Creating Cube-Maps - Real World Photography Guide.pdf · Creating Cube-Maps - Real World...
2
Creating Cube-Maps - Real World Photography To create a cubemap from photography, you will need : 1. A set of images (preferably very high resolution) shot in a way to cover a full 360° panorama from a single point of view. 2. A 360° image built from stitching the set from step 1 together - usually a spherical, cyndrilical, or equirectangular image. 3. Software that converts combined 360° image from step 2 into the cubemap format. This 360° Image of coral reef near Heron Island is a equiractangular spherical panorama, meaning if you wrapped this rectangular image around the interior geometric faces of a sphere and viewed it from the inside, it would then appear undistorted. Note that this image is far too low resolution / quality to be acceptable for the cubemap format in VR. Remember, whatever resolution a panorama is, it will be stretched across a 360 degree view, so always provide as high a quality set of starting images as possible. When combined, this set of images provide a 360° viewing angle of Bangkok. Note that the exposure is quite different between images and that stitching lines are very apparent. For many images, this can be cleaned up automatically, but the best cubemaps are created by those willing to provide a lot of high-quality RAW format HDR images and put in the time to manually blend exposures between images and remove stitchlines that automatic solutions might miss. Once you have your set of images, assemble them using the appropriate stitching method. There are many pieces of software that will auto-stitch photos together into a single 360° image. The best free solution for for fully automated image stitching is Microsoft’s Image Composite Editor . However, If you prefer more manual control, you can also do this in any recent version of Photoshop using the “Photomerge” action (File>Automate>Photomerge...)and then adjust in the assembled file as needed. After building the combined image, you then need to pass the file into another piece of software that will convert it into a cubemap, which is an image format that provides 6 images for each of a cube’s faces. When the 6 images of a cubemap are applied to the proper interior faces of a cube and viewed from the inside, the image will appear seamless and undistorted. The most versatile software package for doing this is Pano2VR. Pano2VR will allow for many input formats and will export out each of the 6 images needed to give you a full cubemap. In Pano2VR, in the Input column on the left, click “Select Input” and match the input format to the combined 360° stitched image file created in the previous steps. Then in the Output column, click the “New Output Format” dropdown and make sure it’s on the “Transformation” option. In the Settings tab, change the “Type” dropdown to “Cube Faces,” change the “Face Names” dropdown to “‘front’..’down’” and choose an image size of at least 2048x2048. Note that this resolution is recommended for each face to provide maximum pixel density in Gear VR. Under the “Output” section at the bottom on the “Format” dropdown, choose PNG (.png) to ensure minimal compression artifacts.
Transcript of Creating Cube-Maps - Real World Photography Guide.pdf · Creating Cube-Maps - Real World...

Creating Cube-Maps - Real World PhotographyTo create a cubemap from
photography, you will need :
1. A set of images (preferably very
high resolution) shot in a way to
cover a full 360° panorama from
a single point of view.
2. A 360° image built from stitching
the set from step 1 together -
usually a spherical, cyndrilical,
or equirectangular image.
3. Software that converts
combined 360° image from
step 2 into the cubemap format.
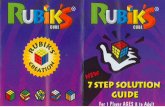
This 360° Image of coral reef near Heron Island is a equiractangular spherical panorama, meaning if you wrapped
this rectangular image around the interior geometric faces of a sphere and viewed it from the inside, it would then
appear undistorted.
Note that this image is far too low resolution / quality to be acceptable for
the cubemap format in VR. Remember, whatever resolution a panorama is,
it will be stretched across a 360 degree view, so always provide as high a
quality set of starting images as possible.
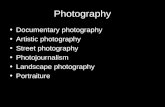
When combined, this set of images provide a 360° viewing angle of Bangkok. Note that the exposure is quite different
between images and that stitching lines are very apparent. For many images, this can be cleaned up automatically,
but the best cubemaps are created by those willing to provide a lot of high-quality RAW format HDR images and put
in the time to manually blend exposures between images and remove stitchlines that automatic solutions might miss.
Once you have your set of images,
assemble them using the appropriate
stitching method. There are many
pieces of software that will auto-stitch
photos together into a single 360°
image.
The best free solution for for fully
automated image stitching is
Microsoft’s Image Composite Editor.
However, If you prefer more manual
control, you can also do this in
any recent version of Photoshop
using the “Photomerge” action
(File>Automate>Photomerge...)and
then adjust in the assembled file as
needed.
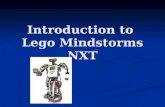
After building the combined image,
you then need to pass the file into
another piece of software that will
convert it into a cubemap, which is an
image format that provides 6 images
for each of a cube’s faces. When the
6 images of a cubemap are applied to
the proper interior faces of a cube and
viewed from the inside, the image will
appear seamless and undistorted.
The most versatile software package
for doing this is Pano2VR. Pano2VR
will allow for many input formats and
will export out each of the 6 images
needed to give you a full cubemap.
In Pano2VR, in the Input column on
the left, click “Select Input” and match
the input format to the combined
360° stitched image file created in the
previous steps.
Then in the Output column, click the
“New Output Format” dropdown and
make sure it’s on the “Transformation”
option.
In the Settings tab, change the “Type”
dropdown to “Cube Faces,” change
the “Face Names” dropdown to
“‘front’..’down’” and choose an image
size of at least 2048x2048.
Note that this resolution is
recommended for each face to
provide maximum pixel density in
Gear VR.
Under the “Output” section at the
bottom on the “Format” dropdown,
choose PNG (.png) to ensure minimal
compression artifacts.

Up Front Down Back
Left
Right
Creating Cube-Maps - Computer Generated ImageryCreating a cubemap from computer
generated images (CGI) is much more
succinct in procedure explaination
than with photography due to no
stitch lines and exposure being
uniform thanks to CG cameras not
being bound by physical properties of
lenses and image sensors.
Most CG shops should have no
problem rendering out a cubemap
from various professional software
solutions, but here is an example
anyway generated from 3DS Max :
V-Ray’s box camera option was used
to render and export this format
directly out from 3DS Max without
having to use any additional tools.
Note that the benefits of using pure
CGI for generating cubemaps aren’t
just limited to uniform exposure and
elimination of stitch lines, but that it
allows also for additional viewpoint
possiblities, re-exportation of
infinintely higher resolution cube faces
for future use in higher pixel density
display technology, exportation for
use on different geometry besides
that used for cube-maps, and even
stereoscopic rendering.