després de comprimir-lo.
Compressió d’imatges
En aquesta aplicació es mostra la mateixa idea presentada a l’exemple anterior, però aplicada ara a la compressió d’imatges digitals. Com exemple, es presenta el format de compressió d’imatges JPG, en el qual l’aplicació d’un canvi de base permet reduir considerablement la mida d’un fitxer d’imatge sense que, aparentment, es produeixin pèrdues en la imatge.
RESUM En aquesta sessió s’han presentat els cinc primers exemples desenvolupats a l’aplicació ALGTEC, en els quals s’ha pogut comprovar que els conceptes tractats a les sessions anteriors es poden aplicar en problemes provinents de l’àmbit tècnic.

125
SESSIÓ 14: Aplicació lineal, definició i propietats
FITXA DE LA SESSIÓ Nom: Aplicació lineal, definició i propietats Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Es definirà el concepte d’aplicació lineal i s’explicaran les seves propietats.
CONTINGUTS En aquesta sessió es defineix el concepte d’aplicació lineal i es detallen quines són les seves propietats. Es mostren dos exemples d’aplicacions lineals i es proposen sis exercicis que il·lustren els conceptes explicats.
4. Aplicacions lineals
4.1. Concepte d’aplicació lineal, definició i propietats
4.1.1. Definició d’aplicació lineal
Definició d’aplicació
Una aplicació es defineix com una relació entre conjunts, de forma que a cada element del conjunt origen li correspon un únic element (imatge) del conjunt final.

126
Definició d’aplicació lineal
Siguin E i F dos espais vectorials sobre un mateix cos commutatiu K, i sigui f una aplicació de E en F:
FEf : )(ufu .
Direm que f és una aplicació lineal si i només si:
)()())()()()
ufufbvfufvufa
Evu , i K .
O equivalentment,
)()()( vfufvuf Evu , i K , .
Exemple 1
Donada la següent aplicació f:
2:f yxyxfufyxu ),()(),(
. És f una aplicació lineal?
SOLUCIÓ:
Perquè sigui una aplicació lineal s’ha de complir que:
)()()( vfufvuf .
Si ho comprovem en l’aplicació f,
212121212211 ),()),(),(()( yyxxyyxxfyxyxfvuf
)()()()(),(),()()( 221122112211 yxyxyxyxyxfyxfvfuf
,
podem afirmar que sí, f és una aplicació lineal.

127
Exemple 2
Donada la següent aplicació f:
2:f xyyxfufyxu ),()(),(
. És f una aplicació lineal?
SOLUCIÓ:
Perquè sigui una aplicació lineal s’ha de complir que:
)()()( vfufvuf .
Si ho comprovem en l’aplicació f,
))((),()),(),(()( 212121212211 yyxxyyxxfyxyxfvuf
))()(),(),()()( 221122112211 yxyxyxyxyxfyxfvfuf ,
podem dir que no, f no és una aplicació lineal.
4.1.2. Propietats A continuació es detallen les propietats que compleixen totes les aplicacions lineals: )()()( 22112211 ufufuuf
EuuK 2121 ,, .
Generalitzant aquest resultat:
)()(11
i
m
iii
ii ufuf
EuK ii .
FEf 0)0(
(la imatge de l’element neutre de E és l’element neutre de F).
DEMOSTRACIÓ (també es pot veure directament per aplicació directa de linealitat):
EvvE
00
FE vfvff 0)(0)0()0(
.
)()( vfvf
(la imatge del simètric és el simètric de la imatge).
DEMOSTRACIÓ:
)()()()())(()0(0 vfvfvfvfvvff EF
.
La composició d’aplicacions lineals és també una aplicació lineal.

128
Siguin
FEf : i GFg :
dues aplicacions lineals, aleshores:
)())(())(()(
:
uhufgufgufuGgFfEh
fgh és una aplicació lineal.
Sigui EH un subespai vectorial, aleshores FHf )( és un subespai vectorial
de F.
})(|{)( vufquetalHuFvHf (imatge dels elements de H ).
Sigui FW un subespai vectorial, aleshores EWf )(1 és un subespai vectorial
de E (sempre que W estigui inclòs en la imatge de F, concepte que es definirà més endavant).
WufEuWf )( que tal)(1
(antiimatge dels elements de W).
4.1.3. Exercicis proposats
Problema P.1
Demostreu si f és una aplicació lineal:
23: f zyxufzyxu ,)(,,
.

129
Problema P.2
Demostreu si f és una aplicació lineal:
22: f 2,)(, xyxufyxu
.
Problema P.3
Demostreu si f és una aplicació lineal:
22: xMf no és aplicació lineal.
)(det bcadAdcba
A
.
Problema P.4
Demostreu si f és una aplicació lineal:
222: xMf
)2,( baddcba
.
Problema P.5
Demostreu si f és una aplicació lineal:
xPxPf 23:
dxxdpxp )()(
232 32 dxcxbdxcxbxa .
Problema P.6
Demostreu si f és una aplicació lineal:
2222: xx MMf
dbca
dbcadcba
22.

130
RESUM En aquesta sessió s’ha definit el concepte d’aplicació lineal i s’han estudiat quines són les seves propietats. S’han presentat alguns exemples i s’han proposat uns exercicis per posar en pràctica els conceptes estudiats.

131
SESSIÓ 15: Més definicions associades a aplicacions lineals
FITXA DE LA SESSIÓ Nom: Més definicions associades a aplicacions lineals Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior es va definir el concepte d’aplicació lineal i es van determinar quines són les propietats que compleix.
OBJECTIUS En aquesta sessió es veuran les definicions d’altres conceptes associats a les aplicacions lineals.
CONTINGUTS Al llarg d’aquesta sessió es definiran els conceptes de nucli i d’imatge d’una aplicació lineal, i es presentaran alguns exemples per il·lustrar-los. Al final de la sessió es veurà un seguit de proposicions relacionades amb els conceptes estudiats fins al moment i es proposarà un exercici a lliurar.
4.2. Subespai nucli d’una aplicació lineal
4.2.1. Definició
El nucli d’una aplicació lineal f )(Kerf és el subespai vectorial de E format per tots els vectors de E que tenen per imatge l’element neutre de F.
FufEuKerf 0)(/ .

132
Demostració
Si EKerf és subespai vectorial ha de complir:
KerfyxK
Kerfyx
,
,
Kerfyxyfxfyxf
000)()()( .
4.2.2. Exemples
Exemple 1
Sigui 23: f una aplicació lineal:
zyxzxzyxu ,,,.
Trobeu una base i la dimensió de Kerf .
SOLUCIÓ:
)0,0(),,(/,, 3 zyxfzyxKerf
xzy
zyxzx
0
00
zxyzyxKerf ;0/,, 3 .
La forma dels vectors de Kerf és )1,0,1()1,0,1(,0, Kerfzzz .
Base de 1,0,1Kerf i 1dim Kerf .
Exemple 2
Sigui 222: xMf una aplicació lineal:
),2( cbbadcba
.
Trobeu una base i la dimensió de Kerf .

133
SOLUCIÓ:
d
ccacbcb
ba
c2c- :nucli del vectorsdels Forma
2 i
002
.
Base de Kerf
1000
,0221
i 2dim Kerf .
4.3. Subespai imatge d’una aplicació lineal
4.3.1. Definició
La imatge d’una aplicació lineal f ( fIm ) és el subespai vectorial de F format per les imatges de tots els vectors de E:
vufEuFvf ,/Im .
4.3.2. Exemples
Exemple 1
Demostreu que fIm és un subespai vectorial de F.
SOLUCIÓ:
Exx
fxxffxfxfsicomproCalfxfxftConsideran
21
2121
21
que ja pertany, que Sí
?Im)( :linealitatper Im)()(varIm)(),(
.
Exemple 2
Trobeu una base i la dimensió de fIm .
xyyxyxxfyxxf
,,,: 32
.

134
SOLUCIÓ:
)1,1,1(),1,1,1(Im)1,1,1()1,1,1(,,,, fyxyyyxxxxf .
Els vectors són linealment independents i generats, per tant, formen una base de
fIm . Així doncs:
base de fIm 1,1,1,1,1,1 i dim de fIm 2.
La forma dels vectors de la imatge de f és:
0,1,-1) (1,0,0), :possible base altra Una),,( 01111
11bbabc
cba
.
Exemple 3
Trobeu una base i la dimensió de fIm .
),,(
: 322
cabcbadcba
Mf x
.
SOLUCIÓ:
)1,1,0(),0,1,1(),1,0,1(Im)1,1,0()0,1,1()1,0,1(),,0(0,,,0,
fcbaccbbaaAf
.
Dels tres vectors que generen Im f només hi ha dos linealment independents.
Base de fIm 0,1,1,1,0,1 i dim de fIm 2.
Per saber la forma que tindran els vectors de la imatge procedirem com al primer parcial: hem de forçar que el sistema que s’obté a partir de la igualtat
),,()0,1,1()1,0,1( cba sigui compatible. És a dir,
),,(0011011
bababacabccba
.
Una altra base possible: {(1, 0, 1), (0, 1, 1)}.

135
4.4. Altres proposicions i definicions
4.4.1. Proposició 1
Sigui FEf : una aplicació lineal i E un espai vectorial de dimensió finita, aleshores:
fKerfE Imdimdimdim .
Demostració
Suposem el conjunt ruuuU ,..., 21 com a base de Kerf .
nrrKerf
nE
dimdim
ja que EKerf subespai vectorial.
Completem la base de Kerf fins a obtenir una base de E. Podem trobar n r vectors de E tals que afegits als r vectors de U formin un conjunt de n vectors linealment independents, obtenint així una base de E.
nrrr vvvuuuV ...,,,..., 2121 base de E.
Busquem ara una base del subespai fIm (per a complir la fórmula haurà de tenir n r vectors).
yxfquetalExfy )(Im
n
riiii
r
ii vuxEx
11
ja que nrrr vvvuuuV ...,,,..., 2121 base de
E;
n
riii
n
riiii
r
ii
n
riiii
r
ii vfvfufvufxfy
11111
)(0)()()()( ,
ja que 0)( ii ufKerfu
,
)(),......,(),(Im)(......)()(Im
212211 nrrnnrrrr vfvfvffvfvfvfyfy
.
Provem ara que aquest sistema de generats és un conjunt linealment independent de vectors:
?0.....0...... 212211 nrrnnrrrr vfvfvf (solució
única?).

136
Per linealitat tenim:
Kerfvvvvvvf nnrrrrnnrrrr
......0)......( 22112211 0.....21 nrr és l’única solució, ja que Kerfvvv nrr
,....,, 21 . Són generats i linealment independents, i per tant són base.
Base de )}(),......,(),({Im 21 nrr vfvfvff
KerfErnf dimdimImdim .
4.4.2. Proposició 2
Una aplicació lineal FEf : queda determinada per les imatges d’una base de E.
Demostració
Sigui neee ,..., 21 base de E.
n
iiiexEx
1
i
són les components del vector .e vectorsde base laen i
x
n
iii
n
iii efefxf
11
aplicant definició d’aplicació lineal. xf
queda determinat per les imatges de la base )(),...(),( 21 nefefef .
4.4.3. Monomorfismes, epimorfismes i isomorfismes
Sigui FEf : una aplicació lineal.
f és injectiva o monomorfisme si
2121 )()( xxxfxf (vectors diferents tenen imatges diferents).
f és exhaustiva o epimorfisme si
yxfExFy )( (tot vector de F té antiimatge).

137
f és bijectiva o isomorfisme si f és injectiva i exhaustiva.
4.4.4. Proposició 3
Sigui FEf : una aplicació lineal, aleshores:
f injectiva fEKerfKerf Im dimdim0dim0
. f exhaustiva FfFf dimImdimIm .
Observació
Si FEf : és una aplicació lineal bijectiva, aleshores FE dimdim .
f bijectiva Im perquè dimImdim
0dim
FfFfexhaustivaf
Kerfinjectivaf
.
FfKerfE dim0Imdimdimdim .
4.4.5. Rang de la matriu associada a una aplicació lineal
Sigui FEf : una aplicació lineal. Rang(A) = dim Imf, on A és la matriu associada a l’aplicació f. NOTA: es veurà en detall la definició de la matriu associada a una aplicació lineal a l’apartat 4.5 (sessió 16).
4.4.6. Aplicació inversa
Sigui FEf : una aplicació lineal bijectiva, aleshores definim l’aplicació inversa de f com:
EFf :1
uvfv )(1
tal que vuf )( .
NOTA: 1f també és una aplicació lineal bijectiva.

138
4.4.7. Exercici Aquest exercici s’ha de lliurar
Sigui 222: xMxPf una aplicació:
cbcba
cacbacxbxaxp
232)( 2 .
a) Demostreu que f és una aplicació lineal. b) Trobeu una base i especifiqueu quina és la dimensió de Kerf . c) Trobeu una base i especifiqueu quina és la dimensió de fIm . d) Raoneu si l’aplicació f és injectiva, exhaustiva o bijectiva.
RESUM En aquesta sessió s’han estudiat els conceptes de nucli i d’imatge d’una aplicació lineal. També s’han enunciat un conjunt de proposicions relacionades amb els conceptes estudiats i s’ha proposat un exercici que permet posar en pràctica els coneixements assolits a la sessió.

139
SESSIÓ 16: Matriu associada a una aplicació lineal
FITXA DE LA SESSIÓ Nom: Matriu associada a una aplicació lineal Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les dues sessions anteriors s’han estudiat els conceptes d’aplicació lineal, de subespai nucli i de subespai imatge, a més d’altres definicions i propietats associades.
OBJECTIUS En aquesta sessió s’estudiarà el concepte de matriu associada a una aplicació lineal.
CONTINGUTS Al llarg d’aquesta sessió s’estudiarà el concepte de matriu associada a una aplicació lineal i s’aprendrà com es pot deduir a partir de la definició de l’aplicació. També es veurà quina és la matriu associada a l’aplicació inversa d’una aplicació lineal que sigui bijectiva.
4.5. Matriu associada a una aplicació lineal La matriu associada a una aplicació lineal és una matriu que permet trobar la sortida de l’aplicació quan s’introdueix un vector determinat. Per a això cal considerar dues bases, la d’entrada i la de sortida. A continuació es detalla com deduir aquesta matriu associada.
4.5.1. Deducció
Sigui :f FE una aplicació lineal amb E i F espais vectorials de dimensió finita.
},.....,,,{ 3211 neeeeB base de E dimE = n).
},.....,,,{ 3212 mvvvvB base de F (dimF = m).

140
L’aplicació lineal queda determinada per les imatges d’una base de E:
i
n
iiexEx
1
nBx .....211
)()()(11
i
n
iii
n
ii efefxf
.
Volem trobar les components de Fxf )( respecte de la base 2B ,
mBxf .....)( 212
. Expressem Fef i )( com a combinació lineal de la base },.....,,,{ 3212 mvvvvB
de F
m
jjjii
mmnnnn
mm
mm
vaef
vavavaef
vavavaefvavavaef
1
2211
22221122
12211111
)(
..)(.
..)(..)(
.
m
jjj
m
jj
n
ijii
n
i
m
jjjii
n
i
m
jjjiii
n
iii
n
ii vvavavaefefxf
11 11 11 111)()()(
.
Per tant,
ji
n
iij a
1
mj ..1 .
Podem expressar matricialment aquest resultat:
mn
mnmmm
n
n
aaaa
aaaaaaaa
2
1
3
2
1
321
2232221
1131211
.
De la matriu de coeficients aij, que definirem com a F12, en direm matriu associada a f en bases B1 de sortida i B2 d’arribada.

141
mnmmm
n
n
aaaa
aaaaaaaa
F
321
2232221
1131211
12 .
De forma que:
m
B
n
B xfx
2
1
3
2
1
21)(
12 12)( BB xFxf .
Observacions
1) mxnMF 12 on nE dim i mF dim ,
2222
)()()()( 32112 BnBBB efefefefF
.
2) fImdim rang( 12F ).
Rang( 12F ) = nombre de vectors columna de 12F que són linealment independents. dim Imf = nombre de vectors linealment independents del conjunt
)}(),...,(),({ 21 nefefef ja que )(),(),(),(Im 321 nefefefeff .
4.5.2. Matriu associada a l’aplicació inversa d’una aplicació lineal bijectiva
Sigui FEf : una aplicació lineal bijectiva. Aleshores definim l’aplicació inversa de f com:
EFf :1
uvfv )(1 tal que vuf
)( .
NOTA: 1f també és una aplicació lineal bijectiva. Siguin 1B base de E i 2B base de F.
12F matriu associada a l’aplicació f en bases 1B de sortida i 2B d’arribada, aleshores:

142
nxnMF 12 és una matriu quadrada, ja que nFE dimdim .
0det 12 F ja que nFfrangF dimImdim12 .
nxnMF 12 i 11212 0det FF .
Vegem ara que 1
12F és la matriu associada a l’aplicació f-1 en bases 2B de sortida i 1B
d’arribada.
12F és la matriu associada a l’aplicació f en bases 1B de sortida i 2B d’arribada, per tant, multiplicant les dos parts de la igualtat per:
112F
12 12)( BB xFxf
12 121
121
12 )( BB xFFxfF
12)(1
12 BB xIdxfF .
12)(1
12 BB xxfF sigui yxf
)( és a dir )(1 yfx .
21
112
1 )( BB yFxf .
4.5.3. Exemples
Exemple 1
Donada la següent aplicació lineal f:
:f 4 3 4342414321 ,,,,, xxxxxxxxxx .
Trobeu la matriu associada a f en base canònica.
SOLUCIÓ:
Busquem les imatges de la base canònica: 1,1,11,0,0,0
1,0,00,01,00,1,00,0,1,00,0,10,0,0,1
ffff
,
la matriu associada serà
110010101001
CCF .
fImdim frangFCC 3dim3 és exhaustiva.
1dimdimImdimdim 4 KerfKerff .

143
Exemple 2
Donada l’aplicació lineal f:
)()(: 21 xPxPf ))()2()( 2axxbabaufbxau
,
i les bases B1 i B2:
}1 ,1{1 xB base de ).(1 xP }xx1 x,1 ,1{ 2
2 B base de ).(2 xP
Trobeu la matriu associada a f en els casos següents: a) En base canònica. b) En base B1 de )(1 xP i canònica de ).(2 xP c) En base canònica de )(1 xP i B2 de ).(2 xP d) En base de B1 de )(1 xP i B2 de ).(2 xP e) Estudieu si f és injectiva, exhaustiva o bijectiva. f) Trobeu una base del nucli i de la imatge de l’aplicació.
SOLUCIÓ:
a)
011112
CCF .
b)
112112
1011
011112
··)( :forma Altra 112112
1111 CBCBcccC FxCFxfF
.
c)
011021
011112
100110
0111
222 CCCCCCC FCFCF .
d)
111011
1011
011112
100110
011
1212 CCCC CFCF .

144
e) frangFrangFrangFf CCCC 3dim2Imdim 321 no és
exhaustiva. ffKerf 022Imdimdimdim 2
és injectiva. f és injectiva, però no exhaustiva, per tant no és bijectiva.
Exemple 3
Donada l’aplicació lineal FEf : que en bases },,{ 3211 uuuB de sortida i
},,{ 3212 vvvB d’arribada té per matriu associada:
313202
211
12A .
Es demana:
a) Imatge dels vectors 3213212211 25,32,23 uuuxuuxuux
. b) Dimensió de Kerf i de fIm . c) Base de Kerf i de fIm .
SOLUCIÓ:
a) 12 1121 BB xAxf
1165
023
313202
211
3211 1165)(1165023 vvvxfvfi
3212 34)(341032 vvvxfvfi
3213 1062)(10 6 2215 vvvxfvfi
.
b) 3Imdim 12 rangAf . 033Imdimdimdim fEKerf .
c) 222
)3,2,2(,)1,0,1(,)3,2,1()(),(),(Im 321 BBBufufuff 3Imdim f els
tres vectors són linealment independents.
Base de fIm

145
}322,,32{})3,2,2(,)1,0,1(,)3,2,1{( 32131321222vvvvvvvvBBB
)}0,0,0{(}0{0dim
KerfKerf .
Exemple 4
Donada la següent aplicació:
2
222:
xbcbxdadcba
xPfM
.
I les bases B1 i B2:
1000
0101
0110
0021
1B
2
2 31 xxB .
a) Trobeu la matriu associada a f en bases B1 de sortida i B2 d’arribada. b) Trobeu una base i la dimensió de Kerf i de fIm de dues formes diferents:
sense utilitzar la matriu calculada a l’apartat a), i utilitzant la matriu calculada en a).
SOLUCIÓ: a)
2
2
2
2
00111000
10210101
0100110
2272210021
2
2
B
B
B
B
f
xf
xf
xxf
010200121207
12F .
b)
134Imdimdimdim3Imdim
22
12
fMKerfrangFf
x .

146
}0)({ 222
xbcbxdaAfM
dcba
AKerf x .
1001
00
00
00
0a
aa
dcba
cb
ad
bcb
da.
base del
1001
Kerf i 1dim Kerf .
Altra forma d’arribar al resultat:
aa
dcba
F B 3003
2a,3a)(a,-2a, obtenimOperant ......
0000
·1
12 .
Els elements de fIm són de la forma:
)1()()1( 222 dcxxxbaxbcbxda .
2222 ,,11,,,1Im xxxxxxf .
base de },,1{Im 22 xxxf i 3Imdim f . Una altra forma: sabem que els vectors (columna) que formen la matriu 12F estan expressats en components respecte de la base B2 i pertanyen a la imatge de l’aplicació (són vectors generats d’aquesta). Per tant, si agafem d’entre aquests vectors el màxim nombre de vectors linealment independents obtindrem una base de la imatge.
base = 1,1,)0,0,1(,)1,0,2(,)0,1,0( 2
222 xxBBB
.
RESUM En aquesta sessió s’ha estudiat el concepte de matriu associada a una aplicació lineal veient com es pot deduir a partir de la definició de l’aplicació. També s’ha estudiat quina és la matriu associada a l’aplicació inversa d’una aplicació lineal bijectiva.

147
SESSIÓ 17: Composició d’aplicacions lineals
FITXA DE LA SESSIÓ Nom: Composició d’aplicacions lineals Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les tres sessions anteriors s’ha estudiat què són les aplicacions lineals i diferents conceptes associats a elles.
OBJECTIUS Definir la composició d’aplicacions lineals.
CONTINGUTS En aquesta sessió es definirà la composició d’aplicacions lineals i la matriu associada a aquesta composició. Es mostrarà un exemple que posa en pràctica els conceptes estudiats.
4.6. Composició d’aplicacions lineals
4.6.1. Definició
Siguin FEf : i GFg : dues aplicacions lineals, aleshores, si definim h com:
)())(())(()(
:
uhufgufgufuGgFfEh
,
podem dir de h:
fgh . És una aplicació lineal.

148
4.6.2. Matriu associada a la composició d’aplicacions lineals
Siguin 1B base de E, 2B base de F i 3B base de G, i considerant que: 12F matriu associada a l’aplicació f en bases 1B de sortida i 2B d’arribada, 23G matriu associada a l’aplicació g en bases 2B de sortida i 3B d’arribada,
2312
321
:
GFBBBGgFfEh
.
Aleshores, la matriu associada a l’aplicació fgh en bases 1B de sortida i 3B d’arribada és:
122313 FGH .
Demostració
Considerant:
12 12)( BB xFxf Ex
.
23 23)( BB yGyg Gy
.
Aleshores:
1223131223))(())(()( FGHxFGxfgxfgxh
.

149
4.6.3. Exercici d’exemple
Donades les aplicacions lineals 33: f i 23: g de les quals coneixem:
233 gf 101 011 02 011 101 30 .
I sabent que:
Kerf120 . Kerg011 .
Trobeu: a) Matrius associades a f i g en base canònica. b) Matriu associada a f en bases 1200111011 B de
sortida i 0111010112 B d’arribada. c) Matriu de canvi de base de la base canònica de 3 a 1B . d) Matriu de canvi de base de la base canònica de 3 a 2B . e) Matriu associada a l’aplicació fgh en base canònica. f) Matriu associada a h en bases canònica de sortida i }30,02{3 B
d’arribada. g) Dimensions i base del nucli i de la imatge de f . h) Dimensions i base del nucli i de la imatge de g .
SOLUCIÓ:
a) Mètode 1
Coneixem:
000120
101011011101
fff
.
Considerem la base de 3 120,011,1011 B , i la base canònica de 3 100,010,001
3CB .
Trobem primer la matriu associada a f en bases 1B de sortida i 3CB d’arribada:

150
010001011
31CF .
Calculem la matriu de canvi de base de la base canònica de 3 a 1B :
111212211
101210011
)(
1
111 33CC
CC
212211
423
111212211
010001011
11 33 CCCC CFF .
Mètode 2
Coneixem:
000120
101011011101
fff
.
Els vectors de 3 és poden expressar de la següent forma:
1000102120
010001011100001101
.
Per les propietats d’aplicació lineal:
010001011
010001101fff
fff
1000102120 fff .
Resolent:
224100
112010213001
fff
.
I la matriu associada en base canònica:

151
212211
423
CCF .
Anàlogament per a g :
300111
CCG .
b) Mètode 1
12
2331 231
333
F
CCF
basedecanvi
f
BBBCC
000010001
010001011
111200111
21
3333 11
21212 CCCC FCFCF .
Mètode 2
000120
010011
001101011101011011101
2
2
2321
B
B
B
f
f
ff
000010001
12F .
c)
111212211
101210011
)(
1
111 CC CC .
d)
111200111
21
010101111
)(
1
122 CC CC .

152
e)
CC
CCCC
H
CGCFC
gf
BBB
233
636422
212211
423
300111
CCCCCC FGH .
f)
3
3 3
223
C
CCC
H
CCHC
basedecanvi
h
BBB
212211
636422
2003
61
636422
3002 1
1333 CCCCCCC HCHCH
.
g)
212211
423
CCF
2Imdim CCrangFf
123Imdimdimdim 3 fKerf
CCC BBBf 224,112,213Im
224,112,213Im f . Com que 2Imdim f , d’aquests tres vectors només hi ha 2 linealment independents.
Base de 112,213Im f
1202020
000
212211
423zzzzyx
zyx
zyx
.
Base de 120120
BBKerf .

153
h)
300111
CCG
2Imdim CCrangGg
123Imdimdimdim 3 gKer
CCC BBBg 31,01,01Im
31,01,01Im g . Com que 2Imdim g , d’aquests tres vectors només hi ha 2 linealment independents.
Base de 31,01Im g
01100
00
300111
xxxzyxxy
z
zyx
Base de 011011 CKerg .
RESUM En aquesta sessió s’ha estudiat què és la composició d’aplicacions lineals i quina és la matriu associada a aquest concepte. Al final de la sessió s’ha detallat la solució d’un exercici d’exemple que mostra els diferents conceptes estudiats durant les darreres sessions.

154

155
SESSIÓ 18: Exercicis resolts corresponents al capítol 4
FITXA DE LA SESSIÓ Nom: Exercicis resolts corresponents al capítol 4 Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS Al capítol 4 s’ha estudiat què és una aplicació lineal i els conceptes relacionats.
OBJECTIUS Posar en pràctica els conceptes estudiats al capítol 4.
CONTINGUTS Aquesta sessió consta d’un conjunt d’exercicis resolts per posar en pràctica els conceptes estudiats al capítol 4.
4.7. Exercicis
4.7.1. Exercicis resolts
Problema R.1
Sigui l’aplicació lineal ƒ: ℝ² → ℝ³ que verifica que ƒ(1, –1) = (–1, –2, –5) i que ƒ(2, –3) = (0, 5, 4). Determineu la matriu associada a ƒ en base canònica.

156
SOLUCIÓ:
Considerem la base B = {(1, –1), (2, –3)}, ja que la dimensió de l’espai de sortida és 2 = 2, i aquests dos vectors són linealment independents. Si mirem l’enunciat,
directament tenim que la matriu associada a ƒ en les bases B de sortida i canònica d’arribada és:
455201
A .
Volem obtenir, a partir d’aquesta, la matriu associada en canònica de sortida i d’arribada. Considerem la composició d’aplicacions següent:
CBC AC
fdebasecanvi
CB
322
.
Sabem que la matriu associada a la composició d’aplicacions g = ƒ o (canvi de base) és:
CBCC ACF , on A és la matriu associada a ƒ amb bases de sortida B i d’arribada C (canònica) i CCB la matriu de canvi de base de C a B. Podem trobar CCB de dues formes: directament o calculant CBC
-1. Fer-ho directament vol dir trobar les components dels vectors de la base canònica referides a la base B i posar-les com a columnes de CCB, és a dir:
(1, 0) = α1(1, –1) + β1(2, –3) i resolent tenim 1,30,1 B
(0, 1) = α2(1, –1) + β2(2, –3) i resolent tenim 1,21,0 B . Per tant, la matriu de canvi de base és:
11
23CBC .
Finalment, tenim que la matriu que buscàvem és:
141991123
1123
455201
CBCC ACF .

157
Problema R.2 Sigui E un espai vectorial de dimensió 3 sobre ℝ. Sigui 321 ,, eeeB
una base de E. Considerem l’aplicació lineal ƒ: E → E, que té per matriu associada en la base B (tant de sortida com d’arribada):
110431612
A .
Trobeu la matriu associada a ƒ en la base 321 ,, uuuU tal que:
33212211 2,, eueeueeu .
SOLUCIÓ:
Considerem la composició d’aplicacions lineals següents:
UCBABCUEEEE
BUUB
basecanvi
fbasecanvi
.
Per tant, seguint el diagrama anterior, la matriu associada a la base U tant de sortida com d’arribada la trobem de la forma:
UBUBUBBUUU ACCACCF 1 .
Calculem la matriu de canvi de base de U a B escrivint els vectors de U en la base B. A partir de l’enunciat tenim:
)2,0,0(200
)0,1,1(011
)0,1,1(011
33213
23212
13211
B
B
B
ueeeu
ueeeu
ueeeu
200011011
UBC .
Calculem la inversa d’aquesta matriu:
100011011
211
UBC .

158
Calculem ara la matriu FUU:
222251
1035
21
200011011
110431612
100011011
211
UBUBUU ACCF .
Problema R.3
Sigui ƒ: ℝ³ → ℝ² una aplicació lineal que en les bases 321 ,, eee de ℝ³ i 21 ,uu
de ℝ² té per matriu associada:
31
21
32
A .
Es pren en ℝ 3 la base 321 ,, vvv
definida com:
213132321 ,, eeveeveev .
a) Trobeu la matriu associada a ƒ si es conserva la base 21 ,uu
en ℝ2.
Es pren en ℝ2 la base 21 , ww tal que:
2,
221
221
1uu
wuu
w
.
b) Trobeu la matriu associada a ƒ si es conserva la base 321 ,, eee en ℝ3.
c) Quina és la matriu de ƒ en les bases V = 321 ,, vvv de ℝ3 i W = 21 , ww
de
ℝ2?
SOLUCIÓ:
a) Considerem la següent composició d’aplicacions lineals:
iiVEi
fbasecanvi
uAeCv
233 .
Per tant, la matriu associada a les bases V de sortida i U d’arribada la trobem de la forma

159
VEVU ACF .
Calculem, doncs, la matriu de canvi de base CVE. Per fer-ho, hem de trobar les components dels vectors de la base V respecte de la base E, les quals ens les dóna la pròpia definició dels vectors V = 321 ,, vvv
. Així:
011101110
VEC .
Per tant, ja sols ens queda calcular:
51
03
10
011101110
31
21
32
VEVU ACF .
b) Considerem la següent composició d’aplicacions lineals:
iUWii
basecanvi
f
wCuAe
223
.
Per tant, la matriu associada a les bases E de sortida i W d’arribada la trobem de la forma:
ACF UWEW .
Calculem, doncs, la matriu de canvi de base CUW. Per fer-ho, hem de trobar les components dels vectors de la base U respecte de la base W, les quals ens les dóna l’enunciat:
212211 , wwuwwu .
Per tant,
11
11UWC .
Finalment, ja només ens queda calcular:
42
31
15
31
21
32
1111
ACF UWUW .

160
c) Usarem els apartats anteriors per tal de trobar la matriu en les bases que se’ns demana. Considerem per a això la següent composició d’aplicacions lineals:
iUWiVUi
basecanvi
f
wCuFv
223
.
Així, la matriu que busquem la dóna:
4
633
11
51
03
10
1111
VUUWVW FCF .
Problema R.4
Tenim les següents aplicacions f i g sobre els següents espais vectorials:
)(21222 xPMM gx
fx .
Coneixem:
dcba
Afdcba
A
MM xf
x
)(
1222
,
i la matriu associada a g següent:
101111
21BBG .
Definim les següents bases:
1000
,0100
,0010
,0001
1C base de M2x2.
01
,10
1B base de M2x1, 21,,12 xxB base de P2(x) i
2,,12 xxC base de P2(x). a) Comproveu que l’aplicació f és lineal.

161
b) Doneu una base de ker i una altra de la imatge d’aquesta aplicació f (no doneu els elements de les bases expressats en components).
c) Trobeu FC1B1. d) Trobeu la matriu associada a l'aplicació h = g o f amb base de sortida C1 i base
d’arribada C2, és a dir HC1C2.
SOLUCIÓ:
a) Si és lineal ha de complir:
)()()(,
, 22 vfufvufR
Mvu x
.
Suposem:
''''
dcba
vdcba
u ,
i calculem:
)()(''''
''''
''''
)(
vfufdcba
dcba
ddccbbaa
ddccbbaa
fvuf
.
Per tant, és una aplicació lineal. b) kerf està format per tots aquells vectors de l’espai origen (matrius de M2x2) que
tenen per imatge l’element neutre de l’espai destí (matrius de M2x1), és a dir:
00
0)( uffKeru .
Vegem la forma d’aquests vectors del nucli imposant aquesta condició:
dcba
dcba
dcba
fuf
00
)(
.
Per tant, la forma genèrica de les matrius que pertanyen al nucli és:
1100
0011
caccaa
.

162
Aleshores, una possible base del nucli és:
base de kerf =
1100
,0011
.
El subespai Imf està format per tots aquells vectors de l’espai destí (matrius M2x1) que són imatge de vectors de l’espai origen (matrius M2x2), és a dir:
uxfMxfu x
)(Im 22 .
La forma dels vectors de Imf ens la dóna l’enunciat:
1
010
01
01
)( dcbadcba
xf .
Per tant, un sistema generat de les imatges seria:
10
,10
,01
,01
Im f .
Però aquí hi ha matrius que són linealment dependents de les altres. Si ens quedem amb les linealment independents (p. ex. la primera i la tercera, que formen la base canònica de M2x1), tindrem una base de Imf:
base de
10
,01
Im f .
c) Sabem que la matriu associada a una aplicació es construeix de la següent manera:
11000
10100
10010
10001
11 Bf
Bf
Bf
BfF BC .
Per tant:
00111100
110
110
101
101
11 BBBBF BC
.
d) Sabem:

163
2211
21
2111
)(21222
CBBC
PMM
CHC
BGBBFC
xg
xf
x
.
Per tant,
11212221 BCBBCBCC FGCH .
On:
100010101
21
221 2
22 Cx
Cx
CC CB .
Aleshores:
00111111
1122
11212221 BCBBCBCC FGCH .
Problema R.5
Sigui 321 ,, eeeB la base canònica de 3 i 33: f una aplicació lineal
definida per:
313
32131
32121
)(2)()()1()()(
eeefeeaeefef
eeaeaefef
.
a) Trobeu la matriu associada a f considerant la base B en l’espai de sortida i en el d’arribada.
b) Trobeu dim kerf i dim Imf en funció del paràmetre a. c) Per a quins valors del paràmetre a, f és bijectiva? d) Per a a = 2, sigui 321 ,, uuuD
base de 3 . Tenim que:
323
32
211
2 eeueu
eeu
.
Trobeu la matriu associada a f considerant la base D en l’espai de sortida i la base B en el d’arribada.

164
SOLUCIÓ:
a) Per tal de trobar la matriu associada a f, considerant la base B en l'espai de sortida i en el d'arribada, cal trobar les imatges dels vectors de B i expressar-les en components respecte de la base B. Per l'enunciat tenim, directament: 313 )( eeef
. Substituint aquesta en la segona equació obtenim:
32321311 2)( eeaeeaeeeef .
I restant la primera menys la segona equació substituint 313 )( eeef
, obtenim:
2132132 )1()()( eeaeeeaefef .
Trobem ara les components de les imatges en la base B:
)1,,0()()( 1321 aefeeaefB
)0,1,()()( 2212 aefeeaefB
)1,0,1()()( 3313 B
efeeef .
Així, la matriu que es demana és:
1010110
aa
FBB .
b) Sabem que BBFrangffKer 33 dimImdimdimdim (1). Calculem primer, doncs,
1010110
Imdim aa
rangFrangf BB .
Estudiem el rang en funció del paràmetre a, com que 11010110
2
aaa
tenim que:
Si 2112 BBrangFaa , ja que 011001
.
Si 3112 BBrangFaa .

165
Ara, usant (1) tenim: Si 1dim2Imdim1 fKerfa . Si 0dim3Imdim1 fKerfa . c) Si 3dim3Imdim1 fa , per tant f és exhaustiva.
0dim fKer , per tant f és injectiva.
d) Estudiem ara el cas . Per calcular la matriu associada a f, considerant la base D de sortida i la base B d'arribada, usarem la composició d'aplicacions lineals. Considerem:
333: fbase
canvi
f .
Així tenim que DBBBDB CFF on BBF és la matriu associada a f amb base B de sortida i d’arribada i DBC és la matriu de canvi de base de D a B. Per trobar DBC expressem els vectors de D en components respecte de la base B usant l'enunciat:
)0,1,1(1211 B
ueeu
)1,0,0(232 B
ueu
)1,2,0(2 3323 B
ueeu .
Aleshores:
110201001
DBC .
Per tant,
111201312
110201001
101012120
DBBBDB CFF .

166
Problema R.6
Donades les següents aplicacions lineals f i g:
2222 RxPM gf
x .
Coneixem:
210001
xf
, cbacxbxag ,2 .
10010
f ,
1011
,0101
,0010
,0001
1B base de 22xM .
210101
xxf
, 22
2 1,1,1 xxxB base de xP2 .
fKer
1011
, 1,1,0,13 B base de 2R .
a) Trobeu CCF (matriu associada a f en base canònica). b) Trobeu 12F (matriu associada a f en bases 1B de sortida i 2B d’arribada). c) Trobeu la base i la dimensió de fKer (els vectors de la base no han d’estar
expressats en components). d) Trobeu la matriu associada a xfg en base 1B i 3B . e) Raoneu si f és injectiva, exhaustiva o bijectiva.
SOLUCIÓ:
a) Per trobar CCF , necessitem calcular:
0001
f ,
0010
f ,
0100
f ,
1000
f .
Llavors:
210001
xf
; 1
0010
f
0100
110100
0001
0101 22 fxxxfff

167
xf
0100
10
000010
0001
1011
ffff
22
1000
1000
110 xffx
.
Arribats a aquest punt, ja podem calcular la matriu associada a l’aplicació en base canònica escrivint les imatges en la base i posant com a columnes els següents vectors:
100101000011
CCF .
b) El càlcul de la matriu 12F és directe, ja que tenim totes les imatges de la base, i
posar-les com a combinació lineal de la base 2B és immediat, per tant:
010000010010
12F .
c) Com es pot observar, el rang de la matriu CCF és 3, i per tant podem deduir:
si rang( CCF ) = 3 dim Imf = 3 dim kerf = 4 – 3 = 1.
Com que fKer
1011
, podem prendre aquest vector com a base del nucli, ja
que sabem que dim kerf = 1.
d) Hem de calcular la matriu associada a l’aplicació composta:
2222 RxPM gf
x 321 BBB .
Sabem que la matriu associada a l’aplicació composta 13H està formada per la multiplicació de les matrius de les aplicacions de la següent forma:
122313 ·FGH ,
essent 23G la matriu associada a l’aplicació g i 12F la matriu associada a l’aplicació f.

168
La matriu 23G la trobarem posant en columna les components referides a la base 3B
de les imatges de la base 2B de l’aplicació:
210101
1113
2
3
2323 bbb xxgxggG .
Per tant, la matriu 13H quedarà com:
02010110
010000010010
·210101
13H .
e) dim kerf = 1 no injectiva. dim Imf = 3 = dim xP2 exhaustiva. Com que és exhaustiva, però no injectiva no és bijectiva.
Problema R.7
A 2R es defineixen els següents endomorfismes1 r i e:
22: RRr tal que
cossinsincos
'
'
yxyyxx
. '' ,, yxyx
22: RRe tal que
y
x
ySyxSx
'
'
.
'' ,, yxyx L’endomorfisme r correspon a la rotació d’un punt d’un angle α, mentre que l’endomorfisme e correspon a l’escalat d’un punt en un factor xS sobre l’eix x, i en un factor yS sobre l’eix i. a) Trobeu les matrius de 2x2, R i E, corresponents a aquests endomorfismes,
expressades en base canònica. b) Volem rotar primer, i després escalar un punt de 2R . Trobeu la matriu en base
canònica que ens permet fer aquestes transformacions directament. c) Tenim un triangle definit a 2R per a aquests 3 punts: 1,1,1,0,0,1 . Trobeu la
nova posició d’aquest triangle si primer rotem 2
i després escalem en un factor 2
l’eix x, i en un factor 3 l’eix i.
1 Un endomorfisme és una aplicació lineal dins d’un mateix espai vectorial, és a dir, tant l’espai de sortida com el d’arribada són el mateix espai vectorial.

169
SOLUCIÓ:
a)
cossinsincos
)1,0(cos0,1sincos,sin1,0)1,0(sin0,1cossin,cos0,1
CCRr
r.
y
xCC
yy
xx
SS
ESSe
SSe0
0)1,0(0,10,01,0)1,0(00,10,0,1
.
b) Si primer volem fer una rotació i després una translació, caldrà aplicar primer
l’aplicació r i després l’aplicació e, quedant el conjunt de les dues com una aplicació composta:
CCCC
er
ERRRR 222
.
Per tant, la matriu de l’aplicació composta, en base canònica, serà:
·cos·sin·sin·cos
cossinsincos
·0
0
yy
xx
y
xCCCCCC SS
SSS
SREH .
c) Donades les dades, tenim que 2 , 2xS i 3yS . Substituint aquests valors
en la matriu anterior, aquesta ens queda de la següent manera:
0320
·cos3·sin3·sin2·cos2
CCH .
Si multipliquem cada punt del triangle, posant-los com a columnes dins d’una matriu de punts P, per aquesta matriu:
'303220
110101
·3020
PPHCC
.
Problema R.8
Sigui f la següent aplicació lineal entre polinomis:
221
)(2)()()(
xbabxabxafbxaxPxPf
.
També tenim definides les següents bases:

170
xB 1,11 base de )(1 xP ; xxB ,,12 2 base de )(2 xP .
a) Trobeu la matriu associada a l’aplicació f, amb base B1 de sortida i base B2 d’arribada 21BBF .
b) Trobeu una base del nucli de l’aplicació. c) Trobeu una base de la imatge de l’aplicació.
SOLUCIÓ:
a)
2221 )1()1(BBBB xffF
102122
22)1(
2)1(
212
2
BBFxxxf
xf
.
b)
.
c) )()2()(2)( 222 xxbxaxbabxabxaf
22 ,2Im xxxfBase , dim Imf = 2.
Problema R.9
Donada l’aplicació lineal f: 3 3 i sabent que:
S = {(0, 0, –1), (1, 0, –1), (0, 1, 0)} f(0, 0, –1) = (2, –5, –3) f(1, 0, –1) = (3, 0, –3) f(0, 1, 0) = (0, 3, 0).
a) Trobeu la matriu de f respecte de les bases S de sortida i canònica d’arribada.

171
b) Trobeu la matriu de f respecte de les bases canònica de sortida i canònica d’arribada.
c) Donat el subespai V, que verifica les condicions:
(x, i, z) V
020342
zyxzyx
.
Trobeu una base de V i calculeu l’antiimatge dels vectors que formen aquesta base.
SOLUCIÓ:
a) Directament de l’enunciat, a partir de les imatges dels tres vectors de la base S, que per defecte estan expressats en la base canònica de ℝ3:
033305032
SCF .
b) La matriu que ens demanen la podem calcular aprofitant el càlcul de l’apartat a) i fent un canvi de base en l’espai origen, concretament passant de la base S a la canònica amb la matriu de canvi de base CCS, de forma que la matriu que ens demanen serà FCC = FCS · CSC. Calculem doncs CCS, a partir de plantejar tres sistemes d’equacions similars en els quals posem cada vector de la base canònica de ℝ 3 com a combinació lineal dels vectors de la base S, és a dir:
010001101
)0,1,0(0)1,0,1(0)1,0,0(1)1,0,0()0,1,0(1)1,0,1(0)1,0,0(0)0,1,0()0,1,0(0)1,0,1(1)1,0,0(1)0,0,1(
CSM .
Per arribar a la solució indicada hem resolt el sistema de forma heurística, ja que els vectors de la base S ens permeten intuir com arribar a expressar a partir d’aquests els de la base S. Finalment:
300535201
010001101
·033305032
CCM .
c) Comencem per trobar la base del subespai V, trobant la solució del sistema
d’equacions platejat, que és un sistema compatible indeterminat:

172
)0,1,2()0,,2(),,(02
020342
yyyzyxz
yxzyxzyx
.
Per tant, el subespai V es pot expressar com )0,1,2(V . Per tal de trobar l’antiimatge del vector (–2, 1, 0), hem de trobar FCC
-1. Si procedim utilitzant un dels mètodes d’inversió de matrius, arribem a:
3/1003/53/13/53/201
1CCF .
Per tant, ja podem calcular l’antiimatge del vector (–2, 1, 0):
03/11
2
012
3/1003/53/13/53/201
.
L’antiimatge és el vector (–2, 11/3, 0).
Problema R.10
Siguin 223: xMf i tPMg x 322: dues aplicacions lineals, on P3[t] és
l’espai vectorial format pels polinomis de grau ≤ 3. Sabem que:
21)(
),,(
tt
AtAg
zyyyyx
zyxf
.
a) Trobeu les matrius associades a f i g respecte de les bases canòniques respectives.
b) Trobeu una base i la dimensió de kerf i de Imf. No deixeu la resposta en components.
c) Raoneu si f és injectiva, exhaustiva o bijectiva. d) Trobeu una base i la dimensió de kerh i de Imh, on h = g o f. No deixeu la
resposta en components.

173
SOLUCIÓ:
a) La base canònica de 3 és )1,0,0(),0,1,0(),0,0,1( i la base canònica de 22M és:
1000
,0100
,0010
,0001
.
Calculem, doncs, la matriu de l’aplicació f en aquestes bases. Per trobar la matriu associada a f calculem les imatges de la base de sortida i les expressem en coordenades de la base d’arribada:
Cf |0,0,0,10001
)0,0,1(
,
Cf |1,1,1,11111
)0,1,0(
,
Cf |1,0,0,010
00)1,0,0(
.
Escrivim les coordenades en columna i obtenim així la matriu:
110010010011
CCF .
Considerem la base canònica de tP3 com 32 ,,,1 ttt , calculem ara la matriu associada a g en les bases canòniques:
Cttt
ttt
tg |2 0,0,1,000
,10001
,10001
,
Cttt
ttt
tg |22
2
2 0,1,0,000
,10010
,10010
,
Cttt
ttt
tg |22
2 0,1,0,000
,10100
,10100
,
Cttt
ttt
tg |33
22 1,0,0,000
,11000
,11000
.
Escrivim les coordenades en columnes i obtenim així la matriu:

174
1000011000010000
CCG .
b) Com ja sabem, kerf = 0),,(|,, 3 zyxfzyx , per tant, un element de kerf
compleix que:
0000
zyyyyx
,
que és equivalent a què compleix el següent sistema d’equacions homogènies:
000
0
zyyy
yx
la solució del qual és la solució trivial )0,0,0(),,( zyx .
Per tant, kerf = 0 i dim kerf = 0.
Abans de calcular Imf podem calcular la seva dimensió de diverses formes.
Mètode 1: Sabem que:
dim Imf = rang( BCBCF ) = rang
110010010011
= 3,
ja que és una matriu amb només 3 columnes, per tant, el seu rang és com a màxim 3 i si agafem el determinant del menor format per la primera, segona i quarta fila ens dóna:
01110
010011
.
Llavors, el rang és com a mínim 3 i podem concloure que dim Imf és 3. Mètode 2:
dim 3 = dim kerf + dim Imf.

175
Per tant,
dim Imf = dim 3 – dim kerf = 3 – 0 = 3. Com ja sabem, les imatges d’una base formen un sistema de generats de Imf. Per tant,
Imf =
10
00,
1111
,0001
,
i aquestes matrius són linealment independents, ja que dim Imf = 3, per tant, formen una base d’aquest subespai amb tota seguretat.
c) Com que dim kerf = 0, aleshores f és injectiva. Com que dim Imf dim( 22M ), aleshores f no és exhaustiva. Com que f no és injectiva tampoc serà bijectiva.
d) Podem trobar la matriu de h associada a la base canònica fent el següent
producte de matrius:
CCCCCC FGH ,
110020011000
110010010011
1000011000010000
CCH .
Com que
02110
020011
,
fent un raonament idèntic al del segon apartat arribem a la conclusió que dim Imh = 3. Així doncs, les columnes de CCH formen una base de Imh, i tenint en compte que els vectors estan en la base canònica de polinomis:
Imh = 332 ,2, ttttt .
Per tant,
dim kerh = dim 3 – dim Imh = 3 – 3 = 0, i per tant
kerh = 0, i dim kerh = 0.

176
RESUM En aquesta sessió s’han presentat un conjunt d’exercicis per posar en pràctica els conceptes estudiats al capítol 4.
177
SESSIÓ 19: Exercicis proposats corresponents al capítol 4
FITXA DE LA SESSIÓ Nom: Exercicis proposats corresponents al capítol 4 Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Posar en pràctica els conceptes estudiats al capítol 4.
CONTINGUTS Exercicis proposats del capítol 4.
4.7.2. Exercicis proposats
Problema P.1
Discutiu si les següents aplicacions són o no lineals: a )
zyxxfzyxxf
432)(,,: 3
.
b)
yxyxxfyxxf
,2,1)(,: 32
.
c)
MAAMAfaAMMf
ij
nnnn
)(:
.

178
On M és una matriu de nnM qualsevol.
SOLUCIÓ:
a) És lineal. b) No és lineal. c) És lineal.
Problema P.2
Sigui 35: f l’aplicació lineal definida per:
xf = ƒ(x, i, z, s, t) = (x + 2i + z – 3s + 4t, 2x + 5i + 4z – 5s + 5t, x + 4i + 5z – s – 2t).
Trobeu una base i la dimensió de la imatge de ƒ.
SOLUCIÓ:
Base de la imatge:
2,1,0,3,0,1 B ; dim Imf = 2.
Problema P.3
Sigui 33: g l’aplicació definida per:
)(xg = g ((x, i, z)) = (x + 2i – z, x + 3i, x + i – 2z).
Trobeu una base i la dimensió del nucli de g.
SOLUCIÓ:
Base del nucli:
)1,1,3( B ; dim kerf = 1.

179
Problema P.4
Sigui l’aplicació lineal ƒ: R4 → R³ que té per matriu associada en base canònica:
313832531
1321F .
Trobeu una base i la dimensió de: a) La imatge de ƒ. b) El nucli de ƒ.
SOLUCIÓ:
a) Base i dimensió de la imatge:
)8,3,2(),3,1,1(B , dim Imf = 2. b) Base i dimensió del nucli:
)1,0,3,7(),0,1,2,1( D , dim kerf = 2.
Problema P.5
Sigui l’aplicació lineal 33: f que té per matriu associada en base canònica:
4121353521
F .
Trobeu una base i la dimensió de: a) La imatge de ƒ. b) El nucli de ƒ.
SOLUCIÓ:
a) Base i dimensió de la imatge:
)1,5,2(),2,3,1( B , dim Imf = 2.
b) Base i dimensió del nucli:
)1,2,1( D , dim kerf = 1.
Problema P.6

180
Sigui P10[x] l’espai vectorial dels polinomis reals de grau ≤ 10. Sigui l’aplicació lineal:
D4: P10[x] → P10[x] definida per
dxxpdxpD )())((
44 ,
és a dir, la quarta derivada. Trobeu una base i la dimensió de: a) La imatge de D4. b) El nucli de D4.
SOLUCIÓ:
a) Base de la imatge = {x6, x5, x4, x3, x2, x1, 1}. dim ImD4 és 7. b) Base del nucli = {x3, x2, x1, 1} és base de kerD4 i la seva dimensió és 4.
Problema P.7
D’una aplicació lineal ƒ: R³ → R³ coneixem les imatges següents:
f(0, 1, 0) = (0, 2, 0); f(1, 0, 0) = (1, 2, 0). a) Trobeu la imatge del vector v = (0, 0, 1) sabent que el vector b = (1, 1, 1) pertany
al nucli de ƒ. b) Trobeu la matriu de l’aplicació en base canònica. c) Trobeu la matriu de l’aplicació en la base B = {(1, 0, 0), (1, 1, 0), (1, 1, 1)} de 3
(tant de sortida com d’arribada).
SOLUCIÓ:
a) ƒ(0, 0, 1) = (–1, – 4, 0).
b)
000422101
CCF .
c)
000042031
BBF .

181
Problema P.8
Siguin E i F dos espais vectorials sobre ℝ de dimensions 3 i 4 respectivament. Siguin 321 ,, eee
base de E i 4321 ,,, uuuu base de F. Sigui G un espai vectorial
sobre ℝ de dimensió 2, i 21 , vv una base d’aquest. Es consideren les aplicacions
lineals:
ƒ: E → F, g: F → G,
que, en les bases considerades en cada espai, tenen per matriu associada respectivament:
0102
1110
0101
fA i
32
00
21
11
gA .
a) Trobeu el nucli de les aplicacions ƒ i g, així com la dimensió dels respectius
subespais imatge. b) Trobeu la matriu associada a g o f en les bases E de sortida i G d’arribada. c) Trobeu kerg o f i Img o f.
SOLUCIÓ:
a) kerf = 0
, )1,0,35,
31(),0,1,0,0(
gKer .
b)
22
53
11
gofA .
c) ,)5,3(,)1,1(Im VVgof
EgofKer )1,0,2( .
Problema P.9 Aquest problema s’ha de lliurar
Donada l’aplicació lineal ƒ de la qual coneixem les següents imatges:
ƒ: 4 → 4 (1, 0, 0, 0) → (2, –1, –1, 0) (0, 1, 0, 0) → (–1, 1, 0, –1) (0, 0, 1, 0) → (1, 0, 1, –1) (0, 0, 0, 1) → (0, –1, –1, 2).

182
Trobeu: a) La imatge del vector v = (2, 5, 6, 8). b) L’antiimatge, en el cas que existeixi, dels vectors w1 = (0, –2, –4, 4) i w2 = (1, 0, 0,
1). c) Una base i la dimensió de l’espai imatge de ƒ. d) Una base i la dimensió del nucli de ƒ. Pertany el vector al nucli?
RESUM En aquesta sessió s’ha presentat un recull de problemes proposats del capítol 4.

183
SESSIÓ 20: Aplicacions d’ALGTEC que fan servir conceptes relacionats amb les aplicacions lineals
FITXA DE LA SESSIÓ Nom: Aplicacions d’ALGTEC que fan servir conceptes relacionats amb les
aplicacions lineals Tipus: pràctica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’ha estudiat el concepte d’aplicació lineal i diferents conceptes associats. També s’han presentat diferents exercicis per posar en pràctica els coneixements assolits.
OBJECTIUS Veure aplicacions reals del món de l’enginyeria, on les aplicacions lineals són una part fonamental.
CONTINGUTS Descripció de diferents aplicacions de la plataforma ALGTEC per estudiar aplicacions reals del món de l’enginyeria, on les aplicacions lineals són una part fonamental.
4.8. Aplicacions d’ALGTEC que fan servir els conceptes tractats al capítol 4
4.8.1. L’àlgebra al món dels gràfics per ordinador En aquest exemple es planteja la necessitat de girar, de desplaçar o d’escalar diferents objectes en dues o tres dimensions, i per a això es torna a representar en forma matricial l’objecte a tractar. Com ja es va veure a l’exemple pràctic titulat Generació de moviment, els objectes definits pels punts que els formen poden representar-se matricialment col·locant les coordenades del punts en cadascuna de les columnes de la matriu. Es tracta, per tant, d’obtenir la nova posició de l’objecte multiplicant aquest per la matriu associada a l’aplicació lineal corresponent a la transformació que es desitja realitzar. És a dir, si la matriu O representa l’objecte en la

184
seva posició original i la matriu T representa la transformació a realitzar, la nova posició de l’objecte es calcularà del següent mode: On = T · O. Al llarg de l’exposició es presenten les matrius associades a cadascuna de les transformacions indicades. Posteriorment, es planteja la necessitat de fer diverses transformacions seguides, per això apareix el concepte de composició d’aplicacions lineals. Calculant la composició de les aplicacions corresponents s’obté una nova aplicació que realitza, de forma més eficient, les transformacions desitjades. Així, si s’aplica a un objecte una rotació (R) i posteriorment un escalat (E), la matriu C associada a la composició de les dues transformacions serà: C = E · R. Al mòdul d’experimentació associat es poden seleccionar diferents objectes i aplicar les transformacions citades abans. En pantalla apareix la matriu associada a la transformació que es realitza en cada instant, la matriu corresponent a la composició de totes les transformacions realitzades en l’objecte fins a aquest moment, i la nova posició de l’objecte dibuixada en tres dimensions.
4.8.2. Composició d’aplicacions lineals en la generació d’ombres d’objectes 3D
Aquesta nova aplicació es basa exactament en els mateixos conceptes algebraics que l’aplicació titulada L’àlgebra al món dels gràfics per ordinador, i l’única cosa que canvia és la transformació a realitzar sobre els objectes. En aquest cas, es persegueix projectar l’ombra d’un objecte sobre el plànol del terra. A l’exposició corresponent es proposa obtenir la matriu associada a la transformació que projecta l’ombra a partir de la composició de dues transformacions independents. El fil argumental de l’explicació és, per tant, molt similar al seguit a l’exemple citat anteriorment. Al mòdul d’experimentació es pot seleccionar la direcció de la qual provenen els raigs de llum (angle acumulat), mantenint constant l’angle amb el terra (zenital o d’elevació). A través dels cursors del teclat es poden variar la direcció dels raigs de llum, i en pantalla s’actualitza en temps real la nova ombra projectada. A més, s’ha afegit a aquest mòdul la possibilitat de combinar aquest exemple d’aplicació amb un altre ja vist amb anterioritat (Generació de moviment). És a dir, es pot modificar la posició d’un objecte generant aquesta nova posició com una combinació lineal de posicions fixes de l’objecte, i, a continuació, veure projectada sobre el terra l’ombra de l’objecte en la nova posició.
RESUM En aquesta sessió s’han presentat diferents aplicacions de la plataforma ALGTEC per estudiar aplicacions reals del món de l’enginyeria, on les aplicacions lineals són una part fonamental.

185
SESSIÓ 21: Introducció als endomorfismes i als conceptes de valor i de vector propi
FITXA DE LA SESSIÓ Nom: Introducció als endomorfismes i als conceptes de valor i de vector propi Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: Apunts Llibres (format [AutorXXXX]) Articles Exercicis Documentació pràctica
o Bibliografia complementària: Apunts Llibres (format [AutorXXXX]) Articles Exercicis Documentació pràctica
OBJECTIUS Els objectius d’aquesta sessió són estudiar el concepte d’endomorfisme i observar quina és la problemàtica que es planteja en estudiar-lo i com pot abordar-se. Seguidament s’estudiaran altres conceptes relacionats amb els endomorfismes.
CONTINGUTS En aquesta sessió es defineix què és un endomorfisme i es planteja la problemàtica derivada del seu estudi i la seva resolució. S’inclouen també les definicions de subespai invariant, de vector propi i de valor propi.
5. Diagonalització d’endomorfismes
5.1. Introducció En aquest apartat s’estudia el concepte d’endomorfisme i es planteja quina és la problemàtica derivada del seu estudi.

186
5.1.1. Definició Un endomorfisme és una aplicació lineal d’un espai vectorial E en ell mateix.
EEf : nE dim },....,,{ 21 neeeB base de E.
5.1.2. Plantejament del problema
Sigui A la matriu associada a f en la base B (tant de sortida com d’arribada):
BB xAxf nxnMA . A continuació ens plantegem quantes operacions són necessàries per trobar Bxf :
nnnnn
n
BB
y
y
x
x
aa
aaxAxf
1
1
111
.
Nre. d’operacions Per cada jy Total productes n n x n sumes n – 1 n x (n – 1)
En total hem de fer nn productes i 1 nn sumes. En canvi, si la matriu A fos diagonal el nombre d’operacions seria molt inferior:
nnnn y
y
x
x
aa
a
000000
22
11
.
Nre. d’operacions Per cada jy Total productes 1 n sumes 0 0
En total hem de fer, només, n productes. Per tant, la importància de la diagonalització d’endomorfismes (aconseguir que la matriu A sigui diagonal) és la simplificació dels càlculs. L’objectiu de la diagonalització serà, donat un endomorfisme, trobar una base B’ en la qual la matriu associada a l’endomorfisme sigui diagonal (però això no sempre és possible).

187
APPD
PAP
basedecanvi
fbasedecanvi
BBBBEEEE
1
1 ''
.
On: A: matriu associada a f en la base B (tant de sortida com d’arribada). D: matriu diagonal associada a f en la base B’ (tant de sortida com d’arribada). P: matriu canvi de base de B’ a B. P -1: matriu canvi de base de B a B’. Aleshores: D = P-1AP o A = PDP-1.
5.2. Subespai invariant
Sigui EEf : un endomorfisme. Diem que un subespai vectorial U de E és invariant per a f si UUf , és a dir:
UufUu .
Per exemple, fKerfE Im,,0,
són subespais invariants. Els subespais invariants de dimensió 1 s’anomenen direccions principals de f .
Proposició
Sigui S un subespai vectorial invariant de E per a f , amb 1dim S (S és una direcció principal). Aleshores:
,Su uuf K
SuuSu 0, .
5.3. Vector propi i valor propi En aquest apartat s’estudien les definicions de vector propi i de valor propi, i es veuen dues proposicions vinculades amb aquests conceptes.

188
5.3.1. Definició
Sigui EEf : un endomorfisme. Un vector Eu , 0
u és un vector propi (vep) de f si K tal que uuf , direm aleshores que és el valor propi (vap) associat al vep de u . Un vep genera un subespai vectorial invariant per a f de dimensió 1, és a dir, una direcció principal.
5.3.2. Proposició 1
Sigui Eu , 0 u un vep de f , aleshores K tal que uuf .
El vap associat a un vep és únic.
Demostració
Per reducció a l’absurd: suposem que existeixen dos vaps diferents , associats al vep u :
0)()(0 uuuufufuufuuf
,
ja que 0
u . També es veu molt clarament per la definició d’aplicació, només una imatge per vector.
5.3.3. Proposició 2
K és vap de f 0IAKer
on A és la matriu associada a f.
Demostració
Si u és vep amb vap associat : uuf 0)(
uuf 0)()( uIuf 0uIA
)( IAKeru
,
K és vap de f 0
uEu tal que uuf ; 0
uEu tal que )( IAKeru
;
0IAKer
)( .

189
Per tant:
K és vap de f 0IAKer0IAKer )(dim)(
, i )( IAKeru
, 0
u , u és un vep de vap .
5.3.4. Exemples
Exemple 1
Els vectors del Kerf diferents del 0
són veps associats al vap 0 :
uufuKerfu 000, .
Exemple 2
Si IdkF ,
xkx
xk
kx
kx
x
x
kk
kxFxf
nnn
111
00
0.
,Ex 0
x serà vep associat a l’únic vap de k.
Exemple 3
Sigui
2321
A
matriu associada a un endomorfisme de 2 en la base canònica. a) Comproveu que 32u i 11 v són veps.
uuuAuf
4
32
4128
32
2321
)( vep de vap 4,
vvvAvf
1
11
111
11
2321
)( vep de vap –1.
b) Matriu associada a f en la base 11,32 vuB
,
190
10
04BBA .
RESUM En aquesta sessió s’ha estudiat el concepte d’endomorfisme i s’ha destacat quina és la problemàtica que es planteja en estudiar-lo i com pot ser abordada. S’han vist també els conceptes de subespai invariant, de vector propi i de valor propi.

191
SESSIÓ 22: Polinomi característic i concepte de diagonalització
FITXA DE LA SESSIÓ Nom: Polinomi característic i concepte de diagonalització Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior s’han introduït els conceptes d’endomorfisme, de vector propi i de valor propi.
OBJECTIUS Estudiar el concepte de polinomi característic i el procediment de diagonalització.
CONTINGUTS Aquesta sessió inclou la definició de polinomi característic i estableix el procediment per diagonalitzar la matriu d’un endomorfisme.
5.4. Polinomi característic
5.4.1. Definició Considerem un espai vectorial E de dimensió n, essent B una base de E:
nE dim },....,,{ 21 neeeB base de E.
Considerem també:
EEf : endomorfisme amb matriu associada
nnn
n
aa
aaA
1
111
.

192
Aleshores podem definir
EEIf :
com un endomorfisme amb matriu associada
nnn
n
aa
aaIA
1
111
.
Es compleix que:
)(dimdim)Im(dim IfKerEIf )(dim)( IfKernIArang .
Els veps seran aquells vectors que facin que la 0IAKer )(dim , és a dir,
nIArang )( , que representa que 0IA )det( .
K és vap de f 0IAKer0IAKer )(dim)(
; nIArang )( ; 0)det( IA .
Definim el polinomi característic p(x) com:
)det()( xIAxpxaa
axa
nnn
n
1
111
,
que és un polinomi de grau n.
K és vap de f 0)det()( IAp ; és arrel del polinomi característic.
Existeixen n possibles arrels del polinomi característic, per tant, com a màxim hi ha n vaps diferents n ,........,, 21 ; i )( IfKeru i
, 0
u , u és un vep de vap i .
5.4.2. Proposició
El polinomi característic d’un endomorfisme és invariant, no depèn de la base escollida. Dit d’una altra manera, tot endomorfisme té associat un únic polinomi característic.

193
Demostració
Considerem el següent esquema:
22
111
2
1
:
:
BBEEf
PPBBEEf
A
A
PAPA 11
2 .
On: A1 matriu associada a f en la base B1. A2 matriu associada a f en la base B2. P i P-1 matrius canvi de base. Es pot definir:
)det()( 11 xIAxp polinomi característic de A1. )det()( 22 xIAxp polinomi característic de A2.
Vegem ara que són iguals:
)()det(det)det(det))(det()det(
)det()det()det()det()(
1
111
111
11
11
111
11
122
xpxIAPxIAPPxIAPPIxPPAP
IPxPPAPPIxPPAPxIPAPxIAxp
.
5.4.3. Exemples
Exemple 1
Sigui 33: f un endomorfisme amb matriu associada en base canònica:
300121
012A .
Calculeu els vaps i els veps. Podem trobar una base de veps?

194
SOLUCIÓ:
Plantegem el polinomi característic:
)1()3(300
121012
det)( 2
xx
xx
xIxAxp .
Arrels de xp :
23 11 m , 11 22 m .
A continuació estudiem els veps associats a cadascun dels vaps que acabem de trobar:
veps associats al vap 31 : )3( IfKer .
01100
00
000111
011xzyx
zxyxx
zyx
,
011)3( IfKer .
veps associats al vap :12 )( IfKer .
0110
000
200111
011
xzyx
zxy
zyx
,
011)( IfKer .
No podem trobar una base de veps perquè com a màxim només hi ha 2 veps linealment independents.
Exemple 2
Sigui 33: f un endomorfisme amb matriu associada en base canònica:
563053064
A .

195
Calculeu els vaps i veps. Podem trobar una base de veps?
SOLUCIÓ:
vap 51 associat als veps: 100)5( IfKer . vap 22 associat als veps: 377)2( IfKer . vap 13 associat als veps: 012)( IfKer .
5.5. Diagonalització
5.5.1. Introducció
Sigui E un espai vectorial sobre K de dimensió n ( nE dim ). Sigui EEf : un endomorfisme. Quan es pot diagonalitzar aquest endomorfisme? Si podem trobar una base de E de veps de f, aleshores la matriu associada a f en aquesta base serà diagonal. Suposem que existeixen n veps linealment independents nvvv
,,, 21 amb vaps
associats n ,........,, 21 (no necessàriament diferents). Càlcul de la matriu associada a f en la base nvvvB
,,, 21 de sortida i d’ arribada:
sabem que
nvvvvvf
00 211111 ,
nnnnn vvvvvf
21 00 .
Per tant:
0011
Bvf ,
nBnvf 00 ,
n
BBF
000
00000
2
1
.
On n ,...,, 21 són els vaps associats a cada vep de la base.

196
Direm que un endomorfisme és diagonalitzable si existeix una base de veps, és a dir, si existeixen n veps linealment independents. Preguntes a discutir: Quantes bases diferents de veps es poden trobar si l’endomorfisme es pot
diagonalitzar? La resposta és infinites. Quantes matrius diagonals associades al mateix endomorfisme es poden trobar? En
aquest cas la resposta és finites, ja que seran les possibles combinacions en diferents posicions dels mateixos vaps).
5.5.2. Proposició 1 Veps corresponents a vaps diferents són linealment independents.
Demostració
Sigui 01
u vep de vap K1 111 uuf . Sigui 02
u vep de vap K2 222 uuf . Considerant 21 : vegem que 21 ,uu
són linealment independents (segons la condició d’independència lineal):
?00 212211 uu .
If 1 és aplicació lineal:
0)()()(
)()())((0
22212
2211112221112211112211
22111221122111
uuuuuuuufuf
uuuufuuIf
,
000
0111
2
2211
uuu.
5.5.3. Proposició 2
Siguin K21 , , 21 , vaps d’un endomorfisme f, aleshores:
0)()( 21
IfKerIfKer .

197
Demostració
0)()()()(
)()( 2122
1121
xx
xxfIfKerxxxfIfKerx
IfKerIfKerx
00)( 21
xx ja que 21 .
Si és aplicació, un vector no pot tenir dues imatges diferents, segons indica la pròpia definició d’aplicació.
5.5.4. Teorema 1 De les proposicions anteriors podem extreure la següent conseqüència: si un endomorfisme f té n vaps diferents, és diagonabilitzable. Si hi ha n ,........,, 21 n vaps diferents n veps linealment independents nvvv
,,, 21 f diagonalitzable, amb matriu associada en la base de veps:
n
BBF
000
00000
2
1
.
Si el nombre de vaps és més petit que n, suposem que hi ha p valors propis diferents on p < n , p ,........,, 21 , i que el polinomi característic descomposa en factors lineals:
pmp
mmn xxxxIAxp )........()()()1()det()( 2121 ,
on mi és la multiplicitat de cada i i
p
ii nm
1.
Aleshores, el teorema indica que:
un endomorfisme f és diagonabilitzable ii mIAKer )(dim( pi ....1 .
5.5.5. Teorema 2
Sigui nnMA definida sobre el cos dels complexos. Aleshores A té almenys un vap. NOTA: això no és cert si treballem sobre el cos dels reals.

198
Exemple
Sigui:
2/14/1
52/1A .
El polinomi característic és:
12/14/152/1 2
x
xx
xp .
Arrels reals de xp : no en té.
Arrels complexes de xp :
jj
2
1
.
Si treballem sobre no hi ha vaps ni veps, per tant f no és diagonalitzable. Si treballem sobre els complexos hi ha dos vaps diferents, per tant f és diagonalitzable:
veps associats al vap )21,5()(:1 jjIfKerj .
xjyyx
jj
21
51
00
2/14/152/1
.
veps associats al vap )21,5()(:2 jjIfKerj .
xjyyx
jj
21
51
00
2/14/152/1
.
De forma que:
j
jD
00
jjP
2/12/155
.
RESUM En aquesta sessió s’ha estudiat la definició de polinomi característic i s’ha establert el procediment per diagonalitzar la matriu d’un endomorfisme.

199
SESSIÓ 23: Exercicis de diagonalització
FITXA DE LA SESSIÓ Nom: Exercicis de diagonalització Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: Apunts Llibres (format [AutorXXXX]) Articles Exercicis Documentació pràctica
o Bibliografia complementària: Apunts Llibres (format [AutorXXXX]) Articles Exercicis Documentació pràctica
PRECEDENTS A les sessions anteriors s’ha presentat el concepte d’endomorfisme i el mecanisme de diagonalització.
OBJECTIUS Posar en pràctica els conceptes estudiats a les sessions anteriors.
CONTINGUTS Exercicis resolts i proposats per posar en pràctica els conceptes estudiats a les sessions anteriors.
5.6. Exercicis
5.6.1. Exercicis resolts

200
Problema R.1
Sigui f un endomorfisme amb matriu associada en base canònica:
466353331
A .
a) És diagonalitzable? b) vaps i veps. c) Matriu diagonal.
SOLUCIÓ:
a) El polinomi característic és:
)4()2(1612466
353331
det)( 23
xxxxx
xx
IxAxp .
Les arrels de xp :
22 11 m
14 22 m .
2)2(dim 1 mIfKer ? 1)4(dim 2 mIfKer ?.
1213666333333
3)2(3)2Im(dimdim)2(dim mrangIArangIfEIfKer
2123066393333
3)4(3)4Im(dimdim)4(dim mrangIArangIfEIfKer
.
Per tant, f és diagonalitzable. b) veps associats al vap :21 )2( IfKer .
110101000
666333333
yxzyxxyz
yyxx
zyx
110101)2( IfKer .

201
veps associats al vap :42 )( IfKer .
2112
000
066393333
xzyxxzyx
zyx
211)4( IfKer .
c) Trobeu les matrius P i D.
121110011
P
200040002
D .
Es pot comprovar que 1 PDPA .
Problema R.2
Sigui f un endomorfisme amb matriu associada en base canònica:
131111322
A .
a) És diagonalitzable? b) vaps i veps. c) Matriu diagonal.
SOLUCIÓ:
a) El polinomi característic és:
)1)(3)(2(652131111322
det)( 23
xxxxxxx
xx
IxAxp .
Arrels de xp :
12 11 m 13 22 m 11 33 m .

202
f és diagonalitzable perquè té tres vaps diferents (i 3dim E ). b) veps associats al vap :21 )2( IfKer (11, 1, –14).
veps associats al vap :32 )3( IfKer (1, 1, 1) . veps associats al vap 13 : )( IfKer (–1, 1, 1).
c) Trobeu les matrius P i D.
100030002
D .
Es pot comprovar que 1 PDPA .
Problema R.3
Sigui f un endomorfisme amb matriu associada en base canònica:
315010204
A .
a) És diagonalitzable? b) vaps i veps.
SOLUCIÓ:
a) El polinomi característic és:
)2()1()2)(1(315
010204
det)( 22
xxxxxx
xx
IxAxp .
Arrels de xp :
21 11 m 12 22 m .
2)(dim 1 mIfKer ? 1)2(dim 2 mIfKer ?.

203
1123215000205
3)(3)Im(dimdim)(dim mrangIArangIfEIfKer
.
f no és diagonalitzable.
b) veps associats al vap :11 )( IfKer (1, 0, –5/2). veps associats al vap :22 )2( IfKer (1, 0, –1).
f no és diagonalitzable perquè no podem trobar tres veps linealment independents.
5.6.2. Exercicis proposats
Problema P.1
Sigui f un endomorfisme amb matriu associada en base canònica:
110123
031A .
a) És diagonalitzable? b) vaps i veps. c) Matrius P (regular) i D (diagonal) tals que A = P D P-1. SOLUCIÓ:
400030001
D
113520
331P
210651015
2107
7011P .
Problema P.2
Sigui f un endomorfisme amb matriu associada en base canònica:
201111001
A .

204
a) És diagonalitzable? b) vaps i veps. c) Matrius P (regular) i D (diagonal) tals que A = P D P-1.
SOLUCIÓ:
200010001
D
101110001
P
101111
0011P .
Problema P.3
Sigui f un endomorfisme amb matriu associada en base canònica:
001111
001A .
a) És diagonalitzable? b) vaps i veps. c) Matrius P (regular) i D (diagonal) tals que A = P D P-1.
SOLUCIÓ:
100010000
D
011101010
P
111001101
1P .
Problema P.4
Sigui f un endomorfisme amb matriu associada en base canònica:
111111111
A .
a) És diagonalitzable? b) vaps i veps. c) Matrius P (regular) i D (diagonal) tals que A = P D P-1.

205
SOLUCIÓ:
200020001
D
111101011
P
121112
111
311P .
Problema P.5
Estudieu la diagonabilitat de
abA
0310
005
en funció dels paràmetres reals a i b.
SOLUCIÓ:
))(5)(1()( xaxxxpA .
a b A
1,5 a b diagonalitza
5a b no diagonalitza
1a 0b diagonalitza
1a 0b no diagonalitza
Problema P.6 Aquest problema s’ha de lliurar
Estudieu la diagonabilitat de
3150024
ab
B
en funció dels paràmetres reals a i b.

206
RESUM En aquesta sessió s’ha presentat un recull de problemes relacionats amb els conceptes estudiats d’endomorfismes i diagonalització.

207
SESSIÓ 24: Teorema de Cayley-Hamilton i aplicacions de la diagonalització de matrius
FITXA DE LA SESSIÓ Nom: Teorema de Cayley-Hamilton i aplicacions de la diagonalització de matrius Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior s’ha definit el polinomi característic i el concepte de diagonalització.
OBJECTIUS Estudiar el teorema de Cayley-Hamilton i les aplicacions de la diagonalització de matrius.
CONTINGUTS En aquesta sessió s’inclou la definició del teorema de Cayley-Hamilton, juntament amb un exemple i es detalla la seva aplicació en la inversió de matrius. A la segona part de la sessió es veuen diferents aplicacions del procés de diagonalització de matrius per reduir el nombre de càlculs necessaris en el moment de realitzar determinades operacions. S’inclou la descripció d’una aplicació real en un estudi de mercat.
5.7. Teorema de Cayley-Hamilton. Aplicació a la inversió de matrius.
5.7.1. Definició
Sigui EEf : un endomorfisme amb matriu associada A. Si p(x) és el seu polinomi característic, aleshores nnMAp 0)( .

208
Demostració
Sigui el polinomi característic:
nnxaxaxaaxIAxp 2
210)( . Definim:
nnn
n MAaAaAaIaAp 2210)( .
Sigui v un vep associat al vap . Atès que p(A) és una matriu, podem calcular el següent producte:
vAavAavAavIavAaAaAaIavAp nn
nn
2
2102
210)( .
Analitzem cada terme per separat: Veiem que el primer terme és vavIa
00 . El segon: vavAa 11 .
El tercer: vavavAavAavAAavAa 211112
22 .
Etc. El terme darrer: vavAavAavAAavAa n
nn
nn
nnn
11122 .
Per tant, si substituïm a l’equació anterior obtenim:
0·0)( 2210
2210
vvxpvaaaavAavAavAavIavAp n
nn
n .
Atès que v és un vep, aquest no pot ser l’element neutre amb el qual
nnMApvAp 0)(0)( .
5.7.2. Exemple Sigui A una matriu de 2x2 definida com:
2321
A .
El seu polinomi característic és:
4323
21)( 2
xxx
xxp .

209
Tal i com afirma el teorema de Cayley-Hamilton, podem comprovar que:
0000
4004
6963
10967
43)( 2 IAAAp .
5.7.3. Aplicació en la inversió de matrius
Sigui Auna matriu invertible, i p(x) el seu polinomi característic:
)det( xIAxp . Pel teorema de Cayley-Hamilton p(A) = 0:
nn xaxaxaaxp 2
210 , polinomi de grau n.
0)( 2210 n
n AaAaAaIaAp .
IaAaAaAa nn 0
221 , traient factor comú A i multiplicant per A-1.
10
1121 )( IAaAAAaAaIa n
n . 1
01
21 )( AaAaAaIa nn , aïllant A-1.
Per tant,
12321
0
1 1
nn AaAaAaIa
aA .
Exemple
Donada la matriu
2132
A .
Trobeu 1A . SOLUCIÓ:
1421
32)( 2
xxx
xxp
04)( 2 IAAAp
11)4()4(
IAAAIAIAIA

210
2132
4004
2132
4)4(11 IAIAA .
5.8. Aplicacions de la diagonalització en la reducció de càlculs necessaris
A continuació es veurà com la diagonalització pot reduir el nombre de càlculs a l’hora de realitzar determinades operacions bàsiques. Suposem nnMA diagonalitzable amb P i D (matriu diagonal) tals que
1 PDPA .
5.8.1. Càlcul de potències Per calcular la potència m-èssima de la matriu A s’han de realitzar m productes de la matriu A amb ella mateixa:
AAAAAm . Si considerem la matriu diagonalitzada:
111111 PPDDPPDDPDPPDPPDPPDPA mmm . En aquest cas només cal calcular la potència m-èssima de la matriu D, que és una matriu diagonal i, per tant:
si
n
D
000000000000
2
1
, aleshores
mn
m
m
mD
000000000000
2
1
.
5.8.2. Càlcul d’un polinomi avaluat per una matriu En aquest cas es tracta d’avaluar el polinomi f(t) quan t és una matriu:
m
mtatataatf 2210 .
Si considerem la versió diagonalitzada de la matriu A, les operacions a realitzar són:
11m
m2
210
1mm
122
11
10
mm
2210
PDPfPDaDaDaIaPAf
PPDaPPDaPDPaPIPaAaAaAaIaAf
)()(
.

211
Per tant,
11 )()()( PDPfPDPfAf
)(000000)(
00
00
01001 1
22
21
32
1
20
nf
faaaDf
.
5.8.3. Càlcul de l’arrel quadrada d’una matriu Es tracta del càlcul de la potència m-èssima d’una matriu pel cas concret en què m = 1/2. Si considerem la versió diagonalitzada de la matriu A, l’operació a realitzar és:
1321
1 ,,,, PPdiagPDPA n .
5.8.4. Exemple Considerant la matriu A definida com:
2321
A .
a) El valor de 4A és:
)1)(4(4361223
21)( 2
xxxxxxx
xxp .
Arrels de )(xp :
14
2
1
10
04D .
veps associats al vap :41 32)4( IfKer ,
00
2323
2
1
xx
023
023
21
21
xxxx
.
veps associats al vap :12 11)( IfKer ,
03322
2
1
xx
033022
21
21
xxxx
.

212
10
04D
13
12P
2311
511P .
Per tant,
154153102103
2311
100256
1312
51
2311
51
1004
1312 4
144 PPDA .
b) El valor f(A) essent f(t) = t3 – 7t2 + 9t – 2 és:
163217 .
5.9. Exemple desenvolupat a l’aplicació ALGTEC: Aplicació de la diagonalització de matrius en un estudi de mercat
Aplicació de la diagonalització de matrius en un estudi de mercat
En aquest exemple es planteja una situació en la qual tres empreses ofereixen el mateix producte a un nombre constant de clients. Al final de cada període d'estudi es produeixen transicions de clients entre les empreses. A l'exercici plantejat es suposa que aquestes transicions són fixes al final de cada període, i s'assumeix també que tots els clients reben subministrament d'alguna de les empreses. L'objectiu de l'exercici és analitzar com evolucionarà el mercat en el futur i quin serà, en cas de produir-se, l'estat estable final. És a dir, com quedarien repartits els clients entre les tres empreses en cas d'existir un estat estable final. La situació presentada en aquest exercici es pot modelar fàcilment amb una matriu de transicions que ens permeti conèixer el nou estat del mercat a partir de l'estat actual. Aquesta matriu està formada per les dades corresponents a les transicions entre empreses al final de cada període. L'objectiu d'aquest exercici és mostrar que la diagonalització d'aquesta matriu i la seva posterior anàlisi permeten extreure la informació que busquem. Si denominem A la matriu que modela les transicions, sabem que l'estat del mercat, transcorregut el primer període, es calcularà de la següent manera: , on correspon a l'estat del mercat al final del primer període i representa l'estat inicial (cada component del vector correspon al tant per u dels clients que reben el producte de cadascuna de les empreses). L'estat del mercat, transcorregut el segon període, es calcularà: . Així, l'estat del mercat transcorregut el període i es calcularia de la següent manera: . Si es diagonalitza la matriu A i s'expressa com , el càlcul anterior es pot simplificar d'aquesta manera: , on s'obté fàcilment elevant cada

213
valor propi de la diagonal de la matriu al valor i. Ara resulta fàcil veure que quan i tendeix a infinit, la matriu tendirà a la matriu nul·la si tots els valors propis que la formen són, en mòdul, inferiors a 1. En el nostre cas, dos valors propis són inferiors a 1 en mòdul, però el tercer pren el valor 1, per la qual cosa el vector propi associat a aquest valor propi representarà l'estat estable del mercat. De tots els vectors propis associats al valor propi 1 es selecciona aquell, la suma de termes del qual és 1, ja que és el que té una interpretació coherent en el context real plantejat. El mòdul d'experimentació associat a aquest exemple permet seleccionar l'estat inicial del mercat i veure l'evolució d'aquest després del nombre de períodes desitjat. En pantalla apareix calculat el vector propi associat al valor propi 1 de la matriu de transicions utilitzada, i es pot observar en una gràfica que, quan el nombre de períodes augmenta, l'estat del mercat tendeix a l’esmentat vector propi.
RESUM En aquesta sessió s’ha definit el teorema de Cayley-Hamilton i s’han vist diferents aplicacions de la diagonalització de matrius. Finalment s’ha presentat una aplicació de la diagonalització en un estudi de mercat.

214

215
SESSIÓ 25: Problemes resolts
FITXA DE LA SESSIÓ Nom: Problemes resolts Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’ha vist el tema d’introducció als endomorfismes.
OBJECTIUS Presentar un conjunt d’exercicis resolts que il·lustren els conceptes explicats a les sessions anteriors.
CONTINGUTS Es recull un conjunt d’exercicis resolts que il·lustren els conceptes explicats a les sessions anteriors.
5.10. Exercicis
5.10.1. Exercicis resolts
Problema R.1
Sigui f un endomorfisme de 3 amb matriu associada en base canònica:
2/1000130
ba
A .
a) Estudieu la diagonabilitat de f en funció dels paràmetres reals a i b. b) Trobeu el valor de a i b sabent que )1,12,2( x és un vep de f. c) Per a a = 1 i b = 0 trobeu les matrius P i D (diagonal) tal que A = P · D · P-1.

216
d) Sigui un sistema recursiu expressat per:
1
1
1
2/100010301
n
n
n
n
n
n
zyx
zyx
on l’estat inicial és
111
0
0
0
zyx
.
A quin estat tendeix el sistema quan n
SOLUCIÓ:
a) Calculem les arrels del polinomi característic de A:
2110)2
1)(1)((
2100
0130
)(xx
axxxxa
xxb
xaxp
.
Distingim casos segons el valor del paràmetre a:
211 aia .
Tres vaps diferents 1 = a, 2 = 1, 3 = 1/2, per tant f és diagonalitzable.
1a
Vaps 1 = 1 amb multiplicitat m1 = 2,
2 = 1/2 amb multiplicitat m2 = 1.
Serà diagonalitzable quan dim ker(f – iI) = mi , per a i = 1, 2.
Per a 1 = 1.
dim 3 = dim ker(f – I) + dim Im(f – I) dim ker(f – I) = 3 – dim Im(f – I).
dim Im(f – I)) = rang(A – I) = rang
0201
210000300
bsibsi
b
.
Per tant,
dim ker(f – I))
0102
1
1
bsimbsim
.

217
Per a 2 = 1/2.
dim 3 = dim ker(f – 1/2I) + dim Im(f – 1/2I) dim ker(f – 1/2I) = 3 – dim Im(f – 1/2I).
dim Im(f – 1/2I) = rang(A – 1/2I) = rang
bb 200002
1302
1
.
Per tant,
dim ker(f – 1/2I) = 1 = m2.
dim ker(f – iI) = mi per a i = 1, 2 b = 0.
f és diagonalitzable si a = 1 i b = 0 i f no és diagonalitzable si a = 1 i b 0.
21
a .
Vaps 1 = 1, amb multiplicitat m1 = 1.
2 = 1/2 amb multiplicitat m2 = 2. Serà diagonalitzable quan dim ker(f – iI) = mi per a i = 1, 2.
Per a 2 = 1/2.
dim 3 = dim ker(f – 1/2I) + dim Im(f – 1/2I) dim ker(f – 1/2I) = 3 – dim Im(f – 1/2I).
dim Im(f – 1/2I) = rang(A – 1/2I) = rang
bb 2
00002
1300
.
Per tant,
dim ker(f – 1/2I) = 1 m2.
f no és diagonalitzable si a = 1/2.
Resumint:
a b endomorfisme f a 1 i a ½ b diagonalitzable
a = 1 b = 0 b 0
diagonalitzable no diagonalitzable
a = ½ b no diagonalitzable

218
b) Si )1,12,2( x és un vep de f, aleshores xxf )( on és un vap de f. Imposant aquesta condició obtenim el següent sistema d’equacions:
2/112122232
1122
2/112232
1122
1122
2/1000130
ba
ba
ba
.
Resolent el sistema obtenim a = –1 i b = 3.
c) Per a a = 1 i b = 0 diagonalitzeu la matriu A.
2/100010301
A .
Vaps 1 = 1 amb multiplicitat m1 = 2.
2 = 1/2 amb multiplicitat m2 = 1. Per trobar els veps de vap 1 = 1 busquem ker(f – I):
002/10003
000
12/10001103011
zyyxx
z
z
zyx
.
ker(f – I) = (1, 0, 0), (0, 1, 0).
Per trobar els veps de vap 1 = 1/2 busquem ker(f – 1/2I):
zzy
zxy
zx
zyx
06
0002/1
032/1
000
2/12/10002/110302/11
.
ker(f – 1/2I) = (–6, 0, 1).
2100010001
D
100010601
P .
d) Siguin

219
n
n
n
n
zyx
v
2/100010301
A
111
0v
00321 ............... vAAvAAAAAAAvAAvAvv n
nnnn . Volem trobar el valor de vn quan n , 0vALimvLim n
nnn .
Hem de calcular 1 PPDA nn on:
2100010001
D ,
100010601
P ,
100010601
1P ,
000010601
100010601
000010001
100010601
100010601
)2/1(00010001
100010601
n
n
n
n
n
nLimALim
017
111
000010601
0vALimvLim n
nnn.
Problema R.2
a) Estudieu la diagonabilitat de l'endomorfisme que té per matriu associada en base canònica:
2000031
baA .
b) Sigui f un endomorfisme amb matriu associada en base canònica:
200120311
F .
Justifiqueu quina o quines de les següents matrius segur que no estan associades a aquest endomorfisme f.

220
200320011
200320013
200010322
DCB .
SOLUCIÓ:
a) )2)()(1()( ap .
diferents.són sVAP' els totsperquè zablediagonalit És 21 Si aia Si a = 1:
1) VAP delitat (multiplic 21)(3)}({
2)·1( 10000030
)·1(
IArangIAKerDim
bIArangb
IA
.
Per tant, si a = 1 no diagonalitza, sigui quin sigui el valor de b.
Si a = 2:
2 VAP deltat multiplici degrau 12I)-dimKer(A 22I)-rang(A 0b Si2 VAP deltat multiplici degrau 22I)-dimKer(A 12I)-rang(A 0b Si
031-
b. dedepen )2( 00000031
)2(
b
bIArang
bIA
.
Per tant,
zadiagonalit No 0b i 2a Sizadiagonalit Sí 0b i 2a Si
.
b) Les matrius C i D segur que no estan associades a l'endomorfisme f perquè el seu
polinomi característic no coincideix amb el de la matriu F (recordem que el polinomi característic no depèn de les bases en les quals estigui expressada la matriu de l'endomorfisme).
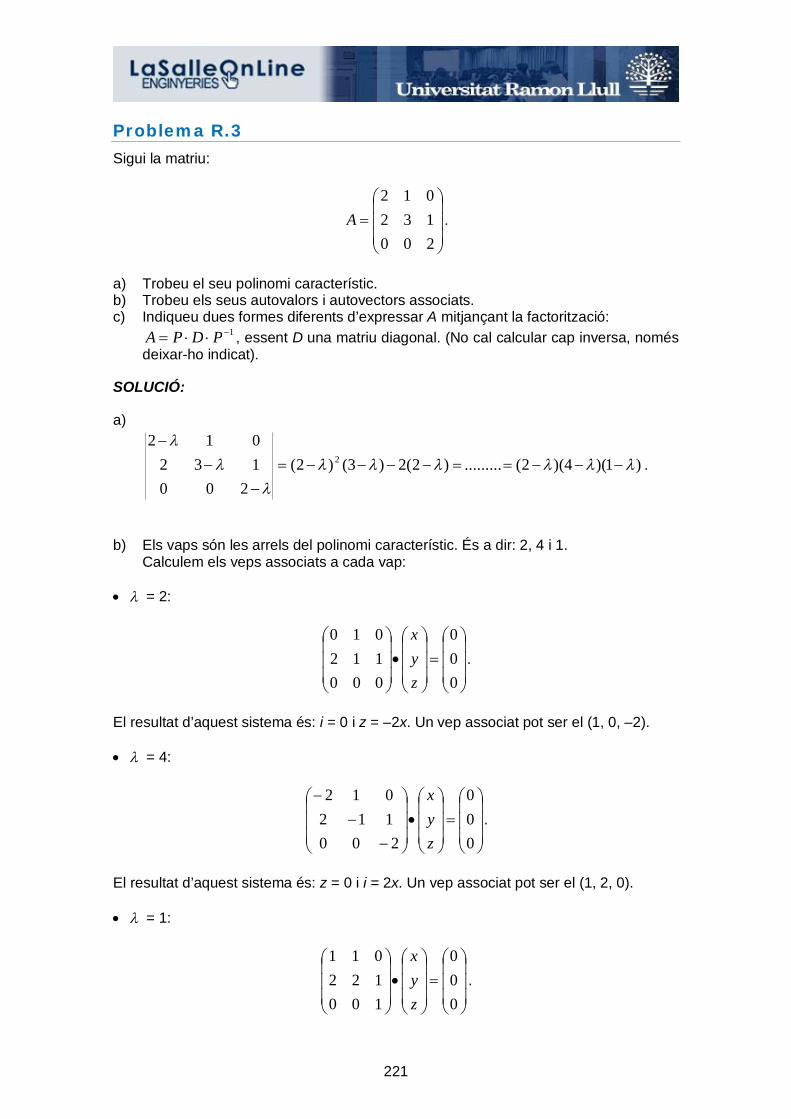
221
Problema R.3
Sigui la matriu:
200132012
A .
a) Trobeu el seu polinomi característic. b) Trobeu els seus autovalors i autovectors associats. c) Indiqueu dues formes diferents d’expressar A mitjançant la factorització:
1 PDPA , essent D una matriu diagonal. (No cal calcular cap inversa, només deixar-ho indicat).
SOLUCIÓ:
a)
)1)(4)(2(.........)2(2)3()2(200
132012
2
.
b) Els vaps són les arrels del polinomi característic. És a dir: 2, 4 i 1.
Calculem els veps associats a cada vap: = 2:
000
000112010
zyx
.
El resultat d’aquest sistema és: i = 0 i z = –2x. Un vep associat pot ser el (1, 0, –2). = 4:
000
200112012
zyx
.
El resultat d’aquest sistema és: z = 0 i i = 2x. Un vep associat pot ser el (1, 2, 0). = 1:
000
100122011
zyx
.

222
El resultat d’aquest sistema és: z = 0 i i = –x. Un vep associat pot ser el (1, –1, 0). c)
1
002120
111
100040002
002120
111
A .
Si canviem d’ordre els vaps en la matriu diagonal, haurem de fer també el canvi de columnes corresponent en la matriu de veps. Per exemple:
1
002210111
400010002
002210111
A .
Problema R.4
Sigui 33: f un endomorfisme:.
),432,423()(),,( zyxzyxzyxvfzyxv
.
Trobeu una base },,{ 321 vvvB de 3 en la qual la matriu associada a f sigui:
100030001
D .
SOLUCIÓ:
33: f endomorfisme.
),432,423()(),,( zyxzyxzyxvfzyxv
. Busquem la matriu associada a f en base canònica FCC:
123001 f , 132010 f , 144100 f
111432423
CCF .

223
Busquem una base },,{ 321 vvvB
en la qual la matriu associada a f sigui diagonal:
100030001
D ,
és a dir, busquem una base de veps de vaps 1 i 3. Veps de vap 1 = 1 amb multiplicitat m1 = 2. Busquem ker(f – 1I):
102)011()2()(2000
211422422
zyzyzyzyxzyxzyx
.
ker(f – 1I) = 102,011 . Veps de vap 2 = 3 amb multiplicitat m2 = 1. Busquem ker(f – 3I):
1222222
000
411402420
zzzzzyxzxzy
zyx
.
ker(f – 3I) = 122 .
La base de veps, tenint en compte l’ordre en què estan col·locats els vaps a la diagonal, és:
}102,122,011{ 321 vvvB .
Problema R.5
Sigui xPxPf 22: un endomorfisme amb matriu associada en base canònica:
10100
bb
baA .
a) Estudieu la diagonabilitat de l'endomorfisme f en funció dels paràmetres a i b.

224
Per a 0a i 1b resoleu els següents apartats: b) Trobeu una base de veps de xP2 (no deixeu el resultat en components). c) Trobeu les matrius D (diagonal) i P (regular) tals que APPD 1 . d) A partir dels resultats obtinguts als apartats anteriors i sense fer càlculs
addicionals trobeu una base de ker(f) (no deixeu el resultat en components).
NOTA: feu tots els càlculs i no deixeu el producte de matrius indicat.
SOLUCIÓ:
a)
211
0100
xxaxbb
xbxa
xIA
.
vaps: 1 = a, 2 = 1, m2 = 2. Si a = 1, 1 = 1, m1 = 3.
000001
bb
baIA .
Si b 0, rang(A – I) = 2, dim(ker(A – I)) = 1 3. No diagonalitzable. Si b = 0, la matriu ja seria diagonal amb 1 = 1 i m1 = 3.
Si a 1, 1 = a, 2 = 1 amb m2 = 2.
000001
bb
baIA .
Si b 0, rang(A – I) = 1, dim(ker(A – I)) = 2 = m2. Diagonalitzable.
Si b = 0, 011 2
)ba(bbbab
bbba
1ba0b-1-a .
Si a = b + 1, dim Im(A – I) = rang(A – I) = 1. dim ker(A – I) = 2. Diagonalitzable.
Si a b + 1. No diagonalitzable.

225
És a dir: Si b = 0, a. Diagonalitzable. Si b 0.
Si b = a – 1. Diagonalitzable. Si b a – 1. No diagonalitzable.
b)
111010010
A .
1 = 0, m1 = 1. 2 = 1, m2 = 2. 1 = 0:
cabcba
b
cba
0
00
000
011010010
20 axaa,,aVEP
c .
2 = 1:
bacccc
ba
cba
0
000
011000011
2cxbxbc,b,bVEP
c .
Base de veps = 22 11 x,x,x . c)
1010100
100010000 1-1
P D .
d) Base ker(f), vep associat a 1 = 0.
Base ker(f) = (1 + x2).

226
Problema R.6
Siguin f i g dos endomorfismes de 3. )0,0,1(,)1,0,1(,)1,1,1(1 B base de 3.
Matriu associada a f en base canònica:
4001031
a
aFCC .
Matriu associada a g en base B1:
300010003
11G .
a) Vaps i subespai de veps associat a cada vap de l’endomorfisme g. b) Per a quins valors del paràmetre a l’endomorfisme f és diagonalitzable?
Per a 3a resoleu els apartats següents: c) Trobeu una base 2B de veps de f . d) Matriu 22F associada a f en la base 2B de l’apartat anterior. e) Matriu 11F associada a f en la base 1B . Què podem dir de la base 1B ?
SOLUCIÓ:
a) Primera forma Directament. La matriu associada ja és diagonal, per tant, –1 (multiplicitat 1) i 3 (multiplicitat 2) són els vaps de l’endomorfisme g i els veps seran:
11111 )0,0,1()1,0,1()1,1,1(300010003
BBB gggG
.
La base de veps és la base )0,0,1(,)1,0,1(,)1,1,1(1 B .
Segona forma:
.
Vaps: 3 amb multiplicitat 2. –1 amb multiplicitat 1. Veps associats al vap 3: ker(f – 3 Id)

227
Una base del subespai de veps de vap 3, expressats en la base B1 serà {(1, 0, 0), (0, 0, 1)}, que en la base canònica correspondrà als veps {(1, 1, –1), (–1, 0, 0)}. Veps associats al vap 1: ker(f – Id):
Una base del subespai de veps de vap 1, expressats en la base B1 serà {(0, 1, 0)}, que en la base canònica correspondrà als veps {(1, 0, 1)}. b) Busquem el polinomi característic:
. L’endomorfisme serà diagonalitzable si la dimensió del subespai de veps de vectors de vap 1 coincideix amb la multiplicitat del vap 1, que és 2. Altrament dit, l’endomorfisme serà diagonalitzable si el rang de (F – Id) és 1:
c)

228
(1,0,1)}(0,-1,1),{(1,0,0), : vepsde base
)},0,{(,0000
030030333
4Id)-ker(f :4 vapde veps
)},,{(000
330000330
Id)-ker(f :1 vapde veps
)4()1()( 2
xxzxyzyx
zzxzyzyx
xxxp
.
d)
veps.de base (1,0,1)},(0,-1,1),{(1,0,0), B2
400010001
22F .
e)
)0,0,1(,)1,0,1(,)1,1,1(1 B . (1,0,1)} , (0,-1,1) , {(1,0,0) B2 .
100040001
010001101
400010001
011100010
12222111 MFMF .
La base B1 és una base de veps associats als vaps 1, 4, 1 respectivament.

229
Problema R.7
Sigui f un endomorfisme sobre 3R , amb matriu associada en base canònica:
1111
32
bc
aA .
Coneixem 321 ,, vvvB base de veps, amb 14,1,111 v , 1,1,12 v i 3v
desconegut. El vap associat al vep 1,1,12 v és 32 . a) Calculeu els paràmetres a, b, i c de la matriu A. b) Calculeu el vap associat al vep 14,1,111 v , sense calcular el polinomi
característic. c) Trobeu el vep 3v que falta. d) Trobeu la matriu associada a l’endomorfisme en base B d’origen i destí.
SOLUCIÓ:
a) Sabent que 2v és un vep de vap 32 , llavors s’ha de complir que:
333
111
·11
1132
·· 222
bc
avvA
.
D’aquesta expressió podem treure el següent sistema:
132
311311332
cb
a
bc
a
.
b) Sabent els coeficients a, b i c de la matriu A, i sabent que s’ha de complir
111 ·· vvA
, podem calcular el producte de la banda dreta de la igualtat i després trobar el vap associat.
282
22
141
11·
131111322
.
Per tant, el vap 1 és –2. c) Per trobar el vep que falta i el seu vap associat, podem calcular el polinomi
característic (hi ha altres solucions):

230
652131111322
23
xxxx
xx
xp .
Si busquem les arrels d’aquest polinomi trobarem que són
12
3
.
Com que 3 i –2 són els vaps que hem trobat anteriorment, el vap que ens falta és 1
13 . Operant de la mateixa manera que als apartats anteriors, s’ha de verificar que
333 ·· vvA
, per tant:
zyx
zyx
·131
111322
,
on x, i, i z són les components del vector. Resolent el sistema:
zzyxyzyx
xzyx
3
322,
obtenim
111
zy
x
.
Per tant 1113 v
. d) Com que la base B és una base de veps, la matriu associada a l’endomorfisme en
aquesta base és directament una matriu diagonal, formada pels vaps que hem trobat, llavors:
100030002
D .

231
Problema R.8
Suposem que existeixen tres empreses A, B i C que es reparteixen la totalitat dels clients en un determinat sector. Sabem que al final d’un període d’estudi (per exemple, un any) cada empresa perd alguns clients, però en guanya d’altres que han abandonat les seves empreses competidores, i sabem també que aquestes transicions es mantenen constants al final de cada període. Aquestes dades conegudes són les següents: L’empresa A manté al final del període el 70% dels seus clients, però el 20% marxa a l’empresa B i el 10% restant marxa a la C. L’empresa B manté al final del període el 80% dels seus clients, però el 10% marxa a l’empresa A i l’altre 10% marxa a la C. L’empresa C manté el 50% dels seus clients, però el 20% marxa a l’empresa A i el 30 marxa a la B. L’estat actual del mercat ve determinat pel vector (0,8 0,1 0,1) (que vol dir que el 80% dels clients els té l’empresa A, el 10% la B i l’altre 10% la C). a) Quina és la matriu que ens permet conèixer l’estat del mercat del període següent
si coneixem l’estat del període actual? Poseu les dades en tant per u. b) Expliqueu com calcularíeu d’una manera eficient l’estat del mercat després de 500
períodes. c) Com podem calcular l’estat estable del mercat? (És a dir, l’estat que ja no variarà
encara que al final de cada període es continuïn produint les transicions indicades).
SOLUCIÓ:
a)
5,01,01,03,08,02,02,01,07,0
M .
Així, amb aquesta matriu podem calcular l’estat següent del mercat si coneixem l’estat anterior. Per exemple, si l’estat inicial és: (a0, b0, c0), podrem calcular l’estat (a1, b1, c1) de la següent forma:
1
1
1
0
0
0
5,01,01,03,08,02,02,01,07,0
cba
cba
.
Veiem com l’empresa A tindrà el 70% dels clients que tenia anteriorment, més el 10% dels que tenia l’empresa B i el 20% dels que tenia la C. Per a l’empresa B i la C farem la mateixa interpretació del càlcul realitzat. b) Com ja hem vist a l’apartat anterior, per calcular l’estat següent hem de multiplicar
la matriu M per l’estat actual. Així:

232
0500
500
02
012
01
....xMx
xMxMMxMxxMx
.
Si diagonalitzem la matriu M, el càlcul es farà amb menys operacions:
01500
05001
0500
500
1
)( xPDPxPDPxMxPDPM
.
On la matriu D és la matriu diagonal formada pels vaps i la matriu P és la matriu formada pels veps associats. Per calcular D500 només hem d’elevar a 500 els vaps de la diagonal. c) Si no varia l’estat vol dir el següent:
És a dir, el vector estable és un vep de vap 1. Per tant, podem calcular els vaps i trobar el vep associat al vap 1 que compleixi que la suma de les seves components doni 1 (ja que la suma de clients ha de ser el 100%).
Un altre possible plantejament pot ser el següent:
01
lim
xPAPx
AD n
n
.
És a dir, calcular l’estat del mercat quan n tendeix a infinit.
Problema R.9
a) Sigui 33: f un endomorfisme i sigui:
201001
aabA on ba, .
Estudieu la diagonabilitat de f en funció dels paràmetres a i b. b) Sigui un altre endomorfisme:
ESTEST xMx

233
)233,2,(),,(),,(: 33
zyxyxxzyxgzyxg
.
Sabem que
110101001
P
és la matriu tal que 1 PDPA . Trobeu els vaps de l’endomorfisme g.
SOLUCIÓ:
a) Calculem els vaps de f calculant les arrels del polinomi característic:
0)2)()(1(2
01001
)(
xxbxxaa
xbx
xp .
Per tant, els vaps són 2,,1 321 b . Si 1b i 2b diagonalitza, ja que tenim tres vaps diferents (i la dimensió de
3 és 3).
Si 1b tenim:
2011001
aaA i els vaps són
21
2
1
amb
12
2
1
mm
.
Per tant, per afirmar que diagonalitza cal comprovar que:
2
1
)2(dim)(dim
mIfKermIfKer
1
3
21231001000
3)(3)Im(dimdim)(dim
maa
rgIArangIfIfKer
,

234
ja que 0101
a per a qualsevol valor de a.
No diagonalitza.
Si 2b tenim:
2021001
aaA i els vaps són
21
2
1
amb
21
2
1
mm
.
Per tant, per afirmar que diagonalitza cal comprovar que:
2
1
)2(dim)(dim
mIfKermIfKer
0001001
3)2(3)2Im(dimdim)2(dim 3
aargIArangIfIfKer .
Si estudiem el rang de A – 2I veiem que:
rang(A – 2I) = 2 si 0a , ja que aleshores 001
aa;
rang(A – 2I) = 1 si 0a , ja que aleshores:
000001001
2IA no té cap menor 2x2 diferent de 0.
Per tant,
2
2
2132123
)2(dimm
mIfKer si
00
aa
.

235
Per tant, per a 0a f no diagonalitza i per a 0a cal comprovar:
13 123
100011000
3)(3)Im(dimdim)(dim mrgIArangIfIfKer
.
Per tant, diagonalitza. Si fem un quadre resum tenim
b a 1b i 2b a diagonalitza
1b a no diagonalitza
2b 0a no diagonalitza 0a diagonalitza
b) Podem trobar els vaps de dues formes diferents: 1a forma: usant la definició de vap i de vep, sabent que les columnes de la matriu P són els veps de l’endomorfisme:
)0,1,1()0,1,1()0,1,1( 1 g 11 ,
)1,0,0()2,0,0()1,0,0( 2g 22 ,
)1,1,0()1,1,0()1,1,0( 3g 13 . 2a forma: calculant la matriu associada a g amb bases canòniques de sortida i d’arribada, i calculant els vaps, calculant les arrels del polinomi característic:
)3,2,1()3,2,1()0,0,1( CCg ,
)3,1,0()3,1,0()0,1,0( CCg ,
)2,0,0()2,0,0()1,0,0( CCg . Aleshores la matriu associada a g amb bases canòniques de sortida i arribada és:
233012001
A .
Si calculem el polinomi característic:
0)2)(1)(1(233
012001
)(
xxxx
xx
xp ,

236
els vaps són 2,1,1 321 .
RESUM S’ha presentat un conjunt d’exercicis resolts que il·lustren els conceptes explicats a les sessions anteriors.

237
SESSIÓ 26: Problemes proposats
FITXA DE LA SESSIÓ Nom: Problemes proposats Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la darrera sessió s’ha presentat una sèrie de problemes resolts pas a pas.
OBJECTIUS Proposar un recull de problemes per posar en pràctica els coneixements assolits a les sessions anteriors.
CONTINGUTS Aquesta sessió presenta un recull de problemes per posar en pràctica els coneixements assolits a les sessions anteriors.
5.10.2. Problemes proposats
Problema P.1
Sigui
A
1 42 3
.
Trobeu: a) Tots els vaps de A i els seus veps corresponents. b) Una matriu invertible P tal que D = P -1 A P sigui una matriu diagonal. c) A5. d) f(A), essent f(t) = t4 – 3t3 – 7t2 + 6t – 15.

238
SOLUCIÓ:
a) 1 = 5, v1 1 1 ; 2 = –1, v2 2 1 .
b) P
1 21 1
.
c)
20831042208410415A .
d) f(A) = 14 7638 52
.
Problema P.2
Donada la matriu
C
5 11 3
.
Trobeu els autovalors de C i un conjunt amb el màxim nombre d’autovectors linealment independents. És C diagonalitzable? Per què?
SOLUCIÓ:
Existeix un únic autovalor = 4 amb multiplicitat m = 2 que té associat un únic autovalor linealment independent v 1 1 , per tant, com que no és possible disposar d’una base d’autovectors de 2, C no és diagonalitzable.
Problema P.3
Sigui
B
3 1 17 5 16 6 2
.

239
Trobeu: a) El polinomi característic de B i les seves arrels (o autovalors de B). b) Un conjunt amb el major nombre d’autovectors linealment independents. c) És B diagonalitzable? En cas afirmatiu trobeu la matriu de canvi de base P que
permet expressar D = P -1BP com una matriu diagonal.
SOLUCIÓ:
a) p() = 3 – 12 – 16; 1 = –2 (m1 = 2), 2 = 4 (m2 = 1). b) 1 v1 1 1 0 ; 2 v2 0 1 1 . c) B no és diagonalitzable, ja que només podem trobar 2 autovectors linealment
independents. (<3 = dim 3).
Problema P.4
Sigui
A
1 12 1
una matriu definida sobre el cos dels reals. a) Trobeu els vaps i els veps de A. És A diagonalitzable? Per què? b) Repetiu l’apartat anterior considerant A definida sobre el cos dels complexes.
Trobeu la matriu regular P que verifiqui que P -1 AP és una matriu diagonal.
SOLUCIÓ:
a) No és diagonalitzable, ja que p() no té arrels reals. b) Sí que ho és, ja que: 1 = i v i1 1 1 ; 2 = –i v i2 1 1 i ( v v1 2, ) és base de C2 sobre C.

240
Problema P.5
Estudieu la diagonabilitat de l’endomorfisme f de 3 en 3 que té per matriu associada en base canònica:
A4 0 20 1 05 1 3
.
SOLUCIÓ: 1 = 1 (m1 = 2), però el rang(A – 1I) 1, dim ker(f – 1I) 2, per tant l’endomorfisme f no és diagonalitzable.
Problema P.6
Sigui A una matriu 2-quadrada simètrica definida sobre el cos dels reals. Demostreu que A és diagonalitzable.
Problema P.7
Sigui
A
2 21 3
.
Trobeu: a) Tots els autovalors de A i un conjunt màxim d’autovectors linealment
independents. b) Una matriu no singular P que verifiqui que D = P -1 AP és diagonal. c) A6. d) Una arrel quadrada positiva de A, és a dir, una matriu B amb autovalors no
negatius que verifiquin que B2 = A. SOLUCIÓ: a) 1 = 1 v1 2 1 ; 2 = 4 v2 1 1 .
b) P
2 11 1
.

241
c) A6 1366 27301365 2731
.
d) B
4 3 2 31 3 5 3
/ // /
.
Problema P.8
Sigui
A
4 1 12 5 21 1 2
.
Calculeu: a) El polinomi característic de A. b) Els vaps de A i les multiplicitats associades a cadascun. c) Un conjunt màxim de veps linealment independents de A. d) És A diagonalitzable? En cas afirmatiu, trobeu una matriu P regular que verifiqui
que la matriu P -1 AP és diagonal.
SOLUCIÓ:
a) p() = 3 – 112 + 39 – 45. b) 1 = 3, m1 = 2; 2 = 5, m2 = 1. c) 1 1 0 1 0 1 1 2 1 , , és una base de veps de A. d) A sí que és diagonalitzable, ja que existeix una base de 3 en la qual la matriu
associada a l’endomorfisme que representa és diagonal:
P i P AP
1 1 11 0 2
0 1 1
3 0 00 3 00 0 5
1 .

242
Problema P.9
Sigui
10
11A .
Trobeu A2, A3 i An utilitzant la diagonalització. SOLUCIÓ:
A A An
n
n
2 31 00 1
1 10 1
1 1 12
0 1
( )
( ).
Problema P.10 Aquest problema s’ha de lliurar
Sigui un endomorfisme f definit en l’espai vectorial P2(x) (polinomis de grau menor o igual que 2) sobre R, del qual coneixem la matriu associada en base canònica B = (1, x, x2), tant de sortida com d’arribada:
110110
1 baA .
On a i b són paràmetres reals. a) Discutiu la diagonabilitat de en funció dels paràmetres a i b, i feu un resum en
una taula. b) Calculeu, per als valors de a = 0 i b = –1, una base de polinomis que compleixin la
condició f(p(x)) = λp(x), on λ és una constant, i calculeu també el valor de la constant λ per a cada polinomi de la base.
Suposeu, a partir d’ara, els valors de a = 2 i b = 1. c) Calculeu les imatges segons l’aplicació dels polinomis següents:
{v1(x), v2(x), v3(x)} = {1, x + x2, – 1 – x + x2}.
I proposeu, a partir del resultat, dues formes alternatives de descompondre la matriu A segons la següent expressió: A = PDP-1, on D és una matriu diagonal i és una matriu no singular.
NOTA: no cal calcular la inversa de P, només cal que deixeu el resultat indicat.

243
d) Calculeu una base i la dimensió tant del nucli com de la imatge de f. Podeu
relacionar el resultat obtingut amb l’apartat anterior?
RESUM En aquesta sessió s’ha proposat un recull de problemes per posar en pràctica els coneixements assolits a les sessions anteriors.

244

245
SESSIÓ 27: Exercici de modelització
FITXA DE LA SESSIÓ Nom: Exercici de modelització Tipus: problemes Format: no presencial Durada: 10 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Posar en pràctica el concepte de diagonalització en un problema extret del món real.
CONTINGUTS En aquesta sessió els alumnes hauran d’enfrontar-se a un exercici extret del món real, que hauran de resoldre utilitzant les eines algebraiques estudiades a les sessions anteriors. Per a això es generaran grups de treball formats per tres alumnes. L’enunciat i el contingut dels informes a presentar es detallarà en un fitxer apart.
5.11. Exercici de modelització
5.11.1 Enunciat
El zoo de Barcelona s’ha proposat construir un mòdul nou en el qual una espècie d’au provinent de l’Àfrica central pugui desenvolupar-se i créixer. Després de dos anys d’estudi, els experts del zoo que analitzen el comportament i l’evolució dels exemplars inicials han pres nombroses dades associades a la mortalitat i a la natalitat de l’espècie. Els experts han generat un informe, del qual podem extreure les següents dades: S’ha dividit la població en tres classes o subgrups, segons la seva edat: joves (fins a
1 any), subadults (entre 1 i 2 anys) i adults (més de 2 anys). La població és controlada en intervals de duració anual (la comptabilitzen d’any en any).
Es determina que, al final de cada període anual, el 18% dels joves arriba a l’edat
subadulta, el 71% dels subadults arriba a l’edat adulta i el 94% dels adults sobreviu al següent any. Per altra banda, troben que la taxa de fecunditat dels adults (que són l’únic subgrup amb capacitat per tindre cries) és del 33% (el 33% dels adults té una cria; o dit d’una altra forma, es té 1 cria nova per cada 3 adults cada any).

246
L’objectiu de l’estudi és esbrinar si, mantenint les condicions de l’ecosistema artificial generat en aquest mòdul del zoo, l’espècie creixerà o s’extingirà després d’un temps. És a dir, es planteja la realització de l’estudi que ens permetrà determinar l’evolució de la població a llarg termini.
5.11.2. Qüestions orientatives i per reflexionar 1) Indiqueu les equacions que permeten conèixer les poblacions de cada subgrup al
final de cada any. 2) Modeleu matricialment l’evolució de la població. 3) Com ens permet l’anàlisi de la matriu anterior respondre la pregunta objectiu? 4) Quines condicions hauria de complir la matriu obtinguda a la pregunta 2 per poder
afirmar que l’espècie: a. S’extingeix. b. Es manté amb el mateix nombre d’individus. c. S’incrementa el nombre d’individus.
5) Si les dades de l’estudi fossin les que apareixen a continuació, les perspectives de
supervivència de l’espècie serien millors que amb les dades inicials? Justifiqueu clarament la vostra resposta.
Supervivència d’exemplars joves 40% Supervivència d’exemplars subadults 60% Supervivència d’exemplars adults 80% Fecunditat d’exemplars subadults 20% Fecunditat d’exemplars adults 30%
5.11.3. Estructura i contingut de l’informe que ha de presentar-se
L’informe presentat ha de contenir els següents apartats:
Portada. Índex. Objectius perseguits amb la realització de l’exercici. Enunciat del problema. Resposta detallada a les cinc preguntes plantejades a l’enunciat, incloent-hi els
càlculs realitzats. Conclusions i comentaris.

247
5.11.4. Criteris que s’aplicaran en l’avaluació de l’informe presentat
Els conceptes que seran avaluats en l’informe i el mode en el qual seran avaluats es detallen a continuació.
Nivell de qualitat assolit Molt malament
(MM) Malament
(M) Regular
(R) Bé (B)
Molt bé (MB)
Estructura i organització
El format del document no s’adapta en absolut a l’establert. Hauria de
refer-se tot.
El format no
s’adapta, en la seva majoria, al format establert.
Existeixen dos o tres aspectes que
no s’ajusten al format. Amb retocs
simples podrien arreglar-se.
Existeix algun aspecte que no
s’ajusta al format, encara
que no és important.
El document s’ajusta
totalment al format establert.
Claredat de les explicacions
La major part del text
presenta frases
confuses. A vegades no és
possible entendre què
s’intenta expressar.
El text és molt difícil de
comprendre. La major part del text presenta
frases llargues i confuses. Exigeix
constantment de la relectura de
frases.
Apareixen varies frases confuses que obliguen el
lector a rellegir-les per tal de
comprendre-les.
En alguna ocasió puntual
el lector es perd en alguna frase llarga i confusa,
obligant-lo a rellegir-la dues o tres vegades per tal d’entendre-la.
Els continguts s’exposen amb molta claredat. Les frases són curtes i fàcils d’entendre.
Desenvolupament de les preguntes
proposades
No s’ha contestat
correctament cap de les preguntes
proposades.
Només s’ha desenvolupat
correctament 1 de les preguntes
proposades.
S’han desenvolupat correctament 2 o 3 de les preguntes
proposades.
S’han desenvolupat
correctament 4 de les preguntes
proposades.
Les 5 preguntes proposades
s’han desenvolupat i
contestat correctament.
Conclusions i comentaris
No té conclusions.
Comentaris molt simples i
mancants de contingut.
Les conclusions es centren
exclusivament en les respostes a les
preguntes proposades a
l’exercici, sense reflexionar sobre altres aspectes
importants.
Es mostra una valoració global
de l’exercici sense aprofundir
massa en l’objectiu perseguit.
Els comentaris mostren una
profunda reflexió sobre els
objectius de l’exercici, a més
d’una crítica constructiva.
RESUM En aquesta sessió s’ha proposat un exercici per posar en pràctica els conceptes estudiats a les sessions anteriors en el context d’un problema real.

248

249
SESSIÓ 28: Introducció a la descomposició en valors singulars (SVD, Singular Value Decomposition)
FITXA DE LA SESSIÓ Nom: Introducció a la descomposició en valors singulars (SVD, Singular Value
Decomposition) Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’ha presentat el concepte de diagonalització d’endomorfismes.
OBJECTIUS Estudiar el mètode de la descomposició en valors singulars per fer l’estudi d’autovalors i d’autovectors en un cas general de matrius no quadrades.
CONTINGUTS Aquesta sessió presenta els aspectes teòrics del mètode de la descomposició en valors singulars.
5.12. Descomposició en valors singulars (SVD)
5.12.1. Introducció En aquest apartat veurem com factoritzar una matriu A com un producte de 3 matrius. Aquesta descomposició rep el nom de descomposició en valors singulars (SVD) i es pot entendre com la generalització de l’anàlisi d’autovalors i d’autovectors per a matrius no quadrades.
TVUA ·· .

250
D’aquesta nova descomposició veurem una primera explicació, sense entrar en detalls. Per a aquells que vulguin aprofundir en el tema recomanen mirar la bibliografia (Capítol 7 de Mathematical Methods and Algorithms for Signal Processing. Todd K. Moon & Winn C. Stirling. Prentice Hall). La diferència principal amb la diagonalització d’endomorfismes (que ens permet expressar la matriu associada com 1·· PDPA ) és que aquesta nova descomposició: Sempre existeix. És a dir, sempre serà possible factoritzar A d’aquesta forma. La matriu A pot tenir qualsevol dimensió (m x n).
En aquesta nova descomposició tenim: La matriu és una matriu de m x n, diagonal:
),,,( 21 rdiag on r és el mínim de m x n. La matriu U és una matriu de dimensions m x m. La matriu V és una matriu de dimensions n x n. Les matrius U i V són unitàries, és a dir:
IVVIUU
T
T
··
. Aquesta descomposició la podem veure com que troba una nova matriu associada a una aplicació f, que seria VUF , on V i U representen les bases origen i destí respectivament.
T
T
VUVUA
UVV
basedecanvi
fbasedecanvi
CUVCFFEE
1
1
.
Com es pot observar, ens hem agafat la llicència de anomenar V i U les matrius de canvi de base a l’espai origen i a l’espai destí respectivament.
5.12.2. Com es calculen les matrius U, Σ i V
. Si multipliquem per la dreta en (1) els dos membres de la igualtat per la matriu V:
. Si multipliquem per l’esquerra en (1) els dos membres de la igualtat per la matriu UT:
.

251
Fixem-nos en l’expressió (2):
. És a dir,
. Per tant, les columnes de V són els veps de (ATA). Fixem-nos ara en l’expressió (3):
. És a dir,
. Per tant, les columnes de U són els veps de (AAT) Per finalitzar aquest apartat, podem dir també que els valors singulars de la matriu Σ són les arrels quadrades dels vaps de la matriu AAT (o els de la matriu ATA, ja que els vaps d’aquestes matrius coincideixen).
RESUM En aquesta sessió s’han presentat els aspectes teòrics del mètode de la SVD.

252

253
SESSIÓ 29: Interpretació i aplicacions de la SVD
FITXA DE LA SESSIÓ Nom: Interpretació i aplicacions de la SVD Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior s’han presentat els aspectes teòrics del càlcul de la SVD.
OBJECTIUS Saber interpretar el resultat de la SVD i entendre les seves aplicacions.
CONTINGUTS En aquesta sessió es detalla la interpretació de la SVD i s’expliquen algunes de les seves aplicacions. Finalment es presenta un exemple numèric.
5.12.3. Interpretació i aplicacions de la SVD
Sigui el producte de dues matrius de dimensions adequades, la columna -èsima de la matriu es pot expressar com , on és la columna -èsima de la matriu . Interpretant com la matriu associada a una aplicació lineal , aleshores , és a dir, les columnes de
pertanyen al subespai engendrat per les columnes de , i la columna -èsima de la matriu són els coeficients de referits a la base de formada pels vectors
. Per tant, podem dir que el subespai columna de engendra el subespai columna de , el qual indiquem com (noteu que si és una matriu nul·la aleshores ).
Una de les aplicacions més interessants que ofereix la SVD és la reducció de rang de dades amb mínima pèrdua d’informació rellevant. Com a exemple il·lustratiu, es pot aplicar a la codificació eficient d’imatges, on podem expressar una col·lecció de n imatges amb una matriu d’imatges de definida com:
254
On cada imatge de la col·lecció (amb resolució de píxels) representa una columna de la matriu (p. ex. posant totes les columnes de cada imatge concatenades en una única columna).
Escrivim la descomposició de la matriu d’imatges anterior amb la SVD amb l’equació
, on , i . Observem que, segons el que s’ha comentat anteriorment, les columnes de la matriu formen una base de representació de totes les imatges de la col·lecció. D’altra banda, la columna -èsima de la matriu són les components de la imatge -èsima respecte d’aquesta base de vectors columna de .
La base de vectors columna de la matriu forma una base òptima per compactar
les dades de la matriu d’imatges. El mètode de reducció a rang de la matriu a partir de la SVD es basa en escollir els vectors propis (columnes de ) associats als valors singulars majors de la matriu , és a dir:
.
On és la submatriu de la matriu que conté els seus valors singulars majors, és la submatriu de la matriu formada per les seves columnes associades a aquests valors singulars, i és la submatriu de la matriu formada per les seves columnes associades també a aquests valors singulars.
Observem que, assumint el cas que i que la informació dels coeficients respecte de la base de s’emmagatzema en la matriu , el mètode reduirà informació sempre que .
D’aquesta forma, ens quedem amb la informació de rang que millor representa la informació original, obtenint un error de reconstrucció menor que qualsevol altre mètode d’aproximació lineal alternatiu. La capacitat de compactació del mètode (habilitat per trobar un valor de prou petit tot assegurant un error de reconstrucció) depèn de la naturalesa de les dades que formen la matriu original . En el cas de l’aplicació de codificació d’imatges, per exemple, és preferible que la matriu estigui formada per cares amb la mateixa escala i centre de gravetat que no per imatges de cares de diferents grandàries i posicions (major similitud de les dades major capacitat de compactació).
En general, l’aplicació de la reducció de rang de dades s’engloba en el que es coneix com l’anàlisi de components principals (PCA, Principal Component Analisis). No obstant això, existeixen altres aplicacions no menys interessants que la SVD, com és el cas de la inversió robusta per solucionar sistemes d’equacions incompatibles o sobredeterminats (cerca de la solució compatible més propera a la desitjada), o bé per a sistemes d’equacions compatibles indeterminats o subdeterminats (cerca de la solució de mínima longitud o norma), per mitjà del que es coneix com la matriu pseudoinversa notada com .

255
5.12.4. Exemple numèric
. Observem com , i d’altra banda
, per tant tots els vectors columna de que són iguals a
es poden expressar com .
En aquest cas, tenim dos valors singulars i , per tant, escollim i podem expressar (de forma exacta i no aproximada) la matriu original quedant-nos només amb la primera columna de les matrius i , i la submatriu de de , és a dir:
.
RESUM En aquesta sessió s’ha presentat una interpretació del resultat de la SVD i s’han detallat algunes aplicacions d’aquest mètode. També s’ha mostrat un exemple numèric. Al final del curs es plantejarà un nou exercici de modelització en el qual s’aplicarà aquest concepte en un problema tècnic.

256

257
SESSIÓ 30: Definició de producte escalar
FITXA DE LA SESSIÓ Nom: Definició de producte escalar Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Definir el concepte de producte escalar per a la posterior definició d’espai vectorial euclidià i d’espai vectorial unitari.
CONTINGUTS Definició i exemples del concepte de producte escalar i definicións d’espai vectorial euclidià i d’espai vectorial unitari.
6. Espais vectorials euclidians i unitaris
6.1. Producte escalar. Espai euclidià i espai unitari.
En aquest apartat s’estudia la definició de producte escalar i es mostren alguns exemples. Seguidament es defineixen els conceptes d’espai vectorial euclidià i d’espai vectorial unitari.
6.1.1. Definició de producte escalar Sigui E un espai vectorial sobre R (o C). El producte escalar és una aplicació del producte cartesià E x E sobre R (o C):
vuvuoCExE ,),()(
,

258
que verifica les següents propietats: Si E és un espai vectorial sobre el cos commutatiu dels reals:
o Bilineal
,,,, 2121 vvuu
2111211
1211121
,,,,,,vuvuvvuvuvuvuu
.
o Simètrica (commutativa)
uvvuvu
,,,
.
o Definida positiva
0,0
0,0:.
0,
uuu
uuusi
uuu
.
Convé remarcar que si es compleix la primera propietat de bilinealitat i la propietat simètrica, aleshores es compleix la propietat de linealitat.
Si E és un espai vectorial sobre el cos commutatiu dels complexos:
o Sesquilineal
cvvuu
,,,,
1
2121
21*
11*
21
1211121
,,, v,uv,,
vuvuvvuuvuu
.
o Hermítica
*,,,
uvvuvu
.
o Definida positiva

259
0,0
0,0:.
0,
uuu
uuusi
uuu
.
6.1.2. Altres propietats
Cal destacar també, addicionalment a les propietats anteriors, que es compleix:
EvKvuvu
uv
jji
S
jjiji
R
i
R
i
S
jjjii ,u i , ,, .2
00,,0 .1
i1
*
11 1
.
6.1.3. Exemples
Exemple 1
Sigui n un espai vectorial sobre , on definim el producte escalar així:
),....,,( i ),....,,(
,},{
,
2121
1
nn
i
n
ii
nn
vvvvuuuuon
vuvuvu
x
.
Demostreu que és producte escalar ben definit.
SOLUCIÓ
S’han de complir tres propietats, en tant que l’espai vectorial està definit sobre el cos commutatiu dels reals: bilineal, simètrica i definida positiva. Bilineal
,,)()(.....)()(.....
)(.....)()(,,,,
1111
22221111
222111
vuvuvuvuvuvu
vuvuvuvuvuvu
nnnn
nnnn
nnn
.
La segona part es complirà si es compleix la simètrica.

260
Simètrica
nnnn uvuvuvvuvuvuuvvu
..........,,
22112211
.
Definida positiva
0
0.....,00,0:.
0,
2
222
21
sempreuperque
uuuuuuuuusi
uu
i
n
.
Exemple 2
Sigui V un espai vectorial de funcions reals de variable real sobre , que són continues en (a, b). Definim l’aplicació:
b
a
dxxgxfxgxf
VxV
)()()(),(.
Comproveu si és o no producte escalar.
SOLUCIÓ
S’han de complir tres propietats, en tant que l’espai vectorial està definit sobre el cos commutatiu dels reals: bilineal, simètrica i definida positiva. Bilineal
)()()()()()()()(
)()()()()()(
,,
)(,
)(),()(),()(),()(
xXXX
b
aXX
b
aXX
XXX
b
aXXX
hghfdxhgdxhf
dxhgfhgf
xhxgxhxfxhxgxf
.
Simètrica

261
b
a
b
a
xfxgdxxfxgdxxgxfxgxf
xfxgxgxfVxgxf
)(),()()()()()(),(
)(),()(),()(),(
.
Definida positiva
0
0)()()(),(0)(
0)(),(0)(:.
0)(),(
2
2
semprefperque
dxfdxxfxfxfxfxf
xfxfxfsi
xfxf
x
b
a
b
ax
.
Exemple 3
Sigui mxnM un espai vectorial de les matrius de m files i n columnes definit sobre R. Definim un producte escalar de la següent manera:
)Tr(BBA, BA,
T A
xMM mxnmxn
.
On Tr(C) és la suma dels elements de la diagonal de la matriu quadrada C. Comproveu si és o no producte escalar.
SOLUCIÓ
La traça és la suma dels elements de la diagonal d´una matriu.
nxnaa
aa
bb
bbAB
mn1m
n111
mnn1
1m11T
................
...............*
..............
.............* .
Buscarem l’expressió general del terme Cij de la matriu ABC T :
2m1m2221121112
1m1m2121111111
abababCabababC
..................
.
L’expressió general és
m
kkjki abCij
1
de cada element de C.

262
BAabCTraçan
i
m
kkiki
n
iii ,
1 11
.
S’han de complir tres propietats, en tant que l’espai vectorial està definit sobre el cos commutatiu dels reals: bilineal, simètrica i definida positiva.
Bilineal
mxnMCBA ,,
m
kkikiki
n
i
m
kkiki
n
ibacdcCDCBA
CBCACBA
1111)(,,
,,,
.
Podem aplicar la propietat distributiva:
m
k
m
kkiki
n
ikiki
n
i
CBCAbcac1 111
,,
CABACBA ,,, .
Quedarà demostrada si es compleix la propietat simètrica.
Simètrica
m
k
m
kkiki
n
ikiki
n
iABbaabBA
ABBA
1 111,,
,,
.
Definida positiva
0
0..00..0
00,
0,
2
1
2
1 11
ki
m
kki
m
k
n
ikiki
n
i
a
aaa
AAAsi
AA
.

263
Exemple 4
Sigui nC un espai vectorial sobre C. Definim una aplicació:
n
iii
nn
vuvuvu
CxCC
1
*,,
.
Demostreu que l'aplicació és un producte escalar.
SOLUCIÓ
S’han de complir tres propietats, en tant que l’espai vectorial està definit sobre el cos commutatiu dels complexos: sesqulineal, hermítica i definida positiva.
Sesquilineal
wuvu
wuvuwvuwvuwvub
wvwuwvwuwvuwvua
n
i
n
iiiii
n
i
n
iiiiiii
n
i
n
iiiii
n
iiii
,,
))()(()(, )
,,)(, )
**1 1
****
1 1
***
1 1
**
1
*
.
Hermítica
*
1
**
1
**
1
*
1
*
*
,)()(,
,,
uvuvuvuvvuvu
uvvun
iii
n
iii
n
iii
n
iii
.
Definida positiva
n
ii
n
iii uuuuu
1
2
1
* 0,
.
6.1.4. Espai vectorial euclidià i espai vectorial unitari
Sigui E un espai vectorial sobre en el qual hem definit un producte escalar:
x .
Aleshores, aquest espai vectorial es diu euclidià. Un espai vectorial unitari és un espai vectorial sobre C, en el qual hem definit un producte escalar.
Cx .

264
RESUM En aquesta sessió s’ha estudiat la definició del concepte de producte escalar i s’han vist alguns exemples. També s’han estudiat les definicions d’espai vectorial euclidià i d’espai vectorial unitari.

265
SESSIÓ 31: Conceptes de norma d’un vector i d’angle entre vectors
FITXA DE LA SESSIÓ Nom: Conceptes de norma d’un vector i d’angle entre vectors Tipus: teòrica Format: no presencial Duració: 5 hores Treball a entregar: no Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Estudiar els conceptes de norma d’un vector i d’angle entre dos vectors.
CONTINGUTS Definició de norma d’un vector, exemples i concepte de normalització. Definició d’angle entre vectors juntament amb un exemple.
6.2. Norma d’un vector
6.2.1. Definició
Sigui E un espai vectorial sobre (o C), que hem definit com una aplicació com la següent:
uu
E
}{
Perquè aquesta aplicació pugui ser considerada norma ha de complir 3 propietats:
a)
0
vEv
00
00
vvsi
vvsi
.

266
b)
vvEvk
.
c) Desigualtat triangular.
vuvuEvu
,
.
NOTA: en el cas de 2 o 3 s’anomena mòdul d’un vector.
6.2.2. Norma induïda a partir del producte escalar
Sigui E un espai vectorial sobre amb producte escalar definit, és a dir, E és un espai vectorial euclidià. Definim una aplicació com l’arrel positiva del producte escalar del vector amb ell mateix.
uuu
E , .
Aquesta aplicació s’anomena norma induïda pel producte escalar. Podem comprovar que és una norma perquè compleix les tres propietats requerides: a)
Ev
00
00
vvsi
vvsi
per la 3ª propietat del producte escalar.
0, vv
00, vvv
0,? vv
0 , vv
per la 3ª propietat del producte escalar en el cas: 0v 22 xM .

267
b)
vvvvvvvv ,,, 2
.
a)
.
Demostració de la desigualtat de Cauchy–Schwarz
DEMOSTRACIÓ 1:
vvuuvu
Evu
,,,
,2
.
Recordem:
vuvuvu
vuvu
n
iii
n
iii
,,
,
*
1
**
1
*
.
De la propietat definida positiva:
0,,,,,,,,,,,
0,
**
vvuvvuuuvvuvvuuuvuvvuuvuvu
vuvu

268
agafem per a el següent valor:
.
Substituint:
.
DEMOSTRACIÓ 2:
Volem veure que u v <u, v> . Veurem la següent desigualtat equivalent a l’anterior:
<u, u> <v, v> <u, v> 2.
Considerem <u + v , u + v > 0 (per a ser definida positiva). Per a la bilinealitat tenim:
<u + v, u + v> = <u, u> + 2 <u, v> + 2<v, v> 0. Podem entendre aquesta desigualtat com una equació de 2º grau:
c + 2b + a2 0. Es tracta d’una paràbola positiva, per tant, amb una arrel o cap. Per discutir l’existència d’arrels calculem el discriminant b2 – 4ac (el terme de dins de l’arrel en la resolució de l’equació de 2º grau). Sabem que la nostra paràbola té una sola arrel b2 – 4ac = 0; o cap arrel b2 – 4ac < 0. Per tant, 0 b2 – 4ac.

269
Tornant a l’equació tenim:
0 4 <u, v>2 – 4 <v, v> <u, u>. Simplifiquem i escrivim la desigualtat:
<v, v> <u, u> <u, v>2,
que és la que volíem veure.
6.2.3. Exemples de norma
Per a Rn o Cn espai vectorial sobre R o C, aquesta Tnxxxx ),...,,( 21
es defineixen les normes :
n
n
n
xxxmaxx
xxxx
xxxx
,...,
...
...
21
222
212
211
.
Per exemple:
3 14 ;6
)3,1,2(
21
3
xxx
xx
.
6.2.4. Normalització d’un vector respecte d’una norma donada
Normalitzar un vector x significa trobar un vector que apunti a la mateixa direcció que (combinació lineal de x ) i que tingui norma 1.
Sigui E un espai vectorial amb producte escalar definit, i sigui .x Direm que x és un vector unitari 1 x . Per a )( 0x
podem trobar un vector nx ( x normalitzat) unitari associat a .x
1xxxn
.
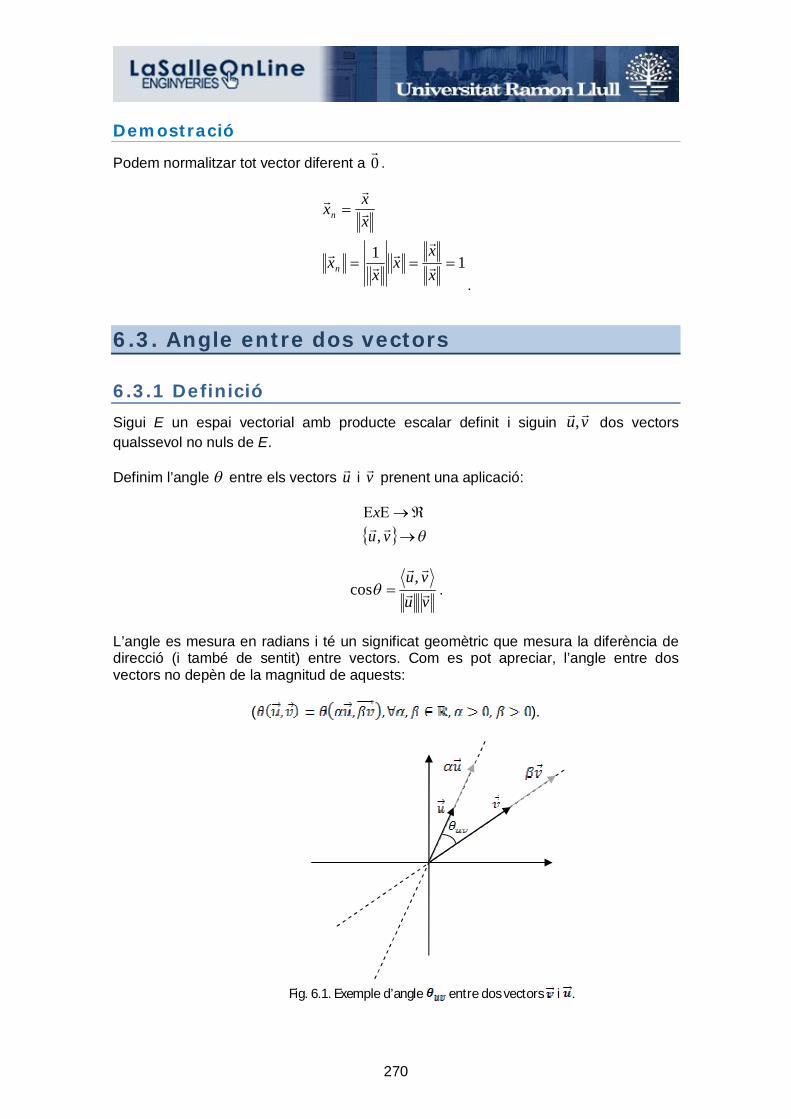
270
Demostració
Podem normalitzar tot vector diferent a 0
.
11
xx
xx
x
xxx
n
n
.
6.3. Angle entre dos vectors
6.3.1 Definició
Sigui E un espai vectorial amb producte escalar definit i siguin vu , dos vectors qualssevol no nuls de E. Definim l’angle entre els vectors u i v prenent una aplicació:
vux,
vuvu
,cos .
L’angle es mesura en radians i té un significat geomètric que mesura la diferència de direcció (i també de sentit) entre vectors. Com es pot apreciar, l’angle entre dos vectors no depèn de la magnitud de aquests:
( ).
Fig. 6.1. Exemple d’angle entre dos vectors i .

271
Segons la desigualtat de Cauchy-Schwarz, l’angle sempre existeix.
1cos1 1,
vuvu
.
6.3.2. Exemple Trobeu l’angle entre els dos vectors següents:
)1,2,1()3,0,2(
vu
de 3 .
SOLUCIÓ:
5,96136
1cos
1)1,2,1(),3,0,2(
1394)3,0,2(
6)1,2,1(
)1,2,1()3,0,2()1,2,1(),3,0,2(
cos
.
RESUM En aquesta sessió s’han presentat els conceptes de norma i de normalització d’un vector. També s’ha estudiat el concepte d’angle entre dos vectors.

272

273
SESSIÓ 32: Ortogonalitat i subespais ortogonals
FITXA DE LA SESSIÓ Nom: Ortogonalitat i subespais ortogonals Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’ha definit el concepte de producte escalar. A la darrera sessió, específicament, s’han detallat els conceptes de norma d’un vector i d’angle entre dos vectors.
OBJECTIUS Estudiar els conceptes d’ortogonalitat i subespais ortogonals, així com la relació entre ortogonalitat i independència lineal.
CONTINGUTS Aquesta sessió conté les definicions dels conceptes d’ortogonalitat i subespais ortogonals, i exercicis per il·lustrar-los.
6.4. Ortogonalitat i subespais ortogonals
6.4.1. Definició d’ortogonalitat
Dos vectors uv , són ortogonals (en es denominen perpendiculars) entre ells, si .0, vu
El 0
és ortogonal a tots els vectors.
L’angle entre dos vectors ortogonals és de 90º.
vuvu
,cos si v i u són ortogonals 0, vu
00cos vu

274
º90 .
Exemple
Trobeu un vector ),,( zyxw
ortogonal a: )4,1,0( i )5,3,1( vu aplicant el producte
escalar euclidià.
SOLUCIÓ
.
Els vectors amb la forma són y Posem per exemple .
6.4.2. Subespai ortogonal Sigui E un espai vectorial amb producte escalar definit i sigui S un subconjunt de E ( ES ). Definim el subespai ortogonal de S )( S de la forma següent:
SuvuvS 0,.
S és el conjunt format per tots els vectors de E que són ortogonals a tots els vectors
de S.
Propietats
1. S és un subespai vectorial de E.
Suu 21 ,,
Suu 21
.
1u i 2u pertanyen a S perquè Sv
, es compleix:

275
0,
0,
2
1
vu
vu
,
per tant,
0,,
0,
0
2
0
1
?
21
vuvu
vuu
.
2. SS
DEMOSTRACIÓ:
El subespai està format pels vectors que són ortogonals a tots els vectors que poden ser engendrats pels vectors de S, és a dir, vectors de la forma:
. On la combinació lineal és de tots els vectors que pertanyen a . LLavors,
, i com veiem, per bilinealitat del producte escalar, podem afirmar que . Per tant, tot vector que pertany a pertany també a . Com podem comprovar, a la inversa també es complirà, la qual cosa significa en definitiva que . Exemple geomètric en ℝ3: sigui un conjunt de 2 vectors no nuls i linealment independents Llavors:
Com es pot apreciar, el subespai forma una recta a l’espai que és ortogonal tant al conjunt de vectors de com al pla que engendren aquests dos .
Indica angle recte entre els dos vectors
Fig. 6.2. Exemple de subespai ortogonal a un conjunt de vectors i a l’espai que aquestos engendren.

276
3. 0
SS . La intersecció entre el subespai engendrat pels vectors de S i el subespai ortogonal a S és igual a 0.
Exemple 1
Trobeu el S al subconjunt S de 3 .
)4,1,0(),5,3,1( 21 uuS .
SOLUCIÓ:
zzzzvvS s ),4,7(.
Exemple 2
Trobeu S amb el producte escalar euclidià si:
)0,1,1(),0,0,1(
3
SE
.
SOLUCIÓ:
),,(
),,(),,,(
),,(),,,(),,(
z00S0yxtqxS
0xy0yx
0011zyx0x
0001zyxzyxS
3
.
Es pot comprovar que la intersecció entre S i S és el vector nul.

277
6.4.3. Altres definicions
Conjunt ortogonal
Si S on E és un espai vectorial amb producte escalar definit, direm que S és un conjunt ortogonal de vectors si cada parell de vectors ho són.
nuuuS ,......,, 21 iu .
S és ortogonal 0, ji uu ji .
Conjunt ortonormal
S és un conjunt ortonormal de vectors si: a) S és un conjunt ortogonal. b) Tots els vectors de S són unitaris (norma = 1).
jiji
uu ijji 10
, .
Base ortogonal
Si B és base de E, B és base ortogonal si és un conjunt ortogonal de vectors.
Base ortonormal
Si B és base de E, B és base ortonormal si és un conjunt ortonormal de vectors.
6.4.4. Relació entre ortogonalitat i independència lineal
Tot conjunt S de vectors ortogonals és un conjunt linealment independent de vectors.
Demostració
Sigui nxxxS ......, 21 un conjunt ortogonal, jixx ji 0, . Comprovem que són linealment independents:

278
0xx00xxxx
0xx
00xxx
00xxx
iii
n
1iii
2i
n
1i
n
1kkiki
n
1kkk
n
1iii
22nn2211
inn2211
, que ja única solució ,,
,
....
? solució única ....
.
6.4.5. Exemples
Exemple 1
Tenim l'espai vectorial V de les funcions reals continues sobre l'interval , amb producte escalar definit de la següent manera:
dxxgxfgf )()(, .
Definim el subconjunt ...sin,sin,...cos,cos, x2xx2x1U . Demostreu que U és un conjunt ortogonal de vectors. NOTA:
babababababa
·cossin·sincos)sin(·sinsin·coscos)cos(
.
SOLUCIÓ:
. Fent el mateix:
.
Per tant, el conjunt U és un conjunt ortogonal.

279
Exemple 2 Aquest exercici s’ha de lliurar
Donats els següents vectors:
)1,1,3()3,0,1(
2
1
uu
.
a) Trobeu un vector 3u a 21 , uu . b) Normalitzeu els tres vectors. c) Comproveu que n3n2n1 uuu ,, formen una base ortonormal de 3 .
RESUM En aquesta sessió s’han presentat els conceptes d’ortogonalitat i de subespais ortogonals. S’han vist altres definicions relacionades amb aquest concepte (conjunts i bases ortogonals i ortonormals), i s’ha tractat la relació entre independència lineal i ortogonalitat.

280

281
SESSIÓ 33: Projecció ortogonal
FITXA DE LA SESSIÓ Nom: Projecció ortogonal Tipus: teòrica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’ha presentat el concepte de producte escalar entre vectors, cosa que ha donat lloc a les definicions d’angle entre vectors i d’ortogonalitat.
OBJECTIUS Estudiar el concepte de projecció ortogonal d’un vector sobre un altre vector.
CONTINGUTS Aquesta sessió defineix la projecció ortogonal d’un vector sobre un altre vector.
6.5. Projecció ortogonal d’un vector sobre un altre vector
6.5.1. Definició
Sigui w un vector no nul d’un espai vectorial E amb producte escalar definit. Es verifica que el coeficient c definit com
2
,,,
w
wvwwwv
c
és l’únic escalar tal que wcvv
' és ortogonal a w . Definim projecció de v al llarg de w :
wcwvproj ),( .
c rep el nom de coeficient de Fourier de v respecte de w , o la component de v al llarg de w .

282
6.5.2. Deducció del paràmetre c
v
wwc
wcvv '
0, wwcv
minwcv
Podem demostrar el valor del paràmetre c seguint dos raonaments diferents: a) Si volem que v’ sigui a w , forcem que el producte escalar sigui igual a 0.
wwwv
c
wwcwvwwcwv
wwcv
wv
,,
0,,,,
0,
0´,
.
b) Podem forçar que la norma de 'v sigui mínima.
Per treure l’arrel de la definició de norma, l’elevarem al quadrat i minimitzarem la norma al quadrat.
wcvvjawcvwcvv
´ que ,´ 2´
mínim)un (és 0 és cper derivada 2ª La ,,
,,
0,2,2
,,2,
,,,,,
opt
2
2
22
wwwv
c
wwcwv
wwcwvwcvdcd
wwcwvcvv
wwcwvcvwcvvwcvwcvwcv
opt
opt
opt
.

283
6.6. Projecció ortogonal d’un vector sobre un subespai vectorial de dimensió més gran que 1
6.6.1. Deducció Sigui
nrwwwW r ,.....,, 21
nE
EW
dim
Ev
rr wcwcwcv
.....2211 .
On el vector error vv ̂ ha de ser ortogonal a tots els vectors del subespai generat per
W si rr wcwcwcv
.....2211 és la millor aproximació.
Llavors, s’ha de complir per a cada vector de W que:
0wwcwcwvwwcwcv
0wwcwcv
0wvv
irr11iirr11
irr11
i
,...,,...
,...
,ˆ
.
Per tant,
1w
2w
v
11wc
22 wc v̂
vv̂

284
irri11irr11i wwcwwcwwcwcwv ,...,,..., .
Desenvolupant:
rrrr11rrr11r
2rr2112rr112
1rr1111rr111
wwcwwcwwcwcwv
wwcwwcwwcwcwv
wwcwwcwwcwcwv
,...,,...,
,...,,...,
,...,,...,
.
Compactant:
r
1
rrr1
1r11
r
1
c
c
wwww
wwww
wv
wv
,,
,,
,
,.
Si la base W és ortogonal, la matriu és diagonal i llavors podrem enunciar el teorema que es detalla al següent apartat.
6.6.2. Teorema
Sigui
nrwwwW r ,.....,, 21
nE
EW
dim .
Sigui W un conjunt ortogonal de vectors no nuls
Ev
ii
ii
nrr
wwwv
c
wvprojwvprojwcwcwcv
,,
),(...),(..... 12211
.
v és la millor aproximació que es pot fer del vector v en el subespai engendrat per iw (<W>). Se sumen totes les projeccions del vector v sobre tots els vectors que formen el conjunt ortogonal. Veiem una altra forma de demostrar el teorema. Volem que l'error ( vv
) sigui ortogonal a l'espai engendrat pels vectors iw .

285
ii
ii
iiii
ik
r
kikki
r
kikk
i
wwwv
c
wwcwv
wwwwcwv
wwcv
wvv
,,
,,
ji si 0, 0,,
0,
0,ˆ
1
1
.
6.6.3. Observació
Si rwwwv ,......., 21 , aleshores lògicament 0Error ˆ vv .
Així, si r = dim E i W és base ortogonal de E,
i11
1
111
1
w baseen v de components lessón ,,
,,
......,,
wwwvon
www
wvwww
wvv
Ev
nnn
n
.
RESUM En aquesta sessió s’ha estudiat el concepte de projecció ortogonal i els mitjans per calcular-la.

286

287
SESSIÓ 34: Exemples de projecció ortogonal i procés d’ortogonalització de Gram-Schmidt
FITXA DE LA SESSIÓ Nom: Exemples de projecció ortogonal i procés d’ortogonalització de Gram-
Schmidt Tipus: teòrica i problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’han vist els conceptes de vectors i subespais ortogonals i també el concepte de projecció ortogonal.
OBJECTIUS Mostrar exemples de projecció ortogonal i estudiar el procés d’ortogonalització de Gram-Schmidt.
CONTINGUTS Exemples de projecció ortogonal i descripció del procés d’ortogonalització de Gram-Schmidt.
6.6.4 Exemples de projecció ortogonal
Exemple 1
Sigui xP3 l’espai vectorial euclidià dels polinomis de grau menor o igual a 3, amb producte escalar:
1
0
)()(, dttgtfgf ,

288
i sigui Q el subespai engendrat pels vectors 22t ,1 . Trobeu la millor aproximació del vector xPtp 3
3 dins del subespai Q.
SOLUCIÓ
Com que el vector que trobarem pertany a Q, podem dir:
221 21),(ˆ tkkQpprojecp
.
Per tal de trobar el valor de k1 i k2 mirarem si 1 i 2t2 són ortogonals, ja que llavors els càlculs queden més senzills i podem dir que:
)2,()1,(),(ˆ 2tpprojecpprojecQpprojecp
032...22,1
1
0
22 tt .
Per tant, no són ortogonals i no podem aplicar el desenvolupament anterior. Per trobar el valor de k1 i k2 de:
2
21 21),(ˆ tkkQpprojecp
trobarem la matriu del sistema d’equacions que surt de plantejar:
02,01,ˆ
2
te
eQeepp
23
3
2
1222
2
2,1,
2,22,11,21,1
ttt
kk
tttt
,
on la matriu de 2x2 és la coneguda com grammià. Fent els productes escalars obtenim:
321516
1
31
41
54
32
321
2
1
2
1
k
k
kk
.
Per tant,
22221 16
1516
1232151
16121),(ˆ tttkkQpprojecp
.

289
Exemple 2
Sigui }cos,{ xsinxS un conjunt ortogonal de V espai vectorial de funcions contínues
en , amb
dxxgxfgf )()(, .
Trobeu la millor aproximació de h(x) = x com a combinació lineal dels vectors de S.
SOLUCIÓ
42
222cos1,
2coscoscos
,
cos,coscos, i
,,
cos)(ˆ
2 xsinxdxxxdxsinsinxsinx
xdxxxxvsinxdv
dxduxuxsinxdxsinxx
xxxx
sinxsinxsinxxon
xsinxxh
.
sinxxh
sinxdxxsinxsinxvxdv
dxduxuxdxxxx
2)(ˆ
0cos
coscos,
22 :Per tant
.
Exemple 3
Expresseu )2,3,4( w en components respecte de la base )1,2,1(),1,0,1(),1,1,1( B . Feu-ho aplicant l’observació anterior i confirmeu el
resultat amb el mètode tradicional (plantejant el sistema d'equacions corresponent).
SOLUCIÓ:
32
64
,,
326
,,
35
,,
33
33
22
22
11
11
vvvw
c
vvvw
c
vvvw
c
)32,3,
35(
B
w .
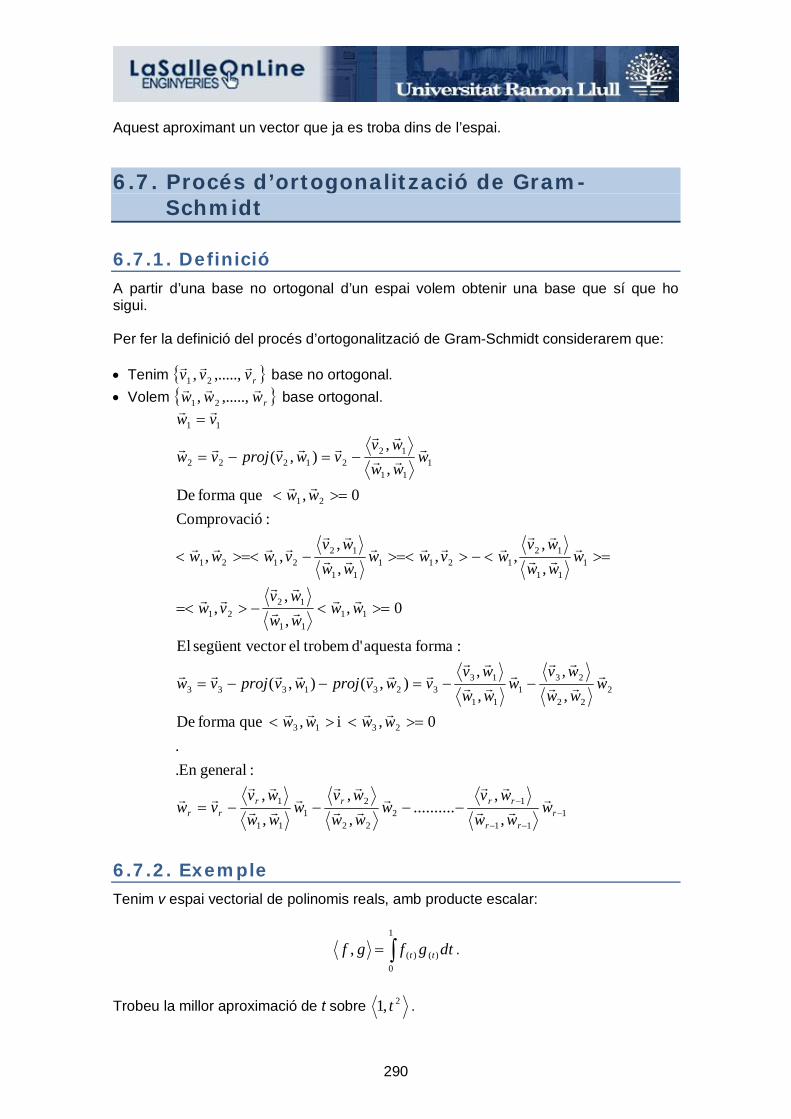
290
Aquest aproximant un vector que ja es troba dins de l’espai.
6.7. Procés d’ortogonalització de Gram-Schmidt
6.7.1. Definició A partir d’una base no ortogonal d’un espai volem obtenir una base que sí que ho sigui. Per fer la definició del procés d’ortogonalització de Gram-Schmidt considerarem que: Tenim rvvv ,.....,, 21 base no ortogonal. Volem rwww ,.....,, 21 base ortogonal.
111
12
22
21
11
1
2313
222
231
11
133231333
1111
1221
111
121211
11
122121
21
111
1221222
11
,,
..........,,
,,
:generalEn ..
0, i , que forma De,,
,,
),(),(
:forma aquestad' trobemelctor següent ve El
0,,,
,
,,
,,,,
,,
:óComprovaci 0, que forma De
,,
),(
rrr
rrrrrr w
wwwv
wwwwv
wwwwv
vw
wwww
wwwwv
wwwwv
vwvprojwvprojvw
wwwwwv
vw
wwwwv
wvwwwwwv
vwww
ww
wwwwv
vwvprojvw
vw
6.7.2. Exemple Tenim v espai vectorial de polinomis reals, amb producte escalar:
1
0)()(, dtgfgf tt .
Trobeu la millor aproximació de t sobre 2,1 t .

291
SOLUCIÓ:
Primer mirem si són ortogonals o no.
1
0
322
31
3,1 ttt .
Per tant no són ortogonals. Hem de trobar una base d'aquest espai que sigui ortogonal per tal de poder aplicar el teorema de la millor aproximació.
2
2222
2
31
0
2
222
22
1
t1615
163t
1t54411
211t
1t1tt1t1
11t1t
31
3tt
1t31t1
111t
tw
1w
ˆ
:Resultat
)(3//·)(3
3,3,3
,,ˆ
:serà óaproximacimillor La
comoditatper 3 vector el Agafem ,
,
.
RESUM En aquesta sessió s’han vist tres exemples de projecció ortogonal. A la part final s’ha estudiat el procés d’ortogonalització de Gram-Schmidt i s’ha vist un exemple on s’ha aplicat aquest procés per aconseguir una base ortogonal a partir d’una que no ho era.

292

293
SESSIÓ 35: Aplicacions pràctiques d’alguns conceptes estudiats al tema 6
FITXA DE LA SESSIÓ Nom: Aplicacions pràctiques d’alguns conceptes estudiats al tema 6 Tipus: pràctica Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A les sessions anteriors s’han estudiat els conceptes d’ortogonalitat i de projecció ortogonal.
OBJECTIUS Estudiar aplicacions pràctiques dels conceptes tractats de forma teòrica a les sessions anteriors.
CONTINGUTS Descripció de les aplicacions d’ALGTEC relacionades amb els conceptes estudiats al capítol 6.
6.8. Aplicacions desenvolupades en ALGTEC en què s’apliquen conceptes estudiats al tema 6
6.8.1. Aproximació d’un conjunt de punts per a una recta aplicant el criteri de mínims quadrats
Es presenta una situació en la qual disposem, per exemple, de diverses mesures presses al laboratori de la resistència que ofereix un resistor a diferents temperatures. Després d’observar que el comportament es bastant lineal, es planteja la possibilitat de no emmagatzemar totes les mostres obtingudes, sinó l’equació de la recta
que millor s’aproxima a totes aquestes mostres. A l’exercici es consideren varies mostres

294
conegudes , on representa la temperatura i representa el valor òhmic mesurat en aquesta temperatura. El valor fa referència al valor que pren la recta d’aproximació pel valor d’abscissa . És evident que per calcular la recta que millor s’aproxima als punts coneguts s’ha de determinar el criteri que s’utilitzarà per decidir si una recta es considera millor aproximació que una altra. En aquest exemple, l’error que es deu minimitzar és defineix de la següent manera: , on el subíndex i fa referència a cadascun dels punts coneguts. Al llarg de l’exposició en ALGTEC s’ofereix una visió algebraica del problema, en la qual finalment s’acaba buscant, seguint el criteri de mínims quadrats, la millor aproximació d’un vector , on , sobre el subespai vectorial de dimensió 2 engendrat pels vectors i ambdós pertanyents a . A l’exemple, el paràmetre n indica el nombre de punts coneguts. Per obtenir el vector s’aplica el procés d’ortogonalització de Gram-Schmidt a partir dels vectors i , i es projecta després el vector original sobre els vectors ortogonals obtinguts. Finalment, els paràmetres i buscats són les components del mateix vector en la base formada pels vectors i . Al mòdul d’experimentació associat es poden definir diversos punts coneguts, i obtenir el polinomi del grau seleccionat que millor aproxima els esmentats punts. A més, es pot comparar la norma de l’error obtingut quan s’utilitza l’aproximació calculada amb l’obtinguda prèviament quan s’utilitza com a aproximació qualsevol altre polinomi definit prèviament.
6.8.2. Disseny del diagrama de blocs d’un desmodulador QPSK
En primer lloc, s'exposa la necessitat de modular la informació binària que es desitja transmetre a través d'un canal de transmissió. De totes les modulacions digitals disponibles, l'explicació es centra en les modulacions de fase. L'exemple que es presenta utilitza la modulació QPSK. L'objectiu perseguit és el disseny del diagrama de blocs del sistema receptor que rebrà el senyal transmès, de manera que reconegui degudament la informació enviada per l'emissor. A l'exemple s'assumeix que el problema del sincronisme entre emissor i receptor està solucionat. Els senyals (símbols) que procedeixen de l'emissor es generen a partir d'una combinació lineal de dos senyals: i , on representa la pulsació del senyal portador. És a dir, , on representa un dels quatre símbols possibles que poden enviar-se des de l'emissor. A l'exemple presentat, els coeficients A i B poden prendre dos valors diferents, 1 o –1, segons el símbol enviat. Així, podem enviar quatre símbols diferents, i cadascun d'ells representa l'enviament de 2 bits: 00, 01, 10 o 11. Quan el senyal enviat des de l'emissor travessa el canal de transmissió, queda alterat per aquest, a causa del soroll, de les interferències i d’uns altres possibles efectes que es donen. Per aquest motiu, el senyal que arriba al receptor ja no és , sinó . El receptor, a partir de ha de ser capaç de deduir quin va ser el senyal transmès realment.

295
Al llarg de l'exposició es planteja el problema en termes algebraics. El símbol que és enviat des de l'emissor és generat a partir de la base ortogonal B formada pels senyals
i . És a dir, el símbol emès pertany al subespai engendrat per la base B . El senyal rebut , en general, no pertany a , però podem projectar-lo sobre aquest subespai per tal de trobar la millor aproximació de
. Aquesta aproximació la denominarem .
Per decidir quin dels quatre símbols possibles es va emetre, podem comprovar a quin d'ells s'apropa més el senyal . És a dir, podem calcular la distància entre cada símbol possible i , i decidir que es va emetre aquell símbol la distància del qual (error) sigui menor. A la part final de l'exposició es comprova que el diagrama de blocs del desmodulador està format pels mòduls necessaris per realitzar aquestes operacions algebraiques. El mòdul d'experimentació permet introduir la seqüència binària a transmetre utilitzant la modulació QPSK, i també permet modificar el nivell de soroll (variable aleatòria amb distribució gaussiana) que s'afegeix al senyal modulat. En pantalla pot visualitzar-se el senyal modulat enviat i el senyal rebut. També apareixen representats sobre el plànol tots els possibles símbols enviats, expressats en components respecte de la base B, i les projeccions sobre el mateix plànol dels símbols rebuts al receptor. Si s'incrementa el soroll introduït pel canal de transmissió es pot comprovar com, finalment, el sistema s'equivoca en fer la desmodulació, ja que l'error més petit ja no correspon sempre amb el símbol correcte enviat.
RESUM En aquesta sessió s’han vist des d’un punt de vista pràctic els conceptes estudiats al llarg del capítol 6.

296

297
SESSIÓ 36: Problemes resolts del capítol 6
FITXA DE LA SESSIÓ Nom: Problemes resolts del capítol 6 Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: no Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS Al capítol 6 s’han estudiat els conceptes d’ortogonalitat i de projecció ortogonal.
OBJECTIUS Mostrar un conjunt d’exercicis resolts que il·lustren els conceptes estudiats al llarg del capítol 6.
CONTINGUTS Aquesta sessió recull un conjunt d’exercicis resolts que il·lustren els conceptes estudiats al llarg del capítol 6.
6.9. Exercicis
6.9.1. Exercicis resolts
Problema R.1
Sigui 3 sobre espai vectorial euclidià amb el producte escalar euclidià, i donat el següent conjunt S:
a) Trobeu una base ortogonal del subespai vectorial de 3 engendrat pel conjunt de
vectors S. b) Trobeu una base ortonormal del subespai vectorial de 3 ortogonal al conjunt de
vectors S.
)}1,1,3(),1,1,1(),0,1,2{( S .

298
NOTA: utilitzeu el producte escalar euclidià i la norma euclidiana.
SOLUCIÓ:
a) Opció 1: busquem una base ortogonal pel mètode de Gram-Schmidt:
S u u u { ( , , ), ( , , ), ( , , )}1 2 32 1 0 111 3 1 1
)0,0,0()1,52,
51(
5656
)0,1,2(57)1,1,3(
,,
,,
)1,52,
51()0,1,2(
53)1,1,1(
,,)0,1,2(
222
231
11
1333
111
1222
11
vvvvu
vvvvu
uv
vvvvu
uv
uv
.
Com que v3 0 , els tres vectors de S són linealment dependents. Per tant S té
dimensió 2 i qualsevol base de S està formada per dos vectors.
Base ortogonal de <S> {(2, 1, 0), (–1/5, 2/5, 1)}.
Opció 2: busquem primer una base de )1,1,3(),1,1,1(),0,1,2(S . Dels tres generats només n’hi ha dos linealment independents, ja que
2110
111312
rang .
Per tant, una possible base de <S> és )}1,1,1(),0,1,2{(B . A partir d’aquesta base, aplicant Gram-Schmidt s’obté una base ortogonal de <S>.
b) Primer trobem S. Com que S té dimensió 2, només cal imposar ortogonalitat amb una base de S, per exemple prenent com a base de S {(2, 1, 0), (1, 1, 1)}:
S x x y z x y z i x y z { ( , , ) ( , , ), ( , , ) ( , , ), ( , , ) } 2 1 0 0 111 0
( , , ),( , , )( , , ),( , , )
( , , ) , ( , , ) ( , , ) ( , , ) ( , , )
x y zx y z
x yx y z
y xz x
x y z S x y z x x x x S
2 1 0 0111 0
2 00
2
2 1 2 1 1 2 1 .
Base de S = {(1, –2, 1)}.

299
Perquè sigui base ortonormal només cal normalitzar el vector, ja que la condició d’ortogonalitat només s’imposa quan tenim més d’un vector:
w1
1 2 11 2 1
1 2 11 2 1 1 2 1
1 2 11 4 1
16
1 2 1
( , ., )( , , )
( , , )( , , ), ( , , )
( , , ) ( , , ) .
Base ortonormal de S = {16
1 2 1( , , ) }.
Problema R.2
Donada la següent taula de valors:
X I 2 –1
–1 2 1 0 0 1
a) Trobeu la recta baxxy que aproxima el conjunt de punts anterior
minimitzant el següent error
4
1
2
iii xyy .
b) Avalueu el valor de l’error comès en fer l’aproximació per a una recta, tot justificant el resultat.
c) Si afegíssim al conjunt de punts donat a l’enunciat el punt 2,3 , com variaria el resultat? No feu cap càlcul, raoneu-ho.
SOLUCIÓ:
a) Definim els vectors:
1 1111 ( , , , ) . x ( , , , )2 1 1 0 vector de coordenades x. y ( , , , )1 2 0 1 vector de coordenades i.
L’objectiu és trobar la millor aproximació de y per combinació lineal de
x i 1 :
y ax b 1.
La solució és fer la projecció ortogonal següent:
y proj y x ( , , )1 .

300
Per calcular aquesta projecció, primer cal trobar una base ortogonal de 1, x . Usem
el mètode de Gram-Schmidt:
w
w xx
1
2
1 11111
111 2 11 0
24
1111 32
32
12
12
( , , , ),,
( , , , ) ( , , , ) ( , , , ).
Base ortogonal de
1 1 2, { , }x w w .
Calculem ara la projecció:
y proj y x
y ww w
wy w
w ww
( , , ),,
,,
( , , , ) ( , , , )
( , , , )
1
24
11115
53
23
21
21
21 2 0 1
1
1 11
2
2 22
.
Per trobar el valor de a i b resolem l’equació:
1 bxay
( , , , ) ( , , , ) ( , , , ) 1 2 0 1 2 1 1 0 1 11 1a b
11
10212
ba
bbababa
Recta: 1)( xxy .
b)
( ( )) ( ( )) ( ( )) ( ( ))( ( )) ( ) ( ) ( )
1 2 2 1 0 1 1 01 1 2 2 0 0 1 1 0
2 2 2 2
2 2 2 2
y y y y
Justificació: la recta passa pels quatre punts, ja que aquests estan alineats, per això l’error comès és igual a zero.
c) Si afegim el punt (3, –2), el resultat no es modifica, ja que i(3) = –2, per tant, el
nou punt passa per la recta trobada a l’apartat a). L’error comès continua sent zero.

301
Problema R.3
Sigui
},,1{ 2 kttB una base de l’espai vectorial format pels polinomis de grau <= 2 amb el següent producte escalar definit:
1
1
)()()(),( dttgtftgtf.
a) Quin valor ha de tenir k perquè B sigui base ortogonal? b) Trobeu les components del vector 22 2 tu en la base B sense resoldre cap
sistema d’equacions, utilitzant el càlcul de projeccions.
SOLUCIÓ:
a) Perquè B sigui base ortogonal, els vectors de B han de ser ortogonals dos a dos.
0,0,1
0,1
2
2
kttkt
t
k 0)(,
31-k 02
32)(,1
semprecompleix Es 0,1
1
1
22
1
1
22
1
1
dtkttktt
kdtktkt
tdtt
.
El valor que ha de tenir k perquè B sigui base ortogonal és 31
k .
b) El vector u pertany a l’espai vectorial engendrat pels vectors de la base B. Per tant, si trobem la projecció ortogonal de u sobre <B> estarem calculant el propi vector u .

302
0)22(
,,22
38
)22(
1,11,22
)31(1
1
1
2
1
1
22
2
1
1
1
1
22
1
2321
dtt
dttt
ttttc
dt
dtttc
tctccu
2)
31(
)31)(22(
31,
31
31,22
1
1
22
1
1
22
22
22
3
dtt
dttt
tt
ttc .
Per tant,
20
38
Bu .
Problema R.4
Sigui V l’espai vectorial format pels polinomis de grau <= 2 (expressió general: 2ctbta ).
Donat el vector 1 tw , i el següent producte escalar:
1
0
)()()(),( dttgtftgtf .
a) Trobeu la millor aproximació del vector tu 2
sobre el subespai engendrat pels
vectors 2,1 t . b) Trobeu la condició que compleixen els coeficients ',,' cba de tots els polinomis
Vv que tenen com a projecció sobre w el següent vector: .66),( twvproj
SOLUCIÓ:
a) Per trobar la millor aproximació de w sobre el subespai engendrat pels vectors {1, t2} hem de trobar primer una base ortogonal d’aquest subespai i després projectar w sobre aquesta. Apliquem Gram-Schmidt:

303
311
1
21
0
1
0
2
22
1
t
dt
dtttw
w
.
Així:
83
815)
31(
24451)
31(
)31(
)31(2
12
ˆ 2221
0
22
1
0
2
1
0
1
02211
ttt
dtt
dttt
dt
tdtwcwcu .
Per tant,
83
815ˆ 2 tu .
b) wtwvproj 666),( .
Veiem que el valor del coeficient de projecció és 6.
1
0
2
1
0
2
024c2b6a 2))(1(,
31)1(,
2316,6, 6
,,
dtctbtatwv
dttww
wwwvwwwvc
.
Per tant, la condició buscada és:
024c2b6a .
Problema R.5
Sigui V l'espai vectorial dels polinomis de grau <= 2 (forma dels vectors: p(t) = a + bt + ct2), amb el següent producte escalar:
1
0)()(, dttgtfgf .
Sigui S el subespai engendrat pel següent conjunt de vectors: }2 ,2 ,1{ tt .

304
a) Trobeu una base ortonormal de S. b) Trobeu una base ortogonal de .S
SOLUCIÓ:
a) Base ortonormal del subespai S on 2 ,2 ,1 ttS .
Busquem primer una base de S.
}2 ,2 ,1{ tt és un conjunt linealment depenent, i només hi ha dos vectors linealment independents. Per tant, una possible base de S és }2 ,1{ tB . A partir de la base B, i aplicant el mètode de Gram-Schmidt, obtenim una base ortogonal:
1)(1 tw
1211121
1
221
1,11,22)( 1
0
1
02
tt
dt
dttttttw .
Base ortogonal de S: }12 )( ,1)({' 21 ttwtwB . Per trobar una base ortonormal només cal normalitzar els dos vectors de la base B’:
11)(111,1)( 1
1
0
21 twdttw
31)(
31)12(12,12)( 2
1
0
222 twdtttttw .
Base ortonormal de S: )12(3,131/12 ,
11''
ttB .
b) Calculem primer S :
StwtwtpVctbtatp )(0)(),()(S 2 .
Hem d’imposar que 2)( ctbtatp sigui ortogonal a tots els vectors d’una base de S, per exemple }2 ,1{ tB :
021
3202)(02,
031
21001,
1
0
22
1
0
22
cbadttctbtatctbta
cbadtctbtactbta
,

305
s’obté el sistema d’equacions:
cb
cacbacba
61
03460236
)61(
61)( 222 ttcctctcctbtatp ,
base de S
2
61 tt , és base ortogonal ja que només conté un vector.
Base ortogonal de S :
2
61 tt .
Problema R.6
Donat el següent conjunt de punts: {(0, 1), (1, 2), (2, 6)}. a) Trobeu la recta baxy que millor aproxima el conjunt de punts anterior segons
el criteri dels mínims quadrats. b) Suposem ara el següent conjunt de punts: {(0, 2), (1, 3), (2, 5), (3, 8)}. Expliqueu
clarament els passos que hauríem de seguir per fer l'aproximació d'aquest conjunt de punts per a una paràbola ( cbxaxy 2 ) segons el mateix criteri de l'apartat a). Només s'ha de raonar la resposta, no s'han de fer càlculs.
SOLUCIÓ:
a) Definim els vectors:
)1,1,1(1
. )2,1,0(x vector de coordenades x. )6,2,1(y vector de coordenades i.
L’objectiu és trobar la millor aproximació de
y per combinació lineal de x i 1 :
y ax b 1.
La solució és fer la projecció ortogonal següent:
y proj y x ( , , )1 .
Per calcular aquesta projecció primer cal trobar una base ortogonal de
1, x . Usem
el mètode de Gram-Schmidt:

306
)1,0,1()1,1,1(33)2,1,0(1
1,11,
)1,1,1(1
2
1
xxw
w
.
Base ortogonal de },{,1 21 wwBx
.
Calculem ara la projecció:
)2
11,3,21()1,0,1(
25)1,1,1(
39
)1,0,1()1,0,1(),1,0,1()1,0,1(),6,2,1()1,1,1(
)1,1,1(),1,1,1()1,1,1(),6,2,1(
,,
,,),1,( 2
22
21
11
1
wwwwyw
wwwyxyprojy
.
Per trobar el valor de a i b resolem l’equació:
y ax b 1
)1,1,1()2,1,0()2
11,3,21( ba
2/12/5
2/112332/1
ba
baba
b
.
Recta: 21
25)( xxy .
b) Conjunt de punts {(0, 2), (1, 3), (2, 5), (3, 8)}. Cal fer l'aproximació d'aquest conjunt de punts per a una paràbola cbxaxy 2 .
Si volem que tots els punts verifiquin l’equació de la paràbola hem de resoldre el següent sistema d’equacions:
833522
311200
2
2
2
2
cbacba
cbacba
és un sistema incompatible.

307
Escrit en forma vectorial:
8532
1111
3210
3210
2
2
2
2
cba definint
8532
,
1111
1 ,
3210
,
3210
2
2
2
2
2 yxx ,
s’obté:
1 2
cxbxay .
Com que el sistema és incompatible, no té solució.
Considerem 2 ,,1 xxW un subespai engendrat. El sistema és incompatible, per
tant Wy . Trobem una base ortogonal de W per Gram-Schmidt: 321 ,, wwwB
.
Calculem 332211),( wcwcwcWyprojy .
Resolem l’equació 1 ˆ
2
cxbxay i trobem els coeficients a, b i c.
Solució:
cbxaxy 2 .
Problema R.7
Donada la següent aplicació:
2222112211
22
,),( vuKvuKvuvuvuvu
,
on
2121 , i , vvvuuu
. a) Sabent que l’aplicació és bilineal, per a quins valors de K1 i K2 defineix un
producte escalar? b) Per a K1= 0 i K2 = 1, trobeu quin vector dels següents {( 2, 1), (1, 4)} s’aproxima
més al vector (1, 3).

308
SOLUCIÓ: a) Com que compleix la propietat de bilineal, només queda comprovar la simètrica i
la definida positiva.
Simètrica S’ha de complir: uvvu ,, .
2222112211
2222112211
,,
uvkuvkuvuvuvvukvukvuvuvu
.
Com es pot observar, és compleix per a:
01
2
k
k
.
Definida positiva S’ha de complir:
00,
0,
uuu
uuu
.
Estudiant obtenim:
10?
)1(, 22
222
12
222
22
1 KuKuuKuuuu .
Comprovant el 2n punt:
00,
uuu
10?
)1(, 22
222
12
222
22
1 KuKuuKuuuu .
Per tant,
10
2
1
KK
.
b) Ens demanen quin vector s’aproxima més, no quin vector té la millor aproximació. Per tant, hem de trobar l’error, la magnitud dels vectors diferència i comparar-los:

309
2)10(),10(,)10()31()41(
39)21(),21(,)21()31()12(
21222
1111
eeee
eeee
.
Com es pot observar, el vector (1, 4) és el que té l’error més petit i, per tant, és el que s’aproxima més.
Problema R.8
Sigui la següent aplicació candidata a ser un producte escalar de matrius d’ordre 2:
. On , i són constants reals. a) Calculeu per a quins valors de les constants , i es verifica la propietat de
simetria del producte escalar. b) Calculeu l’angle entre les dues matrius i següents:
. Utilitzeu el producte escalar de l’enunciat per a i , i amb la norma induïda a partir del mateix producte escalar.
SOLUCIÓ:
a) Calculem:
.
Com es pot comprovar, restant els dos productes obtenim:
.
Perquè es compleixi la igualtat per a qualssevol dues matrius i cal que:
.
b) Recordem com es defineix l’angle entre dos vectors, en general:

310
.
Problema R.9
Sigui el següent producte escalar definit en l’espai vectorial (polinomis de grau <= 2) sobre :
. I siguin: un conjunt de vectors de .
una base de , de la qual sabem que
i que , amb el producte escalar definit.
a) Calculeu una base i la dimensió del subespai ortogonal al conjunt . b) Calculeu una base ortonormal de partint de la base original . c) Calculeu la millor aproximació del polinomi dins del subespai engendrat
pels polinomis . SOLUCIÓ:
a) Sigui un polinomi de :

311
.
Resolent el sistema compatible indeterminat arribem a la condició: i , és a dir, , per tant, i
b) Apliquem Gram-Schmidt:
.
Observem que els dos primers passos no suposen cap càlcul, ja que, segons l’enunciat, els dos primers polinomis són ortogonals. Aleshores i per tant, passem directament a calcular els productes escalars implicats en el tercer pas del procés d’ortogonalització:
.
Per tant, el tercer vector dóna:
.
Ara només queda normalitzar el tercer vector, ja que els dos primers ja estan normalitzats segons l’enunciat:

312
.
Ara:
és un conjunt ortonormal respecte del producte escalar definit a l’enunciat.
c) Observem que els polinomis ortonormals de l’apartat anterior:
són bases del subespai engendrat pels polinomis , per tant els podem fer servir per realitzar el càlcul de la projecció del polinomi , que ens donarà la millor aproximació d’aquest dins del subespai. D’altra banda, podem comprovar com el que es demana és el terme que resta al tercer pas del procés de Gram-Schmidt de l’apartat anterior:
.
Com que els polinomis són unitaris, els termes divisors són iguals a 1, per tant només cal realitzar el càlcul de dos productes escalars:
,
.
Per tant,

313
.
Forma alternativa de resolució, sense aprofitar els càlculs de l’apartat b):
Apliquem Gram-Schmidt al conjunt :
.
Calculem la projecció ortogonal:
.
Problema R.10
La senyora Josepa, de l’empresa Josepa’s Fruit S.L. del sector de l’alimentació, ha encarregat el disseny d’un prototip per classificar de forma automàtica la fruita en una de les línies d’envasament de la seva empresa. El sistema realitzarà la classificació automàtica (per varietats de fruita) a partir de tres paràmetres mesurats en temps real per a cada peça -èsima de fruita: el pes de cada peça de fruita, obtingut mitjançant una balança digital; els paràmetres d’excentricitat i tonalitat associats a la forma i el color de cada
peça -èsima, calculats mitjançant un sistema de visió per computador capdavanter.
L’empresa subcontractada ha dissenyat una base de dades amb els paràmetres d’una remesa de 1.500 peces ( ), que conté 100 exemplars
de cadascuna de les 15 varietats de fruita que comercialitza l’empresa de la senyora Josepa. La base de dades incorpora al registre de cada peça -èsima l’etiqueta ( ) associada a la varietat que li correspon.

314
Es demana: a) Proposeu un procediment que permeti, fent ús de la base de dades creada, la
classificació automàtica d’una nova peça a partir dels paràmetres de pes, excentricitat i tonalitat donats pel vector .
b) S’ha observat que a la varietat de poma Golden hi ha una gran dependència lineal
entre els paràmetres i . Per tant, seguint el criteri dels mínims quadrats, ens proposem calcular la recta que millor aproxima el conjunt de punts
per , corresponents a aquesta varietat de fruita. Indiqueu el procediment que seguiríeu per calcular els coeficients i d’aquesta recta que millor aproxima, tot indicant de forma explícita les equacions de càlcul que caldria aplicar i quina és la dimensió dels vectors implicats en aquestes equacions.
SOLUCIÓ:
a) L’algorisme seria escollir la varietat associada a la peça de fruita de la base de dades que té una distància mínima amb el vector de la nova peça d’entrada:
.
Definint com a distància d’un vector la seva norma euclidiana:
.
En el cas que hi hagi més d’una fruita de la base de dades que tingui distància mínima amb el vector de la nova fruita a classificar, es podria escollir el vot majoritari (varietat més freqüent) i, en cas d’empat, escollir la varietat d’una de les que minimitzen la distància escollida de forma arbitrària.
Addicional
Com a mesura per donar major robustesa al procés de classificació (menor nombre d’errors), es podria: Realitzar una llista amb els elements de la base de dades que tenen una distància
menor amb la nova peça entrada. És a dir:
. Ordenar creixentment les distàncies en una nova llista de distàncies:
.
Seleccionar les distàncies menors:
.

315
Classificar la nova peça en la varietat majoritària de la llista de varietats associades a l’anterior llista de peces amb menor distància euclidiana:
.
b) Si expressem els 100 vectors de paràmetres aproximats pel model lineal:
.
On és el vector amb els pesos de les 100 fruites de la varietat poma Golden de la base de dades, és un vector de dimensió 100 amb uns en totes les posicions, i és un vector amb el valor, aproximat mitjançant una recta, dels paràmetres de tonalitat associats a les 100 fruites de varietat poma Golden de la base de dades.
Segons el teorema de l’aproximació, podem resoldre el valor de les constants i imposant que l’error de l’aproximació de mitjançant sigui ortogonal als vectors usats per aproximar i , és a dir:
.
On és el producte escalar euclidià en .
Mètode alternatiu:
Podem començar per trobar una base ortogonal del subespai d’aproximació (subespai engendrat pels vectors i ), usant el procediment de Gram-
Schmidt:
.
On és el producte escalar euclidià en . Es pot observar que en el cas que i siguin ortogonals (és a dir, ) aleshores es complirà que i també . Una vegada ja tenim la base ortogonal, podem aplicar la projecció ortogonal (teorema de la millor aproximació) realitzant senzilles projeccions ortogonals del vector a aproximar sobre els elements d’aquesta base, és a dir:

316
.
On és el producte escalar euclidià en .
Per acabar de trobar els valors de les constants i només cal fer el canvi de variable del procés de Gram-Schmidt anterior i agrupar els termes:
.
Per tant,
.
RESUM En aquesta sessió s’ha presentat un recull d’exercicis resolts que il·lustren els conceptes estudiats al llarg del capítol 6.

317
SESSIÓ 37: Problemes proposats del tema 6
FITXA DE LA SESSIÓ Nom: Problemes proposats del tema 6 Tipus: problemes Format: no presencial Durada: 5 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
PRECEDENTS A la sessió anterior s’ha mostrat un recull de problemes resolts del capítol 6.
OBJECTIUS Proposar un conjunt d’exercicis del capítol 6 per posar en pràctica els conceptes estudiats.
CONTINGUTS Problemes proposats del capítol 6.
6.9.2. Exercicis proposats
Problema P.1
Trobeu la distància i l’angle que formen els següents vectors. NOTA: definim la distància entre 2 vectors com la norma de la diferència entre vectors, i la norma definida a partir del producte escalar utilitzat en cada cas, és a dir
d x y x y x y x y , , . a) u 1 3 5 7 i v 4 2 8 1 a 4 amb el producte escalar euclidià.
b) u t t 2 i v t t 3 2 , on u v u t v t dt, 0
1.

318
Problema P.2
Sigui V l'espai vectorial dels polinomis de variable i coeficients reals sobre amb el producte escalar:
f g f t g t dt, 01
.
Siguin f t t 2 , g t t 3 2 i h t t t 2 2 3 elements de V. Calculeu: a) f g, i f h, .
b) f i g (essent • la norma induïda pel producte escalar). c) Normalitzeu f i g.
Problema P.3
Sigui V l’espai vectorial dels polinomis de coeficients i variable real amb producte escalar:
f g f t g t dt, 1
1.
Trobeu, aplicant el procés d’ortogonalització de Gram-Schmidt, una base ortogonal del subespai P3[t] dels polinomis de grau 3 , a partir del conjunt 1 2 3, , ,t t t .
Problema P.4
Sigui M2x3 l'espai vectorial de les matrius de 2 files i 3 columnes amb coeficients reals sobre , i producte escalar:
A B tr B AT, . Siguin:
42
0153
,63
5421
,47
5689
CBA
elements de M2x3. Calculeu: a) A B A C, , , i B C, . b) 2 3 4A B C , . c) A i B .

319
d) Normalitzeu A i B.
Problema P.5
Sigui 2 un espai vectorial sobre . Definim la següent aplicació:
221221112121
22
3, yxyxyxyxyyvxxu
.
Comproveu si aquesta aplicació és un producte escalar.
Problema P.6
Determineu k perquè els següents parells d’elements siguin ortogonals: a) u k 1 2 3 i v k 3 7 5 en 4 i el producte escalar usual.
b) f t t k i g t t 2 , on f g f t g t dt, 0
1.
Problema P.7
Sigui w 1 2 3 1 un vector de 4. Trobeu una base ortogonal de w.
Problema P.8
Sigui 3321 145,321,111 uuuB .
a) Comproveu si B és o no és una base ortogonal de 3. b) Expresseu el vector v 1 5 7 com a combinació lineal de u u1 2, i u3 sense
resoldre cap sistema d’equacions lineals.
Problema P.9
Determineu els valors de k per als quals la següent aplicació f: 2 2 és un producte escalar:
f u v x y x y x y k x y , 1 1 1 2 2 1 2 23 3 essent u x x 1 2 i v y y 1 2 .

320
Problema P.10
Sigui V l’espai vectorial de les funcions reals contínues a l’interval 1 1, amb producte escalar:
f g f t g t dt,
1
1
.
Sigui W el subespai de V dels polinomis de grau 3. Trobeu la projecció de f t t 5 sobre W. NOTA: feu servir els polinomis ortogonals (de Legendre) 1 3 1 5 32 3, , ,t t t t .
Problema P.11
Sigui V l’espai vectorial dels polinomis de coeficients i variable real amb producte escalar:
1
1
, dttgtfgf .
Considereu el conjunt de polinomis 2,1 tS . a) Ortogonalitzeu el conjunt de polinomis S segons el producte escalar definit a
l’enunciat. b) Trobeu la projecció de la funció tttf 4 sobre el subespai engendrat pel
conjunt S. c) Si calculem la projecció de la funció 4ttg sobre el mateix subespai <S>,
s’observa que el resultat és el mateix que a l’apartat b). Justifiqueu el resultat, sense realitzar la projecció citada.
Problema P.12 Aquest problema s’ha de lliurar
Sigui V l’espai vectorial dels polinomis de grau 2 sobre , i el producte escalar:
f g f t g t dt, 1
1
.
Siguin f t a a t a t 0 1 2
2 i g t b b t b t 0 1 22 dos polinomis qualssevol (amb
a a a b b b0 1 2 0 1 2, , , , , ). a) Expresseu de forma genèrica f g, . b) Sigui B t t 1 2, , una base de V. Trobeu la matriu A que permet expressar el
producte escalar de la següent forma:

321
f g f A gB
T
B, (essent f
Bi g
B vectors columna).
c) Calculeu t t t 2 3 42, mitjançant l’expressió de l’apartat b) i comproveu-ho
amb l’expressió integral de l’enunciat.
RESUM En aquesta sessió s’ha proposat un recull d’exercicis del capítol 6.

322

323
SESSIÓ 38: Exercici de modelització
FITXA DE LA SESSIÓ Nom: Exercici de modelització Tipus: problemes Format: no presencial Durada: 10 hores Treball a lliurar: sí Material:
o Bibliografia bàsica: [Flaquer1996]
OBJECTIUS Abordar un problema real amb les eines algebraiques estudiades a les sessions anteriors.
CONTINGUTS Descripció d’un problema real per ser tractat amb les eines estudiades a les sessions anteriors.
6.10. Exercici de modelització En aquesta sessió els alumnes hauran d’enfrontar-se a un exercici extret del món real, que hauran de resoldre utilitzant les eines algebraiques estudiades a les sessions anteriors. Per a això es generaran grups de treball formats per 3 alumnes. L’enunciat i el contingut dels informes a presentar es detallaran en un fitxer apart.
6.10.1. Enunciat L’empresa ALG-SOLUTIONS ha fet a tots els seus treballadors (39) varies fotografies (veure la figura 1) amb la finalitat de generar una base de dades amb les cares de tots ells. La intenció de l’empresa és la d’instal·lar un nou sistema de seguretat que permeti identificar-los de forma automàtica quan accedeixen a l’edifici on treballen. Cada fotografia realitzada està formada per 4.875 píxels (75 files x 65 columnes). L’objectiu de l’exercici de modelització que es proposa és dissenyar i generar el procediment que realitzarà el reconeixement de cares. És a dir, donada la imatge (cara) d’una persona que vol accedir a l’edifici, el procediment desenvolupat haurà de buscar a la base de dades de fotografies i identificar de quina persona es tracta. A més, ho haurà de fer de la forma més ràpida possible per poder aplicar-ho en temps real.

324
L’empresa ens ha subministrat la matriu (matriu_cares) amb totes les imatges de les cares de tots els seus treballadors col·locades en columnes. És a dir, cada columna correspon als píxels de tota una fotografia, col·locats un sota l’altre. L’empresa té 39 treballadors diferents i en total s’han fet 384 fotografies (pràcticament 10 fotografies per cada treballador). Per tant, la matriu_cares té unes dimensions de 4.875 files x 384 columnes. A més, ens han donat també el vector identificador que ens informa del número de treballador al qual correspon cada imatge (columna) en la matriu_cares. Per exemple, el vector identificador té un 6 a la posició 51 (identificador(51) = 6). Això vol dir que la columna 51 de la matriu_cares conté una fotografia del treballador número 6. L’empresa també ens ha donat 16 fotografies més per fer-les servir de prova en el nostre procediment. Aquestes 16 imatges ens les han donades amb el mateix format que les anteriors, dins de la matriu matriu_test (4.875 files x 16 columnes). De la mateixa forma que abans, ens donen el vector ident_test on tenim, en cada posició, el número que identifica el treballador que apareix en cada columna de la matriu_test. Les 10 columnes finals d’aquesta matriu corresponen a un usuari que no és un treballador de l’empresa i, per tant, no es troba a la matriu_cares de referència (aquesta persona s’identifica amb el número 40). Proposem dividir la resolució del problema en dos fases diferents: Fase 1: reduir les dimensions dels vectors que identifiquen les cares. Com que cada imatge està identificada per un vector de 4.875 posicions, treballar amb vectors de aquestes dimensions no serà ràpid. Per tant, si volem que el sistema faci de forma ràpida la identificació del treballador, proposem expressar prèviament cada imatge en una base on podem quedar-nos amb moltes menys components. Fase 2: comparar la imatge de la persona que vol accedir a l’edifici amb les fotografies dels treballadors, expressades en la nova base (reduïda), per tal d’identificar de quin treballador es tracta.

325
Figura 1. Base de dades amb totes les fotografies (“Databases of Faces”, de AT&T Laboratories Cconridge).

326
6.10.2. Qüestions orientatives i per reflexionar
Ajuda
Recordeu que la descomposició en valors singulars d’una matriu A consisteix en:
. Recordeu també que la matriu representa els vectors de la matriu A expressats en la base formada pels vectors columna de la matriu U. Fixeu-vos que aquesta matriu es pot veure com el producte de la matriu inversa de U per la matriu A. És a dir, la matriu U-1 representa la matriu de canvi de base, de canònica, a la nova base formada pels vectors columna de la matriu U. Recordeu que, en aquest context, U-1 = UT. Si trunquem els primers p coeficients (és a dir, ens quedem amb les p primeres components dels vectors que formen la matriu A, expressats en la base de vectors que formen les columnes de la matriu U), la reconstrucció de la matriu A es fa de la següent forma:
(Equació 1). Fixeu-vos que per reconstruir cada imatge a partir de les p primeres components en la nova base es multiplica cada imatge, expressada amb les p primeres components, per la matriu Ut (observeu l’equació 1).
Preguntes a respondre
1. Quin és el factor de compressió obtingut si reduïm la dimensió dels vectors que
representen les imatges de 4.875 a 100 components? Com s’aconsegueix aquesta reducció? Expliqueu-ho amb detall.
2. Com reduïm la dimensió de la nova imatge corresponent a la persona que vol accedir l’edifici, de manera que es representi també com un vector de 100 components?
3. Quina és l’estratègia que feu servir al vostre procediment per decidir quin dels treballadors és la persona que vol accedir a l’edifici? Expliqueu-ho amb detall.
4. Com podríem saber si la persona que vol entrar no és un treballador de l’empresa?
5. Creieu que la situació que es presenta en aquest exercici es podria resoldre sense reduir la dimensió de les imatges? Com creieu que afectaria a la resolució?
327
6.10.3 Estructura i contingut de l’informe que ha de presentar-se
L’informe ha de presentar-se en grup, i ha de contenir els següents apartats: Portada (copiar la que apareix a l’estudi). Índex. Enunciat del problema. Objectius perseguits amb la realització de l’exercici. Anàlisi d’allò que es demana al
problema i vinculació amb la teoria explicada a classe, justificant aquesta vinculació. Resposta a les cinc preguntes plantejades, amb les simulacions realitzades en
Matlab o en Octave (si s’han realitzat). Conclusions i comentaris.
o Realitzar una crítica sobre la solució proposta. Comentar els punts forts i dèbils. o Realitzar una crítica sobre el treball en grup desenvolupat. Aspectes positius i
negatius del treball en grup amb els companys durant la realització de l’exercici. Proposta d’alternatives justificades per millorar la forma de treballar.
o Opinió respecte de l’exercici de modelització proposat.
6.10.4 Criteris que s’aplicaran en l’avaluació de l’informe presentat
Els conceptes que seran avaluats en l’informe i el mode en el qual seran avaluats es detallen a continuació:
Nivell de qualitat assolit Molt malament
(MM) Malament
(M) Regular
(R) Bé (B)
Molt Bé (MB)
Estructura i organització
El format del document no s’adapta en absolut a l’establert. Hauria de
refer-se tot.
El format no
s’adapta, en la seva majoria, al format establert.
Existeixen dos o tres aspectes que
no s’ajusten al format. Amb retocs
simples podrien arreglar-se.
Existeix algun aspecte que no
s’ajusta al format, encara
que no és important.
El document s’ajusta
totalment al format establert.
Claredat de les explicacions
La major part del text
presenta frases
confuses. A vegades no és
possible entendre què
s’intenta expressar.
El text és molt difícil de
comprendre. La major part del text presenta
frases llargues i confuses. Exigeix
constantment de la relectura de
frases.
Apareixen varies frases confuses que obliguen el
lector a rellegir-les per tal de
comprendre-les.
En alguna ocasió puntual
el lector es perd en alguna frase llarga i confusa,
obligant-lo a rellegir-la dues o tres vegades per tal d’entendre-la.
Els continguts s’exposen amb molta claredat. Les frases són curtes i fàcils d’entendre.
Desenvolupament de les preguntes
proposades
No s’ha contestat
correctament cap de les preguntes
proposades.
Només s’ha desenvolupat
correctament 1 de les
preguntes proposades.
S’han desenvolupat correctament 2 o 3 de les preguntes
proposades.
S’han desenvolupat
correctament 4 de les preguntes
proposades.
Les 5 preguntes proposades
s’han desenvolupat i
contestat correctament.
Conclusions i comentaris
No té conclusions.
Comentaris molt simples i
mancats de contingut.
Les conclusions es centren
exclusivament en les respostes a les
preguntes proposades a
l’exercici, sense reflexionar sobre
Es mostra una valoració global
del exercici sense aprofundir
massa en l’objectiu perseguit.
Els comentaris mostren una
profunda reflexió sobre els
objectius de l’exercici, a més
d’una crítica constructiva.

328
altres aspectes importants.
RESUM En aquesta sessió s’ha proposat un exercici per posar en pràctica els conceptes estudiats a les sessions anteriors en el context d’un problema real.

329
Bibliografia
LLIBRES
Flaquer, J., Olaizola, J., Olaizola, J. Curso de Álgebra Lineal. Universidad de Navarra, S.A. (EUNSA), 1996. [Flaquer1996] Moon, T.K., Stirling, W.C. Mathematical Methods and Algorithms for Signal Processing. Prentice Hall. 2000. [Moon&Stirling2000]














![[DEED OF ASSIGNMENT] THIS DEED OF ASSIGNMENT BETWEEN …202.61.117.163/attachments/GridAttach/hira/nproj... · 2018. 11. 16. · 1 [DEED OF ASSIGNMENT] THIS DEED OF ASSIGNMENT is](https://static.fdocuments.in/doc/165x107/607e3f6edd371f6d8d0ddc30/deed-of-assignment-this-deed-of-assignment-between-20261117163attachmentsgridattachhiranproj.jpg)


