Control of a Parallel Hybrid Drivetrain: A Flatness Based ... · Control of a Parallel Hybrid...
6
Control of a Parallel Hybrid Drivetrain: A Flatness Based Approach ? R. Gasper * F. Hesseler ** D. Abel *** * (e-mail: [email protected]), ** (e-mail: [email protected]), *** (e-mail: [email protected]), Institute of Automatic Control, RWTH Aachen University, Aachen, 52064 Germany. Abstract: Despite the advantage of a hybrid electric vehicle (HEV) to save fuel and minimize exhaust emissions, the drivability of an HEV is very important. Due to the electric machine in the drivetrain of a parallel HEV, it is possible to realize gear shifts without an intermission in the wheel torque, and therefore the drivability of the vehicle can be increased. Also, the start of the internal combustion engine during the electrical driving is a very critical task for the drivability of a parallel HEV. In this paper, a flatness based feedforward control and optimization for the drivetrain of a parallel HEV with an automated manual transmission and a dry clutch is described. 1. INTRODUCTION The main advantage of a hybrid electrical vehicle (HEV) is fuel saving and the minimization of exhaust emissions. Despite this, the requirements on the drivability of vehicles are increasing. In this paper, a feedforward control for the drivetrain of a parallel HEV (pHEV) is described. The in- ternal combustion engine (ICE) and the electrical machine (EM) are coupled parallely with the gearbox. Therefore, a pHEV allows pure electrical as well as conventional driving with the ICE. Due to the EM in the drivetrain, gear shifts without an intermission in the wheel torque can be realized, and hence the drivability is increased. Also, the start of the ICE, which is realized using the EM, is important for the drivability. Different approaches to solve the drivetrain control prob- lem exist. For example, in [1] a model predictive controller was developed to control the drivetrain of HEV during gear shifting and cranking of the ICE. In [7], a control structure with four PI-Controller and a simple feedforward control for the drivetrain of a conventional vehicle with a dry clutch was developed. In [3], a model predictive control for the drivetrain of a conventional vehicle was developed. A flatness based control and a cascaded con- trol were developed in [4] to control the drivetrain of a conventional car with dry clutch. The feedforward control for the launch clutch of a pHEV was described in [2]. In the paper at hand, the feedfoward control and the trajectory generation, presented in [2], are enhanced to control the drivetrain in every situation which can occure during the gear shifts. In comparision to [2], the torque dynamics are considered in the feedforward control. Also, the flatness of the drivetrain is used for the optimization during the synchronization of the angular velocities of the ICE and the gearbox. ? The authors gratefully acknowledge the BMWi - Federal Ministry of Economics and Technology for the financial support in the project ”Innovative Hybrid Passenger Car Drive for Europe”. Fig. 1. Drivetrain of a pHEV The drivetrain is equipped with a dual mass fly wheel (DMF). The DMF can cause high oscillations during the cranking of the ICE because the eigenfrequency of the DMF is less than the idle speed of the ICE. Simulation results are discussed in the final part of the contribution. 2. DRIVETRAIN MODEL A simple mechanical model of the drivetrain of the pHEV is shown in Fig. 1. The drivetrain consists of the ICE with a DMF, an EM, a gear box, and the vehicle. The inertia of the ICE J 1 is connected with the inertia of the DMF J 2 by a spring damper system, where the spring constant is denoted with k 1 and the damping constant is d 1 . The inertia of the DMF is coupled with the inertia of the gear box J 4 through the clutch and a gear ratio g 1 . The inertia of the EM J 3 is assumed to be coupled stiff with the inertia of the gear box J 4 , which in its turn is coupled with the inertia of the vehicle J 5 through the axle shafts. The axle shafts are modelled as a spring damper system with the spring constant k 2 and the damping constant d 2 . The dynamics of the system can be described by four momentum equilibriums. The first two momentum equi- libriums describe the dynamics of the ICE and the DMF. The second two describe the dynamics of the gear box with Preprints of the 18th IFAC World Congress Milano (Italy) August 28 - September 2, 2011 Copyright by the International Federation of Automatic Control (IFAC) 2943
Transcript of Control of a Parallel Hybrid Drivetrain: A Flatness Based ... · Control of a Parallel Hybrid...

Control of a Parallel Hybrid Drivetrain: AFlatness Based Approach ?
R. Gasper ∗ F. Hesseler ∗∗ D. Abel ∗∗∗
∗ (e-mail: [email protected]),∗∗ (e-mail: [email protected]),∗∗∗ (e-mail: [email protected]),
Institute of Automatic Control, RWTH Aachen University, Aachen,52064 Germany.
Abstract: Despite the advantage of a hybrid electric vehicle (HEV) to save fuel and minimizeexhaust emissions, the drivability of an HEV is very important. Due to the electric machine inthe drivetrain of a parallel HEV, it is possible to realize gear shifts without an intermission inthe wheel torque, and therefore the drivability of the vehicle can be increased. Also, the startof the internal combustion engine during the electrical driving is a very critical task for thedrivability of a parallel HEV.In this paper, a flatness based feedforward control and optimization for the drivetrain of aparallel HEV with an automated manual transmission and a dry clutch is described.
1. INTRODUCTION
The main advantage of a hybrid electrical vehicle (HEV)is fuel saving and the minimization of exhaust emissions.Despite this, the requirements on the drivability of vehiclesare increasing. In this paper, a feedforward control for thedrivetrain of a parallel HEV (pHEV) is described. The in-ternal combustion engine (ICE) and the electrical machine(EM) are coupled parallely with the gearbox. Therefore, apHEV allows pure electrical as well as conventional drivingwith the ICE. Due to the EM in the drivetrain, gearshifts without an intermission in the wheel torque canbe realized, and hence the drivability is increased. Also,the start of the ICE, which is realized using the EM, isimportant for the drivability.Different approaches to solve the drivetrain control prob-lem exist. For example, in [1] a model predictive controllerwas developed to control the drivetrain of HEV duringgear shifting and cranking of the ICE. In [7], a controlstructure with four PI-Controller and a simple feedforwardcontrol for the drivetrain of a conventional vehicle witha dry clutch was developed. In [3], a model predictivecontrol for the drivetrain of a conventional vehicle wasdeveloped. A flatness based control and a cascaded con-trol were developed in [4] to control the drivetrain of aconventional car with dry clutch. The feedforward controlfor the launch clutch of a pHEV was described in [2]. In thepaper at hand, the feedfoward control and the trajectorygeneration, presented in [2], are enhanced to control thedrivetrain in every situation which can occure during thegear shifts. In comparision to [2], the torque dynamics areconsidered in the feedforward control. Also, the flatnessof the drivetrain is used for the optimization during thesynchronization of the angular velocities of the ICE andthe gearbox.
? The authors gratefully acknowledge the BMWi - Federal Ministryof Economics and Technology for the financial support in the project”Innovative Hybrid Passenger Car Drive for Europe”.
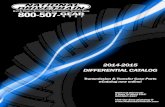
Fig. 1. Drivetrain of a pHEV
The drivetrain is equipped with a dual mass fly wheel(DMF). The DMF can cause high oscillations during thecranking of the ICE because the eigenfrequency of theDMF is less than the idle speed of the ICE. Simulationresults are discussed in the final part of the contribution.
2. DRIVETRAIN MODEL
A simple mechanical model of the drivetrain of the pHEVis shown in Fig. 1. The drivetrain consists of the ICE witha DMF, an EM, a gear box, and the vehicle. The inertiaof the ICE J1 is connected with the inertia of the DMFJ2 by a spring damper system, where the spring constantis denoted with k1 and the damping constant is d1. Theinertia of the DMF is coupled with the inertia of the gearbox J4 through the clutch and a gear ratio g1. The inertiaof the EM J3 is assumed to be coupled stiff with the inertiaof the gear box J4, which in its turn is coupled with theinertia of the vehicle J5 through the axle shafts. The axleshafts are modelled as a spring damper system with thespring constant k2 and the damping constant d2.The dynamics of the system can be described by fourmomentum equilibriums. The first two momentum equi-libriums describe the dynamics of the ICE and the DMF.The second two describe the dynamics of the gear box with
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
Copyright by theInternational Federation of Automatic Control (IFAC)
2943

FN
scl
FN
max
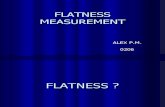
Fig. 2. normal force of the clutch depending on the positionof the clutch actuator
the EM and the vehicle. The four differential equationsyield the following state space model for the drivetrain ofa pHEV:
x1x2x3x4x5x6
=
0 1 −1 0 0 0
−k1
J1−d1
J1
d1
J10 0 0
k1
J2
d1
J2−d1
J20 0 0
0 0 0 0 1 −1
0 0 0 −k2
J6−d2
J6
d2
J6
0 0 0k2
J5
d2
J5−d2
J5
x1x2x3x4x5x6
+
0 0 0 0
0 01
J10
−1
J20 0 0
0 0 0 0g1
J6
g2
J60 0
0 0 0 −1
J5
Mcl
MEM
MICE
Mv
(1)
y =[x2 x6
]T(2)
with the abbreviation J6 = J3g22 + J4. The state x1 is the
difference between the angles of the ICE and the DMF.The states x2 and x3 equal the angular velocity of theICE and the angular velocity of the DMF, respectively.The state x4 is the difference between the angles of thegear box and the vehicle. The angular velocity of thegearbox output is given by the state x5, and the angularvelocity of the wheel is x6. Tire slip is neglected, thereforethe velocity of the vehicle v can be calculated with theradius r multiplied by the angular velocity of the wheel,v = x6 r. The output y consists of the ICE angular velocityx2, and the vehicle angular velocity x6. The resultingresistance torque Mv affecting the vehicle includes air dragand rolling resistance. It can be expressed by the followingequation
Mv =%
2cwAr
3x26 + frmgr, (3)
where cw is the drag coefficient, the frontal area is A, andthe mass of the vehicle is m. r is the radius of the tire, fris the rolling resistance coefficient, and % is the air density.MEM is the torque of the EM, and Mcl represents theclutch torque which can be calculated using the followingequation
Mcl = FN (scl)frclRclsign (x3 − g1x5) , (4)
where Rcl is the effective radius and frcl is the friction co-efficient of the dry clutch. frcl depends on the temperature
and varies according to clutch wear. Therefore, frcl variesduring the slipping of the clutch and decreases during theclutch life time. The sign of the clutch torque is equalto the sign of the relative angular velocity between thegearbox input and the DMF. The normal force FN of theclutch depends on the position of the clutch actuator s andthe nonlinear characteristic curve of the clutch cushiondeflection (cf. Figure 2). Note that there exists differentways to model the clutch torque Mcl (see for an overview[5]). MICE is the torque of the ICE, for which two caseshave to be considered. If the ICE is turned off, MICE
equals the ICE drag torque, which can be approximatedby an affine function of the ICE angular speed x2
MICE = −hx2 −MICE0, (5)
where MICE0 is the breakaway torque and h the slope ofthe affine function. If the ICE is on, MICE is an additionalinput of the system. The torque dynamics of the ICE canbe approximated with a differential equation of first order
MICE = −1
TICE
(MICE −Mreq
ICE
), (6)
where TICE is the time constant and MreqICE is the re-
quested ICE torque. The time constant TICE is reciprocalto angular velocity of the ICE and can vary between 200and 400 msec. [16].The state space model (1) is nonlinear due to the nonlinearbehaviour of the clutch torque and the resistance torque.Furthermore, the number of inputs varies depending onthe state of the ICE. If the ICE is turned off, the inputsare the position of the clutch actuator scl and the torqueMEM of the EM. If the ICE is turned on, the torque Mreq
ICEis a further input.
3. FEEDFORWARD CONTROL OF THEDRIVETRAIN
In this section, the feedforward control for the drivetrainis presented. First, a short introduction to flatness basedcontrol is given. After that, the connection of flatness tooptimization is described. Then, a simplified model of thedrivetrain is derived, which can be inverted to obtain afeedforward control.
3.1 Flatness based control
Flatness is a property of a control system which is usefulfor the trajectory planning task of the open loop control.The states and inputs of a flat system can be expressedin terms of the flat outputs and a finite number of theirderivatives without solving differential equations (see [9]).The design of a feedforward control is very simple if the flatoutputs correspond to the physical outputs of the system.More precisely, if the system has states x and inputs u,then the system is flat if outputs y of the form [8]
y = Φ
(x, u, u, u, . . . ,
(γ)u
)(7)
can be found with dim (y) = dim (u), such that the statesx and the inputs u can be expressed as a function of the flatoutputs y and a finite number of their time derivations:
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
2944

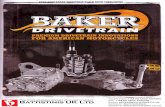
Fig. 3. Simplified drivetrain model of a pHEV
x = Θ
(y, y, y, . . . ,
(β)y
), (8)
u = Ξ
(y, y, y, . . . ,
(β+1)y
). (9)
If the system is flat, the inputs can be calculated withrespect to the desired outputs, which guarantee that theoutputs follow the desired behaviour. The desired tra-jectories for the outputs y have to be functions whichare sufficiently often differentiable to guarantee that thetrajectories of the inputs and outputs are smooth. Flatnessis an indication that the nonlinear structure of the systemis well characterized, and the structure can be exploitedin designing control algorithms for motion planning, tra-jectory generation and stabilization [8]. New results fornecessary and sufficient conditions for flat systems can befound in [6].
3.2 Flatness and optimization
The property of flatness can be usefull for the optimiza-tion. If a system is flat, the minimization of a cost func-tion can be simplified because the trajectories for the flatoutputs, which minimize the cost function, satisfy the dy-namic constraints [8]. Therefore, the dynamic constraintshave not to be considered in the cost function and thereforeno Lagrange multiplier is needed. Thus, these constraintsneed not to be integrated [14]. Due to the flatness, thestates and inputs in a cost function can be expressedwith the equations (8, 9). The optimization problem istransformed into an optimization problem of higher order[10]
J =
tf∫0
L(y, y, y, . . . ,(p)y )dt. (10)
where L is the Lagrangian and p ≤ β + 1. The necessaryconditions for a minimum of (10) are [10]
0 =∂L
∂yi−
d
dt
∂L
∂yi+ · · · + (−1)p
dp
dtp∂L
∂(p)y i
(11)
with i = 1, · · · ,m. For a more detailed description, theinterested reader is referred to [10, 13, 14]. Also, the flat-ness based optimization can be used for model predictivecontrol (see [15]).
3.3 Feedforward control of the drivetrain of a pHEV
The state space model given in equation (1) can be sim-plified to obtain a feedforward control for the drivetrain.It is assumed that the coupling between the vehicle andthe gearbox through the axle shafts is stiff. Therefore,the spring damper element is neglected. Thus, the angularvelocities of the vehicle and the gearbox output are equal,x5 = x6. Moreover, it is assumed that the ICE and DMFare coupled stiffly, hence the angular velocities of the ICEand DMF are equal, x2 = x3. A further simplificationcan be done by assuming that the requested driver torqueMD is equal to the sum of the vehicle resistances andthe vehicle inertia. Therefore, the vehicle model can bereplaced by the requested driver torque. The simplifieddrivetrain model is shown in Fig. 3. These assumptionslead to the following state space model for the simplifieddrivetrain model if the ICE is turned off
[x2x6
]=
1
J70
0 −1
J6
[MICE
MD
]
+
−1
J70
g1
J6
g2
J6
[ Mcl
MEM
], (12)
with the abbreviation J7 = J1 + J2.If the ICE is on, the simplified drivetrain model is
[MICE
x2x6
]=
−
1
TICE0
1
J70
0 −1
J6
[MICE
MD
]
+
1
TICE0 0
0 −1
J70
0g1
J6
g2
J6
[MreqICEMcl
MEM
], (13)
The simplified state space models (12,13) can be invertedto obtain the torques of the EM and the clutch and, if theICE is on, the requested ICE torque.If the ICE is off, the inversion yields
[Mcl
MEM
]=
[−J7 0g1
g2J7
J6
g2
][x2x6
]−
[1 0g1
g2−
1
g2
][MICE
MD
]. (14)
If the ICE is cranked, the torque of the ICE depends on theICE angular velocity x2. Thus, it can be concluded thatthe inputs are functions of the output y = [x2, x6]T , andits first time derivation. Therefore, the simplified system(12) of the drivetrain is flat with the angular velocities ofthe vehicle and the ICE as flat outputs.In case the ICE is turned on, the requested ICE torqueis an additional input of the system and therefore thefeedforward control is
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
2945

[MreqICEMcl
MEM
]=
TICE 0 00 −J7 0
0g1J7
g2
J6
g2
[ MICE
x2x6
]
+
1 01 0
−g1
g2
1
g2
[MICE
MD.
], (15)
Considering (15), the requested ICE torque, the clutchtorque and the EM torque can be calculated with thetrajectories for the ICE torque, the angular velocities ofthe vehicle and the ICE and their first derivation withrespect to the time. Therefore, the flat output is y =[MICE , x2, x6] of the simplified system (13) if the ICE ison. To use the feedforward control (15), the trajectory forMICE has to be known. To find a solution, an optimizationproblem is formulated and solved to obtain the torque andangular velocity of the ICE.Note that in both cases the torque MD is a function of thevehicle angular velocity x6 and vice versa. The positionof the hydraulic clutch actuator can be calculated withequation (4) and the inverse of the characteristic curve ofthe normal force of the clutch, shown in Figure 2.
4. TRAJECTORY GENERATION
In this section, the desired vehicle angular velocity trajec-tory is calculated, and the optimization problem for thesynchronization of the angular velocities to close the clutchis solved.
4.1 Angular velocity trajectory of the vehicle
The desired driver torque MD is determined throughthe position of the acceleration and brake pedal andtransmitted to the drivetrain control. To obtain the desiredvehicle velocity trajectory, the longitudinal dynamics ofthe vehicle are considered. These can be described by thefollowing equation
MD = J5x6 +%cwAr3
2x26 + frmgr, (16)
where MD is assumed to be constant during the synchro-nization and the start of the ICE. Therefore, the equation(16) is a quadratic ODE and can be transformed to theform
x6 = (−1) ·(αx26 + β
)(17)
with the abbreviations α = ρcwAr3
2J5, and
β = 1J5
(frmg r −MD). For β > 0, the desired drivertorque is less than the friction torque, MD < frmg r. Inthis case, the solution for the angular velocity trajectoryof the vehicle is [12]
x6 =
√β
αtan
(√β α (−t+ C)
). (18)
If the driver torque exceeds the friction torque, MD >frmg r, then β < 0 follows, and the solution of the ODEis [12]
x6 =
√−β
αtanh
(√−αβ (t+ C)
)(19)
In the third case, the desired driver torque equals thefriction torque, MD = frmgr, or β = 0. The quadraticODE (16) is simplified to x6 = −αx26, with the solution
x6 =1
α (t+ C). (20)
C is in all three cases the integral constant and has to bechosen according to the initial condition. Note that thebraking is considered by the case β > 0 and MD < 0.
4.2 Angular velocity and torque trajectory of the ICE
Two different cases have to be considered to obtain thedesired angular velocity and torque trajectories for theICE. The first case is the start of the ICE and only theICE angular velocity has to be calculated because MICE
is a function of x2. The second case is the synchronizationof the gearbox input and ICE angular velocities to closethe clutch and the angular velocity as well as the torquetrajectories of the ICE have to be calculated.
Start of the ICE During the cranking of the ICE, MICE
is a function of the ICE angular velocity. Therefore, atrajectory for the ICE angular velocity is needed, whichis differentiable sufficiently often and connects two steadystates. If equation (14) is considered for the feedforwardcontrol, it can be concluded that the trajectory has to beonce differentiable. These requirements are fulfilled by thefollowing function taken from [11]
y(t) =
y(0) if t ≤ 0
y(0) + (y(T ) − y(0)) ξ
(t
T
)if 0 < t < T
y(T ) if T ≤ t
(21)
where y(T) is the final and y(0) is the start value of thetrajectory, T is the duration of the transition. The functionξ(t) is
ξ(t) =
∫ t0τn (1 − τ)n dt∫ T
0τn (1 − τ)n dt
, (22)
where n determines the possible grade of differentiation.The function ξ(t) describes the transition between theinitial and end value.Also, function (21) is used to describe the requested ICEtorque Mreq
ICE during the opening of the clutch.
Synchronization of the angular velocities In order toobtain the torque and angular velocity trajectories for thefeedforward control, if the ICE is on, the following costfunction is defined
J =
T∫0
(k1(MreqICE
)2+ k2M
2cl + (g1x6(t) − x1(t))2
)dt (23)
with the constraints
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
2946

0 10 20 30 40 50 60 70-10
0
10
20
30
40
50
60
70
80
t [sec.]
v [k
m/h
]
vehicle velocity
vact
vdes
Fig. 4. vehicle velocity, overview
x2(t) =1
J7(MICE −Mcl) , (24)
g1x6(T ) = x2(T ), (25)
g1x6(T ) = x2(T ). (26)
The cost function (23) contains the square of the differencebetween the two angular velocities of the ICE and thevehicle multiplied by the gear ratio g1. Also, equation (23)contains the squares of the two torques Mcl and Mreq
ICE ,which are weighted with the factors k1 and k2 to adjustthe torque distribution. The first constraint is the equationof motion of the ICE. The second and third constraints(25, 26) guarantee that the two angular velocities andaccelerations are equal at the end of the synchronization,which allows for the clutch to be closed without jerk.The flat outputs of the system are the vehicle velocityy3 = x6, the angular velocity y2 = x2 and the torquey1 = MICE of the ICE. Thus, the Lagrangian of theoptimiziation problem is
L = k1(MreqICE
)2+ k1M
2cl + (g1y3(t) − y2(t))2 (27)
As mentioned before, in case of a flat system, the dynamicconstraints can be neglected and therefore no Lagrangemultiplier is needed. The Lagrangian (27) must dependonly on the flat outputs and their time derivations. There-fore, the clutch torque Mcl has to be substituted in theLagrangian (27) with the ICE torque equilibrium
Mcl = y1 − J7y2. (28)
Also, the requested torque MreqICE has to be substituted
with the ICE torque dynamics (6). These yields to thefollowing Lagrangian
L = k1 (TICE y1 + y1)2 + k1 (y1 − J7y2)2 +
(g1y3(t) − y2(t))2 , (29)
which depends only on the flat outputs. The trajectory ofthe first flat output y1 is determined by the desired drivertorque and can not be used to minimize the cost function.Therefore, the necessary conditions for a minimum are
∂L
∂y2−
d
dt
∂L
∂y2= −2 (g1y3 − y2) +
2J7k2 (y1 − J7y2) = 0, (30)
∂L
∂y1−
d
dt
∂L
∂y1= 2k1 (TICE y1 + y1) + 2k2 (y1 − J7y2) −
2k1TICE (TICE y1 + y1) = 0. (31)
0 10 20 30 40 50 60 700
500
1000
1500
2000
2500
3000
3500
4000
t [sec.]
n [1
/min
.]
engine and clutch rpm
nice
act
nice
des
ncl
act
Fig. 5. engine and clutch rpm, overview
The equations (30, ¡31) form a linear differential equationsystem, which can be solved with known methods [12]. Thesolutions have to consider the initial conditions y1(0) =MICE(0), y2(0) = x2(0) and the final conditions (25, 26).
5. SIMULATION
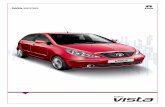
A complete pHEV has been modelled in Matlab/Simulink(The MathWorksTM) to test the Hybrid Control Unit(HCU) in simulations. The presented feedforward controlhas been implemented in the HCU. The model of thepHEV is complex, and its complete description is beyondthe scope of this paper. The important part is the driv-etrain, which is modelled with the SimDriveline Toolbox.The drivetrain model given in equation (1) is enhancedwith the dynamics of the ICE, the EM and the clutch ac-tuator. Besides the feedforward control, a feedback controlstructure is implemented to compensate for disturbancesand model uncertainties. The control structure consists of2 PID controllers to control the ICE and vehicle speed, themanipulated variables are the clutch and EM torque. Thegains of the PID controllers are scheduled depending onthe gear ratios and situations (ICE start, clutch openingand synchronisation).The simulation consists of an acceleration from 0 to 70kmh in 20 sec., driving 20 sec. with constant velocity and
braking until coming to a complete stop (cf. Fig. 4). Thecorresponding ICE and gearbox speed are shown in Fig.5. The ICE is started at second 17. After that, gearshiftsat the seconds 25, 60 and 65 follow. If the vehicle speed istoo low, the clutch is hold open to avoid a stall of the ICE.The ICE start and the first gearshift at the 25th secondare considered more in detail. The speed of the ICE andthe clutch are shown in Fig. 6. The vehicle velocity andthe clutch position during the start are depicted in Fig. 7.The ICE is cranked until the desired speed for the enginestart (1000 rpm) is reached. Note, that the eigenfrequencyof the DMF (≈ 500 rpm) is not excited, see Fig. 6. Forthe start of the ICE, the clutch is opened again to avoidoscillation in the drivetrain. After that the synchronisationof the angular velocities of the clutch and the ICE follows.The speed of the ICE and the clutch during the gearshift atsecond 25 are shown in Fig. 8. The corresponding vehiclevelocity and clutch position are depicted in Fig. 9. Thespeed of the clutch and the ICE are equal at the end of thesynchronisation, and the clutch can be closed completely.During the gearshift, the vehicle does not deacceleratewhich yields a good driveability.The friction coefficient varies during driving. To considerthis effect, the friction coefficient is varied. In the simula-tion model, the friction coefficient is set to half and twice
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
2947

17 17.2 17.4 17.6 17.8 180
200
400
600
800
1000
1200
1400
1600
1800engine and clutch rpm
t [sec.]
n [1
/min
.] nice
act
nice
des
ncl
act
nice
act2*f
rcl
ncl
act2*f
rcl
nice
act1/2*f
rcl
ncl
act1/2*f
rcl
Fig. 6. ICE and gearbox revolutions/minute (rpm), startICE
17 17.2 17.4 17.6 17.8 1822
23
24
25
26
t [sec.]
v [k
m/h
]
vehicle velocity
17 17.2 17.4 17.6 17.8 180
0.005
0.01
0.015
t [sec.]
s cl[m
]
clutch position
vact
vact
2*frcl
vact
1/2*frcl
scl
scl
2*frcl
scl
1/2*frcl
Fig. 7. vehicle velocity and clutch position, start ICE
25.2 25.3 25.4 25.5 25.6 25.7 25.8 25.92200
2400
2600
2800
3000
3200
3400
3600
3800engine and clutch rpm
t [sec.]
n [1
/min
.]
nice
act
nice
des
ncl
act
nice
act2*f
rcl
ncl
act2*f
rcl
nice
act1/2*f
rcl
ncl
act1/2*f
rcl
Fig. 8. ICE and gearbox angular velocity during gearshift
25.2 25.3 25.4 25.5 25.6 25.7 25.8 25.954
56
58
60
t [sec.]
v [m
/s]
vehicle velocity
25.2 25.3 25.4 25.5 25.6 25.7 25.8 25.90
0.005
0.01
0.015
t [sec.]
s cl[m
]
clutch position
vact
vact
2*frcl
vact
1/2*frcl
scl
scl
2*frcl
scl
1/2*frcl
Fig. 9. vehicle velocity and clutch position, gearshift
the nominal value in the control. The results are shown inFigs. 6, 7, 8 and 9. If the friction coefficient is twice thenominal value, the vehicle is more accelerated because theICE is more deaccelered. The clutch position is less than inthe nominal case, because the clutch has to be less closedto transmit the desired torque. If the friction coefficientis half the nominal value, the vehicle acceleration is lessthan in the nominal case and the ICE is more accelerated.The clutch has to be further closed to transmit the desiredtorque. In both cases, the influences on the vehicle velocityare very small.
6. CONCLUSION
In this contribution, a flatness based feedforward controlto control the drivetrain of a pHEV is presented. Also,in the optimization the property of flatness is used tocalculate the ICE torque and angular velocity during thesynchronization of the ICE and the clutch. The feedfor-ward control was augmented with a feedback control andit could be shown that the control structure is robust ifthe friction coefficient varies.
REFERENCES
[1] R. Beck, D. Abel and S. Saenger. Model PredictiveControl of a Parallel Hybrid Drivetrain. In Proceed-ings of the 4th Decision and Control, and the ECC2005. Seville, Spain, 2005.
[2] R. Gasper, R. Beck, P. Drews and D. Abel. Feed-forward control of the launch clutch for a parallelHybrid. In Proceedings of the ECC 2009. Budapest,Hungary, 2009.
[3] A. Bemporat, F. Borrelli, L. Glielmo and F. Vasca.Hybrid Control of of dry clutch engagement. InProceedings of the ECC 2001. Porto, Portugal, 2001.
[4] J. Levine and B. Remond. Flatness based control ofan automatic clutch. In Proceedings of the MTNS-2000. Perpignan, France, 2000.
[5] R. Amari, P. Tona und M. Alamir. A phenomeno-logical model for torque transmissibility during dryclutch engagement. In Proc. IEEE Int. Conference onControl Applications. Saint Petersburg, Russia, 2009.
[6] J. Levine. Analysis and Control of Nonlinear Systems.Springer, 2009.
[7] L. Glielmo, L. Iannelli, V. Vacca and F. Vasca.Gearshift Control for Automated Manual Transmis-sions. In IEEE/ASME Trans. on Mechatronics, Vol.11, No. 1, 2009, pp. 17 - 26.
[8] Ph. Martin, R.M. Murray, P. Rouchon and G. BastinFlat Systems. In ECC, 1997, page 211-264. Gevers,M., Brussels/Belgium.
[9] M. Fliess, J. Levine, Ph. Martin and P. Rouchon.Flatness and defect of nonlinear systems: Introduc-tory theory and examples. In Int. J. of Control. 61,1995, page 1327-1361.
[10] H. Sira-Ramirez and S. Agrawal. Differential FlatSystems Marcel Dekker, 2004.
[11] J. von Loewis. Flachheitsbasierte Trajektorienfol-geregelung elektromechanischer Systeme Ph.D. thesis,TU Dresden, Dresden, Germany, 2002.
[12] I.N. Bronstein and K.A. Semendyayev. Handbook ofMathematics Springer, 2007.
[13] I. M. Gelfand, S. V. Fomin. Calculus of Variations.Dover Pubn Inc, 2003.
[14] J. Oldenburg, W. Marquardt Flatness and HigherOrder Differential Model Representation in DynamicOptimization. Lehrstuhl fuer Prozesstechnik, RWTHAachen, 2001.
[15] R. Mahadevan, S. K. Agrawal, F. J. Doyle III. Differ-ential flatness based nonlinear predictive control offed-batch bioreactors. Control Engineering Practice9, 2001, pages 889 - 899.
[16] E. Hendricks, S. C. Sorenson: Mean Value Mdoellingof Spark Ignition Engines. SAE, Paper Nr. 900616,1990.
Preprints of the 18th IFAC World CongressMilano (Italy) August 28 - September 2, 2011
2948