Copy of Programmable Logic Contollers
80
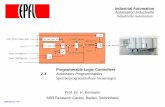
The figure shows a seven level hierarchy in which levels 1–3 are the supervisory levels and levels 4–7 are the information levels. The top management system devises plant optimising control strategies and level 2 deals with the optimum strategies for efficient production. Level 3 looks after the overall supervision of a process. The field instruments, i.e., sensors and actuators (at level 7) send their information through a process bus and/or device bus (at level 6) and Local Area Network (at level 5) to the information network (at level 4). This information is passed on to levels 3, 2 and 1 for final control of the overall plant. In this chapter, levels 4-7 have been dealt with since the supervisory levels are dependent on the information levels for the efficient operation of the plant. 6.2 Evolution of Industrial Control Process Industrial process control has evolved through hteh developments of direct Digital Control (DDC), Distributed Control Systems (DCS) and Field Control Systems (FCS). In all of them, PLC is the main component for control system logic implementation. In every step of the evolution, the control of the process has moved closer to the sensors and actuators. Fig. 6.2 shows DDC. Fig. 6.2 Evolution of Control Process
-
Upload
sunil-singh -
Category
Documents
-
view
39 -
download
6
Transcript of Copy of Programmable Logic Contollers

The figure shows a seven level hierarchy in which levels 1–3 are the
supervisory levels and levels 4–7 are the information levels. The top
management system devises plant optimising control strategies and level 2
deals with the optimum strategies for efficient production. Level 3 looks after
the overall supervision of a process. The field instruments, i.e., sensors and
actuators (at level 7) send their information through a process bus and/or
device bus (at level 6) and Local Area Network (at level 5) to the information
network (at level 4). This information is passed on to levels 3, 2 and 1 for final
control of the overall plant. In this chapter, levels 4-7 have been dealt with since
the supervisory levels are dependent on the information levels for the efficient
operation of the plant.
6.2 Evolution of Industrial Control Process
Industrial process control has evolved through hteh developments of
direct Digital Control (DDC), Distributed Control Systems (DCS) and Field
Control Systems (FCS). In all of them, PLC is the main component for control
system logic implementation. In every step of the evolution, the control of the
process has moved closer to the sensors and actuators. Fig. 6.2 shows DDC.
Fig. 6.2 Evolution of Control Process
DCS and FCS in which the following functions occur: (i) In a DDC system a
Proportional Integral Differential (PID) function is executed I the primary
computer, and analog signals are separately transmitted to the sensor and
actuator (S & A) in the field. (ii) In a DCS, a digital signal bus is used through
which digital signals are allowed to pass to a single PID controller in the field
and then analog signals are sent to individual S & A. (iii) In an FCS, digital
signals are passed to the field, where there is a digital signal bus, from where
individual S & A are provided with PID controller through which digital signals
can pass.
The control function executors are thus moved nearer the sensors and
actuators in the field. The control functions are in fact executed by PLCs. This
movement of control process, reduces wiring, aids in troubleshooting and

decreases maintenance costs of an industrial network, thus enhancing the
overall reliability of a process.
In this control and automation process, signal communication and
networking play the most vital role. This chapter deals with different generalized
industrial communication and networking systems. Since in general, in a plant
the host control station is at a long/medium distance from field devices, serial
communication is preferred to parallel communication. Keeping this in view,
serial communication techniques have been discussed rather more elaborately
than parallel communication.
6.3 Types of Communication Interface
Communication interfaces are categorized by their data handling
capacity and their ability to handle single or multiple devices. Different types of
communication interface are shown in Fig. 6.3
Fig. 6.3 Different Types of Communication Interface
6.4 Types of Networking Channels
There are two basic types of networking channels, namely, physical
channels and logical channels.
(a) Physical channels: In this case, two nodes are physically connected by
a channel. This channel may be a twisted pair of wires, coaxial cable,
optical fibre etc. The general characteristics of physical channels are low
speed and low cost hence, they are preferred for short distance
communication.
(b) Logical channels: If the nodes in a network are not connected
physically, the channel is called a logical channel. A microwave link and
a satellite link are examples of al logical channel. It is much faster and
costlier than a physical channel and hence is mainly used for long
distance communication.
6.5 Parallel Communication Interface

Parallel communication requires handshaking and transmits data one
byte (8 bits) at a time. When data are transferred from the host processor to a
peripheral device, the following steps take place:
The host sets a bit on the bus, signaling to the peripheral that a byte of
data has been sent.
The peripheral receives data and sets a bit on the bus, signaling to the
host that data have been received.
Parallel bus structures include IEEE-488, IBM PC, VME, MULTIBUS, Q
and STD. IEEE-488 is extensively used for instrument interfacing.
6.5.1 IEEE-488 Bus
The IEEE-488 bus was developed to connect and control programmable
instruments, and to provide a standard interface for communication between
instruments from different sources. Originally developed by Hewlett-Packard,
the interfacing technique gained popularity in industry. Afterwards the IEEE
committee renamed it General Purpose Interface Bus, (GPIB). The IEEE-488
interface system consists of 16 signal lines and 8 ground lines. The 16 signal
lines are divided into 3 groups, namely, 8 data lines, 3 handshake lines, and 5
interface management lines.
Any instrument can be used with the IEEE-488 specification, because it
says nothing about the function of the instrument itself, or about the form of the
instrument’s data. Rather, the specification suggests that the instrument should
be interfaced, to make it compatible with the bus. The structure of the IEEE-488
is shown in Fig. 6.4.
Fig. 6.4 Structure of IEEE-488 (GPIB)
6.5.2 Devices Useable with IEEE-488
There are basic three types of devices that can be sued with the IEEE-
488. These are shown in Fig. 6.5.
Fig. 6.5 Classification of Devices Useable with the IEEE-488

As shown in the figure, there are three types of devices that can be
connected to the IEEE-488 bus, namely, listeners, talkers and controllers.
Some devices include more than one of these functions. The standard allows a
maximum of 15 devices to be connected on the same bus. A minimum system
consists of one controller and one talker or listener device.
It is possible to have several controllers on the bus but only one may be
active at any given time. The active controller may pass control to another
controller, which in turn can pass it back to another controller. The system
controller may optionally pass control to another controller, which then
becomes the active controller. A talker transmits data on to the bus following an
instruction. The controller can set up a talker and a number of listeners so that
it is possible to send data between the devices.
The data lines DIO-1 through DIO-8 are used to transfer addresses,
control information and data, the formats for which are defined by the IEEE-488
standard.
6.5.3 Handshaking Process
There are three handshake lines, as shown in Table 6.1, which control
the transfer of message bytes among the devices and from the method for
acknowledging the transfer on data. This handshaking process guarantees that
the bytes on the data lines are sent and received without any transmission
errors.
Table 6.1 Details of Handshaking Lines
Name Description Function
NRFD Not Ready
For Data
The NRFD handshake line is asserted by a listener to
indicate that it is not yet ready for the next data or
control byte. It is to be noted that the controller will not
see NRFD released (I.e., ready for data) until all devies
have released it.
NDAC Not Data
Accepted
The NDAC handshake line is asserted by a listener to
indicate it has not yet accepted the data or control byte
on the data lines. It is to be noted that the controller will
not see NDAC released (i.e., data accepted) until all
devices have released it.
DAV Data Valid The DAV handshake line is asserted by the talker to

indicate that a data or control byte has been placed on
the data lines and has had the minimum specified
stabilizing time. The devices can now safely accept the
byte.
The handshake process is shown in fig.6.6 in the form of a flowchart.
6,5.4 Interface Management Lines
There are five-interface management lines to manage the flow of control
and data bytes across the interface. These are summarized in Table 6.2
Table 6.2 Details of Interface Management lines
Name Description Function
ATN Attention This signal is asserted by the controller to indicate that it
is placing an address or control by the on the data bus.
ATN is released to allow the assigned talker to place
status or data on the date a bus. The controller regains
control by reasserting ATN: this is normally done
synchronously with the handshake to avoid control
between control and data bytes.
EOI End of
Identify
This signal has two uses. A talker may assert EOI
simultaneously with the last byte of data to indicate end-
of-data. The controller may assert EOI along with ATN
to initiate a parallel poll. Although many devices do not
use parallel poll, devices should sue EOI to end
transfers.
IFC Interface
Clear
This signal is asserted only by the system controller in
order to initialize all device interfaces to a known state.
After releasing IFC, the system controller is the active
controller.
REN Remote
Enable
Only the system controller asserts this signal. Its
assertion does not place devices into remote control
mode: REN only enables a device to go into remote
mode when addressed to listen,

SRQ Service
Request
This is like an interrupt: it may be asserted by any
device to request the controller ot take some action. The
controller must determine which device is asserting
SRQ by conducting a serial poll. The requesting device
releases SRQ when it is polled.
Fig. 6.6 flowchart showing the Handshaking process
6.6 Serial Communication Interface
In serial transmission, one bit follows another and hence one
communication channel is required to establish communication between two
devices.
6.6.1 Balanced and Unbalanced Systems
A serial communication interface requires two conductors to transmit
each signal. If the return wire is grounded and the information is sent by putting
absolute voltage on the signal wire (+10V or –10V for instance) then the
transmission is said to be unbalanced. It is not the fastest way of using the two-
wire channel. If the voltage put on the signal wire is only positive (or only
negative) the signaling is implore. If both positive and negative are used it
bipolar.
The performance of a channel and the speed of communication can be
significantly increased by two methods. The first way is to terminate the two-
wire path correctly to avoid earth-return. In the second method, signals can be
driven on both wires, instead of using an earth-return path and driving only one
wire I an unbalanced fashion. For example, the true signal might be +5V on
one wire and –5V on the other. The false signal would be the reverse, -5V and
+5V respectively. (This allows a shock wave to be generated that can be
detected more rapidly and followed more closely by the next bit).
The choice between unbalanced and balanced transmission lines is an
important consideration when selecting a data communications system. The
balanced transmission line permits a higher rate of data transfer over longer

distances. The differential method of data transfer is preferable in industrial
applications where noise can be a major problem. The disadvantage is that a
balanced system requires two conductors for every signal.
The successful transfer of voltage signals across two conductors in the
presence of noise is based on the assumption that the conductors have similar
characteristics and will be affected equally by noise and voltage drops. It does
not mean that noise does not exist in the balanced differential system. The
voltages on both conductors should rise and fall together, and the differential
voltage should remain the same.
6.7 Communication Mode
In any communications link connecting two devices, data can either be
sent in one of three communications modes:
Simplex
Half duplex
Duplex
6.7.1 Simplex Mode
The simplest of serial links is called simplex or channel connection. It
provides a single path in one direction only and involves a driver circuit at one
end (Tx) and a receiver circuit at the other (Rx) as shown in Fig. 6.7. Simplex
mode is of limited interest in an industrial communications system since
feedback from the instrument is essential to confirm whether the action
requested has indeed occurred or not.
Fig. 6.7 Simplex Mode of Communication
6.7.2 Half Duplex Mode
Half duplex communication occurs when data flows in both direction; but
in only one direction at a time as shown in Fig. 6.8. Half duplex communication
is provided by the RS-485 physical standard where only one station can
transmit at a time.

Fig. 6.8 Half Duplex Mode of Communication
6.7.3 Full Duplex Mode
In a full duplex system, the data can flow in both directions
simultaneously. Examples of hardware standards supporting full duplex are the
physical standard EIA-232E, sometimes referred to as RS-232C.
In duplex transmission shown in Fig. 6.9, a copy of any byte received is
sent back to the sender to verify that it was sent and received correctly.
Fig. 6.9 Full Duplex Mode of Communication
6.8 Synchronisation and Timing in Communication
A number of techniques exist to ensure that a receiving station reads
data at the correct times. As far as binary signaling is concerned, there are four
basic methods to synchronise reception with transmission.
1. Synchronous transmission – with an explicit clock
2. Enchronous transmission – with an embedded clock
3. Isochronous transmission – with two similar clocks
4. Asynchronous transmission – synchronizing without a clock
6.8.1 Synchronous Transmission
This type of transmission uses a clock signal produced by the transmitter
and sent along a separate channel in parallel with the data channels. Fig. 6.10
shows a changing data stream with the clock (option A) being true if the data is
valid and false if it is changing.
Fig. 6.10 Synchronous Data Transfer
This is a simple system, but the clock signal has to change twice as fast
as the maximum rate of change of data. Option B uses a single edge to make a
point where data are known to be valid. This is called transition clocking.

Synchronous transmission is fast but channel efficiency is 50%. It is used in
high speed local area networks (10 Mbps or higher).
6.8.2 Enchronous Transmission
The same total efficiency can be achieved by simply changing the timing
and data information on a single channel. This embeds the clock into the data
giving enchronous transmission. This is done by methods called phase
encoding, modified frequency modulation etc. They employ clock edges at
regular times between each data time but differ in the method used to
determine whether the data is zero or one. The various methods used for this
purpose are the state, change or absence of change, or direction of change.
There is a maximum of two edges per data bit (minimum of one) and so the
efficacy on the single channel is only 50%. The data is transferred at half the
rate of that of synchronous transmission but only one channel is required and
there is no skew problem. These techniques are common for magnetic tape
and disc encoding as well as LAN.
6.8.3 Isochronous Transmission
In isochronous data transmission, the receiver is assumed to have a
local clock running with 10% accuracy of that of the transmitter. With this
addition, the amount of synchronization carried in a channel can usually be cut
down to 20%. Fig. 6.11 shows isochronous data transfer. Since both
synchronous and enchronous methods have given up 50% of their available
bandwidth in carrying synchronization, this method enhances its efficiency.
Fig. 6.11 Isochronous Data Transfer
6.8.4 Asynchronous Transmission
An asynchronous point-to-point transfer control needs two channels in
addition to the data channels as shown in Fig. 6.12.
Fig. 6.12 Asynchronous Data Transfer
The sequence of action starts with the transmitter waiting until the
receiver indicates on its Receiver Ready (RR) channel that it is ready to receive
as at (1) as in Fig. 6.12. The transmitter puts out new data and then asserts

that they are valid on its Transmitter Data Valid (TDV) channel as at (2), in Fig.
6.12. The receiver may take whatever time it needs to take the data, and then
indicates it has done so by lowering its RR channel signal as at (3). This also
indicates that the receiver is not ready to accept another data item as it still
handling the data it has just taken. The transmitter then removes its data,
asserting that it is not longer valid, by lowering the signals on its DV channel as
at (4). The whole cycle then repeats at whatever rate the receiver will accept
and the transmitter will run. The structure of valid data is shown in Fig. 6.13.
Fig. 6.13 Structure of Valid Data
The different parts of data carry the following indications:
Before >> this is a period when no bit is being sent and the line is true
Start >> a single bit
Data >> bit (01001000)
Parity >> even parity
Stop >> one or two stop bits can be used
Idle >> a period of time when limit is true before the next byte
The sending and receiving computers must know what these settings
are in order to properly receive and decode the data. The transmission speed is
the maximum number of bits that can be sent per second. The baud rate
includes the start, parity and stop bit.
For example, a 9600-baud transmission of data would transfer
9600/1+8+1+2 = 800 bytes per second. Lower baud rates are 120k, 300k, 1.2k,
2.4k and 9.6k. Higher speeds are 19.2k, 28.8k and 33.3k.
6.9 Comparison between Synchronous and Asynchronous Transmission
Since synchronous and asynchronous transmission methods are
commonly used, a comparative study of their performances is given in Table
6.3.
Table 6.3 Comparison between Synchronous and Asychronous
Transmission
Synchronous Transmission Asynchronous Transmission

Synchronization errors result in loss of
a complete block
Synchronization error results in loss of
only one character
High speed in communication Low speed in communication
Block length is fixed Block length is unlimited
Constant bit rate over a block Constant bit rate within a character
No idle time between characters Variable idle time between characters
Characters are buffered into blocks for
transmission
A character can be transmitted at
random
High transmission efficiency Reduced transmission efficiency
6.10 Standard Interface
In process control applications, communication between two or more
devices is always required for which interfacing is the bridge. A good interface
should have the following features:
Completeness in respect of electrical, physical and logical definition
Flexibility in respect of connecting a wide range of devices
Simplicity in respect of definition, structure and use
Symmetry in applications
Transparency in data pattern
Security of transmission mechanism
Some interface mechanisms have been devised to comply with these
features, and some additional ones also, which have been accepted
internationally. They are called standard interfaces. Some commonly used
standard serial interfaces applicable for industries are discussed in the
subsequent sections.
6.11 Serial Interface RS 232C
RS 232C stands for: RS for Recommended Standard and C for Third
Version
RS 232C is a standard interface approved by the Electronic Industries
Alliance (EIA) for connecting serial devices. In 1987, the EIA released a new
version of the standard and changed the name to EIA-232-D. In 1991, the EIA

teamed up with the Telecommunications Industry Association (TIA) and issued
a new version of the standard called EIA/TIA-232-E.
It should be emphasized that RS-232 and other related EIA standards,
define the electrical and mechanical details of the interface and do not define a
protocol. The RS-232 interface standard specifies the method of connecting
two devices, the Data Terminal Equipment (DTE) and the Data
Communications Equipment (DCE), also called Data Circuit-terminating
Equipment in EIA/TIA-232E.
The levels of voltage signals used in RS 232C are shown in Table 6.4.
Table 6.4 Voltage Levels in RS 232C
Transmitter Receiver
+5V to +15V
-5V to –15V
+3V to +25V
-3V to –25V
Logic ‘0’
Logic ‘1’
Equipment that uses the RS-232 standard has the following features:
Point-to-point communication
Suitable for serial, binary and digital data communication
Communication is generally asynchronous; meaning that there is fixed
timing between data bits, but variable time between character frames
Full duplex communications
Unbalanced transmission and, therefore, susceptible to noise
This type of interfacing is reliable up to a distance of about 16m (50ft),
depending on the type of cable used and is capable of a speed of data rates of
up to about 20 kbps according to the standard (but 115 kBaud in practice).
RS-232 is the serial connection found on IBM-compatible PCs. It is used
for many purposes, such as connecting a mouse, printer, or modern as well as
industrial instrumentation. Due to improvements in line drivers and cables,
application often increase the performance of RS-232 beyond the distance and
speed listed in the standard. RS-232 is limited to point-to-point connections
between pc SERIAL PORTS AND DEVICES.
The EIA-232 standard defines 25 electrical connections. The electrical
connections are divided into four groups, namely, (i) signal common, (ii) data

lines (transmitted data, received data), (iii) control lines (request to send, clear
to send, DCE ready, DTE ready) and (iv) timing signals.
Fig. 6.14 shows a female DB-25 connector of RS 232c along with detail
terminal identifications.
Receiver Signal Timing (DCE Source)
Fig. 6.14 Female DB-25 Connector of RS 232C
A male DB-25 connector of RS 232C is shown in Fig. 6.15 with all the
terminal identifications.
DTE Ready
Fig. 6.15 Male DB-25 Connector of RS 232C
Figs. 6.16 and 6.17 show female and male DB-9 connectors along with
their terminal identifications.
Fig. 6.16 Female DB-9 Connector of RS 232C
Fig. 6.17 Male DB-9 Connector of RS 232C
Fig. 6.18 shows the cable connection between DTE and DCE through
RS 232C DB9 connector.
Fig. 6.18 Cable Connection between DTE and DCE through RS 232C DB9
Connection

6.12 Serial Interface RS 422
RS 422 (EIA RS 422-A Standard) is the serial connection used on Apple
Macintosh computers. RS 422 uses a differential electrical signal, as opposed
to the unbalanced signals referenced to ground with RS 232. Differential
transmission, which uses two lines each for transmit and receive signals,
results in greater noise immunity and longer distances as compared to RS
232. The greater noise immunity and longer distances are big advantages in
industrial environments.
6.13 Serial Interface EIA 485
The EIA 485 standard is the most versatile of the EIA interface
standards and is a true balanced or differential standard. EIA 485 permits a
‘multidrop’ network connection on two wires and allows reliable serial data
communication for (i) distances of up to 1200m, (ii) data rates of up to 10 Mbps,
(iii) up to 32 line drivers on the same line and (iv) up to 32 line receivers on the
same line.
The major enhancement of EIA 485 is that a line driver can operate in
three states called tri-state operation, namely: (i) logic 1, (ii) logic 0 and (iii)
high-impendence. In the high impedance state the line driver draws virtually no
current and appears not to be present on the line. This is known as the
‘disabled’ state and can be initiated by a signal on a control pin on the line
driver integrated circuit. Tri-state operation allows a multidrop network
connection. Up to 32 transmitters can be connected on the same line, although
only one can be active at any one time. Each terminal in a multidrop system
must be allocated a unique address to avoid conflicting with other devices on
the system.
The EIA 485 interface standard is very useful for systems where several
instruments or controllers are connected on the same line. Special care should
be taken to choose coordinating software, which is used to decide which device
will be active at what time. In most cases, a master terminal, such as a PC or a
computer, controls which transmitter/receiver will be active at any one time.
The two-wire data transmission line does not normally require special
termination. On long lines, the leading and trailing edges of data pulses will be
much sharper if terminating resistors approximately equal to the characteristic

impendence (Zo) of the line are fitted at the extreme ends. For twisted pairs the
characteristic impedance is typically between 100 to 120 ohms.
An EIA 485 network can also be connected as a four-wire configuration.
In this type of connection, it is necessary that one node be a master node and
all others be slaves. The master node communicates to all the slaves, but a
slave node can communicate only to the master. Since the slave nodes are not
aware of another slave’s response to the master, a slave node cannot reply
incorrectly to another slave node. This is an advantage in a mixed protocol
environment.

6.14 Comparison of Different Recommended Standards
A comparative study between the different recommended standards is
presented in Table 6.5
Table 6.5 Comparisons of Different Standards
Specification Rs 232 Rs 423 Rs 422 Rs 485
Mode of operation Single
-ended
Unbalanced
Single
-ended
Balanced
Differential
Unbalanced
Differential
Balanced
Total number of drivers and
receivers on one line (one driver
active at a time for Rs 485
networks)
One driver
One receiver
One driver
Ten
receivers
One driver
Ten receivers
32 Drivers
32 receivers
Maximum cable length 16M
(50ft)
1300M
(4000ft.)
1300M
(4000ft.)
1300M
(4000ft.)
Maximum data rate
(13M-1300M for RS 422/RS 485)
20kbps 100kbps 10Mbps-
100kbps
10Mbps-
100kbps
Maximum driver output voltage +/25V +/-6V -0.25V to 6V -7V to+ 12V
Driver output
signal level
(unloaded max)
Loaded
+/5V to
+/-15V
+/-3.6V +/-2.0V +/-1.5V
Driver output
signal level
(Unloaded max)
Unloaded +/-25V +/-6V +/-6V +/-6V
Driver load Impedance 3k to 7k 450 100 54
Maximum driver
current in high Z
state
Power on
Power off
N/A
+/-6mA
and +/-2V
N/A
+/-100 A
N/A
+/-100 A
+/-100A
+/-100A
Slew rate (maximum) 30V/S Adjustable N/A N/A
Receiver input voltage range +/-15V +/-12V -10V to 10V -7V to +12V
Receiver input sensitivity +/-3V +/-200mV +/-200mV +/-200mV
Receiver input resistance
(one standard load for RS 485) 32 to 7k 4k min. 4k min. 12k
6.15 Software Protocol

Standard serial interfaces have their own specifications and characteristics
as discussed in the previous sections, but they do not mention any specific
software protocol to be used to communicate with devices. For use in an
industrial environment, serial instrument manufacturers use several protocols,
the most common of which are, (i) ASCII Protocol, (ii) Highway Addressable
Remote Transducer (HART) Protocol and (iii) Manufacturer Specific Protocol.
6.15.1 ASCII Protocol
ASCII protocol has a set of ASCII strings that constitute commands to the
device. This protocol is commonly implemented as asynchronous protocol,
because the transmitter and receiver do not have any tightly coupled
synchronisation mechanism. These networks are commonly master/slave,
where one computer is the master and the field devices are slaves. Normally,
all devices power up in receive mode, waiting to receive messages. When the
master transmits a message, all devices receive the message. Each of the
devices checks whether the message is addressed to it and then acts upon the
message.
6.15.2 HART Protocol
HART protocol finds wide usage across process control instrumentation.
This is commonly used with standard PC serial ports using an electrical adapter
for physical signal conversion. HART is a hybrid network that uses the 4-20rnA
analog signal commonly found on process control instrumentation and adds to
it a digital signal. The digital signal is added in such a way that it does not
interfere with the standard 4-20mA functionality. In a control system where the
HART protocol is understood, the digital signals can be read from the device to
read and write data.
6.15.3 Manufacturer Specific Protocol
There are many protocols that are used on standard serial interfaces, but
use much more sophisticated data packaging schemes. These protocols use
different mechanisms to ensure reliable, robust communication. Most
manufacturers of serial devices invent their own ASCII protocol for their
particular device. It is a relatively straightforward task to read and write these

ASCII strings using the standard serial functions built into a language such as
Visual Basic. OptoMux and ModBus ASCII are examples of serial protocols that
use standard serial ports and have achieved broad acceptance across many
devices and suppliers. Most such protocols are proprietary to a specific
supplier, requiring special software drivers and often - special interface
hardware. Examples of these protocols are those used for communicating with
PLCs, for example Data Highway+ from AIlen-Breadley or ModBus+ from
Modicon.
6.16 Industrial Network
A computer with a single network interface can communicate with many
other computers. This economy and flexibility has made networks the interface
of choice. Typical advantages of networks include resource sharing and ease
of communication.
Small networks are often called Local Area Networks (LANs). These may
connect a few hundred computers within a distance of hundreds of meters.
These networks are inexpensive. Data can be transmitted at rates of millions of
bits per second. Many control systems are using this kind of network to
communicate with other controllers and computers. Typical applications
include:
Taking quality readings with a PLC and sending the data to a database
computer.
Distributing recipes or special orders to batch processing equipment.
Monitoring remote equipment.
Wide Area Networks (WANs) are used by LANs to communicate overlong
distances. These are not common in controls applications, but might be needed
for a very large-scale process. An example might be an oil pipeline control
system that is spread over hundreds of kilometers.
6.17 Network Topology
Local Area Networks share information and resources. To enable all the
nodes on the network to share information effectively, they must be connected
through some transmission medium in some specific fashion. The method of
connection is known as the network topology. The nodes need to share this
transmission medium in such a way as to allow nodes access to the medium

and minimize disruption of an established sender.
A physical topology defines the wiring layout for a network. This specifies
how the elements in the network are connected to each other electrically. This
arrangement will determine what happens if a node on the network fails. There
are basic four types of network topology as shown in Fig. 6.19.
Fig. 6.19 Classification of Network Topology
Bus and Ring topologies both share the same network wire. In a star
configuration each computer has a single wire that connects it to a central hub.
Combinations of these can be used to form hybrid topologies, which are used
to overcome the drawbacks of each of the three component topologies.
6.17.1 Bus Topology
A bus topology describes a network in which each node is connected to
a common single communication channel or “bus”. This bus is sometimes
called a backbone, as it provides a spine for the network. Every node can hear
each message packet as it goes past. Each node checks the destination
address that is included in the message packet to determine whether that
packet is intended for the specific node. When the signal reaches the end of
the bus, an electrical terminator absorbs the packet energy to keep it from
reflecting back along the bus cable, possibly interfering with other messages
already on the bus. Each end of a bus cable must be terminated, so that
signals are removed from the bus when they reach the end. A network with a
bus topology has been shown in Fig. 6.20
Fig. 6.20 Bus Topology of a Network
In a bus topology, nodes should be far enough apart so that they do not
interfere with each other. However, if the backbone bus cable is too long, it may
be necessary to boost the signal strength using some form of amplification, or

repeater. The maximum length of the bus is limited by the time interval that
constitutes "simultaneous" packet reception.
The advantages and disadvantages of bus topology are tabulated in
Table 6.6.
Table 6.6 Advantages and Disadvantages of Bus Topology
Advantages
A bus uses relatively small cable length compared to other topologies
having the simplest wiring arrangement.
Bus topology is simple and flexible.
Since nodes are connected by high impedance tapings across a
backbone cable, it is easy to add or remove nodes from a bus. This
makes it easy to extend a bus topology.
The broadcasting of messages is advantageous for one-to-many data
transmissions.
Disadvantages
There can be a security problem, since every node may see every
message, even if the message is not meant for it.
Diagnosis and fault-isolation can be difficult, since the fault can be
anywhere along the bus.
The bus cable can be a bottleneck when network traffic gets heavy. This
is because a considerable amount of time is taken by the nodes in trying
to access the network.
There is no automatic acknowledgement of messages, since messages
get absorbed at the end of the bus and do not return to the sender.
6.17.2 Ring Topology
A ring topology is both a logical and a physical topology. As a logical
topology, a ring is distinguished by the fact that message packets are
transmitted sequentially from node to node, in a predefined order, and as
such, it is an example of a point-to-point system. Nodes are arranged in a
closed loop, so that the initiating node is the last one to receive a packet. As
a physical topology, a ring describes a network in which each node is

connected to exactly two other nodes. Information traverses a one-way path,
so that a node receives packets from only one node and transmits them only
to one other node. A message packet travels around the ring until it returns
to the node that originally sent it. In a ring topology, each node can act as a
repeater, boosting the signal before sending it on. Each node checks
whether the message packet's destination node matches its address. When
the packet reaches its destination, the destination node accepts the
message and then sends it back to the sender, to acknowledge receipt. Fig.
6.21 shows a network in Ring topology, and its advantages and
disadvantages are tabulated in Table 6.7.
Fig. 6.21 Ring Topology of a Network
Table 6.7 Advantages and Disadvantages of Ring Topology
Advantages
A physical ring topology has minimal cable requirements.
No wiring centre or closet is needed.
The message can be automatically acknowledged.
Each node can regenerate the signal.
Disadvantages
If any node goes down, the entire ring goes down.
Diagnosis/troubleshooting is difficult because communication is only
one-way.
Adding or removing nodes disrupts the network.
There will be a limit on the distance between nodes.
Since ring topologies use token passing to control access to the network,
the token is returned to sender with the acknowledgement. The sender then
releases the token to the next node on the network. If this node has nothing to
say, the node passes the token on to the next node, and so on. When the token
reaches a node with a packet to send, that node sends its packet. Physical ring

networks are rare, because this topology has considerable disadvantages.
6.17.3 Star Topology
A star topology, as shown in Fig. 6.22, is a physical topology in which
multiple nodes are connected to a central component, generally known as a
hub. The hub of a star is usually a wiring centre; that is, a common termination
point for the nodes, with a single connection continuing from the hub. In some
cases, the hub may actually be a central computer that contains a centralised
file and control system, with all its nodes attached directly to the server. As a
wiring centre, a hub may in turn be connected to the file server or to another
hub. All signals, instructions, and data going to and from each node must pass
through the hub to which the node is connected. The telephone system is the
best-known example of a star topology, with lines to individual customers
coming from a central telephone exchange location. The advantages and
disadvantages of star topology are shown in Table 6.8.
Table 6.8 Advantages and Disadvantages of Star Topology
Advantages
It is easy to add or remove nodes, and to modify the cable layout.
Troubleshooting and fault isolation is easy.
Failure of a single node does not isolate any other node.
Each node can regenerate the signal.
The inclusion of a central hub allows easier monitoring of traffic for
management purposes.
Star topology is deterministic, which means that its performance can be
predicted.
Disadvantages
A star topology requires large lengths of able.
If the hub fails, the entire network fails. To cope up with this possibility in
a sensitive network, redundancy is enhanced by incorporating another
hub in parallel.
Fig. 6.22 Star Topology of a Network

6.17.4 Tree Topology
Fig. 6.23 shows a tree topology that is constructed out of smaller bus
networks. Repeaters are used to boost the signal strength and make the
network larger. In this type of topology, the disadvantages of other types are
partially overcome.
The advantages of tree topology are given below.
It is easy to tree since tree is into sub-units and it is easier to add new
units.
It is easy to disconnect a sub-unit and hence fault isolation is easier.
The major disadvantage of this network is that it is dependent on the root
device and if this fails to operate, the reliability of the entire network will be at
stake.
For a factory environment the bus topology is popular. The large
member of wires required for a star configuration can be expensive and
confusing. The loop of wire required for a ring topology is also difficult to
connect.
6.18 Media Access Methods
Once the topology of a particular network is chosen, a user faces the
problem of accessing a particular node in a multi-LAN multi mode network. A
common and important method of differentiating between different LAN types is
to consider their media access methods. Since there must be some method of
determining which node can send a message, this is a critical area that
determines the efficiency of the LAN. The common methods used in current
LANs are shown in Fig. 6.24.
Fig. 6.24 Different Media Access Methods
6.18.1 CSMA/CD (Collision Sense Multiple Access/Collision Detection)
This method is a first-come-first-served media accesses method. It
operates in a similar manner to polite human communication. A person listens
before he speaks allowing anybody else who is already speaking to finish. If

two persons start to speak at the same time, both stop a little later and after a
lapse of time, one of them starts to speak. Thus in this method of conversation,
one first ensures that the other person is not speaking before starting to speak.
In this media access method, which is in fact a contention based access
method, the operation is similar. The first node to seek access when the
network is idle will be able to transmit. Contention is at the heart of the Collision
Sense Multiple Access/Collision Detection (CSMN/ CD).
In this method, if two nodes start talking and detect a collision they will
stop, wait for a random time and then start again. The collision detection logic
ensures that more than one message on the channel will simultaneously be
detected, and transmission from both ends, eventually stopped. The system is
a probabilistic system, since access to the channel cannot be ascertained in
advance.
6.18.2 CSMA/BA (Collision Sense Multiple Access/Bitwise Arbitration)
If two nodes start talking at the same time, they will stop and use their
node addresses to determine which one goes first.
6.18.3 Master-Slave-One
Device One in the network is the master and is the only one that may
start communication. Slave devices will only respond to requests from the
master.
6.18.4 Token Passing
Token passing is a deterministic media-access method in which a token, or
permission to talk, is passed from node to node, according to a predefined
sequence. A token is a special packet, or frame, consisting of a signal
sequence, which cannot be mistaken for a message. At any given time, the
token can be available or in use. When an available token reaches a node,
that node can access the network for a maximum predetermined time, before
passing the token on.
This deterministic access method guarantees that every node will get
access to the network within a given length of time, usually in the order of a few
milliseconds. This is in contrast to a probabilistic access method (such as

CSMA/CD), in which nodes check for network activity when they want to
access the network, and the first node to claim the idle network gets access to
it. Because each node gets its turn within a fixed period, deterministic access
methods are more efficient on networks that have heavy traffic. With such
networks, nodes using probabilistic access methods spend much of their time
competing to gain access and relatively little time actually transmitting data
over the network. Network architectures that support the token passing access
method include Token Bus, ARC net, FDDl, and Token Ring.
To transmit, the node first marks the token as "in use", and then transmits
a data packet, with the token attached. In a ring topology network, the packet is
passed from node to node, until the packet reaches its destination. The
recipient acknowledges the packet by sending the message back to the sender,
who then sends the token on to the next node in the network.
In a bus topology network, the next recipient of a token is not necessarily
the node that is closest to the current token passing node. Rather, the next
node is determined "by some predefined rule. The actual message is broadcast
on to the bus for all nodes to "hear". For example, in an ARC net or token bus
network, the token is passed from one node to the node with the next lower
network address. Networks that use token passing generally have some
provision for setting the priority with which a node gets the token. Higher-level
protocols can specify that a message is important and should receive higher
priority.
6.19 Open System Interconnection (OSI) Network Model
The Open System Interconnection (OSI) model was developed as a tool
to describe the various hardware and software parts found in a network in a
systems. It is most useful for explaining a successful network application. The
model contains seven layers, with the hardware at the bottom, and the software
at the top. A system has been shown in Fig. 6.25 in which computer # 1 is an
originator computer and computer #2 is an application computer.

Fig. 6.25 A System Containing Two Computers
A message originating in an application programme in computer #1 is
sent to the application in computer #2. This message has to travel through
those seven layers. The name of each layer and its basic action have been
tabulated and explained in Table 6.9.
Table 6.9 Names and Action of OSI Layers
Name of Layer Basic Action
Application This is level software on the computer.
Presentation Translates application requests into network operations.
Session This deals with multiple interactions between computers.
Transport Breaks up and recombines data into small packets.
Network Network address and routing added to make frame.
Data link The encryption for many bits, including error correction
added to a frame.
Physical and
interconnecting medium
The voltage and timing for a single bit in a frame.
The wires or transmission medium of the network.
6.19.1 Application Layer
This is the layer where the user programme resides. On a computer, this
might be a web browser, or a ladder logic programme on a PLC.
6.19.2 Presentation Layer
This layer acts as an application interface so that syntax, formats and
codes are consistent between the two-networked machines. This layer also
provides subroutines that the user may call to access network functions, and
perform functions such as encryption, compression and conversion of data
from one form to another.
6.19.3 Session Layer
This layer establishes the connection between applications. The session
layer deals with issues that go beyond a single block of data. In particular, it

deals with resuming transmission if it is interrupted or corrupted. It also
enforces dialogue rules, which specify the order and speed of data transfer
between a sender and a receiver. For example, the session layer would control
the flow of data between an application and a printer with a fixed buffer, to
avoid buffer overflows.
6.19.4 Transport Layer
This layer is essentially an interface between the processor and the
outside world. It generates addresses for session entities and ensures that
packets of data have been sent or received. The transport layer will divide
small amounts of data into smaller packets, or recombine them into one larger
piece. This layer also checks for data integrity, often with a checksum.
6.19.5 Network Layer
This layer performs accounting, addressing and routing functions on
messages received from the transport layer. If the message is lengthy, this
layer will break it up and sequence it over the network. This layer also uses a
network routing table to find the next node on the way to the destination
address.
6.19.6 Data link Layer
This layer establishes and controls the physical path of communication
from one node to the next, with error detection. This layer performs Media
Access Control (MAC) to decide which node can use the media and when. The
rules used to perform these functions also are known as protocols.
6.19.7 Physical Layer
This layer is the electrical and mechanical definition of the system. It
describes items such as voltage levels and timing for the transmission of single
bits. This layer does not add anything to the message frame. It simply converts
the digital message received from the data link layer into a string of ones and
zeros represented by a signal on the media. One example is RS 485, where a
binary 1 is represented by a mark or off state and a binary zero is represented
as a space or on state. A mark is a negative voltage between the terminals on

the generator while a space is a positive voltage. The interface or
interconnecting media can be categorised by mechanical, electrical, functional
and procedural aspects. Mechanical specification defines types of connectors
and the number of pins. Electrical specifications define line voltages and
waveforms as well as failtre modes and effects. Functional specifications
include timing, data, control and signal grounds, and which pins the functions
are to use. The procedural interface specifies how signals are exchanged. Fig.
6.26 shows how the originator computer and the application device are
interconnected through the OSI layers.
In the world of instrumentation this OSI model as shown in Fig. 6.26 is
often simplified to use only three layers as shown in Fig. 6.27
(i) Layer 1 Physical layer
(ii) Layer 2 Data link layer
(iii) Layer 3 Application layer
This simplifies the operation of the overall system significantly. There is
another layer mentioned in the three layer model entitled user layer. This is not
part of the OSI model but is a critical part of the overall system.
Fig. 6.27 Structure of Simplified OSI Model
Table 6.10 shows how these layers are applied in the standard interfaces.
Table 6.10 Applications of OSI Layers
Name of standard interface Example of a layer
RS 232 and RS 485
Modbus protocol
Ethernet
HART smart instrumentation protocol
Profibus and foundation bieldbus
Physical layer
Data link layer
Physical and data link layers
Physical, data link and application layers
Physical, data link and application layers
6.20 Network Components
In designing a network, hardware is needed. Table 6.11 gives a
description of most of the hardware needed in the design of networks.

Table 6.11 Network Components and their Uses
Name of component OSI layer Purpose
Computer Network enabled equipment
Network interface
hardware
Network interface may already be built into the
computer/PLC/sensor/etc.
Media Interconnecting
media
The physical network connection between network
nodes. 10baseT (twisted pair) is the most popular. It
is a pair of twisted copper wires terminated with an
RJ-45 connector. 10base2 (thin wire) is a thin-
shielded coaxial cable with BNC connectors.
10baseF (fiber optic) is costly, but signal
transmission and noise properties are very good.
Repeater Physical layer These accept signals and retransmit them so that
longer networks can be built.
Hub/Concentrator Interconnecting
media
A central connection point that network wires will be
connected to. It will pass network packets to local
computers, or to remote networks if they are
available.
Router Network layer This will isolate different networks, but redirect traffic
to other LANs.
Bridges Ata link layer These are intelligent devices that can convent data
on one type of network, to data on another type of
network. They can also be used to isolate two
networks.
Gateway Application
layer
A gateway is a full computer that will direct traffic to
different networks, and possibly screen packets.
They are often used to create firewalls for security.
6.21 Control Network Issues
A wide variety of networks are commercially available, and each has its
own particular strengths and weaknesses. The differences arise from the basic
designs. One simple issue is the use of the network to deliver power to the
nodes. Some control networks will also supply enough power to drive some
sensors and simple devices. This can eliminate separate power supplies, but it
can reduce the data transmission rates on the network. The use of network
taps or tees to connect to the network cable is also important. Some taps or

tees are simple passive electrical connections, but others involve sophisticated
active tees that are costlier, but allow longer networks.
The transmission type determines the communication speed and noise
immunity. The simplest transmission method is baseband, where voltages are
switched off and on to signal bit states. This method is subject to noise, and
must operate at lower speeds. RS 232 is an example of baseband
transmission. Carrierband transmission uses Frequency Shift Keying (FSK),
that will switch a signal between two frequencies to indicate a true or false bit.
This technique is very similar to Frequency Modulation (FM) radio where the
frequency of the audio wave is transmitted by changing the frequency of a
carrier frequency to about 100MHz. This method allows higher transmission
speeds, with reduced noise.
Broadband networks transmit data over more than one channel by using
multiple carrier frequencies on the same wire. This is similar to sending many
cable television channels over the same wire. These networks can achieve
very large transmission speeds and they also guarantee real time network
access.
6.22 Advantage of a Standardised Industrial Network
The advantages of using standardised networks in an industrial
environment are discussed in the subsequent sections.
6.22.1 Open Systems
It is difficult and costly to integrate systems with instrumentation from
several vendors because of the multitude of communication protocols. With
standard protocols, devices from many suppliers can coexist on the same
network and communicate with one another.
6.22.2 Cost Reduction in Wiring
Many systems still use 4-20mA analog instrumentation, requiring
extensive point-to-point wiring. Standard networking incurs lower installation
costs.
6.22.3 Increased Information Need
In the present day industrial environment, engineers are required to

gather more information about their processes and the instrumentation
connected to the processes.
Traditional 4-20mA instrumentation provides only one value, the process value.
On a digital network, instruments can provide maintenance and diagnostics
information for better tracking of instrument performance. If these are
standardised, efficient control of a process can be achieved.
6.22.4 Intelligent Devices
Now-a-days instruments have been developed with more intelligence to
satisfy consumers' demands for more functionality at lower costs. The
increased information available with a digital network is necessary for
capitalising on the extra capabilities made possible by intelligence in the
devices. Standardisation in information collection, transmission and control
helps in optimising the efficiency of a process.
On the basis of the points discussed above, it is clear that the use of a
standard network enhances the reliability and efficiency operation of an
industry.
6.23 Industrial Network
In industry, there are many networks in use and under development today.
Different types of networks exist because there is a wide range of industrial
process and manufacturing applications that use digital communications.
6.24 Bus Network
To accommodate efficient communication in a complicated process,
different types of bus networks are devised. For overall enhancement of
efficiency of an industrial process, these bus network configurations play an
important role. Fig. 6.28 shows a block diagram of the total bus network of a
complete process plant. Process I/O devices are connected to a process bus
network and discrete I/O devices are connected to a device bus network, both
of which are connected to a LAN through a PLC. Remote I/O devices send their
information through PLCs to the same LAN, which is interfaced to the
information network through supervisory PLCs. This information network is
connected to the overall plant computing system. Fig. 6.29 lists some of these
networks and their bus classification.

6.25 Device Bus Network vs. Process Bus Network
Device bus networks that include discrete devices, as well as small analog
devices, are called byte-wide bus networks. These networks can transfer
between 1 and 50 or more bytes of data at a time. Device bus networks that
only interface with discrete devices are called bit-wide bus networks. Bit-wide
networks transfer less than 8 bits of data from simple discrete devices over
relatively short distances.
The size of the information packet has an inverse effect on the speed at
which data travels through the network. Therefore, since device bus networks
transmit only small amounts of data
Fig. 6.28 Block Diagram of a Total Bus Network
at a time, they can meet the high-speed requirements for discrete
implementations. Conversely, process bus networks work slower because of
the large size of their data packets, so they are more applicable for the control
of analog I/O devices, which do not require fast response times. The
transmission speeds for both types of I/O bus networks can be as high as 1 to
2.5 megabits per second.
Fig. 6.29 Different Types of Industrial Networks
Since process bus networks can transmit several hundred bytes of data at
a time, they are suitable for applications requiring complex data transmission.
Two simple examples may be cited in support of the above discussions. In a
conveyor belt of a batch process unit, proximity sensors are used which can be
networked together to control the movement of products on the belt, as well as
to provide simple diagnostic information. Since a proximity sensor only
transmits an ON/OFF signal, it can be used to indicate the location of a product
on the belt through a signal accommodated in a few bits of data. The same
may also be used to indicate the condition of the belt by addition of a few bits.

Another example is of an intelligent pressure transmitter fitted in the pipeline of
a fluid. This transmitter, in addition to sending information about the pressure of
the fluid, may also send information about temperature and flow rate of the fluid
through the pipe. All this information requires a large data packet to be
transmitted. This sensor interface, therefore, requires a process bus network.
These simple examples justify the necessity of a wide variety of industrial
communication networks. These networks demand sophisticated protocols
rather than the simple command sets, which are commonly used with typical
serial instruments for efficient operation of the communication system.
Dedicated hardware and software drivers are required to provide robust
connections between computer platforms and each of these networks. Options
for using these networks today include DOE servers and DLL function libraries
for the Windows environment. Although anyone network may not satisfy all
industrial networking requirements, these buses will bring a more standardised
interconnection between computers and the devices used in industrial
automation applications.
6.26 Controller Area Network (CAN)
The Controller Area Network is a serial bus growing in popularity as a
device level network. CAN was developed by Bosch to cope with the needs of
in-vehicle automotive communications. It was further developed to provide a
digital serial bus system to connect controllers. CAN has been standardised
internationally (ISO DIS 11898 and ISO DIS 11519-2) and is already available
in a number of silicon implementations. The CAN protocol can detect and
correct transmission errors caused by electromagnetic interference. In addition
the network itself is relatively easy to configure and can perform centralised
diagnostics.
There are now many examples of CAN being the basis for networks used
in industrial manufacturing applications. CAN is particularly well suited to
networking smart I/O devices, as well as sensors and actuators, either in a
single machine or in a plant. Several industrial devicebus systems have been
built upon CAN. Allen-Bradley developed DeviceNet, a CAN-based protocol
now maintained by the Open DeviceNet Vendor's Association. Other such
industrial networks include CANopen, developed by CAN in Automation (CiA)

and the Smart Distributed System (SDS), developed by Honeywell Microswitch.
CAN is a communications protocol specification that defines parts of the OSI
physical and data link layers. CAN does not specify the entire physical layer or
the medium upon which it resides, or the application layer protocol used to
move data.
6.26.1 Characteristics of CAN Protocol
The OSI seven layer communication model for CAN protocol is shown in
Fig. 6.30, and the basic characteristics of CAN protocol are shown in Table
6.12.
Fig. 6.30 OSI 7-Layer Communications Model for CAN
Table 6.12 Characteristics of CAN Protocol
CAN communications are performed in a unit cal\ed a frame, which may
have a length of up to 8 bytes.
Access to the CAN network is carried out using a method called
nondestructive bitwise arbitration. In this system, when a CAN node
wants to send a frame, it waits for the bus to become idle, it then starts
its frame with an arbitration identifier (10). Because of the underlying
physical layer, a dominant bit always overrides any recessive bit. As a
node is writing its bits to the bus, it also reads the bus to determine
whether the bit on the bus is different from the bit written by the node. If
the bits are different, the node stops its write because some other node
has higher priority to the bus. Thus, the arbitration ID determines the
priority of messages on the bus, with lower IDs having higher priority.
CAN provides extensive error correction, including bit monitoring
(comparing transmitted bits to be received), bit stuffing, CRC checksum,
acknowledgement by all receivers, frame check (verify length),
automatic retry, and fault confinement (defective devices automatically
shut off).
Typical data rate are 125kbps to 1 Mbps, depending upon the distance
over which the network is operating. The allowable distance ranges from
40m at 1 Mbps to 500m at 125kbps.

Industrial protocols built upon CAN add further specifications in the
areas of wiring types, connectors, diagnostics indicators, configuration
switches, and hot-swapping capability.
CAN bus covers the first two layers of the OSI model. The network has a
bus topology and uses bit wide resolution for collisions on the network
i.e., the lower the network identifier, the higher the priority for sending.
6.26.2 CAN Data Frame and Communication
In a CAN network, the transmitted messages are called frames. The CAN
protocol works with two frame formats, the essential difference between two
formats is the length of the arbitration 10. In the standard frame format, the
length of the ID is 11 bits, in the extended frame format, the length of the 10 is
29 bits. The four different frame types include: (1) data (2) error (3) remote and
(4) overload.
The data frame begins with a start bit. This is then followed with a
message identifier. The ready to receive it bit will be set by the receiving
machine. If the receiving machine does not set this bit the remainder of the
message is aborted, and the message is resent later. While sending the first
few bits, the sender monitors the bits to ensure that the bits that are sent are
heard in the same way. If the bits do not agree, then another node on the
network has tried to write a message at the same time - there was a collision.
The two devices then wait for a time period based on their identifier and then
start to resend. The second node will then detect the message, and wait until it
is done. The next 6 bits indicate the number of bytes to be sent, from 0 to 8.
This is followed by two sets of bits for a Cyclic Redundancy Check (CRC) error
checking, this is a checksum of earlier bits. The receiving node sets the next bit
ACK slot if the data was received correctly. If there was a CRC error this bit
would not be set, and the message would be resent. The remaining bits end
the transmission. The end of frame bits is equivalent to stop bits. There must
be a delay of at least 3 bits before the next message begins.
6.26.3 CAN Error Detection and Confinement
One of the most important and useful features of CAN is its high reliability,
even in extremely noisy environments. CAN provides a variety of mechanisms
to detect errors in frames. A frame with an error is retransmitted until it is

received successfully. CAN also provides an error-confinement mechanism
that is used to remove a malfunctioning device from the CAN network when a
high percentage of its frames result in errors. Error confinement prevents
malfunctioning devices from disturbing the overall network traffic.
6.27 DeviceNet
Originally developed by Allen Bradley, DeviceNet is managed by the
Open DeviceNet Vendors Association (ODVA http://www.odva.org).an
independent supplier organization. DeviceNet is a low-level network designed
to connect industrial sensors and actuators to higher level devices like
controllers. DeviceNet focuses especially on the interchangeability of low-cost,
simple devices often used in manufacturing applications - such as limit
switches, photoelectric sensors, motor starters, bar code readers, variable
frequency drives, and operator interfaces. One goal of DeviceNet was to
achieve the same level' of interchangeability for 120/240V AC and 24V DC
discrete devices using digital communications as is possible with hardwired
I/O.
This network is made noise resistant and robust. In this network, the PLC
chassis can be eliminated and the network can be connected directly to the
sensors and actuators. This will reduce the total amount of wiring by moving
the I/O points closer to the application point. This can also simplify the
connection of complex devices, such as HMls.
6.27.1 Physical Layer Features
Table 6.14 shows the key parameters of data rates and wire lengths for
the DeviceNet physical layer.
Table 6.14 DeviceNet Data Rates and Wire Lengths
Data Rate Trunk Distance
Drop Length
Maximum Cumulative
125kb/s 500m (I 640ft) 6m (20ft) 156m (512ft)
250kb/s 250m (820ft) 6m (20ft) 78m (256ft)
500kb/s 100m (328ft) 6m (20ft) 39m (I 28ft)
Key characteristics of the DeviceNet physical layer are as shown in Table 6.15.

Table 6.15 Characteristics of DeviceNet Physical Layer
Basic trunkline-dropline physical topology.
Separate twisted-pair buses for both signal and power distribution with
signal and power carried in the same cable.
Optional opto-isolated design so that externally powered devices can
share the bus cable with bus-powered devices.
Hot insertion of devices without removing power from the network.
6.27.2 Communication Features
DeviceNet builds on the CAN protocol. Using the OSI model, CAN
specifies only portions of the physical layer and data link layer (layers 1 and 2),
while DeviceNet adds the remainder of these layers, plus the media layer and
application layer (layers 0 and 7). Two way communications inputs and outputs
allow diagnosis of network problems from the main controller. Fig. 6.31 shows
the OSI model of DeviceNet and the relationship between the communications
stack for DeviceNet and CAN.
Fig. 6.31 DeviceNet Communications Stack including Contribution of CAN
Protocol
As a general statement, CAN defines the form of data movement while
the DeviceNet Application Layer defines the meaning of the data moved.
Some specific characteristics of DeviceNet communications are shown
in Table 6.16.
Table 6.16 Specific Characteristics of DeviceNet
Prioritised, peer-to-peer communication based on the nodestructive
bitwise arbitration scheme of CAN protocol.
Up to 64 node addresses on a single network.
Lengths of 500m/250m/100m for speeds of 125kbps/250kbps/500kbps
respectively.
Addressing includes peer-to-peer, multicast, master/slave, polling or
change of state.

A single bus cable that delivers data and power.
Producer-consumer model for data transfer.
Data packet size of 0-8 bytes.
Devices can be added/removed while power is on.
6.27.3 A DeviceNet Network
The network cable is important for delivering power and data. The two
basic types are thick and thin trunk line. The cables may come with a variety of
connections to devices such as: bare wires, unsealed screw connector,
usealed mini-connector, sealed micro-connector, vampire tapes. Each node on
the network will have its own address between 0 and 63.
6.28 ControlNet
ControlNet is complimentary to DeviceNet. It is also supported by a
consortium of companies, (http://www.controlnet.org), who also conduct some
projects in cooperation with the DeviceNet group. The standard is designed for
communication between controllers, and permits more complex messages than
DeviceNet. It is not suitable for communication with individual sensors and
actuators, or with devices off the factory floor. ControlNet is a more complicated
method than DeviceNet.
Some of the basic features of this network are given in Table 6.17.
Table 6.17 Specific Characteristics of ControlNet
Multiple controllers and I/O on one network.
Deterministic.
Data rates up to 5Mbps.
Multiple topologies (bus, star, tree).
Up to 99 nodes with addresses, up to 48 without a repeater.
Multiple media (coax, fiber, etc.).
Data packets up to 510 bytes. Unlimited I/O points.
Maximum length may be: 1000m with coax at 5Mbps - 2 nodes; 250m
with coax at 5Mbps - 48 nodes; 500m with coax at 5Mbps with
repeaters; 3000m with fiber at 5Mbps, 30Km with fiber at 5Mbps and
repeaters.

5 repeaters in series, 48 segments in parallel.
Devices can be removed while network is active.
Devices powered individually (no network power).
This control network is unique because it supports a real-time messaging
scheme called Concurrent Time Domain Multiple Access (CTDMA). The
network has a scheduled (high priority) and unscheduled (low priority) update.
When collisions are detected, the system will wait for a time of at least 2ms, for
unscheduled messages. But scheduled messages will be passed sooner,
during a special time window.
6.29 Ethernet
Ethernet was originally developed by Xerox, Digital, and Intel in the
1970s, but now it is under the IEEE Standard 802.3. It has become the least
expensive, most popular high-speed LAN alternative in use. There are several
common definitions, which help to describe the various types of Ethernet media
as shown in Table 6.18.
Table 6.18 Different Types of Ethernet Media
Type Description
Standard Ethernet It is a thick coaxial cable and is called Thick Ethernet. It
can run for as
(10Base5) much as 500m (1,640ft.), without using a repeater.
Connection to this cable is carried out through a vampire
clamp that has a 15-pin connector called an AUI port on
the other end.
Thin Ethernet
(10Base2)
It uses a less expensive, thin coaxial cable and connects to
nodes by way
of a T type BNC connector.
Twisted-pair Ethernet
(10BaseT) It uses telephone wiring and hence is very economical.
Standard RI-45 connectors are used in the system. This
type of Ethernet is wired in a star configuration and
requires a hub.
Fiber-optic Ethernet
(10BaseF)
It is used to extend Ethernet segments to distances of
1.2km.

Fast Ethernet is essentially the same as the original Ethernet except that
the transfer rates at 100 Mbps., are 10 times faster Another difference is that
Fast Ethernet includes a mechanism for auto-negotiation of the media speed.
This means dual-speed Ethernet interfaces can be installed and run at either
10 or 100Mbps. There are three forms of Fast Ethernet as defined in the IEEE
Standard 802.3. These are shown in Table 6.19.
Table 6.19 Types of Fast Ethernet
Type Description
100BaseT4
100BaseTX
100BaseFX
It uses four pairs of telephone-grade twisted-pair wire.
It uses two pairs of data grade twisted-pair wire.
It uses two stands of fiber-optic cable.
6.29.1 Protocol
Ethernet defines only the physical layer and not the protocol. Ethernet
defines the data link layer and functions at layers 1 and 2 of the OSI model as
shown in Fig. 6.32.
6.30 Proprietory Network
Allen Bradley has developed the Data Highway II (DH +) network for
passing data and programmes between PLCs and to computers. This bus
network allows up to 64 PLCs to be connected with a single twisted pair in a
shielded cable. Token passing is used to control traffic on the network.
Computers can also be connected to the DH+ network, with a network card to
download programmes and monitor the PLC. The network will support data
rates of 57.6Kbps and 230Kbps.
Fig.6.32 OSI Model and its Relation to Ethernet
6.31 Smart Distributed System
The Smart Distributed System, developed by Honeywell's Micro Switch
Division, is an advanced bus system for intelligent sensors and actuators. This
CAN-based network is useable at both the control and device levels. This
optimises machine applications. Combining the power of CAN technology,

computer control and .intelligent I/O devices, the Smart Distributed System
provides a truly integrated solution.
A Smart Distributed System can interface up to 64 nodes, with a
maximum of 126 addresses, over a single 4-wire cable. These intelligent
sensor and actuator devices do more than just turn on and off. Smart
Distributed System devices have advanced device-level functions, system and
device diagnostics. The Smart Distributed System can interface with both PC
controllers and PLCs. It is ideally suited for industrial applications replacing
older, discretely wired sensors and actuator systems.
6.32 Interbus-S
Interbus-S, introduced in 1984 by Phoenix Contact, is a ring-based,
distributed device network for manufacturing and process control. An Interbus-
S system consists of a controller board installed into a PLC or computer (PC,
VME, etc.) that communicates to a variety of I/O devices. .
6.33 Seriplex Bit-wide Device Bus Network
The Seriplex device bus network can connect up to 510 field devices to a
PLC in either a master/slave or peer-to-peer configuration. The Seriplex
network is based on the Application Specific Integrated Circuit, or ASIC chip,
which must be present in all I/O field devices that connect to the network. I/O
devices that do not have the ASIC chip embedded in their circuitry (i.e., off-the-
shelf devices) can connect to the network via a Seriplex I/O module interface
that contains a slave ASIC chip. The ASIC I/O interface contains a 32 built-in
Boolean logic function that is used to create the logic necessary for the
communication, addressability, and intelligence to control the field devices
connected to the network bus. Fig. 6.33 shows a Seriplex bus network with a
controller. A Seriplex network can span distances of up to 1,515m (5,000ft.), in
a star, loop, tree, or multidrop configuration. This bit-wide bus network can also
operate without a host controller. Unlike the ASI network, the Seriplex device
bus network can interface with analog I/O devices; however, the digitised
analog signal is read or written one bit at a time in each scan cycle.

Fig. 6.33 Seriplex Bus Network with a Controller
6.34 AS-I Interface
AS-I, the abbreviation of Actuator/Sensor Interface, is a connection system
for the lowest process level in automation systems. This system uses a single
electrical cable called AS-I cable. Using the AS-I cable and the AS-I master, the
simplest binary sensors and actuators can be connected to the control devices
at the field level via AS-I modules. AI-I is the SIMATIC product name for this
AS-I technology, which has been proposed for international standardisation.
Under the name AS-interface, Siemens produces master interface modules for
industrial PCs and programmable controllers. The range of available master
interface modules is being developed continuously.
The main characteristics of the AS-interface are presented in Table 6.20.
Table 6.20 Main Characteristics of AS Interface
AS-interface is optimised for connecting binary sensors and actuators.
AS-I cable is used for data exchange between the sensors/actuators and
a master and between power supply and sensors and actuators.
Simple and cost-effective wiring having high flexibility, which can be
easily installed using the "penetration" technique.
It has a fast reaction time, e.g., the AS-I master requires a maximum of
5ms for cyclic data exchange with up to 31 stations.
Stations on the AS-I cable can either be sensors/actuators with an
integrated AS-I connector or AS-I modules to which up to four
conventional binary sensors/actuators can be connected.
With AS-I modules, up to 124 actuators/sensors can be operated on the
AS-I cable.
A simple 2-wire cable without shielding or twisting can be used to
transfer both the data and the power supply.
Tree structure network consists of a cable of length up to 100m. The
"tree structure" of the AS interface allows any point on a cable section to
be used as the start of a new branch. Loops are not permitted. The total
length of all subsections can be up to 100m.
AS-I uses constant message lengths. Complicated procedures for
controlling transmission and identifying message lengths or data formats

are not required. This makes it possible for a master to poll all connected
slaves within a maximum distance of 5ms and to update the data, both
on the master and slave.
6.34.1 AS-I-Open Standard for Network Systems at the Process Level
Eleven companies active in the field of binary sensors and actuators
compiled the electrical and mechanical specifications for AS-I. The
specifications are available for companies who are interested in this field. This
makes AS-I an open standard independent of the manufacturer. With the AS-
interface, Siemens provides a system complying with the AS-I standard. The
"Association for Promoting Interfaces with Bus Capability for Binary Actuators
and Sensors" (AS-I Association) is responsible for promoting the application
and dissemination of the AS-I system; in particular the specification,
standardisation, certification and general user information.
6.34.2 AS-Interface/ AS-I System Operation
The AS-interface/AS-I system operates in two steps, namely, (j) Master-
Slave Access Technique and (ij) Electronic Address Setting. The AS-interface
is a "single master system" having only one master per AS-I network, which
controls the data exchange. It sends data to all slaves one after the other and
waits for a reply.
The address of the slave is its identifier, which can be set by using a
special programming and diagnostic device. Once the address for a particular
slave is set, it is stored permanently on the slave. When the data reaches a
slave, it checks whether it is meant for it by decoding the address to which the
master has sent, and then only decodes the actual data.
6.34.3 Operating Reliability and Flexibility
The transmission technique used (current modulation) guarantees high
operating reliability. The master monitors the voltage on the cable and the
transferred data. It detects transmission errors and the failure of slaves and
sends a message to the PLC. The user can then react to this message.
Exchange or addition of slaves during normal operation does not impair
communication with the other stations.

6.35 Foundation Fieldbus
Foundation Fieldbus is a sophisticated industrial network specially meant
for complex distributed control in process plants. The Fieldbus specifications
were developed by the Fieldbus Foundation, a group representing over 80% of
the world's suppliers of industrial automation systems, devices, and services.
Foundation Fieldbus is based upon existing standards and is supported by the
research and development results of the International Society for Measurement
and Control (lSA), the International Electrotechnical Committee (lEC), Process
Fieldbus (Profibus), a German national standard, Factory Instrumentation
Protocol (FIP), a French national standard, and Highway Addressable Remote
Transducer (HART), a widely-used process instrumentation protocol.
The Foundation Fieldbus has two speeds, namely, (i) a low speed of
31.25kbaud, referred to as HI and (ii) a high speed of 1Mbaud or 2.5Mbaud
(depending upon the ac current or dc voltage mode), called H2. A summary of
the characteristics of H1 and H2 is given in Table 6.21.
Table 6.21 Characteristics of H1 and H2
Low speed bus (H1) 31.25 kbaud 3-32 devices that are not bus powered.
2-12 devices that are bus powered.
2-6 devices that are bus powered in an
Intrinsically Safe (IS) area.
High speed bus (H2) 1 mbaud 27 devices, ac current mode (16khz
frequency) powered from a bus in an
Intrinsically Safe (IS) area.
1 mbaud 127 devices, dc voltage mode, not
powered from bus, and no Intrinsically
Safe (IS) area.
2.5 mbaud 127 devices, dc voltage mode, not
powered from a bus, and no Intrinsically
Safe (IS) area.
The Foundation Fieldbus communication protocols are based on the OSI
seven layer communications model. It has optimised the OSI architecture for
process control by removing the middle layers that are generally associated

with non-time critical applications. A comparison of the Foundation Fieldbus
model and the OSI 7-layer communication model is given Fig. 6.34.
Fig. 6.34 Foundation Fieldbus Model Compared to the OSI 7 Layer
Communication Model
As it is seen from the figure, the Foundation Fieldbus system consists of 0)
the physical layer [Layer-l of OSI model], (ii) the communication "stack,"
[consisting of Layer 2 (data link layer)] and Layer 7 (application layer) of the
OSI model] and (iii) user application.
6.35.1 Physical Layer (Layer 1)
The physical layer is based upon standards created by ISA/IEC (ISA
S50.02-1992, IEC 1158-2, which also specifies the capability for intrinsically
safe operation.
6.35.2 Communication Stack (Layers 2 and 7)
The communication stack portion of the Fieldbus process bus network
consists of layer 2 (the data link layer) and layer 7 (the application layer). The
data link layer controls the transmission of messages onto the Fieldbus
through the physical layer. The layers above the physical layer are together
often referred to as the "stack" for the Fieldbus. There are certain specific
characteristics of the data link layer as mentioned in Table 6.22, which are the
key to distributed real-time control actions.
Table 6.22 Characteristics of Data Link Layer
Data link layer is based on a token passing protocol
Link Active Scheduler (LAS) is a centralised device that acts as the
arbitrator of the bus.
LAS executes a schedule that makes deterministic communication
possible.
LAS distributes time to the network to permit all devices to share the
same sense of time.
The application layer contains the Fieldbus Messaging Specification

(FMS) standard, which encodes and decodes commands from the user layer.
The FMS is based on the Profibus process bus standard. Layer 7 also contains
an object dictionary, which allows the Fieldbus network data to be retrieved
either by a tag name or an index record.
The Fieldbus process network uses two types of message transmissions:
cyclic (scheduled) and acyclic (unscheduled). Cyclic message transmissions
occur at regular, scheduled times. The master network device monitors how
busy the network is and then grants the slave devices permission to send
network transmissions at specified times. Other network devices can listen to
and receive these messages if they are subscribers.
Acyclic, or unscheduled, messages occur between cyclic, scheduled
messages, when the master device sends an unscheduled informational
message to a slave device. Typically, acyclic messages involve alarm
acknowledgment signals or special retrieving commands designed to obtain
diagnostic information from the field devices.
6.35.3 User Layer (Layer 8)
The user layer implements the Fieldbus network's distributed control
strategy. It contains three key elements, namely, function blocks, device
description services, and system management. The user layer, a vital segment
of the Fieldbus network, also defines the software model for user interaction
with the network system.
(a) Function Block
The user layer defines "blocks" that represent the functions and data
available in a device. Rather than interface to a device through a set of
commands as commonly used with communication protocols, a Foundation
Fieldbus user interacts with devices through a set of blocks that define device
capabilities in a standardised way. Function blocks are the core components
with which a user specifies the behavior of a control system. Foundation
Fieldbus defines standard sets of function blocks. There is a set of 10 basic
controls and I/O functions as shown in Table 6.23.

Table 6.23 Control and I/O Functions of Foundation Fieldbus
Function Block Name Symbol
Analog Input
Analog Output
Bias
Control Selector
Discrete Input
Discrete Output
Manual Loader
Proportional/Derivative
Proportional/Integral/Derivative
Ratio
AI
AO
B
CS
DI
DO
ML
PD
PID
RA
The inputs and outputs of individual function blocks can be connected to
specify communication of data on the bus. Even more importantly, the
execution of a function block can be precisely scheduled. This is a key
capability of Foundation Fieldbus because it allows execution of control loops
directly over the network. The function blocks themselves reside in individual
devices but the overall scheduling of execution is specified and executed
across the network. Fig. 6.35 shows a simple control loop with three function
blocks – AI, PID, AO.
Fig. 6.35 A Feedback Control Loop with AI, PID and AO Function Blocks
The function blocks shown in Fig. 6.35 could be implemented on the
fieldbus in several different ways. The Al, PID, and AO could reside in separate
devices, such as a transmitter, loop controller and valve. Alternatively, the PID
itself could reside in the control valve. In the second case, there is no explicit
controller device. In either system, the user's view is the same - a series of
connected function blocks and an execution schedule. The second system,
however, shows the true potential of Foundation Fieldbus - distributed control,
where the control function exists in the field rather than being concentrated in
larger controllers.

(b) Device Description Service (DDS)
The user layer of the Foundation Fieldbus has another important feature
i.e. Device Description Service (DDS). A key objective for Foundation Fieldbus
is the ability to build systems comprising devices from a variety of
manufactures, and take full advantage of both the standard and unique
capabilities of every device. Function blocks go a long way in ensuring a
consistent model of a control system. From a system point-of-view, however, a
mechanism is needed to document, in a standard way, the types of functions
available in any given device. To achieve this end, Foundation Fieldbus
defines the Device Description (DD). This is a standardised description of the
functions available in a device. Using the DD, the host in a control system, for
example a Windows NT-based Man Machine Interface (MMI) can obtain the
information necessary to create the human interface for interacting with the
device to configure parameters, perform calibration and diagnostics, and other
functions. DD is a mechanism for describing the functions in a device. This is
the key to field bus interoperability. This can be contrasted to a more simplistic
and common approach to the problem of compatibility and interchangeability,
namely by specifying that only a given set of functions can be used in a device
to ensure that a given system can always talk to a new device. This would
severely restrict the ability of a device manufacturer to innovate by adding new
device features, and there would be a never ending contention about the
"right" set of functions upon which to standardise. With the DD, developers can
add new features and be confident that host systems can learn about and take
advantage of these features in standard way.
(c) System Manager
The system management portion of the user layer schedules the
execution of function blocks at precisely defined intervals. It also controls the
communication of all the Fieldbus network parameters used by the function
blocks. Moreover, the system manager automatically assigns field device
addresses.
6.36 Profibus
Profibus is the leading' open fieldbus system in Europe
(http://www.profibus.com). It is used worldwide in manufacturing, process

control and automation. Profibus is standardised in the German standard DIN
19245 and European fieldbus standard EN 50170. The Profibus User
Organization is engaged in continuous research and development on Profibus
technology.
Fig. 6.36 shows the hierarchy in a Profibus network. In the upper level
the host computer controls the overall system. It is connected to the application
range at cell level and field level through an information network TCP/IP
gateway. At cell level, Profibus FMS is networked with sensors, application
equipment and through PLCs to the field level bus e.g. Profibus DP, Profibus
FMS and sometimes through segment couplers to Profibus PA also. At the field
level, bus, sensors, actuators, transmitters, I/O etc. are connected.
Fig. 6.36 Profibus Network Hierarchy
The general features of Profibus are given in Table 6.24.
Table 6.24 General Features of Profibus
Straight bus topology.
Maximum of 126 nodes.
A token passing between up to three masters.
Length from 9600m/9.6Kbps with 7 repeaters to 500m/12Mbps with 4
repeaters. With fiber optic cables, the lengths can be over 80Km.
Fig. 6.37 shows the protocol architecture of Profubs protocols using the
OSI 7-Layer model. This technology can be used for both high-speed time-
critical data transmission between controllers and I/O, and complex
communications between PLCs. The Profibus family consists of three
compatible versions – DP, FMS, and PA. These three protocols have been
described briefly in the following sections.
Fig. 6.37 Protocol Architecture of Profibus
6.37 Profibus-DP
Profibus-DP uses layers 1 and 2, and the user interface of the OSI model
and layers 3 to 7 are not defined. The Direct Data Link Mapper (DDLM) allows
access between the user interface and layer 2. The user interface specifies

both application functions and device behavior. RS-485 and fiber-optic are
available physical media for Profibus-DP.
This is designed for high-speed, cost-effective communication between
industrial controllers and distributed I/O. Parallel signal transmission with 24V
or 0 to 20mA can be replaced. On such a network, central controllers, such as
PLCs or PCs, communicate with distributed field devices (such as I/O, drives
and valves) via a high-speed serial link. Most of the data communication with
these distributed devices is done in a cyclic manner.
6.38 Profibus-FMS
In Profibus-FMS, layers 1, 2, and 7 are defined. The application layer
consists of Fieldbus Message Specification (FMS), and Lower Layer Interface
(LLI). FMS contains the application protocol and provides the user with a wide
selection of communication services. LLI implements communication
relationship and provides FMS with device-independent access to layer 2.
Layer 2 (FDL Fieldbus data link) implements bus access control and data
security. Rs-485 and fiber-optic physical layers are available for Profibus-FMS.
In general, this is meant for communication primarily between
programmable controllers such as PLCs and PCs. However, its application
layers provided with a user communication service make it possible to access
variables, transmit programmes, and control programme execution, as well as
transmission of events. Profibus-FMS defines a communication model in which
distributed application processes can be unified into a common process by
using communication relationships.
6.39 Profibus-PA
Profibus-PA is specifically designed for process control and automation,
using the international fieldbus standard physical layer, IEC 1158-2, for bus-
powered sensors and actuators to be operated in 'intrinsically safe areas. It
uses the extended Profibus-DP protocol for data transmission. Profibus-PA
devices can be integrated in Profibus-DP networks using segment couplers.
The Profibus's medium access protocol is a hybrid communication method
that includes a token-passing protocol for use between masters, and a master-
slave protocol for communication between a master and a field device. Through

this hybrid medium access protocol, a Profibus network can function as a
master-slave system, a master-master system (token passing), or a
combination of both systems as shown in Fig. 6.38.
Fig. 6.38 Master-slave and Master-master Profibus Communication
6.40 Application of Profibus for Real PLC Communication
(a) Overcoming Language Barriers between Devices with FMS
Data transmission via a configured FMS connection is suitable for the
transmission of structured data between two Profibus nodes that support the
FMS standard.
The great advantage of this FMS protocol is that data structures can be
transferred in a neutral format, in other words in a format that is not dictated by
any particular end device. This data is then converted to the format required by
the end device. This means that one can communicate with all devices that
understand the FMS protocol. In the user programmes of the end devices, one
can therefore use "Device Language", for example Statement List for SIMATIC
S7/SIMATIC M7 PLCs and C for the PC application.
(b) FMS Interface and FMS Master System
Data is transmitted on an FMS connection when triggered by the user
programme. Special SIMATIC S7 Function Blocks (FBs) form the interface to
the user program on the SIMATIC S7 programmable controller. Function blocks
are available for the following tasks as shown in Table 6.25.
Table 6.25 Function Blocks in 51MATIC 57 Programmable Controller
Task Function Block (FB)
Read variable READ
Write variable WRITE
Report variable REPORT
Coordination ACCESS
General VFD services IDENTIFY
STATUS
On the Profibus, devices are divided into masters and slaves. The right of

access to the bus is known as tile token, and it is passed on from master to
master. The slaves can only react when requested to by a master. In terms of
the functionality of an FMS device, a further distinction is made between the
following:
FMS client: The FMS client requests a service; assuming that it is a
master on the Profibus.
FMS server: The FMS server provides the requested service; both a
master on the Profibus as well as a slave on the Profibus can act in the role of
a server.
An FMS master system is formed by all the devices with FMS
functionality on the Profibus Subnet. This means that several FMS masters can
access the same slaves.
In contrast to this system, with distributed peripheral I/Os (DP) there are
additional assignment criteria with which all, or a subset of the DP slaves on
the subnet can be assigned to a DP master. In other words, several DP master
systems are possible.
(c) Virtual Field Device (VFD)
A device operating on Profibus and complying with the FMS norm is
generally known as a Virtual Field Device (a field device with an open
communications interface).
Fig. 6.39 FMS Connection of an S7 VFD to any Device with an FMS Interface
The FMS services implemented on the Profibus Communication
Processor (CP) ensure that the data are converted from the PLC format to the
neutral FMS data format and vice-versa.
(d) Properties of the FMS Connection
An FMS connection allows programme-controlled communication between
two nodes on the Profibus with the following properties:
Data transfer is bi-directional, in other words, it is possible to send
and receive simultaneously on the FMS connection.
Data is transferred using the FMS services complying with the

standard. The services are negotiated between the communication
partners automatically when the connection is established. The user can
specify the services required on the Profibus Communication Processor
(CP) during configuration.
The data are transmitted on the FMS connection in the FMS format
as specified in the standard.
Depending on the services used on the FMS connection, a VFD
functions as the FMS client, as the FMS server or performs both roles.
FMS client: The FMS client requests a service; this assumes that
the device is a master on the Profibus.
FMS server: The FMS server provides a requested service; both
masters and slaves on the Profibus can act as servers.
(e) Tasks of the Profibus CP
The Profibus CP is responsible for the following tasks when handling the
data transfer on an FMS connection:
Receiving data from the Profibus, converting the data from the FMS
representation to the particular representation required by the device and
passing on the data to the user data area on the CPU.
Accepting data from the user data area of the CPU, converting the data
to the FMS representation and sending the data on the Profibus.
The Profibus CP must first be entered in the hardware configuration of the
PLC and must be connected to the subnet.
(f) The FMS Interface in the User Program
When the user writes the user programme, the user must start with
configuration of FMS connections. The FMS connections are established when
the Profibus CP starts up; the user programme is not involved in the way that
the connections are handled.
The return parameters on the FMS interface (FBs) give information on
the status of the FMS connection.
(g) Principle Writing, Reading and Reporting Data with Function
Blocks (FBs)

The Function Blocks (FBs), given in Table 6.26, are available for
handling communication on FMS connections for Siemens S7-300/400 PLCs.
Table 6.26 FBs in S7-300/400 PLCs
FB Function/Method of OperationsWRITE The user data referenced in the cell are converted to the FMS
representation and transmitted. The conversion is made
according to the variable description stored on the partner
and read during connection establishment. The data transfer
is confirmed by the FMS server.
READ The data area referenced by the FMS client in the job is
converted to the FMS representation in the FMS server and
transferred to the FMS client as the response.
The data is reconverted on the FMS client according to the
variable description read from the FMS server during
connection establishment.
REPORT The user data referenced in the call are converted to the FMS
representation on the FMS server according to the configured
variable description and transferred.
The user program does not receive confirmation of the data
transfer.
The data are reconverted on the FMS client according to the
variable description read from the FMS server during
connection establishment.
The schematic diagram in Fig. 6.40, illustrates how these function blocks
work; the arrows indicate the direction of flow of the user data.
The performance of control systems is no longer simply determined by
the PLCs, but is influenced to a great extent by the environment in which the
PLCs are located. Apart from plant visualization, operating and monitoring, this
also means a high performance open communication standard, which can
converse with the products of almost all vendors. In process automation,
complex control tasks are subdivided into smaller tasks with different
distributed systems. As a result, efficient communication between the

subsystems is an absolute necessity. Such structures have some unique
advantages, which are listed below.
1. Independent and simultaneous startup of the individual sections of a
plant.
2. Parallel processing by distributed automation systems.
3. Reduced load on individual processing units.
4. Increased plant availability since the rest of the system can continue
to operate if a subsystem fails.
Fig. 6.40 Service Request and Data Flow Between FMS Client and FMS
Server
This chapter gives a vivid picture of open communication standards for
devices and processes. In the next chapter, Programmable Logic Controller
based solutions of some industrial automation problems have been attempted.