Hyperbolic Functions. The Hyperbolic Sine, Hyperbolic Cosine & Hyperbolic Tangent.
Upload
daniel-choiCategory
view
214download
0
Mathematical Methods in the Applied SciencesMath. Meth. Appl. Sci., 22, 1293}1321 (1999)MOS subject classi"cation: 47 A 68; 47 B 35; 45 E 10; 78 A 45
Computations on Thin Non-inhibited HyperbolicElastic Shells. Bench-marks for Membrane Locking
Daniel ChomK*
Laboratoire de MeH canique, UniversiteH de Caen Basse-Normandie, 14000, Caen and LMM,UniversiteH Pierre et Marie Curie, 75005 Paris, France
Communicated by E. Sanchez-Palencia
We study the bending limit problem of shells in relation to the membrane locking, encountered in "niteelement computation of non-inhibited very thin shells. Using a new approach of the theory of inextensionaldisplacements (or in"nitesimal bendings) we solve the bending limit problem in the case of a clampedhyperbolic paraboloid. We then use this solution to validate computations which can be used as bench-marks for the membrane locking. Such con"guration, non-inhibited hyperbolic very thin shells, usuallylacks numerical &validation'. Copyright ( 1999 John Wiley & Sons, Ltd.
1. Introduction
An elastic shell is said to be non-inhibited if its middle surface admits inextensionaldisplacements (or in"nitesimal bendings), i.e. displacements leaving the metrics un-changed in the linearized sense. Otherwise, the shell is said to be inhibited (equiva-lently, its middle surface is said to be geometrically rigid) [18].
We emphasize on the fact that the inhibition property depends on the geometry andthe boundary conditions and even the presence of edges (in the sense of folds [10]), butis totally independent of the considered material.
The natural trend of a thin elastic non-inhibited shell is to perform bendings, sincesuch deformations cost lesser energy than the membrane deformation. This heuristicassertion is con"rmed by the asymptotic analysis with thicknessP0 of various linearmodels of shell (Koiter and Naghdi), even from 3D-elasticity [18}20, 6, 17].
The membrane locking phenomenon in the computation of thin non-inhibitedelastic shells is a serious deterioration of the "nite element approximation as thethickness tends towards zero [8, 16]. A "ne analysis showed that the membranelocking was due (at least in part) to a de"ciency in the computation to approximatethe bending deformations [12, 7] properly. Thus, it is an exclusive phenomenon of the
*Correspondence to: D. ChomK , Laboratoire de MeH canique, UniversiteH de Caen Basse-Normandie, 14000Caen and LMM, UniversiteH Pierre et Marie Curie, 75005 Paris, France
CCC 0170}4214/99/151293}29$17.50 Received 3 February 1999Copyright ( 1999 John Wiley & Sons, Ltd.
non-inhibited case of shells. Some numerical problems exist also for inhibited shellsbut they are of a di!erent nature and we do not consider them here [15].
In a previous paper [12], it has been shown that membrane locking should alwaysoccur for any "nite element schemes pretending universality in computations of verythin shells, conformal or nonconformal. In fact, our pessimistic point of view is subtlein its interpretation. Although, membrane locking should always occur, it is not clearwhether such locking is awkward: it may appear signi"cant only for very smallthickness possibly without physical interpretation. We can refer this as a kind of&robustness' to the membrane locking. For instance, higher-order "nite elementschemes such as Ganev}Argyris are accepted to be more &robust' than lower-orderones [7, 12].
We believe that since the membrane locking is unavoidable, e!ort should bedirected at alleviating, possibly using existing schemes.
Here, our intention is not to answer the membrane locking robustness question. Butin this objective, the bench-marks are essentials, see [12, 7]. We propose here bench-marks concerning non-inhibited hyperbolic shells. They are based on the resolution ofthe bending limit problem for non-inhibited shells when the thickness goes to zero. Weshall consider two con"gurations (denoted as A and B) on the basis of clampedhyperbolic paraboloids, for which the set of inextensional displacement is completelydetermined. A "rst resolution of the bending limit problem was presented in [11](referred as con"guration A in section 4 of this paper).
Actually, the bending limit solution will not be a bench-mark in itself. It isa validation test for the asymptotic behaviour of a (non-inhibited) shell procedure asthe thickness goes to zero. Using classical "nite element scheme (Ganev}Argyris) toperform computations, we can validate them on the basis of the comparison with thesolution of the bending limit problem. If the asymptotic behaviour is consistent, theaccuracy of the approximation is then shown. It is the case for the computations wemake on two con"gurations of clamped non-inhibited hyperbolic paraboloid at theend of this paper. We propose then the results of these computations as bench-marksfor the membrane locking. To our knowledge, such bench-mark is not cited in theliterature.
This paper is organized as follow: after the introduction, in section 2, we recallbrie#y the asymptotic behaviour of non-inhibited elastic shells as thickness goes tozero, and its consequences on the approximation. Section 3 deals with the bendinglimit problem. First, we expose our new approach of the theory of inextensionaldisplacement. It is based on the notion of associated in"nitesimal rotation "eld thepartial derivatives of which constitute a space, denoted by R(S), isomorphic with thespace of inextensional displacement denoted by G. This will give the peculiar (ex-tremely simple) expression of the linearized change of curvature tensor oab when thedisplacements are inextensional. This "nds an application in the expression of thebending energy bilinear form a
f, and then gives a new formulation of the bending
limit problem. Section 4 is then devoted to the resolution of the bending limit problem(2.2) in the two considered cases. One case will be solved somehow in an analyticalway. The other one will be approximated by Galerkin ("nite element) projection. Weend the section with a remark on the lack of smoothness of the solution of the bendinglimit problem. Last, in section 5, we compare the some numerical computations
1294 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

performed with the MODULEF code using Ganev}Argyris thin shell's "nite element,leading to the bench-marks.
We end this introduction with some notations and conventions used in this paper.E denotes the Euclidean space referred to an orthonormal frame (O, e
1, e
2, e
3). In
this paper, we shall consider homogeneous and isotropic linearly elastic shell Se withconstant thickness e. They are de"ned with a middle surface S
Se"S]C!
e2, #
e2D .
A surface S will be given by a map (), r) where )LR2 and r denotes the positionvector. The parameters on ) are x and y instead of the usual y1 and y2 for readabilityreasons.
The Latin (resp. Greek) indices or exponents belongs to the set M1, 2, 3N (resp. M1, 2N).The Einstein's summation convention will be used. The partial derivatives are denotedin indices with a preceding comma. The variables x and y are, respectively, areassociated with the numbers 1 and 2. For some vector "eld u de"ned on ) we write
v,1"
RvRx , v
,2"
RvRy .
Of course the same rule holds for scalar functions.In a classical way, we de"ne the covariant basis on each point of S. It is constituted
by the two tangent vectors
aa"r,a
and the unit normal vector a3; we de"ne furthermore the coe$cient
a"Ea1'a
2E2.
The contravariant basis is (a1, a2, a3), de"ned by duality with the covariant basis, withthe use of the Kronecker's symbol dj
i
ai. aj"dj
i.
The coe$cients of the "rst and second fundamental form are, respectively,
aab"aa.ab ,
bab"aa.b . a3.
Let u be a displacement on S and let SI be the deformed surface, given by the map(), r#u). In this paper, we suppose that u is su$ciently small in order to stay inlinearized framework with respect to the displacement.
The linearized tensor of deformation cab(u) and the linearized tensor of curvaturevariation oab(u), see [4], are given by the following expressions:
cab(u)"12
(ub,a#ua,b )!!jabuj!babu3 ,
oab(u)"u3,ab!!jabu3,j#bjb(uj,a!!pjaup)#bja (uj,b!!pjbup),
#(bjb,a#!papbjb!!pabbja )uj!bapbpbu3 ,
Membrane Locking of Elastic Shells 1295
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

where !jab"aj . aa,b are the Christo!el's symbols and bab"aapbpb , with aab"aa . ab.We point out that these expressions will not be used in the sequel as we shall givealternate expressions in section 3.
Noting the space of kinematically admissible displacement by V, we de"ne thesubspace of kinematically admissible inextensional displacement by
G"Mu3V/cab (u)"0N,
whereas the subset of inextensional displacement without kinematic boundary condi-tion is denoted as
G3 "Mu3H2 ())/cab(u)"0N.
In fact, we have
G"G3 WV.
2. The membrane locking phenomenon and non-inhibited shells
2.1. Asymptotic behaviour of non-inhibited elastic shells, when the thicknesstends to zero
Let us consider a homogeneous and isotropic linearly elastic shell Se with a constantthickness e and a middle surface S. In the Koiter's framework, the asymptotic studyshows that when the shell is non-inhibited (S is not geometrically rigid, i.e. GOM0N),the solutions ue of (2.1) converge (when the eP 0) to the solution of the bendingproblem (2.2). We have
ueP u03G strongly in V,
where ue is the solution of the mechanical problem with the Koiter's linear model:
Find a displacement ue3V such that
eam(ue, v)#e3af (ue, v)"(fe, v) ∀v3V(2.1)
and u0 is the solution of the bending limit problem
Find a displacement u03G such that
af(u0, v)"Sf, vT ∀v3G(2.2)
with
fe"e3f, (2.3)
f independent of e and for homogeneous and isotropic elastic shells, the energybilinear forms of bending and membrane deformation are
af(u, v)"1
12 P)Aabjkoab(u)ojk (v) dS,
am(u, v)"P)Aabjkcab(u)cjk(v) dS
1296 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

with the elasticity coe$cients
Aabjk"E
2(1#l) Caajabk#aakabj#2l
1!laabajkD ,
where E is the Young's modulus and l is the Poisson coe$cient.With V"Mu3H1]H1]H2#kinematical boundary conditionsN the variational
problem (2.1) stands in Lax}Milgram framework and hence, has a unique solution,see [4].
In the sequel, we shall refer to problem (2.1) with the external forces (2.3) as theKoiter's [linear] problem. Problem (2.2) will be referred to as the bending limitproblem.
Note that in the case where G"M0N, the solutions ue of the Koiter's problemconverge to zero, see [20].
Remark 1. In this paper we consider Koiter's linear model, but analogous discussionand conclusion hold true for Naghi's model.
2.2. Non-robustness of FEM for thin elastic shells and membrane locking
In [12], the incompatibility of the inextensional displacements with the polynomialhas been shown. It implies the same incompatibility with all polynomial "niteelement's discretized space. This leads to the locking phenomenon. Let us recall thatbrie#y.
We note by Vha set of (discrete) spaces such that ∀u3V, there exists a v
h3V
hsuch
that vhP v in V when the parameter hP 0. The cases where V
hL/ V (non-conformal
methods) are included.If we denote by ue
hthe Galerkin approximation in V
hof ue, the solution of Koiter's
problem (2.1), the asymptotic behaviour of uehwhen eP 0, is similar to that of ue:
uehPu0
h,
where u0h
belong to the set Gh"GWV
h, and is the solution of approximated bending
limit problem
Find u0h3G
h"GWV
haf(u0
h, v)"Sf, vT ∀v3G
h.
We have the following diagram:
ueh3V
hh?0&" ue3V
Be?0 Be?0
u0h3G
hu03G
(2.4)
If the diagram (2.4) is commutative, the scheme is said robust in the sense of Babuskaand Suri [2], then the approximation is membrane locking free. Unfortunately, this isnot the case since G
his always reduced to M0N for some surfaces (most of the surfaces in
fact), see [12] for some examples, including the case of the hyperbolic paraboloid.
Membrane Locking of Elastic Shells 1297
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Actually in [12], the incompatibility Gh"M0N is shown by proving
G3 WPn(R2)"M0N, where P
n(R2) is the set of polynomial displacements of order n, for
any n. In other words, the incompatibility and thus the non-robustness is shownwithout considering the kinematic boundary conditions. Nevertheless, the boundaryconditions can also be involved to prove G
h"M0N by a kind of propagation element
in the case of hyperbolic shell, as in [6], similar to that of [1]. In fact the causes ofincompatibility are obviously multiple.
Anyway, although such identi"cation should be useful, possibly indicating thealleviation of the locking, as using a mesh topology, taking into account some specialgeometric properties (asymptotic lines) of the shell, see [7], the incompatibility shownin [12] are rhedibitory since it is independent of the boundary conditions, the meshtopology or the order of polynomials involved, even for non-conformal schemes suchas widely used DKT (Discrete Kircho! Triangle).
This somehow pessimistic assertion underlines the importance of bench-mark. Itseems that until recently, the inhibited or non-inhibited character was not taken inaccount, although it plays an essential role in the membrane locking phenomenon, see[12, 7]. To our knowledge there is no valid bench-mark for a non-inhibited hyperbolicshells.
2.3. Benchmarks for membrane locking
On the basis of diagram (2.4), we consider the limit bending problem and a set ofuehLV
h, solution of Koiter's approximated problem with (2.3), for decreasing values
of the mesh step h and of the thickness e.By "xing the thickness e, the value ue
hconverge as hP 0. From this convergence we
may extrapolate a limit value ue0, or at least take the value given by the "nest mesh.
According to diagram (2.4), the &extrapolated' solutions ue0
converge to the bendinglimit solution, even if the convergence might appear &slow' with respect to thethickness. If this is the case, the accuracy of the results obtained is shown and can beconsidered as a valid bench-mark.
On another hand by "xing h and making eP 0, one will "nd the numerical solutiongo away from the solution of the bending problem (in fact, as in most cases thesubspace G
h"M0N, the results will go to zero). It is the membrane locking, even
though this might appear for very small thickness.From this point of view, the solution of the bending limit problem constitutes
a validation test.
3. The bending limit problem for non-inhibited shells
In this section, we study the limit problem of non-inhibited shells, when thethickness e converge to zero (for external applied forces fe"e3f ). As we recalled in thepreceding section, it is a problem lying in the subset G of inextensional displacements(or bendings). Using a new approach of this theory, we give a new formulation of thelimit bending problem. This new formulation will be the key to our resolution, explicitfor a case of hyperbolic paraboloid champed along a generator.
1298 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

3.1. A rotation approach of the inextensional displacement theory.¹he derived bending system
We describe here a rotation approach of the inextensional displacement theory. Ithas been introduced in [9] to obtain rigidity theorems on edges. We refer to [10] fora thorough description of this topic.
Let u be a displacement on a surface S given by a map (), r). We recall that u is saidto be inextensional if it leaves the intrinsic metrics unchanged, that is to say ifcab(u)"0. More precisely, if aJ ab denotes the coe$cients of the "rst fundamental formof the deformed surface, we have
2cab(u)"aJ ab!aab"(aa#u,a) . (ab#u
,b)!aab.
So that, by linearization, any inextensional displacement u must satisfy the bendingsystem
aa . u,b#ab . u,a"0. (3.1)
Classically, see [23], there is a unique vector "eld x, called associated in"nitesimalrotation "eld satisfying the relations:
u,1"x'a
1,
u,2"x'a
2.
(3.2)
One can see that rigid displacements are trivial solutions of the bending system (3.1)and the associated rotation "elds are the constant vectors.
Writing the Schwarz equality (compatibility equality) u,12
"u,21
, we see thatx necessarily satis"es the relation
x,1'a
2"x
,2'a
1. (3.3)
Conversely, we have
Proposition 3.1. Any vector ,eld x satisfying (3.3) determine a unique inextensionaldisplacement u (modulo a rigid displacement). By quadrature, we have explicitly:
u(x, y)"Py1
0
x,1
(t, y)'[r (x, y)!r(t, y)] dt
#Py2
0
x,2
(0, s)'[r(x, y)!r (0, s)] ds. (3.4)
Let us introduce the notation xa for the partial derivatives of a rotation "eld x:
xa"x,a .
Membrane Locking of Elastic Shells 1299
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Taking the scalar product of (3.3) with aa , we have
wa . a3"0.
So that;
Proposition 3.2. ¹he partial derivatives of a rotation ,eld on a surface S are tangential to S.
Let us express the "elds wa by their contravariant components:
wa"w1aa1#w2aa2 .
As the wa must satisfy the compatibility equality w1,2
"w2,1
, the componentswba satisfy a "rst order partial di!erential equation system, see [10]:
w11,2
#!12jwj
1"w1
2,1#!1
1,jwj2, (3.5a)
w21,2
#!22jwj
1"w2
2,1#!2
1jwj2, (3.5b)
b12
w11#b
22w21"b
11w12#b
12w22, (3.5c)
moreover, from (3.3), we obtain
w11#w2
2"0. (3.5d)
System (3.5) is called derived bending system.
Proposition 3.3. ¹he subset G3 "Mu3H2/cab(u"0)N of inextensional displacements onthe surface S is isomorphic to the space
R3 (S)"G(w
1, w
2)3L2]L2/the contravariant components of
w1
and w2
satisfy the derived bending system (3.5)H.=e denote the bijection between R3 (S) and G3 , for any u3G3 , by
R(u)"(w1, w
2)3R3 (S)
or abusively (but without ambiguity)
R(u)"(wba ).
We de"ne also the corresponding isomorphic space of kinematically admissibleinextensional displacements
R(S)"R(G).
Remark 2. The bending system (3.1) (hence, the derived bending system) is equivalent,in a sense to be precise, to a partial di!erential equations system of total order 2, thecharacteristic lines of which coincide with the asymptotic lines of the consideredsurface S. In other words, if S is a hyperbolic (resp. elliptic) surface then the nature ofthe bending system will be hyperbolic (resp. elliptic). The same rule stands for thederived bending system [10, 17].
1300 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

3.2. Expression of the linearized change of curvature tensor oab for an inextensionaldisplacement
In this subsection, we present the very simple expression the tensor oab(u) takeswhen u is an inextensional displacement. It is a result "rst announced in [11]. This isthe key to our alternative formulation of the bending limit problem.
Proposition 3.4. ¸et u be an inextensional displacement on the considered surface S andlet oab(u) be the tensor of curvature variation. If we denote by wja the contravariantcomponents of (w
1, w
2)"R(u), the partial derivatives of the associated rotation ,eld x,
we have
o11
(u)"!w21Ja,
o22
(u)"#w12Ja,
o12
(u)"12
(w11!w2
2) Ja. (3.6)
Proof. By de"nition the change of curvature tensor oab is the linearized di!erencebetween bab and bab , where bJ ab are the second fundamental form coe$cients of thedeformed surface.
bJ ab"a83. a8 a,b
"(a3#x'a
3) . (aa,b#u
,ab )
"(a3#x'a
3) . (aa,b#(x'aa), b)
"a3. aa,b#(x'a
3) . aa,b#a
3. (x'aa),b#(x'a
3) . (x'aa),b
"bab#(x'a3) . aa,b#a
3. (x'aa,b )#a
3. (wb'aa)#(x'a
3) . (x'aa),b
"bab#a3. (wb'aa)#(x'a
3) . (x'aa),b .
Thus, the linearized variation oab of the coe$cients of the second fundamental form is
oab(u)"a3. (wb'aa)"a
3. [(wjaaj)'aa]. (3.7)
Then, developing the last equality gives expressions of (3.6). K
3.3. Alternative formulation of the bending limit problem
With the new expressions of the change of curvature tensor oab , we are able to givean alternate expression of the bending limit problem. Our main idea is to move theproblem from the set of inextensional displacements G to the set of partial derivativesof rotation "elds R(S).
The bending limit problem (2.2) is rewritten as
Find wja3R(S) such that
PP)AabjkcalwlbcjpwJ pkJa dx dy"(f, u8 ) ∀wJ pk3R(S)
(3.8)
Membrane Locking of Elastic Shells 1301
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Fig. 1. A hyperbolic paraboloid
where (wba )"R(u) and (wJ ba )"R(u8 ) and with
(cab)"Ja A0
!1
1
0B . (3.9)
One can notice that cab de"nes an anti-symmetric covariant tensor of rank 2.Apparently, the alternate formulation (3.8) is not less complex than the original one
(2.2), the di$culties being moved from the space G to the space R(S), and there is stilla di!erential system to be satis"ed. In fact, the wining move is in the new expression ofthe change of curvature tensor oab , as it contains no derivatives on the new unknowns(wba ).
4. Resolution of the bending limit problem
In this section, we solve the bending limit problem, using formulation (3.8), inspecial cases where the middle surface is a hyperbolic paraboloid. The reason of thischoice is mainly that it is a hyperbolic surface example for which we are able to solvethe bending limit problem.
We study two con"gurations of hyperbolic paraboloid with di!erent kinematicboundary conditions (see Fig. 1). The surface is clamped along an asymptotic line inthe "rst case (con"guration A) and clamped along a boundary transverse the asymp-totic lines in the second case (con"guration B), giving, respectively, a totally non-inhibited shell and a partially inhibited shell. It illustrates the essential role played byasymptotic lines in the membrane locking problem, see [10, 12, 7].
Let S, all along the rest of this paper, be a hyperbolic paraboloid. We de"ne S withthe mapping (), r):
r(x, y)"xe1#ye
2#cxye
3,
1302 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

where ) is a domain of R2 and c is a given real constant. We can vary the geometry bytaking di!erent values of c. For instance with small values of c, the corresponding shellis shallow (not recommended as a test for the membrane locking).
S is a hyperbolic surface with the particularity to be double ruled. Thus theasymptotic lines are the generators, see [22]. With this mapping, the expressions ofvarious geometrical coe$cients are:
a1"(1, 0, cy), a1"
1
a(1#(cx)2, !cxcy, cy),
a2"(0, 1, cx), a
2"
1
a(!cxcy, 1#(cy)2, cx),
a3"
1
Ja(!cy, !cx, 1), a3"
1
Ja(!cy, cx, 1),
a"1#(cx)2#(cy)2,
a11"1#(cy)2, a
12"cxcy, a
22"1#(cx)2,
a11"1
a(1#(cx)2), a12"
1
a(cxcy), a22"
1
a(1#(cy)2),
b11"0,
b12"
c
Ja, b
22"0,
!112"
1
a(c2y), !2
12"
1
a(c2x), !baa"0
and the elasticity coe$cients for homogeneous and isotropic elastic shells are
A1111"E
12(1!l2)(1#(cx)2)2
a2,
A1122"E
12(1!l2)((cx)2(cy)2#la)
a2,
A2222"E
12(1!l2)(1#(cy)2)2
a2.
We do not write the coe$cients A1112, A1212 or A1222 as we shall not use them in thesequel.
4.1. Inextensional displacements of a hyperbolic paraboloid
The description of inextensional displacement on hyperbolic paraboloid clampedalong a generator (asymptotic line) is classical, see [13]. We shall recall it in theframework of the rotational approach of inextensional displacement theory given insection 3.1.
Let u be an inextensional displacement on S, let x be its associated rotation "eldand let wjb"R(u) be the contravariant components of the partial derivatives of x.According to section 3.1 the coe$cients ujb satisfy the derived bending system (3.5)
Membrane Locking of Elastic Shells 1303
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

which becomes in this special case
w11,2
"w12,1
,
w21,2
"w22,2
, (4.1)
w11"w2
2
and with (3.5d) (w11#w2
2"0), we obtain
w11"0,
w22"0, (4.2)
w12,1
"0,
w21,2
"0.
Thus (if ) is convex) R3 (S) (hence, the subspace G3 of inextensional displacement)appears isomorphic to a product of two scalar functions spaces of one variableL2y]L2
x. More precisely, for any inextensional displacement u3H2, there is a unique
couple of functions (/u1, /u2
)3L2y]L2
xsuch that the partial derivatives of the asso-
ciated rotation "eld x are given by
x,1
(x, y)"/u2(x)a
2(x, y),
x,2
(x, y)"/u1(y)a
1(x, y). (4.3)
Then, applying Proposition 3.1 we obtain, modulo a rigid displacement
u(x, y)"Px
0
/u2(t) (e
2#ctye
3)'[(x!t)e
1#cy(x!t)e
3] dt
#Py
0
/u1(s)(e
1#cse
3)'[xe
1#(y!s)e
2#cxye
3] ds.
It su$ces then to develop the last expression to obtain:
Proposition 4.1. R(S) is isomorphic to L2y]L2
x. For any inextensional displacement u on
the hyperbolic paraboloid S, there is a unique couple (/u1, /u2
)3L2y]L2
x, such that
modulo a rigid displacement, we have
u(x, y)"cy'u2(x)!c(u1
(y)]e1#[c(u2
(x)!cx'u1(y)]e
2
!['u2(x)!'u1
(y)]e3, (4.4)
where the functions 'ua and (ua are de,ned with /ua by quadrature
'ua(x)"Px
0
/ua (z)(x!z) dz, (4.5)
(ua (x)"Px
0
/ua(z)z (x!z) dz. (4.6)
1304 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

4.2. Con,guration A2A totally, non-inhibited clamped hyperbolic paraboloid
We consider here the case where the hyperbolic paraboloid is de"ned on a rectan-gular domain )"[x
0, x
1]][y
0, y
1] and is clamped all along the generator at
x"x0, denoted as p. The remaining boundary is supposedly free of any constraints.
In the sequel it will be referred to as the con"guration A.With Proposition 4.1, it is easy to show that such clamped shell is totally non-
inhibited, i.e. on any part of the shell there is an admissible inextensional displacementon S di!erent of zero.
Let u be an admissible inextensional displacement on S and let
R(u)"(/u1, /u2
)3L2x]L2
y
be its associated functions corresponding to Proposition 4.1. The boundary conditionon p implies u (x
0, y)"0, then we have also
u,2
(x0, y)"0.
Denoting as before the rotation "eld by x, it follows from (3.2)
x(x0, y)'a
2"0,
which implies, since a2,2
is colinear to a2,
x,2
(x0, y)'a
2"0.
In other words, w12,/u1
vanishes along p. Thus, we obtain the general expression ofadmissible inextensional displacement on the hyperbolic paraboloid S clamped alongthe generator p:
u(x, y)"cy'u2(x)e
1#c(u2
(x)e2!'u2
(x)e3, (4.7)
where 'u2and (u2
are de"ned as in (4.5)}(4.6). Note that (4.7) is exact (i.e. not moduloa rigid displacement).
Conversely, it is clear that for any function /u23L2
x, formula (4.7) determines
a unique admissible inextensional displacement on the hyperbolic paraboloid clam-ped along the generator p.
We have shown that the admissible inextensional displacement subspace G isisomorphic to the space L2[x
0, x
1] and the alternate formulation of the bending limit
problem (4.9) will appear equivalent, in a certain sense, to an ordinary di!erentialequation.
Indeed, with the simpli"cations of the hyperbolic paraboloid case, oab reduces to
o11
(u)"!Ja/u2,
o12
(u)"0, (4.8)
o22
(u)"0.
Membrane Locking of Elastic Shells 1305
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Let f3L2 be the external applied force of the limit bending problem. We have then:
Find u03G such that
PP)A1111(x, y)o
11(u0)o
11(v) a ds"Sf, vT ∀v3G.
(4.9)
Let us decompose f in its Cartesian components
f"fiei.
For any inextensional displacement v on S and its associated function /v2(0)"R(u)
we have, with the notation of (4.5):
Sf, vT"(cyf1!f
3)'v2
(x)#cf2(v2
(x).
The bending limit problem therefore becomes:
Find /u23L2
xsuch that
P)A1111/u2
/v2a ds"P)
[(cyf1!f
3)'v2
#cf2(v2
] Ja ds ∀/v23L2
x.
(4.10)
Introducing some intermediate functions:
a(x)"Py1
y0
A1111 (x, y)aJa dy, (4.11)
F1(x)"P
y1
y0
yf1(x, y) Ja dy,
F2(x)"P
y1
y0
f2(x, y) Ja dy, (4.12)
F3(x)"P
y1
y0
f3(x, y) Ja dy,
An equivalent formulation of the bending limit problem (3.8) writes
Find /u23L2
x(x
0, x
1) such that
Px1
x0
a/u2/v dx"P
x1
x0
[(cF1!F
3)'v#cF
2(v] dx ∀/v3¸2
x(x
0, x
1).
(4.13)
Proposition 4.2. ¹he unique solution of (4.13) is
/u (x)"1
a (x) Px
x0
(cF1(t)!F
3(t)#cxF
2(t)) (x!t) dt. (4.14)
¹he solution of the bending limit problem (2.2) is then obtained from expressions (4.7) and(4.5)}(4.6)
1306 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Proof. Although non-classical, (4.13) is nearly a variational formulation of an ordi-nary second-order di!erential equation. Formally, integrating by parts, we have
Px1
x0
a(x)/u2/v2
dx"Ca/u2
d
dx('v2
)Dx1
x0
!Cd
dx(a/u2
) 'v2Dx1
x0
#Px1
x0
d2
dx2(a(x)/u2
)'u2dx.
As a consequence, since 'v2(x
0)"(d/dx)'v2
(x0)"0, a solution to problem (4.15)
Find (a/u2)3Gg3H2[x
0, x
1]/g(x
1)"
d
dxg(x
1)"0H such that
Px1
x0
d2
dx2(a/u2
)'v2dx"P
x1
x0
[(cF1!F
3)'v2
#cF2(v2
] dx
∀/v23L2[x
0, x
1] (4.15)
is a solution to problem (4.13).We exhibit now the solution of problem (4.15). Let us de"ne the function
[a/u2](x)"(a/
A)!(xa/
B), (4.16)
where
[a/A](x)"P
x
x1
(cF1!F
3) (x!t) dt,
[a/B](x)"P
x
x1
(cF2) (x!t) dt. (4.17)
In order to prove that (4.16) is the solution of (4.15), we note that
d2
dx2(a/
A)"cF
1!cF
3
d2
dx2(a/
B)"cF
2
∀x3[x0, x
1].
Then, taking the product of a/A
and a/B
with 'v2and (v2 and integrating from x
0to
x1, we have
Px1
x0
d2
dx2(a/
A)'v2
dx"Px1
x0
(cF1!F
3)'v2
dx,
Px1
x0
d2
dx2(a/
B) (v2
dx"Px1
x0
cF2(v2
dx.
As (@@v2(x)"x/v2(x), (4.13) follows. K
Membrane Locking of Elastic Shells 1307
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Table 1. Values of the normal component u3
at point (1, 1) for di!erent geometries
c"0.1 c"0.5 c"1 c"2 c"3 c"5
7.5845e-04 6.3066e-04 5.239101e-04 7.4901e-04 1.4429e-03 4.4456e-03
Though our resolution is valid for any given f, we give some numerical examples byconsidering the case of uniform normal applied external forces
fe"e3f"e3fa3, f3R.
In Cartesian components we have
f1"
!cfy
Jd, f
2"
!cfx
Ja, f
3"
f
Ja.
In this case, the intermediate functions become
F1(x)"P
y1
y0
!fcy2 dy"!cf1
3(y
1!y
0) (y2
1#y
0y1#y2
0),
F2(x)"P
y1
y0
!fcx dy"!cfx(y1!y
0),
F3(x)"P
y1
y0
f dy"f (y1!y
0),
a(x)"Py1
y0
E[1#(cx)2 D2
12(1!l2)Jady,
the inextensional displacement u solution of the bending limit problem being con-structed according to expressions (4.7) and (4.5)}(4.6).
In this special case where f is uniform, we are able to determinate the analyticalexpression of the solution /u2
of the equivalent formulation (4.15) of the bending limitproblem. With the help of a formal computation software (Maple or MuPAD) weobtain
a(x)"Ey[1#(cx)2]2
12c(1!l2 )[ln(cy
1#Ja (x, y
1) )!ln(cy
0#Ja(x, y
0))],
/u2(x)"
f (x!x1)2(y
0!y
1)
6a(x)[(cy
1)2#cy
1cy
0#(cx)2#2cxcx
1
#(cy0)2#3]. (4.18)
The solution of the corresponding bending limit problem can then be computed bya simple numerical integration of expressions (4.7) and (4.5)}(4.6).
As an example, E"28,500, l"0.3, x0"!1, x
1"1, y
0"!1, y
0"1, y
0"1,
and f"1, we get for the normal component u3
at point (1,1) of the displacementsolution of the bending limit problem (2.2) for several values of the geometricparameter c as given in Table 1.
1308 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

4.3. Con,guration B2A partially inhibited hyperbolic paraboloid
In this section we consider the hyperbolic paraboloid S de"ned as above, but witha domain ) de"ned with the four summit A, B, C and D of co-ordinates
A : (!1, 0), B : (0, !1),
C : (1, 0), D : (0, 1).
In this example, we impose the clamping along the boundary AB and we assume thatthe rest of the boundary is free of any kinematic constraint. This constitutes con"gura-tion B.
As for con"guration A, we prove "rst that con"guration B is non-inhibited.
Proposition 4.3. ¸et u be an admissible inextensional displacement on the hyperbolicparaboloid S clamped along the boundary AB (con,guration B). According to Proposi-tion 4.1 there is a unique couple (/u2
, /u1)3L2
x[!1, 1]]L2
y[!1, 1] such that u can be
given by
u(x, y)"[cy'u2(x)!c(u1
(y)]e1#[c(u2
(x)!cx'u1(y)]e
2
!['u2(x)!'u1
(y)]e3, (4.19)
where
'ua(z)"Pz
0
/ua(t) (z!t) dt,
(ua (z)"Pz
0
/ua (t)t (z!t) dt.
¹hen we have, furthermore,
/u1(y)"0 ∀y3[!1, 0],
/u2(x)"0 ∀x3[!1, 0]
and conversely.
In other words, the hyperbolic paraboloid clamped along AB is partially inhibitedin the triangle AOB, but admits inextensional displacements, non-trivial on the rest ofthe surface see Fig. 2. In fact, according to the de"nition, it is non-inhibited.
Proof of Proposition 4.3. The clamping along the boundary AB can be considered asa Cauchy data for the bending system, and also for the derived bending system. As ABis transversal to the characteristic lines (generators), the classical uniqueness theoremfor hyperbolic system shows that admissible inextensional displacements vanishnecessarily in the dependence domain, i.e. in the triangle AOB.
According to Proposition 3.1, it su$ces then to verify that inextensional displace-ments de"ned as above vanish in AOB. K
Membrane Locking of Elastic Shells 1309
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Fig. 2. Con"guration B.
In this framework, the limit problem (3.8) is
Find (/u2, /u1
)3L2x]L2
y, such that ∀v3G (v"R~1 (/v2
, /v1))
P)[A1111/u2
/v2#A1122/u2
/v1#A2211/u1
/v2#A2222/u1
/v1] a ds"(f, v),
Introducing the matrix A:
A"AA1111
!A1122
!A1122
A2222 B .
it reads
Find (/u2, /u1
)3L2x]L2
y, such that
P) A/u2/u1B A A
/v2/v1B a ds"Sf, R~1(/v2
, /v1)T ∀(/v2
, /v1)3L2
x]L2
y.
(4.20)
Unlike for the Con"guration A, here we are not able to give an explicit resolution tothe bending limit problem. We shall use "nite element method to give an approximatesolution. Of course, there is no membrane locking since we discretize the space ofinextensional displacements.
Let Gnbe a set of spaces discretizing the space L2
x]L2
y, i.e.
∀(/v2, /v1
)3L2x]L2
y, & (/v
n2, /v
n1)3V
nsuch that
(/vn2
, /vn1
) n?=&" (/v2, /v1
).
1310 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Then the Galerkin approximation onto Gnof the alternate formulation of the bending
limit problem is
Find (/un2
, /un1
)3Vn, such that ∀ (/v
n2, /v
n1)3G
n
P) A/u
n2/u
n1BAA
/vn2
/vn1B a ds"Sf, R~1 (/v
n2, /v
n1)T
(4.21)
Classically, let gi"(/
i2, /
i1) be a basis of G
nand let j
ibe the components of
(/un2
, /un1), solution of the alternate bending limit problem, in this basis:
(/un2
, /un1)"+
i
jigi. (4.22)
We are led to solve the linear system of equation:
+i
aijji"f
jfor all, j (4.23)
where the coe$cients aij
and fjare given by
aij"P) A
/i2
/i1BA A
/j2
/j1B a Ja dx dy, (4.24)
fj"P)
f .R~1(/j2
, /j1
) a Ja dx dy, (4.25)
where the expression of the inextensional displacement R~1(/j2
, /j1
) is given byProposition 4.1:
R~1(/j2
, /j1
)"[cy'j2
(x)!c(j1
(y )] e1
#[c(j2
(x)!cx'j1
(y)] e2!['
j2(x)!'
j1(y)] e
3
with
'ja(z)"P
z
0
/ja(t ) (z!t) dt, (
ja(z)"Pz
0
/ja(t)z (z!t) dt.
Remark 3. Except for the last expression of R~1(/j2
, /j1
), this discretization of thebending limit problem holds for any hyperbolic shell. The principal di$culty wouldstate in the computation of the coe$cients of the right-hand side f
jfor which one has
to solve a Goursat problem for the derived bending system (which is hyperbolic forhyperbolic shells). In the case of a hyperbolic paraboloid, this problem is triviallysolved as in Proposition 4.1, giving last expressions. On the other hand the coe$cientaij
of (4.24) is easily computed by simple numerical integration.Thus, choosing the set of discrete spaces V
n, we are able to construct the solution of
the bending limit problem. For simplicity, we have chosen continuous P1
elements oneach interval [0, 1]. We de"ne a basis g
i"(/
i2, /
i1) of V
nsuch that
gi"(/
i2, 0) for 1)i)n,
gi"(0, /
i1) for n#1)i)2n.
Membrane Locking of Elastic Shells 1311
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Table 2. Values of the normal component u3(E) for various geometries
c"0.1 c"0.5 c"1 c"2 c"3 c"5
1.0284e-05 1.1103e-05 1.3428e-05 2.3835e-05 4.3350e-05 1.1789e-04
The solution in displacement is then given by
u(x, y)"+j
xj[[cy'
j2(x)!c(
j1(y)] e
1
#[c(j2
(x)!cx'j1
(y)]e2!['
j2(x)!'
j1(y)]e
3]. (4.26)
To make the computation of the coe$cient aij, we wrote a code which consists of 12
nodes numerical integration on each triangle of diameter 1/n. It should be noticed thatno e!ort has been made for optimizing of the procedure. We made the computationfor several values of n, until n"64, and solved the linear system (4.23) with the usualGauss method. We chose as limit value the results given with n"64 since weconstated the convergence.
As in the preceding example, with E"28,500, l"0.3, we display some resultsobtained for the normal component of the displacement at point E"(0.5, 0.5), takingvarious values of c, see Table 2.
4.4. Remark on the regularity of the solution of the bending limit problem
Classically, the inextensional displacement is smoother than general displacementin V. As they satisfy the bending system 3.1, one can show that the tangentialcomponents ua3H2 ()), and the normal components u
33H3 ()), [14, 10].
Since the bending limit problem (2.2) stands in the Lax}Milgram framework, forsmooth external applied forces, one may expect additional regularity for the solution.But it is not true as the constrained problem (in subspace R(S)) is not elliptic. In fact,the constraint implies a Lagrange multiplier that modi"es the structure of the partialdi!erential equations [5, 21]. As we shall show, with an example, the limit problem(2.2) does not enjoy local regularity properties which are classical for elliptic problems.We give here an example where the external force is in C=, but the solution of (3.8) isnot in C2.
It is based on the con"guration A of section 4.2, the totally non-inhibited hyperbolicparaboloid clamped along a generator. Consider now, a slightly di!erent con"gura-tion, we shall refer as con"guration AI , of hyperbolic paraboloid such that thenon-inhibited of con"guration AI part is exactly the same as that of con"gurationA (see Fig. 3). If the external forces are the same, say uniform and normal to the surface(f"fa
3), then the corresponding bending limit problems will be identical, giving the
same solution. As an example of con"guration AI we can take a larger rectangle
)3 "[x00
, x1]][y
0, y
1],
1312 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
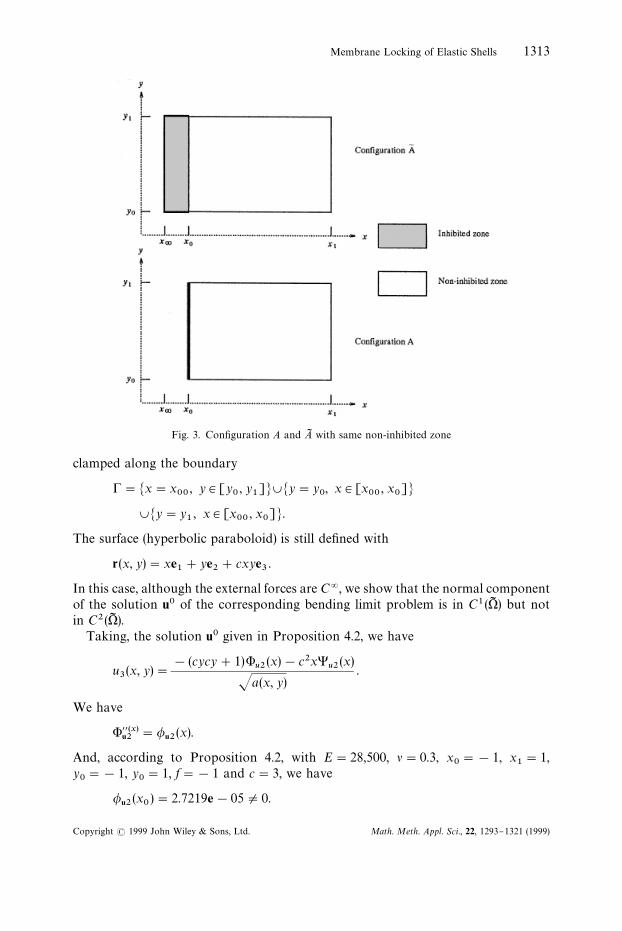
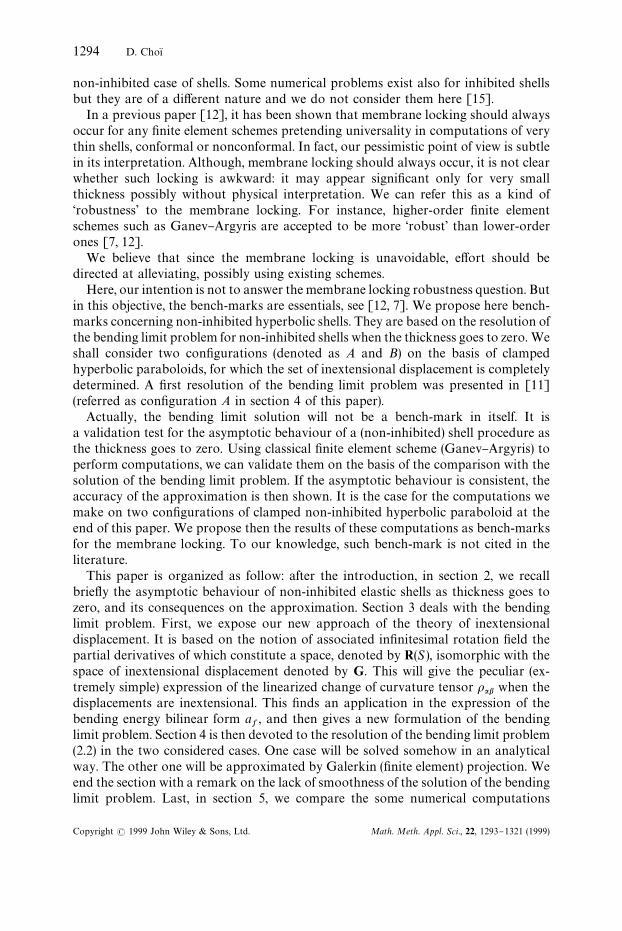
Fig. 3. Con"guration A and AI with same non-inhibited zone
clamped along the boundary
!"Mx"x00
, y3[y0, y
1]NXMy"y
0, x3[x
00, x
0]N
XMy"y1, x3[x
00, x
0]N.
The surface (hyperbolic paraboloid) is still de"ned with
r(x, y)"xe1#ye
2#cxye
3.
In this case, although the external forces are C=, we show that the normal componentof the solution u0 of the corresponding bending limit problem is in C1()3 ) but notin C2 ()3 ).
Taking, the solution u0 given in Proposition 4.2, we have
u3(x, y)"
!(cycy#1)'u2
(x)!c2x(u2
(x)
Ja(x, y).
We have
'@@(x)u2"/u2
(x).
And, according to Proposition 4.2, with E"28,500, l"0.3, x0"!1, x
1"1,
y0"!1, y
0"1, f"!1 and c"3, we have
/u2(x
0)"2.7219e!05O0.
Membrane Locking of Elastic Shells 1313
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Table 3. Correspondence between the Diameter of the triangulation, the number of nodes and the numberof Degrees of Freedom for Ganev}Argyris
Diameter h 1/3 1/5 1/7 1/9 1/11 1/13 1/15 1/17
Nodes 85 221 421 685 1013 1405 1625 2281DoF 600 1532 2896 4692 6920 9580 12,672 16,196
This obviously indicates that the second-order partial derivatives in direction x of thenormal component u
3is di!erent from zero on x"x`
0, whereas for x3[x
00, x
0[, the
solution u0 is zero. This shows a discontinuity of the second-order partial derivative ofthe normal component along the curve at x"x
0.
5. Numerical tests for the membrane locking on computation of non-inhibitedhyperbolic shells
In this section, we present some numerical results concerning the Koiter's problem(2.1) with applied external forces (2.3) by classical "nite element and we compare themwith the solution of the corresponding bending limit problem (2.2) of con"gurationA and B of section 4.
Our purpose here is to present validated computations of non-inhibited hyperbolicshells. For that we chose a "nite-element and a mesh topology, which we believe aremore robust with respect to membrane locking in the case considered. This does notmean that the chosen element is membrane locking free or is the best element forcomputation of thin elastic shells.
On another hand, it can be more interesting to consider other widely used schemes,such as DKT or 3D general shell elements and chose various mesh topology and showhow and when the membrane locking appears awkward in the computations. This canbe done separately using the validated computations we present here for comparison.
We shall use the Ganev}Argyris' scheme implemented on the INRIA's MODULEFcode. The computations were performed on SUN's Solaris Ultra-SPARC. We usednumerical integration with 12 nodes, exact for polynomial of order 6.
The Ganev}Argyris' scheme is a conforming scheme of high-order polynomialswhich uses the P
4-Ganev triangle for the approximation of the tangent components of
the displacement, and the P5-Argyris triangle for the normal component; there are
15#15#21"51 degrees of freedom in each triangle. The order of convergence isO(h4), where h is the diameter of the triangulation, preserved with the reducedintegration scheme exact for polynomial of order 6. We refer to [3] for a completedescription of the method.
Following diagram (2.4) we shall consider various values of the thickness e withvarious values of the mesh step h (see Table 3).
The meshes chosen for our study follow the topological disposition of Figs 4 and 5,for the case of totally non-inhibited hyperbolic paraboloid (con"guration A) and thecase of partially non-inhibited hyperbolic paraboloid (con"guration B) respectively. Itshould be noticed that in both cases the triangles follow the asymptotic lines (i.e. the
1314 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
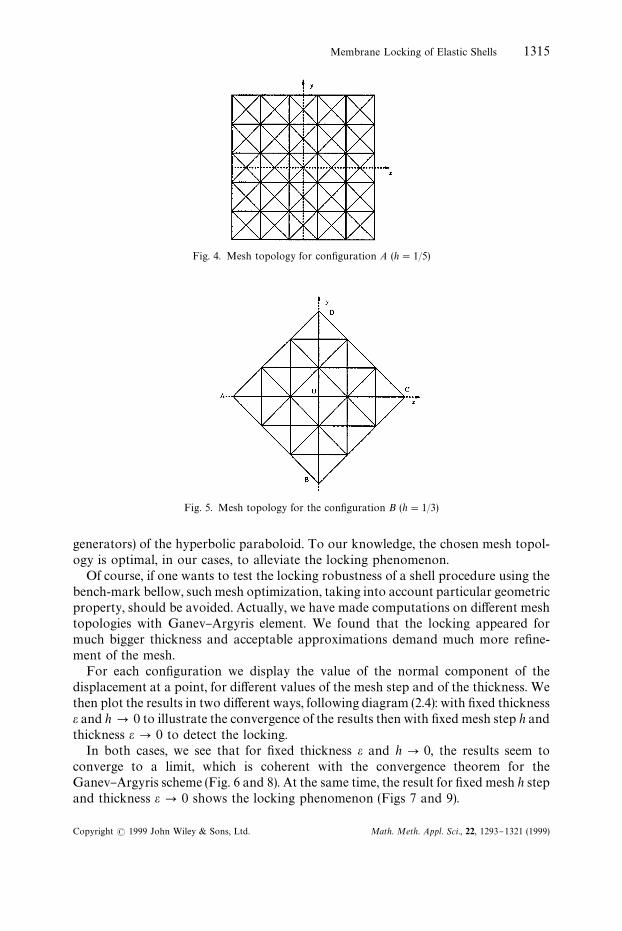
Fig. 4. Mesh topology for con"guration A (h"1/5)
Fig. 5. Mesh topology for the con"guration B (h"1/3)
generators) of the hyperbolic paraboloid. To our knowledge, the chosen mesh topol-ogy is optimal, in our cases, to alleviate the locking phenomenon.
Of course, if one wants to test the locking robustness of a shell procedure using thebench-mark bellow, such mesh optimization, taking into account particular geometricproperty, should be avoided. Actually, we have made computations on di!erent meshtopologies with Ganev}Argyris element. We found that the locking appeared formuch bigger thickness and acceptable approximations demand much more re"ne-ment of the mesh.
For each con"guration we display the value of the normal component of thedisplacement at a point, for di!erent values of the mesh step and of the thickness. Wethen plot the results in two di!erent ways, following diagram (2.4): with "xed thicknesse and hP 0 to illustrate the convergence of the results then with "xed mesh step h andthickness eP0 to detect the locking.
In both cases, we see that for "xed thickness e and hP 0, the results seem toconverge to a limit, which is coherent with the convergence theorem for theGanev}Argyris scheme (Fig. 6 and 8). At the same time, the result for "xed mesh h stepand thickness eP0 shows the locking phenomenon (Figs 7 and 9).
Membrane Locking of Elastic Shells 1315
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
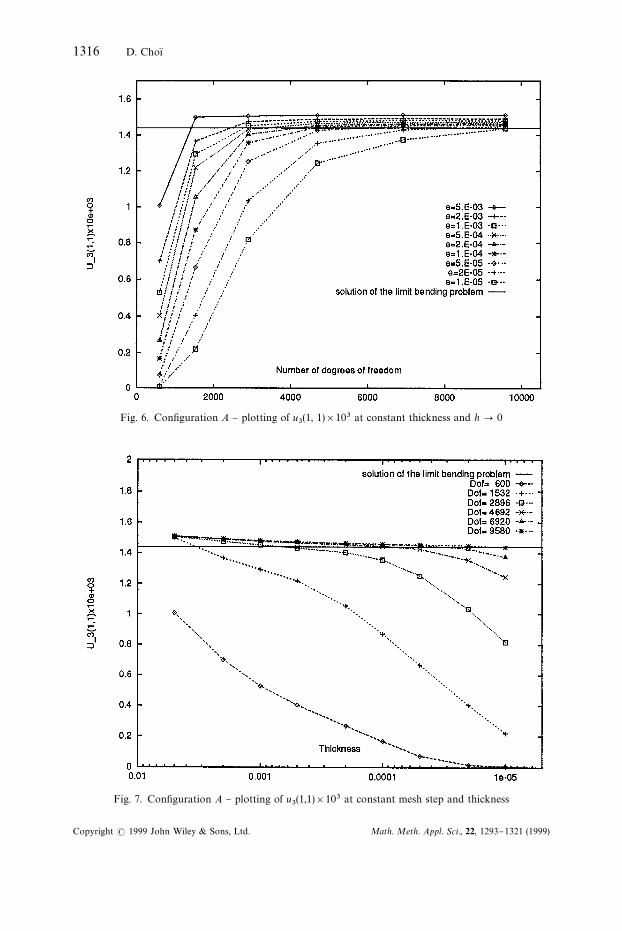
Fig. 6. Con"guration A } plotting of u3(1, 1)]103 at constant thickness and hP0
Fig. 7. Con"guration A } plotting of u3(1,1)]103 at constant mesh step and thickness
1316 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

Fig. 8. Con"guration B } plotting of u3(E)]105 at constant thickness hP 0
Fig. 9. Con"guration B } plotting of u3(E)]105 at constant mesh step and thickness eP0
Membrane Locking of Elastic Shells 1317
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
5.1. Con,guration A2Case of the totally non-inhibited hyperbolic paraboloid
We recall that the shell is clamped along a generator and admits inextensionaldisplacement everywhere, see Proposition 4.2. As in section 4.2, we take c"3,E"28,500, l"0.3, x
0"!1, x
1"1, y
0"!1 and y
0"1 and f e"e3a
3. We dis-
play the values of the normal component at point (1,1) in Table 4 and we plot them inFigs 6 and 7. In this case the value at (1,1) of the normal component of the solution u0
of the bending limit problem is
u03"1.4429]10~3
From Fig. 6 one can see the convergence of the displacement for "xed thickness asthe mesh step hP 0. We conclude that the results obtained by Ganev}Argyris areaccurate, for the "nest mesh, even when e"10~5.
It is interesting to notice that the convergence (when the thickness eP 0 towardsthe solution of the bending limit problem is very quick: even for e"10~2 thedi!erence with the limit solution is only 6 per cent.
Looking at Fig. 7, except for the "nest meshes h"1/13 and 1/11, one can see thelocking e!ect as the thicknessP0. In fact, for the mesh h"1/13, the locking is presentbut appears awkward only for thicknesses smaller than e"10~5.
5.2. Con,guration B2case of the partially non-inhibited hyperbolic paraboloid
We consider here the con"guration B described in section 4.3. It is the hyperbolicparaboloid de"ned by the four points
A : (!1, 0), B : (0, !1),
C : (1, 0), D : (0, 1).
The paraboloid is clamped along the border AB. The shell is non-inhibited, but hasa inhibited part ABO, see Proposition 4.3 and Fig. 2.
We take c"3, E"28,500, l"0.3 and f e"e3a3.
Remark 4. This example is very similar to the one studied in [12, 6], recommended asa test for shell procedures in [7].
We display the values taken by the normal component at point (0.5, 0.5), in Table 5and we plot them in Figs. 8 and 9. In this case the value at (0.5, 0.5) of the normalcomponent of the solution u0 of the bending limit problem is
u03(0.5, 0.5)"4.3350]10~5.
From Fig. 8 point of view, one can see that for each "xed thickness e the values ofu3(0.5, 0.5) converge to a limit which we can extrapolate. We then see that these
extrapolated limit converges to the value given by the solution of the bending limitproblem. This validates the results obtained for the "nest mesh (h"1/17), at least forthickness e'10~4. For smaller thickness, the shift of convergence due to locking istoo important, see Fig. 9.
1318 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.
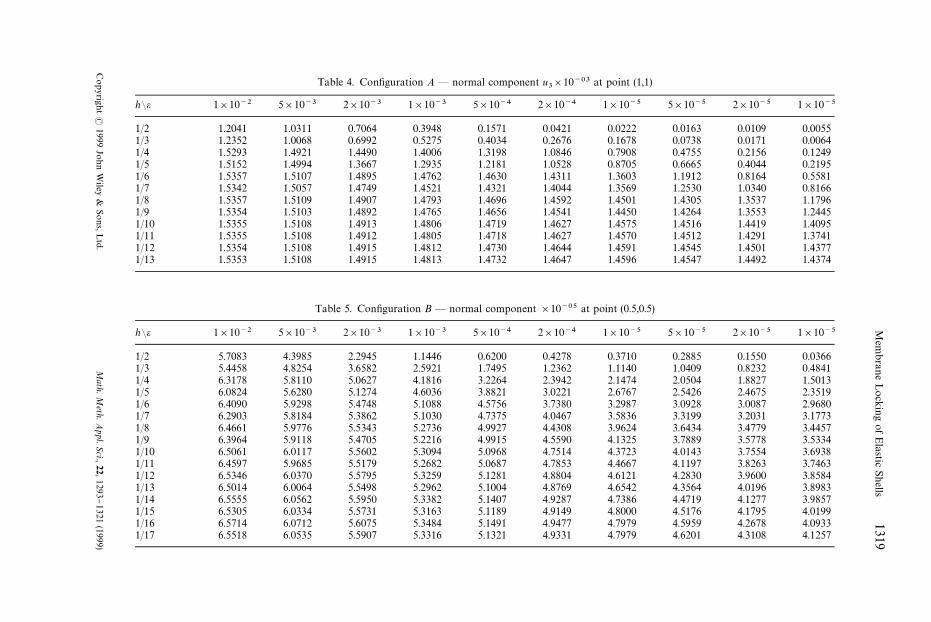
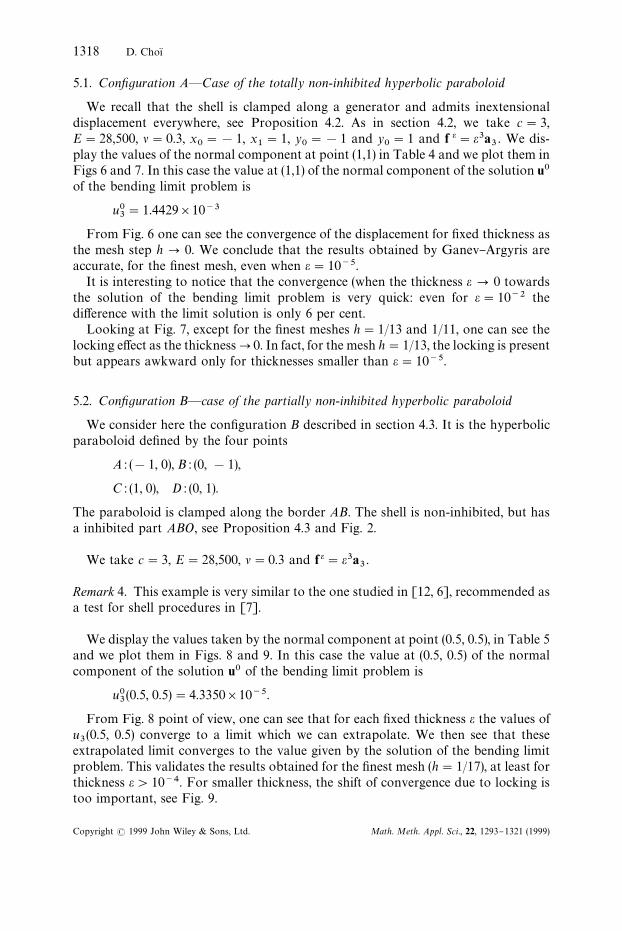
Table 4. Con"guration A * normal component u3]10~03 at point (1,1)
hCe 1]10~2 5]10~3 2]10~3 1]10~3 5]10~4 2]10~4 1]10~5 5]10~5 2]10~5 1]10~5
1/2 1.2041 1.0311 0.7064 0.3948 0.1571 0.0421 0.0222 0.0163 0.0109 0.00551/3 1.2352 1.0068 0.6992 0.5275 0.4034 0.2676 0.1678 0.0738 0.0171 0.00641/4 1.5293 1.4921 1.4490 1.4006 1.3198 1.0846 0.7908 0.4755 0.2156 0.12491/5 1.5152 1.4994 1.3667 1.2935 1.2181 1.0528 0.8705 0.6665 0.4044 0.21951/6 1.5357 1.5107 1.4895 1.4762 1.4630 1.4311 1.3603 1.1912 0.8164 0.55811/7 1.5342 1.5057 1.4749 1.4521 1.4321 1.4044 1.3569 1.2530 1.0340 0.81661/8 1.5357 1.5109 1.4907 1.4793 1.4696 1.4592 1.4501 1.4305 1.3537 1.17961/9 1.5354 1.5103 1.4892 1.4765 1.4656 1.4541 1.4450 1.4264 1.3553 1.24451/10 1.5355 1.5108 1.4913 1.4806 1.4719 1.4627 1.4575 1.4516 1.4419 1.40951/11 1.5355 1.5108 1.4912 1.4805 1.4718 1.4627 1.4570 1.4512 1.4291 1.37411/12 1.5354 1.5108 1.4915 1.4812 1.4730 1.4644 1.4591 1.4545 1.4501 1.43771/13 1.5353 1.5108 1.4915 1.4813 1.4732 1.4647 1.4596 1.4547 1.4492 1.4374
Table 5. Con"guration B * normal component ]10~05 at point (0.5,0.5)
hCe 1]10~2 5]10~3 2]10~3 1]10~3 5]10~4 2]10~4 1]10~5 5]10~5 2]10~5 1]10~5
1/2 5.7083 4.3985 2.2945 1.1446 0.6200 0.4278 0.3710 0.2885 0.1550 0.03661/3 5.4458 4.8254 3.6582 2.5921 1.7495 1.2362 1.1140 1.0409 0.8232 0.48411/4 6.3178 5.8110 5.0627 4.1816 3.2264 2.3942 2.1474 2.0504 1.8827 1.50131/5 6.0824 5.6280 5.1274 4.6036 3.8821 3.0221 2.6767 2.5426 2.4675 2.35191/6 6.4090 5.9298 5.4748 5.1088 4.5756 3.7380 3.2987 3.0928 3.0087 2.96801/7 6.2903 5.8184 5.3862 5.1030 4.7375 4.0467 3.5836 3.3199 3.2031 3.17731/8 6.4661 5.9776 5.5343 5.2736 4.9927 4.4308 3.9624 3.6434 3.4779 3.44571/9 6.3964 5.9118 5.4705 5.2216 4.9915 4.5590 4.1325 3.7889 3.5778 3.53341/10 6.5061 6.0117 5.5602 5.3094 5.0968 4.7514 4.3723 4.0143 3.7554 3.69381/11 6.4597 5.9685 5.5179 5.2682 5.0687 4.7853 4.4667 4.1197 3.8263 3.74631/12 6.5346 6.0370 5.5795 5.3259 5.1281 4.8804 4.6121 4.2830 3.9600 3.85841/13 6.5014 6.0064 5.5498 5.2962 5.1004 4.8769 4.6542 4.3564 4.0196 3.89831/14 6.5555 6.0562 5.5950 5.3382 5.1407 4.9287 4.7386 4.4719 4.1277 3.98571/15 6.5305 6.0334 5.5731 5.3163 5.1189 4.9149 4.8000 4.5176 4.1795 4.01991/16 6.5714 6.0712 5.6075 5.3484 5.1491 4.9477 4.7979 4.5959 4.2678 4.09331/17 6.5518 6.0535 5.5907 5.3316 5.1321 4.9331 4.7979 4.6201 4.3108 4.1257
Mem
bran
eL
ock
ing
ofE
lasticShells
1319
Math.M
eth.Appl.
Sci.,22,
1293}1321
(1999)C
opyrigh
t(
1999Jo
hn
Wiley
&Sons,L
td.

We also note that the convergence towards the solution of the bending limitproblem is not as fast as in the preceding case with rectangular shape. This is due tothe fact that the limit solutions don't take into account the inhibited zone. Twodi!erent problems in this con"guration, with same external forces and boundaryconditions on identical non-inhibited zone, give the same bending limit solution as insection 4.4.
Remark 5. In [12] some computations were made on a similar case of non-inhibitedhyperbolic shell with reduced numerical interaction. It was asserted that low precisionschemes eliminate the locking in the sense that the results don't converge to zero, butgive wrong approximation in comparison with converging higher precision schemes.The validation here, comforts the assertion that reduced numerical integration is nota remedy for the locking.
References
1. Akian, J-L. and Sanchez-Palencia, E. &Approximation de coques eH lastiques minces par facettes planes.phenomenes de blocage membranaire', C.R. Acad. Sci. SeH r. I, 315, 363}369 (1992).
2. Babuska, L. and Suri, M. &On locking and robustness in the "nite element methods', SIAM J. Numer.Anal., 29, 261}293 (1992).
3. Bernadou, M. MeH thodes d1eH leH ments ,nis pour les problemes de coques minces, Masson, Paris, 1994.4. Bernadou, M. and Ciarlet, P. G. Sur l'ellipticiteH du modele lineH aire des coques de w. t. koiter, Computing
Methods in Sciences and Engineering, Lectures notes in Economics nad Math. Systems, Springer, Berlin,1976, pp. 89}136.
5. Brezzi, F. GeH rard, P., and Sanhez-Palencia, E., Remarks on ellipticity and regularity for shells and otherconstrained systems, C.R. Acad. Sci. SeH r. I, 326, 1155}1162 (1998).
6. Chapelle, D., Etude de pheH nomene de verrouillages numeH rique pour les problemes de coques minces',Ph.D. ¹hesis, Universite Pierre et Marie Curie (Paris VI), 1996. Laboratoire des Ponts et ChausseH es.
7. Chapelle, D., and Bathe, K. J. &Fundamental considerations for the "nite element analysis of shellstructures', Comp. Struct., 66, 19}36 (1998).
8. Chenais, D. and Paumier, J.-C., &On the locking phenomenon for a class of elliptic problems',Numerische Mathematik, 67, 427}440 (1994).
9. ChomK , D., &RigiditeH in"niteH simale d'un type de pli d'une surface en deH placement inextensionnel', C. R.Acad. Sci. SeH r. I, 317, 323}327 (1993).
10. ChomK , D. &On geometrical rigidity of surfaces. application to the theory of thin elastic shells', Math.Models Meth. Appl. Sci. 7(4), 507}555 (1997).
11. ChomK , D. &ReH solution du probleme limite des coques elastiques en #exion dans le cas d'un parabolomKdehyperbolique', C.R. Acad. Sci. SeH rie II b, 324, 427}434 (1998).
12. ChomK , D., Palma, F. J., Sanchez-Palencia, E., and Vilarino, M. A. &Remarks on membrane locking in the"nite element computation of very thin elastic shells', ModeH lisation MatheH matique et AnalyseNumeH rique, 32, 131}152 (1998).
13. Darboux, G., ¹heH orie geH neH rale des surfaces, Vol. 4, Gauthier-Villars, Paris, 1896.14. Geymonat, G. and Sanchez-Palencia, E., &On rigidity of certain surfaces with edges and application to
shell theory', Arch. Rat. Mech. Anal., 129, (1995), pp. 11}45.15. Lions, J.-L. and Sanchez-Palencia, E., &Problemes aux limites sensitifs', C. R. Acad. Sci. Ser. I, 319,
1021}1026, (1995).16. Pitkaranta, J., &The problem of membrane locking in "nite elements analysis of cylindrical shells'.
Numerische Mathematik, 61, 523}542 (1992).17. Sanchez-Hubert, J. and Sanchez-Palencia, E. Coques eH lastiques minces: ProprieH teH s asymptotiques,
Masson, Paris 1997.18. Sanchez-Palencia, E. &Statique et dynamique des coques minces, I et II', C.R. Acad. Sci. Paris SeH r. I,
Vol. n0 309, 411}417 et 531}537 (1989).19. Sanchez-Palencia, E. &Passage a la limite de l'eH lasticiteH tridimensionnelle a la theH orie asymptotique des
coques minces', Compt. Rend. Acad. Sci. Paris, SeH r. II', 311, 909}916 (1990).
1320 D. ChomK
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.

20. Sanchez-Palencia, E. &Asymptotic and spectral properties of a class of singular-sti! problems', J. Math.Pures. Appl., 71, 379}406 (1992).
21. Sanchez-Palencia, E. &On sensitivity and related phenomena in thin shells which are not geometricallyrigid', Math. Models Meth. Appl. Sci., Vol. n0 9, 139}160 (1998).
22. Spivak, M. A Comprehensive Introduction to Di+erential Geometry, Vol. 5, Publish or Perish Inc.,Berkelely, CA 1975.
23. Vekua, I. N., Generalized Analytic Functions, Pergamon Press, New York, 1959. English translation.
Membrane Locking of Elastic Shells 1321
Math. Meth. Appl. Sci., 22, 1293}1321 (1999)Copyright ( 1999 John Wiley & Sons, Ltd.