

›Consulting ›Training ›Software
16
Customer References Mock up – iCub ™ M. Arcolin, M. Brivio, G. Cambiaghi, F. Ferlito
Transcript of ›Consulting ›Training ›Software

›Consulting ›Training›Software
Customer ReferencesMock up – iCub ™
M. Arcolin, M. Brivio, G. Cambiaghi, F. Ferlito

›Consulting ›Training ›Software
Contents
›01Company and background
›02Needs
›03Scope of work performed by Parametric Design
›04Result
Team: M. Brivio, F. Ferlito, G . Cambiaghi, M. Arcolin

›Consulting ›Training ›Software
›01Company and backgroundITALIAN INSTITUTE OF TECHNOLOGY (IIT) GENOA
The Italian Institute of Technology is a scientificresearch centre that promotes technologicaldevelopment with the goal of supporting excellence inbasic and applied research and facilitating thedevelopment of the national economic system."Mock-up iCub" is a partnership project, commissionedby the department of robotics.
Scientific areas: robotics, artificial intelligence,computational calculation, neuroscience, new materialsand nanomedicine.
Key Facts (Dec. 2020)
Projects: 385 active, 24 start-ups launched Patents: 1,076 active, 315 inventionsNo. of employees: 1,800 Founded: 2006Locations: Genoa, 11 laboratories at Italian and US campuses https://www.iit.it/it/
›Consulting ›Training ›Software
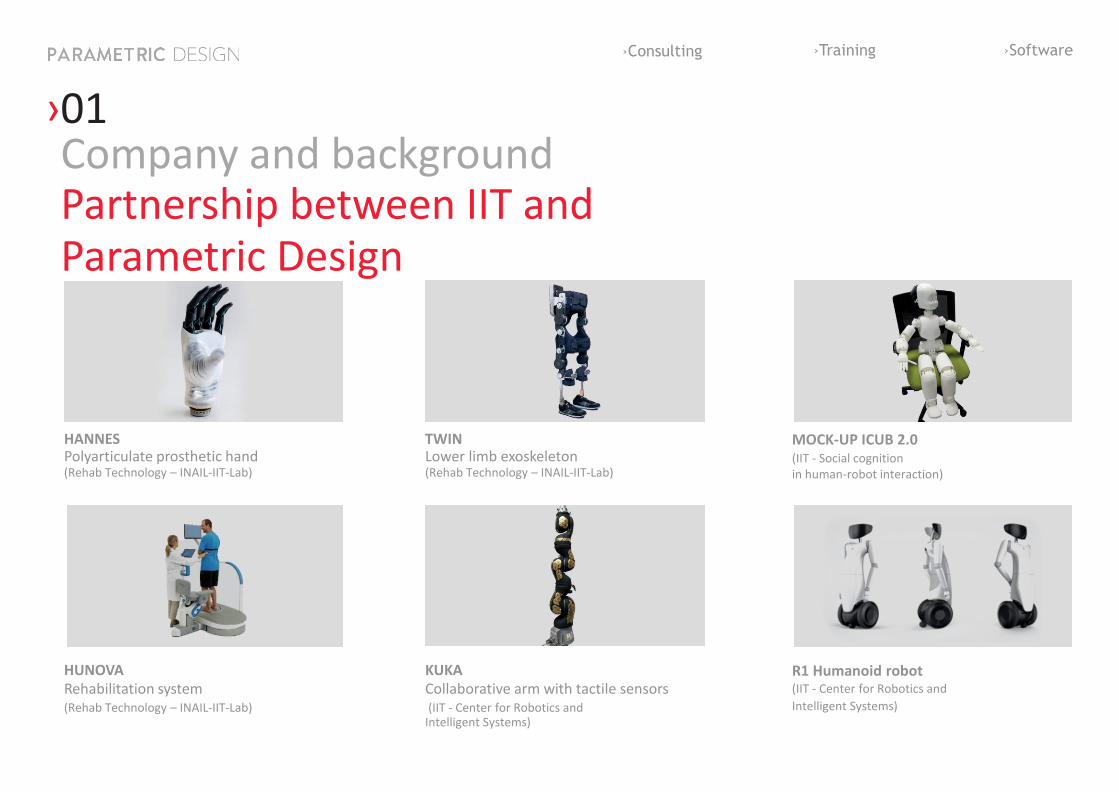
›01Company and backgroundPartnership between IIT and Parametric Design
HANNESPolyarticulate prosthetic hand(Rehab Technology – INAIL-IIT-Lab)
HUNOVARehabilitation system(Rehab Technology – INAIL-IIT-Lab)
TWINLower limb exoskeleton(Rehab Technology – INAIL-IIT-Lab)
KUKACollaborative arm with tactile sensors(IIT - Center for Robotics and
Intelligent Systems)
MOCK-UP ICUB 2.0(IIT - Social cognitionin human-robot interaction)
R1 Humanoid robot(IIT - Center for Robotics and
Intelligent Systems)

›Consulting ›Training ›Software
›01Company and background iCub ™>iCub ™ is a humanoid robot designed to support research into incorporated artificial intelligence (AI).
>At a height of 104 cm, iCub has the dimensions of a five-year-old child. It can crawl on all fours, walk,and sit down to manipulate objects. Its hands are designed to support sophisticated manipulationcapabilities.
>iCub is distributed as an Open Source resource, subject to GPL / LGPL licences, and now boasts aglobal community of enthusiastic developers.
>To date, over 30 robots have been built and are available in laboratories in Europe, the United States,Korea and Japan.
> It is one of the few systems in the world with sensitive skin all over its body, which helps achievesafe physical interaction with the environment.
> IIT coordinates the project and supports the evolution of iCub from today's research system tothe low-cost commercial applications of the near future.

›Consulting ›Training ›Software
›01Company and backgroundThe "Social Cognition in Human-Robot Interaction" Laboratory
The research area explored by the laboratory focuses on interaction between humans and humanoid robots, with the aim of developing robots that can collaborate with humans, assisting them in their daily lives.
In particular, the laboratory aims to enable timelyand comfortable robotic actions in response tohuman intentions and environmental changes.
›Consulting ›Training ›Software
›02Needs
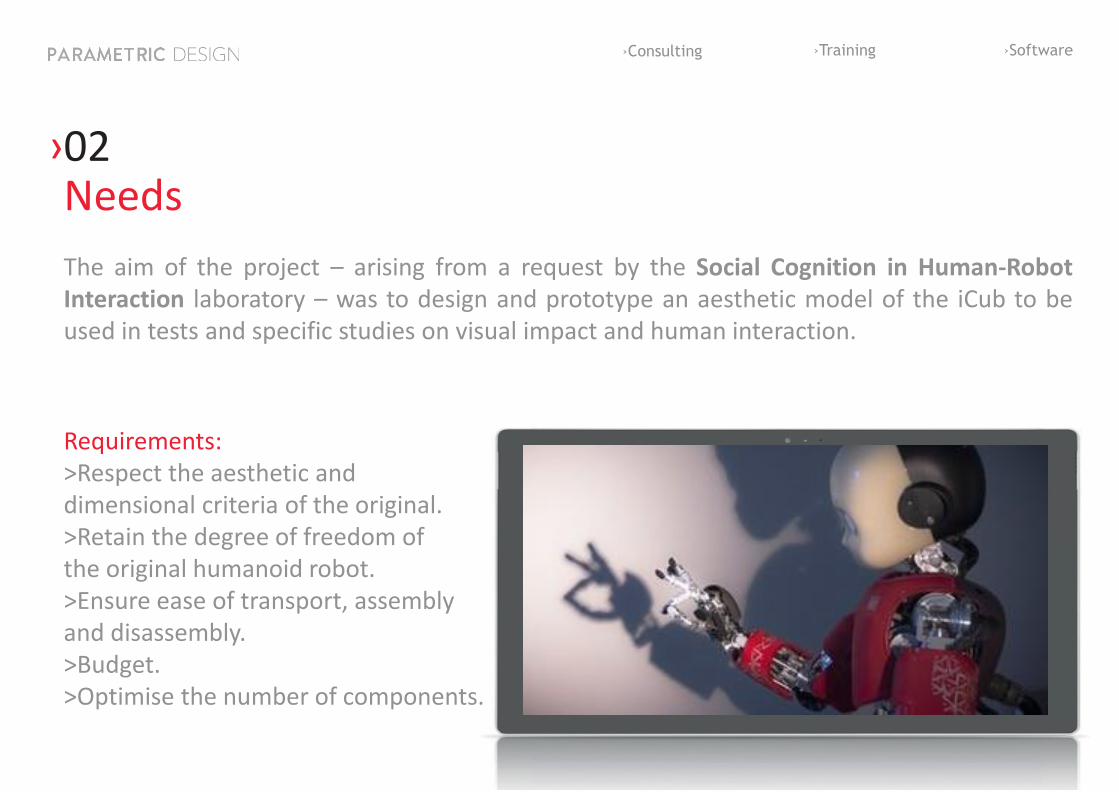
The aim of the project – arising from a request by the Social Cognition in Human-RobotInteraction laboratory – was to design and prototype an aesthetic model of the iCub to beused in tests and specific studies on visual impact and human interaction.
Requirements:>Respect the aesthetic and dimensional criteria of the original.>Retain the degree of freedom of the original humanoid robot.>Ensure ease of transport, assembly and disassembly.>Budget.>Optimise the number of components.

›Consulting ›Training ›Software
›03Scope of work performed by Parametric Design
Analyses performedA study of the skeleton and covers in accordancewith the original dimensions.Analysis of joint movements. Simplification andoptimisation of the number of components, tofacilitate assembly and transport.
Software usedCreo Parametric:MDX - Mechanism Design ExtensionISDX - Interactive Surface Design Extension FMX - Flexible Modelling ExtensionAMX - Additive Manufacturing Extension

›Consulting ›Training ›Software
›03Scope of work performed by Parametric Design Study of skeleton and covers
>A vertical profile was used to support the mock-up, with the addition of a 3D-printedcomponent to secure the upper limbs, covers and head.
>The 3D-printed component was designed in Nylon 12 (PA12), taking into account the jointmeasurements and distances of the original iCub.
> Use of a standard profile and additive manufacturing enabled a reduction inprototype production costs and assembly times.

›Consulting ›Training ›Software
›03Scope of work performed by Parametric Design Study of movement type: ankles
>Articulation of the ankle was recreated to be as close as possible to reality, with a joint that enables rotary movement.
>The spherical part is placed in a housing with adjustment screws to increase or decrease the rigidity of the movement.
>This allows the robot to assume postures that enable better evaluation of human-robot interactions.
›Consulting ›Training ›Software
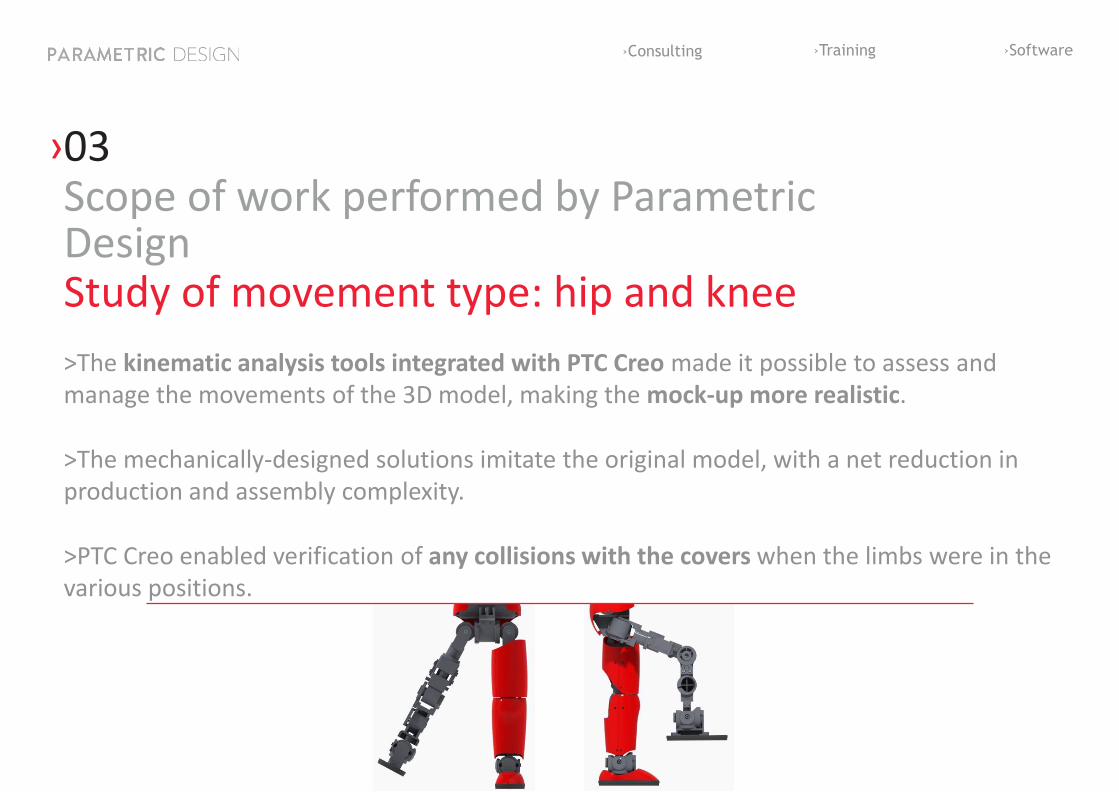
›03Scope of work performed by Parametric Design Study of movement type: hip and knee
>The kinematic analysis tools integrated with PTC Creo made it possible to assess and manage the movements of the 3D model, making the mock-up more realistic.
>The mechanically-designed solutions imitate the original model, with a net reduction in production and assembly complexity.
>PTC Creo enabled verification of any collisions with the covers when the limbs were in the various positions.
›Consulting ›Training ›Software
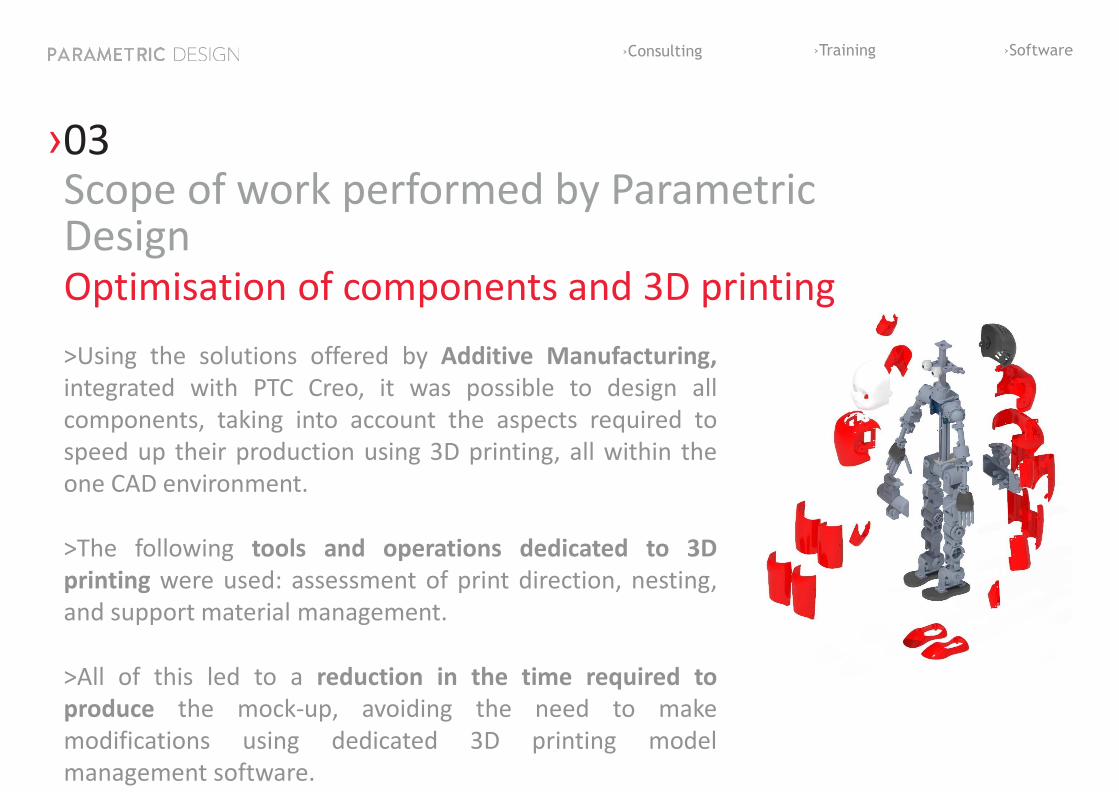
›03Scope of work performed by Parametric Design Optimisation of components and 3D printing
>Using the solutions offered by Additive Manufacturing,integrated with PTC Creo, it was possible to design allcomponents, taking into account the aspects required tospeed up their production using 3D printing, all within theone CAD environment.
>The following tools and operations dedicated to 3Dprinting were used: assessment of print direction, nesting,and support material management.
>All of this led to a reduction in the time required toproduce the mock-up, avoiding the need to makemodifications using dedicated 3D printing modelmanagement software.

›Consulting ›Training ›Software
›04End result
Social impactiCub was chosen as an "interaction trainer" at a neuro-rehabilitation centre for children with autism in Genoa.
The 50 patients, enrolled in a therapy programme, take partin specific sessions with a therapist and iCub, with the aimof developing skills associated with understanding otherpeople's perspectives.
Educational and cultural impactiCub featured in the"Robots" exhibition at the Science Museum, Exhibition Road SW7 2DD London.

›Consulting ›Training ›Software
›04End resultExploring other sectors/companies
Solution SoftwareSectorof application
Rapid prototyping, aesthetic mock-ups
Creo Parametric
> Prototypes for aesthetic use> Commercial presentations> Consumer tests> Exhibitions samples for fairs/museums

›Consulting ›Training ›Software
Thank you!
Swiss operating office: Parametric Design Suisse Sagl Corso San Gottardo 246830 Chiasso (Ch)
+41 91 945 31 40
Italian Operating Offices Parametric Design S.r.l. Piazza Corte Grande 24/25 20060 Gessate (MI)
+39 02 95384199+39 02 95382708


















