Continuum Mechanics - University of...
20
1 Continuum Mechanics The magnitude of the vector a is written a . Scalar or dot product of two vectors a • b = a b cos! where ! is the angle between a and b . It follows from this definition that a • b = b • a and a + b ( ) • c = a • c + b • c . Tensor product of two vectors ab ( ) • c = ab • c ( ) and c • ab ( ) = c • a ( ) b . Sometimes written a ! b ( ) • c = ab • c ( ) and c • a ! b ( ) = c • a ( ) b . It follows from this definition that ab ! ba unless a and b are parallel. However a + b ( ) c = ac + bc and ab + c ( ) = ab + ac . Vector or cross product of two vectors c = a ! b = b • " • a in which ! is the permutation pseudotensor (see below). c is perpendicular to both a and b and has magnitude equal to a b sin ! where ! is the angle from a to b looking along c . It follows from this definition that a ! b = "b ! a and a + b ( ) ! c = a ! c + b ! c . Area as a vector The area of each face of the tetrahedron is represented as an outwards pointing vector perpendicular to the face and of
-
Upload
truongmien -
Category
Documents
-
view
225 -
download
0
Transcript of Continuum Mechanics - University of...

1
Continuum Mechanics The magnitude of the vector a is written a .
Scalar or dot product of two vectors
a •b = a b cos! where
! is the angle between
a and
b. It follows
from this definition that a •b = b •a and a + b( )• c = a • c + b • c .
Tensor product of two vectors
ab( )• c = a b • c( ) and c • ab( ) = c •a( )b . Sometimes written
a!b( )• c = a b • c( ) and c • a!b( ) = c •a( )b . It follows from this
definition that ab ! ba unless
a and
b are parallel. However
a + b( )c = ac + bc and a b + c( ) = ab + ac .
Vector or cross product of two vectors
c = a ! b = b • " •a in which ! is the permutation pseudotensor (see
below).
c is perpendicular to both
a and
b and has magnitude equal
to
a b sin! where
! is the angle from
a to
b looking along
c . It
follows from this definition that a ! b = "b ! a and
a + b( )! c = a ! c + b ! c .
Area as a vector
The area of each face of the tetrahedron is represented as an
outwards pointing vector perpendicular to the face and of

2
magnitude equal to the area of the face. Note that in looking along
the area vector 12v ! u we go clockwise from v to u .
The sum of the four areas, treating them as vectors is
12v ! u + 1
2u !w + 1
2w ! v + 1
2u "w( )! v "w( )
= 12v ! u + 1
2u !w + 1
2w ! v + 1
2u ! v " 1
2u !w " 1
2w ! v + 1
2w !w
= 0
since u ! v = "v ! u and w !w = 0 .
This result can be extended to any closed polyhedron by adding
tetrahedra – the vectors of the joing faces just cancel out. If we have
an infinitely large number of infinitely small tetrahedra, we have a
volume bounded by a smooth surface:
dA!V" = 0
in which the vector dA is an element of surface area and !V is the
entire surface enclosing the volume V .
General curvilinear coordinates

3
Basic relationships
r = X x1, x2, x3( )i + Y x1, x2, x3( )j + Z x1, x2, x3( )kg1 = r,1 = !r
!x1= !X
!x1i + !Y
!x1j + !Z
!x1k
g2 = r,2 = !r!x2
= !X
!x2i + !Y
!x2j + !Z
!x2k
g3 = r,3 = !r!x3
= !X
!x3i + !Y
!x3j + !Z
!x3k
gi •g j = ! ji =1 if i = j
= 0 if i ! j
"#$
%$ in which ! j
i is the Kronecker delta.
gi •g j = gij and gi •g j = gij .
g i are the covariant base vectors.
g i are the contravariant base vectors.
The curvilinear coordinates,
x i always have superscripts.
The unit tensor, I = gigi , and a = a • I = I•a for any vector, a .
An element of displacement, !r = ! xigi and ! s = !r gij! xi! x j .
Hence gij are known as the components of the metric tensor.
gikgjk = ! ji
! ijk = ! ji
k = gk • gi, j = "gk , j •g i
g = !123 = !231 = !312 = "!321 = "!213 = "!132 and !ijk = 0 unless
i ! j ! k ! i .
1g
= !123 = !231 = !312 = "!321 = "!213 = "!132 and
! ijk = 0 unless
i ! j ! k ! i .
g = g11g22g33 + g12g23g31 + g13g21g32 ! g13g22g31 ! g11g23g32 ! g12g21g33
g i ! g j = " ijkg k and
gi ! g j = "ijkgk .
v = vigi = v ig i where
vi = gijvj and
v i = g ijv j . The summation
i=1
3
! is
implied.
vi are the covariant components of
v.

4
v i are the contravariant components of
v.
grad! = !! = gi "!"xi
= gi!,i = gi!i!
!v = gi "v"xi
= giv,i = gi v jg
j( ),i= gi v j,ig
j + vjgj,i( ) = gi v j,ig j + vj g j,i •gk( )gk( )
= gi v j,igj # vj$ki
j gk( ) = gi v j,i # vk$ ijk( )g j
= !iv jgig j = v j,i + v
k$kij( )gig j = !iv
jgig j
divv = ! • v = gi • v,i = !ivjgi •g j = !iv
i
curlv = !" v = gi " v,i = !ivjgi " g j = !iv jg
i " g j = !iv j!ijkgk
Two dimensions
!12 = "!21 = g and !11 = !22 = 0 . !ij =1!ij
and
g = g11g22 ! g12g21 .
Stress
The force crossing an element of area !A is given by !F = !A •! .
The element of area is represented by the vector !A whose
direction is normal to the area and whose magnitude is equal to the
area. This is the definition of the stress ! which is a second order
tensor. Vectors are first order tensors and scalars are zeroth order.
Conservation of angular momentum (see below) tells us that the
stress tensor is symmetric, ! = !T
in which the ‘T’ means
transpose.
In curvilinear coordinates:
!F jg j = !Aigi • ! ajgag j( ) = !Ai!a
i" ajg j = !Ai"ijg j
!F j = !Ai"ij
.
In Cartesian coordinates:

5
!Fxi +!Fy j+!Fzk = !Axi +!Ay j+!Azk!" #$ •! xii +! xyij+! xzik +! yx ji +! y jj+! yz jk +! zxki +! zykj+! zkk
!
"
%%%
#
$
&&&
= !Ax! x +!Ay! yx +!Az! zx( )i + !Ax! xy +!Ay! y +!Az! zy( ) j+ !Ax! xz +!Ay! yz +!Az! z( )k
Applications
Conservation of mass
The rate of mass flowing through a stationary closed boundary is
equal to !v • dA"V! where
! is density and
v is fluid velocity. This
must be equal to minus the rate of change of the mass within the
boundary, ! ddt
! dVV"
#
$%&
'(= ! "!
"tdV
V" . Thus using the divergence
theorem, ! !"!tdV
V" = # • "v( )dV
V" . This must apply for any
boundary and therefore
!"!t
+ # • "v( ) = 0 .
In curvilinear coordinates !"!t
+!i "vi( ) = !"!t
+!i"vi + "!iv
i = 0
and in Cartesian coordinates
!"!t
+ !"!x
vx + !"!y
v y + !"!z
vz + " !vx
!x+!v y
!y+ !vz
!z
#
$ %
&
' ( = 0 .
Conservation of momentum
The net force applied by stress to the material across a stationary
closed boundary is dA •!!V" . If the body force per unit mass is p
then the total force applied to the material is dA •!!V" + pdV
V" . If
the only body force is own weight then p = !!gk .
Conservation of momentum applied to the material within the
boundary means that the total force must be equal to
ddt
!vdVV!
"
#$%
&'+ !vv • dA
!V! = !"
!tv + ! "v
!t"#$
%&' dV
V! + "vv • dA
!V! .
Therefore using the divergence theorem
! •" + p( )dVV# = !"
!tv + ! "v
"t$%&
'() dV
V# + ! • !vv( )dV
V# .

6
This must apply for any boundary and therefore
! •" + p = !"!tv + ! "v
"t+! • !vv( )
= !"!t
+ ! "v"t
+! • !v( )v + !v •!v .
Now applying conservation of mass, ! •" + p = ! "v"t
+ v •!v#$%
&'( in
which a = !v!t
+ v •!v is the acceleration vector.
In curvilinear coordinates !i!ij + p j = "a j = " #v j
#t+ vi!iv
j"#$
%&'
and
in Cartesian coordinates
!" x
! x+!# yx
! y+!# zx!z
+ px = $ax = $ !vx!t
+ vx!vx! x
+ vy!vx! y
+ vz!vx!z
!"#
$%&
!# xy
! x+!" y
! y+!# zy!z
+ py = $ay = $!vy!t
+ vx!vy! x
+ vy!vy! y
+ vz!vy!z
!"#
$%&
!# xz
! x+!# yz
! y+!" z
!z+ pz = $az = $ !vz
!t+ vx
!vz! x
+ vy!vz! y
+ vz!vz!z
!"#
$%&.
Conservation of angular momentum
The net moment about the point O caused by stress and body force
is r ! dA •"( )!V# + r ! pdV
V# = $ dA • " ! r( )
!V# $ p ! rdV
V# in which
we have used the scalar triple product and where
r is the ‘lever
arm’. Conservation of angular momentum applied to the material
within the boundary means that this must be equal to
ddt
!r ! vdVV"
#
$%&
'(+ dA • v! r ! v( )
!V"
= !"!tr ! v + !r ! !v
!t#$%
&'( dV
V" + dA • v! r ! v( )
!V"
.
Therefore using the divergence theorem
! " • # $ r( )dVV% ! p $ rdV
V%
= !"!tr $ v + !r $ "v
"t&'(
)*+ dV
V% + " • !v r $ v( )( )dV
V%
.
This must apply for any boundary and therefore
0 = ! • " # r( )+ p # r + !"!tr # v + !r # !v
!t+! • !v r # v( )( ) .

7
Using conservation of mass and conservation of momentum
0 = ! • " # r( )+ p # r $! • !v( )r # v+r # ! •" + p $ !v •!v( )+! • !v r # v( )( )= ! • " # r( )$! •" # r $ !r # v •!v( )+ !v! • r # v( )
.
The term
!!r " v •#v( )+ !v# • r " v( )= !!r •gk"kjmv
i#ivjgm + !vi r •gk"kjmv
jgm( ),i= !!r •gk"kjmv
i#ivjgm + !vigi •g
k"kjmvjgm + !vir • gk"kjmv
jgm( ),i= !!r •gk"kjmv
i#ivjgm + !vi" ijmv
jgm + !vir •gk"kjm#ivjgm
= 0
so that
0 = ! • " # r( )$! •" # r
= gi • " # r( ),i $ gi •",i # r= gi • " # gi( )=! ij" jikg
k
Therefore the stress tensor is symmetric, even in dynamics. Also,
provided that we take the stress tensor as symmetric, there is no
more information to be obtained by taking moments (although it’s
often very useful).
Deformation and strain The position vector of a material point in the initial or reference
configuration is
P X K( ) defined in terms of the curvilinear coordinate
system
X K which are known as the Lagrangian coordinates.
The position vector of the same material point in the deformed condition is
p xk( ) defined in terms of the curvilinear coordinate system
xk (which are
known as the Eulerian coordinates) and time
t .
This leads to the definition of the following vectors:
GK = !P!X K ,
g k = !p!xk ,
CK = !p!X K = !p
!xk
!xk
!X K = g k x k,K and
ck = !P!xk = !P
!X K
!X K
!xk = GK X K,k and hence to the definition of the
symmetric second order tensors with components
GKL = GK • GL ,
gkl = g k • g l ,
CKL = CK • CL = gklxk
,K x l,L and
ckl = ck • c l = GKL X K,k X L
, l .

8
Note that
X K,k x k
,L = !LK and
xk,K X K
, l = !lk so that if
X K,k and
xk,k are
written as matrices, one is the inverse of the other.
xk,k is the deformation
gradient and
X K,k is the inverse deformation gradient.
CKL are the components of the Green deformation tensor,
ckl , are the
components of the Cauchy deformation tensor,
EKL = ELK = 12
CKL !GKL( ) are the components of the Lagrangian strain
tensor and
ekl = elk = 12
gkl ! ckl( ) are the components of the Eulerian
strain tensor. There are also the components of the Piola deformation
tensor
C!1KL
= g kl X K,k X L
, l and the Finger deformation tensor
c!1kl
= GKL xk,K x l
,L .
dS is the distance between two adjacent material points in the reference
configuration and
ds is the distance between the same two material
points in the deformed condition. It follows from the above definitions that
dS2 = GKLdX K dX L = ckldxk dx l and
ds2 = gkldxk dx l = CKLdX K dX L .
There are a number of deformation measures: Cauchy
ds ! dSdS
, Swainger
ds ! dSdS
, Henky
logedsdS
!
" #
$
% & , Green
12
dsdS
!
" #
$
% &
2
'1(
) * *
+
, - - and Almansi
12
1! dSds
"
# $
%
& '
2(
) * *
+
, - - . Note that for small strain, when
dsdS
= 1+ ! as
! " 0 , all
the measures give the same result.
The Green deformation measure can be expressed as
12
dsdS
!"#
$%&2
'1(
)*
+
,- =
gkl ' ckl( )dxkdxl2cmndx
mdxn= ekldx
kdxl
2gmndxmdxn
=CKL 'GKL( )dXKdXL
2GMNdXMdXN = EKLdX
KdXL
2GMNdXMdXN
.
Fixed Cartesian coordinate system
Let us consider a fixed Cartesian system in which
G11 = G22 = G33 = g11 = g22 = g33 = 1 and
G12 = G23 = G31 = g12 = g23 = g31 = 0 . Also
CKL = x1,K x1
,L + x2,K x2
,L + x3,K x3
,L so that the Green deformation
measure becomes

9
x1,K x1,L + x
2,K x
2,L + x
3,K x
3,L( )dXKdXL ! dX1( )2 + dX 2( )2 + dX 2( )2"
#$%
2 dX1( )2 + dX 2( )2 + dX 2( )2"#
$%
.
Convected coordinate system
In a convected coordinate system the coordinates are dragged along with
the material. Hence
X 1 = x1,
X 2 = x2 and
X 3 = x3 and we can
dispense with using both capital and small letters for indices. Also
Ckl = gkl and
ckl = Gkl .
Then dS2 =Gkldxkdxl and ds2 = gkldx
kdxl so that
12
dsdS
!"#
$%&2
'1(
)*
+
,- =
! kldxkdxl
Gmndxmdxn
in which the componets of strain are
! kl =12gkl !Gkl( ) .
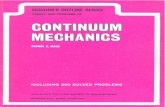
Cylindrical polar coordinates
Basic relationships
r
!
z
x
y
r
r = x1,
! = x2 and
z = x3.
r = x1 cos x2i + sin x2j( ) + x3k
g1 = cos x2i + sin x2j,
g2 = x1 !sin x2i + cos x2j( ) and
g3 = k .
g1 = cos x2i + sin x2j,
g2 =!sin x2i + cos x2j( )
x1 and
g3 = k .

10
g11 = 1,
g22 = x1( )2,
g33 = 1, and
gij = 0 if
i ! j .
g11 = 1,
g22 = 1
x1( )2 ,
g33 = 1 and
g ij = 0 if
i ! j .
g = x1( )2
g1,1 = 0
g1,2 = g2,1 = ! sin x2i + cos x2 j
g2,2 = !x1 cos x2i + sin x2 j( )g3,i = gi,3 = 0
All ! ijk = 0 except !22
1 = "x1 and !122 = !21
2 =1x1
.
Static equilibrium
!i!ij =! ij
,i +!kj"ki
i +! ik"kij = 0 if no body forces.
! 11,1 +!
21,2 +!
31,3 +
! 11
x1! x1! 22 = 0
! 12,1 +!
22,2 +!
32,3 + 3
! 12
x1= 0
! 13,1 +!
23,2 +!
33,3 = 0
where
! r =g11g11
! 11 =! 11
!" =g22g22
! 22 = x1( )2! 22 = r2! 22
! z =g33g33
! 33 =! 33
! r" =g11g22
# 12 = x1# 12 = r# 12
!"z =g22g33
# 23 = x1# 23 = r# 23
! zr =g33g11
# 31 =# 31
so that

11
!"r!r
+ 1r!#$r!$
+ !# zr!z
+ " r % "$r
= 0
!#r$!r
+1r!"$!$
+!# z$!z
+2r#r$ = 0
!#rz!r
+!#$z!$
+!" z!z
= 0
x
y
! r!"
#r"
Note stresses !z , !"z and !zr not shown on diagram.
Small strain elasticity of initially unstressed
body
Statics
!i!ij = 0 if no body forces.
Small strains
! ij = 12 gik! jv
k + gjk!ivk( ) = 1
2 !iv j +! jvi( ) where vi are
displacements.
Stress-strain relationships
!U = 12
!U!" ij
+ !U!" ji
!
"#$
%&!! ij ="
ij !! ij
! ij = 12
"U"# ij
+ "U"# ji
!
"#$
%& where U is the strain energy per unit volume.
Linear elasticity
U = 12Cpqmn! pq! mn
C pqmn = Cqpmn = Cmnpq

12
The components of stress, ! ij , are defined by the relationship
!U =" ij!# ij in which !U is the increment in strain energy
corresponding to the strain increments !" ij
!U = 12Cijmn!" ij" mn +
12Cijmn" ij!" mn
= 12Cijmn!" ij" mn +
12Cmnij" mn!" ij
= 12Cijmn +Cmnij( )! mn"! ij
= Cijmn! mn( )!" ij
Alternatively we can write
! ij = 12
"U"# ij
+ "U"# ji
!
"#$
%&
= 1212Cijmn + 1
2Cmnij + 1
2C jimn + 1
2Cmnji!
"#$%& # mn
= Cijmn# mn
.
In matrix notation
U = 12
! 11 ! 22 ! 33 2! 12 2! 23 2! 31!"
#$
C1111 C1122 C1133 C1112 C1123 C1131
C2211 C2222 C2233 C2212 C2223 C2231
C3311 C3322 C3333 C3312 C3323 C3331
C1211 C1222 C1233 C1212 C1223 C1231
C2311 C2322 C2333 C2312 C2323 C2331
C3111 C3122 C3133 C3112 C3123 C3131
!
"
%%%%%%%%
#
$
&&&&&&&&
! 11! 22! 332! 122! 232! 31
!
"
%%%%%%%%
#
$
&&&&&&&&
! 11
! 22
! 33
! 12
! 23
! 31
!
"
########
$
%
&&&&&&&&
=
C1111 C1122 C1133 C1112 C1123 C1131
C2211 C2222 C2233 C2212 C2223 C2231
C3311 C3322 C3333 C3312 C3323 C3331
C1211 C1222 C1233 C1212 C1223 C1231
C2311 C2322 C2333 C2312 C2323 C2331
C3111 C3122 C3133 C3112 C3123 C3131
!
"
########
$
%
&&&&&&&&
" 11" 22" 332" 122" 232" 31
!
"
########
$
%
&&&&&&&&
in which the square matrix is symmetrical. Therefore there are 21
independent elastic constants.
Isotropic linear elastic material
! = 1E
1+!( )" #! tr "( )I$% &'
! = E1+!( ) " + !
1# 2!tr "( )I$
%&'()

13
The trace, tr !( ) = gmn! mn and I is the unit tensor. E is Young’s
modulus and ν is Poisson’s ratio. These two equations are consistent
since
tr !( ) = 1E
1+!( )" 3!#$ %& tr '( ) = 1" 2!( )E
tr '( )
! = E1+!( )
1E
1+!( )! "! tr !( )I#$ %& +!
1" 2!1" 2!( )E
tr !( )I'()
*+,
= E1+!( )
1E
1+!( )! "! tr !( )I#$ %& +!Etr !( )I'
()*+, = !
In terms of components:
! mn =1E
1+"( )grmgsn !!grsgmn"# $%"rs
! ij = E1+"( )
!1! 2!
gijgmn + gimg jn"#$
%&' " mn
! x = " xx =1E
# x !$ # y +# z( )( ) = 1E 1+!( )! x !" ! x +! y +! z( )( )! y = " yy =
1E
# y !$ # z +# x( )( ) = 1E 1+!( )! y !" ! x +! y +! z( )( )! z = " zz =
1E
# z !$ # x +# y( )( ) = 1E 1+!( )! z !" ! x +! y +! z( )( )! xy = ! yx =
1+"( )! xy
E=! xy
2G
" yz = " zy =1+#( )! yz
E=! yz
2G
" zx = " xz =1+#( )! zx
E=! zx2G
Note the use of mathematical shear strain (one half the enfgineering
shear strain).
The shear modulus, G =E
2 1+ !( ) and the bulk modulus,
K =E
3 1! 2"( ) .
The above expression for stress in terms of strain can be rewritten

14
! ij = 2µgimg jn + "3gijgmn!
"#$%& # mn where ! and µ are the Lamé
parameters. Thus we still have two elastic constants to replace
Young’s modulus and Poisson’s ratio.
Two dimensions
Indices only in the range 1-2.
!i!ij = 0 is satisfied by ! ij = ! im! jn!m!n! = " im! jn !,mn "!,k#mn
k( )
since ! im! jn!m!n!i" = 0 . φ is the Airy stress function.
!im! jn" ij :mn =12 !
im! jn 12 vi: jmn + v j:imn( ) = 0 .
Plane strain
! 23 = ! 31 = ! 33 = 0 .
! ij =E
1 + "( )"
1# 2"gijgmn + gimg jn$
% & ' ( mn still applies but
! mn =1E
1+"( )grmgsn !!grsgmn"# $%"rs is replaced by
! mn =1+"E
grmgsn !"grsgmn( )! rs .
Plane stress
! 23 =! 31 =! 33 = 0 .
! mn =1E
1+"( )grmgsn !!grsgmn"# $%"rs still applies but
! ij = E1+"( )
!1! 2!
gijgmn + gimg jn"#$
%&' " mn is replaced by
! ij = E1+"( )
!1!!
gijgmn + gimg jn"#$
%&' " mn .
Therefore in plane stress

15
! im! jn!m!n" ij =! im! jn
E1+#( )grmgsn "#grsgmn#$ %&!m!n$
rs
= ! im! jn
E1+#( )grigsj "#grsgij( )! rp! sq!p!q!m!n%
= 1E1+#( )! im! jn! rp! sqgrigsj "#!
im! jn! rp! sqgrsgij( )!p!q!m!n%
= 1E1+#( )! im! jn! ir! jsg
rpgsq "#! ji!jn! sr!
sqgrpgim( )!p!q!m!n%
= 1E1+#( )gmpgnq "#gqpgnm( )!p!q!m!n%
so that gijgmn!i! j!m!n! = 0 .
This result applies for both plane stress and plane strain.
Plasticity

16
http://en.wikipedia.org/wiki/Von_Mises_yield_criterion
Tresca yield condition
! I !! II " Y
! II !! III " Y
! III !! I " Y
in which ! I , ! II ! III are the principal stresses and Y
is the yield stress in sumple tension.
von Mises yield condition
23Y 2 = ! I !
! I +! II +! III
3"#$
%&'2
+ ! II !! I +! II +! III
3"#$
%&'2
+ ! III !! I +! II +! III
3"#$
%&'2
= 23! I2 +! II
2 +! III2 ! ! I! II +! II! III +! III! I( )( )
=! I2 +! II
2 +! III2 ! 1
3! I +! II +! III( )2
= 13
! I !! II( )2 + ! II !! III( )2 + ! III !! I( )2()
*+
If ! is the stress tensor,
tr !( ) = gij! ij =! I +! II +! III
tr ! • !( ) = gingjm! ij! mn =! I2 +! II
2 +! III2

17
Hence
tr ! • !( )" 13tr !( )#$ %&
2=! I
2 +! II2 +! III
2 " 13! I +! II +! III( )2 = 2
3Y 2 .
In Cartesian coordinates tr !( ) = gij! ij =" x +" y +" z and
tr ! • !( ) = gingjm! ij! mn =" x2 +" y
2 +" z2 + 2! xy
2 + 2! yz2 + 2! zx
2 .
Hence
tr ! • !( )" 13tr !( )#$ %&
2
=! x2 +! y
2 +! z2 + 2! xy
2 + 2! yz2 + 2! zx
2 " 13! x +! y +! z( )2 = 23Y
2.
Fluid mechanics
Equations of motion
If no body forces,
! •" = ! #v#t
+ v •!v$%&
'()
!i"ij = ! #v j
#t+ vi!iv
j$%&
'()
!! x
!x+!" yx
!y+!" zx!z
= # !vx!t
+ vx!vx!x
+ vy!vx!y
+ vz!vx!z
"#$
%&'
!" xy
!x+!! y
!y+!" zy!z
= #!vy!t
+ vx!vy!x
+ vy!vy!y
+ vz!vy!z
"#$
%&'
!" xz
!x+!" yz
!y+!! z
!z= # !vz
!t+ vx
!vz!x
+ vy!vz!y
+ vz!vz!z
"#$
%&'
Strain rate
! = 12
"v + "v( )T( )! ij =
12
"iv j +" jvi( )

18
! x = " xx =!vx!x
= 12
!vx!x
+ !vx!x
"#$
%&'
! y = " yy =!vy!y
= 12
!vy!y
+!vy!y
"#$
%&'
! z = " zz =!vz!z
= 12
!vz!z
+!vz!z
"#$
%&'
" xy = " yx =12
!vy!x
+ !vx!y
"#$
%&'
" yz = " zy =12
!vz!y
+!vy!z
"#$
%&'
" zx = " xz =12
!vx!z
+!vz!x
"#$
%&'
Vorticity
! = 12
"v # "v( )T( )! ij =
12
"iv j #" jvi( )! k = 1
2" ijk"iv j
! is a small letter omega, ! .
! xy = !! yx =12
"vy"x
! "vx"y
#$%
&'(
! yz = !! zy =12
"vz"y
!"vy"z
#$%
&'(
! zx = !! xz =12
"vx"z
!"vz"x
#$%
&'(
Continuity Equation
!!!t
+ v •"! + !" • v = 0
!!!t
+ vi"i! +"ivi! = 0
!!!t
+ vx!!!x
+ vy!!!y
+ vz!!!z
+ ! !vx!x
+!vy!y
+!vz!z
#$%
&'(= 0
Viscous fluid
! = "pI + 2µ# " 23µtr #( )I
! ij = "gij p + 2µgimg jn" mn "23µgijgmn" mn
! x = "p + 2µ# x "23µ # x + # y + # z( )
! y = "p + 2µ" y "23µ " x + " y + " z( )
! z = "p + 2µ" z "23µ " x + " y + " z( )
! xy = ! yx = 2µ" xy
! yz = ! zy = 2µ" yz
! zx = ! xz = 2µ" zx

19
The trace, tr !( ) = gmn! mn .
Incompressible flow of viscous fluid
gij! ij = !ivi = 0
! ij = !gij p + 2µgimg jn! mn = !gij p + µ g jk"kvi + gik"kv
j( )
!i!ij = !gij"i p + µ g jk!k!iv
i + gik!k!ivj( ) = !gij"i p + µgik!k!iv
j
Therefore the equations of motion are
!gij"i p + µgik"k"ivj = ! #v j
#t+ vi"iv
j$%&
'()
which can also be written
!" j p + µgik"k"iv j = !#vj#t
+ vi"iv j$%&
'()
.
These equations, together with !ivi = 0 are the incompressible
Navier-Stokes equations.
Differentiating,
! jmn!m "! j p + µgik!k!iv j( ) = !" jmn!m
#vj#t
+ vi!iv j$%&
'()
µgik" jmn!m!k!iv j = !" jmn ##t
!mvj( )+!mvi!iv j + v
i!m!iv j$%&
'()
"2µgik!k!i!n = " "2 #!
n
#t+ # jmn!mv
i!iv j " 2vi!i!
n$%&
'()
.
However,
! jmn!mvi!iv j = ! jmn!iv
i!mvj " !jmn!rv
i!svj! imq!rsq
= 0 "!rvj!svj!
rsn +!rvn!svj!
rsj
= 2!rvn" r
so that
!! n
!t+ vi"i!
n = µ!gik"k"i! +"rv
n! r
D#Dt
= µ!"2# +# •"v
.
This is the vorticity transport equation for an incompressible
viscous fluid.

20
Appendix: Green-Gauss divergence theorem
In all the following the coordinate system is assumed to be
stationary – i.e. not convected.
! •F( )dVV" = F • dA
!V" where
F is a vector field,
!V is the surface
forming the boundary of the volume
V . The vector dA is an
element of the boundary in the direction of the outwards pointing
normal. See
http://mathworld.wolfram.com/DivergenceTheorem.html
Cartesian coordinates
!Fx! x
+!Fy! y
+!Fz!z
!"#
$%&dxdydz
V' = FxdAx + FydAy + FzdAz( )
!V'
= Fxdydz + Fydzdx + Fzdxdy( )!V'
Curvilinear coordinates
g j • Figi( ), j dVV! = Figi •g
j dAj!V! so that !iF
i dVV" = Fi dAi
!V" .
Second order tensors
g j • Qikgigk( ), j dVV! = g jdAj( )• Qikgigk( )
!V!
!iQikgk dV
V" = Qikgk dai
!V"
! •QdVV" = dA •Q
!V"