Control of human arm movements in two dimensions: Use of the wrist in short pointing movements
40
HUMAN MOVEMENT ELSEVIER Human Movement Science 14 (1995) 165-204 SCIENCE Control of human arm movements in two dimensions: Use of the wrist in short pointing movements Jeffrey Dean *, Michael Briiwer Abteilung fiir Biokybernetik und Theoretische Biologie, Uniuersitiit Bielefeld, Postfach 100 131, D-33501 Bielefeld, Germany Abstract In order to examine how humans utilize redundant degrees of freedom in the arm, movements of the shoulder, elbow and wrist were recorded as subjects made short pointing movements in a horizontal plane. The results show that the wrist is used considerably less than the elbow, even when geometrical relationships would allow either joint to perform the movement. The wrist is used relatively more in short movements (5 to 10 cm), particularly those at right angles to the line of the hand and lower arm, and in fast movements. These changes are not predicted by cost functions which describe static postures. Repetition of movements does not greatly change the amount of wrist movement, but when use of the wrist is explicitly requested, large wrist movements can be incorporated into fast movements with no penalties in duration or peak velocity. For directions where wrist movement is larger and shoulder movement is small, peak velocity is higher and duration is shorter, indicating that subjects do not fully compensate for the anisotropy in the effective inertia of the arm to keep durations and peak velocities constant but instead take advantage of the low inertia at the wrist. 1. Introduction Control of the human arm, like that of any multi-jointed manipulator, is difficult for two reasons. First, the mechanical characteristics of the arm vary with its configuration (Hogan, 1985). Second, the control problem is * Corresponding author. Fax: + 49 521 106-2963; E-mail: jeff@biol28,uni-bielefeld.de. 0167-9457/95/$09.50 0 1995 Elsevier Science B.V. All rights reserved SSDI 0167-9457(95)00009-7
-
Upload
jeffrey-dean -
Category
Documents
-
view
213 -
download
0
Transcript of Control of human arm movements in two dimensions: Use of the wrist in short pointing movements

HUMAN MOVEMENT
ELSEVIER Human Movement Science 14 (1995) 165-204 SCIENCE
Control of human arm movements in two dimensions: Use of the wrist in short pointing movements
Jeffrey Dean * , Michael Briiwer
Abteilung fiir Biokybernetik und Theoretische Biologie, Uniuersitiit Bielefeld, Postfach 100 131, D-33501 Bielefeld, Germany
Abstract
In order to examine how humans utilize redundant degrees of freedom in the arm, movements of the shoulder, elbow and wrist were recorded as subjects made short pointing movements in a horizontal plane. The results show that the wrist is used considerably less than the elbow, even when geometrical relationships would allow either joint to perform the movement. The wrist is used relatively more in short movements (5 to 10 cm), particularly those at right angles to the line of the hand and lower arm, and in fast movements. These changes are not predicted by cost functions which describe static postures. Repetition of movements does not greatly change the amount of wrist movement, but when use of the wrist is explicitly requested, large wrist movements can be incorporated into fast movements with no penalties in duration or peak velocity. For directions where wrist movement is larger and shoulder movement is small, peak velocity is higher and duration is shorter, indicating that subjects do not fully compensate for the anisotropy in the effective inertia of the arm to keep durations and peak velocities constant but instead take advantage of the low inertia at the wrist.
1. Introduction
Control of the human arm, like that of any multi-jointed manipulator, is difficult for two reasons. First, the mechanical characteristics of the arm vary with its configuration (Hogan, 1985). Second, the control problem is
* Corresponding author. Fax: + 49 521 106-2963; E-mail: jeff@biol28,uni-bielefeld.de.
0167-9457/95/$09.50 0 1995 Elsevier Science B.V. All rights reserved SSDI 0167-9457(95)00009-7

166 J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204
often underconstrained, allowing many solutions. This is true, for example, when shoulder, elbow and wrist are used to place the finger tips at a particular position in the plane of the arm. Many different arm configura- tions can be used to point to a given target as long as the target is not at the margin of the reachable space. In contrast, when such movements are carried out using only two joints, the number of degrees of freedom in the arm equals the number required by the task, so there is no redundancy and each target position corresponds to one and only one combination of joint angles. Many studies have considered pointing movements under non-re- dundant conditions (for reviews see Georgopoulos, 1986; Hogan, 1988); fewer have investigated the redundant case (Cruse et al., 1990; Flanders and Soechting, 1990; Soechting, 1984) although path-planning under such conditions has been considered qualitatively (Abend et al., 1982; Flash and Hogan, 1985). Thus, one important question in motor control is how humans utilize redundant degrees of freedom.
A system with redundant degrees of freedom cannot be controlled in a systematic fashion unless additional constraints are imposed. One possibil- ity, discussed by Bernstein (1967) in relation to motor learning, is simply to keep some joints locked in order to eliminate redundant degrees of freedom. Another possibility is to use extra degrees of freedom to optimize additional criteria or to perform additional tasks, such as controlling the orientation of the distal segment (Kawato et al., 1988). Several optimization criteria have been suggested in the context of human motor control and robotics. Examples of simple constraints for multi-joint manipulators are the requirement that, to the extent geometrically possible, all joints con- tribute equally to a movement or that all joints avoid their extreme positions. In the robotic literature, formal versions of these notions are found in the pseudoinverse solution of the kinematic problem (for review see Hollerbach and Suh, 1985) and in the manipulatability index of Yoshikawa (1984).
In humans, constraints used to determine resting arm postures, in which the same redundancy problem occurs, can be formulated as the minimiza- tion of a discomfort function, a kind of cost function representing the sum of separate cost functions defined independently for each joint (Cruse, 1986). Studies of simple pointing movements show that the cost functions determined under static conditions also influence joint configurations dur- ing movement (Cruse and Briiwer, 1987; Cruse et al., 1990). Other opti- mization criteria have been discussed in relation to movement of a single joint (Hasan, 1986; Nelson, 19831, to movement using two joints (Uno et al.,

J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204 167
1989) or to movement of the end-effector (e.g., Flash and Hogan, 1985; Flash, 1987). The movement of the end-effector uniquely determines joint movements only for the non-redundant case, so the latter studies do not explicitly address the problem of distributing movement among the joints. Some of the other criteria (e.g., minimizing joint torque changes: Kawato et al., 1988; Uno et al., 19891 extend in a natural way to systems with redundant degrees of freedom.
These formulations consider geometrical, kinematic and, in some cases, dynamic parameters of the arm segments, but otherwise they treat all joints as equivalent and ignore possible specializations among the joints. In fact, several previous studies of human arm movement suggest that dynamic factors are important and indicate that specialized strategies affect wrist movement. With respect to the former, movement duration and errors in direction and extent vary with target direction and the effective mobility of the arm (Ghez et al., 1990). With respect to the latter, wrist movement is not tightly coupled to shoulder and elbow movements (Lacquaniti and Soechting, 1982; Soechting, 1984; Lacquaniti et al., 1987). In movements around obstacles, the wrist also plays a special role, over and above that described by static cost functions (Briiwer and Dean, 1992; Dean and Briiwer, 1994a). Similarly, in making rhythmic movements involving multi- ple joints, the required movement is distributed among the joints in a way that correlates with the subjective comfort in making the movement with each joint alone and this behavior is apparently linked to dynamic costs associated with the different masses of the limb segments (Rosenbaum et al., 1991). In the robotics literature, a similar division of function is expressed in the micro-macromanipulator concept according to which a redundant, multi-link manipulator is decomposed into a distal micromanip- ulator capable of small, fast movements mounted on a macromanipulator capable of large, slow movements (Egeland et al., 1988).
According to this interpretation, the use of the wrist would be expected to vary considerably as a function of task requirements. Studies of move- ments around obstacles showed first, that the wrist was used much less than originally expected and second, that there was a considerable discrep- ancy between the relatively small wrist movement in normal pointing and the subjective impression of significant restriction when the wrist was immobilized with a brace (Briiwer and Dean, 1992). Therefore, the present study was undertaken to systematically study wrist movement in simple unobstructed movements using a pointer. Because the objective of the experiment was to measure the unforced use of the wrist, the experiments

168 J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204
focused on short movements in different directions from a starting point near the center of the workspace. For long movements or movements near the margin of the workspace, considerable wrist motion can arise from static cost functions and geometric constraints (Cruse, 1986; Hollerbach and Atkeson, 1985). Movement speed was varied to test the influence of dynamic parameters.
2. General material and methods
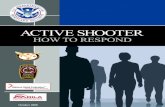
Arm movements were recorded using a manipulandum described in detail elsewhere (Dean and Briiwer, 1994a), so the present description will be brief. The subjects made pointing movements with the right arm held in the horizontal plane passing through the shoulder (Fig. 1). The subject was seated in front of a table located slightly below shoulder level. The right shoulder rested in a U-shaped holder at the origin of the Cartesian coordinate system for the workspace. The right hand gripped the vertical handle of a manipulandum moving over the glass plate covering the table. This handle was fitted with a pointer extending the line of the hand, as if substituting for an outstretched index finger in normal pointing. At the start of each session, the pointer was aligned with the line from the vertical axis of the wrist to the axis of the handle. Subjects controlled the position of the pointer tip by rotating the shoulder, elbow and wrist joints about their vertical axes. Holding the vertical handle firmly in a full-hand grip changed the wrist position of most subjects, depressing the wrist by 0 to 2 cm and causing wrist abduction of up to 14” relative to the line of the lower arm. This position was felt by some subjects to be less comfortable than a more relaxed grip, but it changed the extreme wrist movement in either direction by less than lo” in most subjects.
The subjects were students and faculty at the University of Bielefeld. They ranged in age from 23 to 49. All were right-handed and none suffered from a known neurological or neuromuscular abnormality. Subjects unfa- miliar with the manipulandum were given practice on a set of 22 move- ments spanning the workspace. Both authors participated in the initial experiment; the second author also participated in subsequent experi- ments. Except as noted below, subjects were asked to move as in free- handed pointing. They were given no explicit instruction concerning the use of the wrist (with the exception noted for Experiment 1) and the

J. Dean, hi. Briiwer/Human Movement Science 14 (1995) 165-204 169
Fig. 1. Diagram of the experimental set-up and the task definition in workspace as viewed from above.
With the right arm elevated horizontally, the subject moved the handle of a two-link manipulandum
over a table located slightly below shoulder level. The task was to move the tip of the pointer from the
center starting point to a target located in one of eight directions. In Experiment 1, the shoulder joint
was opposite the base of the manipulator (axis origin designated El), so the pointer lay between the
180” and 225” directions depending on the length of the subject’s arm (e.g., El: the pointer and arm
partially drawn). The movement distance was 10 cm and the 180” direction was omitted. In Experiments
2 to 4, the subject was moved to the right, as drawn, relative to the manipulator base and LED array. In
Experiments 2 and 3, all 8 directions were tested using 5 cm movements. In Experiment 4, movements
of 5, 10, 15 and 20 cm in the 0”. 90”, 180” and 270” directions were tested. Potentiometers on the three
axes of the manipulandum permitted the computer to determine the position of the tip and the angles
of the three arm joints. Joint angles were measured as external angles as shown.
experimental hypotheses and the parameters to be analysed were not disclosed.
The manipulandum, modelled on other inverted hand-position transduc- ers (Abend et al., 1982; Morasso, 19811, was modified to register all three joint angles. It consisted of a freely rotating handle and pointer mounted on two links which formed an approximate mirror image of the subject’s arm (Fig. 1). The proximal segment was 51 cm long from axis to axis. The distal segment was 63 cm long from axis to axis. The proximal segment was mounted on an axis which, in the first experiment, was located opposite the shoulder of the subject at (0, 1095) in shoulder coordinates (mm>. In subsequent experiments, the subject was moved between 12 and 20 cm to the right relative to the base of the manipulandum and the initial position

170 J. Dean, M. Briiwer/Human MoLiement Science 14 (1995) 165-204
for all test movements. The distal segment was suspended at a height of 15 cm above the table. The handle was a hollow plastic cylinder of 3 cm diameter, mounted below the tip of the distal segment. Attached to its lower end was a 23 cm pointer (weight 10.9 g) cut from a 1 mm thick aluminum sheet. For some experiments, the metal pointer was replaced by a transparent plastic pointer of the same size. This pointer length was originally chosen to approximately equalize the lengths of the three arm segments; it was used here to maintain consistency with previous studies (Cruse and Briiwer, 1987). Subsequent tests (Dean and Briiwer, 1994b) have shown that a long pointer slightly increases the amount of wrist movement in avoiding obstacles. All three axes of the manipulandum were mounted on twin ball-bearings. Together, handle and pointer weighed 109 g. Their moment of inertia was ca. 3 x low3 kg-m*. The distal segment weighed 330 g and, together with the handle, its moment of inertia around the middle joint of the manipulator was ca. 0.2 kg-m*. The proximal segment weighed 764 g. The total weight of the manipulandum was 1.2 kg. With the distal segment at right angles to the proximal segment, the moment of inertia of the whole was ca. 0.5 kg-m*. As a rule, the handle was not in contact with the table when a subject held or moved the manipulan- dum.
Precision, low-torque potentiometers (Megatron MCP40, 50 Kohm, lin- earity +O.l%) measured the angles at the base, middle joint and handle. These signals were sampled at 70 Hz by an A/D converter (AD-12 Bit, Kolter Electronic) in an AT-compatible 386 computer. To reduce the noise in the sampled potentiometer signals, the raw data were filtered using a 7-point moving average (relative weights 1,2,3,3,3,2,1; Hamming, 1977). These signals allowed the computer to determine the position of the pointer tip. A calibration check preceding each measurement ensured that the systematic error in the computed tip position was less than 5 mm. The noise in the potentiometer signals corresponded to standard deviations for the computed tip position of less than 2 mm. Variations in the systematic errors in the x and y components of the computed tip position were less than 0.5 mm and 1.5 mm, respectively, for the center area used in the present study.
These position measurements relative to the base of the manipulandum were then transformed into Cartesian X, y-coordinates relative to the shoulder joint (0, 0). The x-coordinate represents the lateral position, with positive values to the right, and the y-coordinate the distance in front of the shoulder. The data on the position and angle of the handle relative to

.I. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204 171
the shoulder, together with the measured lengths of the subject’s upper arm (acromium to lateral epicondyle of the humerus), lower arm (epicon- dyle to styloid process of the radius) and hand (styloid process to handle axis), allowed the computer to calculate the angles of the shoulder, elbow and wrist joints. The location of the wrist can be calculated from the position and orientation of the handle in workspace; given this position, the angles of the shoulder and elbow are uniquely determined. The noise in the potentiometer signals and the calculations of joint angles corresponded to standard deviations of less than 0.5” for shoulder and elbow angles and less than 1” for wrist angles. The data on tip position and joint angles were stored on disk for further analysis.
The computer controlled the presentation of starting points and targets by turning on LEDs (5 mm diameter) mounted in the table below the glass plate. The instructions to the subject were to move the pointer tip in a single motion from the initial position to the target. For each movement, the computer first turned on the LED at the initial position, which was the same for all movements in all experiments (Fig. 1). When the subject moved the pointer to within 5 mm of the center of this LED, the computer turned on the target LED. (This approach criterion was easily satisfied by the natural accuracy of all subjects.) The subjects were asked not to change the arm configuration after the target appeared. When the subject indi- cated readiness to begin a movement, the experimenter triggered the computer to issue an acoustic signal and begin recording data. In order to ensure adequate data preceding movement, the subject was instructed to pause briefly after the acoustic signal before beginning the movement. (The sampling rate deteriorated if the computer was asked to produce an acoustic start signal while recording data.) Recording continued until the subject indicated the movement was completed. No explicit demand was made concerning accuracy, but the latter may have been implicitly condi- tioned by the required proximity to the initial LED before a trial could begin. Trials were repeated if the subject moved too quickly after the start signal, so the initial configuration was inadequately sampled, or made discrete corrective movements at the target. As a rule, fewer than three trials were repeated in a session and no repetitions were necessary in many sessions.
Movement parameters were analyzed in several steps. First, the files containing the raw data were processed automatically to determine joint angles and movement parameters. The beginning and end of each move- ment were identified using two algorithms based on the velocity of the

172 J. Dean, M. Briiwer /Human MoLlemeni Science 14 (1995) 165-204
pointer tip tangential to the path. Beginning from the time of maximum velocity, the computer searched forward and backward in time until the velocity decreased below a given threshold (0.05 m/s as a rule, 0.035 m/s for the slow movements in the first experiment). This provided one mea- sure for the beginning and end of the movement. A better measure was obtained by continuing the search until the velocity decreased further (below 0.02 m/s and 0.01 m/s, respectively) and then calculating the means over 7 additional points to obtain values for the initial and final tip positions and for the corresponding joint angles. Then the temporal begin- ning and end were found by repeating the search to find the points where the tip was within 2 mm of these mean initial and final positions. The maximum and minimum angles within this interval were also recorded. In order to ensure that changes in movement durations determined in this way did not merely reflect differences in the final approach phase, dura- tions were also computed as the interval the velocity exceeded 50% of its maximum. The output files from this analysis were then processed to convert temporal values into differences relative to the beginning of move- ment, to compute absolute values of differences between initial and final joint angles and between maximum and minimum joint angles, and to insert identifiers for subject, direction, distance, test condition and repeti- tion number for each movement. Joint movements were typically unidirec- tional, so there was no qualitative difference between measurements based on the initial and final joint angles and those based on the maximum and minimum angles during the movement. Tip movement directions are de- fined relative to a 45” diagonal in the workspace which was close to the extension of the line of the lower arm (see Fig. 1).
Statistical analysis was performed using the Statgraphics (STSC Inc) Type III ANOVA. Fixed main factors were tested against their interaction with subject, the random factor. Two-way interactions between fixed effects were tested against the corresponding three-way interaction with subject added. When F values indicated significant main effects, the Neumann- Keuls procedure was used at p < 0.05 to compare pairs of individual means and define homogeneous groups. Trials were averaged by subject or by subject and trial condition unless otherwise noted. Standard errors (SE) are based on the corresponding ANOVA (i.e., the degrees of freedom for the denominator is that of the interaction term in the F-test, not the total number of trials). Plots were created by exporting the ANOVA table of means and 95% confidence intervals into Gnuplot (Unix Version 3.0, Free Software Foundation, copyright Thomas Williams, Colin Kelley).

.I. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204 173
3. Experiment 1
The first experiment was designed as an initial test of the influence of movement direction and speed on the use of the wrist in free pointing. Because wrist movements were generally small in our previous studies of unobstructed pointing, each session ended with two blocks in which sub- jects were asked to intentionally incorporate large wrist movements. This instruction was used to probe the potential sizes of wrist movements for comparison with those freely chosen and also to test whether increasing the use of the wrist negatively affected other measures of performance, such as movement speed and duration. Because the objective of the experiment was to measure the use of the wrist in the absence of strong geometrical or anatomical constraints (cf. Hollerbach and Atkeson, 1985), these tests were restricted to short (10 cm) movements from a starting point directly in front of the shoulder near the center of the workspace.
3.1. Method
Each subject (6 males, 2 females, aged 23 to 49) was tested in a single session containing 11 blocks. Each block consisted of one 10 cm movement in each of seven directions presented in random order. All movements began from the point (0, 580) in mm relative to the shoulder. The seven directions were arranged at 45” intervals, measured relative to the 45” diagonal in the workspace as illustrated in Fig. 1; the pointer lay between 180” and 225”, depending upon the length of the subject’s arm (e.g., the hand partially drawn in Fig. 1). The metal pointer obstructed the view of the LED at 180”, so this direction was not tested. The first nine blocks consisted of three repetitions of three speed conditions (comfortable, fast and slow). Trials 1, 5 and 9 were comfortable movements, 2, 6 and 7 were slow movements and 3,4 and 8 were fast movements. Speed and movement duration were specified relatively, not absolutely. The instructions for the first block were to move the pointer tip comfortably, as in freehand pointing, from the initial position to the target. The instructions for the other two conditions were to make faster or slower movements relative to the comfortable condition. For trials 10 and 11, the subjects were again asked to make fast movements, but in addition, they were told to consider before each trial whether - without changing the initial arm configuration _ a large wrist motion could be used to make the movement faster and then to try and do so.

.I. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204 174
25 --
20 -
15-
10 -
5-
O-
-5 -
-10 -
-15 -
slow -*----
comf - fast ..o-...
wrist -Y---.
-20 -I ,
25 - slow --c---- comf -
20 - fast .+- wrist -it-----
15- /
10 - / \, *__-.----L
5-
0 -_
25 - fast . . . . . .
:; - -wrist -+-- elbow
10 - 5- O-
-5 - -10 -
-15 -
-20 -
-25 _
0 45 90 135 180 225 270 315
movement direction [deg]

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 175
3.2. Results
Subjects varied considerably in the movement speeds and durations they chose for the comfortable condition, but the instructions led to the desired relative changes in duration and speed within each subject. Mean durations for different subjects ranged from 1 to 7 s for the slow condition (mean 3.2 s), from 725 ms to 1.9 s for the comfortable condition (mean 1.36 s), from 420 to 953 ms for the fast condition (mean 627 ms) and from 446 to 721 ms for the fast condition with as much wrist motion as possible (mean 577 ms). The difference between the two fast conditions was not significant (Neu- mann-Keuls test in conjunction with an ANOVA with movement direction and condition as factors).
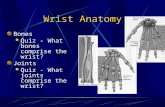
For geometrical reasons, the direction of joint movement varies with movement direction (Fig. 1, Fig. 2a and c). Moderate wrist extensions accompanied movements in the 0” to 90” directions and larger flexions occurred for movements in the 225” to 270” directions. Intentional use of the wrist reversed the mean direction of wrist motion for the 135” and 0” directions; it caused larger changes - reductions - in elbow movement than in shoulder movement (Fig. 2~).
The direction of elbow and shoulder movement was strongly determined by the movement direction, whereas wrist movements varied around a mean net movement near zero. As a result, percentages of congruent wrist and elbow movement (i.e., both flexing or both extending) were near 50% for most directions (48% to 68%). The one exception was for 135”, where only 15% of the wrist and elbow movements were congruent and elbow extension with wrist flexion was the most common pattern. In contrast,
Fig. 2. Net and absolute joint movement as a function of movement direction and speed in 10 cm movements. Wristmovement amplitude, plotted along the ordinate, is the difference between final and initial angles in (a) and the absolute value of this difference in (b); net movement of elbow and shoulder for the two fastest conditions are plotted separately in (c). Movement direction, plotted along the abscissa, is in degrees relative to the diagonal as shown in Fig. 1. Three curves show means for slow, comfortable (“comf’) and fast pointing, tested in three repetitions in a blocked design; local maxima occur for movement directions approximately at right angles to the line of the lower arm. The fourth curve (“wrist”) shows means for the final two trials in which subjects were asked to try to make faster movements by incorporating large wrist movements if possible. The results are from 8 subjects; the standard errors in the analysis of variance for part b were 1.4” for all conditions combined and 0.76” with the “wrist” condition excluded. The analysis of variance showed movement condition, direction and their interaction to be significant (see text). The standard errors for part a were 1.8” for the first three conditions and less than 2.5” for the “wrist” condition. The corresponding standard errors for part c were 1.6” and 2.2” for the elbow and 0.72” and 0.88” for the shoulder.

176 J. Dean, M. Briiwer /Human MoLaement Science 14 (1995) 165-204
congruent movements of shoulder and elbow were infrequent (< 17% congruent) for all but the 135” direction (75% congruent). This direction also was unusual in showing a disproportionate increase in peak velocity and wrist movement amplitude when the use of the wrist was intentionally increased; this was associated with a switch from wrist flexion and elbow extension to wrist extension and elbow flexion (Fig. 2a and c).
In order to remove the trivial effect of movement direction, means were computed for the absolute values of net wrist movement (Fig. 2b). When use of the wrist was not specified, the dependence of wrist movement amplitude on movement direction appeared to show a local maximum (Fig. 2b) at 90” (wrist extension) and the global maximum at 225” to 270” (wrist flexion) with minima at 135” and at 315” to 360” (= 00). When use of the wrist was explicitly requested, a single maximum of 23” occurred at the 270 direction and a minimum occurred at 0”. For comparison, amplitudes of shoulder and elbow movements both varied between 3” and 20” depending on movement direction. For fast movements in the 90” and 270” directions, where wrist movement was large, movement amplitudes of the elbow were 14.8” and 8.7” while those of the wrist were 5.1” and 9.4”, respectively. Net shoulder movement was close to zero for the 270” direction.
An analysis of variance for all 11 blocks (615 trials including 5 missing values) showed the amplitude of wrist movement to depend significantly on movement direction (F(6,42) = 5.07, p = 0.0005; means for 225” and 270 significantly larger those for 315”, O”, and 45” in pairwise Neumann-Keuls tests), on the speed condition (F(3,21) = 26.0, p < O.OOOl>, and on their interaction (F(18,126) = 2.46, p = 0.002). Thus, only the global maximum apparent in the means (Fig. 2b) reached significance. As one would expect, wrist movement was much larger when use of the wrist was explicitly requested (mean over all directions of 15.1” versus means of 3.2”, 3.8” and 4.8” for the slow, comfortable and fast conditions, respectively). All subjects increased their use of the wrist under this instruction. To place these figures in perspective, wrist movements of 1” and 10” with a lever arm of 310 mm (23 cm pointer plus 8 cm from wrist to handle) correspond to tip movements of about 5 and 54 mm, respectively.
Restricting the ANOVA to the first nine blocks (504 trials including one missing value; movement direction and speed condition as factors) again showed the amplitude of wrist movement to depend significantly on move- ment direction (F(6,42) = 4.13, p = 0.003; mean for 225” significantly larger than those for 315”, 0”, 45” and 135”) and on the interaction of direction and speed (F(12,84) = 2.37, p = 0.01). Movement speed tested as a main

J. Dean, M. Btiwer /Human Movement Science 14 (1995) 165-204 177
factor in the ANOVA - which ignores the inherent order of the three conditions - was not significant, but it was significant when included as a covariate with direction and subject as factors (F(l,lll) = 11.6, p = 0.0009). A slight increase (ca. 1”) in the mean wrist movement between the first and second repetitions of each block was not significant.
Peak tangential velocity and movement duration also varied according to movement direction (Fig. 3, F(6,42) = 17.68, p < 0.0001 for the former; F(6,42) = 5.8, p < 0.0002 for the latter), speed condition by design and the interaction between direction and speed condition (F(18,126) = 2.12, p <
0.0001 for the former; F(18,126) = 1.78, p < 0.03 for the latter). Over all four conditions and for the two fast conditions combined, peak velocity (Fig. 3a) was significantly lower for movements of 225” and 0” to 45”, which carry the pointer towards and away from the shoulder, and higher for movements of 90” and 270”, which move the pointer approximately at right angles to the line of the lower arm. Local maxima were present at the same locations but less pronounced for the comfortable and slow movements (Fig. 3a). The d’ erection effect was significant for the comfortable condition (F(6,42) = 3.25, p = 0.01, 90” g reater than 0” and 315”) but not for the slow condition. Mean peak velocity was highest when increased wrist movement was explicitly incorporated but not significantly different from the fast condition (p = 0.06). The dependence of peak velocity on direction resem- bled that for fast movements.
As one would expect, changes in movement duration (Fig. 3b) were approximately the inverse of those in peak velocity. Mean durations for the comfortable and fast conditions showed local minima at 90” to 135” and at 270” and maxima at 225” and at 0” to 45”. The slow movements showed a single maximum at 0” to 45” and a single minimum at 270”.
3.3. Discussion
In summary, the results show that the dependence of wrist movement amplitude on movement direction (Fig. 2b) has a maximum at 225” to 270” (wrist flexion) and minima at 135” and at 315” to 360” (= O”). The curves suggest a second local maximum at 90” (wrist extension), but this peak did not reach statistical significance. The data also indicate that peak velocities are larger and durations are shorter for movement directions in which wrist movement is larger. What factors contribute to this linkage? Is it causal or merely coincidental?

178 J. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204
4- *____---..._ --me_
3- -----.~-----_.._._______ +%.
“-..~__/-~
2 1
1
1’ :\ ‘= !k=~.+..:.,s_.,ss‘w .... . . .._. . . . . . . . .
“1 0 45 90 135 180 225 270 315
movement direction [deg]
Fig. 3. Peak tangential velocity and movement duration for 10 cm movements of different speeds and directions. Peak velocity (a) and movement duration (b) are plotted against movement direction for each of the four conditions of Experiment 1: slow, comfortable (“comf”) and fast pointing and fast pointing with large wrist movement (“wrist”). Local maxima in velocity and local minima in duration occur for movement directions in which wrist movement is larger (cf. Fig. 2).
In this initial experiment, the relationship between movement direction and the line of the arm varied from subject to subject due to differences in arm lengths, but the position of the pointer always lay between 180” and 225”. Thus, velocity was highest for movements nearly at right angles to the line of the lower arm. Hogan (1985) showed theoretically that mobility, the

.I. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 179
inverse of the effective inertia, is greater in these directions because shoulder and upper arm need not move. In the present experiments, net shoulder movement was very close to zero for 270”, the direction with the highest velocities. Velocities were slower for directions involving large shoulder movements. Overall, the results demonstrate that the subjects do not completely compensate for this anisotropy in order to keep peak velocity and duration constant.
Hogan also noted that moving only the wrist involves still less inertia. Thus, the increased use of the wrist in faster movements, excluding those for which wrist movement was requested, indicates that subjects take advantage of this difference in inertia. These differences are largest for movements approximately at right angles to the line of the hand and pointer, those close to the direction in which the tip moves when the wrist alone rotates.
Kaminski and Gentile (1989) focused on a different but related aspect: they found that movements performed by a single joint, either elbow or shoulder, were faster than movements of the same amplitude performed by combined shoulder and elbow motion. The savings were larger for the elbow. Kaminski and Gentile, citing Hogan, attributed the savings for the elbow to the lower effective inertia when only the lower arm moves. This situation is similar to the 270” movements of the present experiments, where shoulder movement was negligible.
Large wrist movement is not always associated with higher speeds and shorter durations. Considerable wrist motion was also present in move- ments towards the shoulder (225% but this occurred for geometrical reasons exaggerated by the pointer. As will be shown in the final experi- ment, a comfortable posture for pointing to these targets involves shoulder extension accompanied by wrist and elbow flexion. This geometrically conditioned use of the wrist was not accompanied by increased speed and decreased duration. Kaminski and Gentile (1989) noted that when two joints move together, their movement profiles tend to be synchronized, so the naturally faster movement of the elbow is retarded to match that of the shoulder. In other words, the joint with the slowest movement determines the movement time and there may be additional time penalties associated with coordinating multiple joints.
Kots and Syrovegin ‘(1966) focused on yet another aspect: studying movements in different parts of the workspace, they found that joint coordination was smoother in congruent movements than in non-congruent movements. They did not consider movement time. The present data do

180 .I. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204
not reveal any large advantages in speed or duration for congruent move- ments, although the evidence is not entirely clear. On the one hand, movements in the 135” direction, the one direction where shoulder and elbow movements were more often congruent, were not faster than those in other directions. On the other hand, wrist and elbow movements for this direction, unlike other directions, were generally not congruent. The in- crease in peak velocity for the 135” direction associated with intentional use of the wrist was achieved by reversing the coordination and making larger movements with the lightest segment - the hand and pointer, not by adopting a congruent coordination of wrist and elbow.
The wrist movements subjects make naturally are much less ( < 33%) than those they can make if asked to do so. (All targets are reachable while maintaining maximum wrist extension; all but the most distal three are reachable while maintaining maximum wrist flexion.) Significantly, fast movements with intentionally increased wrist movement were faster and lasted no longer than those with normal wrist movement, even when the change involved reversing the coordination of some joints. Thus, maximiz- ing speed cannot be the reason why the use of the wrist is small in natural movements.
4. Experiment 2
The second experiment was designed to confirm the effect of movement direction on wrist movement and test the effect of movement repetition under more rigorous conditions. The most important changes were the following: (1) test movements were shortened to further reduce the amount of wrist motion arising from geometric and comfort constraints, which were especially evident in movements toward the shoulder, (2) the relation between the lower arm and the test directions was standardized for each subject and (3) the eighth movement direction was included.
4.1. Methods
First, the test distance was reduced to 5 cm, so all targets could be reached with the full range of wrist configurations. Second, the shoulder restraint for each subject was shifted to the right until the most comfort- able arm configuration for pointing at the initial position placed the pointer and lower arm on the O”-180” diagonal (e.g., the position of the

J. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204 181
subject drawn completely in Fig. 1). However, subjects were not explicitly required to align arm and pointer with this diagonal. Because the chosen starting configurations varied in the course of testing and because the hand and pointer were not always in line with the lower arm in a subject’s most comfortable posture, the alignment was not perfect, but it was more consistent from subject to subject than in the first experiment. Third, the shorter movement and the use of a transparent pointer allowed the target in the eighth direction (180”) to be clearly seen, so it was included. Fourth, the single test session contained three parts; the sequence of trials was identical for all subjects. The first part contained three blocks in which each of the 8 directions appeared once in a predetermined, pseudorandom order. In the second part, movements of 90” and 270” were first repeated 10 times each in a pseudorandom sequence which ensured that each direction was represented either 2 or 3 times in each group of five (part 2a). Then the same sequence was repeated for movements of 0” and 180” (part 2b). Part 3 was a repetition of part 1. The structure of the sequence was not explained to the subjects. The subjects were instructed to make comfortable movements, as in freehand pointing, from the initial position to the target. Twenty-eight subjects were tested. Six subjects used in both this experiment and Experiment 3 were tested twice at an interval of several months; the means of the two sessions were used in the analysis.
4.2. Results
The results confirmed the basic findings of Experiment 1 with respect to movement direction. In the combined results from parts 1 and 3 (1632 trials with 16 missing values), where all eight directions were tested together, the amplitude of wrist movement depended significantly on movement direc- tion (Fig. 4a; F(7,189) = 3.87, p < 0.0006). Wrist movement was signifi- cantly larger (means of 2.2” to 2.5”) for the directions 90” and 225” to 270” - directions approximately at right angles to the line of the lower arm - and smaller for the directions 315” to 45” and 135” (means of 1.3” to 1.4”). For comparison, means for absolute elbow and shoulder movements for differ- ent directions ranged from less than 1” to as much as 10” (Fig. 4b). In particular, the amplitude of elbow movement was always larger than that of the wrist, even for the directions eliciting large wrist movements (5.1”, 9.2 and 3.9” for the 90”, 225” and 270” directions, respectively; cf. Fig. 4b). In the overall averages, wrist and elbow movement tended to be congruent, that is, to have the same sign, whereas shoulder movement was opposite in

182 .I. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204
lo- 8- 6- 4- 2- O- -2 - -4 - -6 - -8 -
-10 -
shoulder ...-.....
I
0 45 90 135 180 225 270 315
movement direction [deg]
Fig. 4. Mean joint movements for 5 cm movements as a function of direction. Movement direction, plotted along the abscissa, is in degrees relative to the diagonal as shown in Fig. 1. The shoulder restraint was moved to the right so that the lower arm and pointer were approximately aligned with the 0” direction. Subjects were asked to make comfortable movements. The results are from the 28 subjects of Experiment 2. The means are based on the averages for each subject over the first and third parts of the test sequence. (a) The amplitude of wrist movement depends significantly on direction (F(7,189) = 4.62, p < 0.0001); it is maximal for directions approximately at right angles to the line of the lower arm and pointer (90”, 225” and 270”). The standard error for the means using the variance estimate from the analysis of variance is 0.28”; the plot shows the corresponding 95% confidence intervals. (b) Net joint movement of all three joints also varies in both sign and amplitude with movement direction (for movement amplitudes of shoulder and elbow F(7,189) = 731, p < 0.0001 and F(7,189) = 178, p < O.OOQl, respectively). For obvious reasons, the directional dependence is stronger for net wrist movement than for its absolute value (note differences in scale for (a) and (b)). The standard errors are 0.20” for the shoulder, 0.44” for the elbow and 0.52” for the wrist.

J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204 183
800
0 45 90 135 180 225 270 315
movement direction [deg] Fig. 5. Peak tangential velocity and movement duration for 5 cm movements as a function of movement
direction. The results are from the 28 subjects of Experiment 2 in which subjects were asked to move at
a comfortable speed. The means contain the data from the first and third parts of the test sequence.
The standard errors for the means using the variance estimate from the analysis of variance were 0.0022
m/s for peak velocity and 12 ms for movement duration; the plot shows the corresponding 95%
confidence intervals. Maxima in peak tangential velocity and minima in duration occur for movement
directions in which wrist movement is large and shoulder movement is small (90” and 270”, cf. Figs. 4a
and 4b).
sign. Percentages of congruent movements for wrist and elbow ranged from 40% to 72% for different directions; those for elbow and shoulder were higher for the 90” and 270” directions (23% and 74%, respectively) and less than 4% otherwise.

184 J. Dean, M. Briiwer / Human MoL~ement Science 14 (I 995) 165-204
a) %? 3 * 5 - mixed1 --*---- 9 separate -
mixed2 .+--..
5 ‘C - B 1
0 90 180 270
movement direction [deg]
O-l
0 90 180 270
movement direction [deg]
Fig. 6. Changes in the amount of wrist movement with repetition of 5 cm movements along one
orientation. Wrist movement amplitude is plotted against movement direction for the three parts of the
test sequence used in Experiments 2 and 3. In parts 1 (“mixedl”) and 3 (“mixed2”), all four directions
were tested together; in part 2 (“separate”), first the 90” and 270” movements were tested together 10
times each and then the 0” and 180” movements. In all three parts, wrist movement is larger for the
movements at right angles to the line of the pointer and lower arm. (a) In the results of Experiment 2,
the dependence of wrist movement on direction tends to be stronger in parts 2 and 3, but only direction
is a significant factor. Neither location in the sequence nor its interaction with direction were
significant. The standard error from the analysis of variance was 0.19”. (b) In the results of Experiment
3, plotted separately for comfortable and for fast movements, only the directional dependence was
significant for comfortable movements. For fast movements, direction, location in sequence (part 3 > part 1) and their interaction were all significant. The standard errors from the ANOVA were 0.34
and 0.42” for comfortable and fast movements, respectively.

J. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204 185
Peak velocity and movement duration also depended on movement direction (Fig. 5; F(7,189) = 19.67, p < 0.0001 for the former and F(7,189) = 23.05, p < 0.0001 for the latter). Peak velocity was significantly higher for movements of 90” and 270” (each tested alone, using the Newman-Keuls procedure) compared to any other direction. These are the directions for which wrist movement was largest and shoulder movement smallest. Move- ment duration showed approximately the inverse relationship: of the four homogeneous groups, the one with the longest durations contained the 45”, 180” and 225” directions and the one with the shortest durations the O”, 90”, 135”, 270” and 315” directions. There was no saving in duration or increase in peak velocity for 225”, the third direction where wrist movement was large. Here, shoulder and elbow movements were rarely congruent (1.5% of trials) and absolute shoulder movement was appreciable (mean of 6.6”).
The results again showed only weak effects of movement repetition, but these were generally in the direction of increased wrist movement. For example, mean amplitudes of wrist movement for all directions combined were 1.97”, 2.22” and 2.03” for the three parts (F(2,54) = 1.23, p = 0.3). Neither did the interaction with movement direction reach significance (Fig. 6a; F(6,162) = 2.02, p = 0.065), but the trend was for the direction dependence to be weakest in part 1 and strongest in part 2, when move- ments along one orientation were repeated in series. When movements at right angles or parallel to the line of the lower arm were tested separately and repeatedly (Fig. 6, “separate”), mean wrist movement for the 90” and 270” directions was larger than when all directions were tested together (Fig. 6, “mixed”), but the difference was less than 0.5 degrees and not significant (F(1,42) = 2.42, p = 0.13, comparing parts 1 and 3 versus part 2). Changes in wrist movement when the 0” and 180” directions were tested repeatedly were even smaller. The values for part 3, a repetition of part 1, were similar to those of part 2 except that wrist movement for the 270 direction was more like that of part 1. The basic dependence of wrist movement on direction was, of course, significant for all three parts combined: F(3,81) = 3.58, p = 0.017 with 0” and 180” forming one homoge- neous group and 270” and 90” a second.
Similar patterns occurred for peak velocity and movement duration over all three parts: peak velocities were highest and durations were shortest for the 90” and 270” directions. Most subjects were similar with respect to all three parameters. For wrist movement, for example, mean amplitudes over all directions for 24 of the 28 subjects were less than 2.5”; the largest mean was less than LO”.

186 .I. Dean, M. Briiwer / Human Movement Science 14 (I 995) 1 L-204
4.3. Discussion
In summary, these results replicate the findings of Experiment 1 using shorter movements in which geometrical constraints are proportionally smaller. The dependence of wrist movement on direction is clearer and sharper due to the alignment of the lower arm and pointer with the array of test directions: wrist movement is larger when the movement is approxi- mately at right angles to the line of the pointer and lower arm. In this case, wrist or elbow movement alone could bring the pointer close to the target. In fact, both were used, but mean elbow movement in degrees was at least 50% greater than mean wrist movement. The smaller change at the wrist qualitatively agrees with the cost functions for static arm configurations: the slope parameter governing the cost for deviations from the most comfortable joint angle is typically larger for the wrist than for the elbow (see Experiment 4). (For wrist and elbow to contribute equally to tip movement, a criterion included in some control models (e.g., Cruse and Briiwer, 19871, the angular change in the wrist would have to be about twice that at the elbow because the lever arm controlled by the wrist is only about half as long.)
Peak velocity was usually higher and movement duration was shorter for the directions eliciting larger wrist movements. These directions are nearly at right angles to the line of the lower arm and hand, the directions for which shoulder movement is small (Fig. 4b) and mobility is high (Hogan, 1985). Thus, the results again show that subjects do not compensate for this anisotropy to keep peak speeds and durations constant. Large wrist move- ments are not necessarily accompanied by increases in peak velocity, as shown by the 225” direction. This was a diagonal movement involving considerable shoulder motion.
Practice or repetition of movements of one orientation enhanced the dependence of wrist movement, peak velocity and duration on direction, but the effects were small and generally not significant.
5. Experiment 3
In this experiment, the influence of movement speed on wrist motion described in the first experiment was re-examined using the short move- ments and protocol of the second experiment. The expectation was that the dependence of speed and wrist movement on direction would be enhanced

J. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204 187
by standardizing the relationship of the arm to the test directions, by including all eight directions and by reducing the amount of wrist move- ment elicited for other reasons.
5.1. Methods
Eleven subjects were first tested with the same protocol and instructions used in Experiment 2: they were asked to make comfortable movements from start to target. Immediately thereafter, they were retested with the same series of movements but with the instruction to move as quickly as possible. No instruction was given concerning the use of the wrist.
5.2. Results
When asked to move quickly, the amount of wrist movement increased significantly (Fig. 7a; F(l,lO) = 6.43, p = 0.03). Direction was also a signifi- cant factor (F(7,70) = 8.65, p < 0.0001) as was its interaction with move- ment speed (F(7,70) = 3.48, p = 0.0029). The changes with speed were largest for movements in the 90” and 270” directions; for each of these directions, the increases were significant when tested alone (ANOVA with the speed instruction as the single factor: for 90”, F(l,lO) = 7.79, p = 0.02, with increases in 8 subjects and small decreases in 3 and for 270”, F(l,lO) = 5.22, p = 0.045 with increases in 7 subjects and decreases in 4). Overall changes in wrist movement for the fast movements - all increases relative to the comfortable movements - were significant for 6 of the 11 subjects tested alone. For the fast condition, three of the subjects had means of 9” to 11” for the 90” and 270” directions, indicating that the 5 cm movement was performed almost entirely by the wrist. The 90” and 270” directions were also the two with the highest peak velocities (Fig. 7b; F(l,lO) = 34.3, p = 0.0002; 90” and 270” forming a homogeneous group) as well as the shortest durations (Fig. 7c; F(l,lO) = 87, p < 0.0001; 90” and 270” again forming a homogeneous group). The interactions between speed condition and direction were significant for peak velocity (F(7,70) = 7.07, p < 0.0001) but not for duration (F(7,70) = 1.6, p = 0.14). The four subjects with the largest increases in wrist movement were the four with the largest increases in peak velocity (Fig. 8); they included both first-time subjects and subjects having much experience with the manipulandum (including one author).
For the fast but not for the comfortable condition, use of the wrist increased with repetition (Fig. 6b). In an ANOVA with part in the

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204
8- comf -
7 - fast . . . . . . . . .
0.3 -
. ..’ /..Ix..
0.25 -
I .._.__.... p....‘...
. . . . . . . . .
“I.... . . ._ 3 __. . . -f’;
. . . . .J. ‘.....
o 2 ‘...,. . ..*. ~
900 -
300 -
0 45 90 135 180 225 270 315
movement direction [deg]

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 189
sequence and the four directions used in all three parts as factors, part (F(2,20) = 3.58, p = 0.047; part 3 significantly greater than part 11, direc- tion (F(3,30) = 11.0, p = 0.0001; 90“ and 270” forming one group, 0” and 180” forming a second) and their interaction (F(6,60) = 2.64, p = 0.024) were all significant. Compared to part 1, use of the wrist increased for the 270” direction in part 2 and remained high in part 3; it increased for the 90” direction in part 3. For the comfortable condition, only the direction effect was significant (F(3,30) = 2.98, p = 0.047).
5.3. Discussion
These results confirm the link between movement speed and wrist movement found in Experiment 1 as well as the direction dependence of wrist movement, peak velocity and movement duration found in Experi- ments 1 and 2. As in the latter, the orientation of the arm relative to the test movements suggests that the changes in speed and duration are due to the anisotropic relationship between movement direction and the effective inertia or mobility of the arm (Hogan, 1985). The anisotropic mobility becomes more noticeable when faster movements are required.
Differences in mobility can also explain the change in the use of the wrist. Rotation of the wrist and elbow both move the tip of the pointer in approximately the same direction, but the mass moved by the wrist is less so its mobility is higher. When asked to move faster, the subjects as a group adjusted the relative contributions of wrist and elbow to take advantage of this higher mobility. This change shows that, in controlling the redundant degrees of freedom of the arm, subjects consider dynamic factors as well as postural factors such as postural costs or comfort (Cruse et al., 1993). This change in the use of different joints depending on speed is analogous to that reported by Rosenbaum et al. (1991) for rhythmic movements.
However, not all subjects took advantage of the higher mobility of the wrist. In the fast movements, wrist motion over all directions increased
Fig. 7. Effect of movement speed on wrist movement amplitude, peak velocity and movement duration
as a function of direction. Eleven subjects were first asked to move at a comfortable speed C‘comf’) in
making the 5 cm test movements of Experiment 2 and then asked to repeat the sequence making fast
movements (“fast”). (a) When asked to make fast movements, larger increases in wrist movement occur
for movements at right angles to the line of the pointer and lower arm (90” and 270”). (b, c) These
increases in wrist movement are accompanied by the highest peak velocities and shortest movement
durations. The corresponding standard errors using the variance estimate from the ANOVA were ca.
0.37” in part a, 0.0042 m/s in part b and 19 ms in part c.

190 J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204
o-lo
f
I
12 3 4 5 6 7 8 91011
subject number
Fig. 8. Intersubject variability in the effect of movement speed on wrist movement amplitude and peak
velocity. The figure plots overall means for wrist movement amplitude (a) and peak velocity (b) for the
eleven subjects of Experiment 3 when asked to move comfortably (“comf’) or quickly (“fast”). N for
different means ranges from 81 to 88; the corresponding standard errors for the means using the
variance estimate from the analysis of variance were ca. 0.22” for wrist movement and ca. 0.004 m/s for
peak velocity.
considerably in four subjects but not at all in four others. These differences among subjects point to individual strategies not tightly related to experi- ence with the manipulandum. Not increasing wrist movement with speed was not equivalent to keeping the wrist fixed: one subject used large wrist movements in both conditions.

.I. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 191
6. Experiment 4
The previous experiments focused on short movements, those in which wrist changes caused by postural factors could be assumed to be small and the lever arm of the wrist was quite sufficient for the wrist alone to perform the entire movement in some directions. In the final experiment this restriction was removed in order to examine the use of the wrist in longer movements. In addition, because the tests involved more of the workspace, this context was more suitable for comparing the use of the wrist specific to movement with that conditioned by postural factors.
6.1. Methods
Twenty-three subjects, all previously tested in Experiment 2 or 3, per- formed movements of 5, 10, 15 and 20 cm in four directions (O’, 90”, 180” and 270”). The protocol was similar to that of Experiment 2: the lower arm was aligned with the 0” to 180” direction and the test sequence was arranged in three parts. The first and third parts each consisted of 2 blocks, each containing all 16 movements in random order. The second part (2a and 2b) contained four blocks, each containing the 8 movements in the 90” and 270” directions in random order, and then another four blocks repeat- ing the same sequence for the 8 movements in the 0” and 180” directions. The subjects were instructed to make comfortable pointing movements.
In order to estimate the amount of wrist movement specified by postural factors, subjects were also asked to find and hold the most comfortable posture for placing the pointer at each of 30 points in a grid covering the workspace. The stationary arm configurations were recorded and stored. These measurements were obtained for 22 of the 23 subjects. For each subject, a set of cost functions for the three joints was found using simulated annealing (Kirkpatrick et al., 1983) as described by Cruse et al. (1990,1993). The cost or discomfort functions were assumed to be symmet- ric parabolas; the angle of minimum cost and the coefficient of the parabola were fitted under the condition that the shoulder coefficient equal 1.0. In accord with the minimum cost principle, the static arm posture for any given position is chosen so as to minimize the sum of the costs for the three joint angles. In the simulated annealing, fits were evaluated according to the total squared deviation between measured angles and those predicted by the minimum cost principle for all three joints and all 30 test points. In a final step, the best fitting cost functions

192 J. Dean, M. Briiwer/Human Movement Science 14 (1995) 16.5204
were used to determine the net joint movement to be expected solely on the basis of postural constraints in making each of the 16 test movements.
6.2. Results
Both direction (F(3,66) = 18.0, p < 0.0001, 180” significantly different from the other three), distance (F(3,66) = 90.1, p < 0.0001, all four dis- tances distinct) and their interaction (F(9,190) = 36.5, p < 0.0001) signifi- cantly affected the measured wrist movement (solid lines in Fig. 9a). Only for the shortest distance (5 cm) was wrist movement largest for the 90” and 270” directions (upper arrow at 5 cm in Fig. 9a; for an ANOVA restricted to the shortest movement: F(3,66) = 12.0, p = 0.016, 90” > o”, or testing 90” and 270” against 0” and 180”, F(1,22) = 5.51, p = 0.03). At each distance, means for 90” were larger than those for 270” but the difference was not significant. With increasing distance, wrist movement increased only gradu- ally for these two directions, compared to the steep increase for the 180” direction. For the 0” direction, wrist movement increased gradually up until the longest movement, where the movement approached the margin of the workspace and required full extension of the arm.
Shoulder movements (Fig. 10) were larger and increased more rapidly with distance for the 0” (flexion) and 180” (extension) movements (means of ca. 10” for the shortest movement and ca. 40” for the longest) than for the 90” (flexion) and 270” (extension) movements (means of 0.7” and 7”, respectively). The pattern of elbow movement was more like that of the wrist except that the relative positions of the movements in the 0” (exten- sion) and 180” (flexion) directions were exchanged: elbow movement (ex- tension) was largest for the 0” direction.
Peak velocity over all distances (Fig. 9b) was higher for the 90” direction (wrist extension) than for the 270” direction (wrist flexion) and both were higher than for the 0” and the 180” movements (F(3,66) = 26.4, p < 0.0001; 90” > 270” > o”, 1800). Distance, of course, was also a significant factor as was its interaction with direction (F(9,190) = 5.75, p < 0.0001; faster in- creases for the 90” and 270” directions). For all distances, mean durations for the 90” and 270” movements were about 200 ms less than those of the 0 and 180” movements (F(3,66) = 61.5, p < 0.0001; 90”, 270” > O”, 180”). The interaction was also significant (F(9,190) = 3.37, p = 0.0007).
Repetition produced only weak effects. Mean amplitude of wrist move- ment increased monotonically over the three parts; that of part 3 was significantly greater than that of part 1 and that of part 2, where move-

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204
20 - data model A _.*.... - ..+ . . .
180 - ..&__.. ,2 _ 270 - ..* . . . .
OS- 0 - go _‘+----
180 ..o__..
0.4 - 270 _+.____
193
5 10 15 20
movement distance [cm]
Fig. 9. Effect of movement distance and direction on net wrist movement and peak velocity. (a) Means for wrist movement amplitude from 23 subjects (“data”) are shown as a function of movement direction
and distance. For comparison, the amplitudes to be expected solely on the basis of static comfort
functions (“model”) are also shown. The simulation results are based on cost functions fitted to data sets on static arm postures for the same subjects. The brackets at the right connect measurement and
simulation results for each direction. The standard error for the means using the variance estimate from
the analysis of variance was 0.5” for the measurements and 0.26” for the model. For all directions, the
minimum cost function model predicts less wrist movement than actually measured. For the shortest
movement, it predicts wrist movement for the 90” and 270” directions (two curves at the lower arrow at
5 cm) to be less than that for 0” and 180” movements: in fact, wrist movements was largest for the former directions (two curves at the upper arrow at 5 cm). (b) Means for peak tangential velocity. The
standard error was 0.005 m/s.

194 J. Dean, M. Briiwer /Human Movement Science 14 (1995) 165-204
40 _ 180 ..P---- 270 +---
30 -
40 -
30 -
20 -
lo-
00 5 10 15 20
movement distance [cm] Fig. 10. Net movement of shoulder and elbow as a function of movement distance and direction. Means are from 23 subjects. The standard errors for the means using the variance estimate from the analysis of variance were 0.28” for the shoulder and ca. 0.49” for the elbow.
ments along one orientation were tested repeatedly (F(2,44) = 9.8, p =
0.0003). However, the effect was less than 1” over all directions and distances. Peak velocity for most distances and directions increased during part 2 and then declined slightly in the final part (F(2,44) = 4.04, p = 0.024, part 2 and part 3 faster than part 1 by ca. 0.02 m/s), whereas movement duration changed in the opposite direction (F(2,44) = 5.53, p = 0.007, part 2 and part 3 shorter than part 1 by ca. 50 ms>. Both effects were small,

J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204 195
The amount of wrist movement predicted according to the postural comfort functions (dotted lines in Fig. 9a> also depended on movement distance (F(3,63) = 42.2, p < 0.0001; all distinct), direction (F(3,63) = 26.7, p < 0.0001; 270”, 90” < 0” < 180”) and their interaction (F(9,189) = 21.3, p < 0.0001). The slopes of the dependence on distance increased in the order 270”, 90”, 0” and 180”. Predicted movement was less than that actually observed and, for the shortest movement, it was less for the 90” and 270 directions than for the 0” and 180” directions (lower arrow at 5 cm in Fig. 9a), the reverse of that actually measured (upper arrow at 5 cm in Fig. 9a).
One aspect of the fitted parameters for the cost functions is worth noting: slopes for wrist movement are steeper than those for the elbow (median coefficients of 1.1 and 0.45, respectively; p < 0.0005 in a Wilcoxon paired rank test).
6.3. Discussion
In summary, the results show systematic changes in joint movement with distance, as one would expect from the smooth changes in the underlying geometrical relationships. For all directions, wrist movement increased with movement amplitude; it was not invariant, as Lacquaniti et al. (1987) found for drawing and writing continuous figures within a workspace of similar size. Over all distances, wrist movement was least for 0”, larger for 90” and 270” and largest for 180”, but for short distances, wrist motion was largest for the 90” and 270” directions, as in previous experiments. These are the two directions for which the wrist can naturally perform the major part of a short movement. Its contribution to short movements in these directions is considerably greater than would be expected on the basis of the difference in the most comfortable static postures, indicating an active incorporation of the wrist into movement per se. When movement distance declines to zero, the curves for absolute wrist movement should go to zero or a small value reflecting the random fluctuations in wrist angle and in its measurement. However, extrapolating the present data suggests that the relative contribution of the wrist to movements in the 90” and 270 directions may at first increase even further for movement slightly shorter than 5 cm.
The steep increase in wrist movement for the 180” direction represents geometric constraints, as shown by the steep increase calculated according to the minimum cost model. However, it may also reflect an aiming strategy

196 J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204
in which wrist and elbow flexion are combined to improve target visibility and to position the wrist for participation in final corrections.
As in previous experiments, peak velocities were faster and durations were shorter for the two directions requiring less shoulder movement, 90” and 270”. Comparing these two directions, peak velocities were faster and wrist movement tended to be larger for movements away from the midline (90”) than for those in the opposite direction (270”), but these differences were not significant and they were much smaller than the differences between these two directions and the two parallel to the line of the lower arm and pointer. The large wrist movements for longer movements in the 180” direction were not associated with reduced movement durations.
The cost functions were used here to provide a measure for the move- ment to be expected from postural constraints alone. For this purpose, it was sufficient that they indicate the direction of the expected difference between movements parallel and at right angles to the line of the hand and lower arm. However, several limitations should be noted. First, for a given set of cost functions, the model is not subject to random fluctuations or measurement noise, both of which will inflate the measurements of abso- lute wrist movement (but not the net movement). As an example of this variability, means for the initial wrist angles assumed by a subject often varied by lo”. Second, the cost functions were assumed to be parabolic, but their true form is unknown and this approximation can affect the arm configurations predicted by the model. Cruse (1986) stated that final, comfortable postures for a given target are independent of the movement made to reach the target. If this were strictly true, the calculated values and measurements should agree perfectly. Mean wrist movements calcu- lated for the model do agree with the measurements to within a couple of degrees for three directions - similar to the measurement accuracy of Cruse (1986), but they diverge by about 12” for the 180” direction. Third, both factors mentioned above also contribute to the errors in fitting the data sets recorded for estimating cost functions. Averaged over all test points, the size of the deviations ranged between 3” and 7” per joint angle in different subjects, but deviations for points within the part of the workspace used for the experiments were smaller. In this region, the average deviations were within a half a degree of the measured values for shoulder and elbow and within one degree for the wrist. Further work is necessary to improve the fits provided by the cost functions, but the present accuracy is sufficient to show qualitatively that the observed use of the hand represents an active incorporation of the wrist into movement rather

J. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204 197
than the consequence of simply assuming the most comfortable posture at the initial and final positions.
7. General discussion
The present experiments were undertaken as part of a general analysis of how humans utilize the redundant degrees of freedom present in the arm and what factors affect the use of the wrist. One motivation was the finding that the wrist was used less than expected in both unobstructed pointing and obstacle avoidance when the test movements were large (30 to 40 cm) and covered a large part of the workspace (Briiwer and Dean, 1992). The wrist can contribute little to such large movements because its lever arm is short, even with the pointer. Shoulder and elbow must perform the bulk of the movement. The hypotheses tested here were that the wrist might be used more in short pointing movements, where its potential contribution is larger, and in faster movements, where the smaller moment of inertia can be used to advantage. The results support these hypotheses both for the subjects as a group and for many subjects as individuals.
The changes in wrist movement, representing choices by the subjects, must be considered in the context of potential alternatives. The discussion will begin with those related to comfortable movements and then consider those related to movement speed.
In the present experiments, hand and pointer orientation at the target were not specified, so the arm has a redundant degree of freedom which can be used in different ways. However, the geometry of the arm does impose constraints. First, redundancy is reduced for positions near the margin of the workspace because the set of possible arm configurations is reduced (Hollerbach and Atkeson, 1985). This was one reason for choosing to study short movements in the center of the workspace. Second, for short movements parallel to the line of the lower arm, the effective redundancy is much reduced because neither the wrist nor the elbow can substitute for the shoulder in a simple way and assume the major role. In contrast, for short movements at right angles to the line of the lower arm, the effective redundancy is large because wrist movement or elbow movement or a combination of both can be used. Many subjects were conscious of this alternative. One subject, for example, employed a large wrist movement in the first trial in part 2 of Experiment 2, where 90” and 270” movements were tested repeatedly. Then this subject remarked on the possibility of

198 J. Dean, hi. Btiwer /Human Movement Science 14 (1995) 165-204
using either wrist or elbow for these movements and subsequently per- formed them almost exclusively with the elbow.
Variability in the coordination of hand movement with that of the proximal joints has been noted previously with respect to wrist adduction (Soechting, 19841, forearm pronation (Lacquaniti and Soechting, 1982) and wrist movements in writing and drawing (Lacquaniti et al., 19871, leading to the conclusion that the hand can be controlled independently. The task studied by Soechting (1984) involved placing the finger tip in a shallow cylindrical target at variable heights on a vertical surface, so it may have somewhat constrained the orientation of the hand and fingers at the target. Variability in wrist coordination was particularly evident in the final ap- proach to the target, apparently reflecting adjustments to control both the final position and orientation of the hand. However, variability can also occur earlier in movement (Lacquaniti and Soechting, 1982). A mixture of independence and interdependence of movements at the wrist and at the proximal joints is still more pronounced in grasping (Jeannerod and Marte- niuk, 1992), where task constraints on hand shape and orientation are stronger.
Together, these results show that the wrist can be used in various ways depending on the task. Previous studies of simple pointing have shown that resting wrist angles are coordinated with those of other joints in a system- atic way that can be described by cost or discomfort functions (for a review see Cruse et al., 1990). The present results demonstrate that several other factors also contribute.
The results from the first experiment show that all subjects can incorpo- rate large wrist movements when asked to do so. Thus, volition is one factor. In natural pointing, however, most subjects use much smaller wrist movement. The extra degree of freedom represented by the wrist is not entirely frozen, a possible strategy suggested by Bernstein (19671, but it makes a minor contribution to tip movement in most subjects (see also Lacquaniti et al., 1987). As a result, intersubject variability was large relative to the systematic effects. Intersubject variability was also evident in the relative sizes of the direction dependence measured in the different experiments. This individual variation did not appear to relate to short-term adjustments or learning. When such short-term effects were probed by repetitions of movements with the same orientation, changes in wrist movement and kinematic parameters were small. However, the direction of the changes at the wrist did agree with Bernstein’s (1967) hypothesis that redundant degrees of freedom are gradually incorporated into movements.

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 199
Despite the individual variation, the dependencies of wrist movement, duration and peak velocity on movement direction are consistent and can be found in most subjects. Depending on the point of view, the dependence of wrist movement on direction may or may not be surprising. Equal amounts of wrist movement for all directions might be expected on the following grounds: (1) the feeling that there is no real need to move the wrist at all in short movements, (2) the assumption that the wrist’s purpose is to make small corrections and (3) the subjective impression that changes in postural comfort for short movements in the center of the workspace are small. However, the wrist can contribute most naturally to movements at right angles to the line of the hand and pointer, so it is not surprising that wrist movement is larger for these directions. Nevertheless, according to the minimum cost model, wrist movement should actually be smaller for these two directions. Therefore, the incorporation of wrist movement does not solely reflect static postural costs; it must also reflect dynamic factors.
Before turning to these dynamic factors, the relative contributions by wrist and elbow are worth consideration. In most trials, wrist and elbow moved in the same direction (i.e., congruently), but wrist movement was much less than that of the elbow. This difference is consistent with the static cost functions: the increase in cost or discomfort as the wrist moves away from its most comfortable position is steeper than that for the elbow. However, the difference does show that the control system does not implement an equal distribution of movement among those joints which can potentially contribute. Some models (e.g., Cruse and Briiwer, 1987) include a modified version of the standard pseudoinverse control which tends to equalize contributions to tip movement rather than joint velocities. This mechanism should cause the wrist to move twice as much as the elbow because its lever arm is half as long, a prediction which clearly does not fit the data.
A connection between wrist movement and dynamic factors is suggested by the association of increased wrist motion with decreased movement duration and increased peak velocity, particularly when the geometry would allow the movement to be performed almost entirely by the wrist. When geometric constraints or aiming strategies required that large wrist movement be accompanied by considerable shoulder movement, as for the 180” direction, peak velocities were not increased and durations were not shortened.
Because large wrist movements are not invariably associated with higher peak velocities and shorter durations, other factors must contribute to the

200 J. Dean, M. Briiwer /Human Morlement Science 14 (1995) 165-204
latter. The geometry of the arm creates several anisotropic relationships affecting movement parameters. Hogan (1985) showed that the effective inertia or, conversely, the mobility of the arm has an ellipsoid dependence on movement direction. When the wrist is fixed, the ellipse is aligned such that the inertia is lower for movements at right angles to the line of the lower arm. Intuitively, this relationship arises because small movements in these directions do not set the upper arm in motion and the effective inertia is determined solely by that of the lower arm. (A similar analysis applies to the manipulandum, but the manipulandum cannot be responsi- ble for the observed differences because the analogous ellipse for the manipulandum is roughly at right angles to that for the arm: the effective inertia of the manipulandum is actually larger for movements in the directions where movement speeds were highest.) If the wrist is free to move, the ellipse is modified such that the lowest inertia is for movements at right angles to the line of the hand (Hogan, 1985).
Using a different experimental paradigm, Kaminski and Gentile (1989) found that fast movements performed solely by the elbow were faster than movements of similar amplitude performed either with the shoulder alone or with both shoulder and elbow. Citing Hogan, they attributed this difference to decreased inertia when only the lower arm moves. In a study of two-joint movements in the absence of visual feedback, Ghez et al. (1990) found that variations in several kinematic parameters, including movement duration and peak velocity, show a directional dependence which correlates with these mobility ellipses. As in the present study, movements at right angles to the line of the lower arm have shorter durations and higher peak velocities. In neurological patients lacking proprioceptive feedback, the inertial anisotropy is poorly compensated, leading to large, systematic errors in movement direction and distance. Compensation is better in normal subjects but small, systematic errors remain. When visual feedback is available, as in the present study or in some of the Ghez experiments, errors in distance are small but the inertial anisotropy still causes variations in movement duration and speed. (A second anisotropic relationship, that of the stiffness of the arm, has a more complex form (Mussa-Ivaldi et al., 1985) and the ellipses of equal stiffness do not consistently align with the lower arm or with the differences in movement parameters found here and by Ghez et al. (1990).)
Thus, in the present experiments with hand and lower arm approxi- mately in line, movement speed is higher when less shoulder movement is required and the wrist can contribute to the movement - regardless of

J. Dean, M. Briiwer / Human Movement Science 14 (1995) 16.5-204 201
whether it actually does so or not - because the effective inertia for movement of the lower arm is less. As Hogan (1985) showed, the effective inertia is lower still and the corresponding ellipse aligned with the hand when the wrist is allowed to move, so one would expect wrist movement to be larger in faster movements if the control system takes advantage of this fact. Experiment 3 confirmed this hypothesis: the request to make rapid movements did result in significant increases in wrist movement overall and large increases for movements at right angles to the line of the lower arm. The fact that actual wrist movements typically exceed those specified by static cost functions also indicates that the control system takes advantage of the higher mobility of the wrist. In the context of obstacle avoidance, use of the wrist also results in shorter movement durations (Briiwer and Dean, 1992). This functional specialization is reminiscent of the micro-macro- manipulator (Egeland et al., 1988) or the distributed positioning concept (Potkonjak and Krstulovic, 1992) discussed in the robotics literature.
An analogous change in joint use occurs in rhythmic movements (Rosen- baum et al., 1991). When subjects were asked to perform rhythmic move- ments between specified end points using each of the arm joints alone, their subjective judgements of ease or comfort varied with frequency in a different way for the three joints. When they were allowed to use all three joints for a particular frequency, each was used in proportion to the subjective measure of comfort at that frequency. As in the present experi- ments, most subjects chose to incorporate more wrist motion as movement speed increased. Similar changes in joint contributions to single movements occur when trunk and arm combine to perform a pointing task (Rosen- baum and Krist, 1994).
Part of the dynamics of both simple and rhythmic movements concerns interaction torques at distal joints induced by movement at proximal joints. For example, accelerating flexion of the elbow will cause the wrist to extend and the hand to lag behind the movement of the lower arm; the magnitude of the effect will depend on the mass and inertia of the hand as well as the time course of elbow movement. Similarly, if the limb behaves like a system of passive springs, harmonic motion of the proximal joint will induce movement at the distal joints which varies in amplitude according to the relationship of the driving frequency to the resonant frequencies of the distal segments. However, these induced torques are not evident in the movements recorded here; the actual wrist movement, like that of the elbow, is towards the target and usually unidirectional. Thus, the control system must compensate for the interaction torques. For the initial phase

202 J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204
of movement, Koshland and Hasan (1994) have shown that much of the EMG activity reflects this compensation.
Factors other than mobility did not appear to be important. For exam- ple, Kots and Syrovegin (1966) reported that movements at two joints are more regular when the movements are congruent, that is, when both joints flex or both extend, than when one extends and the other flexes. In the present paradigm using test movements with a common initial position, directions of joint movements were not systematically dissociated, but differences in movement speed based on these patterns were not apparent. Neither did the direction of movements with high mobility - i.e., whether towards or away from the midline - affect movement duration or peak velocity.
In summary, the changes in wrist movement demonstrate that dynamic parameters, apparently linked to varying moments of inertia, influence the way movements are apportioned among joints when redundant degrees of freedom are present. Previous studies (Cruse, 1986; Cruse and Briiwer, 1987; Cruse et al., 1990) showed that static parameters which can be described by discomfort functions depending on joint angle influence the control of redunrl~nt degrees of freedom in posture and movement. Other investigators have shown that trajectory planning is affected by kinematic features of the path of the end-effector, such as jerk (Flash and Hogan, 1985). Both in avoiding obstacles and in the final approach to a target, humans also take advantage of the smaller moment of inertia at the wrist to make small, fast corrective movements (Briiwer and Dean, 1992; Dean and Briiwer, 1994a). Thus, the control of the redundant degrees of freedom represents a balance of static and dynamic influences which can be varied in accord with task demands.
Acknowledgements
We thank Professor H. Cruse, Professor H. Heuer and several anony- mous reviewers for helpful comments. This research was supported by grants from the Deutsche Forschungsgemeinschaft (De 418/1-l) and the Bundesministerium fur Forschung und Technologie.
References
Abend. W.. E. Bizzi and P. Morasso, 1982. Human arm trajectory formation. Brain 10.5, 331-348. Bernstein, N., 1967. The co-ordination and regulation of movements. Oxford: Pergamon Press.

J. Dean, M. Briiwer/Human Movement Science 14 (1995) 165-204 203
Briiwer, M. and J. Dean, 1992. ‘Control of human arm movements in two dimensions: A comparison of movements with 2 and 3 mobile joints’. In: N. Elsner and D.W. Richter (Eds.1, Proceedings of the 20th Gdttingen Neurobiology Conference (p. 138). Stuttgart: Thieme Verlag.
Cruse, H., 1986. Constraints for joint angle control of the human arm. Biological Cybernetics 54, 125-132.
Cruse, H. and M. Briiwer, 1987. The human arm as a redundant manipulator: the control of path and joint angles. Biological Cybernetics 57, 137-144.
Cruse, H., E. Wischmeyer, M. Briiwer, P. Brockfeld and A. Dress, 1990. On the cost functions for the control of the human arm movement. Biological Cybernetics 62, 519-528.
Cruse, H., M. Briiwer and J. Dean, 1993. The control of the movement of a 3-joint and a 4-joint redundant manipulator. Journal of Motor Behavior 25, 131-139.
Dean, J. and M. Briiwer, 1994a. Control of human arm movements in two dimensions: Paths and joint control in avoiding simple linear obstacles. Experimental Brain Research 97, 497-514.
Dean, J. and M. Briiwer, 1994b. ‘Effect of pointer length on arm movements in two dimensions’. In: N. Elsner and H. Breer (Eds.), Giittingen Neurobiology Report 1994. Proceedings of the 22th Gottingen Neurobiology Conference (p. 297). Stuttgart: Thieme Verlag.
Egeland, O., J.R. Sagli and B. Jansen, 1988. ‘Optimal continuous-path control for manipulators with redundant degrees of freedom’. In: U. Rembold (Ed.), Preprints of the IFAC-Symposium Robot Control 1988 (pp. 93.1-6). International Federation of Automatic Control.
Flanders, M. and J.F. Soechting, 1990. Parcellation of sensorimotor transformations for arm move- ments. Journal of Neuroscience 10, 2420-2427.
Flash, T., 1987. The control of hand equilibrium trajectories in multi-joint arm movements. Biological Cybernetics 57, 257-274.
Flash, T. and N. Hogan, 1985. The coordination of arm movements: an experimentally confirmed mathematical model. Journal of Neuroscience 5, 1688-1703.
Georgopoulos, A.P., 1986. On reaching. Annual Review of Neuroscience 9, 147-170. Ghez, C., J. Gordon, M.F. Ghilardi, C.N. Christakos and S.E. Cooper, 1990. Roles of proprioceptive
input in the programming of arm trajectories. Cold Spring Harbor Symposia on Quantitative Biology LV (pp. 837-847).
Hamming, R.W., 1977. Digital filters. Englewood Cliffs, NJ: Prentice-Hall. Hasan, Z., 1986. Optimized movement trajectories and joint stiffness in unperturbed, inertially loaded
movements. Biological Cybernetics 53, 373-382. Hogan, N., 1985. The mechanics of multi-joint posture and movement control. Biological Cybernetics
52, 315-331. Hogan, N., 1988. Planning and execution of multijoint movements. Canadian Journal of Physiology and
Pharmacology 66, 508-517. Hollerbach, J.M. and C.G. Atkeson, 1985. Deducing planning variables from experimental arm
trajectories: Pitfalls and possibilities. Biological Cybernetics 56, 279-292. Hollerbach, J.M. and K.C. Suh, 1985. ‘Redundancy resolution of manipulators through torque opti-
mization’. In: Proceedings of the 1985 IEEE International Conference on Robotics and Automation (pp. 1016-1021). Silver Spring: Computer Society Press.
Jeannerod, M. and R.G. Marteniuk, 1992. ‘Functional characteristics of prehension: From data to artificial neural networks’. In: L. Proteau and D. Elliott (Eds.), Vision and motor control (pp. 197-232). Amsterdam: Elsevier Science.
Kaminski, T.R. and A.M. Gentile, 1989. A kinematic comparison of single and multijoint pointing movements. Experimental Brain Research 78, 547-556.
Kawato, M., M. Isobe, Y. Maeda and R. Suzuki, 1988. Coordinates transformation and learning control for visually-guided voluntary movement with iteration: A Newton-like method in a function space. Biological Cybernetics 59, 161-177.
Kirkpatrick, S., C.D. Gelatt and M.P. Vecchi, 1983. Optimization by simulated annealing. Science 220. 671-680.

204 .I. Dean, M. Briiwer / Human Movement Science 14 (1995) 165-204
Koshland, G.F. and 2. Hasan, 1994. Selection of muscles for initiation of planar, 3-joint arm movements with different final orientations of the hand. Experimental Brain Research 98, 157-162.
Kots, Y.M. and A.V. Syrovegin, 1966. Fixed set of variants of interactions of the muscles of two joints in the execution of simple voluntary movements. Biophysics 11, 1212-1219.
Lacquaniti, F. and J.F. Soechting, 1982. Coordination of arm and wrist motion during a reaching task. Journal of Neuroscience 2, 399-408.
Lacquaniti. F., G. Ferrigno, A. Pedotti, J.F. Soechting and C.A. Terzuolo, 1987. Changes in spatial scale in drawing and handwriting: kinematic contributions by proximal and distal joints. Journal of Neuroscience 7, 819-828.
Morasso, P.. 1981. Spatial control of arm movements. Experimental Brain Research 42, 223-227. Mussa-Ivaldi, F.A., N. Hogan and E. Bizzi, 1985. Neural, mechanical, and geometric factors subserving
arm posture in humans. Journal of Neuroscience 5, 2732-2743. Nelson, W.L., 1983. Physical principles for economies of skilled movements. Biological Cybernetics 46,
135-147. Potkonjak, V. and A. Krstulovic, 1992. Mathematical modelling of a redundant anthropomorphic arm
(Part Il. Robotics and Autonomous Systems 9, 165-170. Rosenbaum, D.A. and H. Krist. 1994. ‘Antecedents of action’. In: H. Heuer and S.W. Keele (Eds.),
Handbook of motor control. New York: Academic Press. Rosenbaum, D.A., J.D. Slotta, J. Vaughan and R.J. Plamondon, 1991. Optimal movement selection.
Psychonomic Science 2, 86-91. Soechting, J.F., 1984. Effect of target size on spatial and temporal characteristics of a pointing
movement in man. Experimental Brain Research 54, 121-132. Uno, Y., M. Kawato and R. Suzuki, 1989. Formation and control of optimal trajectory in human
multijoint arm movement. Biological Cybernetics 61, 89-101. Yoshikawa, T., 1984. ‘Analysis and control of robot manipulators with redundancy’. In: M. Brady and
R. Paul (Eds.), Robotics research. The First International Symposium (pp. 735-747). Cambridge, MA: MIT Press.







![Assessing Wrist Movement With Robotic Devices · 2019. 12. 14. · movements have been observed to be less smooth and more variable than pointing movements of elbow and shoulder [32].](https://static.fdocuments.in/doc/165x107/5fbcfa90d2a7a747432f6a24/assessing-wrist-movement-with-robotic-devices-2019-12-14-movements-have-been.jpg)