
CONTROL OF MULTIVARIABLE PROCESSES · Step change to reflux with constant reboiler ... CONTROL OF...
71
CONTROL OF MULTIVARIABLE PROCESSES Process plants ( or complex experiments) have many variables that must be controlled. The engineer must 1. Provide the needed sensors 2. Provide adequate manipulated variables 3. Decide how the CVs and MVs are paired (linked via the control design) Fortunately, most of what we learned about single-loop systems applies, but we need to learn more ! v1 Hot Oil v2 v3 L1 v7 v5 v6 Hot Oil F1 T1 T3 T2 F2 T4 T5 F3 T6 T8 F4 L1 v8 T7 P1 F5 F6 T9
Transcript of CONTROL OF MULTIVARIABLE PROCESSES · Step change to reflux with constant reboiler ... CONTROL OF...

CONTROL OF MULTIVARIABLE PROCESSES
Process plants ( or complex experiments) have many variables that must be controlled. The engineer must
1. Provide the needed sensors2. Provide adequate manipulated variables3. Decide how the CVs and MVs are paired
(linked via the control design)
Fortunately, most of what we learned about single-loop systems applies, but we need to learn more!
v1
Hot Oil
v2
v3
L1
v7
v5 v6
Hot Oil
F1 T1 T3
T2
F2
T4T5
F3 T6
T8
F4
L1
v8
T7
P1F5
F6T9

CONTROL OF MULTIVARIABLE PROCESSES
Two control approaches are possible
L
F
T
A
Multiloop: Many independent PID controllers
Centralized: Method covered in Chapter 23
L
FT
A
Centralized
Controller

CONTROL OF MULTIVARIABLE PROCESSES
Two control approaches are possible
We will concentrate on MULTILOOP
A
Multiloop: Many independent PID controllers
IdtCVdTdttE
TtEKtMV
tCVtSPtEt
dI
c +
−+=
−=
∫0
')'(1)()(
)()()(IdtCVdTdttE
TtEKtMV
tCVtSPtEt
dI
c +
−+=
−=
∫0
')'(1)()(
)()()(
IdtCVdTdttE
TtEKtMV
tCVtSPtEt
dI
c +
−+=
−=
∫0
')'(1)()(
)()()(
FC
LCTC
v1
v3
v2
CONTROL OF MULTIVARIABLE PROCESSES
v1
Hot Oil
v2
v3
L1
v7
v5 v6
Hot Oil
F1 T1 T3
T2
F2
T4T5
F3 T6
T8
F4
L1
v8
T7
P1F5
F6T9
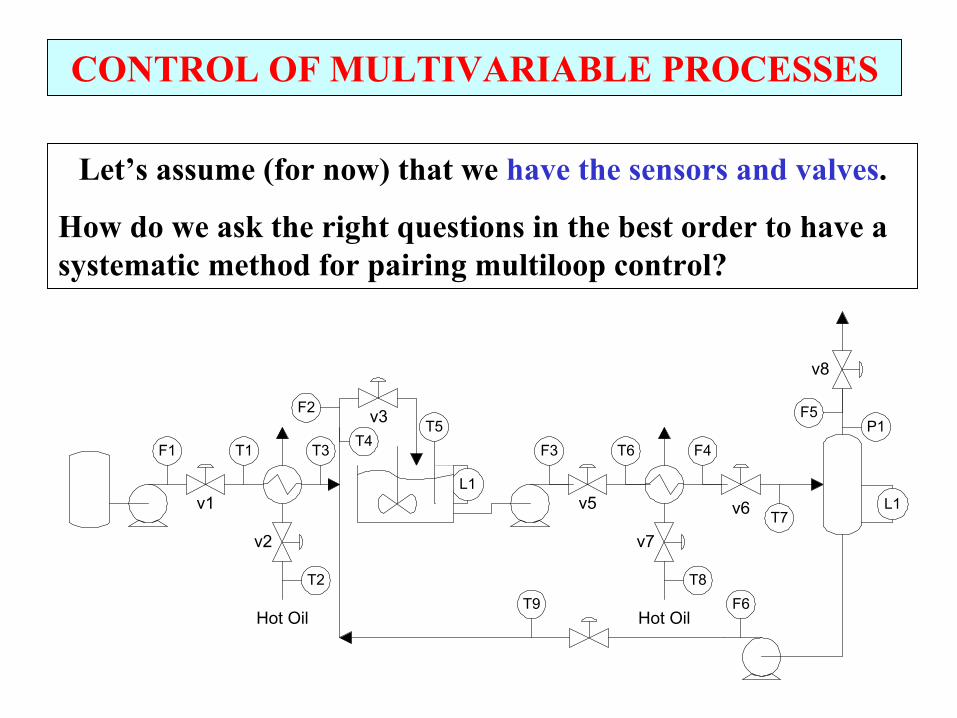
Let’s assume (for now) that we have the sensors and valves.
How do we ask the right questions in the best order to have a systematic method for pairing multiloop control?

CONTROL OF MULTIVARIABLE PROCESSES
Some key questions whose answers help us design a multiloop control system.
1. IS INTERACTION PRESENT?- If no interaction ⇒ All single-loop problems
2. IS CONTROL POSSIBLE?- Can we control the specified CVs with the
available MVs?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?- Over what range can control keep CVs near the set points?
Let’s starthere to build
understanding

CONTROL OF MULTIVARIABLE PROCESSES
T
A
What is different when we have multiple MVs and CVs?
INTERACTION!!
Definition: A multivariable process has interaction when input (manipulated) variables affect more than one output (controlled) variable.
Does this process have interaction?

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
One way - Fundamental modelling
FA, xA
FS, xAS = 0FM, xAM
AMMASSAA
MSA
xFxFxFFFF
=+
=+'S
ssAs
A'A
ssAs
SAM
SAM
F)FF(
FF)FF(
F'x
'F'F'F
+
−+
+=
+=
22
Fundamental (n-l) Fundamental linearized
v1
v2

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
One way - Fundamental modelling
time
v1, %
ope
n
FA, xA
FS, xAS = 0FM, xAM
v1
v2
time
v2, %
ope
ntime
Tota
l flo
w, F
M
timeC
once
nt,
xA
M
Sketch the responses of
the dependent variables

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
One way - Fundamental modelling
time
v1, %
ope
n
FA, xA
FS, xAS = 0FM, xAM
v1
v2
time
v2, %
ope
ntime
Tota
l flo
w, F
M
timeC
once
n.,
x AM
Sketch the responses of
the dependent variables

CONTROL OF MULTIVARIABLE PROCESSES
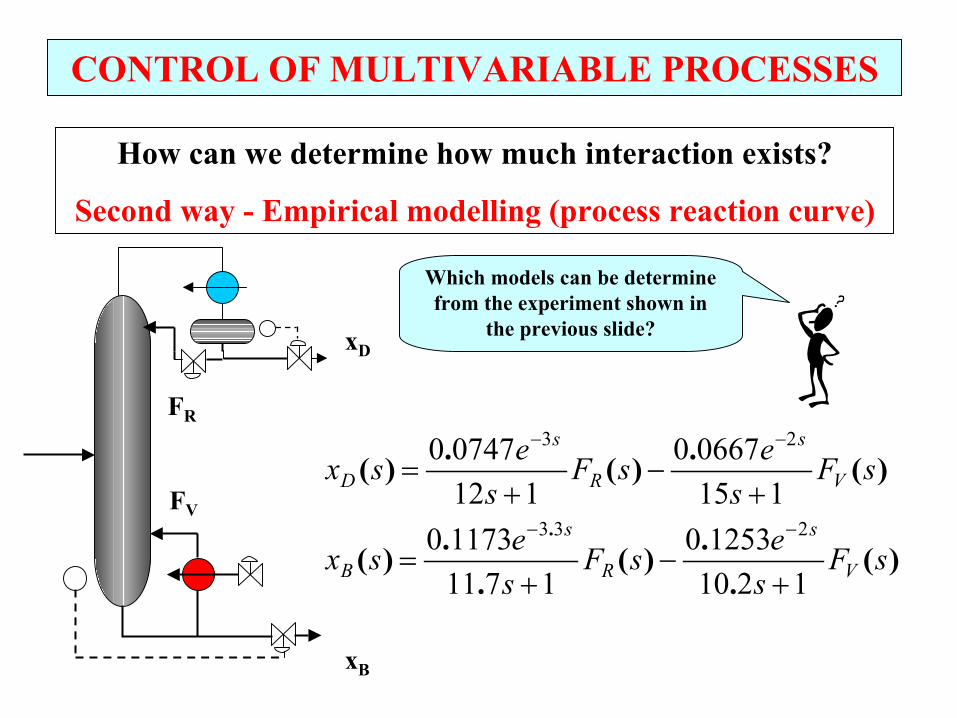
How can we determine how much interaction exists?
Second way - Empirical modelling (process reaction curve)
0 20 40 60 80 100 1200.98
0.982
0.984
0.986
0.988
0.99
Time (min)
XD
(mol
frac)
0 20 40 60 80 100 1200.02
0.025
0.03
0.035
0.04
Time (min)
XB
(mol
frac)
0 20 40 60 80 100 1201.12
1.125
1.13
1.135x 10
4
Time (min)
R (m
ol/m
in)
0 20 40 60 80 100 1201.5613
1.5613
1.5614
1.5614
1.5615
1.5615x 10
4
Time (min)
V (m
ol/m
in)
Step change to reflux with constant reboiler
Sketch the responses of the dependent variables
xD
xB
V
R

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
Second way - Empirical modelling (process reaction curve)
0 20 40 60 80 100 1200.98
0.982
0.984
0.986
0.988
0.99
Time (min)
XD
(mol
frac)
0 20 40 60 80 100 1200.02
0.025
0.03
0.035
0.04
Time (min)
XB
(mol
frac)
0 20 40 60 80 100 1201.12
1.125
1.13
1.135x 10
4
Time (min)
R (m
ol/m
in)
0 20 40 60 80 100 1201.5613
1.5613
1.5614
1.5614
1.5615
1.5615x 10
4
Time (min)
V (m
ol/m
in)
Step change to reflux with constant reboiler
xD
xB
V
R
CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
Second way - Empirical modelling (process reaction curve)
)(.
.)(.
.)(
)(.)(.)(
.
sFsesF
sesx
sFsesF
sesx
V
s
R
s
B
V
s
R
s
D
121012530
171111730
11506670
11207470
233
23
+−
+=
+−
+=
−−
−−FR
FV
xB
xD
Which models can be determine from the experiment shown in
the previous slide?

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
Use the model; if model can be arranged so that it has a “diagonal” form, no interaction exists.
=
3
2
1
22
111
000000
MVMVMV
KK
K
CV
CV
nnn
...
If any off-diagonal are non-zero, interaction exists.

CONTROL OF MULTIVARIABLE PROCESSES
How can we determine how much interaction exists?
Let’s use qualitative understanding to answer the question.
T
A
Does this CSTR reactor process haveinteraction?v1
v2
Feed has CA0
cooling
Information:
1. Exothermic reaction
2. -rA = k0 e-E/RT CA
LC
CONTROL OF MULTIVARIABLE PROCESSES
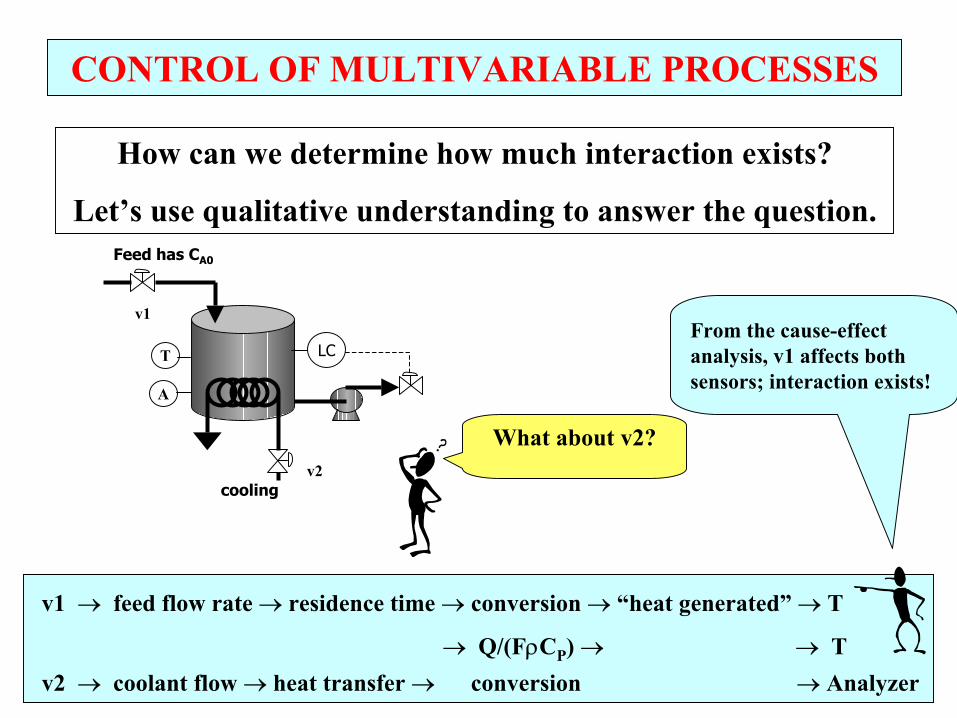
How can we determine how much interaction exists?
Let’s use qualitative understanding to answer the question.
T
A
v1
v2
Feed has CA0
cooling
LC
v1 → feed flow rate → residence time → conversion → “heat generated” → T
→ Q/(FρCP) → → Tv2 → coolant flow → heat transfer → conversion → Analyzer
From the cause-effect analysis, v1 affects both sensors; interaction exists!
What about v2?

+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)D(s)
CV1(s)
CV2(s)MV2(s)
MV1(s)
CONTROL OF MULTIVARIABLE PROCESSES
We will use a block diagram to represent the dynamics of a 2x2 process, which involves multivariable control.
The blocks (G) cannot be found in the process. They are the models that represent the behavior between one input and one output.

FD
XD
FRB
FB
XB
FXF
q
FR
FV
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)XF(s)
XD(s)
XB(s)FRB(s)
FR(s)
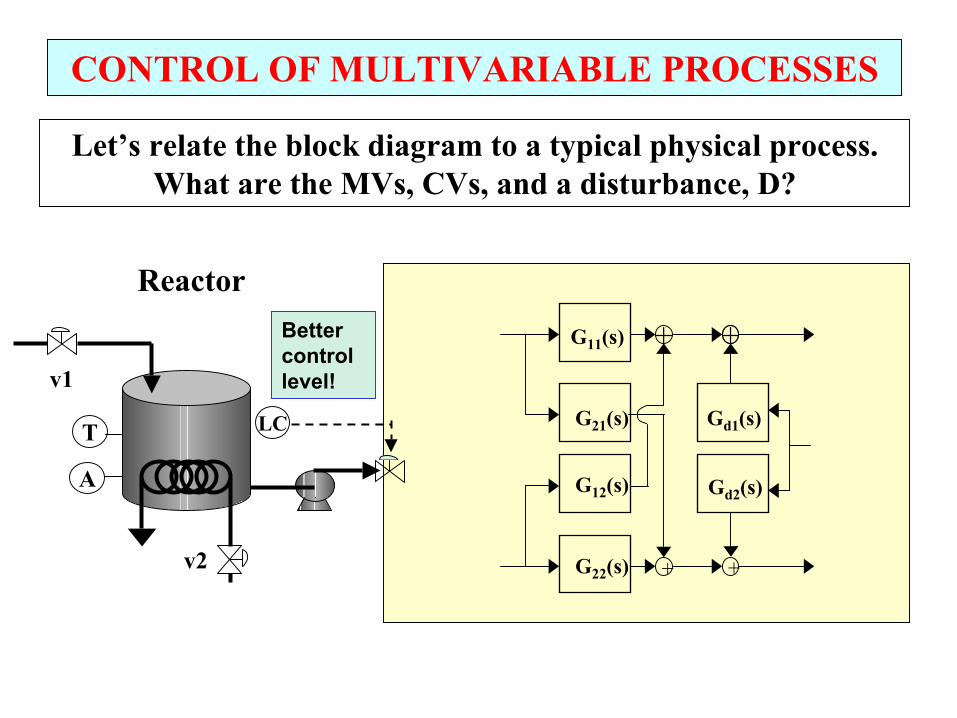
Let’s relate the block diagram to a typical physical process. What are the MVs, CVs, and a disturbance, D?
CONTROL OF MULTIVARIABLE PROCESSES
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
Let’s relate the block diagram to a typical physical process. What are the MVs, CVs, and a disturbance, D?
T
A
Reactor
CONTROL OF MULTIVARIABLE PROCESSES
v1
v2
LC
Better control level!

+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
Let’s relate the block diagram to a typical physical process. What are the MVs, CVs, and a disturbance, D?
T
A
Reactor
CONTROL OF MULTIVARIABLE PROCESSES
v1
v2
v1
v2
A
T
Disturbances = feed composition, feed temperature, coolant temperature, …
LC
Better control level!

CONTROL OF MULTIVARIABLE PROCESSES
Some key questions whose answers help us design a multiloop control system.
1. IS INTERACTION PRESENT?- If no interaction ⇒ All single-loop problems
2. IS CONTROL POSSIBLE?- How many degrees of freedom exist?- Can we control CVs with MVs?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?- Over what range can control keep CVs near the set points?
Let’s learn how to answer thiskey question

CONTROL OF MULTIVARIABLE PROCESSES
DEGREES OF FREEDOM
How do we determine the maximum # variables that be controlled in a process?
v1
Hot Oil
v2
v3
L1
v7
v5 v6
Hot Oil
F1 T1 T3
T2
F2
T4T5
F3 T6
T8
F4
L1
v8
T7
P1F5
F6T9

CONTROL OF MULTIVARIABLE PROCESSES
DEGREES OF FREEDOM
A requirement for a successful design is:The number of valves ≥ number of CV to be controlled
v1
Hot Oil
v2
v3
L1
v7
v5 v6
Hot Oil
F1 T1 T3
T2
F2
T4T5
F3 T6
T8
F4
L1
v8
T7
P1F5
F6T9
OK, but this does not ensure that we cancontrol the CVs that we want to control!
CONTROL OF MULTIVARIABLE PROCESSES
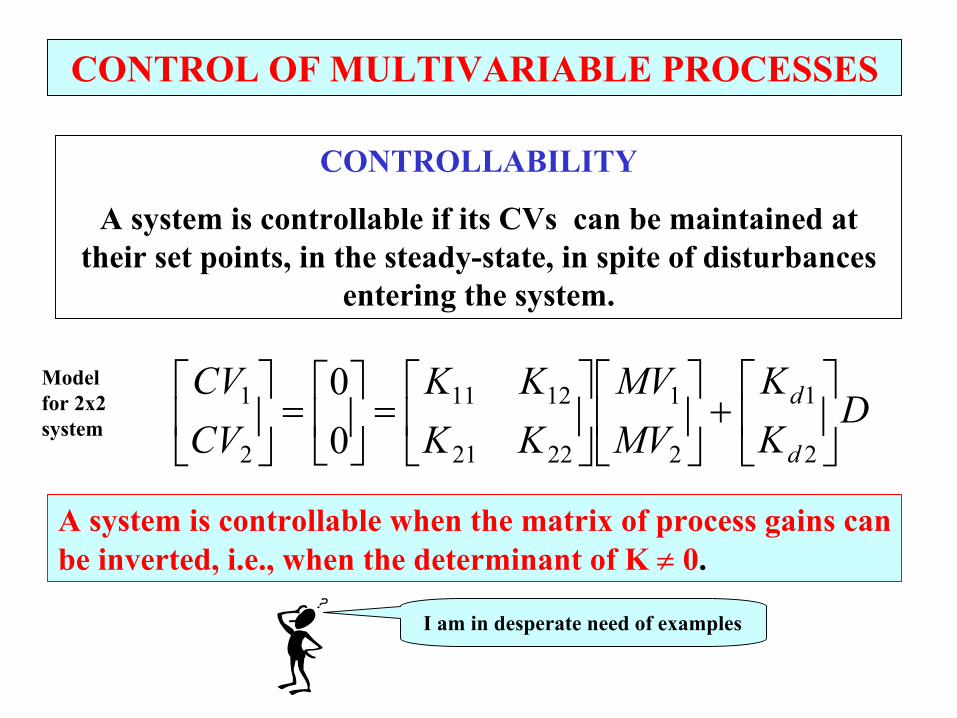
CONTROLLABILITY
A system is controllable if its CVs can be maintained at their set points, in the steady-state, in spite of disturbances
entering the system.
A system is controllable when the matrix of process gains can be inverted, i.e., when the determinant of K ≠ 0.
DKK
MVMV
KKKK
CVCV
d
d
+
=
=
2
1
2
1
2221
1211
2
1
00Model
for 2x2 system
I am in desperate need of examples

CONTROL OF MULTIVARIABLE PROCESSES
For the autos in the figure
• Are they independently controllable?
• Does interaction exist?
Let’s do the toyautos first; then,
do some processes
CONTROL OF MULTIVARIABLE PROCESSES
For the autos in the figure
• Are they independently controllable?
• Does interaction exist?
Connected by spring

CONTROL OF MULTIVARIABLE PROCESSES
For the autos in the figure
• Are they independently controllable?
• Does interaction exist?
Connected by beam

CONTROL OF MULTIVARIABLE PROCESSES
FA, xA
FS, xAS = 0FM, xAM
For process Example #1: the blending process
• Are the CVs independently controllable?
• Does interaction exist?
'S
ssAs
A'A
ssAs
SAM
SAM
F)FF(
FF)FF(
F'x
'F'F'F
+
−+
+=
+=
22

CONTROL OF MULTIVARIABLE PROCESSES
FA, xA
FS, xAS = 0FM, xAM
For process Example #1: the blending process
• Are the CVs independently controllable?
• Does interaction exist?
'S
ssAs
A'A
ssAs
SAM
SAM
F)FF(
FF)FF(
F'x
'F'F'F
+
−+
+=
+=
22
02
2
2
2≠
+−
+
−=
)FF(F
)FF(F)K(Det
SA
S
SA
A
Yes, this system is controllable!
CONTROL OF MULTIVARIABLE PROCESSES
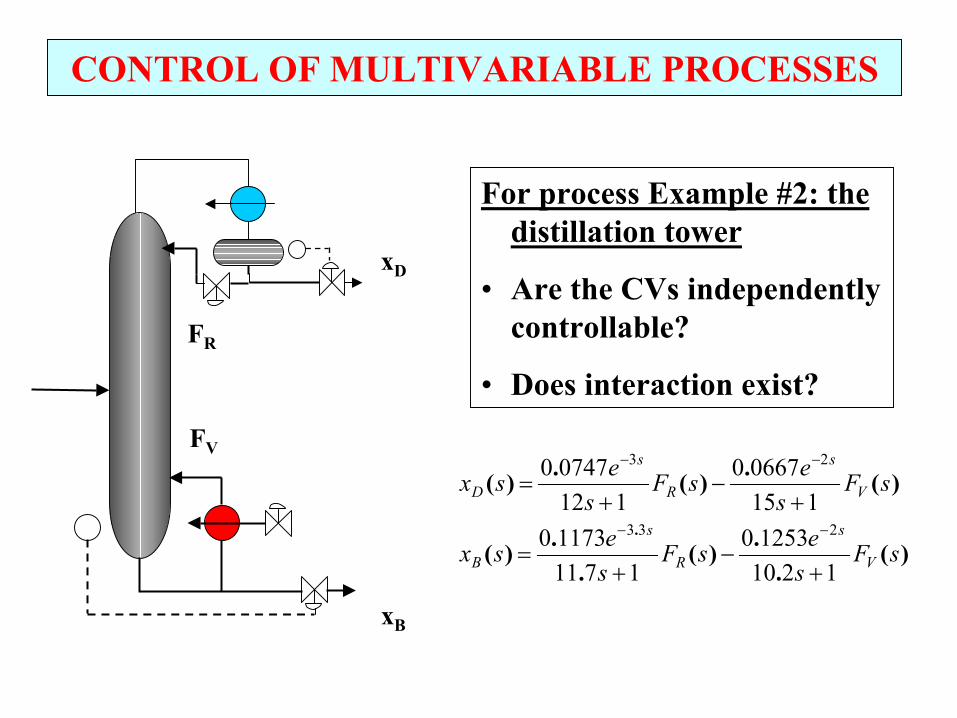
For process Example #2: the distillation tower
• Are the CVs independently controllable?
• Does interaction exist?
FR
FV
xB
xD
)(.
.)(.
.)(
)(.)(.)(
.
sFsesF
sesx
sFsesF
sesx
V
s
R
s
B
V
s
R
s
D
121012530
171111730
11506670
11207470
233
23
+−
+=
+−
+=
−−
−−

CONTROL OF MULTIVARIABLE PROCESSES
For process Example #2: the distillation tower
FR
FV
xB
xD
)(.
.)(.
.)(
)(.)(.)(
.
sFsesF
sesx
sFsesF
sesx
V
s
R
s
B
V
s
R
s
D
121012530
171111730
11506670
11207470
233
23
+−
+=
+−
+=
−−
−−
Det (K) = 1.54 x 10-3 ≠ 0
Small but not zero (each gain is small)
The system is controllable!

CONTROL OF MULTIVARIABLE PROCESSES
For process Example #3: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
A → B-rA = k0 e -E/RT CA
T
ACB
v1
v2

CONTROL OF MULTIVARIABLE PROCESSES
For process Example #3: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
T
ACB
A → B-rA = k0 e -E/RT CA
v1
v2
The interaction can be strong
In general, the temperature and conversion (extent of reaction) can be influenced.
The system is controllable.
(See Appendix 3 for examples)

CONTROL OF MULTIVARIABLE PROCESSES
For process Example #4: the mixing tank
• Are the CVs independently controllable?
• Does interaction exist?
T
ACA
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)v1
v2

CONTROL OF MULTIVARIABLE PROCESSES
For process Example #4: the mixing tank
• Are the CVs independently controllable?
• Does interaction exist?
T
ACA
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)v1
v2 0
0
Nothing affects composition at S-S; the system is NOT controllable.

CONTROL OF MULTIVARIABLE PROCESSESFor process Example #5: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
A → B-rA = k0 e -E/RT CA
T
ACB
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)v1 v2

CONTROL OF MULTIVARIABLE PROCESSESFor process Example #5: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
A → B-rA = k0 e -E/RT CA
T
ACB
v1 v2
Solution continued on
next slide
=
=
2
1
2121
1111
00
MVMV
KKKK
TCB
µµ
Both valves have the same effects on both variables; the only difference is the magnitude of the flow change (µ = constant).
Det (K) = 0; not controllable!

For process Example #5: the non-isothermal CSTR
In this case, both MVs affect ONE common variable, and this common variable affects both CVs. We can change both CVs, but we cannot move the CVs to independentvalues!
+ +
+ +
G11(s)
G22(s)
Gd2(s)
Gd1(s)D(s)
CV1(s)
CV2(s)MV2(s)
MV1(s)
G(s)
G(s)
“InputContraction”
Solution continued on
next slide

SP2(s)
+-
++
+ +-+
Gc1(s)
Gc2(s)
G11(s)
G22(s)
Gd2(s)
Gd1(s)
D(s)
CV1(s)
CV2(s)MV2(s)
MV1(s)SP1(s)
Does not
work!!
For process Example #5: the non-isothermal CSTR
For input contraction, multivariable feedback control is not possible; the system is not controllable! We can change both CVs, but we cannot move the CVs to independent values!
Solutioncomplete

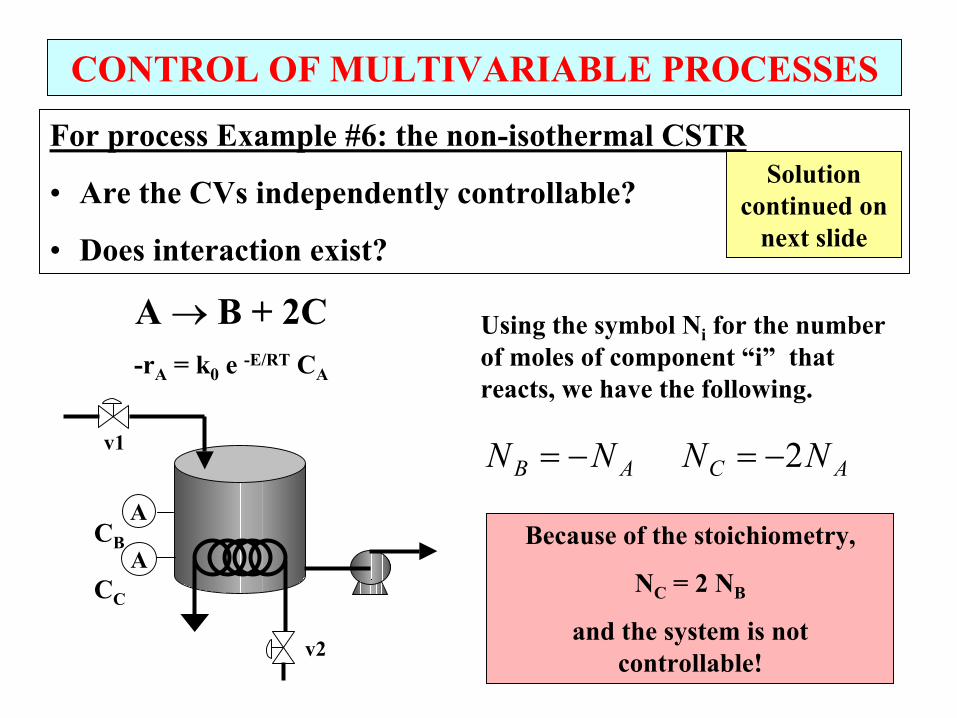
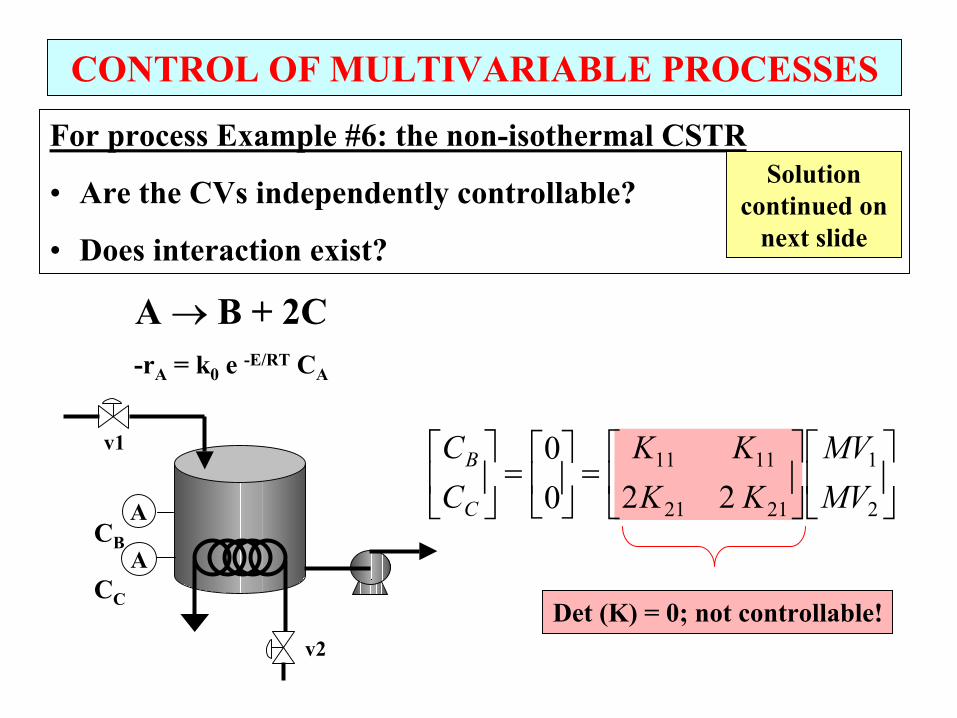
For process Example #6: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
A → B + 2C-rA = k0 e -E/RT CA
A
ACB
CC
CONTROL OF MULTIVARIABLE PROCESSES
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)v1
v2
For process Example #6: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
A → B + 2C-rA = k0 e -E/RT CA
A
ACB
CC
CONTROL OF MULTIVARIABLE PROCESSES
v1
v2
Using the symbol Ni for the number of moles of component “i” that reacts, we have the following.
ACAB NNNN 2−=−=
Because of the stoichiometry,
NC = 2 NB
and the system is not controllable!
Solution continued on
next slide
For process Example #6: the non-isothermal CSTR
• Are the CVs independently controllable?
• Does interaction exist?
A → B + 2C-rA = k0 e -E/RT CA
A
ACB
CC
CONTROL OF MULTIVARIABLE PROCESSES
v1
v2
Solution continued on
next slide
=
=
2
1
2121
1111
2200
MVMV
KKKK
CC
C
B
Det (K) = 0; not controllable!

For output contraction, both MVs affect both CVs, but the CVs are related through the physics and chemistry. We can change both CVS, but we cannot move the CVs to independent values!
+
+
G11(s)
G22(s)
Gd2(s)
Gd1(s)D(s)
CV1(s)
CV2(s)MV2(s)
MV1(s)
G12(s)
+
G(s)
“output contraction”
Solution continued on
next slide

+-
++
+ +-
+
Gc1(s)
Gc2(s)
G11(s)
G12(s) Gd2(s)
Gd1(s)
D(s)
CV1(s)
CV2(s)
MV2(s)
MV1(s)
SP1(s)
SP2(s)
Does not
work!!
In this case, multivariable feedback control is not possible; the system is uncontrollable!
Solutioncomplete

CONTROL OF MULTIVARIABLE PROCESSES
CONTROLLABILITY
Conclusions about determining controllability
1. One CV cannot be affected by any valve
3. Lack of independent effects.Look for “contractions”
This is generallyeasy to determine.
This requires care andprocess insight or modelling to
determine.
Lack of controllability when

CONTROL OF MULTIVARIABLE PROCESSES
Some key questions whose answers help us design a multiloop control system.
1. IS INTERACTION PRESENT?- If no interaction ⇒ All single-loop problems
2. IS CONTROL POSSIBLE?- How many degrees of freedom exist?- Can we control CVs with MVs?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?- Over what range can control keep CVs near the set points?
Let’s see howgood the
performancecan be

CONTROL OF MULTIVARIABLE PROCESSES
How does interaction affect the steady-state behavior of the blending process?
FA, xA
FS, xAS = 0 FM, xAM
0
10
20
30
40
50
60
70
80
90
100
0.00 0.10 0.20 0.33 0.40 0.50 0.60 0.70 0.80 0.90 1.00
xAM, Composition (fraction A)
Tota
l flo
w, F
3
Please sketch the achievable
values
FA maximum = 30
Fs maximum = 60

CONTROL OF MULTIVARIABLE PROCESSES
How does interaction affect the steady-state behavior of the blending process?
FA, xA
FS, xAS = 0 FM, xAM
0
10
20
30
40
50
60
70
80
90
100
0.00 0.10 0.20 0.33 0.40 0.50 0.60 0.70 0.80 0.90 1.00
Composition (fraction A)
Tota
l flo
w, F
3
infeasible
feasible
Please explainthis shape
Note:
This shows a range of set points that can be achieved (without disturbances).
FA maximum = 30
Fs maximum = 60

CONTROL OF MULTIVARIABLE PROCESSES
STEADY-STATE OPERATING WINDOW
Conclusions about the steady-state behavior of a multivariable process
1. Shape of the Window
2. What influences the size of the Window?
3. How does Window relate to Controllability?
Summarize your conclusions here.
The operating window is not generally a simple shape, like a rectangle.
The operating window is influenced by process chemistry, equipment capacity, disturbances …
Process cannot be “moved” (controlled) outside of the window. If operating window is empty, the system is not controllable.

CONTROL OF MULTIVARIABLE PROCESSES
1. How many experiments are needed to tune controllers?
2. Which controller should be implemented first?
+ +
+ +
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)D(s)
CV1(s)
CV2(s)MV2(s)
MV1(s))()(
1
1
sMVsCV
)()(
2
2
sMVsCV
To tune each controller, we need
NOW, LET’S LOOK AT THE DYNAMIC BEHAVIOR
CONTROL OF MULTIVARIABLE PROCESSES
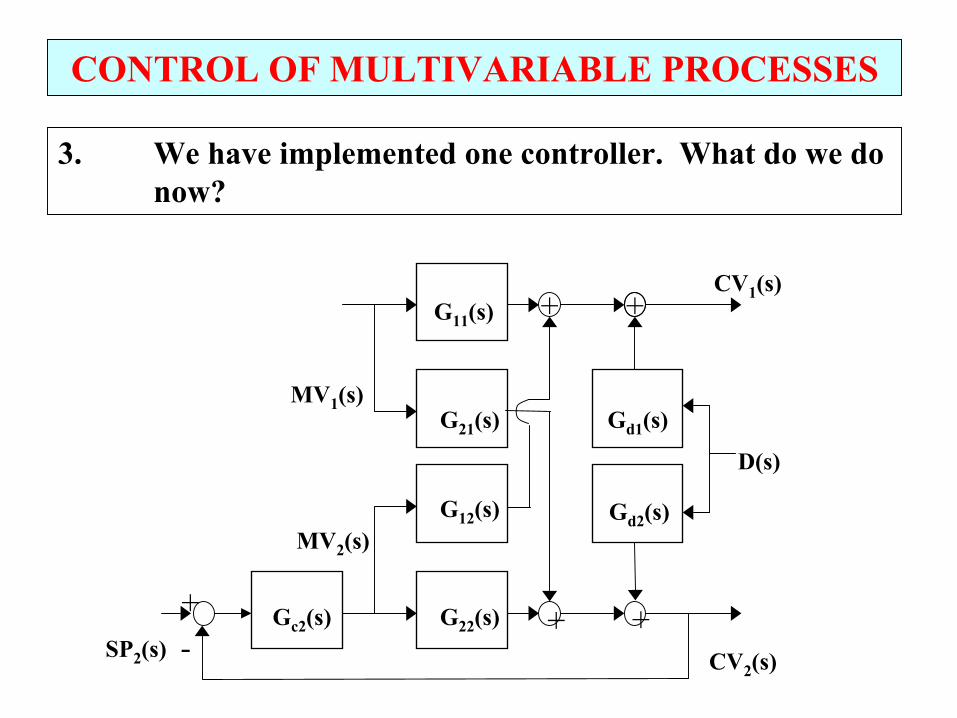
3. We have implemented one controller. What do we do now?
+ +
+ +-+ Gc2(s)
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
D(s)
CV1(s)
CV2(s)
MV2(s)
MV1(s)
SP2(s)

CONTROL OF MULTIVARIABLE PROCESSES
4. What if we perform another experiment to learn the dynamics between MV1 and CV1, with controller #2 in automatic?
Is the dynamic behavior different from without second controller (GC2)? What elements does the behavior depend upon?
+ +G11(s)
G21(s)
G12(s) Gd2(s)
Gd1(s)
D(s)
CV1(s)
MV1(s)

CONTROL OF MULTIVARIABLE PROCESSES
4. Is the dynamic behavior different from without second controller (GC2)? What elements does the behavior depend upon?
)s(G)s(G)s(G)s(G)s(G
)s(G)s(MV)s(CV
c
c
222
2211211
1
1
1+−=
The process “seen” by the controller
changes!
+
+ +-+ Gc2(s)
G11(s)
G21(s)
G12(s)
G22(s)
CV1(s)
CV2(s)
MV2(s)
MV1(s)
SP2(s)
“direct path”
“interaction path”

CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
+-+
+
+ +-
+
Gc1(s)
Gc2(s)
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
D(s)
CV1(s)
CV2(s)
MV2(s)
MV1(s)
SP1(s)
SP2(s)
• Tuning that is stable for each loop might not be stable when both are in operation!
• We need to tune loops iteratively, until we obtain good performance for all loops!
I think that I need an example again!

CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
Let’s look at a simple example with interaction,
++
++=
−−
−−
)s(MV)s(MV
se.
se.
se.
se.
)s(CV)s(CV
s.s.
s.s.
2
10101
0101
2
1
2101
21750
21750
2101
We will pair the loops on the “strongest” gains,
MV1(s) ⇒ CV1(s) and MV 2(s) ⇒ CV2(s)

Results with only one controller in automatic (KC1 = 2.0, TI1 = 3)
This system is stable and perhaps a bit too aggressive.
0 20 40 60 80 1000
0.5
1
1.5IAE = 2.5003 ISE = 1.5448
CV
1
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1IAE = 66.45 ISE = 49.8627
CV
2
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5
3SAM = 7.1543 SSM = 87.4545
Time
MV
1
0 20 40 60 80 100 120-1
-0.5
0
0.5
1SAM = 0 SSM = 0
Time
MV
2
Feedback control for SP change
Why did this change?

Results with both controllers in automatic (Kc = 2.0, TI = 3)
This system is unstable!! Each was stable by itself!!
0 20 40 60 80 100-15
-10
-5
0
5
10
15IAE = 251.0259 ISE = 1426.773
CV
1
0 20 40 60 80 100-15
-10
-5
0
5
10
15IAE = 250.3684 ISE = 1425.127
CV
2
0 20 40 60 80 100 120-20
-10
0
10
20SAM = 854.3713 SSM = 16670.7031
Time
MV
1
0 20 40 60 80 100 120-20
-10
0
10
20SAM = 852.3648 SSM = 16618.2934
Time
MV
2

CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
)]s(G)s(G)s(G)s(G)[s(G)s(G)s(G)s(G)s(G)s(G)s(numerator
)s(SP)s(CV
cccc 21122211212221111
1
1 −+++=
+-+
+
+ +-
+
Gc1(s)
Gc2(s)
G11(s)
G21(s)
G12(s)
G22(s)
Gd2(s)
Gd1(s)
D(s)
CV1(s)
CV2(s)
MV2(s)
MV1(s)
SP1(s)
SP2(s)
I recall that elementsin the denominator
affect stability.

CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
0
1
2
3
4
Kc2
, LO
OP
2 C
ON
TRO
LLER
GA
IN
0 0.5 1 1.5 2 2.5 3 3.5 Kc1, LOOP 1 CONTROLLER GAIN
Stable for 2x2
Unstable for 2x2
Notes:1. TI = 3 for both
controllers (reasonable = t63%)
2. KC < 3.75 stable for single-loop feedback
3. KC = 2.0 stable for one loop
4. KC = 2.0 unstable for two loops!!
5. These numerical results are for the example only; concepts are general
Single-loop inside the dashed lines would be stable.

CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
0
1
2
3
4
Kc2
, LO
OP
2 C
ON
TRO
LLER
GA
IN
0 0.5 1 1.5 2 2.5 3 3.5 Kc1, LOOP 1 CONTROLLER GAIN
Stable for 2x2
Unstablefor 2x2
We can have any values in the stable region.
How do we choose the “best”.
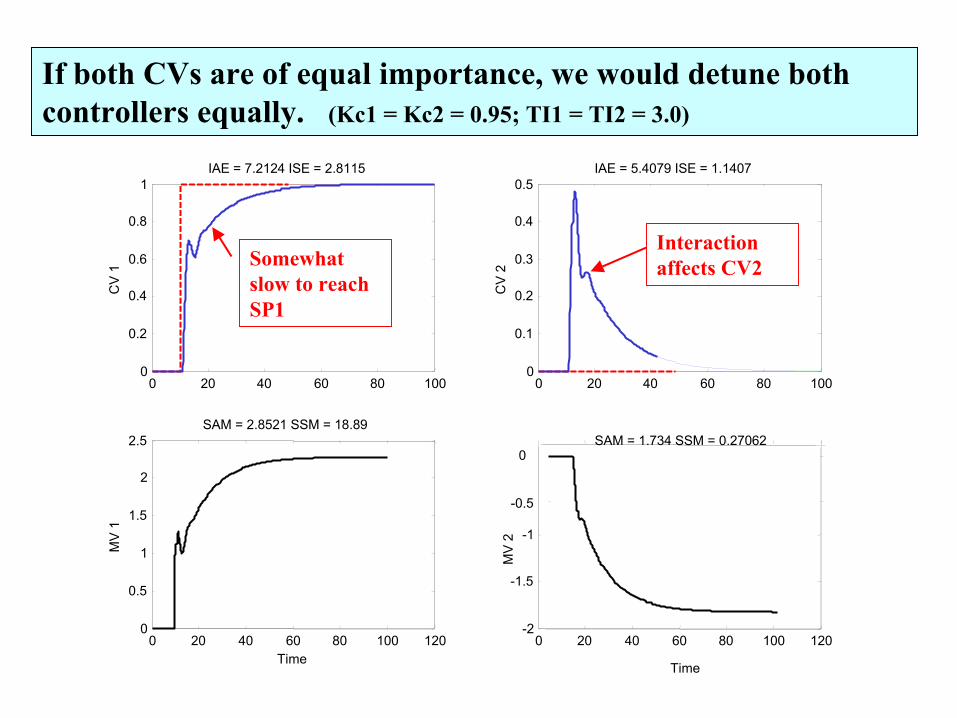
If both CVs are of equal importance, we would detune both controllers equally. (Kc1 = Kc2 = 0.95; TI1 = TI2 = 3.0)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1IAE = 7.2124 ISE = 2.8115
CV
1
0 20 40 60 80 1000
0.1
0.2
0.3
0.4
0.5IAE = 5.4079 ISE = 1.1407
CV
2
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5SAM = 2.8521 SSM = 18.89
Time
MV
1
0 20 40 60 80 100 120-2
-1.5
-1
-0.5
0SAM = 1.734 SSM = 0.27062
Time
MV
2
Somewhat slow to reach SP1
Interaction affects CV2

If CV1 is more important, we would make Gc1 aggressive and detune Gc2 more. (Kc1 = 1.40 and Kc2 = 0.50; TI1 = TI2 = 3.0)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1IAE = 4.8803 ISE = 1.8496
CV
1
0 20 40 60 80 1000
0.2
0.4
0.6
0.8IAE = 10.2283 ISE = 3.1023
CV
2
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5SAM = 4.3516 SSM = 41.4664
Time
MV
1
0 20 40 60 80 100 120-2
-1.5
-1
-0.5
0SAM = 1.7163 SSM = 0.1792
Time
MV
2
Fast tracking of the set point
Increased disturbance from interaction

If CV2 is more important, we would make Gc2 aggressive and detune Gc1 more. (Kc1 = 0.50 and Kc2 = 1.40; TI1 = TI2 = 3.0)
0 20 40 60 80 1000
0.2
0.4
0.6
0.8
1IAE = 13.6475 ISE = 5.9352
CV
1
0 20 40 60 80 1000
0.1
0.2
0.3
0.4IAE = 3.653 ISE = 0.3957
CV
2
0 20 40 60 80 100 1200
0.5
1
1.5
2
2.5SAM = 2.2765 SSM = 5.2708
Time
MV
1
0 20 40 60 80 100 120-2
-1.5
-1
-0.5
0SAM = 1.7163 SSM = 0.1792
Time
MV
2
Very slow to reach the SP1
Reduced disturbance due to interaction
CONTROL OF MULTIVARIABLE PROCESSES
In general, the behavior of one loop depends on the interaction and the tuning of the other loop(s).
Some conclusions for multiloop PID tuning:
1. For multiloop, we generally have to tune the controllers in a less aggressive manner than for single-loop.
2. Textbook gives tuning approach, (Kc)ml ≈ 1/2 (Kc)sl
3. We can tune important loop tightly, if we also detune (make less aggressive) other loops.

CONTROL OF MULTIVARIABLE PROCESSES
Summary of key questions for multiloopcontrol system
1. IS INTERACTION PRESENT?- No interaction ⇒ All single-loop problems
- We use models to determine interaction
Fundamental or empirical
2. IS CONTROL POSSIBLE?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?
CONTROL OF MULTIVARIABLE PROCESSES
Summary of key questions for multiloopcontrol system
1. IS INTERACTION PRESENT?
2. IS CONTROL POSSIBLE?- DOF: The # of valves ≥ # of controlled variables
- Controllable: Independently affect every CV
Check if det [K] ≠ 0
Look for “contractions”
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?
CONTROL OF MULTIVARIABLE PROCESSES
Summary of key questions for multiloopcontrol system
1. IS INTERACTION PRESENT?
2. IS CONTROL POSSIBLE?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?- The operating window is:
strongly affected by interaction
strongly affected by equipment capacities
not a rectangle or symmetric

CONTROL OF MULTIVARIABLE PROCESSES
Summary of key questions for multiloopcontrol system
1. IS INTERACTION PRESENT?
2. IS CONTROL POSSIBLE?
3. WHAT IS S-S AND DYNAMIC BEHAVIOR?- Interaction affects loop stability
- We have to detune to retain stability margin
- We can improve some loops by tight tuning, but we have to detune and degrade other loops

CONTROL OF MULTIVARIABLE PROCESSES
Workshop in Interaction in Multivariable Control Systems

CONTROL OF MULTIVARIABLE PROCESSES
Workshop Problem # 1
You have been asked to evaluate the control design in the figure.
Discuss good and poor aspects and decide whether you would recommend the design.

CONTROL OF MULTIVARIABLE PROCESSES
Workshop Problem # 2
We need to control the mixing tank effluent temperature and concentration.
You have been asked to evaluate the design in the figure.
Discuss good and poor aspects and decide whether you would recommend the design.
F1T1CA1
F2T2CA2
T
A
CONTROL OF MULTIVARIABLE PROCESSES
Workshop Problem # 3
Summarize the underlying principles that can lead to a “contraction” and to a loss of controllability. These principles will be applicable to many process examples, although the specific variables could be different.
Hint: Review the examples in the lecture and identify the root cause for each.


















