Correct Proper Time and Position Remove the Paradoxes in ...
19
Correct Proper Time and Position Remove the Paradoxes in Special Theory of Relativity Raimo Ylinen Systems Engineering Laboratory, University of Oulu,Faculty of Technology P.O.Box 4300 FIN-90014 University of Oulu, Finland January 9, 2017 Abstract Einstein’s Special Theory of Relativity (STR) for objects in inertial frames implies the existence of one-sided time dilation and length contraction between the coordinate systems moving with constant velocity relative to each other. On the other hand, by symmetry this situation should be two-sided resulting in a contradiction. An example of this is the famous Twin Paradox introduced by Langevin over 100 years ago. In this paper, the problem leading to the paradox has first been simplified so that some of the explanations especially based on the General Theory of Relativity, are eliminated. The resolution of this problem shows that proper times are the correct ones for time measurement. Then the original problem has been resolved by showing that the paradox is a consequence of the erroneous use of local coordinate systems and resulting local proper times. Thus the whole paradox is based on misunderstanding of mathematical models and, consequently, there is nothing paradoxical in this problem. The well-known Pole and Barn paradox has a similar resolution based on proper lengths. 1 Introduction The mathematical background of Einstein’s Special Theory of Relativity (STR) for objects in inertial frames is the use of Minkowski spaces for describing the space-time coordinates and Lorentz transformations between these. Within this structure the Maxwell equations, especially the speed of light in the vacuum, are invariants with respect to coordinates. The same holds for models of mechanics if some relativistic modifications are made to Newton’s laws. These invariances have often been explained so that the Lorentz transformations imply both time dilation and length contraction of the coordinates. In other words, if one coordinate system is moving with a constant velocity relatively to the second coordinate system, its time is running slower than the time of the second one but, on the other hand, the distances to travel are also shorter. A serious problem in this resolution found already by Albert Einstein himself in his 1905 paper [1], is that this situation is symmetric, i.e. the time of the second coordinate system should in turn run slower than the time of the first one. This is obviously impossible so that there is a logical contradiction. Einstein was also thinking the problem that if a clock takes a round trip, it will lose time compared to a clock staying in place, i.e. there arises so-called Net Proper Time Difference (NPTD). A famous application of this problem is the Twin Paradox introduced by Paul Langevin in 1911 [3]. Einstein thought first that the cause of the NPTD was the time dilation as a function of the relative speed. However, later he changed his opinion and in 1918 he published an explanation based on General Relativity [2]. Nevertheless, the first resolution explaining the NPTD by time dilation seems to be the most popular at least in the textbooks of physics. The resolutions are a little different but anyway, they somehow try to show that the situation is not really symmetric. In the Twin Paradox problem the symmetry is perhaps not so easily acceptable, but the original 1
Transcript of Correct Proper Time and Position Remove the Paradoxes in ...

Correct Proper Time and Position Remove the Paradoxes in
Special Theory of Relativity
Raimo YlinenSystems Engineering Laboratory,
University of Oulu,Faculty of TechnologyP.O.Box 4300 FIN-90014 University of Oulu, Finland
January 9, 2017
Abstract
Einstein’s Special Theory of Relativity (STR) for objects in inertial frames implies theexistence of one-sided time dilation and length contraction between the coordinate systemsmoving with constant velocity relative to each other. On the other hand, by symmetry thissituation should be two-sided resulting in a contradiction. An example of this is the famousTwin Paradox introduced by Langevin over 100 years ago. In this paper, the problem leadingto the paradox has first been simplified so that some of the explanations especially based onthe General Theory of Relativity, are eliminated. The resolution of this problem shows thatproper times are the correct ones for time measurement. Then the original problem has beenresolved by showing that the paradox is a consequence of the erroneous use of local coordinatesystems and resulting local proper times. Thus the whole paradox is based on misunderstandingof mathematical models and, consequently, there is nothing paradoxical in this problem. Thewell-known Pole and Barn paradox has a similar resolution based on proper lengths.
1 Introduction
The mathematical background of Einstein’s Special Theory of Relativity (STR) for objects ininertial frames is the use of Minkowski spaces for describing the space-time coordinates and Lorentztransformations between these. Within this structure the Maxwell equations, especially the speedof light in the vacuum, are invariants with respect to coordinates. The same holds for models ofmechanics if some relativistic modifications are made to Newton’s laws. These invariances haveoften been explained so that the Lorentz transformations imply both time dilation and lengthcontraction of the coordinates. In other words, if one coordinate system is moving with a constantvelocity relatively to the second coordinate system, its time is running slower than the time of thesecond one but, on the other hand, the distances to travel are also shorter. A serious problem inthis resolution found already by Albert Einstein himself in his 1905 paper [1], is that this situationis symmetric, i.e. the time of the second coordinate system should in turn run slower than thetime of the first one. This is obviously impossible so that there is a logical contradiction.
Einstein was also thinking the problem that if a clock takes a round trip, it will lose timecompared to a clock staying in place, i.e. there arises so-called Net Proper Time Difference (NPTD).A famous application of this problem is the Twin Paradox introduced by Paul Langevin in 1911[3]. Einstein thought first that the cause of the NPTD was the time dilation as a function of therelative speed. However, later he changed his opinion and in 1918 he published an explanationbased on General Relativity [2]. Nevertheless, the first resolution explaining the NPTD by timedilation seems to be the most popular at least in the textbooks of physics. The resolutions are alittle different but anyway, they somehow try to show that the situation is not really symmetric.In the Twin Paradox problem the symmetry is perhaps not so easily acceptable, but the original
1

symmetric time dilation problem cannot be solved by invoking the asymmetry. In the literature thishas usually been forgotten and only the Twin Paradox problem has been considered. However, thesymmetric problem indicates that there is something wrong with the assumption of the existenceof NPTD.
Recently the Natural Philosophy Alliance (NPA) published an open letter in the Internet [4] tothe Physics Community, where they pointed out that ”there are many conflicting opinions aboutthe resolution of the Twin Paradox among mainstream, relativist professors. Although the main-stream consensus is that the paradox is not a problem and as such has a definitive solution, thereis no agreement as to exactly what that solution is as the physics journals and textbooks are fullof conflicting solutions to this problem.” They also demanded that ”the mainstream physics com-munity select a single, definitive solution to this problem” and ” state which alternative solutionsare essentially equivalent to the chosen solution and which alternatives are deemed invalid.”
Although I don’t belong to the mainstream physics but to the systems and control theorycommunity, I will accept this challenge. As a system theorist I am experienced to use mathematicalmodels for describing the physical world and the choice of the coordinate system is always the firststep in modeling. It should, however, be remembered that even the models looking extremelyaccurate can never ensure that the real world is operating in the same way. In other words, thephenomena of nature do not depend on their mathematical models! Fortunately, in this case theproblem seems to be completely mathematical and does not need any physical interpretations.
To illustrate the problem, we first modify the setting leading to the paradox to the symmetricone and simplified so that some possible solutions, especially based on the General Theory ofRelativity, will be eliminated. The starting point for the resolution is:
• The problem is purely kinematic, i.e. only the positions and motions (velocities) of theobjects are considered.
• The framework for consideration is the kinematic part of the Special Theory of Relativity.
• The only interesting physical objects are the clocks and the yardsticks in the spaceships andon the Earth, even though there are also human beings present.
• The operation of the clocks and the yardsticks does dot depend on coordinate systems but forcomparisons of their readings they should be calibrated in the same fixed coordinate system.
Lorentz transformations mix the ordinary time and space coordinates, thus we need to forget theusual interpretation of these. Furthermore, the clocks and yardsticks do not necessarily measurethe coordinate times and positions, but possibly some combinations of them.
The symmetric problem setting shows clearly the guidelines for correct resolution but the originalproblem needs also some more detailed discussion concerning the use of local coordinate systems.We will show that the paradox is a consequence of the erroneous use of local coordinate systems andthe resulting concept of local proper time. Considering the problem only in one fixed coordinatesystem and using the correct proper time shows that there is not any NPTD and after the roundtrip the clocks have exactly the same reading.
We know that there are some experimental results supporting the existence of NPTD. As farwe know, the problem settings, however, are not purely kinematic but there also exist dynamicphenomena, e.g. gravity forces and other accelerations affecting the clocks. Therefore they shouldbe handled with certain reservations.
The basics of STR belong to the standard material of textbooks in modern physics (I personallyhave used the books [5], [6]) so that it is unnecessary to replicate them but some concepts importantfor understanding are defined here even though they are well-known to the Physics Community.To make the consideration illustrative, we will present three examples and describe the solutionsthoroughly by several figures.
2

2 Symmetric Twin Paradox Problem
Suppose that we have two identical spaceships and my identical twin sons Lauri and Jukka aretrained to pilots of these ships. The spaceships represent the ”newest achievable technology” sothat they can accelerate in 0.5 year to the speed 0.6c (the acceleration is about 1.1G) where c isthe speed of light in a vacuum. The braking efficiency is the same than the acceleration efficiency.Lauri and Jukka take off their ships into the space in the exactly opposite directions and after theinitial acceleration they travel 4.5 years. Then they start to brake, stop the ships, turn back andaccelerate so that after one year they are in the same position but coming back to the Earth. Ifthe acceleration and braking are supposed to be constant, the ships travel during these periods0.15 light years. Thus the ships are at a distance of 2.85 light years from the Earth and they havespent 6 years from the takeoff.
Both sons have similar timing clocks which they start at that moment. Alternatively, I couldsend at time 3.15 years from the takeoff by radio a starting command which the sons acknowledgeback to me. When I receive this after about 5.7 years from sending I could synchronize also myown timing clock in the way proposed by Einstein (1905) to the time 5.7 years/2=2.85 years.
When the sons arrive at the neighborhood of the Earth after 2.85/0.6 years=4.75 years accordingto my timing clock, they both send messages containing the readings of their timing clocks. Whatare the readings?
According to the velocity transformation of STR, Lauri is moving relatively to Jukka withvelocity (speed)
vJL =2× 0.6c
1 +(0.6cc
)2 ≈ 0.882c (1)
(the sign of velocity depends on the chosen coordinates but it is not important in this phase).
Because of time dilation, his clock should show to Jukka a reading which is
√1− (vJL/c)
2=
√1− 0.8822 ≈ 0.471 times Jukka’s reading.
On the other hand, the arrangement is symmetric with respect to Lauri and Jukka so that Jukkais moving relatively to Lauri with speed 0.882c and his clock should show a reading which is 0.471times Lauri’s reading. Both cases cannot be true!
The problem becomes even more complicated, if I take into account that the situation is sym-metric relatively to me. Both sons are moving with speed 0.6c relatively to me so that their clockreadings should be the same
√1− 0.62×4.75 = 0.8×4.75 = 3.8 years. Conversely, relatively to the
sons, I am also moving with speed 0.6c so that my clock reading should be less than the readingsof the sons. Is my clock reading 4.75 years correct, i.e. was the synchronization done correctly?
The readings of a clock are obviously unique and depend only on the coordinates where theclock has been calibrated. Therefore the only explanation for the contradictions above is that theclock readings are something else than the coordinate times. In what follows, we will discuss thismore formally. Before that we present the problem in the coordinate systems used in STR.
3 Coordinate Description
In the problem formulation above we used concepts like time, distance, velocity etc. and somenumerical values for them without any exact definitions. In fact, we implicitly assumed that wehad given some coordinate system as a reference frame. In STR, Minkowski spaces of coordinates(t, x, y, z) are used as coordinate systems and for inertial systems the coordinates are related toeach other via Lorentz transformations instead of Galilean transformations. To make the timecoordinate t comparable to the space coordinates it is usually replaced by ct, that is withoutconfusion called also time in what follows.
3

The Lorentz transformation from the coordinate system {(ct1, x1, y1, z1)} to the coordinatesystem {(ct2, x2, y2, z2)} to the direction of x-axis is given by
ct2x2y2z2
= γ(v12)
1 −v12c 0 0−v12c 1 0 0
0 0 1γ(v12)
0
0 0 0 1γ(v12)
ct1x1y1z1
= L(v12)
ct1x1y1z1
(2)
γ(v12) =1√
1−(v12c
)2 (3)
y and z coordinates do not change in this transformation so that if spatial movements only in x-direction are considered y and z coordinates can be canceled. This is a special type of Lorentztransformation because, in general, the direction of the movement could be taken arbitrary andfurthermore, sometimes also spatial rotations are included into the Lorentz transformations.
For simplicity we choose my coordinate system {(ctR, xR)} in such a way that the spaceships ofLauri and Jukka are assumed to move spatially on its x- axis to opposite directions with velocitiesvRL = 0.6c and vRJ = −0.6c. Using these velocities we can construct two other coordinate systems{(ctL, xL)} and {(ctJ , xJ)}[
ctLxL
]= γ(vRL)
[1 −vRL
c−vRL
c 1
] [ctRxR
]= L(vRL)
[ctRxR
](4)
[ctJxJ
]= γ(vRJ)
[1 −vRJ
c− vRJ
c 1
] [ctRxR
]= L(vRJ)
[ctRxR
](5)
These are denoted using subindexes L and R, and called the coordinate systems of Lauri andJukka, because they can be used as rest coordinates of their spaceships. However, this is done onlyfor convenience, because all coordinate systems above have been constructed and used by me asdifferent reference frames of the world. In fact, there is no need for separate observers (human orabstract) corresponding to each coordinate system, because only one observer is enough to use allcoordinate systems in question. More practically, using the modern technology we could realizethe whole problem automatically without any human involvement.
Nevertheless, in what follows the subindexes R,L,J are used in such a way that e.g. xRL meansthe position of Lauri (L) in my (Raimo, (R)) coordinate system.
The equations (4) and (5) can be used for studying the problem. However, sometimes it is easierto use the facts that the inverse of a Lorentz transformation is also a Lorentz transformation and,furthermore, the composition of two Lorentz transformations is a Lorentz transformation. Thus,for instance
L(vRL)−1 = L(−vRL) = L(vLR) (6)
and
L(vRL)L(vJR) = L
(vJR + vRL1 + vJRvRL
c2
)= L(vJL) (7)
The values of all time and space variables in the problem can be given in years and light years,respectively, so that these units have not been written in what follows.
We all are in rest in our own coordinate systems, i.e. for me xRR = 0, for Lauri xLL = 0 and forJukka xJJ = 0. The rendezvous means that then also xRL = xRJ = xLR = xLJ = xJR = xJL = 0.According to the Lorentz transformations above this can happen only when also ctRR = ctRL =ctRJ = ctLR = ctLL = ctLJ = ctJR = ctJL = ctJJ = 0. Therefore for studying the twin paradoxproblem using these three coordinate systems, only the initial events need to be calculated.
Denote the initial events in my coordinates by (ctRR0, xRR0), (ctRL0, xRL0) and (ctRJ0, xRJ0),in Lauri’s coordinates by (ctLR0, xLR0), (ctLL0, xLL0) and (ctLJ0, xLJ0), and finally in Jukka’s
4

coordinates by (ctJR0 ,xJR0), (ctJL0, xJL0) and (ctJJ0, xJJ0),respectively. According to the prob-lem formulation xRR0 = 0, xRL0 = −2.85, xRJ0 = 2.85. Putting these together with xLL0 = 0,xJJ0 = 0 to the equations (4) and (5) ctRL0, ctLL0, ctRJ0 and ctJJ0 can be solved resulting inctRL0 = −4.75, ctLL0 = −3.8, ctRJ0 = −4.75, ctJJ0 = −3.8. Finally, my own initial time is ob-tained by the synchronization ctRR0 = ctRL0 = ctRJ0 = −4.75. The movements in my coordinatesystem {(ctR, xR)} are depicted by Fig. 1.
Figure 1: Symmetric Twin Paradox in Raimo’s coordinates. Trajectories of Raimo (solid line),Lauri (dashed line), Jukka (dash-dotted line), and curve of proper time 3.8 years (dotted line).
For presenting the movements in Lauri’s coordinates {(ctL, xL)}, the initial events (ctLR0, xLR0)and (ctLJ0, xLJ0) are calculated using the Lorentz transformations (4) and (5) ctLR0 = −5.9375,xLR0 = 3.5625, ctLJ0 = −8.075, xLR0 = 7.125. In Jukka’s coordinate system {(ctJ , xJ)} the initialevents can be obtained directly by symmetry or using the Lorentz transformations ctJR0 = −5.9375,xJR0 = −3.5625, ctJL0 = −8.075, xJL0 = −7.125. Figs. 2 and 3 illustrate the situation.
Figure 2: Symmetric Twin Paradox in Jukka’s coordinates. Trajectories of Raimo (solid line),Lauri (dashed line), Jukka (dash-dotted line), and curve of proper time 3.8 years (dotted line).
5

Figure 3: Symmetric Twin Paradox in Lauri’s coordinates. Trajectories of Raimo (solid line),Lauri (dashed line), Jukka (dash-dotted line), and curve of proper time 3.8 years (dotted line).
Comparison of the numbers or figures above shows immediately that the coordinate times spentby me and my sons from the start to the rendezvous are different in different coordinate systems.The important question is, how these times are related to the clock readings, and furthermore,whether the clock readings are also different.
Remember that in the non-relativistic case a clock can be modeled simply by the time coordinate
dTcdt
= 1 or Tc(t)=Tc0 + t (8)
where Tc(t) is the reading at time t. In literature this has been applied also in the relativistic case,but the model is not correct which will be shown in what follows.
Of course, the model of a clock depends on the coordinate system but the operation itself doesnot, still less the clock operates differently in different simultaneous coordinate systems. As toldin the previous section, it operates only in the way according to the coordinate system where itsoperation has been calibrated. In our case we can suppose that the clocks are similar and calibratedbefore the takeoff in my coordinate system.
The paths of the spaceships are completely symmetric with respect to me so that the readingsof the clocks in the spaceships must be the same. The same reasoning even though not so clearlyapplies also to the comparison of my clock to my sons’ clocks. The fact that Lauri’s and Jukka’sclocks have the same reading even in both of their coordinate systems (Figs.2,3) implies that theclock readings must be invariant with respect to Lorentz transformations. We, however, don’tknow what this reading is.
If we look at Figs. 2,3 we see that there are two possible coordinate times, 3.8 and 8.075 yearsand in Fig. 1 one more, 4.75 years, but no one of these is invariant. This indicates, that thetime coordinate alone cannot be used as a model of a clock but the model must contain also thespace coordinates. An educated guess would be 3.8 years. If the reading would be 4.75 years,the comparison of Figs. 1,2 (or 3) and the use of symmetry between me and the sons leads to anambivalent situation, where two different coordinate times -4.75 and -3.8 years correspond to thesame reading 4.75 years of my clock. In the next section this is proven more formally.
6

4 Proper Time and Proper Position
Consider a set of coordinate systems (Minkowski spaces) {(ct, x)} obtained from each other throughLorentz transformations. As already told, the inverse of a Lorentz transformation is also a Lorentztransformation, and the composition of two Lorentz transformations is a Lorentz transforma-tion. This means that the set of Lorentz transformations determines an equivalence relation calledLorentz equivalence on the set of coordinate systems. In other words, two coordinate systems arecalled Lorentz equivalent if there is a Lorentz transformation between them. Furthermore, thisLorentz transformation is easily shown to be unique (if the direction is determined).
An interesting question related to the equivalence relations is, whether there exist so-calledcanonical forms for the Lorentz equivalence. The canonical form has the property that if there existtwo equivalent coordinate systems of the same canonical form, they should be equal. Unfortunately,in this case such coordinate systems cannot be found, but the only coordinate systems satisfyingthis requirement are the degenerated coordinate systems obtained by the limits
limv→c
L(v) and limv→−c
L(v) (9)
The functiond2(ct, x) = c2t2 − x2 (10)
called the squared distance(from the origin) is a complete invariant for the Lorentz equivalence, i.e.the distance of an event (ct, x) remains the same in Lorentz transformations. In the cone |ct| ≥ |x|the invariant distance can be used to define the concept of invariant proper time
cT = cT (ct, x) = ct
√1−
( xct
)2(11)
Correspondingly, in the cone |ct| ≤ |x| the distance defines the concept of invariant proper position
X = X(ct, x) = x
√1−
(ct
x
)2
(12)
The curves of constant proper time and proper position are hyperbolas depicted by Fig.4.
Trivially, cT = ct when x = 0 and the larger the ratio x/ct the smaller the proper time cT iscompared to the coordinate time ct. This is called the time dilation. However, for an arbitrary eventwith the corresponding proper time there exists an equivalent coordinate system where its propertime is equal to the coordinate time. For instance, take an event (ct12, x12) in a coordinate system{(ct1, x1)} with the proper time cT1 =
√1− (x12/ct12)2. In the equivalent coordinate system
{(ct2, x2)} obtained by Lorentz transformation L(x12/t12) the image of (ct12, x12) is (cT1, 0), i.e.there the coordinate time is equal to the proper time. Conversely, if (ct21, x21) in {(ct2, x2)} is theimage of (cT1, 0) in {(ct1, x1)}, its proper time is equal to cT1.
Correspondingly, for an event (ct13, x13) with the proper position X1 = x1√
1− (ct13/x13)2
there exists an equivalent coordinate system {(ct3, x3)} where the image of (ct13, x13) is (0, X1)and vice versa in a natural way. Again, the larger the ratio ct/x the smaller the proper positionX is compared to the coordinate position x. This is called the length contraction.
Note that our definitions of the proper time and the proper position as well as the time dilationand the length contraction are a little more general than the usual definitions in the literaturebecause our definitions do not need any explicit velocities. However, as shown above the definitionsare closely related and, in fact, our definitions can be derived also from the properties of Lorentztransformations. For instance, the proper time and the time dilation are defined by[
ct21x21
]= γ(v12)
[1 − v12c− v12c 1
] [cT10
]=
[γ(v12)cT1
−γ(v12) v12c cT1
](13)
resulting in
cT1 = γ(v12)−1ct21 = ct21
√1−
(v12c
)2(14)
7

Here cT1 is the proper time of (ct21, x21). Because
v12c
= − x21ct21
(15)
we obtain
cT1 = ct2
√1−
(− x21ct21
)2
(16)
Thus our definition leads to the same proper time than the definitions in the literature.
Correspondingly, the proper position is obtained from[ct31x31
]= γ(v13)
[1 −v13c−v13c 1
] [0X1
]=
[−γ(v13) v13c X1
γ(v13)X1
](17)
Hence the proper position of (ct31, x31) is
X1 = γ(v13)−1x31 = x31
√1−
(v13c
)2= x31
√1−
(−ct31x31
)2
(18)
The coordinate systems are illustrated by Fig. 4, where for simplicity (ct12, x12) and (ct13, x13) arechosen so that {(ct2, x2)} and {(ct3, x3)} are the same. Now we are ready to return to our twin
Figure 4: Curves of constant proper times and proper positions (dotted lines)
paradox problem. If we instead of coordinate times look at the proper times we see that Lauriand Jukka (actually their clocks) have used the same proper time 3.8 years in all three coordinatesystems. The curve of constant proper time 3.8 years is denoted in Figs. 1-3 by dotted blue lines.This means that if the clocks are modeled by the proper times,
dTcdT
= 1 or Tc(T (ct, x))=Tc0 + T (ct, x) (19)
there is no paradox .
There is, however, one problem left, namely the synchronization of my clock. In the problemformulation it was synchronized using the method proposed by Einstein. This leads to contradictingresults, i.e. at the rendezvous my clock has the reading 4.75 years and the others have the reading3.8 years. This indicates that also the synchronization should be based on the proper time insteadof the coordinate time. Unfortunately there is no simple method to do this, because in additionto the time interval given by one back and forth light or radio signal also the correct coordinate
8

is needed for calculation of the proper time. If it is not known, the second back and forth signalcould be used for its estimation.
So suppose that x1 and x2 are two sequential coordinate positions of the other spaceship mea-sured using the back and forth signals at the coordinate time instants ct1 and ct2 which are themiddle points of the time intervals between sending and receiving time instants. The values ofthese times are unknown but the time interval ct1 − ct2 can be calculated from the time intervalbetween the sending instants. Provided that the events (ct1, x1) and (ct2, x2) are on the samestraight line starting from the origin,
x2ct2
=x1ct1
(20)
which results in
ct1 =c(t2 − t1)x1x2 − x1
(21)
Finally the corresponding proper times are obtained, e.g.
cT1 = ct1
√1−
(x1ct1
)2
(22)
This can be used for synchronization of the clocks, especially if the clocks in the spaceships arestarted from the first command.
Note that if the condition (20) does not hold, the result (22) is not the correct proper time butthe local proper time at the intersection of the spaceship’s trajectory and my trajectory.
The resolution of the synchronization problem gives a new definition for simultaneity: two eventsare simultaneous if their proper times are the same.
The synchronization problem is also related to the timing of the operation of the spaceshipsbefore the return travel. In the problem formulation the timing was given using my coordinatetimes but the clocks in the spaceships are showing their proper time. In order to transformthe coordinate times to the proper times, the positions of the spaceships are needed. An otherpossibility is to send control commands from the Earth in the same way than the starting commandof the timing clocks.
5 Local Proper Time
The proper time and proper position are defined on the separate cones of the coordinate system,so that they cannot be used simultaneously. This is not a very serious drawback, because they areneeded for studying different types of phenomena and furthermore, the coordinate systems can belocated so that the events to be studied are ensured to stay inside the cones |ct| ≥ |x| or |ct| ≥ |x|depending on whether we are interested in time or space behavior, respectively, This for instancemeans that for studying the motion of a particle we need to translate the coordinate system toinclude its initial position into the positive cone ct ≥ x. The proper time and the proper positionare nonlinear functions of the coordinate time and the coordinate space, so that the translationof the coordinate systems affects them nonlinearly. Let (ct1, x1) be an event in the coordinatesystem {(ct, x)} and choose the corresponding events from the other coordinate systems Lorentzequivalent to {(ct, x)} so that they are images of (ct1, x1). Because Minkowski spaces and Lorentztransformations are linear, the translated coordinate systems like
{(c∆t,∆x)} = {(ct, x)} − (ct1, x1) (23)
are also Lorentz equivalent to each other, but of course not to the original ones. Furthermore, then
d2(c∆t,∆x) = c2∆t2 −∆x2 (24)
9

is a complete invariant for their equivalence. Thus we can define also their proper time
∆T = ∆T (c∆t,∆x) = c∆t
√1− ∆x2
(c∆t)2(25)
provided that |c∆t| ≥ |∆x| This is called the local proper time at (ct1, x1) of the original coordinatesystems {(ct, x)}. Note that the translated coordinate system can be located to an arbitrary eventof the original coordinate system {(ct, x)} which means that local proper time can be defined eventhough the original proper time does not exist.
The situation is depicted by Fig.5.
Figure 5: Translated coordinate system with local proper time (dashed line) compared to originalproper time (dotted lines)
If |ct1| ≥ |x1| , |ct2| ≥ |x2| the local proper time can be compared to the change of the propertime in the original coordinate system
c∆T = cT2 − cT1 = ct2
√1− x22
(ct2)2− ct1
√1− x21
(ct1)2(26)
Now the squares of the times ∆T and ∆T are
(c∆T )2 = c2∆t2 −∆x2 = c2(t2 − t1)2 − (x2 − x1)2 (27)
(c∆T )2 = (cT2 − cT1)2 =
(√c2t22 − x22 −
√c2t21 − x21
)2
(28)
and further their difference is
(c∆T )2 − (c∆T )2 = 2(ct1ct2 − x1x2)
(1−
√1− (ct2x1 − ct1x2)2
(ct1ct2 − x1x2)2
)≥ 0 (29)
Thus|c∆T | ≥
∣∣∣cT ∣∣∣ (30)
i.e. the absolute values of the local proper times are always less than or equal to the correspondingchanges of the original proper time. They are equal if
x1ct1
=x2ct2
(31)
10

which means that the events (ct1, x1) and (ct2, x2) are on the same straight line starting from theorigin. This emphasizes the importance of the correct location of the chosen coordinate systeme.g. for studying the motion of particles.
The consideration above can be applied also to the infinitesimal changes
cdT = cdt
√1−
(dx
cdt
)2
(32)
cdT =c2tdt− xdx√
(ct)2 − x2= cdt
ct− xcdxdt
cT(33)
which satisfy
|cdT | ≥∣∣∣cdT ∣∣∣ (34)
with equality holding whendx
cdt=x
ct(35)
In particular, if we consider a motion of a particle it would be useful to transfer the coordinatesystem together with the particle along its trajectory. For example, consider a trajectory from(0, 0) to (ctf , xf ). At each event (ct, x(t)) on the trajectory
cdT = cdt
√1−
(v(t)
c
)2
(36)
cdT = cdtct− x(t)v
c
cT (ct, x(t))(37)
Integrating the local proper times over the whole trajectory gives
cT (ctf , xf ; v) = c
tf∫0
√1−
(v(t)
c
)2
dt (38)
The local proper times are always less than or equal to the change of the original proper time sothat obviously this holds also to their ”sum” cT . In the literature cT has been used to ”prove”that different trajectories from one event to another need different proper times. It is, however,important to notice that cT is not any kind of proper time in the original coordinate system, neitherin any other single coordinate system but has been calculated in an infinite number of separatetranslated coordinate systems.
In spite of this, it is interesting to know, how cT , in particular its maximum value over allpossible trajectories from (0, 0) to (ctf , xf ) is related to the change of the original proper time.The question was already discussed in a finite difference case of Fig.5 but the problem can besolved also in the continuous case.
So consider the following optimization problem:
maxv
cT (ctf , xf ; v) (39)
dx
dt(t) = v(t), x(0) = 0, x(tf ) = xf (40)
|v(t)| ≤ c (41)
The problem can be solved e.g. by using the Pontryagin’s Maximum Principle. The result is thatthe optimum trajectory is linear given by the constant velocity
vo =xftf
(42)
11

and the maximum value is equal to the proper time at (ctf , xf )
maxv
cT (ctf , xf ; v) = cT (ctf , xf ; vo) = ctf
√1−
(vo
c
)2
= cT (ctf , xf ) (43)
Note that the optimal velocity vo is equal to the average velocity
vo =1
tf
tf∫0
v(t)dt (44)
Also the minimum of cT can be solved and it is
minvcT (ctf , xf ; v) = 0 (45)
obtained by all ”zigzag” trajectories from (0, 0) to (ctf , xf ) satisfying
|v(t)| = c (46)
6 Proper Velocity
Note that the velocities of motions in the problem formulation and the Lorentz transformationwere defined using the coordinate changes
v(t) =dx
dt(t) (47)
However, if the coordinate time is replaced by the proper time taking the time dilation intoaccount, we get a candidate for (relativistic) proper velocity
V (T ) =dx
dT(T ) =
dx
dt(t)
c2T
(c2t− x(t)v(t))= v(t)
√1−
(x(t)ct
)2(
1− x(t)ct
v(t)c
) (48)
In literature, instead, a local proper velocity
V (dT ) =dx
dT(dT ) = v(t)
1√1−
(v(t)c
)2 (49)
is proposed.
In the case of motion starting from the origin with constant velocity
v(t) = v =x(t)
t(50)
these are the same.
V (dT ) = V (T ) = v1√
1−(vc
)2 (51)
Both these velocities have the drawback that
V (T )→∞ and V (dT )→∞ when v(t)→ c (52)
which, however, is not against the basic property of STR that the speed of moving particles cannotexceed the speed of light in a vacuum, because then the proper times T → 0 and dT → 0
12

Nevertheless, the proper velocities are better to be defined using both the proper position andthe proper time taking both the length contraction and time dilation into account. The fact thatthese have been defined on the separate cones does not cause any problem, because the positionx(t) can be thought to be measured by a stick of the length x(t) which has been moved from theorigin to the x-direction with velocity x(t)/t. The movement of the stick from the position, whereits front end is at x(t), to the position, where its rear end is at x(t), is depicted by Fig. 6.
The situation could be expressed also so that the definition of the proper position is extendedto the whole time-space area so that in the cone |ct| ≥ |x|
X(ct, x) = X(ct′, x) = X((xt
)2ct, x) = x
√1−
( xct
)2=x
tT (ct, x) (53)
where
ct′ =( xct
)2ct (54)
Note, however, that this extension is not Lorentz invariant.
Figure 6: Construction of proper position needed for definition of proper velocity.
Then the local proper velocity can be defined as
V (dT ) =dX
dT(dT ) =
dx
dt(t)
√1−
(dxcdt (t)
)2√1−
(dxcdt (t)
)2 = v(t) (55)
where
X = dX(
(dx
cdt
)2
dt, dx) = dx
√1−
(dx
cdt
)2
(56)
Furthermore, the proper velocity itself is
V (T ) =dX
dT(T ) = v(t)
1− 2(x(t)ct
)2(
1− x(t)ct
v(t)c
) + c
(x(t)ct
)3(
1− x(t)ct
v(t)c
) (57)
Again, if
v(t) = v =x(t)
t(58)
thenV (T ) = V (T ) = v (59)
13

7 Original Twin Paradox
Consider next the Twin Paradox Problem in its original form where the travels in both directionsare taken into account. So suppose that we have a super powerful spaceship which can accelerateto its cruising speed 0.6c as well as to decelerate to zero in a very short time compared to itsnormal traveling times. This generates huge G-forces but fortunately Lauri and Jukka are alreadyexperienced astronauts trained to tolerate these. We have also two similar timing clocks, the firstone has been taken by Lauri into the spaceship and the second one has been left to me and Jukkaon the Earth.
Suppose then that we start both clocks and take off the spaceship into the outer space. In orderto compare the experiment to the symmetric case presented in the earlier sections, the spaceshiphas been programmed to travel 4.75 years in my and Jukka’s coordinate system whereafter it turnsback and comes to the Earth using the same time. Then we compare the readings of the clocks.Obviously our clock has the reading 9.5 years and we have aged the same amount of years butwhat is the reading of the clock in the spaceship and Lauri’s age?
The textbooks of physics are full of different kind of ”proofs” that the reading must be√
1− 0.62×9.5 = 0.8× 9.5 = 7.6 years! However, we could as well consider the problem using any coordinatesystem which is fixed to the spaceship. Remember that the problem is purely kinematic so thatwe can use any set of Lorentz equivalent coordinate systems even though they are moving withrespect to some other set of coordinate systems. Now the situation is symmetric with the originalone so that my clock should show the reading which is
√1− 0.62 = 0.8 times the reading of the
clock in the spaceship. This is paradoxical! The most common explanation for the acceptanceof this paradox seems to be that the situation is not symmetric because the spaceship changesits coordinate system at the turning point (how?). This is a part of the correct solution but theresulting time is not correct! We must remember that the comparisons of the clocks should be donein the same coordinate system.
The problem can again be considered in three Lorentz equivalent coordinate systems. The firstone is my own or Jukka’s coordinate system denoted by {(ct0, x0)}, the second one, Lauri’s firstcoordinate system {(ct1, x1)} is moving to the same direction than the spaceship after takeoff withthe velocity 0.6c. The third one is {(ct2, x2)} moving to the opposite direction and called Lauri’ssecond coordinate system even though it is not his rest coordinate system. At the beginning thespaceship is supposed to be at the origin (0,0). Note that the problem could be considered also inthe same way as the symmetric case, i.e. so that the rendezvous takes place at the origin.
Figs. 7-9 illustrate the trajectories in these three coordinate system. As seen the proper timefrom the beginning to the turning point is 3.8 years and to the end 9.5 years which means thatthe backward travel takes the proper time 5.7 years. In the literature the proper time has beencalculated erroneously using the local proper times (34), i.e. changing the coordinate system at theturning point to the local one. This gives the wrong result
cT (ctf , xf ; v) = 4.75√
1− 0.62 + 4.75√
1− (−0.6)2 = 3.8 + 3.8 = 7.6 (60)
leading to contradiction.
As told above, the problem can also be considered using the coordinate systems fixed to thespaceship. Figs. 10-12 illustrate this in three coordinate systems, Lauri’s coordinate system{(ct′0, x′0)}, Jukka’s first coordinate system {(ct′1, x′1)} and Jukka’s second one {(ct′2, x′2)} corre-sponding to the coordinate systems in Figs. 7-9. Comparison of the figures shows that the TwinParadox Problem is also symmetric and the proper times are exactly the same in both sets ofLorentz equivalent coordinate systems.
The main result, however, is that the twins are exactly as old when they meet againeven though the other one has traveled in the outer space .
14

Figure 7: Original Twin Paradox in Jukka’s coordinates. Trajectories of Jukka (solid line) andLauri (dashed line), and curve of proper time 3.8 years (dotted line).
Figure 8: Original Twin Paradox in Lauri’s first coordinates. Trajectories of Jukka (solid line),Lauri (dashed line), and curve of proper time 9.5 years (dotted line).
8 Pole and Barn Paradox
An other well-known paradox in STR is the Pole and Barn Paradox. In this problem we havea small barn with both ends open and a longer pole. Suppose that their lengths are 4 m and5 m, respectively. Because we are familiar with STR, we know that if we run carrying the poleinto the barn at speed high enough, there is a time instant at which the pole fits completely intothe barn. According to the length contraction, the speed 0.6c is enough resulting in the length5√
1− 0.62m = 4m . On the other hand, the situation is symmetric, i.e. the barn is approachingthe pole at speed 0.6c which means that its length will be contracted to 4
√1− 0.62m = 3.2m
so it is impossible for the 5 m long pole to be contained by the barn. There is again a logicalcontradiction!
15

Figure 9: Original Twin Paradox in Lauri’s second coordinates. Trajectories of Jukka (solid line),Lauri (dashed line), and curves of proper times 3.8 and 9.5 years (dotted line).
Figure 10: Original Twin Paradox in Lauri’s coordinates. Trajectories of Jukka (solid line), Lauri(dashed line), and curve of proper time 3.8 years (dotted line).
Like the Twin Paradox, this paradox has also got in the literature different kind of explanations.However, if we consider the problem using the proper lengths instead of the coordinate lengths,there does not exist any contradiction but the pole fits into the barn in both coordinate systems.The proper length here means the difference of the proper positions of the front and the rear ends.Fig.13 illustrates the problem in the barn’s coordinate system {(ct0, x0)}. The pole and the barnare described there at the instant where the rear end of the pole is at the front door of the barnand the movements of the pole and the barn from the instant where the front end of the polereaches the front door are described by dashed lines. Both the pole and the barn have the properlengths X = 4m. In Fig.14 the same situation has been presented in the Lorentz equivalent pole’scoordinate system {(ct1, x1)}. The proper lengths are, of course, the same X = 4m. Thus theuse of the correct proper positions proves that there is not any logical contradictionin the Pole and Barn Paradox problem.
16
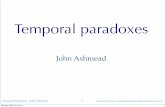
Figure 11: Original Twin Paradox in Jukka’s first coordinates. Trajectories of Jukka (solid line),Lauri (dashed line), and curve of proper time 9.5 years (dotted line).
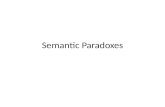
Figure 12: Original Twin Paradox in Jukka’s second coordinates. Trajectories of Jukka (solid line),Lauri (dashed line), and curves of proper times 3.8 and 9.5 years (dotted lines).
9 Concluding Remarks
In this paper, we have modified or simplified the Twin Paradox problem so that some of thepossible solutions, especially based on the General Theory of Relativity are not possible. Thisproblem has a simple solution based on the use of proper times instead of coordinate times fortime measurement. Then we have ”resolved” the original problem by showing that the paradoxis a consequence of the erroneous use of local coordinate systems and the resulting of local propertimes. Considering the problem only in one fixed coordinate system and using the correct propertime shows that there is not any Net Proper Time Difference (NPTD). This means that after the
17

Figure 13: Pole and Barn Paradox. Pole (thick line), barn (narrow rectangle), and curve of properposition 4 m in barn’s coordinate system
Figure 14: Pole and Barn Paradox. Pole (thick line), barn (narrow rectangle), and curve of properposition 4 m in pole’s coordinate system
round trip the clocks have exactly the same proper time reading and the twins have been agedexactly the same amount of time.
Also the correct consideration of the well-known Pole and Barn Paradox showed that thereis nothing paradoxical either in this problem. In this case the yardsticks used for the lengthmeasurements give the proper lengths instead of the coordinate lengths. Hence both well-knownparadoxes are based on misunderstanding of the mathematical models. Thus both Twin Paradoxand Pole and Barn Paradox are not real paradoxes in the Special Theory of Relativity
This means that the Special Theory of Relativity (STR) is consistent at least with respect tothese kinematic problems. However, in STR the Newton’s dynamics has been modified to the
18

relativistic form using local proper times instead of coordinate times. We have shown in thispaper that these coincide with the correct proper time only for motions with a constant velocity.Therefore the generalization should be checked carefully and possible errors caused by the use oflocal coordinate systems need to be corrected.
10 Acknowledgement
I would like to thank my twin sons Lauri and Jukka for participating to these dangerous explo-rations and for taking the risk that after them nothing is anymore the same.
References
[1] Einstein, A. (1905). On the Electrodynamics of Moving Bodies. Annalen der Physik, Ser. 4 17pp. 891-921.
[2] Einstein, A. (1918). Dialog about objections against the theory of relativity. Die Naturwis-senschaften 48 pp. 697-702.
[3] Langevin, P.(1911). The Evolution of Space and Time. Scientia 10, pp.31-54.
[4] Natural Philosophy Alliance (2010). An Open Letter to the Physics Community - 11/14/10The Twin Paradox. http://twinparadox.net/, 26 January 2011, at 11:01:16.
[5] Tipler,P.A., Llewellyn, R.A. (1999). Modern Physics, Third Edition. W.H. Freeman and Com-pany, p. 658+6 Apps.
[6] Maalampi,J., Perko,T. (2006). Short Introduction to Modern Physics, 4th edition,(in Finnish).Limes, p.255 .
19