Computational Ballistics III
249
Transcript of Computational Ballistics III


WIT Press publishes leading books in Science and Technology.Visit our website for the current list of titles.
www.witpress.com
COMPUTATIONAL
WITeLibraryHome of the Transactions of the Wessex Institute.
Papers presented at Computational Ballistics III are archivedin the WIT eLibrary in volume 45 of WIT Transactions on
Modelling and Simulation (ISSN 1743-355X). The WIT eLibrary provides theinternational scientific community with immediate and permanent access to individual
papers presented at WIT conferences.http://library.witpress.com.
BALLISTICS III

THIRD INTERNATIONAL CONFERENCE ON
COMPUTATIONAL BALLISTICS
COMPUTATIONAL BALLISTICS III
ORGANISED BY
The Wessex Institute of Technology, UK
SPONSORED BYWIT Transactions on Modelling & Simulation
INTERNATIONAL SCIENTIFIC ADVISORY COMMITTEE
CONFERENCE CHAIRMEN
C.A. BrebbiaWessex Institute of Technology, UK
A.A. MottaBrazilian Navy Research Institute, Brazil
C. E. AndersonR. BarauskasM. BeppuJ. L. Drummond AlvesD. Greatrix
N. IshikawaY. KatoS. KubotaW-S. Lee
D. W. PepperA. PerattaH. RotheJ. Sahu

WIT Transactions on Modelling and Simulation
Editorial Board
Transactions Editor
Carlos BrebbiaWessex Institute of Technology
Ashurst Lodge, AshurstSouthampton SO40 7AA, UKEmail: [email protected]
C AlessandriUniversita di Ferrara
ItalyJ Baish
Bucknell UniversityUSA
D E BeskosUniversity of Patras
GreeceJ A Bryant
University of ExeterUK
M A CeliaPrinceton University
USAJ J Connor
Massachusetts Institute of TechnologyUSA
D F CutlerRoyal Botanic Gardens
UKG De Mey
Ghent State UniversityBelgiumQ H Du
Tsinghua UniversityChina
A El-ZafranyCranfield University
UKS Finger
Carnegie Mellon UniversityUSA
M J FritzlerUniversity of Calgary
CanadaG S Gipson
Oklahoma State UniversityUSA
M A AthertonSouth Bank University
UKC D Bertram
The University of New South WalesAustralia
M BonnetEcole Polytechnique
FranceM B Bush
The University of Western AustraliaAustralia
A H-D ChengUniversity of Mississippi
USAD E Cormack
University of TorontoCanada
E R de Arantes e OliveiraInsituto Superior Tecnico
PortugalJ Dominguez
University of SevilleSpain
S ElghobashiUniversity of California Irvine
USAP Fedelinski
Silesian Technical UniversityPoland
J I FrankelUniversity of Tennessee
USAL Gaul
Universitat StuttgartGermanyS Grilli
University of Rhode IslandUSA

K HayamiNational Institute of Informatics
JapanD B Ingham
The University of LeedsUK
D L KarabalisUniversity of Patras
GreeceH Lui
State Seismological Bureau HarbinChina
R A MericResearch Institute for Basic Sciences
TurkeyK Onishi
Ibaraki UniversityJapan
M PredeleanuUniversity Paris VI
FranceS Rinaldi
Politecnico di MilanoItaly
G SchmidRuhr-Universitat Bochum
GermanyX Shixiong
Fudan UniversityChina
V SladekSlovak Academy of Sciences
SlovakiaJ Stasiek
Technical University of GdanskPoland
M TanakaShinshu University
JapanT Tran-Cong
University of Southern QueenslandAustralia
J F V VincentThe University of Bath
UKZ-Y Yan
Peking UniversityChina
G ZharkovaInstitute of Theoretical and Applied
MechanicsRussia
J A C HumphreyBucknell University
USAN Kamiya
Nagoya UniversityJapan
J T KatsikadelisNational Technical University of Athens
GreeceW J MansurCOPPE/UFRJ
BrazilJ Mikielewicz
Polish Academy of SciencesPoland
E L OrtizImperial College London
UKD Qinghua
Tsinghua UniversityChina
T J RudolphiIowa State University
USAA P S SelvaduraiMcGill University
CanadaP Skerget
University of MariborSloveniaT Speck
Albert-Ludwigs-Universitaet FreiburgGermany
S SyngellakisUniversity of Southampton
UKN Tosaka
Nihon UniversityJapan
W S VenturiniUniversity of Sao Paulo
BrazilJ R Whiteman
Brunel UniversityUK
K YoshizatoHiroshima University
Japan

Editors
C.A. BrebbiaWessex Institute of Technology, UK
A.A. MottaBrazilian Navy Research Institute, Brazil
COMPUTATIONALBALLISTICS III

Editors:
No responsibility is assumed by the Publisher, the Editors and Authors for any injury and/or damage to persons or property as a matter of products liability, negligence or otherwise,or from any use or operation of any methods, products, instructions or ideas contained in thematerial herein.
© WIT Press 2007
All rights reserved. No part of this publication may be reproduced, stored in a retrievalsystem, or transmitted in any form or by any means, electronic, mechanical, photocopying,recording, or otherwise, without the prior written permission of the Publisher.
Printed in Great Britain by Athenaeum Press Ltd.
The texts of the papers in this volume were set individually by the authors or under their supervision. Only minor corrections to the text may have been carried out by the publisher.
C.A. BrebbiaWessex Institute of Technology, UK
A.A. MottaBrazilian Navy Research Institute, Brazil
Library of Congress Catalog Card Number:
ISBN: 978-1-84564-077-4ISSN: (print) 1746-4064ISSN: (on-line) 1743-355X
A Catalogue record for this book is availablefrom the British Library.
British Library Cataloguing-in-Publication Data
Published by
WIT Press25 Bridge Street, Billerica, MA 01821, USATel: 978 667 5841; Fax: 978 667 7582E-Mail: [email protected]://www.witpress.com
For USA, Canada and Mexico
WIT PressAshurst Lodge, Ashurst, Southampton, SO40 7AA, UKTel: 44 (0) 238 029 3223; Fax: 44 (0) 238 029 2853E-Mail: [email protected]://www.witpress.com

Preface
The study of computational ballistics is one of the most challenging scientificendeavours, not only because of the diversity of time and space scales involved inpractically all problems, but due to its interdisciplinary character.
Interest in ballistics has also grown considerably recently as a result of thecomplexity of the political and military situation in many parts of the world. Theclassical subdivision into internal, external and terminal ballistics now encompassesnumerous applications on how to model and protect against accidental or man madeexplosions. Many other civilian applications of ballistics are also of growingimportance as impact, crash and blast problems are a by-product of moresophisticated techniques involving dimensions and speeds impossible to achieve afew years ago.
The computational solution of problems in ballistics require specialised tools.Problems with very short time scales are particularly difficult to solve accurately aswell as those involving changing of state or material and geometry conditions.Computational ballistics solutions frequently require substantial computer powerand the use of specialised algorithms.
The lack of sufficient number of open meetings in the field also preclude thesharing of important information amongst researchers and hence a way to avoidchoosing the wrong alternatives. Because of that, conferences such as this areparticularly important.
This conference started in Rio in 2003 and was reconvened in Cordoba, Spain in2005 before the meeting that took place in the New Forest.
This volume covers the following topics:• Fluid flow aerodynamics• Interior ballistics• Terminal ballistics• Experimental mechanics/ballistics and field testing• New developments in computational techniques• Systems and technology
The Editors are grateful to the members of the International Scientific AdvisoryCommittee and other colleagues who helped to review the papers included in thisbook. They are also indebted to all authors for their presentations.
The EditorsNew Forest, 2007

This page intentionally left blank

Contents
Section 1: Fluid flow aerodynamics Unsteady computational fluid dynamics modeling of free-flight projectile aerodynamics J. Sahu...................................................................................................................3 3D transient numerical simulation for sabot separation D. Touati & S. Peles............................................................................................13 Fast calculation of direct fire trajectories taking the earth’s rotation into account W. Roetzel, W. Czarnetzki & T. Maier ................................................................21 Generating an aerodynamic model for projectile flight simulation using unsteady time accurate computational fluid dynamic results J. Kokes, M. Costello & J. Sahu..........................................................................31 Section 2: Interior ballistics Suppression of axial combustion instability in solid rocket motors D. R. Greatrix......................................................................................................57 ICE-ALE modelling for the combustion of homogeneous solid propellant A. Peratta & C. Peratta.......................................................................................67 Stochastic study of 60-mm gun-projectile responses M. Chen...............................................................................................................77

Section 3: Terminal ballistics On the linkage of impact damage to modeling of ballistic performance J. M. Wells...........................................................................................................89 A method to increase the tip velocity of a shaped charge jet using a hollow cavity D. R. Scheffler & W. P. Walters..........................................................................99 A computational viscoelasticity/damage/plasticity model for high-explosive materials P. Rangaswamy & R. M. Hackett......................................................................109 Section 4: Experimental mechanics/ballistics and field testing Offshore platforms survivability to underwater explosions: part I A. A. Motta, E. A. P. Silva, N. F. F. Ebecken & T. A. Netto .............................123 Ballistic tests and numerical simulations for containment capability characterisation of Waspaloy® alloy M. Di Sciuva, M. Degiovanni, M. Mattone, M. Gherlone, N. Bonora, A. Ruggiero & C. Frola..................................................................131 Experimental survey of the pressure cone and temperature field of an A/T missile system K. Krallis, Ν. G. Orfanoudakis, M. Founti, D. T. Hountalas, A. Fatsis & N. Vlachakis ...................................................................................141 Section 5: New developments in computational techniques Safety checks and hit probability computation in numerical trajectory calculation using error propagation technology A. Kuhrt & H. Rothe..........................................................................................153 Scalable parallel computation of explosively formed penetrators (EFPs) E. L. Baker, C. Chin, B. E. Fuchs & J. Pham ...................................................163 Data mining in military systems A. A. Motta, A. S. Alves & N. F. F. Ebecken .....................................................171

Computer simulated fragmentation arena test for assessing lethality and safety separation distances of explosive fragmentation ammunitions V. M. Gold, E. L. Baker & J. M. Pincay ...........................................................181 Section 6: Systems and technology Evaluations of computational techniques for the engraving of projectiles J. South, B. Powers & M. Minnicino.................................................................193 Long range electromagnetic cannon E. Schmidt & J. Tzeng.......................................................................................203 Analysis of weapon systems protecting military camps against mortar fire M. Graswald, I. Shaydurov & H. Rothe............................................................213 Empirical relationship for muzzle exit pressure in a 155 mm gun tube D. Carlucci & J. Vega.......................................................................................225 Author Index ...................................................................................................231

This page intentionally left blank

Section 1 Fluid flow aerodynamics

This page intentionally left blank

Unsteady computational fluid dynamics modeling of free-flight projectile aerodynamics
J. Sahu U.S. Army Research Laboratory, APG, MD, USA
Abstract
This paper describes a new multidisciplinary computational study undertaken to model the flight trajectories and the free-flight aerodynamics of both a finned projectile at supersonic velocities and a spinning projectile at subsonic speeds with and without aerodynamic flow-control. Actual flight trajectories are computed using an advanced coupled computational fluid dynamics (CFD)/rigid body dynamics (RBD) technique. An advanced time-accurate Navier–Stokes computational technique has been used in CFD to compute the unsteady aerodynamics associated with the free-flight of the finned projectile at supersonic speeds and the spinning projectile at subsonic speeds. Computed positions and orientations of the projectile have been compared with actual data measured from free-flight tests and are found to be generally in good agreement. Predicted aerodynamics forces and moments compare well with the forces and moments used in the six degree freedom fits of the results of the same tests. Unsteady numerical results obtained from the coupled method show the flow field, the aerodynamic forces and moments, and the flight trajectories of the projectile. Keywords: unsteady CFD, projectile aerodynamics, couple CFD/RBD method, flight trajectory.
1 Introduction
Understanding the aerodynamics of projectiles, rockets, and missiles is critical to the design of stable configurations and contributes significantly to the overall performance of weapon systems [1-3]. The prediction of aerodynamic coefficients for these weapon systems is essential in assessing the performance of new designs. Numerical simulations have the potential of greatly reducing design costs while providing a detailed understanding of the complex
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 3
doi:10.2495/CBAL070011

aerodynamics associated with each change. Recently, we have made progress in coupling computational fluid dynamics and flight dynamics to perform required multidisciplinary simulations for moving body problems. This involves real-time multidisciplinary-coupled computational fluid dynamics/rigid body aerodynamics computations for the entire flight trajectory of a complex guided projectile system. It can lead to accurate determination of aerodynamics that is critical to the low-cost development of new advanced guided projectiles, rockets, missiles, and smart munitions. Improved computer technology and state-of-the-art numerical procedures now enable solutions to complex, 3-D problems associated with projectile and missile aerodynamics. Modern guided munitions for future combat systems require the use of complex control surfaces (fins and canards), control mechanisms, and/or the use of flow technologies such as microjet gas generators to provide maneuver authority. The aerodynamic flow fields over these Army weapons are complex involving non-linear flow-physics especially during and after control maneuvers. For maneuvering munitions however, very limited data is available during and
understanding of the associated unsteady aerodynamics. Accurate numerical modeling of this unsteady aerodynamics has been found to be challenging both in terms of time-accurate solution techniques and computing resources required. Our goal is to be able to perform time-accurate multidisciplinary-coupled computational fluid dynamics (CFD) and rigid body dynamics (RBD) computations for complex guided projectiles with control maneuvers using microjets and/or control surfaces such as fins/canards. As part of a DOD High Performance Computing Grand Challenge Project, the present work is focused on the coupling of CFD and rigid body dynamics (RBD) techniques for simultaneous prediction of the unsteady free-flight aerodynamics and the flight trajectory of projectiles. In other words, can we perform physics-based fly-outs of the projectiles on the supercomputers and accurately predict the unsteady aerodynamics and flight behavior of projectiles in actual flights?
2 Technical approach
A real-time accurate approach is used in the present work; however, time-accurate computations require much greater computer resources. The real-time accurate approach also requires that the six-degrees-of-freedom (6 DOF) body dynamics be computed at each repetition of the fluid flow solver. In three-dimensional space, a rigid object has 6 DOF: three translations and three rotations. The 6 DOF code computes linear and angular velocities as well as the orientation of the missile, which are used as input to the computational fluid dynamics code. In turn, the aerodynamic forces and moments obtained from the flow solver are used to solve the 6 DOF body dynamics before moving on to the next time step. This procedure allows one to perform real-time multidisciplinary-coupled computational fluid dynamics/rigid body aerodynamics computations for the partial or entire flight trajectory of a complex guided projectile system.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
4 Computational Ballistics III
after control maneuvers [4,5], and there is a lack of knowledge and

The CFD capability used here solves the Navier-Stokes equations [6-9] and incorporates advanced boundary conditions and grid motion capabilities. The present numerical study is a big step forward and a direct extension of that research which now includes numerical simulation of the actual fight paths of the projectile using coupled CFD/RBD techniques using real-time accurate approach. The complete set of 3-D time-dependent Navier–Stokes equations is solved in a time-accurate manner for simulations of actual flights. The basic numerical framework in the code contains unified-grid, unified-physics, and unified-computing features. The user is referred to these references for details of the basic numerical framework. The 3-D time-dependent Reynolds-averaged Navier–Stokes (RANS) equations are solved using the finite volume method [7]:
[ ] ∫∫∫ =⋅−+VV
dVdAdVt
HGFW∂∂
(1)
where W is the vector of conservative variables, F and G are the inviscid and viscous flux vectors, respectively, H is the vector of source terms, V is the cell volume, and A is the surface area of the cell face. Second-order discretization was used for the flow variables and the turbulent viscosity equation. The turbulence closure is based on topology-parameter-free formulations. Two-equation [6] and higher order hybrid RANS/LES [10,11] turbulence models were used for the computation of turbulent flows. The hybrid RANS/LES approach is well suited to the simulation of unsteady flows and contains no additional empirical constants beyond those appearing in the original RANS and LES sub-grid models. With this method a regular RANS-type grid is used except in isolated flow regions where denser, LES-type mesh is used to resolve critical unsteady flow features. The hybrid model transitions smoothly between an LES calculation and a cubic k-ε model, depending on grid fineness. For computations of unsteady flow fields that are of interest here, dual time-stepping as described below was used to achieve the desired time-accuracy [12]. An unique feature of the present coupled approach is the full grid motion capability that allows the grid to move translate and rotate as the projectile flies down the rage, since the grid velocity is assigned to each mesh point. To account for rigid body dynamics, the grid point velocities are set as if the grid is attached to the rigid body with 6 DOF. As shown schematically in Figure 1, the 6 DOF comprise of the three spatial coordinates (x,y,z) and the three Euler angles, roll, pitch, and yaw (φ, Φ, Ψ). For the rigid body dynamics, the coupling refers to the interaction between the aerodynamic forces/moments and the dynamic response of the projectile/body to these forces and moments. The forces and moments are computed every CFD time step and transferred to a 6 DOF module which computes the body’s response to the forces and moments. The response is converted into translational and rotational accelerations that are integrated to obtain translational and rotational velocities and integrated once more to obtain linear position and angular orientation. From the dynamic response, the grid point locations and grid point velocities are set. Both CFD and RBD computations are performed at every time step in a fully coupled manner.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 5

φ
θψ
X
Z Y
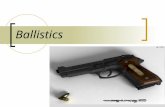
Figure 1: Rigid body dynamics schematic.
Figure 2: Finned configuration.
3 Results
Time-accurate unsteady numerical computations were performed using Navier–Stokes and coupled 6 DOF methods to predict the flow field and aerodynamic coefficients, and the flight paths of both a finned projectile at supersonic speeds and a spinning projectile at subsonic speeds. In all cases, full 3D computations were performed and no symmetry was used. The supersonic projectile modeled in this study is an ogive-cylinder-finned configuration (see Figure 2). The length of the projectile is 121 mm and the diameter is 13 mm. The ogive nose is 98.6 mm long and the afterbody has a 22.3 mm, 2.5° boat-tail. Four fins are located on the back end of the projectile. Each fin is 22.3 mm long and 10.16 mm thick. The computational mesh for the 25-mm projectile model is an unstructured one. In general, most of the grid points are clustered in the afterbody fin region. The total number of grid points is about 4 million for the full grid. Here, the primary interest is in the development and application of coupled CFD and RBD techniques for accurate simulation of the free-flight aerodynamics and flight dynamics of the projectile in supersonic flight. The first step here was to obtain the steady state results for this projectile at a given initial supersonic velocity. Also imposed were the angular orientations at this stage. Corresponding converged steady state solution was then used as the starting condition along with the other initial conditions for the computation of coupled CFD/RBD runs. Numerical computations have been made for these cases at an initial velocity of 1034 m/s. The simulations were started a small distance away
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
6 Computational Ballistics III

from the muzzle. The corresponding initial angle of attack was, α = 4.9o and initial spin rate was 2500 rad/s. Fig. 3 shows the computed pressure contours at a given time or at a given location in the trajectory. It clearly shows the orientation of the body at that instant in time and the resulting asymmetric flow field due to the body at angle of attack. The orientation of the projectile of course changes from one instant in time to another as the projectile flies down range. Figure 4 shows the variation of the Euler pitch angle with distance traveled. As seen in this figure, both the amplitude and frequency in the Euler angle variation are predicted very well by the computed results and match extremely well with the data from the flight tests. One can also clearly see the amplitude damped out as the projectile flies down range i.e. with the increasing x-distance. Although not shown here, similar behavior is observed with the Euler yaw angle and it damps out with the increasing x-distance. The computed results again compare very well with the measured data from the flight tests. The time histories of the pitch and yaw angles are often customarily presented as a motion plot where the pitch angle is plotted versus the yaw angle during the flight of the projectile. It represents the path traversed by the nose of the projectile during the flight trajectory (looking forward from the back of the projectile). Such a plot is shown in Figure 5. This figure shows the comparison of the motion plots obtained both from the numerical simulations and the 6 DOF analysis of the flight results from ARFDAS [13]. Computed results match very well with the experimental flight test results.
-8.00
-6.00
-4.00
-2.00
0.00
2.00
4.00
6.00
8.00
0.0 10.0 20.0 30.0 40.0 50.0 60.0 70.0 80.0
Range, m
Thet
a, d
eg
Experimental DataCFD (2M grid)CFD (4M grid)CFD (6M grid)
Figure 3: Computed pressure contours.
Figure 4: Euler pitch angle vs. range.
As stated earlier, coupled CFD/RBD simulations have been performed for a spinning projectile at subsonic speeds as well. The subsonic projectile is a 1.8-caliber ogive-cylinder configuration (see Figure 6). A computational grid expanded near the vicinity of the projectile is shown in Figure 7. Grid points are clustered near the jet as well as the boundary layer regions to capture the high gradients flow regions. The computational grid has 211 points in the streamwise direction, 241 in the circumferential direction, and 80 in the normal direction. The unsteady simulations took thousands of hours of CPU time on the Xeon PC cluster system at ARL MSRC running with either 32 to 64 processors.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 7

(a)
-8
-6
-4
-2
0
2
4
6
8
-12 -10 -8 -6 -4 -2 0 2 4 6 8 10 12
Psi
( ) y
(b)
Figure 5: Motion plot (a) computation, (b) flight test.
Microjet
Lift
Figure 6: Spinning projectile geometry.
The first step here was to obtain the steady state results for the same projectile without the jet with the grid velocities prescribed. Also imposed were the angular orientations at this stage. Corresponding converged jet-off steady state solution was then used as the starting condition along with the other initial conditions for the computation of coupled CFD/RBD runs. Synthetic jets were activated at a specified point in the trajectory. The jet locations on the projectile are shown in Figure 6. The jet conditions were specified at the exit of the jet (sinusoidal variation in jet velocity). The jet conditions specified include the jet pressure, density and velocity components. The flow field inside of the tiny jet cavity is not computed. For the unsteady jets, time-dependent jet boundary conditions are applied at the jet exit. Numerical computations have been made for these jet cases at an initial Mach number, M = 0.39, initial angle of attack, α
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
8 Computational Ballistics III

= 2o, and an initial spin rate of 434 Hz. The jet width was 0.32 mm, the jet slot half-angle was 18o, and the peak jet velocity used was 110 m/s operating at a frequency of 1000 Hz. The jet-off coupled calculations are started from the same initial conditions.
Z
YJet-on
Figure 7: Computational grid.
Figure 8: Schematic showing the jet actuation in a spin cycle).
-2000.00
2000.00
6000.00
10000.00
14000.00
18000.00
22000.00
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Range, m
Phi,
deg
ARFDAS Fit
Experimental DataCFD
Figure 9: Comparison of computed roll angle, jet-off.
Unsteady time-accurate CFD computations require huge computer resources. All the results presented here were obtained from unsteady numerical computations with a single synthetic jet on a 40–mm subsonic grenade (Figure 6). Looking from the back of the projectile (see Figure 8), the projectile spins clockwise. The jet actuation corresponds to one-fourth of the spin cycle from -45° to +45° with zero degree being the positive y-axis. The jet is off during the remaining three-fourths of the spin cycle. The unsteady CFD modeling technique required about 180 time steps to resolve a full spin cycle. The unsteady synthetic jet operates at a high frequency of 1000 Hz. For the part of the spin cycle when the jet is on, the jet operated for approximately four cycles. Trajectories were computed for both jet-off and jet-on conditions. For the jet-on case12, an unsteady synthetic jet was applied while the projectile is spinning and the jet was activated at approximately 41 meters into the trajectory. Figure 9
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 9

shows the computed roll angles as a function of the x-distance or the range. The roll angles shown here are the accumulated values to include 360 degrees for every spin cycle of the projectile. Computed roll angle are compared with the experimentally observed values as well as data obtained the 6 DOF analysis of the flight results from ARFDAS [13]. and are found to be in good agreement.
-8.00
-7.00
-6.00
-5.00
-4.00
-3.00
-2.00
-1.00
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Range, m
Thet
a-FP
, deg
ARFDAS FitExperimental DataCFDCFD(SM-DT)
Figure 10: Computed Euler pitch angle, jet-off for different time steps.
Figure 10 shows the variation of the Euler pitch angle with distance traveled. As seen in this figure, both the amplitude and frequency in the Euler pitch angle variation are predicted very well by the computed results and match well with the data from the flight tests for up to a distance of 20 meters. For the rest of the trajectory, the frequency of the motion is predicted very well as seen by the comparison with the data, but the amplitude doesn’t compare as well with the data. Two sets of CFD results are shown in this figure, one obtained with the original time step and another one with a smaller time step reduced by half. As seen in this figure, reducing time-step by half has negligible effect on the accuracy of the computed results. Further analysis and investigation are required and are underway. Figure 11 shows similar behavior with Euler yaw angle with x-distance. The agreement between the computed results and the experimental data again is generally good except for the amplitude comparison at greater ranges. In both figures 10 and 11, we have both slow and fast mode frequencies and both compare well with the data and the ARFDAS fits. Figure 12 shows the variation of the Euler pitch angle with distance traveled both for jet-off and jet-on conditions. As seen in this figure, the effect of the jet is small and incremental. The computed Euler angles are again compared with the experimental range test data shown in dark circles for the jet-off case. As seen here, the computed data predicts the frequency rather well; however, the amplitudes in some parts are under-predicted in the computations.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
10 Computational Ballistics III

-8.00
-7.00
-6.00
-5.00
-4.00
-3.00
-2.00
-1.00
0.00
1.00
2.00
3.00
4.00
5.00
6.00
7.00
8.00
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Range, m
Psi-F
P, d
egARFDAS FitExperimental DataCFD (SM_DT)CFD
Figure 11: Comparison of the computed Euler yaw angle, jet-off for different
time steps.
-10.00
-8.00
-6.00
-4.00
-2.00
0.00
2.00
4.00
6.00
8.00
10.00
0.0 10.0 20.0 30.0 40.0 50.0 60.0
Range (m)
Thet
a (d
egre
e)
Experimental DataCFD - JetoffCFD - Jeton
Figure 12: Comparison of computed Euler pitch angle, jet-off and jet-on.
4 Concluding remarks
This paper describes a new coupled CFD/RBD computational study undertaken to determine the flight aerodynamics of both a finned projectile and a spinning projectile. A three-dimensional unsteady Navier–Stokes solver is employed to compute the time-accurate aerodynamics associated with the free-flight of the finned projectile at supersonic velocities and the spinning projectile at subsonic speeds. Computed positions and orientations of the projectile have been compared with actual data measured from free-flight tests and are found to be generally in good agreement. Predicted aerodynamics forces and moments also compare well with the forces and moments used in the six degree freedom fits of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 11

the results of the same tests. This work demonstrates a coupled method to accurately predict the time-accurate unsteady aerodynamics and the flight trajectories of projectiles at various speeds. The present CFD/RBD simulations clearly show the capability of the coupled approach and form the basis for future multidisciplinary, time-dependent computations of advanced maneuvering munitions.
References
[1] Sahu, J., K. R. Heavey, and E. N. Ferry, “Computational Fluid Dynamics for Multiple Projectile Configurations.” Proceedings of the 3rd Overset Composite Grid and Solution Technology Symposium, Los Alamos, NM, October 1996.
[2] Sahu, J., K. R. Heavey, and C. J. Nietubicz, “Time-Dependent Navier–Stokes Computations for Submunitions in Relative Motion.” 6th International Symposium on Computational Fluid Dynamics, Lake Tahoe, NV, September 1995.
[3] Meakin, R. L., “Computations of the Unsteady Flow about a Generic Wing/Pylon/Finned-Store Configuration.” AIAA 92-4568-CP, August 1992.
[4] Smith B. L., and A. Glezer, “The Formation and Evolution of Synthetic Jets.” Journal of Physics of Fluids, vol. 10, No. 9, September 1998.
[5] Davis, S. A. and Glezer, A., “The Manipulation of Large- and Small-Scales in Coaxial Jets using Synthetic Jet Actuators”, AIAA Paper No. 2000-0403, January 2000.
[6] Avancha, R. and Pletcher, R. H., “Large Eddy Simulation of the Turbulent Flow Past a Backward Facing Step”, AIAA paper No. 2000-0542, January 2000.
[7] Arunajatesan, S. and Sinha, N., “Towards Hybrid LES-RANS Computations of Cavity Flowfields”, AIAA Paper No. 2000-0401, January 2000.
[8] Batten, P., U. Goldberg and S. Chakravarthy, "Sub-grid Turbulence Modeling for Unsteady Flow with Acoustic Resonance", AIAA Paper 00-0473, 38th AIAA Aerospace Sciences Meeting, Reno, NV, January 2000.
[9] Peroomian, O., S. Chakravarthy, and U. Goldberg, “A ‘Grid-Transparent’ Methodology for CFD.” AIAA Paper 97-07245, 1997.
[10] Peroomian, O., S. Chakravarthy, S. Palaniswamy, and U. Goldberg, “Convergence Acceleration for Unified-Grid Formulation Using Preconditioned Implicit Relaxation.” AIAA Paper 98-0116, 1998.
[11] Goldberg, U. C., O. Peroomian, and S. Chakravarthy, “A Wall-Distance-Free K-E Model with Enhanced Near-Wall Treatment.” ASME Journal of Fluids Engineering, Vol. 120, pp. 457-462, 1998.
[12] Sahu, J., “Unsteady CFD Modeling of Aerodynamic Flow Control over a Spinning Body with Synthetic Jet.” AIAA Paper 2004-0747, Reno, NV, 5-8 January 2004.
[13] Arrow Tech Associates. “ARFDAS Technical Manual.” South Burlington, VT, 2001.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
12 Computational Ballistics III

3D transient numerical simulation for sabot separation
D. Touati & S. Peles Israel Military Industries, Central Laboratory Division, P.O.B. 1044, Ramat Hasharon, 47100, Israel
Abstract
This paper presents a sabot discard model to predict sabots separation. The model uses the FSI (Fluid Structure Interaction) numerical packages of MSC-DYTRAN to determine the evolution of sabot separation motion. The 3D model enables us to calculate the asymmetric sabots discard trajectory using Euler Lagrange coupling. We neglect the blast region effect on the sabot discards process near the muzzle. Physical quantities such as linear and angular displacement, velocities, acceleration and exerted forces on the sabot structures are computed. Simulated results and experimental data show close agreement. Keywords: sabots petals, discard, kinetic energy penetrator.
1 Introduction
The kinetic energy penetrator is a widely used anti tank munitions. Its lethality is due to the kinetic energy imparted by the penetrator to the target with impact velocities of between 1.4 to 1.8 km/s. The penetrator is launched by means of a sabot assembly, consisting of three aluminum sabot petals, required to minimize the penetrator’s in bore balloting. The process of sabot separation begins as the projectile leaves the gun tube. Because of the transverse motion of the projectile within the gun, energy is stored in the elastic sabot petals. As the projectile leaves the muzzle, the constraints of the gun tube are released and the sabot elements are able to move laterally outward. Aerodynamic forces acting on each of the sabot petals causes them to lift up and disengage from the buttress grooves of the penetrator rod to permit its unconstrained, low drag flight to the target. It has been demonstrated by Schmidt and Shear [1] that aerodynamic interference generated by the sabot components can be a significant source of projectile
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 13
doi:10.2495/CBAL070021

launch disturbance leading to unacceptable loss of accuracy at the target. Perturbations to the projectile trajectory are magnified by geometric asymmetry in the discard pattern and by the extended periods during launch when the sabot components are in close proximity to the projectile. Erengil [2] used analytical expressions to estimate transient sabot surface pressure distributions, which are then integrated numerically to yield force and moments to determine sabot discard trajectories. Cayzac et al [3] investigated the launch dynamics of a 44 mm APFSDS. The 2D Euler equations have been used to predict sabot separation in an intermediate ballistic flow field. Nusca [4] simulated a quasi steady sabot discard process that was also tested in a wind tunnel. First he computes the aerodynamic forces and moments exerted on the sabot petals at specific positions, and then this loading was used to compute the dynamic motion of the sabots. The quasi steady simulation ignores the flow time dynamics and does not link the aerodynamic forces to sabot motion. An insight into the transient sabots separation processes was provided in this paper via a detailed finite element model, representing the sabot and penetrator subjected to a free stream flow field. The model was prepared using exact geometric part features, which include the buttress grooves details on both the sabot and penetrator. We used the FSI numerical feature of MSC – DYTRAN, and utilize an Euler Lagrange coupling to correlate unsteady aerodynamic forces and the sabot body motion.
`
(a) ` (b)
Figure 1: Slice of the finite elements model of the sabot and projectile rod subjected to free stream flow field.
2 Numerical model
The configured numerical model included a stationary fins stabilized penetrator at a zero angle of attack with respect to the free stream flow field, and three 1200 sector sabots petals encompassing the penetrator. The sabot discard simulations are performed for a radial separation of the sabot from the projectile surface. Based on the above assumption, the model utilizes only one half of the computational domain as shown in figure 1a. The flow field characteristics were
Computational domain
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
14 Computational Ballistics III

calculated using the Euler equation and the angle of attack was used as the only source of asymmetry in the free flow stream initial condition. A slice of the finite elements model of sabot and penetrator, respectively, subjected to the free stream flow field is shown in Figure 1b. The numerical model neglected the blast region effect on the sabot discards process near the muzzle based upon experimental results which revealed a short range spatial influence of the blast region on the sabot discard process. The discard process comes to an end at a distance of 15 m from the muzzle exit while the blast region influence is limited to the close proximity of the muzzle at a distance of 1 m. The sabots and the kinetic projectile rod were modeled using 3 – Dimensional 8 – node Hexagonal elements. The sabot and the penetrator were assumed to be rigid. The interface at the buttress grooves between the sabot and the penetrator is modeled using contact features of the software to allow for realistic load transfer from the sabot to the penetrator. The interface between the penetrator and sabot buttress groove is shown in enlarged view in figure 2.
Figure 2: Enlarged view of the sabot and projectile kinetic rod buttress groove interface.
The air surrounding the sabot and main rod structures is modeled using a Eulerian mesh with cylindrical outer shape border. Air inflow and outflow boundary conditions were applied and the air velocity at the boundary was the projectile muzzle velocity which was kept constant throughout the sabot discard simulation. An ideal gas equation of state was used to simulate the air behavior. The dynamic air pressure interacted with the sabots structure by means of a fluid – structure interacting algorithms.
3 Simulation results
Figure 3 shows the pressure contours of the air within close proximity of one of the sabot petals.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 15

(a) (b)
(c)
Figure 3: (a) Shadowgraph photo of sabot discard experiment 3.5 ms after the projectile exits from bore muzzle. (b) Simulation results of air density plot in close proximity to the sabot region at 3.5 ms. (c) Contour map of density plots (simulation results).
Figure 4: Contours of air pressure surrounding the sabot structure.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
16 Computational Ballistics III

The figure presents the sabot’s simulated and experimental attitudes with respect to the projectile rod at 6 m beyond the muzzle exit. There is a close resemblance between the simulated and experimental shock wave patterns. Figure 4 presents air pressure contours surrounding the sabot structure at different time frames during the discard process. Figure 5 depicts the linear velocities components of the sabot’s c.g during the discard process at (00 angle of attack).
Figure 5: Sabot C.G velocities components Vx (blue) and Vy (red).
Figure 6: Rotation angle vs. time of upper sabot at three different yaw angles.
Figure 6 shows the sabot’s angular displacement during the sabot discard process for different Yaw angles of the free flow. The measured rotation angle around the sabot’s c.g. point decreases as the Yaw angle increase. The angular
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 17

differences are due to Yaw angle effects which increase or decrease the petal area which is exposed to the flow field, causing the aerodynamic lift and drag force to discard the sabot at a slower or faster rate correspondingly. As may be seen, the interaction time between the sabot and the kinetic projectile rod does not exceed 2 ms for the specific sabot geometry and the given yaw angles. Figure 7 shows the aerodynamics force components exerted on the sabot during the discard process. The sabot separation process involves a continuous growth of the sabot surface area exposed to the free stream flow which results in an increase in the corresponding aerodynamic force magnitude in the x direction from 1 KN up to almost 10 KN while the resultant aerodynamic force magnitude in the y direction decreases.
Figure 7: Aerodynamic forces exerted on sabot structure.
4 Summary
An insight into the transient sabots separation processes was provided in this paper via a detailed finite element model, representing the sabot and penetrator, subjected to a free stream flow field. The model was prepared using exact geometric part features, which include the buttress groove details on both the sabot and penetrator. It was written in the FSI numerical package of MSC - DYTRAN and utilizes an Euler Lagrange coupling to correlate the unsteady aerodynamic forces and the sabots’ rigid body motions. In retrospect we determined that the fluid Euler equation are sufficient for describing the sabot’s entire spatial motion and the general characteristics of the flow field over the sabot. The magnitude of the exerted aerodynamic interfacial forces were assessed, and it was further revealed that the interaction time between the sabot and the projectile rod does not exceed
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
18 Computational Ballistics III

2 ms for the specific sabot geometry. The most significant attribute of this model is that it does not rely on any empirical data and is therefore widely applicable. The simulation results are in close agreement with the experiments.
References
[1] Schmidt E.M., Shear D.D., Aerodynamic Interface During Sabot Discard, Journal of Spacecraft and Rockets, AIAA, Vol 15, No 3, May-June, 1978, pp. 235-240.
[2] Erengil M. E., Sabot Discard Model For Conventional and Electromagnetic Launch Package, 19th International Symposium of Ballistics 7-11 May 2001, pp 213-221 Interlaken, Switzerland.
[3] Cayzac R., Carette E., Alziary de Roquefort T. Intermediate Ballistics Unsteady Sabot Separation: First Computations and Validation, 19th International Symposium of Ballistics 7-11 May 2001, pp 297-305 Interlaken, Switzerland.
[4] Nusca M. J., Numerical Simulation of Sabot Discard Aerodynamics, Army Research Laboratory ARL-TR-204 September 1993.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 19

This page intentionally left blank

Fast calculation of direct fire trajectories taking the earth’s rotation into account
W. Roetzel1, W. Czarnetzki2 & T. Maier2 1Helmut-Schmidt-Universität / Universität der Bundeswehr Hamburg, Germany 2Hochschule Esslingen, Germany
Abstract
An analytical approach is developed for the subsequent consideration of the Coriolis effect. The target is regarded as a moving target in the star-fixed coordinate system. The stationary atmosphere creates a nonuniform cross-wind which reduces the normal moving target deflection of the projectile. The approach is implemented in a previously developed analytical fast calculation method and tested against numerical calculations with good results. Keyword: Coriolis effect, analytical solution, power law, drag coefficient, Mach number.
1 Introduction
Several analytical solutions of the point mass equation of motion have been developed for the fast calculation of direct fire trajectories [1–4], which are based on the power law
( )2/
*
* mmmm
D TT
vaC
vaCMaCc
⋅
⋅=
⋅=⋅= − (1)
for the drag coefficient variation with Mach number. McCoy [1] published flat fire solutions for m= 0, ½, 1. The later solutions [2–4] allow for arbitrary values of m and any angle of sight β [3, 4]. Wind can be considered using a coordinate transformation [2, 4]. For uphill and downhill firing the change of pressure and temperature along the trajectory should be considered. Usually mean values of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 21
doi:10.2495/CBAL070031

pressure and temperature are applied [3]. A more sophisticated way [4] is the correction of the Mach number exponent, which takes not only the changing pressure and temperature but also the curvature of the trajectory approximately into consideration. The above mentioned fast calculation methods do not allow for the earth’s rotation. In the present paper a simple analytical method is described [5] with which the Coriolis effect can subsequently be considered. The same coordinate system and nomenclature is used as in the foregoing paper [4].
2 Numerical method
For the precise calculation of the trajectory the complete equation of motion has to be integrated numerically. With the previously [2,4] defined ballistic coefficient
( )2/1*
***
8²
8²),(
mmm
TT
ppa
MdCa
MdCTpD
−
⋅⋅⋅=⋅= ρπρπ (2)
the equation of motion with wind velocity w can be written as [1]
( ) ( ) bwvwvDg m −−⋅−⋅−= −1v (3) with the Coriolis acceleration
v×−= ω2b (4) containing the earth’s vector ω of rotation
−=
γψψ
γψωω
sincossin
coscos . (5)
In eqn (5) the angle ψ is the latitude and the angle γ the azimuth of fire (x-axis), measured clockwise from north. Assuming the standard temperature drop with altitude ∆T/∆y = -0.0065 k/m [6] and regarding the atmosphere as perfect dry air yields the ballistic coefficient D as function of height y
2/25593.4
00
0065.01m
yT
DD+
⋅−⋅= , (6)
where index “0” indicates the firing site and origin of the earth-fixes coordinate system.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
22 Computational Ballistics III

Starting at the origin with 0=τ and 0,, == zyxL , the local projectile velocity v can stepwise be calculated as function of time. Integrating simultaneously over the time yields L as function of time. This numerical calculation is later carried out in order to test the new approach which is derived and described in the following.
3 Analytical approach
The equation of motion without the Coriolis acceleration is valid in a star-fixed not rotating system which moves with uniform velocity. Therefore the coordinate system in which the Coriolis-free solutions [1–4] are valid is considered to move on uniformly with the fixed circumferential (not rotating) velocity 0u of the firing site (origin of coordinate system) at the instant of firing 0=τ . For 0=τ this star-fixed coordinate system coincides with the earth-fixed system, for 0>τ they separate from each other.
3.1 The moving centre of gravity
In this star-fixed system a flying projectile experiences an additional gravitational acceleration g∆ in the horizontal direction, as the centre of gravity does not remain exactly perpendicular below the projectile. With the simplifying assumption of constant mean velocity components vx and vz and the radius R = 6.37·106m of the globe, the additional time dependent acceleration can be expressed as
+⋅
+⋅−⋅
−=
+
+⋅
−=∆τω
τωττ
/0
/0
1
1
zR
xR
Rg
vu
vu
Rgg
x
z
zz
xx . (7)
Substituting ωx and ωz according to eqn (5) and integrating twice over the time of flight yields the displacement of the projectile
+
+⋅−=∆
11
11311
/coscos0
/sincos
6τγψω
τγψωτ
Rz
RxgL g
. (8)
The vertical components ∆gy = 0 and ∆L1gy = 0 since 1cos 1 ≈ωτ . The derivation of eqn (8) is correct under vacuum conditions. The effect of eqn (8) is very week in normal cases and a sufficiently accurate approach.
3.2 The moving target
The main effect of the earth’s rotation is the fact that in the uniformly moving star-fixed system the earth-fixed target appears as a moving target. We look first at the poles of the globe. There the circumferential velocity is zero, but the earth-
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 23

fixed coordinate system rotates relatively to the considered star-fixed system. At the north pole any target will travel from west to east, i.e. from right to left. A negative angle of lead 0<α would be required to hit the moving target. The shift
ω1L∆ of the target during the time of flight 1τ can be expressed as
( )[ ] ( )
∆×+×=∆+×=∆≈0
1111111 gg LLLLL ωωτωτω (9)
which leads with eqn (5) to
−−−
+⋅=∆
ψγψγψγψ
γψψτωω
sincoscoscoscossincos
sincossin
11
11
11
11
xyzx
yzL
. (10)
At other latitudes °±≠ 90ψ an additional target movement takes place in the star-fixed system which is caused by the growing distance between the origins of both coordinate systems. However, a detailed analysis shows that this additional shift can be omitted. Its effect is compensated by the fact that in the usual standard free-fall acceleration g = 9.80665 m/s2 (at sea level) the centrifugal acceleration due to the earth’s rotation is included (subtracted from the mass attraction force). Thus, eqn (10) is valid for all values °+<<°− 9090 ψ . The same shift (10) with negative sign is found by the twofold integration of the Coriolis acceleration eqns (4,5) using a constant mean projectile velocity
11 /τLv = . The negative sign shows that in the earth-fixed system the projectile is apparently accelerated and displaced in the opposite direction as the target is in the star-fixed system. One could suppose that the final Coriolis deflection of the projectile in the earth-fixed system could be expressed as
ω111 LLL g ∆−∆=∆ . (11) However, this is only a rough approximation under normal shooting conditions which will be discussed later in this paper. Eq (11) holds true in a vacuum. The contribution
gL1∆ is normally relatively small. In the special case of the
downward free-fall in a vacuum at the equator ( )0,,0,0 11 LL −==ψ gL1∆ is
decisive. For 0=γ and with the time of flight ( ) 2/111 /2 gL=τ eqn (11) yields the
correct [7, p.214] east drift
3221
312
2/11
1
2/11
11 ⋅
⋅⋅=
+−⋅
⋅⋅=∆
gLL
gLLL z ωω . (12)
The term –1/3 is due to
gL1∆ . Neglecting it would cause an overestimation of 50%.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
24 Computational Ballistics III

3.3 The Coriolis wind
The moving target problem under consideration differs from the usual case in so far as the air follows the moving target. If no wind is present, the stationary air in the earth-fixed system rotates in the star-fixed system together with the target. The moving target gets tailwind of equal velocity. The wind is not uniformly distributed but the cross-wind velocity cw is zero at the firing site and grows linearly with the distance to its maximum value 1w at the target
1
1
11
1c w
τL
xx
xxw ∆−
⋅=⋅= . (13)
This Coriolis wind pushes the projectile towards the moving target and reduces the deflection according to eqn (11). Since the consideration of uniform wind is no problem, a suitable mean uniform Coriolis wind velocity cmw is defined and derived which produces the same effect as the actual linearly growing Coriolis wind does:
1
11
1
11cm ww
ττω gLL
fLff∆−∆
⋅==∆⋅−=⋅= . (14)
A horizontal flat shot in the x-direction (vx = v) towards a target at distance x1 with cross-wind of velocity wz = wc is considered. Gravity is neglected. For wZ << v
−⋅−= zv
xxw
vv
11zv . (15)
From eqns (1–3) one can derive [2]
[ ]
⋅−+−= −− mm
mm
vmDDmx
vxx
110
1
0
1
)1(11 τ (16)
and
τ⋅−+−
= −
−
m
m
vmDDv
vv
10
10
)1(1. (17)
Substituting eqns (16) and (17) into eqn (15) yields a first order linear inhomogeneous differential equation for )(τzv . Solving first the homogeneous differential equation and applying the variation of the constant yields with the boundary condition 0=τ : vz = 0 the projectile velocity component vz as function of time. Integrating vZ from 0=τ to 1τ gives the deflection z1 of the projectile at the distance x1. The same deflection z1 has to be produced by the
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 25

uniform wind of velocity wcm, defined with eqn (14). This deflection can be found by replacing in eqn (15) the variable velocity w1 ·x/x1 by the constant velocity f·w1. The solution leads to the known formula of Didion [1]
( )1100
11z xv
vwf
−⋅⋅
= τ . (18)
Equating both deflections z1 and solving for f yields finally the implicit formulas for the determination of the correction factor f:
[ ]
⋅−−−+−
+⋅−
+⋅
−=
−−
2
121
)21)(1()1(11
1),(
ηη
η mmmmVV
mm
mV
VVmVf
mm , (19)
[ ] 1)1(11 −−+−
⋅=
mm
m
mVη
η . (20)
For given values of m and guessed values of η the dimensionless number V and the factor f can be calculated. Iteratively one can determine f as function of m and V. The number V is defined as
1V0,1
1
1
10 ≥=⋅
==p
x
xv
τττ . (21)
It is the ratio of the horizontal components of the muzzle velocity and the mean velocity. It can be determined once the trajectory has been calculated numerically or analytically (neglecting the Coriolis effect). In a vacuum V → 1. The right-hand definition as the ratio of the times of flight under normal and vacuum conditions is more appropriate when both vx0 and x1 turn to zero. (e.g. free-fall in a vacuum). In the special case m = ½ the variable η in eqns (19, 20) can be eliminated yielding the explicit formula
−⋅
−+
⋅
−== 1
ln211
2
2/1 VV
VV
VVfm
. (22)
In the special cases m = 0 and m = 1 the eqns (19, 20) cannot be applied directly and the following implicit equations have to be used
( ))1ln(
,12110 λ
λλ +
=
−−⋅
−== VV
VVfm
, (23)
( )
µ
µµ −= −
=
−
−⋅
−=
eVV
VVfm 1
,11211
. (24)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
26 Computational Ballistics III

For m ≠ ½ the determination of f is inconvenient and time consuming. Therefore the following empirical explicit formula has been developed:
EVf211
+= , 208.0)1(48.0 mmE ++= . (25)
For the limiting value V → 1 the exponent E = (l +m)/2 is more precise. Equation (25) is sufficiently accurate for all direct fire applications. Once the correction factor f is found, the Coriolis deflection of a projectile can subsequently be calculated as follows: First 1L∆ is calculated from eqs (8, 10, 11). This vector represents the deflection of the projectile from the target 1L neglecting the Coriolis wind. The mean Coriolis wind velocity cmw is calculated using eqn (14) with f from eqn (25). If a real uniform wind is present, the Coriolis wind velocity has simply to be added to the real wind velocity. The sum of both winds can be taken into account by a coordinate transformation [2, 4] or other known methods. If no real wind is present the application of Didion´s formula is recommended. Combining the shift 1L∆ and the Coriolis wind effect according to Didion leads to the following formula for the Coriolis drift of the projectile
E
E
c VVLL++
⋅∆=∆−
22 1
11. (26)
A horizontal flat shot has been assumed in the above derivations. For uphill and downhill fire the exponent m in eqs. (19–26) has to be corrected for changing air pressure and temperature along the trajectory [4]. The exponent m has to be replaced by m* = m – n with n according to [4, eq. (26)]:
++
−=
0200
0 )2/25593.4)(0065.0()1(sinT
mv
mgD
vn
m β . (27)
4 Test of the analytical approach against numerical calculations
The analytical Coriolis approach has been implemented into a fast calculation programme, based on the previously developed explicit Coriolis-free analytical solution [4, chapter 3.2 and 4]. The programme is constructed in such a way that for a given target (x1, y1) or (L1, β) and wind velocity (wx, wy, wz) the angle of lead and the gun elevation angle above line of sight is calculated iteratively. The extended programme has been tested against numerical calculations described in chapter 2 of this paper. Four typical examples are presented in the following.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 27

4.1 Example 1
The 185 Grain match projectile Lapua Scenar .30 GB 423, d = 7.8232 mm, M = 11.988 g is considered with m = 0.4855 and C = 0.4286 (eq. (1)). The projectile is fired with v0 = 930 m/s at sea level, p0 = 1013.25 mbar and t0 = 15° C. The angular velocity of the earth is taken as ω = 7.292 . 10-5 rad/s [1]. The muzzle Mach number Ma0 = 2.73. It reduces to Ma1 = 1.25 (in all examples) after the fixed time of flight τ1 = 1.6 s. Table 1 shows calculated Coriolis deflections for flat fire from the north pole and the equator. The same results are obtained (with millimeter accuracy) from the analytical and the numerical method. The analytical deflections are calculated using eq. (26) yielding the same values as the fast calculation programme.
4.2 Example 2
The same projectile and data are used as in example 1 with the exception of the gun elevation angle φ0 = 46° and the latitude ψ = 45°. Table 2 shows the results. The values in brackets are analytically calculated deflections which deviate from the corresponding numerical values. The largest deviation is 1 mm in height at the distance (bee-line) of about 1 km.
4.3 Example 3
A projectile of identical shape (equal values of m and C) and mass density is considered, which has the threefold diameter d = 23.47 mm. The mass is enlarged by the factor 27, yielding M = 323.68 g. From the analytical solution [4] one can see that with the same muzzle velocity and threefold time of flight τ 1 = 4,8 s the end velocity will remain the same at the threefold distance. So Ma = 2.73 to 1.25. One can also predict that for flat fire the elevation angle above line of sight will increase by the factor 3. Table 3 shows the flat fire results for φ0 = 2°, τ 1 = 4.8 s and L1 = 3019.26 m. The largest deviations are 3 mm. Concerning the superelevation angles: For example 1 the Coriolis-free superelevation angle ε1 = 9.7866 mils and for example 3 ε3 = 29.3598 mils = 3 . ε1.
Table 1: Flat fire vertical (∆ y) and horizontal (∆ z) Coriolis deflections, calculated numerically and analytically. Projectile Lapua Scenar .30 GB 432, 185 Grain. Gun elevation angle φ0 = 1°. Coriolis-free range x1 = 1006.2 m, hitpoint height y1 = 7.71 m, distance L1 = 1006.2 m. Muzzle velocity v0 = 930 m/s, time of flight τ 1 = 1.6 s.
ψ(°) 90 0 0 0 0 γ (°) 0÷360 0 90 180 270
∆y (mm) 0 0 +102 0 -102 ∆z (mm) +102 -1 0 +1 0
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
28 Computational Ballistics III

Table 2: Uphill fire Coriolis deflections, calculated numerically and analytically (deviating analytical results in brackets). Projectile Lapua of Table 1, φ0 = 46°, x1 = 705.45 m, y1 = 720.58 m, L1 = 1008,41 m, v0 = 930 m/s, τ 1 = 1.6 s.
ψ(°) 90 45 45 45 45 γ (°) 0÷360 0 90 180 270
∆y (mm) 0 0 +51 0 -52 (-51) ∆z (mm) +72 -1 +51 +103 +51
Table 3: Flat fire Coriolis deflections, calculated numerically and analytically (deviating analytical results in brackets). Projectile of Lapua geometry and mass density but threefold diameter (d = 23.47 mm, M = 323.68 g), φ0 = 2°, x1 = 3019.22 m, y1 = 16.75 m, L1 = 3019.26 m, v0 = 930 m/s, τ 1 = 4.8 s.
ψ(°) 90 0 0 0 0 γ (°) 0÷360 0 90 180 270
∆y (mm) 0 0 +920 0 -920 ∆z (mm) +920 -14(-17) 0 +14(+17) 0
Table 4: Uphill fire Coriolis deflections, calculated numerically and analytically (deviating analytical results in brackets). Projectile of Table 3, φ0 = 47°, x1 = 2116.19 m, y1 = 2178.37 m, L1 = 3037.03 m, v0 = 930 m/s, τ 1 = 4.8 s.
ψ(°) 90 45 45 45 45 γ (°) 0÷360 0 90 180 270
∆y (mm) 0 0 +469(+463) 0 -469(-463) ∆z (mm) +655 -20(-22) +463 +947(+948) +463
4.4 Example 4
The same data are used as in example 3, however the elevation angle changes to φ0 = 47° and the latitude to ψ = 45°. The Coriolis-free distance is now L1 = 3037.03 m, which is slightly longer than in example 3, although gravity pulls the projectile back. The reason is the decreasing air pressure along the trajectory. Table 4 again shows very good agreement. The largest error occurs in height with 6 mm at a distance of about 3 km. As mentioned with eq. (26), in the analytical approach the corrected exponent m has to be used. In this particular case m = 0.4855, n = 0.3574 (eq. (27)) and the corrected exponent m* = 0.1281.
5 Conclusions
The developed analytical approach yields sufficiently accurate vertical and horizontal Coriolis deflections and represents a simple and useful extension of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 29

the previously developed [4] analytical fast calculation method for direct fire applications.
References
[1] McCoy, R.L., Modern Exterior Ballistics / The Launch and Flight Dynamics of Symmetric Projectiles, Schiffer Publishing Ltd: Atglen, PA 19310, 1999.
[2] Roetzel, W., Analytische Berechnung gestreckter Geschossflugbahnen. Mitteilungen der Schießsport-Arbeitsgemeinschaft an der Universität der Bundeswehr Hamburg Nr. 1, Ed. H. Rothe, Helmut-Schmidt-Universität, Universität der Bundeswehr Hamburg, 2004.
[3] Kuhrt, A., Rothe H., The use of computer algebra and nonlinear optimization for realtime computation of fire orders for direct fire, Computational Ballistics II, pp. 337 -346, Eds. V. Sanchez-Galvez, C.A. Brebbia, A.A. Motta, C.E. Anderson, WIT Press 2005.
[4] Roetzel, W., Analytical calculation of trajectories using a power law for the drag coefficient variation with Mach number. Computational Ballistics II, pp. 303 – 312, Eds. V. Sanches-Golvez, C.A. Brebbia, A.A. Motta, C.E. Anderson, WIT Press 2005.
[5] Roetzel, W., Verfahren zur nachträglichen Berücksichtigung von Coriolis-Effekten bei der Bestimmung der Flugbahnen von Geschossen, unpublished report, Hamburg, 2005.
[6] Rogers, G.F.C., Mayhew, Y.R., Thermodynamic and Transport Properties of Fluids, Basil Blackwell Ltd. Oxford, 4th Edition, 1988.
[7] Szabó, I., Einführung in die Technische Mechanik, 3. Auflage, Springer-Verlag, Berlin / Göttingen / Heidelberg, 1958.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
30 Computational Ballistics III

Generating an aerodynamic model for projectile flight simulation using unsteady time accurate computational fluid dynamic results
J. Kokes1, M. Costello2 & J. Sahu3 1Orbital Sciences Corporation, USA 2Georgia Institute of Technology, USA 3U.S. Army Research Laboratory, USA
Abstract
A method to efficiently generate a complete aerodynamic description for projectile flight dynamic modeling is described. At the core of the method is an unsteady, time accurate computational fluid dynamics simulation that is tightly coupled to a rigid body dynamics simulation. A set of n short time snippets of simulated projectile motion at m different Mach numbers is computed and employed as baseline data. For each time snippet, aerodynamic forces and moments and the full rigid body state vector of the projectile are known. With time synchronized air loads and state vector information, aerodynamic coefficients can be estimated with a simple fitting procedure. By inspecting the condition number of the fitting matrix, it is straight forward to assess the suitability of the time history data to predict a selected set of aerodynamic coefficients. To highlight the merits of this technique it is exercised on example data for a fin stabilized projectile. The technique is further exercised for a fin and spin stabilized projectile using simulated data from a standard trajectory code. Keywords: projectile, flight dynamics, aerodynamic coefficients, CFD.
1 Introduction
There are roughly four classes of techniques to predict aerodynamic forces and moments on a projectile in atmospheric flight: empirical methods, wind tunnel testing, computational fluid dynamics simulation, and spark range testing. Empirical techniques aerodynamically describe the projectile with a set of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 31
doi:10.2495/CBAL070041

geometric properties (diameter, number of fins, nose type, nose radius, etc) and catalog aerodynamic coefficients of many different projectiles as a function of these features. The database of aerodynamic coefficients as a function of projectile features is typically obtained from wind tunnel or spark range tests. This data is fit to multivariable equations to create generic models for aerodynamic coefficients as a function of these basic projectile geometric properties. Examples of this approach to projectile aerodynamic coefficient estimation include Missile DATCOM, PRODAS, and AP98 [1–6]. The advantage of this technique is that it is a general method applicable to any projectile. However, it is the least accurate method of the four methods mentioned above, particularly for new configurations that fall outside the realm of projectiles used to form the basic aerodynamic database. The empirical method has been found very useful in conceptual design of projectiles where rapid and inexpensive estimates of aerodynamic coefficients are needed. In wind tunnel testing, a specific projectile is mounted in a wind tunnel at various angles of attack with aerodynamic forces and moments measured at various Mach numbers using a sting balance. Wind tunnel testing has the obvious advantage of being based on direct measurement of aerodynamic forces and moments on the projectile. It is also relatively easy to change the wind tunnel model to allow detailed parametric effects to be investigated. The main disadvantage to wind tunnel testing is that it requires a wind tunnel and as such is modestly expensive. Furthermore, dynamic derivatives such as pitch and roll damping as well as Magnus force and moment coefficients are difficult to obtain in a wind tunnel and require a complex physical wind tunnel model. Wind tunnel testing is often used during projectile development programs to converge on fine details of the aerodynamic design of the shell [7,8]. In computational fluid dynamics (CFD) simulation, the fundamental fluid dynamic equations are numerically solved for a specific configuration. The most sophisticated computer codes are capable of unsteady time accurate computations using the Navier–Stokes equations. Examples of these tools include, for example, CFD++, Fluent, and Overflow-D. Over the past couple of decades, tremendous strides have been made in the application of CFD to prediction of aerodynamic loads on air vehicles, including projectiles. CFD is based on first principles and does not involve physical testing. It is a general method that is valid for any projectile configuration. However, CFD is computationally expensive and requires powerful computers to obtain results in a reasonably timely manner [9–22]. In spark range aerodynamic testing, a projectile is fired through an enclosed building. At a discrete number of points during the flight of the projectile (< 30) the state of the projectile is measured using spark shadowgraphs [23–27]. The projectile state data is subsequently fit to a rigid 6 degree-of-freedom projectile model using the aerodynamic coefficients as the fitting parameters [28–30]. Spark range aerodynamic testing is considered the gold standard for projectile aerodynamic coefficient estimation. It is the most accurate method for obtaining aerodynamic data on a specific projectile configuration. It usually the most expensive alternative, requires a spark range facility, and strictly speaking is only valid for the specific projectile configuration tested.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
32 Computational Ballistics III

Various researchers have used CFD to estimate aerodynamic coefficient estimation of projectiles. Early work focused on Euler solvers applied to steady flow problems while more recent work has solved the Reynolds averaged Navier–Stokes equations and Large Eddy Simulation Navier Stokes equations for both steady and unsteady conditions [9–22]. For example, to predict pitch damping Weinacht prescribed projectile motion to mimic a typical pitch damping wind tunnel test in a CFD simulation to estimate the different components of the pitch damping coefficient of a fin stabilized projectile [31]. Excellent agreement between computed and measured pitch damping was attained. Algorithm and computing advances have also led to coupling of CFD codes to projectile rigid body dynamics codes for simulation of free flight motion of a projectile in a time accurate manner. Aerodynamic forces and moments are computed with the computational fluid dynamics solver while the free flight motion of the projectile is computed by integrating the rigid body dynamic (RBD) equations of motion. The ability to simulate the flight of a projectile using first principles has led to the notion of “virtual fly outs” where the simulation tools above are used to replicate a spark range test. Along these lines, Sahu achieved excellent agreement between spark range measurements and a coupled CFD/RBD approach for a finned stabilized projectile [32]. Projectile position and orientation at down range locations consistent with a spark range test were extracted from the output of the CFD/RBD software to compute aerodynamic coefficients. Standard range reduction software was utilized for this purpose with good agreement obtained when contrasted against example spark range results. While coupled CFD/RBD simulation is now capable of replicating time accurate projectile motion, computing time for this type of analysis is exceedingly high and does not currently represent a practical method for typical flight dynamic analysis such as impact point statistics (CEP) computation where thousands of fly outs are required. Furthermore, this type of analysis does not allow the same level of understanding of the inherent underlying dynamics of the system that rigid body dynamic analysis using aerodynamic coefficients yields. However, the coupled CFD/RBD approach does offer an ideal way to rapidly compute the aerodynamic coefficients needed for rigid 6 degree-of-freedom simulation. During a time accurate CFD/RBD simulation, aerodynamic forces and moments and the full rigid body state vector of the projectile are generated at each time step in the simulation. This means that aerodynamic forces, aerodynamic moments, position of the mass center, body orientation, translational velocity, and angular velocity of the projectile are all known at the same time instant. With time synchronized air load and state vector information, the aerodynamic coefficients can be estimated with a simple fitting procedure. This paper creates a method to efficiently generate a complete aerodynamic model for a projectile in atmospheric flight using n short time histories at m different Mach numbers with an industry standard time accurate CFD/RBD simulation. The technique is exercised on example CFD/RBD data for a small fin stabilized projectile. The technique is further exercised for a fin and spin stabilized projectile using simulated data from a standard trajectory code.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 33

Parametric trade studies investigating the number of time snippets and the length of each time snippet to obtain accurate aerodynamic coefficients are reported.
2 Projectile CFD/RBD simulation
The projectile CFD/RBD algorithm employed here combines a rigid six degree of freedom projectile flight dynamic model with a three dimensional, time accurate CFD simulation. The RBD dynamic equations are integrated forward in time where aerodynamic forces and moments that drive motion of the projectile are computed using the CFD algorithm. The RBD projectile model allows for 3 translation degrees of freedom and 3 rotation degrees of freedom. As shown in Figure 1, the I frame is attached to the ground while the B frame is fixed to the projectile with the BI axis
pointing out the nose of the projectile and the BJ and BK unit vectors forming a right handed triad. The projectile state vector is comprised of the inertial position components of the projectile mass center ( , ,x y z ), the standard aerospace sequence Euler angles ( , ,φ θ ψ ), the body frame components of the projectile mass center velocity ( , ,u v w ), and the body frame components of the projectile angular velocity vector ( , ,p q r ). Both the translational and rotational dynamic equations are expressed in the projectile body reference frame. The standard rigid projectile, body frame equations of motion are given by Equations 1 through 4.
−−++−
=
wvu
cccsscssscccsssscsscscsccsscc
zyx
θφθφθ
ψφψθφψφψθφψθ
ψφψθφψφψθφψθ
(1)
−=
rqp
cccssctcts
θφθφ
φφ
θφθφ
ψθφ
//001
(2)
−−
−−
=
wvu
pqpr
qr
mZmYmX
wvu
00
0
///
(3)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
34 Computational Ballistics III

[ ] [ ]
−−
−−
=
−
rqp
Ipq
prqr
NML
Irqp
00
01 (4)
Note that the total applied force components ( , ,X Y Z ) and moment components ( , ,L M N ) contain contributions from weight and aerodynamics. The aerodynamic portion of the applied loads in Equations 3 and 4 is computed using the CFD simulation and passed to the rigid body dynamic simulation.
Figure 1: Reference frame and position definitions.
On the other hand, the CFD flow equations are integrated forward in time where the motion of the projectile that drives flow dynamics are computed using the RBD algorithm. The complete set of 3-D time-dependent Navier–Stokes equations is solved in a time-accurate manner for simulation of free flight. The commercially available code, CFD++17-20, is used for the time-accurate unsteady CFD simulations. The basic numerical framework in the code contains unified-grid, unified-physics, and unified-computing features. The 3-D, time-dependent Reynolds-averaged Navier–Stokes (RANS) equations are solved using the following finite volume equation.
( )V V
WdV F G dA HdVt∂
+ − =∂ ∫ ∫ ∫ (5)
where W is the vector of conservative variables, F and G are the inviscid and viscous flux vectors, respectively, H is the vector of source terms, V is the cell
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 35

volume, and A is the surface area of the cell face. A second-order discretization is used for the flow variables and the turbulent viscosity equation. The turbulence closure is based on topology-parameter-free formulations. Two-equation higher order RANS turbulence models are used for the computation of turbulent flows. These models are ideally suited to unstructured book-keeping and massively parallel processing due to their independence from constraints related to the placement of boundaries and/or zonal interfaces. A dual time-stepping approach is used to integrate the flow equations to achieve the desired time-accuracy. The first is an “outer” or global (and physical) time step that corresponds to the time discretization of the physical time variation term. This time step can be chosen directly by the user and is typically set to a value to represent 1/100 of the period of oscillation expected or forced in the transient flow. It is also applied to every cell and is not spatially varying. An artificial or “inner” or “local” time variation term is added to the basic physical equations. This time step and corresponding “inner-iteration” strategy is chosen to help satisfy the physical transient equations to the desired degree. For the inner iterations, the time step is allowed to vary spatially. Also, relaxation with multigrid (algebraic) acceleration is employed to reduce the residues of the physical transient equations. It is found that an order of magnitude reduction in the residues is usually sufficient to produce a good transient iteration. The projectile in the coupled CFD/RBD simulation along with its grid moves and rotates as the projectile flies downrange. Grid velocity is assigned to each mesh point. For a spinning and yawing projectile, the grid speeds are assigned as if the grid is attached to the projectile and spinning and yawing with it. In order to properly initialize the CFD simulation, two modes of operation for the CFD code are utilized, namely, an uncoupled and a coupled mode. The uncoupled mode is used to initialize the CFD flow solution while the coupled mode represents the time accurate coupled CFD/RBD solution. In the uncoupled mode, the rigid body dynamics are specified. The uncoupled mode begins with a computation performed in “steady state mode” with the grid velocities prescribed to account for the proper initial position ( 0 0 0, ,x y z ), orientation ( 0 0 0, ,φ θ ψ ),
and translational velocity ( 0 0 0, ,u v w ) components of the complete set of initial conditions to be prescribed. After the quasi-steady state solution is converged, the initial spin rate ( 0p ) is included and a new quasi-steady state solution is obtained. A sufficient number of time steps are performed so that the angular orientation for the spin axis corresponds to the prescribed initial conditions. This steady state flow solution is the starting point for the coupled solution. For the coupled solution, the mesh is translated back to the desired initial position ( 0 0 0, ,x y z ) and the remaining angular velocity initial conditions ( 0 0,q r ) are then added. In the coupled mode, the aerodynamic forces and moments are passed to the RBD simulation which propagates the rigid state of the projectile forward in time.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
36 Computational Ballistics III

Figure 2: Projectile orientation definitions.
3 Flight dynamics projectile aerodynamic model
The applied loads in Equations 3 and 4 are expressed in the body reference frame and split into contributions due to weight and body aerodynamic force as shown below.
2 2 20 2
2 2
( ) /
/ /8 2
/ /2
X X
NA YPA
NA YPA
C C v w VX spDY W s c V D C v V C w VV
Z c c pDC w V C v VV
θ
φ θ
φ θ
π ρ
+ + −
= − − +
(6)
The air loads can be further split into a steady air loads component that acts at the center of pressure and a Magnus air loads component that acts at the center of Magnus. The terms containing YPAC constitute the Magnus air loads component
while the terms containing 0 2, ,X X NAC C C define the loads acting at the center of pressure. The externally applied moment about the projectile mass center is composed of an unsteady aerodynamic moment along with terms due to the fact that the center of pressure and center of Magnus are not located at the mass center.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 37

2 3
2
8 2 2
2 2
LDD LP
MA MQ NPA
MA MQ NPA
pDC CVL
w qD pD vM V D C C CV V V V
N v rD pD wC C CV V V V
π ρ
+ = + + − + +
(7)
The terms involving MAC accounts for the center of pressure being located off
the mass center while the terms involving NPAC accounts for the center of Magnus being located off the mass center. In Equations 1 and 2, the aerodynamic coefficients and the distances from the aerodynamic force components to the projectile mass center are all a function of local Mach number. Typically in flight dynamic trajectory computer codes, this dependence on Mach number is handled through a table look-up scheme.
4 Aerodynamic coefficient estimation
The time accurate coupled CFD/RBD simulation provides a full flow solution including the aerodynamic portion of the total applied force and moment ( , , , , ,X Y Z L M N ) along with the full state of the rigid projectile ( , , , , , , , , , , ,x y z u v w p q rφ θ ψ ) at each time step in the solution. The rigid state of the projectile is used to obtain the weight portion of the applied force so that the aerodynamic force can be isolated. Using the information provided by the coupled CFD/RBD simulation, it is desired to compute all aerodynamic coefficients: 0 2, , ,X X NA YPAC C C C , , , , ,LDD LP MA MQ NPAC C C C C . For a fin-stabilized projectile, the Magnus force and moment are usually sufficiently small so that YPAC and NPAC are set to zero and removed from the fitting procedure to be described below. To estimate the aerodynamic coefficients near a particular Mach number, a set of n time accurate coupled CFD/RBD simulations are created over a relatively short time period. The initial conditions for the set of n time histories are generated to produce a rich database of aerodynamic loads and projectile states so that a unique solution can be obtained for the aerodynamic coefficients. The initial conditions for the rigid projectile states are Gaussian random numbers with a mean and standard deviation selected to cover normal operating conditions for the projectile. Since the aerodynamic coefficients to be estimated depend on local Mach number, the set of n time histories is repeated at m different Mach numbers of interest. Thus a total of *n m short time accurate coupled CFD/RBD trajectories are generated to support computation of a complete set of aerodynamic coefficients for flight dynamic simulation.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
38 Computational Ballistics III

Since initial conditions for a given set of n time histories are randomly generated and because Mach number changes during a simulation, Mach number varies slightly even for a set of time histories intended to be generated at a particular Mach number. Hence, at a particular Mach number, all aerodynamic coefficients are assumed to vary linearly with Mach number. Parameters at intermediate values of Mach number were linearly interpolated as shown,
( )( ) M MC M C C CM M
−− + −
+ −
−= + −
− (8)
where C− and C+ are the aerodynamic coefficient values at Mach numbers
slightly less than ( M − ) and slightly greatly than ( M + ) the target Mach number. This general form for the aerodynamic coefficients is then substituted into the aerodynamic force and moment equations. Note that all aerodynamic coefficients that are to be estimated appear in the force and moment equations in a linear fashion suggesting a linear least squares approach to estimate the aerodynamic coefficients at each Mach number. Define the vectors XP , YZP , LP , and MNP as vectors containing all the unknown aerodynamic coefficients that are to be estimated at a given target Mach number. 0 0 2 2X X X X XP C C C C− + − + = (9)
YZ NA NA YPA YPAP C C C C− + − + = (10)
L LP LP LDD LDDP C C C C− + − + = (11)
MN MA MA MQ MQ NPA NPAP C C C C C C− + − + − + = (12)
Denote the total number of unknowns as j . For a fin stabilized projectile,
14j = while for a spin stabilized projectile 18j = . Assuming each time history contains k time simulation output points, then *k n linear equations in j unknowns are generated at each target Mach number.
X X XA P B= (13) YZ YZ YZA P B= (14)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 39

L L LA P B= (15)
MN MN MNA P B= (16) Provided the matrices XA , YZA , LA , and MNA are maximal rank, a unique
solution for XP , YZP , LP , and MNP exists. Thus, properties of the matrices above, such as the rank or singular values, can be used as an indicator of the suitability of the CFD/RBD simulation data in estimating the aerodynamic coefficients at the target Mach number.
5 Results
In order to exercise the method developed above, a detailed comparison of the aerodynamic forces and moments for a typical finned projectile are shown in Figures 3–8. Mach number varied from 3.03 to 2.97, covering 0.07 s and containing 3317 points. The projectile had the following properties: mass of 4.84x10-1 kg, length of 1.259x10-1 m, diameter of 1.319x10-2 m, and axial inertia of 7.4x10-7 kg-m2. The estimated data is generated using Equations 5 and 6 with the identified aerodynamic coefficients. Aerodynamic forces and moments agree well, particularly the Y and Z components which appear coincident in the plotted data. The CFD/RBD data appears slightly noisy in both the axial force and rolling moment. However, the estimated data removes the noise. Figures 9–17 present estimation results for an example finned projectile and an example spin stabilized projectile. The finned projectile is a 120 mm direct fire kinetic energy round while the spin stabilized projectile is a 155 mm shell. Synthetic CFD/RBD data was generated using a rigid 6 DOF trajectory simulation. The solid lines correspond to the coefficient values used to generate the synthetic CFD/RBD data. The “square” symbols represent the finned projectile aerodynamic coefficient estimations and the “circle” symbols represent the spin stabilized aerodynamic coefficient estimations. In Figure 14, Cmq values for the finned projectile are scaled by a factor of 1/40 so that data for both rounds is easily viewed. The spin stabilized projectile cover a Mach range from 0.6 to 4, while the finned projectile covers a Mach range from 1 to 4. One thousand output points were used from each of the 25 runs at each Mach number of interest. For the finned projectile, each run had random initial conditions for angular rates with a zero mean and a Gaussian standard deviation of 3 rad/s for roll rate and 2 rad/s for pitch and yaw rates. For the spin stabilized projectile, each run had random initial conditions for roll rate with a mean value of 900 rad/s and Gaussian standard deviation of 10 rad/s. Parametric trade studies were conducted to determine the effect of the number of runs needed for convergence of the aerodynamic coefficients as well as the effect of the length of the time snippet on convergence. Figures 18–23 present results for CX2 and CMQ as a function of the number of runs used for estimation. The number of runs at each Mach number was varied to values of 4,
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
40 Computational Ballistics III

6, and 10. The number of output points was 1 for all runs. Note that for 10 runs, the aerodynamic coefficients are converged. The effect of the number of data points in each time snippet was also investigated. Three values were considered: 1, 2, and 5. The number of runs at each Mach number is 6 and the snippet length equals 0.1 s. While not shown, all aerodynamic coefficients converged with 5 data points.
Figure 3: Estimated (dashed) and CFD/RBD (solid) body axis axial force versus time.
Figure 4: Estimated (dashed) and CFD/RBD (solid) body axis side force versus time.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 41

Figure 5: Estimated (dashed) and CFD/RBD (solid) body axis vertical force versus time.
Figure 6: Estimated (dashed) and CFD/RBD (solid) body axis rolling moment versus time.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
42 Computational Ballistics III

Figure 7: Estimated (dashed) and CFD/RBD (solid) pitching moment versus time.
Figure 8: Estimated (dashed) and CFD/RBD (solid) yawing moment versus time.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 43

Figure 9: CX0 versus mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
Figure 10: CX2 versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
44 Computational Ballistics III

Figure 11: CNA versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
Figure 12: CLP versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 45

Figure 13: CLDD versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
Figure 14: CMQ versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
46 Computational Ballistics III

Figure 15: Stationline center of pressure versus Mach number (square = spin stabilized projectile, circle = finned projectile; solid line = data, symbols = estimated).
Figure 16: CYPA versus Mach number for spin stabilized projectile (dashed line = data, symbols = estimated).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 47

Figure 17: Stationline center of Magnus force versus Mach number for spin stabilized projectile (solid line = data, symbols = estimated).
Figure 18: CX2 versus Mach number: 1 data point per time snippet, 4 time snippets.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
48 Computational Ballistics III

Figure 19: CX2 versus Mach number: 1 data point per time snippet, 6 time snippets.
Figure 20: CX2 versus Mach number: 1 data point per time snippet, 10 time snippets.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 49

Figure 21: CMQ versus Mach number: 1 data point per time snippet, 4 time snippets.
Figure 22: CMQ versus Mach number: 1 data point per time snippet, 6 time snippets.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
50 Computational Ballistics III

Figure 23: CMQ versus Mach number: 1 data point per time snippet, 10 time snippets.
Using a time accurate computational fluid dynamics simulation that is tightly coupled to a rigid body dynamics simulation, a method to efficiently generate a complete aerodynamic description for projectile flight dynamic modeling is described. A set of n very short time snippets of simulated projectile motion at m different Mach numbers is computed and employed as baseline data. The combined CFD/RBD analysis computes time synchronized air loads and projectile state vector information, leading to a straight forward fitting procedure to obtain the aerodynamic coefficients. The estimation procedure decouples into 4 sub problems that are each solved via linear least squares. By inspecting the condition number of each fitting matrix, the suitability of the time history data to predict a selected set of aerodynamic coefficients can be assessed. The overall method has been shown to work well for both fin and spin stabilized projectiles. As would be expected, convergence of the aerodynamic coefficients is strongly influenced by the number of time snippets and the number of points in each time snippet. This technique provides a new means for the CFD analyst to predict aerodynamic coefficients for flight dynamic simulation purposes. While CFD/RBD is computationally intensive, the method described in this paper provides a means to monitor progress in estimating aerodynamic coefficients through the individual fitting matrices.
6 Conclusions
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 51

Nomenclature
zyx ,, : Components of position vector of mass center in an inertial reference frame.
ψθφ ,, : Euler roll, pitch, and yaw angles of box. wvu ,, : Components of velocity vector of mass center in body reference frame. rqp ,, : Components of angular velocity vector in body reference frame.
zyx FFF ,, : Total applied force components in body reference frame.
zyx MMM ,, : Total applied moment components about mass center in body reference frame. V : Magnitude of relative aerodynamic velocity vector of mass center. ρ : Air density. D : Projectile diameter. α : Aerodynamic angle of attack. Cx0: Zero yaw drag aerodynamic coefficient. Cx2: Yaw drag aerodynamic coefficient. Cna: Normal force due to angle of attack aerodynamic coefficient. Cypa: Magnus force aerodynamic coefficient. Clp: Roll damping aerodynamic coefficient. Cldd: Fin cant aerodynamic coefficient. Cmq: Pitch damping moment aerodynamic coefficient. Dcop: Distance from the mass center to the center of pressure. Dmag: Distance from the mass center to the center of Magnus. CFD: Computational Fluid Dynamics.
References
[1] J. Sun, R. Cummings, “Evaluation of Missile Aerodynamic Characteristics Using Rapid Prediction Techniques,” Journal of Spacecraft and Rockets, Vol 21, No 6, pp 513-520, 1984.
[2] F. Moore, “The 2005 Version of the Aeroprediction Code (AP05),” AIAA 2004-4715, AIAA Atmospheric Flight Mechanics Conference, Providence, Rhode Island, 2004.
[3] T. Sooy, R. Schmidt, “Aerodynamic Predictions, Comparisons, and Validations Using Missile DATCOM and Aeroprediction 98,” AIAA-2004-1246, AIAA Aerospace Sciences Meeting and Exhibit, Reno, Nevada, 2004.
[4] J. Simon, W. Blake, “Missile DATCOM – High Angle of Attack Capabilities,” AIAA-1999-4258, AIAA Atmospheric Flight Mechanics Conference, Portland, Oregon, 1999.
[5] A. Neely, I. Auman, “Missile DATCOM Transonic Drag Improvements for Hemispherical Nose Shapes,” AIAA-2003-3668, AIAA Applied Aerodynamics Conference, 2003.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
52 Computational Ballistics III

[6] W. Blake, “Missile DATCOM – 1997 Status and Future Plans,” AIAA-1997-2280,” AIAA Applied Aerodynamics Conference, Atlanta, Georgia, 1997.
[7] A. Dupuis, C. Berner, “Wind Tunnel Tests of a Long Range Artillery Shell Concept,” AIAA-2002-4416, AIAA Atmospheric Flight Mechanics Conference, Monterey, California, 2002.
[8] C. Berner, A Dupuis, “Wind Tunnel Tests of a Grid Fin Projectile Configuration,” AIAA-2001-0105, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2001.
[9] J. Evans, “Prediction of Tubular Projectile Aerodynamics Using the ZUES Euler Code,” Journal of Spacecraft and Rockets, Vol 26, No 5, pp 314-321, 1989,
[10] W. Sturek, C. Nietubicz, J. Sahu, P. Weinacht, “Applications of Computational Fluid Dynamics to the Aerodynamics of Army Projectiles, Journal of Spacecraft and Rockets, Vol 31, No 2, pp 186-199, 1994.
[11] M. Nusca, S. Chakravarthy, U. Goldberg, “Computational Fluid Dynamics Capability for the Solid-Fuel Ramjet Projectile,” Journal of Propulsion and Power, Vol 6, No 3, 1990.
[12] S. Silton, “Navier-Stokes Computations for a Spinning Projectile from Subsonic to Supersonic Speeds,” Journal of Spacecraft and Rockets, Vol 42, No 2, pp 223-231, 2005.
[13] J. DeSpirito, M. Vaughn, D. Washington, “Numerical Investigation of Canard-Controlled Missile with Planar Grid Fins,” Journal of Spacecraft and Rockets, Vol 40, No 3, pp 363-370, 2003.
[14] M. Graham, P. Weinacht, J. Bennett, “Numerical Investigation of Supersonic Jet Interaction for Finned Bodies, Journal of Spacecraft and Rockets, Vol 37, No 5, pp 675-683, 2000.
[15] P. Weinacht, “Navier-Stokes Prediction of the Individual Components of the Pitch Damping Sum,” Journal of Spacecraft and Rockets, Vol 35, No 5, pp 598-605, 1998.
[16] B. Guidos, P. Weinacht, D. Dolling, “Navier-Stokes Computations for Pointed, Spherical, and Flat Tipped Shells at Mach 3,“ Journal of Spacecraft and Rockets, Vol 29, No 3, pp 305-311, 1992.
[17] P. Weinacht, W. Sturek, “Computation of the Roll Characteristics of a Finned Projectile,” Journal of Spacecraft and Rockets, Vol 33, No 6, pp 769-775, 1996.
[18] S. Park, J. Kwon, “Navier-Stokes Computations of Stability Derivatives for symmetric Projectiles, AIAA-2004-0014, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2004.
[19] N. Qin, K. Ludlow, S. Shaw, J. Edwards, A. Dupuis, “Calculation of Pitch Damping for a Flared Projectile,” Journal of Spacecraft and Rockets, Vol 34, No 4, pp 566-568, 1997.
[20] P. Weinacht, “Coupled CFD/GN&C Modeling for a Smart Material Canard Actuator,” AIAA-2004-4712, AIAA Atmospheric Flight Mechanics Conference, Providence, Rhode Island, 2004.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 53

[21] S. Park, Y. Kim, J. Kwon, “Prediction of Dynamic Damping Coefficients Using Unsteady Dual Time Stepping Method,“ AIAA-2002-0715, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2002.
[22] J. DeSpirito, K. Heavey, ”CFD Computation of Magnus Moment and Roll-Damping Moment of a Spinning Projectile,” AIAA-2004-4713, AIAA Atmospheric Flight Mechanics Conference, Providence, Rhode Island, 2004.
[23] K. Garon, G. Abate, W. Hathaway, “Free-Flight Testing of a Generic Missile with MEMs Protuberances,” AIAA -2003-1242, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2003.
[24] B. Kruggel, “High Angle of Attack Free Flight Missile Testing,” AIAA-1999-0435, AIAA Aerospace Sciences Meeting, Reno, Nevada, 1999.
[25] J. Danberg, A. Sigal, I. Clemins, “Aerodynamic Characteristics of a Family of Cone-Cylinder-Flare Projectiles, Journal of Spacecraft and Rockets, Vol 27, No 4, 1990.
[26] A. Dupuis, “Free-Flight Aerodynamic Characteristics of a Practice Bomb at Subsonic and Transonic Velocities,” AIAA-2002-4414, AIAA Atmospheric Flight Mechanics Conference, Monterey, California, 2002.
[27] G. Abate, R. Duckerschein, W. Hathaway, “Subsonic/transonic Free-Flight Tests of a Generic Missile with Grid Fins, AIAA-2000-0937, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2000.
[28] G. Chapman, D. Kirk, “A Method for Extracting Aerodynamic Coefficients from Free-Flight Data,” AIAA Journal, Vol 8, No 4, pp 753-758, 1970.
[29] G. Abate, A. Klomfass, “Affect upon Aeroballistic Parameter Identification from Flight Data Errors,” AIAA Aerospace Sciences Meeting, Reno, Nevada, 2005.
[30] G. Abate, A. Klomfass, “A New Method for Obtaining Aeroballistic Parameters from Flight Data,” Aeroballistic Range Association Meeting, Freiburg, Germany, 2004.
[31] P. Weinacht, W. Sturek, L. Schiff, “Projectile Performance, Stability, and Free-Flight Motion Prediction Using Computational Fluid Dynamics,“ Journal of Spacecraft and Rockets, Vol 41, No 2, pp 257-263, 2004.
[32] J. Sahu, “Time-Accurate Numerical Prediction of Free-Flight Aerodynamics of a Finned Projectile,” AIAA-2005-5817, AIAA Atmospheric Flight Mechanics Conference, San Francisco, California, 2005.
[33] G. Abate, A. Klomfass, “Affect upon Aeroballistic Parameter Identification from Flight Data Errors,” AIAA-2005-0439, AIAA Aerospace Sciences Meeting, Reno, Nevada, 2005.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
54 Computational Ballistics III

Section 2 Interior ballistics

This page intentionally left blank

Suppression of axial combustion instability in solid rocket motors
D. R. Greatrix
Department of Aerospace Engineering, Ryerson University, Canada
Abstract
A numerical model for the prediction of undesirable axial combustion instability symptoms in solid-propellant rocket motors is utilized in the process of demonstrating various approaches for suppressing this instability behaviour. The unsteady interior one- or two-phase flow in the motor chamber, the oscillation of the surrounding structure of the propellant and motor casing, and the corresponding transient combustion process, are all incorporated within this comprehensive model. Example numerical results are presented for a cylindrical-grain motor having differing characteristics with respect to particle loading and grain geometry (fore and aft cross-sectional area changes), in illustrating the effectiveness of the particular suppression technique being applied. Keywords: solid rocket motor, combustion instability, particles, geometry.
1 Introduction
Over the last fifty years or so, there has been a number of research efforts directed towards understanding the physical mechanisms, or at least the surrounding factors, behind the appearance of symptoms associated with nonlinear axial combustion instability in solid rocket motors (SRMs). The motivation for these studies was and is of course to bring this better understanding to bear in more precisely suppressing, if not eliminating, these symptoms. Research towards predicting instability symptoms in SRMs necessitates comprehensive numerical models for interior ballistic simulation under dynamic flow and combustion conditions. An effective model combines the effects of the unsteady flow, the transient combustion process, and the structural dynamics of the surrounding propellant/casing structure. In the present
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 57
doi:10.2495/CBAL070051

Figure 1: SRM model setup.
investigation, a numerical model incorporating the above attributes is used in the prediction of the unsteady instability-related behaviour in a reference cylindrical-grain motor (sustained axial pressure wave presence, in this case), and various means for instability suppression are in turn demonstrated.
2 Method
A simplified schematic diagram of the physical system of an SRM placed on a static test stand is provided in fig. 1. In this example, the cylindrical-grain motor is free to vibrate radially without any external constraint (i.e., only constrained as indicated by a thick steel static-test sleeve surrounding the aluminum flightweight casing), while axial motion is constrained to a large degree by the thrust-measuring load cell (represented here as a spring/damper) at the lefthand boundary. Under nominal operating conditions, the internal gas flow moves smoothly from the burning propellant surface through and beyond the exhaust nozzle. With respect to modelling the internal flow within the motor, a number of studies for SRMs having larger length-to-diameter (L/D) ratios have incorporated the use of a one-dimensional unsteady flow model, e.g., as done by Loncaric et al [1] and Greatrix [2,3] using a higher-order random-choice method (RCM) for the one- or two-phase flow solution. The effect of such factors as turbulence can be included through one or more additional equations that employ the information from the bulk flow properties arising from the one-dimensional equations of motion for the gas (and for the particles, if a two-phase flow solution). In those cases where two- or three-dimensional flow effects can influence a particular aspect of the motor’s interior ballistic behaviour, one might consider a multi-dimensional flow solution approach if a one-dimensional solution does not capture (or capture adequately) the phenomenon in question. For the purposes of the present study, a one-dimensional RCM approach will be utilized for the unsteady flow solution. Structural vibration can play a significant role in nonsteady SRM interior ballistic behaviour, as evidenced by observed changes in combustion instability symptoms as allied to changes in the structure surrounding the internal flow (e.g., propellant grain configuration, wall thickness, material properties). The
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
58 Computational Ballistics III

level of sophistication required for modelling the motor structure (propellant, casing, static-test sleeve, nozzle) and applicable boundary conditions (load cell on static test stand) can vary, depending on the particular application and motor design. Loncaric et al [1] employed a finite-element approach towards the structural modelling of a star-grain propellant configuration. In the present study, a cylindrical-grain configuration allows for a simpler approach from thick-wall theory, as reported by Greatrix and Harris [4]. The radial deformation dynamics of the propellant/casing/sleeve are modelled by a series of independent ring elements along the length of the motor. Axial motion along the length of the structure is modelled via beam theory, and bounded by the spring/damper load cell at the motor’s head end. Viscous damping is applied in the radial and axial directions. Reference structural properties are assumed for an ammonium-perchlorate/hydroxyl-terminated polybutadiene (AP/HTPB) composite propellant surrounded by an aluminum casing and steel sleeve. For greater accuracy, some properties like the propellant/casing/sleeve assembly’s natural radial frequency may be predetermined via a finite-element numerical solution, rather than via theoretical approximations. The transient burning rate for the regression of the core periphery of the cylindrical propellant grain may be modelled through the Zeldovich-Novozhilov approach; see [5]. This phenomenological modelling technique applies an energy conservation criterion in coupling the heat conduction within the solid phase (the propellant) to the heat produced in the gas phase above the propellant surface. Conveniently, empirical or semi-empirical steady-state burning rate information may be used in place of more complex dynamic flame-based reaction rate equations. The principal equation for the nominal (or unconstrained) instantaneous burning rate rb*, tying the solid phase to the gas phase, is given by:
∫∞−
∗ ∆∂∂
∆−−−=
0
, )/(1 Tdy
tCHTTrr
ssisqsbb (1)
where rb,qs is the quasi-steady burning rate (value for burning rate as estimated from steady-state information for a given set of local flow conditions), Ts is the burning surface temperature at the spatial position y = 0, Ti is the initial propellant temperature (y < 0 moving deeper into the propellant), and T = T(y,t) – Ti is the temperature distribution within the propellant. The transient heat conduction in the solid phase can be solved by an appropriate finite-difference scheme. As reported by Greatrix [5], the actual instantaneous burning rate rb may be found as a function of rb* through the rate limiting equation:
)( bbbb rrK
dtdr
−= ∗ (2)
The rate limiting coefficient Kb effectively damps the unconstrained burning rate rb* when for a finite time increment ∆t:
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 59

t
Kb ∆<
1 (3)
The quasi-steady burning rate rb,qs can be found as a function of various parameters; in this study, as a function of local static pressure p, core flow velocity u (erosive burning component), and normal/lateral/longitudinal acceleration such that: aupqsb rrrr ++=, (4) The equations needed for the coupled solution of rb,qs may be found in [1] and [3].
3 Results and discussion
The reference SRM for this investigation is a cylindrical-grain motor employing a nonaluminized AP/HTPB propellant, with characteristics, such as the solid propellant’s specific heat Cs, as reported by Greatrix and Harris [4]; some parameters have been updated or added for the current effort. A thin steel sleeve of 4.7-mm thickness is in place for the reference static-test simulations. In fig. 2, one can view the general combustion response (here, in terms of nondimensional limit magnitude M , defined by
obpeakqsb
obpeakb
rrrr
M,,,
,,
−
−= , (5)
where unity would indicate a flat response) of the reference solid propellant, at differing values of the net surface heat release ∆Hs (sign convention: positive with exothermic output of heat). The propellant’s resonant frequency fr of approximately 1 kHz is established via the value set for Kb (20000 s-1). The value of 1 kHz is consistent with regard to being within the range of observed values for composite propellants at typical base burning rates, and will allow for close to the worst-case scenario in being similar to the fundamental axial resonant pressure wave frequency f1L. In an actual test firing for evaluation of an SRM’s susceptibility to nonlinear axial combustion instability symptoms, after the initial travelling pulse disturbance is introduced into the flow of the motor chamber, an unstable motor will exhibit a sustained axial compression wave, on occasion accompanied by a substantial increase in the base chamber pressure (referred to as a dc shift). An initial pulsed-firing simulation run was completed as a starting reference for this study, in which no particles are present or any other suppression technique being applied. In fig. 3 for head-end pressure pc as a function of time, one can see that at some point, the principal compression wave reaches its quasi-equilibrium strength from an initial disturbance pressure ∆pd of 2 atm, the sustained compression wave front arriving about every 1 ms,
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
60 Computational Ballistics III

Frequency, Hz
0 1000 2000 3000
Lim
it M
agni
tude
0
5
∆Ηs = +30000 J/kg∆Ηs = +100000 J/kg∆Ηs = +150000 J/kg
Figure 2: Frequency response of ref. propellant (Kb = 20000 s-1; differing values for ∆Hs; rb,o = 1.27 cm/s) in terms of nondimensional magnitude.
oscillating at the fundamental frequency f1L of 1 kHz. The base pressure is not appreciably elevated over the nominal operating chamber pressure. The effect of normal acceleration on the burning process (related to the radial vibration of the motor propellant/casing; see [2,3]) has been nullified for this simulation (in order to isolate frequency-dependent Z-N combustion response as the predominant instability symptom driver for this and subsequent runs discussed in this paper), a factor in reducing the development of a dc shift. One can note that the limit pressure wave magnitude (∆pw, peak-to-trough) is decreasing gradually with time after first reaching its quasi-equilibrium level, as the cylindrical grain burns back and the base pressure rises. One can refer to fig. 4 for the pressure-time profile for the same motor, but now with 5% particle loading (by mass) of inert spherical aluminium particles having a 12-µm diameter. Suppression of axial wave development after an initial 2-atm pulse is near-complete (limit magnitude of the sustained pressure wave, at 0.26 s, is about 0.042 MPa [∆pw], as compared to 1.42 MPa for the 0% loading case noted earlier [∆pw,peak], giving a nondimensional attenuation Ma, defined by
peakw
wpeakwa p
ppM
,
,
∆
∆−∆= , (6)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 61

Time, s0.10 0.15 0.20 0.25
Pre
ssur
e, M
Pa
10
11
12
13
Figure 3: Predicted head-end pressure-time profile, reference motor (Kb =
20000 s-1, ∆Hs = 150000 J/kg, ∆pd = 2 atm, αp = 0%), acceleration nullified.
a value of 0.97, noting a value of unity is complete suppression). Historically, suppression of high-frequency tangential and radial pressure waves in SRMs by the use of particles in the range of 1 to 3% loading by mass has been in general largely successful. In the case of axial pressure waves, the effectiveness of particles from 1% to over 20% loading in suppressing wave development has been less consistent, relative to the previously mentioned transverse cases. In the case of fig. 4, remembering that acceleration as a factor has been nullified in the combustion process, a loading of 5% at 12 µm does appear to effectively suppress axial wave development in this particular motor, at this point in its firing. An attenuation map for the above motor is provided in fig. 5. Here, various Ma curves are displayed as a function of aluminium particle diameter, with each curve being at a particular loading percentage. The case of fig. 4 is the approximate peak Ma point of the 5% loading curve in fig. 5. The x-axis in essence represents the 0% loading case (no suppression at any particle diameter). The same juncture in the firing simulations is the time reference for each point (0.26 s). Dobbins and Temkin [6], via acoustic (weak-wave) theory for low-Reynolds-number flow of a gas-particle mixture, reported the following well-known relation for the optimum particle diameter dopt in attenuating pressure waves:
m
opt fd
ρπµ9
= (7)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
62 Computational Ballistics III

Time, s0.10 0.15 0.20 0.25
Pre
ssur
e, M
Pa
10
11
12
13
Figure 4: Predicted head-end pressure-time profile, reference motor (Kb = 20000 s-1, ∆Hs = 150000 J/kg, ∆pd = 2 atm, αp = 5%, dm = 12 µm), acceleration nullified.
Here, µ is the gas absolute viscosity, ρm is the particle solid density, and f is the frequency of the oscillating axial pressure wave. For the present motor, eq. (7) would suggest a dopt of around 9.2 µm, while fig. 5 suggests peak attenuation occurs at particle diameters of around 10 to 25 µm at very low loadings (around 1% for αp, peak appears as a plateau range), narrowing and dropping somewhat towards 12 µm as one increases the loading from 1% towards 5%, and then again a spreading range (plateau peak) from that figure of 12µm at even higher loadings. It is not surprising that there would be a difference from the predicted acoustic-theory attenuation, given that the low-speed, weak-wave assumptions inherent in eq. (7) are not being presumed in generating the higher-flow-speed numerical results of fig. 5, specifically where both laminar- and turbulent-flow drag between the spherical particles and gas may in fact be present as a predominant attenuation/loss mechanism. An alternative or complementary approach to the use of particles is to change the internal grain geometry to improve the suppression of observed symptoms. In practice, one sometimes notes that c.i. symptoms only occur within a certain timeframe within a given motor design’s firing, suggesting that the grain shape during that interim period is somehow more susceptible to pressure-wave or dc shift development. Conversely then, outside of that time period, something about the grain’s shape is acting to suppress symptom development. As an example, in fig. 6, one can see a comparison in limiting wave strength (measured
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 63

Diameter, µm
0 10 20 30 40 50
Atte
nuat
ion
0
1αp = 1%αp = 2%αp = 3%αp = 4%
αp = 5%
Figure 5: Nondimensional attenuation as function of particle diameter and loading, reference motor, acceleration nullified.
at the head end) at a later point in the firing with the introduction of a roughly 2:1 cross-sectional core area expansion (moving left to right) through the halfway point on the grain of the reference motor, reducing the pressure wave to about 25% of its reference strength. Note that the nozzle throat diameter was set at 1.7 cm (vs. the reference 1.6 cm) for the expansion case, for a comparable chamber pressure. Positioning the internal grain expansion at the one-quarter and three-quarter grain-length positions respectively was not nearly as effective. Moving to the case of contracting the grain internal core cross-sectional area as one moves left to right, one can see from fig. 7 that at the one-quarter position, this technique is quite impressive in almost fully suppressing wave activity. The nozzle throat diameter was set at 1.68 cm (vs. the reference 1.6 cm) for the contraction case, for a comparable chamber pressure. Positioning the internal grain contraction at the halfway position is still very much effective in suppressing wave activity, while much less effective at the three-quarter position. The analysis undertaken for this paper provides a few examples for how one might suppress, to some degree, instability symptoms within a given motor’s design. By no means are these the only techniques available to the motor designer. Ramohalli [7] provides a good review of a number of techniques that have been attempted over the years.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
64 Computational Ballistics III

Time, s
0.260 0.265
Pre
ssur
e, M
Pa
11
12
13
ref. straight cyl.0.5L/2:1 expansion
Figure 6: Predicted head-end pressure-time profiles, reference motor (Kb =
20000 s-1, ∆Hs = 150000 J/kg, ∆pd = 2 atm, αp = 0%), grain expansion case, acceleration nullified.
Time, s
0.10 0.15
Pre
ssur
e, M
Pa
10.5
11.0
Figure 7: Predicted head-end pressure-time profiles, reference motor (Kb = 20000 s-1, ∆Hs = 150000 J/kg, ∆pd = 2 atm, αp = 0%), grain contraction case, acceleration nullified.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 65

4 Concluding remarks
The implications of such factors as particle loading and grain geometry on nonlinear axial combustion instability symptom development and suppression have been demonstrated by the numerical simulation results presented in this study of a reference cylindrical-grain solid rocket motor. Unquestionably, further work remains to be done in establishing a more complete understanding of the various mechanisms involved in driving instability symptoms, so as to allow for more refined and targeted techniques in suppressing said symptoms.
References
[1] Loncaric, S., Greatrix, D.R. and Fawaz, Z., Star-grain rocket motor — nonsteady internal ballistics. Aerospace Science & Technology, 8(2), pp. 47-55, 2004.
[2] Greatrix, D.R., Nonsteady interior ballistics of cylindrical-grain solid rocket motors. Computational Ballistics II, WIT Press, pp. 281-289, 2005.
[3] Greatrix, D.R., Predicted nonsteady internal ballistics of cylindrical-grain motor. AIAA Paper No. 2006-4427, 2006.
[4] Greatrix, D.R. and Harris, P.G., Structural vibration considerations for solid rocket internal ballistics modeling. AIAA Paper No. 2000-3804, 2000.
[5] Greatrix, D.R., Transient solid-propellant burning rate model: comparisons to experimental data. AIAA Paper No. 2006-4426, 2006.
[6] Dobbins, R.A. and Temkin, S., Measurements of particulate acoustic attenuation, AIAA Journal, 2(6), pp. 1106-1111, 1964.
[7] Ramohalli, K., Technologies and techniques for instability suppression in motors, Nonsteady Burning and Combustion Stability of Solid Propellants, edited by De Luca, L., Price, E.W. and Summerfield, M., Vol. 143, Progress in Astronautics & Aeronautics series, AIAA, Washington D.C., Ch. 20, 1992.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
66 Computational Ballistics III

ICE-ALE modelling for the combustion ofhomogeneous solid propellant
A. Peratta & C. PerattaWessex Institute of Technology, Southampton, UK
Abstract
The paper presents a hybrid Finite Volume Method (FVM) for the laminarcombustion of a double-base (homogeneous) solid propellant burning inside atwo-dimensional narrowed pipe. The approach for the hydrodynamics in the gasphase is based on an Implicit-Continuous Eulerian method, implemented withthe Arbitrary Lagrangian-Eulerian FVM, while the condensed phase is modelledwith an Implicit Eulerian FVM approach. The hypothesis of pre-mixed laminarflame, and homogeneous solid phase are assumed. The formulation is based on theconservation equations of mass, species, momentum and energy.
The processes of degradation and pyrolysis are both taken into account in thesolid phase by means of two finite chemical reactions. The complete chemicalmodel is implemented with 7 unidirectional global finite rate chemical reactionsand 12 reactive species. The outcomes of the model are pressure, temperature,density, heat release, species concentration in gas and solid phase, gas speed andbulk burning rate. The numerical model is time dependent, and it is able to describethe main production of the flame structure, including the induction (dark) zone.The numerical results obtained for the burning rate are in good agreement with theempirically based Saint-Roberts law which relates the burning rate withe the bulkpressure by means of an exponential law. The method has also been proved suitablefor solving time dependent two dimensional chemically reactive flows problemspresenting sub-sonic and super-sonic regimes in the same integration domain.Keywords: combustion, solid homogeneous propellant, double-base, ale, finitevolumes.
1 Introduction
Solid energetic materials are mostly used for rocket propulsion systems in eitherspace or defence industry. Other applications include pyrotechnic actuators,boosters, manoeuvring and safety devices, as well as air-bags for automobile safety
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 67
doi:10.2495/CBAL070061

[1] and gas generators. Among the large family of solid energetic materials arethe “smokeless” homogeneous propellants, developed several decades ago, whichare still in use in many of the above mentioned applications. The homogeneouspropellant, also known as Double-Base propellant (DBP) carries both oxidisingand reducing chemical agents in the same molecular structure, usually composedof a homogeneous mixture of Nitroglycerine (NG) and Nitrocellulose (NC)(NG = C3H5O3(NO2)3, and NC = C6H7O2(NO3)3, respectively) withsome plasticiser and other minor ingredients [2, 3]. Because of this feature, thecombustion of DBPs can be regarded as preliminary mixed from the beginningof the process. Although DBP do not usually have high specific impulses(Is 210s under normal conditions), they are still on high demand due toits smokeless combustion, and their relatively easy manufacturing, they can bemade by solvent or semi-solvent processes and extruded in various shapes. Hence,there is no need to keep into account mixing processes between oxidiser andreducer. Much effort has been done in research oriented to the CFD applied tosolid propellant combustion (see for example [4, 5]). The aim of this work isto develop a comprehensive numerical modelling for the unsteady chemicallyreactive compressible multi-species flow interacting with the solid reactive burningsurface of the DBP. The paper is organised as follows, in section 2 the theoreticalformulation is established. Section 3 provides a brief description of the DB understudy. Section 4 describes the interface boundary conditions, Section 5 presentsthe numerical scheme. Section 6 shows the numerical results obtained in a one-dimensional implementation and finally Section 7 elaborates the correspondingconclusions.
2 Mathematical formulation
The governing equations [6] are basically the following average conservation ofmass, species concentration, momentum and energy equations for a mixture ofNe
species and Nr global chemical reactions:
Mass∂ρ
∂t+ ∇ · (ρu) = 0 (1)
Species∂ (ρYk)∂t
+ ∇ · (ρuYk + qDk
)= ωk (2)
Momentum∂ (ρu)∂t
+ ∇ (utρu + p+ σ
)= 0 (3)
Energy∂ (ρε)∂t
+ ∇ · (ρuε+ qe) + p∇ · u = −Ne∑k=1
ωk∆hTr
k , (4)
where subscript k denotes species, ωk is the reaction constant, Yk the massfraction, p pressure, u, ρ and ε are the average velocity, density and internal energy,
respectively, defined as: ρu :=∑Ne
k=1 ρkuk and ε :=∑Ne
k=1 Yk
(εk − εTr
k
), where
εk = εTr
k +∫ T
Trcv,k(T ′)dT ′, being T and Tr the actual and reference temperatures,
respectively.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
68 Computational Ballistics III

3 Chemical model, thermodynamic and transport properties
The specific rate of j-th global reaction κj,β is calculated by means of Arrheniusexpressions of the form: κj = Bj exp [−E0/R0T ], where E0 is the activationenergy, R0 is the universal gas constant, and Bj ≈ cteTα is the frequency factorwith 0 < α < 0.5 and index j. Thus, j-th rate reaction can be calculated by meansof:
ωRj = κj,f
Ne∏k=1
Cν∗
kj
k ,
where ν∗jk is the stoichiometric coefficient of the reactive species k in reaction j,and Ck is the mole concentration of the species.
The following equation of state (EOS) is considered in the gas phase
p = ρR0T
Ne∑k=1
Yk/Mk
where c2s = p/ρ (1 +Rmix/cvmix); Mk is the molecular mass, Rmix :=R0
∑Ne
k=1 Yk/Mk the mixture constant, cvmix =∑Ne
k=1 Ykcpk − Rmix the mixturespecific heat, and cs the speed of sound. The condensed phase (CP) is consideredincompressible, i.e. infinite sound speed. The specific heat at constant pressure ofeach component is evaluated using: cpk(T ) = Ak+BkT+CkT
2+DkT3+Ek/T
2,where A, B, C, D and E are constants obtained from [7, 8]. Then, the specificinternal energy of the mixture become: cv,mix =
∑Ne
k=1 Ykcpk −Rmix.Transport coefficients of species involved in energetic materials are not always
available in published tables, therefore, they have to be approximated from theclassical statistical theory of gases. The diffusive effects considered in eqs. (1)to (4) are viscosity, Fick’s diffusion and Fourier law for heat conduction. In thisway qD
k = −ρDk,mix∇Yk in (2) is the Fick’s mass diffusive flux, σ is the viscoustensor in (3), and qe = −λmix∇T − ρ
∑Ne
k=1 hkYkuk − ∇(σu) is the diffusiveflux of internal energy. The binary diffusion coefficient between species A andB is calculated by mean of the Chapman–Enskog (C–E) theory and the transportBoltzmann equation [9].
For the multi-component mixture, the effective diffusion coefficient (Dk,mix) ofk with respect to the mixture is related to binary one DAB by means of Wilke’smixing rule [9, 10]:
Dk,mix = (1 −Xk)/
Ne∑
j =k
Xj
Dkj
.
Viscosity for a single component is calculated using C–E theory and L–J potentialaccording to: η = 5/16
√πmkBT/(πσ2ΩD). C–E theory can also be applied to
obtain the thermal conductivity λ of pure mono-atomic species with no internaldegrees of freedom [9, 11], yielding λ = 25/32
√πmkBTcv/(πσ2ΩD). Then,
Eucken’s correction factor given by λMη−1 = 1.32cv + 1.77R0, is used toconsider the internal degrees of freedom in polyatomic molecules, and finally,for the multi-component mixture, Wilke’s rule is used in the same way as forthe viscosity coefficient (η) above. Reference values for the calculation of cross
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 69

sections, dipole moments, and collision integrals can be obtained from refs.[9, 11, 12].
4 The DB propellant
In this work the EC1 formulation (52 % NG + 43% NC + 5% of minor additives)contemplated by A. Kubota [2], with 1100cal/g of heat of explosion has beenadopted. Because of its relatively large stability under room conditions, an externalsource of heat (igniter) must be provided to initiate the DBP burning. Duringthe ignition process, heat is transported by conduction inside the solid and thedegradation reaction of NG and NC begins to accelerate generating reactivespecies like NO2 and aldehydes.
NO2CH O2(CHO)2
H O2
NNOCOCOH O2
2
2
CO2
700K
CO
Secondary
flame
zone
1600K
Induction(dark) zone
Primaryflame
(Fizz zone)
Preheatingzone (F
oam
zo
ne)
293K
2850K
Condensed phase Gas phase
NOC
NGNC
Interface
Figure 1: Temperature, species and regions in condensed and gas phase near theburning surface of the DBP.
Then, further recombination takes place into the solid phase, yielding extraheat to reinforce the ignition. We call condensed phase (CP)to the regionbetween gas and solid phase where solid propellant coexists with degradation andrecombination products.(The CP consists of a pre-heated zone and a superficialdegradation layer where molecular degradation of the propellant and furtherrecombination of the decomposed products takes place.) As degradation evolves,the solid concentration drops down from one to zero. The closer to the burningsurface the higher degradation rates. When solid concentration reaches zeroat the interface, convection process drags the unburnt condensed phase fromthe cold zone of the DBP thus replacing the decomposed material. Then, aconvective chemically reacting flow emerges from the burning surface towardthe gas phase with a velocity ruled by eq.(1). The emerging molecules reactwith each other in the gas phase, developing an important amount of heat inthe flame zone. The distribution of heat release along the flame zone is ruledby the coupling between the gas-phase reactions, hydrodynamics, and transportphenomena, thus yielding a particular flame structure as qualitatively shown inFig. 1. Meanwhile, the heat released in the primary zone provides some feedbackenergy to maintain the degradation reaction in the CP. The combustion can beeither self-sustained steady, unsteady, oscillatory, or vanishing, depending on thisenergetic loop. The modelling involves Nr = 7 chemical reactions, [10, 12] andthe following chemical species: DB, NO2, CH2O, (CHO)2, CO, NO, CO2,
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
70 Computational Ballistics III

H2O, H2, C2H4, N2 and C. The corresponding rate reactions, specific enthalpy,and Arrhenius coefficients were obtained from [12–14].
5 Interface boundary conditions
Gas and CP equations couple to each other throughout the burning surface(interface) by means of the following mass and species conservation equations:
[ρu]gas = ρprb, and [ρuk · nYk]gas = ρprbYk, (5)
respectively, and energy according to:[−λmix
∂T
∂n+ ρ
Ne∑k=1
Ykhkuk · n]
gas
= −λs∂T
∂n+ ρrb
[cp (Ts − Tr) +
Ne∑k=1
Yk∆hk
]s
,(6)
where subscript s refers to the CP, rb is the local propellant burning rate, Ts is theinterface temperature, h is enthalpy and ∆h the enthalpy at reference temperature.Because reactions in the CP have relatively high activation energy and occur in avery thin region (few microns in foamy zone), a matched asymptotic expansiontechnique as described in refs. [15, 13, 14] can be used in order to estimate theburning rate formula. The result for a steady self-sustained combustion is:
r2b ≈ β′ T 2s
Ts − T0 −Qs/(2cs)exp
[ −Ec
R0Ts
]
where β′ := λsBcR0/(cSρsEc) is a constant, T0 ≈ 293K is the initialtemperature equal to the temperature at x→ ∞ in the cold zone of the propellant.The following values were assumed: ρs = 1.6g/cm3, cs = 0.4cal/(gK),λs =5.1 × 10−2cal/(smK), Bc = 1017s−1, and Ec = 40kcal/mol. Thus rb ≈10−2m/s, and consequently: δxc ≈ 37µm, τc ≈ 4ms, δxd ≈ 2µm, τd ≈ 0.2ms,where δx indicates characteristic length, τ residence time, and subscripts c andd pre-heated and foamy zone in the CP, respectively. Note that the typical Machnumber in the flame zone is M ≈ 10−3, this involves an incompressible flowregime which might potentially limit the numerical scheme.
6 Numerical scheme
The gas phase is solved with the Implicit Continuous Eulerian (ICE) method [16]and an Arbitrary Lagrangian–Eulerian (ALE) technique. The region involving thesolid (condensed)-gas phase interface has been modelled with a one-dimensionalapproach oriented perpendicular to the burning boundary. The scheme for bothgas and condensed phases is based on the FVM in which each physical processis integrated in an independent way during one calculation time step. The FVMis implemented with a staggered grid approach where diffusive fluxes (q) areassigned to cell faces, flow velocities (u) to cell vertices and the other fieldvariables such as εmix, T , p, cell volume V , and Yk are assigned to cell centres.The different objects participating in the discretisation are basically cell vertices,
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 71

faces and centres. An update of the cell dynamic property ψ between time levelm and m + 1 is generally written as: ψm+1 = ψm + δψD + δψH + δψS , whereδψD, δψH , and δψS represent the contribution to the total variation of ψ due todiffusive, hydrodynamic and source terms, respectively. Time variations δψD ofeither mass or energy due to either Fick and Fourier diffusion, or species migrationis calculated in a Lagrangian way with an Alternating Direction Implicit (ADI)approach [17]. During the ADI step, all other terms contributing to the variation ofψ apart from the diffusive ones, are considered as frozen. The ICE approach [12,16] is employed in order to update field variables due to the hydrodynamic process(δψH ), i.e. for integrating the pressure-velocity coupling and the kinetic energy ofthe system. Time variations due to source terms (δψS) are integrated explicitly intime. For example, the increment of species concentration and total internal energyin the cell, due to the source terms appearing in (2) and (4) arising from chemical
reactions become: δY m+1k,i = ωm
k,i
ρmiδt, and δ (mε)m+1
i = V mi
∑Ne
k=1 ωmk,i∆hkδt,
respectively, where mi and Vi represent the total mass and volume of cell i.During the Lagrangian step, all convective terms are zero, and the vertices move
with the fluid in order to preserve constant the total mass inside a cell. Becauseof that, after a few time steps the grid may become excessively distorted. Inaddition the cells near any outflow boundary condition may result pushed awayfrom the integration domain. In order to overcome these technical difficulties allmesh vertices are moved backwards, i.e. usually opposite to the flow motion, withan arbitrary numerical velocity ua given by the superposition:
ua = −u + τ
(x∗i − xi
δt
)(7)
where u is the fluid velocity, x∗i are the 2D coordinates of the grid vertices at the
new time level, xi represent the actual location of the vertices, and τ is a relaxationfactor. When τ = 0 the method resembles an Eulerian one. The second term in theright hand side of eq. (7) represents an arbitrary velocity which is added in order toadapt the grid space resolution to the gradient of the developing solution. The newlocation of the grid points is computed in order to obtain a uniform distribution ofthe Lagrangian coordinates Li associated with i-th cell, i.e.:
Li =
x∗1∫
0
x∗2∫
0
w(x′)dx′1dx′2 =
1Nc
, (8)
where Nc is the number of cells, and w = c (1 + ∇ · (b1T + b3YCO2)b2ωk∆hk)is a density distribution function, b1, b2 and b3 are scaling constants, and cis a normalisation factor that makes
∑Nc
i=1 Li = 1 the integral (8) over thewhole integration domain. As a consequence, convective terms are artificiallyrestored, and the mesh tends to increase its resolution in regions with steepgradients ofCO2 concentration and temperature and local peaks of heat release. Adetailed explanation of the scheme and the corresponding pseudo-code is presentedin [10, 12].
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
72 Computational Ballistics III

Figure 2: Conceptual model.
7 Results
The ICE-ALE FV method has been applied to the combustion of a DBP providinginlet flow conditions to the two-dimensional domain shown in Fig. 2. Thegeometrical parameters are length L = 16 cm, inflow and outflow apertureDin = Dout = 5 cm, convergent and divergent angle α = 30. The throat widthand curvature radius are D = 3 cm and R = 2 cm, respectively.
The burning surface is located at x = 0 where the FV version of matchingconditions (5), (6) are prescribed. The cold end of the DBP has T = 293K ,YDB = 1, and Yk = 0 for k = DB. The top and bottom surfaces are consideredas adiabatic walls. The corresponding boundary conditions are implemented bymean of phantom cells and vertices. Smooth outflow boundary conditions like∂(ux, ε, Yk)/δx = 0 are prescribed at the gas exit. The initial conditions areYDB = 1,YN2 = 0, T = 293K at the DB propellant, and YDB = 0,YN2 = 1,T = 650K at the gas phase. An external source of heat has been added in order tomaintain a temperature of 650K during 1ms so that pyrolisys and decompositionendotermic reactions in the solid can start relatively quickly. This external sourcecan be regarded as a simplified representation of an hypothetical ignition system.This transient condition is removed after the combustion becomes self sustained.It has been observed from the numerical experiments that all transient effectsoccurring near the burning front due to ignition and flame structure developmentvanish after approximately t = 0.2s when the process becomes stable. Fig. 3shows the concentration profile of all species in gas phase and CP at t = 0.2s.
The main properties of steady state flame structure is relatively insensible tothe geometry and physical conditions of the bulk of the domain, apart from thebulk pressure which affects the characteristic length scale of the flame. The resultsobtained for temperature and species concentration are in excellent agreement withthe ones previously obtained in [14] and others qualitative descriptions of the flamestructure [15].
Figure 4 shows the temperature distribution, and its development towards thesteady state regime. At time t = 0.09543 s a pseudo-steady state is achieved forthe temperature distribution.
The characteristic velocity near the burning zone is of the order of a few m/s,and the temperature is typically 700C. Therefore the Mach number is of the order10−3, thus representing a quite incompressible behaviour.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 73

1e-06 1e-05 0.0001 0.001 0.01 0.1-0.05 0 0.05 0.1 0.15 0.2 0.25 0.3 0.35
x [m]
(CHO)2CH2O
NO2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45 1e-06 1e-05 0.0001 0.001 0.01 0.1
GAS PHASE
CONO
CO2H2O
H2C2H4
N2C
0
0.2
0.4
0.6
0.8
1
1e-5 2e-6
x [m]
COND.PHASE
YkYk
<----
------
------
Bur
ning
sur
face
(x=0
) ----
------
------
> DB
(CHO)2CH2O
NO2
Figure 3: Species concentration profile near the burning surface in gas andcondensed phases at t = 0.2s.
Figure 4: Temperature at different time levels after the ignition.
In order to test the ability of the ICE method to deal with chemically reactingsubsonic, transonic and supersonic regime at the same time, the DBP was replacedby a constant inflow boundary condition supplying hot reactive gases at 450 m/s.Note that this is an extraordinary high value in comparison with the typicalvelocity found in the gas phase near the burning surface. However, it is usefulas a benchmark test for the hydrodynamic part of the problem. The chemicalcomposition of the flow at the inlet has been imposed in order to match thecorresponding flame composition at steady state in the interface, found in one-dimensional simulations (see Table 1). The temperature at the inlet section wasfixed to 700 K.
Figure 5 shows the Mach number (M = |u|/cs) distribution in the steady state.As expected, the transonic region is located in the narrowed section of the domain,the convergent region is subsonic and the convergent region is supersonic.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
74 Computational Ballistics III

Table 1: Mass concentration of the inlet flow.
Species CO NO CO2 H2O H2 C2H4 N2 C
Y 0.384 0.003 0.318 0.157 0.009 0.003 0.126 0.0
Figure 5: Mach number in a compressible regime.
0.005
0.01
0.015
0.02
0.025
0.03
1 2 3 4 5 6
Bur
ning
Rat
e [m
/s]
Pressure [MPa]
Saint-Roberts’s lawNumerical
Figure 6: Burning rate vs. pressure. Comparison between numerical finding andthe Saint-Robert’s law.
Figure 6 shows the burning rate plotted against the bulk pressure. Thedots represent the values explored during the numerical calculation, while thecontinuous line represents the Saint-Robert’s law (Vieille’s law) given by rb =A(p/p0)n. The exponent n which best fits the numerical relation in a least squaressense is n = 0.76. This value is in good agreement with the expected indices forDBPs.
8 Conclusions
A hybrid approach based on the FVM was developed and tested in order tostudy time dependent combustion problems involving homogeneous Double-Basepropellants. The method is based on an Implicit Continuous Eulerian formulationwith an Arbitrary Lagrangian Eulerian technique and mesh optimisation. Thepresent approach is in principle oriented to compressible flow, however, it resultedquite satisfactory for modelling very low Mach numbers, i.e. order O(10−3). Themethod is suitable for dealing with subsonic, transonic and supersonic regimes atthe same time. After the flame has achieved a steady state, the comparison betweenSaint-Robert’s burning law and the numerical findings are very good. In addition,the scheme has proven to be stable and provided accurate description of the flamestructure and flame dynamics near the burning surface of the propellant. Hence,it can be used to study a variety of 2D time dependent combustion processesincluding transient ignition and combustion instabilities.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 75

References
[1] P. P. Cord and F. Beteille. Versatility of a two chamber inflator forairbag application. In Airbag 2004, 7th Int. Symposium and exhibition onSophisticated car Occupant Safety Systems, Karlsruhe, Germany, 2004.
[2] Aoki N. Kubota. Combustion wave structures of high - and low energydouble-base propellants. AIAA J., 20(1):100–105, 1982.
[3] E. Dick, J. Bulgheroni, R. Crespo, J. Padula, E. Runstein, and L. Urdiain. Lapropulsion de cohetes y misiles (in spanish). Technical Report 685, CITEFA,Bs As, Argentina, 1989.
[4] M. T. Health, R. A. Fiedler, and W. A. Dick. Simulating solid propellantrockets at csar. AIAA Paper, pages 2000–3455, 2000.
[5] H. J. Gibeling, R. K. Madabhushi, F. J. De Long, and J. S. Sabnis. Advancedflow field model. Technical report, U.S.Air Force Philips Lab., 1993. CRPL-TR-3005, Edwards AFB CA.
[6] J. Warnatz, U. Maas, and R.W. Dibble. Combustion. Springer Verlag, 1996.[7] D.R. Stull and H. Prophet. Janaf tables of thermochemical properties, 2nd ed.
Technical report, National Standard Ref. Data System, Washington, 1971.[8] Nat. Inst. of Standards and Tech. The NIST Chemistry WebBook.
http://webbook.nist.gov/, 2005. U.S. Secretary of Commerce.[9] Hirschfelder, Curtis, and Bird. Molecular Theory of gases and Liquids. John
Wiley & Sons, Inc., New York, 1954.[10] A. Peratta, C. Gonzalez, and E. Dick. Numerical analysis for double-base
propellant combustion. In V. Sanchez-Galvez and C.A. Brebbia, editors,Computational Ballistics II, volume 40 of Transactions on Modelling andSimulations, pages 269–278. Wessex Institute, WIT-Press, 2005.
[11] B. E. Poling, J. M. Prausnitz, and John P. O’ Connel. The Properties of gasesand Liquids. McGraw Hill, 5 edition, 2000.
[12] A. Peratta. CFD Aplicado a la Combustion de Propulsantes SolidosHomogeneos. Master’s thesis, University of Buenos Aires, Faculty of Exactand Natural Sciences, October 2001. in spanish.
[13] V. Yang, Thomas Brill, and Wu-Zhen Ren, editors. Solid PropellantChemistry, Combustion, and Motor interior Ballistics, volume 185.American Institute of Aeronautics and Astronautics, New York, 2000.
[14] Tae-Seong Roh, I-Shih Tseng, and Vigor Yang. Effects of acousticoscillations on flame dynamics of homogeneous propellants in rocket motors.J. of Propulsion and Power, 11(4), July August 1995.
[15] G. Lengelle, A. Bizot, J. Duterque, and J.F. Trubert. Fundamentals of solidpropellant combustion. In K.K.Kuo and M. Summerfield, editors, Progress inAstronautics and Aeronautics, AIAA, volume 90, page 361, New York, 1984.
[16] C.W. Hirt, A.A. Amsdem, and J.L.Cook. An arbitrary lagrangian-eulerianmethod for all flow speeds. J. of Computational Physics, 14:227–253, 1974.
[17] G.I. Marchuk. Handbook of Numerical Analysis, volume 1, chapter Splittingand alternating direction methods, pages 197–462. Elsevier, North-Holland,Amsterdam, 1990.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
76 Computational Ballistics III

Stochastic study of 60-mm gun-projectile responses
M. Chen Army Research Laboratory, USA
Abstract
Gun propulsion modeling has been under development for many decades. Starting from lumped parameter computer code, then 1D and 2D approaches and finally by multi-dimensional and multi-phase interior ballistics codes, one has been able to estimate in-bore pressure-time history at a fairly accurate level. However, some underlying assumptions among the models exhibit certain levels of uncertainties, for instance: the time-varying friction between obturator and bore surface; the granular shape variations of propellant charges; the packaging deviations of each propellant load, etc. This study was to investigate in-bore responses of a 60-mm projectile subjected to the inherent randomness of propulsion pressures. The pressure-time curve was modeled with 47 Gaussian variables. A total of 100 pressure samples were then generated through Monte Carlo simulation techniques. Subsequently, the time histories of the highest in-bore velocity, peak acceleration and the maximum von Mises stress responses of the projectile were obtained respectively corresponding to each pressure simulation. The goals were to gain more understanding of how the projectile performs in response to the changes of chamber pressures, and how much variation of the responses should be expected from experimental results under normal circumstances. The significance of the random variables on the projectile responses was outlined as well. Keywords: interior ballistics, 60-mm projectile, IBHVG2, Monte Carlo simulation, stochastic responses.
1 Introduction
The modeling of complex gun propulsion schemes has evolved at a great stride over the past two decades. In the mid 1980s, a lumped-parameter computer code IBHVG2 (Interior Ballistics of High Velocity Gun, version 2), developed by the
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 77
doi:10.2495/CBAL070071

US Army Research Laboratory (ARL, formerly Ballistic Research Laboratory), was available for the calculation of interior ballistic trajectories including time-dependent gas pressure, projectile displacement and velocity [1]. In early 1990s the efforts were extended to 1-D/2-D interior ballistic modeling, where a number of experimental studies have demonstrated space-time-dependent flame spreading processes [2,3]. More details in determining gun distributed pressure field were further taken into account, which led to initial development of next generation model named NGEN [4]. The 3-D, multiphase and computational fluid dynamics based NGEN codes have been used for a number of applications in recent years [5,6]. Nowadays, in-bore pressure-time curve can be estimated at a fairly accurate level. Nevertheless, there are a few factors that are inherently uncontrollable and exhibit certain level of variations when calculating in-bore pressure history. Some of the examples are time-varying frictions between obturator and bore surface, gun barrel manufacturing tolerance, granular shape variations of propellant charges, packaging deviations of each propellant load, distinctive flame spreading path, changing ambient temperature, etc. Many experimental shootings have demonstrated the pressure variations, where the differences from one shot to another may be attributed to one or more of these factors. Understandably, the shot deviations would become even more apparent at war field. Thus, it is important to study how the performance of a projectile is influenced by the stochastic excitations. The objective of this paper was not to model the random nature of each factor individually. Instead, the variations of all the contributing factors were considered as a whole. A nominal pressure-time curve, where the pressure level at each time step was modeled as a Gaussian variable, was utilized for this study.
2 Description of the 60-mm projectile system
A 60-mm gun projectile was chosen for the study. The projectile possessed a total length of 317 mm from nose to tail and an outer diameter of 23.5 mm in the body. It was equipped with a windscreen and a penetrator in the front, having an ogive length and radius of 70.5 mm and 1,380 mm, respectively. Four fins for stabilization were embedded in the tail with fin span of 50 mm. Figure 1 illustrates material configuration from a cross-sectional view of the projectile system. The sabot and windscreen cover were composed of 7075-T651 aluminum alloy. Tungsten material was used for the penetrator. The gun barrel, projectile body and fins were modeled with 17-4 PH stainless steel. The inside of its body was divided into two cavity areas. The forward cavity may carry high explosive payload while the rear cavity was designed to accommodate electronic equipments. The projectile was intended to hit and destroy hostile objects, such as mortars, rockets and artillery. Because of the precision-sensitive mission, it becomes vital to investigate the stochastic responses of the projectile system. A 64-caliber smooth bore gun tube with an inner diameter of 60 mm was used to simulate the projectile firing. The barrel has a total length of 3,840 mm, i.e. in bore travel distance for the projectile. M2 propellants with geometry of 7 perf
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
78 Computational Ballistics III

grain were used for the propulsion. Given a chamber volume of 1.3 liter, a peak breech pressure of 470 MPa was derived from the interior ballistics code IBHVG2. The in-bore structural dynamic analysis of the projectile system except optimized sabot has been previously performed [7]. For computational efficiency in stochastic study, the windscreen and stabilized fins were substituted with equivalent weight such that the center of gravity of the projectile system remained at the same location. The simplification that avoided very fine mesh significantly reduced computational time. The projectile configuration and grids are displayed in Figure 2. This model contained solely hexahedral elements with a total number of 42,984. The entire mass of the projectile system including sabot was approximately 1 kg.
Figure 1: Material configuration of a 60-mm projectile.
Figure 2: Display of 60-mm projectile geometry and mesh.
3 Stochastic modeling
A nominal base pressure-time curve shown in Figure 3 was adopted for the study. A peak pressure of 315 MPa occurred at 2 ms from ignition and the total pressure duration was 4.7 ms. Given the random nature of pressure generation through propellant burning process, the pressure level at each time step was
Cavity (Electronics)
Body (Steel)
Fin (Steel)
Windscreen (Aluminum)
Sabot (Aluminum)
Penetrator (Tungsten)
Nose (Electronics)
Cavity (Electronics)
Body (Steel)
Fin (Steel)
Windscreen (Aluminum)
Sabot (Aluminum)
Penetrator (Tungsten)
Nose (Electronics)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 79

considered as a normally distributed function. As a result, a total of 47 Gaussian variables were required to represent the profile of the stochastic pressures. This modeling may account for the fact that the measured pressure level of every experimental shot differed even with the same gun, the same cartridge and the same projectile. Because the differentiation was not substantial, a coefficient of variation of 3% for the random variables was employed [8]. Note that no additional energy was imposed on the projectile system as opposed to the original pressure curve since the ensemble mean remained the same. To better illustrate the pressure deviations, Figure 4 shows the Gaussian distributions of the base pressures at the time steps of 1.8, 1.9 and 2.0 ms from ignition, respectively. It is a local magnified view in the area of Figure 3. The middle line represents the mean value of the pressure, and the lines above and below stand for one standard deviation from the mean. The bell shapes depict the spread of the random variables. In this paper, HyperStudy software [9] was adopted to perform Monte Carlo simulations. A total of 100 samples were generated for each random variable. As a result, 100 design cases, each with a distinctive time-pressure curve, were constituted. The pressure curves for the first three design cases are shown in Figure 5. Due to low values in the initial stage, the variations are not visible because of scale. The uncommon small double-bumps in high pressure area have to be achieved with complex configurations of propellant charges, which is beyond the scope of the paper.
Figure 3: A nominal base pressure-time history.
In terms of sampling distribution, Figure 6 gives a histogram plot for the random variable #20, i.e. the peak pressure at 2 ms travel time. The histogram passed a normality test at 95% confidence level although a bit right skewed is seen on the chart. In addition, the computed sample average was close to the ensemble average of 315 MPa, indicating that the number of 100 samples was sufficient, i.e. a good representation of the pressure profile. Based on the 100 sampled pressures, the whole design cases were solved with LS-DYNA on Linux
0
50
100 150 200 250 300 350
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 millisecond
Bas
e Pr
essu
re (M
pa)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
80 Computational Ballistics III

Networx Evolocity II cluster, JVN, at the ARL High Performance Computing Center. Each analysis took approximately two hours of CPU time on 8-thread parallel execution. In summary the gun- projectile system was subjected to the described stochastic excitations, the system responses would be stochastic even with a deterministic projectile system.
Figure 4: Gaussian distributions of base pressures at the time steps of 1.8, 1.9 and 2.0 ms from ignition, respectively.
0
50
100
150
200
250
300
350
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Time (ms)
Base
pre
ssur
e (M
Pa)
Case 1 Case 2 Case 3
Figure 5: Pressure curves of the first three design cases.
4 Stochastic responses
The dispersion of in-bore projectile responses including peak velocity, peak acceleration, von Mises stress and travel distance, was obtained. The scattering of the values provided insight into what variations and ranges of the projectile responses should be expected even in a normal circumstance. The derived
280
290
300
310
320
330
340
1.7 1.8 1.9 2 2.1
miliseco nd
µσ−
σ
millisecond
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 81

statistical in-bore data are important for the design of the projectile system and may be further utilized for the analysis of exterior ballistics and terminal effect evaluations.
Figure 6: Histogram of random variable #20, i.e. peak pressure distribution.
A histogram of the maximum in-bore velocity is showed in Figure 7. The average and standard deviation of the velocity were approximately 1551 m/s and 12.4 m/s, respectively. Due to a very low coefficient of variation (COV) of 0.8%, most computed data were centralized at the mean. Given an assumption of Gaussian response, which is acceptable in this case, there was a 99.7% likelihood that the axial velocity responses would fall into the range between 1514 m/s and 1588 m/s, i.e. within three standard deviations of the mean. Figure 8 displays the distribution of peak accelerations. The mean value of the response was 85,000 g. Unlike velocity, the accelerations exhibited high spread, which was because of inconsistent occurrence time, i.e. the peak accelerations occurred at the time step where the peak pressures took place. One can see the time distinction for the peak values of the pressure curves as demonstrated in Figure 5. As a result, the peak accelerations appeared to be a non-Gaussian distribution. In terms of stress responses, a point of the projectile body in which the highest stress happened was selected. The histogram of the von Mises stress distribution of the point with a mean value of 952 MPa is shown in Figure 9. As expected, a wide range and a non-Gaussian distribution of the responses from 894 MPa to 1020 MPa were derived. The response statistics of the projectile including mean, COV, minimum and maximum values are summarized in Table 1. Note that the acceleration and stress responses had higher COV of 3.1% and 3.0%, respectively. The second order derivatives exhibited equivalent COV level compared with the applied pressure. The displacement response showed a COV of 0.67%, a much smaller
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
82 Computational Ballistics III

Figure 7: Histogram of maximum axial velocity distribution.
Figure 8: Histogram of peak axial acceleration distribution.
Figure 9: Histogram of peak von Mises stress distribution at projectile body.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 83

Table 1: Response statistics of a 60-mm projectile subject to random excitations.
Response Mean Coefficient of Variation
Minimum Maximum
Peak velocity (mm/s) 1.55x106 0.80% 1.506x106 1.583x106 Peak acceleration (mm/s2)
8.38x108 3.1% 7.80x108 9.09x108
von Mises stress at projectile body (KPa)
9.52x105 3.0% 8.94x105 1.02x106
Travel Distance (mm)
3770 0.67% 3699 3847
variations as expected. The mean value of the travel distance was 3770 mm with a standard deviation of 25.3 mm. It implies that the time duration of the pressure curve should have been a bit longer than 4.7 ms for the projectile to reach the muzzle. Based on the simulated results, the likelihood to travel through the barrel within the time frame was less than 10%. The discrepancy was probably due to the slight difference in the total mass of the launch package used in computer modeling and IBHVG2. The relationships among responses were of interest as well in this study. Figure 10 provides the scatter plot of the peak acceleration against the von Mises stress responses. Overall speaking, a positive trend is seen from the plot. However, the level of correlation was not considerably high because the locations where the nodal acceleration and the element stress were obtained were not identical. Another scatter plot that represented the relationships between the maximum axial velocity and the travel distance is given in Figure 11. As anticipated, the data demonstrated a very strong correlation. The relationships should help derive required muzzle velocity given a certain length of gun barrel. It should be noted that having scatter plots between random variables and responses are not very meaningful because the 47 random variables were not completely independent in terms of their contributions to the total responses. No clear pattern was found between any instant pressure variable and any of the projectile responses.
5 Summary
A pressure-time curve that consisted of 47 data points was adopted for the stochastic study. The pressure at each data point was considered as a normally distributed variable. The variations of the pressure were used to account for the uncertainties from a number of inherently uncontrollable factors that are associated with propulsion thrust generation. A slight 3% coefficient of variations for each random variable was employed to support the evidence that the dispersion of in-bore projectile responses exists in daily experimental shooting even with the same gun, the same cartridge and the same projectile system.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
84 Computational Ballistics III

Figure 10: Scatter plot of von Mises stress vs. maximum acceleration.
Figure 11: Scatter plot of maximum axial velocity vs. total travel distance.
A deterministic 60-mm projectile system and a 64-cal smooth bored gun were used. The composite projectile system was simplified in the nose and fin areas in order to increase computational efficiency. A total of 100 distinctive pressure curves that consisted of 47 Gaussian variables were created based on Monte Carlo simulation techniques. The corresponding in-bore projectile responses to each pressure sample were then obtained. Given 95% likelihood, the highest in-bore velocity should fall into the range from 1526 m/s to 1575 m/s, the peak acceleration from 80170 g to 90735 g, the maximum von Mises stress of the projectile body from 894 MPa to 1009 MPa. The variations should serve as a guideline for the design of the 60-mm gun-projectile system. In addition, the computed response ranges should be anticipated from experimental results even under regular shooting environment.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 85

Acknowledgement
The author would like to thank Dr. Lang-Mann Chang, a retiree from the Propulsion Science Branch of the US Army Research Laboratory for his valuable advice on the physics of gun propellant combustion.
References
[1] R. Anderson & K. Fickie, IBHVG2 (Interior Ballistics of High Velocity Guns, Version 2) – A user’s guide, Technical Report BRL-TR-2829, US Army Research Laboratory, Aberdeen Proving Ground, MD, July 1987.
[2] P.S. Gough, The XNOVAKTC code, Contractor Report BRL-CR-627, US Army Research Laboratory, Aberdeen Proving Ground, MD, February 1990.
[3] C. Ruth & T. Minor, Experimental study of flame spreading processes in 155-mm, XM 216 modular propelling charges, Memorandum Report BRL-MR-3840, US Army Research Laboratory, Aberdeen Proving Ground, MD, June 1990.
[4] P.S. Gough, Initial development of the core module of next generation model NGEN, Contractor Report ARL-CR-234, US Army Research Laboratory, Aberdeen Proving Ground, MD, June 1995.
[5] M. Nusca, High-performance computing and simulation for advanced armament propulsion, Technical Report ARL-TR-3215, US Army Research Laboratory, Aberdeen Proving Ground, MD, June 2004.
[6] M. Nusca, A. Horst & J. Newill, Multidimensional, two phase simulations of national telescoped ammunition propelling charge, Technical Report ARL-TR-3306, US Army Research Laboratory, Aberdeen Proving Ground, MD, September 2004.
[7] M. Chen, Structural Design and Analysis of Hit-to-Kill Projectile, 9th International LS-DYNA Users Conference, Dearborn, Michigan, USA, Session 2, 13-22 (2006)
[8] L.-M. Chang, Personal communication, 2 August 2006, Propulsion Science Branch, Army Research Laboratory, USA.
[9] Help Manual of HyperStudy 7.0, Altair Engineering Inc. (2005)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
86 Computational Ballistics III

Section 3 Terminal ballistics

This page intentionally left blank

On the linkage of impact damage to modeling of ballistic performance
J. M. Wells
Abstract
The assessment of terminal ballistic performance has historically been strongly biased toward the penetration resistance of the target architecture and its component materials. However, penetration modeling alone does not provide sufficient knowledge to create new and/or improved armor ceramics materials capable of mitigating and preventing penetration. It is apparent that physical impact damage occurs prior to, and strongly affects, the occurrence and progress of the penetration process and as such impact damage needs to be explicitly included in ballistic performance modeling. One aspect of this situation has been the difficulty in attaining a detailed volumetric characterization of actual sub-surface bulk impact damage. The x-ray computed tomography, XCT, diagnostic and 3D visualization techniques presently appear as the only effective nondestructive evaluation, NDE, modality for high resolution volumetric impact damage interrogation, spatial characterization, quantification, visualization, and 3D analysis. An overview of the current XCT impact damage diagnostic capabilities and results are discussed along with some remaining challenges and the need to incorporate 3D physical damage features into future computational models for predictive ballistic performance. Keywords: X-ray Computed Tomography, XCT, damage diagnostics, ballistic impact damage, computational modelling, terminal ballistics, NDE, cracking, embedded fragments, impact-induced porosity.
1 Introduction
The historical focus of ballistic computational modeling on the penetration phenomenon is understandable and logical in that no friendly armor system should be penetrated. However, penetration-only based models lack the
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 89
doi:10.2495/CBAL070081
JMW Associates, Mashpee, MA, USA

capability to provide the essential insight into extrinsic target architectural or intrinsic material modifications required for the design of vastly improved ceramic armor systems. Penetration models generally use a 2D axisymmetric geometry approach which has proven computationally tractable and successful in creating accurate penetration simulations. The measurement of penetration parameters is relatively straight forward and hence the validation and verification of penetration-only models is quite possible. Conversely, comparatively little progress has been made in developing physical damage-based computational models that accurately describe real ballistic impact damage.
It is apparent that physical impact damage occurs prior to, and likely affects, the occurrence and progress of the penetration process and as such needs to be explicitly included in ballistic performance modeling [1]. Impact damage has received renewed attention over the past decade with the evolution and application of non-invasive industrial x-ray computed tomography, XCT, damage diagnostic and 3D voxel visualization techniques. XCT presently appears as the only effective NDE modality for high resolution volumetric ballistic impact damage interrogation, spatial characterization, quantification, visualization, and 3D analysis and has been successfully demonstrated on armor ceramics [1-8] and Ti-6Al-4V monolithic metallic armor materials [9]. Its inclusion in predictive ballistic impact damage modeling [1,6] has been proposed.
2 Background
The traditional “post-mortem” method of examining ballistic damage within the interior of impacted opaque ceramic targets has been destructive metallographic sectioning, polishing, and optical and electron microscopy. While permitting damage observations at multiple length scales, this method is irreversible and is essentially limited to observations on individual 2-D planar sections. Traditional non-destructive examination, NDE, modalities such as digital x-ray and ultrasound are currently more capable of damage “detection” than they are of the detailed characterization of defect size, morphology, volumetric location, and the discrimination between multiple damage variants which are superimposed in a complex assemblage. Thus an essential need exists for a diagnostic in-situ approach which can provide the qualitative and quantitative characterization details of actual impact-induced damage. The most satisfactory “post-mortem” solution demonstrated to fulfil this need to date is industrial x-ray computed tomography, XCT. Yet, other than the work of the author and/or his collaborators [1-9], no other published application of this approach for ceramic impact damage diagnostics is known.
3 XCT impact damage results
3.1 Impact damage
There is no universally agreed upon definition of impact damage in terminal ballistics testing of armor ceramics. Most of the post-mortem studies using
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
90 Computational Ballistics III

destructive metallographic sectioning focus their description of impact damage on traditional types of radial, ring, conical, and laminar cracking. These observations are made on a limited number of 2D planar sections and do not provide a full spatial characterization of these cracking types. Computational ballistic models such as the Johnson-Holmquist [10] model invoke a less physically descriptive, yet more mathematically convenient damage definition by relating cumulative inelastic strain to a normalized “damage function” which ranges from a value of 0 for no damage up to the fully damaged condition with a value of 1.0. The use of this simplistic damage definition has worked reasonably well for the computational model of the penetration phenomenon. Such mathematically unsophisticated definitions of impact damage do not incorporate the distinct differences in the various details of actual ballistic impact damage. Granted the inclusion of such realistic details of the actual physical impact damage is a most difficult computational modeling challenge. However, the author considers it ultimately necessary to achieve a computational methodology which more closely incorporates critical aspects of real impact damage features.
3.2 The XCT approach to impact damage diagnostics
XCT is a powerful and functional 3D NDE diagnostic modality which allows the in-situ interrogation of the external and internal design surfaces and/or damage features within the bulk of the original object. The triangulation of volumetric x-ray absorption data is utilized to construct a completely digitized “density” map of a solid object thus accurately representing the dimensional and structural features of that object. Resolution levels achievable with XCT are a function of both the object’s size and density, and the x-ray source and detector system. The nominal resolution level for the meso-scale tomography of a modest size medium density laboratory ballistic target is < 0.250 mm. Higher micro-tomography resolution levels of < 20 microns are achievable only on relatively less dense and/or smaller objects. If higher resolution levels are still required, then destructive sectioning and electron microscopy techniques may augment the results of XCT. After digitization of the physical target by XCT scanning, subsequent interrogations of the impacted target are then conducted in the virtual diagnostic domain. The original XCT scan data file is reconstructed into a virtual 3D solid object using an advanced voxel analysis and visualization software package [11]. Several sophisticated image processing tools and routines are then used to obtain the XCT diagnostic results that contribute to the enhanced understanding of various physical impact damage details. The XCT diagnostic results are reproducible, accessible, and amenable to digital archival file storage.
3.2.1 Impact damage observations in TiB2 An earlier ballistic experiment conducted in 1996 at the US Army Research Laboratory involved a target of a short cylindrical TiB2 ceramic measuring 72 mm in diameter by 25 mm in thickness [2,4]. Examples of some of the XCT diagnostic results obtained on this sample are shown in figures 1 to 4. Various impact surface and near-surface impact damage feature observations are shown in figure 1. Perhaps the most dramatic damage features shown here are the three
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 91

distinct circular “steps” which surround the large impact cavity. These steps appear to be an agglomeration of intermixed debris from both the impacting projectile and the target ceramic. The height of these steps decreases from ~3.5 mm for the inner circular step to ~ 1.2 mm for the outermost step. Their grey levels directly reflect their density which was found to be intermediate between than that for the projectile and for the TiB2 ceramic. Figure 2 reveals a large tungsten alloy projectile fragment mass and the segmented cracking impact damage features observed in a virtually transparent 3D view.
Figure 1: Examples of surface and near surface damage features.
Figure 2: Segmented and virtual transparent views of a large projectile fragment mass and impact cracking.
Further investigation of the large embedded tungsten alloy projectile fragment revealed that it is not a homogeneous mass of projectile composition, but rather is a complex agglomeration of multiple small tungsten alloy fragments
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
92 Computational Ballistics III

intermixed with debris from both the ceramic rubble and fine rubble from the projectile. The intermixed debris is identified from its grey level (primarily a density indicator) found to be intermediate between that of the high density projectile material and the lower density of the host ceramic material. Also, the presence of impact-induce porosity was observed entrapped within the large agglomerated fragment mass. In figure 3 these features are observed in the virtual longitudinal section and the four axial slices taken at locations from above the exit face (A-20) to below the impact face (A-135).
TiB2 A-20
TiB2 A-50
TiB2 A-1003D Transparent ViewSegmented fragment
TiB2
A-20A-50
A-100
A-135
Half-section vertically Axial Section ViewsTiB2 A-20
TiB2 A-50TiB2 A-50
TiB2 A-100TiB2 A-1003D Transparent ViewSegmented fragment
TiB2
A-20A-50
A-100
A-135
3D Transparent ViewSegmented fragment
TiB2
3D Transparent ViewSegmented fragment
TiB2
A-20A-50
A-100
A-135
Half-section vertically Axial Section Views
Figure 3: Fragment details revealing the multiple smaller w-alloy fragments (white) with enclosed porosity and intermixed ceramic debris (darker grey areas).
Figure 4: Three separate impact damage modes in the axial slice image on the left; both spiral and “hourglass” shaped cracking morphology is evident on the image on the right.
Two additional and very revealing images of damage features are shown in figure 4. First, the image on the left is an axial slice (A-137) of the TiB2 target in which can be seen several small projectile fragments in the center of the sample.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 93

Also seen in this image are several significant voids (dark grey level) about the embedded fragments. Finally, one can distinguish four concentric circular cracks surrounding the central voids and fragments. These circular cracks are actually the intersections of 3D conical cracks with the axial plane of this image. The image on the right side of figure 4 shows a profile view of a virtually surfaced point cloud of the complex cracking morphology within the TiB2 ceramic. Two observations are made from this unique image: first that a spiral “thread-like” orientation of the cracking exists, and secondly that the cracking diameter is larger at both the impact and exit surfaces and narrows near the mid-thickness of the target. This narrowing “hourglass” shaped cracking profile likely results from the interaction of incident and reflective shock waves and demonstrates extremely complex cracking damage morphology.
3.2.2 Impact damage observations in Al2O3 Addition impacted ceramic targets examined include an Al2O3 target made available for XCT diagnostic study from the earlier work of D.A. Shockey et al. [12-14]. This target consisted of a half-cylindrical longitudinal section measuring approximately 100 mm in height by 102 mm in width. It has a large cavity on its impact surface and had been totally penetrated. Figure 5 includes virtual reconstructed images of this target revealing both the virtually segmented semi-continuous projectile fragments through the entire thickness of the target and the presence of an inhomogeneous distribution of impact-induced porosity in close proximity to the fragment segments. A further complexity of the fragment material is revealed in the virtual axial slices shown on the left hand side of figure 6. As observed in the smaller TiB2 target above, the inner structure of the large fragment sections consists of multiple smaller tungsten alloy fragments (whitest grey levels) and intermixed debris of ceramic and projectile fine rubble.
Figure 5: XCT virtual images showing segmented projectile fragments and adjacent impact-induced porosity.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
94 Computational Ballistics III

Figure 6: The complex inner-structure of the large fragment is revealed in the
five designated virtual axial slices as shown on the left.
Figure 7: Frontal view of the B4C ceramic target reveals several manifestations of impact damage.
3.2.3 Impact damage observations in B4C Another impacted ceramic target sample made available from the work of Shockey et al. [12-14] was a longitudinally sectioned half-cylindrical target of B4C ceramic measuring approximately 113 mm in height by 103 mm in width. This target has a modest sized cavity on its impact surface and had also been fully penetrated by the high energy kinetic energy projectile. Several damage features are observed on the virtual rendered frontal section shown in figure 7 including multiple high density (bright white) projectile fragments, medium grey
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 95

intermixed areas of B4C ceramic and finer tungsten alloy debris, and enclosed porosity (fully dark grey level). Impact-induced cracking, although in somewhat low contrast, is also observed. The large dark horizontal bands appearing in figure 7 occur at the identical heights as the larger high density fragments and are considered artifacts created in the original scanning process. With the application of the virtual transparency image processing technique, the opacity of the B4C ceramic is adjusted to zero and embedded fragment sections are observed discontinuously through the thickness of the target. Also, with the defect analysis tool, the presence of localized impact-induced porosity is seen adjacent to all major projectile fragments as shown in figure 8.
Figure 8: Oblique 3D images show segmented projectile fragments from the impact to the exit face. Images on the right show localized porosity adjacent to fragments.
3.3 Discussion of observed impact damage features
With the information developed from the above three impacted ceramic targets samples, as well as from additional targets examined by the author but not described herein, several somewhat revealing impact damage observations can be made as follows:
a. Several types of physical ballistic impact damage occur in terminal ballistic ceramic targets, including complex cracking morphologies, impact-induced voids and porosity, and multiple embedded tungsten alloy projectile fragments smaller than first apparent.
b. Additional mesoscale cracking morphologies beyond the traditionally reported ring, radial, conical, and laminar cracking types have been observed as spiral cracking, and with multiple superimposed 3D hourglass-shaped cracking. Such 3D cracking morphologies are generally asymmetric and are not unrelated to traditional cracking forms normally viewed in 2D. Some limited success has been achieved to date with the segmentation of ensemble cracking morphologies. Fragmentation of the ceramic targets is observed but in-situ metrology of the ceramic fragments has yet to be obtained.
c. Embedded residual projectile fragments have been segmented and observed in isolation from the opacity of the surrounding host ceramic. Such embedded fragments are observed to have an inner structure
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
96 Computational Ballistics III

considerably more complex than simply a monotonic tungsten alloy only segment. In addition to multiple smaller constituent projectile fragments, a surrounding volume of intermixed fine debris consisting of both ceramic and projectile rubble is frequently observed. Porosity is often found within the intermixed fragment masses. Such features can be segmented and in-situ size metrology provides dimensions, surface area, and volume of designated fragment masses.
d. Impact-induced porosity is observed in many instances adjacent to fragment masses along the center line of the projectile path. There is a considerable size scale distribution to this porosity and it is generally inhomogeneous throughout the bulk of the target ceramic. Similar porosity is observed along cracking boundaries as well. The size and location of individual pores are obtainable with XCT diagnostics as well as the spatial and statistical distribution of pore sizes.
e. Initial developments in the quantification and 3D mapping of the local damage fraction has been successful for the case of axisymmetric damage [4]. However, the observed damage features are generally asymmetrical, and further development work is needed for the 3D asymmetrical mapping of impact damage features. Also, the process of creating the 3D mapping of the impact damage needs to be simplified and its construction accelerated.
4 Summary
XCT diagnostics were demonstrated to provide unprecedented results of the in-situ characterization and visualization of complex ballistic impact damage features. Future developments and refinements of this technology are realistically anticipated. The need exists for this damage diagnostics technology to be integrated into future damage-based computational modeling efforts. The most feasible way for this to occur is to establish collaborative interchanges between the practitioners of both disciplines. Such collaborations can maximize the functionality of both the content and the format of impact damage diagnostic knowledge and accelerate its incorporation into more realistic predictive models.
Acknowledgements
Acknowledgements are gratefully extended to W.H. Green of ARL for the XCT scans, Dr. D. A. Shockey of SRI for making the Al2O3 and B4C targets available, and Dr. C. Reinhart of Volume Graphics GmbH for assistance with the StudioMax v.1.2.1 voxel analysis and visualization software.
References
[1] J.M. Wells, On the Role of Impact Damage in Armor Ceramic Performance. Proc. of 30th Int. Conf. on Advanced Ceramics & Composites-Advances in Ceramic Armor, (2006), (In Press)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 97

[2] J.M. Wells, Progress in the Nondestructive Analysis of Impact Damage in TiB2 Armor Ceramics. Proc. of 30th International Conf. on Advanced Ceramics & Composites-Advances in Ceramic Armor, 2006, (In Press)
[3] J. M. Wells, Progress on the NDE Characterization of Impact Damage in Armor Materials. Proc. of 22nd Int. Ballistics Symp., ADPA, v2, pp. 793-800, 2005.
[4] H.T. Miller, W.H. Green, N. L. Rupert, and J.M. Wells, Quantitative Evaluation of Damage and Residual Penetrator Material in Impacted TiB2 Targets Using X-Ray Computed Tomography. 21st Int. Symp. on Ballistics, Adelaide, Au, ADPA, v1, pp. 153-159, 2004.
[5] J. M. Wells, N. L. Rupert, and W. H. Green, Progress in the 3-D Visualization of Interior Ballistic Damage in Armor Ceramics. Ceramic Armor Materials by Design, Ed. J.W. McCauley et al., Ceramic Transactions, v134, ACERS, pp. 441-448, 2002.
[6] J.M. Wells, On Incorporating XCT into Predictive Ballistic Impact Damage Modeling. Proc. of 22nd Int. Ballistics Symp., ADPA, v2, pp. 1223-1230, 2005.
[7] J.M. Wells, On Continuing the Evolution of XCT Engineering Capabilities for Impact Damage Diagnostics, Proc. 31st Intn’l Conf. on Advanced Ceramics & Composites, ACERS, 2007, In Press.
[8] J.M. Wells, N.L. Rupert, W.J. Bruchey, and D.A. Shockey, XCT Diagnostic Evaluation of Ballistic Impact Damage in Confined Ceramic Targets. 23rd
Intn’l Symp. on Ballistics, Tarragona, Spain, ADPA v2, 2007, In Press
[9] J.M. Wells, W.H. Green, N.L. Rupert, J. R. Wheeler, S.J. Cimpoeru, and A.V. Zibarov, Ballistic Damage Visualization & Quantification in Monolithic Ti-6Al-4V with X-ray Computed Tomography. 21st Int. Symp. on Ballistics, DSTO, Adelaide, Australia, ADPA 1, pp. 125-131, 2004.
[10] T.J. Holmquist and G.R. Johnson, Modeling Prestressed Ceramic and its Effect on Ballistic Performance. Int. Jnl. of Impact Eng’g, 31, pp. 113-127, 2005.
[11] Volume Graphics StudioMax v1.2.1, www.volumegraphics.com [12] D.A. Shockey, A.H. Marchand, S.R. Skaggs, G.E. Cort, M.W. Burkett and
R. Parker, Failure Phenomenology of Confined Ceramic Targets and Impacting Rods. Int. Jnl of Impact Eng’g, 9 (3), pp. 263-275, 1990.
[13] D.A. Shockey, D.R. Curran, R.W. Klopp, L. Seaman, C.H. Kanazawa, and J.T. McGinn. Characterizing and Modeling Penetration of Ceramic Armor. ARO Report No. 30488-3-MS, 1995.
[14] D.A. Shockey, A.H. Marchand, S.R. Skaggs, G.E. Cort, M.W. Burkett and R. Parker, Failure Phenomenology of Confined Ceramic Targets and Impacting Rods, Ceramic Armor Materials by Design, Ed. J.W. McCauley et al., Ceramic Transactions, v134, ACERS, pp. 385-402 2002.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
98 Computational Ballistics III

A method to increase the tip velocity of a shaped charge jet using a hollow cavity
D. R. Scheffler & W. P. Walters U.S. Army Research Laboratory, Weapons and Materials Research Directorate, USA
Abstract
A technique is presented to increase the tip velocity of a conventional shaped charge (SC) device by employing an air cavity wave shaper which overlaps the liner. Thus, the device is a combination of an SC and an air cavity charge. Two-dimensional, axisymmetric CTH simulations were used to design the warhead. CTH is a family of computer programs developed at Sandia National Laboratories for modeling solid dynamics problems involving shock-wave propagation, multiple materials, and large deformations in one, two, or three dimensions. The baseline case was a standard 7.5-cm-diameter liner. The liner is basically a 42° copper, conical liner with a tip velocity of 8 km/s. The air cavity, which overlaps the liner, increases the tip velocity of the coherent portion of the liner to about 10 km/s, with hypervelocity jet particles traveling in front of the tip with a velocity of about 14 km/s. Keywords: shaped charge jet, wave shaper, numerical simulation, hydrocode, explosive, cavity.
1 Introduction
Currently used shaped charge (SC) designs (i.e., in weapon systems, oil-well completion, or drilling operations) may be designed to provide a deep hole in a target material and maximize crater volume. Increasing the tip velocity of the jet increases the depth of penetration into many targets, including most metals and geological materials. The depth of penetration is critical for most military targets and for releasing the flow of gas or oil in the oil-well completion problem. SC performance, i.e., depth of penetration, may also be improved by using a wave shaper. A wave shaper is a device that can contour or shape the detonation
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 99
doi:10.2495/CBAL070091

wave, causing it to impact the liner at a more favorable angle, namely nearly normal or perpendicular to the liner. Wave shapers can thus be used to alter the impact angle of the detonation wave to improve performance of the SC. They can also be used to decrease the amount of explosive required to form a fast jet. Wave shapers have been made of many materials, including metals, plastics, concrete, and air. Usually, the intent is to contour the detonation wave to move around the wave shaper to impact the liner at a favorable angle. Here, a hollow wave-shaper concept is examined where the hollow volume overlaps the apex of the SC liner. The goal is to produce low-mass, high-velocity particles to simulate micrometeorite particles which may impact spacecrafts. A series of five hydrocode simulations are presented, where one simulation is a baseline SC without a hollow cavity to which all other simulations are compared. The SC concept that uses a hollow cavity overlapping the apex of the SC liner is further detailed in Walters and Scheffler [1]. The simulations were performed using the CTH hydrocode [2], a state-of-the-art, second-order accurate, Eulerian hydrocode developed by Sandia National Laboratories. This code, which is capable of solving complex problems in shock physics in one, two, or three dimensions, provides several constitutive models, including an elastic-perfectly plastic model with provisions for work hardening and thermal softening, the Johnson–Cook model [3], the Zerrilli–Armstrong model [4], the Steinberg–Guinan–Lund model [5,6], an undocumented power-law model, and others. High-explosive detonation can be modeled using the programmed burn model, the Chapman–Jouguet volume burn models, or the history variable reactive burn model [7]. Several equation-of-state (EOS) options are available, including tabular (i.e., SESAME), analytical (ANEOS), Mie-Grüneisen, and Jones–Wilkins–Lee (JWL) [8]. Material failure occurs when a threshold value of tensile stress or hydrostatic pressure is exceeded. In addition, the Johnson–Cook failure model [9] is also available. When failure occurs in a cell, void is introduced until the stress state of the cell is reduced to zero. Recompression is permitted. To reduce the diffusion typically encountered in Eulerian simulations, several advanced material interface tracking algorithms are provided, including the high-resolution interface tracking algorithm (available for two-dimensional [2-D] simulations only), the simple line interface calculation algorithm [10], and the Sandia-modified Youngs’ reconstruction algorithm [11].
2 Simulation setup
A series of five 2-D simulations using the March 1999 version of the CTH hydrocode were performed using cylindrical symmetry for each of the SC geometries shown in Figures 1–5. Figure 1 shows the baseline SC. The baseline SC consists of a copper liner that has an apex angle of 42°, a liner thickness of 0.225 cm, and a base diameter of 7.5 cm. The SC liner had a mass of 232 g. The unconfined explosive was 78/22 Octol; the JWL EOS was used. Explosive detonation was accomplished using a simple programmed burn model and point initiated at the rear of the SC.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
100 Computational Ballistics III

All simulations employed axisymmetry and used the same computational mesh. The mesh consisted of 207 × 2163 cells, with the origin of the coordinate system at the base of the SC liner. A constant grid of purely square cells, with a cell size of 0.0241 × 0.0241 cm, was used. Simulations were carried out until the lead jet particles left the computational mesh.
3 Simulation results
Figure 6 shows the shaped charge jet (SCJ) for the baseline case. At 60 µs, the SCJ is still coherent and has a typical shape for a jet before it particulates. The left side of Figure 6 is a pressure plot showing only compression, and the right side is a material plot showing only the jet material (the explosive material has been discarded from the simulation at an earlier time). The axial velocity profile is shown in Figure 7. Figure 7 shows the tip of the SCJ travelling at approximately 8 km/s. Also examined was the maximum axial pressure experienced by the SCJ, as seen in Figure 8. Figure 8 shows the maximum pressure of 85 GPa at 20 µs. (It should be noted the axial pressure plots were examined at 1-µs intervals and that the actual peak pressure may have been missed.) The SCJ tip velocity and maximum pressure are used for comparing the remaining examined charges. It was postulated that the high pressure in the air cavity resulted in the higher jet tip velocity.
Figure 1: Baseline SC configuration.
Figure 2: Case 1: SC with baseline cavity overlapping liner.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 101

Figure 3: Case 2: SC with cavity wave shaper, no overlap.
Figure 4: Case 3: SC with reduced and modified cavity overlapping liner.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
102 Computational Ballistics III

Figure 5: Case 4: SC with modified baseline cavity overlapping liner.
Figure 6: Baseline SC at 60 µs.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 103

Figure 7: Axial velocity for baseline SC at 60 µs.
Figure 8: Axial pressure for baseline SC at 20 µs.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
104 Computational Ballistics III

Figure 9 shows the geometry and pressure plot for the Case 1 SCJ at 40 µs, as shown in Figure 2. Case 1 shows the wave shaper cavity overlapping the SC liner. Unlike the baseline SC, Figure 9 shows a coherent SCJ, with hypervelocity particles ahead of the main jet tip. The axial velocity profile of the SCJ, shown in Figure 10, shows that the tip velocity is approximately 10 km/s, with the leading hypervelocity particles travelling much faster. The maximum velocity of the lead particle is approximately 14 km/s. Figure 11 shows the axial pressure profile along the jet at 12 µs, the time when maximum pressure was observed. The maximum pressure was approximately 185 GPa. All other SC cases with wave shapers, whether the hollow cavity overlaps the apex of the SCJ liner or not, had similar jet profiles to that shown in Figure 9. Due to page limitations, the results of all cases are simply summarized in Table 1.
Figure 9: Case 1 SC at 40 µs.
The Case 2 SC, Figure 3, does not have a cavity that overlaps the apex of the copper liner. Rather, the conical cavity’s apex meets at the liner’s apex. From Table 1, the Case 2 SCJ gives a slightly higher SCJ tip velocity than the baseline case, namely 8.7 km/s. Though the cavity of Case 2 did not overlap the copper liner, it still produced hypervelocity particles similar to those shown for Case 1 in Figure 9. The approximate maximum particle velocity was 12 km/s. The maximum pressure seen for the Case 2 SCJ along its axis occurred at 9 µs and was 135 GPa. While this charge represented an improvement in performance over the baseline SC, it used more explosive than Case 1 and did not match the Case 1 SC performance.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 105

Figure 10: Axial velocity for Case 1 SC at 40 µs.
Figure 11: Axial pressure for Case 1 SC at 12 µs.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
106 Computational Ballistics III

Table 1: Comparison of simulation results.
Case # Charge Mass
(g)
Max. Particle Velocity (km/s)
Jet Tip Velocity (km/s)
Max. Pressure & Time at Max.
(GPA @ µs) Baseline 1406 N/A 8.0 85 @ 20
1 1363 14.0 10.0 185 @ 12
2 1392 12.0 8.7 135 @ 9
3 1373 11.2 8.7 165 @ 10
4 1340 12.5 8.9 115 @ 11
N/A = not applicable. For the Case 3 SC, the cavity again overlaps the apex of the liner and has additional explosive removed along the liner, as shown in Figure 4. This represents a reduced and modified cavity from Case 1 as shown in Figure 2, and thus has more explosive mass than Case 1 (see Table 1). From Table 1, it can be seen that while the velocity-based performance, maximum hypervelocity particle velocity, and pressure does not match the performance of Case 1, it nevertheless represents an improvement over the baseline SC. The jet tip velocity was the same as Case 2, which did not overlap the liner apex; however, the maximum hypervelocity particle velocity was less, about 11.2 km/s compared to 12 km/s. For Case 4, Case 1 (Figure 2) was modified by removing explosive material along the liner, as shown in Figure 5. Of all the SCs examined, Case 4 used the least amount of explosive mass, about 1340 g, as listed in Table 1. The Case 4 SC was the second best in performance when measured in terms of maximum particle velocity, jet tip velocity, and maximum pressure. It was exceeded only by Case 1. However, probably none of the cases studied represented the optimal air cavity shape.
4 Conclusions
The results of five axisymmetric simulations were presented. The first simulation represented a standard SC without a hollow wave shaper. The second simulation, Case 1, represented the baseline hollow wave shaper cavity which overlaps the apex of the SC liner. While wave shapers, including hollow cavities, have been in use for some time, it was shown that by using a hollow cavity overlapping the apex of the liner, improvement in SCJ performance, as measured in terms of jet tip velocity, could be obtained. The generation of higher velocity particles preceding the jet tip could also be obtained. The expansion of the overlapping cavity by removing explosive along the side of the liner showed no real advantage.
References
[1] Walters, W.P. & Scheffler, D.R., Shaped charge explosive device and method of making the same. Patent 6,983,698, 2006.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 107

[2] McGlaun, J.M., Thompson, S.L. & Elrick, M.G., CTH: a three-dimensional shock wave physics code. International Journal of Impact Engineering, 10(1-4), pp. 351-360, 1990.
[3] Johnson, G.R. & Cook, W.H., A constitutive model and data for metals subjected to large strains, high strain rates and high temperatures. Proc. of the 7th Int. Symp. on Ballistics, The Hague, The Netherlands, pp. 541-548, 1983.
[4] Zerilli, F.J. & Armstrong, R.W. Dislocation-mechanics-based constitutive relations for material dynamics calculations. Journal of Applied Physics, 61(5), pp. 1816-1825, 1987.
[5] Steinberg, D.J., Cochran, S.G. & Guinan, M.W., A constitutive model for metals applicable at high-strain rate. Journal of Applied Physics, 51(3), pp. 1498-1504, 1980.
[6] Steinberg, D.J. & Lund, C.M., A constitutive model for strain rates from 10-4 to 106 s-1. Journal of Applied Physics, 65(4), pp. 1528-1533, 1989.
[7] Kerley, G.I., CTH equation of state package: porosity and reactive burn models. SAND92-0553, Sandia National Laboratories, Albuquerque, NM, 1992.
[8] Lee, E.L., Hornig, H.C. & Kury, J.W., Adiabatic expansion of high explosive detonation products. UCRL-50422, Lawrence Livermore National Laboratory, Livermore, CA, 1968.
[9] Johnson, G.R. & Cook, W.H., Fracture characteristics of three metals subjected to various strains, strain rates, temperatures, and pressures. Journal of Engineering Fracture Mechanics, 21(1), pp. 31-48, 1985.
[10] Noh, W.F. & Woodward, P., SLIC (simple line interface calculation). Lecture Notes in Physics, 59, Springer-Verlag, 1976.
[11] Bell, R.L. & Hertel Jr., E.S., An improved material interface reconstruction algorithm for eulerian codes. SAND92-1716, Sandia National Laboratories, Albuquerque, NM, 1992.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
108 Computational Ballistics III

A computational viscoelasticity/damage/plasticity model for high-explosive materials
P. Rangaswamy & R. M. Hackett Los Alamos National Laboratory, Los Alamos, New Mexico, USA
Abstract
It is important to be able to accurately predict the behavior of high-explosive (HE) materials because of the sensitivity with which they respond in the environment in which they are designed to perform, and because they are also extremely sensitive to accidental mechanical shock, which might occur during handling. Thus it is imperative that a capability exists to develop a constitutive material model and simulate the response of HE materials subjected to a variety of thermomechanical loading conditions, a response that is characterized as highly complex. It has been demonstrated through uniaxial strain-rate experiments conducted at the Los Alamos National Laboratory (LANL) that the initial response of HE material is rate-dependent, with the growth of microcracks continuing under load until the yield strength is reached. In a material such as this, the initial stages of deformation involve both elastic and viscous mechanisms. It has been postulated that this observed behavior could be categorized as nonlinear viscoelasticity, coupled with continuing microcracking. A computational material model containing viscoelasticity, internal damage accumulation and rate-dependent plasticity has been formulated for the purpose of simulating the behavior of these types of material systems. The formulation has been incorporated as a user-defined material (UMAT) into the ABAQUS finite element code. It is demonstrated in this paper how the material model can be employed by calibrating it to the experimental response of the material Mock 900-21, a high-explosive material mock utilized at LANL. Keywords: computational, viscoelasticity, damage, fracture mechanics, plasticity, user material model.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 109
doi:10.2495/CBAL070101

1 Introduction
It is important to be able to accurately predict the behavior of HE materials because of the sensitivity with which they respond in the environment in which they are designed to perform, and because they are also extremely sensitive to accidental mechanical shock, which might occur during handling. Thus it is imperative that a capability exist to model the response of HE materials subjected to a variety of thermo mechanical loading conditions, a response that is highly complex, requiring sophisticated material modeling to simulate. It has been demonstrated through uniaxial strain-rate testing conducted at LANL that the initial response of HE material, along with the yield strength, is rate-dependent, with the growth of microcracks continuing under load until the yield strength is reached. In a material such as this, the initial stages of deformation involve both elastic and viscous mechanisms and are truly viscoelastic. It has been postulated that this observed behavior could be categorized as nonlinear viscoelasticity, coupled with continuing microcracking. However, since it is extremely difficult to obtain experimental data to support current nonlinear viscoelasticity theory, and since internal damage accumulation modeling has been successfully employed in numerous circumstances in lieu of nonlinear viscoelasticity modeling [1], a linear viscoelasticity/damage approach has been taken here in modeling the behavior of the HE material. Also, since certain HE materials have been observed to exhibit flow characteristics subsequent to reaching the damage-controlled yield stress, an applicable plasticity theory is presented and developed. The theory presented herein is used to develop a UMAT subroutine for the ABAQUS implicit finite element code. Mock materials are developed to simulate the laboratory response of HE materials because the mock materials can be conventionally tested whereas the HE materials usually cannot be. The developed UMAT is calibrated for Mock 900-21, a mock material for the high-explosive material PBX 9501, and uniaxial tests performed on Mock 900-21 are simulated. The calibrations are described in detail and simulation results are compared with test results.
2 Model formulation
The time dependence of microcrack growth in polymeric materials has been studied extensively, both theoretically and experimentally, for quite some time. The linear viscoelasticity/damage formulation presented here is based primarily upon the work of Addessio and Johnson [2]. During deformation, the distribution of microcracks in the material is assumed to be random, with the initial distribution being exponential.
2.1 Linear viscoelasticity/damage
Using Cartesian tensor index notation, strain is given by the kinematic relationship
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
110 Computational Ballistics III

)(21
,, jiijij uu +=ε , 3,2,1, =ji (1)
where the iu are the material deformation variables. It can be decomposed into deviatoric and mean components
ijmijij e δεε += (2)
where ijδ is the Kronecker delta; the mean strain is defined by
iim εε31
= (3)
The stress can likewise be decomposed into deviatoric and mean components ijmijij s δσσ += (4)
where the mean stress is defined by
iim σσ31
= (5)
and is related to the mean strain through the expression mm Kεσ 3= (6)
where K is the bulk modulus of the material. In a deviatoric Maxwell model, a single spring and dashpot in series, the relationship between stress and strain is
eijij Ges 2= (7)
where G is the shear modulus, and the relationship between stress and viscous strain rate is
vijij es η2= (8)
where η is the viscosity of the dashpot and where the dot over the variable indicates the time rate of change of the variable. Taking the partial derivative of Equation (7) and combining the result with Equation (8), i.e. adding elastic and viscous strain rates, gives
τ
ijveijij
seGs −= 2 (9)
where the relaxation time τ is given by
Gητ = (10)
For the viscoelastic solid, represented by a generalized deviatoric Maxwell model, with the strain being common for all elements of the model and the stresses for the individual elements being additive, i.e.
∑=
=N
n
nijij ss
1
)( (11)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 111

where N is the number of elements in the generalized Maxwell model and )(n
ijs is the deviatoric stress component for the n th element, the relationship between the deviatoric stress rate and the viscoelastic deviatoric strain rate and the deviatoric stress, referring to Equation (9), is given by
)2( )(
)(
1
)(n
nijve
ij
N
n
nij
seGs
τ−=∑
=
(12)
where )(nG and )(nτ are the shear modulus and relaxation time, respectively, for the nth Maxwell element. The cracking deviatoric strain versus deviatoric stress relationship, see Addessio and Johnson [2], is
ijcrij sce 3β= (13)
where c is the value of the average microcrack radius and β is a parameter that relates the shear modulus to the initial flaw size through the expression
32
1Ga
=β (14)
where a is the limiting crack size and
∑=
=N
n
nGG1
)( (15)
Combining Equations (13) and (14) yields a relationship between the deviatoric strain and the average crack radius
ij
crij s
acGe
3
2
= (16)
Taking the partial derivative of Equation (16) with respect to time gives the expression
ijijcrij s
acs
ac
aceG
32
32
+
= (17)
The total deviatoric strain, the sum of the viscoelastic deviatoric strain and the cracking deviatoric strain, is given by
crij
veijij eee += (18)
Combining Equations (12), (17) and (18) gives an expression for the deviatoric stress in terms of combined viscoelastic and microcracking response:
)( ijijijij ses λθψ +−= (19) where
3)/(1
2ac
G+
=ψ (20)
3
2
)/(1)/()/(3
acacac
+=θ (21)
and
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
112 Computational Ballistics III

)/()/(3
/2
1)()(
acacsN
nnn
ijij∑ ==
τλ (22)
The expression for the deviatoric stress rate for the nth Maxwell element is given by
+
−−= ijij
n
n
nij
ijnn
ij sacs
ac
ac
GGs
eGs32)(
)(
)()()( 32
τ (23)
2.2 Fracture mechanics
The application of fracture mechanics to time-dependent materials is relatively new [3]. An evolution equation defining crack growth rate is required. Consistent with traditional fracture-mechanics reasoning, and following the observations and conclusions of Dienes [4], it is assumed that the growth rate of the average crack radius is functionally dependent upon the stress intensity. The equations below are from Dienes [5] and Dienes and Kershner [6], with modifications for tension and friction provided by Johnson [7]. The cracking rate is either
m
Ires K
Kvc
=
1
, IK < K ′ (24)
or
−=
201I
res KK
vc µ , KKI ′≥ (25)
where
2/1
23
= ijijI sscK π , mσ < 0 (compression) (26)
or
2/1
23
= ijijI
cK σσπ , 0≥mσ (tension) (27)
and
2/1
021
+=′
mKK µ
(28)
mmKK
/1
1 21'
+= (29)
2/1
0
2/1
0
2/1
00'1'1
−−=
Kc
KcKK mm σµσπµ
µ (30)
s
s
µµ
µ2/1
2 )23(245'
−
= (31)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 113

where νres is the value of the rate of growth of the average crack radius Ko is the threshold value of stress intensity, m is a cracking parameter and µs is the static coefficient of friction. For the N-component Maxwell model, the viscous work rate is
∑∑==
==N
nnn
nij
nijve
ij
N
n
nij
ve
Gss
esw1
)()(
)()(
1
)(
2 τ (32)
and the cracking damage work rate is
== crijij
cr esw
+
ijijijij ssacss
ac
ac
G
32
321
(33)
Employing the constitutive model formulation presented, the incremental form of the equations, facilitating a computational solution, will be developed. Combining Equations (4), (6) and (19) yields the expression
ijijmmijij eK θλψεθεσθσ −++=+ )(3 (34) Rearranging Equation (34) somewhat yields the expression
xxxxVVxxxx KK θλεψεψεθσθσ −+
−+=+
3 (35)
for the global x-direction on a plane x = constant, with similar expressions for the y- and the z-direction, and
xyxyxyxy θλεψσθσ −=+2
(36) for the x-direction on the plane y = constant, with similar expressions for the y- and the z-direction, where
iiV εε = (37) The factor of 2 in the denominator in Equation (36) indicates that the strains are engineering. Applying the central difference operator to Equations (35) and (36) yields
txxxxVxxVxx KttKt )(32
12
1 λσεθεψεψθσθ−−∆+∆+∆
−
∆+=∆
∆+ (38)
and
txyxyxyxy tt )(22
1 λσθεψσθ+∆−∆=∆
∆+ (39)
where ∆ indicates incremental change, so that the Jacobian matrix D then has the terms
=)1,1(D)2/1(3
2t
Kxx
xx
∆++=
∆∂∆∂
θψ
εσ (40)
)2/1(3
)2,1(t
KDyy
xx
∆+−=
∆∂∆∂
=θψ
εσ ,etc. (41)
and
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
114 Computational Ballistics III

=)4,4(D)2/1(2 txy
xy
∆+=
∆∂
∆∂
θψ
σσ
, etc. (42)
crack growth. In a simulation of a uniaxial strain-rate test, the value of resv is changed until the yield stress of the simulation matches that of an actual test run at the same strain-rate. This procedure is repeated for a test run at a different rate of strain until a wide range of strain-rate tests have been covered. This results in a collection of say five data points, each of which relates a value of resv to a given value of strain-rate. A log-log plot of these data can usually be expected to yield a linear relationship between log ( resv ) and the log of the effective strain rate (for three-dimensionality) where the effective strain rate is given by
2/1222222 )](23)()()[(
)1(22
zxyzxyxxzzzzyyyyxxeff εεεεεεεεευ
ε +++−+−+−+
= (43)
where the strains are engineering and where υ , Poisson’s ratio, is given by
)2/1(32
)2/1(3
tK
tK
∆++
∆+−
=
θψθψ
υ (44)
2.3 Plasticity
Plasticity theory adaptable to computational modeling is generally well developed [8, 9]. An example of combining damage growth and plasticity is reported by Khaleel et al. [10], and the coupling of yield surface to damage is discussed by Johansson and Runesson [11]. The yield condition modeled herein is basically the flow rule of von Mises’ theory, the well-known Prandtl–Reuss relationship [12]. The effective plastic strain increment p
effε∆ is defined by
[ ] [ ] )( QDQH
DQW T
T
+= (45)
= zxyzxyzzyyxx
eff
ssssssQ ,,,2
,2
,2
3σ
(46)
2/1222222 )](6)()()[(22
zxyzxyxxzzzzyyyyxxeff σσσσσσσσσσ +++−+−+−= (47)
and where H is the hardening (or softening) modulus. The Prandtl–Reuss relationship states that plastic strain increments pε∆ result when the effective
plastic strain increment occurs under the state of stress Q , i.e.
peff
p Q εε ∆=∆ (48) The corresponding stress increments are obtained from the relationship
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 115

6.0
6.5
7.0
7.5
8.0
8.5
9.0
9.5
10.0
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5
1.0 sec-1
0.1 sec-1
0.01 sec-1
0.001 sec-1Log 10
Com
pres
sive
You
ng's
Mod
ulus
- Pa
Log10
τ - sec
7.5
8.0
8.5
9.0
9.5
10.0
-2.5 -2 -1.5 -1 -0.5 0 0.5 1 1.5
0.001 sec-1
0.0001 sec-1
0.00001 sec-1
Log 10
Ten
sile
You
ng's
Mod
ulus
- P
a
Log10
τ - sec
[ ] ( )pD εεσ ∆−∆=∆ (49) where
zxyzxyzzyyxx σσσσσσσ ∆∆∆∆∆∆=∆ ,,,,, (50) It is assumed that, consistent with plasticity theory in general, the hardening modulus depends on the strain and the strain rate [13]. The dependence upon strain rate is expressed as a shift function with regard to a basis value of strain rate. It has the form
)(
)(0
2
01
effeff
effeffS s
sa
εεεε−+
−= (51)
where 0effε is the basis value of strain rate and 1s and 2s are constants to be
determined from curve fitting. The dependence of the hardening modulus on strain is expressed as
2321 )()( SeffSeff aaaaaH −+−+= εε (52)
where 2/1222222 )](
23)()()[(
)1(22
zxyzxyxxzzzzyyyyxxeff εεεεεεεεευ
ε +++−+−+−+
= (53)
Figure 1: Log compressive (left) and tensile (right) Young’s modulus versus Log relaxation time for Mock 900-21.
3 Application
The formulation thus presented has been used to develop a User MATerial Subroutine (UMAT) for the ABAQUS implicit finite element code. Mock materials are developed to simulate the response of HE materials because the mock materials can be conventionally tested whereas the HE materials usually cannot be. For example, Mock 900-21 is designed to simulate the strength and
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
116 Computational Ballistics III

density properties of the high-explosive material PBX 9501. The theory/formulation described herein is applied to Mock 900-21 for the purpose of validating the material model.
Figure 2: Log compressive (left) and tensile (right) Young’s modulus versus Log relaxation time for Mock 900-21.
Figure 3: Relationship between log of rate of growth of crack radius and log of effective strain rate in compression (left) and tension (right) for Mock 900-21.
Compressive strain rate data were obtained from tests conducted by Cady [14], and tensile strain-rate test data were obtained from tests conducted by Thompson [15]. Compressive tests were for rates of 0.001, 0.01, 0.1 and 1.0 per second. Tensile tests were for rates of 0.00001, 0.0001 and 0.001 per second. These tests were used exclusively to determine the viscoelastic, damage and plasticity parameters employed in the material model to predict the response of the Mock 900-21. Each set of uniaxial strain-rate data was converted from a true stress versus true strain data set to a Young’s modulus (Pa) versus relaxation
0.0 100
5.0 108
1.0 109
1.5 109
2.0 109
2.5 109
3.0 109
3.5 109
K
-8 -6 -4 -2 0 2 4
Shea
r Mod
ulus
- P
a
Log10
τ - sec5.0 108
1.0 109
1.5 109
2.0 109
2.5 109
3.0 109
3.5 109
G
-8 -6 -4 -2 0 2 4
Shea
r Mod
ulus
- P
a
Log10
τ - sec
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-3.5 -3 -2.5 -2 -1.5 -1 -0.5 0 0.5
Vres
Log 10
V res -
m/s
ec
Log10
Effective Strain Rate - sec-1
y = -1.1914 + 0.92119 x
0.000
0.01000
0.02000
0.03000
0.04000
0.05000
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012
Vres
V res -
m/s
ec
Effective Strain Rate - sec-1
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 117

time (sec) data set. The relaxation time was obtained by dividing strain by strain rate. Each of these data sets was then converted to a log Young’s modulus (Pa) versus log τ (sec) data set. These data are shown plotted in Figure 1. Fitting the upper-most data points in Figure 1 yields expressions for the compressive relaxation modulus and the tensile relaxation modulus, respectively. With a value of Poisson’s ratio of 0.30, and 10 generalized deviatoric Maxwell model elements, each separated by a decade of relaxation time, as shown in Figure 2, the linear viscoelastic models for the material are established. It was found, and is thus noted, that the elastic/viscoelastic material properties for Mock 900-21 are different in compression and tension. For the compressive strain-rate tests, using the procedure described earlier, a linear relationship between log )( )resv and log )( effε was established for Mock 900-21. This is shown in Figure 3. The yield behavior of Mock 900-21 in compression and in tension is also quite different, as one might expect. For tensile strain-rate tests, again using the procedure described earlier, a relationship between resv and
effε was established; this relationship is shown in Figure3. The numerical values
of the plasticity parameters found in Equations (51) were 51 4.0322 10s x −= − ,
32 1.1178 10s x −= sec-1, and 0 0.001effε = sec-1, and the values of those found in
Equations (54) were 31 4.7863 10a x= Pa, 6
2 6.1878 10a x= Pa, and 9
3 2.1976 10a x= Pa. Finally, comparisons between model predictions and test results are shown in Figures 4 and 5, Figure 4 for compressive loading and Figure 5 for tensile loading.
Figure 4: Uniaxial compressive stress-strain relationship for Mock 900-21: (a) test data, (b) simulation.
0.0 100
5.0 106
1.0 107
1.5 107
2.0 107
2.5 107
0 0.02 0.04 0.06 0.08 0.1 0.12
1.0 sec-1
0.1 sec-1
0.01 sec-1
0.001 sec-1
True
Str
ess
- Pa
True Strain(a)
0.0 100
5.0 106
1.0 107
1.5 107
2.0 107
2.5 107
0 0.02 0.04 0.06 0.08 0.1 0.12
1.0 sec-1
0.1 sec-1
0.01 sec-1
0.001 sec-1
True
Str
ess
- Pa
True Strain(b)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
118 Computational Ballistics III

0.0 100
5.0 105
1.0 106
1.5 106
2.0 106
2.5 106
3.0 106
0 0.0005 0.001 0.0015
0.001 sec-1
0.0001 sec-1
0.00001 sec-1
Tru
e S
tre
ss
- P
a
True Strain
(a)
0.0 100
5.0 105
1.0 106
1.5 106
2.0 106
2.5 106
3.0 106
0 0.0005 0.001 0.0015
0.001 sec-1
0.0001 sec-1
0.00001 sec-1
Tru
e S
tre
ss
- P
aTrue Strain
(b)
Figure 5: Uniaxial tensile stress-strain relationship for Mock 900-21: (a) test data, (b) simulation.
4 Conclusions
Results obtained from the analyses performed using this material model for the Mock 900-21material indicates that the model performs satisfactorily. Since Mock 900-21 exhibits flow characteristics subsequent to reaching its damage-controlled yield strength in tension, the plasticity theory developed for computational modeling in conjunction with the coupled viscoelastic/damage model was applicable to this material.
References
[1] Schapery, R.A., Nonlinear Viscoelastic Solids, International Journal of Solids and Structures, 37, pp 359-366, 2000.
[2] Addessio, F.L. & Johnson, J.N., A Constitutive Model for the Dynamic Response of Brittle Materials, Journal of Applied Physics, 67(7), pp. 3275-3286, 1990.
[3] Anderson, T.L., Fracture Mechanics, Fundamentals and Applications, Second Edition, CRC Press, Inc., pp. 31-99, 205-220, 1995.
[4] Dienes, J.K., A Unified Theory of Flow, Hot-Spots, and Fragmentation with an Application to Explosive Sensitivity. High-Pressure Shock Compression of Solids II, eds. L. Davison, D.E. Grady & M. Shahinpoor, Springer Verlag: New York, Chapter 14, pp. 366-398, 1996.
[5] Dienes, J.K., Strain-Softening via SCRAM, Los Alamos National Laboratory Report, LA-UR-98-3620, 1998.
[6] Dienes, J.K. and Kershner, J.D., Multiple-Shock Initiation via Statistical Crack Mechanics, Proceedings of the 11th Symposium on Detonation, eds. J.M. Short & J.E. Kennedy, Snowmass, Colorado, USA, 1998.
[7] Johnson, J.N. Personal communication, May 2004, Technical Staff Member, Los Alamos National Laboratory, Los Alamos, USA.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 119

[8] Lubliner, J. Plasticity Theory, Macmillan Publishing Company, 1990 [9] Simo, J.C. & Hughes T.J.R., Computational Inelasticity, Springer-Verlag
New York, 1998. [10] Khaleel, M.A., Zbib, H.M., & Nyberg, E.A., 2001, Constitutive Modeling
of Deformation and Damage in Superplastic Materials, International Journal of Plasticity, 17, 277-296.
[11] Johansson, M. & K. Runesson, K., Viscoplasticity with Dynamic Yield Surface Coupled to Damage, Computational Mechanics, 20, pp 53-59, 1997.
[12] Steeb, H. and E. Ramm, A General Framework for Local Error Estimation Applied to Material Nonlinear Problems, European Congress on Computational Methods in Applied Sciences and Engineering, ECCOMAS 2000, Barcelona, 11-14 September, p. 1-14, 2000.
[13] Fish, J. & Shek, K., Computational Plasticity and Viscoplasticity for Composite Materials and Structures, Composites Part B, 29B, pp613-619, 1998.
[14] Cady, C.M. Personal communication, Aug 2004, Technical Staff Member, Los Alamos National Laboratory, Los Alamos, USA.
[15] Thompson, D.G., Personal communication, Aug 2004, Technical Staff Member, Los Alamos National Laboratory, Los Alamos, USA.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
120 Computational Ballistics III

Section 4 Experimental
mechanics/ballistics and field testing

This page intentionally left blank

Offshore platforms survivability to underwater explosions: part I
A. A. Motta1, E. A. P. Silva2, N. F. F. Ebecken2 & T. A. Netto2 1Brazilian Navy Research Institute, Rio de Janeiro, Brazil 2Federal University of Rio de Janeiro, Rio de Janeiro, Brazil
Abstract
Recent developments in the Brazilian oil industry led to the necessity to conduct offshore platforms underwater explosions (undex) survivability studies. The ongoing research has been segmented in parts, including theoretical and experimental correlated studies. Part of this study involves computer simulation, and, therefore, the necessary validation of the developed models used in such simulations. The existence of benchmark problems helped to establish a guideline to be followed in the study of underwater explosions effects on structural elements and simple and well-controlled experiments are being conducted to be used to calibrate the computer models. In this work, one of these benchmark problems is presented, along with its experimental implementation: a submerged aluminum cylinder submitted to the undex effects. This problem was proposed by Kwon and Fox in 1993. Results will be collected for the direct shockwave load, the bubble-produced shockwave load, and for both, although the primary interest relies on the shockwave effects. Keywords: underwater explosion, offshore platforms, simulation, survivability.
1 Introduction
The underwater explosions (undex) terminal effects on semi-submerged steel structures, such as offshore platforms, is a very complex problem, in which individual parts failure can lead to buoyancy or stability problems that can result, in extreme cases, in the loss a platform or in irreversible environmental damage. Since the cost scale in this segment is in order of millions of US dollars, the savings are obvious, and it is imperative, thus, to understand how undex can
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 123
doi:10.2495/CBAL070111

affect these intricate structures and how design modifications can be introduced in order to improve their survivability probability. This problem was presented in [2]. The Submarine Technology Laboratory of the Federal University of Rio de Janeiro started the study of such phenomenon. General guidelines were established based on the available information in the literature and recent developments in current related research. It was decided that the starting point of this study would be on-site small-scale undex experiments, which are currently under development. A tank has been built and the necessary instrumentation is being assembled to perform the tests, similar to available benchmark problems, which are to be conducted in conjunction with computer simulation using Abaqus [3], providing validation material. In this work, the problem presented in reference 1 is outlined, and its current experimental implementation is presented. Although there are no results available to be presented at this time, it is expected that important data will result from it, allowing the research to move on to more elaborate problems.
2 Underwater explosions and exponential approximation
Underwater explosions and their effects on submerged structures were approached in [2]. When an undex happen, a shockwave is instantaneously produced, spreading in all directions. The resulting detonation products form a bubble that pulses, expanding and contracting, while moving toward the surface, and emitting a pressure pulse every time there is an inversion from expansion to contraction and vice-versa. Detailed information on undex and underwater shockwaves are given by Cole [4] and other studies, [5–11], among many other references available in the literature. As shown in [2], the exponential approximation is widely accepted to represent the shockwave produced in an undex. Various models have been proposed by different authors, all leading to very similar results. In this approximation, the shockwave is represented by an impulse (in which the amplitude is distance-dependent) with exponential decay in time, according to:
P(t) = Pmáx * e -( t / τ ) [Pa] (1) where:
Pmáx = K1 * ( W1/3 / d ) * A1 [Pa] (2)
τ = K2 * W1/3 * ( W1/3 / d ) * A2 [s] (3) W - is the explosive mass, in TNT-equivalent τ - time constant d - distance from the explosion source K1, K2, A1, A2 - parameters suggested by the author Models have been introduced for various types of explosives and media, and the one adopted in this work was the model presented by Felippa et al [5] and Shin and Geers [6].
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
124 Computational Ballistics III

3 The reference problem
The model problem herein presented is derived from the one proposed by Kwon and Fox [1]. In the original problem, a submerged T6061-T6 aluminum cylinder is exposed to the shockwave produced by the detonation by 60 lb of HBX-1, positioned at a 7.62 m distance from the cylinder surface. The cylinder particulars are: overall length of 1.067 m; outside diameter of 0.305 m; wall thickness of 6.35 mm, and 24.5 mm thick welded endcaps. The cylinder is suspended horizontally in a 40 m deep fresh water test quarry, and the cylinder and the explosive charge are both placed at a depth of 3.66 m. These distances were selected so that cavitation and the bubble pulses can be neglected, as well as reflected waves on the quarry walls and on the free surface. The test profile is presented in figure 1.
Figure 1: Undex test profile proposed by Kwon and Fox [1].
Figure 2: Pressure load curve obtained by Kwon and Fox [1].
A series of strain gauges are placed on the cylinder outer surface and the experimental data is filtered in 2,000 Hz. Two pressure transducers are used to measure the shockwave intensity at 7.62 m from the source, away from the cylinder for validation purposes. Figure 2 shows the pressure curve as determined by the authors. The cut-off time is set to 2 ms. In the Abaqus explicit Finite Elements model, the cylinder was discretized in 2,400 quadrilateral shell elements, and the fluid in 45,586 acoustic tetrahedral elements, in a total of 23,337 active degrees of freedom, and the transient
3.66 m
7.62 m explosive charge
cylinder
0.00
2.00
4.00
6.00
8.00
10.00
12.00
14.00
16.00
18.00
0.0000 0.0005 0.0010 0.0015 0.0020 0.0025Time (s)
Pres
sure
(MP
a)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 125

analyses is run for 8 ms. The outer fluid boundary radius was established as 6 times the cylinder radius, which corresponds to an added mass error of about 6% for infinite cylinders when compared to an infinite boundary. This is necessary so that the added mass associated with the low-frequency beam bending modes of the cylinder is represented adequately. Table 1 shows the added mass ratio for various fluid boundaries / cylinder radius ratio. Figures 3 and 4 present the complete mesh and more detailed information regarding the cylinder (figure 4(a)) and the fluid (figure 4(b)).
Table 1: Added mass ratio with respect to the radius ratio.
Figure 3: Complete mesh for the Finite Elements implementation for the
problem proposed by Kwon and Fox [1].
4 The ongoing experiment
The ongoing experiment is very similar to the proposed by Kwon and Fox [1]. The main differences are the cylinder characteristics and material (commercial 2 inches T6061 aluminum pipe), the explosive type and amount, and the distances involved. The media is about the same (still water). Figure 5 shows the tank under construction where the experiments are to be conducted. Its characteristics and location are such that will allow full control of testing conditions, including the water temperature and salinity.
Fluid Boundary / Cylinder Radius Ratio
Added Mass Ratio (External Boundary/Infinite Domain)
1.5 2.6002.0 1.6674.0 1.1336.0 1.0578.0 1.032
16.0 1.00824.0 1.004
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
126 Computational Ballistics III

(a) (b) Figure 4: Mesh details for the Finite Elements implementation of the problem
proposed by Kwon and Fox [1], showing the fluid and the cylinder.
Figure 5: General view of the tank being built to perform the undex experiments.
In figure 6, a general schematics view of the tank is presented. The water mass depth will be 1500 mm, and the aluminum tube, the explosive charge (in the center of the tank), and the transducers are to be positioned in a 750 mm deep horizontal plane (this will maximize the time for the reflected waves to reach the target, to be set as cut-off time for the experiments). For this small-scale experiment, charges up to 10 g are to be used, positioned from 200 to 700 mm away from the 1500 mm aluminum air-filled cylinder. The cylinder ends will be welded to thick plates that will be fixed in an “inertial” device, as sketched in figure 7, to ensure that they will be fully constrained.
5 Expected results and comments
As long as the cylinder does not collapse, it is of interest to know its residual strain. Figure 8 presents the accumulated equivalent plastic strains (PEEQ) for the reference problem, as simulated with Abaqus.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 127

Figure 6: General schematics of the tank being built to perform the undex experiments. The aluminum tube, the explosive charge (in the center of the tank), and the transducers are to be positioned as shown, at half the depth of the water mass.
Figure 7: The cylinder ends are to be welded to thick plates that will be mounted in an “inertial” device.
Figure 8: The accumulated equivalent plastic strains (PEEQ) for the reference problem, as simulated with Abaqus.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
128 Computational Ballistics III

It is noticeable that important information can be obtained from the numerical simulation, and Abaqus has shown to be suited for this purpose. The experiments outcome will be used to validate the simulation and, hopefully, while providing new insights about the phenomenon, they will point in the next step direction, where more complex models will be used to provide further information, and so on.
6 Final remarks
Structural elements response to underwater explosions are being studied to provide insight to the more complex problem of how these impulsive loads affect offshore platforms. An environment to perform real experiments is under construction, and small-scale tests will be used along with numerical analysis, starting from simple configurations and following into more complex problems and steps are concluded. It is expected to obtain, from this study, data enough to allow the introduction of design modifications for new platforms to increase their survivability chances if exposed to such loads, as well as the elaboration of contingency plans for platforms already in use and for which modifications are not feasible.
References
[1] Kwon, K. W., and P. K. Fox, “Underwater Shock Response of a Cylinder Subjected to a Side-On Explosion,” Computers and Structures, Vol. 48, No. 4, 1993.
[2] Ballistics studies applied to offshore platforms, Second International Conference on Computational Ballistics, eds. C. A. Brebbia, V. Sanchez-Galvez, A.A. Motta, and C. E. Anderson, WIT Press: Southampton and Boston, pp. 371-380, 2005.
[3] Abaqus v.6.5, Abaqus, Inc, (http://www.abaqus.com). [4] Cole, R. H., Underwater Explosions, Princeton University Press:
Princeton, 1948. [5] Felippa, C. A., Geers, T. L. and DeRuntz, J. A., The Underwater Shock
Analysis Code: A Reference Manual, Lockheed Palo Alto Research Laboratory, Palo Alto, 1980.
[6] Shin, Y. S. and Geers, T. L., Response of Marine Structures to Underwater Explosions, Short Course, 1993.
[7] Shin, Y. S., Underwater Explosion Research, Volume I – The Shock Wave, Office of Naval Research, US Department of the Navy, 1950.
[8] Shin, Y. S., Application of the USA Code to Underwater Shock Problems, Shock and Vibration Information Analysis Center, 1997.
[9] Shin, Y. S., Experimental Study of Underwater Explosion Phenomena, NDRC, AD 268.905, Vol. 8.
[10] Motta, A. A., Underwater explosive charges optimization with respect to their terminal effects on submerged steel structures, Dissertation, Federal University of Rio de Janeiro, Rio de Janeiro, 2004.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 129

[11] Motta, A. A. and Ebecken, N. F. F, Steel structures optimization to resist underwater shockwaves - explosive charges optimization, Structures Under Shock and Impact VIII, eds. N. Jones and C. A. Brebbia, WIT Press: Southampton and Boston, pp. 121-128, 2004.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
130 Computational Ballistics III

Ballistic tests and numerical simulations forcontainment capability characterisation ofWaspaloy alloy
M. Di Sciuva1, M. Degiovanni1, M. Mattone1, M. Gherlone1,N. Bonora2, A. Ruggiero2 & C. Frola3
1 Aerospace Engineering Department, Politecnico di Torino, Italy2 Industrial Engineering Department, Università di Cassino, Italy3 Engineering Advanced Technology, Avio S.p.A., Italy
Abstract
This article presents the results of an experimental and numerical activity forthe characterisation of the containment capability of Waspaloy alloy, used forthe case in aircraft engines. The ballistic facility is described and the impactexperiments outcomes are discussed; some preliminary numerical simulations arealso briefly presented.Keywords: blade containment, ballistic tests, airgun, Waspaloy, high strain rate,impact response.
1 Introduction
Turbine casings are the heaviest elements of an aircraft engine, thus the lighteningof the containment case, without jeopardizing the structural integrity level, wouldlead to great advantages such as the reduction of the absolute weight of the wholeengine and to an increase of the engine performance (specific thrust per unitweight), Kelvin [1].
In casing design, the minimum thickness allowed for the released bladecontainment requirements [2, 3] is usually determined via the use of experimentalballistic curves and, eventually, endorsed by blade out event FEM simulations[1, 4–7]. A possible work plan for casing containment design could be: (1) toobtain, through experiments, both the static and the dynamic characterisation ofthe material (in the strain rate range of interest), (2) to perform the ballistic tests
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 131
doi:10.2495/CBAL070121

on the specimens with which looking for the minimum containment thickness, (3)to validate the FEM model of the ballistic tests (using the material characterisationcoming from step (1)) in order to simulate with an appropriate accuracy theexperimental results, (4) to obtain, via a set of reliable FEM simulations, acontainment curve to be used during the design process. While step (1) and (2)are mainly experimental in nature, steps (3) and (4) can be performed using adesign-by-analysis approach based on extensive use of numerical simulations.Experimental testing is mandatory because of two main reasons, at least: (a) tocharacterize material behaviour at high strain rates and (b) to validate thenumerical simulation framework. Also FEM simulations are required in order todescribe a containment curve without recurring to experimental tests. Anyway,both the ballistic tests and the FEM simulations should be limited to a reasonablenumber: tests are very expensive both for the set up of the facility and for thecost of specimens, numerical calculations need much time for modelling and forthe analysis. Thus, by means of response surface techniques based on a reducednumber of tests/simulations, it is possible to describe the dependence of thecontainment thickness from the key parameters of the problem (kinetic energyof the projectile, material, etc.) [4, 8, 9].
In this paper we present the ballistic tests conducted on some Waspaloy alloyplates. The experimental set-up and results are presented. Static and dynamicmaterial characterisation is briefly presented; a detailed discussion on these resultsmay be found in Bonora et al [10]. A preliminary FEM simulation including asimplified model of the material static and dynamic behaviour is performed andcompared with the experimental results.
2 Ballistic tests
2.1 Airgun facility
The ballistic tests have been conducted by means of an airgun facility at theAERMEC - Aeromechanical Structural Systems laboratory of the AerospaceEngineering Department of Politecnico di Torino. The experimental set-up consistsof a pressure tank (air filled, maximum operating pressure: 14 bar), a shootingcontrol system, a support structure for targets and a velocity measuring system thatallows also to control the trajectory and attitude of flight of the projectile. Someprotection shields are located around the impact area as well to stop the bullet afterit has hit the target. In fig. 1 an overall functional scheme of the airgun facilityis presented. The facility includes a set of barrels of various lengths allowing toadequately cover a wide range of speed until 250 m/s; barrels’ inside diameter is38, 1 mm (1, 5 inch).
The projectile is made up of a steel cylinder attached on the top of a polyurethanefoam cylinder (later on called sabot), the all wrapped with thermo-shrinkingpacking like shown in fig. 2. The dimensions of the projectile are reported intable 1; the projectile’s mass is that of a small turbine blade (engines for executiveairplanes). The sabot allows to guide the projectile inside the barrel avoiding
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
132 Computational Ballistics III

Figure 1: Overall functional scheme of the airgun facility.
rotations and scratches, while the thermo-shrinking packing warrants the projectileintegrity and its constant length as well; the last feature is particularly importantfor a correct measurement of the projectile’s velocity before the impact.
The shooting control system is based on a Mylar membrane that separates thefiring section from the pressure tank and barrel; Mylar membrane is designedto hold out the tank’s maximum operating pressure and its burst is induced froman electrical resistance by Joule effect. Two EPDM rubber packings act as electricinsulator and as air seal. Both EPDM rubber packings and Mylar membrane arepunching so that they can be inserted in the tightening system as shown in fig. 3.
Table 1: Projectile’s dimensions and masses.
diameter (mm) length (mm) mass (g)
steel cylinder 33 10 67sabot 37 50 5
thermo–shrinking packing - - 4, 5
The projectile is inserted into the rear end of the barrel then the diaphragm isinserted in the tightening system which is closed; compressed air is pumped into
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 133

Figure 2: Pictures of projectile made up of a steel cylinder, a polyurethane foamcylinder and a thermo-shrinking packing.
the pressure tank. At firing, the electrical resistance bursts the Mylar membraneand the projectile is accelerated along the barrel; then it leaves the muzzle and itpasses the velocity measurement station before that it impacts the target after about0, 5 m of free flight.
The target’s support structure allows to set the plate with an angle of 60
between the normal to its surface and the projectile’s trajectory, Arace [8]. Theplate is simply supported by a rectangular steel frame. Four stoppers are set inthe frame’s corners to prevent plate’s sliding during the impact. Also, the target’ssupport structure is designed to realize an adequate connection with the airgunbox so as to transmit the impact forces on the box itself; the high support structurestiffness assures that great part of the strain energy is charged to the panel as well.A picture of target’s support structure is shown in fig. 3.
Three laser-light sources on one side of the projectile path and three diodedetectors on the other side are used and mounted in lines to match themselvesand to measure the projectile’s velocity. When the projectile passes between thesources and detectors, laser-light is interrupted and signals are given and stored toa digital oscilloscope: as projectile’s length and distances between laser-beams areknown, it is possible to estimate both “instantaneous” velocity and average velocityof the projectile just before the impact. The first laser-beam works also as a triggerfor the digital high-speed camera system used in the tests. PCO SENSICAM QEdigital camera system is used together with three flash-lamps system to control thetrajectory and attitude of flight of the projectile both before and while it impactsthe target; the airgun box is equipped with two framing windows to allow the high-speed camera to photograph and the flash-lamps to light properly both projectileand target. The system is able to take some snapshots after the projectile leaves themuzzle and while it impacts the target, as shown in fig. 4.
Measurement of velocity is the main feature in experimental ballistic tests. Theequipment described above has been purpose-built for this particular applicationand it was therefore necessary to check it; tests were carried out where projectileswere fired through the impact chamber at different velocities without a target
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
134 Computational Ballistics III

(a) (b)
Figure 3: (a) Picture of target’s support structure; (b) Sketch of the shooting controlsystem.
Figure 4: PCO SENSICAM QE digital high-speed camera system. On the left, firstframe with four snapshot of the projectile travelling versus the target; onthe right, second frame with single snapshot of the impact.
plate. Good agreement was found between the velocity estimated by the laser-beams system and the images obtained from high-speed camera.
2.2 Experimental results
At first, a firing tuning process has been done through many preliminary shoot teststhat have resulted in a pressure–velocity calibration curve of the system, constantlyupdated by new tests.
A ballistic campaign has been carried out on four plates of Waspaloy alloywhose geometric characteristics are indicated in table 2. All plates are of the samethickness so the experimental goal is to determine a kinetic energy range insidewhich the limit value resides for the thickness in examination.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 135

The speed with which to start the ballistic campaign has been evaluated throughan energetic method based on an empirical equation obtained for correlation withexperimental data, Di Sciuva et al [4]
t = a · (Ekin)b (1)
where t is the plate’s thickness, a and b are obtained by experimental data fittingand Ekin is the kinetic energy of the projectile.
In table 2 are reported all information about several ballistic tests, particularlythe projectile’s characteristics, the impacts’ average speeds, therefore the kineticenergy and the experimental result (C = containment, NC = not containment) arepointed out; all values of velocity and kinetic energy are dimensionless becausethey are confidential company data. In particular, velocities and kinetic energiesare divided by the corresponding (containment) limit values.
In figs. 5–6 are shown some photos of the plates #2 and #4.
Table 2: Plates’ geometric characteristics and ballistic experimental results.
Plate Projectile
# a (mm) b (mm) h (mm) m (g) V Ekin C/NC
1 300 300 1, 00 76, 5 1, 398 1, 955 NC2 300 300 1, 00 76, 5 0, 917 0, 841 C3 300 300 1, 00 76, 5 1, 203 1, 448 NC4 299 299 1, 00 76, 5 1, 083 1, 173 NC
3 Static characterisation
Quasi-static tensile tests were carried out according to ASTM standards [11,12, 13] to identify the material mechanical properties of the Waspaloy. Sevenspecimens were used in order to make a proper statistical survey. Both target’splates and specimens were obtained from the same sheet.
The engineering and true mechanical properties for the target are given intable 3; fig. 7 shows the quasi-static tensile engineering stress-strain curve for thetarget; such information are required in order to calibrate both the analytical model(ref. eqn. 1) and the numerical simulation.
Furthermore, the dynamic response of Waspaloy at high strain rate has beeninvestigated by means of direct tension Hopkinson pressure bar (DTHPB). Usinground bar samples with different reference lengths, the material response in thestrain rate range (from 700 s−1 up to 3200 s−1) expected to occur under dynamicimpact conditions, has been experimentally determined and used to derive theconstitutive model to be used in the FEM simulations.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
136 Computational Ballistics III

Figure 5: Experimental results: Waspaloy alloy plate #2, 300× 300× 1, 00 mm,Ekin = 0, 841.
Figure 6: Experimental results: Waspaloy alloy plate #4, 299× 299× 1, 00 mm,Ekin = 1, 173.
4 Preliminary FEM simulation
A preliminary estimation of numerical capability to reproduce the experimentalballistic results, using MSC.Dytran, has been done (Degiovanni [14]). A finiteelement model representative of the true experimental tests has been realized;it is made up of about 270.000 HEXA8 solid elements (with 3 elements in thethickness) and a failure model based on a maximum equivalent plastic strain isused. For these first analyses the material model employed considers in simplifiedway the mechanical characteristics, both static and dynamic, obtained from therespective tests.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 137

Table 3: Quasi-static mechanical properties for Waspaloy alloy.
Engineering Data True DataProperty Unit mean value standard mean value
deviation
Density (kg/m3) 8090 - -Tensile ultimate strength (MPa) 1264 8, 8733 1590Tensile yield strength (MPa) 692 12, 5884 695Elongation at break (mm/m) 288, 85 5, 239 25Poisson coefficient 0, 2871 0, 0119 -Young Modulus (MPa) 226930 2423, 4 -
Figure 7: Quasi-static tensile engineering stress-strain curves of Waspaloy alloy.
Some results are shown in fig. 8 for the velocity of two different projectiles,respectively about experimental limit events of containment and not containment.As preliminary outcomes they show a good agreement with the ballistic tests.
5 Conclusions
The design of aircraft engines has also to face containment problems; any object(released blade, disk fragment) impacting the protection case must be containedaccording to regulations. The evaluation of minimum containment thickness isnormally based on simple thickness vs kinetic energy curves; anyway, these curvesare obtained through extensive campaigns of experimental tests and numericalsimulations. The present article describes some results of a ballistic tests campaignon Waspaloy alloy plates and some preliminary numerical simulations of theimpact experiments; these show that good correlation with tests is obtained (due
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
138 Computational Ballistics III

(a) Ekin = 0, 841 (b) Ekin = 1, 173
Figure 8: Numerical results of preliminary FEM simulation of Waspaloy
containment capacity (MSC.Dytran).
to a reliable experimental evaluation of the material mechanical properties, bothquasi-static and at high strain rates).
Acknowledgements
The authors from Politecnico di Torino gratefully acknowledge Messrs GiuseppeRuvinetti and Lorenzo Mascarello for the helpful and constant technical supportduring ballistic tests. Also, they acknowledge Regione Piemonte for funding theiractivity (“Multidisciplinary optimisation of aerospace structural systems”, ProjectE57) in the framework of “Bando Regionale per la Ricerca Scientifica 2004”.
The author from Avio S.p.A. acknowledges Dr Antonino Vassallo for hiscontribution to the activity.
References
[1] Kelvin Y. N., Turbine Rotor Burst Containment Analysing using Msc/Dytran,Hamilton Standard (United Technologies), Internal Report, 1996.
[2] FAR 33.94 – Blade containment and rotor unbalance tests, Federal AviationAdministration, 1984.
[3] AC 20–128A – Design Considerations for Minimizing Hazards causedby Uncontained Turbine Engine and Auxiliary Power Unit Rotor Failure,Federal Aviation Administration, 1997.
[4] Di Sciuva M., Frola C. & Salvano S., Low and high velocity impacton Inconel 718 casting plates: ballistic limit and numerical correlation,International Journal of Impact Engineering, 28, pp. 849–876, 2003.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 139

[5] Carney K., Pereira M., Revilock M. & Matheny P., Jet engine Fan BladeContainment using Two Alternate Geometries, Proc. of the 4th European LSDyna Users Conference, Ulm (Germany), 2003.
[6] Sarkar S. & Atluri S. N., Effects of multiple blade interaction on thecontainment of blade fragments during a rotor failure, Finite elements inAnalysis and Design, 23(2), pp. 211–223, 1996.
[7] Krauss A. & Frischbier J., Containment and penetration simulation in caseof blade loss in a low pressure turbine, MTU Aero Engines GmbH, InternalReport, Monaco, Germany, 2002.
[8] Arace F., Gherlone M. & Frola C., A simplified methodology for containmentcase design, Proc. of the XVIII AIDAA National Congress Volterra (Italy),2005.
[9] Liu D. & Stronge W.J., Ballistic limit of metal plates struck by bluntdeformable missiles: experiments, International Journal of Solids andStructures, 37(10), pp. 1403-1423, 2000.
[10] Bonora N., Ruggiero A., Di Sciuva M., Degiovanni M., Mattone M.,Gherlone M. & Frola C., Nickel base superalloy containment case design:constitutive modeling and computational analysis, to be submitted to Int. J.of Solids and Structures.
[11] ASTM E 8 – Standard Test Methods for Tension Testing of MetallicMaterials. ASTM International.
[12] ASTM E 1012 – Standard Practice for Verification of Test Frameand Specimen Alignment Under Tensile and Compressive Axial ForceApplication. ASTM International.
[13] ASTM E 111 – Standard Test Method for Young’s Modulus, TangentModulus, and Chord Modulus. ASTM International.
[14] Degiovanni M., Indagine numerico sperimentale di soluzioni strutturaliottimizzate per casing di motori aeronautici, Report DIASP-259, Politecnicodi Torino, 2006
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
140 Computational Ballistics III

Experimental survey of the pressure cone and
K. Krallis1, Ν. G. Orfanoudakis2, M. Founti3, D. T. Hountalas3, A. Fatsis2 & N. Vlachakis4 1Heron Consultant Engineers, Har. Trikoupi 107, 11473 Athens, Greece 2Technical University of Chalkis, Department of Mechanical Engineering, 34400 Chalkis, Greece 3National Technical University of Athens, Department of Mechanical Engineering, Zografou Campus, Athens 15780, Greece 4Engineering Science and Mechanics Department, Virginia State University, USA
Abstract
This paper describes the characteristics of the temperature and pressure fields measured downstream of the launcher of the Russian “FAGOT” anti-tank missile system. The experimental data were used to establish the proper location of the launcher on a vehicle used by the Greek Army. The pressure field developing at the rear of the missile launcher has the characteristics of a conical shock wave. The field was measured with an array of piezoelectric pressure transducers and a fast computer-based data acquisition system. The extent of the temperature field was established with high speed video and infra-red still photography and was confirmed with miniature thermocouple sensors. The results showed that the pressure cone intersects the ground level at a distance of 1.5 to 2.5 m behind the launcher. Typical overpressure of the shock wave was of the order of 1 to 1.8 bar. The conical shock wave breaks down into several smaller shock waves at a distance of 3 m and extends up to 15 m behind the launcher. The diameter of the cone at this location is 2.5–3.0 m. Keywords: missile launcher, measurements, pressure field, temperature field.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 141
doi:10.2495/CBAL070131
temperature field of an A/T missile system

1 Introduction
Most of existing information on the characteristics of the pressure cone and temperature field from missile systems is restricted and partially presented in International Symposia on Ballistics [1–5]. Temperature measurements at a 7.62 mm gun exit (muzzle flash) were performed under laboratory conditions by Klingenberg and Mach [1] using spectroscopy, absorption spectroscopy or high-speed photography with pre-calibrated film. Film techniques can be usually applied for field measurements, but should be used under low light conditions and with use of high-speed cameras. Measurements of density and exit gas velocity in a 20 mm gun as presented in [3, 4], have been performed with the use of Schlieren photography and laser Doppler anemometry methods. Both the above methods have serious shortcomings in case that they are applied in larger than laboratory scale. The application of Schlieren and laser Doppler anemometry in field measurements is prohibitive due to high costs and inaccuracies induced by limitations of the methods themselves. However, pressure measurements using piezoelectric transducers have been performed by Klingenberg and Schroder [2], Klingenberg [3] and Klingenberg et al. [4] with very good response, especially at the frequency of 20Hz. Pressure transducers are widely used for in cylinder measurements of internal combustion engines commercially available.
2 Instrumentation and experimental method
The work reported here has two major parts: the first refers to flow visualisation with the use of photography and the latter to pressure and temperature measurements. Various types of equipment have been used for the visualisation of the flow field developing at the rear of the launcher during launching conditions. High speed (24 frames/sec), high-resolution S-VHS video cameras allowed fast, real time recording of the phenomena. In addition, three professional SLR-cameras have been used: one panoramic Linhof 612, one Technorama, one EOS 1N and one high resolution ΕΟS 1NRS. The cameras were equipped with motor drives and zoom lenses of 28 -70 mm, F2.8L and 35 - 70 mm, F3.5-F5.6. During preliminary launches, amateur SLR-cameras with 100 ASA and infra-red films have been used to allow for representation of the different temperature zones. The flow field was seeded with 0-0.3 mm diameter, lightweight (density equal to 60 kg/m3), expanded perlite particles that could travel together with the exhaust gases at the tail end of the missile launcher. Perlite had been chosen to support the flow visualisation because is light and inert, as well as environmental-friendly. The pressure and temperature measurements have been performed with piezoelectric transducers and thermocouples, respectively. They have been mounted in selected positions on a specially designed and constructed metallic
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
142 Computational Ballistics III

frame, placed downstream of the gas exit of the launcher. The research team has designed the measuring system and has calibrated the measuring equipment and the necessary data acquisition system. The metallic frame has been constructed by 301 Technical Corps Unit of the Greek Army. In order to allow adequate representation of the pressure cone characteristics and at the same time to reduce the initial cost of the measurements, it was decided to use 5 transducers located axially and radially, at critical points, with respect to the launcher. It has been assumed that the pressure and temperature cones develop axi-symmetrically downstream the tail edge of the missile launcher. The signals from the piezoelectric transducers were amplified and together with the signals from the thermocouples were recorded using two independent data acquisition systems in order to avoid repetition of the costly measurements (i.e. launching of a FAGOT missile) associated with failure of the data acquisition systems.
Table 1: Characteristics of the measuring system.
Type of Equipment
Parameter Typical Characteristics
Pressure transducers: Kistler Piezotron Tranducer
Operation limit Sensitivity Eigen frequency linearity
0-20 bar or 0-200 bar 25mV/bar > 50 KHz <1%FSO
Pressure transducers' amplifier: Kistler
Nominal current Max. signal voltage Amplification Frequency response +5% (at 1 meg load & 10 Vpp) Max. Signal Voltage Curent Impedance Noise
2...18 mA 20 Vpp 0.5...5 from DC to 220 KHz 20 Vpp for unit amplification + 10mA 20Ω 250 µ for unit amplification
Analog-digital converter
Sampling frequency Number of analogue inputs Input Voltage Amplification Input Impedance Resolution Differential non linearity System accuracy
100 KHz 16 single inputs, 8 differential + 10 Volt 1,2,4 100 Megohms, 10pF (channel OFF) 100 Megohms, 10pF (channel ON) 12 Bit < 1LSB +0.05FSR
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 143

The data acquisition frequency was 1 and 2 kHz, established by literature review [1–4] and the signal cables were shielded to avoid noise and interference. For each launch 16000 data points have been recorded and stored. The electricity supply was provided by a military diesel generator, which in turn was connected to an UPS (uninterrupted power system), to avoid power surges. The characteristics of the pressure transducers, of the amplifiers and the data acquisition system used for the measurements, are shown in Table 1. Two very sensitive thermocouples (Φ5µm), with high response to temperature variations, were placed close to the gas exit and on the axis of symmetry. The thermocouples were installed on an old-used carrier. The temperature measured was actually the temperature of the carrier and not of the gases. Nevertheless, it is strongly connected to that of the gas, if the gas density and thermal conductivity, the heat transfer coefficient (from gas to thermocouple) and the thermal conductivity of the thermocouple are considered. The temperature measurements were recorded simultaneously with the pressure data using the same data acquisition system, as described above. There was generally a problem to synchronise the cameras and the instruments with the launcher itself because there was always a 1–1.5 s lag between triggering and launching. Installation of an external triggering adapter was not possible due to lack of technical information in relation to the launcher and the missile. Triggering of the cameras and of the data acquisition system was done manually. During the last group of measurements, four launches have been conducted and data recording had started well before and stopped well after the completion of the phenomenon, to allow optimum data analysis.
3 Results
3.1 Flow visualisation and photographic work
Preliminary determination of the pressure cone had been conducted by use of the photographic material collected during preliminary and main launches. The pressure, temperature measurements and the flow visualisation were, at most times, conducted simultaneously. This assisted the extraction of conclusions and comparison of the photographic and measurement data Flow visualisation allowed initial determination of the angle of launching and pressure cone. Expanded perlite of low density (60 kg/m3) has been used to fill the half section of a Φ120 mm and 1.5m long pipe, which in turn had been placed on the ground at the back of the launcher. Vertical staffs with red markings have been positioned every meter and allowed quick estimation of the cone height. The missile and the long pipe filled with expanded perlite particles are shown in Figure 1. It can be clearly seen that milliseconds (in fact 5 ms) after launching the pipe broke into pieces exactly at the point where the shock wave intersected the ground level. At this location the perlite particles got elevated due to the exerted pressure forces and thereafter followed the exhaust gas path-lines. A series of such photographs (e.g. Figure 2) allowed visual determination of the
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
144 Computational Ballistics III

pressure cone length and height, when launching is from the ground. Figure 1, also shows red-hot smithereens that ejected during and due to the launch flying along the pressure cone. The results from processing the photographic material can be summarized as shown in Table 2. Flow visualisation and photography were used to interpret the phenomena and to verify the pressure transducer and thermocouple results. Photographic work has served to establish the following: The angle of the thermal and pressure cone are not strongly dependent on the angle the launcher forms with the ground. The ‘front flame’ (i.e. the flame formed at the direction of the fly of the A/T missile) has a conical shape; it is ca. 0.4 – 0.9 m long, with diameter ca. 0.3 – 0.5 m. The pressure cone attains characteristics of intense turbulence mixing downstream the first 3 m from the gas exit. The cone has about 15m length and 2.5 to 3m height.
Figure 1: Visualisation of the pressure cone at the rear of the launcher.
Figure 2: Long distance view of the visualised pressure cone at the rear of the launcher.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 145

Table 2.
Geometry of the gunshot Height of the launcher from ground 40 cm Angle of launching 5 0 Mean flight velocity 180 m/s Measurements Area of max. ground pressure 2.0 – 2.5 m downstream the gas exit Area of max. temperatures 0.9 – 1.2 m downstream the gas exit Pressure cone downstream of the gas exit
length ca. 12 – 15 m, height ca. 2.5 – 3 m.
Thermal cone downstream of the gas exit
length 0.9 m, diameter 0.6 – 1.0 m
High light intensity Cone upstream of the launcher
length 0.4 – 0.9 m, diameter 0.3 – 0.5 m
F lam e co n e -h igh
tem p eratu rezon e
D irection o fflig h t
F lam e con e on th egas sid e - H ig h
tem p eratu re zon e
H ig h p ressu re zo n e
B ou n d aries o f sm ith ereen s ejectionzon e. A rea o f low p ressu re
U nits in (m )
Figure 3: Determination of danger zones during the launch of the FAGOT
A/T missile system.
The process of the flow visualisation showed that the angle, of the pressure cone with the ground is about 9o. Based on the photographic and experimental data Figure 3 was drawn in order to designate safe angles of launching (for personnel and vehicles). In this figure, the most important characteristics of the pressure and thermal cone are defined. In addition, areas where smithereens were ejected during and due to the launch are also designated.
3.2 Pressure and temperature measurements
The measurements of temperature and pressure are shown in Figures 4–6. For each measurement campaign, five different pressure transducers were used. Figure 4 represents the evolution of pressure and temperature with time for various positions of the transducers.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
146 Computational Ballistics III

Figure 4: Variation of pressure (above) and temperature (below) at various positions downstream the launcher.
Based on the maximum-recorded pressure at each known position of the pressure transducers the variation of maximum pressure with spatial location is plotted in Figures 5 and 6.
position (x,y)
curve Max. pressure (bar)
(0.5, 0) 0.0206 (1.0, 0) 0.28466 (1.5, 0) 0.3446 (2.5, 0) 1.075 (0.8, 0.3) 0.020
Sampling frequency: 2 kHz
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 147

Distance from launcher on the ground (m)
Shot
Shot
Shot Shot
Estimate
Pres
sure
(bar
)
Figure 5: Variation of maximum pressure along the axis of the launcher, which was positioned at 50 cm from the ground.
0
0.5 1
1.5 2
2.5 3
3.5
4
00.5
1
Pressure(Bar)
Axial distance from launcher (m)
Transverse distancefrom launcher
(m)
0.5-10-0.5
Figure 6: Constant pressure lines for launcher position at 50 cm from ground.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
148 Computational Ballistics III

Figure 5 demonstrates that the maximum value of the pressure occurs in a range between 1.5 and 2 m downstream of the gas exit. This statement is in agreement with the photographic results. The maximum measured pressure value was 1 ± 0.8 bar. This value is expected to vary with the change of the height of launcher from the ground (as for example, when the launcher would be installed on the military vehicle). Figure 6 shows the lines of constant pressure downstream of the gas exit, for launcher position at height 50 cm from the ground. This figure is representative for the installed height of the launcher.
4 Conclusions
This paper described the tasks undertaken to investigate the temperature and pressure fields behind the launcher of the Russian “Fagot” anti-tank missile system. The measurements were conducted in order to allow decision about the proper location of the launcher on a vehicle used by the Greek Army. The main conclusions can be summarised, for launch position at 50cm height from the ground, as follows: The pressure and thermal cone have characteristics independent from the angle of launching. Flame is generated at both sides of launcher; the characteristics of these flames are strongly dependent on the kind of the launch (successful and not). The maximum measured pressure on the ground was found to be at distance between 1.5 and 2.5 m downstream of the gas exit and it found to be 1 ± 0.8 bar. The pressure cone is extended 15 m downstream the gas exit, at a height of 2.5–3m, has turbulent characteristics. The angle between the cone and the ground is about 9o. The installation of the A/T launcher on a vehicle is safe under certain conditions.
References
[1] Klingenberg, G. and Mach, H.: “Investigation of Combustion Phenomena associated with the flow of Hot Propellant Gases - I: Spectroscopic Temperature Measurements Inside the Muzzle Flash of a Rifle”, Combustion and Flame, 27, pp. 163-176, 1976
[2] Klingenberg, G. and Schroder, G.A.: “Investigation of Combustion Phenomena associated with the flow of Hot Propellant Gases - II: Gas Velocity Measurements by Laser Induced Gas Breakdown”, Combustion and Flame, 27, pp. 177-187, 1976.
[3] Klingenberg, G.: “Investigation of Combustion Phenomena associated with the flow of Hot Propellant Gases - III: Experimental Survey of the Formation and Decay of Muzzle Flow Fields and of Pressure Measurements”, Combustion and Flame, 29, pp. 289-309, 1977.
[4] Klingenberg, G., Mach, H. and Smeets, G.: “Flow Field Measurements of an Unsteady Reacting Muzzle Exhaust Flow”, Transactions of ASME, 105, pp 884-888, 1983.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 149

[5] Stiefel, L., Editor: “Gun Propulsion Technology”, American Institute of Astronautics and Aeronautics, Progress in Astronautics and Aeronautics, 109, AIAA, Washington 1988.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
150 Computational Ballistics III

Section 5 New developments in
computational techniques

This page intentionally left blank

Safety checks and hit probability computationin numerical trajectory calculation using errorpropagation technology
A. Kuhrt & H. RotheUniversity of the Federal Armed Forces, Hamburg, Germany
Abstract
In fire control systems using numerical trajectory integration, safety checks andhit probability information still is based on empirical parameters. The need for amodern and precise security testing on a defined level of confidence and tailoredhit probability computation were the motivation to develop the technology outlinedin this paper. The methods are based on trajectory calculation using a modifiedpoint mass model that considers drag, lift, Magnus and Coriolis forces, gravity andall atmospheric influences. The Gaussian law of the propagation of the stochasticerror within a system of dependent and independent variables was used to generatea vector of standard deviations for all error afflicted parameters every integrationtime step. This approach leads to a flightpath dataset of the projectile, not onlygiving information about position and velocity, but also about their standarddeviations. The check for a minimum height over ground or distance to no-flyzones is very easy and can be performed with a changing level of confidencethroughout the trajectory. Hit probability calculation is done automatically andconsiders all current data that has influence on the projectile’s trajectory.Keywords: error propagation, safety checks, numerical integration, crestclearance, hit probability, multivariate statistics.
1 Introduction
In fire control systems using numerical trajectory integration, safety checks andhit probability information still is based on empirical parameters. Even modernsystems using time consuming routines on calculating numerical derivatives for atrajectory perturbation in order to gain hit probability information. The need for a
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 153
doi:10.2495/CBAL070141

precise security testing on a defined level of confidence and tailored hit probabilitycomputation were the motivation to develop the technology outlined in this paper.The methods are based on trajectory calculation using a modified point mass modelthat considers drag, lift, Magnus and Coriolis forces, gravity and all atmosphericinfluences.
2 Fire control software
Modern fire control software mostly is strongly unitized to cover a wider range ofdifferent weapon systems or ammunition types. This leads to a data-handling thathas to be taken into consideration. Trajectory calculation has to meet the demandson both, computation time and accuracy. That influences the numerical methodand the physical model used.
2.1 Trajectory calculation
The trajectory calculation used in modern Fire Control Software is mostly basedon a set of differential equations (DEQ) incorporating a modified point mass model[1, 2]. These differential equations are solved by a numerical integration schemeto generate a flightpath containing the important information such as position,velocity and angle for each time step from leaving the muzzle to the impact.
Mach Number
Air DensityHeightVDrag
CD Vel of Sound
V
Figure 1: Example for the Dependencies of integration parameter Drag.
Common integration schemes used are explicit or implicit single-step methods,such as Heun or Runge-Kutta. Due to the good conditioned DEQs faster schemeswithout error-estimation were preferred to keep computation time short. Thealgorithms described below are developed for an Euler scheme, but were alsosuccessfully tested on a Heun scheme.
During numerical integration of the trajectory parameters change, dependingon current projectile position and velocity. Atmospheric data gained frommeasurements or meteorological prognosis depends strongly on the height overground. Ballistic coefficients may depend on the Mach number, which on its partdepends on the actual speed of sound and the projectile velocity. There are manyparameters in the DEQs of motion that depend on the results of the last performedintegration step or that are linked to external data sets (e.g. fig. 1).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
154 Computational Ballistics III

2.2 Requirements for safety checks
In modern fire control software an important part is security. Therefore, awide range of tests were provided to check the interaction of a trajectory withother objects or zones. These zones can vary between traditional checks againsttrajectory-ground interaction and checks against violation of temporary no-flyzones. Today’s checks are mostly performed by perturbation mathematics and theirapplication on the trajectory [3]:Adding a perturbation on one initial condition and calculating the difference ofthe hit point allows to compute the numerical partial derivative with respect tothe initial condition perturbed. The linear combination of these partial derivativesmultiplied with their variances leads to the absolute error probability usually givenas a CEP. The mathematical background is the Gaussian law of the propagation ofthe stochastic error [4]:
σ2y =
N∑i=1
(∂f
∂xi
)2
σ2i =
(∂f
∂x1
)2
σ21 +
(∂f
∂x2
)2
σ22 +
(∂f
∂x3
)2
σ23 + · · · (1)
This approach is also suitable for crest clearance checks:Two perturbed trajectories were calculated which enclosure the original trajectory.One of this new trajectories - the lower one - is used for checking against projectile-ground-interaction. The higher one is obsolete.
Another approach is to rise the ground to a safety level needed and then checkthe original trajectory against projectile-ground-interaction using the raised groundlevel.
Both algorithms can only handle defined and fixed error budgets for a limitednumber of parameters because every parameter to be perturbed causes anadditional complete trajectory calculation. These parameters are limited to initialconditions of the numerical integration and no dependencies were taken intoconsideration.
3 A measurement approach
In measurement theory basically all measurands are error afflicted. These errors arequantified by two characteristic values: mean value of the sample (x) and standarddeviation of the sample (sx). All error afflicted measurands are assumed Gaussiandistributed.
Looking at the parameters affecting a trajectory integration, three maincategories can be differentiated:
1. Parameters directly affecting the initial conditions, such as gun position, gunheight, muzzle velocity, azimuth and elevation.
2. Parameters indirectly affecting the initial conditions, like propellanttemperature and barrel abrasion.
3. Parameters directly affecting the projectile in flight containing allatmospheric properties depending on height (temperature, air density, air
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 155

pressure, wind, speed of sound) and all projectile depending coefficients(drag, lift, Magnus and Coriolis forces, spin, yaw).
From a measurement point of view, all these parameters are error afflicted andtherefore, every parameter can be quantified by its mean and standard deviation.The aim is to get a statement for the certainty - or better uncertainty - of theprojectile’s position and velocity. The approach is to propagate the error of theposition and the velocity vector not by perturbing the initial conditions, butby recalculating the standard deviation of position and velocity vector everyintegration time step.
Figure 2: Resulting fuzzy position of a projectile.
The main advance is that a data set of projectile’s uncertainty for each point ofthe trajectory calculated is produced. Changing standard deviation of error afflictedparameters during the trajectory is possible and therefore assures a good flexibility.This computation is extraordinary fast compared to an equivalent perturbationapproach.
4 Error propagation
In general, the Gaussian Law (eqn. (1)) covers most of normal measurement cases.But because modern fire control softwares integration methods and object handlingsplits up the computation of position and velocity vector into subroutines, a moregeneral definition of the error propagation has to be used. The variances and theirdepending variables to be added at the end of the calculation cannot be assumed tobe independent anymore. To consider these dependencies the general law for errorpropagation has to be used [5]: Let f(x1, x2, . . . , xn) be a function which dependson n variables x1, x2, . . ., xn. The uncertainty of each variable is given by σxj
multiplied with the quantile for a level of confidence of α (remark, that in militaryapplications times of PE is the common quantile): If the variables are correlated,
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
156 Computational Ballistics III

the covariance between variable pairs, Ci,k := cov(xi, xk), enters eqn. (1) with adouble sum over all pairs (i, k):
σf =
√√√√ n∑i=1
n∑k=1
(∂f
∂xi
∂f
∂xkCi,k
), (2)
where ∂f∂xj
designates the partial derivative of f for the j-th variable and Ci,i =var(xi) = σ2
xi. After calculating σf , the value of the function with its uncertainty
is:
f ± uα/2σf . (3)
The estimation of the correlation matrix is discussed in section 5. Withinnumerical integration schemes error propagation does not follow this law.
4.1 Error propagation in Euler schemes
In Euler schemes every discretized equation can be written as:
xi = xi−1 + gi ∆ti, (4)
with ∆ti as the not error afflicted, but varying integration increment, gi as afunction, varying and error afflicted, that incorporates the discretized DEQ withinincrement i.
Analysis following the method described in section 5 shows that the correlationbetween xi−1 and gi is negligible. This would enforce a Gaussian errorpropagation approach. Trying this one will end up with wrong results, becausethis approach considers only the increment ∆ti ∈ [0,∆ti], but neglects the actualposition within the integration process, which would be t ∈ [0, t]. Instead an errorpropagation similar to the integration scheme used is postulated:
σxi = σxi−1 +√σ2
x0+ t2 σ2
gi−
√σ2
x0+ (t− ∆ti)
2σ2
gi(5)
In fact, the equation shown is a steady continuation of the existing error with agradient with respect to the actual integration increment.
The main advantage is to consider the whole integration time t and the initialerror. The following figures show the differences of a Gaussian and this approachfor the error in velocity and range of a constantly slowed down vehicle from30m/s with an error in v0 and in the friction co-efficient:
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 157

t in s
vin
m
v
inm
t in s
1.02
10 20 30
1.04
1.0
0
1.03
1.01
1.02
10 20 30
1.04
1.0
0
1.03
1.01
Figure 3: Resulting standard deviation of v of analytical solution (grey) and ofEuler scheme (black); Left: Gaussian law Right: New approach.
t in s
x
inm
x
inm
t in s
205
10
0 30
0
25
20
1510
30
15
20
10
5 30
30
200 2510
0
Figure 4: Resulting standard deviation of x of analytical solution (grey) and ofEuler scheme (black); Left: Gaussian law Right: New approach.
5 Estimation of correlation coefficients
For the calculation of the error propagation, the covariances between pairs ofparameters must be known. The general definition of the covariance is:
cov(X1, X2) = E(X1 ·X2) − E(X1) ·E(X2) (6)
= ρ · σ21 · σ2
2 (7)
=∫ −∞
∞
∫ −∞
∞x1 · x2f(x1, x2)dx1dx2 − E(X1) ·E(X2) (8)
with X1, X2 as variates, E(. . .) as the expectant and ρ as the the Pearsonproduct-moment correlation coefficient (PMCC). Mind that the probability densityfunction (PDF) f(x1, x2) is a bivariate Gaussian distribution with the Gaussiandistributions of each error afflicted parameter as marginal distributions. Thedifficulty to estimate the covariance of two parameters is, that the transformationof bi-variate distribution to the marginal distributions is irreversible. The bi-variate
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
158 Computational Ballistics III

Gaussian PDF is defined by 5 parameters: µx1 , µx2 , σx1 , σx2 , ρ.
f(x1, x2) =e− 1
1−ρ2
[(x1−µx1)2
2σ2x1
−ρ(x1−µx1 )(x2−µx2 )
σx1 σx2+
(x2−µx2)2
2σ2x2
]
2πσx1σx1
√1 − ρ2
(9)
The extraction of the marginal distributions is easy and like:
fx1(x1) = 1√2πσx1
e− (x1−µx1)2
2σ2x1 , fx2(x2) = 1√
2πσx2e− (x2−µx2 )2
2σ2x2 , (10)
but the reconstruction of the bivariate PDF is impossible without the definingparameter ρ [6]. The approach is to determine this PMCCs using a pseudo empiricapproach.
5.1 Pseudo-empiric correlation matrix
Although the error afflicted parameters used in fire control software arepopulations, the method to estimate the PMCC is derived from a method developedfor samples. The way to determine an empiric correlation matrix, as described in[7], is:j variates are determined in i samples. The values of the variates are
standardized by subtracting the arithmetic mean value of the variate and dividingit by the standard deviation of the variate throughout the samples.
zij =xij − xj
sj(11)
withzij : standardized value of the variate j in sample i.xj : arithmetic mean of the variate j: xj = 1
n
∑ni=1 xij .
sj : empiric standard deviation of the variate j:
sj =√
1n−1
∑ni=1
(xij − x2
j
).
This standardization results in a n ·m matrix Z:
Z =
z11 z12 · · · z1m
z21 z22 · · · z2m
...
zn1 zn2 · · · znm
(12)
The empiric correlation matrix R is then:
R =1
n− 1ZT Z (13)
The expectation value of the empiric correlation matrix R is the correlationmatrix of the population P = E(R).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 159

The approach is to generate samples out of the error afflicted equation using theconditional equations of the error afflicted parameters.
1. Each error afflicted parameter is defined as a variate.2. Each error afflicted parameter appearing in a conditional equation generates
a sample.3. A sample is generated by perturbing the parameter defined in 2. within all
conditional equations by its standard deviation σ.4. The results are standardized using the means and standard deviations of the
variate populations.The resulting matrix consists of n ·m samples z, n variates fxn , depending on
m parameters a:
Z =
z11 = fx1(a1 + σa1 , · · · , am) . . . z1m = fx1(a1, · · · , am + σam)
......
zn1 = fxn(a1 + σa1 , · · · , am) . . . znm = fxn(a1, · · · , am + σam)
The sum of each column is 1. Each sample adds the part of the PMCC generatedby the perturbed parameter. Perturbed parameters adding parts to more than onevariate cause correlations. Calculating R using eqn. (13) provides an equationfor every PMCC. The division by n − 1 drops out because the use of standarddeviation generates theoretical infinite sized samples and the resulting matrix isin fact the correlation matrix of the population P . This approach was verified andsuccessfully tested using Monte-Carlo simulations [8].
6 Example
As an example for safety testing of trajectories an artillery shell was chosen. It isfired with a quadrant elevation (QE) of 800−. The trajectory was computed using apredictor-corrector integration scheme for a modified point mass model (MPMM).Only a few parameters were considered error afflicted, such as the drag coefficient,projectile mass, QE and muzzle velocity. Using the error propagation technology,outlined here, a plot can be generated that shows the position of the projectile atany point of the trajectory on a defined level of confidence. Figure 5 shows areasof positional probability on a level of confidence of 10 PE which is equivalent to99.93 %. In the first plot elipsoids for 10 PE for range and height are given. Thesecond plot shows elipsoids for range and deflection.
For safety tests the most important information is the distance between projectileand ground measured in times of PE. Figure 6 shows on the left the trajectory andthe corresponding ground profile. On the right the times of PE are plotted togetherwith the changing safety level regarding the projectile’s traveling over own (20 PE)or foe (10 PE) ground or while approaching the target (0 PE).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
160 Computational Ballistics III

0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
no
rma
lize
dh
eig
ht
ov
er
gro
un
d
normalized range
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1
normalized range
0
0.5
1
de
fle
cti
on
no
rma
lize
d
Figure 5: Probable projectile position on a C.L. of 50 PE.
0
normalized range
dis
tan
ce
pro
jec
tile
-gro
un
din
PE
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
70
80
90
100
0
10
20
30
40
50
60
6000
7000
4000
5000
2000
3000
0
1000
-1000
0
-2000
0
normalized range
0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9
hei
gh
tin
m
Figure 6: Safety in Crest checking in times of PE.
7 Conclusions
The technology of error propagation outlined in this paper is a new approachin calculating PEs. The current technology of overall numerical derivation withrespect to some parameters is replaced by an analytical derivation with respect toall parameters and performed within each integration time step. This allows thechange of standard deviation throughout the flightpath of the projectile.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 161

A new method for the propagation of error afflicted parameters within first andsecond order numerical integration schemes has been developed and successfullytested. The correlation between parameters assumed error afflicted has beendetermined using a new quasi empiric approach. The resulting PMCC matricesvary throughout the flightpath and can be recalculated every integration time step.
In result, flightpath data with information about error probability for positionand velocity for each integration time step is given. Calculation of the probableerror at the target is done automatically and with good accuracy even for deflection,that was determined empirical before. Safety testing against trajectory - groundinteraction can be performed on a high level of flexibility by changing safetyquantiles during the flight. Checks against no-fly zones now can be performedby a fraction of the effort formerly necessary.
The usage of the technology outlined is not restricted to trajectory calculation,but offers the opportunities for many other branches using time critical numericalinitial value solvers.
References
[1] NATO, STANAG 4355 - The Modified Point Mass and five Degrees of FreedomTrajectory Models. 4th edition, 2006.
[2] McCoy, R.L., Modern Exterior Ballistics. Schiffer Military History: Atglen,1999.
[3] Molitz, R., Hellmuth; Strobel, Außere Ballistik. Springer: Berlin, 1963.[4] Adunka, F., Meßunsicherheiten - Theorie und Praxis. Vulkan-Verlag: Essen,
2000.[5] Irle, A., Wahrscheinlichkeitstheorie und Statistik. Teubner: Stuttgart, Leipzig,
Wiesbaden, 2001.[6] Cook, S., R. Dennis; Weisberg, Applied Regression including Computing and
Graphics. Wiley: New York, 1999.[7] Eckey, R.R.M., Hans-Friedrich; Kosfeld, Mulitvariate Statistik: Grundlagen -
Methoden - Beispiele. Gabler: Wiesbaden, 1st edition, 2002.[8] Kuhrt, A., Crest Clearance und ACA Check Technologie fur numerische
Flugbahnberechnungen - Theoretische Grundlagen. Research Report:Hamburg, 2007.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
162 Computational Ballistics III

Scalable parallel computation of explosively formed penetrators (EFPs)
E. L. Baker, C. Chin, B. E. Fuchs & J. Pham Energetics and Warheads Division, U.S. Army, ARDEC, Picatinnyl, NJ, USA
Abstract
Under the DoD High Performance Computer Modernization Program, the ARDEC Energetics and Warheads Division has successfully developed and demonstrated scalable parallel warhead mechanics modeling of an advanced explosively formed penetrator (EFP) warhead device. Warhead development commonly uses advanced computer modeling which can take extreme amounts of computer time. The recent application of scalable parallel computers has demonstrated the capability to achieve approximately a 120 times speed-up of EFP warhead modeling. Speed-ups were demonstrated using modeling of a copper lined EFP anti-armor warhead using the PCTH computer program on a number of multiple processor computers including a 256 node IBM SP2, 128 node Silicon Graphics Origin 2000 and smaller multiple processor Silicon Graphics workstations. This pioneering work clearly demonstrates the feasibility of applying parallel computers for warheads development. Keywords: explosively formed penetrator, scalable computing, parallel computing.
1 Background
Continuum simulation of high rate explosive applications using finite element, finite difference and discrete particle methodologies have received considerable attention since the advent of digital computers (Von Neumann and Richtmyer [1], Mader [2], Wilkins [3]). Explicit high rate continuum simulation is extremely computationally intensive. As a result, less computationally demanding analytic models of high explosive systems have been widely developed and used (Baker [4], Yates et al [5]). However, analytic models rely
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 163
doi:10.2495/CBAL070151

on many simplifying approximations and empirical relationships. Continuum modeling techniques allow the inclusion of advanced material descriptions and attempt to simulate detailed distributed material responses. The resolution of detailed wave dynamics and highly path dependant nonlinear material response are often very important aspects of high explosive application simulations that simply cannot be reasonably approximated using simplified analytic modeling. As computational capabilities have progressed, so has the application of continuum simulations of high explosive applications including shaped charge and explosively formed penetrator (EFP) warheads.
2 Warheads modeling
Previous efforts have demonstrated the successful application of explicit high rate finite difference and finite element computer modeling to the simulation and design of shaped charges (Baker and Campbell [6]) and EFPs (Baker and Liu [7], Fong et al [8]). This modeling has been primarily axisymmetric, as the initial geometries are often axisymmetric. Figure 1 presents an axisymmetric shaped charge simulation calculated using CALE. Figure 2 presents an axisymmetric EFP simulation calculated using DYNA2D. CALE (Tipton [9]) is an arbitrary Lagrangian Eulerian finite difference program. DYNA2D (Hallquist [10]) is a Lagrangian finite element program.
10µs
0µs
20µs
30µs
60µs
Explosive
SlugJet
Figure 1: Axisymmetric shaped charge simulation.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
164 Computational Ballistics III

DYNA2D
X-RAY
Figure 2: Axisymmetric EFP simulation and experimental flash x-ray.
The liner collapse and jet formation of axisymmetric shaped charges are normally considered to be a primarily axisymmetric event. In contrast, the folding of an EFP liner into a desirable projectile geometry is inherently three dimensional, as the liner normally buckles during the folding process. This buckling behavior results in a final projectile configuration with buckling at the rear flare section. This means that accurate modeling of EFP warheads should include full three dimensional continuum simulation. Three dimensional continuum simulation is at least an order of magnitude more intensive than two dimensional simulation. As a result, full three dimensional explicit continuum simulation requires considerable computer resources. In particular, Eulerian finite difference modeling has historically been extremely computationally intensive, but often required in order to resolve highly distorted geometries or eroding material that cannot be resolved using traditional Lagrangian methodologies.
3 Scalable software
Under the DoD High Performance Computer Modernization Program, Common High Performance Computing Software Support Initiative (CHSSI) a scalable parallel version of the CTH Eulerian high rate finite difference program (McGlaun et al [11]) was developed. This scalable software suite is for the simulation of multidimensional, multi-material, large deformation, strong shock wave propagation problems in solid mechanics. As a part of this development, the ARDEC Energetics and Warheads Division is assessing the performance and feasibility of performing parallel modeling for the design and development of warheads technology. A part of this assessment includes benchmarking of warheads demonstration calculations.
4 Scalable EFP calculations
The ARDEC Energetics and Warheads Division has a long history of warheads design and technology development. A part of that technology development includes EFP warheads. As a result, a number of baseline EFP designs have
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 165

been developed for general investigations and applications. One of these baseline designs was used for a computational comparison to assess the performance and feasibility of performing parallel EFP modeling for the development of warheads technology. This relatively conservative copper lined EFP warhead produces a final projectile with length to diameter ratio of about three. A demonstration calculation was run on the 128 node U.S. Army ARL Silicon Graphics Origin 2000 and the 256 node U.S. Air Force Aeronautical Systems Center IBM SP2. Figure 3 presents a visualization of the three dimensional EFP simulation. The three dimensional liner buckling is clearly evident during the formation of the projectile flare. The flare is desirable for aerodynamic stability of the projectile. In addition, the liner edge erosion material process is clearly evident. Figure 4 presents the three dimensional EFP simulation final shape. The final buckling of the flare region is clearly evident. Figure 5 presents an experimental streak photograph of the EFP taken at the ARDEC small scale test area. The experimental result clearly shows the three dimensional buckling on the projectile flare, as well as the erosion material debris. The simulation agreement to experiment is excellent.
5 Computational performance
Run time comparison using varied number of CPUs was conducted for scalable computational performance benchmarking. Although the simulation was run to completion on both the Silicon Graphics Origin 2000 and the IBM SP2, the benchmarking was done with a shorter run time in order conserve computer time. The calculated speed-ups on the Silicon Graphics Origin 2000 are presented on Table 1. The calculated speed-ups on the IBM SP2 are presented on Table 2. Based on the results, both machines can be expected to achieve computational speed-ups of about 120 times using 1024 processors. This is a considerable increase, as current warheads calculations are typically completed at ARDEC using a single processor of a Silicon Graphics Origin server using the same processor and processor speed as the ASC Origin 2000.
Table 1: Scalable computational speed-up comparison for the Silicon Graphics Origin 2000.
Silicon Graphics Origin 2000 # CPUs Speed Up
1 1.0 4 1.5 8 2.1
32 5.6 1024 119.5*
*=Projected
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
166 Computational Ballistics III

20µs
0µs
50µs
100µs
200µs
Figure 3: Three dimensional EFP simulation.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 167

Figure 4: Three dimensional EFP simulation final projectile shape.
Figure 5: Experimental streak photograph of the same EFP.
Table 2: Scalable computational speed-up comparison for the IBM SP2.
IBM SP2 # CPUs Speed Up
1 1.0 8 1.1
16 2.0 32 3.9
1024 121.7* *=Projected
Cu, V=2Km/s
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
168 Computational Ballistics III

6 Conclusions
The ARDEC Energetics and Warheads Division have successfully developed and demonstrated scalable parallel warhead mechanics modeling of an advanced EFP using the scalable parallel CTH computer program. This recent application of scalable parallel computers has demonstrated approximately that a 120 times computational speed-up would be expected in a 1024 node machine using the current scalable CTH software on either a Silicon Graphics Origin 2000 or an IBM SP2. This pioneering work clearly demonstrates the feasibility of applying parallel computers for warheads development. Ongoing efforts are concentrating on modeling of highly computationally intensive continuum simulation of three dimensional shaped charge behavior.
Acknowledgement
This work was supported in part by a grant of HPC time from the DoD HPC Centers.
References
[1] Von Neumann, J. and R.D. Richtmyer. 1950. J. Appl. Phys. 21, 232. [2] Mader, C.L. 1964. “The Two-Dimensional Hydrodynamic Hot Spot.”
Los Alamos Scientific Laboratory report LA-3077. [3] Wilkins, M.L. 1965. “The Use of One- and Two-Dimensional
Hydrodynamic Machine Calculations in High Explosive Research.” Proceedings of the Fourth Symposium (International) on Detonation, Naval Ordnance Laboratory, White Oak, Silver Spring, MD (October).
[4] Baker, E.L. 1991. “An Application of Parametric Optimization to Analytical Shaped Charge Modeling.” Proceedings of the SCS 1991 Eastern Multiconference, Ballistics Conference, New Orleans, LA (April).
[5] Yates, J.E., M.E. Majerus and R.E. Brown. 1995. “A Panel Code Model of the Shaped Charge Liner Collapse Process.” Proceedings of the 15th International Symposium on Ballistics, Jerusalem, Israel (May).
[6] Baker, E.L. and R. Campbell. 1993. “Optimized Wave Shaping of a Molybdenum Conical Lined Shaped Charge.” Proceedings of the SCS 1993 Eastern Multiconference, Ballistics Conference, Arlington, Va., pp. 3-6 (March).
[7] Baker, E.L., and Liu, A.Y. 1995. “Numerical Optimization of Tantalum Material Properties for Two-Dimensional Lagrangian Modeling of a TNAZ Loaded EFP.” Proceedings of the 6th TACOM Combat Vehicle Survivability Symposium, Monterey, CA (March).
[8] Fong, R., B. Rice and W. Ng. 1998. “Hydrocode 3D Simulation of Non-AxiSymmetric (NAS) Explosively Formed Penetrator (EFP) Warhead.” Proceedings of the 17th International Symposium on Ballistics, Midrand, South Africa (March).
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 169

[9] Tipton, R. 1991. “CALE User's Manual.” CALE Documentation, Lawrence Livermore National Laboratory, Livermore, CA, (July).
[10] Hallquist, J.O. 1984. “User’s Manual for DYNA2D -- An Explicit Two-Dimensional Hydrodynamic Finite Element Code with Interactive Rezoning.” Lawrence Livermore National Laboratory Report UCID-18756, Rev. 2.
[11] McGlaun, J.M., Thompson, S.L., and Elrick, M.G. 1990. “CTH: A Three-Dimensional Shock Wave Physics Code.” Int. J. Impact Engineering, Vol. 10, pp. 351-360.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
170 Computational Ballistics III

Data mining in military systems
A. A. Motta1, A. S. Alves1 & N. F. F. Ebecken2 1Brazilian Navy Research Institute, Rio de Janeiro, Brazil 2Federal University of Rio de Janeiro, Rio de Janeiro, Brazil
Abstract
The discovery of knowledge in databases has gained great importance and interest in recent years, especially in strategical areas where the access to the information is restricted many times. There has been a substantial growth in the amount of stored information in digital media, mainly due to its increasing easiness and cost reduction. However, the large amount of stored data becomes impracticable for specialists to analyze through conventional methods. The difficulty for a more accurate analysis of these data means they may become accumulated useless information. On the other hand, it is known that in large amounts of data an enormous potential of extractable information can exist. This work presents the application of a data mining tool in military databases. A case study is shown where the mining of rules of association and classification capable of finding useful information for the improvement of an anti-missile system in ships was carried out. The results show that the methodology reached its main objectives, that is, rules were generated from large databases. However, it is important to remember that the generation of these rules represents only the initial stage of the system improvement with the use of data mining. Keywords: data mining, association rules, classification rules, anti-missile systems, chaff.
1 Introduction
The finding of new knowledge from a mass of operational data is only possible if it is analyzed in a joint form. The large amount of stored data can make it impracticable for specialists to analyze them through conventional methods.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 171
doi:10.2495/CBAL070161

Moreover, difficulty for a more accurate analysis means that this data is transformed into an accumulation of information without utility, even though it is known that there might be a great potential of information in it. The majority of data mining tasks, in special classification and association rules mining, suffers from strong restrictions in its implementation due the diverse factors, like, among others, the iterative character of the mining algorithms, allied to the often very large amount of data available, that limit the hardware platforms where these can be processed. Although the generality of the majority of the algorithms developed for mining tasks of classification and association rules, it is evident that the more robust and efficient implementations are those where it is taken into account not only the available hardware, the knowledge of the data and its nature [1]. Therefore, it is believed that the biggest motivation for implementations of data mining tools for specific applications inhabits in the fact of getting greater domain of the system, thus facilitating future adaptations and additions of functionalities, as they show necessary. Data mining systems can be used in military applications as described by Cantoni et al [2]. This technique can be especially important for electronic countermeasures (ECM) development, where the knowledge of a certain threat parameters, for which the countermeasure will be developed, is sometimes very limited. Then, the use of techniques and systems of data mining can provide important information that can contribute for the development effectiveness. Amongst the ECM used for ships to defend themselves from fire-and-forget anti-ships missiles, it is the employment of chaff rockets, as described by Vakin et al [3]. Chaff rockets are rockets loaded with of metallized filaments that, once in suspension in the atmosphere, form a radar-reflective cloud that provide a target with the intention to confuse or seduce the missile, as illustrated in figure 1 [4].
Figure 1: Shunting line of route of the missile for cloud action of chaff.
Chaff clouds must be formed in key position so that incoming missiles are deviated. For this to be accomplished, a chaff rockets launching system must exist that determines, through the analysis of diverse parameters, the position, the load opening time, and the amount of rockets necessary to deviate the missile. The biggest difficulty in this type of countermeasure system development is the lack of necessary specific threat information, normally kept
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
172 Computational Ballistics III

secret. Thus, the mining of data of tactical scenarios involving adverse conditions and different threats behaviors, meteorological conditions and ships parameters can lead to the discovery of important information, hopefully useful to improve the ECM systems. The computational data analysis possibilities, combined to military applications restrictions, has been the main motivation for the use of data mining tools to search new knowledge for the anti-missile systems improvement. The application of data mining tasks can be extended to other military systems as well, for, where there is data collected, certainly exists useful implicit information. The remaining of this work is organized of the following form: section 2 presents the anti-missile system description, with its parameters and tactical operation modes; section 3 presents a brief conceptualization of classification and association rules; section 4 describes as the mining of data is applied to the systems databases and how it can contribute to their improvement; section 5 shows some experiments and results; and, finally, section 6 presents the final considerations.
2 Chaff ECM systems
The mission of an anti-missile ECM system is to defend a ship against missile attacks. In the case of radar-guided missiles, one possible countermeasure is the coordinated launching of chaff rockets. There are several other types of ECM available, but this work will be restricted to chaff employment.
2.1 Tactical employment modes
To defend a surface ship against a radar-guided anti-ship missile, a chaff countermeasure system can, according to a tactical software or a pre-generated table, produce fire solutions that will depend on the ship behavior, meteorological data, rocket launchers to be assigned, number and type of rockets to be launched from each launcher, and chaff load release time, among other factors, so that the seduction, distraction, or confusion defensive modes are applied to deviate the incoming missile.
2.1.1 Seduction Seduction is the tactical mode in which action is taken in the moment that the missile acquires the target, in the accompaniment phase, also called final guidance phase. It can also be used against fire control radars to break their accompaniment. There are two types of seduction usually applied in these ECM systems: centroid displacement seduction and accompaniment window displacement (DUMP) seduction [5]. In centroid displacement seduction, chaff cloud(s) is(are), with bigger radar cross-section than the ship, formed at close distance(s) from the ship, to form a single initial radar echo that includes the ship and then, relatively, moves away from it, seducing the missile guidance radar. This mode often demands ship to maneuver to dislocate the centroid.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 173

In DUMP seduction, a coordinated action is carried by radar tricking equipment and chaff rockets. Initially, a calculated radar signal is emitted to dislocate the displacement window, the direction, or both, of the missile guidance radar, producing a fake position, whilst chaff rockets are launched, with the lesser reaction time, in this fake position area to create a cloud that will be assumed as the target to be pursued by the missile. For this to work, a precise choice and programming of the chaff rockets is necessary, combined with an efficient evasive maneuver to move the ship as far as possible from that area.
2.1.2 Distraction This tactical way is efficient only during the search phase of the missile guidance radar. It consists of launching a series of chaff rockets in accordance with optimized patterns for each threat type, presetted in the system, that will offer to the missile guidance radar a great number of fake targets available, with a high probability for it to acquire one of these fake targets instead of the ship, initiating its final attack phase against it.
2.1.3 Confusion Tactical mode characterized by acting before a missile is launched. Its objective is to generate fake targets, confusing the enemy surveillance system and thus making it difficult to assign a target. The chaff cloud role in this mode demands their placement at the distances up to 10 km from the unit to be protected.
2.2 System requirements
In order to be possible to ECM systems to perform one or more countermeasure modes, they must comply with certain requirements. The same is observed to the ammunition, the chaff rockets. These systems present some intrinsic characteristics that determine and limit their applicability. Amongst others, the main characteristics are: the number of rocket launchers and their relative alignment with respect to the ship; the number of simultaneously launchable rockets per launcher; the rise angle for fixed launchers or, in the case of mobile launchers, the boundary-values of training and rise; the amount of simultaneous launchings; the reaction time between the threat detection and the chaff rockets launching; the time interval between launchings from the same launcher; and the ammunition characteristics (since the amount of chaff load, cloud opening time, the rocket range, among others characteristics, have a significant role in the system performance).
3 Data mining tasks
Amongst the diverse research areas in the data mining, one of most important and that has received much dedication is the mining of frequent items (or Frequent Items Mining, FIM) [6]. FIM is the search of subgroups that appear, with certain frequency, in a data mass, and it appears as main subproblem in other data mining tasks of great relevance, such as association and classification rules mining, stated that rules are the most expressive and intelligible forms of human knowledge [7–9].
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
174 Computational Ballistics III

3.1 Association rules
According to Liu et al [10], “association rule mining finds all the rules existing in the database that satisfy some minimum support and minimum confidence constraints”. They represent standards where the occurrence of events in a set is high [6]. It can be said that it is the probability of a set of items to appear in a transaction, given that another set is present. An association rule is an implication of form R: X⇒Y, where X, the antecedent, and Y, the consequence, are subsets of disjoint items. The support of a rule R in a database D is defined as sup(X ∪ Y). Thus, such rule can be understood as a prediction, since if a transaction T supports X, it will also support Y, with certain probability, which is called rule reliability and denoted as conf (R):
( ) ( ) ( )( )
( )( )X
YXTXP
TXTYPsup
supT X | T Y PRconf
∪=
⊆⊆∧⊆
=⊆⊆= (1)
The confidence of a rule discloses how much this rule is applicable, whereas its support indicates how much this rule is trustworthy. Therefore, for a rule to be relevant, it is necessary to have sufficient support and confidence, and it is said that a rule is relevant or strong if its support and confidence are above some predetermined minimum values [7].
3.2 Classification rules
According to Liu et al [10],”classification rule mining aims to discover a small set of rules in the database that forms an accurate classifier”. It is the process of class prediction for records present in a database. Considering a standard as a set of attribute values, a classification rule is the implication of a standard with a class. It must be capable of making a record prediction depending on if its antecedent is a subset of this record. A rules-based classifier is composed of a set of rules set ordered by some anteriority norm and a standard class (its default). The problem of classification involves the discovery of relationships (or dependences) between class variables other variables, using such relationships to classify unknown cases. These relationships are stored as classification models, in form of rules [10, 11].
4 Data mining employment in ECM
ECM systems possess specialized software responsible for the execution of its tactical modes. This tactical software receives, from the others systems and sensors in the ship, the necessary parameters for the scenario creation, or threat instancing. From the interpretation of this scenario, the tactical mode designated, ammunition availability, and the status of the system units, the software calculates a solution that consists, basically, of the selection of the number of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 175

chaff rockets to be launched from each launcher and the opening time of the loads (or fuze temporization for each rocket). There might have cases in which, due to reaction time requirements, lack of available ammunition in one or more launchers, or even other diverse failures, it is not possible to calculate or to execute a solution, and, for these cases, these systems are endowed with tables (look-up tables) composed of diverse tactical scenarios with their respective standard solutions, representing an alternate way to find a possible defensive solution. Computer simulation is intensively used to validate to tactical software and to elaborate the look-up tables.
4.1 Data simulation
Simulation is a fast and non-expensive method to test a system behavior. However, it suffers from an important limitation: the validity of the employed models. It is extremely difficult to model any complex system, its difficulty growing with its complexity, and it must be established a commitment between accuracy and feasibility. The simulator that generates the data to be used by the countermeasure system simulates the attack of a missile against a ship, in which the attacking missile radar tracks the target, while the ship searches to defend herself from the incoming threat through the use of chaff rockets. For that, diverse factors are considered, including surrounding meteorological data; missile-target geometry; attacking missile characteristics (e.g., physical, aerodynamical, sensors, and control system); own ship characteristics (e.g., physical, electromagnetic, hydrodynamic, propulsion and maneuver systems); countermeasure system characteristics (e.g., launchers type and positioning in the ship, launching control system); rockets characteristics (e.g., physical, aerodynamics, propulsion); and rockets payload characteristics (e.g., physical, electromagnetic, aerodynamics). The modeling of the entities that composes the simulation environment is the great challenge in the simulation process, because, to ensure useful results, it is necessary to well model these entities (e.g., own ship, threat, chaff cloud, etc). For this, some usually unavailable data are necessary, such as the ship radar cross-section for all possible angles and the exact characteristics of the threat search radar, among others.
4.2 Data mining contributions
Considering the limitations of simulation and the amount of involved variables in the problem, it is easy to conclude that any analysis for simple data inspection hardly leads to some type of contribution, what motivates the application of data mining tasks in this problem. Diverse data mining data can be applied to simulation results and contribute, somehow, for the countermeasures systems improvement. In this work, association and classification rules are applied to improve the survivability chances of a ship equipped with a chaff system under attack by an anti-ship missile.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
176 Computational Ballistics III

4.2.1 Association rules mining Association rules constitute a tool of non-supervised computational learning. It is based on observations and discoveries, searching for occurrences of standards, trends and generalizations in the data mass without user intervention and the application of this task can lead to surprising discoveries. Its most immediate application in the current problem (launching of chaff rockets to defense a ship under an anti-ship missile attack) is the use of the mined information as an evaluation instrument for the simulation outcome. They can disclose, for instance, that a solution or even a simulation behavior associated to events characterize a wrong trend of a model, showing that the model must be reviewed and corrected or improved and that certain assumptions might not be applicable, what can improve the ECM system effectiveness, since the data are used to produce a defensive solution or an entry in the look-up table. Association rules can also reveal occult characteristics in the problem (such as, for instance, unnoticed details regarding the missile search pattern) that can contribute not only to improve the defense system, but lead to tactical or doctrine re-evaluation on chaff employment. In addition, based in the knowledge of the available data, some user interventions can be applied, like the use of some type of hierarchy between the records, and possibly leading to other useful discoveries. Association rules can be used to create parameters to help to understand threats behavior, to identify affinities between solutions and tactical scenarios, to foresee solutions for new scenarios, to perform behavior analysis for fault detection, etc, demonstrating that their use in such databases can contribute for the ECM systems improvement, and that the application possibilities are innumerable.
4.2.2 Classification rules mining Liu et al [10] showed that it is possible to integrate association and classification rules mining, so that it is possible, starting from association rules, to perform classification tasks implementing a few algorithm changes that will allow the employment of both mining rules without performance loss. It must be pointed, however, that classification is a supervised method, that is, it is learned with the use of examples, being applied for prediction. In this work, classification of tactical scenarios was applied in classes of defense sectors. The area near the ship is divided in sectors in accordance with the launcher to be used in a scenario solution, so that, in ships equipped with four launchers, four classes were created. Neglecting the combined solutions (those where the use of more than one launcher for the defense of the ship is necessary), the result of the analysis of this process can be used, for instance, in the reloading politics procedure for situations where there is not plenty of ammunition available. There are instances of the problem (scenarios) for which it is not possible to find a solution, and the grouping of these instances in two classes (with solution and without solution) can help in the chaff rockets application doctrines development. In addition, a real time scenario classification can allow the ship to
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 177

engage in other defense method. Other parameters can be used for the scenarios separation in classes, such as, for instance, the necessity or not of maneuvering by the ship. Even in cases for which missiles do not directly hit the target, nearby explosions often cause expense damage to the ship systems, especially in the detection and communications antennas. Like the association mining rules, classification mining rules can collaborate for the ECM systems improvement and its use doctrine.
5 Case of study and speed up
One of the biggest challenges in the mining rules tasks use is the algorithm implementation. Due to their iterativity aspect, to the great number of generated combinations, and mainly the usually very large size of the databases, implementations must be constructed carefully, using optimized data structures so that computational costs do not make them unfeasible. A tool has been developed in C programming language, capable of effective execution of the rules generation task for application in the databases generated for a chaff rockets employment environment simulator. Its initial task is a data pre-processing, carried through the databases produced by the simulator, in which this data is converted to a proper format, suitable for the mining tasks implementations, some parameters discretization, data cleanness, ordering, and attributes choice. The produced databases did not present a priori problems for the serial mining rules tasks execution (in one machine). After verification that the rules were being correctly mined and to ensure that a reduced set of classification rules was extracted, as suggested by Liu et al [11], a parallel version was developed, to reduce to overall consumed time with direct impact in its feasibility. The experiments were carried in a PC cluster with 16 Pentium IV HT 2.8GHz with 1GB of RAM computers, 8 Pentium IV 2.4GHz with 1GB of RAM computers, and 16 AMD Dual-Core Opteron with 2GB of RAM. In the executions, the node selection was intentionally set as automatic, so that there is no identification of the used processors in each run. The implementation includes the development of a parallel implementation of CBA algorithm [11], including associations-based classification – successfully strategy already in use in serial implementations. Figure 2 shows the speed up obtained with the use of up to 10 processors and databases varying from small to large sizes. It can be observed that, as the database size increases, the speed up approaches the theoretical value. Due to confidentiality issues, it is not possible to disclosure further details regarding the database. It is important to point out that, in very dense databases, there is a risk of combinatory explosion in association or classification rules mining applications, making its usage impracticable quite often. However, the results showed that the methodology worked fine, being possible to extract rules from the experimental databases and that, from the results of the speed up study, there is an indication that its application in bigger databases is not only possible, but feasible.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
178 Computational Ballistics III

Figure 2: Speed up according to the number of processors for databases with various numbers of records.
6 Final remarks
The association or classification rules mining from simulated databases represents the initial stage of this work. For the attainment of results that come to effectively contribute for the ECM systems improvement, it is necessary to give continuity to the work. It is necessary to establish more precisely the parameters of minimum support and minimum confidence, which directly influence the methodology effectiveness. Very high values of minimum support can prevent the mining of important rules or reduce too much the classifier precision. Thus, after tuning the rules generator tool, it will be necessary to perform an analysis of the disclosed information by the data mining tasks so that the new knowledge can be added to the application. In addition, it is possible to include tasks execution improvements, such as data hierarquization or the inclusion of other data mining tasks, among others, extending, in this way, the possibilities of discovery of new knowledge in this area of application. Finally, this work introduces the application of data mining tasks with the purpose to improve anti-missile systems for ships. However, the methodology is not restricted to the present case study, rather non-military problems can also benefit from this methodology, and the methodology just needs to be applied to other individual problems.
References
[1] Adamo J-M., Data Mining for Association Rules and Sequential Patterns: Sequential and Parallel Algorithms, Springer, New York, pp 66-74, USA 2000.
Speed Up According to the Number of Processorsfor Databases with Various Number of Records
0
2
4
6
8
10
1 2 3 4 5 6 7 8 9 10
Number of Processors
Spee
d U
P
Theoretical 2558 20463 61387 83204 94949
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 179

[2] Cantoni V., Lombardi L., Lombardi P., Challenges for Data Mining in Distributed Sensor Networks. In The 18th International Conference on Pattern Recognition. Proc. of the ICPR'06, pages 1000-1007, China, Hong Kong, August 2006.
[3] Vakin S. A., Shustov L. N. & Dunwell R. H., Fundamentals of Electronic Warfare. Artech House, INC. Norwood, MA, USA 2001.
[4] http://en.wikipedia.org/wiki/Chaff_%28radar_countermeasure%29, last accessed on January 30, 2007.
[5] http://www.sew-lexicon.com, last accessed on January 30, 2007. [6] Agrawal R, Imielinski T. & Srikant R., Mining Association Rules between
Sets of Items in Large Databases, Proc. of the ACM SIGMOD Intl. Conf. on Management of Data, pages 207–216, Washington, USA, 1993.
[7] Agrawal R., Mannila H., Srikant R., Toivonen H. & Verkamo A. I., Fast discovery of association rules. In U. M. Fayyad, G. Piatetsky-Shapiro, P. Smyth, and R. Uthurusamy, editors, Fayyad U. and et al, 1995.
[8] Agrawal R. & Srikant R. Mining sequential patterns. In Proc. 11th Int. Conf. Data Engineering, ICDE, pages 3–14. IEEE Press, 1995.
[9] Beeferman D., BERGER A., & LAFFERTY J. Statistical models for text segmentation. Machine Learning, 34(1-3):177.210, 1999.
[10] Liu B., Hsu W., & Ma Y.. Integrating classification and association rule mining. In Proceedings of the Fourth International Conference on Knowledge Discovery and Data Mining (KDD-98), pages 27–31, 1998.
[11] Liu B., Ma Y., & Wong C. Improving an association rule based classifier. In 4th European Conference on Principles and Practice of Knowledge Discovery in Databases PKDD, pages 504–509, 2000.
[12] Girish K., Palshikar A, Mandar S., Kale B & Manoj M., Association rules mining using heavy itemsets, In Tata Research Development and Design Centre, Engineering and Industrial Services, Tata Consultancy Services Ltd., Pune 411001, India, 2006.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
180 Computational Ballistics III

Computer simulated fragmentation arena test for assessing lethality and safety separation distances of explosive fragmentation ammunitions
V. M. Gold, E. L. Baker & J. M. Pincay U.S. Army RDEC-ARDEC, AMSRD-AAR-AEE-W, Picatinny Arsenal,
Abstract
A combined analytical and experimental technique for determining explosive fragmentation ammunition safe separation distance and lethality without costly arena fragmentation tests is presented. The new methodology integrates high-strain high-strain-rate computer modelling with semi-empirical analytical fragmentation modelling and experimentation, offering warhead designers and ammunition developers more ammunition performance information for less money spent. The new method provides more detailed and accurate warhead fragmentation data for ammunition safe separation distance analysis, as compared to the traditional fragmentation arena testing approach. Keywords: fragmentation modelling, fragmentation arena test, lethality, safety separation distance.
1 Introduction
This paper reports on a combined analytical and experimental technique for determining explosive fragmentation ammunition safe separation distances and lethality without costly arena fragmentation tests, offering warhead designers and ammunition developers more ammunition performance information for less money spent. Since the main objective of the developed procedure is to simulate the “data output” (i.e. warhead fragmentation performance information) from traditional fragmentation arena tests, a brief description of the fragmentation arena test methodology is given for completeness.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 181
doi:10.2495/CBAL070171
NJ, USA

Basic principles and requirements governing fragmentation arena test procedures in the U.S.A. are stipulated in Joint Munition Effectiveness Manual [1]. In a typical fragmentation arena test set-up, tested munitions are positioned at the origin of the reference polar coordinate system and surrounded with series of velocity-measuring screens and fragment-catching witness panels, all at significant distances from the warhead. Defining the longitudinal axis of the munition as the polar axis z, the polar altitudinal angles Θ are measured from the munition’s nose (Θ=0°) to the tail (Θ=180°), and the azimuthal angles φ are measured from an arbitrary projectile’s feature (φ=0°) in a counterclockwise direction. In conventional fragmentation arena test procedures fragment sampling and fragment velocity measuring is usually limited to relatively small azimuthal sections, mainly because of enormous construction and data assessment costs associated with recovering fragments from the entire fragmenting shell. This sampling technique requires the assumption of isotropic fragmentation properties for all azimuthal angles φ throughout the entire Θ-angle zone (i.e. a complete altitudinal region bounded by two polar angles). By sampling small azimuthal angles across all polar zones from the munition nose to tail and adjusting this sample data mathematically, a prediction for entire munition fragment characterization is obtained. Since only a small azimuthal section of the region is sampled and scaled up, even relatively small munition positioning errors may result in large deviations of the fragmentation data, routinely requiring repeated testing for statistical data stability. In this work, the assessment of the ammunition fragmentation parameters was performed analytically employing the PAFRAG (Picatinny Arsenal Fragmentation) code which links three-dimensional axial symmetric high-strain high-strain-rate continuum analyses with a phenomenological fragmentation model validated through a series of experiments including flash radiography, Celotex™ and water test rear fragments recovery, and sawdust total fragment spray recovery. In fragmentation arena tests, the ammunition fragmentation characteristics are assessed as functions of polar angles Θ identifying angular positions of fragment-catching witness panels and velocity-measuring screens. In PAFRAG code analyses, positions of these devices are irrelevant, and the fragmentation characteristics are assessed in reference to the fragment trajectory angles Θ' calculated from the CALE code [2] cell velocities at the time of the shell break-up. Once the shell breaks up and fragments are formed, fragment velocities may change with time due to a number of reasons, including the air drag and the rigid body motion induced at the time of the shell break up. Assuming that the fragment trajectory angles Θ do not change with time (that is the rigid body motion and the lateral drift of fragments due to air resistance is relatively small) and that the definitions of angles Θ and Θ' are approximately identical, the PAFRAG model enables prediction of crucial characteristics of explosive fragmenting munitions including the number of fragments, the fragment size distribution, and the average fragment velocities.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
182 Computational Ballistics III

2 PAFRAG modelling
Similarly to fragmentation arena test fragment sampling assumptions, the PAFRAG fragmentation model assumes that for any point within a fixed Θ-angle zone the fragment number distribution Nj(m) is uniform and independent of the altitude and the azimuth angles Θ and φ, respectively. Hence, the total fragment number distribution is given by
( ) .)(∑=L
jj mNmN (1)
In equation (1) m is the fragment mass, L is the number of altitudinal Θ-angle zones, 0≤Θ≤π, and Nj(m) is the fragment number distribution function for the j-th zone. For convenience, all Θ-zones are assumed to have the same altitudinal lengths of ∆Θ=π/(L-1), except for the first and the last “half-length” zones with lengths of ½∆Θ. In the fragmentation ammunition arena testing practice adopted at the US Army Armament Research Development and Engineering Center, the number altitudinal zones is usually L=37, resulting in uniform Θ-angle resolution of ∆Θ=5°. Accordingly, the Θ-zones are identified by the middle of the zone altitudinal angles jΘ given by the following series
=∆Θ−−≤≤−∆Θ
=∆Θ=Θ
.,,12),1(
,1,
41
41
LjLjj
j
j
π
(2)
In the case of traditional fragmentation arena testing, all individual fragment number distribution functions Nj(m) for all polar Θ-zones are determined directly from the test data. The main drawback of this approach is the extremely high testing costs limiting the fragmentation arena testing to final ammunition fragmentation characterization. Alternatively, the PAFRAG modeling and experimentation is a relatively low-cost procedure enabling accurate assessment of the fragmenting munition performance at the research, design, and development phases. In the PAFRAG approach the individual Θ-zone fragment number distribution functions Nj(m) are computed analytically from the sawdust or water tank fragment recovery test data, N(m). Mathematically, the PAFRAG fragmentation modeling is a solution of the inverse problem of equation (1), i.e. determining a series of individual Nj(m)’s for given N(m). Since with PAFRAG approach, the N(m) function is assessed based on approximately 98-99% fragment recovery data, the accuracy of PAFRAG predictions is high. Figure 1 shows results of high-strain high-strain-rate CALE modeling and flash radiographic images of a representative natural fragmentation warhead at 30 and 50 µs, and at 300 and 500 µs after detonation. Upon initiation of the high explosive, rapid expansion of high-pressure high-velocity detonation products results in high-strain high-strain-rate dilation of the hardened fragmenting steel shell, which eventually ruptures generating a “spray” of high-velocity steel
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 183

fragments. As shown in the model, the rear end of the warhead has a cylindrical cavity for the projectile tracer material. Following the expansion of the detonation products, the tracer holder fractures and the resulting fragments are projected in the negative direction of the z-axis, without contributing to the warhead lethality but posing potential danger to the gunner. As evidenced from the series of flash radiographic images shown in Figure 1, the tracer holder section of the warhead breaks up into a number of relatively large fragments that may cause serious or fatal injuries to the gunner.
Fragmenting shell
Explosive
Tracer holder
t=0 µsec t=12.5 µsec, V/V0=3
ΘRz
vFragments
t=30 µsecRear fragments
t=50 µsect=300µsec & 500µsec
Mock fuze
Figure 1: Results of CALE modeling and flash radiographic images of a natural fragmentation warhead at 30 and 50 µs (test No. X-969), and at 300 and 500 µs (test No. Y-070) after detonation.
CALE analyses had been conducted until approximately 30 µs after the charge initiation. As shown in the figure, CALE modeling results are in very good agreement with flash radiographic images of the fragmented warhead. The fundamental assumption of all fragmentation analyses presented in this work was that the fragmentation occurs simultaneously throughout the entire body of the shell. Following Pearson [3], the fragmentation of steel shells with the idealized cylindrical geometries occurs approximately at 3 volume expansions, the instant of fragmentation defined as the time at which the detonation products first appear emanating from the fractures in the shell. Accordingly, at approximately 3 volume expansions (12.5 µs), the fragmenting steel shell was assumed completely fractured, and the CALE-code cell flow field data was passed to PAFRAG-MOTT and PAFRAG-FGS2 fragmentation modeling. For a large part the PAFRAG-MOTT fragmentation model is based on the Mott’s theory of break-up of cylindrical “ring-bombs” [4], in which the average length of the resulting circumferential fragments is a function of the radius and velocity of the ring at the moment of break-up, and the mechanical properties of
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
184 Computational Ballistics III

the metal. Accordingly, in the PAFRAG-MOTT model the “random variations” in fragment sizes of natural fragmentation warheads are accounted through the following fragment distribution relationship
( ) .2/1
0∑
−
=L
j
m
jjeNmN µ (3)
In eqn. (3) N0j and µj represent number of fragments and one half of the average fragment mass in the j-th Θ-zone, respectively, computed from the CALE-code data.
6 9 12 15 18Fragment mass, m/µ0
0.00
0.01
0.02
0.03
Num
ber o
f fra
gmen
ts, N
/Nex
p
(m2, N2)
0.0 0.5 1.0 1.5 2.0 2.5 3.0 3.5 4.0 4.5 5.0 5.5Fragment mass, m/µ0
0.0
0.2
0.4
0.6
0.8
1.0
1.2
Num
ber o
f fra
gmen
ts, N
/Nex
p
(m1, N1)
All Fragments, Test X-972 All Fragments, Test X-973All Fragments, PAFRAG-Mott, γ=14All Fragments, PAFRAG-Mott, γ=20All Fragments, PAFRAG-FGS2
(m0, N0)
Figure 2: Cumulative number of fragments versus fragment mass, N=N(m), for small-to-moderate weight (m/µ0 < 5.5) and relatively large (m/µ0 > 5.5) fragments.
The PAFRAG-FGS2 fragmentation model is defined in parametric form as
.)(
)()(
33
2210
33
2210
+++
+++=
∑∑
kkmkkmkkmkm
L
jkkNkkNkkNkNL
jj
j
k
kk
aaaa
aaaam
m
mN
ξξξ
ξξξ
ξξ (4)
In eqn. (4) kξ is a non-dimensional parameter, 10 ≤≤ kξ , k is the curve index, k=0,1, and sixteen coefficients aN’s and am’s are obtained by fitting two curve segments k=0 and k=1 with conditions of curve and tangent continuity at the adjacent ends. Results of the PAFRAG modeling are given in figures 2 through 5. Figure 2 shows plots of the cumulative number of fragments versus fragment mass for
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 185

small-to-moderate weight (m/µ0 < 5.5) and for relatively large (m/µ0 > 5.5) fragments calculated with PAFRAG-MOTT and PAFRAG-FGS2 models. As shown in the figure, attempting to fit the sawdust fragment recovery data with the PAFRAG-MOTT model by changing parameter γ “rotated” the curve, but did not yield an accurate fit to the data. Accordingly, more a “flexible” PAFRAG- FGS2 model was applied. As shown in the figure, using the PAFRAG-FGS2 model resulted in accurate fit throughout the entire range of data. Accordingly, PAFRAG-FGS2 model was used for all further analyses.
0 30 60 90 120 150 180θ, degrees
0.00
0.03
0.06
0.09
0.12
0.15
0.18
Vel
ocity
, cm
/µs
Experimental Data, X-969, t=29.4µsecExperimental Data, X-965, t=125.2µsecExperimental Data, Y-070, t=300.0µsecExperimental Data, X-964, t=310.9µsecCALE-PAFRAG Analyses, Cell Data, t=12.5µsec (V/V0=3)CALE-PAFRAG Analyses, Average, t=12.5µsec (V/V0=3)CALE-PAFRAG Analyses, Adjusted, t=12.5µsec (V/V0=3)
Θ
Image at 29.4 µsec
Image at 49.9 µsec
Figure 3: Fragment velocities versus fragment spray angle Θ and flash radiographic images at 29.4 and 49.9 µs (test No. X-969) after detonation.
Figure 3 shows the PAFRAG model fragment velocity predictions compared with the experimental data. The experimental values of fragment velocities of the main fragment spay (80°≤Θ≤100°) were obtained from the flash radiographic images at 29.4 and 49.9 µs. Velocities of the rear fragments broken off from the tracer section of the shell (which move significantly slower than fragments from the main spray) were assessed from the flash radiographic images at 125.2, 300.0 and 310.9 µs. PAFRAG model prediction of the “average” Θ-zone fragment velocities was obtained from the momentum averaged CALE-code flow field cell velocities. As shown in the figure, the agreement between the PAFRAG model fragment velocities predictions and the data is good. Figure 4 shows PAFRAG model predictions of the fragment mass distribution versus the spray angle Θ; the zonal fragment mass mj and the cumulative fragment mass M distribution functions were computed from CALE-code cell flow field data. For representation clarity, the cumulative fragment mass function M is defined in terms of angle 180°-Θ, not the spray angle Θ. As shown in the figure, the PAFRAG model prediction of the cumulative fragment mass
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
186 Computational Ballistics III

distribution M is in good agreement with the available experimental data at Θ=161.6° (the Celotex™ and the water test fragment recovery) and at Θ=180° (the sawdust fragment recovery).
Θ
z
Rear fragmentsNo lethality
Lethal fragments
Θ=0° Θ=180°
Θ=180° Θ=0°z
Θ=161.6°
0 30 60 90 120 150 180Θ, degrees
0.0
0.1
0.2
0.3
Mas
s, m
j/M0 0 30 60 90 120 150 180
180-Θ, degrees
0.00.20.40.60.81.01.2
Cum
ulat
ive
mas
s, M
/M0
PAFRAG AnalysesSawdust Recovery, Tests X-972 & X-973CelotexTM Fragment Recovery, Test X-964
Θ=161.6o
Figure 4: PAFRAG analyses of fragment mass distribution versus Θ. Cumulative fragment mass distribution from PAFRAG analyses is in excellent agreement with experimental data.
As shown in figure 4, PAFRAG modeling predicts that the majority of the munition‘s fragment spray is projected into a relatively narrow Θ-zone in the direction perpendicular to the projectile’s axis, approximately at angles 80°≤Θ≤100°. This is in good agreement with the flash radiography data showing no fragments projected to the projectile’s anterior region, 0°≤Θ≤50°. The fragment velocity “spikes” in the region of 0°≤Θ≤50° (see fragment velocity plot, Fig. 3), are due the numerical “noise” from a few “stray” mix-material computational cells from the CALE modeling. Because there is no considerable fragment mass in the front Θ-zones, the overall effect of these errors is negligible, and the “average” fragment velocity in the 0°≤Θ≤50° region should be disregarded. As evidenced from the flash radiographic images presented in Fig. 4, the tracer holder portion of the warhead breaks up into a number of relatively large fragments projected in the negative z-axis direction, back towards the gunner. As shown in Fig. 4, in excellent agreement with the Celotex™ and the water test fragment recovery data, PAFRAG modeling predicts that approximately 7.2% of the total fragment mass is projected to the “rear”, in the region of 161.6°≤Θ≤180°. Since according to PAFRAG modeling and the flash radiography data, Fig. 3, the velocities of these fragments is approximately 0.05 cm/microsecond, the broke-up pieces of the projectile’s tracer holder are capable of causing serious injuries or death to the gunner.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 187

Figure 5 shows PAFRAG-FGS2 model predictions of the cumulative number of fragments versus fragment mass, N=N(m), and of the Θ-zonal number of fragments versus Θ, Nj=Nj(Θ), for both the total “all fragments” and the “rear only” (161.6°≤Θ≤180°) modeling cases. The “all fragments” fragment distribution was assessed from the sawdust fragment recovery tests that included fragments from the tracer section together with all fragments from the entire shell. The “rear only” fragment distribution was obtained from the Celotex™ and from the water test fragment recovery experimentation and accounted only for fragments projected at angles greater than approximately 161.6°. The limiting rear fragment collection angle of Θ=161.6° represents the altitudinal angle Θ covering the fragment recovery surface area.
130 140 150 160 170 180Θ, degrees
0
2
4
6
Num
ber o
f fra
gmen
ts, N
j PAFRAG, m > 10 grains, All FragmentsPAFRAG, m > 20 grains, All FragmentsPAFRAG, m > 40 grains, All FragmentsPAFRAG, m > 60 grains, All FragmentsPAFRAG, m > 10 grains, Rear FragmentsPAFRAG, m > 20 grains, Rear FragmentsPAFRAG, m > 40 grains, Rear FragmentsPAFRAG, m > 60 grains, Rear Fragments
Θ=161.60
0 10 20 30 40 50 60 70Fragment mass m, grains
0
15
30
45
60
75
Cum
ulat
ive
num
ber o
f fra
gmen
ts, N
Sawdust Fragment Recovery, All Fragments, Test X-972 Sawdust Fragment Recovery, All Fragments, Test X-973Celotex Fragment Recovery, Rear Fragments, Test X-964Water Fragment Recovery, Rear Fragments, Test Y-070PAFRAG Analyses, All Fragments, FGS2 PAFRAG Analyses, Rear Fragments, FGS2
Rear fragments, upper bound
All fragments, average
Figure 5: Cumulative number of fragments versus fragment mass and number of fragments versus Θ, for total “all fragments” and “rear only” (Θ > 161.6°) distributions.
As shown in Fig. 5, the “rear fragments” PAFRAG-FGS2 model fragment distribution was obtained by fitting eqn. (3) to the upper bound of the Celotex™ and water test recovery data, providing an additional “safety” margin for the safe separation distance analyses. Since in a typical fragmentation warhead only a few fragments are projected backward towards the gunner, establishing a statistically robust database from the conventional fragmentation arena test requires repeated experimentation and is expensive. In contrast, the data from the PAFRAG modeling offers to munition designers more warhead performance information for significantly less money spent. The PAFRAG provides more detailed and more statistically accurate warhead fragmentation data for ammunition safe separation distance analysis, as compared to the traditional fragmentation arena testing approach.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
188 Computational Ballistics III

3 PAFRAG model assessment of lethality and safety separation distance
The safety separation distance analyses presented in this work were performed employing the JMEM/OSU Lethal Area Safety Program for Full Spray Fragmenting Munitions code [6] and the Wedge model computational module. According to [7], the safe separation distance is defined as fixed distance from the weapon’s launch platform and personnel beyond which functioning of the munition presents an acceptable risk of a hazard to the personnel and the platform. Accordingly, the safe separation hazard probability had been calculated based on the warhead’s fragment spray ability to strike and to penetrate exposed (bare) skin tissue of unprotected gun crew personnel. According to [7], the maximum total risk to the munition crew at safe separation distance is generally accepted as 10-6.
1.01.0 2.02.0 3.03.0 4.04.00.20.2 0.40.4 0.60.6 0.80.8
Vz=0Vz=0.25V0Vz=0.5V0Vz=0.75V0Vz=V0
0.1≤Pi≤1.0 Pi≤10-6
Θ=0° Θ=0°Θ=180°Θ=180°
R/R0 R/R0
Figure 6: Areas of 0.1≤Pi≤1 and Pi≤10-6 unprotected personnel risk hazards for varying projectile lunch velocities.
The input for the lethality and safe separation distance analyses included a range of possible ballistic projectile trajectories and the static PAFRAG FGS2 model predictions of the fragment spray blast characteristics. Figure 6 shows resulting plots of areas with 0.1≤Pi≤1 and Pi≤10-6 unprotected personnel risk hazards for varying projectile lunch velocities. As shown in Fig. 6, the projectile launch velocity has a significant effect on both the munition lethality (0.1≤Pi≤1) and the safety (Pi≤10-6). As shown in the figure, if the gun operates normally and launches the projectile with the nominal muzzle velocity of V0, all fragments are projected in the forward direction, posing no danger to the gun crew. However, if the gun misfires (Vz<< V0) and the munition is detonated, the results may be catastrophic.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 189

Acknowledgements
Messrs. K. P. Ko of PM MAS and A. N. Cohen of US Army RDEC-ARDEC are acknowledged for providing funds that made this work possible. Mr. K. W. Ng of US Army RDEC-ARDEC and Mrs. Y. Wu of SAIC are acknowledged for their contribution in CALE modeling. Mr. W. J. Poulos of US Army RDEC-ARDEC is acknowledged for performing experiments. Mr. T. Fargus and Mrs. D. L. Snyder of US Army RDEC-ARDEC are acknowledged for performing lethality and safety separation distance analyses.
References
[1] Joint Munition Effectiveness Manual. “Testing and data reduction procedures for high-explosive munitions”, Report FM 101-51-3, Revision 2, 8 May 1989.
[2] Tipton R. E., “CALE users manual”, Version 910201, Lawrence Livermore National Laboratory, 1991
[3] J. Pearson, “A fragmentation model for cylindrical warheads”, Technical Report NWC TP 7124, Naval Weapons Center, China Lake, California, December 1990.
[4] N. F. Mott, F.R.S., “Fragmentation of steel cases”, Proc. Roy. Soc., Vol. 189, pp. 300-308, 1947.
[5] J. C. Ferguson, “Multivariable curve interpolation”, Report No. D2-22504, The Boing Co., Seattle, Washington, 1963.
[6] Joint Technical Coordination Group for Munitions Effectiveness. “Computer program for general full spray materiel MAE computations”, Report 61 JTCG/ME-70-6-1, 20 December 1976, Change1: 1 April 1991.
[7] “Guidance for Army Fuze Safety Review Board safety Characterization”, US Army Fuze Office, January, 1999.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
190 Computational Ballistics III

Section 6 Systems and technology

This page intentionally left blank

Evaluations of computational techniques for the engraving of projectiles
J. South, B. Powers & M. Minnicino US Army Research Laboratory, Aberdeen Proving Grounds, MD, USA
Abstract
This paper presents research on the evaluations of computational methods used to model the engraving of small caliber projectiles. The launch mechanics of a 5.56 mm projectile fired from a rifled barrel based on a M16A2 are examined in this study. The interaction between small caliber projectiles and rifled barrels is evaluated using finite element analysis (FEA) simulations utilizing the 3D explicit dynamic FEA LS-DYNA code. The calculations were performed to understand the interaction of the projectile during the initial portion of launch, where the projectile is subjected to the dynamic pressure from the combustion of the charge. The modeling parameters investigated include the order of element integration, the hourglass control scheme, and contact algorithms. The stress and strain state within both the projectile and the barrel are evaluated and compared to experimental data. The results show that a comparison of global hourglass energy to internal energy can lead to improper conclusions about the validity of the engraving model. The choice of the hourglass scheme and contact algorithm affects the hourglass energy and may affect the internal energy. This effort has led to increased insight into the behavior of the engraving process on small caliber projectiles and the numerical techniques necessary to reduce modeling difficulties. Keywords: engraving, projectile, hourglass.
1 Introduction
Correct simulation of the engraving process is crucial for the design of obturation and prediction of in-bore dynamics. In addition, given realistic constitutive models, consideration of the utility of different materials for the bullet can be made. Unfortunately the engraving process is a difficult
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 193
doi:10.2495/CBAL070181

phenomenon to model. During the engraving process excessive element deformations often lead to erroneous results. A possible solution is to utilize element erosion; however, this approach assumes that the elements and the corresponding volume of material engraving is worn away, which may not capture the effect of material yielding and flow around the rifling of a barrel during the launch of a projectile. Two dimensional modeling can be applied [1,2] to evaluate the axi-symmetric interaction of a projectile with a barrel but this approach precludes a true rifling profile with lands and grooves. Full three dimension modeling is required to properly evaluate the engraving process.
In this study evaluations of the computational techniques for the engraving of 5.56 mm projectiles were performed. The interaction between small caliber projectiles and rifled barrels was evaluated using finite element analysis (FEA) simulations utilizing the 3D explicit dynamic FEA code LS-DYNA. A simplifying assumption in these analyses was that the rifling profile was without twist and that the interactions could be assessed with a quarter symmetry model. Excessive element deformations and high hourglass energies were present in the initial modeling efforts and caused numerical difficulties. In an effort to address these issues, a series of modifications were implemented into the models to evaluate the effects of the hourglass control scheme, order of integration of the elements, and the contact algorithm,
2 Model development
Finite element models (FEM) were developed of a 5.56 mm projectile fired from a rifled barrel based on a M16A2. As previously stated a simplifying assumption in these analyses was that the rifling profile was without twist. This assumption provided the ability to generate quarter symmetric models. The standard projectile evaluated in the models was the M855 projectile. This projectile contains a hardened steel penetrator backed by a lead-antimony slug encased in a copper gilding full metal jacket body [3].
Figure 1: Graphics of the quarter symmetry model showing two different views.
The geometry for both the projectile and the weapon [4] were obtained from their respective technical drawing packages. The barrel was assumed to be an ideal barrel with perfect symmetry and centerline, and a greatly reduced length to
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
194 Computational Ballistics III

decrease computation time since only initial engraving was to be studied. Axial boundary conditions were applied to the base of the barrel to prevent its motion. The base pressure-time curve for the M855 was obtained from the interior ballistic code IBHVG2.
The simulations were performed using LS-DYNA [5]. Contact was used between the slug-core-jacket and the jacket-barrel. All of the components within the projectile were kinematically constrained by contact surfaces. The material properties for the components in the model were obtained from experimental data. A graphic of the model is show in Figure 1. The baseline model possesses six elements thru the thickness of the copper gilding metal and thirty six elements across the ninety degree sweep of the quarter symmetry. The baseline contact algorithm was surface to surface with the master and slave pairs identified by parts. The baseline hourglass control was the stiffness form.
2.1 Quasi-static model of push test
A quasi-static model was used to explore dynamic effects by comparing with the baseline model. While the material properties defined in the model are not rate dependent, inertial and transient effects are still present in the baseline model. Also, the results of quasi-static experiments are available where a projectile was slowly pushed through a barrel [6]. In these experiments an M855 projectile was statically pushed thru an M16A2 barrel at a given displacement rate. The load, displacement of the push rod, and hoop strain on the outer diameter of the barrel were recorded in a manner similar to that described in [7]. This data allows for a validation of the model with the experiments.
The geometry of the baseline dynamic model was used for the quasi-static analysis. Mass scaling was used to artificially increase the density, in turn increasing the time step through the Courant Condition [5]. This allows quasi-static simulations to be completed with an explicit finite element code using a minimum of computational time. The purpose of the “long time” simulation is to remove any transient and inertial effects from the simulation. The time step and termination time were arbitrarily chosen to be 5.0x10-5 s and 2.5 s, respectively. The time scale of the pressure-time history was linearly scaled to cover the entire defined run time of the model. Mass damping was applied to all materials in the model to damp out any oscillations in the solution due to solver noise. A value of 10% of critical damping at 5 Hz was used.
2.2 Hourglass control and contact algorithm effects models
The simulations to evaluate the affect of altering the contact algorithm also evaluated the incorporation of selective reduced fully integrated elements and viscous hourglass control. In these models the projectile was altered so that the internal components of the projectile were steel. This was chosen since previous work [6,8] has shown that the choice of slug material affects the radial stress exerted on the rifling lands and the grooves. Steel was chosen so as to exacerbate this effect as a worst case scenario.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 195

The contact algorithm and element integration order and their corresponding model are presented in Table 1. The automatic option for contact in LS-DYNA changes how the surface normals of the search algorithm on master surface are calculated. The default option uses normals calculated at the nodes, where the automatic option calculates the normal on element edge segments. The fully integrated elements were only selected for the jacket and the lands and grooves. The remainder of the barrel was set at single point integration elements. The application of the fully integrated elements was chosen to compare the inherent elimination of hourglass modes with the increased computation time.
Table 1: Listing of the corresponding model and contact algorithm.
Model LS-Dyna Contact Algorithm A Surface to Surface B Automatic Surface to Surface C Surface to Surface with Fully Integrated Elements D Surface to Surface with Fully Integrated Elements and
Viscous Hourglass Control E Automatic Surface to Surface with Fully Integrated
Elements
3 Model results
3.1 Quasi-static model of push test
The quasi-static models were post processed to compare the hoop strain to the experimental data and to evaluate the selection of model control parameters. To verify that the simulation is quasi-static, the kinetic energy was verified to be negligible compared to the internal energy. The hourglass energy was examined to verify that the energy preventing the hourglass modes was negligible to the internal energy. The ratio of the hourglass energy to the internal energy was found to be a maximum of 2.0% after engraving started.
The predicted strain data was compared between the static and dynamic cases at a location 1.27 cm from the chamber end of the barrel section. Figure 2 shows the predicted hoop strain and the average experimental hoop strain plotted against projectile displacement. For comparison, the strains could not be plotted versus time since the projectiles in the model and experiment would not be at the same location for a given time. The average experimental hoop strain from the push test has a maximum of approximately 105 µε. The maximum predicted hoop strain from the quasi-static model is 170 µε. The longitudinal shift between the two data sets is due to the fact that the strain gauges were placed further down the barrel in the experimental setup. This increased distance was the result of experimental constraints within the test fixture. The maximum dynamic strain was approximately 1.5 times greater than the quasi-static strain.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
196 Computational Ballistics III

0
50
100
150
200
250
300
0 0.01 0.02 0.03 0.04 0.05 0.06 0.07Displacement [m]
Mic
rost
rain
Static Strain
Dynamic Strain
Average Experimental Data
Figure 2: Plot of the predicted strain for the static and dynamic simulations as
well as experimental strain from a push test.
0
2
4
6
8
10
12
0 0.0001 0.0002 0.0003 0.0004 0.0005Time [sec]
Inte
rnal
Ene
rgy
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35H
ourg
lass
Ene
rgy
Model A Internal EnergyModel C Internal EnergyModel A Hourglass EnergyModel C Hourglass Energy
Figure 3: Plot showing internal (open symbols) and hourglass (filled
symbols) energy.
3.2 Contact algorithm effects
The affect of the contact algorithm, element and material selections was quantified by comparison of the internal energy and hourglass energy. Figure 3 shows the representative internal and hourglass energies for models A and C.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 197

The 0.25 ms delay in the appearance of measurable energy is due to the time necessary to build sufficient pressure to begin engraving of the projectile. The hourglass energies in the figure begin to increase after 0.25 ms and then decrease as the time approaches 5 ms. The decrease is the result of the projectile exiting the barrel section.
0.0%
0.5%
1.0%
1.5%
2.0%
2.5%
3.0%
3.5%
4.0%
4.5%
5.0%
0.00025 0.0003 0.00035 0.0004 0.00045 0.0005[Time]
Hou
rgla
ssE
nerg
y/In
tern
al E
nerg
y
A BC DE
Figure 4: Plot of the ratio of hourglass energy to internal energy for the six models.
The ratio of the hourglass energy to the internal energy was plotted for the five models. Figure 4 shows these ratios as a function of time. The data in the figure between zero and 0.25 ms are not valid as the data is the quotient of two small numbers. Figure 3 shows that the internal and hourglass energies are very small between zero and 0.25 ms. Once engraving begins the ratios begin to consolidate into groups. Models A and B, without higher integration order elements, yielded a ratio with a maximum of 4%. Models C and E with some fully integrated elements yielded a maximum ratio of less that 0.5%. There was an average 40% increase in the run time between models with and without the fully integrated elements. Model D with the viscous hourglass control demonstrated an increasing ratio during the time that the projectile was engraved. This value peaked at approximately 4.5%. All of the contact formulations with stiffness hourglass controls improved with time.
3.3 Local effect of hourglass control algorithm
As shown previously, the hourglass control algorithm has a large effect on the global hourglass energy. The engraving process has large local stresses, which might drive local hourglassing. This local effect might not be seen in the global energy comparisons. For this application, the state of stress in the land is of particular interest, so the effect of the hourglass control algorithm on the land stress is compared.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
198 Computational Ballistics III

The radial stress on a land in the first element forward of the forcing cone is shown in Figure 5. All three cases show an initial peak when the projectile first contacts the element, and then a sharp change in stress level. The Stiffness Control case shows a tensile radial stress after the sharp change in stress level, and then the stress sharply oscillates. The radial stress in the Viscous Control case stays compressive and oscillates around an average value. The Fully Integrated case has the smoothest time history. The radial stress stays compressive, and the magnitude of the oscillations is the lowest of the three cases.
-1600
-1400
-1200
-1000
-800
-600
-400
-200
0
200
400
0.0002 0.00025 0.0003 0.00035 0.0004 0.00045Time [sec]
Rad
ial S
tress
[MP
a]
Fully IntegratedViscousStiffness
Figure 5: The radial stress in a land as a function of time for the Fully
Integrated, Viscous Control, and Stiffness Control.
4 Discussion
4.1 Quasi-static model
The quasi-static model acts as a bridge between the dynamic model and the experimental results. The comparison of the maximum hoop strain shows reasonable agreement between the quasi-static model and the experimental data. The strain was recorded over a land in the quasi-static FE model where the maximum affect of the passing projectile would be expected. This difference may be because the experiment uses a real barrel where the lands have a twist, which might cause the strain measurement taken at fixed location on the barrel to decrease faster as the projectile moves by. Also, the FE analysis only modeled a section of the barrel 3.8 cm in length and the projectile is approximately 2.3 cm long. The shorter barrel length is more compliant since the end faces are not constrained, allowing the faces to move radially. Therefore, the model might deform more as the projectile passes, than the experimental barrel.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 199

The agreement between maximum strains from the experiment and quasi-static model gives confidence that assumptions made in creating the FE models are reasonable. The dynamic strain is expected to be greater because of inertial effects that are likely to results in projectile dilation. This is seen in the results for the dynamic FE model, where the maximum is approximately 1.5 times greater than the quasi-static model.
4.2 Global energy effects
The simulations to evaluate the effect of the contact algorithm, element integration order and hourglass control yielded clear data. The affect of
E, had very little effect on the ratio of the hourglass to the internal energy. There was some reduction in the ratio by use of this option but the reduction was on the order of 0.1%. There was no change to the solution time of the model. As expected the use of fully integrated elements for portions of the model greatly reduced the overall hourglass energy and thus the ratio. This decrease was a factor of eight as the ratio was reduced from 4% to 0.5%; however, this decrease was offset by a 40% increase in run time. For more complex models, a substantially longer runtime could be a factor in meeting design timeframe constraints.
4.3 Local effects
One advantage of the finite element method is the ability to inspect local effects. While the stiffness hourglass control is shown to be more effective than the viscous algorithm from a global energy perspective, care must be taken when validating the model. In general, viscous hourglass control is preferred for simulations involving high rates of deformation. Stiffness hourglass control should be used when the rates of deformation are low. When investigating the radial stress in a land, the stiffness control gave the least reliable results, even calculating a tensile radial stress when this is physically impossible. This is most likely due to the element hourglassing, making the stress prediction incorrect. In a large model such as this, a small number of elements hourglassing will not affect a global energy comparison. But if the primary region of interest is near those elements, the model cannot be used for quantitative analysis. The viscous control algorithm predicted a much more realistic time history for the radial stress. This is not surprising since the strain rates at the contact interface are expected to be rather high. The rest of the model, which includes the majority of the barrel, the core, and penetrator, experiences low strain rates. Therefore the viscous control has minimal effect on suppressing the hourglassing in large sections of the model. A global energy comparison highlights this problem and shows the stiffness control performing better at suppressing hourglassing, even though the viscous control predicts a more realistic stress in the land.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
200 Computational Ballistics III
including the automatic option onto surface to surface, models A and B and C and

The use of fully integrated elements in the land prevents the hourglassing in the area of interest and predicts a realistic radial stress history. The computational cost of fully integrated elements is high, which is why they were only used locally. Another drawback is that fully integrated elements cannot undergo large deformations like reduced integration elements. Used sparingly, fully integrated can be used to insure trustworthy results in areas of importance.
5 Conclusions
In this study, evaluations were conducted to investigate different computational techniques for the engraving of a 5.56 mm projectile fired from a rifled barrel based on a M16A2. The results show the choice of the contact algorithm, element order of integration, and hourglass control can drastically affect the accuracy of the model as well as the run time. The baseline model was evaluated quasi-statically and validated against experimental data. The choice in contact algorithm can affect the hourglass energy. For this engraving model the use of a stiffness form of hourglass control yielded the best results from a global energy perspective, while the viscous formulation appeared to result in energy ratios that were increasing. However, the local stress in the land shows that the viscous control predicts more realistic stress history. The partial use of fully integrated elements provided the expected reduction in the energy ratio however this reduction, from 4% to 0.5%, was at the expense of a 40% increase in run time.
The results of this modeling effort have led to increased insight into the behavior of the engraving process on small caliber projectiles and the numerical techniques necessary to reduce numerical difficulties. The models should be tailored to the problem being solved to provide the most accurate results. Future work will include combinations of hourglass and viscous hourglass control in different parts of the engraving model in an effort to save on the computational cost of using fully integrated elements.
References
[1] Chen P.C.T., “Analysis of Engraving and Wear in a Projectile Rotating Band,” U.S. Armament Research, Development and Engineering Center Technical Report ARCCB-TR-99012, Watervliet, NY, USA, July 1999
[2] Chen P.C.T., “Modeling of Barrel/Projectile Interaction in a Rotating Band,” U.S. Armament Research, Development and Engineering Center Technical Report ARCCB-TR-01011, Watervliet, NY, USA, June 2001
[3] M855 Technical Drawing Package, Armament Research, Development and Engineering Center Picatinny Arsenal, NJ, USA, 1980
[4] M4A1 Technical Drawing Package, Armment Research, Development and Engineering Center, Rock Island, IL, 2001
[5] LS-DYNA Users Manual, Livermore Software Technology Corporation, Livermore, CA, USA, 2003
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 201

[6] South J., Yiournas A., Minnicino M., “The Effect of Slug Material on the Behavior of Small Caliber Ammunition,” U.S. Army Research Laboratory Technical Report ARL-TR-3901, APG, MD, USA, 2006
[7] Siewert J., “Small Caliber Engraving Force Measurements,” Presented at the NDIA Small Arms Systems Section Annual Symposium, Exhibition and Firing Demonstration, Las Vegas, NV, USA, 10-13 May 2004, www.ndia.org
[8] South J., Newill J., Kamdar D., Middleton J., Hanzl F., DeRosa G., “Bridging the Gap Between the Art and Science of Materials for Small Caliber Ammunition,” Amptiac Quarterly, 8(4), pp. 57-63, 2004.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
202 Computational Ballistics III

Long range electromagnetic cannon
E. Schmidt & J. Tzeng US Army Research Laboratory, Aberdeen Proving Ground, MD, USA
Abstract
Electromagnetic (EM) railguns offer the potential to fire projectiles at velocities up to 6 km/s. This could conceivably permit ballistic trajectories to reach very long ranges, perhaps 1000 km or more. To deliver a payload of interest and survive the aerothermal environment associated with hypervelocity, sea level launch, the projectile would need to be quite large, 500–1000 Kg. This in turn implies a launcher of prodigious size and mass. This paper examines the nature of an electromagnetic cannon required to achieve such capabilities. Keywords: electromagnetic launch, rail guns, hypervelocity flight, long range artillery.
1 Introduction
Historically, there has been a continuing interest in long range cannons. During the First World War, Germany [1] employed the 210 mm, K12(E), Paris Gun with a maximum range of 115 km. In the Second World War, they fielded the 800 mm Gustav cannon with a range of 47 km. The cannon was transported in pieces and assembled on two parallel railway tracks by a crew of 1200 men. Naval artillery also illustrates this trend as the bore size of guns on battleships grew throughout the Twentieth Century culminating in the 460 mm guns on the Japanese Yamato class with a range of 40 km. With the advances in aircraft and missile capabilities, long range delivery of ordnance became routine and interest in very large calibre guns has waned. However, the cost of missiles and risk of manned delivery are of concern. Thus, worldwide efforts to increase the range of conventional artillery, e.g., 155 mm, have lead to the introduction of technologies such as base bleed, rocket assist, and gliding trajectories stretching ranges out to nearly 100 km. At the Electromagnetic Launch Symposium in May 2006 in Potsdam, Germany, MG Nadeau (Commander, US Army RDECOM) challenged the
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 203
doi:10.2495/CBAL070191

technical community to consider the viability of extremely long range artillery. In particular, he was interested in a system that could send projectiles over distances equivalent to one or more time zones. Since a time zone at 30o latitude has a width of 1400 km or so, such an undertaking is daunting. While no program existed to provide such a capability, Schmidt [2] conducted a parametric study of possible electromagnetic (EM) railgun solutions to this challenge; however, the required launcher was not examined in detail. The present paper provides some of this information for one possible delivery system.
2 Projectile
EM guns are not rifled; thus, a statically stable projectile is considered. Fin stabilization is assumed; although it is recognized that aerodynamic heating may preclude such a scheme. The projectile, Figure 1, has a body diameter of 0.20 m and a length of 2.46 m. The projectile has a tungsten nose to improve stability and provide some thermal protection. PRODAS [3] is used to compute inertial and aerodynamic properties. With allowances for batteries and guidance, the flight mass is 227 Kg and the transverse and axial moments of inertia are 101 and 1.65 Kg-m2, respectively. The payload is 57 Kg. The center of gravity is 6.67 calibers from the nose, while the center of pressure is 6.94 calibers from the nose. With a static margin of 0.27 calibers, the projectile is barely stable; however, this may be advantageous in providing control authority to the guidance system.
Figure 1: Schematic of notional projectile.
The muzzle velocity of interest is 4.0 km/s. At this velocity, the zero yaw drag coefficient is CDo = 0.172. Because of the long ranges considered, the trajectory of the projectile is computed using central body theory assuming an exponential atmosphere throughout the flight. At the 4.0 km/s muzzle velocity and 50o elevation, a range of 1176 km is estimated, Figure 2. This velocity is well within the demonstrated capabilities of EM railguns using plasma armatures. For these launch conditions, a maximum altitude of nearly 400 km is obtained. Such a trajectory closely replicates that of an intermediate range ballistic missile.
Tungsten Nose Payload
GNC Battery 6 Thick Clipped DeltaFins
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
204 Computational Ballistics III

Figure 2: Trajectory for Θ = 50o, vm = 4 km/s.
3 EM railgun launcher
3.1 General description
The EM railgun accelerates the projectile under the influence of the Lorentz force, Figure 3. Current is passed down one rail, crosses over through the projectile armature, and returns through the opposing rail. The magnetic field, B, generated by the two rails acts on the current in the armature, J, to produce the JxB force. This purely electrical operation results in significant advantages compared to conventional cannon. An EM gun is capable of pushing projectiles to very high velocity. Values 6 km/s and greater have been reported for light masses. Conventional cannon are limited by the free expansion velocity of the propellant gases, typically around 3.5 km/s. Practical considerations limit this to velocities of 1.8 km/s or less. As the magnetic field acts on the armature, it also acts on the opposing rails resulting in a Lorentz force that will cause the rails to repel each other. Thus, confinement must be provided to hold the gun assembly together. For the purpose of describing the size and mass of the launcher, this confinement is given particular attention herein.
Figure 3: Schematic of a typical railgun.
Current Armature
SabotForce
Rail Repulsion Force
x x x x x x x x Magnetic Field x x x x x x x x x x
0
100
200
300
400
0 500 1000 1500Range (km)
Alti
tude
(km
)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 205

It is assumed that the launch package consists of the flight body, a base push armature, and a sabot to provide in-bore support to the projectile. Based on the action limit, it has been postulated [4] that a parasitic mass ratio (armature and sabot mass divided by total launch mass) of 25% is realizable. Thus, the total launch mass is taken to be 303 Kg. At vm = 4.0 km/s, the resulting muzzle energy is 2.42 GJ. To provide clearance for the fins, the bore diameter is 0.525 m. A circular bore geometry is assumed with a pair of GlidCop rails each having an 80° included angle. There are a number of constraints that must be considered in developing a design for the railgun. Among them are the acceleration tolerance of the payload, the projectile base pressure, the bore pressure relative to the yield strength of the bore materials, the rise in bulk bore temperature during the shot, and the current density to which the rails are exposed as the projectile passes. Available technology for projectile guidance systems limits maximum acceleration levels to less than 20 Kg. For the projectile considered here, the maximum in-bore acceleration is selected to be 17.5 Kg, which allows the guidance system to survive and gives a maximum base pressure equivalent to that of conventional cargo carrying projectiles. Based on prior data from electromagnetic guns, a reasonable value for the acceleration ratio, average to peak, is 0.7. This leads to an estimated bore length of 67 m. Brody [5] gives a relation for the rail temperature rise based on the electrical action to which the rails are exposed:
∆T = 2[ρe /(ρmCp)]mvm/L’A2 (1)
where ρe is electrical resistivity, ρm is material density, Cp is heat capacity, L’ is the longitudinal inductance gradient, and A is rail cross-sectional area. From this relation, the rail thickness may be computed once an allowable temperature rise is selected and L’ is known. To permit multiple shots to be fired without serious degradation of composite properties, ∆T = 20 K is selected. Since L’ depends upon the rail thickness, an iterative process is required. As an initial estimate [6], L’ = 0.5 µH/m. These values result in an initial estimate of rail thickness, t = 82.5 mm. Ellis [7] has developed a model that integrates the electromagnetic fields surrounding the rails to obtain a value of L’ and other properties of interest. The corrected value for the inductance gradient is L’ = 0.57 µH/m. This results in a thickness, t = 77.8 mm. Further iteration produces no perceptible change in L’. An expression for the Lorentz force is F = ½ L’I2 = ma. Knowing the launch mass, maximum acceleration, and L’, the peak current is computed to be Imax = 13.5 MA. Thus, the maximum current density at the armature location is 36.8 kA/mm, a value within the accepted limits for copper. McNab [4] calculates the back emf for a railgun launcher as Vback = IL’vm. For the present launcher, this predicts Vback = 30.8 kV yielding a maximum power required of 416 GW. These values imply a pulsed power supply of impressive capabilities and equally impressive size and mass. For space launch of a 1250 Kg launch package at vm = 7.5 km/s (Em = 35 GJ), McNab proposed using 100 pulsed alternators distributed
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
206 Computational Ballistics III

along the 1600 m length of the earth-to-space launcher. Treatment of the power supply is beyond the scope of the present study; however, the details of the launcher structure are considered in the next section.
3.2 Structural analysis
The rails are copper and are separated by G10 (glass composite) insulators. The containment is assumed to be constructed with carbon composite hoop wound overwrap. In general, the stress magnitude and distribution can be adjusted by varying the thickness of rail and containment, the arc length of rails, and the stiffness ratio of the gun bore components. A finite element model, Figure 4, is built to calculate the stress profiles in the bore. The rail, insulator, and containment are shown in the region of blue, orange, and gray, respectively. The rail thickness is 77.8 mm (3 in) and the containment thickness is 127 mm (5 in). Based on these thickness and material assumption, the structural analysis showed the gun bore can be designed and built with reasonable engineering effort.
Figure 4: Finite element model of the gun bore.
Hoop, radial, and shear stress profiles are illustrated in Figures 5–7, respectively. The stress profiles are plotted in English units (i.e. psi). The maximum tensile hoop stress of 630 MPa (90 ksi) is located in the inner radius of rails. Accordingly, the combined hoop and radial stress at the inner radius is critical since it is assumed that a 140 MPa (20 ksi) magnetic pressure is applied on the surface. The combined stress is in excess of the 517 MPa yield of GlidCop; however, evolving alumina particle reinforced coppers may be available to meet the strength requirement. In actuality, the magnetic force is distributed through the entire rail thickness and can only be determined by more detail electromagnetic analysis. The hoop stress at the inner radius of insulator is 525 MPa (75 ksi) in compression. It may be critical for commonly used material such as G10, various materials or insulator designs can mitigate these stress problems.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 207

Figure 5: Hoop stress profile in the gun bore.
Figure 6: Radial stress profile in gun bore.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
208 Computational Ballistics III

Figure 7: Shear stress profile in the gun bore.
The radial stress is manageable but shear stress is critical in this gun bore design. It is about 175 MPa (25 ksi) in the region of the rail/insulator interfaces. It is slightly high for composite materials (G10 and carbon composite). However, it again can be mitigated by using different material or varying the composite fiber architecture and thickness. When a high strength, hoop wound carbon composite containment is used, the hoop stresses in the containment are quite manageable. A shortcoming of the gun tube may be a lack of the axial strength and stiffness; however, the addition of external truss should provide the axial requirement. This preliminary evaluation of the rail gun design shows that a functional gun bore design can be achieved.
3.3 Launcher dimensions
To show the scale of the launcher, a comparison between the EM Long Range Artillery Launcher and the World War II German Gun, Gustav, is presented in Figure 8. The EM launcher is roughly twice as long as Gustav, but has a bore of 525 mm compared to 800 mm. The outer diameters of the two cannon are roughly equal. Given its length, the EM launcher will require an external truss work to provide stiffness against droop. The Paris Gun of World War II used such a truss. From the structural analysis, the weight of the EM gun tube is calculated to be 77,560 Kg given a length of 66.6 m. This is significantly less massive that Gustav which weighed in at 364,000 Kg.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 209

The recoil system is an important consideration in determining overall size and mass. Gustav launched a 4800 Kg projectile to a velocity of 820 m/s using roughly 704 Kg of propellant. This results in a recoil impulse of 4.22 x 106 N-s. Surprisingly, the longer EM launcher firing a 303 Kg projectile at 4.0 km/s has a lower recoil impulse of 1.21 x 106 N-s. Thus, the size and mass of the recoil system and overall cannon mount could be less for the EM launcher than for Gustav. Of course, the power supply must be given consideration. For Gustav, it consisted of the propellant needed for each shot. For the EM launcher, a rather substantial array of pulsed alternators or capacitors would be needed. Depending upon the number of rounds to be fired, the volume of the pulsed power supply could be offset by the reduction in propellant. Of course, Gustav only fired a total of 48 rounds in anger.
Figure 8: Relative scales of EM launcher and 800 mm Gustav cannon.
4 Conclusions
A study is presented to examine the launcher required to electromagnetically fire a projectile to very long range. The scale of the launcher is prodigious, generally larger than any known gun capable of transport or elevation. Although not addressed in this paper, the pulsed power supply needed to drive the launcher is also a challenge.
References
[1] Hogg, I., Twentieth-Century Artillery, Amber Books, London, 2000. [2] Schmidt, E., Aerodynamic Aspects of Hypervelocity Projectiles,
Proceedings of the 23rd International Symposium on Ballistics, Tarragona, Spain, April 2007.
[3] PRODAS 2000, Arrowtech Associates, Burlington, VT, (2000). [4] McNab, I., Launch to Space with an Electromagnetic Railgun, IEEE
Transactions on Magnetics, 39, (2003). [5] Brody, J., Theoretical Design and Modeling of an Infantry Railgun
Projectile, Thesis, Naval Postgraduate School, Monterey, CA, 2005.
Gustav
EM Launcher
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
210 Computational Ballistics III

[6] Werst, M., Cook, K., Kitzmiller, J., Liu, H., Price, J., and Yun, H., Design and Testing of a Rapid Fire, Lightweight, Ultra Stiff Railgun for a Cannon Caliber Electromagnetic Launcher System, IEEE Transactions on Magnetics, 31 (1995).
[7] Ellis, R., Private Communication, ONR, Rosslyn, VA, February 2007.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 211

This page intentionally left blank

Analysis of weapon systems protecting militarycamps against mortar fire
M. Graswald, I. Shaydurov & H. RotheHelmut-Schmidt-University, Hamburg, Germany
Abstract
The protection of military camps that are subject to attacks by rockets, artilleryprojectiles, or mortar grenades (RAM) is currently in the spotlight of Westernnations involved in overseas missions. Due to its worldwide distribution andgood combat properties for guerilla warfare, mortars are likely to be applied andtherefore selected as RAM threat in this paper. For this case, camp safety shallbe ensured by an early warning system and an air defense weapon system using35 mm Ahead ammunition. For both systems, a key to success is the accuracyof the sensors used, namely the radar. Therefore after providing the mathematicalbackground, simulations are conducted in order to find the variations of the hitpoint of mortar shells. Moreover, the consumption of Ahead ammunition to engageand destroy typical 82 mm grenades is estimated. From these results, the suitabilityof present radar sensors and air defense systems and the technical requirements offuture weapon systems can be derived.Keywords: rockets artillery mortar (RAM), 35 mm Ahead ammunition, radarsensor, exterior ballistics, terminal ballistics, probability calculation, errorpropagation, circular error probability, ammunition consumption.
1 Introduction
Accomplished missions of the Western military e.g. in Iraq or Afghanistan in therecent past have shown that the safety of military camps is not sufficient. This isbecause suitable weapon systems protecting the military installations against thisnew asymmetric threat do currently not exist. Furthermore, these RAM attacks byguerillas or terrorists are frequently undertaken from urban area and therefore,the rules of engagement do usually not allow counterstrikes. Primarily, mortargrenades of 60 and 82 mm caliber and unguided 107 mm rockets are distributed
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 213
doi:10.2495/CBAL070201

all over the world in great quantities and relatively easy to obtain and thus chosenfor attacks.
This study concentrates on 82 mm mortar grenades as a typical example for theRAM threat. Two different approaches to increase the camp safety are investigatedand requirements will be given for:
• an early warning system that alerts soldiers depending on the predicted pointof impact of the mortar shell,
• an air defense system that intercepts the shells in a safe distance with Aheadsub-projectiles forming a fragment cone, fig. 1.
2 Ballistic model
A mathematical model is adopted estimating the ballistic coefficient of the grenadefrom four radar tracks of its flight path. As a result, it allows the iterativecalculation of the trajectory from an averaged radar location to either the firingor the hit point.
2.1 Exterior ballistics of mortar grenades
Since the mortar grenades considered are arrow-stabilized and fired on shortdistances up to approximately 8 km, the 2-DOF equations of motion are derivedfrom Newton’s second law treating the grenade as point mass and incorporatingonly gravitation and air drag as external forces. This leads to the system ofdifferential equations given in a path-dependant form for a right-handed frameof reference shown in fig. 2:
v′x =dvx
dx= −c2(Ma) v(x) (1a)
p′ =dpdx
= − g
vx(x)2(1b)
y′ =dydx
= p (x) (1c)
t′ =dtdx
=1
vx(x)(1d)
where p = tan θ = vy/vx, v = vx
√1 + p2, vx – x-component of velocity, vy
– y-component of velocity, g – acceleration due to gravity (g = 9.81 m/s2), t –computed time of flight, θ – quadrant elevation, c2(Ma) – coefficient of air dragdepending on Mach’s number.
2.2 Trajectory determination by radar measurements
A well-known procedure to experimentally determine the projectile’s air drag isadopted to estimate the ballistic coefficient [1]. This coefficient is an essentialinput parameter solving eqns. (1) numerically in order to calculate the trajectory.It is iteratively computed starting at point B determined by radar measurements tothe hit point, see fig. 3.
To estimate the ballistic coefficient it is assumed that the velocity dependingpart of the air drag is known by an experimentally determined reference function
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
214 Computational Ballistics III

................................................................................................................................................. ................................
................
................
................
................
................
................
..................................
.....................................................................................................................................
X
Y
Z
................
......................................................................................................................................................................................................................................................................................................................................................................................................
............. ............. ............. .............
.........................................
..........Point ofignition
........................................................................................................................................................................................................................................................................................................
................................................................................... Mortar
grenade
........................................................................................................................................................................
..................................................................βhK .........................................
AE = ACEP
Figure 1: Fragment cone.
......................................................................................................................................................................................................................................................................................................................................... ................................
................
................
................
................
................
................
................
................
................
................
................
........................................
XI
YI
ZI
............................................................................................. .
............ ............. ......
....... ............. .............
............. ............. ............. .
............ ..........................
........................................................................
.......................................................... ................
v
....................................................................................................................... ................ vx................
................
................
.................................vy
................
.............................................................
θ.............c.m. .........................................................................................FW
.........................................................................................FG
......................................................................................................................
Figure 2: Inertial reference frame.
and the part depending on the atmosphere is considered as constant. Therefore,the term that depends on the projectile itself needs to be determined and is calledballistic coefficient c.
The drag coefficient c2 (c can simply be derived from it) is determined by thedrag function FW = ρ
2cW v2A, which corresponds to the difference in kinetic
energy in A and B and refers to the distance xAB :
c2 =aW
v2m
, (2)
where aW = 12 (v2
xA− v2
xB)/ xAB is the deceleration and vm = 1
2 (vxA + vxB )is the averaged horizontal component of the projectile’s velocity. The horizontaldistance of the averaged radar locations A and B is determined geometrically byxAB =
√(xB − xA)2 + (zB − zA)2.
The velocities and coordinates in x and z at the locations A and B are calculatedby two tracks of a monopulse radar, respectively. Due to the specific form ofeqns. (1), only horizontal components of the velocity and the horizontal distancebetween A and B are required. In another step, these radar tracks xi, yi, zi (i =1 . . . 4) are linked to measuring quantities of radar azimuth α, elevation ε, andtime t.
3 Error propagation
The methods of error propagation are applied to the model in Section 2 inorder to find variations of the point of impact depending on the sensor accuracy,i. e. variations in range, deflection, and the circular error probability (CEP). Allsystematic measuring errors shall be eliminated by calibration or adjustment.Thus, the measurements of the radar azimuth, elevation and time are subject torandom errors. It is assumed that these random errors are normally distributedwith µ = 0 as mean value and the standard deviations σα, σε, and σt are given bythe measuring devices. For a radar with rotating antenna its angular velocity ω isalso subject to errors with σω as standard deviation.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 215

........................................................................................................................................................................................................................................................................................................................................................................................................................................................ ................................
................
................
................
................
................
................
................
................
................
................
................
................
................
................
.........................................
.......................................................................................................................................................................................................................................................
XR
YR
ZR
...........................................................................................................
.................................................
........................................................
....................................................................
..................
............AP
............1............A
............2
............3
............B ............4
.............
.............
.......y1
............................................................................z1 .................................................................................x1
.............
.......................................................................... ............. ............. ............. .............xAB
.........................................................................................................................................
R1
.........................................
RR1
xR1
.............................................................................
α1
..........................
..................................ε1
.........................................................................................................................
vA..................................
...................................... ................ vB
Figure 3: Radar reference frame with trajectory of mortar shell.
3.1 Variations of the predicted point of impact
As described, the ballistic coefficient c is used to determine the trajectory andpoint of impact. Hence, errors of the radar measurements are propagated by theballistic coefficient to the hit point and determine its desired variation. In order tocalculate the variation in range, the standard deviation of the ballistic coefficientσc is computed with the random errors of azimuth, elevation, and time by applyingthe laws of propagation of uncertainties:
σc =
√(∂c
∂xAB
)2
σ2xAB
+(
∂c
∂vxA
)2
σ2vxA
+(
∂c
∂vxB
)2
σ2vxB
(3)
where σxAB , σvxA, and σvxB
are computed from given σα and σt:
σxAB =
√√√√ 4∑j=1
(∂xAB
∂αj
)2
σ2α , σvxA
=
√√√√ 4∑j=1
(∂vxA
∂αj
)2
σ2α +
2∑k=1
(∂vxA
∂tk
)2
σ2t ,
and
σvxB=
√√√√ 4∑j=1
(∂vxB
∂αj
)2
σ2α +
4∑k=3
(∂vxB
∂tk
)2
σ2t .
The deviation of the angular velocity can be easily calculated with σt
σω =2πt2σt =
ω2
2πσt . (4)
Subsequently, the approach of varying failure parameters can be used tocalculate e.g. N = 1000 normally distributed random quantities of the ballisticcoefficient ci (i = 1 . . .N) with the mean value µc and standard deviation σc.These quantities are taken to determine the hit points xi by solving the system ofdifferential equations (1) numerically.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
216 Computational Ballistics III

In order to compute the variation in range with these x-coordinates of the hitpoint, the averaged quadratic deflection µ is determined [1]
µ =
√∑Ni=1 λ
2i
N − 1(5)
where λi = xi − xm is the so-called apparent error and xm = 1N
∑Ni=1 xi is an
averaged point of impact.Given µ and the u-quantile of the normal distribution, the variation in range of
the hit point lP at P% confidence level (C. L.) is calculated by [1]
lP = 2 uµ = 2PER . (6)
With the given errors of time and azimuth of the radar sensor, thevariation in deflection is directly calculated based on the locating geometryzi = Ri sinαi. Considering the worst case, the standard deviation σz =√
sin2 αi σ2R +R2
i cos2 αi σ2α reaches its maximum value for αi = π
2and can
be reduced to σz = σR. The range error of a radar is determined with the speed oflight c0 by σR = c0
2σt.
Similar to eqn. (6), the variation in deflection bP is determined by
bP = 2 u σz = 2PED . (7)
As final result, the CEP of the predicted hit point is determined with thevariations in range and deflection. Gilles [2] introduces a procedure to computethe CEP on the desired C. L. with the standard deviations in x and z as well asthe belonging covariance cov(x, z). As input parameters, the x-coordinates arealready calculated, while the z-coordinates are N = 1000 normally distributedrandom quantities generated with µz = 0 and σz = σR.
3.2 CEP simulations
For the following simulations, the commissioned radar systems MWRL-SWK(a Russian air surveillance radar for airports; σα = 0.033 deg , σR = 10 m, inRBS mode) and COBRA (a counter battery radar by Germany, France, and UK;σα = σR/R = 0.191 deg , σR = 50 m, system specification) may serve as typicalexamples (all radar and ammunition data throughout this paper are public domain).
An 82 mm-grenade with propellant charge O-832, No. 6 launched with M1937is chosen as RAM threat with the data v0 = 211 m/s, cnom = 2.11 m2/kg, andm = 3.31 kg.
Furthermore, the following data is given:
ω = 90 deg/s , α1 = 145 deg (MWRL-SWK);
α1 = 145 deg , α2 = 132, 7 deg , α3 = 114, 6 deg , α4 = 91, 2 deg (COBRA);
xAP = −2040 m , zAP = 1000 m .
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 217

The general simulation results are shown in fig. 4, while the data for the selectedradar sensors are tabulated in tab. 1 and integrated in fig. 4 for confidence levels of50%, 90%, and 99%. Designing an early warning system for military camps, theestimation of CEP = f(σα = σε, σt) allows the definition of the edge length ofplane squares in order to enable specific areal warnings to soldiers. Since a clearthreat direction is usually unknown, the camp shall be divided into squares with itsedge length given by the CEP
lP = 2CEP . (8)
For a very precise radar system like MWRL-SWK, its edge length is already46 m at 50% C. L. and 98 m for 90% C. L. These distances cannot be covered insuch short advance warning times of roughly 10 s. It also becomes clear that theCOBRA radar is insufficient for this task.
Table 1: Results of simulations for selected radar systems.
ccal. in m2/kg σc in m2/kg CEP in m
C. L. in % - 68.3 50.0 90.0 99.0
MWRL-SWK 2.187 0.070 22.6 48.7 75.1
COBRA 2.187 0.402 134.5 305.2 471.7
4 Ammunition consumption calculations
Intercepting a RAM target successfully requires fulfilling two conditions: at first,the kinetic energy of the sub-projectiles is sufficient to destroy the mortar grenadeand secondly, at least one pellet hits the shell. For this purpose, 35 mm x 228 Aheadammunition is examined consisting of Nf = 152 sub-projectiles and featuringfuze programming. Since the attempt of deflecting the grenade from its trajectorywith the momentum of a sub-projectile is practically not promising due to the massdifference of factor 102, this study concentrates on the physical destruction of themortar grenade.
4.1 Minimum energy for destruction of mortar grenades
The minimum energy to destruct a grenade is compounded by the kinetic energyto penetrate the shell and the potential energy to activate the explosive. At first, thewell-known formula of de Marre [3] is resolved for the desired minimum impactvelocity vmin of an sub-projectile in order to penetrate a armored steel plate withthickness D (in dm)
vmin(γ) =B d0.75
f D0.7
m0.5f cosnγ
(9)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
218 Computational Ballistics III

Table 2: Minimum energy destructing typical Russian mortar grenades.
caliber dM in mm 82 107 120 160 240
Dmax in mm 10.2 16.5 19.1 21.8 39.3
Emin in J γ = 0 deg 1160 2257 2756 3335 7563
Emin in J γ = 30 deg 1778 3467 4236 5126 11636
0 0.05 0.1 0.15 0.20
50
100
150
200
250
300
350
400
450
500
σα=σ
ε in °
CE
P in
m
82 mm, O−832, No. 6
50.0% C. L. 90.0% C. L. 99.0% C. L.
Figure 4: CEP = f(σα), σt = 200 ns(∗ – MWRL, ♦ – COBRA).
10 15 20 25 30 35 400
2
4
6
8
10
12
D in mm
Ege
s,m
in in
kJ
γ = 0° γ = 30° 82 mm, O−832 107 mm, OF−841A 120 mm, OF−843A 160 mm, F−853U 240 mm, F−864
Figure 5: Emin = f(D, γ).
where df – caliber of sub-projectile (df = 5.8 10−2 dm, estimated), mf – sub-projectile’s mass (mf = 3.3 10−3 kg), B – empirical factor (B = 2000, averagedvalue), γ – angle of impact (measured from plate’s normal) and n = 1.5 [3]. Forthis case, the maximum thickness of an 82 mm shell is set for D.
The energy to ignite the grenade’s explosive is calculated with the impactsensitivity for TNT mh = 1.5 kg m and the acceleration due to gravity. Finally,the overall minimum energy is
Emin(γ) =mf
2v2
min(γ) +mhg (10)
and is shown for several Russian mortar grenades and impact angles of γ =0 deg , 30 deg in fig. 5 as well as tab. 2.
Ideally, the internal energy Ei provided through an rigid body impact of thesub-projectile with the grenade needs to be greater than the minimum energyEmin = f(dM , γ) given in tab. 2. Due to the small amount of HE, the sub-projectiles are not accelerated after ignition. Therefore, the velocity of a sub-projectile is calculated with the velocity of the Ahead projectile at time of ignitionand decreased on its flight path because of air drag.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 219

4.2 Kill probability
In order to obtain a high kinetic energy for destruction, a frontal attack by an Aheadsub-projectile is considered as ideal case due to the high velocity difference of thesub-projectile and the grenade. Hence, the target area AT is calculated with thecaliber radius of the shell. However, the chance to hit the fuze of the grenade inorder to ignite it is not considered in this paper.
Calculating the hit probability of an sub-projectile at first, it is assumed• the cannon is calibrated (µy = µz = 0),• the ballistic deviation of cannon and ammunition is σy = σz = σb,• the hit pattern in Y and Z are regarded as independent (ρ = 0).
Thus, the probability pHF to hit a circle area in a Y -Z-plane with radius RM
with a single sub-projectile is based on the normal distribution [3]
pHF = 1 − e− R2
M2(u σb)2 . (11)
Since the target has also a dimension in the X-Y -plane, the hit probabilitypHt in this plane is determined with the Gaussian error function and the relativetarget length xrel = lM/σx applying the distribution function Φ of the normaldistribution
pHt = erf(x) = 2Φ(√
2x) − 12
(12)
where x is the input parameter determined as follows [1]:
x =u√2lMσx
where lM is the grenade’s length and the deviation σx =√σ2
xR + σ2xG consists
of the converted time deviation of the radar σxR = c02σtR and the converted time
resolution of the fuze σxG = vG σtG (vG – velocity of Ahead projectile). Finally,the desired hit probability of a single sub-projectile with the above probabilitiesbeing independently is
pH = pHF pHt . (13)
A single effective sub-projectile shall be able to destruct a grenade. Thus, thedestruction probability is calculated with the internal energy Ei [3]
pk|H = 1 − e− Ei
E0 , (14)
where E0 is given by the minimum energyEmin(γ) at γ = 0 deg.In conclusion, the kill probability of a single sub-projectile is
pK = pH pK|H . (15)
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
220 Computational Ballistics III

0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.050
20
40
60
80
100
120
140
160
σα=σε in °
Ns
50% C. L.
σt = 10 ns
σt = 50 ns
σt = 75 ns
σt = 100 ns
0.01 0.015 0.02 0.025 0.03 0.035 0.04 0.045 0.050
100
200
300
400
500
600
σα=σε in °
Ns
99% C. L.
σt = 10 ns
σt = 50 ns
σt = 75 ns
σt = 100 ns
Figure 6: NS = f(σα, σt) for 50% and 99% C. L. (∗ – MWRL-SWK).
4.3 Number of rounds
Calculating the kill probability of Nw effective sub-projectiles hitting the targetarea AT , it is assumed that the base area of the fragment cone AE equals the areaof the radar CEP ACEP (see fig. 1):
AE(P ) = ACEP (P ) = π (RR u σα)2 , (16)
where RR is the distance radar – located grenade and σα is the radar’s azimuthdeviation assuming σα = σε.ACEP is valid for a given probabilityP (via quantileu) that the grenade is located within this area.
The required probability that at least one out of Nw sub-projectiles hits anddestructs the target is given by [3]
pK,Nw(P ) = 1 − (1 − pK)Nw(P ) , (17)
where Nw(P ) = ρf (P )AT = Nf
AE(P )AT . This leads to the wanted ammunition
consumption, i. e. the number of rounds NS to destroy the target with an overall-kill probability P
NS(P ) =⌈
1pK,Nw (P )
⌉. (18)
4.4 Simulation results
This subsection contains the simulation parameters and results to battle an 82 mmgrenade with Ahead ammunition strongly depending on the radar errors. The battledistance is supposed to be 1000 m. Estimating the velocity of an Ahead sub-projectile at this point and considering the slowest trajectory velocity of an 82 mmshell fired on maximum distance, the internal energy Ei is 1580 J. Hence, thedestruction probability pk|H is 74.4%.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 221

Table 3: Simulation results for MWRL-SWK radar.
C. L. in % ACEP in m2 hK in m pK in % ρf in 1/m2 Nw NS
50 0.47 2.1 1.3 321 1.7 46
90 2.82 5.2 3.2 54 0.3 110
99 6.91 8.1 5.0 22 0.1 171
In addition to the parameters already given, the quantities are as follows:
lM = 329 mm , σb = 0.3 mil = 0.0169 deg , σtG = 2 ms , RR = 1000 m.
For several overall-kill probabilities P , the results are shown in fig. 6 and intab. 3. They reveal that even with a precise radar like MWRL-SWK an ammunitionconsumption NS < 100 can be obtained only for probabilities P 90%.Furthermore, the distance of the point of ignition to the impact point needs tobe short enough such that the sub-projectile’s kinetic energy exceeds the minimumenergy of Emin = 1160 J. This condition is not fulfilled for P = 99% in tab. 3.
5 Conclusions
The protection of military camps underlying the threat of attacks by mortargrenades is studied by implementing an early warning system and an air defensesystem to destroy an approaching shell. The basic mathematical principles aregiven in order to evaluate or design sensors and ammunition with preformed ornatural fragments as well. The study yielded the following most relevant results:
• Determining the CEP = f(σα, σt) in order to define the edge lengthof plane warning squares in the military camp, the sensor precision is thebottleneck. Even a very precise radar system like MWRL-SWK (σα = 2′,σR = 10 m) provides edge lengths of almost 50 m at 50% and 100 m at 99%C. L. This is impractical considering warning times in a scale of 10 s.
• Therefore, a frontal attack of 82 mm mortar grenades with a cloudof 152 sub-projectiles originated from 35 mm Ahead ammunition isinvestigated. However, the ammunition consumption at 99% C. L. amountsto 171 shots. The low initial velocity of the sub-projectiles associated witha small mass, a strongly limited number of sub-projectiles, and a very smallcone angle β of approximately 10 deg restricts the kinetic energy and thehit probability severely. For these reasons, the Ahead ammunition is hardlysuited for this application.
• The artillery radar COBRA is completely inappropriate as sensor for bothsupposed systems.
Considering decisive follow-on tasks in this field, the application of large-caliber HE projectiles instead of Ahead ammunition shall be investigated. In
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
222 Computational Ballistics III

addition, the complex combat procedure with detection, tracking, fire control, andinterception should be simulated for different threat scenarios.
References
[1] Athen, H., Ballistik. Quelle & Meyer: Heidelberg, Germany, 1958.[2] Gilles, J.T., Computation of the Circular Error Probability Integral. Systems
Reseach Center, University of Maryland, 1991.[3] Germershausen, R., Waffentechnisches Taschenbuch. Rheinmetall GmbH:
Duesseldorf, Germany, 1977.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 223

This page intentionally left blank

Empirical relationship for muzzle exit pressure in a 155 mm gun tube
D. Carlucci & J. Vega Analysis and Evaluation Technology Division, U. S Army Armament Research, Development & Engineering Center,
Abstract
The development of guided artillery projectiles has uncovered a need for the
deployable fins that open upon muzzle exit. Knowledge of this base pressure drop is also important for the electronics designer because so-called “set-forward” (the rapid “un-springing” of the projectile as it leaves the muzzle of the gun) has been identified as the cause of many component failures. An empirical relationship is developed for the base pressure drop in a 155 mm gun tube. This tube utilized a standard double-baffle muzzle brake. Several Instrumented Ballistic Test Projectiles (IBTP) were fired at various charge zones and the base pressure drops were compared and curve fits developed. A basic exponential decay curve with averaged coefficients was developed from the data. This empirical model can be utilized by researchers performing Computational Fluid Dynamics calculations as a check on results generated for the double baffle muzzle brake configuration. Keywords: gun launch, gun hardening, muzzle exit, shot exit, electronics, MEMS, projectile dynamics, in-bore dynamics.
1 Muzzle exit behavior of projectiles
With today’s focus on guided, smart projectiles, more and more designs are being developed that employ fins or other stabilization devices that are activated upon muzzle exit. This muzzle exit activation requires detailed knowledge of the pressure field to insure that these devices open uniformly and reliably.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 225
doi:10.2495/CBAL070211
understanding of muzzle exit flows due to the common practice of designing
Picatinny Arsenal, Dover, NJ 07806-5000, USA

The set-forward effects or “un-springing” of the projectile as it leaves the muzzle of the weapon is a major reliability concern for gun launch electronics [1, 2] therefore an understanding of the time-dependent pressure field is critical. In most instances the flow field at the muzzle of the weapon is a time-dependent jet flow complicated by one or more of the following: the presence of a muzzle brake; the two-phase nature of the propellant gas; the continued reaction of the burning propellant with its gaseous products and the atmosphere; compressibility effects and the presence of the moving projectile. The complicated nature of this problem usually forces the designer to move directly into a Computational Fluid Dynamics (CFD) model with some degree of simplification. One of the challenges that occur frequently in CFD is obtaining model confidence without hard data to validate against. The purpose of this paper is to provide useful data for the CFD researcher to validate against. Due to funding limitations data was only taken in a standard double baffle muzzle brake mounted on a U.S. M198 155 mm howitzer at different charge zones. It is hoped that this data will be useful in model validation.
2 Measurement technique
Data were obtained in 9 different firings at three different charge zones (i.e. three different propellant amounts) using an Instrumented Ballistic Test Projectile (IBTP). Table 1 specifies the pressures obtained in the firings while Figure 1 depicts the IBTP. The pressures were gathered from a pressure transducer mounted in the base of the projectile. The data obtained in these tests are shown as Figure 2. We note that for space reasons these curves have been compressed to fit in a small area therefore the scales are not particularly legible. They are intended to provide the reader with a qualitative feel for the data. The interested reader is invited to contact the authors for full sized plots. In each case the pressure drop at muzzle exit is compared to filtered data resulting in the smooth curves. These curves were then used to determine the exponent β tabulated in Table 1.
3 Pressure drop model
The curve fit that best described the pressure drop across all firing conditions was an exponential decay of the form:
tes eptp β−=)( (1)
Here ps(t) is the base pressure acting on the projectile, pe is the pressure acting on the base at the instant the aft end of the projectile clears the bore of the gun, t is the time in seconds from bore exit and β is an exponential decay factor established from the smoothed data. Table 1 shows the values of pe and β obtained from the test as well as peak values of pressure (pmax) that occurred in the bore of the weapon measured with the pressure gage in the base of the IBTP.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
226 Computational Ballistics III

A mean value of β was determined to be 5,577 with a standard deviation of 1,117. While this may seem to be fairly uncorrelated this model has actually helped the U.S. Army design gun launch electronics of very high reliability [4].
4 Uses of the model
There are, in general two uses for the model: CFD validation and structural modelling of projectiles. In the former case the relationship is used directly to compare base pressure measurements to the model results as the projectile leaves the muzzle of the weapon. In the latter case the pressure decay curve model is actually inserted at the proper time phasing in a finite element analysis to examine the response of the structure to the pressure drop. Alternatively the model can be modified as an acceleration time curve and used directly as a forcing function on a projectile.
Figure 1: Instrumented Ballistic Test Projectile (IBTP).
Table 1: Firing data from IBTP tests.
pmax (PSI)
pe (PSI )
β
TM2 53096 9848 6500 TM3 54648 9989 6500 TM4 39707 8551 5000 TM5 42440 8751 5000 TM6 51059 9364 5500 TM7 46844 9354 7000 TM8 47729 9771 7000 TM9 29556 8457 6000 TM22 44000 6708 3500
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 227

5 Conclusions
A pressure decay model has been established for a double baffle muzzle brake configuration. This model has been shown to yield highly reliable projectile structures when used as either a CFD validation tool and as a structural model input. Future work will include pressure decay comparisons on tubes of various calibres using differing muzzle brake configurations.
Figure 2: Qualitative plots of pressure drop at muzzle exit.
References
[1] D. Carlucci, J. Cordes, S. Morris, R. Gast, Muzzle Exit (Set Forward) Effects on Projectile Dynamics, Technical Report ARAET-TR-06003, U.S. Army Armament Research Development and Engineering Center, Dover, NJ, April 2006.
[2] D. Carlucci, J. A. Cordes, J. Hahn, A. Frydman, Electronics and the Gun Environment, Invited Paper, U.S. Army Workshop on Advanced Active Thin Film Materials for the Next Generation of Meso-Micro Scale Army Applications, May 2005.
[3] M. Hollis, B. Flyash, A. Bahia, J. Potucek, D. Carlucci, Empirical Measurements of Cannon Launch Pressures on a Finned 155-mm
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012 0.0014 0.0016 0.0018 0.002 0.0022 0.0024 0.0026-2000
0
2000
4000
6000
8000
10000
12000
W35: W27; overplot(9848*exp(-6000*x), lred)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012 0.0014 0.0016 0.0018 0.002 0.0022 0.0024 0.0026-2000
0
2000
4000
6000
8000
10000
12000
14000
16000 W36: W28; overplot(14069*exp(-6000*x), lred)
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035-2000
0
2000
4000
6000
8000
10000
W37: W29; overplot(8551*exp(-5000*x), lred)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012 0.0014 0.0016 0.0018 0.002 0.0022 0.0024 0.0026 0.0028-2000
0
2000
4000
6000
8000
10000 W38: W30; overplot(8751*exp(-5000*x), lred)
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004-2000
0
2000
4000
6000
8000
10000 W39: W31; overplot(9364*exp(-5500*x), lred)
0 0.0002 0.0004 0.0006 0.0008 0.001 0.0012 0.0014 0.0016 0.0018 0.002 0.0022 0.0024 0.0026-2000
0
2000
4000
6000
8000
10000
12000 W40: W32; overplot(9354*exp(-6500*x), lred)
0 0.0005 0.001 0.0015 0.002 0.0025 0.003-2000
0
2000
4000
6000
8000
10000
12000 W41: W33; overplot(9771*exp(-6500*x), lred)
0 0.0005 0.001 0.0015 0.002 0.0025 0.003 0.0035 0.004 0.0045-2000
0
2000
4000
6000
8000
10000 W42: W34; overplot(8457*exp(-6000*x), lred)
0 0.001 0.002 0.003 0.004 0.005 0.006 0.007-1000
0
1000
2000
3000
4000
5000
6000
7000
8000 W45: W3; overplot(6700*exp(-3500*x), lred)
TM2
TM7 TM6TM5
TM4 TM3
TM22 TM9 TM8
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
228 Computational Ballistics III

Artillery Projectile, 21st International Symposium on Ballistics, 19-23 April 2004.
[4] Cordes, J. A., Carlucci, D. E., Kalinowski, J., Reinhardt, L, “Design and Development of Reliable Gun-Fired Structures,” DTIC Technical Report ADA455406, U.S. Army Armament Research Development and Engineering Center, Dover, NJ, June, 2006.
© 2007 WIT PressWIT Transactions on Modelling and Simulation, Vol 45, www.witpress.com, ISSN 1743-355X (on-line)
Computational Ballistics III 229

This page intentionally left blank

Author Index
Alves A. S................................ 171 Baker E. L........................ 163, 181 Bonora N.................................. 131 Carlucci D................................ 225 Chen M. ..................................... 77 Chin C...................................... 163 Costello M. ................................ 31 Czarnetzki W. ............................ 21 Degiovanni M. ......................... 131 Di Sciuva M............................. 131 Ebecken N. F. F. .............. 123, 171 Fatsis A. ................................... 141 Founti M. ................................. 141 Frola C. .................................... 131 Fuchs B. E................................ 163 Gherlone M.............................. 131 Gold V. M................................ 181 Graswald M. ............................ 213 Greatrix D. R. ............................ 57 Hackett R. M............................ 109 Hountalas D. T......................... 141 Kokes J. ..................................... 31 Krallis K. ................................. 141 Kuhrt A. ................................... 153 Maier T. ..................................... 21 Mattone M. .............................. 131
Minnicino M............................ 193 Motta A. A....................... 123, 171 Netto T. A................................ 123 Orfanoudakis Ν. G................... 141 Peles S. ...................................... 13 Peratta A. ................................... 67 Peratta C. ................................... 67 Pham J. .................................... 163 Pincay J. M. ............................. 181 Powers B.................................. 193 Rangaswamy P. ....................... 109 Roetzel W. ................................. 21 Rothe H............................ 153, 213 Ruggiero A. ............................. 131 Sahu J. ................................... 3, 31 Scheffler D. R. ........................... 99 Schmidt E. ............................... 203 Shaydurov I. ............................ 213 Silva E. A. P. ........................... 123 South J. .................................... 193 Touati D..................................... 13 Tzeng J..................................... 203 Vega J. ..................................... 225 Vlachakis N. ............................ 141 Walters W. P.............................. 99 Wells J. M.................................. 89
Computational Ballistics III 231

This page intentionally left blank

...for scientists by scientists
Fracture and Damageof CompositesEdited by: M. GUAGLIANO, Politecnicodi Milano, Italy and M.H. ALIABADI,Imperial College, London, UK
This book contains up-to-date contributionson areas such as: Compressive Strength ofLaminated Composites - On Application ofthe Continuum Fracture Theory;Macroscopic Crack Propagation Due toStress-Corrosion Cracking in UnidirectionalGRP Composites - Micromechanical Theoryand Its Application; Fatigue Damage ofParticle Reinforced Metal Matrix Composites;Modeling and Prediction of the MechanicalProperties of Woven Laminates by the FiniteElement Method; Boundary ElementAnalysis of Fracture Failure in AnisotropicComposite Laminates; and Analysis ofPiezoelectric Composite Laminates withEdge Delamination.
Series: Advances in Fracture Mechanics,Vol 8
ISBN: 1-85312-669-1 2006 304pp£97.00/US$175.00/€145.50
ComputationalBallistics IIEdited by: V. SÁNCHEZ-GÁLVEZ, UnivPolitecnica de Madrid, Spain, C.A.BREBBIA, Wessex Institute of Technology,UK, A.A. MOTTA, Brazilian NavyResearch Institute, Brazil,C.E. ANDERSON, Southwest ResearchInstitute, USA
This book features most of the paperspresented at the second InternationalConference on Computational Ballistics 2005.The contents stress the importance andpossibilities of numerical simulation oninternal, external and terminal ballistics, todescribe, analyse, predict and subsequentlyreduce the experimental requirements inballistics.Ballistics, as a science, relates to a great varietyof phenomena that occurs from the momentan object or projectile is fired until its effectsare observed in a target. Ballistic studiesinclude applications as varied as the study ofthe structural and control behaviour ofrockets and satellites; strikes on aircraft,terrorist attacks and automobilecrashworthiness modelling, to name but afew. Many of the basic problems of ballisticsare similar to those in other fields ofapplications, such as combustion, heatconduction, in-flight structural behaviour,trajectory related issues, contact, impact,penetration, structural response to shockwaves and many others.This book, which is an important addition tothe literature, contains a wide variety of topicsincluding: Terminal ballistics; Fluid-structureinteraction; Perforation and penetrationmechanics; High rate loads, shock and impact;Interior ballistics; Fluid flow andAerodynamics and Systems and Technology.
WIT Transactions on Modelling andSimulation, Vol 40
ISBN: 1-84564-015-2 2005 416pp£146.00/US$234.00/€219.00
Find us athttp://www.witpress.com
Save 10% when you order from our encryptedordering service on the web using your credit card.
WIT eLibraryHome of the Transactions of the WessexInstitute, the WIT electronic-libraryprovides the international scientificcommunity with immediate and permanentaccess to individual papers presented atWIT conferences. Visitors to the WITeLibrary can freely browse and searchabstracts of all papers in the collectionbefore progressing to download their fulltext.
Visit the WIT eLibrary athttp://library.witpress.com

...for scientists by scientists
How Gears BreakB. ABERŠEK and J. FLAŠKER,University of Maribor, Slovenia
This book provides an in-depth study ofthe failure mechanisms of gears anddescribes how simulation models can bedeveloped to complement or replaceexperimental tests.The authors first introduce the physicalprocesses of failure and explain how toanalyse these using fracture mechanics.Much of the following text is devoted tomathematical models and formulations thatcan be used to predict how cracks behave ingears, together with special techniquesdeveloped by the authors. The concludingsection describes an expert system devisedby them for the design of gear assemblies.References are included at the end of eachchapter.
Series: Advances in Damage Mechanics,Vol 7
ISBN: 1-85312-739-6 2004 240pp£81.00/US$130.00/€121.50
Advances in Fatigue,Fracture and DamageAssessment ofMaterialsEdited by: A. VARVANI-FARAHANI,Ryerson University, Canada
The damage analysis of engineeringmaterials and components is a prime concernin the durability assessment and integrity ofengineering components in service.Engineering materials are routinelysubjected to failure in a wide variety ofapplications in aeronautical, electronic,automotive, nuclear plant, petroleum andtransportation industries.This book presents the fundamental elementsand theories in fracture and damage analysis,plus the recent research and advances in thedevelopment of the analytical and practicalapproaches required to assess the materialsdamage and the durability of structures.The wide-ranging discussion on damagetheories and practical issues in damageanalysis will be of benefit to researchers,post-graduate students and engineers inpractical sectors of durability and failure ofmaterials and structures.
Series: Advances in Damage Mechanics,Vol 6
ISBN: 1-85312-836-8 2005 520pp£170.00/US$290.00/€255.00
Crack DynamicsEdited by: A. IVANKOVIC, UniversityCollege Dublin, Ireland andM.H. ALIABADI, Queen Mary College,University of London, UK
Covering various aspects of dynamicfractures this book contains state-of-the-artcontributions from leading scientists in the
field.Contents: Dual Boundary Element Methodfor 3D Dynamic Crack Problems;Modelling of Fracture Processes During FastCrack Growth; Transient Dynamic CrackAnalysis in Anisotropic Solids; Evolutionof Dynamic Fractures in PMMA –Experimental and Numerical Investigations;The Mechanism of Dynamic CrackPropagation.
Series: Advances in Fracture Mechanics,Vol 9
ISBN: 1-85312-948-8 2005 224pp£83.00/US$133.00/€124.50
All prices correct at time of going to press butsubject to change.
WIT Press books are available through yourbookseller or direct from the publisher.

...for scientists by scientists
Macro andMicroscopicApproach to FractureEdited by: S.-I. NISHIDA, SagaUniversity, Japan
Written by internationally recognizedspecialists, this book covers a wide range oftopics associated with application and testingmethods for the assessment of risk andperformance behavior. A key reference forpostgraduate students, lecturers andresearchers working in this area, the text isdesigned to enhance the knowledge andappreciation of engineering integrity and itsrelevance to economic and strategic issues.Partial Contents: Fatigue Properties ofAustenitic Stainless Steels; Highly AccurateAnalysis of Stress Intensity Factors by theCrack Tip Stress Method in FEM;Characteristics of Fatigue Behavior ofSurface Modified Materials; Macro- andMicroscopic Approach to Fracture of HighStrength Steel Notched Bars; NondestructiveMonitoring of Fracture Behavior of Materialsusing Acoustic Emission.
Series: Advances in Damage Mechanics,Vol 3
ISBN: 1-85312-902-X 2004 352pp£105.00/US$168.00/€157.50
Multiple CrackProblems in ElasticityY.Z. CHEN, Jiangsu University, China, N.HASEBE, Nagoya Institute of Technology,Japan and K.Y. LEE, Yonsei University,South Korea
“...a useful addition to the literature.”MATHEMATICAL REVIEWS
In this volume various integral equationsfor multiple crack problems in planeelasticity are investigated. Formulation of
the problems is based on relevant elementarysolutions in which the complex variablefunction method is used.The multiple crack problem is considered asa superposition of many single crackproblems while many more complicatedcases are covered.Miscellaneous problems, including themultiple rigid line problem and the multiplecircular hole problem are studied. Solutionsfor three-dimensional multiple crackproblems are also investigated by using theFredholm integral equation, thehypersingular integral equation and thevariational principle. Many programs formultiple crack problems using FORTRANare featured. A CD-ROM containingsolutions is also included.
Series: Advances in Damage Mechanics,Vol 4
ISBN: 1-85312-903-8 2003356pp+CD-ROM£129.00/US$206.00/€193.50
Fatigue Damage ofMaterialsExperiment and AnalysisEdited by: A. VARVANI-FARAHANI,Ryerson University, Canada andC.A. BREBBIA, Wessex Institute ofTechnology, UK
Focusing on recent advances in thedevelopment of methods to predict fatigueperformance, this book contains papers fromthe First International Conference on FatigueDamage of Materials. The coverage is broadencompassing a range of materials andstructures.
WIT Transactions on EngineeringSciences, Vol 40
ISBN: 1-85312-979-8 2003 528pp£158.00/US$249.00/€237.00

...for scientists by scientists
Find us athttp://www.witpress.com
Save 10% when you order from our encryptedordering service on the web using your credit card.
Boundary ElementAnalysis of Cracks inShear DeformablePlates and ShellsT. DIRGANTARA, Institut TeknologiBandung, Indonesia
In this book the author gives a new set ofboundary element formulations for thesolution of bending problems in plates andshells. These are based on modified Reissnerplate and two-dimensional plane stressgoverning equations.
Series: Topics in Engineering, Vol 43
ISBN: 1-85312-950-X 2002 272pp£109.00/US$169.00/€163.50
Nonlinear Fractureand DamageMechanicsEdited by: M.H. ALIABADI, Queen MaryCollege, University of London, UK
Incorporating recent research, this bookpresents theoretical and computationalmethods for problems in this field.Partial Contents: Analysis of Crack Growthin Residual Stress Fields; Constitutive-Microdamage Description of DuctileDynamic Fracture;A Complete Gurson Model.
Series: Advances in Fracture Mechanics,Vol 4
ISBN: 1-85312-508-3 2001 264pp£99.00/US$153.00/€148.50
ThermomechanicalFatigue and FractureEdited by: M.H. ALIABADI, Queen MaryCollege, University of London, UK
Thermal and mechanical fatigue leads toinitiation and growth of cracks in manystructures. This book brings together up-to-date contributions from leadingspecialists.Partial Contents: ThermomechanicalCrack Growth using Boundary Elements;Prediction of Crack Initiation and Growthunder Thermal Fatigue; The Saturation ofThermomechanical Fatigue Damage inBrittle Materials; Plasticity Induced Heatingin the Fracture and Cutting of Metals; Effectsof Residual Stress on Thermal FatiguePhenomena of Aluminium Die Casting Dies.
Series: Advances in Fracture Mechanics,Vol 7
ISBN: 1-85312-549-0 2002 344pp£115.00/US$173.00/€172.50
WITPressAshurst Lodge, Ashurst, Southampton,SO40 7AA, UK.Tel: 44 (0) 238 029 3223Fax: 44 (0) 238 029 2853E-Mail: [email protected]
Fracture of RockEdited by: M.H. ALIABADI, Queen MaryCollege, University of London, UK
This volume covers a wide range of subjects,including hydraulic fracturing, blasting andfragmentation, transport problems and creep.
Series: Advances in Fracture Mechanics,Vol 5
ISBN: 1-85312-542-3 1999 440pp£155.00/US$248.00/€232.50