Computer Architecture II TKT-3400 (TKT-3406) ALU-1 ALU-2 Logic & Shift Load Unit Store Unit Reorder...
50
1 Computer Architecture II TKT-3400 (TKT-3406) Some remaining issues… Jari Nurmi Tampere University of Technology 2006 Reliability, availability and dependability • Dependability = the delivered service can be (justifiably) relied on • Failure = actual behavior of the service different from specified behavior (an error affects the delivered service) • Error = defect in module/system • Fault = cause for an error (first, a latent error until activated) • Error latency = time difference of error occurrence and the resulting failure
Transcript of Computer Architecture II TKT-3400 (TKT-3406) ALU-1 ALU-2 Logic & Shift Load Unit Store Unit Reorder...

1
Computer Architecture IITKT-3400 (TKT-3406)
Some remaining issues…
Jari NurmiTampere University of Technology
2006
Reliability, availability and dependability
• Dependability = the delivered service can be (justifiably) relied on
• Failure = actual behavior of the service different from specified behavior (an error affects the delivered service)
• Error = defect in module/system• Fault = cause for an error (first, a latent error until
activated)• Error latency = time difference of error
occurrence and the resulting failure

2
Reliability, availability and dependability
• Reliability = continuous service time, time to failure– e.g. MTTF (Mean Time To Failure) is a reliability measure– the reciprocal of MTTF = failure rate– collective failure rate of a system = sum of component
failure rates– service interruption time = MTTR (Mean Time To Repair)
• Availability = (for a non-redundant system) MTTF / (MTTF+MTTR)
• Reliability and availability are quantitative measures (unlike dependability)
Example• A disk subsystem has the following components and
MTTF– 10 disks, each 1,000,000 hours MTTF– 1 SCSI controller, 500,000-hour MTTF– 1 power supply, 200,000-hour MTTF– 1 fan, 200,000-hour MTTF– 1 SCSI cable, 1,000,000 MTTF
• Assuming independent failures, the MTTF for the system is– Failure rate 10 x 1/1M + 1/500,000 + 1/200,000 + 1/200,000 + 1/1M =
23/1M– MTTF = 1/Failure rate = 1M/23 = 43,500 hours (< 5 years)
• Assuming that the system will be serviced within 24 hours of the failure the availability is 43,500/43,524 = 99.94%
• Advertised ”five nines” availability (99.999%) of some computers would mean 5 minute down-time per year!

3
Reliability improvements• Fault avoidance = prevent fault occurrence by
construction• Fault tolerance = providing correct service by
adding redundancy• Error removal = minimization of latent errors by
verification (e.g. error correction codes)• Error forecasting = estimation of the presence,
creation and consequences of errors
Benchmarks of storage performance• Transaction-Processing Benchmarks
– simulation of order-entry environment» entering and delivering orders» recording payments» checking status of orders» monitoring stock at warehouses
– maintained by TPC, results audited• SPEC System-Level File Server (SFS)
– network file service (NFS) server synthetic benchmark• SpecWeb
– simulation of web accesses at a web server» mixture of small (icon) to very large (document) accesses

4
Benchmarks of dependability and availability
• In the TPC-C benchmark, there is a requirement that the system must handle a single disk failure (so, all are using some RAID configuration)
• Availability benchmarks only started to be constructed– measuring e.g. the policy and performance of RAID
reconstruction when a failure is injected– in the future also multiple fault recovery, other than RAID
system characterization, etc.
Network throughput and latency• Bisection bandwidth characterizes the network• The bandwidth to a single sender is often
referred to as throughput• Latency = sender overhead (e.g. checksum) +
time-of-flight + message size/throughput + receiver overhead (e.g. error correction)
• Time-of-flight = time for the message header to reach the receiver end

5
Network protocols
• TCP and IP headers:
• On-chip networks typically use simpler protocol stacks
Density-optimized processors?• Traditional desk-top processors are optimized to
performance (e.g. SPEC)• Power-efficiency becoming an important issue
also in non-portable devices– servers kept in collocation sites, where power causes a
major cost– the processor density is limited by the power consumption
(heat dissipation)• Replacing fewer power-hungry processors with
somewhat more power-efficient processors (a cluster) makes sense

6
Positioning the clusters...• Price/performance of SMP, NUMA and cluster
So, what have we learned on this course?

7
Architecture Trends in 1990’s-2000’s
• Address size doubling (32-bit to 64-bit)• Optimizing conditional branches by conditional (”predicated”)
execution– deep pipelining makes conditional branches costly– going to extend to greater degree of speculation
• Cache performance optimization via prefetch (Ch 5)• Support for multimedia• Faster floating-point operations (and merging FP to the core, not as
co-processor)• Long instruction words to gain more ILP (Ch 4)• Blending of DSP and general-purpose processors
– approaching from both sides• 80x86 emulation (like Transmeta Crusoe, see Ch 4)
MIPS with Tomasulo’s algorithm

8
• Solution: 2-bit scheme where prediction is changed only if mispredicted twice:
• Can be implemented as a saturating counter• 2-bit predictors do almost as well as n-bit predictors
2-bit Branch Prediction Buffer
T
T
NT
Predict Taken
Predict Not Taken
Predict Taken
Predict Not Taken
11 10
01 00T
NT
T
NT
NT
Branch Correlation Using Branch History
Two schemes (a, k, m, n)
• PA: Per address history, a > 0• GA: Global history, a = 0
n-bit saturating Up/DownCounter Prediction
Table size (usually n = 2): #bits = k * 2a + 2k * 2m *n
Variant: Gshare (Scott McFarling’93): GA which takes logic OR of PC address bits and branch history bits
Branch Address0 1 2k-1
0
1
2m-1
Branch History Table
a k
m
Pattern History Table

9
Tournament predictors• One form of multilevel branch predictors• Several (≥2) levels of branch prediction
tables + algorithm to ”predict the right predictor”
• E.g., local and global • In Alpha 21264
– 4k 2-bit counters indexed by local branch address to select between global/local
– 4k 2-bit counters indexed by last 12 branches
– two-level local predictor» 1k 10-bit history table (10 last branches at the local
address)» indexes 1k 3-bit counters
– total 29k bits– less than 1/1000 mispredictions
(SPECfp95)!!!
A 2-bit saturating counterselects the predictor.
Branch Target Buffer• Branch condition is not enough !!• High-bandwidth instruction stream needed• Branch Target Buffer (BTB): Tag and Target address
Tag branch PC PC if taken
=? Branchprediction(often in separatetable)
Yes: instruction is branch. Use predicted PC as next PC if branch predicted taken.No: instruction is not a
branch. Proceed normally
10…..10 101 00PC

10
Superscalar ConceptInstructionMemory
InstructionCache
Decoder
BranchUnit ALU-1 ALU-2 Logic &
ShiftLoadUnit
StoreUnit
ReorderBuffer Register
File
DataCache
DataMemory
Reservation Stations
Address
DataData
Instruction
Key ideas of speculation• Instructions may execute out-of-order but are forced to
commit in order• Instruction commit happens when the instruction is no
longer speculative (the prediction was proven correct)• Buffer needed to hold instructions that have executed but
not committed: Re-Order Buffer (ROB)• ROB is also used to pass results among instructions
(maybe speculated)• ROB is like the store buffer and can also take care of its
functionality• ROB entry: instruction type (branch/store/ALU), destination
(reg/memory address), value, ready

11
MIPS FP unit extended
Hardware speculation features• In-order commit allows precise interrupts! (ROB acts as a
future file)• If speculated instruction raises an exeption, it is recorded in
ROB; if misprediction flushed; if correct take exception before finally committing the instruction
• Memory writes do not happen until the store instruction is no more speculative!
• In-order commit also resolves WAW and WAR hazards• RAW hazards need two restrictions: not allowing load if an
active ROB store entry points to the same address and maintaining program order in effective address calculation (load address only after all preceding stores)
12
35
41
16
5860
9
1210
48
15
67 6
46
13
45
6 6 7
45
14
45
2 2 2
29
4
19
46
0
10
20
30
40
50
60
gcc espresso li fpppp doducd tomcatv
Program
Inst
ruct
ion
issu
es p
er c
ycle
Perfect Selective predictor Standard 2-bit Static None
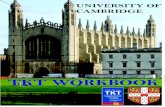
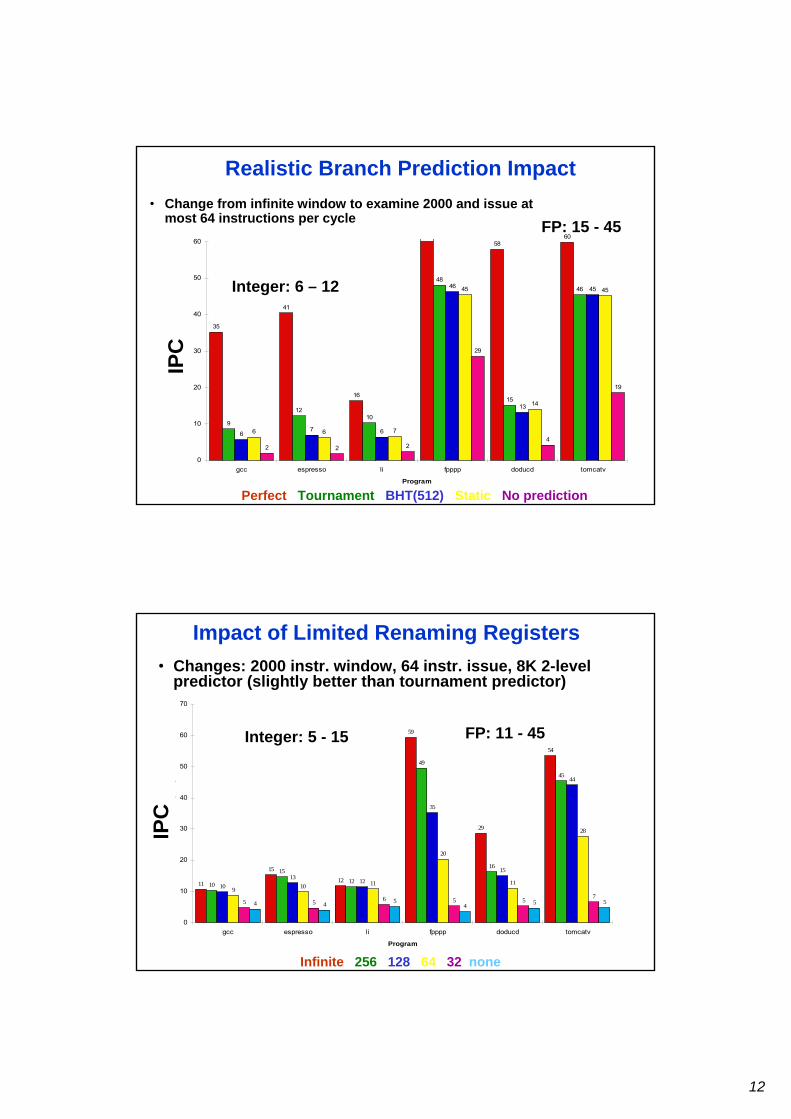
Realistic Branch Prediction Impact• Change from infinite window to examine 2000 and issue at
most 64 instructions per cycle FP: 15 - 45
Integer: 6 – 12
IPC
Perfect Tournament BHT(512) Static No prediction
11
15
12
29
54
10
15
12
49
16
1013
12
35
15
44
9 10 11
20
11
28
5 5 6 5 57
4 4 54 5 5
59
45
0
10
20
30
40
50
60
70
gcc espresso li fpppp doducd tomcatv
Program
Inst
ruct
ion
issu
es p
er c
ycle
Infinite 256 128 64 32 None
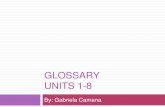
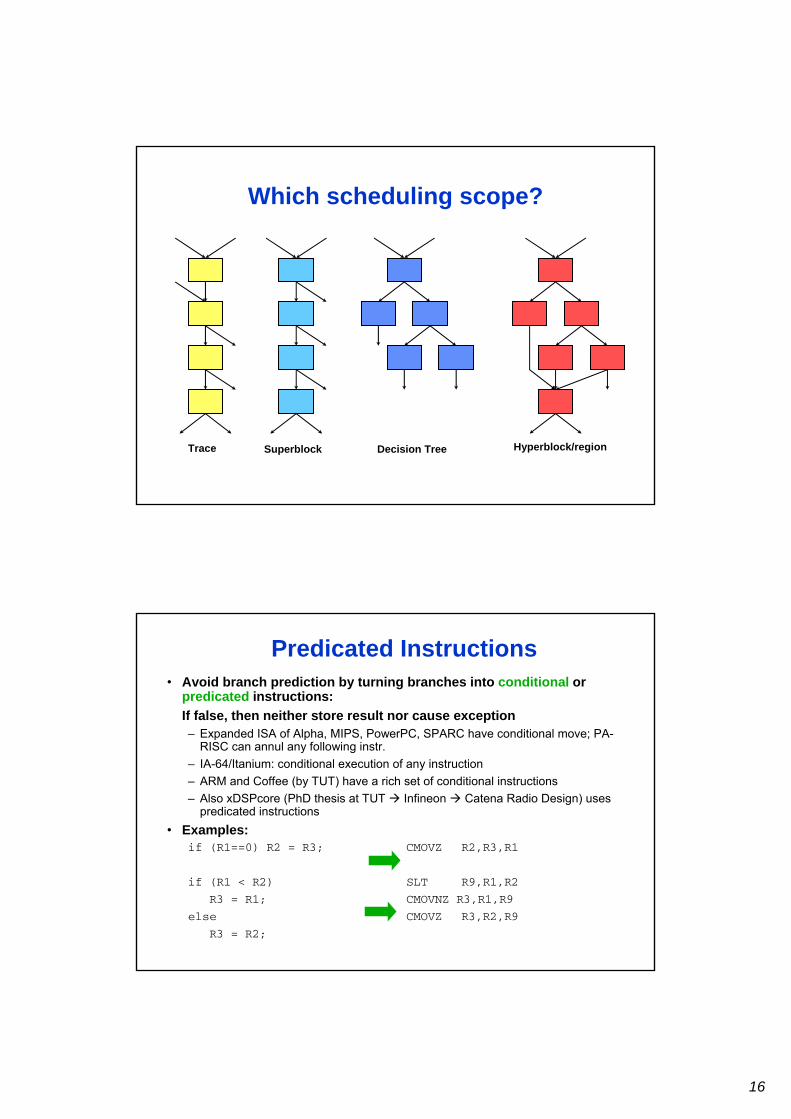
Impact of Limited Renaming Registers• Changes: 2000 instr. window, 64 instr. issue, 8K 2-level
predictor (slightly better than tournament predictor)
Integer: 5 - 15 FP: 11 - 45
IPC
Infinite 256 128 64 32 none

13
Program
0
5
10
15
20
25
30
35
40
45
50
gcc espresso li fpppp doducd tomcatv
10
15
12
49
16
45
7 79
49
16
45 4 4
6 53
53 3 4 4
45
Perfect Global/stack Perfect Inspection None
Memory Address Alias Impact• Changes: 2000 instr. window, 64 instr. issue, 8K 2-
level predictor, 256 renaming registers
FP: 4 - 45(Fortran,no heap)
Integer: 4 - 9
IPC
Perfect Global/stack perfect Inspection None
Program
0
10
20
30
40
50
60
gcc expresso li fpppp doducd tomcatv
10
15
12
52
17
56
10
15
12
47
16
10
1311
35
15
34
910 11
22
12
8 8 9
14
9
14
6 6 68
79
4 4 4 5 46
3 2 3 3 3 3
45
22
Infinite 256 128 64 32 16 8 4
Window Size Impact• Assumptions: Perfect disambiguation, 1K tournament predictor, 16 entry return
stack, 64 renaming registers, issue as many as window
Integer: 6 - 12
FP: 8 - 45
IPC

14
Multiple-Issue Processors
• Vector Processing: Explicit coding of independent loops as operations on large vectors of numbers– Multimedia instructions being added to many processors
• Multiple-Issue Processors– Superscalar: varying no. instructions/cycle (1 to 8), scheduled by
compiler or by HW (Tomasulo) (dynamic issue capability)» IBM PowerPC, Sun UltraSparc, DEC Alpha, Pentium III/4
– VLIW (very long instr. word): fixed number of instructions (4-16) scheduled by the compiler (static issue capability)» Intel Architecture-64 (IA-64), TriMedia, TI C6x
• Anticipated success of multiple instructions led to Instructions Per Cycle (IPC) metric instead of CPI
Architecture ComparisonCharacteristic CISC RISC VLIWInstruction size varies one size one sizeInstr. format field placement regular regular
variesInstr. semantics varies from simple one simple many simple
to complex operation operationsRegisters few, sometimes many, GP many, GP
specialHardware design Microcoded Impl. with Impl. with
implementations one pipeline multiple pipe
Pic. of 5 instr

15
Superscalar versus VLIW• VLIW advantages:
– Much simpler to build. Potentially faster
• VLIW disadvantages and proposed solutions:– Binary code incompatibility
» Object code translation or emulation» Less strict approach (EPIC, IA-64, Itanium)
– Increase in code size, unfilled slots are wasted bits» Use clever encodings, only one immediate field» Compress instructions in memory and decode them when they are fetched
– Lockstep operation: if the operation in one instruction slot stalls, the entire processor is stalled» Less strict approach
Advanced compiler support techniques
• Loop-level parallelism• Software pipelining• Global scheduling (across basic blocks)
16
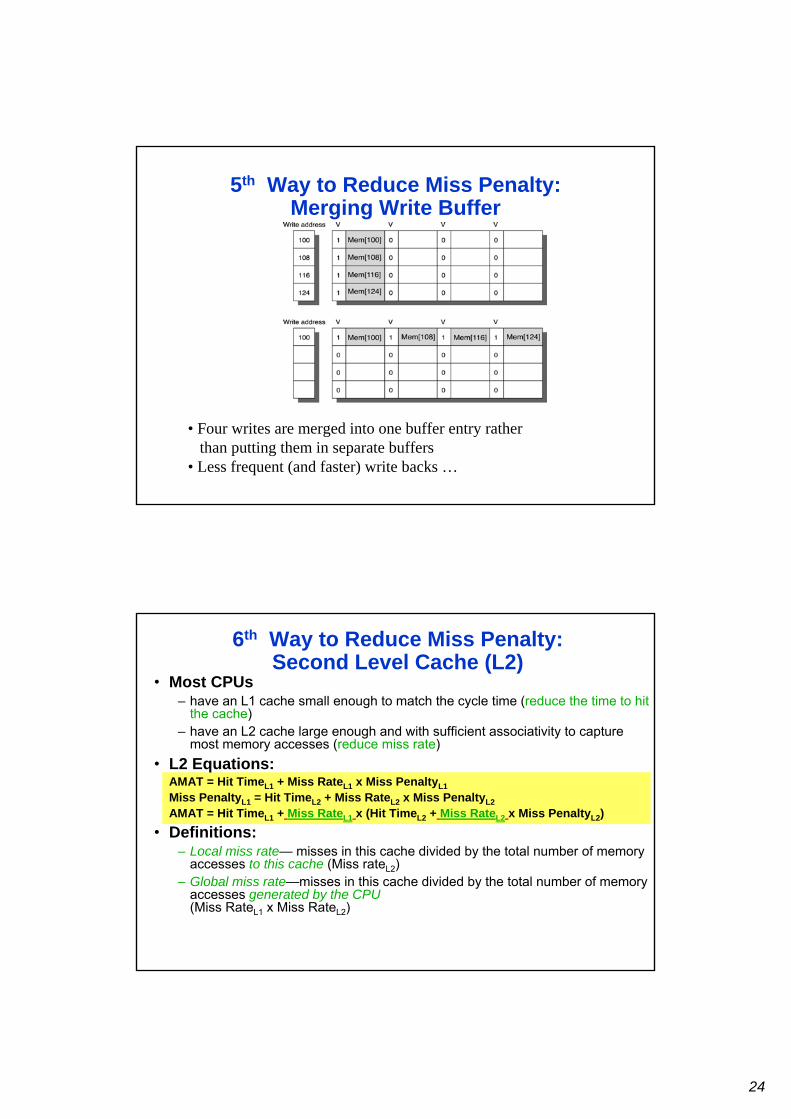
Which scheduling scope?
Trace Superblock Decision Tree Hyperblock/region
• Avoid branch prediction by turning branches into conditional or predicated instructions:If false, then neither store result nor cause exception– Expanded ISA of Alpha, MIPS, PowerPC, SPARC have conditional move; PA-
RISC can annul any following instr.– IA-64/Itanium: conditional execution of any instruction– ARM and Coffee (by TUT) have a rich set of conditional instructions– Also xDSPcore (PhD thesis at TUT Infineon Catena Radio Design) uses
predicated instructions• Examples:
if (R1==0) R2 = R3; CMOVZ R2,R3,R1
if (R1 < R2) SLT R9,R1,R2
R3 = R1; CMOVNZ R3,R1,R9
else CMOVZ R3,R2,R9
R3 = R2;
Predicated Instructions

17
Speculative Loads• Speculative load (sld): does not generate exceptions• Speculation check instruction (specck): check for
exception. The exception occurs when this instruction is executed. Exact exception behavior is preserved.
ld r1,0(r3) # load A
sld r9,0(r2) # speculative load B
bnez r1,L1 # test A
specck 0(r2) # perform exception check
j L2
L1: addi r9,r1,4 # else part
L2: st r9,0(r3) # store A
Using poison bit• Exception tracked when occuring but any
terminating exception is postponed until the result is used. Not completely precise exception.
• Speculative load turns on the poison bit, normal use (addi) turns it off:
ld r1,0(r3) # load A
sld r14,0(r2) # speculative load B
beqz r1,L3 # test A
addi r14, r1, 4 # else part
L3: st r14,0(r3) # store A

18
EPIC Architecture: IA-64• Instructions grouped in 128-bit bundles
– 3 * 41-bit instruction– 5 template bits, indicate type and stop location
• Each 41-bit instruction – starts with 4-bit opcode, and – ends with 6-bit guard (boolean) predicate register-id
Predication and speculation support in IA-64• Nearly all instructions can be predicated• Predicate registers set by compare or test
– Ten different tests– Two predicate registers as target
» Result and its complement» Logical function output of two tests (and its complement)
• Poison bits (NaT = Not a Thing bits) used for deferred exceptions• NaTVal floating-point value encoded in the FP result register• In addition to causing an exception when the NaT/NaTVal is used, there
are explicit checks• Speculative and non-speculative loads• Advanced load for speculating; creates ALAT table entry with load
destination register and memory address– Stores check against the ALAT entries and invalidate the entry if the addresses
match

19
TriMedia TM32• Classic VLIW with 5 parallel operations, relies
fully on the compiler to avoid hazards• 23 functional units of 11 types, restricted
combinations of 5 operations in one instruction• Each individual operation predicated with a
single register value; if 0 cancel• At most 1 branch with true predicate in an
instruction (compiler must take care)• Speed-optimized code size about 4x compared to
MIPS, performance/clock rate about 12x
Instruction coding in xDSPcore• Instruction: one or two instruction words
• Execution bundle: xLIW = scalable long instruction word
• Fetch bundle: four instruction words
20 bit
40 bit
from 1 instruction up to10 instructions words ...

20
Instruction fetch and issue in xDSPcore
• 1 to 5 instructions (1 to 10 instruction words) executed in parallel
INS 1INS 1 INS 2INS 2 INS 3INS 3 INS 4INS 4
INS 5INS 5 INS 6INS 6 INS 7INS 7 INS 8INS 8
INS 9INS 9 INS10INS10 INS11INS11 INS 12INS 12
Align Unit
INS 1INS 1 INS 2INS 2
INS 3INS 3 INS 4INS 4 INS 5INS 5 INS 6INS 6
INS 7INS 7
INS 8INS 8 INS 9INS 9
INS 10INS 10 INS 11INS 11 INS 12INS 12
MOV1MOV1 MOV2MOV2 CMP1CMP1 CMP2CMP2 BRBR
Transmeta Crusoe• VLIW for low-power portable computing• Two- and four-operation instructions (64/128-bit)• Five types of operation slots: ALU, Compute, Memory, Branch,
Immediate• Software emulation of x86 instruction set
– Interpretation instruction-by-instruction– Translation of basic blocks to Crusoe code sequence (and caching)
• Support for reordering– Shadowed register file– Program-controlled store buffer– Memory alias detection hardware with speculative loads– Conditional move instruction
• Permanent state is not changed until no exceptions possible (shadow registers, store buffer)
• Precise state of x86 instructions execution in shadow registers• Also speculative stores (to the store buffer only)

21
Direct mapped and associative caches
Tag Data Tag Data Tag Data Tag Data Tag Data Tag Data Tag Data Tag Data
Eight-way set associative (fully associative)
Tag Data Tag Data Tag Data Tag Data
Four-way set associative
Set
0
1
Tag Data
One way set associative�(direct mapped)
Block
0
7
1
2
3
4
5
6
Tag Data
Two-way set associative
Set
0
1
2
3
Tag Data
block
2 blocks / set
4 blocks / set
8 blocks / set
• Taking advantage of spatial locality:
Direct Mapped Cache
Address (showing bit positions)
16 12 Byte�offset
V Tag Data
Hit Data
16 32
4K�entries
16 bits 128 bits
Mux
32 32 32
2
32
Block offsetIndex
Tag
31 16 15 4 3 2 1 0
Address (bit positions)

22
A 4-Way Set-Associative Cache
2 2 8
V TagIndex012
25 325 425 5
D ata V Ta g D a ta V T ag D ata V T ag D ata
3 22 2
4 - to - 1 m ultip le xo r
H it D a ta
1238910111 23 031 0
Set 2
Way 3
2nd Way to Reduce Miss Penalty: Subblock Placement
• Don’t have to load full block on a miss• Have valid bits per sub-block to indicate valid• (Originally invented to reduce tag storage)
Valid Bits Subblocks
1 1 1 11 1 0 00 1 0 10 0 0 0
100300200204
Tags

23
3rd Way to Reduce Miss Penalty: Early Restart and Critical Word First
• Don’t wait for full block to be loaded before restarting CPU– Early restart—As soon as the requested word of the block
arrives, send it to the CPU and continue– Critical Word First—Request the missed word first from
memory and send it to the CPU as soon as it arrives; let the CPU continue while filling the rest of the words in the block
• Generally useful only when blocks are large
4th Way to Reduce Miss Penalty:Add a Victim Cache
• How to combine fast hit time of direct-mapped cache yet avoid conflict misses?
• Add a small fully associative cache in which replaced blocks are given a “second chance”
• Jouppi [1990]: 4-entry victim cache removed 20% to 95% of conflict misses for a 4 KB direct-mapped data cache
• Used in Alpha, HP machines
24
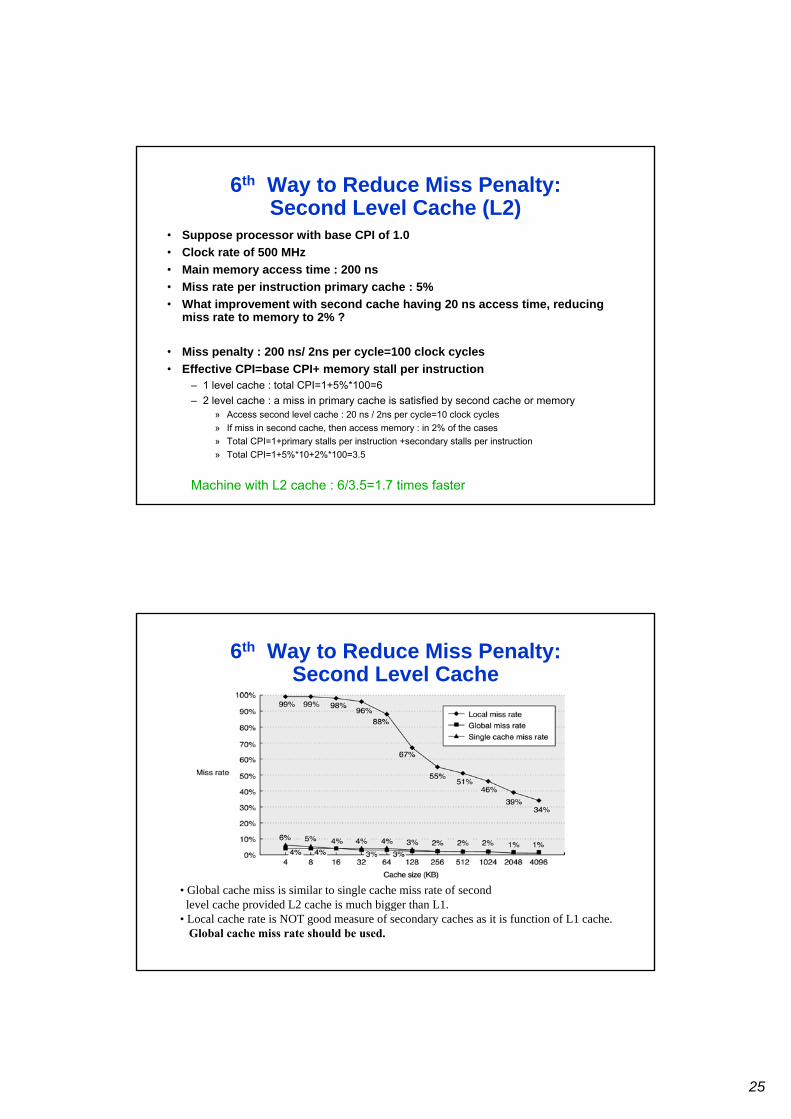
5th Way to Reduce Miss Penalty:Merging Write Buffer
• Four writes are merged into one buffer entry rather than putting them in separate buffers
• Less frequent (and faster) write backs …
6th Way to Reduce Miss Penalty:Second Level Cache (L2)
• Most CPUs– have an L1 cache small enough to match the cycle time (reduce the time to hit
the cache)– have an L2 cache large enough and with sufficient associativity to capture
most memory accesses (reduce miss rate)• L2 Equations:
AMAT = Hit TimeL1 + Miss RateL1 x Miss PenaltyL1Miss PenaltyL1 = Hit TimeL2 + Miss RateL2 x Miss PenaltyL2AMAT = Hit TimeL1 + Miss RateL1 x (Hit TimeL2 + Miss RateL2 x Miss PenaltyL2)
• Definitions:– Local miss rate— misses in this cache divided by the total number of memory
accesses to this cache (Miss rateL2)– Global miss rate—misses in this cache divided by the total number of memory
accesses generated by the CPU(Miss RateL1 x Miss RateL2)
25
6th Way to Reduce Miss Penalty:Second Level Cache (L2)
• Suppose processor with base CPI of 1.0• Clock rate of 500 MHz• Main memory access time : 200 ns• Miss rate per instruction primary cache : 5%• What improvement with second cache having 20 ns access time, reducing
miss rate to memory to 2% ?
• Miss penalty : 200 ns/ 2ns per cycle=100 clock cycles• Effective CPI=base CPI+ memory stall per instruction
– 1 level cache : total CPI=1+5%*100=6– 2 level cache : a miss in primary cache is satisfied by second cache or memory
» Access second level cache : 20 ns / 2ns per cycle=10 clock cycles» If miss in second cache, then access memory : in 2% of the cases» Total CPI=1+primary stalls per instruction +secondary stalls per instruction» Total CPI=1+5%*10+2%*100=3.5
Machine with L2 cache : 6/3.5=1.7 times faster
6th Way to Reduce Miss Penalty:Second Level Cache
• Global cache miss is similar to single cache miss rate of second level cache provided L2 cache is much bigger than L1.
• Local cache rate is NOT good measure of secondary caches as it is function of L1 cache. Global cache miss rate should be used.

26
6th Way to Reduce Miss Penalty:Second Level Cache
Reducing Miss Penalty Summary
• Six techniques– Read priority over write on miss– Sub-block placement– Early Restart and Critical Word First on miss– Victim cache– Write buffer merging– Second Level Cache
• Can be applied recursively to Multilevel Caches– Danger is that time to DRAM will grow with multiple levels in
between

27
How Can We Reduce Misses?
• 3 Cs: Compulsory, Capacity, Conflict• In all cases, assume total cache size not changed
What happens if we1) Change Block Size:
Which of 3Cs is obviously affected? compulsory2) Change Cache Size:
Which of 3Cs is obviously affected? capacity misses3) Introduce higher associativity :
Which of 3Cs is obviously affected? conflict misses
Block Size (bytes)
Miss Rate
0%
5%
10%
15%
20%
25%
16 32 64
128
256
1K
4K
16K
64K
256K
1st Way to Reduce Misses:Increase Block Size

28
2nd way to reduce miss rate : Larger Caches
• Increase capacity of cache
• Disadvantages : – longer hit time (may determine processor cycle time!!)– higher cost
3rd Way to Reduce Misses:Increase Associativity
• 2:1 Cache Rule: – Miss Rate direct-mapped cache of size N ≈
Miss Rate 2-way set-associative cache of size N/2
• Beware: Execution time is only true measure of performance!– Access time of set-associative caches larger than access time direct-
mapped caches– L1 cache often direct-mapped (access must fit in one clock cycle)– L2 cache often set-associative (cannot afford to go to main memory)

29
• How to combine fast hit time of direct-mapped and have the lower conflict misses of 2-way SA cache?
• Divide cache in two halves. First check one half. If miss, check other half.• If in second half: pseudo-hit (slow hit)
• Note that two separate searches are conducted on a miss.• The first search proceeds as it would for direct-mapped cache.• Since there is no associative hardware, hit time is fast if it is found the first time.• Drawback: CPU pipeline is hard to design if hit takes 1 or 2 cycles
– Better for caches not tied directly to processor (L2)– Used in MIPS R1000 L2 cache, similar in UltraSPARC
4th Way to Reduce Misses:Pseudo-Associative Caches
Time
Hit Time
Pseudo Hit Time Miss Penalty
5th Way to Reduce Misses:Compiler Optimizations
• McFarling [1989] reduced caches misses by 75% for 8KB direct-mapped cache, 4-byte blocks in software
• Instructions– Reorder procedures in memory so as to reduce conflict misses– Profiling to look at conflicts (using developed tools)
• Data– Merging Arrays: improve spatial locality by single array of compound
elements vs. 2 arrays– Loop Interchange: change nesting of loops to access data in order
stored in memory– Loop Fusion: combine 2 independent loops that have same looping
and some variables overlap– Blocking: Improve temporal locality by accessing “blocks” of data
repeatedly vs. going down whole columns or rows

30
Hit Time Reduction Techniques• Small (must fit on-chip) and simple (direct-
mapped)• Avoid address translation
– Use virtual addresses for the cache (virtual cache vs. physical cache)
– Problem: cache needs to be flushed on a process switch or a process identifier (PID) must be added to the tag
• Pipelining writes– For reads, checking the tag and reading the data can be
performed in parallel, but not for writes

31
Reducing miss penalty or miss rate by introducing Parallellism
• Prefetching• Non blocking cache• Compiler controlled fetching
Bandwidth to main memory• Next level from cache(s) is the main memory• Characterized by latency and bandwidth• Very little can be done for latency• The bandwidth can be improved in different ways• Baseline performance:
– 4 clock cycles to send address– 56 clock cycles for the access of a word– 4 clock cycles to send a word of data
– Miss penalty for 4 word x 8 bytes blocks = 4x(4+56+4) = 256 cycles– Memory bandwidth 1/8 bytes per cycle (32/256)

32
Techniques to speed up memory
Caches and virtual memory – similarities and differences
• In most parts, caches and virtual memory are very analogous– block is called page or segment– miss is called page fault or address fault
• Virtual memory needs address translation• Operating system (SW) controls virtual memory replacements (HW in
caches)• Processor address size determines the size of virtual memory (cache
size is independent)• Secondary storage in virtual memory is also used for the file system
(not normally in the address space!)• Cache blocks and paged memory address straightforward to address,
segments need two addresses (segment number + offset)– segments seldom used in modern computers– paged segments and multiple page sizes instead (hybrid schemes)

33
Virtual to physical address mapping
• E.g. 32-bit address, 4 kB pages, 4 bytes per page table entry 4 MB table
• Inverted page table: storing virtual – physical pairs for all physical pages: 512 MB physical memory 8 x 512 M / 4k = 1 MB
TLB• Page tables in main memory
– two accesses: one to get address, another for the actual data access• Translation Lookaside Buffer (TLB) to alleviate this
– fully associative cache of address translations– TLB misses can be as significant to the CPI as cache misses!
• Alpha 21264 data TLB:

34
Protection• Process = program + state needed to continue running it• Context switch = exchange of running process to another• Memory allocated by the operating system to the processes; memory
protected from other processes• Simple check based on base and bound
– base ≤ address ≤ bound• The computer needs to provide
– at least two modes; user and superuser/supervisor/kernel/executive mode for the operating system
– a portion of CPU state that a user process can use but not write (e.g. the base and bound registers, mode bit, exception enable bits)
– mechanisms to switch between user and supervisor modes (system call and return to user mode)
• Hardware checks can be carried out in virtual-physical translation• Different models for protection
– Page level protection, user/kernel protection– Co-centric rings of protection levels (from most trusted to ”civilian”)– Key-based access (heavy to check)
Some issues in memory hierarchy design
• Superscalar CPU and number of ports to the cache– suffiecient peak bandwidth to cache must be maintained, including possible multiple
simultaneous load/store instructions– for non-blocking caches, the whole memory hierarchy must be non-blocking
• Speculative execution and the memory system– invalid addresses may be generated by speculative execution– exceptions from speculated or conditional instructions must be detected and suppressed– non-blocking caches needed– L2 miss penalty too large, typically only L1 misses are allowed to be responded to
speculatively• Combining L1I and instruction fetch and decode
– instruction cache and first part of execution merging– e.g. trace caches combining branch prediction and instruction fetch, and even store
decoded operations– in embedded systems, instruction cache may include uncompressed (and the main
memory compressed) instructions

35
Some more issues in memory hierarchy design
• Embedded computer caches and real-time performance– performance variations more a concern than average performance (because of real-time
constraints)– instruction caches used widely, since they are quite predictable– data caches may have portions that can be ”locked down” under program control
• Embedded computer caches and power– caches also save power because of fewer external accesses– some cache optimizations can be reoriented for power consumption instead of raw
performance• I/O and consistency of cached data
– I/O may read a stale copy of data (cache and memory incoherent)– I/O to/from cache increases stalls and may cause unnecessary page faults– write-through enables to use the main memory for I/O, but L2 is often write-back, and
embedded systems avoid write-through because of power reasons– I/O buffers can be kept out of cache by marking them uncacheable, or I/O-related blocks
can be invalidated (by operating system or by checking a redundant copy or tags by HW) when input occurs

36
Emotion Engine of Sony Playstation 2• 10 DMA channels to transfer
data• Graphics Synthesizer uses
on-chip DRAM to allow 1024-bit transfers
• Emotion Engine has superscalar 64-bit MIPS III extended with 128-bit SIMD instructions, with 16kB (two-way) I-cache, 8kB (two-way) D-cache, 16kB scratchpad memory. Vector unit 0 is DSP-like coprocessor with 4kB data and 4kB instruction memory. VPU1 is more independent, with 16kB instruction and 16kB data memories. Common 128-bit bus + 128-bit dedicated buses CPU to VP0 and VP1 to graphics I/F.
• I/O processor can also run PS1 games
Parallel Architecture
• Parallel Architecture extends traditional computer architecture with a communication network– abstractions (HW/SW interface)– organizational structure to realize abstraction
efficiently
Communication Network
Processingnode
Processingnode
Processingnode
Processingnode
Processingnode

37
Communication models• Shared Memory (SM): shared address space
– e.g., load, store, atomic swap
– Physically shared => Symmetric Multi Processors (SMP)» usually combined with local caching
– Physically distributed => Distributed Shared Memory (DSM)
SMP: symmetric multi-processor• Memory: centralized with uniform access time (UMA)
and bus interconnect, I/O• Examples: Sun Enterprise 6000, SGI Challenge, Intel
SystemPro

38
Large-Scale MP Designs• Memory: distributed with nonuniform access time (NUMA)
and scalable interconnect (distributed memory)
1 cycle
10 cycles
100 cycles
Communication models• Message Passing (MP)
– e.g., send, receive library calls
• Note that MP can be built on top of SM and vice versa
Process P1 Process P2
receive
receive send
sendFiFO

39
Memory access cycles vs. cache size
Memory access cycles vs. processor count

40
L3 misses vs. block size
Uninterruptable Instruction to Fetch and Update Memory
• Atomic exchange: interchange a value in a register for a value in memory0 => synchronization variable is free 1 => synchronization variable is locked and unavailable
• Test-and-set: tests a value and sets it if the value passes the test (also Compare-and-swap)
• Fetch-and-increment: it returns the value of a memory location and atomically increments it– 0 => synchronization variable is free
41
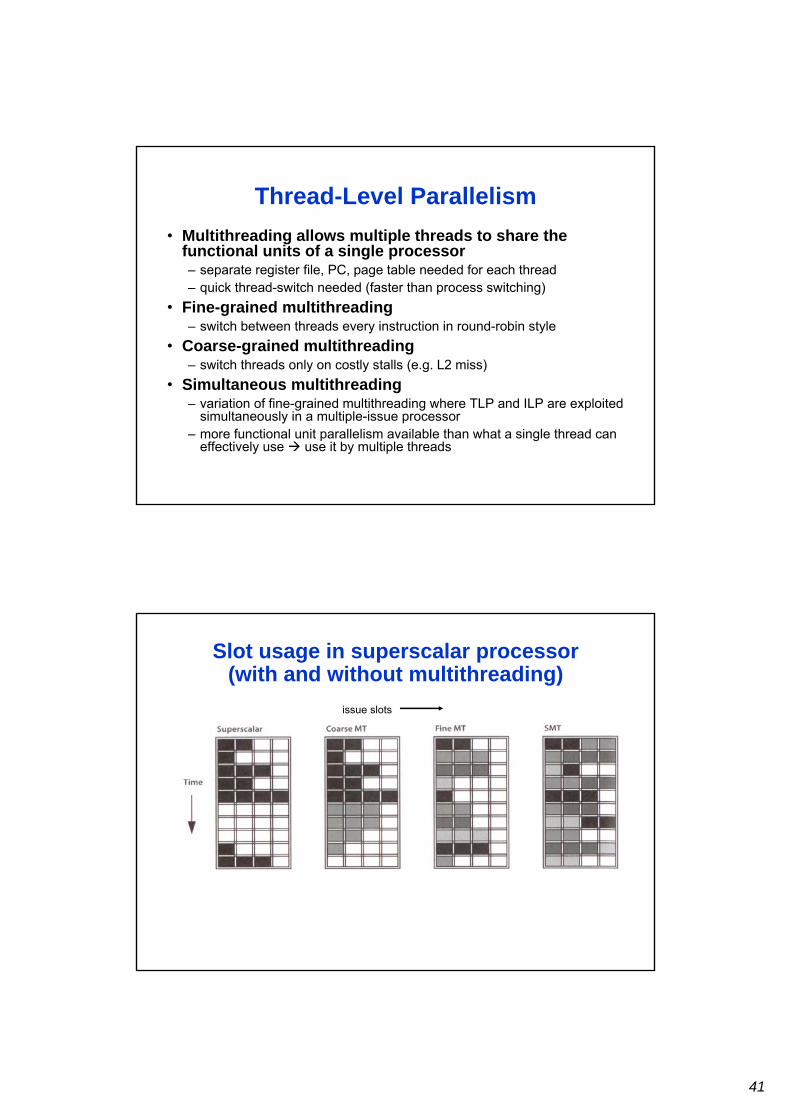
Thread-Level Parallelism• Multithreading allows multiple threads to share the
functional units of a single processor– separate register file, PC, page table needed for each thread– quick thread-switch needed (faster than process switching)
• Fine-grained multithreading– switch between threads every instruction in round-robin style
• Coarse-grained multithreading– switch threads only on costly stalls (e.g. L2 miss)
• Simultaneous multithreading– variation of fine-grained multithreading where TLP and ILP are exploited
simultaneously in a multiple-issue processor– more functional unit parallelism available than what a single thread can
effectively use use it by multiple threads
Slot usage in superscalar processor(with and without multithreading)
issue slots

42
Network design parametersLarge network design space:• topology, degree• routing algorithm
– path, path control, collision resolvement, network support, deadlock handling, livelock handling
• virtual layer support• flow control• buffering• QoS guarantees• error handling• etc, etc.
Circuit-switching and packet-switching
• Circuit-switching– A connection has to be established between the communicating parties
before the transfer can start– The line is reserved for the whole time independently of the amount of
traffic (like the phone line is reserved whether you are silent or talk at your maximum rate)
– The connection will be explicitly closed when there is no more need for the communication
• Packet-switching– The data is packed to carry also information about the destination
address (like a letter or packet in mail)– Separate packets or sub-packets (flits or phits) can be sent along
different routes (if the networks allows that)– Also other senders can inject packets to the network to travel along
(partially) the same route

43
Network Topology• Switched media have a topology that indicate
how nodes are connected• Topology determines
– Degree: number of links from a node– Diameter: max number of links crossed between nodes– Average distance: number of links to random destination– Bisection: minimum number of links that separate the
network into two halves– Bisection bandwidth: link bandwidth x bisection
Network topologies - Mesh• Two-dimensional mesh – very intuitive, indeed
resources
nodes
links

44
Network topologies - Torus• Torus and folded torus extend from mesh
– folded torus has 2x length of the links compared to mesh!
Network topologies - Ring• Ring is the simplest of the networks
– Unidirectional or bidirectional– Does not correspond to the physical placement of resources!

45
Network topologies – Octacon and Spidercon
• Extend the ring by introducing shortcuts– Octacon 4 diagonals– Spidercon N diagonals
Network performance
• Throughput– throughput/input– aggregate throughput– bisection throughput
• Latency– time from data injection to readout
completion
• Inter-related and function of network loading!
020406080
100120140160
10 30 50 70 90
Load %
Throughput
Latency

46
xPipes architecture example –pipelined links
N pipeline stages
N pipeline stages
Part of M cycles for ACK/NACK generation
Part of M cycles forACK/NACK receipt
Source: Davide Bertozzi
Two virtual channels
Example of PROTEO network

47
NOSTRUM basic principle
Source: Axel Jantsch
University of Twente circuit-switched NoC router
CB_SEL
IN
OUT
PORT (HOME)
• Fully connected crossbar• (tri-states or multiplexers)
• Data converter for data• (de-)serializing
• Crossbar configuration memory of 20x5 bit
• Bi-directional links of 2 times • 4 lanes
• Best effort via a separate network
48
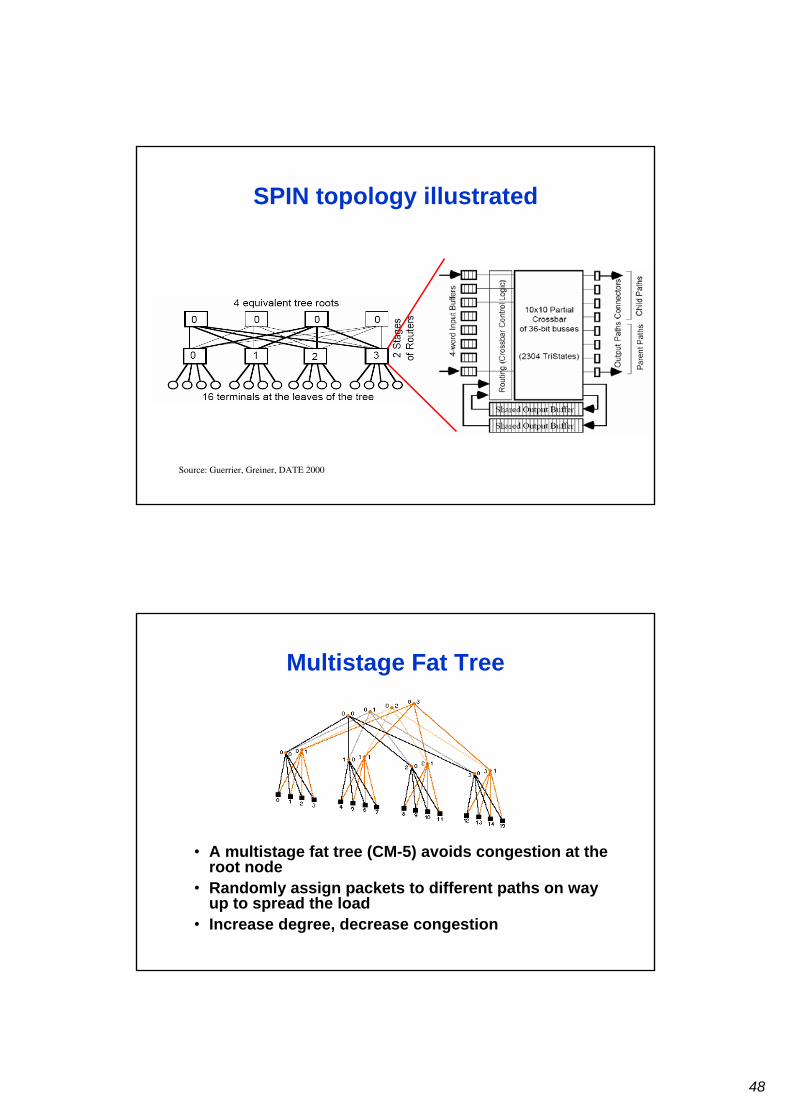
SPIN topology illustrated
Source: Guerrier, Greiner, DATE 2000
Multistage Fat Tree
• A multistage fat tree (CM-5) avoids congestion at the root node
• Randomly assign packets to different paths on way up to spread the load
• Increase degree, decrease congestion

49
Example of XGFT
• Height
• # of child links
• # of parent links
Æthereal distributed GS-BE programming architecture
Source: Goossens et al, D&T of Computers, 2005.

50
Fundamental MP design decisions
• Homogeneous versus Heterogeneous ?• Bus versus Network (and what properties) ?• Shared memory versus Message passing ?• QoS support, Guarantees built-in ?• Generic versus Application specific ?• What types of parallelism to support ?• Focus on Performance, Power or Cost ?• Memory organisation ?
Reliability and availability• A disk subsystem has the following components and
MTTF– 10 disks, each 1,000,000 hours MTTF– 1 SCSI controller, 500,000-hour MTTF– 1 power supply, 200,000-hour MTTF– 1 fan, 200,000-hour MTTF– 1 SCSI cable, 1,000,000 MTTF
• Assuming independent failures, the MTTF for the system is– Failure rate 10 x 1/1M + 1/500,000 + 1/200,000 + 1/200,000 + 1/1M =
23/1M– MTTF = 1/Failure rate = 1M/23 = 43,500 hours (< 5 years)
• Assuming that the system will be serviced within 24 hours of the failure the availability is 43,500/43,524 = 99.94%
• Advertised ”five nines” availability (99.999%) of some computers would mean 5 minute down-time per year!