Control of the Wave Equation by Time-Dependent Coefficient · PDF filetransformation. There...
23
Control of the Wave Equation by Time-Dependent Coefficient Antonin Chambolle Fadil Santosa Abstract We study an initial boundary-value problem for a wave equation with time-dependent soundspeed. In the control problem, we wish to determine a soundspeed function which damps the vibration of the system. We consider the case where the soundspeed can take on only two values, and propose a simple control law. We show that if the number of modes in the vibration is finite, and none of the eigenfrequencies are repeated, the proposed control law does lead energy decay. We illustrate the rich behavior of this problem in numerical examples. 1 Introduction The problem considered in this work is motivated by recent developments in the area of smart materials. The properties of these materials can be changed by the application of external fields, such as electrical, magnetic, or temperature. When external fields are applied, the material goes through what is known as a phase transformation. There are magnetostrictive materials whose stiffness can be altered by what is refered to as the effect [7]. A structure made with such a material, together with a sensing system that is capable of measuring deformation in the material, is considered. The control problem consists of eliminating a transient disturbance in the structure by varying the material property in response to the deformation. In this work, we consider a simple model problem with the attributes of the more complicated structural control problem described above. The model dynam- ics is governed by a scalar wave equation. The control variable is the soundspeed CEREMADE, CNRS UMR 7534, Universit´ e de Paris-Dauphine, 75775 Paris Cedex 16, France, [email protected] School of Mathematics, University of Minnesota, Minneapolis, MN 55455, USA, san- [email protected] 1
Transcript of Control of the Wave Equation by Time-Dependent Coefficient · PDF filetransformation. There...

Control of the Wave Equation byTime-Dependent Coefficient
Antonin Chambolle�
Fadil Santosa�
Abstract
We study an initial boundary-value problem for a wave equation withtime-dependent soundspeed. In the control problem, we wish to determine asoundspeed function which damps the vibration of the system. We considerthe case where the soundspeed can take on only two values, and propose asimple control law. We show that if the number of modes in the vibrationis finite, and none of the eigenfrequencies are repeated, the proposed controllaw does lead energy decay. We illustrate the rich behavior of this problemin numerical examples.
1 Introduction
The problem considered in this work is motivated by recent developments in thearea of smart materials. The properties of these materials can be changed by theapplication of external fields, such as electrical, magnetic, or temperature. Whenexternal fields are applied, the material goes through what is known as a phasetransformation. There are magnetostrictive materials whose stiffness can be alteredby what is refered to as the ��� effect [7].
A structure made with such a material, together with a sensing system thatis capable of measuring deformation in the material, is considered. The controlproblem consists of eliminating a transient disturbance in the structure by varyingthe material property in response to the deformation.
In this work, we consider a simple model problem with the attributes of themore complicated structural control problem described above. The model dynam-ics is governed by a scalar wave equation. The control variable is the soundspeed�CEREMADE, CNRS UMR 7534, Universite de Paris-Dauphine, 75775 Paris Cedex 16, France,
[email protected]�School of Mathematics, University of Minnesota, Minneapolis, MN 55455, USA, san-
1

in the medium, which is assumed to take on only two values. We propose a simplecontrol mechanism based on knowledge of the time rate of change of the potentialenergy in the system.
Even for this simple model problem, we found that the behavior of the problemunder the proposed control law is quite rich. We begin the paper by presentingour model in the next section. Section 3 is devoted to the analysis of controlingthe vibration of a single mode. While the results are of limited utility, we foundthat the behavior of this simplified dynamics to be instructive. In Section 5 weinvestigate the dynamics of the full problem for existence. We show that undersomewhat stringent conditions similar to [6], we are able to prove global existence.The control problem is analyzed in Section 4 for the case where there is a finitenumber of modes present in the initial disturbance. We establish energy decayproperties under the control law. The behavior of the system, in particular, themode mixing properties, are examined in numerical calculations.
Finally we note that the problem considered here is different from the con-trol of structures by a system of smart material sensors and actuators. The smartmaterial can be piezo-electric, in which case, the governing equations consists ofa coupled set of dynamic elasticity equations and electromagnetic equations. Thecontrol problem then consists of analysis of the dynamics of bi-material body madeup of elastic and piezo-electric materials. The study of such problems have beenexplored in numerical simulations in [3]. Other problems of this type are discussedin [2, 4]. Our problem is more similar in nature to the dynamic composite materialstudied by Lurie [5], although our material is much simpler, and perhaps easier torealize.
2 Model
We begin with the wave equation in ������������� ������������ ������� � �!� � (1a)
where �"��������� is the disturbance at position � and time � . The wavespeed # ������is assumed be a function of time. For simplicity, let � satisfy Dirichlet boundarycondition �����������$����� for � �!%&�(' (1b)
Initial conditions for � are
�"�������)�*���,+-�����.�/� � �������)���0�213���4� ' (1c)
2

Associated with the wave equation (1a) is the energy
� �����$���������� �,� ����������� �� �������� � ������������� ����-���-� ' (2)
The definition of energy follows that of the standard case where the coefficient is not a function of time. We recognize that this definition is somewhat arbitrarybecause for the PDE under consideration, energy is not a conserved quantity.
We assume that the material property &����� can only take on two values
������$��� 1 � (3)
where 1�� . Later, we may smooth ������ so that the transition from values 1 to is a smooth function. The control problem is to assign the function ������ of theform (3) such that �"����������� � as ����� .
An optimal control associated with this problem is one where we consider afinite horizon � ��� ��� ��! (or infinite horizon), and we may attempt to find &����� inthe class (3) which minimizes, say,
�#"+ � � �$�� � � ��� ����� �%�� &������� � ����� ������� �&�)�'�)� 'The solution will be dependent on the initial conditions � + ����� and ��13����� in (1c).Instead we will derive a simple control law based on integrations-by-parts.
We multiply both sides of (1a) by ������������� and integrate over the domain � . Weobtain ��-� � �)( �� �,� ��������� �* �)� �,+ ������ ��-� � �-( �� � � ������������� �* �-� 'The integral on the left-hand side is just the kinetic energy, whereas the integral onthe right-hand side is a scaled potential energy. Therefore, we choose our controlto be such that kinetic energy is decreasing when possible, and made as small aspossible when not. The control is
������$� � 1 if .. ��/ �10 1 � � �"����������� 32 �)� � � if .. ��/ �10 1 � � �"����������� 32 �)� ��� ' (4)
Note that we have left open the control for when the potential energy is zero. Thisturn out to have interesting consequences, as we shall see in Section 4.2.
The remainder of the paper is devoted to determining if the control stated in (4)leads to decay of energy in the system. Before we proceed, we note that formally
3

we can pose the problem at hand as a control problem for an infinite system ofordinary differential equations by using modal expansion. Let us write
����� �����*� ����� 1�� � ������� � �����.�
where � � ���4� are normalized eigenfunctions associated with eigenvalue � � . Thus,we have �� � � � � � � ����� � �!� � � � �����$��� for � ��%&�('Then, � � ����� satisfy � � � ������ � � � � ����� �!� � � � � � � � ' (5)
The initial condition for � � are� � � �)�*� � + � � �� � � �)�*� � 1 � 'The energy associated with the system is
� �����$� �� ����� 1 �� � ����� � ������ � � � � ����� ' (6)
The equivalent control law for the Fourier coefficients is
������$��� 1 if .. ��� ���� 1����� � � ����� � � if .. � � ���� 1 � �� � � ����� � � � (7)
which can be derived directly from the infinite system of ordinary differential equa-tions (5).
3 Control of one mode
We can obtain an explicit solution for the control problem when the initial dataconsists only of one mode. Let the initial data in (1c) be (for simplicity)
���������)����� � ���4�.� �� ��� ���)�*�0� 'Then the ODE associated with the mode amplitude is� � � ������ � ��� � �����
4

with initial condition � � � �)�$� � and �� � � �)�$��� . The control law for ������ is
&�����$� � 1 if � � ����� �� � ����� � � if � � ����� �� � ��������� � (8)
after some simplification.The solution for constant can be given in terms of a propagator
� � ��� � � ��� � � ���*� � ������ � � � � ��� �� � � ��� �� � � �+ � � � ����� � � � � � ����� � � � � ��� � � ��� � � ����� ' (9)
Since ������ will be piecewise constant, we will make use of this formula.For ��� � and small, �� � ����� will be negative. Therefore, the control law (8)
assigns ������$�0 1 (recall that 1�� ). Hence, we have� � �����$� ����� � 1 � � � � �� � �����$�,+ � 1 � � ����� � 1 � � � 'According to the control law (8), the first instance where ������ will switch to is at ��1 , at which point, � � � ��1 � � � , and � � � ��1 � � � . We easily find �"1 ���� � � � 1 � � � . Thereafter, for � � � 1 , we again use the propagator equation (9)with � to find � � ����� and �� � ����� . The next switch, from to 1 occurs at � ,where � � +�� 1 � � ��� � � � � � � . We can evaluate � � and �� � at � , � 1 , and � ,using the propagator matrix:� � � �)�$� � � �� � � �)�*������ � � � 1 � ����� �� � � �)�*�,+ � 1 � � �� � � � � �,+ � 1 � � � �� � � �)�*��� 'The next two times when ������ switches can be found from following the signs of� � ����� and �� � ����� and the recipe in (8). They are at � � and �"! where �#�(� ��1 � � ,and � ! � � � . The values of � � and �� � at these times are� � � �#�3�$����� �� � � �#�3� �� 1 � � � � �� � � � ! �$�� 1$� � �� � � � ! � ��� '
We can calculate the energy defined by (6) and find that
� �����$�� 1 � �� � for � � � � � �� �����$�� 1 � � � for � � � � � ! '
5

0 2 4 6 8 10 12 14 16 18 20−1
−0.5
0
0.5
1
t
c n(t)
0 2 4 6 8 10 12 14 16 18 20
0
1
2
t
a(t)
0 2 4 6 8 10 12 14 16 18 200
0.5
1
1.5
2
t
E(t
)
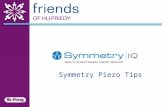
Figure 1: Energy decay for a single mode where 1 � � , � �, and � � �
. Top:Fourier coefficient � � ����� . Center: the control parameter ������ . Bottom: The energy� ����� .The upshot is that by using the control law, we have reduced the initial energy by afactor of 1 � by the time �$� � . Repeating this argument allows us to concludethat the energy decreases by this factor every time interval � ; i.e.,
� � � � �$�� 1 � � ( 1 *� � � � � � � � � � � '
We can generalize the argument to lead to the same conclusion for any initial data.Moreover, ������ is a periodic function of period � .
We give an illustration of the energy decay of the single mode case in Figure 1.We next demonstrate that for the one-mode case, the control law (8) is indeed
optimal for an infinite horizon control problem. Let us first rewrite the ODE as asystem �� � � � � �+ ������ � � � � � � �with initial data
� � � �)� � � � � � � � �)�.� �� � � �)��� . The the optimal control problem isthe minimization � ���4�$� �������� � � �+ � ����� �-� (10)
6

( 1 , 0)
( 0 ,− α )
c
cn
n
.
B
O Ac
cn
n
.
O B
( β 0),
)1,0(A
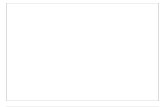
Figure 2: (a) The trajectory starting from � � ���)� . (b) The trajectory starting from� ��� � � . In both cases, optimality requires the area ����� to be as small as possible.
where � ����� defined as in (2), � ����� � �� � ����� � � � ������ � � � � ����� � � . By linearity ofthe equations,
�is even and homogeneous; i.e.,
� ��� �4�$��� � ���4� for every � ��� and � � � .
Associated with (10) is a dynamic programming principle, that is, for every� � , � ��� � ���4�$� ��� ���� � � ���+ � ����� �-� � � � � � � � ��� '
With initial data � � � � ���)� , in the phase plane, the trajectory starting from �will live in the fourth quadrant until it reaches a value
� � � � �$� � ��� +��"� at a certain“exit” time � . Thus,
� ��� � ���)����� �������� � � � �+ � ����� �-� � � ��� ��� +��"��� or by the homogeneity and evenness of
�,
� ��� � ���)����� � ���� � � � ���+ � ����� �)� ��� � ��� ��� � ��� � (11)
with � � � � � �%+�� and �� � � � � � � . A sketch of the trajectory is given in Figure 2awhere the starting point at � � � is ��� � � ���)� , and the first exit point at � � � is��� � ��� +���� .
Now, we study the integral / �+ � ����� �)� where � is the time where the trajectoryreaches ��� � ��� +���� . We have
� � � � � � � �� � � and for ������� � , � � goes from 1 to
7

0 while �� � goes from 0 to � . The integral is
� �+ � ������-��� � �+ �� � ����� � �-� ��� �+ ������ � ��� � ����� � �-� 'In the first integral we make the change of variable � � � � ����� , � � � �� � ����� �-� . Itbecomes
1 / +1 �� � � � � 1� � � ��� � � , which is half the area inside ����� .In the second integral the change of variable is � � �� � ����� so that � � �,+ &����� � ��� � ����� �-� .
It becomes + 1 / +1 � � ���� � 1� � � ��� � � and gives the same value as the first one. Thus/ �+ � ����� �)� is the area ����� .At every point on the trajectory ��� , the velocity vector is�� � � ���� � � + � � � � �.�
with � � ��� , and �� � � � . Therefore, to make the area ����� as small as possible,we choose the velocity so that the second component is as small in magnitude aspossible, i.e., by choosing �� 1 . With this choice, we can easily calculate � and� , � � + � 1 � 1 � and � � �� � 1 � � 'The choice �� 1 , with the resulting � , minimizes the functional in (11). We alsofind ���+ � ������-�*� � � � � 1� 'Thus, we obtain � ��� � ���)����� � � � � 1� � 1 � � � ��� ��� � ��� ' (12)
We proceed by computing
� ��� ��� � ��� with the same method,� ��� ��� � ����� ��� ���� � � � �+ � ����� �-� � � �����$���)��� '
For this case, the starting point in the trajectory is� � � �)� � � ��� � � , and the tra-
jectory is in the first quardrant (see Figure 2b). The exit time � is the first timewhere �� � vanishes, ie., at point � . Along path � � , both � � and �� � are positive.Again,
� ��� ��� +��"������� � ��� ��� � ��� , and the same study shows that the optimal pathminimizes the area � ��� , obtained by choosing ��0 .
Further calculation reveals that � � � � � � 1 � � � , and � � ��� � � � � � � , lead-ing to / �+ � ����� �-�*� � � � ��� � . We conclude that
� ��� ��� � ����� � � � � � � � � �� ��� ��� � ��� ' (13)
8

We can solve for
� ��� � ���)��� from (12) and (13)� ��� � ���)����� � � � � 1� � � + 1$� � � � � � 1 � � � 'The energy is finite, and our construction shows how to assign ������ to obtain theoptimal control. Notice that the exit time for initial data coincides with the time � 1 ,and the exit time for initial data coincides with the time � + � 1 at the beginning ofthis section. From this, we can see that the assignment of &����� is identical to thatin the beginning of the section. Thus we can conclude that for the one-mode case,the control law we introduced in (8) is optimal. Moreover, although we have onlyconsidered the initial value � � � � �)�.� �� � � �)��� � � � ���)� , the dynamic programmingprinciple shows that in fact our control law is optimal independently of the initialvalue � , for minimizing the criterion (10).
4 Control of multimodal vibration
While it is satisfying to know that the control law (7) is also the optimal control foran infinite horizon problem in the case of one mode, it is not at all clear that thecontrol even leads to damping when there are more modes. In the case of multiplemodes, mode mixing makes any kind of explicit analysis impractical. We resort toan energy bound, and show that the bound goes to zero as � � � , provided that� � are all distinct. In doing so rigorously, we assumed that the initial disturbanceconsists of only a finite number of modes. The proof is given in Section 6, andwe discuss the obstruction preventing the proof of the same result in the case ofinfinite modes in the final discussion section. The present section is devoted toformal justification of the control and numerical experimentation with the control.
4.1 Formal justification
We begin by defining the kinetic energy and a measure of the potential energy
��� �����*� ����� 1 �� �� and
���� � ��
��� 1 � � � �� ' (14)
We use the function � � � �$��� 1 if � � � if � ��� �
to define the control law. The governing equations for the Fourier coefficients � � �����are � � � ��� ��
��� 1 � ��� � �� ��� � ��� � ����� � � � � � � � � � �9

subject to initial conditions. Identifying the argument of� � � � with .. � �� � , we see
that� � � � ( ��-� �� � * � � � � ��� ' (15)
We choose � to be the mean
� � 1 � � � (16a)
and define a kind of energy
� � �����$� � � ����� � � �� � ����� ' (16b)
We observe that ��)� � � � ��-� ��� � � ��-� �� �� ����� + �� �
� � � � � � � � �� �� � � + � ( ��-� �� � * � ��-� �� � �
after using (15)and (14). If .. � �� � � � , � �� 1 , so that .. � � � ����� � � . If on the otherhand .. � �� � � � , � � , and in that case, we still have .. � � � ����� � � . Therefore,we conclude that ��-� � � ��� ' (17)
When ������$�� 1 , we can bound � ����� from below by considering, for� ��� ,
� � � �����*� ����� 1 � � �� � � � � ( 1 � � * � � � � '
Choosing� � � 1 � � 1 � � � � gives us� 1
1 � � � ����� � � ����� 'A similar argument gives an upper bound. The energy (6) therefore satisfies aglobal bound � 1
1 � � � ����� � � ����� �� 1 � � � ����� ' (18)
The results in (17) and (18) are the ingredients needed to establish that the sys-tem is damped. The latter imply that the energy in the system is bounded above,
10

and below, by a nonincreasing ‘weighted’ energy � � ����� . It remains to be shownthat the only limit of � � ����� is zero. We are indeed able to demonstrate this factwhen there are a finite number of modes present in the vibration, and the frequen-cies � � are distinct. We defer demonstration of this fact to Section 6, after we haveestablished well-posedness of the initial value problem in Section 5. In establishingthe result, we replace the function
� � � � in (15) with a Lipschitz funtion. In the nextsubsection, we will study the behavior of the damping in numerical experiments.
4.2 Numerical examples
In order to obtain detail behavior of the wave equation with the control law thatwe proposed, we consider the discrete dynamical system given by (5) with time-dependent coefficients given by (7). We assume that we have a finite number ofmodes with frequencies � � ��� � � � � � � � � � � � ��� 'Note that we do not have repeated eigenvalues since as we will show later, thecontrol law we prescribed does not work when there are repeated eigenvalues. Thematerial properties are chosen to be �1 � � , and � � . The latter chosen largein order to have large damping. The differential equation is first rewritten as a firstorder system. In all our examples, we take � ��� � , but to capture the dynamicsaccurately, we take small time increments � � � � � � � � ����� � � � . That is, if� ��� � , the shortest period in time is sampled at 100 points. Within this timeincrement, &����� is assumed to be constant. With &����� piecewise constant, we canuse the propagator method (9) to evolve the dynamics, using the control law (7) tochoose ������ .
It must be pointed out here that the control of assigning
�� 1 if��)� �� � � ��� and �� if
��-� �� � �����leaves the choice of ambiguous when .. � �� � � � ; we will simply say that �%� 1 �� ! when this happens. As we shall see shortly, this turns out to haveinteresting consequences. The fact is that .. � ���� can be very small. If it is smalland positive, then is assigned, leading to a small and negative .. � �� � in the nexttime increment. Then 1 is assigned, leading to .. � �� � small and positive in the nexttime increment. Thus ������ oscillates while at the same time
�� � is nearly constant
over a time interval. This oscillation will be more rapid as we take smaller timesamples – an averaging phenomenon. The system is attempting to take choose avalue for ������ which is in the interval � 1 �� ! by rapid oscillation. In this sense, the
11

0 0.5 1 1.5 2 2.5 3 3.5 40
10
20
30
t
E(t
)
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
t
a(t)
Figure 3: Random initial data with 20 modes. Top: Energy vs. time. Overplottedare the upper and lower bounds in (18). Bottom: Control coefficient vs. time.Black out regions correspond to rapid oscillations.
calculations must be interpreted as an approximation of the continuum problem.The limit behavior of &����� as the time increment goes to zero is some kind of localaverage of the rapidly oscillating solution.
In all the examples, the initial velocity of each mode is set to zero; i.e., �� � � �)�$�� .Example 1 In the first example, we take � � � � , and set � � � �)����� � � where � isa random number in the interval � + � '�� ��� '�� ! . Figure 4(top) shows the decay in theenergy � ����� . In the solid black parts of the curve, the energy is rapidly oscillating.Shown also are the upper and lower bounds for the problem as predicted by (18).We also display the control &����� in Figure 4(bottom). Again we have rapid oscilla-tion in &����� which reflects the system’s attempt to achieve between 1 and byrapid oscillation.
Example 2 We choose � � � with � � � �)� equal to zero except for � 1 � �)�$� � � � �)�$�� . The example is designed to show the damping mechanism. The system isevolved over the time interval � ��� � ! . In Figure 5(top) we show the energy decayas a function of � . The corresponding time-dependent coefficient ������ is shown inFigure 5(middle). Note also the self-similar nature of the coefficient and the energyplots. Plots of the coefficients � 1 ����� and � � ����� are given in Figure 5(bottom). It canbe seen that the higher frequency disturbance is damped more quickly than the lowfrequency component.
Example 3 In this example, we investigate the behavior of the system to smoothing
12

0 0.5 1 1.5 2 2.5 3 3.5 4−5
0
5
10
t
log
E(t
)
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
t
a(t)
0 0.5 1 1.5 2 2.5 3 3.5 4−1
−0.5
0
0.5
1
t
c n(t)
Figure 4: Demonstration of damping with 2 modes. Top: Plot of ����� ����� . Middle:
Plot of &����� . Bottom: Plot of � 1 ����� and � � ����� . Note the self-similar nature of thecontrol and the logarithm of the energy after some of the high frequency componenthas been damped.
of the control law. The initial data is � � � �)� � � � � , for � � � � � � ��� � � . First wesolve the problem with control law (7). Next, the problem is solved with controllaw
� � ( ��-� � � � � � * � � � � �*� �� � � 1 � � � � + 1 ����� ��� � � � � ! 'with
� � � '�� and� � � ' � � . The control law (7) is the formal limit of the above
as� � � . The effect of
�is to smooth the transition between 1 and . What
we observe is that both the coefficient ������ and the energy � ����� becomes smoother(especially at later times when the high frequency information has been damped)as we make
�smaller. We display this behavior in Figures 6 and 7. We believe
that there is a homogenization phenomenon inherent in the process, and that a limitbehavior may be possible to characterize.
13

0 0.5 1 1.5 2 2.5 3 3.5 42
4
6
8
t
log
E(t
)
0 0.5 1 1.5 2 2.5 3 3.5 42
4
6
8
t
log
E(t
)
0 0.5 1 1.5 2 2.5 3 3.5 42
4
6
8
t
log
E(t
)
Figure 5: The effect of smoothing the control law: plots of ����� ����� . The control � � � .. � �� � � , see (14). Top:
� � � � is binary: 1 or . Middle and bottom:� � � � is
a smooth, and smoother, function of � .
5 Existence of solution
We will study the existence of solutions for our problem in the case where theequation is of the form� � � ��� ��
��� 1 � � � � �� � � � � � � ����� � � � � � � � � � � (19)
with given initial values � � � �)�.���� � � �)� , � � , but now�
is a nondecreasing Lipschitz–continuous function, such that
����
��� � � � � � �$�� 1 � ����
����� � � � � � �� � and� � 1 � �"�$����� (20)
where � � � 1 �! � � � . We denote by�
the Lipschitz constant of� � � � – ��� �� ��
.
14

0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
t
a(t)
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
t
a(t)
0 0.5 1 1.5 2 2.5 3 3.5 40
1
2
3
4
5
t
a(t)
Figure 6: The effect of smoothing the control law: plots of &����� . Top:� � � � is
binary: 1 or . Middle and bottom:� � � � is a smooth, and smoother, function of
� .
5.1 Finite number of modes
We consider first the case where all but a finite number of modes are zero. Forsimplicity we can consider just the first � modes ( � � ) of the system. In thiscase, the existence of a solution is obvious, and given by the Cauchy–Lipschitztheorem. We let
� ���� � 1
...�������
where for every � � � � ' ' ' ��� ,
� � � ( � � � ��� � * 'Then, the equation is
�� � � � � where the transformation � � � multiplies thecomponent
� � of the vector�
by the square matrix� � � � �+ ��� � � � 1 � � �� �� � � '15

It is clear that is locally Lipschitz-continuous, hence for every initial data� +
associated to a set of initial values � 1 � �)�.���� 1 � �)�.� ' ' ' � � � � �)�.���� � � �)� , there exist amaximal interval � ��� �(��� � ��� � � � and a solution
� ����� satisfying the equation on� ��� �(� , with� � �)�*� � +
. Notice that this solution is also unique.In order to show that � � � � it is enough to show that the solution
� �����remains bounded for every finite � . Clearly, � � � � � � � � � ��� � � � � for every� � � � . Hence by Gronwall’s lemma � � ����� � ����� � � ��� � � + � , with
� �� � � ��� � , showing that ��� � � . In fact, for every � � and � � we have�� � ����� � � � � � ����� ��� � � � 1� � � � � 0 �� � � �)� � � � � � � �)� 2 ' (21)
5.2 Infinite number of modes
If the number of modes is infinite, the existence of a solution is less straightforward.We can show two different results:
� an existence result for small time, for an initial data with some regularity;
� an existence result for all times, but requiring very strong regularity hypoth-esis on the initial data � + ����� and � 1 ����� , requiring them to be analytic.
The proof is based on a Galerkin approximation method, as in [6] (see also[1]). We consider a set of initial data � � � � �)�.� �� � � �)��� ���� 1 . For every � � , wedenote by � � �� ������� ���� 1 the solution with � modes corresponding to the initial data� � � � �)�.���� � � �)��� ���� 1 . For every � , let
� �����*� � � �� � 1 � � � �� � � � (22)
and for every� � let
� �� ����� � ����� 1 � �� 0 �� �� ����� � � ����� � � � �� ����� 2 '
We also let� � � ��
��� 1 � �� 0 �� � � �)� � � � � � � �)� 2 'Our first result is the following:
Theorem 1 Assume� 1 � � � . Then there exists a time � � � � � 1 � � 1 , and
a solution of (19) on � ��� � � � . Moreover, the coefficient� 0 � ���� 1 � � � � �� � 2 of the
wave equation is continuous in time on � ��� � � � .16

Proof First, we differentiate� �� ����� ,� � ���)� �
����� 1 � �� 0 � � �� �� �� � � � � � �� �� � �� � � � � � � � �� � 2 '
Since
� �� �,+ � � � � �� , the expression simplifies to� � ���-� ������ 1 � � � � � � � � �� � '
We proceed by differentiating � ����� in (22)� � � � � � �� � 1 � � � �� � � ����� 1 � � 0 ���� �� � � � �� � �� 2 �
� � � � �� � 1 � � � �� � � ����� 1 � � 0 ���� �� � + � � � � � �� � 2 '
We deduce that for every� � ,� � ���)� ����� � � � �1 ����� � �� �����.� (23)
where�
is the Lipschitz constant of�
.First assume that
� 1 � � � . For every � , we have� �1 � �)� � � 1 . Choosing� � � in (23) we get that
�� �1 � � � � �1 � , hence
� �1 ����� � � �1 � �)�� + � � �1 � �)� � �as long as � � � � � �1 � �)��� � 1 . In particular, if � � � � � � � � 1 � � 1 , we see that
� �1 ����� � � 1� + � � 1 � � � ��� (24)
for every � � .We want now to send � to infinity. We first notice that there exists a subse-
quence of � � � � � 1 , that we will still denote by � , and a function � � � � � ��� � � �.� � 1 �� !��such that � goes to weakly- � in
� � as � ��� � .For a fixed � � , since inequality (21) is valid for � � �� � �� �� � as soon as � � ,
we see that � �� , �� �� , and
� �� � + � � � � �� are bounded uniformly in � on theinterval � ��� � � ! . Hence we may assume (possibly extracting a further subsequence)
17

that � �� and �� �� converge uniformly in � ��� � � ! as � � � to respectively � � and�� � , where � � is the (unique) solution of� � ����� � � � &����� � � ����� � ���with initial values � � � �)� , �� � � �)� .
Now, by (24), we see that for every � � � � , � �1 ����� is bounded uniformlyin � . Hence (letting � �� � � whenever � � � ), both vectors � � � �� �� ������� ���� 1and � � � � �� ������� ���� 1 are uniformly bounded in � ����� as � goes to infinity. We de-duce easily (since � � � � � as � � � � ) that for every
� � � , � � 1 � �� �� �� ������� ���� 1converges strongly in � ����� to � � 1 � �� �� � ������� ���� 1 , as well as � � � �� � �� ������� ���� 1 to� � � �� � � ������� ���� 1 , as � ��� .
In particular, the scalar product����� 1 � � � �� ����� �� �� ����� ����� � ��� � � �� � ���� 1 �3� � 1�� � � �� � ���� 1�� �
converges, as � � � , to � ���� 1 � � � � ����� �� � ����� , and since�
is continuous we de-duce that for every � � � � ,
&�����$� ��� ����� 1 � � � � ����� �� � ����� � '
This shows the existence of a solution to our problem, for � � � � � � � � 1 � � 1 .Notice furthermore that since
��-� � ����� 1 � � � �� �� �� � �
����� 1 � � 0 ���� �� � + � � � � � �� � 2 � � �1 �
which, by (24), is uniformly bounded on every interval � ��� ��! , � � � � , the conver-gence of � ���� 1 � � � �� �� �� to � ���� 1 � � � � �� � is in fact uniform on every such interval.This shows that this function, as well as &����� , is in fact continuous in time. Theo-rem 1 is proven.
The next result is the following.
Theorem 2 Assume� + � � � , and assume that the initial data satisfies �
� � ����� � � � � � � � 1�� � � � �� � . Then there exists a solution of (19) on � ��� � ��� .Proof We essentially follow the proof of Pohozaev [6] for a similar problem. InSection 4.1, equation (16a)–(16b), we introduced the energy
��
������ �
����� 1 ��
�� ����� � � � � � � �� ����� � '
18

We have that � � ���-� ����� � � � + � ������� ����� 1 � � � �� ����� �� �� �����.�
and since � � � � � ���� 1 � � � �� �� �� � and ���� � � + � � � ��� � is always negative(except at � ��� where it vanishes), we deduce that �
������� is nonincreasing. Hence
��
�������� � �� � �)� for every � � , and we deduce the following estimate, valid for
every � � and � � : � �+ ����� � � � � � + ' (25)
Now, by Holder’s inequality,
� �1 ����� �/� � �+ ������� 1 � �� � � �� ������� �� � (26)
for every� � and � � . Recalling (23) and (25), we find that for every
� �and � � , � � ���-� ����� � �� � � + � 1 � �� � � �� ������� 1 � �� ' (27)
We assume (as is natural) that� +#� � � and let � � � � � � � + � � � . Com-
puting the time–derivative of � � �� � � 1�� � we deduce from (27) that as long as � �� � � � �� � �)��� 1�� � � � � � 1 ,
� � �� ������� �� � � � �� � �)��� ��� + � � ���� � + � ��
�� � '
Hence, for every � � ,� � , and � � � � � � � � 1�� � � � � � 1� � �� ������� �� � � � � � ��
� + � � � � ���� � ' (28)
Let us set � � ���� �
� � � � � � � � � � 1�� � � � � � 1 . Since we assumed the finiteness of���� ��� � � � � � � � � 1�� � � � , we have � � � .
If � � � , then there exists (an arbitrarily large)� � such that � � � � � � � � 1�� � � � � � 1 ,
hence on � ��� ��! the energy� �� ����� is finite and unifomly bounded by
� � � � � +� � � � � 1�� � � � � � . By (26),� �1 ����� is also uniformly bounded and following the proof
of the previous theorem we get the existence of a solution � � � ������� � � 1 of (19) onthe interval � ��� ��! .
The fact that we get uniform bounds on� �� ����� on � ��� ��! for arbitrarily large
values of�
yields the strong convergence in � ����� of � � 1 � �� � �� � ���� 1 and � � �� �� �� � ���� 119

to respectively � � 1 � �� � � � ���� 1 and � � �� �� � � ���� 1 as � � � , for any�
, (uniformly on� ��� ��! ), as well as the uniform convergence of � to � � � � ���� 1 � � � � �� � � , whichis thus continuous.
In addition, we get that for every� � ,
����� � � � �� ����� � ��
��� 1 � �� 0 �� � ����� � ������ � � � � ����� 2 � � � 'We denote this energy by
� � ����� . It is a continuous function of time, and all theinequalities proven so far for the energies
� �� are also valid for� � .
Now, we let � � be the maximal time (possibly infinite) such that for any� � � � , the solution exists and the energies� � are finite and continuous in time,
satisfying (23). We have seen that � � � and wish to show that � � � � � .If we fix � � � � and let ��� � � � ����� +�� " � � 1 ����� we get from (23) that for every� �-� ��� � ! , � � ����� ������ � � � � �)� ����� � � � '
Letting for every�
� � � � ����� 1 � �� 0 �� � � �(� � � ��� � � � � 2 � 1 � � � � �.�
we get � � � � ��
��
� ( 1 * �� ���� �� 0 � � 2��� �
and this yields ���� ����� � � � � � � � � 1�� � � � � �
� � ����� � � � � � � � 1�� � � � . We deduce that���� �
� � � � � � � � � � � 1�� � � � � � 1 � .Now, we can repeat the previous construction, starting from time � and initial
values � � � � � �.� �� � � �(��� ���� 1 , and build a solution of the problem on � � � �-� � � . Thisshows that � � � � � � � , thus � � � � � . Hence Theorem 2 is proven.
6 Rigorous justification for the multimode case
We consider again the problem in (19)–(20). This time, we assume that we havea finite number of modes � � . It was proven in Section 5.1 (simply using theCauchy–Lipschitz Theorem) that this problem has a solution for � � , moreoverwe have seen in Section 4.1 that if
� � �����$������ 1 ��
�� ����� � ��� � � � �� ����� � �
20

then � � is decreasing, so that we have a global control of the energy. We wouldlike to show that � �� � � �
��� � � + � � �����$��� .Consider now an increasing sequence ��� � � � � 1 , with � � � � � as
� � � � ,and such that for each � � � � ' ' ' ��� , � � � ��� � �.� �� � ��� � ��� converge to some pair ofreal numbers ��� +� ���
1� � .
We introduce for every�
the functions � �� ������� � � ��� � � ��� , � � � � ' ' ' ��� ,defined for � � . We have for every � � and
�� � ��-� ��� � � ��� � � � + ���� � � ����� � � 1 � &��� � � �����
and since � � ��� � � ��� goes uniformly to the constant � �� as� ��� we deduce that+�� � � � �-�4��� � � ��� � � , at least in
� 1 � ��� � ��� , so that ���� � � ��� goes to � (a prioriweakly- � in
� � , but in fact the results that follow will yield uniform convergenceon compacts subsets of � ��� � ��� ).
Then it is easy to show that as� � � , the functions � �� and �� �� converge respec-
tively to functions � � and �� � ����� uniformly on the compact intervals in � ��� � ��� ,with � � solving
� � � � � � � � ����� (29)
on � ��� � ��� , and � � � �)� ��� +� , �� � � �)� ��� 1� , for every � � � � � � ����� . We also getthat � ���� 1 � ��� �� ����� �� �� ����� converges (uniformly on compact sets) to � ���� 1 � � � � ����� �� � ����� ,and simultaneously to
� � 1 � ���$��� .Hence, letting � � � � � � � � ���� 1 � � � � ����� and
� � � � � � � � ���� 1 � � �� � ����� ,we deduce that � � � �-� � � , so that � and
�remain constant (since � � �
is aconstant).
But the solution of (29) is explicit; i.e., there exist real numbers � � � � � � ����� 1
such that for every � , � � ����� � � ������ � � � � � ��� � � � ��� � � � � � � ��� . We get
� � � � ����� 1 � � � � � � ��
� � � ����� 1 � � ( � � + � �� ����� � � � � � � ��� � � � � � ����� � � � � � � ��� * '
This expression is constant if and only if � � � � � �/� for every � , provided� � �� � ��� when � �� � � (so that the� � functions � �� ����� � � � � � � ��� and � ������� � � � � � � ��� , �!� � � ' ' ' ��� are linearly independent). Hence we have established
that � � ����� � � as � � � . This result, together with the bound in (18) proves thatfor the case of finite number of modes with Lipschitz control
� � � � , vibration fromany initial condition is damped.
21

Remark If � � � � ��� for some � �� � � , the control law does not damp. A trivialcounter-example is � � �
, with � 1 � � � � . A solution is � 1 � ����� � ��� ,� � ����� � ��� , resulting in � � � � constant.
7 Discussion
We have studied a control for the wave equation where the control is a time depen-dent coefficient. A simple control law based on integrations-by-parts is proposed.We show that under the assumption that the vibration consists of only a finite num-ber of modes of distinct eigenfrequencies, the control law leads to damping. In thecase of one mode, the control law turns out to be optimal.
While we were able to establish wellposedness of the initial value problem forinfinite number of modes, we were unable to prove damping for the system forthis case. The crux of the difficulty is that we were not able to demonstrate thatthe energies corresponding to � � ����� satifying (29) and the limits of the energies of� � ����� coincide.
Finally we remark that an interesting generalization of this problem is to con-sider coefficients which depend on � and � ; i.e., controllable function &��� ����� (see[5] where a specific form of &��� ����� is proposed). A control law similar to the oneproposed in this work can be derived. Analysis of this problem would require ba-sic theory for wave equations with time and space dependent coefficients, whichunfortunately is not well-developed. However, we have performed several 1-D nu-merical experiments that convinced us that such a control procedure should lead todamping.
Acknowledgment
This paper was started during the first author’s visit to the Institute for Mathematicsand its Applications (IMA) in Minneapolis, MN, in September 2000. This visit,and a subsequent visit in April 2001, were funded in part by the IMA. Both authorsexpress their gratitude to the IMA for making this work possible. We are alsopleased to acknowledge useful conversations on this work with Jean-Pierre Pueland Stanley Osher. The first author is supported by CNRS. The work of the secondauthor is supported in part by the National Science Foundation.
22

References
[1] P. D’Ancona and S. Spagnolo, Global solvability for the degenerate Kirchhoffequation with real analytic data, Invent. Math., 108 (1992), pp. 247–262.
[2] P. Destuynder and A. Saidi, Smart materials and flexible structures, ControlCybernet., 26 (1997), pp. 161–205.
[3] G. Haritos and A. Srinivasan, eds., Smart Structures and Materials, ASME,AD-Vol. 24, ASME, New York, 1991.
[4] H. Janocha, ed., Adaptronics and Smart Structures, Springer, New York,1999.
[5] K. Lurie, Control in the coefficients of linear hyperbolic equations via spatio-temporal components, in Homogenization, pp. 285–315, Ser. Adv. Math.Appl. Sci., 50, World Science Publishing, River Ridge, NJ, 1999.
[6] S. Pohozaev, On a class of quasilinear hyperbolic equations, Math. USSRSbornik,25 (1975), pp. 145–158.
[7] J. Restorff, Magnetostrictive materials and devices, in Encyclopedia of Ap-plied Physics, Vol. 9, VCH Publishers, 1994.
23