
Continuum models of discrete heterogeneous structures and
23
Journal of Physics: Conference Series OPEN ACCESS Continuum models of discrete heterogeneous structures and saturated porous media: constitutive relations and invariance of internal interactions To cite this article: G L Brovko et al 2007 J. Phys.: Conf. Ser. 62 001 View the article online for updates and enhancements. Recent citations Objective Tensors and Their Mappings in Classical Continuum Mechanics G. L. Brovko - Geometric variational approach to the dynamics of porous medium, filled with incompressible fluid Tagir Farkhutdinov et al - Tensors in Newtonian Physics and the Foundations of Classical Continuum Mechanics George L. Brovko - This content was downloaded from IP address 175.205.235.87 on 07/10/2021 at 05:43
Transcript of Continuum models of discrete heterogeneous structures and

Journal of Physics Conference Series
OPEN ACCESS
Continuum models of discrete heterogeneousstructures and saturated porous mediaconstitutive relations and invariance of internalinteractionsTo cite this article G L Brovko et al 2007 J Phys Conf Ser 62 001
View the article online for updates and enhancements
Recent citationsObjective Tensors and Their Mappings inClassical Continuum MechanicsG L Brovko
-
Geometric variational approach to thedynamics of porous medium filled withincompressible fluidTagir Farkhutdinov et al
-
Tensors in Newtonian Physics and theFoundations of Classical ContinuumMechanicsGeorge L Brovko
-
This content was downloaded from IP address 17520523587 on 07102021 at 0543
Continuum models of discrete heterogeneous
structures and saturated porous media constitutive
relations and invariance of internal interactions
G L Brovko A G Grishayev and O A IvanovaTheory of Elasticity Dept Faculty of Mechanics and Mathematics Lomonosov Moscow StateUniversity Leninskiye Gory Moscow 119992 RUSSIA
E-mail glbmechmathmsusu glbdataforcenet
Abstract Approaches to mechanical (constructive) modeling of nonhomogeneous media withcomplicated structure are presented The constitutive and motion equations of special typediscrete systems are obtained as average equations demonstrating the Cosserat type propertiesof the systems The equations for saturated porous media are proposed with special attention tothe different types of inner interactions The invariance properties of these interactions and theirquantitative contributions are analyzed using the principle of material objectivity the methodsof measurement theory The invariances of compound (force moment) internal interactions arestudied
1 IntroductionClassic continuum mechanics was initiated by European scientists during the 18th-19th centuriesand achieved its self-dependent theoretical status in the 20th century with the appearance ofthe general theory of constitutive relations Present-day views in classic continuum mechanicsmechanics of solids and the theory of elasticity are reflected in modern courses and investigationsbased on general positions of contemporary scientific literature have achieved classic status asfundamental problems (see for example [1ndash14]) and in special studies (see [15ndash25])
In the 19th century attempts were made to describe material structure from beyond theclassical perspective The first well-composed theoretical realization was given in the famouswork by the Cosserat brothers [26] and intensively developed in different theories of momenttype during 1950ndash60s and later [27ndash42] The development of moment theories of Cosserattype media including pseudo-continua concentrated mainly on mathematical questions and wasaccompanied as a rule only by indirect experiments and did not touch upon real examples andconcrete applications
At the same time interest rose in inhomogeneous structures (composites mixturesconglomerates) with interacting phases Since then different theories for such structuresincluding saturated porous media mainly based on the concept of interpenetrative continua weredeveloped concrete static and dynamic problems were solved [43ndash56] and special attention waspaid to the important problem of invariance of interaction forces [55 56] A variety of naturaland artificial porous materials different regimes of gas and fluid flow through filters groundlayers perforated and lattice structures demonstrate the importance of such investigations fromtheoretical and practical points of view
IOP Publishing Journal of Physics Conference Series 62 (2007) 1ndash22doi1010881742-6596621001 The Seventh International Seminar on Geometry Continua and Microstructures
1copy 2007 IOP Publishing Ltd
In the present paper the method of mechanical (constructive) modeling proposed in [57] isused for building mathematical continuum models of discrete and heterogeneous structures Themethod consists of detailed examination of mechanical properties of a representative elementof the structure and derivation of the appropriate continuum relations characterizing withsufficient precision constitutive properties and motion laws of the element In application todiscrete constructions of special type and saturated porous media the method demonstratesthe realization of the interpenetrative continua concept The results obtained on the baseof approaches developed in [51 57ndash59] are presented for Cosserat type structures [60ndash62] andsaturated porous media [63ndash66] together with some new results
11 Models of Cosserat typeThe usage of the method for one- and two-dimensional special type discrete constructions leadsto the averaged continuum forms of constitutive and motion equations which coincide with thecorresponding equations of a Cosserat point All Cosserat continuum kinematic and dynamiccharacteristics get their direct clear mechanical sense in terms of the initial discrete modelsThe cases of uncoupled (disconnected) and momentless (without moment stresses) free Cosseratmodels as well as constrained pseudo-continuum models are distinguished The features ofmotions and equilibrium forms of the obtained models are examined In particular the simpleexamples of one-dimensional continuum models with elastic properties demonstrate the presenceof exactly two forms and two respective frequencies in each mode of free vibration the case offorced vibrations (eg under steady air- or fluid-flow) shows the possibility of disturbing thestability of vibrations and transition to the regime of divergence The models with elastic ndashperfect plastic properties possess an infinite number of equilibrium forms (in a certain range)
Thus the building of Cosserat continuum models from appropriate discrete structures throughthe indicated method of mechanical (constructive) modeling on the one hand permits toimmediate clarification of the mechanical sense of all Cosserat characteristics and on the otherhand it demonstrates the principal availability for real existence (naturally or artificially) ofCosserat type continua and drops a hint at possible ways to technologically manufacture them
12 Modeling of saturated porous mediaUsing the method of mechanical modeling the new model of saturated porous media was builtIn contrast to Biotrsquos one it is able to circumscribe deformations of a skeleton at arbitrary strains(in the Lagrangean description) and arbitrary motions of the fluid (gas) through the skeleton(in the Eulerian description) The model is characterized by specific volume values (regulatedwith continuity equations) of solid (skeleton) and liquid (fluid) components by mixed typeof constitutive equations of the components and by specific force (and moment) interactionsbetween the components The new model clarifies the roles played by Biotrsquos constants byrestricting it to small motions
Also the new model provides a new list of internal interactive forces (between skeleton andfluid) including the static one and three types of dynamic forces the front-face force the viscousdrag force (of Darcyrsquos type) and inertial resistance force (of Biotrsquos type)
13 Analysis of interactive forces in porous mediaInvestigation of the interactive forces using the material objectivity principle leads to generalreduced forms The inertial resistance force in the new model is more specialized than thecorresponding force in Biotrsquos model (the Biotrsquos force does not satisfy the objectivity principle)and coincides with Biotrsquos model only for one-dimensional dynamics (eg longitudinal wavepropagation)
Additional examination of interactive forces with the methods of measurement theory givesmore detailed information disclosing the quantitative features of the dependence of forces on
2
the kinematic characteristics of mutual motion of components It permits estimation of thecomparative effects of different types of forces in different flow regimes (the corresponding tableis presented)
14 Study of compound internal interactionsAnalogously to the previous the invariance properties of composite (force and moment) internalinteractions are studied by means of the objectivity principle in more complicated cases whenforces and moments depend on relative displacements (speed acceleration) and mutual rotations(vortices) The reduced forms are obtained for the cases of solid-solid and solid-fluid aggregatesThe results for saturated porous media show that the fluid-flow may act upon the skeleton notonly with front-face force but with shifting (ldquoliftingrdquo) force as well as with overturning androtating (ldquoscrewrdquo) moments
2 Method of mechanical (constructive) modeling in building Cosserat pointmodelsThe method consists of the following steps
a) detailed analysis of the structure of a medium with complicated properties and elaborationof the appropriate discrete model
b) derivation of motion and constitutive equations for the discrete modelc) obtaining the continuum forms of equations by an averaging procedureIn practice step a) is the most creative step b) is mainly technical and not so hard in its
realization while step c) usually based on certain assumptions and an averaging procedure ofthe appropriate type is the most difficult to explore (and may lead to different results dependingon the assumptions)
We shall illustrate the scheme using the example of one-dimensional Cosserat modelsconcentrating attention on one model of a supplied beam
21 Model of a supplied Cosserat beam211 Discrete construction Let us consider plane-parallel bending-tension motions of ahomogeneous beam with constant section-area supplied by identical rigid massive inclusions(in the form of wheels) periodically placed along the longitudinal line of the beam on aces(spindles) perpendicular to the bending plane of the beam Let the inclusions be capable ofrotation around their spindles and let them be connected with the nearby carrying elementsof the beam by elastic joints as well as connected with their nearest neighbours by elastic beltdrives through transmissive weightless pulleys
The initial (undeformed) and deformed configurations of the supplied beam in its motion(in-plane bending-tension of the supporting beam and rotations of rigid massive inclusions)are schematically shown on Fig 1 We shall use the designation ξ for the x coordinate of thelongitudinal line of the supporting beam in the undeformed configuration ξ is a Lagrangean(ldquomaterialrdquo) coordinate
A cell of the construction is shown in Fig 1 Its image in a deformed configuration of thesupplied beam is shown in Fig 2 together with forces and moments acting on its elements
212 Equations of the discrete model The kinematic characteristics of the cell are thefollowing r mdash radius-vector of the center-point of the cell r+ and rminus mdash radius-vectors of theright and the left edges of the beam-element of the cell λ+ and λminus mdash elongation factors of theright and the left beam-elements of the cell ϕbeam mdash absolute (with respect to x axis) rotationangle of the beam-element tangent at the center-point ϕ+
beam2 and ϕminusbeam2 mdash angles between
the center-point tangent and the tangents at the edges ϕincl mdash absolute rotation angle of the
3
(b)
(a)
a
Figure 1 Supplied beam in pre-deformed (a) and deformed (b) configurations Massiveinclusions are shown as dark circles transmissive weightless pulleys as transparent circles beltdrive as a dashed line A cell of the construction is picked out with a chain line rectangle
incl
beam
incl beam
int
incl
beam
beam
incl
int
Figure 2 Deformed cell external actions and internal moments
massive inclusion ϕ+incl2 and ϕminus
incl2 mdash rotation angles of the right and the left transmissiveweightless pulleys relative to the massive inclusion rotation
External (relative to the cell) forces and moments are formed by the ones external to thewhole system and internal forces and moments of the system playing the external role relativeto the cell The first type external actions are b mdash integrated vector of external forces actingon the cell mbeam mdash external moment acting on the beam-element of the cell mincl mdash externalmoment acting on massive inclusion The second type external actions are F+ and minusFminus mdashvectors of forces acting on the right and the left edges of the cell-beam from the remained partsof the construction M+
beam and minusMminusbeam mdash moments acting on the edges of the cell-beam from
the remained parts of the construction M+incl and minusMminus
incl mdash moments acting on the right and
4
the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

Continuum models of discrete heterogeneous
structures and saturated porous media constitutive
relations and invariance of internal interactions
G L Brovko A G Grishayev and O A IvanovaTheory of Elasticity Dept Faculty of Mechanics and Mathematics Lomonosov Moscow StateUniversity Leninskiye Gory Moscow 119992 RUSSIA
E-mail glbmechmathmsusu glbdataforcenet
Abstract Approaches to mechanical (constructive) modeling of nonhomogeneous media withcomplicated structure are presented The constitutive and motion equations of special typediscrete systems are obtained as average equations demonstrating the Cosserat type propertiesof the systems The equations for saturated porous media are proposed with special attention tothe different types of inner interactions The invariance properties of these interactions and theirquantitative contributions are analyzed using the principle of material objectivity the methodsof measurement theory The invariances of compound (force moment) internal interactions arestudied
1 IntroductionClassic continuum mechanics was initiated by European scientists during the 18th-19th centuriesand achieved its self-dependent theoretical status in the 20th century with the appearance ofthe general theory of constitutive relations Present-day views in classic continuum mechanicsmechanics of solids and the theory of elasticity are reflected in modern courses and investigationsbased on general positions of contemporary scientific literature have achieved classic status asfundamental problems (see for example [1ndash14]) and in special studies (see [15ndash25])
In the 19th century attempts were made to describe material structure from beyond theclassical perspective The first well-composed theoretical realization was given in the famouswork by the Cosserat brothers [26] and intensively developed in different theories of momenttype during 1950ndash60s and later [27ndash42] The development of moment theories of Cosserattype media including pseudo-continua concentrated mainly on mathematical questions and wasaccompanied as a rule only by indirect experiments and did not touch upon real examples andconcrete applications
At the same time interest rose in inhomogeneous structures (composites mixturesconglomerates) with interacting phases Since then different theories for such structuresincluding saturated porous media mainly based on the concept of interpenetrative continua weredeveloped concrete static and dynamic problems were solved [43ndash56] and special attention waspaid to the important problem of invariance of interaction forces [55 56] A variety of naturaland artificial porous materials different regimes of gas and fluid flow through filters groundlayers perforated and lattice structures demonstrate the importance of such investigations fromtheoretical and practical points of view
IOP Publishing Journal of Physics Conference Series 62 (2007) 1ndash22doi1010881742-6596621001 The Seventh International Seminar on Geometry Continua and Microstructures
1copy 2007 IOP Publishing Ltd
In the present paper the method of mechanical (constructive) modeling proposed in [57] isused for building mathematical continuum models of discrete and heterogeneous structures Themethod consists of detailed examination of mechanical properties of a representative elementof the structure and derivation of the appropriate continuum relations characterizing withsufficient precision constitutive properties and motion laws of the element In application todiscrete constructions of special type and saturated porous media the method demonstratesthe realization of the interpenetrative continua concept The results obtained on the baseof approaches developed in [51 57ndash59] are presented for Cosserat type structures [60ndash62] andsaturated porous media [63ndash66] together with some new results
11 Models of Cosserat typeThe usage of the method for one- and two-dimensional special type discrete constructions leadsto the averaged continuum forms of constitutive and motion equations which coincide with thecorresponding equations of a Cosserat point All Cosserat continuum kinematic and dynamiccharacteristics get their direct clear mechanical sense in terms of the initial discrete modelsThe cases of uncoupled (disconnected) and momentless (without moment stresses) free Cosseratmodels as well as constrained pseudo-continuum models are distinguished The features ofmotions and equilibrium forms of the obtained models are examined In particular the simpleexamples of one-dimensional continuum models with elastic properties demonstrate the presenceof exactly two forms and two respective frequencies in each mode of free vibration the case offorced vibrations (eg under steady air- or fluid-flow) shows the possibility of disturbing thestability of vibrations and transition to the regime of divergence The models with elastic ndashperfect plastic properties possess an infinite number of equilibrium forms (in a certain range)
Thus the building of Cosserat continuum models from appropriate discrete structures throughthe indicated method of mechanical (constructive) modeling on the one hand permits toimmediate clarification of the mechanical sense of all Cosserat characteristics and on the otherhand it demonstrates the principal availability for real existence (naturally or artificially) ofCosserat type continua and drops a hint at possible ways to technologically manufacture them
12 Modeling of saturated porous mediaUsing the method of mechanical modeling the new model of saturated porous media was builtIn contrast to Biotrsquos one it is able to circumscribe deformations of a skeleton at arbitrary strains(in the Lagrangean description) and arbitrary motions of the fluid (gas) through the skeleton(in the Eulerian description) The model is characterized by specific volume values (regulatedwith continuity equations) of solid (skeleton) and liquid (fluid) components by mixed typeof constitutive equations of the components and by specific force (and moment) interactionsbetween the components The new model clarifies the roles played by Biotrsquos constants byrestricting it to small motions
Also the new model provides a new list of internal interactive forces (between skeleton andfluid) including the static one and three types of dynamic forces the front-face force the viscousdrag force (of Darcyrsquos type) and inertial resistance force (of Biotrsquos type)
13 Analysis of interactive forces in porous mediaInvestigation of the interactive forces using the material objectivity principle leads to generalreduced forms The inertial resistance force in the new model is more specialized than thecorresponding force in Biotrsquos model (the Biotrsquos force does not satisfy the objectivity principle)and coincides with Biotrsquos model only for one-dimensional dynamics (eg longitudinal wavepropagation)
Additional examination of interactive forces with the methods of measurement theory givesmore detailed information disclosing the quantitative features of the dependence of forces on
2
the kinematic characteristics of mutual motion of components It permits estimation of thecomparative effects of different types of forces in different flow regimes (the corresponding tableis presented)
14 Study of compound internal interactionsAnalogously to the previous the invariance properties of composite (force and moment) internalinteractions are studied by means of the objectivity principle in more complicated cases whenforces and moments depend on relative displacements (speed acceleration) and mutual rotations(vortices) The reduced forms are obtained for the cases of solid-solid and solid-fluid aggregatesThe results for saturated porous media show that the fluid-flow may act upon the skeleton notonly with front-face force but with shifting (ldquoliftingrdquo) force as well as with overturning androtating (ldquoscrewrdquo) moments
2 Method of mechanical (constructive) modeling in building Cosserat pointmodelsThe method consists of the following steps
a) detailed analysis of the structure of a medium with complicated properties and elaborationof the appropriate discrete model
b) derivation of motion and constitutive equations for the discrete modelc) obtaining the continuum forms of equations by an averaging procedureIn practice step a) is the most creative step b) is mainly technical and not so hard in its
realization while step c) usually based on certain assumptions and an averaging procedure ofthe appropriate type is the most difficult to explore (and may lead to different results dependingon the assumptions)
We shall illustrate the scheme using the example of one-dimensional Cosserat modelsconcentrating attention on one model of a supplied beam
21 Model of a supplied Cosserat beam211 Discrete construction Let us consider plane-parallel bending-tension motions of ahomogeneous beam with constant section-area supplied by identical rigid massive inclusions(in the form of wheels) periodically placed along the longitudinal line of the beam on aces(spindles) perpendicular to the bending plane of the beam Let the inclusions be capable ofrotation around their spindles and let them be connected with the nearby carrying elementsof the beam by elastic joints as well as connected with their nearest neighbours by elastic beltdrives through transmissive weightless pulleys
The initial (undeformed) and deformed configurations of the supplied beam in its motion(in-plane bending-tension of the supporting beam and rotations of rigid massive inclusions)are schematically shown on Fig 1 We shall use the designation ξ for the x coordinate of thelongitudinal line of the supporting beam in the undeformed configuration ξ is a Lagrangean(ldquomaterialrdquo) coordinate
A cell of the construction is shown in Fig 1 Its image in a deformed configuration of thesupplied beam is shown in Fig 2 together with forces and moments acting on its elements
212 Equations of the discrete model The kinematic characteristics of the cell are thefollowing r mdash radius-vector of the center-point of the cell r+ and rminus mdash radius-vectors of theright and the left edges of the beam-element of the cell λ+ and λminus mdash elongation factors of theright and the left beam-elements of the cell ϕbeam mdash absolute (with respect to x axis) rotationangle of the beam-element tangent at the center-point ϕ+
beam2 and ϕminusbeam2 mdash angles between
the center-point tangent and the tangents at the edges ϕincl mdash absolute rotation angle of the
3
(b)
(a)
a
Figure 1 Supplied beam in pre-deformed (a) and deformed (b) configurations Massiveinclusions are shown as dark circles transmissive weightless pulleys as transparent circles beltdrive as a dashed line A cell of the construction is picked out with a chain line rectangle
incl
beam
incl beam
int
incl
beam
beam
incl
int
Figure 2 Deformed cell external actions and internal moments
massive inclusion ϕ+incl2 and ϕminus
incl2 mdash rotation angles of the right and the left transmissiveweightless pulleys relative to the massive inclusion rotation
External (relative to the cell) forces and moments are formed by the ones external to thewhole system and internal forces and moments of the system playing the external role relativeto the cell The first type external actions are b mdash integrated vector of external forces actingon the cell mbeam mdash external moment acting on the beam-element of the cell mincl mdash externalmoment acting on massive inclusion The second type external actions are F+ and minusFminus mdashvectors of forces acting on the right and the left edges of the cell-beam from the remained partsof the construction M+
beam and minusMminusbeam mdash moments acting on the edges of the cell-beam from
the remained parts of the construction M+incl and minusMminus
incl mdash moments acting on the right and
4
the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

In the present paper the method of mechanical (constructive) modeling proposed in [57] isused for building mathematical continuum models of discrete and heterogeneous structures Themethod consists of detailed examination of mechanical properties of a representative elementof the structure and derivation of the appropriate continuum relations characterizing withsufficient precision constitutive properties and motion laws of the element In application todiscrete constructions of special type and saturated porous media the method demonstratesthe realization of the interpenetrative continua concept The results obtained on the baseof approaches developed in [51 57ndash59] are presented for Cosserat type structures [60ndash62] andsaturated porous media [63ndash66] together with some new results
11 Models of Cosserat typeThe usage of the method for one- and two-dimensional special type discrete constructions leadsto the averaged continuum forms of constitutive and motion equations which coincide with thecorresponding equations of a Cosserat point All Cosserat continuum kinematic and dynamiccharacteristics get their direct clear mechanical sense in terms of the initial discrete modelsThe cases of uncoupled (disconnected) and momentless (without moment stresses) free Cosseratmodels as well as constrained pseudo-continuum models are distinguished The features ofmotions and equilibrium forms of the obtained models are examined In particular the simpleexamples of one-dimensional continuum models with elastic properties demonstrate the presenceof exactly two forms and two respective frequencies in each mode of free vibration the case offorced vibrations (eg under steady air- or fluid-flow) shows the possibility of disturbing thestability of vibrations and transition to the regime of divergence The models with elastic ndashperfect plastic properties possess an infinite number of equilibrium forms (in a certain range)
Thus the building of Cosserat continuum models from appropriate discrete structures throughthe indicated method of mechanical (constructive) modeling on the one hand permits toimmediate clarification of the mechanical sense of all Cosserat characteristics and on the otherhand it demonstrates the principal availability for real existence (naturally or artificially) ofCosserat type continua and drops a hint at possible ways to technologically manufacture them
12 Modeling of saturated porous mediaUsing the method of mechanical modeling the new model of saturated porous media was builtIn contrast to Biotrsquos one it is able to circumscribe deformations of a skeleton at arbitrary strains(in the Lagrangean description) and arbitrary motions of the fluid (gas) through the skeleton(in the Eulerian description) The model is characterized by specific volume values (regulatedwith continuity equations) of solid (skeleton) and liquid (fluid) components by mixed typeof constitutive equations of the components and by specific force (and moment) interactionsbetween the components The new model clarifies the roles played by Biotrsquos constants byrestricting it to small motions
Also the new model provides a new list of internal interactive forces (between skeleton andfluid) including the static one and three types of dynamic forces the front-face force the viscousdrag force (of Darcyrsquos type) and inertial resistance force (of Biotrsquos type)
13 Analysis of interactive forces in porous mediaInvestigation of the interactive forces using the material objectivity principle leads to generalreduced forms The inertial resistance force in the new model is more specialized than thecorresponding force in Biotrsquos model (the Biotrsquos force does not satisfy the objectivity principle)and coincides with Biotrsquos model only for one-dimensional dynamics (eg longitudinal wavepropagation)
Additional examination of interactive forces with the methods of measurement theory givesmore detailed information disclosing the quantitative features of the dependence of forces on
2
the kinematic characteristics of mutual motion of components It permits estimation of thecomparative effects of different types of forces in different flow regimes (the corresponding tableis presented)
14 Study of compound internal interactionsAnalogously to the previous the invariance properties of composite (force and moment) internalinteractions are studied by means of the objectivity principle in more complicated cases whenforces and moments depend on relative displacements (speed acceleration) and mutual rotations(vortices) The reduced forms are obtained for the cases of solid-solid and solid-fluid aggregatesThe results for saturated porous media show that the fluid-flow may act upon the skeleton notonly with front-face force but with shifting (ldquoliftingrdquo) force as well as with overturning androtating (ldquoscrewrdquo) moments
2 Method of mechanical (constructive) modeling in building Cosserat pointmodelsThe method consists of the following steps
a) detailed analysis of the structure of a medium with complicated properties and elaborationof the appropriate discrete model
b) derivation of motion and constitutive equations for the discrete modelc) obtaining the continuum forms of equations by an averaging procedureIn practice step a) is the most creative step b) is mainly technical and not so hard in its
realization while step c) usually based on certain assumptions and an averaging procedure ofthe appropriate type is the most difficult to explore (and may lead to different results dependingon the assumptions)
We shall illustrate the scheme using the example of one-dimensional Cosserat modelsconcentrating attention on one model of a supplied beam
21 Model of a supplied Cosserat beam211 Discrete construction Let us consider plane-parallel bending-tension motions of ahomogeneous beam with constant section-area supplied by identical rigid massive inclusions(in the form of wheels) periodically placed along the longitudinal line of the beam on aces(spindles) perpendicular to the bending plane of the beam Let the inclusions be capable ofrotation around their spindles and let them be connected with the nearby carrying elementsof the beam by elastic joints as well as connected with their nearest neighbours by elastic beltdrives through transmissive weightless pulleys
The initial (undeformed) and deformed configurations of the supplied beam in its motion(in-plane bending-tension of the supporting beam and rotations of rigid massive inclusions)are schematically shown on Fig 1 We shall use the designation ξ for the x coordinate of thelongitudinal line of the supporting beam in the undeformed configuration ξ is a Lagrangean(ldquomaterialrdquo) coordinate
A cell of the construction is shown in Fig 1 Its image in a deformed configuration of thesupplied beam is shown in Fig 2 together with forces and moments acting on its elements
212 Equations of the discrete model The kinematic characteristics of the cell are thefollowing r mdash radius-vector of the center-point of the cell r+ and rminus mdash radius-vectors of theright and the left edges of the beam-element of the cell λ+ and λminus mdash elongation factors of theright and the left beam-elements of the cell ϕbeam mdash absolute (with respect to x axis) rotationangle of the beam-element tangent at the center-point ϕ+
beam2 and ϕminusbeam2 mdash angles between
the center-point tangent and the tangents at the edges ϕincl mdash absolute rotation angle of the
3
(b)
(a)
a
Figure 1 Supplied beam in pre-deformed (a) and deformed (b) configurations Massiveinclusions are shown as dark circles transmissive weightless pulleys as transparent circles beltdrive as a dashed line A cell of the construction is picked out with a chain line rectangle
incl
beam
incl beam
int
incl
beam
beam
incl
int
Figure 2 Deformed cell external actions and internal moments
massive inclusion ϕ+incl2 and ϕminus
incl2 mdash rotation angles of the right and the left transmissiveweightless pulleys relative to the massive inclusion rotation
External (relative to the cell) forces and moments are formed by the ones external to thewhole system and internal forces and moments of the system playing the external role relativeto the cell The first type external actions are b mdash integrated vector of external forces actingon the cell mbeam mdash external moment acting on the beam-element of the cell mincl mdash externalmoment acting on massive inclusion The second type external actions are F+ and minusFminus mdashvectors of forces acting on the right and the left edges of the cell-beam from the remained partsof the construction M+
beam and minusMminusbeam mdash moments acting on the edges of the cell-beam from
the remained parts of the construction M+incl and minusMminus
incl mdash moments acting on the right and
4
the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

the kinematic characteristics of mutual motion of components It permits estimation of thecomparative effects of different types of forces in different flow regimes (the corresponding tableis presented)
14 Study of compound internal interactionsAnalogously to the previous the invariance properties of composite (force and moment) internalinteractions are studied by means of the objectivity principle in more complicated cases whenforces and moments depend on relative displacements (speed acceleration) and mutual rotations(vortices) The reduced forms are obtained for the cases of solid-solid and solid-fluid aggregatesThe results for saturated porous media show that the fluid-flow may act upon the skeleton notonly with front-face force but with shifting (ldquoliftingrdquo) force as well as with overturning androtating (ldquoscrewrdquo) moments
2 Method of mechanical (constructive) modeling in building Cosserat pointmodelsThe method consists of the following steps
a) detailed analysis of the structure of a medium with complicated properties and elaborationof the appropriate discrete model
b) derivation of motion and constitutive equations for the discrete modelc) obtaining the continuum forms of equations by an averaging procedureIn practice step a) is the most creative step b) is mainly technical and not so hard in its
realization while step c) usually based on certain assumptions and an averaging procedure ofthe appropriate type is the most difficult to explore (and may lead to different results dependingon the assumptions)
We shall illustrate the scheme using the example of one-dimensional Cosserat modelsconcentrating attention on one model of a supplied beam
21 Model of a supplied Cosserat beam211 Discrete construction Let us consider plane-parallel bending-tension motions of ahomogeneous beam with constant section-area supplied by identical rigid massive inclusions(in the form of wheels) periodically placed along the longitudinal line of the beam on aces(spindles) perpendicular to the bending plane of the beam Let the inclusions be capable ofrotation around their spindles and let them be connected with the nearby carrying elementsof the beam by elastic joints as well as connected with their nearest neighbours by elastic beltdrives through transmissive weightless pulleys
The initial (undeformed) and deformed configurations of the supplied beam in its motion(in-plane bending-tension of the supporting beam and rotations of rigid massive inclusions)are schematically shown on Fig 1 We shall use the designation ξ for the x coordinate of thelongitudinal line of the supporting beam in the undeformed configuration ξ is a Lagrangean(ldquomaterialrdquo) coordinate
A cell of the construction is shown in Fig 1 Its image in a deformed configuration of thesupplied beam is shown in Fig 2 together with forces and moments acting on its elements
212 Equations of the discrete model The kinematic characteristics of the cell are thefollowing r mdash radius-vector of the center-point of the cell r+ and rminus mdash radius-vectors of theright and the left edges of the beam-element of the cell λ+ and λminus mdash elongation factors of theright and the left beam-elements of the cell ϕbeam mdash absolute (with respect to x axis) rotationangle of the beam-element tangent at the center-point ϕ+
beam2 and ϕminusbeam2 mdash angles between
the center-point tangent and the tangents at the edges ϕincl mdash absolute rotation angle of the
3
(b)
(a)
a
Figure 1 Supplied beam in pre-deformed (a) and deformed (b) configurations Massiveinclusions are shown as dark circles transmissive weightless pulleys as transparent circles beltdrive as a dashed line A cell of the construction is picked out with a chain line rectangle
incl
beam
incl beam
int
incl
beam
beam
incl
int
Figure 2 Deformed cell external actions and internal moments
massive inclusion ϕ+incl2 and ϕminus
incl2 mdash rotation angles of the right and the left transmissiveweightless pulleys relative to the massive inclusion rotation
External (relative to the cell) forces and moments are formed by the ones external to thewhole system and internal forces and moments of the system playing the external role relativeto the cell The first type external actions are b mdash integrated vector of external forces actingon the cell mbeam mdash external moment acting on the beam-element of the cell mincl mdash externalmoment acting on massive inclusion The second type external actions are F+ and minusFminus mdashvectors of forces acting on the right and the left edges of the cell-beam from the remained partsof the construction M+
beam and minusMminusbeam mdash moments acting on the edges of the cell-beam from
the remained parts of the construction M+incl and minusMminus
incl mdash moments acting on the right and
4
the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

(b)
(a)
a
Figure 1 Supplied beam in pre-deformed (a) and deformed (b) configurations Massiveinclusions are shown as dark circles transmissive weightless pulleys as transparent circles beltdrive as a dashed line A cell of the construction is picked out with a chain line rectangle
incl
beam
incl beam
int
incl
beam
beam
incl
int
Figure 2 Deformed cell external actions and internal moments
massive inclusion ϕ+incl2 and ϕminus
incl2 mdash rotation angles of the right and the left transmissiveweightless pulleys relative to the massive inclusion rotation
External (relative to the cell) forces and moments are formed by the ones external to thewhole system and internal forces and moments of the system playing the external role relativeto the cell The first type external actions are b mdash integrated vector of external forces actingon the cell mbeam mdash external moment acting on the beam-element of the cell mincl mdash externalmoment acting on massive inclusion The second type external actions are F+ and minusFminus mdashvectors of forces acting on the right and the left edges of the cell-beam from the remained partsof the construction M+
beam and minusMminusbeam mdash moments acting on the edges of the cell-beam from
the remained parts of the construction M+incl and minusMminus
incl mdash moments acting on the right and
4
the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

the left transmissive weightless pulleys from the inclusions of the neighbour cellsInner interactions in the cell are P+ and Pminus mdash tension resistance forces of the right and
the left parts of the cell-beam M+bend and Mminus
bend mdash bending resistance moments of the rightand the left parts of the cell-beam M+
int and Mminusint mdash moments acting from the right and the
left transmissive weightless pulleys on the massive inclusion of the cell Mlowastinclrarrbeam mdash moment
acting from the massive inclusion on the cell-beamThen designating the mass of the cell by mcell and the moment of inertia of the massive
inclusion by Jincl taking into account inertial terms of the translation motion of the cell andthe rotation motion of the inclusion and neglecting the inertial terms of tension and rotation ofthe beam-elements and belt drives we obtain the expression of the virtual work of the cell
δA = bδr + F+δr+ minus Fminusδrminus+
+M+beamδ
(ϕbeam +
∆ϕ+
beam
2
)minus Mminus
beamδ
(ϕbeam minus ∆ϕminus
beam
2
)+
+mbeamδϕbeam + minclδϕincl minus P+ a2δλ+ minus Pminus a
2δλminusminusminusM+
bendδ∆ϕ+
beam
2 minus Mminusbendδ
∆ϕminus
beam
2 + Mlowastinclrarrbeamδϕbeam minus Mlowast
inclrarrbeamδϕincl+
+(M+
incl minus M+int
)δ
(ϕincl +
∆ϕ+
incl
2
)minus
minus(Mminus
incl minus Mminusint
)δ
(ϕincl minus ∆ϕminus
incl
2
)+
+(M+
int minus Mminusint
)δϕincl minus mcellrδr minus Jinclϕinclδϕincl
(21)
Using the principle of a virtual work and the notation for specific (linear) external actions
f =b
a m =
mbeam
a min =
mincl
a (22)
for specific moment interaction mass density and moment of inertia of inclusion
Minclrarrbeam =Mlowast
inclrarrbeam
a ρ =
mcell
a J =
Jincl
a(23)
as well as the notation
A =A+ + Aminus
2
partA
partξ=
A+ minus Aminus
a(24)
for average values and for difference quotients of quantities A+ and Aminus (and T+ = F+ middot eTminus = Fminus middot e Q+ = F+ middot n Qminus = Fminus middot n) we obtain the equations for the discrete model
These equations include the system of dynamic equilibrium equations
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus J ϕincl = 0
(25)
and the equations of a ldquosmooth coincidencerdquo between external and internal (determined byconstitutive equations) force parameters
T = P Mbeam = Mbend Mincl = MintpartT
partξ= partP
partξ partMbeam
partξ= partMbend
partξ partMincl
partξ= partMint
partξ
(26)
The theorem of kinetic energy
W(e) = ˙K + W(i) (27)
5
leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

leads (while eqns (25) (26) hold) to expressions of specific kinetic energy
K =1
2ρ|r|2 +
1
2J ϕ2
incl (28)
and specific power of internal forces
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (29)
Eqn (29) marks out the pairs of conjugate internal force and kinematic parameters
P sim λ Mbend sim partϕbeam
partξ Mint sim partϕincl
partξ Minclrarrbeam sim (ϕincl minus ϕbeam) (210)
and shows that the constitutive equations of the cell should be represented [1 3 10] by thedependence of the set S = (P Mbend Mint Minclrarrbeam) of internal generalized forces on the
retrospective history of the set E =
(λ partϕbeam
partξ partϕincl
partξ (ϕincl minus ϕbeam)
)of internal kinematic
parameters
S(t) = F[E t(s)
]sge0
(211)
where E t(s) = E(t minus s) is the pre-history of the process E(τ) with τ le tThe analysis of objectivity types [5866] of the parameters in (210) shows that the principle
of material frame-indifference [13] does not restrict the relation (211) and in accordance withthe principle of macroscopic determinability [10] the relation (211) is the general reduced formof the constitutive relation of the cell
The simplest variant of constitutive equations (211)
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam)(212)
describes elastic properties of the construction Ctens Cbend Cincl Cinclrarrbeam are the constantsof elastic resistance to tension bending mutual rotations of inclusions and rotations ofinclusions relative to the beam
In particular at small extension of the beam when λ minus 1 = ε 1 and thus partϕbeam
partξ=
κ(1 + ε) sim= κ (κ is the curvature of the supporting beam line) the second of the relations (212)turns into the classic form [15202267] Mbend = Cbendκ
213 Continuum equations In the long-wave approximation the averaging procedure asa rarr 0 applied to (25) (26) leads to the system
partF
partξ+ f minus ρr = 0
partMbeam
partξ+ Qλ + m + Minclrarrbeam = 0
partMincl
partξ+ min minus Minclrarrbeam minus Jϕincl = 0
(213)
together with the identities
T equiv P Mbeam equiv Mbend Mincl equiv Mint (214)
(with analogous designations for quantities evaluated in the limit)
6
The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

The power of internal forces (29) takes the form
W(i) = P middot λ + Mbend middot(
partϕbeam
partξ
)˙
+ Mint middot(
partϕincl
partξ
)˙
+ Minclrarrbeam middot (ϕincl minus ϕbeam)˙ (215)
and the constitutive equations (212) are
P = Ctens(λ minus 1) Mbend = Cbendpartϕbeam
partξ Mint = Cincl
partϕincl
partξ
Minclrarrbeam = Cinclrarrbeam (ϕincl minus ϕbeam) (216)
Eqns (213) express the conditions of the dynamic equilibrium of a one-dimensional Cosseratcontinuum (in this plane case)
In the general case the substitution of the constitutive equations (216) into (213) (with(214)) leads to the system of one vector and two scalar equations for unknown functionsr ϕincl Q (λ and ϕbeam are expressed through r)
214 Particular and special models The particular cases are the following
Disconnected or uncoupled model In the case of absence of interactions between the beam andinclusions ie when Minclrarrbeam = 0 the first two equations (213) describe the motion of thebeam (weighted by inclusions) and the third one independently describes dynamical rotation ofthe inclusions The first two equations of the disconnected model coincide with known equationsof the classic theory of beams [15202267]
Momentless model Here Mincl equiv Mint equiv 0 (for Cincl = 0) The ldquobelt connectionsrdquo vanish butMinclrarrbeam and ϕincl must not be equal to 0
Pseudo-continuum (constrained model) The inner kinematic constrain ϕincl equiv ϕbeam eliminatesϕincl from the set of decision variables and the reaction (ldquosupporting forcerdquo) Minclrarrbeam becomesundetermined by constitutive equations (it is to be determined using the whole system ofequations)
22 Small motions of a supplied beam221 Linearization of equations Let displacements u and w specific elongation ε = λminus1 andthe angles of the beam elements ϕbeam be small and the approximate equalities hold
ξ sim= xpart
partξsim= part
partx λ sim= 1 ϕbeam
sim= partw
partx κ sim= partϕbeam
partxsim= part2w
partx2 (217)
Let the value ranges of ε κ partϕincl
partx ϕinclminusϕbeam be small enough to permit linear constitutive
equations of the elastic type (216) (see (217)) as follows (in classic notation)
P = EScrossε Mbend = EJcrossκ Mint = C partϕincl
partξ
Minclrarrbeam = K (ϕincl minus ϕbeam) (218)
where E is the Young module of the beam material Scross is the area Jcross is the moment ofinertia of the cross-section of the beam C is the stiffness coefficient of the belt drive and K isthe elasticity constant of hinging (between inclusions and the beam)
Then the substitution of (218) in (213) leads to the equations
EScrosspart2u
partx2+ fx = ρ
part2u
partt2 (219)
7
partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

partQ
partx+ fy = ρ
part2w
partt2 (220)
EJcrosspart3w
partx3+ m + Q + K
(ϕincl minus partw
partx
)= 0 (221)
Cpart2ϕincl
partx2minus K
(ϕincl minus partw
partx
)+ min = J
part2ϕincl
partt2 (222)
Here the external forces fx fy and external moments m min are considered as known Hencethe four equations (219)-(222) are a system for four unknown functions u w ϕincl Q witharguments x and t
Eqn (219) is obviously independent of (220)-(222) it describes the longitudinal motion
(longitudinal waves with expansion velocity1 c =radic
ScrossEρ
)
Therefore let us consider only (220)-(222)Eliminating Q from (220)-(222) gives a system of two partial differential equations for two
functions w and ϕincl
minusEJcrosspart4wpartx4 + K part2w
partx2 minus K partϕincl
partxminus partm
partx+ fy = ρpart2w
partt2
C part2ϕincl
partx2 minus Kϕincl + K partwpartx
+ min = J part2ϕincl
partt2
(223)
For the disconnected model (K = 0) the system (223) simplifies because the equationsdecouple The first one is the equation for beam deflection w and agrees with the well-knownZhuravskiy equations [20] of the classic theory (taking into account the mass of inclusions) Thesecond equation describes the rotations of the array of massive inclusions under the externallinear-specific moment min and in the case of C = 0 (momentless model) the disk rotations areindependent of one another
222 Free vibrations Excluding the consideration of longitudinal movement (eqns (223)) letus turn to the natural free linear vibrations (bending and rotations) of the system in the generalcase (when K = 0 and C = 0) in the absence of external forces and moments fy = 0 m = 0and min = 0
Let the boundary conditions be as follows (pinning of the edges x = 0 and x = l the ends ofthe beam and end inclusions are free from moment actions)
w = 0part2w
partx2= 0
partϕincl
partx= 0 (224)
Finding the solution to the problem (223) (224) in the form
w = Cw (x) eiωt ϕincl = Cϕ (x) eiωt (225)
where Cw (x) and Cϕ (x) are the amplitude functions and ω is the angular (radian) frequencyone obtains the system of ordinary differential equations
EJcrossd4Cw(x)
dx4 minus K d2Cw(x)dx2 + K
dCϕ(x)dx
= ρω2Cw (x)
minusCd2Cϕ(x)
dx2 + KCϕ (x) minus K dCw(x)dx
= Jω2Cϕ (x) (226)
Consider amplitude functions (satisfying the boundary conditions (224)) of the form
Cw (x) = A sin px Cϕ (x) = B cos qx + D (227)
1 Remind that ρ denotes the linear mass density of the supplied beam
8
where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

where A B and D are arbitrary constants while p and q are expressed by equalities
p =πk
l q =
πm
l(k m isin N) (228)
Eqns (226) yield
EJcrossAp4 sin px + KAp2 sin px minus KBq sin qx = ρω2A sin pxCBq2 cos qx + KB cos qx + KD minus KAp cos px = Jω2B cos qx + Jω2D
(229)
Eqn (229) hold identically if p = q and D = 0 and (229) turns into the system of two linearalgebraic equations for constants A and B
(minusEJcrossp4 minus Kp2 + ρω2
)A + KpB = 0
KpA +(minusCp2 minus K + Jω2
)B = 0
(230)
The system (230) has a non-trivial solution if and only if its determinant is equal to zero
det
( minusEJcrossp4 minus Kp2 + ρω2 KpKp minusCp2 minus K + Jω2
)= 0
that isρJω4 minus (
JEJcrossp4 + (ρC + KJ) p2 + Kρ
)ω2+
+EJcrossCp6 + K (EJcross + C) p4 = 0(231)
The eqn (231) is biquadratic in the angular frequency ω Considering it as a quadraticequation for ω2 we have the expression of its discriminant
D (p) = (JEJcross)2 p8 minus 2JEJcross (ρC minus KJ) p6+
+[(ρC minus KJ)2 minus 2ρKJEJcross
]p4+
+2Kρ (ρC + KJ) p2 + ρ2K2
(232)
For the discriminant to be non-negative2 both roots of this quadratic equation must be realand positive
ω212(p) =
JEJcrossp4 + (ρC + KJ) p2 + Kρ plusmn radic
D (p)
2ρJ (233)
hence the solutions to the equation (231) are the real nonzero numbers plusmnω1(p) plusmnω2(p) (let usagree that ω1(p) gt 0 ω2(p) gt 0 and ω1(p) le ω2(p))
If K = 0 (general case) then for each p of the form (228) and each corresponding (by (233))one of two obtained values of ω the non-trivial solution of the system (230) for A and B is
A = a(p ω) middot Φ B = Φ (234)
where Φ is an arbitrary (nonzero) constant and
a(p ω) =Kp
EJcrossp4 + Kp2 minus ρω2equiv Cp2 + K minus Jω2
Kp (235)
Hence each solution of the problem (223) (224) in the form (225) is the pair of functions
wj = ajΦj sin pxeplusmniωjt ϕincl j = Φj cos pxeplusmniωjt (j = 1 2) (236)
2 A negative discriminant leads to imaginary values of ω so the solution (225) exponentially decreases or increasesin time Such behavior has no place in conservative (linearly elastic) systems
9
where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

where the signs + or minus as well as the integer j match in both equalities Φj is an arbitrarynonzero constant p is any value of (228) ωj = ωj(p) and aj = a(p ωj) are determined by theformulae (233) and (235)
Due to the linearity of the problem (223) (224) each linear combination of pairs of functions(236) with constant coefficients is a solution too Every possible real-valued combination is apair of sums (with natural k)
w =sumk
sin πkxl
[a
(k)1 Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + a
(k)2 Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
ϕincl =sumk
cos πkxl
[Φ
(k)1 sin (ω
(k)1 t + ϕ
(k)1 ) + Φ
(k)2 sin (ω
(k)2 t + ϕ
(k)2 )
]
(237)
where Φ(k)j ϕ
(k)j are arbitrary constants (j = 1 2) and using (233) (235)
ω(k)j = ωj
(πk
l
) a
(k)j = a
(πk
l ω
(k)j
)(j = 1 2) (238)
The solutions (237) are either finite sums or infinite series for which uniform convergence isprovided by the convergence of the majorant series
sumk
∣∣∣Φ(k)j
∣∣∣ sumk
∣∣∣a(k)j Φ
(k)j
∣∣∣ (j = 1 2)
The pair of functions represents the general form for the solution of the problem (223) (224)(under the stated assumptions)
The essential feature of the solution is that for each oscillation mode determined by a naturalk there exist exactly two values of frequency and two forms of oscillations
In the case of the disconnected model (K = 0) the analysis is simpler and the solutioncorresponds to independent oscillations of the beam and the system of inclusions
223 Example of discrete construction Let us consider the ldquoantenna typerdquo frame construction(Fig 3) of length 1 m made from steel rods of square section with side 5 mm cross rods of250 mm length (conditionally rigid elastically joint to the supporting rod) play the role ofmassive inclusions their tips are connected by rubber thread of diameter 07 mm (belt drive)
Figure 3 Discrete construction (antenna type)
The constants of this model are
E = 2 middot 1011 Nm2 ρ = 061 kg
m J = 78 middot 10minus3 kg middot mJcross = 52 middot 10minus11 m4 K = 250 N C = 25 N middot m2
10
(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

(a) (b)
Figure 4 Dependence of D on k in ranges (a) 1 le k le 100 and (b) 1 le k le 6 (D is measuredin kg2middotN2)
Calculations of the discriminant D frequencies ω(k)1 ω
(k)2 and multipliers a
(k)1 a
(k)2 vs k are
presented in Fig 4 Fig 5 and Fig 6For this model all the values of the discriminant (232) calculated for k = 1 2 100 (in
view of (228)) are positive and the discriminant increases on the interval 4 le k le 100 whatcould be seen on Fig 4 values of the discriminant on the interval 1 le k le 6 are presented in
more detail in Fig 4 (b) Values (238) of the both frequencies ω(k)1 and ω
(k)2 increase on the
interval 1 le k le 100 (see Fig 5) Values (238) of the coefficients a(k)1 and a
(k)2 vs k (expressing
the quotients AB of amplitude coefficients according to (234)) are shown in Fig 6 For lower
frequencies ω(k)1 corresponding values of a
(k)1 are all positive and rapidly tend to zero with
k increasing Values of a(k)2 correspond to higher frequencies ω
(k)2 are all negative and their
absolute values are unbounded in k
(a)0 2 4 6 8 10
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(b)
Figure 5 Graphs of the angular (radian) frequencies ω(k)1 and ω
(k)2 (measured in secminus1) in the
ranges (a) 1 le k le 100 and (b) 1 le k le 10 (ω(k)1 mdash circles ω
(k)2 mdash daggers ω
(k)1 lt ω
(k)2 )
For example for the mode with k = 1 there are exactly two oscillation forms
1) with angular (radian) frequency ω(1)1 = 596 secminus1 (oscillation frequency ν
(1)1 = 949 Hz)
and coefficient a(1)1 = 05972 m and
11
0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

0 20 40 60 80 100-18000
-16000
-14000
-12000
-10000
-8000
-6000
-4000
-2000
0
2000
(a)
1 15 2 25 3 35 4 45 5-08
-06
-04
-02
0
02
04
06
(b)
Figure 6 Graphs of a(k)1 and a
(k)2 (measured in meters) in the ranges (a) 1 le k le 100 and
(b) 1 le k le 5 (a(k)1 mdash circles a
(k)2 mdash daggers)
2) with angular frequency ω(1)2 = 2566 secminus1 (oscillation frequency ν
(1)2 = 4086 Hz) and
coefficient a(1)2 = minus00214 m
0 02 04 06 08 1-001
0
001
002
003
004
005
006
(a)0 02 04 06 08 1
-02
-015
-01
-005
0
005
01
015
02
(b)
Figure 7 The first oscillation mode k = 1 Configurations of the supporting rod (a) androtation angles of supporting rod (b) at maximal deflections in the first (circles) and in thesecond (daggers) oscillation forms (deflections (a) are measured in meters) The solid lineon (b) shows the rotation angles of the rods-inclusions (the same in both oscillation forms)corresponding to maximal deflections (a)
Fig 7 (a) demonstrates the configurations of the supporting rod corresponding to maximaldeflections in the first and in the second oscillation forms of the first mode (k = 1) Fig 7 (b)shows graphs of rotation angles (maximal values) of rods-inclusions and elements of thesupporting rod
Fig 7 (b) shows (for the first oscillation mode k = 1) that the first oscillation form (lowfrequency) corresponds to ldquoconcomitantrdquo (in one and the same direction) rotations of inclusionsand the elements of the supporting rod (Fig 8 (a)) while the second oscillation form (higherfrequency) corresponds to ldquocounterrdquo (in opposite directions) rotations (Fig 8 (b))
In the case of ldquocounterrdquo rotations characterized by higher frequencies the entire system hasstronger stiffness than during ldquoconcomitantrdquo motions (with lower frequencies) Calculations fork = 1 show (as can be seen in Fig 7 as well as in the graphs in Fig 6 at k = 1) that if maximal
12
(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

(a) (b)
Figure 8 ldquoConcomitantrdquo (in one and the same direction) rotations (a) and ldquocounterrdquo (inopposite directions) rotations (b) of inclusions and the elements of the supporting rod
rotations of the end inclusions are equal to 5 then the maximal value of deflection (in the middleof supporting rod) reaches 5 cm in the first form and only 2 mm (with the opposite sign) in thesecond form
At that as Fig 6 shows for other modes (with increasing k) low frequency motions in thefirst form (ldquoconcomitantrdquo motions) are characterized by the inclusion rotations prevailing overthe deflections while high frequency motions in the second form (ldquocounterrdquo rotations) dominateover the inclusion rotations
224 Vibrations in a fluid-flow (gas-flow) The same model of the supplied beam wasconsidered in view of eqns (223) in the case when fy = 0 and m = 0 but
min = gϕincl (239)
with the coefficient g At g gt 0 the moment min tends to increase the angular deviation ofinclusions and at g lt 0 it tends to decrease the angular deviation
The condition (239) could be interpreted as the influence of a homogeneous gas- or fluid-flowwith constant velocity v and mass density ρlowast impinging on inclusions equipped with wingletsturned towards the flow (g gt 0) or along the flow (g lt 0) At small angular deviations ϕincl ofinclusions the quantity g may be set to a constant
g = cρlowastv2 (240)
where c is an aerodynamic constant with the same sign as gThe same approach as in the case of free vibrations leads us to a new expression for the
discriminantD(p) = (JEJcross)
2 p8 + 2JEJcross (KJ minus ρC) p6+
+[(ρC minus KJ)2 minus 2ρJEJcross (K minus g)
]p4+
+ [2ρ (K minus g) (ρC + KJ) + 4ρJKg] p2 + ρ2 (K minus g)2(241)
and expressions for frequencies
ω21 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)minus
radicD(p)
2ρJ
ω22 =
JEJcrossp4+(ρC+KJ)p2+ρ(Kminusg)+
radicD(p)
2ρJ
(242)
(the case g = 0 coincides with free vibrations)The calculation of the similar ldquoantenna typerdquo construction in the gas-flow shows the
dependence of squared frequencies on g and k (Fig 9 Fig 10)In all cases the negative value of a squared frequency leads to the phenomenon of ldquodivergencerdquo
exponential one-way deviation of the system (instead of oscillation)
13
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22
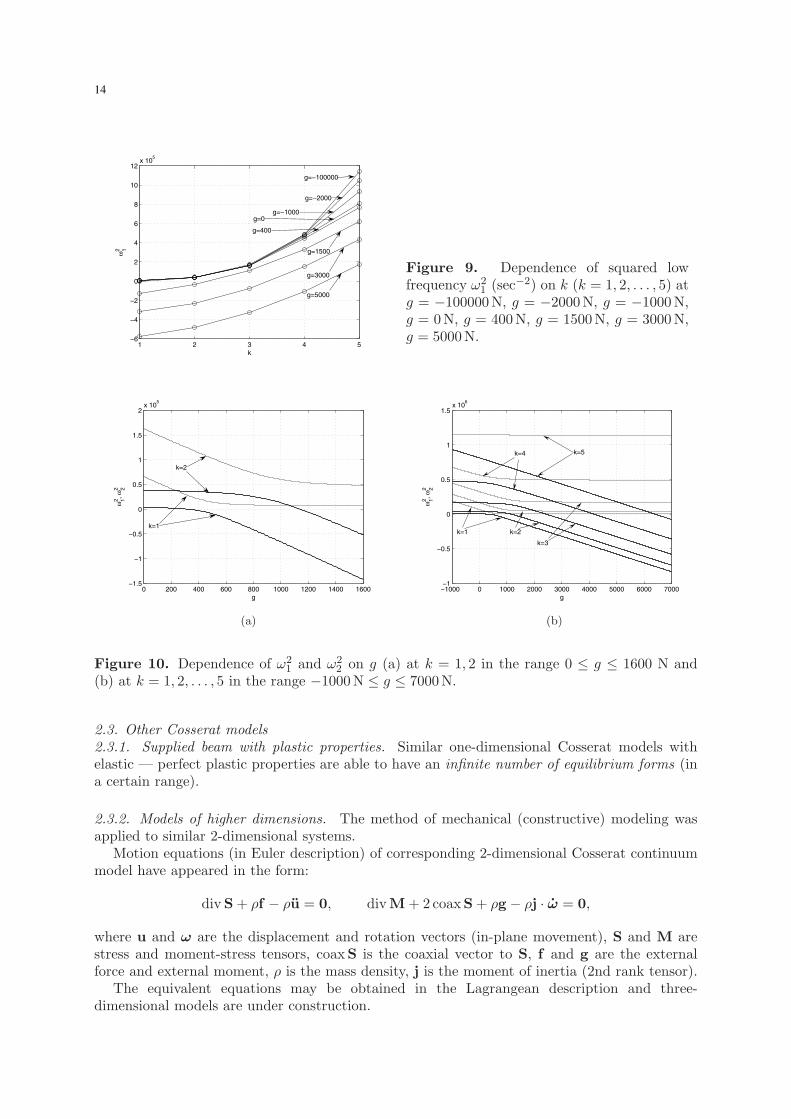
1 2 3 4 5minus6
minus4
minus2
0
2
4
6
8
10
12x 10
5
k
ω12
g=minus100000
g=0g=minus1000
g=minus2000
g=5000
g=3000
g=1500
g=400
Figure 9 Dependence of squared lowfrequency ω2
1 (secminus2) on k (k = 1 2 5) atg = minus100000 N g = minus2000 N g = minus1000 Ng = 0 N g = 400 N g = 1500 N g = 3000 Ng = 5000 N
0 200 400 600 800 1000 1200 1400 1600minus15
minus1
minus05
0
05
1
15
2x 10
5
g
ω12 ω
22
k=1
k=2
minus1000 0 1000 2000 3000 4000 5000 6000 7000minus1
minus05
0
05
1
15x 10
6
g
ω12 ω
22
k=1 k=2
k=3
k=4 k=5
(a) (b)
Figure 10 Dependence of ω21 and ω2
2 on g (a) at k = 1 2 in the range 0 le g le 1600 N and(b) at k = 1 2 5 in the range minus1000 N le g le 7000 N
23 Other Cosserat models231 Supplied beam with plastic properties Similar one-dimensional Cosserat models withelastic mdash perfect plastic properties are able to have an infinite number of equilibrium forms (ina certain range)
232 Models of higher dimensions The method of mechanical (constructive) modeling wasapplied to similar 2-dimensional systems
Motion equations (in Euler description) of corresponding 2-dimensional Cosserat continuummodel have appeared in the form
divS + ρf minus ρu = 0 divM + 2 coaxS + ρg minus ρj middot ω = 0
where u and ω are the displacement and rotation vectors (in-plane movement) S and M arestress and moment-stress tensors coaxS is the coaxial vector to S f and g are the externalforce and external moment ρ is the mass density j is the moment of inertia (2nd rank tensor)
The equivalent equations may be obtained in the Lagrangean description and three-dimensional models are under construction
14
24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

24 Closing remarkThus building Cosserat continuum models from appropriate discrete structures through theindicated method of mechanical (constructive) modeling
bull on the one hand immediately clarifies the mechanical sense of all Cosserat characteristics
bull on the other hand demonstrates the principal availability for real existence (naturally orartificially) of Cosserat type continua and drops a hint at possible ways for their technologicalmanufacture
3 Saturated porous mediaUsing the method of mechanical modeling a new model of saturated porous media was builtin the framework of the hypothesis of interpenetrative continua In contrast to Biotrsquos theoryit is able to circumscribe deformations of a skeleton at arbitrary strains (in the Lagrangeandescription) and arbitrary motions of the fluid (gas) through the skeleton (in the Euleriandescription) The model is characterized by specific volume values (regulated with continuityequations) of solid (skeleton) and liquid (fluid) components by mixed type of constitutiveequations of the components and by specific force (and moment) interactions between thecomponents
31 Equations of the model311 General form of equations In a simple case of two-phase saturated porous media(with an incompressible material of skeleton and compressible or incompressible fluid) at smallskeleton deformations the system of equations is
mdash motion equations of solid and fluid components
divσs + gs + fs = ρspart2
partt2us (31)
divσf + gf + ff = ρfdvf
dt (32)
mdash mass conservation equations for fluid and solid components
part
parttρf + div (ρfvf) = 0 m = m0 + (1 minus m0)div us (33)
mdash constitutive equations for the pair of components
σs = minus(1 minus m)ppI + λsdivusI + 2microssymnablaus (34)
σf = minusmppI + λfdiv vfI + 2microfsymnablavf (35)
mdash expressions of effective mass densities ρs of solid and ρf of fluid phases with the truedensities ρsm and ρfm of their materials
ρs = (1 minus m)ρsm (36)
ρf = mρfm (37)
mdash and the state equation of the fluid expressing the dependence between true pore pressurepp and true mass density (for compressible fluid)
pp = ϕf(ρfm) (38)
15
or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

or the incompressibility condition (for an incompressible fluid)
ρfm = ρfm0 equiv const (39)
Here the known quantities are external body-forces (volume densities) gs gf initial porositym0 effective characteristics of the skeleton elasticity λs micros and fluid viscosity λf microf and theconstant density ρsm of the solid material
The unknown functions are the effective stress tensors of the skeleton σs and the fluid phaseσf the displacement vector us of the solid phase and the velocity vector vf of the fluid phaseporosity m effective mass densities ρs of the skeleton and ρf of the fluid true porous pressurepp and true fluid mass density ρfm
Hence the equations (31)-(39) (for compressible fluid) form a system of 23 equations for 23unknown ldquoscalarrdquo functions Initial and boundary conditions must be included in the formulationof the value boundary problem
312 Equations in terms of displacement and velocity vectors For the case of constant λs microsλf microf substituting the stress tensors from the constitutive equations (34) (35) in the motionequations (31) (32) and eliminating the effective densities ρs and ρf using (36) (37) thesystem (31)-(39) can be rewritten in the form of Lame type (for a compressible fluid)
minusgrad ((1 minus m)pp) + (λs + micros) grad divus + micros∆us+
+(1 minus m)ρsm gs + fs = (1 minus m)ρsmpart2us
partt2
minusgrad (mpp) + (λf + microf) grad divvf + microf∆vf+
+mρfm gf minus fs = mρfmdvf
dt
m = m0 + (1 minus m0) divuspart(mρfm)
partt+ div(mρfmvf) = 0
pp = ϕf(ρfm)
(310)
For an incompressible fluid the last equation of (310) should be replaced by the incompressibilitycondition (39) (with ρfm0 given as data)
The system (310) consists of 2 vector and 3 scalar equations for 2 unknown vector functionsus vf and 3 unknown scalar functions m pp ρfm (9 ldquoscalarrdquo equations for 9 unknown ldquoscalarrdquofunctions)
The system (310) is nonlinear It does not belong to a classic type but it coincides withclassic equations in special simple cases
Remark In both general and Lame type systems the vector fs is the interactive (volume-density) body-force from the fluid on the skeleton and vector ff is the reaction force for atwo-phase system fs = minusff
Interactive forces should be determined by constitutive relations
32 Interactive forcesThe detailed analysis of interactive forces permits representation of the interactive force f (forexample f equiv fs) as the sum of static and dynamic components
f = fstat + fdyn (311)
wherefstat = minusppgradm (312)
The dynamic component fdyn should be analyzed using the material objectivity principle andmeasurement theory methods
16
321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

321 Frame-invariancy of dynamic interactive forces Abbreviate fdyn as f Suppose that f is a function of velocities and accelerations of fluid and skeleton phases
f = p(vf vswf ws) (313)
Using the material objectivity principle we obtain the following result
Theorem 1 The general reduced form of a dynamic interactive force (313) is expressed by theequation
f = p(vr vr)v0r (314)
where vr is the magnitude of the relative velocity vr = vf minus vs v0r = vrvr is the unit vector
along the relative velocity vr = wr middot v0r is the derivative of vr by time (equal to the projection of
the acceleration vector along the relative velocity direction) and p is a material scalar function
Remark The problem of invariance properties of inertial interactive forces was formulated andstudied in [5556] In [55] a simple direct approach to the problem was formulated and partiallystudied The approach of [56] is more complicated it is addressed to the more general casewith and gives the solution of the problem in terms of an elegantly introduced class of objectiverelative accelerations specified by a coefficient named as constitutive (subject to be determined)Here in theorem 1 we get the complete solution of the simple formulation of the problem [55]with the result immediately in terms of usual relative accelerations (and velocities) without anyadditional coefficients
322 Analysis by the methods of measurement theory Let the magnitude f equiv |f | of a(dynamic) interactive force f be a function
f = p(ρ v d m micro w) (315)
where ρ equiv ρf is the fluid density v equiv vr is the magnitude of the relative velocity d is the typicalsize of the porous structure m is the porosity micro is the coefficient of viscosity of the fluid andw equiv vr is a collinear relative acceleration
Owing to the π-theorem [9] we obtain
p(ρ v d m micro w) equiv ρv2
dϕ
(m
1
Re1
B
) (316)
where Re = ρvdmicro
equiv vdν
is the Reynolds number (ν is the kinematic viscosity) B = v2
wdis a new
dimensionless parameterSuppose ϕ from (316) is a linear function of its two last arguments
ϕ
(m
1
Re1
B
)equiv ϕF(m) + ϕD(m)
1
Re+ ϕB(m)
1
B
with dimensionless coefficients ϕF (m) ϕD (m) ϕB (m) depending on porosity mThus the magnitude of the dynamic interactive force is
f = fF + fD + fB (317)
wherefF = ρv2
dϕF (m) equiv ρϕF (m) v2
d
fD = ρv2
dϕD (m) 1
Re equiv ρϕD (m) νvd2
fB = ρv2
dϕB (m) 1
B equiv ρϕB (m) w
(318)
The items fF fD fB may be interpreted respectively as dynamic forces of
17
bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

bull frontal resistance (dynamic velocity pressure)
bull viscous resistance (Darcy law)
bull inertial resistance (of Biot added mass type)
As a result for arbitrary motions the vector of dynamic interactive force has the form
f = fF + fD + fB equivequiv
(c0 (ρf m d) vr + d0 (m d microf ) + b0 (ρf m) vr
vr
)vr
(319)
where the coefficients
c0 (ρf m d) =ϕF (m) ρf
d d0 (m d microf ) =
ϕD (m)microf
d2 b0 (ρf m) = ϕB (m) ρf
could be considered in specific cases as constants
323 Estimation of contributions of dynamic forces Comparison of the items in (317)(assuming the same order of the values ϕF(m) ϕD (m) and ϕB (m)) leads to a family ofapproximations to the dynamic force f in different dynamical regimes (see table 1)
Table 1 Comparative contributions of the dynamic forces
Re 1 Re sim 1 Re 1
B 1 0 + fD + fB 0 + 0 + fB 0 + 0 + fB
B sim 1 0 + fD + 0 fF + fD + fB fF + 0 + fB
B 1 0 + fD + 0 fF + fD + 0 fF + 0 + 0
33 ConclusionThe nonlinearity of the equations ((31)-(310)) the presence of static ((311) (312)) andspecial forms for dynamic ((314) (319)) interaction forces show the essential difference ofthe proposed model from the classic ones The expression of inertial resistance force ((318)-(319)) demonstrates the principal distinctions from Biot added mass force in the general case(within the domain of applicability of Biotrsquos model) it coincides with Biotrsquos force in the case ofcollinearity of relative velocity and relative acceleration vectors (one-dimensional motions) andclarifies in this case the sense of added mass density of Biotrsquos model as an inertial resistancecharacteristic
Table 1 may be used to simplify the interactive force (indicated in the table) for differentpractical calculations
4 Compound internal interactionsAs a generalization of the previous considerations let us consider compound interactionsconsisting of body forces f and moments M
T = (f M)
18
41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

41 Interactions in solid two-phase mediaLet the two-phase medium be formed from elastic components (denoted by indices (1) and (2))Let T be a function
T = ϕ(urA
(1)A(2))
(41)
where ur is the vector of mutual displacement of phases A(1) and A(2) are the deformationgradients (affinors) of each phase (relatively to a reference configuration)
Theorem 2 The general reduced form of compound internal interactions (41) in solid two-phase media is as follows
f = Q(1) middot ϕf
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))
M = Q(1) middot ΦM
(Q(1)T middot urX
(1)X(2)Q(1)T middot Q(2))middot Q(1)T
(42)
where Q(i) X(i) are the orthogonal and symmetric parts of the polar decomposition of affinorA(i) namely A(i) = Q(i) middot X(i) (i = 1 2) and ϕf ΦM are material functions
In the case of small strains the relations (42) are reduced to the form
f = ψf
(ur ε
(1) ε(2) ω(2) minus ω(1))
M = ΨM
(ur ε
(1) ε(2) ω(2) minus ω(1))
(43)
where ε(i) ω(i) are the linear strain and rotation tensors
42 Compound interactions in two-phase porous saturated mediaConsider a saturated porous medium with elastic skeleton ((s) mdash skeleton (f) mdash fluid) Let
T = ϕ(vrwrD
(f)D(s)A(s))
(44)
where vr and wr are the relative velocity and acceleration D(f) and D(s) are the stretchingtensors of the fluid and the skeleton and A(s) is the deformation gradient of the skeleton
The principle of material objectivity is satisfied if the constitutive relation (44) has the form
T = Q(s) bull ϕ(Q(s)T middot vrwr middot vr
Q(s)T middot Ωr middot Q(s)Q(s)T middot V(f) middot Q(s) E(s)
E(s))
(45)
where Q(s) is the orthogonal part of polar decomposition of the affinor A(s) Ωr = Ω(f) minusΩ(s) isthe relative spin tensor V(f) is the strain rate tensor of the fluid phase E
(s) is the Green strain
tensor of the skeleton and the notation Q bull T equiv Q bull (f M) =(Q middot f Q middot M middot QT
)is used
Using the methods of [68] one can see that the simplified version of (44) in the form
T = ϕ (vrwr middot vrΩr) (46)
satisfies (45) if interactive actions have the form
f = avr + bΩr middot vr + cΩr2 middot vr + dε Ωr (47)
M = AΩr + B skw (vr otimes Ωr middot vr) + C skw(vr otimes Ωr
2 middot vr
)+ Dε middot vr (48)
19
where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

where a b c d A B C D are scalar functions of the scalar product wr middot vr and mutualinvariants of vr and Ωr and ε is the LevindashCivita tensor
The relations (47) and (48) mean in particular the possibility for the appearance of frontresistance force lifting (shifting) force as well as overturning and rotating (ldquoscrewrdquo) momentsexerted by the fluid on the skeleton
This work supported by the Russian Foundation for Basic Research (project 06-01-00565 andproject 06-01-10832)
References[1] Noll W 1958 A mathematical theory of the mechanical behavior of continuous media Arch Rat Mech Anal
2 197-226[2] Truesdell C A and Noll W 1965 The Nonlinear Field Theories of Mechanics (Enciclopedia of Physics vol
III3) (Springer-Verlag) (Second Edition 1992 Third Edition 2004)[3] Truesdell C A 1972 A First Course in Rational Continuum Mechanics (Baltimore Maryland The Johns
Hopkins University)[4] Sedov L I 1962 Introduction to Continuum Mechanics (Moscow Fizmatgiz)[5] Mandel J 1966 Cours de Mecanique des mileux continus (vol I II) (Paris Gautier-Villars) (Reprint 1994)[6] Eringen A C 1967 Mechanics of Continua (New York Wiley)[7] Sedov L I 1973 Continuum Mechanics (Moscow Nauka)[8] Germain P 1973 Course de Mecanique des Millieux Continus Theorie Generale (Paris Masson et C)[9] Sedov L I 1977 Methods of Similarity and Measurements in Mechanics (Moscow Nauka)
[10] Ilyushin A A 1990 Continuum Mechanics (Moscow Moscow University Press)[11] Mueller I 1984 Thermodynamics (Boston Pitman)[12] Silhavy M 1997 The Mechanics and Thermodynamics of Continuous Media (Berlin Springer)[13] Wilmanski K 1998 Thermomechanics of Continua (Berlin Springer)[14] Liu I-Shih 2002 Continuum Mechanics (BerlinndashHeidelbergndashNew York Springer-Verlag)[15] Love A E H 1927 A Treatise on the Mathematical Theory of Elasticity (Cambridge University Press)[16] Novozhilov V V 1948 Foundations of Nonlinear Theory of Elasticity (MoscowndashLeningrad Gostekhizdat)[17] Ilyushin A A 1948 Plasticity Elastic-Plastic Deformations (MoscowndashLeningrad Gostekhizdat)[18] Ilyushin A A 1963 Plasticity Foundations of the General Mathematical Theory (Moscow Academy of Sciences
of the USSR)[19] Hill R 1983 The Mathematical Theory of Plasticity (Oxford)[20] Ilyushin A A and Lensky V S 1959 Strength of Materials (Moscow Fizmatgiz)[21] Bell J F 1973 Mechanics of Solids I (Experimental Foundations of Mechanics of Solids) vol VIa1 ed C
Truesdell (BerlinndashHeidelbergndashNew York Springer-Verlag)[22] Novacki W 1970 Theory of Elasticity (Warsaw Panstwowe Wydawnictwo Naukowe)[23] Lourie A I 1980 Nonlinear Theory of Elasticity (Moscow Nauka)[24] Ciarlet P G 1988 Mathematical Elasticity vol 1 Three-Dimensional Elasticity (Studies in Mathematics and
its Applications vol 20 ed J-L Lions et all) (AmsterdamndashNew YorkndashOxfordndashTokio North-Holland)[25] Antman S S 2005 Nonlinear Problems of Elasticity (NY Springer)[26] Cosserat E and Cosserat F 1909 Theorie des corps deformables (Paris Hermann)[27] Truesdell C and Toupin R A 1960 The Classical Field Theories (Handbuch der Physics vol 31) (Berlin
Springer) 226-793[28] Aero E L and Kuvshinskiy E V 1960 Basic equations of the theory of elasticity for media with rotatory
interactions of particles Fizika tvyordogo tela (Physics of Solids) 2 No 7 1399-409[29] Toupin R A 1962 Elastic materials with couple-stresses Arch Rat Mech Anal 11 No 5 385-414[30] Mindlin R D and Tiersten H F 1962 Effects of couple-stresses in linear elasticity Arch Rat Mech Anal 11
No 5 415-48[31] Palmov V A 1964 Basic equations of the theory of non-symmetric elasticity Prikladnaya Matematika i
Mekhanika (Applied Mathematics and Mechanics) 28 No 3 401-08[32] Green A E 1965 Micro-materials and multipolar continuum mechanics Int J Eng Sci 3 No 5 533-37[33] Lomakin V A 1970 Statistical Problems in Mechanics of Solids (Moscow Nauka)[34] Ilyushin A A and Lomakin V A 1971 Moment theories in mechanics of solids Strength and Plasticity (Moscow
Nauka) pp 54-60[35] Kunin I A 1975 Theory of elastic media with microstructure (Moscow Nauka)[36] Green A E and Naghdi P M 1991 A thermomechanical theory of a Cosserat point with application to
composite materials Q J Mech Appl Math 44 335-55
20
[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

[37] Martynova E D 1993 Evaluation of static and dynamic averaged characteristics of periodic elastic framesElasticity and Anelasticity (Moscow Moscow University Press) pp 155-62
[38] Green A E and Naghdi P M 1995 A unified procedure for construction of theories of deformable media (IClassical continuum physics II Generalized continua) Proc Roy Soc London A 448 No 1934 335-77
[39] Ilyushin A A 1996 Non-symmetry of strain and stress tensors in continuum mechanics Bulletin of MoscowUniversity (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 6-14
[40] Pobedrya B Ye 1996 Elements of structural mechanics of solids Mathematical Modelling of Systems andProcesses vol 4 (Perm Perm State Technical University) pp 66-74
[41] Vanin G A 1999 Gradient theory of elasticity Proceedings of the Russian Academy of Sciences Mechanics ofRigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogo tela) No 1 46-53
[42] Rubin M B 2000 Cosserat Theories Shells Rods and Points (Dordrecht Kluver)[43] Biot M A 1955 J Appl Phys 26 182-85[44] Biot M A 1962 Mechanics of deformation and acoustic propagation in porous media J Appl Phys 33 1482-98[45] Green A E and Naghdi P M 1965 A dynamical theory of interacting continua Int Journ Eng Sci 3 No 2
231-41[46] Nikolayevskiy V N Basniyev K S Gorbunov A T and Zotov G A 1970 Mechanics of Saturated Porous Media
(Moscow)[47] Rakhmatulin Kh A Saatov Ya U Philippov I G and Artykov T U 1974 Waves in Two-Component Media
(Tashkent)[48] Nigmatulin R I 1978 Foundations of Heterogeneous Media Mechanics (Moscow Nauka)[49] Khoroshun L P and Soltanov N S 1984 Thermoelasticity of Two-Component Mixtures (Kiev Naukova Dumka)[50] Nikolayevskiy V N 1984 Mechanics of Porous and Fractured Media (Moscow Nedra)[51] Brovko G L 1998 Model of inhomogeneous fluid-gas saturated media with deformable solid skeleton Bulletin
of Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 45-52[52] Rushchitskiy Ya Ya 1999 Elements of the Theory of Mixtures (Kiev Naukova Dumka)[53] Pogorelov E G 2000 Propagation of Love and Raighly waves in elastic and two-phase media at non-classic
boundary conditions Thesis of Candidate of Physical-Mathematical Sciences (Moscow Lomonosov MoscowState University)
[54] Coussy O 2004 Poromechanics (2nd Edition) (Chichester John Wiley amp Sons)[55] Wilmanski K and Albers Bettina 2000 Two notes on continuous modeling of porous media (A note on
objectivity of momentum sourses in porous materials) Preprint No 579 ISSN 0946 ndash 8633 (BerlinWeierstrass Institute for Applied Analysis and Stochastics)
[56] Wilmanski K 2005 Tortuosity and Objective Relative Accelerations in the Theory of Porous Materials ProcRoy Soc A 461 1533-61
[57] Brovko G L and Ilyushin A A 1993 On one plane model of perforated plates Bulletin of Moscow University(Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 2 83-91
[58] Brovko G L 1990 Material and spatial representations for constitutive relations of deformable mediaPrikladnaya Matematika i Mekhanika (Applied Mathematics and Mechanics) 54 No 5 814-24
[59] Brovko G L 1996 Modeling of inhomogeneous media of complicated structure and Cosserat continuum Bulletinof Moscow University (Vestnik Moskovskogo Universiteta) Ser 1 Mathematics Mechanics No 5 55-63
[60] Brovko G L 2002 On one constructional model of Cosserat continua Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) No 1 75-91
[61] Ivanova O A 2006 A model of one-dimensional Cosserat continuum Elasticity and Anelasticity ed I A KiykoR A Vasin and G L Brovko (Moscow URSS) pp 139-46
[62] Brovko G L and Ivanova O A 2007 Modeling of properties and motions of inhomogeneous one-dimensionalcontinuum with complicated microstructure of Cosserat type Proceedings of the Russian Academy ofSciences Mechanics of Rigid and Solid Bodies (Izvestiya Rossiyskoy Akademii Nauk Mekhanika tvyordogotela) (in print)
[63] Grishayev A G 2005 Effects of cohesion parameters in models of saturated porous media Transactions ofthe Tula University (Izvestiya Tulrsquoskogo Universiteta) Ser Mathematics Mechanics Informatics 11 No 230-39
[64] Grishayev A G 2006 On the modeling of properties of saturated porous media Elasticity and Anelasticity edI A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 124-29
[65] Brovko G L 2005 The principle of material frame-independence and the structure of interactive forcesin heterogeneous media Transactions of the Tula University (Izvestiya Tulrsquoskogo Universiteta) SerMathematics Mechanics Informatics 11 No 2 21-29
[66] Brovko G L 2006 Invariance problems in classic and non-classic models of continua Elasticity and Anelasticityed I A Kiyko R A Vasin and G L Brovko (Moscow URSS) pp 110-23
21
[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22

[67] Popov E P 1986 Theory and Calculations for Flexible Elastic Rods (Moscow Nauka)[68] Spencer A J M 1971 Theory of Invariants (Continuum Physics vol I part III ed A C Eringen) (New Yorkndash
London Academic) pp 239-353
22


















