Conference Program - ICAPSicaps11.icaps-conference.org/ICAPS-full-program.pdf · Piergiorgio...
36
21st International Conference on Automated Planning and Scheduling Adventium Labs ATRiCS Advanced Traffic Solutions Robert Bosch GmbH European Coordinating Committee for Artificial Intelligence (ECCAI) European Space Agency (ESA) Florida Institute for Human & Machine Cognition SICK AG SIFT Artificial Intelligence Journal David E. Smith Deutsche Forschungs- gemeinschaft (DFG) European Office of Aerospace Research & Development IBM Research Institute for Computational Sustainability (ICS) National ICT Australia Limited National Science Foundation (NSF) TRACLabs Inc. University of Freiburg Conference Program June 11-16, 2011 Freiburg, Germany
Transcript of Conference Program - ICAPSicaps11.icaps-conference.org/ICAPS-full-program.pdf · Piergiorgio...

21st International Conference on Automated Planning and Scheduling
Adventium Labs ATRiCS Advanced Traffic Solutions
Robert Bosch GmbH European Coordinating Committee for Artificial
Intelligence (ECCAI)
European Space Agency (ESA) Florida Institute for Human & Machine Cognition
SICK AG SIFT
Artificial Intelligence Journal
David E. Smith Deutsche Forschungs-gemeinschaft (DFG)
European Office of Aerospace Research &
Development
IBM Research
Institute for Computational
Sustainability (ICS)
National ICT Australia Limited
National Science Foundation (NSF)
TRACLabs Inc. University of Freiburg
Conference ProgramJune 11-16, 2011
Freiburg, Germany
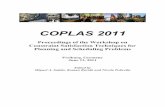
VENUE OF SATELLITE EVENTS
The satellite program (doctorial consortium, workshops and tu-torials) will be hosted at
Building 101Computer Science CampusGeorges-Köhler-Allee 10179110 Freiburg
Map data © OpenStreetMap contributors, CC-BY-SA; rendering rules by Frederik Ramm and Jochen Topf
1
CONTENTS
Organizing CommitteeAwardsInvited SpeakersWorkshopsTutorialsMain Conference ProgramSystem Demonstrations & DC PostersSocial ProgramGeneral InformationSatellite Events at a GlanceMain Conference at a Glance
2346
17212831323334
2
ORGANIZING COMMITTEE
Conference ChairsMalte Helmert (University of Freiburg, Germany)Stefan Edelkamp (University of Bremen, Germany)
Program Chairs Fahiem Bacchus (University of Toronto, Canada)Carmel Domshlak (Technion, Israel)
Local Arrangement Gabriele Röger (University of Freiburg, Germany)
Workshop Chairs Blai Bonet (Universidad Simón Bolívar, Venezuela)Amedeo Cesta (Institute for Cognitive Science and Technology, Italy)
Tutorial Chairs Stephen Smith (Carnegie Mellon University, USA)Rong Zhou (Palo Alto Research Center, USA)
System Demonstration Chairs Piergiorgio Bertoli (Istituto Trentino di Cultura, Italy)Minh Do (Palo Alto Research Center, USA)
Doctoral Consortium ChairsHéctor Geffner (Universitat Pompeu Fabra, Spain)Patrik Haslum (Australian National University, Australia)Subbarao Kambhampati (Arizona State University, USA)
Sponsorship Chairs Jeremy Frank (NASA Ames Research Center, USA)Bernhard Nebel (University of Freiburg, Germany)
Industry Liaisons Ari Jónsson (Reykjavik University, Iceland)Jana Koehler (IBM Research, Switzerland)
LOCAL SUPPORT
kongress & kommunikation gGmbHKatja Lemke
VolunteersYusra AlkhazrajiManuela OrtliebSilvan SieversTiago Stegun Vaquero

3
ICAPS 2011 AWARDS
Best Paper AwardAutomatic Construction of Efficient Multiple Battery Usage PoliciesMaria Fox, Derek Long, Daniele Magazzeni
Best Student Paper AwardPlanning to Perceive: Exploiting Mobility For Robust Object DetectionJavier Velez, Garrett Hemann, Albert S. Huang, Ingmar Posner, Nicholas Roy
Computing All-Pairs Shortest Paths by Leveraging Low TreewidthLéon Planken, Mathijs de Weerdt, Roman van der Krogt(Honorable Mention)
Trade-Offs in Sampling-Based Adversarial PlanningRaghuram Ramanujan, Bart Selman(Honorable Mention)
Influential Paper AwardAlgorithms for Propagating Resource Constraints in AI Planning and Scheduling: Existing Approaches and New ResultsPhilippe Laborie, ECP 2001
Best Dissertation AwardImplicit Abstraction Heuristics for Cost-Optimal PlanningMichael Katz
Effective Search Techniques for Non-Classical Planning via ReformulationJorge Baier(Honorable Mention)
Foundations and Applications of Generalized PlanningSiddharth Srivastava(Honorable Mention)
4
INVITED SPEAKERS
Abstract: Spoken dialog systems present a clas-sic example of planning under uncertainty. In a spoken dialog system, a computer is trying to help a person accomplish something, using spoken language as the communication medi-um. A key challenge is that speech recognition er-rors are ubiquitous and impossible to detect reliably, so the state of the conversation can nev-er be known with certainty. Another challenge is that people do not behave deterministically. Des-pite these challenges, the system must choose actions to make progress to a long term goal. As such, decision theory presents an attractive ap-proach to building spoken dialog systems. Initial work on “toy” dialog systems validated benefits, but also found that straightforward formulations could not scale to real-world problems. Sub-sequent work by a number of research teams has shown how to scale to industrial-scale sys-tems, how to incorporate high-fidelity user simu-lations, and how to synthesize commercial development practices with automatic optimiza-tion. This talk traces the evolution of this applica-
tion of planning under uncertainty, comments on progress toward use in industry, and suggests fu-ture avenues of research relevant to researchers interested in planning under uncertainty.
Bio: Jason Williams is Principal Member of Tech-nical Staff at AT&T Labs – Research. His research interests include spoken dialog systems, plan-ning under uncertainty, spoken language under-standing, and speech recognition. He is on the Scientific Committee of SigDial (the Special In-terest Group on Dialog and Discourse), is an elec-ted member of the IEEE Speech and Language Technical Committee (SLTC), and is on the board of directors of the Association for Voice Interac-tion Design (AVIxD). Jason holds a PhD and Mas-ters in Speech and Language Processing from Cambridge University (UK), and a BSE in Electric-al Engineering from Princeton University (USA). Before joining AT&T Labs, he held positions in in-dustry where he built spoken dialog systems which have since fielded millions of phone calls.
Jason D. WilliamsSpoken Dialog Systems as an Application of Planning under UncertaintyTuesday, June 14, 2011, 09:00–10:00
Abstract: Every year, natural disasters cause infrastructure damages and power outages that have considerable impacts on both quality of life and economic welfare. Mitigating the effects of disasters is an important but challenging task, given the underlying uncertainty, the need for fast response, and the complexity and scale of the infrastructures involved, not to mention the social and policy issues. This talk describes how to use planning and scheduling technologies to address these challenges in a rigorous and principled way. In particular, we present the first optimization solutions to last-mile disaster preparedness and recovery for a single commodity (e.g., water) and for the electrical power network. The optimization algorithms were compared to existing practice on disaster scenarios based on the U.S. infrastructure (at
the state scale) and generated by state-of-the-art hurricane simulation tools. Some of our algorithms are deployed as part of the Los Alamos National Laboratories operational tools and provide recommendations to the U.S. Department of Homeland Security.
Bio: Pascal Van Hentenryck is a Professor of Computer Science at Brown University. He is a fellow of the Association for the Advancement of Artificial Intelligence, the recipient of the 2002 ICS INFORMS award, the 2006 ACP Award, an honorary degree from the University of Louvain, and the Philip J. Bray award for teaching excellence. He is the author of five MIT Press books and most of his research in optimization software systems has been commercialized and is widely used in academia and industry.
Pascal Van HentenryckLast-Mile Disaster Preparedness and RecoveryWednesday, June 15, 2011, 09:00–10:00

5
Abstract: The games agents play – in markets, conflicts, or most other contexts – often defy strict game-theoretic analysis. Games may be un-manageably large (combinatorial or infinite state or action spaces), and present severely imper-fect information, which could be further complic-ated by partial dynamic revelation. Moreover, the game may be specified procedurally, for in-stance by a simulator, rather than in an explicit game form.
With colleagues and students over the past few years, I have been developing a body of tech-niques for strategic analysis, adopting the game-theoretic framework but employing it in domains where direct “model-and-solve” cannot apply. This empirical game-theoretic methodology em-braces simulation, approximation, statistics and learning, and search. Through applications to ca-nonical auction games, and rich trading scenari-os, we demonstrate the value of empirical methods for extending the scope of game-theoret-ic analysis. This perspective also sheds insight in-to behavioral models and bases for predicting joint action in complex multiagent scenarios.
Bio: Michael P. Wellman is Professor of Computer Science & Engineering at the University of Michigan. He received a PhD from the Massachu-setts Institute of Technology in 1988 for his work in qualitative probabilistic reasoning and de-cision-theoretic planning. From 1988 to 1992, Wellman conducted research in these areas at the USAF’s Wright Laboratory. For the past 18+ years, his research has focused on computation-al market mechanisms for distributed decision making and electronic commerce. As Chief Mar-ket Technologist for TradingDynamics, Inc. (now part of Ariba), he designed configurable auction technology for dynamic business-to-business commerce. Wellman previously served as Chair of the ACM Special Interest Group on Electronic Commerce (SIGecom), and as Executive Editor of the Journal of Artificial Intelligence Research. He is a Fellow of the Association for the Advance-ment of Artificial Intelligence and the Association for Computing Machinery.
Michael P. WellmanEmpirical Game-Theoretic Analysis and the Behavior of Software AgentsThursday, June 16, 2011, 09:00–10:00
6
WORKSHOPS
Sunday, June 12, 2011
Monday, June 13, 2011
All workshops are held in building 101 on the computer science campus.
Heuristics for Domain-independent Planning (HDIP)Hall 101-00-026
Goal, Activity and Plan Recognition (GAPRec)Hall 101-01-009/013
Knowledge Engineering for Planning and Scheduling (KEPS)Hall 101-00-036
Monte-Carlo Tree Search: Theory and Applications (MCTS)Hall 101-00-010/014
7
8
10
11
Verification and Validation of Planning and Scheduling Systems(VVPS)Hall 101-01-009/013
Planning and Learning (PAL)Hall 101-00-026
Constraint Satisfaction Techniques for Planning and Scheduling Problems (COPLAS)Hall 101-00-010/014
Scheduling and Planning Applications woRKshop (SPARK)Hall 101-00-036
12
13
14
16

7
Heuristics for Domain-independent Planning(HDIP)
Welcome
Heuristics I
09:00–09:30 Heuristics with Choice Variables: Bridging the Gap between Planning and Graphical Models
Emil Keyder, Miquel Ramirez, Hector Geffner
09:30–10:00 Landmark-Aware Strategies for Hierarchical PlanningMohamed Elkawkagy, Pascal Bercher, Bernd Schattenberg, Susanne Biundo
Coffee Break
08:50–09:00
10:00–10:30 Computing Perfect Heuristics in Polynomial Time: On Bisimulation and Merge-and-Shrink Abstractions in Optimal Planning
Raz Nissim, Jörg Hoffmann, Malte Helmert
Organizers: Alan Fern, Patrik Haslum, Jörg Hoffmann, Michael KatzDate and Location: June 12, 2011, Hall 101-00-026 Computer Science Campus
Heuristics II
11:00–11:30 Incremental Lower Bounds for Additive Cost Planning ProblemsPatrik Haslum, John Slaney, Sylvie Thiebaux
Lunch Break
Search I
14:00–14:30 Living on the Edge: Safe Search with Unsafe HeuristicsErez Karpas, Carmel Domshlak
15:00–15:30 Cost Based Satisficing Search Considered HarmfulWilliam Cushing, J. Benton, Subbarao Kambhampati
Coffee Break
Search II
16:30–17:00 Exploiting Problem Symmetries in State-Based PlannersNir Pochter, Aviv Zohar, Jeffrey Rosenschein
17:00–17:30 On Satisficing Planning with Admissible HeuristicsRoei Bahumi, Carmel Domshlak, Michael Katz
16:00–16:30 Planning with SAT, Admissible Heuristics and A*Jussi Rintanen
11:30–12:30 Invited Talk: Learning Search HeuristicsAlan Fern
14:30–15:00 Enhancing Search for Satisficing Temporal Planning with Objective-driven DecisionsJ. Benton, Patrick Eyerich, Subbarao Kambhampati

8
Poster and Demo Session16:00–17:30
09:15–09:40
Knowledge Engineering for Planning and Scheduling (KEPS)
Welcome
Oral Presentations
A Brief Review of Tools and Methods for Knowledge Engineering for Planning & Scheduling
Tiago Stegun Vaquero, José Reinaldo Silva, J. Christopher Beck
09:40–10:05 Acquisition and Re-use of Plan Evaluation Rationales on Post-DesignTiago Stegun Vaquero, José Reinaldo Silva, J. Christopher Beck
Coffee Break
09:00–09:15
10:05–10:30 The Challenge of Grounding Planning in Simulation in an Interactive Model Development Environment
Bradley J. Clement, Jeremy D. Frank, John M. Chachere, Tristan B. Smith, Keith Swanson
Organizers: Roman Barták, Simone Fratini, Lee McCluskey, Tiago Stegun VaqueroDate and Location: June 12, 2011, Hall 101-00-036 Computer Science Campus
Oral Presentations
12:15–12:40 Heuristic Search-Based Planning for Graph Transformation SystemsH.-Christian Estler, Heike Wehrheim
Lunch Break
Coffee Break
11:25–11:50 Using Planning Domain Features to Facilitate Knowledge EngineeringGerhard Wickler
11:50–12:15 Fluent Merging for Classical Planning ProblemsJendrik Seipp, Malte Helmert
11:00–11:25 Finding Mutual Exclusion Invariants in Temporal Planning DomainsSara Bernardini, David E. Smith
Panel Discussion — Proposal(s) for ICKEPS 201214:00–15:30

9
KEPS DemosAn Interactive Tool for Plan Visualization, Inspection and GenerationAlfonso E. Gerevini, Alessandro Saetti
VisPlan – Interactive Visualisation and Verification of PlansRadoslav Glinský, Roman Barták
An Extended HTN Knowledge Representation Based on a Graphical NotationFrancisco Palao, Juan Fdez-Olivares, Luis Castillo, Oscar García
KEPS PostersCooperated Integration Framework of Production Planning and Scheduling based on Order Life-cycle ManagementShigeru Fujimura
Relational Approach to Knowledge Engineering for POMDP-based Assistance Systems with Encoding of a Psychological ModelMarek Grzes, Jesse Hoey, Shehroz Khan, Alex Mihailidis, Stephen Czarnuch, Dan Jackson, Andrew Monk
JPDL: A Fresh Approach to Planning Domain ModellingMichael Jonas
Open-Ended Domain Model for Continual Forward Search HTN PlanningDominik Off, Jianwei Zhang
Automatic Polytime Reductions of NP Problems into a Fragment of STRIPSAldo Porco, Alejandro Machado, Blai Bonet
Taking Advantage of Domain Knowledge in Optimal Hierarchical Deepening Search PlanningPascal Schmidt, Florent Teichteil-Königsbuch, Patrick Fabiani
A Conceptual Framework for Post-Design Analysis in AI Planning ApplicationsTiago Stegun Vaquero, José Reinaldo Silva, J. Christopher Beck

10
Monte-Carlo Tree Search: Theory and Applications (MCTS)
Welcome
Keynote Speaker
09:15–10:30 Hierarchical Bandits for Sequential Decision MakingRemi Munos
Coffee Break
09:00–09:15
Organizers: Chris Mansley, Alan Fern, Michael Littman, Sergiu GoschinDate and Location: June 12, 2011, Hall 101-00-010/014 Computer Science Campus
11:00–11:30 Repeated-task Canadian Traveler ProblemZahy Bnaya, Ariel Felner, Dror Fried, Solomon Eyal Shimony, Olga Maksin
11:30–12:00 On the Behavior of UCT in Synthetic Search SpacesRaghuram Ramanujan, Ashish Sabharwal, Bart Selman
12:00–12:30 Approaching Bayes-optimality using Monte-Carlo Tree SearchJohn Asmuth, Michael Littman
Lunch Break
14:00–14:30 Guiding Combinatorial Optimization with UCTAshish Sabharwal, Horst Samulowitz
14:30–14:45 Optimistic Planning for Sparsely Stochastic SystemsLucian Busoniu, Remi Munos, Bart De Schutter, Robert Babuska
14:45–15:00 UCT-Treesplit – Parallel MCTS on Distributed MemoryLars Schaefers, Marco Platzner, Ulf Lorenz
Coffee Break
Poster Session15:00–15:30
Poster Session16:00–16:30
Panel Discussion16:30–17:30

11
Goal, Activity and Plan Recognition(GAPRec)
Organizers: Christopher Geib, Derek Long, David PattisonDate and Location: June 12, 2011, Hall 101-01-009/013 Computer Science Campus
09:15–09:40 Corpus-Based Incremental Intention Recognition via Bayesian Network Model Construction
Anh Han The, Luís Moniz Pereira
Welcome
09:40–10:05 Towards a System Architecture for Recognizing Domestic Activity by Leveraging a Naturalistic Human Activity Model
Michele Dominici, Myriam Fréjus, Julien Guibourdenche, Bastien Pietropaoli, Frédéric Weis
Coffee Break
09:00–09:15
10:05–10:30 Accurately Determining Intermediate and Terminal Plan States Using Bayesian Goal Recognition
David Pattison, Derek Long
11:00–11:20 Modeling the Human Operator’s Cognitive Process to Enable Assistant System Decisions
Ruben Strenzke
11:20–11:45 Goal Recognition over POMDPs: Inferring the Intention of a POMDP Agent
Miquel Ramírez, Hector Geffner
12:25–12:30 Wrap up
Panel SessionAre we ready for a plan recognition competition and
what can be learnt from the IPC?
11:45–12:25

12
Planning and Learning (PAL)
Opening Remarks
Parameter and Portfolio Tuning
09:00–09:20 Instance-Based Parameter Tuning and Learning for Evolutionary AI PlanningMatyas Brendel, Marc Schoenauer
09:20–10:00 FD-Autotune: Domain-Specific Configuration using Fast DownwardChris Fawcett, Malte Helmert, Holger Hoos, Erez Karpas, Gabriele Röger, Jendrik Seipp
+ Generating Fast Domain-Specific Planners by
Automatically Configuring a Generic Parameterised PlannerMauro Vallati, Chris Fawcett, Alfonso E. Gerevini, Holger H. Hoos, Alessandro Saetti
Coffee Break
08:55–09:00
10:00–10:20 Fast Downward Stone Soup: A Baseline for Building Planner PortfoliosMalte Helmert, Gabriele Röger, Erez Karpas
Organizers: Sergio Jiménez Celorrio, Erez Karpas, Subbarao KambhampatiDate and Location: June 13, 2011, Hall 101-00-026 Computer Science Campus
Learning for Domains
11:00–11:25 Learning Domain Control Knowledge for TLPlan and BeyondTomas de la Rosa, Sheila McIlraith
11:25–11:50 Efficient Learning of Action Models for PlanningNeville Mehta, Prasad Tadepalli, Alan Fern
11:50–12:15 Reactive, Proactive, and Passive Learning about Incomplete ActionsChristopher Weber, Daniel Bryce
Lunch Break
Innovations in Learning and Planning
14:00–14:25 Planning in Robocup-Soccer NarrativesHannaneh Hajishirzi, Eyal Amir
14:25–14:50 Cost-Based Learning for PlanningSrinivas Nedunuri, William R. Cook, Douglas R. Smith
14:50–15:15 Learning and Application of High-Level Concepts with Conceptual Spaces and PDDLRichard Cubek, Wolfgang Ertel
12:15–12:30 Discussion
10:20–10:30 Discussion
15:15–15:30 Discussion

13
Constraint Satisfaction Techniques for Planning and Scheduling Problems (COPLAS)
Welcome
Scheduling and Resource Allocation
09:05–09:35
A Logic-Based Benders Approach to Scheduling with Alternative Resources and Setup Times
Tony T. Tran, J. Christopher Beck
09:35–10:05
Applying Iterative Flattening Search to the Job Shop Scheduling Problem with Alternative Resources and Sequence Dependent Setup Times
Angelo Oddi, Riccardo Rasconi, Amedeo Cesta, Stephen F. Smith
Coffee Break
09:00–09:05
10:05–10:35
Solving Resource Allocation/Scheduling Problems with Constraint Integer ProgrammingStefan Heinz, J. Christopher Beck
Organizers: Miguel A. Salido, Roman Barták, Nicola Policella Date and Location: June 13, 2011, Hall 101-00-010/014 Computer Science Campus
Planning and SAT
11:00–11:30
Optimization of Partial-Order Plans via MAXSATChristian Muise, Sheila McIlraith, J. Christopher Beck
11:30–12:00
Exploiting MaxSAT for Preference-Based PlanningFarah Juma, Eric Hsu, Sheila McIlraith
12:00–12:30
A SAT Compilation of the Landmark GraphVidal Alcazar, Manuela Veloso
Lunch Break
Modelling and Real-life Problems
14:00–14:30 A Constraint-based Approach for Planning and Scheduling Repeated ActivitiesIrene Barba, Carmelo Del Valle
14:30–15:00 A CFLP Approach for Modeling an Optimization Scheduling ProblemIgnacio Castiñeiras, Fernando Sáenz-Pérez
15:00–15:30 The Distance-Optimal Inter-League Schedule for Japanese Pro BaseballRichard Hoshino, Ken-ichi Kawarabayashi

14
Scheduling and Planning Applications woRKshop (SPARK)
Welcome and Introduction
P&S Under Uncertainty & Execution
10:00–10:15 Planning and Replanning for a Constellation of Agile Earth Observation SatellitesRomain Grasset-Bourdel, Gérard Verfaillie, Antoine Flipo
10:15–10:30 Opening the PANDORA-BOX: Planning and Executing Timelines in a Training Environment
Amedeo Cesta, Gabriella Cortellessa, Riccardo De Benedictis, Keith Strickland
Coffee Break
09:00–09:10
Organizers: Gabriella Cortellessa, Minh Do, Riccardo Rasconi, Neil Yorke-SmithDate and Location: June 13, 2011, Hall 101-00-036 Computer Science Campus
P&S Under Uncertainty & Execution cont'd
11:00–11:25 Dynamic Management of Paratransit Vehicle SchedulesZachary Rubinstein, Stephen Smith
11:25–11:50 The Emergency Landing Planner ExperimentNicolas Meuleau, Christian Neukom, Christian Plaunt, David Smith, Tristan Smith
11:50–12:15 Scheduling a Dynamic Aircraft Repair ShopMaliheh Aramon Bajestani, J. Christopher Beck
Lunch Break
12:15–12:30 Commentary and Discussion
Invited Talk
09:10–10:00 Lessons Learned Empowering Smart Applications with Planning TechnologyLuis Castillo Vidal
Invited TalkLuis Castillo VidalLessons Learned Empowering Smart Applications with Planning Technology
Few people would disagree with the success stories of deploying real world planning applications. In this talk we describe the pitfalls we have found since we founded IActive Intelligent Technologies in 2006. IActive specializes in introducing planning technology into existing applications to give them additional decision support capabilities, with tangible and measurable added value. In this talk we discuss the “good” and “not so good” decisions from IActive's experiences.
Schedule

15
Coffee Break
Emerging Applications for P&S
16:15–16:30 Temporal Optimization Planning for Fleet RepositioningKevin Tierney, Rune Møller Jensen
16:30–16:45 Knowledge Representations for High-level and Low-level PlanningFranziska Zacharias, Christoph Borst
16:00–16:15 The MMP: A Mixed-Initiative Mission Planning System for the Multi-Aircraft DomainRuben Strenzke, Axel Schulte
16:45–17:05 Command and Control Training Centers: Computer Generated Forces Meet Classical Planning
Carmel Domshlak, Ziv Even-Zur, Yannai Golany, Erez Karpas, Yevgeni Nus
17:05–17:15 Commentary and Discussion
Final Discussion and Closing Remarks17:15–17:45
Novel Domains for P&S
14:00–14:25 Diagnosis As Planning: Two Case StudiesPatrik Haslum, Alban Grastien
14:25–14:40 Computing Genome Edit Distances using Domain-Independent PlanningPatrik Haslum
14:40–15:05 Planning for Human-Robot TeamingKartik Talamadupula, Subbarao Kambhampati, Paul Schermerhorn,
J. Benton, Matthias Scheutz
15:05–15:20 Temporal Planning for Co-Design of Host Scheduling and Workflow Allocation in Mobile Environments
Qiang Lu, Yixin Chen, Mart Haitjema, Catalin Roman, Christopher Gill, Guoliang Chen
15:20–15:30 Commentary and Discussion

16
Verification and Validation of Planning and Scheduling Systems (VVPS)
10:00–10:30 Directed Search for Generalized Plans Using Classical PlannersSiddharth Srivastava, Neil Immerman, Shlomo Zilberstein, Tianjiao Zhang
09:00–10:00 Invited Talk: Policy Learning for Autonomous Feature TrackingMaria Fox
Coffee Break
11:00–11:30 Synthesizing and Verifying Plans for Constrained Workflows:Transferring Tools from Formal Methods
Jason Crampton, Michael Huth
Organizers: Saddek Bensalem, Klaus Havelund, Andrea OrlandiniDate and Location: June 13, 2011, Hall 101-01-009/013 Computer Science Campus
11:30–12:00
Predicting Atomicity Violations in Concurrent Programs via PlanningNiloofar Razavi, Azadeh Farzan, Sheila McIlraith
12:00–12:30 A Loop Acceleration Technique to Speed Up Verification of Automatically-Generated Plans
Robert P. Goldman, Michael Pelican, David Musliner
Generating Controllers for Flexible Plan Execution: a TGA ApproachAndrea Orlandini, Alberto Finzi, Amedeo Cesta, Simone Fratini
Lunch Break
14:00–14:30
A Critical Overview and Open Questions for Temporal Planning with UncertaintyRosella Gennari, Anna Roubickova, Marco Roveri
14:30–15:00
Formally Ensuring Time Constraints in a Development ProcessIlias Garnier, Christophe Aussaguès, Vincent David, Guy Vidal-Naquet
15:00–15:30
Coffee Break
Special Session “Darmstadt, we have a problem” –Open Discussion about a Planning Domain
Inspired by an ESA Robotic Mission
16:00–17:30
17
TUTORIALS
Sunday, June 12, 2011
A Survey of Suboptimal Search AlgorithmsJordan Thayer, Wheeler Ruml09:00–10:30, Hall 101-02-016/018
Using Solution Length Estimates in Heuristic SearchJordan Thayer, Wheeler Ruml11:00–12:30, Hall 101-02-016/018
Decision Diagrams in Automated Planning and SchedulingScott Sanner14:00–15:30, Hall 101-02-016/018
Problem Solving with Model Checking TechniquesMichael Weber, Jaco van de Pol16:00–17:30, Hall 101-02-016/018
Monday, June 13, 2011
Translation-based Approaches to Conformant and Contingent PlanningHéctor Palacios, Alexandre Albore09:00–10:30, Hall 101-02-016/018
Petri Nets and their Relation to PlanningBlai Bonet, Patrik Haslum11:00–12:30, Hall 101-02-016/018
Open Source Solutions for Motion PlanningSachin Chitta14:00–15:30, Hall 101-01-016/018
Introduction to Planning Domain Modeling in RDDLScott Sanner16:00-17:30, Hall 101-01-016/018
18
Decision diagrams have proved to be a useful data structure for model checking, temporal veri-fication, graphical model inference, and factored planning (factored MDPs and POMDPs among many applications). This tutorial will cover the foundations of binary and algebraic decision dia-grams (BDDs & ADDs) – their properties, their al-gorithms, their use in various automated planning settings (including a discussion of when other techniques are preferable to de-cision diagrams), and tricks of the trade (vari-able orderings, approximation, and application-specific operations) that help one
achieve maximal efficiency in practice. Beyond BDDs and ADDs, the tutorial will also cover a variety of less-used but important decision dia-grams and their applications: Zero-suppressed DDs (ZDDs) for set representation, Affine ADDs (AADDs) for arithmetic function representation, recent extensions of decision diagrams to con-tinuous variables, and many others (Factor Edge Value BDDs, Binary Moment Diagrams, etc.) as time permits. While focusing on the theory of de-cision diagrams, the tutorial will constantly re-late the theory to practical applications in automated planning and scheduling.
Decision Diagrams in Automated Planning and SchedulingScott Sanner (NICTA & ANU, Australia) Sunday, June 12, 2011, 14:00–15:30, Hall 101-02-016/018
This tutorial provides a survey of heuristic search algorithms, focusing on algorithms that find suboptimal solutions. We will cover al-gorithms that provide quality bounds, beam search algorithms, and anytime search al-gorithms. The commonality between these famil-
ies of algorithms is that they all sacrifice finding optimal solutions in order to find solutions faster. The goal will be to develop an understanding of when the searches are likely to perform well and when they are likely to perform poorly.
A Survey of Suboptimal Search AlgorithmsJordan Thayer and Wheeler Ruml (University of New Hampshire, USA) Sunday, June 12, 2011, 09:00–10:30, Hall 101-02-016/018
Handling g-value plateaus is an open and challen-ging problem for domain independent planning. One promising approach for dealing with these plateaus is to search on multiple objectives, hop-ing that the guidance of one cost metric will pull the search out of plateaus in another. For cost based planning, plan length is a natural candid-
ate for this additional guidance. This tutorial ex-amines how the field of heuristic search has been tackling the problem of using both solution cost and solution length within a single al-gorithm, with a special focus on how algorithms can incorporate solution length without abandon-ing guarantees on solution quality.
Using Solution Length Estimates in Heuristic SearchJordan Thayer and Wheeler Ruml (University of New Hampshire, USA) Sunday, June 12, 2011, 11:00–12:30, Hall 101-02-016/018
19
Abstract:The Model Checking Problem is the question whether a mathematical model (typically of a real-world system) fulfills its specification (often given as a set of logic formulas). Automatic solutions to solve such model checking problems have been researched and refined for close to 30 years now. Since reaching maturity, they have become a standard quality assurance method in, e.g., the semiconductor and aviation industries.In this tutorial, we aim to connect research on model checking and the plethora of techniques it spawned (or incorporated successfully) to strongly related, and sometimes overlapping fields: graph searching, planning, scheduling, artificial intelligence.
Contents:u Introduction to Model Checking: expressing
properties, flavors of models, diagnosticsu Application areas and success stories:
hardware, software, scheduling, puzzle solving, ...
u Conquering the search space: enumerative vs. symbolic methods
u Algorithmic techniques: sequential, directed, multi-core, distributed, and I/O-efficient algorithms (and combinations thereof)
u Symbolic methods: state space compression, binary decision diagrams, translations to SAT problems
u State-of-the-art techniques: CEGAR, bounded model checking, SMT solvers
u Engineering challenges: an explosion of modelling languages and exploration techniques
Problem Solving with Model Checking TechniquesMichael Weber and Jaco van de Pol (University of Twente, Netherlands) Sunday, June 12, 2011, 16:00–17:30, Hall 101-02-016/018
Conformant planning is the problem of finding a sequence of actions for achieving a goal in the presence of uncertainty in the initial state or in action effects. On the other hand, contingent planning is concerned with the problem of achiev-ing goals in the presence of incomplete informa-tion and sensing actions. Both problems have been approached as a path-finding problem in the belief space where good belief representa-tions and heuristics are critical for scaling up. In this tutorial, we present algorithms for both con-formant and contingent planning that rely on translations to classical planning problems, solved by an off-the-shelf classical planner.The first half of this tutorial will be devoted to present translations from conformant planning (i.e., planning with incomplete information and no sensing) into classical planning. Compiled clas-sical problems are solved by a classical planner, taking advantage of heuristics developed for clas-sical planning: as long as heuristics for search-ing in the belief space have not been as successful so far. On top of such a translation was built the T0 conformant planner, best per-former of the conformant track at IPC 2006. These general translation schemes are sound
and we establish the conditions under which such translations are also complete. Thus, we present the notion of conformant width, that characterizes the size of classical translations that are guaranteed to be complete.In the second half of the tutorial, we will focus on how to build efficient action selection mechan-isms for planning with sensing (contingent plan-ning) on top of conformant planning translations. In fact, the ability to find conformant plans is needed in contingent settings where conformant situations constitute a special case. Planning with incomplete information and partial observ-ability is the most complex setting for planning. We will show how to obtain a closed-loop al-gorithm for achieving the goal in planning with sensing, using a conformant translation. Also, we will introduce the notion of contingent width, sim-ilar to the former conformant width, to character-ize contingent planning problems.Finally, building on the same translations, we will show how to obtain robust finite-state control-lers. Finite-state and memoryless controllers are simple action selection mechanisms widely used in domains such as video games and mobile ro-botics. We show how to develop a model-based
Translation-based Approaches to Conformant and Contingent PlanningHéctor Palacios (Universidad Carlos III de Madrid, Spain) and Alexandre Albore (Universitat Pompeu Fabra, Spain) Monday, June 13, 2011, 09:00–10:30, Hall 101-02-016/018

20
Petri nets are a formalism for modelling discrete dynamical systems, widely used in automated verification (model checking). There is a wealth of results and algorithmic techniques for Petri nets, often based on principles quite different from those commonly employed in planning.
This tutorial aims to present the basics of Petri nets, with focus on their relation to modelling formalisms used in planning and the exchange of algorithmic techniques between the two fields.
Petri Nets and their Relation to PlanningBlai Bonet (Universidad Simón Bolívar, Venezuela) and Patrik Haslum (NICTA & ANU, Australia) Monday, June 13, 2011, 11:00–12:30, Hall 101-02-016/018
This tutorial will focus on the application of motion planning for mobile manipulation in unstructured environments. Topics will include the following:u integrating real time sensing with planning to deal with dynamic environmentsu integrating planning and reactive control for mobile manipulationu dealing with kinematic constraintsu plan monitoring and replanning in dynamic environmentsu combining different planning techniquesu application of these techniques to real world problems in object manipulation, door opening, cart
pushing
Open Source Solutions for Motion PlanningSachin Chitta (Willow Garage) Monday, June 13, 2011, 14:00–15:30, Hall 101-01-016/018
method for deriving finite-state controllers auto-matically. In particular, the models represent a class of contingent problems where actions are deterministic and some fluents are observable. The problem of deriving a controller from such models is converted into a conformant planning problem that is solved using classical planners, taking advantage of a complete translation intro-duced before. All algorithms will be illustrated with examples.
We expect the tutorial to be interesting for gener-al AI researchers, as we build on simple ideas that have been successful and that we introduce step by step. We will discuss other similar ap-proaches and their limits, e.g., how a representa-tion affects heuristic search, to put the translations introduced into context.
RDDL is the Relational Dynamic Influence Dia-gram Language, the domain modeling language used in the ICAPS 2011 International Probabilist-ic Planning Competition. RDDL has been de-veloped to compactly model real-world planning problems that use boolean, multi-valued, integer and continuous variables, unrestricted concur-rency, non-fluents, probabilistic independence among complex effects (important for exogen-ous events), aggregation operators in addition to quantifiers, and partial observability. While RDDL addresses some of the probabilistic modeling lim-
itations of PPDDL, its deterministic subset also addresses some modeling limitations of PDDL (e.g., models needing nonlinear difference equa-tions or unrestricted concurrency). This tutorial provides a general introduction to RDDL, its se-mantics, and a number of detailed examples like elevator and traffic control to demonstrate its ex-pressive power. It also provides a brief introduc-tion to the rddlsim software that permits the simulation, evaluation, and visualization of plan-ners and planning domains.
Introduction to Planning Domain Modeling in RDDLScott Sanner (NICTA & ANU, Australia) Monday, June 13, 2011, 16:00–17:30, Hall 101-01-016/018
21
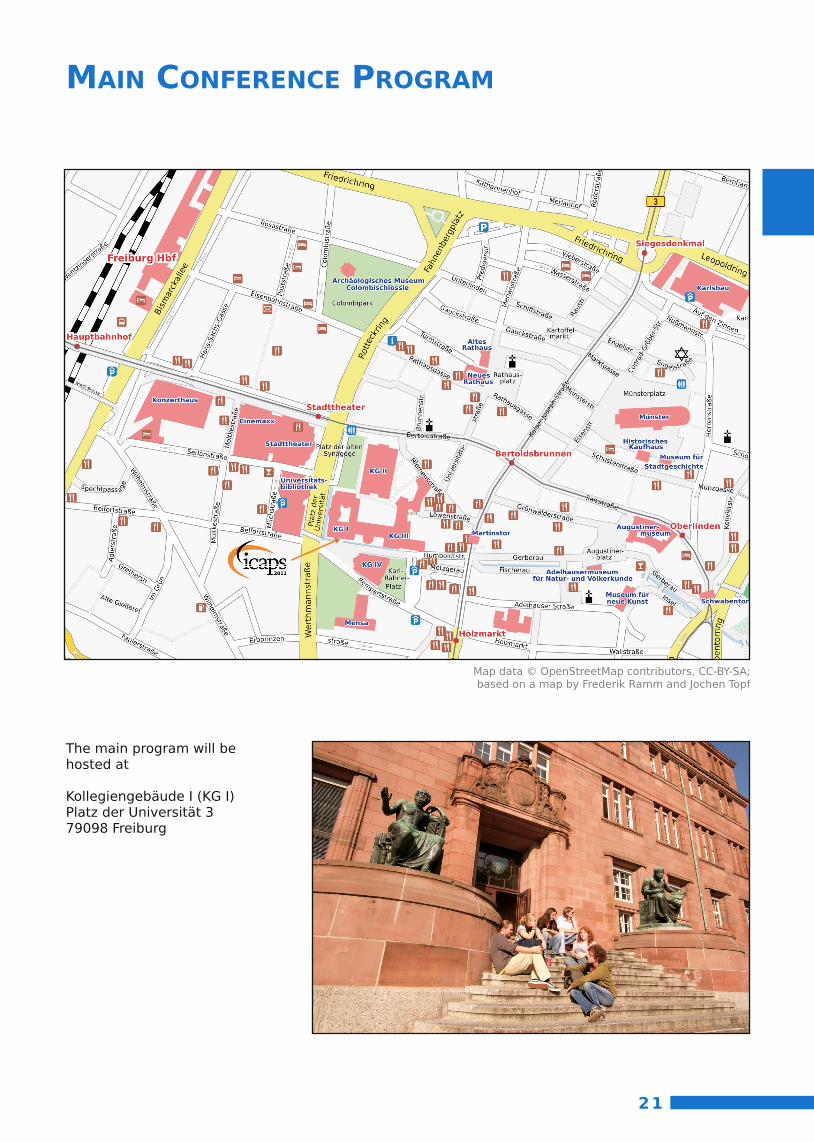
MAIN CONFERENCE PROGRAM
The main program will be hosted at
Kollegiengebäude I (KG I)Platz der Universität 379098 Freiburg
Map data © OpenStreetMap contributors, CC-BY-SA; based on a map by Frederik Ramm and Jochen Topf
22
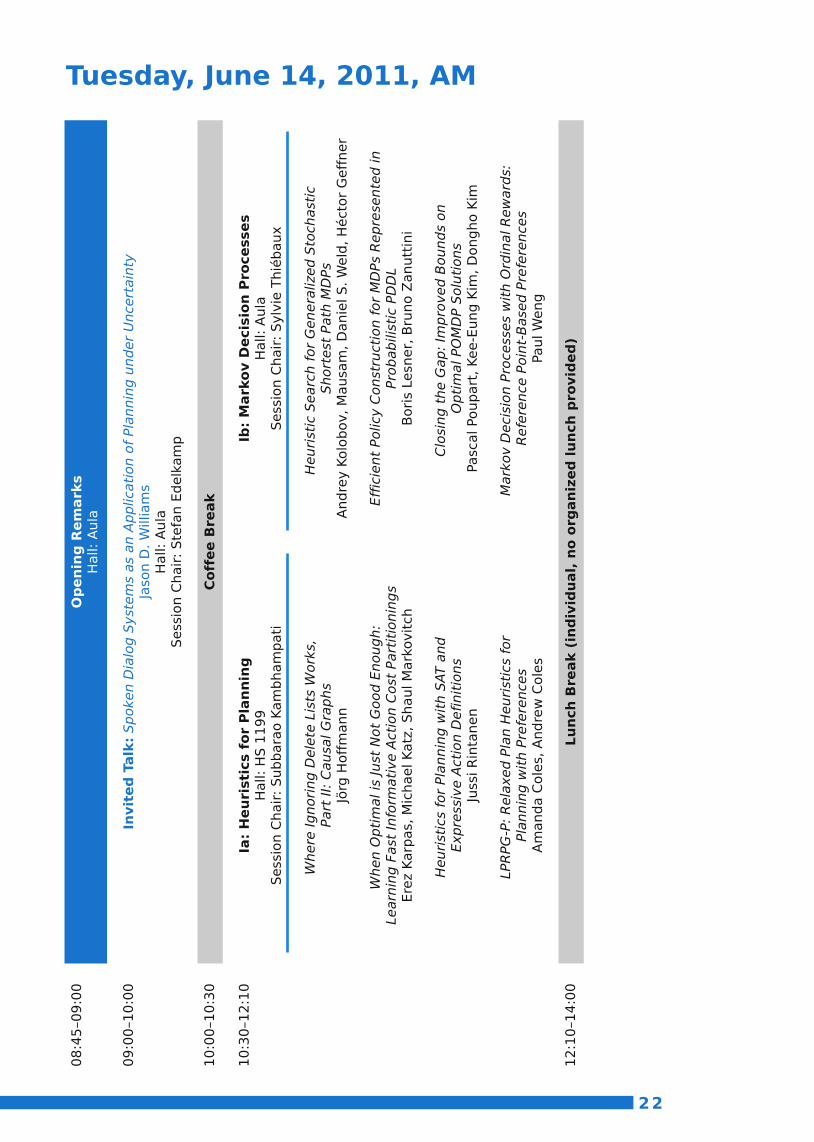
Tuesday, June 14, 2011, AM08
:45–
09:0
0O
peni
ng R
emar
ksHa
ll: A
ula
Ia: H
euri
stic
s fo
r Pl
anni
ngHa
ll: H
S 11
99Se
ssio
n Ch
air:
Subb
arao
Kam
bham
pati
Whe
re Ig
norin
g D
elet
e Li
sts
Wor
ks,
Part
II: C
ausa
l Gra
phs
Jörg
Hof
fman
n
09:0
0–10
:00
Invi
ted
Talk
: Spo
ken
Dia
log
Syst
ems
as a
n Ap
plic
atio
n of
Pla
nnin
g un
der
Unc
erta
inty
Jaso
n D.
Will
iam
sHa
ll: A
ula
Sess
ion
Chai
r: St
efan
Ede
lkam
p
10:0
0–10
:30
Coff
ee B
reak
10:3
0–12
:10
Ib: M
arko
v D
ecis
ion
Proc
esse
sHa
ll: A
ula
Sess
ion
Chai
r: Sy
lvie
Thi
ébau
x
Heu
ristic
Sea
rch
for
Gen
eral
ized
Sto
chas
tic
Shor
test
Pat
h M
DPs
Andr
ey K
olob
ov, M
ausa
m, D
anie
l S. W
eld,
Héc
tor G
effn
er
Whe
n O
ptim
al is
Just
Not
Goo
d En
ough
: Le
arni
ng F
ast
Info
rmat
ive
Actio
n Co
st P
artit
ioni
ngs
Erez
Kar
pas,
Mic
hael
Kat
z, S
haul
Mar
kovi
tch
Effic
ient
Pol
icy
Cons
truc
tion
for
MD
Ps R
epre
sent
ed in
Pr
obab
ilist
ic P
DD
LBo
ris L
esne
r, Br
uno
Zanu
ttini
Heu
ristic
s fo
r Pl
anni
ng w
ith S
AT a
nd
Expr
essi
ve A
ctio
n D
efin
ition
sJu
ssi R
inta
nen
Clos
ing
the
Gap
: Im
prov
ed B
ound
s on
O
ptim
al P
OM
DP
Solu
tions
Pasc
al P
oupa
rt, K
ee-E
ung
Kim
, Don
gho
Kim
LPRP
G-P
: Rel
axed
Pla
n H
euris
tics
for
Plan
ning
with
Pre
fere
nces
Aman
da C
oles
, And
rew
Col
es
Mar
kov
Dec
isio
n Pr
oces
ses
with
Ord
inal
Rew
ards
: Re
fere
nce
Poin
t-Ba
sed
Pref
eren
ces
Paul
Wen
g
12:1
0–14
:00
Lunc
h Br
eak
(ind
ivid
ual,
no o
rgan
ized
lunc
h pr
ovid
ed)
Dyn
amic
Sta
te-S
pace
Par
titio
ning
in
Exte
rnal
-Mem
ory
Gra
ph S
earc
hRo
ng Z
hou,
Eric
A. H
anse
n
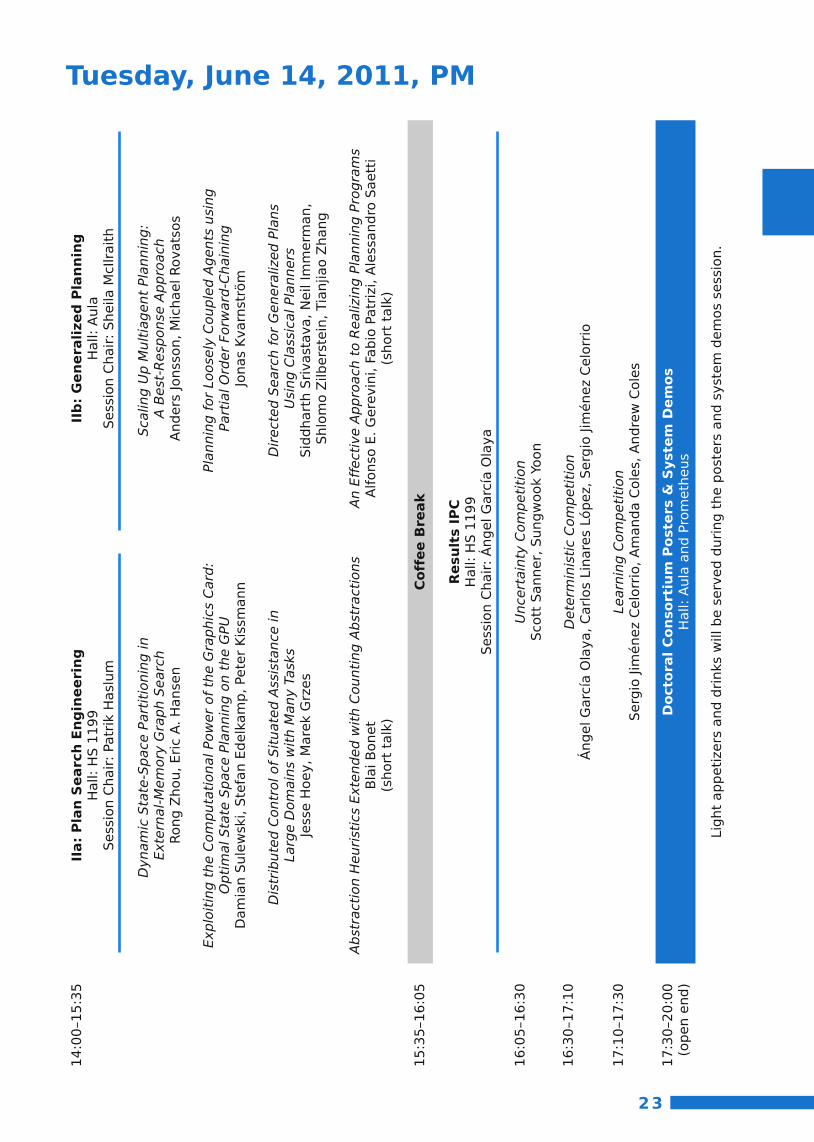
IIb: G
ener
aliz
ed P
lann
ing
Hall:
Aul
aSe
ssio
n Ch
air:
Shei
la M
cIlra
ith
Scal
ing
Up
Mul
tiage
nt P
lann
ing:
A
Best
-Res
pons
e Ap
proa
chAn
ders
Jons
son,
Mic
hael
Rov
atso
s
23
IIa: P
lan
Sear
ch E
ngin
eeri
ngHa
ll: H
S 11
99Se
ssio
n Ch
air:
Patr
ik H
aslu
m
Dyn
amic
Sta
te-S
pace
Par
titio
ning
in
Exte
rnal
-Mem
ory
Gra
ph S
earc
hRo
ng Z
hou,
Eric
A. H
anse
n
14:0
0–15
:35
IIb: G
ener
aliz
ed P
lann
ing
Hall:
Aul
aSe
ssio
n Ch
air:
Shei
la M
cIlra
ith
Scal
ing
Up
Mul
tiage
nt P
lann
ing:
A
Best
-Res
pons
e Ap
proa
chAn
ders
Jons
son,
Mic
hael
Rov
atso
s
Expl
oitin
g th
e Co
mpu
tatio
nal P
ower
of t
he G
raph
ics
Card
: O
ptim
al S
tate
Spa
ce P
lann
ing
on t
he G
PUDa
mia
n Su
lew
ski,
Stef
an E
delk
amp,
Pet
er K
issm
ann
Plan
ning
for
Loos
ely
Coup
led
Agen
ts u
sing
Pa
rtia
l Ord
er F
orw
ard-
Chai
ning
Jona
s Kv
arns
tröm
Dis
trib
uted
Con
trol
of S
ituat
ed A
ssis
tanc
e in
La
rge
Dom
ains
with
Man
y Ta
sks
Jess
e Ho
ey, M
arek
Grz
es
Dire
cted
Sea
rch
for
Gen
eral
ized
Pla
ns
Usi
ng C
lass
ical
Pla
nner
sSi
ddha
rth
Sriv
asta
va, N
eil I
mm
erm
an,
Shlo
mo
Zilb
erst
ein,
Tia
njia
o Zh
ang
Abst
ract
ion
Heu
ristic
s Ex
tend
ed w
ith C
ount
ing
Abst
ract
ions
Blai
Bon
et(s
hort
talk
)
An E
ffect
ive
Appr
oach
to
Real
izin
g Pl
anni
ng P
rogr
ams
Alfo
nso
E. G
erev
ini,
Fabi
o Pa
triz
i, Al
essa
ndro
Sae
tti(s
hort
talk
)
15:3
5–16
:05
Coff
ee B
reak
Resu
lts
IPC
Hall:
HS
1199
Sess
ion
Chai
r: Án
gel G
arcí
a Ol
aya
Det
erm
inis
tic C
ompe
titio
nÁn
gel G
arcí
a Ol
aya,
Car
los
Lina
res
Lópe
z, S
ergi
o Jim
énez
Cel
orrio
16:0
5–16
:30
Unc
erta
inty
Com
petit
ion
Scot
t San
ner,
Sung
woo
k Yo
on
Lear
ning
Com
petit
ion
Serg
io Ji
mén
ez C
elor
rio, A
man
da C
oles
, And
rew
Col
es
17:3
0–20
:00
(ope
n en
d)D
octo
ral C
onso
rtiu
m P
oste
rs &
Sys
tem
Dem
osHa
ll: A
ula
and
Prom
ethe
us
Tuesday, June 14, 2011, PM
Ligh
t app
etiz
ers
and
drin
ks w
ill b
e se
rved
dur
ing
the
post
ers
and
syst
em d
emos
ses
sion
.
17:1
0–17
:30
16:3
0–17
:10
24
09:0
0–10
:00
Invi
ted
Talk
: Las
t-M
ile D
isas
ter
Prep
ared
ness
and
Rec
over
yPa
scal
Van
Hen
tenr
yck
Hall:
Aul
aSe
ssio
n Ch
air:
Fahi
em B
acch
us
10:0
0–10
:30
Coff
ee B
reak
IIIa:
App
licat
ions
IRo
om: H
S 11
99Se
ssio
n Ch
air:
Scot
t San
ner
Cost
-Sen
sitiv
e Co
ncur
rent
Pla
nnin
g un
der
Dur
atio
n U
ncer
tain
ty fo
r Se
rvic
e-Le
vel A
gree
men
tsAm
anda
Col
es, A
ndre
w C
oles
, Alla
n Cl
ark,
Ste
phen
Gilm
ore
10:3
0–12
:10
IIIb:
Fro
ntie
rs in
Pla
nnin
gHa
ll: A
ula
Sess
ion
Chai
r: Da
vid
Smith
Lear
ning
Inad
mis
sibl
e H
euris
tics
durin
g Se
arch
Jord
an T
. Tha
yer,
Aust
in D
ionn
e, W
heel
er R
uml
Onl
ine
Plan
ning
for
a M
ater
ial C
ontr
ol S
yste
m fo
r Li
quid
Cry
stal
Dis
play
Man
ufac
turin
gM
inh
Do, K
azum
ichi
Oka
jima,
Ser
dar U
ckun
, Fu
mio
Has
egaw
a, Y
ukih
iro K
awan
o, K
oji T
anak
a,
Lara
Cra
wfo
rd, Y
ing
Zhan
g, A
ki O
hash
i
Ense
mbl
e M
onte
-Car
lo P
lann
ing:
An
Em
piric
al S
tudy
Alan
Fer
n, P
aul L
ewis
Plan
ning
Mul
ti-M
odal
Tra
nspo
rtat
ion
Prob
lem
sJo
sé E
. Fló
rez,
Álv
aro
Torr
alba
Aria
s de
Rey
na, J
avie
r Gar
cía,
Ca
rlos
Lina
res
Lópe
z, Á
ngel
Gar
cía
Olay
a, D
anie
l Bor
rajo
Effe
ctiv
e H
euris
tics
and
Belie
f Tra
ckin
g fo
r Pl
anni
ng w
ith In
com
plet
e In
form
atio
nAl
exan
dre
Albo
re, M
ique
l Ram
írez,
Héc
tor G
effn
er
A Pa
th P
lann
ing
Algo
rithm
for
an A
UV
Gui
ded
with
Hom
otop
y Cl
asse
sEm
ili H
erna
ndez
, Mar
c Ca
rrera
s, P
ere
Rida
o
Sear
chin
g fo
r Pl
ans
with
Car
eful
ly D
esig
ned
Prob
esNi
r Lip
ovet
zky,
Héc
tor G
effn
er
12:1
0–14
:00
Lunc
h Br
eak
(ind
ivid
ual,
no o
rgan
ized
lunc
h pr
ovid
ed)
Wednesday, June 15, 2011, AM
Auto
mat
ic C
onst
ruct
ion
of E
ffici
ent
Mul
tiple
Bat
tery
Usa
ge P
olic
ies
Mar
ia F
ox, D
erek
Lon
g, D
anie
le M
agaz
zeni
(bes
t pa
per)
25
IV: B
est
Pape
rsHa
ll: A
ula
Sess
ion
Chai
r: M
alte
Hel
mer
t
Auto
mat
ic C
onst
ruct
ion
of E
ffici
ent
Mul
tiple
Bat
tery
Usa
ge P
olic
ies
Mar
ia F
ox, D
erek
Lon
g, D
anie
le M
agaz
zeni
(bes
t pa
per)
14:0
0–15
:40
Com
putin
g Al
l-Pai
rs S
hort
est
Path
s by
Lev
erag
ing
Low
Tre
ewid
thLé
on P
lank
en, M
athi
js d
e W
eerd
t, Ro
man
van
der
Kro
gt(h
onor
able
men
tion
for
best
stu
dent
pap
er)
Trad
e-O
ffs in
Sam
plin
g-Ba
sed
Adve
rsar
ial P
lann
ing
Ragh
uram
Ram
anuj
an, B
art S
elm
an(h
onor
able
men
tion
for
best
stu
dent
pap
er)
Plan
ning
to
Perc
eive
: Exp
loiti
ng M
obili
ty F
or R
obus
t O
bjec
t D
etec
tion
Javi
er V
elez
, Gar
rett
Hem
ann,
Alb
ert S
. Hua
ng, I
ngm
ar P
osne
r, Ni
chol
as R
oy(b
est
stud
ent
pape
r)
15:4
0–16
:10
Coff
ee B
reak
16:1
0–18
:10
Com
mun
ity
Mee
ting
(inc
lude
s Be
st D
isse
rtat
ion
Talk
and
Aw
ards
Cer
emon
y)Ha
ll: A
ula
Sess
ion
Chai
r: Sh
lom
o Zi
lber
stei
n
20:0
0Ba
nque
t
Wednesday, June 15, 2011, PM
26
09:0
0–10
:00
Invi
ted
Talk
: Em
piric
al G
ame-
Theo
retic
Ana
lysi
s an
d th
e Be
havi
or o
f Sof
twar
e Ag
ents
Mic
hael
P. W
ellm
anHa
ll: A
ula
Sess
ion
Chai
r: Ca
rmel
Dom
shla
k
10:0
0–10
:30
Coff
ee B
reak
Va: A
pplic
atio
ns II
Hall:
HS
1199
Sess
ion
Chai
r: M
aria
Fox
Cros
s-D
omai
n Ac
tion-
Mod
el A
cqui
sitio
n fo
r Pl
anni
ng V
ia W
eb S
earc
hHa
nkz
Hank
ui Z
huo,
Qia
ng Y
ang,
Ron
g Pa
n, L
ei L
i
10:3
0–12
:15
Vb: L
imit
s an
d Po
ssib
iliti
esHa
ll: A
ula
Sess
ion
Chai
r: Jö
rg H
offm
ann
Lim
its fo
r Co
mpa
ct R
epre
sent
atio
ns o
f Pla
nsCh
riste
r Bäc
kströ
m, P
eter
Jons
son
Pote
ntia
l Sea
rch:
A B
ound
ed-C
ost
Sear
ch A
lgor
ithm
Roni
Ste
rn, R
ami P
uzis
, Arie
l Fel
ner
Auto
mat
ic P
olyt
ime
Redu
ctio
ns o
f NP
Prob
lem
s in
to a
Fr
agm
ent
of S
TRIP
SAl
do P
orco
, Ale
jand
ro M
acha
do, B
lai B
onet
Visu
al P
rogr
amm
ing
of P
lan
Dyn
amic
s U
sing
Con
stra
ints
and
Lan
dmar
ksJu
lie P
orte
ous,
Jona
than
Teut
enbe
rg,
Davi
d Pi
zzi,
Mar
c Ca
vazz
a
A Co
mpl
ete
Algo
rithm
for
Gen
erat
ing
Land
mar
ksBl
ai B
onet
, Jul
io C
astil
lo(s
hort
talk
)
The
Mul
ti-Ro
und
Bala
nced
Tra
velin
g To
urna
men
t Pr
oble
mRi
char
d Ho
shin
o, K
en-ic
hi K
awar
abay
ashi
A Po
lyno
mia
l All
Out
com
e D
eter
min
izat
ion
for
Prob
abili
stic
Pla
nnin
gTh
omas
Kel
ler,
Patr
ick
Eyer
ich
(sho
rt ta
lk)
Sam
ple-
Base
d Pl
anni
ng fo
r Co
ntin
uous
Act
ion
Mar
kov
Dec
isio
n Pr
oces
ses
Chris
Man
sley
, Ari
Wei
nste
in, M
icha
el L
. Litt
man
(sho
rt ta
lk)
12:1
5–14
:00
Lunc
h Br
eak
(ind
ivid
ual,
no o
rgan
ized
lunc
h pr
ovid
ed)
Thursday, June 16, 2011, AM
Sche
dulin
g an
Airc
raft
Rep
air
Shop
Mal
iheh
Ara
mon
Baj
esta
ni, J
. Chr
isto
pher
Bec
k
VIb:
Inco
mpl
ete
Info
rmat
ion
Hall:
Aul
aSe
ssio
n Ch
air:
Pasc
al P
oupa
rt
Plan
ning
and
Act
ing
in In
com
plet
e D
omai
nsCh
risto
pher
Web
er, D
anie
l Bry
ce
27
VIa:
Aut
omat
ed S
ched
ulin
gHa
ll: H
S 11
99Se
ssio
n Ch
air:
Dani
el B
orra
jo
Sche
dulin
g an
Airc
raft
Rep
air
Shop
Mal
iheh
Ara
mon
Baj
esta
ni, J
. Chr
isto
pher
Bec
k
14:0
0–15
:15
VIb:
Inco
mpl
ete
Info
rmat
ion
Hall:
Aul
aSe
ssio
n Ch
air:
Pasc
al P
oupa
rt
Plan
ning
and
Act
ing
in In
com
plet
e D
omai
nsCh
risto
pher
Web
er, D
anie
l Bry
ce
Scal
able
Sch
edul
ing
for
Har
dwar
e-Ac
cele
rate
d Fu
nctio
nal V
erifi
catio
nM
icha
el D
. Mof
fitt,
Gern
ot E
. Gün
ther
Cont
inge
nt P
lann
ing
as A
ND
/OR
Forw
ard
Sear
ch
with
Dis
junc
tive
Repr
esen
tatio
nSo
n Th
anh
To, T
ran
Cao
Son,
Enr
ico
Pont
elli
Theo
retic
al A
spec
ts o
f Sch
edul
ing
Coup
led-
Task
s in
the
Pr
esen
ce o
f Com
patib
ility
Gra
phGi
lles
Sim
onin
, Rod
olph
e Gi
roud
eau,
Je
an-C
laud
e Kö
nig,
Ben
oit D
artie
s
Gen
eral
ised
Dom
ain
Mod
el A
cqui
sitio
n fr
om A
ctio
n Tr
aces
Step
hen
Cres
swel
l, Pe
ter G
rego
ry
15:1
5–15
:45
Coff
ee B
reak
VIIa
: Rea
l-Tim
e Pl
anni
ngHa
ll: H
S 11
99Se
ssio
n Ch
air:
J. Ch
risto
pher
Bec
k
Part
ial-O
rder
Sup
port
-Lin
k Sc
hedu
ling
Debd
eep
Bane
rjee,
Pat
rik H
aslu
m(s
hort
talk
)
15:4
5–16
:25
VIIb
: App
licat
ions
III
Hall:
Aul
aSe
ssio
n Ch
air:
Gabr
iele
Rög
er
The
Min
imal
See
d Se
t Pr
oble
mAv
itan
Gefe
n, R
onen
I. B
rafm
an(s
hort
talk
)
Fast
Sub
goal
ing
for
Path
findi
ng V
ia R
eal-T
ime
Sear
chCa
rlos
Hern
ánde
z, Jo
rge
A. B
aier
(sho
rt ta
lk)
Plan
ning
Pro
blem
s fo
r So
cial
Rob
ots
Gian
Die
go T
ipal
di, K
ai O
. Arr
as(s
hort
talk
)
16:2
5–16
:30
Clos
ing
Rem
arks
Hall:
Aul
a
Thursday, June 16, 2011, PM
28
FlowOpt: A Set of Tools for Modeling, Optimizing, Analyzing, and Visualizing Production WorkflowsRoman Barták, Martin Cully, Milan Jaška, Ladislav Novák, Vladimír Rovenský, Con Sheahan, Tomáš Skalický, Dang Thanh-Tung
Only Hope remains in the PANDORA’s .jar – Pervasive Use of Planning in a Training EnvironmentGiulio Bernardi, Amedeo Cesta, Luca Coraci, Gabriella Cortellessa, Riccardo De Benedictis, Francois Mohier, Jure Polutnik, Miha Vuk
Command and Control Training Centers: Computer Generated Forces Meet Classical PlanningCarmel Domshlak, Ziv Even-Zur, Yannai Golany, Erez Karpas
Constraint Priorities – a Way to Get an Optimal Timetable Fully Automatically.Three Steps into the Modern Timetable Scheduler - www.school-timetable.euWiesław Dudek
Planning Multi-modal Transportation ProblemsJose E. Florez, Alvaro Torralba, Javier García, Carlos Linares López, Ángel García Olaya, Daniel Borrajo
PLANET: a Planning and Replanning Tool for a Constellation of Agile Earth-observing SatellitesRomain Grasset-Bourdel, Gérard Verfaillie, Antoine Flipo
Building a Domain-Independent Architecture for Planning, Learning and Execution (PELEA)Cesar Guzman, Vidal Alcázar, David Prior, Eva Onaindía, Daniel Borrajo, Juan Fdez-Olivares
Dora, a Robot Exploiting Probabilistic Knowledge under Uncertain Sensing for Efficient Object SearchMarc Hanheide, Charles Gretton, Moritz Göbelbecker
A Path Planning Algorithm for an AUV Guided with Homotopy ClassesEmili Hernandez, Marc Carreras, Pere Ridao
The TorchLight Tool: Analyzing Search Topology Without Running Any SearchJörg Hoffmann
The “DUKC Optimiser” Ship Scheduling SystemElena Kelareva
WindMT: An Integrated System for Failure Detection and Maintenance Scheduling at Wind FarmsAndras Kovacs, Janos Csempesz, Gabor Erdos, David Karnok, Lorinc Kemeny, Laszlo Monostori, Zsolt Janos Viharos
Demonstration of the Emergency Landing PlannerElif Kurklu, Nicolas Meuleau, Christian Neukom, Christian Plaunt, David E. Smith, Tristan Smith
Organizers: Piergiorgio Bertoli, Minh DoDate and Location: June 14, 2011, Prometheus Hall and Aula
The winner of the Best System Demo Award will be determined by a ballot.
SYSTEM DEMONSTRATIONS

29
Scheduling and Planning Interface for Exploration (SPIFe)Mike McCurdy, Arash Aghevli, Alfredo Bencomo
A New Approach to Conformant Planning via Classical PlannersKhoi Nguyen, Vien Tran, Tran Cao Son, Enrico Pontelli
Automatic Polytime Reductions of NP Problems into a Fragment of STRIPSAldo Porco, Alejandro Machado, Blai Bonet
A Visual Programming Interface for Specifying Plan DynamicsJulie Porteous, Jonathan Teutenberg, David Pizzi, Fred Charles, Marc Cavazza
Beyond Calendar Mashups: SELFPLANNER 2.0Ioannis Refanidis, Anastasios Alexiadis, Neil Yorke-Smith
Planning for Agents with Changing GoalsKartik Talamadupula, Paul Schermerhorn, J. Benton, Subbarao Kambhampati, Matthias Scheutz
Scheduling Print Jobs in Lean Document Production (LDP) ToolkitRong Zhou, Sudhendu Rai, Minh Do
DOCTORAL CONSORTIUM POSTERS
Malileh Aramon Bajestani Combining Stochastic Models of Maintenance with Optimization-based Scheduling Decisions
J. BentonPartial Satisfaction Planning: Representations and Solving Methods
Will CushingTemporal Planning
Masood Feyzbakhsh-RankoohUsing a Complete Heuristic Search for State-Space Based Temporal Planning
Avitan GefenModeling Planning Problems using Hypergraphs
Bharat Ranjan KavuluriThe Invariant Class of Problems
Elena KelarevaShip Scheduling with Uncertainty
Andrey KolobovHeuristic Search for Generalized Stochastic Shortest Path MDPs
Fabien LagriffoulA Framework for Hybrid Planning
Alejandro Machado Translating Decision Problems into Planning Tasks
Organizers: Patrik Haslum, Héctor Geffner, Subbarao KambhampatiDate and Location: June 14, 2011, Prometheus Hall and Aula
30
Aldo PorcoAutomatic Polytime Reductions of NP Problems into a Fragment of STRIPS
Maria Viviane de MenezesModel Update for Automated Planning
Gonzalo Milla MillanLearning HTN Planning Domains from Plan Traces
Daniel MorwoodGoal-Directed Knowledge Acquisition
Srinivas NedunuriDominance Relations for Better Plans and Planners
Khoi NguyenConformant Planning via Classical Planners
Léon PlankenSolving and Coordinating the Simple Temporal Problem
Nir PochterPruning Techniques in Search and Planning
Ezequiel QuinteroImproving Plan Execution on Mobile Robots by Learning Action Durations
Inmaculada Sánchez GarzónA Repair-Replanning Strategy for HTN Planning Frameworks
Joris ScharpffDynamic Contracting and Road Blocks
Ruben StrenzkeHuman-Machine Mixed-Initiative Cooperation in Multi-UAV Mission Planning
Kartik TalamadupulaPlanning for Human-Robot Teaming in Open Worlds
Kevin TierneyFleet Repositioning with Temporal Optimization Planning
Son ToOn the Effectiveness of Belief State Representation in Planning under Uncertainty
Mauro VallatiConfiguration and Learning Techniques for Efficient Automated Planning Systems
31
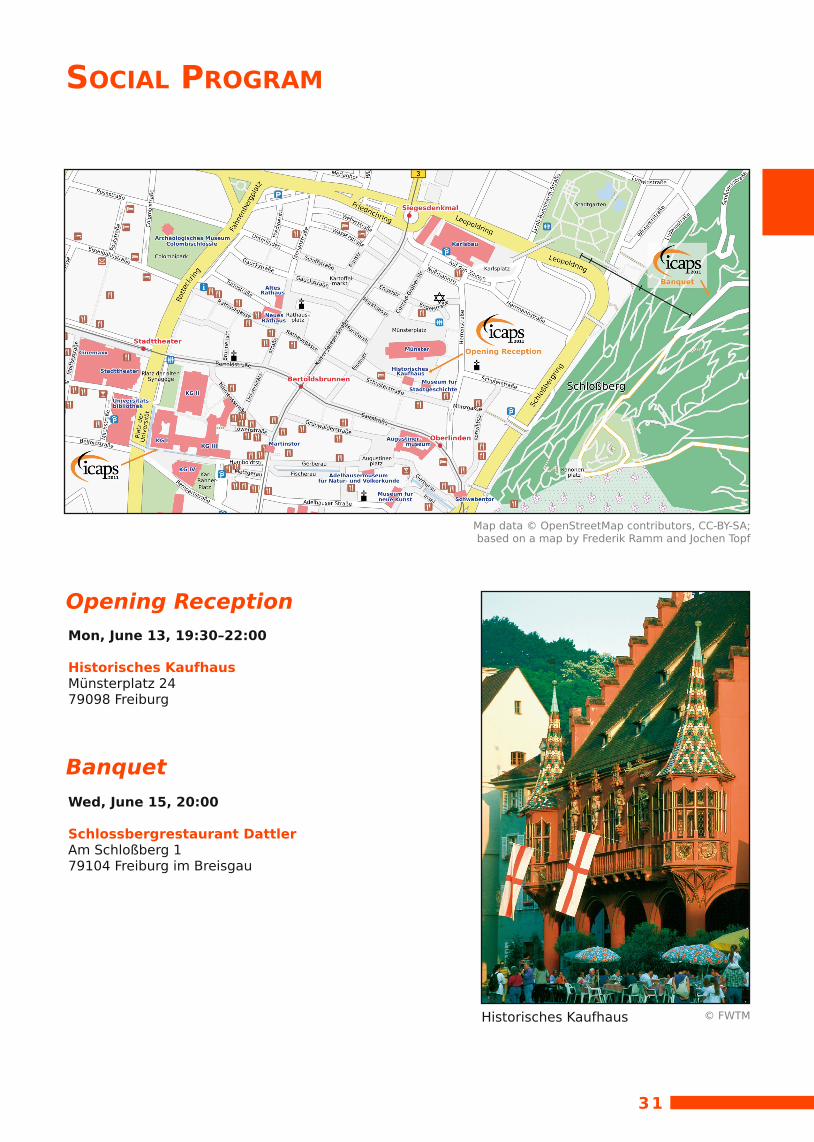
SOCIAL PROGRAM
Map data © OpenStreetMap contributors, CC-BY-SA; based on a map by Frederik Ramm and Jochen Topf
Opening Reception
Banquet
© FWTMHistorisches Kaufhaus
Mon, June 13, 19:30–22:00
Historisches KaufhausMünsterplatz 2479098 Freiburg
Wed, June 15, 20:00
Schlossbergrestaurant DattlerAm Schloßberg 179104 Freiburg im Breisgau

32
Invi
ted
Talk
: Mic
hael
P. W
ellm
anHa
ll: A
ula Vb
: Lim
its
and
Poss
ibili
ties
Hall:
Aul
a
VIb:
In
com
plet
e In
form
atio
nHa
ll: A
ula
VIIb
: Ap
plic
atio
ns
IIIHa
ll: A
ula
Internet AccessWireless internet access is available near the conference halls.
Participants from eduroam institutions can use their usual authentication process to connect toWLANuni-fr (available all over the campus).
Other participants can use the following authentication:Network: ICAPSPassword: omitted in online version
GENERAL INFORMATION
Registration DeskJune 11–13:The registration desk is located in the foyer of building 101 on the computer science campus.Saturday, June 11: 10:00–15:00Sunday and Monday, June 12 and 13: 8:00–18:00
June 14–16:The registration desk is located in the Prometheus hall in front of the Aula in building KG I.Tuesday, June 14: 8:00–20:00Wednesday, June 15: 8:30–18:00Thursday, June 16: 8:30–16:45
OrganizationICAPS 2011 has been organized by the University of Freiburg in cooperation withkongress & kommunikation gGmbH.
We wish to thank the following for their contribution to the success of this conference:
European Office of Aerospace Research and Development,Air Force Office of Scientific Research, United StatesAir Force Research Laboratory (http://www.london.af.mil).
LunchesLunches are included for all conference participants on Sunday and Monday (served in the foyer of building 101 on the computer science campus). For DC participants and mentors, lunch is also included on Saturday (same location). On all other days, lunch is individual (no organized lunch provided) with plenty of options near the conference venue.

ICAPS 2011 SATELLITE EVENTS AT A GLANCE
Coffee Break
HDIP101-00-026
AM 1 KEPS101-00-036
Sunday, June 12
MCTS101-00-010/014
GAPRec101-01-009/013
Tutorial 1101-02-016/018
HDIP101-00-026
AM 2 KEPS101-00-036
MCTS101-00-010/014
GAPRec101-01-009/013
Tutorial 2101-02-016/018
Lunch Break
HDIP101-00-026
PM 1 KEPS101-00-036
MCTS101-00-010/014
Tutorial 3101-02-016/018
HDIP101-00-026
PM 2 KEPS101-00-036
MCTS101-00-010/014
Tutorial 4101-02-016/018
Coffee Break
Coffee Break
PAL101-00-026
AM 1 SPARK101-00-036
COPLAS101-00-010/014
VVPS101-01-009/013
Tutorial 5101-02-016/018
PAL101-00-026
AM 2 SPARK101-00-036
COPLAS101-00-010/014
VVPS101-01-009/013
Tutorial 6101-02-016/018
Lunch Break
PAL101-00-026
PM 1 SPARK101-00-036
COPLAS101-00-010/014
Tutorial 7101-01-016/018
PM 2 SPARK101-00-036
Coffee Break
VVPS101-01-009/013
VVPS101-01-009/013
Monday, June 13
Tutorial 1: A Survey of Suboptimal Search Algorithms (Jordan Thayer and Wheeler Ruml)Tutorial 2: Using Solution Length Estimates in Heuristic Search (Jordan Thayer and Wheeler Ruml)Tutorial 3: Decision Diagrams in Automated Planning and Scheduling (Scott Sanner)Tutorial 4: Problem Solving with Model Checking Techniques (Michael Weber and Jaco van de Pol)
Tutorial 5: Translation-based Approaches to Conformant and Contingent Planning(Héctor Palacios and Alexandre Albore)
Tutorial 6: Petri Nets and their Relation to Planning (Blai Bonet and Patrik Haslum)Tutorial 7: Open Source Solutions for Motion Planning (Sachin Chitta)Tutorial 8: Introduction to Planning Domain Modeling in RDDL (Scott Sanner)
Saturday, June 11Doctoral Consortium
Tutorial 8101-01-016/018
IIa: P
lan
Sear
ch
Engi
neer
ing
Hall:
HS
1199
14:0
0–15
:35
IIb:
Gen
eral
ized
Pl
anni
ngHa
ll: A
ula
15:3
5–16
:05
Coff
ee B
reak
Resu
lts
IPC
Hall:
HS
1199
16:0
5–17
:30
17:3
0–20
:00
(ope
n en
d)D
C Po
ster
s &
Sys
tem
Dem
osHa
ll: A
ula
and
Prom
ethe
us
08:4
5–09
:00
Ope
ning
Rem
arks
Hall:
Aul
a
Ia: H
euri
stic
s fo
r Pl
anni
ngHa
ll: H
S 11
99
09:0
0–10
:00
Invi
ted
Talk
: Jas
on D
. Will
iam
sHa
ll: A
ula
10:0
0–10
:30
Coff
ee B
reak
10:3
0–12
:10
Ib: M
arko
v D
ecis
ion
Proc
esse
sHa
ll: A
ula
12:1
0–14
:00
Lunc
h Br
eak
09:0
0–10
:00
Invi
ted
Talk
: Pas
cal V
an
Hent
enry
ckHa
ll: A
ula
10:0
0–10
:30
Coff
ee B
reak
IIIa:
Ap
plic
atio
ns I
Hall:
HS
1199
10:3
0–12
:10
IIIb:
Fro
ntie
rs
in P
lann
ing
Hall:
Aul
a
12:1
0–14
:00
Lunc
h Br
eak
IV: B
est
Pape
rsHa
ll: A
ula
14:0
0–15
:40
15:4
0–16
:10
Coff
ee B
reak
16:1
0–18
:10
Com
mun
ity
Mee
ting
(inc
lude
s Be
st D
isse
rtat
ion
Talk
and
Awar
ds C
erem
ony)
Hall:
Aul
a
20:0
0Ba
nque
t
09:0
0–10
:00
Invi
ted
Talk
: Mic
hael
P. W
ellm
anHa
ll: A
ula
10:0
0–10
:30
Coff
ee B
reak
Va:
Appl
icat
ions
II
Hall:
HS
1199
10:3
0–12
:15
Vb: L
imit
s an
d Po
ssib
iliti
esHa
ll: A
ula
12:1
5–14
:00
Lunc
h Br
eak
VIa:
Au
tom
ated
Sc
hedu
ling
Hall:
HS
1199
14:0
0–15
:15
VIb:
In
com
plet
e In
form
atio
nHa
ll: A
ula
15:1
5–15
:45
Coff
ee B
reak
VIIa
: Rea
l-Ti
me
Plan
ning
Hall:
HS
1199
15:4
5–16
:25
VIIb
: Ap
plic
atio
ns
IIIHa
ll: A
ula
16:2
5–16
:30
Clos
ing
Rem
arks
Hall:
Aul
a
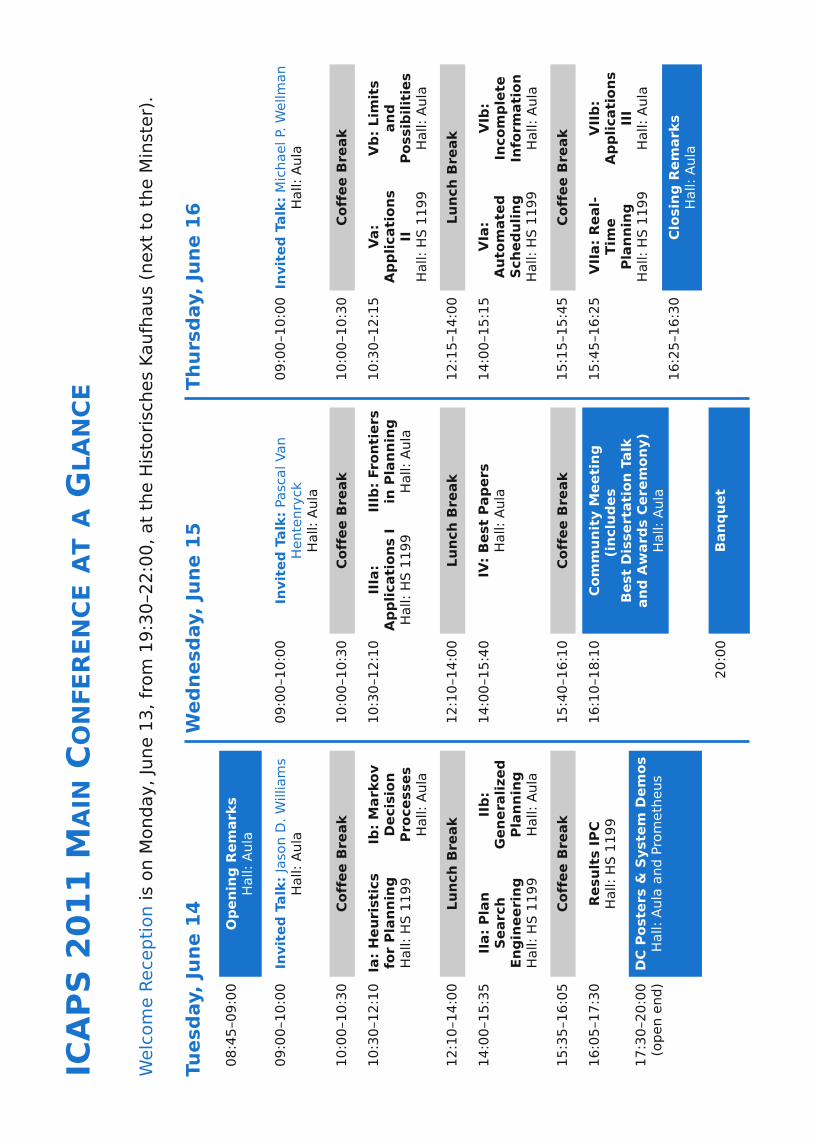
ICAP
S 20
11 M
AIN C
ON
FERE
NCE
AT
A G
LAN
CE
Tues
day,
June
14
Wed
nesd
ay, J
une
15Th
ursd
ay, J
une
16
Wel
com
e Re
cept
ion
is o
n M
onda
y, Ju
ne 1
3, fr
om 1
9:30–2
2:00
, at t
he H
isto
risch
es K
aufh
aus
(nex
t to
the
Min
ster
).