Control Engineering Practice - Baylor...
12
Hierarchical optimization of boiler–turbine unit using fuzzy stable model predictive control Xiao Wu a,n , Jiong Shen a,n , Yiguo Li a , Kwang Y. Lee b a Key Laboratory of Energy Thermal Conversion and Control of Ministry of Education, School of Energy and Environment, Southeast University, Sipailou #2, Nanjing 210096, China b Department of Electrical and Computer Engineering, Baylor University, One Bear Place #97356, Waco, TX 76798-7356, USA article info Article history: Received 28 December 2012 Accepted 10 March 2014 Available online 13 April 2014 Keywords: Boiler–turbine unit Optimal reference governor Stable model predictive control Takagi–Sugeno fuzzy disturbance model Fuzzy Lyapunov function Slack and collection matrices abstract This paper develops a hierarchical control system structure based on the Takagi–Sugeno fuzzy model to achieve an optimal control of a boiler–turbine unit. In the upper layer of the hierarchy, an optimal reference governor is designed to find the optimal operating point. A disturbance term is introduced to the fuzzy model to lump the modeling mismatch and unknown disturbance. Thus, the effect of plant behavior variation can be removed and the operating point found can be feasible to control. In the lower layer, a stable model predictive controller is developed to track the optimal set-points while guarantee- ing the input-to-state stability of the system. Fuzzy Lyapunov function and appropriate slack and collection matrices are used to reduce the conservatism of stability design and improve the performance. Through the estimation of the disturbance term using an observer, the two layers in the hierarchy are coupled and the integrated system can realize a dynamic optimal control of the boiler–turbine unit, even in the case of severe plant behavior variations. & 2014 Elsevier Ltd. All rights reserved. 1. Introduction Boiler–turbine unit is the most important system in a fossil- fuel-fired power plant which is used to convert chemical energy in fuel into mechanical and then into electrical energy. For a typical boiler–turbine unit, the primary task is to regulate the power output to meet the demand of the grid, while maintaining the drum pressure, steam temperature and water level within given tolerances to keep the power plant operating in a safe mode. However, due to the energy shortage and environmental concern worldwide as well as competition among utilities and other society driven forces, more stringent requirements, such as minimization of fuel consumption, maximization of duty life and minimization of pollution, etc., have to be fulfilled by the power plant to achieve an optimal operation. A most effective and direct way to solve this problem is using an optimal control strategy, in which not only the conventional dynamic control performance, but also aforementioned multiple objectives need to be considered. Supervisory control is a typical way to realize the optimal control, in which a hierarchical structure with optimization in the upper layer and control in the lower layer is usually adopted (Qin & Badgwell, 2003). Garduno-Ramirez and Lee (2001) pre- sented the concept of optimal reference governor (ORG), where a steady-state nonlinear model of the boiler–turbine unit is used in a multi-objective optimization to provide the optimal operation points for the PID controllers, which then drive the plant to track these points. In Heo, Lee and Garduno-Ramirez (2006) and Heo and Lee (2008), steady-state neural network model is used instead of the nonlinear mathematical boiler–turbine model and an intelligent algorithm is adopted for the ORG to calculate the optimal set-points. Although these optimal control strategies show greater improvement in operation, they generally have the follow- ing problems: 1. The effectiveness of the set-point optimization is greatly rely- ing on the accuracy of the steady-state model, which brings a heavy burden on modeling. Moreover, since the characteristics of power plant are protean due to the equipment wear, environment change and fuel variation, when an unknown disturbance or change in plant behavior occurs, the optimiza- tion cannot remove their effects and maintain the optimality anymore, and the operating points found may not be in steady- state or feasible. Although the use of an adaptive static model in the optimiza- tion layer is a good way to deal with this problem (Heo & Lee, 2008), both the model update and nonlinear optimization are time consuming, which means the optimization in the upper Contents lists available at ScienceDirect journal homepage: www.elsevier.com/locate/conengprac Control Engineering Practice http://dx.doi.org/10.1016/j.conengprac.2014.03.004 0967-0661/& 2014 Elsevier Ltd. All rights reserved. n Corresponding authors. Tel./fax: þ86 25 83795951. E-mail addresses: [email protected] (X. Wu), [email protected] (J. Shen), [email protected] (Y. Li), [email protected] (K.Y. Lee). Control Engineering Practice 30 (2014) 112–123
Transcript of Control Engineering Practice - Baylor...

Hierarchical optimization of boiler–turbine unit using fuzzy stablemodel predictive control
Xiao Wu a,n, Jiong Shen a,n, Yiguo Li a, Kwang Y. Lee b
a Key Laboratory of Energy Thermal Conversion and Control of Ministry of Education, School of Energy and Environment, Southeast University,Sipailou #2, Nanjing 210096, Chinab Department of Electrical and Computer Engineering, Baylor University, One Bear Place #97356, Waco, TX 76798-7356, USA
a r t i c l e i n f o
Article history:Received 28 December 2012Accepted 10 March 2014Available online 13 April 2014
Keywords:Boiler–turbine unitOptimal reference governorStable model predictive controlTakagi–Sugeno fuzzy disturbance modelFuzzy Lyapunov functionSlack and collection matrices
a b s t r a c t
This paper develops a hierarchical control system structure based on the Takagi–Sugeno fuzzy model toachieve an optimal control of a boiler–turbine unit. In the upper layer of the hierarchy, an optimalreference governor is designed to find the optimal operating point. A disturbance term is introduced tothe fuzzy model to lump the modeling mismatch and unknown disturbance. Thus, the effect of plantbehavior variation can be removed and the operating point found can be feasible to control. In the lowerlayer, a stable model predictive controller is developed to track the optimal set-points while guarantee-ing the input-to-state stability of the system. Fuzzy Lyapunov function and appropriate slack andcollection matrices are used to reduce the conservatism of stability design and improve the performance.Through the estimation of the disturbance term using an observer, the two layers in the hierarchy arecoupled and the integrated system can realize a dynamic optimal control of the boiler–turbine unit, evenin the case of severe plant behavior variations.
& 2014 Elsevier Ltd. All rights reserved.
1. Introduction
Boiler–turbine unit is the most important system in a fossil-fuel-fired power plant which is used to convert chemical energy infuel into mechanical and then into electrical energy. For a typicalboiler–turbine unit, the primary task is to regulate the poweroutput to meet the demand of the grid, while maintaining thedrum pressure, steam temperature and water level within giventolerances to keep the power plant operating in a safe mode.
However, due to the energy shortage and environmental concernworldwide as well as competition among utilities and other societydriven forces, more stringent requirements, such as minimization offuel consumption, maximization of duty life and minimization ofpollution, etc., have to be fulfilled by the power plant to achieve anoptimal operation. A most effective and direct way to solve thisproblem is using an optimal control strategy, in which not only theconventional dynamic control performance, but also aforementionedmultiple objectives need to be considered.
Supervisory control is a typical way to realize the optimalcontrol, in which a hierarchical structure with optimization inthe upper layer and control in the lower layer is usually adopted
(Qin & Badgwell, 2003). Garduno-Ramirez and Lee (2001) pre-sented the concept of optimal reference governor (ORG), where asteady-state nonlinear model of the boiler–turbine unit is used ina multi-objective optimization to provide the optimal operationpoints for the PID controllers, which then drive the plant to trackthese points. In Heo, Lee and Garduno-Ramirez (2006) and Heoand Lee (2008), steady-state neural network model is used insteadof the nonlinear mathematical boiler–turbine model and anintelligent algorithm is adopted for the ORG to calculate theoptimal set-points. Although these optimal control strategies showgreater improvement in operation, they generally have the follow-ing problems:
1. The effectiveness of the set-point optimization is greatly rely-ing on the accuracy of the steady-state model, which brings aheavy burden on modeling. Moreover, since the characteristicsof power plant are protean due to the equipment wear,environment change and fuel variation, when an unknowndisturbance or change in plant behavior occurs, the optimiza-tion cannot remove their effects and maintain the optimalityanymore, and the operating points found may not be in steady-state or feasible.Although the use of an adaptive static model in the optimiza-tion layer is a good way to deal with this problem (Heo & Lee,2008), both the model update and nonlinear optimization aretime consuming, which means the optimization in the upper
Contents lists available at ScienceDirect
journal homepage: www.elsevier.com/locate/conengprac
Control Engineering Practice
http://dx.doi.org/10.1016/j.conengprac.2014.03.0040967-0661/& 2014 Elsevier Ltd. All rights reserved.
n Corresponding authors. Tel./fax: þ86 25 83795951.E-mail addresses: [email protected] (X. Wu), [email protected] (J. Shen),
[email protected] (Y. Li), [email protected] (K.Y. Lee).
Control Engineering Practice 30 (2014) 112–123

layer is implemented much less frequently than the lowercontrol layer (Lawrynczuk, Marusak, & Tatjewski, 2008;Lawrynczuk, 2011). Thus significant optimality loss still occursfor fast disturbances on fuel, air or feedwater rate due toemergency failure of components such as pulverizes, feeders,air fans or pumps.
2. The two layers in the hierarchical structure are independentfrom each other, because different models are used in eachlayer; and moreover, the control layer accepts the set-pointsfrom the optimization layer without any feedback. Thus, theycannot take full advantage of the two layers in realizing anintegrated optimal operation.
For these reasons, these optimal control strategies are essen-tially static optimizations and cannot deal with the plant behaviorvariation effectively.
On the other hand, as power plants increase in size andparticipate in grid power regulation more frequently, the boiler–turbine units are suffering from control problems such as multi-variable, time-varying behavior and the severe nonlinearity over awide operation range, and thus a satisfactory controller needto be built in the lower layer to improve the set-point trackingperformance.
In Zhang et al. (2012), an iterative feedback tuning (IFT) methodis employed to achieve a simultaneous tuning of a cluster ofproportional-integral-derivative (PID) controllers for the boiler–turbine unit. In Tan et al. (2005), a single linear controller wasdesigned on the basis of careful choice of the operating range toavoid severe nonlinearity. To enhance the robustness of the boiler–turbine control system, H1 controllers are well studied based onthe fuzzy model (Wu et al., 2010) and piecewise linear model(Zheng, Bentsman, & Taft, 2008). To overcome the nonlinearity ofboiler–turbine, artificial intelligent techniques have also beenapplied. In Moon and Lee (2003), a fuzzy auto-regressive movingaverage (FARMA) controller was applied to the boiler–turbinesystem with rules generated using the history of input–outputdata. In Dimeo and Lee (1995), genetic algorithm (GA) was used todevelop a linear quadratic regulator (LQR) controller for a boiler–turbine system.
However, none of aforementioned controllers can effectivelyhandle the constraints in the controller design stage, therefore,model predictive control (MPC) has been extensively studied tocontrol the boiler–turbine unit in recent years. Moreover, since adynamic control optimality can be achieved by the MPC, it hasbeen the most suitable controller in the lower layer of thehierarchy to attain an optimal control of the plant (Lawrynczuket al., 2008; Lawrynczuk, 2011; Qin & Badgwell, 2003; Rawlings,2000).
In Moon and Lee (2009), a dynamic matrix control (DMC) isemployed for the boiler–turbine. It shows that the step-responsemodel based on the test data is more suitable than the linearizedmodel, but the performance of the proposed linear controller isstill degraded for a wide range operation. In Lee et al. (2010) andLiu, Guan, and Chan (2010), nonlinear predictive controllers aredesigned based on the neural network model, neural-fuzzy net-work and input–output feedback linearization. Although the con-trol performance is improved, the nonlinear optimization is timeconsuming. To overcome these problems, multi-model basedMPCs are developed for a wide range operation control ofboiler–turbine, showing better performance than the conventionalpredictive method (Li et al., 2012; Keshavarz, Barkhordari, & Jahed-Motlagh, 2010; Wu et al., 2011, 2012). In Wu et al. (2011, 2012), thestability is considered in the MPC design stage by adopting aninfinite horizon objective function and constructing a Lyapunovfunction to find its upper bound (Kothare, Balakrishnan, & Morari,1996; Lu & Arkun, 2000; Zhang, Feng, & Lv, 2007).
In Wu et al. (2012), the issue of plant behavior variationsis considered. The process model is augmented to include adisturbance term to lump all modeling mismatches and unknowndisturbances, and then a steady-state target calculator (SSTC)(Muske & Badgwell, 2002; Pannocchia, 2003, 2004; Pannocchia& Rawlings, 2003; Zhang, Feng, & Zeng, 2009) is designed toremove their effects and provide feasible set-points to the stablemodel predictive controller (SMPC). It shows that an offset-freetracking of the set-points can be achieved even in the case ofsevere plant behavior variations. However, the optimality of theset-points is still relying on the upper optimization layer. More-over, the controller design is based on the common Lyapunovfunction (CLF) which may lead to conservatism since it is difficultto find a common Lyapunov matrix for all sub-models, especiallyfor complex systems.
Motivated by the effectiveness of the SSTC and SMPC, thispaper extends the results in Wu et al. (2012) and proposes a novelhierarchical structure based on a disturbance fuzzy model toachieve an integrated optimal control of the boiler–turbine unit.
In the upper layer, the SSTC is modified for a fuzzy optimalreference governor (FORG) by considering the operational perfor-mance as additional objective functions in the optimization.A disturbance term is introduced to the fuzzy model to lump themodeling mismatch and unknown disturbances, which is esti-mated and fed back by the control layer. In so doing, the two layersare closely coupled, and thus the effect of plant behavior variationon both control and optimization can be removed.
In the lower layer, an observer is first developed to estimate theunmeasured state variables and the disturbance term. Then, theresults in Wu et al. (2012) is extended by using Fuzzy Lyapunovfunction (FLF) (Guerra & Vermeiren, 2004) and appropriate slackand collection matrices (Ding, 2010; Kim & Lee, 2000), and anSMPC for boiler–turbine unit is designed using the Takagi–Sugeno(TS) fuzzy model. The SMPC can achieve an optimal trackingof the set-points dynamically while guaranteeing the input-to-state stability of the system and satisfying the input constraints.The proposed controller is obtained by solving a set of linearmatrix inequalities (LMIs), which is known to be computationallyefficient.
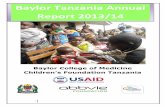
The proposed hierarchical control system structure is shownin Fig. 1. The remainder of this paper is organized as follows:Section 2 introduces the boiler–turbine dynamics. Section 3establishes the TS-fuzzy model of the boiler–turbine system. Thehierarchical control system is presented in Section 4 with simula-tion results given in Section 5. Finally, some conclusions are drawnin Section 6.
2. Boiler–turbine dynamics
The boiler–turbine system used in this paper is a 160 MW oil-fired power plant represented as a third-order nonlinear model.The controllable inputs into the system are valve actuator posi-tions, u1, which control the mass flow of fuel, steam to the turbine,u2, and feedwater to the drum, u3. All valve position variables arenormalized to lie in the interval [0, 1]. The measurable outputs ofthe model are electric power, E in MW, represented as y1, drumsteam pressure, P in kg/cm2, represented as y2, and the drumwater level deviation from a set level, L in meters, represented asy3. The state variables are electric power, E, drum steam pressure,P, and steam–water density, ρf. The dynamics of this particularpower plant were recorded and formulated into a mathematicalmodel by Bell and Åström (1987) as shown below
dEdt
¼ ðð0:73u2�0:16ÞP9=8�EÞ=10 ð1Þ
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 113

dPdt
¼ 0:9u1�0:0018u2P9=8�0:15u3 ð2Þ
dρfdt
¼ ð141u3�ð1:1u2�0:19ÞPÞ=85 ð3Þ
Using the solution for ρf, the drum water level can be calculatedusing the following equations:
qe ¼ ð0:854u2�0:147ÞPþ45:59u1�2:514u3�2:096 ð4Þ
αs ¼ð1�0:001538ρf Þð0:8P�25:6Þρf ð1:0394�0:0012304PÞ ð5Þ
L¼ 0:05ð0:13073ρf þ100αsþqe=9�67:975Þ ð6Þ
where αs is the steam quality and qe is the evaporation rate in kg/s.Some typical operating points of the boiler–turbine unit are
shown in Table 1.
3. TS-fuzzy modeling of the bboiler–turbine unit
Suppose the nonlinear boiler–turbine system can be repre-sented as the following discrete-time Takagi–Sugeno (TS) fuzzymodel with its i-th rule described as
Ri : IF zðkÞ isMi; then :
xðkþ1Þ ¼ AixðkÞþBiuðkÞþBdi dðkÞ
yðkÞ ¼ CixðkÞþDiuðkÞþEiþCdi dðkÞ; i¼ 1;2:::m
8<: ð7Þ
where Ri denotes the i-th fuzzy inference rule, m the number offuzzy rules, Mi the fuzzy sets, zðkÞ is the premise variable, xðkÞAℜn
the state variables, uðkÞAℜl the control input variables, yðkÞAℜp
the output variables, dðkÞAℜnd the disturbance term representingcombined modeling mismatch and unmeasured disturbances. Thematrices Ai;Bi;B
di ;Ci;Di; Ei;C
di are local system matrices. Due to the
load dependent characteristic of the boiler turbine, the electricpower, E(k), is chosen as the premise variable.
Optimal Reference Governor
State and Disturbance
Observer
Disturbance Model
Unit Load Demand
Objectives and
Preferences
Optimal State Set-Point
Optimal Input Set-Point
Stable Model Predictive Controller
Disturbance Model Boiler-Turbine Unit
Optimized Control Input
Plant OutputModel Output
State Estimation
Disturbance Estimation
Plant Behavior Variations
Fig. 1. Hierarchical optimal control system structure.
Table 1Typical steady-state operating points of the boiler–turbine unit.
#1 #2 #3 #4 #5 #6 #7
x01 15.27 36.65 50.52 66.65 85.06 105.8 127
x02 75.6 86.40 97.2 108 118.8 129.6 135.4
x03 492.2 469.3 450.9 427.9 398.4 335.4 289.1
u01
0.1191 0.2091 0.2705 0.3402 0.4182 0.5046 0.5878
u02
0.3804 0.5519 0.6209 0.6900 0.7589 0.8279 0.9171
u03
0.1224 0.2556 0.3399 0.4358 0.5433 0.6625 0.7840
y3 0 0 0 0 0 0 0
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123114

By using the fuzzy blending, the dynamic fuzzy models (7) canbe expressed by the following global model:
xðkþ1Þ ¼ AzxðkÞþBzuðkÞþBdzdðkÞ
yðkÞ ¼ CzxðkÞþDzuðkÞþEzþCdzdðkÞ
8<: ð8Þ
where Az ¼∑mi ¼ 1hiðzðkÞÞAi with hiðzkÞ the normalized member-
ship function of the inferred fuzzy set MiðzkÞ, hiðzkÞ ¼MiðzkÞ=∑m
i ¼ 1MiðzkÞ, and other matrices are defined similarly.
To approximate the nonlinear plant using the TS-fuzzymodel (8), it is important to know the level of nonlinearity over fulloperating range, so that the fuzzy model can be developed with aminimum number of linear models. In Tan et al. (2005) and Li et al.(2012), the nonlinearity of the plant is investigated by the meansof gap metric value (Anderson et al., 2000), which is a measure ofthe distance between linear models around adjacent operatingpoints. The results show that the level of nonlinearity increases aspower level increases. Although increasing the number of localmodels will improve the accuracy of the model, for the sake ofsimplicity, three linear models are used in this paper to composethe TS-fuzzy model, which are linear models around (E, P, L)¼(40 MW, 90 kg/cm2, 0 m), (90 MW, 120 kg/cm2, 0 m), (120 MW,130 kg/cm2, 0 m) operating points, representing low, middle, highload behaviors of the boiler–turbine unit, respectively. The localmodel matrices can then be established through the Taylor seriesapproximation and the membership functions shown in Fig. 2 areused to connect the local models to form the TS-fuzzy system.
4. The hierarchical structure of optimal reference governorand stable model predictive controller
4.1. State and disturbance observer
For the TS-fuzzy model (8), the state variable x3, i.e., the steam–
water density, ρf, and the disturbance term are unmeasured.Therefore, an observer is first designed to estimate the unknownstate variable and disturbance term.
We consider the following augmented fuzzy observer (Muske &Badgwell, 2002; Pannocchia, 2003, 2004):
xðkþ1Þdðkþ1Þ
" #¼ Az Bd
z
0 I
" #xðkÞdðkÞ
" #þ Bz
0
� �uðkÞþ
L1zL2z
" #½yðkÞ�yðkÞ�
yðkÞ ¼ CzxðkÞþDzuðkÞþEzþCdz dðkÞ ð9Þ
where the symbol "^” indicates the estimate. By modifying theresults in Feng (2006) using the Fuzzy Lyapunov functions (FLF)and technique of slack and collection matrices, a stable observercan be constructed if there exist matrices H;Gj, symmetric positivedefinite matrices Xi and slack matrices Qk
ij ¼ ðQkjiÞT , such that the
following LMI problem is feasible:
rkiiZQkii i; k¼ 1;2…m
rkijþrkjiZQkijþQk
ji j4 i; i; j; k¼ 1;2;…;m
Ψ k ¼
Qk11 Qk
12 ⋯ Qk1m
Qk21 Qk
22 ⋮ ⋮
⋮ ⋮ ⋱ Qkðm�1Þm
Qkm1 ⋯ Qk
mðm�1Þ Qkmm
26666664
37777775Z0 k¼ 1;2;…;m ð10Þ
where rkij ¼HT þH�Xi n
HAaugi þGjC
augi Xk
" #i; j; k¼ 1;2…m, with the aug-
mented matrices defined by Aaugi ¼ Ai Bd
i
0 I
" #and Caug
i ¼ ½Ci Cdi �,
and “n” in the matrix stands for the corresponding terms for thesymmetric matrix; and Ψ k is the collection matrix composed by the
slack matrices Qkij. Then the observer gains can be determined by
Li ¼H�1Gi ¼L1iL2i
" #; i¼ 1;2…m
The FLF and slack and collection matrices are used in the observerdesign to reduce the conservatism. The details of the technique aredescribed in Appendix as we develop the controller.
Remark 4.1. To ensure the observability of the state and distur-bance variable, the following condition need to be satisfied:
rankI�Ai �Bd
i
Ci Cdi
24
35¼ nþnd ð11Þ
for all i (Muske & Badgwell, 2002; Pannocchia, 2003, 2004).
4.2. Dynamic optimal reference governor
For a given load demand and an arbitrary number of objectivefunctions together with their relative preferences, the goal of theoptimal reference governor (ORG) is to provide the lower MPClayer with the optimal inputs and state set-points. Considering theplant behavior variations, the results of SSTC is extended to a fuzzyORG (FORG) based on the fuzzy model (8). The disturbance term inthe model is used to lump the modeling mismatch and unknowndisturbances so that, by estimating the term, their impact on set-point optimization can be removed in the FORG. Through theestimation with the observer, the optimization and control layersare coupled and the set-points found in the FORG can be tracked inthe MPC layer (Muske & Badgwell, 2002; Pannocchia, 2003, 2004).
The optimal set-points (xs;us) can be obtained by solving thefollowing multi-objective optimization problem at each samplingtime k:
minxs ;us
JE ¼ β1J1ðxs;usÞþβ2J2ðxs;usÞþ…þβgJgðxs;usÞ ð12Þ
s:t: xs ¼ AzxsþBzusþBdz dðkÞ ð13Þ
uminrusrumax ð14Þ
yminr ½Cz Dz �½ xs us �T þEzþCdz dðkÞrymax ð15Þ
20 40 60 80 100 120
0
0.2
0.4
0.6
0.8
1
Power (MW)
Deg
ree
of M
embe
rshi
p
Fig. 2. Membership functions of the boiler–turbine fuzzy model.
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 115

where the objective function JE is a weighted sum of the specifiedobjective functions ðJ1; J2:::JgÞ with their respective preferencesβ¼ ½β1; β2…βg�. The objective functions may account for loadtracking error, fuel consumption, heat rate, pollution or any otheroperating objective of interest to be optimized. The three con-straints (13)–(15) stand for the steady-state requirement for theset-points and the imposed limitations on input and outputvariables, where umin;umax; ymin; ymax are respectively the lowerand upper limits of the input and output.
One question that might arise is whether this fuzzy disturbancemodel can describe the nonlinear dynamics of boiler–turbine wellenough, so that the optimal set-points can be found. To answerthis, first note that whether the modeling mismatch exist or not,the disturbance term will make the model become accurate whenthe system reaches the set-point. Secondly, due to the strictrequirements for power output, drum pressure, drum water leveland so on, the optimal set-point for a given load demand of powerplant is generally confined in a small region. Therefore, the fuzzymodel being accurate at one set-point in a local region may yieldenough accuracy within the region, which makes it possibleto provide satisfactory suboptimal set-points. Thirdly, a two-optimization layer structure can be used to recover some of theoptimality loss, in which a nonlinear ORG is updated and calcu-lates set-points less frequently, and a FORG is implemented at thesame frequency as the controller.
Remark 4.2. If the constraints in the FORG are too stringent tomake it feasible, soft constraints can be considered as suggested inWu et al. (2012).
Once the optimal steady-state set-point (xs,us) is obtained, bysubtracting (13) from the state equation in (8), we can get
xðkþ1Þ�xs ¼ AzðxðkÞ�xsÞþBzðuðkÞ�usÞþBdz ðdðkÞ� dðkÞÞ ð16Þ
Noting that the disturbance estimation error is bounded with thehelp of the observer, we can use the nominal model of (16) forprediction:
xðkþNþ1jkÞ ¼ AzxðkþNjkÞþBzuðkþNjkÞ ð17Þ
where x¼ x�xs and u¼ u�us are the state and input trackingerrors, respectively.
4.3. Stable model predictive tracking control based onTS-fuzzy model
The goal of the lower layer MPC is to achieve a dynamic optimalcontrol performance and guarantee the input-to-state stability ofthe system, which can be achieved by considering the followinginfinite-horizon objective function:
J10 ðkÞ ¼ ∑1
N ¼ 0½xðkþNjkÞTQ0xðkþNjkÞþuðkþNjkÞTR0uðkþNjkÞ� ð18Þ
where Q0 ¼ QT040; R0 ¼ RT
040 are symmetric weightingmatrices of states and control moves, respectively. The MPC canbe designed by constructing a Lyapunov function to find the upperbound of (18) (Kothare et al. 1996; Lu & Arkun, 2000; Zhang et al.,2007), and solving an equivalent LMI problem to minimize it.Considering the effect of state estimation error, in this paper astable model predictive controller (SMPC) is designed based on theTS-fuzzy model by modifying the works of Zhang et al. (2009) andWu et al. (2012). Fuzzy Lyapunov function and appropriate slackand collection matrices are used in this controller to furtherreduce the conservatism and improve the optimality. Details ofthe controller design are shown in Appendix.
5. Simulation results
We now apply the proposed hierarchical optimal controlstructure to the boiler–turbine unit. The mission is using the FORGto search for the optimal operating set-point for the given unitload demand that minimizes multi-objective optimization func-tions and using the SMPC to track the optimal operating set-point.
The following objective functions are taken into considerationin the FORG:
J1ðxs;usÞ ¼ us;1
J2ðxs;usÞ ¼ �us;2
J3ðxs;usÞ ¼ �us;3
J4ðxs;usÞ ¼ jPs�Ptypicalj ð19Þ
where J1 represents the fuel consumption of the boiler, J2 repre-sents the pressure drop across the steam valve and wear and tearof the steam valve, J3 represents the pressure drop across thefeedwater flow valve and wear and tear of the feedwater valve,and J4, which is the pressure deviation from the design point,represents the willingness of the operator to make the plantoperate in the typical working point Ptypical. Note that because thispoint is given by the designer, it implies that keeping the drumpressure close to this point for a given loading condition may havea better reliability for the integrated safe and economical opera-tion of the plant. Ptypical can be obtained from Table 1, according tothe unit load demand, and Ps is the pressure set-point, expressedby
Ps ¼ ½½Cz Dz �½xs us�T þEzþCdz dðkÞ�2
in a MATLAB form, where [.]2 represents the second componentsince the pressure is the second component of the output vector yin (8). We also take into account the constraints for the input andoutput set-points as
0rus;1;us;2;us;3r1
PlowrPsrPhigh
Ls ¼ 0
Es ¼ Euld ð20Þ
where Euld is the unit load demand given by the grid, and Es and Lsare the power and drum water level deviation set-points whichcan be expressed in the similar way as Ps. The constraints in (20)represent, respectively, the physical limitations of the actuators,the safe operating requirements for drum pressure set-point, drumwater level deviation set-point, and the load tracking requirementwhich is the primary task of power plant. The bounds of Ps, i.e.,Plow and Phigh, are set as 10 kg/cm2 below and above the typicalpressure set-point Ptypical for a given load demand.
Two different operating cycles are simulated to test the widerange load following ability as well as the optimality of the controlsystem. For the first cycle, we assume the boiler–turbine unitworks at the nominal condition, and for the second cycle, startingat t¼2100 s, we assume a significant behavior variation of theboiler–turbine unit occurs due to fuel variation, equipment wear,or environmental changes. The variation can be represented bychanges of parameters in the original nonlinear model (1)–(3),resulting in a different model:
dEdt
¼ ðð0:511u2�0:102ÞP9=8�0:4EÞ=10 ð21Þ
dPdt
¼ 0:53u1�0:0012u2P9=8�0:08u3 ð22Þ
dρfdt
¼ ð98:7u3�ð0:77u2�0:133ÞPÞ=85 ð23Þ
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123116

Thus both the FORG and controller developed based on theoriginal model are suffering from severe modeling mismatch.
The sampling time for the TS fuzzy model and controller are setas 1 s and we set
Bdi ¼
0:02 0 00 0:03 00 0 0:01
264
375; Cd
i ¼ 03�3; i¼ 1;2;3
for the matrices of disturbance term. Selection of these matriceswill influence the disturbance rejection property of the controller,and how to determine them are well introduced in Muske andBadgwell (2002) and Pannocchia (2003 and 2004). The parametersof the SMPC are set as
Q0 ¼ I3�3;R0 ¼ 10001 0 00 10 0
0 1
264
375;ω¼ ½0:1 0:1 5 �T :
As shown in (18), Q0 and R0 are the weighting matrices of statesand control moves, respectively. Therefore, we use a large R0 toreduce the inputs vibrations as well as resulting outputs fluctua-tions. Such a design also accounts for better tracking the input set-points, which to a large extent, reflect the operational objectives. ωis the upper bound of the state estimation error, which isintroduced in the Appendix.
First, in order to evaluate the effectiveness of the proposedoptimal control system design, two cases with different prefer-ences in the FORG are considered for comparison:
Case 1. Proposed hierarchical structure with preferences:β¼ ½4:0;0:0;0:0;0:0� (fuel minimization mode).
Case 2. Proposed hierarchical structure with preferences:β¼ ½4:0;8:6;0:1;0:05� (multi-objective mode).
The simulation results are shown in Figs. 3 and 4.From the control results, we can see that according to the given
load demand and different objective functions, Cases 1 and 2,
different set-points are calculated by the FORG in the upper layerof the hierarchy. Since the disturbance term keeps lumping themodeling mismatch and unknown disturbances, the set-pointskeeps varying until the effects of the mismatch are removed fromthe system, which can be clearly seen from Fig. 4. Consequently,achievable and optimal set-points can be provided by the FORGand tracked by the SMPC even in the case of significant modelingmismatch.
The performance of the FORG in both Cases 1 and 2 arecompared in Table 2, in which all objective functions in the twocases are integrated over the simulation time. A smaller valueindicates better performance, including the negative values for J2and J3. The result is consistent with the mode of operations, in thatfor Case 1, the fuel consumption J1, is minimized, while for Case 2,the integrated objective function JE , is minimized.
To further demonstrate the advantages of the proposed optimalcontrol system design, two other cases are considered, in which asteady-state nonlinear model of the boiler–turbine is used in theupper layer, i.e., nonlinear ORG (NORG), resulting in a staticoptimization for the set-points (Garduno-Ramirez & Lee, 2001):
Case 3. Hierarchical structure with NORG in the upper layer(preferences: β¼ ½4:0;8:6;0:1;0:05�) and fuzzy stable model pre-dictive controller (Wu et al., 2011) in the lower layer.
Case 4. Hierarchical structure with NORG in the upper layer(preferences: β¼ ½4:0;8:6;0:1;0:05�), SSTC in the middle layerand proposed SMPC in the lower layer.
The control result for Case 3 is shown in Fig. 5, from which wecan find that: the optimal set-points provided by the NORG arefixed for each load demand. In the first cycle, since the boiler–turbine unit is working in the nominal condition, optimal andfeasible set-points can be provided by the NORG accurately;however, because the unavoidable modeling mismatch of the TS-fuzzy model, these set-points still cannot be tracked well toachieve a satisfactory control, which is primarily reflected in the
0 1000 2000 3000 400050
100
150
Dru
m P
ress
ure
(Kg/
cm2 )
0 1000 2000 3000 40000
50
100
150
Pow
er o
utpu
t (M
W)
Case 1
0 1000 2000 3000 4000
-0.5
0
0.5
Time (second)
Dru
m W
ater
Lev
el (m
)
0 1000 2000 3000 400050
100
150
0 1000 2000 3000 40000
50
100
150Case 2
0 1000 2000 3000 4000
-0.5
0
0.5
Time (second)
Fig. 3. Output performance of the boiler–turbine unit (solid line: output; dotted line: set-point), a severe plant behavior variation occurs from t¼2100 s.
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 117

drum water level. In the second cycle, where significant modelingmismatch occurs, both the optimization and the control layers aresuffering severely. For the NORG the optimality and the feasibilityof the set-points cannot be guaranteed and for the MPC, largetracking errors exist. This is clearly shown by the power outputand drum water level in the second cycle, which has significanttracking offsets, and the boiler–turbine unit cannot maintain itsmain task of load following and safe operation.
Though to a large extent, the input variables reflect the optimaloperational objectives, the output variables are still more impor-tant due to the load following and safe operational tasks, whichare shown in the constraints of the FORG (20). Thus Case 4 isconsidered in which an SSTC using the disturbance model isdesigned to coordinate the optimization layer and control layer,so that the output set-points provided by the NORG can be tracked(Wu et al., 2012). However, in the case of severe plant behaviorvariations, the optimality and feasibility of the set-points can nolonger be guaranteed by the NORG; therefore, although theseoutput set-points can now be tracked, the optimality loss will stilloccur. Furthermore, the resulting NORG/SSTC/MPC hierarchy hasthree levels and therefore, it is complex in both structure andcomputation. The simulation result is shown in Figs. 6 and 7 bycomparison with Case 2.
From the results, we can see that all output set-points for eachcase can be tracked very well even as significant modelingmismatch occurs. However, the set-points found for each caseare different, resulting in differences in optimality. Instead of theset-points, the values of input and output variables when system
reaches steady-state are used to calculate the objective function(12) and the optimal control performances of Cases 2 and 4 arecompared in Table 3.
From Table 3, we can see that during the first cycle since thestatic nonlinear model in the NORG is totally accurate, the bestperformance is achieved by Case 4. For Case 2, the same set-pointsare found under 15.27 MWand 66.65 MW load demand, but worseset-point is found under 127 MW load demand. As mentioned,although the TS-fuzzy model becomes accurate at the (135.4 Kg/cm2, 127 MW, 0 m) point with the help of the disturbance term, itstill has some error with the model at (125.4 Kg/cm2, 127 MW,0 m) operating point, which results in a suboptimal set-point.However, because of the strict constraints of the set-point opti-mization (20), this model error is limited and the objectivefunction value of the local optimal set-point is quite close to theglobal one (0.074 difference).
On the other hand, when the severe plant behavior variationoccurs, Case 2 has a much better performance compared withCase 4. The effectiveness of the FORG is shown under 66.65 MWand 127 MW load demand. It is also interested to note that underthe 15.27 MW load demand, the steady-state objective functions oftwo cases are the same. The reason is that the boiler–turbinesystem model is square (i.e., l¼ n¼ p); therefore, since the outputset-points found are coincidently the same and can be tracked byboth controllers in two cases, the steady-state input values areunique. Note that, if different output set-points are found or thedimension of input variable is greater than the dimension ofoutput variable (i.e., l4p), this coincidence would not happen,and Case 2 may have a better performance.
6. Conclusions and future directions
In this paper, a new hierarchical control structure is proposedto realize a dynamic optimal operation of the boiler–turbine unit.In the upper layer of the hierarchy, the idea of steady-statetarget calculator (SSTC) in model predictive tracking controller is
0 1000 2000 3000 40000
0.5
1
Fuel
Flo
w V
alve
Case 1
0 1000 2000 3000 40000
0.5
1
Ste
am C
ontro
l Val
ve
0 1000 2000 3000 40000
0.5
1
Time (second)
Feed
wat
er C
ontro
l Val
ve0 1000 2000 3000 4000
0
0.5
1
Case 2
0 1000 2000 3000 40000
0.5
1
0 1000 2000 3000 40000
0.5
1
Time (second)
Fig. 4. Input performance of the boiler–turbine unit (solid line: input; dotted line: set-point), a severe plant behavior variation occurs from t¼2100 s.
Table 2Performance of the FORG.
J1 J2 J3 J4 JE
Case 1 1208.8 �2479.4 �1428.2 40713 �14594Case 2 1244.7 �2324.5 �1431.3 2017.4 �15054
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123118

extended to the fuzzy optimal reference governor (FORG) byperforming a multi-objective optimization. Based on the fuzzydisturbance model, the FORG can overcome the drawbacks ofconventional static nonlinear optimization in the case of severeplant behavior variations. In the lower layer of the hierarchy, astable model predictive controller (SMPC) is developed to track theoptimal set-points provided by the upper layer while guaranteeingthe input-to-state stability of the system. The design is based on
the TS-fuzzy model to deal with the problem of nonlinearity over awide operating range. A relaxed fuzzy Lyapunov function and thetechnique of slack and collection matrices are used to reduce theconservatism in the stability design and improve the optimality.Through the estimation of the disturbance term, the two layersare connected and cooperated with each other and a dynamicoptimal control is achieved by the resulting integrated hierarchicalstructure.
0 1000 2000 3000 400050
100
150
0 1000 2000 3000 40000
50
100
150Case 4
0 1000 2000 3000 4000-0.5
0
0.5
Time (second)
0 1000 2000 3000 400050
100
150
Dru
m P
ress
ure
(Kg/
cm2 )
0 1000 2000 3000 40000
50
100
150
Pow
er O
utpu
t (M
W) Case 2
0 1000 2000 3000 4000-0.5
0
0.5
Time (second)
Dru
m W
ater
Lev
el
Fig. 6. Output performance of the boiler–turbine unit (solid line: output; dotted line: set-point), a severe plant behavior variation occurs from t¼2100 s.
0 1000 2000 3000 400050
100
150D
rum
Pre
ssur
e (K
g/cm
2 )
0 1000 2000 3000 40000
100
200
Pow
er O
utpu
r (M
W) Output
0 1000 2000 3000 4000-0.5
0
0.5
Time (second)
Dru
m W
ater
Lev
el (m
)0 1000 2000 3000 4000
0
0.5
1
Fuel
Flo
w V
alve
Input
0 1000 2000 3000 40000
0.5
1
Ste
am C
ontro
l Val
ve0 1000 2000 3000 4000
0
0.5
1
Time (second)Fe
edw
ater
Flo
w V
alve
Fig. 5. Performance of the boiler–turbine unit for Case 3 (solid line: output (left) and input (right); dotted line: set-point), a severe plant behavior variation occurs fromt¼2100 s.
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 119

For comparison purpose, the proposed method is validatedthrough simulations on a simple benchmark model, and applyingit to more realistic power plant systems will be our future interest.Over the course of the last two decades, the wide use ofdistributed control system (DCS) in power plant and the develop-ment of computer technologies have facilitated the employment ofadvanced control approaches. The new control software could beinstalled on the programmable logic controllers (PLCs) or indus-trial computers and communicates with the DCS through the OPCor Modbus protocols, which will then collect the required data andsend the commands to regulate the actuators. However, consider-ing the complexity of the power plants and their important rolesin the power system, there are several issues need to be furtherstudied to keep the method practical.
(1) Modeling: it is the first and foremost important step in advancedcontroller design. In this work, on the basis of existing analyticalmodel, transformation has been used to obtain the linear state-space models. However, for real power plant, it is difficult todevelop an accurate analytical model without the knowledge ofthermodynamics and design specifications of many components.For this reason, data-driven identification methods provide amore efficient way to develop a control oriented model inpractice. In that case, how to design an optimal input signal foridentification, examine and polish the data, select the modelstructure, and combine the local models to form the integratedsystem (using human knowledge or automated tuning methods
such as adaptive neuro-fuzzy inference system, ANFIS or fuzzyclustering) are important issues.
(2) Reliability: compared with the single-input, single-output PI/PID control loops currently used in thermal power plants, theproposed controller is complicated in structure, parameterstuning and computation; therefore, it has some limitations inreliability. Furthermore because the multi-variable controllerwould work on a centralized control unit, a failure of thecontrol algorithm would induce a failure of the entire plant.These are also the main reasons that modern control techni-ques are still far from being widely employed.
Besides careful design and testing of the controller andtraining of the plant personnel, a possible way to directlyensure the reliability of the system is keeping the well-assessed SISO PID loops present in the control structure. Thus,the new control system could be disconnected anytime, with-out compromising the plant safety. In this case, study ofbumpless switchover mechanism between advanced control-ler and PID controller could be made.
Acknowledgement
This work was supported in parts by the National Natural ScienceFoundation of China (NSFC) under Grants 51036002 and 51076027,the Scientific Research Foundation of Graduate School of SoutheastUniversity under Grant ybjj1120, the U.S. National Science Founda-tion under Grant ECCS 0801440 and the Foundation of State KeyLaboratory of Coal Combustion under Grant FSKLCC1203.
Appendix. Stable model predictive tracking controller
Theorem A.1. Consider the discrete fuzzy system (8) under inputconstraint: umin;prupðkþNjkÞrumax;p; NZ0; p¼ 1;2; :::; l, with
0 1000 2000 3000 40000
0.5
1
Case 4
0 1000 2000 3000 4000
0
0.5
1
0 1000 2000 3000 40000
0.5
1
Time (second)
0 1000 2000 3000 40000
0.5
1
Fuel
Flo
w V
alve
Case 2
0 1000 2000 3000 40000
0.5
1
Ste
am C
ontro
l Val
ve
0 1000 2000 3000 40000
0.5
1
Time (second)
Feed
wat
er C
ontro
l Val
ve
Fig. 7. Input performance of the boiler–turbine unit (solid line: output; dotted line: set-point), a severe plant behavior variation occurs from t¼2100 s.
Table 3Steady-state objective functions.
Load demand (MW) Case 2 Case 4
15.27 66.65 127 15.27 66.65 127
JE Cycle 1 �2.806 �4.619 �5.593 �2.806 �4.619 �5.667Cycle 2 �2.13 �3.081 �3.557 �2.13 �2.885 �3.402
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123120

the augmented observer (9) determined by LMIs (10) and optimal set-points (xs,us) calculated by the FORG (12), at sampling time k.
Suppose there exist a control variable uðkjkÞ, matrices Yi;G, slackmatrices mij ¼ ðmjiÞT ; cij ¼ ðcjiÞT , and symmetric positive definitematrix ~Si, such that the following LMI problem is feasible:
minγ;uðkjkÞ;Yi ;G; ~Si ;mij ;cij
γ
s:t:ðA2Þ�ðA9Þ ðA1Þwhere
1 n n n n
AzðkÞxsðkÞþBzðkÞuðkjkÞ ~Si2 0 0 0
Q1=20 xsðkÞ 0 γI
2 0 0
R1=20 uðkjkÞ 0 0 γI 0
AzðkÞω 0 0 0~Si2
2666666664
3777777775Z0 i¼ 1;2:::m ðA2Þ
nkiiZmk
ii i; k¼ 1;2:::m ðA3Þ
nkijþnk
jiZmkijþmk
ji j4 i; i; j; k¼ 1;2; :::;m ðA4Þ
Μk ¼
mk11 mk
12 ⋯ mk1m
mk21 mk
22 ⋮ ⋮
⋮ ⋮ ⋱ mkðm�1Þm
mkm1 ⋯ mk
mðm�1Þ mkmm
2666664
3777775Z0 k¼ 1;2; :::;m ðA5Þ
ðumin�usðkÞÞruðkjkÞr ðumax�usðkÞÞ ðA6Þ
oiiZcii i¼ 1;2:::m ðA7Þ
oijþojiZcijþcji j4 i; i; j¼ 1;2; :::;m ðA8Þ
Γ ¼
c11 c12 ⋯ c1mc21 c22 ⋮ ⋮⋮ ⋮ ⋱ cðm�1Þmcm1 ⋯ cmðm�1Þ cmm
266664
377775Z0 ðA9Þ
with
nkij ¼
GþGT � ~Si n n n
ðAiGþBiYjÞ ~Sk 0 0
Q1=2G 0 γI 0R1=2Yj 0 0 γI
2666664
3777775 i; j; k¼ 1;2; :::;m ðA10Þ
oij ¼U Yi
YiT GþGT �Sj
" #i; j¼ 1;2; :::;m ðA11Þ
and xsðkÞ ¼ xðkÞ�xsðkÞ, ω is the upper bound of the state estimationerror j ~xjrω, and U is a diagonal matrix with diagonal elements:Upp ¼ minððumax;p�us;pðkÞÞ2; ðumin;p�us;pðkÞÞ2Þ; p¼ 1;2; :::; l:
Then, at every sampling time k, through minimizing the upperbound of the infinite horizon objective function (18), a control input,uðkÞ ¼ uðkjkÞþusðkÞ, can be determined by the proposed predictivecontroller to track the set-points optimally while guaranteeing theinput-to-state stability of the closed-loop system.
Proof. of Theorem A.1Part 1: minimizing the upper bound of infinite horizon objec-
tive functionThe infinite horizon objective function (18) is divided into two
parts to give the first input variable more freedom in theoptimization (Lu & Arkun, 2000):
J10 ðkÞ ¼ xðkjkÞTQ0xðkjkÞþuðkjkÞTR0uðkjkÞþ J11 ðkÞ ðA12Þ
Corresponding to the TS-fuzzy model, a fuzzy Lyapunov function(FLF) can be used (Guerra & Vermeiren, 2004; Wang, Sun, & Sun,2004):
VðkÞ ¼ xTk ∑m
i ¼ 1hiðzkÞS�1
i xk ¼ xTkS�1z xk ðA13Þ
For a notational convenience, we denote
Xz ¼ ∑m
i ¼ 1hiðzÞXi ¼ ∑
m
i ¼ 1hiðzkÞXi;
Xzþ ¼ ∑m
i ¼ 1hiðzþ ÞXi ¼ ∑
m
i ¼ 1hiðzkþ1ÞXi; ;
and if the increment of the FLF (A13) satisfies
ΔVðkÞ ¼ xTkþ1S�1zþ xkþ1�xTkS
�1z xko0 ðA14Þ
for all time, the system is guaranteed to be stable in the sense ofLyapunov.
To find the upper bound of the infinite-horizon objectivefunction (18), suppose the FLF satisfies
VðkþNþ1jkÞ�VðkþNjkÞr�½xðkþNjkÞTQ0xðkþNjkÞþuðkþNjkÞTR0uðkþNjkÞ� ðA15ÞSumming (A15) for N¼ 1 to N¼1, and with xð1jkÞ ¼ 0 andVð1jkÞ ¼ 0, we get
J11 ðkÞrVðkþ1jkÞ ¼ xðkþ1jkÞTS�1z xðkþ1jkÞ ðA16Þ
Thus we can get the upper bound of J10 ðkÞ:J10 ðkÞrxðkjkÞTQ0xðkjkÞþuðkjkÞTR0uðkjkÞþxðkþ1jkÞTS�1
z xðkþ1jkÞðA17Þ
However, in (A17), xðkjkÞ ¼ xðkÞ ¼ xðkÞ�xsðkÞ is an unmeasuredvariable, which can be rewritten as
xðkjkÞ ¼ xðkÞþ ~xðkÞ�xsðkÞ ¼ xsðkÞþ ~xðkÞ ðA18Þwhere ~xðkÞ is the estimation error between xðkÞ and xðkÞ, andxsðkÞ ¼ xðkÞ�xsðkÞ.
Then the first term of the right hand of (A17) can be rewrittenas
xðkjkÞTQ0xðkjkÞ ¼ ðxsðkÞþ ~xðkÞÞTQ0ðxsðkÞþ ~xðkÞÞr2xsðkÞTQ0xsðkÞþ2 ~xðkÞTQ0 ~xðkÞr2xsðkÞTQ0xsðkÞþC ðA19Þ
where C ¼ 2ωTQ0ω is a constant, and ω is the upper bound of thestate estimation error j ~xjrω.
At sampling time k, since the premise variable zðkÞ is assumedto be available, the current model fAzðkÞ;BzðkÞg can be obtained,and the third term of the right hand of (A17) can be rewritten as
xðkþ1jkÞTS�1z xðkþ1jkÞ ¼ ðAzðkÞxðkÞþBzðkÞuðkjkÞÞTS�1
z ðAzðkÞxðkÞþBzðkÞuðkjkÞÞ
¼ ðAzðkÞxsðkÞþBzðkÞuðkjkÞþAzðkÞ ~xðkÞÞS�1z ðAzðkÞxsðkÞ
þBzðkÞuðkjkÞþAzðkÞ ~xðkÞÞT
r2ðAzðkÞxsðkÞþBzðkÞuðkjkÞÞTS�1z ðAzðkÞxsðkÞ
þBzðkÞuðkjkÞÞþ2ðAzðkÞ ~xðkÞÞTS�1z ðAzðkÞ ~xðkÞÞ
r2ðAzðkÞxsðkÞþBzðkÞuðkjkÞÞTS�1z ðAzðkÞxsðkÞ
þBzðkÞuðkjkÞÞþ2ðAzðkÞωÞTS�1z ðAzðkÞωÞ ðA20Þ
Substituting (A19) and (A20) into (A17), we can get
J10 ðkÞr2xsðkÞTQ0xsðkÞþ2ðAzðkÞωÞTS�1z ðAzðkÞωÞþ2ðAzðkÞxsðkÞ
þBzðkÞuðkÞÞTS�1z ðAzðkÞxsðkÞþBzðkÞuðkÞÞþu kjkð ÞTRuðkjkÞþC
ðA21ÞDefine a scalar γ and suppose
2xs kð ÞTQ0xsðkÞþ2ðAzðkÞωÞTS�1z ðAzðkÞωÞþ2ðAzðkÞxsðkÞ
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 121

þBzðkÞuðkjkÞÞTS�1z ðAzðkÞxsðkÞþBzðkÞuðkjkÞÞþu kjkð ÞTRuðkjkÞrγ
ðA22ÞThen minimizing the upper bound of J10 ðkÞ is equivalent to theminimization of γ, subject to (A22).
By defining ~S�1z ¼ γ�1S�1
z , and using the Schur complement(Kothare et al. 1996), (A22) can be expressed as
1 n n n n
AzðkÞxsðkÞþBzðkÞuðkjkÞ ~Sz2 0 0 0
Q1=20 xsðkÞ 0 γI
2 0 0
R1=20 uðkjkÞ 0 0 γI 0
AzðkÞω 0 0 0~Sz2
2666666664
3777777775Z0 ðA23Þ
which is verified if (A2) holds.Part 2: stability constraintTo work with the TS-fuzzy model and FLF, except the first input
uðkjkÞ which is defined as free variable, the other control sequenceis given by a parallel distributed compensation (PDC) law and anew variable G is added to increase the freedom of optimizationand improve optimality (Oliveira, Bernussou, & Geromel, 1999):
uðkþsjkÞ ¼ YzG�1xðkþsjkÞ; s40 ðA24Þ
where the nominal predictive closed-loop fuzzy system (17) can bedescribed as
xðkþsþ1jkÞ ¼ AzxðkþsjkÞþBzYzG�1xðkþsjkÞ ¼ ðAzþBzYzG
�1ÞxðkþsjkÞðA25Þ
Substituting (A24) and (A25) into (A15) and noting the fact that
ðG� ~SÞT ~S �1ðG� ~SÞZ0 ) GT ~S�1
GZGT þG� ~S ðA26Þthe stability constraint (A15) is satisfied if the following holds:
GT þG� ~Sz�ðAzGþBzYzÞT ~S�1zþ ðAzGþBzYzÞ
�GTQ0γ�1G�YT
z R0γ�1YzZ0 ðA27Þ
Using the Schur complement to express (A27) in LMI gives
GþGT � ~Sz n n n
ðAzGþBzYzÞ ~Szþ 0 0
Q1=20 G 0 γI 0
R1=20 Yz 0 0 γI
2666664
3777775Z0 ðA28Þ
which is equivalent to (A29) according to (A10)
∑m
k ¼ 1hkðzþ Þ ∑
m
i ¼ 1∑m
j ¼ 1hiðzÞhjðzÞnk
ijZ0 ðA29Þ
A direct sufficient condition for (A29) is that all matricesnkijZ0; i; j; k¼ 1;2; :::;m. However, such condition is too conserva-
tive because the interactions among subsystems have not beenused, thus, the technique of slack matrices and collection matricesis employed to (A29) to relax the sufficient condition.
Suppose there exists slack matrices mkijZ0 and collection
matrices Mk, i; j; k¼ 1;2; :::;m, satisfying (A3)–(A5), the left handside of (A29)
¼ ∑m
k ¼ 1hkðzþ Þ ∑
m
i ¼ 1h2i ðzÞnk
iiþ ∑m
i ¼ 1∑m
j4 ihiðzÞhjðzÞðnk
ijþnkjiÞ
!
Z ∑m
k ¼ 1hkðzþ Þ ∑
m
i ¼ 1h2i ðzÞmk
iiþ ∑m
i ¼ 1∑m
j4 ihiðzÞhjðzÞðmk
ijþmkjiÞ
!
Z ∑m
k ¼ 1hkðzþ Þð½h1ðzÞI h2ðzÞI ⋯ hmðzÞI �Mk½h1ðzÞI h2ðzÞI ⋯ hmðzÞI �T ÞZ0
ðA30ÞTherefore, the stability constraints (A15) holds.
Part 3: input constraint
Since we split the input into free variables and the futurecontrol moves determined by state feedback law, we must con-strain them accordingly. For the free variables, we directly con-strain them by the peak bound (A6). For the future control moves,by using the approach in Kothare et al. (1996) and considering(A26), the constraint is verified if the following LMI is feasible:
U Yz
YzT GþGT �Sz
" #Z0 ðA31Þ
Similarly using the slack and collection matrices, we can show that(A7)–(A9) guarantee (A31). Therefore, the input constraint isachieved, and the proof is completed.
Remark A.1. We apply an FLF to improve the stability condition ofMPC and the observer. Note that if all Lyapunov matrices ~Si areimposed to be the same, the FLF reduces to a common Lyapunovfunction (CLF). Therefore the FLF leads to less conservatism instability analysis and stabilization design.
Remark A.2. The technique of slack and collection matrices isused in the LMIs, including stability constraint and input con-straint as well as observer design. This technique can reduce theconservatism in which it collects the interactions among subsys-tems. Note that, if all slack matrices are chosen to be zeros, theconventional result (A29) will be recovered.
Remark A.3. Compared with the conventional fuzzy control, theproposed approach has the advantage that it can achieve stabilityoptimally; moreover, (A15) gives a more stringent stability con-straint which can also guarantee the Lyapunov function of stableMPC to decrease faster than conventional fuzzy control (ΔVr0).
References
Anderson, B., Brinsmead, T., Bruyne, F., Hespanha, J., Liberzon, D., & Morse, A.(2000). Multi model adaptive control. Part 1: Finite controller coverings.International Journal of Robust and Nonlinear Control, 10, 909–929.
Bell, R. D., & Åström, K. J. (1987). Dynamic models for boiler–turbine-alternator units:Data logs and paramter estimation for 160 MW unit, TRFT-3192. Lund, Sweden:Lund Institute of Technology.
Dimeo, R., & Lee, K. Y. (1995). Boiler–turbine control system design using a geneticalgorithm. IEEE Transactions on Energy Conversion, 10(4), 752–759.
Ding, B. (2010). Stabilization of Takagi–Sugeno model via nonparallel distributedcompensation law. IEEE Transactions on Fuzzy Systems, 18(1), 188–194.
Feng, G. (2006). A survey on analysis and design of model-based fuzzy controlsystems. IEEE Transactions on Fuzzy Systems, 14(5), 676–697.
Garduno-Ramirez, R., & Lee, K. Y. (2001). Multiobjective optimal power plantoperation through coordinate control with pressure set point. IEEE Transactionson Energy Conversion, 16(2), 115–122.
Guerra, T. M., & Vermeiren, L. (2004). LMI-based relaxed nonquadratic stabilizationconditions for nonlinear systems in the Takagi–Sugeno's form. Automatica, 40,823–829.
Heo, J. S., Lee, K. Y., & Garduno-Ramirez, R. (2006). Multiobjective control of powerplant using particle swarm optimization techniques. IEEE Transactions onEnergy Conversion, 21(2), 552–561.
Heo, J. S., & Lee, K. Y. (2008). A multiagent-system-based intelligent referencegovernor for multiobjective optimal power plant operation. IEEE Transactions onEnergy Conversion, 23(4), 1082–1092.
Keshavarz, M., Barkhordari, Y., & Jahed-Motlagh, M. R. (2010). Piecewise affinemodeling and control of a boiler–turbine unit. Applied Thermal Engineering, 30,781–791.
Kim, E., & Lee, H. (2000). New approaches to relaxed quadratic stability condition offuzzy control systems. IEEE Transactions on Fuzzy Systems, 8(5), 523–533.
Kothare, M. V., Balakrishnan, V., & Morari, M. (1996). Robust constrained modelpredictive control using linear matrix inequalities. Automatica, 32(10),1361–1379.
Lawrynczuk, M., Marusak, P., & Tatjewski, P. (2008). Cooperation of modelpredictive control with steady-state economic optimisation. Control and Cyber-netics, 37, 133–158.
Lawrynczuk, M. (2011). On-line set-point optimisation and predictive control usingneural Hammerstein models. Chemical Engineering Journal, 166, 269–287.
Lee, K. Y., Van Sickel, J. H., Hoffman, J. A., Jung, W. H., & Kim, S. H. (2010). Controllerdesign for a large-scale ultrasupercritical once-through boiler power plant. IEEETransactions on Energy Conversion, 25, 1063–1070.
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123122

Li, Y., Shen, J., Lee, K. Y., & Liu, X. (2012). Offset-free fuzzy model predictive controlof a boiler–turbine system based on genetic algorithm. Simulation ModellingPractice and Theory, 26, 77–95.
Liu, X., Guan, P., & Chan, C. W. (2010). Nonlinear multivariable power plantcoordinate control by constrained predictive scheme. IEEE Transactions onControl System Technology, 18, 1116–1125.
Lu, Y., & Arkun, Y. (2000). Quasi-min–max MPC algorithms for LPV systems.Automatica, 36, 527–540.
Moon, U., & Lee, K. Y. (2003). A boiler–turbine system control using a fuzzy auto-regressive moving average (FARMA) model. IEEE Transactions on EnergyConversion, 18, 142–148.
Moon, U., & Lee, K. Y. (2009). Step-response model development for dynamicmatrix control of a drum-type boiler–turbine system. IEEE Transactions onEnergy Conversion, 24, 423–430.
Muske, K. R., & Badgwell, T. A. (2002). Disturbance modeling for offset-free linearmodel predictive control. Journal of Process Control, 12, 617–632.
Oliveira, M. C., Bernussou, J., & Geromel, J. C. (1999). A new discrete-time robuststability condition. Systems & Control Letters, 37, 261–265.
Pannocchia, G. (2003). Robust disturbance modeling for model predictive controlwith application to multivariable ill-conditioned processes. Journal of ProcessControl, 13, 693–701.
Pannocchia, G. (2004). Robust model predictive control with guaranteed setpointtracking. Journal of Process Control, 14, 927–937.
Pannocchia, G., & Rawlings, J. B. (2003). Disturbance models for offset-free model-predictive control. AICHE Journal, 49, 426–437.
Qin, S. J., & Badgwell, T. A. (2003). A survey of industrial model predictive controltechnology. Control Engineering Practice, 11, 733–764.
Rawlings, J. B. (2000). Tutorial overview of model predictive control. IEEE ControlSystems Magazine, 20(3), 38–52.
Tan, W., Marquez, H. J., Chen, T., & Liu, J. (2005). Analysis and control of a nonlinearboiler-turbine unit. Journal of Process Control, 15(8), 883–891.
Wang, Y., Sun, Z. Q. & Sun, F. C. (2004). Stability analysis and control of discrete-timefuzzy systems: A fuzzy Lyapunov function approach. In Proceedings of 2004 5thAsian control conference.
Wu, J., Nguang, S. K., Shen, J., Liu, G., & Li, Y. G. (2010). Robust H infinite trackingcontrol of boiler–turbine systems. ISA Transactions, 49, 369–375.
Wu, X., Shen, J., Li, Y. & Lee, K. Y. (2011). Stable model predictive control based on TSfuzzy model with application to boiler–turbine coordinated system. In Proceed-ings of the 50th IEEE conference on decision and control and European control(pp. 3356–3361).
Wu, X., Shen, J., Li, Y. & Lee, K. Y. (2012). Stable model predictive tracking control forboiler–turbine coordinated control system. In Proceedings of 2012 8th IFACsymposium on power plants and power systems control (PPPSC). Toulouse, France.
Zhang, S., Taft, C. W., Bentsman, J., Hussey, A., & Petrus, B. (2012). Simultaneousgains tuning in boiler/turbine PID-based controller clusters using iterativefeedback tuning methodology. ISA Transactions, 51, 609–621.
Zhang, T., Feng, G., & Lv, J. (2007). Fuzzy constrained min–max model predictivecontrol based on piecewise Lyapunov functions. IEEE Transactions on FuzzySystems, 15(4), 686–698.
Zhang, T., Feng, G., & Zeng, X. (2009). Output tracking of constrained nonlinearprocesses with offset-free input-to-state stable fuzzy predictive control. Auto-matica, 45, 900–909.
Zheng, K., Bentsman, J., & Taft, C. W. (2008). Full operating range robusthybrid control of a coal-fired boiler/turbine unit. Journal of Dynamic Systems,Measurement, and Control, 130, 041011-1–041011-14 (Equation Chapter (Next)Section 1).
X. Wu et al. / Control Engineering Practice 30 (2014) 112–123 123