Applied Optimization: Formulation and Algorithms for Engineering ...

COMPREHENSIVE DISTRIBUTION POWER FLOW: MODELING, FORMULATION, SOLUTION
ALGORITHMS AND ANALYSIS
A Dissertation
Presented to the Faculty of the Graduate School
of Cornell University
in Partial Fulfillment of the Requirements for the Degree of
Doctor of Philosophy
by
Ray Daniel Zimmerman
January 1995

© Ray Daniel Zimmerman 1995ALL RIGHTS RESERVED

COMPREHENSIVE DISTRIBUTION POWER FLOW: MODELING, FORMULATION, SOLUTION ALGORITHMS AND ANALYSIS
Ray Daniel Zimmerman, Ph.D.
Cornell University 1995
The objective of this work was to develop a formulation and an effi-
cient solution algorithm for the distribution power flow problem which
takes into account the detailed and extensive modeling necessary for use in
the distribution automation environment of a real world electric power dis-
tribution system.
The formulations for the three classes of existing algorithms for radial
systems were generalized and were extended to handle the comprehensive
modeling already presented in the context of more traditional but less effi-
cient methods, such as Newton-Raphson and Implicit Zbus Gauss. The
modeling includes unbalanced three-phase, two-phase, and single-phase
branches, constant power, constant current, and constant impedance loads
connected in wye or delta formations, cogenerators, shunt capacitors, line
charging capacitance, switches, and three-phase transformers of various
connection types.
The three classes of algorithms explored are: network reduction meth-
ods, backward/forward sweep methods, and fast decoupled methods.
Within each of the three classes, new algorithms were developed and exist-
ing methods were extended to include the comprehensive modeling of the
general formulation. Proofs of convergence for the backward/forward
sweep and fast decoupled methods are also provided.
In addition to the radial algorithms, the compensation method used to
handle weakly meshed systems was generalized to encompass three-phase
networks with loops, multiple sources, and three-phase PV buses. This
compensation method can be applied in conjunction with any of the radial
power flow solvers. Termination of the radial solver, at each iteration, is
based on an adaptive criterion. A generalized correction step for the com-
pensation method was also developed.
All of the proposed methods were evaluated and compared on various
test systems based on data from real distribution systems. The test sys-
tems range in size from 63 buses to over 1000 buses. The most efficient
algorithm in each class was shown to require significantly less computa-
tion than both the Newton-Raphson and the Implicit Zbus Gauss methods,
with the backward/forward sweep and fast decoupled methods typically
showing an improvement of more than a factor of three.

iii
BIOGRAPHICAL SKETCH
Ray Daniel Zimmerman was born in Ephrata, PA on December 17,
1965. Four years later he moved with his family to a chicken farm in rural
Lancaster County, PA, where he lived until he began studying Electrical
Engineering in September of 1984. As an undergraduate at Drexel Univer-
sity in Philadelphia, PA, he participated in a cooperative education pro-
gram which involved working for six month periods at each of the following
companies: IBM Corporation, Research Triangle Park, NC, Evaluation
Associates, Bala Cynwyd, PA, and UNISYS Corporation, Tredyffrin, PA.
He received a Bachelor of Science degree in Electrical Engineering from
Drexel University in June, 1989. In August of
the same year he began graduate studies in
Electrical Engineering at Cornell University in
Ithaca, NY, where he received a Master of Sci-
ence degree in May, 1992, in the area of network
reconfiguration in electric power distribution
systems.

iv
to my wife, Esther
and my daughter, Ana
v
ACKNOWLEDGMENTS
Pero habiendo obtenido auxilio de Dios, persevero hasta el día de hoy. — Hechos 26:22
I would like to express my appreciation to my advisor, Dr. Hsiao-Dong
Chiang, for his support and direction for this work. I would also like to
thank Dr. James S. Thorp and Dr. Lloyd N. Trefethen for serving on my
committee. My appreciation also goes to Gary Darling of New York State
Gas & Electric and Matt Downey of Rochester Gas & Electric for providing
the data used for testing the methods developed in this work.
Several friends have been helpful throughout the various stages of
this work, whether through discussions of technical issues or simply with
helpful perspective on the process of getting a doctorate. In particular, I
would like to acknowledge Guerney Hunt, Jen-Lun Yuan, Yi-Jen Chiu,
Jianzhong Tong, and Karen Nan Miu. A special thanks to Karen for taking
the time to read this dissertation and make helpful comments to improve
its readability. I would also like to express my appreciation to Ernie for his
help in proofreading.
Most of all, I appreciate the constant support of my family, especially
during the final months of writing. Quisiera agradecer primero a Esther
por su amor y apoyo constante. Y gracias, Anita, por el ánimo que me das
solo verte crecer cada día. Gracias también por ser la compañerita de
mamá durante este tiempo difícil.
vi
TABLE OF CONTENTS
ABSTRACT
BIOGRAPHICAL SKETCH ...............................................................................................iiiACKNOWLEDGMENTS .....................................................................................................vTABLE OF CONTENTS ................................................................................................... viLIST OF TABLES..............................................................................................................xLIST OF FIGURES ......................................................................................................... xii
1 Introduction 11.1 Background.....................................................................................................11.2 Objectives and Contributions..........................................................................3
2 Basic Problem Framework 72.1 Mathematical Notation....................................................................................72.2 Bus and Lateral Indexing................................................................................8
2.2.1 Indexing Scheme.................................................................................92.2.2 Indexing Implementation..................................................................11
2.2.2.1 Connectivity Data Structures................................................112.2.2.2 Breadth-First Search .............................................................12
2.3 Basic System Model .....................................................................................152.3.1 Voltage and Current/Power Flow Update for Branch k ...................182.3.2 Application of KCL ..........................................................................19
3 Detailed Component Models 213.1 Load Model...................................................................................................23
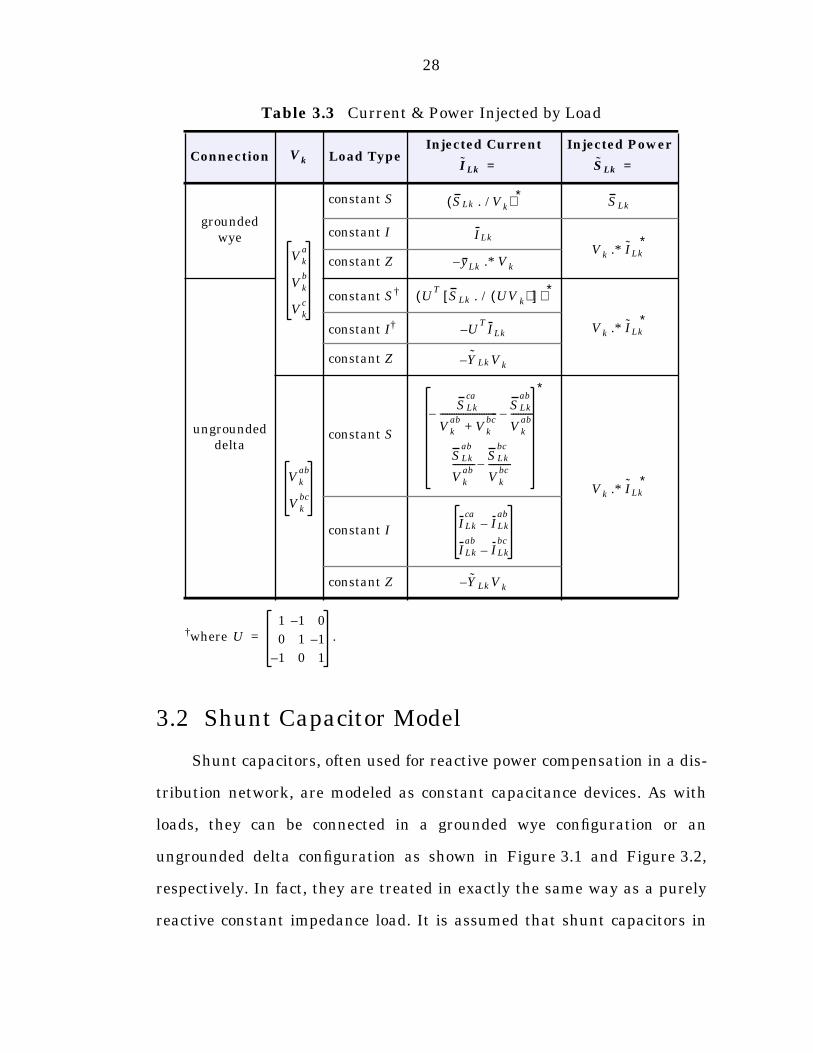
3.1.1 Admittance Matrix for the Load .......................................................263.1.2 Current and Power Injected by the Load ..........................................27
3.2 Shunt Capacitor Model .................................................................................283.3 Cogenerator Model .......................................................................................293.4 Distribution Line Model ...............................................................................313.5 Switch Model................................................................................................333.6 Transformer Model.......................................................................................34
3.6.1 Class A: Primary and Secondary both Grounded or both Ungrounded ..........................................35
3.6.2 Class B: Grounded Primary—Ungrounded Secondary ....................353.6.3 Class C: Ungrounded Primary—Grounded Secondary ....................39
vii
4 Network Reduction Power Flow Algorithms for Radial Systems (NR-PARS) 42
4.1 Detailed Solution Algorithm.........................................................................434.1.1 Linearization .....................................................................................444.1.2 Build Driving Point Equivalents.......................................................454.1.3 Calculate Voltages and Currents.......................................................494.1.4 Termination Criterion .......................................................................51
4.2 Implementation .............................................................................................514.2.1 Linearity Check.................................................................................514.2.2 Improved Line Update......................................................................524.2.3 Storage of Intermediate Variables ....................................................52
4.3 Variations......................................................................................................534.4 Convergence Analysis ..................................................................................554.5 Comments .....................................................................................................55
5 Backward/Forward Sweep Power Flow Algorithms for Radial Systems (BFS-PARS) 57
5.1 Detailed Solution Algorithm.........................................................................585.1.1 Backward Sweep...............................................................................605.1.2 Forward Sweep .................................................................................625.1.3 Termination Criterion .......................................................................65
5.2 Implementation .............................................................................................665.2.1 Class B Transformers........................................................................66
5.2.1.1 Backward Sweep...................................................................665.2.1.2 Forward Sweep .....................................................................67
5.2.2 Class C Transformers........................................................................695.2.2.1 Forward Sweep .....................................................................695.2.2.2 Backward Sweep...................................................................70
5.3 Variations......................................................................................................725.3.1 VI-VI-PARS .......................................................................................725.3.2 VS-VS-PARS......................................................................................735.3.3 V-VI-PARS ........................................................................................755.3.4 V-VS-PARS........................................................................................755.3.5 VI-I-PARS .........................................................................................765.3.6 VS-S-PARS ........................................................................................765.3.7 V-I-PARS...........................................................................................765.3.8 V-S-PARS ..........................................................................................77
5.4 Convergence Analysis ..................................................................................775.5 Comments .....................................................................................................83
viii
6 Fast Decoupled Power Flow Algorithms for Radial Systems (DePARS) 846.1 Detailed Solution Algorithm.........................................................................85
6.1.1 Reduced Power Flow Equations.......................................................876.1.1.1 Single Feeder ........................................................................886.1.1.2 General Radial Structure.......................................................896.1.1.3 Class B and Class C Transformers........................................93
6.1.2 Update of Independent Variables......................................................946.1.2.1 Structure of the System Jacobian..........................................956.1.2.2 Numerical Properties of the System Jacobian ....................1006.1.2.3 Transformers.......................................................................1036.1.2.4 Solving for the Update........................................................107
6.1.3 Termination Criterion .....................................................................1076.2 Implementation ...........................................................................................1096.3 Variations....................................................................................................110
6.3.1 VI-DePARS .....................................................................................1116.3.2 VS-DePARS.....................................................................................1116.3.3 I-DePARS ........................................................................................112
6.3.3.1 Reduced Power Flow Equations.........................................1136.3.3.2 Update of the Independent Variables..................................1166.3.3.3 Implementation ...................................................................120
6.3.4 S-DePARS .......................................................................................1226.4 Convergence Analysis ................................................................................1236.5 Comments ...................................................................................................126
7 Power Flow Algorithms for Weakly Meshed Systems (PAWMS) 1277.1 Detailed Solution Algorithm.......................................................................128
7.1.1 Loop Breakpoint Creation...............................................................1307.1.2 Breakpoint Voltage Mismatch........................................................1317.1.3 Breakpoint Impedance Matrix ........................................................1327.1.4 Breakpoint Injections......................................................................1347.1.5 Multiple Sources.............................................................................1357.1.6 PV Buses.........................................................................................1367.1.7 Summary.........................................................................................1407.1.8 Termination Criterion .....................................................................140
7.2 Implementation ...........................................................................................1417.2.1 Modeling Limitations and Simplifying Assumptions.....................1417.2.2 Termination of Radial Power Flow.................................................141
7.3 Variations....................................................................................................1427.3.1 Power Injection for Loop Breakpoints............................................1437.3.2 Correction Step ...............................................................................144
7.4 Comments ...................................................................................................146
ix
8 Simulation Results 1488.1 Summary of Algorithms Tested..................................................................150
8.1.1 Newton-Raphson Method...............................................................1508.1.2 Implicit Zbus Gauss Method............................................................152
8.2 Description of Test Systems .......................................................................1548.3 Power Flow Algorithms for Radial Systems (PARS) .................................155
8.3.1 Effect of Load Model and Load Factor on Convergence ...............1608.3.2 Effect of System Size on Convergence...........................................163
8.4 Power Flow Algorithms for Weakly Meshed Systems (PAWMS)..............1658.4.1 Effect of PARS Termination Criterion on Convergence.................1668.4.2 Effect of Number of Loops on Convergence..................................1688.4.3 Effect of Load Model on Convergence...........................................171
8.5 Summary.....................................................................................................172
9 Conclusions 1759.1 Contributions...............................................................................................1759.2 Future Work................................................................................................178
BIBLIOGRAPHY ...........................................................................................................180

x
LIST OF TABLES
Table 2.1 Mathematical Notation..............................................................................8Table 2.2 Bus Indexing Implementation.................................................................14Table 2.3 General Update Formulas .......................................................................17Table 2.4 Implementation of (2.2) ..........................................................................18Table 2.5 Implementation of (2.3) ..........................................................................18Table 2.6 General Branch Update Formulas...........................................................20
Table 3.1 Load Parameters from Nominal Loads...................................................25Table 3.2 Load Admittance.....................................................................................27Table 3.3 Current & Power Injected by Load.........................................................28Table 3.4 Shunt Capacitor Admittance, Current & Power Injection ......................29Table 3.5 Cogenerator Admittance, Current & Power Injection ............................30Table 3.6 Update Formulas for Distribution Lines.................................................32Table 3.7 Update Formulas for Switches................................................................34Table 3.8 Admittance Matrices for Common Transformer Connections ...............36Table 3.9 Update Formulas for Class A Transformers...........................................37Table 3.10 Update Formulas for Class B Transformers ...........................................39Table 3.11 Update Formulas for Class C Transformers ...........................................41
Table 4.1 Network Reduction Method....................................................................43Table 4.2 Network Elements...................................................................................44Table 4.3 Notation for (4.5) and (4.6).....................................................................47Table 4.4 Formulas for Combining with Incoming Branch....................................48Table 4.5 Voltage Update Formulas .......................................................................50
Table 5.1 Backward/Forward Sweep Method.........................................................58Table 5.2 Detail on Backward/Forward Sweeps.....................................................59Table 5.3 Implementation of (5.1) ..........................................................................60Table 5.4 Implementation of (5.5) ..........................................................................63Table 5.5 Notation for V-I-PARS Convergence Proof............................................78
Table 6.1 Newton’s Method....................................................................................86Table 6.2 Fast Decoupled Power Flow Algorithm for Radial Systems..................87Table 6.3 VI-DePARS Jacobian Formation.............................................................97Table 6.4 Jacobian Approximations for Transformers for VI-DePARS................106Table 6.5 Various Formulations for DePARS .......................................................110Table 6.6 I-DePARS Jacobian Formation .............................................................118Table 6.7 Jacobian Approximations for Transformers for I-DePARS ..................121
Table 7.1 Power Flow Algorithms for Weakly Meshed Systems........................129

xi
Table 8.1 Summary of Distribution Power Flow Algorithms...............................151Table 8.2 Summary of Test Systems ....................................................................154
Table 9.1 Summary of Radial Power Flow Algorithms........................................176
xii
LIST OF FIGURES
Figure 2.1 Example of Bus & Lateral Indexing.......................................................10Figure 2.2 Basic Building Block..............................................................................16
Figure 3.1 Grounded Wye Connected Load.............................................................24Figure 3.2 Ungrounded Delta Connected Load........................................................26Figure 3.3 Three-Phase Distribution Line Model ....................................................31
Figure 4.1 Norton Equivalent at Bus k.....................................................................46Figure 4.2 Combine with Incoming Branch.............................................................47Figure 4.3 Admittance Equivalent at Bus k .............................................................54
Figure 5.1 Single Feeder Example ...........................................................................59
Figure 6.1 Single Feeder Example ...........................................................................88Figure 6.2 Voltage Mismatch Calculation ...............................................................90Figure 6.3 Structure of System Jacobian for VI-DePARS ........................................99Figure 6.4 Approximation to the System Jacobian for VI-DePARS.......................108Figure 6.5 Current Mismatch Calculation..............................................................114Figure 6.6 Structure of System Jacobian for I-DePARS ........................................119
Figure 7.1 Loop Breakpoint ...................................................................................129Figure 7.2 Effect of Breakpoint Creation Method on Convergence ......................131Figure 7.3 Secondary Source Breakpoint...............................................................136Figure 7.4 Effect of Power vs. Current Injection on Convergence........................144
Figure 8.1 Iterations Required by Each Algorithm................................................156Figure 8.2 Linear vs. Quadratic Convergence........................................................157Figure 8.3 Total Flops for Each Algorithm............................................................158Figure 8.4 Normalized Flops vs. Algorithm...........................................................159Figure 8.5 Effect of Load Model on Number of Iterations ....................................161Figure 8.6 Effect of Load Model on Number of Flops ..........................................161Figure 8.7 Effect of Load Factor on Number of Iterations ....................................162Figure 8.8 Effect of Load Factor on Number of Flops...........................................163Figure 8.9 Effect of System Size on Number of Iterations ....................................164Figure 8.10 Effect of System Size on Number of Flops ..........................................165Figure 8.11 Total PARS Iterations for Adaptive vs. Single Iterations .....................167Figure 8.12 Total Number of Flops for Adaptive vs. Single Iterations....................167Figure 8.13 Number of Iterations vs. Number of Loops..........................................169Figure 8.14 Number of Flops vs. Number of Loops ................................................169Figure 8.15 Overall Comparison of Iteration Counts...............................................170Figure 8.16 Overall Comparison of Flop Counts.....................................................171
xiii
Figure 8.17 Convergence of V-I-PAWMS for Various Load Models.......................172Figure 8.18 Effect of Load Model on Number of PARS Iterations..........................173Figure 8.19 Effect of Load Model on Number of Flops ..........................................173
1
Chapter 1
Introduction
The supply of electric power to homes, offices, schools, factories,
stores, and nearly every other place in the modern world is now taken for
granted. Electric power has become a fundamental part of the infrastruc-
ture of contemporary society, with most of today’s daily activity based on
the assumption that the desired electric power is readily available. The
power systems which provide this electricity are some of the largest and
most complex systems in the world. They consist of three primary compo-
nents: the generation system, the transmission system, and the distribu-
tion system. Each component is essential to the process of delivering power
from the site where it is produced to the customer who uses it.
1.1 Background
One of the most fundamental calculations related to any system is the
determination of the steady state behavior. In power systems, this calcula-
tion is the steady state power flow problem, also called load flow. It essen-
2
tially involves finding the steady state voltages at each node, given a
certain set of generation and loading conditions.
The majority of power flow algorithms in wide use in industry today,
most notably, the Newton-Raphson method and its variants [25; 28], have
been developed specifically for transmission systems which have a meshed
structure, with parallel lines and many redundant paths from the genera-
tion points to the load points. The Newton-Raphson method itself is com-
putationally expensive for large systems, due primarily to the size of the
Jacobian and the resulting system of linear equations which must be
solved to find the Newton step. For transmission systems, some approxi-
mations can typically be made which allow for the decoupling of real and
reactive power from and voltage magnitude and angle, respectively. The
Jacobian can also be approximated by a constant matrix, resulting in the
fast-decoupled Newton method [26] which has proven to be a great
improvement over the standard Newton-Raphson power flow for many
cases.
The focus of this dissertation is on the solution of the power flow prob-
lem for the distribution system. Typically, a distribution system originates
at a substation where the electric power is converted from the high voltage
transmission system to a lower voltage for delivery to the customers.
Unlike a transmission system, a distribution system typically has a radial
topological structure. Unfortunately, this radial structure, along with the
higher resistance/reactance (R/X) ratio of the lines, makes the fast-decou-
pled Newton method unsuitable for most distribution power flow problems.
Since power flow is such a fundamental calculation for a power sys-
tem, it is used in many applications in planning and operation. Some of the
3
optimization problems related to distribution automation, such as network
reconfiguration, service restoration, and capacitor placement, require the
solution of hundreds or even thousands of power flow problems. These
applications place two primary requirements on a distribution power flow
program. First, the modeling must reflect the actual behavior of the system
components. Second, the solution algorithm must be robust and efficient.
Various efficient distribution power flow algorithms which exploit the
radial structure have been proposed in the literature. These algorithms
can be classified into three groups:
• network reduction methods [4]
• backward/forward sweep methods [3; 11; 18; 19; 20; 23]
• fast decoupled methods [12; 17; 32]
All of the proposed methods, as presented, have some limitations. Many
are only applied to single-phase representations of the network and cannot
handle unbalanced distribution systems or networks with a mixed number
of phases. Most of the methods are also proposed in the context of limited
network modeling. In particular, none of the algorithms in the literature
include modeling for transformers which are grounded on one side and
ungrounded on the other. Unlike the extension from a single-phase to a
three-phase representation, the addition of such modeling into the formu-
lation is not straightforward. Line charging capacitance, cogeneration, and
general load models are also typically not considered.
1.2 Objectives and Contributions
The objective of this work was to develop a formulation and an effi-
cient solution algorithm for the distribution power flow problem which
4
takes into account the detailed and extensive modeling necessary for use in
the distribution automation environment of a real world power system.
A general framework was developed for each of the three classes of
existing algorithms, and a common set of network component models was
chosen. The general framework for each class helps in relating the pro-
posed algorithms to one another and also reveals variations of each class
that have not previously been explored. Within each class, new algorithms
were developed and, where necessary, the existing algorithms were
extended to remove limitations and generalized to handle the following:
• general radial structure1
• unbalanced three-phase operation, including single-phase and two-phase branches
• general load models, including constant power, constant current, and constant impedance loads, connected in wye or delta configu-rations
• cogenerators
• shunt capacitors
• line charging effects
• switches
• three-phase transformers of various connection types
The basic problem framework and some common notation used
throughout the dissertation are introduced in Chapter 2. In Chapter 3,
detailed models for loads, shunt capacitors, cogenerators, distribution
lines, switches, and transformers are presented, along with some of the
specific equations needed to implement these models in the algorithms
which follow.
1 Some existing methods only handle a main feeder with laterals.
5
Chapters 4, 5, and 6, respectively, discuss in detail the network reduc-
tion, backward/forward sweep, and fast decoupled algorithms. Each chap-
ter presents first the basic concepts behind the corresponding class of
methods, then a detailed description of a specific algorithm in the respec-
tive class. Following this detailed description of the algorithm are some
comments on the implementation of the method. Each of the three classes
includes several variations which are discussed relative to the version pre-
sented in detail. Each of these chapters concludes with a discussion of the
convergence characteristics followed by some general comments. Chapter 5
and Chapter 6 include proofs of convergence for the respective algorithms.
Chapter 7 explores an extension of the radial power flow algorithms
discussed in the previous three chapters to handle weakly meshed systems
with certain modeling restrictions. The extension described is based on a
radial power flow solver imbedded within a compensation method. It
extends the formulation to address systems with loops, secondary sources,
and PV buses. The structure of the chapter is similar to the pattern of the
previous three, discussing the basic concepts, followed by a detailed
description of the algorithm, implementation notes, variations, and com-
ments.
Each of the radial power flow algorithms, including all of the varia-
tions presented, along with the extensions to weakly meshed networks,
was implemented in a MATLAB® program for testing. In addition, the New-
ton-Raphson and Implicit Zbus Gauss methods were implemented for com-
parison. Chapter 8 analyzes the relative performance of the various
methods on test systems ranging in size from 63 buses to over 1000 buses.
The effects of system size, load models, load factor, and number of loops in

6
the network are examined. The chapter ends with a summary of the simu-
lation results and some general conclusions about the relative merits of the
different approaches.
The final chapter discusses the conclusions drawn from this work,
outlines a summary of the contributions made, and mentions some ideas
for possible areas of future research to extend the work in this dissertation.

7
Chapter 2
Basic Problem Framework
The distribution power flow problem is the problem of finding the
operating point of a distribution network at steady state under given con-
ditions of load and cogeneration. This involves, first of all, finding all of the
bus voltages. From these voltages, it is possible to directly compute cur-
rents, power flows, system losses and other steady state quantities. This
chapter presents some of the fundamental concepts which are general in
nature and apply to all or at least several of the approaches discussed in
later chapters.
2.1 Mathematical Notation
Since this dissertation deals with three-phase unbalanced power flow,
vectors are typically used to represent voltages, currents, power flows, and
admittances. Many of the formulas presented in this work can be
expressed more clearly and compactly by using certain notational conven-
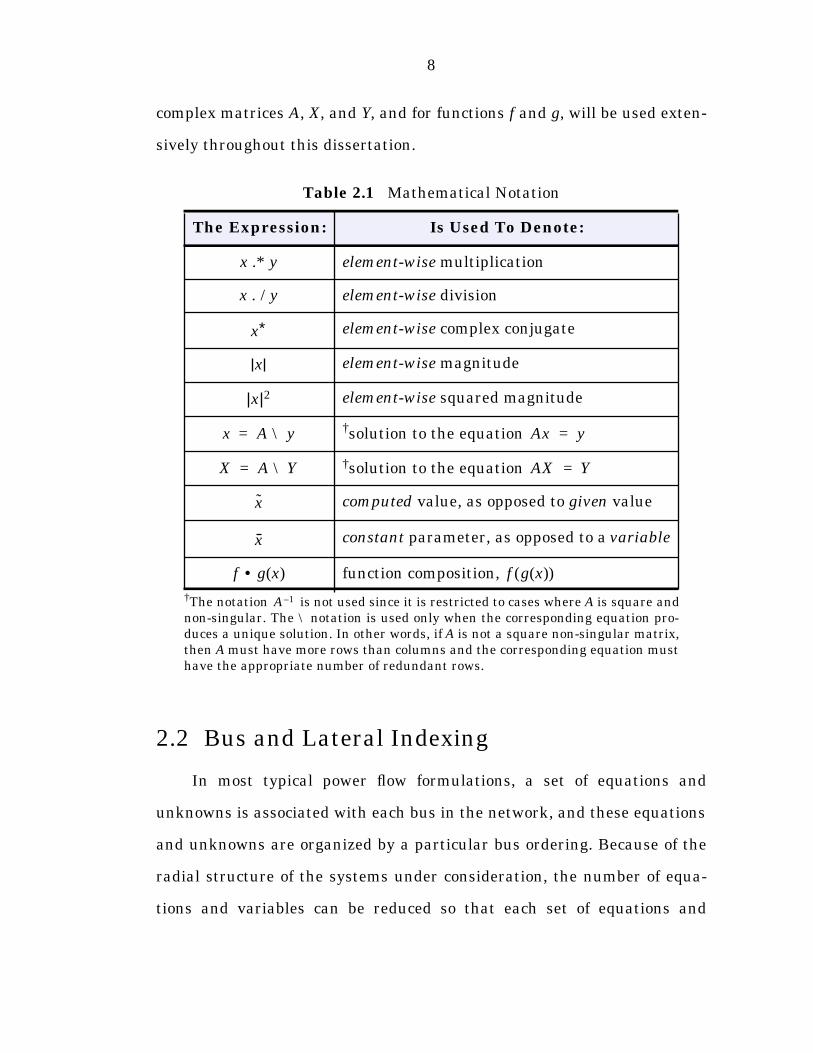
tions. The conventions shown in Table 2.1 for complex vectors x and y, for
8
complex matrices A, X, and Y, and for functions f and g, will be used exten-
sively throughout this dissertation.
2.2 Bus and Lateral Indexing
In most typical power flow formulations, a set of equations and
unknowns is associated with each bus in the network, and these equations
and unknowns are organized by a particular bus ordering. Because of the
radial structure of the systems under consideration, the number of equa-
tions and variables can be reduced so that each set of equations and
†The notation is not used since it is restricted to cases where A is square andnon-singular. The \ notation is used only when the corresponding equation pro-duces a unique solution. In other words, if A is not a square non-singular matrix,then A must have more rows than columns and the corresponding equation musthave the appropriate number of redundant rows.
Table 2.1 Mathematical Notation
The Expression: Is Used To Denote:
element-wise multiplication
element-wise division
element-wise complex conjugate
element-wise magnitude
element-wise squared magnitude
†solution to the equation
†solution to the equation
computed value, as opposed to given value
constant parameter, as opposed to a variable
function composition,
x y.*
x y. /
x∗
x
x 2
x A y\= Ax y=
A 1–
X A Y\= AX Y=
x
x
f g• x( ) f g x( )( )
9
unknowns corresponds to an entire lateral instead of an individual bus.
Such a formulation therefore calls for an appropriate lateral indexing to
order these equations and variables.
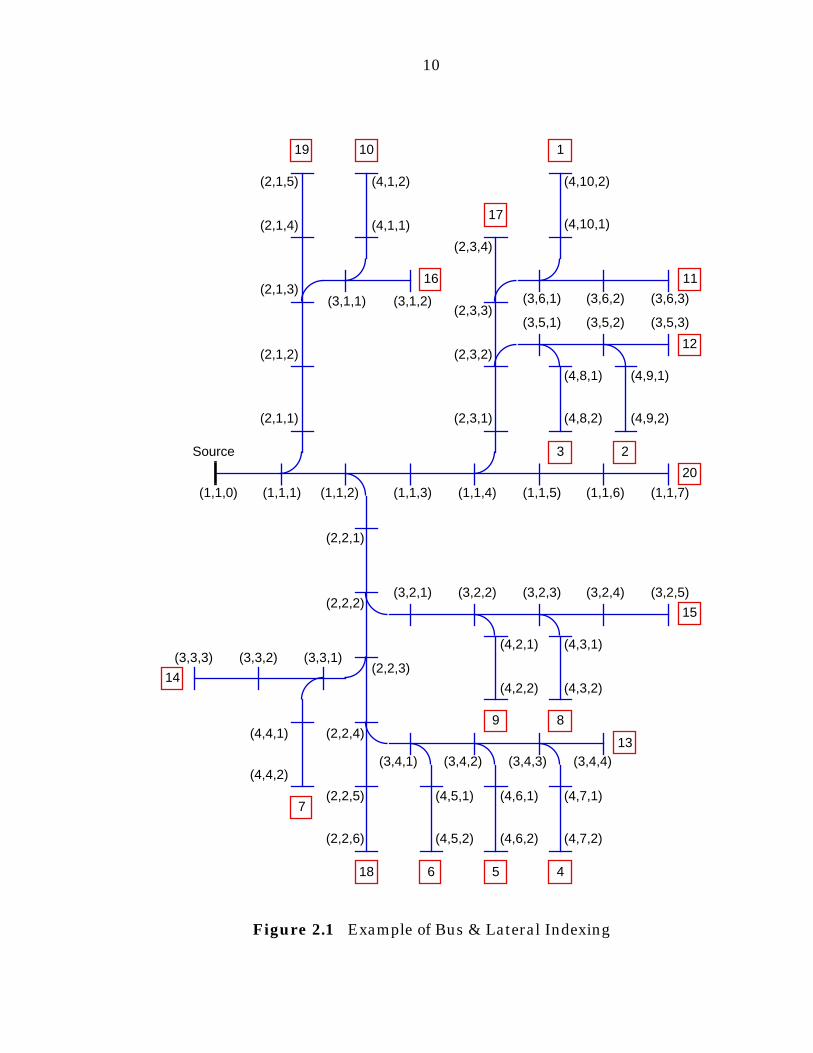
2.2.1 Indexing Scheme
A radial system can be thought of as a main feeder with laterals.
These laterals may also have sub-laterals, which themselves may have
sub-laterals, etc. First, the level of lateral i is defined as the number of lat-
erals which need to be traversed to go from the end of lateral i to the
source. For example, the main feeder would be level 1, its sub-laterals
would be level 2, their sub-laterals level 3, etc.
Second, the laterals within level l are indexed according to the order
seen during a breadth-first traversal of the network. Each lateral can be
uniquely identified by an ordered pair where l is the lateral level and
m is the lateral index within level l.
Third, buses are indexed within each lateral, starting with the first
bus on the lateral, so that each bus is uniquely identified by an ordered tri-
ple where n is the bus index. The ordered triple refers to
the nth bus on the mth level l lateral. The source is given an index of
. The number of levels in a network will be denoted by L, the num-
ber of laterals on level l by , and the number of buses on lateral
by .
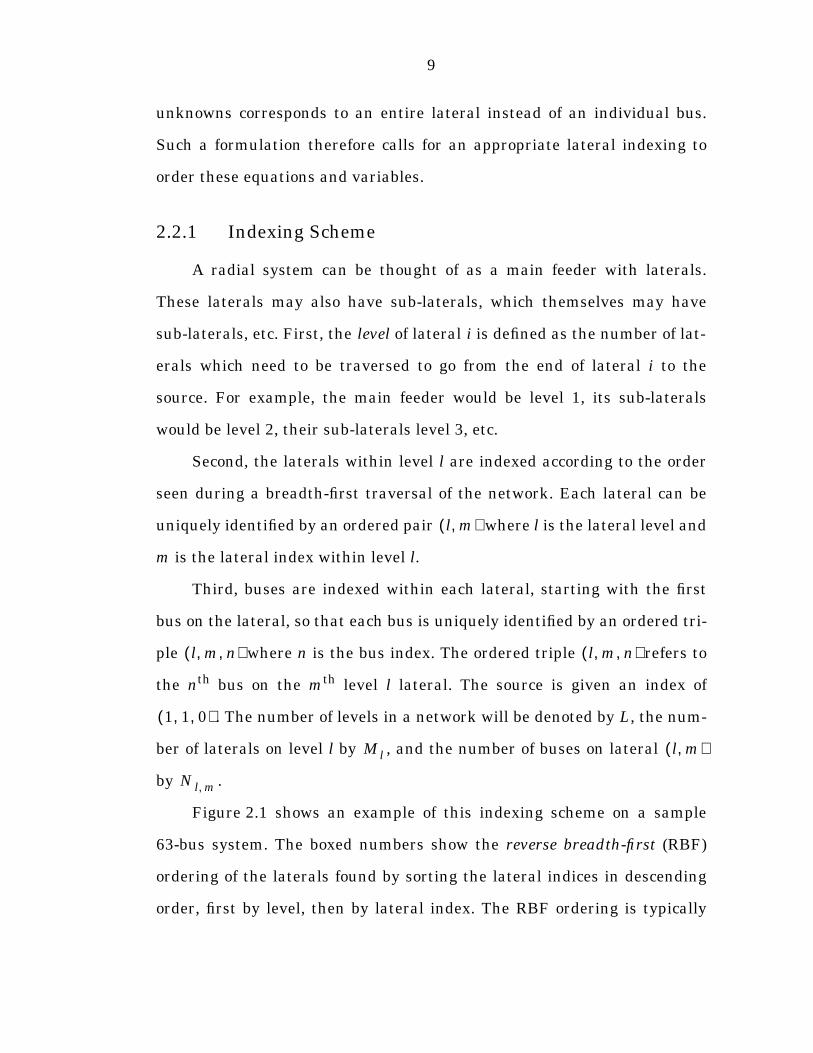
Figure 2.1 shows an example of this indexing scheme on a sample
63-bus system. The boxed numbers show the reverse breadth-first (RBF)
ordering of the laterals found by sorting the lateral indices in descending
order, first by level, then by lateral index. The RBF ordering is typically
l m,( )
l m n, ,( ) l m n, ,( )
1 1 0, ,( )
Ml l m,( )
N l m,
10
Figure 2.1 Example of Bus & Lateral Indexing
(1,1,0) (1,1,1) (1,1,2) (1,1,3) (1,1,4) (1,1,5) (1,1,6) (1,1,7)
(2,3,1)
(2,3,2)
(3,6,1)
(2,3,4)
(2,3,3)(3,6,2) (3,6,3)
(3,5,3)(3,5,2)(3,5,1)
(4,9,1)
(4,9,2)(2,1,1)
(2,1,2)
(2,1,3)
(2,1,4)
(2,1,5)
(3,1,1) (3,1,2)
Source
(4,1,2)
(4,1,1)
(2,2,4)
(2,2,3)
(2,2,1)
(2,2,2)
(2,2,5)
(2,2,6)
(4,4,2)
(4,4,1)
(3,3,3) (3,3,2) (3,3,1)
(3,2,1) (3,2,2) (3,2,3) (3,2,4) (3,2,5)
(4,3,1)
(4,3,2)(4,2,2)
(4,2,1)
(4,7,1)
(4,7,2)
(4,6,1)
(4,6,2)(4,5,2)
(4,5,1)
(3,4,1) (3,4,2) (3,4,3) (3,4,4)
(4,8,2)
(4,8,1)
(4,10,1)
(4,10,2)
1
3 2
456
8
7
9
10
11
13
12
15
16
18
17
19
20
14
11
used for backward sweep type operations. If the laterals are sorted in
ascending order, the result is a breadth-first (BF) ordering, typically used
for forward sweep type operations.
The following shorthand notation will also be used when i is an
ordered pair referring to a lateral and k is an ordered triple referring to a
bus. Lateral refers to the parent of lateral i, and bus refers to
bus k’s parent bus. Unless specified otherwise, bus is used to refer to
the bus following bus k on the same lateral. This is consistent with using k
as a simple bus index, in other words letting , which is done fre-
quently throughout the following chapters. In this case, bus 0 of lateral i
refers to the bus on lateral from which lateral i emanates. For exam-
ple, in the network in Figure 2.1, bus 0 of lateral (2,3) is also bus 4 of lat-
eral (1,1). This notation is used in indexing voltages, currents, power flows,
impedances, etc.
2.2.2 Indexing Implementation
All of the algorithms discussed in Chapters 4, 5, 6, and 7 use the
ordering of the buses and laterals presented in the previous section. They
also require the ability to traverse any given lateral from its source to its
end bus or vice versa. Certain data structures are therefore needed in the
program to store information about connectivity and ordering. Also
required is a process by which this information is generated from the origi-
nal network data.
2.2.2.1 Connectivity Data Structures
The network data which specifies the topology of the system is typi-
cally given as a list of branches with information on which two buses the
i 1– k 1–
k 1+
k n=
i 1–
12
branch connects. In order to efficiently traverse a feeder, it is important to
store information with each bus k indicating the incoming branch, the bus
which follows bus k on the same lateral, the number of sub-laterals
branching off at bus k, and the first bus on each of these sub-laterals.
The first three of these quantities will be denoted inbranch(k),
next(k), and nsubs(k), respectively. The first bus on the sub-laterals
branching from bus k will be called subbus1(k,1), subbus1(k,2), …,
subbus1(k,nsubs(k)), respectively. Assuming the source bus is known,
these data structures can be built up, along with the ordered triples of the
previous section, during the process of a breadth-first search.
2.2.2.2 Breadth-First Search
The initial traversal of the network is done via a breadth-first search
algorithm. This traversal can be useful for many things such as detecting
isolated sub-networks, checking the consistency of the phase data,1 and
marking sections of the network as grounded or ungrounded. However, the
primary purpose is to build up the connectivity data structures and assign
the bus and lateral indices. It should be noted that a depth-first search
works equally well for building the connectivity data structures and index-
ing the buses. The breadth-first approach was chosen for convenience in
dealing with weakly meshed networks as discussed in Chapter 7.
The breadth-first search, as described in [22], requires the ability to
find all of the “children” associated with a given node of the tree. Since the
connectivity structures are not yet available, the children of bus k must be
found via brute force by searching all branches for those connected to
1 How many and which phases are present at each bus and branch and do they match.
13
bus k. If the bus at the other end of such a branch has not yet been visited
during the search,2 it is a child of bus k.
When the search is at bus k and all of bus k’s children have been
found, the inbranch information can be set for each child. The value of
nsubs is typically set to one less than the number of children since one of
the children is generally selected to be the next bus on the same lateral
and the rest are assigned to the elements of subbus1.
The decision of which child, if any, is considered to be on the continua-
tion of the same lateral and which children are considered to be on sub-lat-
erals has a significant effect on the resulting bus and lateral indexing.
Since some of the power flow algorithms require that each lateral have at
most one transformer, a child whose inbranch is a transformer is never
assigned to next. Transformers are always assigned to a sub-lateral, even
if it leads to the bus’s only child. Similarly, if the branch leading to a child
of bus k has fewer phases than bus k, then the child is put on a sub-lateral.
This simplifies some of the implementation since it means that the phases
present are consistent throughout an entire lateral.
After setting the connectivity data structures at bus k, the bus’s
ordered triple is generated. This requires several counters to be main-
tained during the search process. First, l, m, and n are used to denote the
current level, lateral, and bus indices, respectively. The counters L, ,
and keep track of the number of levels encountered during the
search, the number of laterals on level l, and the number of buses on
lateral , respectively. The algorithm used to generate the ordered tri-
ple for bus k is shown in Table 2.2.
2 i.e. the branch is not the incoming branch of bus k (assuming a radial network).
Ml
N l m,
l m,( )

14
The index for the source is set directly to . Each of the remain-
ing buses falls into one of two classes based on whether it is the first bus on
a lateral or a continuation of a lateral previously encountered during the
search. For a bus k in the second class, the level and lateral indices, l and
m, are copied directly from the bus’s parent. For the first class, the level
index l is set to one more than that of the bus’s parent, and the lateral
counter for that level is incremented by one and assigned to the lateral
Table 2.2 Bus Indexing Implementation
Algorithm for Setting Indices (l, m, n) for Bus k
if bus k is the source
set
otherwise (for all other buses)
set l to the level of k’s parent bus
if bus k lies on the same lateral as its parent bus
set m to lateral index of k’s parent bus
otherwise (it is the first bus on a new lateral)
increment l by 1
if this is the first level l lateral encountered
increment L by one (i.e. set )
initialize
end if
increment by 1 and set
initialize
end if
increment by 1 and set
end if
set the index for bus k to
l m n, ,( ) L M1 N1 1,, ,( ) 1 1 0, ,( )= =
L l=
Ml 0=
Ml m Ml=
N l m, 0=
N l m, n N l m,=
l m n, ,( )
1 1 0, ,( )
15
index m. Finally, in both cases, the bus counter for that lateral is incre-
mented by one and assigned as the bus index n. Each time a new level l is
first encountered, L is incremented and assigned to l and the correspond-
ing lateral counter is initialized to zero. Likewise, each time a new
level l lateral is first encountered, is incremented and assigned to m
and the corresponding bus counter is initialized to zero.
When the entire network has been traversed by the search, all connec-
tivity structures have been built and all bus indices have been assigned.
These bus indices are then used to form a list of laterals in RBF3 order.
Each element of the list contains the first and last buses on the correspond-
ing lateral. These elements are sorted in descending order according to the
indices associated with the corresponding buses, first by the lateral level,
then by the lateral index.
2.3 Basic System Model
For the purposes of power flow studies, a radial distribution system
can be modeled as a network of buses connected by distribution lines,
switches, or transformers to a voltage specified source bus. Each bus may
also have a corresponding load, shunt capacitor, and/or cogenerator con-
nected to it. The model can be represented by a radial interconnection of
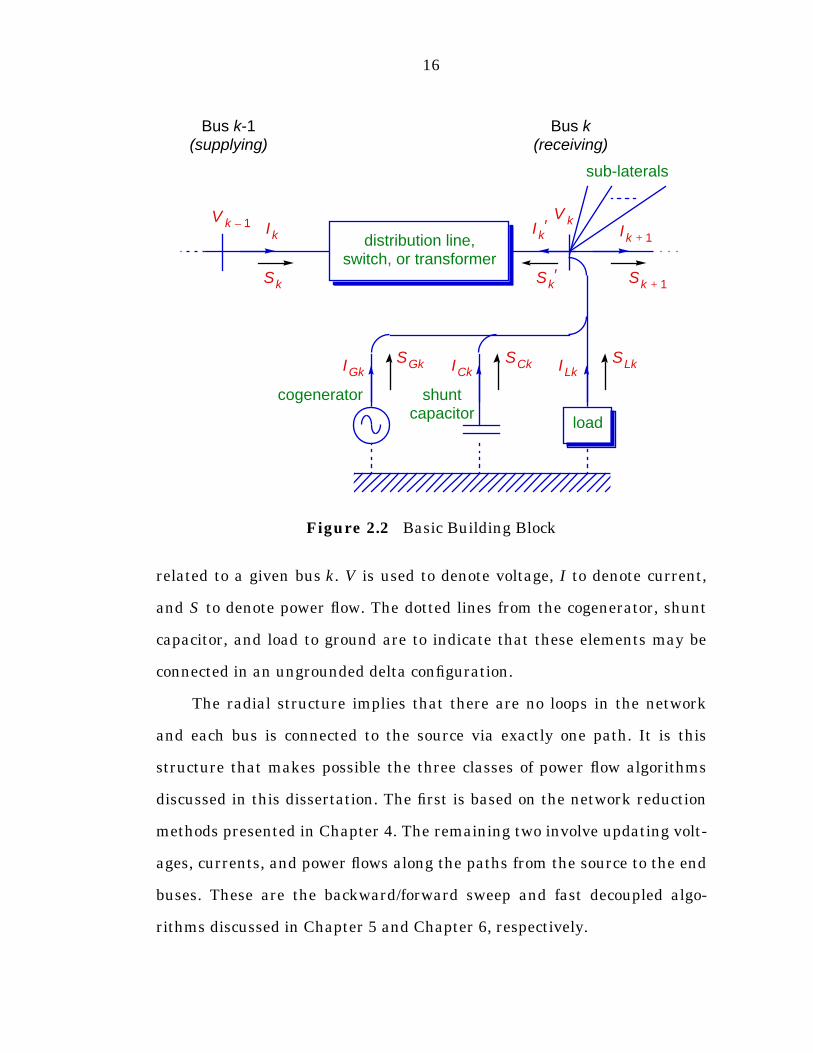
copies of the basic building block shown in Figure 2.2. Since a given branch
may be single-phase, two-phase, or three-phase, each of the labeled quanti-
ties is, respectively, a complex scalar, a 2 x 1, or a 3 x 1 complex vector.
Figure 2.2 establishes a consistent notation, which will be used extensively
throughout this dissertation, for the voltages, currents, and power flows
3 See page 9 under Section 2.2.1, “Indexing Scheme”.
Ml
Ml
N l m,
16
related to a given bus k. V is used to denote voltage, I to denote current,
and S to denote power flow. The dotted lines from the cogenerator, shunt
capacitor, and load to ground are to indicate that these elements may be
connected in an ungrounded delta configuration.
The radial structure implies that there are no loops in the network
and each bus is connected to the source via exactly one path. It is this
structure that makes possible the three classes of power flow algorithms
discussed in this dissertation. The first is based on the network reduction
methods presented in Chapter 4. The remaining two involve updating volt-
ages, currents, and power flows along the paths from the source to the end
buses. These are the backward/forward sweep and fast decoupled algo-
rithms discussed in Chapter 5 and Chapter 6, respectively.
Figure 2.2 Basic Building Block
Bus k-1 Bus k
distribution line,
sub-laterals
V k 1– Ik
V kIk 1+
SLk
cogenerator shuntcapacitor
load
SCkSGk
(supplying) (receiving)
Ik′
switch, or transformerSk Sk
′ Sk 1+
ILkICkIGk

17
Each of the algorithms in these three classes depends on the ability to
compute the voltage and current (or power flow) at a given bus from the
corresponding quantities at an adjacent bus. Letting
and , (2.1)
these update formulas can be expressed mathematically by the equations
in Table 2.3 for each of four different cases.
The functions and are inverses of each other and the functions
and are inverses of each other. Each of the four functions is deter-
mined by the respective load, shunt capacitor, cogenerator, and sub-later-
als attached at bus k as well as the incoming distribution line, switch, or
transformer.
The implementation of each of the update formulas in Table 2.3 con-
sists of a four step procedure. The steps for the implementation of (2.2) are
shown in Table 2.4. The backward calculation of (2.3) is accomplished by
the steps shown in Table 2.5. These steps are nearly the same as those in
Table 2.4, but in a different order. In the case of (2.4) and (2.5), where
Table 2.3 General Update Formulas
Based onDirection ofCalculation
Update Formula
currentforward (2.2)
backward (2.3)
power flowforward (2.4)
backward (2.5)
wk
Vk
Ik 1+
= uk
Vk
Sk 1+
=
wk f k wk 1–( )=
wk 1– gk wk( )=
uk ek uk 1–( )=
uk 1– hk uk( )=
f k gk
ek hk
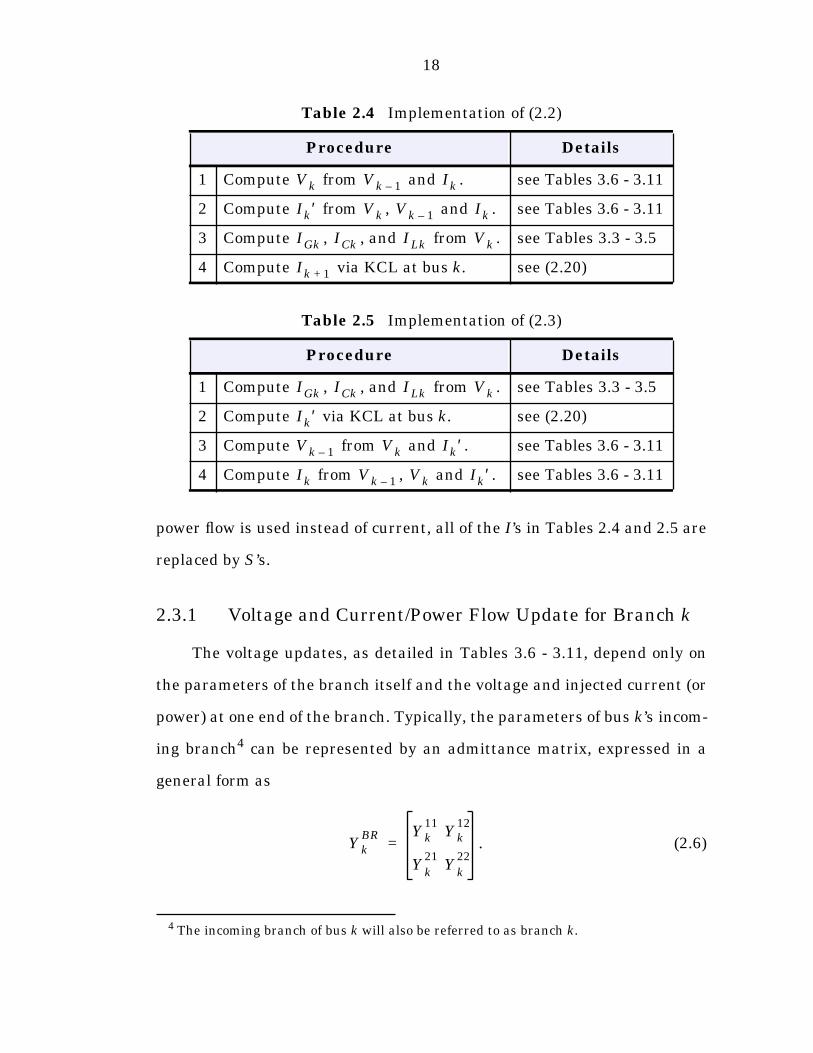
18
power flow is used instead of current, all of the I’s in Tables 2.4 and 2.5 are
replaced by S’s.
2.3.1 Voltage and Current/Power Flow Update for Branch k
The voltage updates, as detailed in Tables 3.6 - 3.11, depend only on
the parameters of the branch itself and the voltage and injected current (or
power) at one end of the branch. Typically, the parameters of bus k’s incom-
ing branch4 can be represented by an admittance matrix, expressed in a
general form as
. (2.6)
4 The incoming branch of bus k will also be referred to as branch k.
Table 2.4 Implementation of (2.2)
Procedure Details
1 Compute from and . see Tables 3.6 - 3.11
2 Compute from , and . see Tables 3.6 - 3.11
3 Compute , , and from . see Tables 3.3 - 3.5
4 Compute via KCL at bus k. see (2.20)
Table 2.5 Implementation of (2.3)
Procedure Details
1 Compute , , and from . see Tables 3.3 - 3.5
2 Compute via KCL at bus k. see (2.20)
3 Compute from and . see Tables 3.6 - 3.11
4 Compute from , and . see Tables 3.6 - 3.11
Vk Vk 1– Ik
Ik′ Vk Vk 1– Ik
IGk ICk ILk Vk
Ik 1+
IGk ICk ILk Vk
Ik′
Vk 1– Vk Ik′
Ik Vk 1– Vk Ik′
YkBR Yk
11Yk
12
Yk21
Yk22
=

19
The voltages and currents at either end of branch k are related by as
follows:
(2.7)
From (2.7), can be calculated in the forward direction as a function
of and or can be calculated in the backward direction as a
function of and . If power flow is being used instead of current, the
following are substituted for and , respectively:
(2.8)
(2.9)
Once the voltage, or depending on the direction of calcula-
tion, has been updated, the updated current can also be computed directly
from (2.7). If the power flow is needed it can be computed from the updated
current and voltage by one of the following:
(2.10)
(2.11)
The resulting general branch update formulas are summarized in
Table 2.6.
2.3.2 Application of KCL
The current or power flow component of the update formulas (2.2)-
(2.5) is based on the current or power lost in bus k’s incoming branch and
the application of Kirchhoff’s Current Law (KCL) at bus k. The application
of KCL at bus k requires the currents injected by cogenerators, shunt
YkBR
Ik
Ik′
Yk11
Yk12
Yk21
Yk22
Vk 1–
Vk
=
Vk
Vk 1– Ik Vk 1–
Vk Ik′
Ik Ik′
Ik Sk Vk 1–. /( ) ∗=
Ik′ Sk′ Vk. /( ) ∗=
Vk
Vk 1–
Sk Vk 1– Ik∗.*=
Sk′ Vk Ik′∗.*=

20
capacitors, and loads, represented by , , and , respectively. Each
of these quantities is a function of and is hence designated with a tilde.
It also requires the currents injected into sub-laterals branching off
from bus k. Here and is the set of buses adjacent to bus k on
sub-laterals.
KCL at bus k can then be written as
. (2.20)
In the case where power flow is used there is an analogous equation
expressing the conservation of complex power at bus k.
(2.21)
Table 2.6 General Branch Update Formulas
Based on
Direction ofCalculation
Functionof
Update Formula
current
forward(2.12)
(2.13)
backward(2.14)
(2.15)
power flow
forward(2.16)
(2.17)
backward(2.18)
(2.19)
Vk 1– Ik,Vk Yk
12( ) 1–Ik Yk
11Vk 1––( )=
Ik′ Yk21
Vk 1– Yk22
Vk+=
Vk Ik′,Vk 1– Yk
21( ) 1–Ik′ Yk
22Vk–( )=
Ik Yk11
Vk 1– Yk12
Vk+=
Vk 1– Sk,Vk Yk
12( ) 1–Sk Vk 1–. /( ) ∗ Yk
11Vk 1––( )=
Sk′ Vk Yk21
Vk 1– Yk22
Vk+( ) ∗.*=
Vk Sk′,Vk 1– Yk
21( ) 1–Sk′ Vk. /( ) ∗ Yk
22Vk–( )=
Sk Vk 1– Yk11
Vk 1– Yk12
Vk+( ) ∗.*=
IGk ICk ILk
Vk
Ij
j Ak
∈ Ak
IGk ICk ILk I jj Ak∈∑
– Ik′– Ik 1+–+ + 0=
SGk SCk SLk S jj Ak∈∑
– Sk′– Sk 1+–+ + 0=
21
Chapter 3
Detailed Component Models
In any problem where mathematics and numerical algorithms are
used to analyze a physical system, the results are only as accurate as the
mathematical models used. In power systems analysis, the solutions found
by any power flow algorithm are only useful to the user if they provide
results which are meaningful with respect to some real system. It is there-
fore important to model each component of the system as accurately as
possible. On the other hand, care must be taken to avoid using models
which are overly detailed and therefore either computationally impractical
or unusable due to unavailability of parameter data. The algorithms pre-
sented in this dissertation are based on models which attempt to meet
these two requirements. Most are based on standard three-phase models
as presented in [2; 8; 10].
This chapter describes in detail the models used for loads, shunt
capacitors, cogenerators, distribution lines, switches, and transformers.
These models provide relationships between the relevant voltages, cur-
rents, and power flows. By convention, injected currents and power flows

22
are always used for loads, shunt capacitors, and cogenerators, as shown in
Figure 2.2.
Bus voltages are typically the phase voltages , , and refer-
enced to ground. However, it is possible to have floating sections of the net-
work in which there is no reference to ground. For example, there might be
a feeder connected to the secondary side of a grounded wye to delta trans-
former which has only ungrounded, i.e. delta connected, loads. The terms
grounded and ungrounded, respectively, will be used to distinguish
between parts of the network which have a reference to ground and those
floating sections which do not. Which buses are in grounded sections and
which are in ungrounded sections is determined according to the ground-
ing of the transformer connections during the initial traversal of the net-
work described in Section 2.2.2.2, “Breadth-First Search”. It is assumed
that any part of a network supplied through an ungrounded transformer
connection will be entirely ungrounded.1
In the ungrounded sections, to avoid arbitrarily picking a particular
phase as the voltage reference, the line-to-line voltages and are
used. In this case, the third line voltage is redundant since it is always
equal to , and the dimension of the equations is reduced by
one. Similarly, the current in one of the phases is redundant since
, so typically only phase a and phase b currents are used
for calculation.
1 A sub-network, supplied through an ungrounded transformer connection, which doeshave some grounded elements could be handled by the network reduction methods ofChapter 4, though the details of such a case are not discussed. In their current forms,however, the methods of Chapter 5 and Chapter 6 are unable to handle this case.
Va
Vb
Vc
Vab
Vbc
Vca
Vab
Vbc
+( )–
Ic
Ia
Ib
+( )–=

23
When computing power flows as opposed to currents, ground is used
as a reference in grounded sections. For example, . However,
in ungrounded sections, the power used is that defined by the line-to-line
voltages and , and the currents and .
(3.1)
(3.2)
It is important to note that, although it is possible to calculate total power
flows in grounded sections of the network by the sum , the
total power flow in an ungrounded section is not equal to . Total
power flows must be calculated using a common voltage base. For example,
using phase c as a voltage reference, the total power can be computed as
. (3.3)
3.1 Load Model
The model used for loads is a flexible one. It includes constant com-
plex power, constant current, and constant impedance types.2 Three-phase
loads can be balanced or unbalanced and can be connected in a grounded
wye configuration or an ungrounded delta configuration. It is also possible
to have single-phase or two-phase grounded loads. Typically, the load val-
ues are given as nominal power delivered to the load and must be con-
verted into the appropriate constant model parameters. Depending on the
type of power flow algorithm being utilized, it may be necessary to compute
2 Each load could actually be a linear combination of these three types. In fact, it isstraightforward to generalize the model presented here to a current injection expressed asan arbitrary function of voltage.
Sa
VaI
a∗=
Vab
Vbc
Ia
Ib
Sab
Vab
Ia∗
=
Sbc
Vbc
Ib∗
=
Sa
Sb
Sc
+ +
Sab
Sbc
+
Stotal
Sac
Sbc
+=
24
the following quantities from the bus voltage and the constant model
parameters:
• admittance matrix
• injected current
• injected power
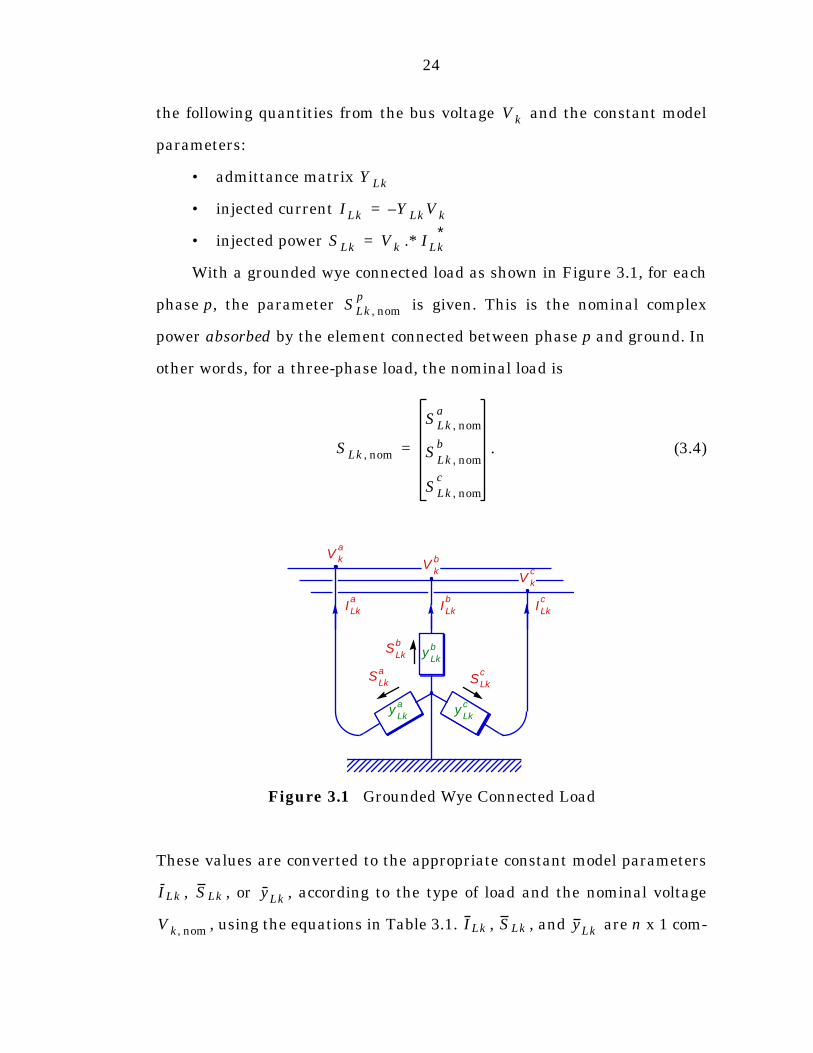
With a grounded wye connected load as shown in Figure 3.1, for each
phase p, the parameter is given. This is the nominal complex
power absorbed by the element connected between phase p and ground. In
other words, for a three-phase load, the nominal load is
. (3.4)
These values are converted to the appropriate constant model parameters
, , or , according to the type of load and the nominal voltage
, using the equations in Table 3.1. , , and are n x 1 com-
Figure 3.1 Grounded Wye Connected Load
Vk
Y Lk
ILk Y LkVk–=
SLk Vk ILk∗.*=
SLk nom,p
SLk nom,
SLk nom,a
SLk nom,b
SLk nom,c
=
yLk
b
yLk
a yLk
c
V k
c
ILk
a
SLk
b
SLk
cSLk
a
ILk
bILk
c
V k
a
Vk
b
ILk SLk yLk
Vk nom, ILk SLk yLk
25
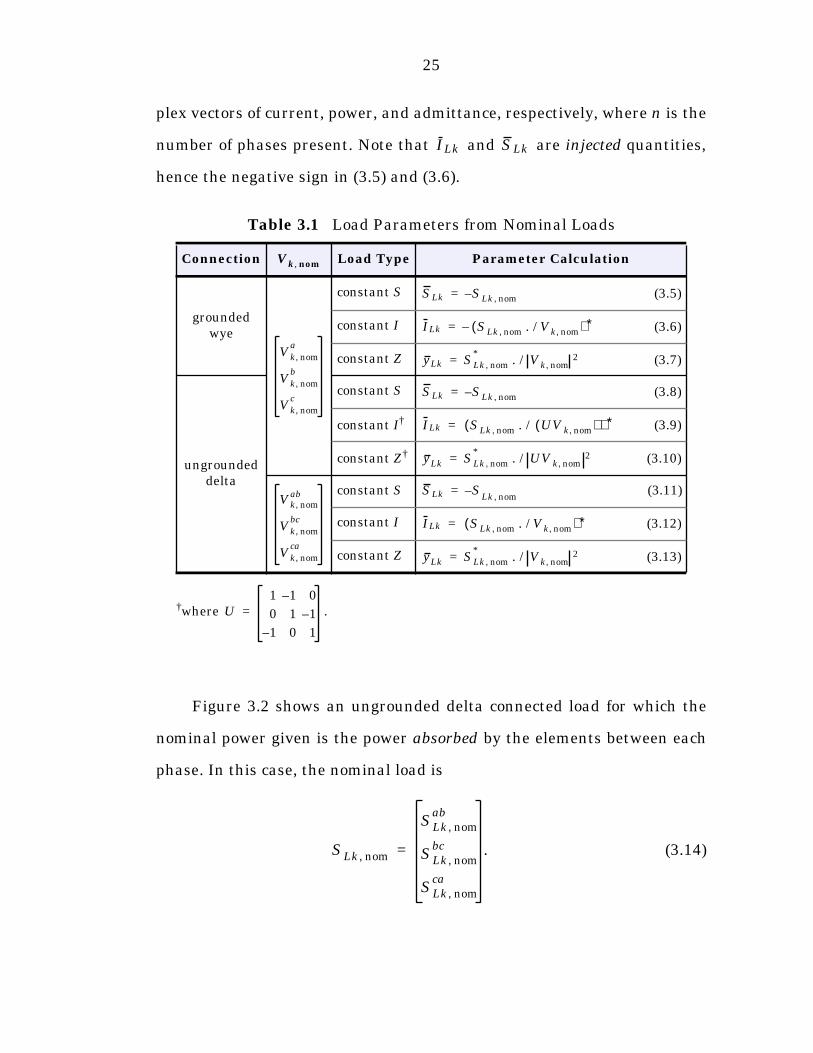
plex vectors of current, power, and admittance, respectively, where n is the
number of phases present. Note that and are injected quantities,
hence the negative sign in (3.5) and (3.6).
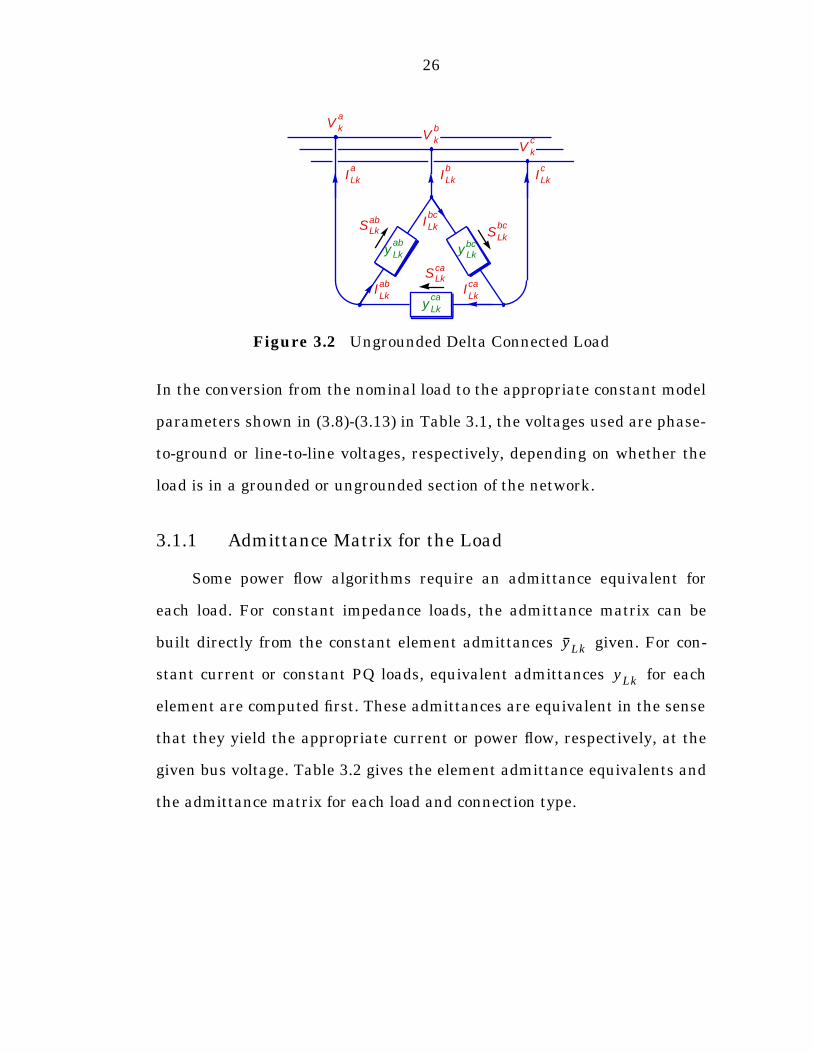
Figure 3.2 shows an ungrounded delta connected load for which the
nominal power given is the power absorbed by the elements between each
phase. In this case, the nominal load is
. (3.14)
†where .
Table 3.1 Load Parameters from Nominal Loads
Connection Load Type Parameter Calculation
grounded wye
constant S (3.5)
constant I (3.6)
constant Z (3.7)
ungrounded delta
constant S (3.8)
constant I† (3.9)
constant Z† (3.10)
constant S (3.11)
constant I (3.12)
constant Z (3.13)
ILk SLk
Vk nom,
Vk nom,a
Vk nom,b
Vk nom,c
SLk SLk nom,–=
ILk SLk nom, Vk nom,. /( ) ∗–=
yLk SLk nom,*
Vk nom,2. /=
SLk SLk nom,–=
U1 1– 0
0 1 1–
1– 0 1
=
ILk SLk nom, UV k nom,( ). /( ) ∗=
yLk SLk nom,*
UV k nom,2. /=
Vk nom,ab
Vk nom,bc
Vk nom,ca
SLk SLk nom,–=
ILk SLk nom, Vk nom,. /( ) ∗=
yLk SLk nom,*
Vk nom,2. /=
SLk nom,
SLk nom,ab
SLk nom,bc
SLk nom,ca
=
26
In the conversion from the nominal load to the appropriate constant model
parameters shown in (3.8)-(3.13) in Table 3.1, the voltages used are phase-
to-ground or line-to-line voltages, respectively, depending on whether the
load is in a grounded or ungrounded section of the network.
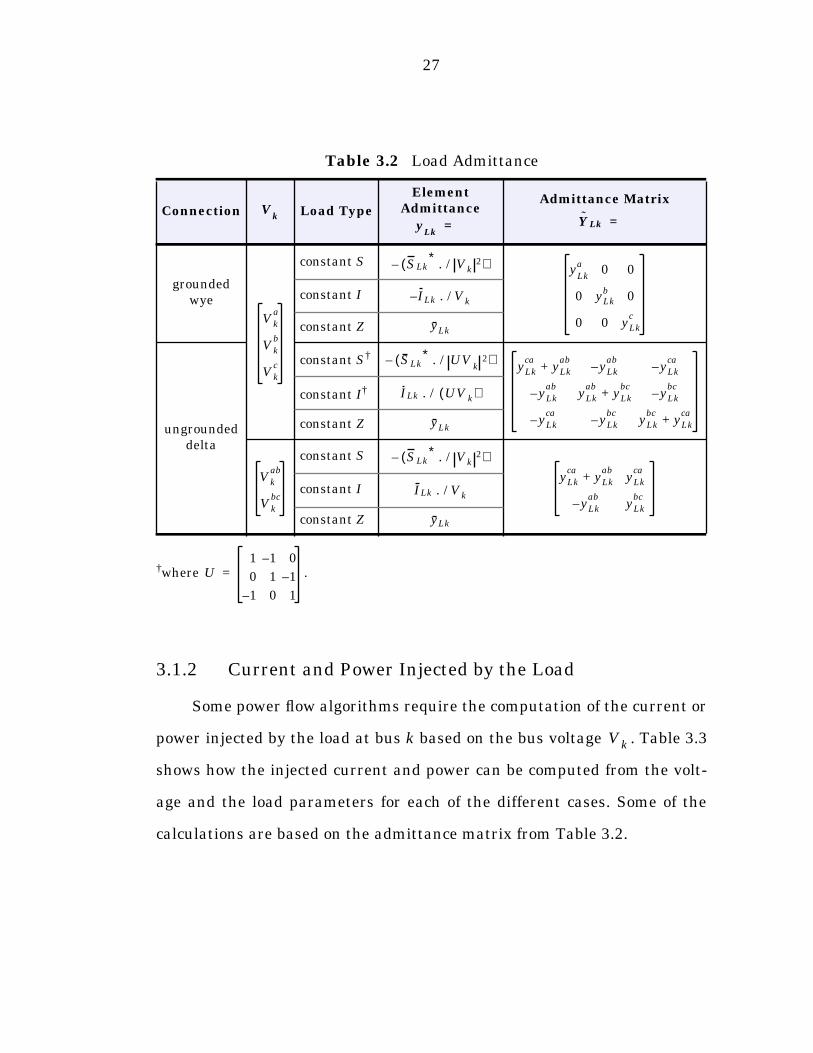
3.1.1 Admittance Matrix for the Load
Some power flow algorithms require an admittance equivalent for
each load. For constant impedance loads, the admittance matrix can be
built directly from the constant element admittances given. For con-
stant current or constant PQ loads, equivalent admittances for each
element are computed first. These admittances are equivalent in the sense
that they yield the appropriate current or power flow, respectively, at the
given bus voltage. Table 3.2 gives the element admittance equivalents and
the admittance matrix for each load and connection type.
Figure 3.2 Ungrounded Delta Connected Load
V k
c
ILk
aILk
bILk
c
V k
a
V k
b
y Lkbcy Lk
ab
y Lk
ca
SLk
bc
SLkca
SLkab
ILk
ab
ILk
bc
ILk
ca
yLk
yLk
27
3.1.2 Current and Power Injected by the Load
Some power flow algorithms require the computation of the current or
power injected by the load at bus k based on the bus voltage . Table 3.3
shows how the injected current and power can be computed from the volt-
age and the load parameters for each of the different cases. Some of the
calculations are based on the admittance matrix from Table 3.2.
†where .
Table 3.2 Load Admittance
Connection Load TypeElement
AdmittanceAdmittance Matrix
grounded wye
constant S
constant I
constant Z
ungrounded delta
constant S†
constant I†
constant Z
constant S
constant I
constant Z
Vk
yLk
= Y Lk =
Vka
Vkb
Vkc
SLk∗ Vk
2. /( )– yLka 0 0
0 yLkb 0
0 0 yLkc
ILk Vk. /–
yLk
U1 1– 0
0 1 1–
1– 0 1
=
SLk∗ UV
k2. /( )– yLk
cayLk
ab+ y– Lk
aby– Lk
ca
y– Lkab
yLkab
yLkbc
+ y– Lkbc
y– Lkca
y– Lkbc
yLkbc
yLkca
+
ILk UV k( ). /
yLk
Vkab
Vkbc
SLk∗ Vk
2. /( )–
yLkca
yLkab
+ yLkca
yLkab
– yLkbc
ILk Vk. /
yLk
Vk
28
3.2 Shunt Capacitor Model
Shunt capacitors, often used for reactive power compensation in a dis-
tribution network, are modeled as constant capacitance devices. As with
loads, they can be connected in a grounded wye configuration or an
ungrounded delta configuration as shown in Figure 3.1 and Figure 3.2,
respectively. In fact, they are treated in exactly the same way as a purely
reactive constant impedance load. It is assumed that shunt capacitors in
†where .
Table 3.3 Current & Power Injected by Load
Connection Load TypeInjected Current Injected Power
grounded wye
constant S
constant I
constant Z
ungrounded delta
constant S†
constant I†
constant Z
constant S
constant I
constant Z
Vk ILk = SLk =
Vka
Vkb
Vkc
SLk Vk. /( ) ∗ SLk
ILk
Vk ILk∗
.*yLk Vk.*–
UT
SLk UV k( ). /[ ]( ) ∗
Vk ILk∗
.*UT
ILk–
Y LkVk–
Vkab
Vkbc
SLkca
Vkab
Vkbc
+-------------------------–
SLkab
Vkab
---------–
SLkab
Vkab
---------SLk
bc
Vkbc
---------–
∗
Vk ILk∗
.*
ILkca
ILkab
–
ILkab
ILkbc
–
Y LkVk–
U1 1– 0
0 1 1–
1– 0 1
=
29
grounded sections of the network are wye connected and those in
ungrounded sections are three-phase and delta connected.
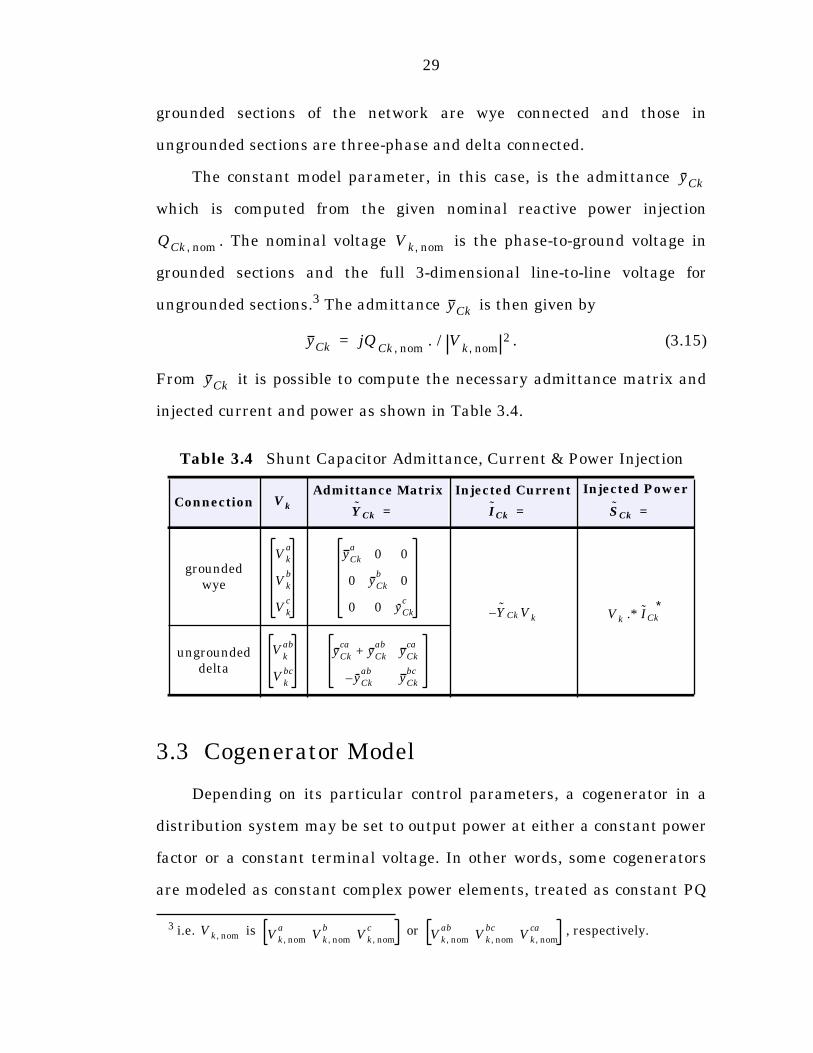
The constant model parameter, in this case, is the admittance
which is computed from the given nominal reactive power injection
. The nominal voltage is the phase-to-ground voltage in
grounded sections and the full 3-dimensional line-to-line voltage for
ungrounded sections.3 The admittance is then given by
. (3.15)
From it is possible to compute the necessary admittance matrix and
injected current and power as shown in Table 3.4.
3.3 Cogenerator Model
Depending on its particular control parameters, a cogenerator in a
distribution system may be set to output power at either a constant power
factor or a constant terminal voltage. In other words, some cogenerators
are modeled as constant complex power elements, treated as constant PQ
3 i.e. is or , respectively.
Table 3.4 Shunt Capacitor Admittance, Current & Power Injection
ConnectionAdmittance Matrix Injected Current Injected Power
grounded wye
ungrounded delta
yCk
QCk nom, Vk nom,
yCk
Vk nom, Vk nom,a
Vk nom,b
Vk nom,c
Vk nom,ab
Vk nom,bc
Vk nom,ca
yCk jQCk nom, V
k nom,2. /=
yCk
Vk YCk = ICk = SCk =
Vka
Vkb
Vkc
yCka
0 0
0 yCkb
0
0 0 yCkc
YCkVk– Vk ICk∗
.*
Vkab
Vkbc
yCkca
yCkab
+ yCkca
yCkab
– yCkbc
30
loads with positive, as opposed to negative, real power injection. Others are
modeled as PV buses. This second type of cogenerator cannot be handled
directly by the radial power flow programs presented here. However,
Chapter 7 presents some extensions to the radial power flow methods
which do handle PV buses. Even in this case, each PV bus is treated as a
constant complex power element during any given iteration of the power
flow algorithm. It is therefore sufficient to present only the relevant formu-
las for constant PQ cogenerators.
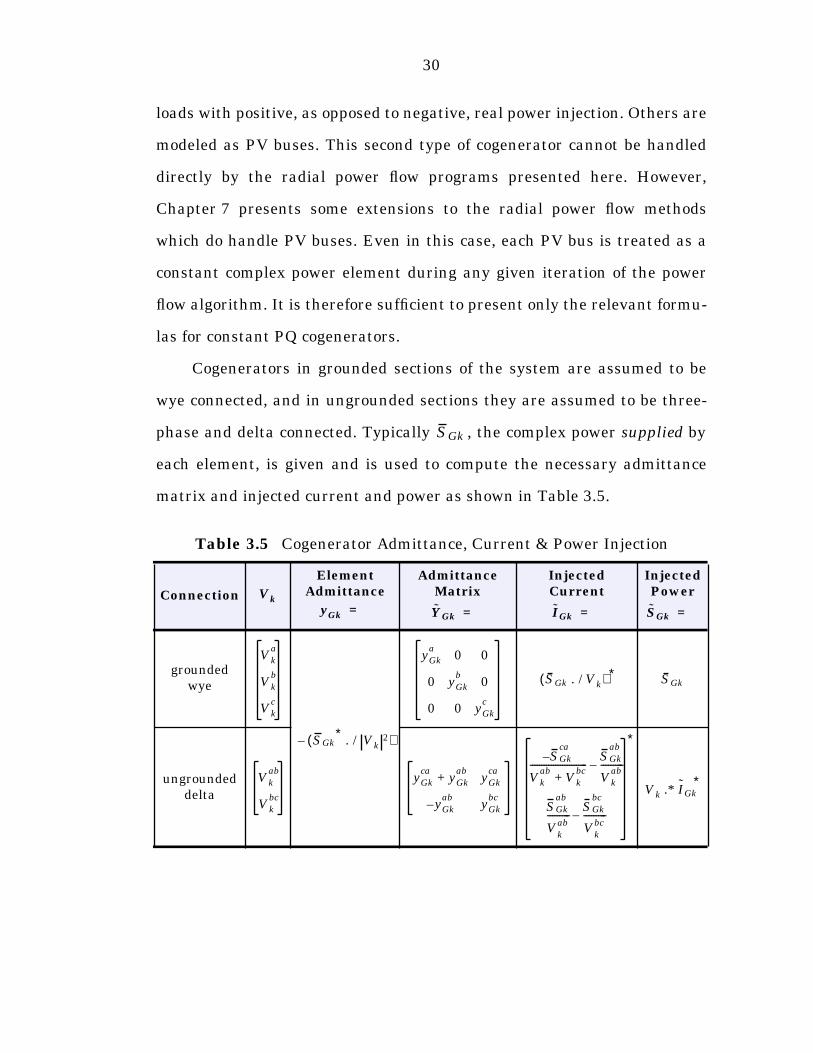
Cogenerators in grounded sections of the system are assumed to be
wye connected, and in ungrounded sections they are assumed to be three-
phase and delta connected. Typically , the complex power supplied by
each element, is given and is used to compute the necessary admittance
matrix and injected current and power as shown in Table 3.5.
Table 3.5 Cogenerator Admittance, Current & Power Injection
Connection
ElementAdmittance
AdmittanceMatrix
InjectedCurrent
InjectedPower
grounded wye
ungrounded delta
SGk
VkyGk = YGk = IGk = SGk =
Vka
Vkb
Vkc
SGk∗ Vk
2. /( )–
yGka
0 0
0 yGkb
0
0 0 yGkc
SGk Vk. /( ) ∗ SGk
Vkab
Vkbc
yGkca
yGkab
+ yGkca
yGkab
– yGkbc
S– Gkca
Vkab
Vkbc
+-------------------------
SGkab
Vkab
----------–
SGkab
Vkab
----------SGk
bc
Vkbc
----------–
∗
Vk IGk∗
.*
31
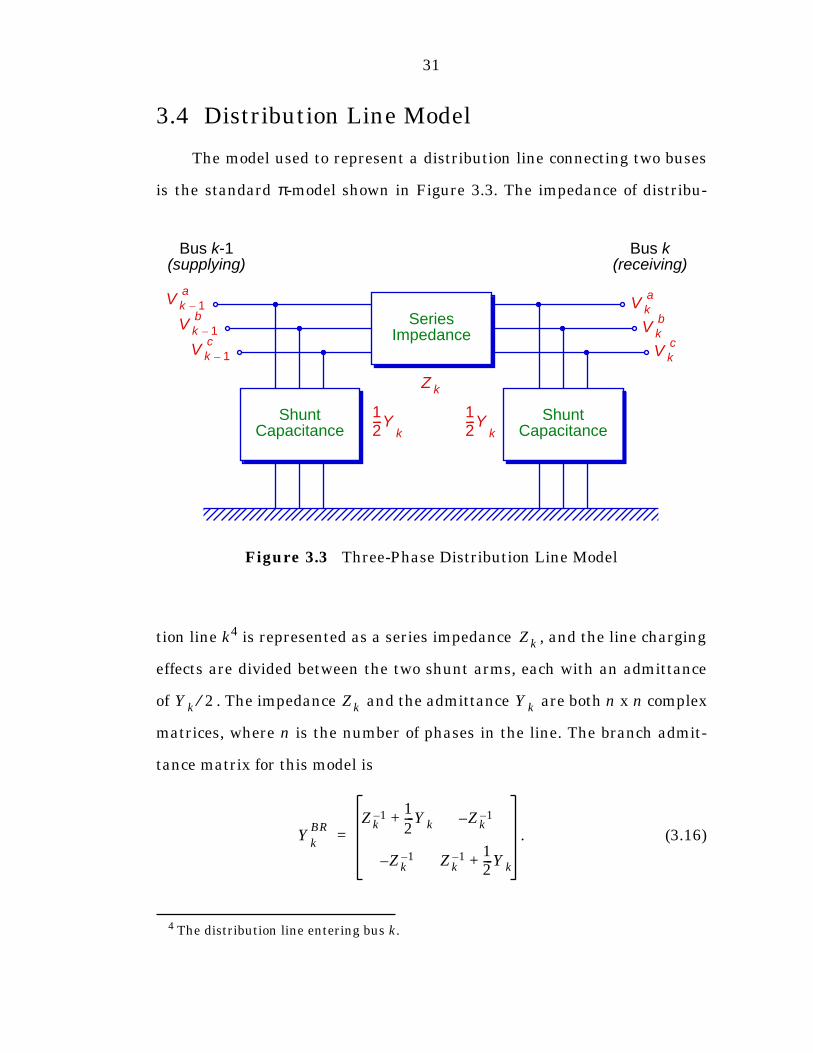
3.4 Distribution Line Model
The model used to represent a distribution line connecting two buses
is the standard π-model shown in Figure 3.3. The impedance of distribu-
tion line k4 is represented as a series impedance , and the line charging
effects are divided between the two shunt arms, each with an admittance
of . The impedance and the admittance are both n x n complex
matrices, where n is the number of phases in the line. The branch admit-
tance matrix for this model is
. (3.16)
4 The distribution line entering bus k.
Figure 3.3 Three-Phase Distribution Line Model
V kb
V kc
SeriesImpedance
ShuntCapacitance
V k 1–a
V k 1–b
V k 1–c
V ka
ShuntCapacitance
Bus k-1 Bus k(supplying) (receiving)
12---Y
k
Z k
12---Y
k
Zk
Yk 2⁄ Zk Yk
YkBR
Zk1– 1
2---Yk+ Zk
1––
Zk1–– Zk
1– 12---Yk+
=
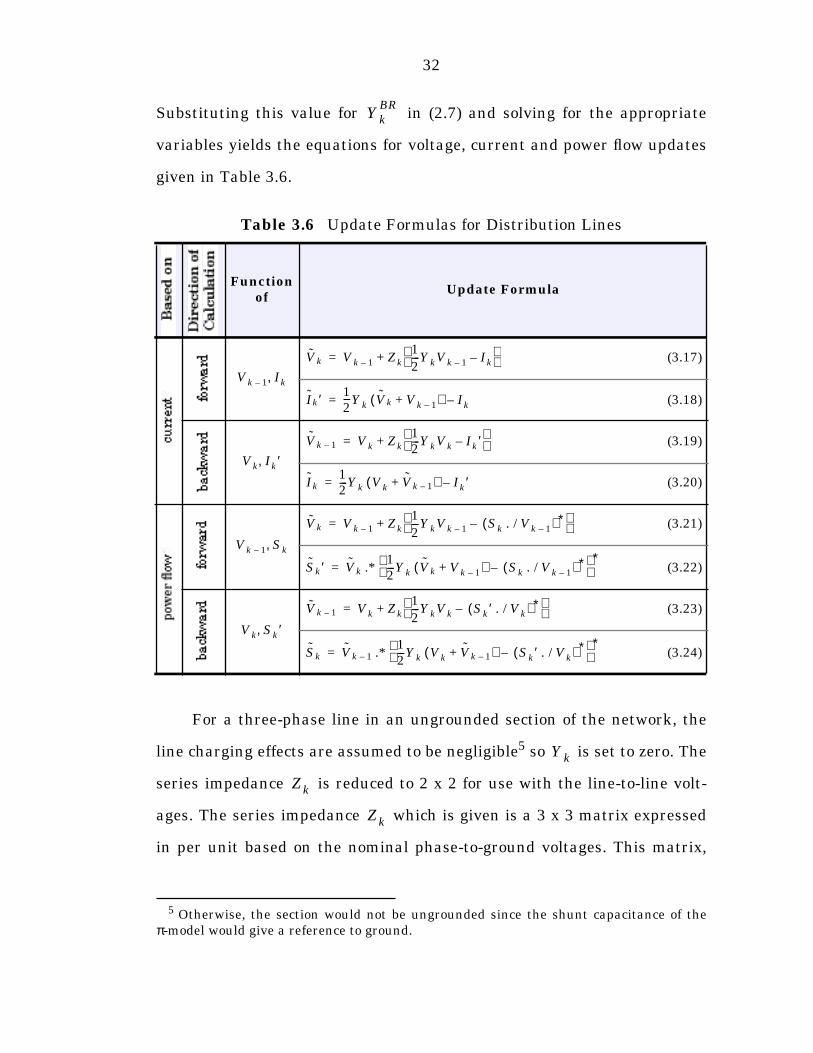
32
Substituting this value for in (2.7) and solving for the appropriate
variables yields the equations for voltage, current and power flow updates
given in Table 3.6.
For a three-phase line in an ungrounded section of the network, the
line charging effects are assumed to be negligible5 so is set to zero. The
series impedance is reduced to 2 x 2 for use with the line-to-line volt-
ages. The series impedance which is given is a 3 x 3 matrix expressed
in per unit based on the nominal phase-to-ground voltages. This matrix,
5 Otherwise, the section would not be ungrounded since the shunt capacitance of theπ-model would give a reference to ground.
Table 3.6 Update Formulas for Distribution Lines
Functionof
Update Formula
(3.17)
(3.18)
(3.19)
(3.20)
(3.21)
(3.22)
(3.23)
(3.24)
YkBR
Vk 1– Ik,Vk Vk 1– Zk
12---YkVk 1– Ik–
+=
Ik′ 12---Yk Vk Vk 1–+( ) Ik–=
Vk Ik′,Vk 1– Vk Zk
12---YkVk Ik′–
+=
Ik12---Yk Vk Vk 1–+( ) Ik′–=
Vk 1– Sk,Vk Vk 1– Zk
12---YkVk 1– Sk Vk 1–. /( ) ∗–
+=
Sk′ Vk12---Yk Vk Vk 1–+( ) Sk Vk 1–. /( ) ∗–
∗.*=
Vk Sk′,Vk 1– Vk Zk
12---YkVk Sk′ Vk. /( ) ∗–
+=
Sk Vk 1–12---Yk Vk Vk 1–+( ) Sk′ Vk. /( ) ∗–
∗.*=
Yk
Zk
Zk

33
denoted by , relates the phase-to-ground voltages to the phase cur-
rents.
(3.25)
The desired series impedance, denoted by , is a 2 x 2 matrix relating
the line-to-line voltages to the phase currents as follows:
(3.26)
This impedance is expressed in per unit based on the nominal line-to-line
voltage and can be computed from as follows:
, (3.27)
where the factor of is due to the change of per unit voltage base.
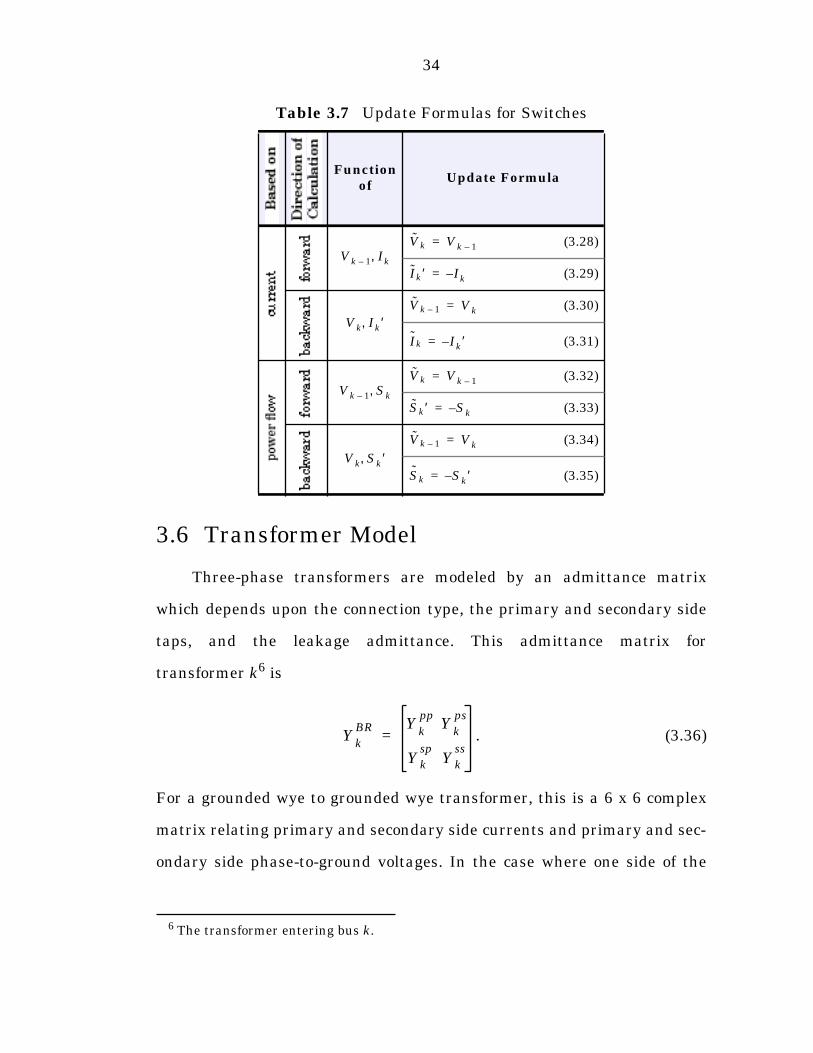
3.5 Switch Model
Sectionalizing switches are modeled as branches with zero imped-
ance. For a switch between bus and bus k, the voltage and current (or
power flow) at bus k can be computed directly from the voltage and current
(or power flow) at bus and vice versa from the formulas given in
Table 3.7, with no need to express the model using an admittance matrix.
Zkphase
Ika
Ikb
Ikc
Zkphase
Vka
Vkb
Vkc
Vk 1–a
Vk 1–b
Vk 1–c
–
=
Zkline
Ika
Ikb
Zkline Vk
ab
Vkbc
Vk 1–ab
Vk 1–bc
–
=
Zkphase
Zkline 1 1– 0
0 1 1–
13---Zk
phase1 0
0 11– 1–
⋅ ⋅=
13---
k 1–
k 1–
34
3.6 Transformer Model
Three-phase transformers are modeled by an admittance matrix
which depends upon the connection type, the primary and secondary side
taps, and the leakage admittance. This admittance matrix for
transformer k6 is
. (3.36)
For a grounded wye to grounded wye transformer, this is a 6 x 6 complex
matrix relating primary and secondary side currents and primary and sec-
ondary side phase-to-ground voltages. In the case where one side of the
6 The transformer entering bus k.
Table 3.7 Update Formulas for Switches
Functionof
Update Formula
(3.28)
(3.29)
(3.30)
(3.31)
(3.32)
(3.33)
(3.34)
(3.35)
Vk 1– Ik,Vk Vk 1–=
Ik′ Ik–=
Vk Ik′,Vk 1– Vk=
Ik Ik′–=
Vk 1– Sk,Vk Vk 1–=
Sk′ Sk–=
Vk Sk′,Vk 1– Vk=
Sk Sk′–=
YkBR Y
kpp
Ykps
Yksp
Ykss
=
35
transformer is ungrounded, such as a delta or ungrounded wye connection,
line-to-line voltages are used and the dimension of the admittance matrix
is reduced to 5 x 5. If both sides are ungrounded, line-to-line voltages are
used on both sides and the dimension of is 4 x 4.
In the following sections, the primary side taps for transformer k are
denoted by , the secondary side taps by , and the per unit leakage
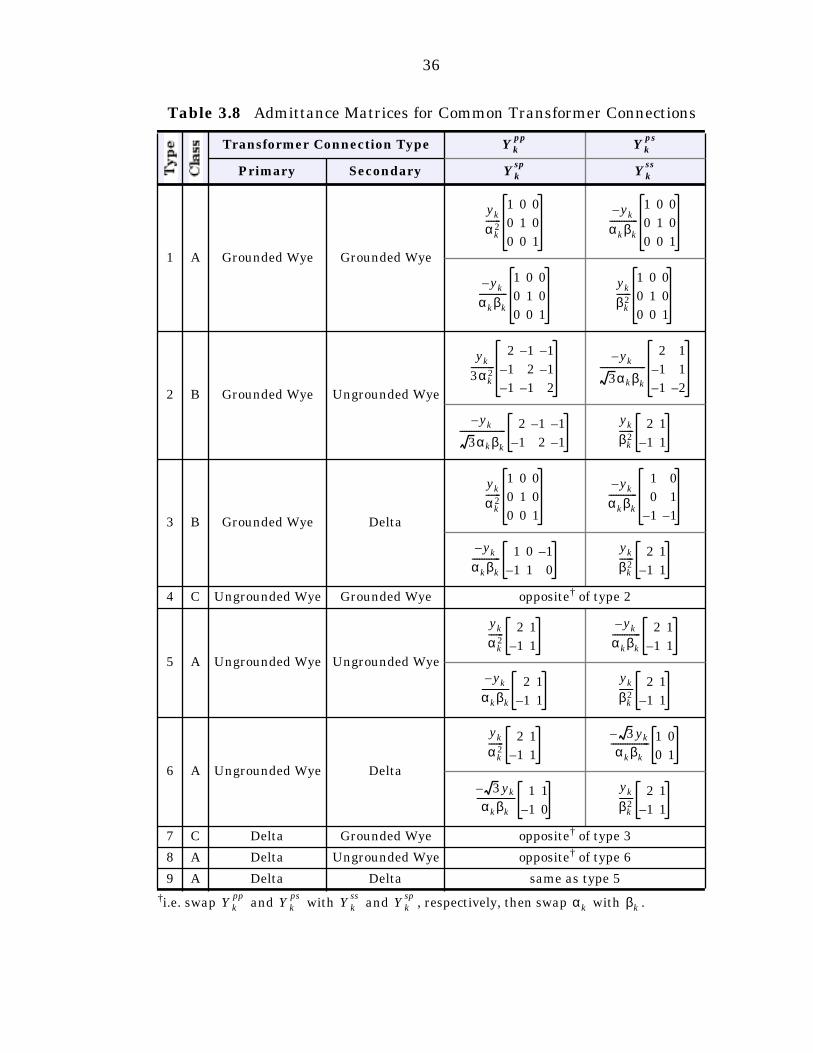
admittance per phase by . The admittance matrices for common trans-
former connections are given in Table 3.8. To simplify the presentation of
the relevant update formulas, the various transformer types are divided
into three classes based on the grounding of their connections.
3.6.1 Class A: Primary and Secondary both Grounded or both Ungrounded
The simplest class of transformer connections will be presented first.
This is the class of transformers which are either grounded on both sides or
ungrounded on both sides. This includes connection types 1, 5, 6, 8, and 9.
In this case, each submatrix of is square and non-singular so (3.36)
can be substituted into (2.7) to solve directly for the appropriate variables.
The resulting update formulas are given in Table 3.9.
3.6.2 Class B: Grounded Primary—Ungrounded Secondary
The second class of transformer connections to be presented is the
class of transformers with grounded primary side and ungrounded second-
ary side. This includes connection types 2 and 3. For these transformers,
the voltage, current, and power flow on the primary side are three-dimen-
sional quantities, but on the secondary side they are two-dimensional
quantities. There is a constraint, however, on the primary side currents
YkBR
αk βk
yk
YkBR
36
†i.e. swap and with and , respectively, then swap with .
Table 3.8 Admittance Matrices for Common Transformer Connections
Transformer Connection Type
Primary Secondary
1 A Grounded Wye Grounded Wye
2 B Grounded Wye Ungrounded Wye
3 B Grounded Wye Delta
4 C Ungrounded Wye Grounded Wye opposite† of type 2
5 A Ungrounded Wye Ungrounded Wye
6 A Ungrounded Wye Delta
7 C Delta Grounded Wye opposite† of type 3
8 A Delta Ungrounded Wye opposite† of type 6
9 A Delta Delta same as type 5
Ykpp
Ykps
Yksp
Ykss
yk
αk2
------1 0 0
0 1 0
0 0 1
yk–
αkβk
------------1 0 0
0 1 0
0 0 1
yk–
αkβk
------------1 0 0
0 1 0
0 0 1
yk
βk2
------1 0 0
0 1 0
0 0 1
yk
3αk2
----------2 1– 1–
1– 2 1–
1– 1– 2
yk–
3αkβk
--------------------2 1
1– 1
1– 2–
yk–
3αkβk
-------------------- 2 1– 1–
1– 2 1–
yk
βk2
------ 2 1
1– 1
yk
αk2
------1 0 0
0 1 0
0 0 1
yk–
αkβk
------------1 0
0 1
1– 1–
yk–
αkβk
------------ 1 0 1–
1– 1 0
yk
βk2
------ 2 1
1– 1
yk
αk2
------ 2 1
1– 1
yk–
αkβk
------------ 2 1
1– 1
yk–
αkβk
------------ 2 1
1– 1
yk
βk2
------ 2 1
1– 1
yk
αk2
------ 2 1
1– 1
3yk–
αkβk
----------------- 1 0
0 1
3yk–
αkβk
----------------- 1 1
1– 0
yk
βk2
------ 2 1
1– 1
Ykpp
Ykps
Ykss
Yksp αk βk

37
which effectively restricts it to two degrees of freedom. This constraint can
be expressed in terms of the sum of the currents on the primary side,
denoted by . For the type 2 grounded wye to ungrounded
wye case, the primary currents must sum to zero.
(3.45)
For type 3 grounded wye to delta connections, the sum of the primary cur-
rents is related to the sum of the primary voltages as follows:
, (3.46)
where .
In attempting to solve for the secondary voltage , (2.7) yields
, (3.47)
Table 3.9 Update Formulas for Class A Transformers
Functionof
Update Formula
(3.37)
(3.38)
(3.39)
(3.40)
(3.41)
(3.42)
(3.43)
(3.44)
Vk 1– Ik,Vk Yk
ps( ) 1–Ik Yk
ppVk 1––( )=
Ik′ Yksp
Vk 1– Ykss
Vk+=
Vk Ik′,Vk 1– Yk
sp( ) 1–Ik′ Yk
ssVk–( )=
Ik Ykpp Vk 1– Y
kpsV
k+=
Vk 1– Sk,Vk Yk
ps( ) 1–Sk Vk 1–. /( ) ∗ Yk
ppVk 1––( )=
Sk′ Vk YkspVk 1– Yk
ss Vk+( ) ∗.*=
Vk Sk′,Vk 1– Yk
sp( ) 1–Sk′ Vk. /( ) ∗ Yk
ssVk–( )=
Sk Vk 1– Ykpp
Vk 1– Ykps
Vk+( ) ∗.*=
IkΣ
Ika
Ikb
Ikc
+ +=
IkΣ
0=
IkΣ yk
αk2
------Vk 1–Σ
=
Vk 1–Σ
Vk 1–a
Vk 1–b
Vk 1–c
+ +=
Vk
Ykps
Vk
Ik
Ykpp
Vk 1––=

38
where is 3 x 2. This equation has a unique solution for only if
satisfies the appropriate constraint above, in which case one of the three
rows of (3.47) becomes redundant. Using the notation from Table 2.1, the
solution to this equation can be written as in (3.50) in Table 3.10.
Consider trying to solve for the primary side voltage from the lower
half of (2.7).
(3.48)
In this case, is 2 x 3 and, consequently, the secondary voltage and cur-
rent do not uniquely specify the primary voltage. It is only possible to solve
for if it is assumed that some information is already given, such as
the sum of the primary side voltages . If this information is given, the
solution to (3.48) can be written as in (3.52). In this case, used in (2.3)
must include .
(3.49)
So, for forward calculation, there is a constraint on the sum of the pri-
mary side currents. For backward calculation, information about the sum
of the primary side voltages must be available. Assuming these conditions
are met, the expressions for the updates can be written as shown in
Table 3.10.
Ykps
Vk IkΣ
Yksp
Vk 1– Ik′ Ykss
Vk–=
Yksp
Vk 1–
Vk 1–Σ
wk
Vk 1–Σ
wk
Vk
Vk 1–Σ
Ik 1+
=
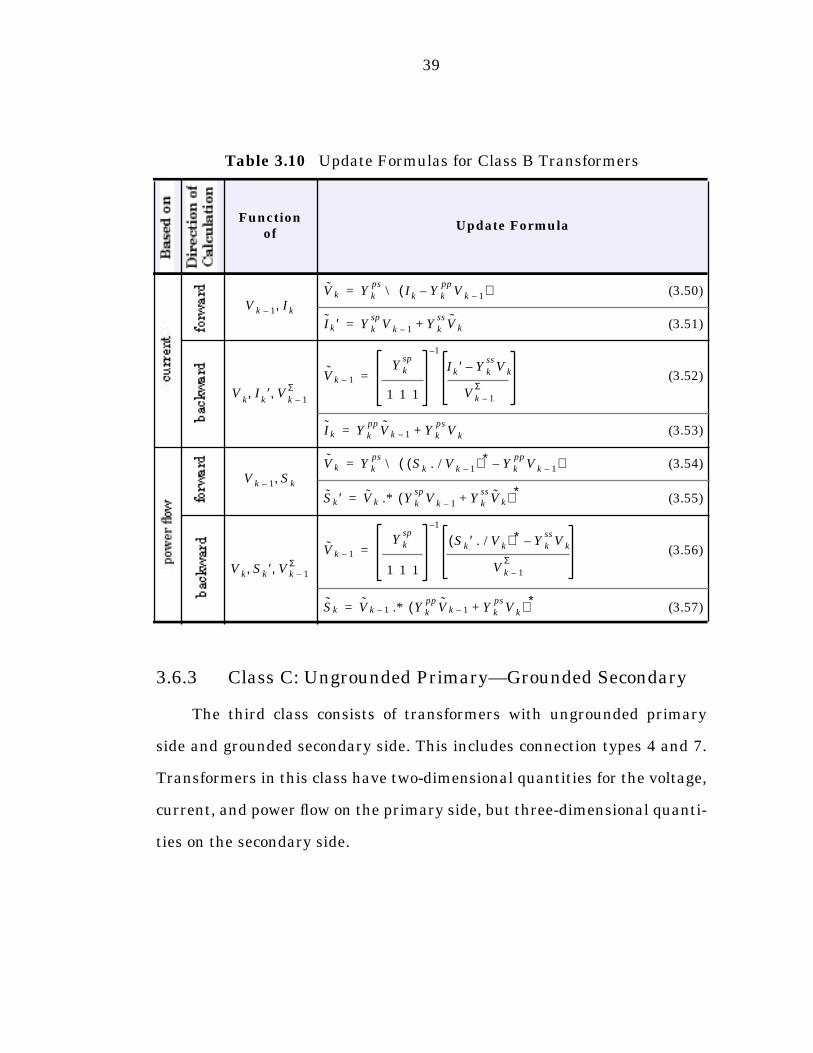
39
3.6.3 Class C: Ungrounded Primary—Grounded Secondary
The third class consists of transformers with ungrounded primary
side and grounded secondary side. This includes connection types 4 and 7.
Transformers in this class have two-dimensional quantities for the voltage,
current, and power flow on the primary side, but three-dimensional quanti-
ties on the secondary side.
Table 3.10 Update Formulas for Class B Transformers
Functionof
Update Formula
(3.50)
(3.51)
(3.52)
(3.53)
(3.54)
(3.55)
(3.56)
(3.57)
Vk 1– Ik,Vk Yk
psIk Yk
ppVk 1––( )\=
Ik′ Yksp
Vk 1– Ykss
Vk+=
Vk
Ik′ V
k 1–Σ, ,
Vk 1–
Yksp
1 1 1
1–
Ik′ Ykss
Vk–
Vk 1–Σ
=
Ik Ykpp
Vk 1– Ykps
Vk+=
Vk 1– Sk,Vk Yk
psSk Vk 1–. /( ) ∗ Yk
ppVk 1––( )\=
Sk′ Vk Yksp
Vk 1– Ykss
Vk+( ) ∗.*=
Vk Sk′ Vk 1–Σ, ,
Vk 1–
Yksp
1 1 1
1–
Sk′ Vk. /( ) ∗ Ykss
Vk–
Vk 1–Σ
=
Sk Vk 1– Ykpp
Vk 1– Ykps
Vk+( ) ∗.*=

40
In this case, the constraint on the sum of the currents is on the sec-
ondary side, i.e. on , and thus affects the backward cal-
culation. For the type 4 ungrounded wye to grounded wye case,
. (3.58)
For type 7 delta to grounded wye connections, the constraint on the current
is related to the sum of the secondary voltages .
(3.59)
Since is 3 x 2, the appropriate constraint above must be satisfied in
order to solve (3.48) for the primary voltage . The solution can be
expressed as in (3.63) in Table 3.11.
Forward calculation with transformers of class C is similar to back-
ward calculation with class B transformers. In this case, is 2 x 3 and
more information is needed to solve for a unique secondary voltage
from the primary voltage and current. If the sum of the secondary voltage
is known, that is sufficient to specify the secondary voltage completely.
However, in the power flow algorithms proposed in this dissertation, it is
actually current information, rather than voltage information, which is
available at the secondary side. For type 7 delta to grounded wye trans-
formers, (3.59) can be used to solve for from the sum of the secondary
current , allowing to be expressed as in (3.61). Here of (2.2)
must include .
(3.60)
IkΣ′ Ik
a′ Ikb′ Ik
c ′+ +=
IkΣ′ 0=
VkΣ
Vka
Vkb
Vkc
+ +=
IkΣ′
yk
βk2
------VkΣ
=
Yksp
Vk 1–
Ykps
Vk
VkΣ
VkΣ
IkΣ′ V
kw
k 1–
IkΣ′
wk 1–
Vk 1–
Ik
IkΣ′
=
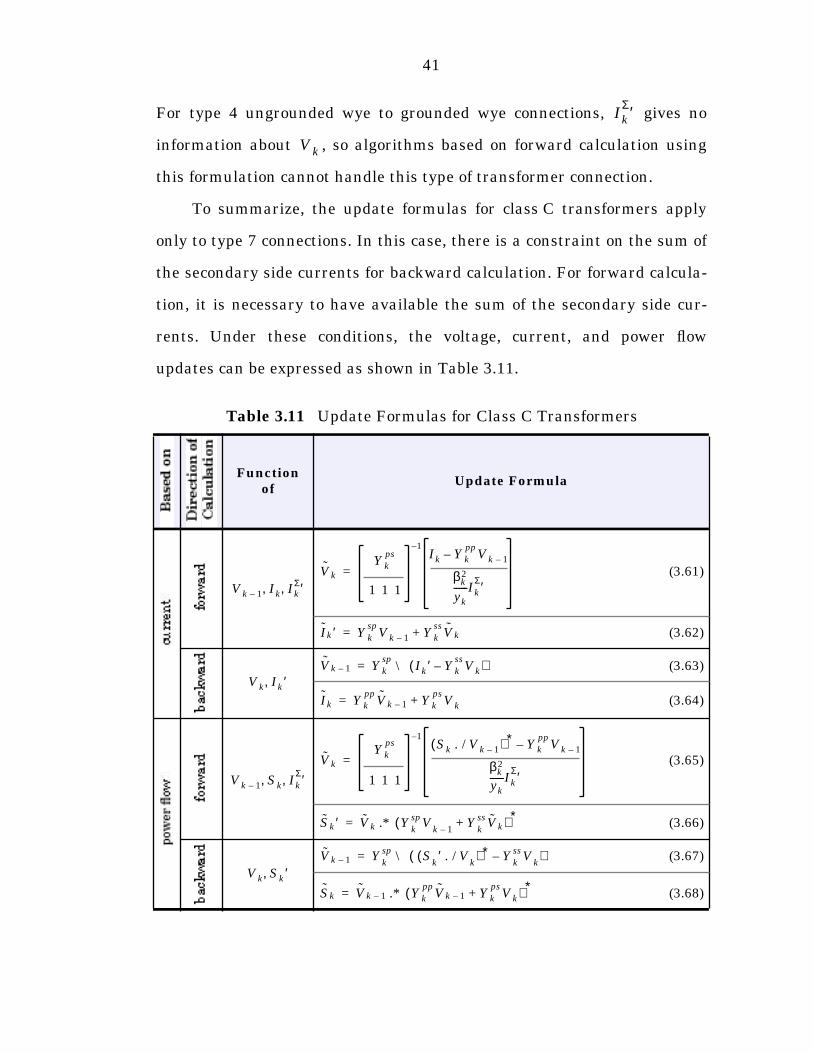
41
For type 4 ungrounded wye to grounded wye connections, gives no
information about , so algorithms based on forward calculation using
this formulation cannot handle this type of transformer connection.
To summarize, the update formulas for class C transformers apply
only to type 7 connections. In this case, there is a constraint on the sum of
the secondary side currents for backward calculation. For forward calcula-
tion, it is necessary to have available the sum of the secondary side cur-
rents. Under these conditions, the voltage, current, and power flow
updates can be expressed as shown in Table 3.11.
Table 3.11 Update Formulas for Class C Transformers
Functionof
Update Formula
(3.61)
(3.62)
(3.63)
(3.64)
(3.65)
(3.66)
(3.67)
(3.68)
IkΣ′
Vk
Vk 1– Ik IkΣ′, ,
Vk
Ykps
1 1 1
1–Ik Yk
ppVk 1––
βk2
yk
------IkΣ′
=
Ik′ Yksp
Vk 1– Ykss
Vk+=
Vk Ik′,Vk 1– Yk
spIk′ Yk
ssVk–( )\=
Ik Ykpp
Vk 1– Ykps
Vk+=
Vk 1– Sk IkΣ′, ,
Vk
Ykps
1 1 1
1–Sk Vk 1–. /( ) ∗ Yk
ppVk 1––
βk2
yk------Ik
Σ′=
Sk′ Vk YkspV
k 1–Y
kss Vk+( ) ∗.*=
Vk Sk′,Vk 1– Y
ksp S
k′ V
k. /( ) ∗ Y
kssV
k–( )\=
Sk Vk 1– Ykpp
Vk 1– Ykps
Vk+( ) ∗.*=
42
Chapter 4
Network Reduction Power Flow Algorithms for Radial Systems (NR-PARS)
The solution to the power flow problem is typically viewed as the solu-
tion to a set of power balance equations. It is possible, however, to look at
the problem from a circuit theory point of view. The distribution system, in
this context, is a circuit with one compound (three-phase) voltage source,
many constant impedance elements, and possibly some constant current
elements and some elements with a non-linear relationship between volt-
age and current (the constant power elements).
If each non-linear element is replaced by a linear element which is
equivalent in some sense, the new system can be solved using the standard
methods of nodal or loop analysis for linear circuits. Recomputing the lin-
ear equivalents at the new solution and repeating yields a basic iterative
method for solving the distribution power flow problem. In fact, this is
exactly the idea behind some of the Z-matrix methods in [9; 10; 25; 27].
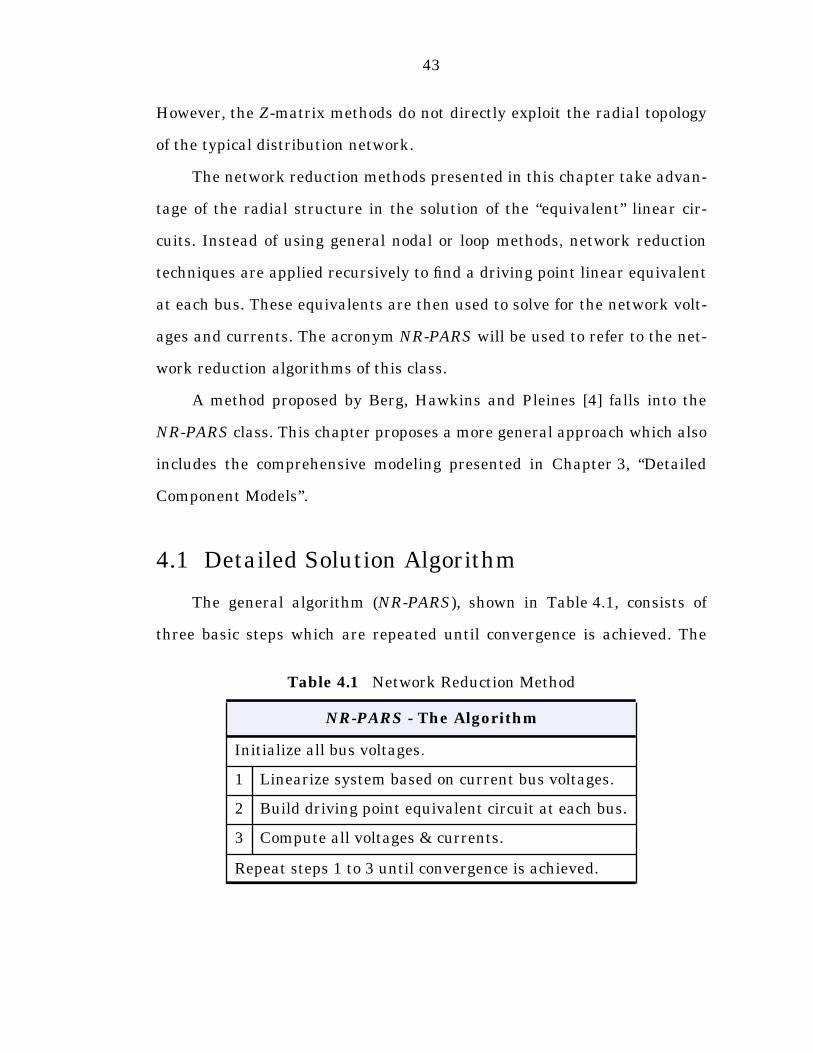
43
However, the Z-matrix methods do not directly exploit the radial topology
of the typical distribution network.
The network reduction methods presented in this chapter take advan-
tage of the radial structure in the solution of the “equivalent” linear cir-
cuits. Instead of using general nodal or loop methods, network reduction
techniques are applied recursively to find a driving point linear equivalent
at each bus. These equivalents are then used to solve for the network volt-
ages and currents. The acronym NR-PARS will be used to refer to the net-
work reduction algorithms of this class.
A method proposed by Berg, Hawkins and Pleines [4] falls into the
NR-PARS class. This chapter proposes a more general approach which also
includes the comprehensive modeling presented in Chapter 3, “Detailed
Component Models”.
4.1 Detailed Solution Algorithm
The general algorithm (NR-PARS), shown in Table 4.1, consists of
three basic steps which are repeated until convergence is achieved. The
Table 4.1 Network Reduction Method
NR-PARS - The Algorithm
Initialize all bus voltages.
1 Linearize system based on current bus voltages.
2 Build driving point equivalent circuit at each bus.
3 Compute all voltages & currents.
Repeat steps 1 to 3 until convergence is achieved.
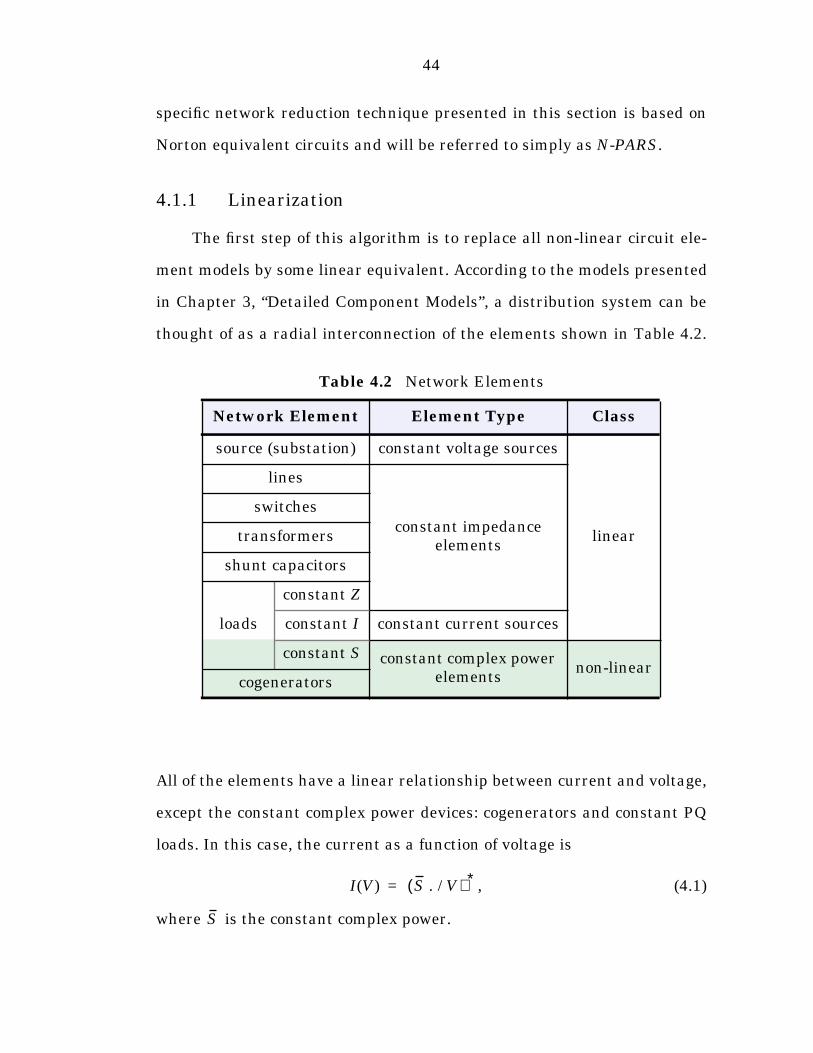
44
specific network reduction technique presented in this section is based on
Norton equivalent circuits and will be referred to simply as N-PARS.
4.1.1 Linearization
The first step of this algorithm is to replace all non-linear circuit ele-
ment models by some linear equivalent. According to the models presented
in Chapter 3, “Detailed Component Models”, a distribution system can be
thought of as a radial interconnection of the elements shown in Table 4.2.
All of the elements have a linear relationship between current and voltage,
except the constant complex power devices: cogenerators and constant PQ
loads. In this case, the current as a function of voltage is
, (4.1)
where is the constant complex power.
Table 4.2 Network Elements
Network Element Element Type Class
source (substation) constant voltage sources
linear
lines
constant impedanceelements
switches
transformers
shunt capacitors
constant Z
loads constant I constant current sources
constant S constant complex power elements
non-linearcogenerators
I V( ) S V. /( ) ∗=
S
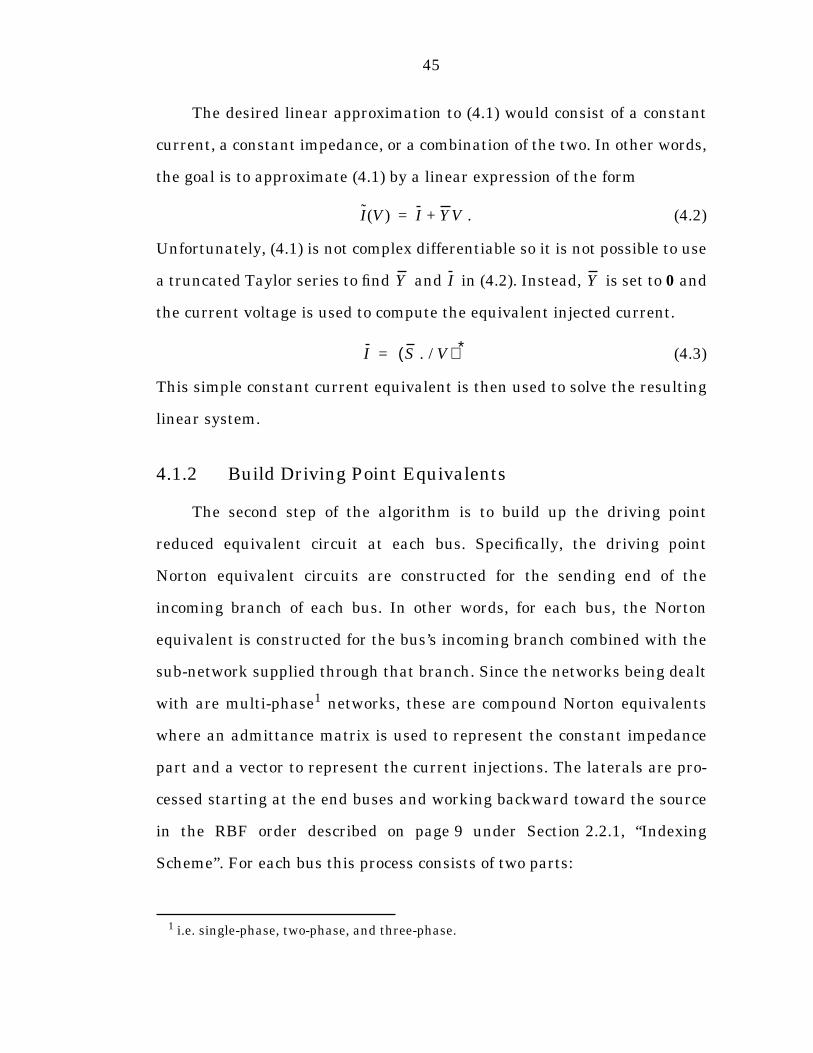
45
The desired linear approximation to (4.1) would consist of a constant
current, a constant impedance, or a combination of the two. In other words,
the goal is to approximate (4.1) by a linear expression of the form
. (4.2)
Unfortunately, (4.1) is not complex differentiable so it is not possible to use
a truncated Taylor series to find and in (4.2). Instead, is set to 0 and
the current voltage is used to compute the equivalent injected current.
(4.3)
This simple constant current equivalent is then used to solve the resulting
linear system.
4.1.2 Build Driving Point Equivalents
The second step of the algorithm is to build up the driving point
reduced equivalent circuit at each bus. Specifically, the driving point
Norton equivalent circuits are constructed for the sending end of the
incoming branch of each bus. In other words, for each bus, the Norton
equivalent is constructed for the bus’s incoming branch combined with the
sub-network supplied through that branch. Since the networks being dealt
with are multi-phase1 networks, these are compound Norton equivalents
where an admittance matrix is used to represent the constant impedance
part and a vector to represent the current injections. The laterals are pro-
cessed starting at the end buses and working backward toward the source
in the RBF order described on page 9 under Section 2.2.1, “Indexing
Scheme”. For each bus this process consists of two parts:
1 i.e. single-phase, two-phase, and three-phase.
I V( ) I YV+=
Y I Y
I S V. /( ) ∗=
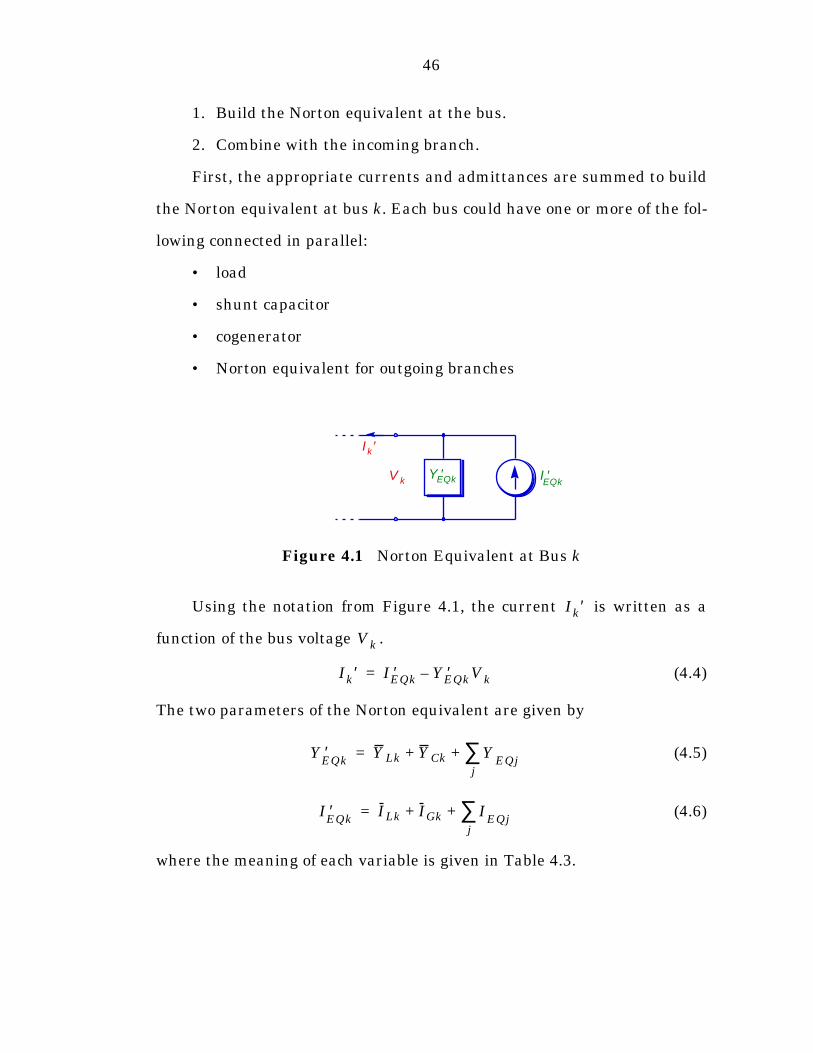
46
1. Build the Norton equivalent at the bus.
2. Combine with the incoming branch.
First, the appropriate currents and admittances are summed to build
the Norton equivalent at bus k. Each bus could have one or more of the fol-
lowing connected in parallel:
• load
• shunt capacitor
• cogenerator
• Norton equivalent for outgoing branches
Using the notation from Figure 4.1, the current is written as a
function of the bus voltage .
(4.4)
The two parameters of the Norton equivalent are given by
(4.5)
(4.6)
where the meaning of each variable is given in Table 4.3.
Figure 4.1 Norton Equivalent at Bus k
Y ′EQk I ′EQk
V k
I k ′
Ik′
Vk
Ik′ I ′EQk Y ′EQkVk–=
Y ′EQk
Y Lk YCk YEQj
j∑+ +=
I ′EQk
ILk IGk IEQj
j∑+ +=
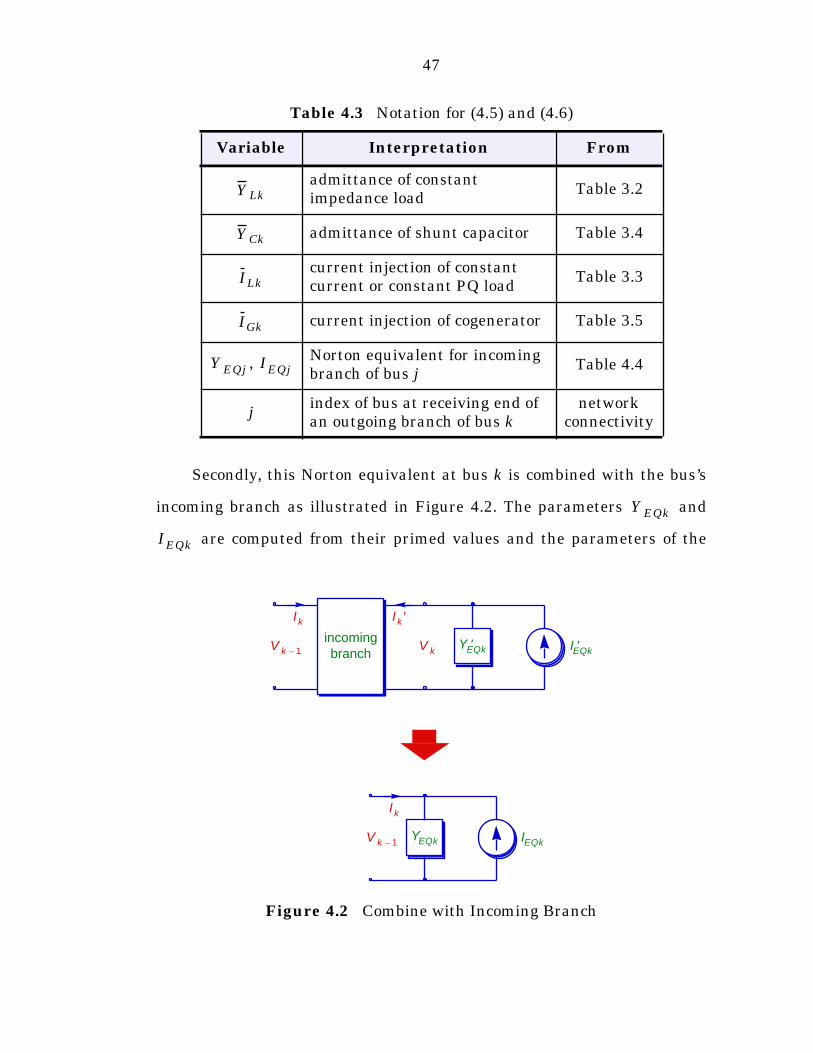
47
Secondly, this Norton equivalent at bus k is combined with the bus’s
incoming branch as illustrated in Figure 4.2. The parameters and
are computed from their primed values and the parameters of the
Table 4.3 Notation for (4.5) and (4.6)
Variable Interpretation From
admittance of constantimpedance load
Table 3.2
admittance of shunt capacitor Table 3.4
current injection of constant current or constant PQ load
Table 3.3
current injection of cogenerator Table 3.5
, Norton equivalent for incoming branch of bus j
Table 4.4
jindex of bus at receiving end of an outgoing branch of bus k
networkconnectivity
Figure 4.2 Combine with Incoming Branch
Y Lk
YCk
ILk
IGk
Y EQj IEQj
Y EQk
IEQk
YEQk IEQk
Y ′EQk I ′EQkV k
I k ′incomingbranch
I k
V k 1–
I k
V k 1–

48
branch. To accomplish this, (2.7) and (4.4) are combined so as to eliminate
the variables and , yielding the following expression of as a func-
tion of .
(4.7)
This is in the same form as the relationship between current and voltage
for the combined Norton equivalent
, (4.8)
making it possible to extract directly from (4.7) the expressions for
and .
Table 4.4 gives the resulting formulas for each of the three types of
branches. Since a switch is modeled as a zero impedance connection, it is
not necessary to use (4.7). The parameters computed at bus k are not
changed by combining them with an incoming switch.
To summarize, the driving point Norton equivalent is computed for
the incoming branch of each bus starting with the most deeply nested sub-
Table 4.4 Formulas for Combining with Incoming Branch
Branch Type Combination Formula
line
(4.9)
(4.10)
switch(4.11)
(4.12)
transformer(4.13)
(4.14)
Vk Ik′ Ik
Vk 1–
Ik Yk11
Yk12
Yk22
Y ′EQk+( ) 1–Yk
21–[ ] Vk 1–
Yk12
Yk22
Y ′EQk
+( ) 1–I ′
EQk–[ ]–
=
Ik Y EQkVk 1– IEQk–=
Y EQk
IEQk
Y EQk Zk1– 1
2---Yk Zk
1– Zk1– 1
2---Yk Y ′EQk+ +
1–Zk
1––+=
IEQk Zk1– Zk
1– 12---Yk Y′EQk+ +
1–I ′EQk=
Y EQk Y ′EQk=
IEQk I ′EQk=
Y EQk Ykpp
Ykps
Ykss
Y ′EQk+( ) 1–Yk
sp–=
IEQk
Ykps Y
kss Y ′
EQk+( ) 1– I ′
EQk–=
49
laterals and working back toward the main feeder. At each bus the proce-
dure consists of two parts. First, all of the current sources and admittances
connected in parallel at the bus are summed together to give the Norton
equivalent at the bus for the part of the network supplied through that
bus. Then, this Norton equivalent is combined with the incoming branch to
determine the driving point Norton equivalent for that branch. At the end
of this second step of the algorithm, the driving point Norton equivalent for
the incoming branch of each bus is known. In other words, any branch and
the sub-network it supplies may be replaced by its Norton equivalent for
the purposes of computation.
4.1.3 Calculate Voltages and Currents
The result of the second step of the algorithm given in Table 4.1 is
that, given the voltage at a bus, the current to each of its outgoing
branches can be easily computed from the corresponding driving point
equivalent. The third step of the algorithm is based on this result. It
involves starting at the source, where the voltage is known, and computing
voltages and currents toward the end buses.
Once again, the entire network is traversed, this time in the BF order
described on page 11 under Section 2.2.1, “Indexing Scheme”. As in the
previous step, at each bus there is a two part calculation to be performed.
First, the current is computed for the bus’s incoming branch, then the bus
voltage is updated. For bus k this means calculating then .
The new value of is computed directly from the voltage at bus
and the Norton equivalent associated with the incoming branch of bus k.
The formula is given in (4.8) which is repeated here.
Ik Vk
Ik k 1–

50
(4.15)
The second part, updating the bus voltage , is dependent on ,
, and the parameters of the branch. The upper portion of (2.7) gives
. (4.16)
If is square and non-singular this is sufficient, as in the case of a dis-
tribution line. However, for some transformer types is 2 x 3, and more
information is needed: specifically, information about the part of the net-
work connected to the secondary side of the transformer. This information
is available in the form of the Norton equivalent at bus k, that is, and
. These parameters were computed in the previous step and can be
stored for each bus whose incoming branch is a transformer. Combining
the lower half of (2.7) with (4.4) by eliminating yields an equation
which is typically solvable for . For switches, since they are zero imped-
ance, the voltage does not drop so can be taken directly from the value
at the parent bus. The resulting voltage update formulas for lines,
switches, and transformers are summarized in Table 4.5.
Table 4.5 Voltage Update Formulas
Branch Type Voltage Update Formula
line (4.17)
switch (4.18)
transformer (4.19)
Ik Y EQkVk 1– IEQk–=
Vk
Vk 1–
Ik
Yk12
Vk
Ik
Yk11
Vk 1––=
Yk12
Yk12
I ′EQk
Y ′EQk
Ik′
Vk
Vk
Vk Vk 1– Zk Ik12---YkVk 1––
–=
Vk Vk 1–=
Vk Ykss
Y ′EQk+( ) 1–I ′EQk Yk
spVk 1––( )=
51
4.1.4 Termination Criterion
The three steps, linearization, building driving point equivalents, and
computing voltages and currents, are repeated until convergence is
achieved. The algorithm is terminated when the norm of the change in
voltage from one iteration to the next is smaller than some predefined tol-
erance.2
4.2 Implementation
Several specific techniques can be used in the implementation of the
Norton reduction algorithm (N-PARS) to improve the efficiency and robust-
ness.
4.2.1 Linearity Check
It is conceivable that some networks do not contain any cogenerators
or constant PQ loads. In this case, the circuit is already a linear circuit.
Not only is the first step of the algorithm, linearization, unnecessary, but
there is no need to iterate. The circuit is solved directly in one iteration.
In the implementation, a check for non-linear components can be per-
formed at the beginning. If none are found, the program proceeds directly
to Norton reduction and terminates after one iteration. Without this check,
the program would do two iterations and find that there is no change
between iterations. The consequence of implementing this check is a 50%
savings in computation for linear networks.
2 Alternatively, the termination criterion could be based on the norm of the mismatchbetween the given power injection and the power injection computed from the voltage andcurrent injection at the current iteration.

52
4.2.2 Improved Line Update
The formulas given in (4.9) and (4.10) for combining the Norton equiv-
alent at bus k with its incoming line involve two matrix inversions. Inver-
sion of a matrix is an expensive operation in general, and may be ill-
conditioned as well, depending on the matrix.
The formulas below offer a more efficient and robust implementation.
They are equivalent to (4.9) and (4.10) but require less computation (only
one inverse instead of two) and are better conditioned for some line param-
eters.
(4.20)
(4.21)
Here I is the appropriately sized identity matrix.
4.2.3 Storage of Intermediate Variables
In the case where the circuit contains non-linear elements, the only
parameters which change from iteration to iteration are the currents
injected by these non-linear elements. In particular, as a new iteration
begins, only (for constant PQ loads) and in (4.6) take on new val-
ues based on the updated bus voltages. These changes affect only and
ultimately , but not and . These admittances remain con-
stant throughout all iterations and therefore need not be recomputed. This
means that (4.5), (4.9),3 (4.11), and (4.13) need only be computed once dur-
ing the first iteration.
3 Or (4.20) in actual implementation.
Y EQk12---Yk I
12---Yk Y ′EQk+
Zk+1–
+ 1
2---Yk Y ′EQk+
=
IEQk I12---Yk Y ′EQk+
Zk+1–I ′EQk=
ILk IGk
I ′EQk
IEQk
Y ′EQk
YEQk
53
A further savings in computation is achieved by storing the constant
coefficient of in (4.10)4 and (4.14). This reduces the second step of the
algorithm to a simple summation of the injected currents at a bus and
matrix-vector multiplication to combine with the bus’s incoming branch.
Saving these intermediate quantities and avoiding the recomputation
of the admittances is somewhat analogous to factoring Ybus only once and
saving it in a factored form in an Implicit Zbus Gauss type of power flow
algorithm such as those used in [9; 10; 27]. A more intelligent implementa-
tion could even detect areas of the network which do not contain constant
PQ elements and only perform the updates on the areas with quantities
which actually change.
4.3 Variations
There are other variations of the general network reduction power
flow method (NR-PARS) outlined in Table 4.1, “Network Reduction
Method”, on page 43. A method based on admittance equivalent only
(Y-PARS) was also implemented. Berg, Hawkins and Pleines initially pre-
sented a method based on this idea in [4], which has been extended to
include the more general modeling of Chapter 3.
Instead of Norton equivalent circuits, admittance equivalents are
used. The first step of the algorithm, linearization, now also includes con-
verting constant current elements to their constant impedance equiva-
lents. Constant current loads, constant PQ loads, and cogenerators are all
converted to the equivalent admittance via the formulas in Table 3.2 and
4 Or (4.21) in actual implementation.
I ′EQk

54
Table 3.5. These admittances are summed together to form the admittance
equivalent at bus k.
Using the notation from Figure 4.3, the current is written as a
function of the bus voltage and, since the model only includes admit-
tances, (4.4) becomes
(4.22)
and (4.5) becomes
. (4.23)
The formulas for combining the equivalent circuit at bus k with its incom-
ing branch remain the same except that only the admittance formulas are
needed.
For the third step of the algorithm, calculating voltages and currents,
similar changes are made. For computing the new value of , (4.15)
becomes simply
. (4.24)
The formulas in Table 4.5 for updating the bus voltages remain the same
except for the case of transformers. For transformers, (4.19) is replaced by
. (4.25)
Figure 4.3 Admittance Equivalent at Bus k
Y ′EQkV k
I k ′
Ik′
Vk
Ik′ Y ′EQkVk–=
Y ′EQk
Y Lk YCk YGk YEQj
j∑+ + +=
Ik
Ik
YEQk
Vk 1–=
Vk Ykss
Y ′EQk+( ) 1–Yk
spVk 1––=
55
Though the algorithm works fine, there seems to be little or no advan-
tage of Y-PARS over N-PARS. It is slightly more efficient for the case
where iteration is not necessary. However, the set of systems for which
iteration is not required has now been reduced to cases with no cogenera-
tors and only constant impedance loads. In the general iterative case, each
iteration requires all parameters to be recomputed. This is much more
computationally expensive than N-PARS implemented using the tech-
niques described in Section 4.2.3, “Storage of Intermediate Variables”.
4.4 Convergence Analysis
The convergence characteristics of N-PARS are exactly the same as
those of the familiar Z-matrix methods, including the Implicit Zbus Gauss
method [9; 10; 27]. Both N-PARS and the Z-matrix methods repeatedly
solve the linear circuit obtained by replacing all constant PQ devices with
their equivalent current injections at each iteration. In a circuit with no
constant power components, the solution is therefore obtained in a single
iteration and convergence is not an issue. For the more general case,
including constant power devices, convergence behavior is discussed in
[25]. The general conclusion is that convergence is best when load powers
are small, a condition which is met by the typical distribution system.
4.5 Comments
The power flow algorithms described in this chapter, particularly the
Norton reduction method (N-PARS), have several characteristics which
make them uniquely suited to certain situations. First of all, N-PARS is a
general method for solving the radial power flow problem which can handle

56
all of the transformer connection types listed in Table 3.8, “Admittance
Matrices for Common Transformer Connections”, on page 36. It is particu-
larly efficient for networks which contain no constant PQ elements.
The equivalent circuit parameters themselves, computed during the
solution process, may be useful for certain applications. They could be
used, for example, to replace a section of the network with a simple equiva-
lent linear model, while focusing on the effects of changes in another part
of the network.
Since the NR-PARS approaches exploit the radial structure of the net-
work, the work required for each iteration is proportional to the number of
buses. If the number of iterations remains constant, the work grows lin-
early with the size of the system, making NR-PARS suitable for very large
scale systems.
57
Chapter 5
Backward/Forward Sweep Power Flow Algorithms for Radial Systems (BFS-PARS)
One of the distinguishing features of the radial distribution network
is that there is a unique path from any given bus back to the source. This is
the key feature exploited by the backward/forward sweep class of algo-
rithms (BFS-PARS) presented in this chapter. These methods are based on
updating voltages and currents (or power flows) along these unique paths.
There are many variations to BFS-PARS. This chapter will first
present in detail a fairly general one, VI-VI-PARS, then discuss several
possible modifications which lead to the other variations. Several methods
based on the backward/forward sweep concept have been proposed by oth-
ers [3; 11; 18; 19; 20; 23]. In general, however, the approaches proposed in
the literature do not include the comprehensive modeling covered by the
general framework presented in this chapter. In fact, none of the methods
proposed in [3; 11; 18; 19; 20; 23] handle transformers of type 2, 3, 4, or 7.
In addition, [3; 19; 20; 23] only propose single-phase implementations,

58
although most of the extension to three-phase is straightforward. In this
chapter, existing variations of the backward/forward sweep approach are
extended to handle the comprehensive modeling of Chapter 3, and some
new variations are introduced.
5.1 Detailed Solution Algorithm
The general algorithm (BFS-PARS), shown in Table 5.1, consists of
two basic steps, backward sweep and forward sweep, which are repeated
until convergence is achieved. The backward sweep is primarily a current
or power flow summation with possible voltage updates. The forward
sweep is primarily a voltage drop calculation with possible current or
power flow updates.
Using the boundary condition of zero current and power flow out of
the end of each lateral, the backward sweep computes the currents or
power flows injected into the beginning of each lateral as a function of the
end voltages. The forward sweep is a function of these currents or power
Table 5.1 Backward/Forward Sweep Method
BFS-PARS - The Algorithm
Initialize all bus voltages.
1 Backward Sweep:Sum currents or power flows(and possibly update voltages).
2 Forward Sweep:Calculate voltage drops(and possibly update currents/power flows).
Repeat steps 1 and 2 until convergence is achieved.
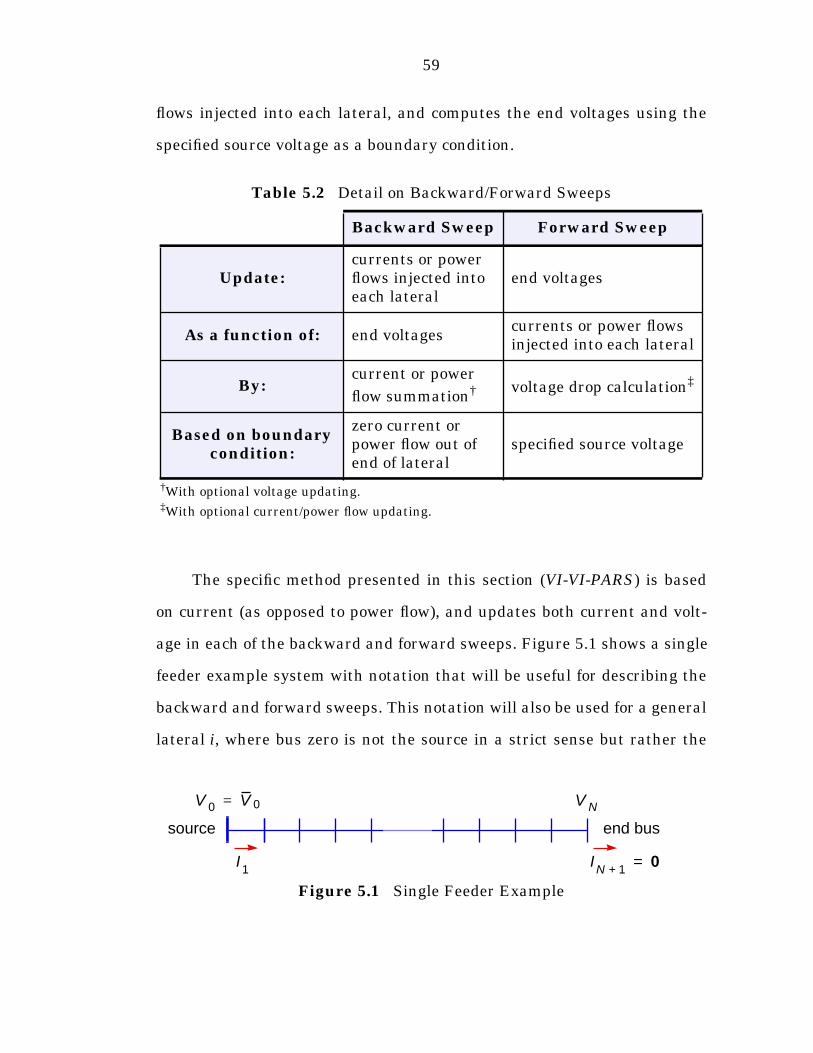
59
flows injected into each lateral, and computes the end voltages using the
specified source voltage as a boundary condition.
The specific method presented in this section (VI-VI-PARS) is based
on current (as opposed to power flow), and updates both current and volt-
age in each of the backward and forward sweeps. Figure 5.1 shows a single
feeder example system with notation that will be useful for describing the
backward and forward sweeps. This notation will also be used for a general
lateral i, where bus zero is not the source in a strict sense but rather the
†With optional voltage updating.‡With optional current/power flow updating.
Table 5.2 Detail on Backward/Forward Sweeps
Backward Sweep Forward Sweep
Update:currents or power flows injected into each lateral
end voltages
As a function of: end voltagescurrents or power flows injected into each lateral
By:current or power
flow summation† voltage drop calculation‡
Based on boundary condition:
zero current or power flow out of end of lateral
specified source voltage
Figure 5.1 Single Feeder Example
source
V 0 V 0= V N
I1 IN 1+ 0=
end bus
60
bus where lateral i branches off of lateral . The subscripts only refer to
the bus index and refers to the voltage as calculated from lateral .
5.1.1 Backward Sweep
Once the bus voltages are initialized, the algorithm begins with a
backward sweep, processing the laterals in the RBF1 order. Each lateral is
traversed from the end bus toward the source and the currents and volt-
ages are updated at each bus. At each bus k, the update formula (2.3) from
Table 2.3 is applied to compute the voltage and current at the previous bus.
(5.1)
This update formula, repeated here in (5.1), is implemented according
to the four steps detailed in Table 2.5, which is also repeated here as
Table 5.3 for convenience.
First, the currents , , and , injected by a load, shunt capac-
itor, and cogenerator, respectively, are computed from the value of the bus
voltage at the current iteration. These injected currents are found
based on the appropriate equations from Tables 3.3, 3.4, and 3.5.
1 See page 9 under Section 2.2.1, “Indexing Scheme”.
Table 5.3 Implementation of (5.1)
Procedure Details
1 Compute , , and from . see Tables 3.3 - 3.5
2 Compute via KCL at bus k. see (2.20) and (5.2)
3 Compute from and . see Tables 3.6 - 3.11
4 Compute from , and . see Tables 3.6 - 3.11
i 1–
V0 i 1–
wk 1– gk wk( )=
IGk
ICk
ILk
Vk
Ik′
Vk 1– V
kI
k′
Ik
Vk 1– V
kI
k′
ILk ICk IGk
Vk

61
The next step is to apply KCL at bus k to find the current injected
by bus k into its incoming branch. The application of KCL at bus k is
described in Section 2.3.2, “Application of KCL”, on page 19. In this case,
(2.20) is solved for to yield
(5.2)
where the currents are the currents injected into sub-laterals branching
off from bus k, and is the current injected into the outgoing branch
leading to the next bus on the same lateral.
The third and fourth steps compute the voltage and current
at the previous bus using the update formulas in Tables 3.6 through 3.11.
For each lateral, the backward sweep updates the current injected
into the lateral as a function of the end voltage. Using the notation from
the single feeder example in Figure 5.1, is updated as a function of .
Given the boundary condition and a value for , the update
formula (5.1) is applied recursively, starting at the end bus and ending at
the lateral’s supplying bus with , as shown in (5.3).
(5.3)
The lower half of the composite function , which
yields , is the desired current as a function of the end voltage and will
be denoted
Ik′
Ik′
Ik′ IGk ICk ILk I jj Ak∈∑
– Ik 1+–+ +=
I j
Ik 1+
Vk 1– Ik
I1 V N
IN 1+ 0= V N
w0
wN 1– gN wN( ) gNV
N
0
= =
wN 2– gN 1– wN 1–( ) gN 1– gN•V N
0
= =
w0
V0
I1
g1 w1( ) g1 …• gN 1– gN•• V N
0
= = =
g1 …• gN 1– gN••
w0
62
. (5.4)
This value of the current is stored for use during the KCL calculation at
this lateral’s supplying bus during the current backward sweep and the
succeeding forward sweep. The upper half, which is the voltage part, is
, and is used only for mismatch calculation. At the solution, the
mismatch between the computed voltage and the
specified voltage must be zero.
To evaluate (5.4) for a given lateral, the currents injected into all of its
sub-laterals must be known, since they are needed for the application of
KCL in (5.2). This means the laterals must be processed in a specific order,
such as the RBF1 order used here. Since the level L laterals have no sub-
laterals, they are processed first. Next, the currents injected into the sub-
laterals of all level laterals are known, so the level laterals can
be processed. Each lateral is processed in this manner, starting with
level L, then moving to level , then , etc. Finally, the main feeder
is processed, completing the backward sweep. In the process, all voltages
and currents in the network are updated. In particular, the currents
injected into each lateral are updated as a function of the end voltages.
5.1.2 Forward Sweep
The second half of each iteration of the BFS-PARS algorithm is the
forward sweep which starts at the source and moves toward the end buses.
During the forward sweep, the laterals are processed in the BF2 order.
2 See page 11 under Section 2.2.1, “Indexing Scheme”.
I1 I1 V N( )=
V0 V N( )
V0 V N( ) V0– V0 V N( )
V0
L 1– L 1–
L 1– L 2–
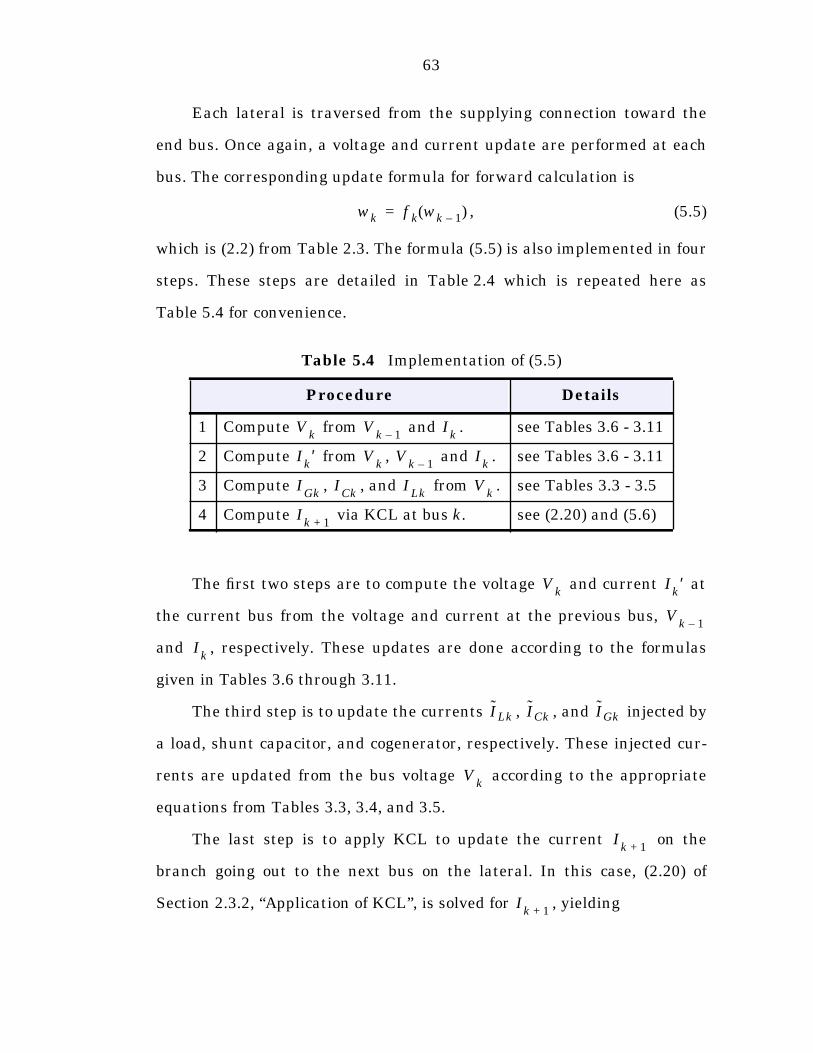
63
Each lateral is traversed from the supplying connection toward the
end bus. Once again, a voltage and current update are performed at each
bus. The corresponding update formula for forward calculation is
, (5.5)
which is (2.2) from Table 2.3. The formula (5.5) is also implemented in four
steps. These steps are detailed in Table 2.4 which is repeated here as
Table 5.4 for convenience.
The first two steps are to compute the voltage and current at
the current bus from the voltage and current at the previous bus,
and , respectively. These updates are done according to the formulas
given in Tables 3.6 through 3.11.
The third step is to update the currents , , and injected by
a load, shunt capacitor, and cogenerator, respectively. These injected cur-
rents are updated from the bus voltage according to the appropriate
equations from Tables 3.3, 3.4, and 3.5.
The last step is to apply KCL to update the current on the
branch going out to the next bus on the lateral. In this case, (2.20) of
Section 2.3.2, “Application of KCL”, is solved for , yielding
Table 5.4 Implementation of (5.5)
Procedure Details
1 Compute from and . see Tables 3.6 - 3.11
2 Compute from , and . see Tables 3.6 - 3.11
3 Compute , , and from . see Tables 3.3 - 3.5
4 Compute via KCL at bus k. see (2.20) and (5.6)
wk f k wk 1–( )=
Vk
Vk 1– I
k
Ik′ V
kV
k 1– Ik
IGk
ICk
ILk
Vk
Ik 1+
Vk
Ik′
Vk 1–
Ik
ILk ICk IGk
Vk
Ik 1+
Ik 1+

64
. (5.6)
The values for the currents injected into sub-laterals are those com-
puted during the preceding backward sweep.
For each lateral, the forward sweep updates the end voltages as a
function of the currents injected into the beginning of each lateral. In the
notation of the single feeder example of Figure 5.1, is updated as a
function of . Given the boundary condition and a value for ,
the update formula (5.5) is applied recursively starting at the lateral’s sup-
plying bus and terminating at the end bus with as shown in (5.7).
(5.7)
The upper half of the composite function , which
yields , is the desired end voltage as a function of the current injected
into the lateral and will be denoted as
. (5.8)
This end voltage is stored for use during the next backward sweep. The
lower half of the function, , is used only as a mismatch. At the
solution, this current must be zero.
To evaluate (5.8) for a given lateral, the voltage at its supplying bus
must be known since it is needed for the first step in Table 5.4. This means
Ik 1+ IGk ICk ILk I jj Ak∈∑
– Ik′–+ +=
I j
V N
I1 V0 V0= I1
wN
w1
f1
w0
( ) f1
V0
I1
= =
w2
f2
w1
( ) f2
f1
• V0
I1
= =
wN
V N
IN 1+
f N wN 1–( ) f N …• f 2 f 1•• V0
I1
= = =
f N …• f 2 f 1••
wN
VN
V N I1
( )=
IN 1+ I1( )
65
the laterals must be processed in a specific order, such as the BF2 order
used here. Since the source voltage is given, the main feeder is processed
first. Then, since the voltages at the supplying buses for all level 2 laterals
are known, the level 2 laterals can be processed, followed by level 3, etc.
Each lateral is processed in this manner until all the level L laterals have
been updated, completing the forward sweep. In the process, all voltages
and currents in the network are updated. In particular, all of the end volt-
ages are updated as a function of the currents injected into each lateral.
5.1.3 Termination Criterion
The backward and forward sweeps are repeated until convergence is
achieved. There are several ways of detecting convergence. The voltage
mismatches at the beginning of each lateral, calculated dur-
ing the backward sweep, must be zero at the solution. Likewise, the cur-
rent mismatches at the ends of the laterals, computed during the
forward sweep, must also be zero. Requiring that the norm of either of
these mismatches be smaller than some tolerance is a suitable termination
criterion.
It is also possible to use the termination criterion used for the net-
work reduction methods of Chapter 4. This approach requires that the
norm of the difference in bus voltages between iterations be smaller than a
given tolerance. In fact, this is the only one of the three approaches which
is suitable for some of the variations of BFS-PARS.
V0 V N( ) V0–
IN 1+ I1( )
66
5.2 Implementation
For the most part, the implementation of BFS-PARS is very straight-
forward. Special attention, however, is needed for laterals which contain
the class B and class C transformers. In particular, in step 3 of Table 5.3
and step 1 of Table 5.4 it is necessary to make some modifications to the
standard backward and forward sweeps described above. Consider lateral i
whose first bus k has a transformer as its incoming branch.3
5.2.1 Class B Transformers
Transformers of class B have three dimensional voltages and currents
on the primary side, while these quantities at the secondary side are two
dimensional. These transformers are described in detail in Section 3.6.2,
“Class B: Grounded Primary—Ungrounded Secondary”, where the rele-
vant update formulas are given in Table 3.10.
5.2.1.1 Backward Sweep
In step 3 of Table 5.3, the primary voltage is being computed from the
secondary voltage and current. For class B transformers, the correspond-
ing update formula is
(5.9)
from (3.52) in Table 3.10. As explained in Section 3.6.2, “Class B: Grounded
Primary—Ungrounded Secondary”, it is only possible to solve for if it
3 Due to the implementation explained in Section 2.2.2.2, “Breadth-First Search”, trans-formers always appear as the first branch on a lateral.
Vk 1–Yk
sp
1 1 1
1–
Ik′ Ykss
Vk–
Vk 1–Σ
=
Vk 1–

67
is assumed that some information is already given, such as the sum
of the primary side voltages.
Since (5.9) assumes that is available, BFS-PARS must provide
a reasonable estimate which becomes more accurate at each iteration as
the algorithm moves toward convergence. The sum of the primary side
voltage computed during the previous forward sweep provides such an esti-
mate and is stored as for use during the backward sweep. For the
first iteration, the initial primary voltage is used to compute . For the
typical flat start, with all voltages assumed to be balanced 1 per unit, this
yields .
For a lateral with a class B transformer, the typical backward sweep
function of (5.4) is a function of as well as .
(5.10)
Since, in this case, is 2 x 1, this is still a 3 x 1 function of three vari-
ables.
5.2.1.2 Forward Sweep
During the forward sweep, step 1 of Table 5.4 computes the secondary
voltage from the primary voltage and current. The corresponding update
formula for class B transformers is
(5.11)
from (3.50) in Table 3.10. As explained in Section 3.6.2, “Class B: Grounded
Primary—Ungrounded Secondary”, this formula yields a unique solution
Vk 1–Σ
Vk 1–Σ
Vk 1–Σ
Vk 1–Σ
Vk 1–Σ
0=
Vk 1–Σ
V N
I1 I1
V N
Vk 1–Σ
=
V N
Vk Ykps
Ik Ykpp
Vk 1––( )\=

68
for the secondary voltage only if the sum of the primary side currents
meets the appropriate constraint in (3.45) or (3.46).
Since the primary side current computed during the forward sweep
does not, in general, satisfy the appropriate constraint, must be modi-
fied to meet the constraint before using it in (5.11). The value used in (5.11)
should be as close to the computed as possible while meeting the neces-
sary constraint.
A reasonable approximation to this closest point can be found by add-
ing or subtracting equal values from each element of to satisfy the con-
straint. This is done by computing the constraint mismatch, which is
(5.12)
for type 2 grounded wye to ungrounded wye transformers and
(5.13)
for type 3 grounded wye to delta transformers. A third of this mismatch is
then subtracted from each element of to give a new which satisfies
the relevant constraint and can be used in (5.11) to compute .
(5.14)
The modified update formula, including the adjustment to the primary side
current , can be written in a closed form as
. (5.15)
Vk
IkΣ
Ik
Ik
Ik
IkΣ∆ Ik
Σ=
IkΣ∆ Ik
Σ yk
αk2
------Vk 1–Σ
–=
Ik
Ik
Vk
Ik Ik
IkΣ∆
3---------
11
1
–←
Ik
Vk Ykps
Ik
IkΣ∆
3---------
1
11
– Ykpp
Vk 1––\=
69
This small modification to allows the forward sweep to continue.
The typical forward sweep function of (5.8) is modified to reflect the impor-
tance of the update to which must be stored for the backward sweep.
(5.16)
Again, this is still a three dimensional function of three variables. A three
dimensional mismatch can also be formed by taking the constraint mis-
match along with the current out of the end of the lateral,
which in this case is 2 x 1.
The relatively small adjustment to the primary side current, shown in
(5.14), produces secondary side voltages and currents which are consistent
with the primary side current constraint. During the succeeding backward
sweep, these updated voltages produce a primary side current which more
closely meets the constraint.
5.2.2 Class C Transformers
Transformers of class C have three dimensional voltages and currents
on the secondary side, while these quantities at the primary side are two
dimensional. These transformers are described in detail in Section 3.6.3,
“Class C: Ungrounded Primary—Grounded Secondary”, where the rele-
vant update formulas are given in Table 3.11.
5.2.2.1 Forward Sweep
For class C transformers, step 1 of Table 5.4 during the forward sweep
is similar to the backward sweep for class B transformers. The relevant
update formula is
Ik
Vk 1–Σ
V N
Vk 1–Σ
V N I1
( )
Vk 1–Σ
I1( )=
IkΣ∆ IN 1+ I1( )
70
(5.17)
from (3.61) in Table 3.11. Once again, additional information is needed for
the evaluation of in (5.17). This additional information at the second-
ary side of the transformer must come from the previous backward sweep.
Since the backward sweep is based on a boundary condition of zero end
current, it is current information that is available at the transformer sec-
ondary. As explained in Section 3.6.3, “Class C: Ungrounded Primary—
Grounded Secondary”, this eliminates type 4 ungrounded wye to grounded
wye transformers which have no direct relationship between and .
Consequently, (5.17) is only valid for type 7 delta to grounded wye
transformers and the rest of this discussion of the handling of class C
transformers will be restricted to this type. Since it was computed during
the previous backward sweep, the sum of the secondary side current is
available for the evaluation of (5.17). The typical forward sweep function of
(5.8), for a lateral with a class C transformer, becomes
, (5.18)
where is 3 x 1, is 2 x 1, and is a scalar.
5.2.2.2 Backward Sweep
The backward sweep is similar to the forward sweep for class B trans-
formers. The relevant update formula for step 3 of Table 5.3 is
(5.19)
VkYk
ps
1 1 1
1–Ik Yk
ppVk 1––
βk2
yk------Ik
Σ′=
Vk
IkΣ′ Vk
Σ
IkΣ′
VN
V N
I1
IkΣ′
=
V N I1 IkΣ′
Vk 1– Yksp
Ik′ Ykss
Vk–( )\=

71
from (3.63) in Table 3.11, which requires that the constraint in (3.59) be
satisfied. Since the secondary voltage and current sums computed in the
current backward sweep typically do not meet this constraint, some modifi-
cation is required to proceed with the backward sweep. The forward sweep
requires an accurate value for so it is stored as is and the voltage is
chosen for adjustment.
First, a constraint mismatch is computed.
(5.20)
A third of this mismatch is then subtracted from each element of to
give a new value which satisfies (3.59) and can be used to solve for in
(5.19).
(5.21)
The modified update formula, including the adjustment to the secondary
side voltage , can be written in a closed form as
. (5.22)
This small change in allows the backward sweep to continue. The
typical backward sweep function of (5.4) is modified to reflect the impor-
tance of the update to which must be stored for the forward sweep.
(5.23)
IkΣ′ Vk
VkΣ∆ Vk
Σ βk2
yk
------IkΣ′–=
Vk
Vk 1–
Vk Vk
VkΣ∆
3-----------
1
1
1
–←
Vk
Vk 1– Yksp
Ik′ Ykss
Vk
VkΣ β
k2
yk------Ik
Σ′–
3----------------------------
1
1
1
–
–\=
Vk
IkΣ′
I1
IkΣ′
I1 V N( )
IkΣ
′ VN
( )=
72
Both the function and the independent variable are still 3 x 1. A three
dimensional mismatch is also formed by combining the constraint mis-
match of (5.20) with the two dimensional voltage mismatch at the
beginning of the lateral, .
The relatively small adjustment to the secondary side voltage, shown
in (5.21), produces primary side voltages and currents which are consistent
with the secondary side constraint. During the next forward sweep these
updated currents produce a secondary voltage which more closely meets
the constraint.
5.3 Variations
There are many variations to the general BFS-PARS of Table 5.1 and
Table 5.2. Some are based on current and others on power flow. Some
update voltages during the backward sweep and some do not. Some update
currents or power flows during the forward sweep and some do not. The
naming convention used for the various methods indicates first the vari-
ables updated during the forward sweep, then those updated during the
backward sweep. V is used for voltage, I for current, and S for power flow.
5.3.1 VI-VI-PARS
VI-VI-PARS is the particular variation described in detail in the pre-
ceding sections. It is based on current and it updates both voltages and
currents in both the backward and forward sweeps.
V N
VkΣ∆
V0 V N( ) V0–
73
5.3.2 VS-VS-PARS
VS-VS-PARS modifies the VI-VI-PARS approach, presented in detail
in foregoing sections of this chapter, by using power flow rather than cur-
rent. The approach presented in [3] is based on the same idea. The back-
ward sweep computes the power flow injected into each lateral as a
function of the end voltages by starting with the boundary condition of zero
power flow out of the end of the laterals. The forward sweep starts with the
specified source voltage as a boundary condition and computes the end
voltages as a function of the power injected into each lateral. At each step
of the algorithm, where a current is used in VI-VI-PARS, the corresponding
power flow is used in VS-VS-PARS. The update function used at each bus
during the backward sweep is (2.5) instead of (2.3), and for the forward
sweep it is (2.4) instead of (2.2).
The class B and class C transformers are the only exception to the
change from current to power flow. They are still handled exactly as
described in Section 5.2.1, “Class B Transformers”, and Section 5.2.2,
“Class C Transformers”. Due to the fact that the constraints are con-
straints on current and voltage, power flows are converted to the equiva-
lent currents and these currents are used as described. For instance, for
class B transformers during the forward sweep these currents are adjusted
as in (5.14). Likewise, the power at the secondary of class C transformers
during the backward sweep is converted to the equivalent current and
stored for use during the forward sweep. Hence, (5.18) becomes
(5.24)V N V N
S1
IkΣ′
=
74
and (5.23) becomes
(5.25)
There are two essential differences between VS-VS-PARS and
VI-VI-PARS. One difference has to do with computational efficiency.
VS-VS-PARS typically requires more computation than VI-VI-PARS. Only
certain parts of the calculation, such as the computation of the power and
current injections, respectively, for constant PQ loads are more efficient in
VS-VS-PARS. Even in networks with all constant PQ loads these gains are
more than offset by the increase in computation for other operations such
as voltage drop calculation.
The other essential difference in VS-VS-PARS is that the current
injected into each lateral changes from the time is com-
puted during the backward sweep to the time is used during the for-
ward sweep. In VI-VI-PARS the current is held constant between the
time it is computed in the backward sweep and the time it is used in the
forward sweep. In VS-VS-PARS, it is the power that is held constant
and the current changes depending on the change in the voltage.
Although this does not seem to have a significant effect on convergence, the
sequence of iterates does differ for the two algorithms.
The voltage mismatch at the beginning of each lateral calculated dur-
ing the backward sweep is the same as the voltage mismatch computed by
VI-VI-PARS. The forward sweep yields power mismatches at the end of
each lateral instead of current mismatches.
S1
IkΣ′
S1 V N( )
IkΣ
′ VN
( )=
S1 V0. /( ) ∗ S1
S1
I1
S1
I1
75
5.3.3 V-VI-PARS
This variation is identical to VI-VI-PARS in the backward sweep. The
forward sweep updates only voltages. A method based on a slightly modi-
fied version of this idea was proposed in [18]. Table 5.4 shows the proce-
dure performed at each bus during the forward sweep when both voltages
and currents are updated. In V-VI-PARS, steps 2, 3, and 4 are not per-
formed. The value used for in step 1 is the value computed during the
previous backward sweep. For this method, it is necessary to store this cur-
rent for each bus during the backward sweep. For VI-VI-PARS, it is only
necessary to store the currents injected into each lateral, not the currents
at each bus.
For class B transformers it is still necessary to modify during the
forward sweep according to (5.14) in order to satisfy the appropriate con-
straint in (3.45) or (3.46).
Since the currents are not updated in the forward sweep, the current
mismatch at the end of each lateral is not available as a termination crite-
rion for this method.
5.3.4 V-VS-PARS
V-VS-PARS is the power flow based counterpart to V-VI-PARS. The
backward sweep is identical to that of VS-VS-PARS and the forward sweep
updates only voltages based on the power flow values computed during
the backward sweep.
Since no power flows are updated during the forward sweep, there are
no power mismatches available at the ends of the laterals for use as a ter-
mination criterion.
Ik
Ik
Sk
76
5.3.5 VI-I-PARS
The forward sweep in this variation is identical to that of VI-VI-PARS.
The backward sweep, however, does not update voltages, only currents. In
Table 5.3, which details the procedure at each bus during the backward
sweep, step 3 is skipped. For step 4, is computed using values of voltage
computed in the previous forward sweep.
For class C transformers, it is still necessary to modify the secondary
voltage during the backward sweep according to (5.21) in order to sat-
isfy the constraint in (3.59).
Since no voltages are updated during the backward sweep, the voltage
mismatch at the beginning of each lateral is not available as a termination
criterion for this method.
5.3.6 VS-S-PARS
This is the power flow based version of VI-I-PARS. The forward sweep
is identical to that of VS-VS-PARS, but the backward sweep, like
VI-I-PARS, does not update voltages. Voltage values from the previous for-
ward sweep are used where needed. Once again, no voltage mismatch is
available as a termination criterion for this method.
5.3.7 V-I-PARS
V-I-PARS uses the backward sweep of VI-I-PARS, which updates only
currents, and the forward sweep of V-VI-PARS, which updates only volt-
ages. The methods proposed in [11] and [23] are based on this concept of
simple current summation in the backward sweep and voltage drop calcu-
lation in the forward sweep.
Ik
Vk
77
This method computes neither current nor voltage mismatches, and
the only convergence criterion available, of the three presented in
Section 5.1.3, “Termination Criterion”, is the one based on the difference in
voltage between iterations.
5.3.8 V-S-PARS
V-S-PARS is the power flow based counterpart to V-I-PARS, using the
backward sweep of VS-S-PARS and the forward sweep of V-VS-PARS. This
method uses simple power flow summation for the backward sweep and
voltage drop calculation for the forward sweep, which is also the basis for
the methods proposed in [19] and [20].
5.4 Convergence Analysis
In this section, the convergence of V-I-PARS is considered for a distri-
bution system with no ungrounded sections. Some necessary notation for
the proof is given below in Table 5.5. With this notation, the backward
sweep can be summarized by the following two equations:
(5.26)
(5.27)
The forward sweep can be summarized by the following two equations:
(5.28)
(5.29)
where the initial node voltages at each bus are set to the corresponding
source voltage. Combining these four equations gives an expression for the
Ink( )
In YV nk( )
f Vnk( )
( )+ +=
Ib
k( )A
TI
nk( )
=
Vbk 1+( )
ZIbk( )
=
Vnk 1+( )
Vn0( )
AV bk 1+( )
–=
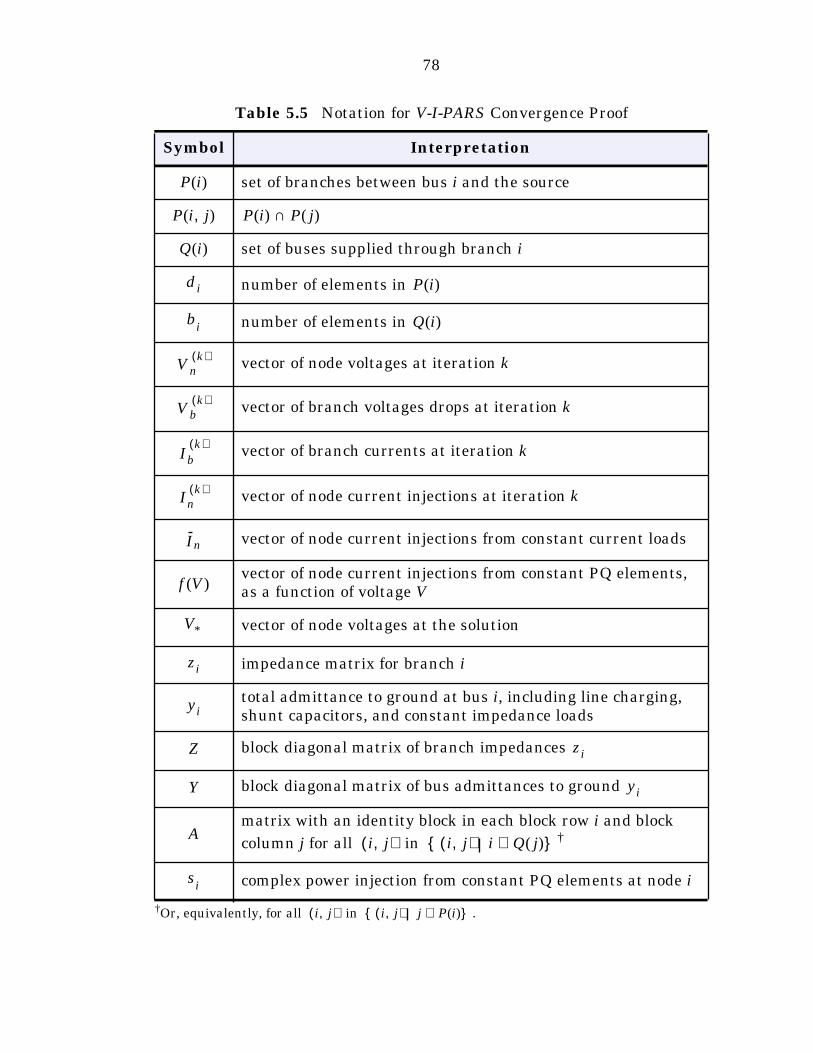
78
†Or, equivalently, for all in .
Table 5.5 Notation for V-I-PARS Convergence Proof
Symbol Interpretation
set of branches between bus i and the source
set of buses supplied through branch i
number of elements in
number of elements in
vector of node voltages at iteration k
vector of branch voltages drops at iteration k
vector of branch currents at iteration k
vector of node current injections at iteration k
vector of node current injections from constant current loads
vector of node current injections from constant PQ elements, as a function of voltage V
vector of node voltages at the solution
impedance matrix for branch i
total admittance to ground at bus i, including line charging, shunt capacitors, and constant impedance loads
Z block diagonal matrix of branch impedances
Y block diagonal matrix of bus admittances to ground
Amatrix with an identity block in each block row i and block
column j for all in †
complex power injection from constant PQ elements at node i
P i( )
P i j,( ) P i( ) P j( )∩
Q i( )
di P i( )
bi Q i( )
Vnk( )
Vbk( )
Ibk( )
Ink( )
In
f V( )
V*
zi
yi
zi
yi
i j,( ) i j,( ) i Q j( )∈{ }
si
i j,( ) i j,( ) j P i( )∈{ }

79
nodal voltages at iteration as a function of the same voltages at
iteration k.
(5.30)
If the node voltage vector at the solution is , the node voltage at
iteration k can be expressed as a sum of the solution plus the error.
(5.31)
Expressing the node voltage vector in this way for both iteration k and
iteration , (5.30) becomes
. (5.32)
Since the solution is a fixed point of (5.30), that is,
, (5.33)
(5.33) can be subtracted from (5.32) to give an expression for the error at
iteration as a function of the error at iteration k.
(5.34)
To prove linear convergence of V-I-PARS, it is sufficient to show that
the ratio of the error magnitudes is smaller than one. Specifically, if it can
be shown that
, (5.35)
then V-I-PARS converges linearly.
First, consider the case with no constant power devices in the net-
work. In this case,
k 1+
Vnk 1+( )
Vn0( )
AZAT
In YV nk( )
f Vnk( )
( )+ +[ ]–=
V*
Vn
k( )V
*∆V
nk( )
+=
k 1+
V* ∆Vnk 1+( )
+ Vn0( )
AZAT
In Y V* ∆Vnk( )
+( ) f V* ∆Vnk( )
+( )+ +[ ]–=
V* Vn0( )
AZAT
In YV* f V*( )+ +[ ]–=
k 1+
∆Vnk 1+( )
AZAT
Y∆Vnk( )
f V* ∆Vnk( )
+( ) f V*( )–+[ ]–=
µAZA
TY∆Vn
k( )f V* ∆Vn
k( )+( ) f V*( )–+[ ]
∆Vnk( )
------------------------------------------------------------------------------------------------------------------- κ 1<≤=

80
. (5.36)
A simple bound on the ratio can be found by taking the product of the
norms of the individual matrices A, Z, , and Y. For each of the p-norms,
where p is 1, 2, or infinity, this product is equal to
. (5.37)
This bound, however, is too loose and is not always satisfied in a typical
distribution system.
A better bound can be found by considering the norms of the matrices
and , since
. (5.38)
The matrix is simply the matrix A with each identity block in block
column j replaced by . Likewise, the matrix is just the matrix
with each identity block in block row j replaced by . It was found that
using the infinity-norm yields a tighter bound than the 1-norm.
(5.39)
It is easy to see that, in a typical system, this is much smaller than
the bound given in (5.37), since not all load magnitudes are equal to the
maximum value and not all of the branch impedances along the highest
impedance path are equal to the maximum branch impedance. In fact, in
all of the available cases based on data from real systems, this quantity
µAZA
TY∆Vn
k( )
∆Vnk( )
-------------------------------------------- AZAT
Y≤=
µ
AT
µ A Z AT
Y bjj
max ( ) djj
max ( ) zjj
max ( ) yjj
max ( )=≤
AZ AT
Y
µ AZAT
Y AZ AT
Y A Z AT
Y≤ ≤ ≤
AZ
zj
AT
Y AT
yj
µ AZ ∞ AT
Y ∞≤ zk ∞k P i( )∈∑
i
max yk ∞k Q i( )∈∑
i
max
zk ∞k P i( )∈∑
i
max yi ∞i
∑
=
=

81
was significantly smaller than one, guaranteeing the linear convergence of
V-I-PARS on these systems.
If constant PQ loads and cogenerators are considered in the network,
then the ratio , as given in (5.35), can be bounded as follows:
, (5.40)
where the first term has just been dealt with. In the second term, is
the nodal current injected by constant power devices at the solution, and
is the injection at iteration k. At a particular node i, the
magnitude of the difference between the two injections is
(5.41)
For real systems, it is reasonable to assume that voltage magnitudes at the
solution and at each iteration4 are larger than 0.7 per unit, implying that
(5.42)
and therefore
. (5.43)
4 Assuming a flat start, the assumption holds for the voltages at the first iteration. Thearguments following show a decrease in the magnitude of the error, indicating that volt-ages during subsequent iterations lie closer to the solution than the initial voltages did.
µ
µ AZAT
YAZA
Tf V* ∆Vn
k( )+( ) f V*( )–[ ]
∆Vnk( )
---------------------------------------------------------------------------------------+≤
f V*
( )
f V*
∆Vn
k( )+( )
fi V* ∆Vnk( )
+( ) fi V*( )–s
i
V*
∆Vn
k( )+[ ]
i
-------------------------------------- ∗ s
i
V*[ ]i
--------------- ∗
–
si ∆Vnk( )[ ] i
V*[ ]i
V* ∆Vnk( )
+[ ] i
------------------------------------------------------
si
V*[ ]i
Vnk( )[ ] i
---------------------------------------- ∆Vnk( )[ ] i .≤
=
=
V*
[ ]i
Vn
k( )[ ]i
12--->
fi V* ∆Vnk( )
+( ) fi V*( )– 2 si ∆Vnk( )[ ] i≤

82
Let S be a diagonal matrix whose ith diagonal element is equal to
.5 Since the elements of A, and therefore of its transpose, are all posi-
tive, the following can be said about the second term of (5.40):
(5.44)
The bound given in (5.39) then becomes
(5.45)
In words, this says that V-I-PARS will converge linearly if the product
of the following two terms is smaller than one. Roughly speaking, the first
term is the total impedance of the highest impedance path and the second
term is the total admittance to ground plus twice the total power injection
from all constant power devices.6 In a typical distribution system, all ,
, and are much smaller than one, yielding a value of which is also
smaller than one. When this condition holds, linear convergence from a flat
start is guaranteed.
5 The matrix S actually has units of admittance since the factor of 2 comes from aninverse squared voltage quantity.
6 The seeming inconsistency in units is due to the hidden voltage units in the factor of 2.
2 si
AZAT
f V* ∆Vnk( )
+( ) f V*( )–[ ]
∆Vnk( )--------------------------------------------------------------------------------------- AZ
AT
f V* ∆Vnk( )
+( ) f V*( )–
∆Vnk( )-------------------------------------------------------------------------
AZA
TS ∆Vn
k( )
∆Vnk( )
-------------------------------------
AZ AT
S
≤
≤
≤
µ AZ ∞ AT
Y ∞ AT
S ∞+( )≤
zk ∞k P i( )∈∑
i
max yi ∞i
∑ 2 si
i
∑ +=
zi
yi si µ
83
5.5 Comments
The backward/forward sweep methods presented in this chapter are
applicable to most radial distribution networks. The one modeling limita-
tion is that BFS-PARS cannot handle type 4 ungrounded wye to grounded
wye connected transformers.
Some general observations with regard to the many variations indi-
cate two things. First, the methods based on current generally require less
computation per iteration than their power flow based counterparts. Sec-
ond, the methods which do not update extra variables such as voltage dur-
ing backward sweep and current/power flow during forward sweep, require
less computation per iteration.
Based on these two observations, V-I-PARS appears to be the most
attractive of the BFS-PARS class of algorithms presented, assuming that
the number of iterations required for convergence is comparable among the
various methods. The comparisons of the algorithms are investigated in
more detail in Chapter 8, “Simulation Results”.
It should also be noted that the amount of work per iteration is pro-
portional to the number of buses. Therefore, if the number of iterations
remains constant, the computational complexity increases linearly with
the size of the network, making BFS-PARS suitable for very large radial
distribution systems.

84
Chapter 6
Fast Decoupled Power Flow Algorithms for Radial Systems (DePARS)
One of the most widely used power flow algorithms throughout the
power industry is the fast decoupled Newton method proposed in 1974 in
[26]. This method exploits some of the numerical properties of the standard
power flow formulation to make simplifying assumptions which allow sig-
nificant savings in computation over the standard Newton method. Unfor-
tunately, this approach is not typically suitable for radial distribution
networks. There are often ill-conditioning problems due to the formulation
and, in addition, the assumptions necessary for the simplifications used in
the standard fast decoupled Newton method are often not valid for these
types of systems. Some work, however, has been done to address these
problems [16; 31; 21].
This chapter explores a class of algorithms which exploits the radial
topological structure to reduce the number of equations and unknowns in
the formulation. These algorithms also take advantage of the special
85
numerical structure of the new formulation to further reduce the computa-
tion required for each iteration, in the spirit of the standard fast decoupled
method for meshed transmission systems. This class of algorithms will be
referred to as fast Decoupled Power flow Algorithms for Radial Systems or
DePARS.
This chapter presents four main variants of DePARS. The first of the
four methods, VI-DePARS, is a generalization of the method proposed in
[32] and will be presented in detail. The other variations, one of which is
an extension of the methods proposed in [12], will then be discussed with
respect to VI-DePARS.
6.1 Detailed Solution Algorithm
The standard fast decoupled methods used in transmission systems
are based on the well-known Newton’s method [28] for solving a non-linear
set of equations. In this case, the non-linear equations being solved are the
power balance equations which specify that, at each bus, the complex
power generated, minus the power absorbed by load, must equal the power
injected into the rest of the network. In a distribution system with one
source bus and many load buses, the traditional power flow formulation
would have six equations for each load bus, balancing the real and reactive
part of the power at each of the three phases.
The traditional fast decoupled method for transmission systems
improves on the standard Newton method, shown in Table 6.1, by making
simplifying approximations which reduce the computational burden for
step 5 and step 6.

86
The DePARS approach is also based on the Newton method. Like the
traditional fast decoupled method, it exploits the numerical structure of
the Jacobian to greatly reduce the computation required by step 5 and
step 6 in Table 6.1. However, DePARS also uses a different formulation of
the power flow equations which exploit the radial topological structure of
the network resulting in a reduced number of equations and unknowns.
Table 6.2 gives a high level view of DePARS and its basic steps.
Steps 5, 6, and 7 from the original Newton method have been simplified
and grouped together into step 2 of DePARS. At the right side of Table 6.2
the details have been kept general enough to cover all four variations of
the method. The first option in each step, however, is the one used by
VI-DePARS, which will be the focus of the remainder of this section.
Table 6.1 Newton’s Method
Solution of by Newton’s Method
1 Choose an initial guess for the solution, .
2 Set .
3 Evaluate .
4 Stop if .
5 Evaluate the Jacobian, .
6 Solve .
7 Let .
8 Let and go to step 3.
F x( ) 0=
x0( )
i 0=
Fi( )
F xi( )
( )=
Fi( )
some tolerance≤
Ji( )
x∂∂F
xi( )
=
Ji( )
si( )
Fi( )
–=
xi 1+( )
xi( )
si( )
+=
i i 1+=
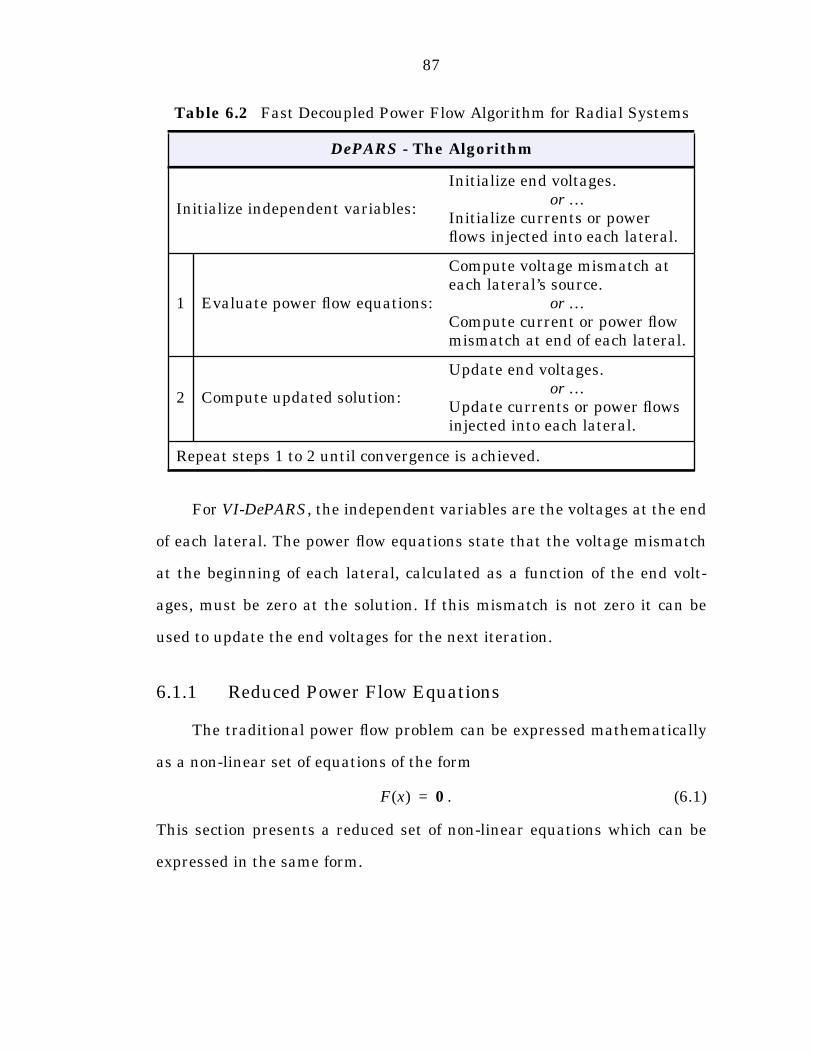
87
For VI-DePARS, the independent variables are the voltages at the end
of each lateral. The power flow equations state that the voltage mismatch
at the beginning of each lateral, calculated as a function of the end volt-
ages, must be zero at the solution. If this mismatch is not zero it can be
used to update the end voltages for the next iteration.
6.1.1 Reduced Power Flow Equations
The traditional power flow problem can be expressed mathematically
as a non-linear set of equations of the form
. (6.1)
This section presents a reduced set of non-linear equations which can be
expressed in the same form.
Table 6.2 Fast Decoupled Power Flow Algorithm for Radial Systems
DePARS - The Algorithm
Initialize independent variables:
Initialize end voltages.or …
Initialize currents or power flows injected into each lateral.
1 Evaluate power flow equations:
Compute voltage mismatch at each lateral’s source.
or …Compute current or power flow mismatch at end of each lateral.
2 Compute updated solution:
Update end voltages.or …
Update currents or power flows injected into each lateral.
Repeat steps 1 to 2 until convergence is achieved.
F x( ) 0=
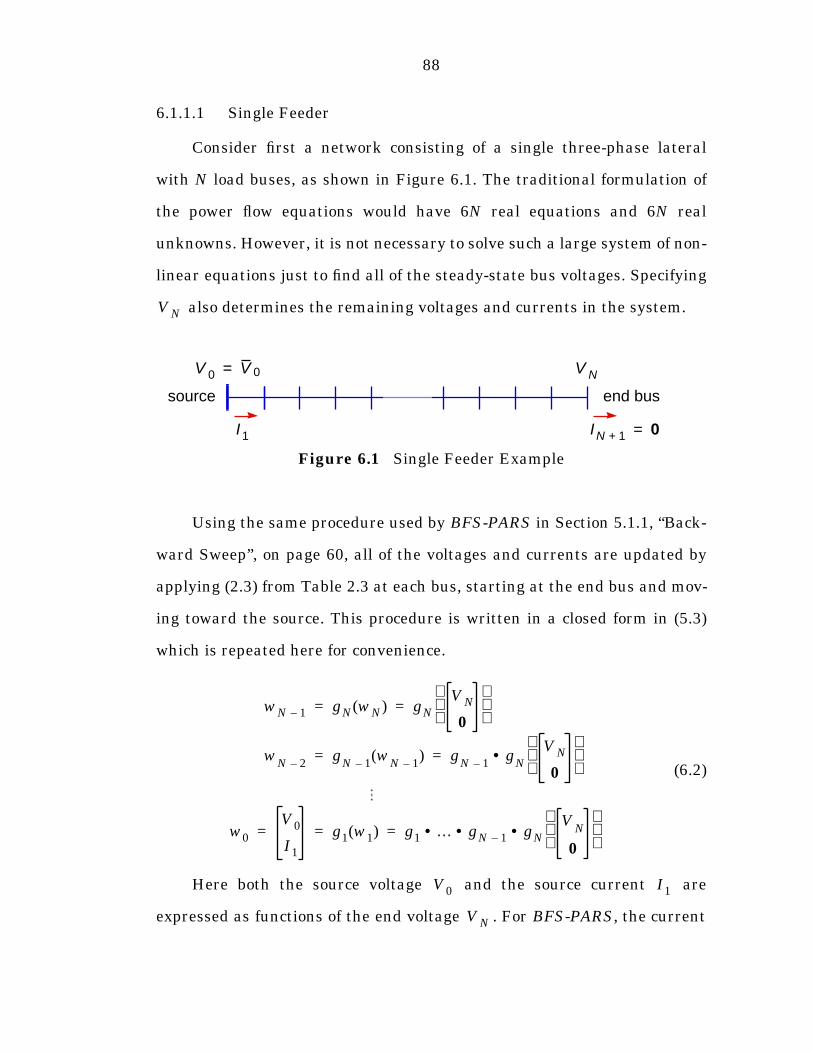
88
6.1.1.1 Single Feeder
Consider first a network consisting of a single three-phase lateral
with N load buses, as shown in Figure 6.1. The traditional formulation of
the power flow equations would have 6N real equations and 6N real
unknowns. However, it is not necessary to solve such a large system of non-
linear equations just to find all of the steady-state bus voltages. Specifying
also determines the remaining voltages and currents in the system.
Using the same procedure used by BFS-PARS in Section 5.1.1, “Back-
ward Sweep”, on page 60, all of the voltages and currents are updated by
applying (2.3) from Table 2.3 at each bus, starting at the end bus and mov-
ing toward the source. This procedure is written in a closed form in (5.3)
which is repeated here for convenience.
(6.2)
Here both the source voltage and the source current are
expressed as functions of the end voltage . For BFS-PARS, the current
Figure 6.1 Single Feeder Example
V N
source
V 0 V 0= V N
I1 IN 1+ 0=
end bus
wN 1– gN wN( ) gNV N
0
= =
wN 2– g
N 1– wN 1–( ) g
N 1– gN
• V N
0
= =
w0
V0
I1
g1 w1( ) g1 …• gN 1– gN••V
N
0
= = =
V0 I1
V N

89
is of primary interest, since it is used during the forward sweep to
update the end voltage . For VI-DePARS, the voltage is of pri-
mary importance, since it is used for mismatch calculation.
At the solution, the difference between the calculated source voltage
and the specified source voltage must be zero. The power flow
equations can therefore be written
. (6.3)
This is a reduced formulation of the power flow problem for a single feeder
which has only three complex equations and three complex unknowns, or
six real equations and six real unknowns. The dimension of this set of non-
linear equations is independent of the number of buses on the lateral and
is a factor of N smaller than the traditional formulation.
6.1.1.2 General Radial Structure
To generalize this formulation to handle an arbitrary radial structure,
first note that the voltage mismatch at the beginning of any lateral can be
computed as a function of the end voltage, as in (6.3), if the currents
injected into each sub-lateral are known. These currents are necessary for
the application of KCL at the branching buses. In a system with L levels of
laterals, the level L laterals have no sub-laterals and can therefore be
updated first. For each lateral and are computed as functions of the
end voltage as follows:
(6.4)
After all level L laterals have been updated, the currents injected into
the sub-laterals of each level lateral are known (the recently cal-
I1 V N( )
V N V0 V N( )
V0 V N( ) V0
F V N( ) V0 V N( ) V0– 0= =
V0 I1
V N
V0
I1
g1 …• gN 1– gN•• V N
0
=
L 1– I1
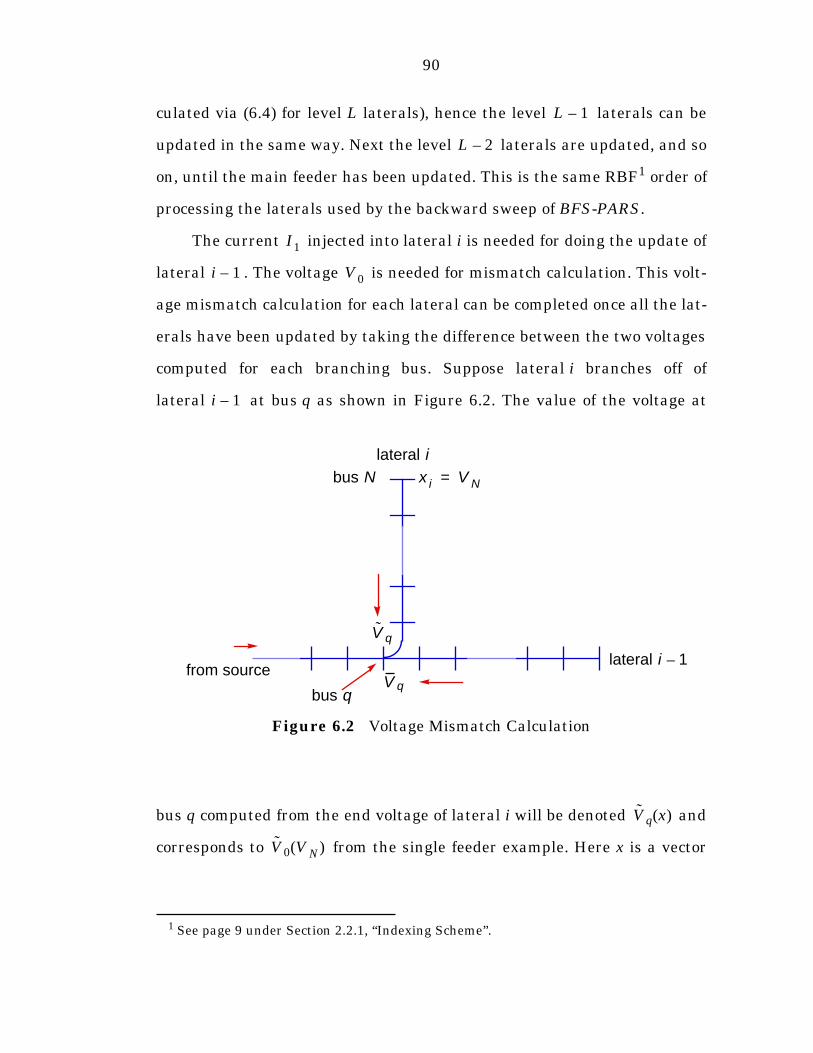
90
culated via (6.4) for level L laterals), hence the level laterals can be
updated in the same way. Next the level laterals are updated, and so
on, until the main feeder has been updated. This is the same RBF1 order of
processing the laterals used by the backward sweep of BFS-PARS.
The current injected into lateral i is needed for doing the update of
lateral . The voltage is needed for mismatch calculation. This volt-
age mismatch calculation for each lateral can be completed once all the lat-
erals have been updated by taking the difference between the two voltages
computed for each branching bus. Suppose lateral i branches off of
lateral at bus q as shown in Figure 6.2. The value of the voltage at
bus q computed from the end voltage of lateral i will be denoted and
corresponds to from the single feeder example. Here x is a vector
1 See page 9 under Section 2.2.1, “Indexing Scheme”.
Figure 6.2 Voltage Mismatch Calculation
L 1–
L 2–
I1
i 1– V0
i 1–
from source
lateral i
bus qV q
V q
lateral i 1–
x i V N=bus N
Vq x( )
V0 V N( )
91
containing the end voltages of all laterals and denotes the end voltage
for lateral i. These are put into x in RBF1 order.
(6.5)
To compute , it is necessary to use x instead of just since is
affected by the currents injected into the sub-laterals of lateral i and these
currents in turn are functions of the end voltages of the corresponding sub-
laterals. In fact, is a function of the voltages of all end buses supplied
through lateral i, not just of its own end voltage.
The other value of corresponds to the specified source voltage
from the single feeder example and will be denoted . This is the volt-
age at bus q, as computed from the end voltage of lateral . Once again,
the variable x is used since is a function of the voltages of all end buses
supplied through the section of lateral beyond bus q, not just of the
end bus of lateral itself.
Subtracting the two voltages and yields an equation sim-
ilar to (6.3) for lateral i starting at bus q, but is replaced by the vector
x of the end voltages of all laterals.
(6.6)
Note that is not actually constant except when i is the main feeder
and q is the source bus, i.e. the last set of equations when in RBF1 order.
The function does not depend on all elements of x, but only on the volt-
ages of end buses supplied through bus q. This relationship will be seen
xi
V N xi
x
x L ML,( )
x l m,( )
x 1 1,( )
V L ML NL M,, ,( )
V l m N l m,, ,( )
V 1 1 N1 1,, ,( )
= =
Vq V N Vq
Vq
Vq V0
Vq x( )
i 1–
Vq
i 1–
i 1–
Vq x( ) Vq x( )
V N
Fi x( ) Vq x( ) Vq x( )– 0= =
Vq x( )
Fi
92
more clearly in Section 6.1.2.1, “Structure of the System Jacobian”, espe-
cially in Figure 6.3 which illustrates the sparsity structure of the system
Jacobian.
Taking (6.6) for each lateral and combining these equations in RBF1
order,
, (6.7)
yields the new reduced power flow equations which can be expressed com-
pactly as
. (6.8)
Assuming real and imaginary parts are separated, for a system with
M laterals, (6.8) is a set of 6M non-linear equations in 6M real unknowns.
This is also assuming that all buses are three-phase; single and two-phase
laterals would reduce these numbers accordingly.
The reduced power flow equations for VI-DePARS are expressed
mathematically by the non-linear set of equations in (6.8). The evaluation
of these equations is performed by traversing each lateral in RBF1 order,
updating voltages and currents via (6.4), then computing the voltage mis-
matches via (6.6).
F
F L ML,( )
F l m,( )
F 1 1,( )
=
F x( ) 0=

93
6.1.1.3 Class B and Class C Transformers
If lateral i, emanating from bus q on lateral , has a class B or
class C transformer as the incoming branch of bus k,2 the corresponding
equations in (6.4), and consequently in (6.6), may take on a slightly differ-
ent form. For a class B transformer entering bus k, the primary voltage
and current are functions of the of (3.49) which includes , the sum
of the voltages at the primary side of the transformer, not just the two
dimensional secondary voltage . This is described in Section 5.2.1.1,
“Backward Sweep”, on page 66. In this case, the independent variable
associated with lateral i is
. (6.9)
The variable x which contains the end voltages of all laterals will also con-
tain for laterals with class B transformers. This allows (6.6) to still
be used in its present form.
For a lateral with a class C transformer, (6.4) remains unchanged,
although the voltage update formula used is the one in (5.22) which
includes the modified secondary voltage. The mismatch function in (6.6) is
a set of two equations in three unknowns. The additional equation
required to solve the problem is obtained by setting to zero the secondary
side constraint mismatch presented in Section 5.2.2.2, “Backward Sweep”,
as (5.20).
2 Due to the implementation explained in Section 2.2.2.2, “Breadth-First Search”, trans-formers always appear as the first branch on a lateral. So, although the more generalnotation is used here, restricted only to one transformer per lateral, in practice and
.
i 1–
k 1=k 1– q=
wk Vk 1–Σ
Vk
xi
xi
V N
Vk 1–Σ
=
Vk 1–Σ

94
(6.10)
This mismatch is a function of x, since the secondary voltage and current
sums are functions of x. In this case, the function of (6.6), used to
compute the mismatch for lateral i, becomes
. (6.11)
With these small changes in the independent variable and the mis-
match computed for laterals with class B and class C transformers, respec-
tively, the compact form of the reduced power flow equations in (6.8) can
still be used.
6.1.2 Update of Independent Variables
The second step of DePARS, after the evaluation of the power flow
equations, is to update the independent variables, that is, the elements of
x. In the case of VI-DePARS, these are the voltages at the ends of the
laterals.3 In the standard Newton method, this involves the following three
steps:
1. Evaluate the Jacobian at the current solution.
2. Solve a linear system of equations to find the update step.
3. Add the update step to the current solution.
The system Jacobian for the reduced set of power flow equations
in (6.8) is
3 For laterals with class B transformers this also includes , the sum of the voltagesat the primary side of the transformer.
VkΣ
∆ x( ) VkΣ β
k2
yk
------IkΣ′– 0= =
Fi x( )
Fi x( )Vq x( ) Vq x( )–
VkΣ
∆ x( )0= =
V N
Vk 1–Σ
J x( )

95
(6.12)
and has a special numerical structure which can be exploited to greatly
reduce the computation involved in finding a good update step.
6.1.2.1 Structure of the System Jacobian
Since the function F consists of the mismatch functions for each
lateral i, and the variable x is made up of the individual associated with
each lateral i, the system Jacobian can be thought of in terms of block ele-
ments associated with a pair of laterals. The block element , in
block row i and block column j, is the sensitivity of the mismatch at
lateral i to changes in the independent variables corresponding to lateral j.
First consider a single feeder system where the mismatch function is
as given in (6.3). The Jacobian for this simple system is just a single
block element and can be expressed using the chain rule and the branch
Jacobians. The branch Jacobian for bus k’s incoming branch is the
Jacobian of the branch update equation in (2.3) from Table 2.3. This
branch update function is
(6.13)
and therefore the branch Jacobian is
. (6.14)
The system Jacobian for this simple single feeder case gives the sensi-
tivity of the calculated source voltage mismatch to variations in the end
J x( )x∂
∂F=
Fi
xi
Fi∂ x j∂⁄
F V N( )
Gk
wk 1– gk wk( )=
Gk wk∂∂gk Vk∂
∂Vk 1–
Ik 1+∂∂Vk 1–
Vk∂∂Ik
Ik 1+∂∂Ik
= =

96
voltage. It can be written, using the chain rule, as the product of the
branch Jacobians from the source bus to the end bus
, (6.15)
where the first term in the product is just the upper half of and the last
term is the left half of .
Extending this to the general radial structure, each block element of
the system Jacobian can be expressed, using the chain rule, as a product of
branch Jacobians along the path between the supplying bus of lateral i and
the end bus of lateral j. If lateral i branches off from its parent lateral at
bus q and the end bus of lateral j is bus n, then changes in at bus n can
only affect the mismatch at bus q if bus n is supplied through bus q. In
other words, if bus q does not lie on the path between bus n and the source,
then . This determines the sparsity structure of the system
Jacobian .
If bus q does lie on the path between bus n and the source, then the
corresponding block element is non-zero and fits into one of the
four categories listed in Table 6.3. In order to simplify the presentation, the
equations given in Table 6.3 are for the case with no class B or class C
transformers present.
The first type of non-zero blocks are those on the block diagonal of the
system Jacobian. These diagonal blocks are formed via (6.16) in a manner
analogous to the single feeder case in (6.15). The second type is the set of
non-zero blocks above the diagonal and is similar to the first except that
refers to the bus following bus q on lateral j, hence it is that is
affected instead of . For non-zero blocks of type 3 and type 4, let bus p
J VN
( )V
N∂∂F
VN
∂∂V0
w1∂∂V0 G
2… G
N 1– V N∂∂gN⋅ ⋅ ⋅ ⋅= = =
G1
GN
x j
Fi
Fi∂ x j∂⁄ 0=
J x( )
Fi∂ x j∂⁄
q 1+ Vq
Vq
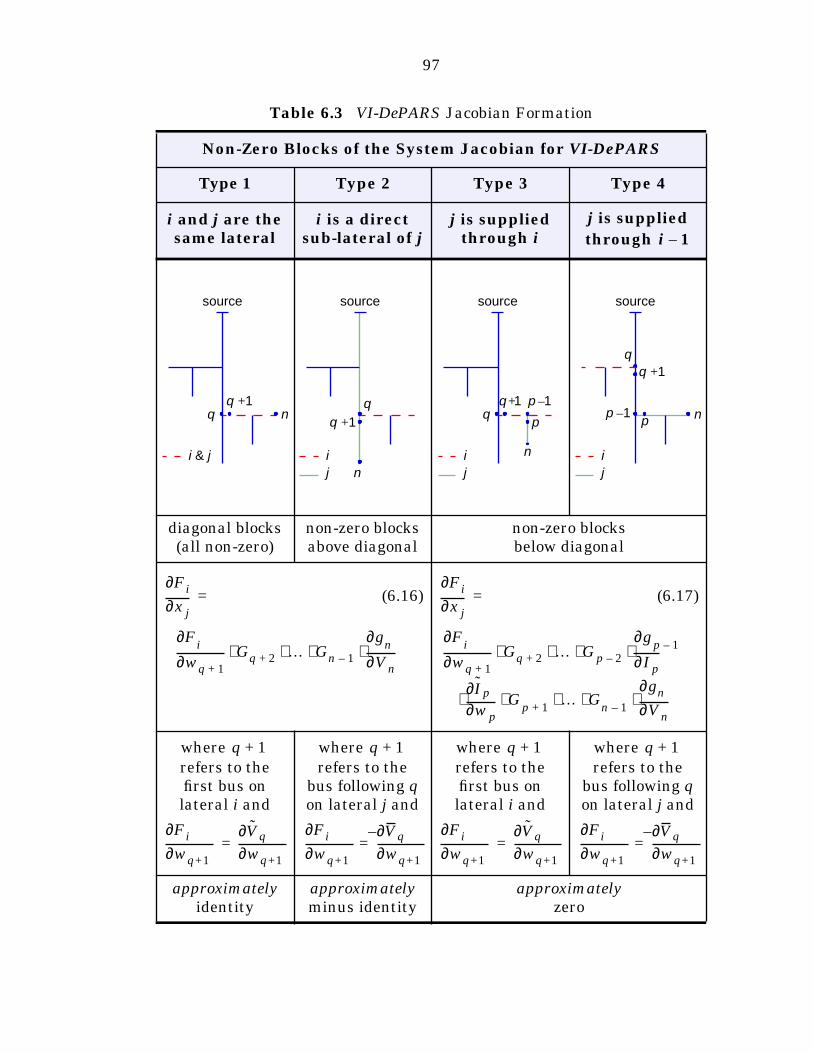
97
Table 6.3 VI-DePARS Jacobian Formation
Non-Zero Blocks of the System Jacobian for VI-DePARS
Type 1 Type 2 Type 3 Type 4
i and j are the same lateral
i is a direct sub-lateral of j
j is supplied through i
j is supplied through
diagonal blocks(all non-zero)
non-zero blocks above diagonal
non-zero blocksbelow diagonal
(6.16) (6.17)
where refers to the first bus on lateral i and
where refers to the
bus following q on lateral j and
where refers to the first bus on lateral i and
where refers to the
bus following q on lateral j and
approximately identity
approximately minus identity
approximatelyzero
i 1–
i & j
source
q nq 1+
q 1+
source
q
n
i
j
source
n
p
p 1–
i
j
qq 1+
source
q
npp 1–
i
j
q 1+
x j∂∂Fi =
wq 1+∂∂F
i Gq 2+ … Gn 1– Vn∂∂g
n⋅ ⋅ ⋅ ⋅
x j∂∂Fi =
wq 1+∂∂F
i Gq 2+ … Gp 2– I p∂∂g
p 1–
wp∂∂I p G
p 1+ … Gn 1– Vn∂
∂gn
⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
q 1+
wq 1+∂∂Fi
wq 1+∂∂Vq=
q 1+
wq 1+∂∂Fi
wq 1+∂∂Vq–
=
q 1+
wq 1+∂∂Fi
wq 1+∂∂Vq=
q 1+
wq 1+∂∂Fi
wq 1+∂∂Vq–
=
98
be the first bus on lateral j. These types are comprised of the non-zero
blocks below the diagonal and require products of branch Jacobians from
more than one lateral. In the examples shown, the path from bus q to bus n
includes only two laterals, but in general there could be more. If, for exam-
ple, this path included four laterals and the first bus on each new lateral
encountered along this path were labelled consecutively as , , and
, then (6.17) would look like the following:
(6.18)
For a general radial distribution network, the structure of the system
Jacobian is determined by the RBF1 order of the equations and variables
and the application of the rules in Table 6.3 for the non-zero blocks. This
Jacobian structure is illustrated in Figure 6.3 for the sample radial net-
work shown in Figure 2.1 on page 10.
As was mentioned earlier, a given does not depend on all elements
of x. The non-zero blocks in block row i correspond to the on which
depends. For lateral i branching off of bus q, block row i will have non-zero
elements in the block columns corresponding to the laterals whose end
buses are supplied through bus q.
p1 p2
p3
x j∂∂Fi
wq 1+∂∂Fi Gq 2+ … Gp1 2– I p1
∂
∂gp1 1–
wp1∂∂I p1 G
p1 1+ … Gp2 2– I p2
∂
∂gp2 1–
wp2
∂∂I p2 Gp2 1+ … Gp3 2– I
p3∂
∂gp3 1–
wp3∂∂I p3 Gp3 1+ … Gn 1– Vn∂
∂gn
⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
=
Fi
x j Fi
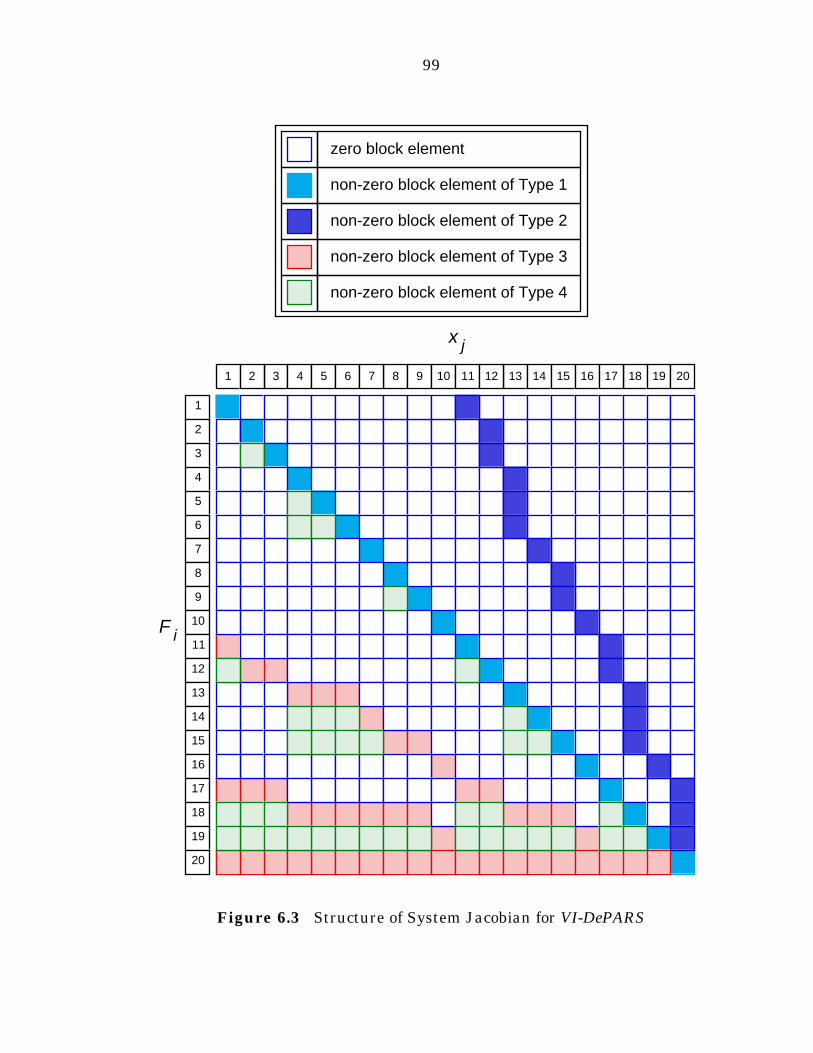
99
Figure 6.3 Structure of System Jacobian for VI-DePARS
1 32 4 5 6 87 9 10 11 1312 14 15 16 1817 19 20
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
non-zero block element of Type 2
non-zero block element of Type 1
zero block element
non-zero block element of Type 3
non-zero block element of Type 4
x j
F i

100
6.1.2.2 Numerical Properties of the System Jacobian
The process of building the system Jacobian requires the application
of (6.16) or (6.17) for each non-zero block as determined by the topology of
the network. Each non-zero block is a product of branch Jacobians which
must be evaluated first. The branch Jacobian of (6.14) relates the sen-
sitivity of voltages and currents at bus to small variations in the volt-
ages and currents at bus k. For a three-phase branch, it is typically a
12 x 12 real matrix.4 Even for a very simple distribution line represented
with the standard π-model, each element of the matrix is a very complex
expression depending not only on the parameters of the line but also on
any load, shunt capacitor, or cogenerator at bus k. For a transformer the
expression can be even more complicated.
To include in a computer program an analytical expression for each of
the 144 terms of each variation of the branch Jacobian is not practical due
to the number of different expressions and their extreme complexity. The
building of the true system Jacobian via products of true branch Jacobians
is therefore not a viable option either. Some numerical approximation is
needed.
In order to determine the numerical structure of the system Jacobian
it is necessary to first examine carefully the numerical properties of the
branch Jacobians for each type of branch. Deriving an analytical expres-
sion for each element and analyzing it to determine which terms can be
neglected and what approximations can be made would also be prohibi-
4 If one or both sides of the branch are in an ungrounded section of the network, thisdimension is reduced to 10 x 10 or 8 x 8, respectively. Note that it is necessary to separateeach complex variable into two real variables in order to differentiate to find the truebranch Jacobian.
Gk
k 1–

101
tively tedious. However, some reasonable approximations can be made by
examining the relative magnitudes of certain quantities when expressed in
per unit.
For the incoming branch of bus k, the branch Jacobian contains
the sensitivities of and to small changes in and . Sup-
pose this branch is a switch, modeled as a zero impedance connection. In
this case, small changes in cause identical changes in and small
changes in cause identical changes in . In other words, the diago-
nal blocks of are identity blocks. The off-diagonal block based on the
sensitivity of to is a zero block since changes in have no
effect on the voltage . The other off-diagonal block is nearly zero as
well, under the assumption that the admittances and power injections of
loads, shunt capacitors, and cogenerators are small relative to voltage
magnitudes when expressed in per unit. From the KCL equation in (5.2) it
can be seen that does have a small effect on the currents injected by
loads, shunt capacitors, and cogenerators. However, assuming the admit-
tance or power parameters are small with respect to voltage, the sensitiv-
ity of , and therefore of also, to can be neglected. This is
equivalent to approximating loads, shunt capacitors, and cogenerators by
their corresponding current injections. For a switch, then, the branch Jaco-
bian can be approximated by the appropriately sized identity matrix.5
Using I to denote an identity block
. (6.19)
5 When using this approximation, it is not necessary to split up complex variables intotwo real variables. Hence, for a three-phase branch in a grounded section of the network
is a 6 x 6 identity matrix.
Gk
Vk 1– Ik Vk Ik 1+
Vk Vk 1–
Ik 1+ Ik
Gk
Vk 1– Ik 1+ Ik 1+
Vk 1–
Vk
Ik′ Ik Vk
Gk
Gk
GkI 0
0 I≈
102
If bus k’s incoming branch is a distribution line modeled as described
in Section 3.4, “Distribution Line Model”, then the numerical properties of
(3.19) and (3.20) from Table 3.6 must be examined in order to derive an
approximation for . For practical distribution lines the elements of the
line impedance matrix and the line charging admittance matrix are
typically small with respect to voltage magnitudes when expressed in per
unit. When differentiating, under this assumption, the last term of (3.19)
and the first term of (3.20) can be neglected. This is equivalent to approxi-
mating the distribution line as a zero impedance branch with no charging.
As with the switch, this implies that the branch Jacobian can be
approximated by the appropriately sized identity matrix.5
In a system with only lines and switches but no transformers, each
branch Jacobian can be approximated by an identity matrix. Voltages and
currents are essentially decoupled from one another. It is important to note
that these approximations are only for simplifying the Jacobian used to
compute the update step in Newton’s method. They have no effect on the
final solution, which is still based on the full models described in
Chapter 3, “Detailed Component Models”.
The diagonal blocks of the system Jacobian are under type 1 in
Table 6.3 and are formed via (6.16). Using the identity approximations for
the branch Jacobians yields an identity block in the system Jacobian as
well.
(6.20)
Gk
Zk Yk
Gk
x j∂∂Fi
I 0I 0
0 I… I 0
0 I
I
0⋅ ⋅ ⋅ ⋅≈
I=

103
Type 2 non-zero blocks, those above the diagonal, are formed by the
same equation except that the first term has a negative sign, resulting in a
negative identity block in the system Jacobian.
(6.21)
Using the identity approximation to the branch Jacobian in (6.17) for
type 3 non-zero blocks yields
(6.22)
Here the result is a zero block in the system Jacobian. This is due to the
fact that the only coupling between the voltages involved is through the
current , but the approximation decouples voltages and currents. The
only difference for type 4 non-zero blocks is a leading negative sign. These
blocks can therefore also be approximated by zero. The last row of
Table 6.3 summarizes these approximations.
6.1.2.3 Transformers
Building non-zero blocks of the system Jacobian which involve trans-
formers is somewhat more complicated. First, note that there can be no
transformers on the relevant part of lateral j for a type 2 non-zero block, so
the approximations for these blocks are never affected by transformers.
x j∂∂Fi
I 0– I 0
0 I… I 0
0 I
I
0⋅ ⋅ ⋅ ⋅≈
I–=
x j∂∂Fi
I 0I 0
0 I… I 0
0 I
0
I0 I
I 0
0 I… I 0
0 I
I
0⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅ ⋅≈
I 00
I0 I
I
0⋅ ⋅ ⋅
0
=
=
I p

104
Second, note that if a transformer is approximated by its ideal equiva-
lent with no leakage admittance, then currents are completely decoupled
from voltages and vice versa. Changes in secondary voltage have no effect
on primary current and changes in secondary current have no effect on pri-
mary voltage. This means that the off-diagonal blocks of can be approx-
imated by a zero block for a transformer.
Given that a transformer always appears as the first branch on the
lateral,6 the lower right block of is not even used in the formation of the
system Jacobian for type 1 blocks since the first term of (6.16) includes
only the left half of . The same is true about the first term of (6.17) for
type 3 and type 4 blocks. In fact, for a network with a transformer entering
bus p, the identity approximations for the lines and switches disappear
and (6.17) becomes
(6.23)
Even without knowing the value of these sub-diagonal blocks
can still be approximated by zero. This means that it is not necessary to
evaluate the lower right block of for a transformer since it is never used
in the formation of the approximated system Jacobian.
The only non-zero blocks of the approximated system Jacobian
affected by transformers are the type 1 diagonal blocks. Suppose bus k7 is
the first bus on lateral i and its incoming branch is a transformer. The
6 See Section 2.2.2.2, “Breadth-First Search”.7 Here k is also equal to in the figure for type 1 blocks in Table 6.3.
Gk
Gk
Gk
x j∂∂Fi
I 00
I0
I p 1+∂∂I p
I
0⋅ ⋅ ⋅≈
0 .=
I p∂ I p 1+∂⁄
Gk
q 1+

105
diagonal element in block row i can be approximated by the upper left
block element of .
(6.24)
This relationship between secondary and primary voltages, however,
depends on the connection type. For class A transformers, this partial
derivative is computed from (3.39) of Table 3.9 and yields
. (6.25)
For class B transformers, is a function of as well as . Differen-
tiating (3.52) of Table 3.10 gives the relevant expression:
(6.26)
For class C transformers, the corresponding block diagonal element of the
approximated Jacobian consists of the partial derivatives of (5.22) and
(6.10).
(6.27)
Table 6.4 shows, for each transformer type, the constant matrix
depending only on and which results from the evaluation of (6.25),
Gk
x j∂∂Fi
Vk∂∂Vk 1–
0I 0
0 I… I 0
0 I
I
0⋅ ⋅ ⋅ ⋅≈
Vk∂∂Vk 1–=
xi
∂∂Fi
Vk
∂∂Vk 1–≈ Yk
sp( )
1–Yk
ss–=
gk Vk 1–Σ
Vk
xi∂∂Fi
Vk∂∂Vk 1–
Vk 1–Σ
∂
∂Vk 1–
≈Yk
sp
1 1 1
1– 0Yk
ss–
0
0 0 1
=
xi
∂∂Fi Vk∂
∂Vk 1–
Vk∂∂Vk
Σ
≈Yk
spYk
ss 13---
2 1– 1–
1– 2 1–1– 1– 2
⋅
\–
1 1 1
=
αk βk
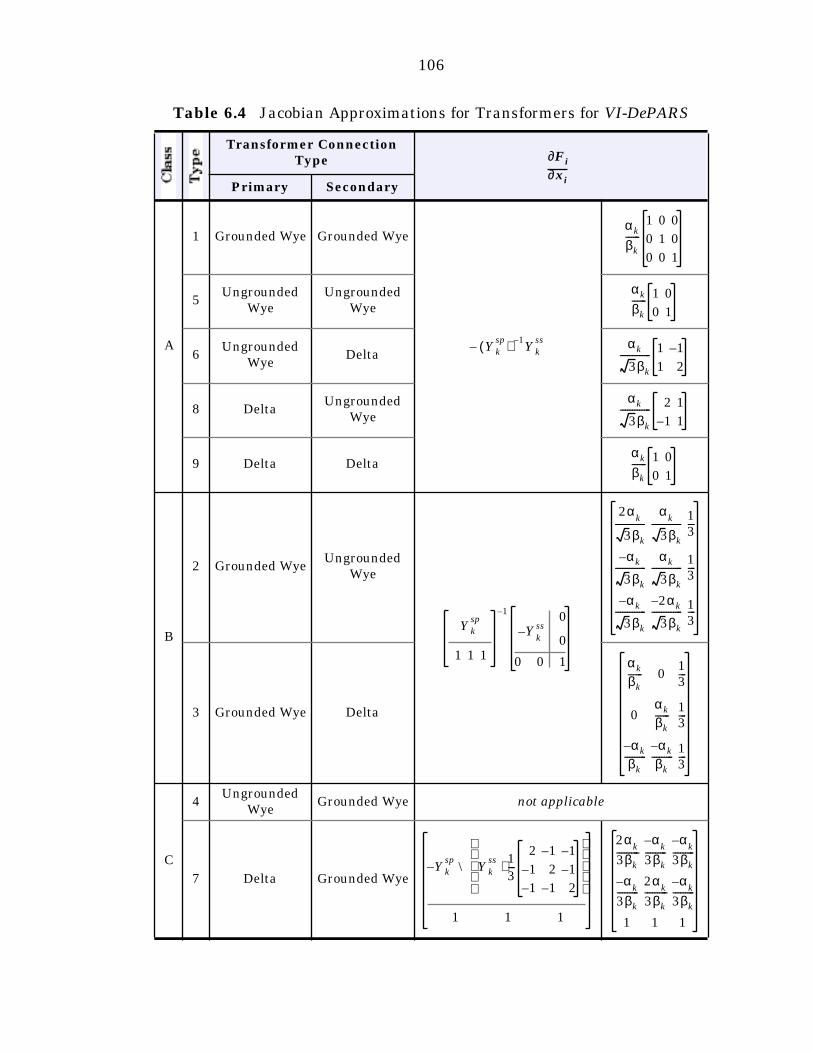
106
Table 6.4 Jacobian Approximations for Transformers for VI-DePARS
Transformer Connection Type
Primary Secondary
A
1 Grounded Wye Grounded Wye
5Ungrounded
WyeUngrounded
Wye
6Ungrounded
WyeDelta
8 DeltaUngrounded
Wye
9 Delta Delta
B
2 Grounded WyeUngrounded
Wye
3 Grounded Wye Delta
C
4Ungrounded
WyeGrounded Wye not applicable
7 Delta Grounded Wye
xi∂∂Fi
Yksp( ) 1–
Ykss
–
αk
βk
------1 0 0
0 1 0
0 0 1
αk
βk
------ 1 0
0 1
αk
3βk
------------- 1 1–
1 2
αk
3βk
------------- 2 1
1– 1
αk
βk
------ 1 0
0 1
Yksp
1 1 1
1– 0Y
kss–
0
0 0 1
2αk
3βk
-------------α
k
3βk
-------------13---
αk–
3βk
-------------αk
3βk
-------------13---
αk–
3βk
-------------2αk–
3βk
------------- 13---
αk
βk------ 0
13---
0αk
βk------
13---
αk–
βk---------
αk–
βk---------
13---
Yksp
Ykss 1
3---
2 1– 1–
1– 2 1–
1– 1– 2
⋅
\–
1 1 1
2αk
3βk----------
αk
–
3βk---------
αk
–
3βk---------
αk
–
3βk
---------2α
k
3βk
----------α
k–
3βk
---------
1 1 1
107
(6.26), and (6.27). The appropriate constant matrix from the table is used
to replace the identity block on the diagonal of the approximated system
Jacobian for a lateral with a transformer.
6.1.2.4 Solving for the Update
The approximation to the system Jacobian is a block upper-triangular
matrix as shown in Figure 6.4 for the sample radial network of Figure 2.1
on page 10. Neglecting the near zero type 3 and type 4 blocks below the
diagonal is essentially saying that the mismatch for lateral i depends only
on the end voltages of laterals i and .
Typically, each iteration i of the Newton method requires the evalua-
tion of the system Jacobian and its factorization for the solution of
the update step from
. (6.28)
However, when using the approximation to J described above, the matrix
is constant and need not be reevaluated at each iteration. Furthermore,
due to its block upper-triangular structure, it is not necessary to factor the
matrix. Instead, (6.28) can be solved very efficiently for via a simple
block backward substitution.
6.1.3 Termination Criterion
The power flow equations are evaluated to determine the mis-
match for each iteration of DePARS. This mismatch is used to update the
value of x for the next iteration. These two steps are repeated until conver-
gence is achieved. Once the norm of the mismatch becomes smaller
than some tolerance it can be said that the algorithm has converged.
i 1–
J xi( )
( )
si( )
J xi( )
( )si( )
F xi( )
( )–=
si( )
F x( )
F x( )
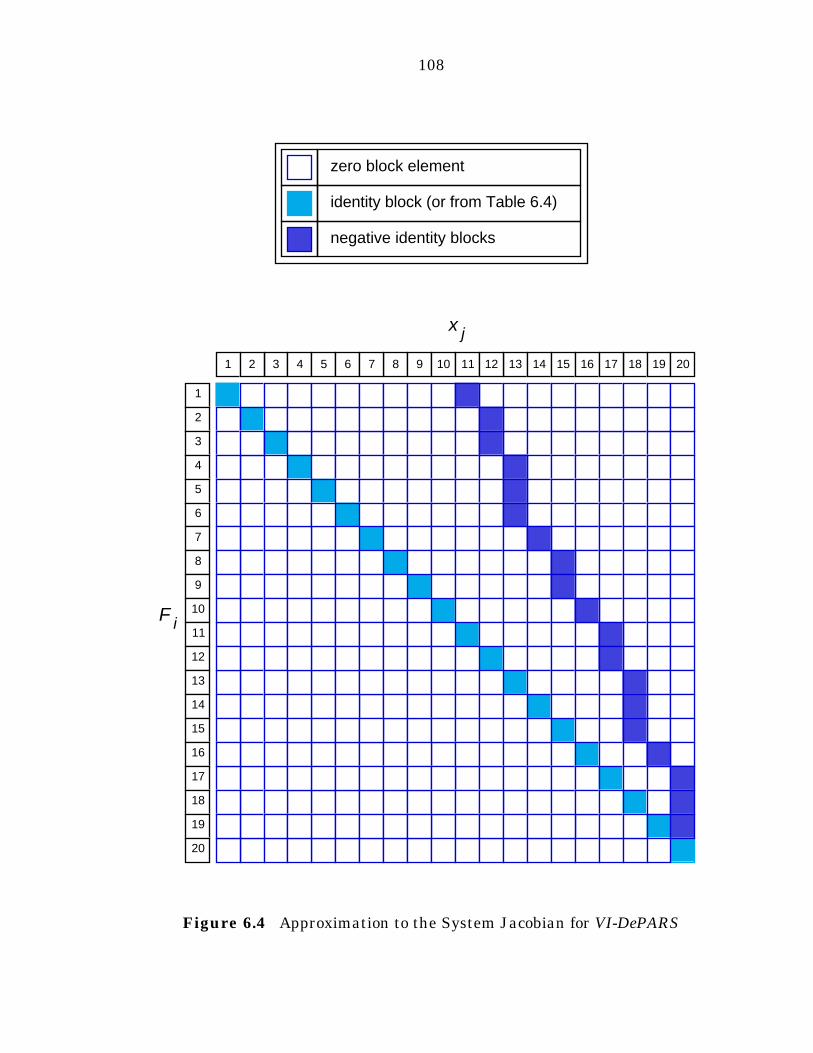
108
Figure 6.4 Approximation to the System Jacobian for VI-DePARS
1 32 4 5 6 87 9 10 11 1312 14 15 16 1817 19 20
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
negative identity blocks
identity block (or from Table 6.4)
zero block element
x j
F i

109
It is also possible to use the termination criterion used for the net-
work reduction methods of Chapter 4. This approach requires that the
norm of the difference in bus voltages between iterations be smaller than a
given tolerance.
6.2 Implementation
In many respects DePARS is very similar to the backward/forward
sweep methods of Chapter 5. The function evaluation for VI-DePARS in
the implementation is, in fact, the same routine as the one used for back-
ward sweep in VI-VI-PARS and V-VI-PARS. In the fast decoupled method,
the end voltages are updated directly via an approximate Newton step as
opposed to the complete forward sweep used in the backward/forward
sweep methods.
Because of the simple structure of the approximated Jacobian, it is
not even necessary to explicitly form the matrix. Once the mismatches
have been calculated, the update step for each lateral can be computed
directly as
(6.29)
for laterals without transformers, and
(6.30)
for laterals with transformers. Here refers to the update step for
lateral , the parent of lateral i. The calculation of the update steps
must therefore proceed in BF8 order, starting with the main feeder. The
8 See page 11 under Section 2.2.1, “Indexing Scheme”.
Fi
si si 1– Fi–=
si xi∂∂F
i
1–
si 1– Fi–( )=
si 1–
i 1–
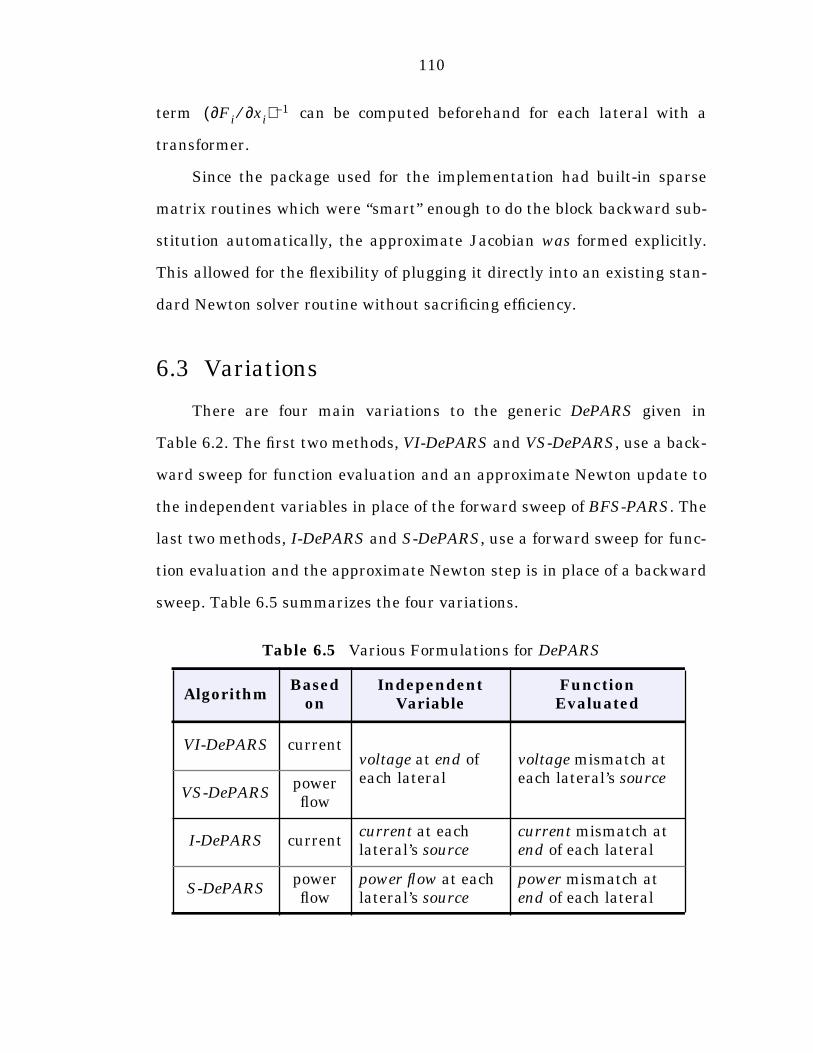
110
term can be computed beforehand for each lateral with a
transformer.
Since the package used for the implementation had built-in sparse
matrix routines which were “smart” enough to do the block backward sub-
stitution automatically, the approximate Jacobian was formed explicitly.
This allowed for the flexibility of plugging it directly into an existing stan-
dard Newton solver routine without sacrificing efficiency.
6.3 Variations
There are four main variations to the generic DePARS given in
Table 6.2. The first two methods, VI-DePARS and VS-DePARS, use a back-
ward sweep for function evaluation and an approximate Newton update to
the independent variables in place of the forward sweep of BFS-PARS. The
last two methods, I-DePARS and S-DePARS, use a forward sweep for func-
tion evaluation and the approximate Newton step is in place of a backward
sweep. Table 6.5 summarizes the four variations.
Table 6.5 Various Formulations for DePARS
AlgorithmBased
onIndependent
VariableFunction Evaluated
VI-DePARS currentvoltage at end of each lateral
voltage mismatch at each lateral’s source
VS-DePARSpower flow
I-DePARS currentcurrent at each lateral’s source
current mismatch at end of each lateral
S-DePARSpower flow
power flow at each lateral’s source
power mismatch at end of each lateral
Fi∂ xi∂⁄( ) 1–
111
6.3.1 VI-DePARS
VI-DePARS is the variation presented in detail in Section 6.1,
“Detailed Solution Algorithm”. It computes voltage mismatches at the
beginning of each lateral as a function of the end voltages and is based on
current as opposed to power flow. This is the algorithm presented in [32]
for networks which have only type 1 grounded wye to grounded wye trans-
formers.
The approach proposed in [17] is based on a similar idea. For a system
consisting of a single feeder, it is equivalent to VI-DePARS, using (6.29) to
update the end voltages directly from the voltage mismatch at the source.
However, in the extension to a general radial structure, instead of updat-
ing the end voltage of all laterals at each iteration, the equations associ-
ated with each lateral are solved one by one to completion. Once
convergence is achieved for all level l laterals, the level are solved.
When all the laterals have been solved the process is repeated. This nested
looping, of course, is inefficient and, fortunately, not necessary, as has been
shown.
6.3.2 VS-DePARS
VS-DePARS is the power flow based counterpart to VI-DePARS. It
uses the same independent variables and the mismatches computed are
still the voltage mismatches at the beginning of each lateral. The function
evaluation, however, is based on the backward sweep used by VS-VS-PARS
described in Section 5.3.2.9 Many of the differences between VI-VI-PARS
9 This backward sweep is also used by V-VS-PARS of Section 5.3.4.
l 1–
112
and VS-VS-PARS described in this section are also relevant to the differ-
ences between VI-DePARS and VS-DePARS.
Since this method computes the same mismatch as a function of the
same variables, the same approximate Jacobian can be used. An extensive
analysis of the branch Jacobians, now based on from (2.5), lead to the
same approximations yielding the same approximate system Jacobian.
6.3.3 I-DePARS
In the single feeder example of Figure 6.1, there are two boundary
conditions: the source voltage is a specified constant and the end current is
zero. The first two variations of DePARS are based on using the boundary
condition at the end of the lateral to compute backward toward the source,
obtaining a voltage mismatch at the source as a function of the end volt-
age. I-DePARS takes the opposite approach. The source voltage boundary
condition is used to calculate in the forward direction to obtain a current
mismatch at the end of the lateral as a function of the current injected at
the source.
In this case, the independent variables are the currents injected into
the beginning of each lateral. The function evaluation is equivalent to a
forward sweep and the approximate Newton update of the independent
variables is in place of a backward sweep. In fact, the routine used to do
the function evaluation is the same as the one used for the forward sweep
of VI-VI-PARS and VI-I-PARS, which is described in detail in Section 5.1.2,
“Forward Sweep”.
hk

113
6.3.3.1 Reduced Power Flow Equations
For a single lateral, the branch update function of (2.2) is applied
repeatedly starting from the source and moving toward the end of the lat-
eral as shown in (6.31).
(6.31)
The lower half of the composite function is used as the
mismatch function for the lateral.
(6.32)
To extend this to a general radial structure, note that the voltage
must be known in order to apply (6.31). This implies that lateral must
be evaluated before lateral i. The BF8 order used by the standard forward
sweep, described in Section 5.1.2, “Forward Sweep”, meets this require-
ment. Suppose bus k is the first bus on lateral i as shown in Figure 6.5.
The current at the end of lateral i is computed as a function of
and , and will be written , where x is the vector containing the
currents injected into all laterals and denotes the current injected
into lateral i. These are put into x in RBF1 order.
f k
w1 f 1 w0( ) f 1V0
I1
= =
w2 f 2 w1( ) f 2 f 1• V0
I1
= =
wN
V N
IN 1+
f N wN 1–( ) f N …• f 2 f 1•• V0
I1
= = =
f N …• f 2 f 1••
F I1( ) IN 1+ I1( ) 0= =
V0
i 1–
IN 1+ Ik
Vq IN 1+ x( )
xi Ik
xi
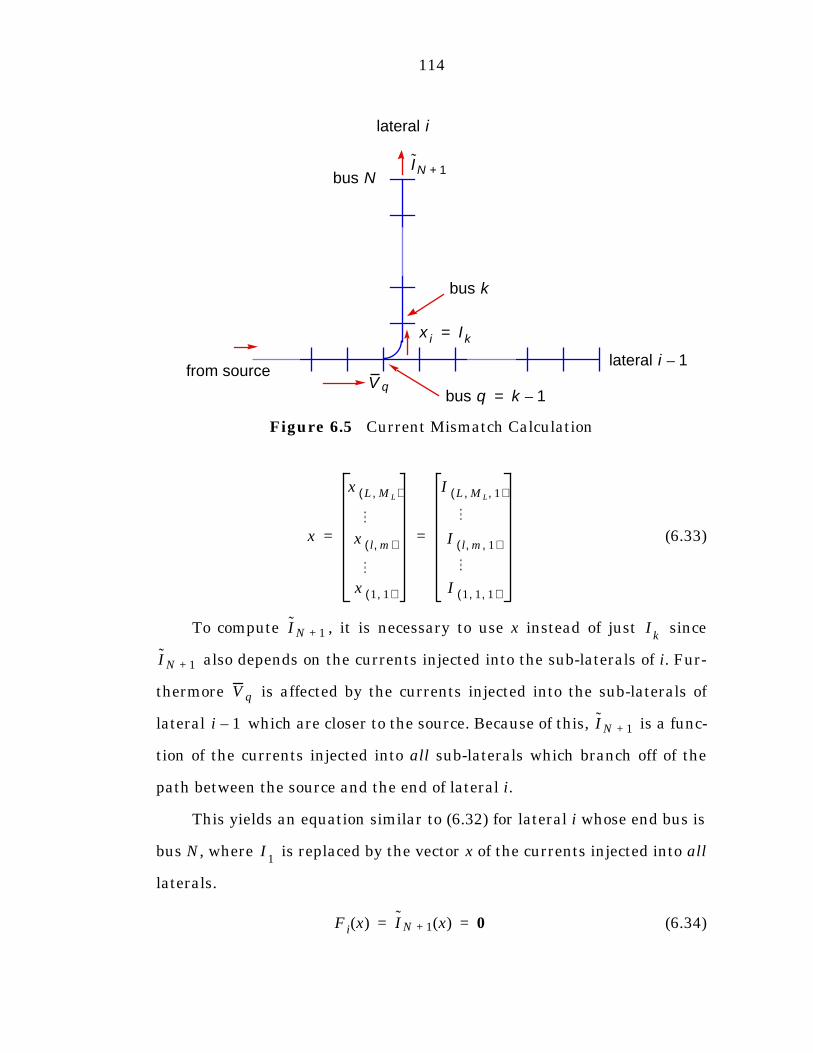
114
(6.33)
To compute , it is necessary to use x instead of just since
also depends on the currents injected into the sub-laterals of i. Fur-
thermore is affected by the currents injected into the sub-laterals of
lateral which are closer to the source. Because of this, is a func-
tion of the currents injected into all sub-laterals which branch off of the
path between the source and the end of lateral i.
This yields an equation similar to (6.32) for lateral i whose end bus is
bus N, where is replaced by the vector x of the currents injected into all
laterals.
(6.34)
Figure 6.5 Current Mismatch Calculation
from source
lateral i
bus k
V q
lateral i 1–
x i Ik=
bus NIN 1+
bus q k 1–=
x
x L ML,( )
x l m,( )
x 1 1,( )
I L ML 1, ,( )
I l m 1, ,( )
I 1 1 1, ,( )
= =
IN 1+ Ik
IN 1+
Vq
i 1– IN 1+
I1
Fi x( ) IN 1+ x( ) 0= =
115
Taking (6.34) for each lateral and combining these equations in RBF1 order
as in (6.7) yields the new reduced power flow equations which can be still
be expressed compactly as
. (6.35)
Note that the implementation of (6.35) in this case requires that the later-
als be evaluated in BF8 order, not in the order they appear in F and x.10
As with VI-DePARS, a class B or class C transformer entering bus k
causes the variables or mismatch functions for lateral i to change slightly
from the standard and . For a lateral with a class B transformer,
the voltage update formula used is the one in (5.15) which includes the
modified primary current. The mismatch function in (6.34) is a set of two
equations in three unknowns. The additional equation required to solve
the problem is obtained by setting to zero the primary side constraint mis-
match presented in Section 5.2.1.2, “Forward Sweep”, as (5.12) or (5.13).
For type 2 grounded wye to ungrounded wye transformers, (5.12) gives
(6.36)
and for type 3 grounded wye to delta transformers, (5.13) gives
. (6.37)
This mismatch is a function of x since the primary voltage and current
sums are functions of x. In this case, the mismatch function becomes
. (6.38)
10 The ordering of F and x need only satisfy the constraint that they be sorted by laterallevel. RBF order was chosen primarily for consistency with VI-DePARS.
F x( ) 0=
Ik IN 1+
IkΣ
∆ x( ) IkΣ
0= =
IkΣ
∆ x( ) IkΣ yk
αk2
------Vk 1–Σ
– 0= =
Fi x( )
Fi
x( )IN 1+ x( )
IkΣ
∆ x( )
0= =
116
For a class C transformer entering bus k, the secondary voltage and
current are functions of the of (3.60) which includes , the sum of
the currents at the secondary side of the transformer, not just the two
dimensional primary current . This is described in Section 5.2.2.1, “For-
ward Sweep”, on page 69. In this case, the independent variable associ-
ated with lateral i is
. (6.39)
The variable x, which contains the currents injected into all laterals, will
also contain for laterals with class C transformers. This allows (6.34) to
be used in its present form.
With these small changes in the mismatch and the independent vari-
able for laterals with class B and class C transformers, respectively, the
compact form of the reduced power flow equations in (6.35) can still be
used.
6.3.3.2 Update of the Independent Variables
As with the formulation for VI-DePARS, the elements of the system
Jacobian can be formed via the chain rule as the product of branch Jacobi-
ans. The branch Jacobian for I-DePARS is the Jacobian of the branch
update function in (2.2) from Table 2.3. This branch update function is
(6.40)
and the branch Jacobian is therefore
wk 1– IkΣ′
Ik
xi
xi
Ik
IkΣ′
=
IkΣ′
Gk
wk f k wk 1–( )=
117
. (6.41)
Suppose lateral j branches off of its parent at bus q and lateral i’s end
bus is bus n.11 If bus q does not lie on the path from the source to bus n,
then the corresponding block element of the system Jacobian is a
zero block. If bus q does lie on the path from the source to bus n, then the
corresponding block is non-zero. Table 6.6 summarizes the formation of the
non-zero blocks of the system Jacobian. In order to simplify the presenta-
tion, the equations given in Table 6.6 are for the case with no class B or
class C transformers present. This leads to the structure shown in
Figure 6.6 for the sample radial network shown in Figure 2.1 on page 10.
This structure is the transpose of the Jacobian structure for VI-DePARS
shown in Figure 6.3.
For lines and switches, the branch Jacobian in (6.41) can once again
be approximated by an identity matrix, under the same assumptions about
the relative magnitudes of per unit circuit parameters and per unit volt-
ages. Following a development similar to that of Section 6.1.2.2, “Numeri-
cal Properties of the System Jacobian”, and Section 6.1.2.3,
“Transformers”, leads to similar approximations. The type 3 and type 4
blocks, now above the diagonal, are approximated by zero, the type 2
blocks below the diagonal are approximated by negative identity, and the
diagonal type 1 blocks, except when dealing with transformers, are approx-
imated by identity blocks.
11 Here i and j are exchanged from the scenario used in Table 6.3.
Gk wk 1–∂∂f k Vk 1–∂
∂Vk
Ik∂∂Vk
Vk 1–∂∂Ik 1+
Ik∂∂Ik 1+
= =
Fi
∂ xj
∂⁄
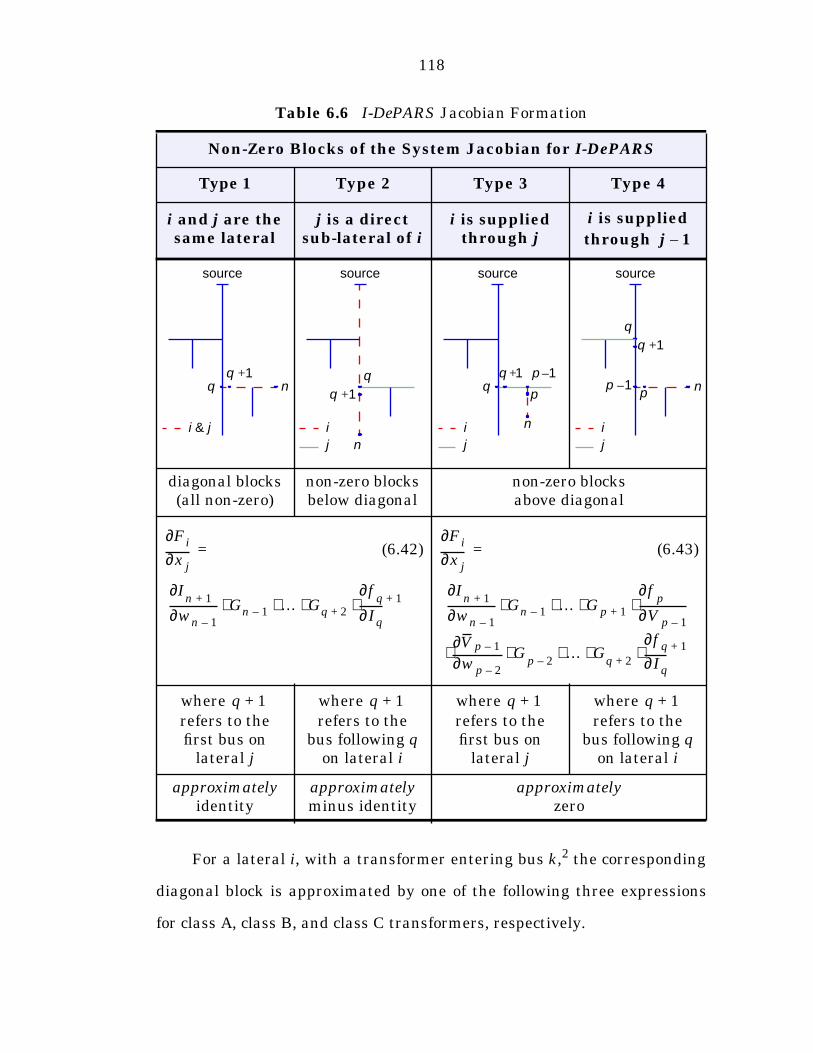
118
For a lateral i, with a transformer entering bus k,2 the corresponding
diagonal block is approximated by one of the following three expressions
for class A, class B, and class C transformers, respectively.
Table 6.6 I-DePARS Jacobian Formation
Non-Zero Blocks of the System Jacobian for I-DePARS
Type 1 Type 2 Type 3 Type 4
i and j are the same lateral
j is a direct sub-lateral of i
i is supplied through j
i is supplied through
diagonal blocks(all non-zero)
non-zero blocks below diagonal
non-zero blocksabove diagonal
(6.42) (6.43)
where refers to the first bus on
lateral j
where refers to the
bus following q on lateral i
where refers to the first bus on
lateral j
where refers to the
bus following q on lateral i
approximately identity
approximately minus identity
approximatelyzero
j 1–
i & j
source
q nq 1+
q 1+
source
q
n
i
j
source
n
p
p 1–
i
j
qq 1+
source
q
npp 1–
i
j
q 1+
x j∂∂Fi =
wn 1–∂∂I
n 1+ Gn 1– … Gq 2+ Iq∂∂f
q 1+⋅ ⋅ ⋅ ⋅
x j∂∂Fi =
wn 1–∂∂I
n 1+ Gn 1– … Gp 1+ V p 1–∂∂f
p
wp 2–∂∂V p 1– G
p 2– … Gq 2+ Iq∂
∂f q 1+
⋅ ⋅ ⋅ ⋅
⋅ ⋅ ⋅ ⋅ ⋅
q 1+ q 1+ q 1+ q 1+
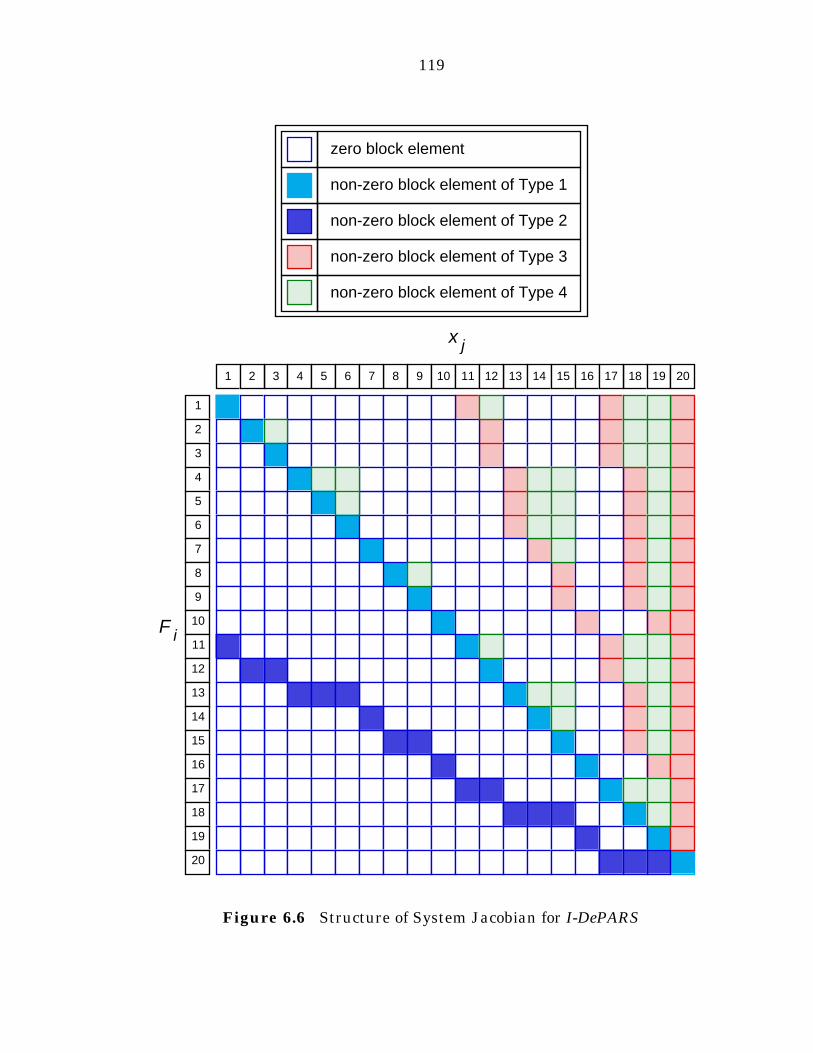
119
Figure 6.6 Structure of System Jacobian for I-DePARS
1 32 4 5 6 87 9 10 11 1312 14 15 16 1817 19 20
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
non-zero block element of Type 2
non-zero block element of Type 1
zero block element
non-zero block element of Type 3
non-zero block element of Type 4
x j
F i
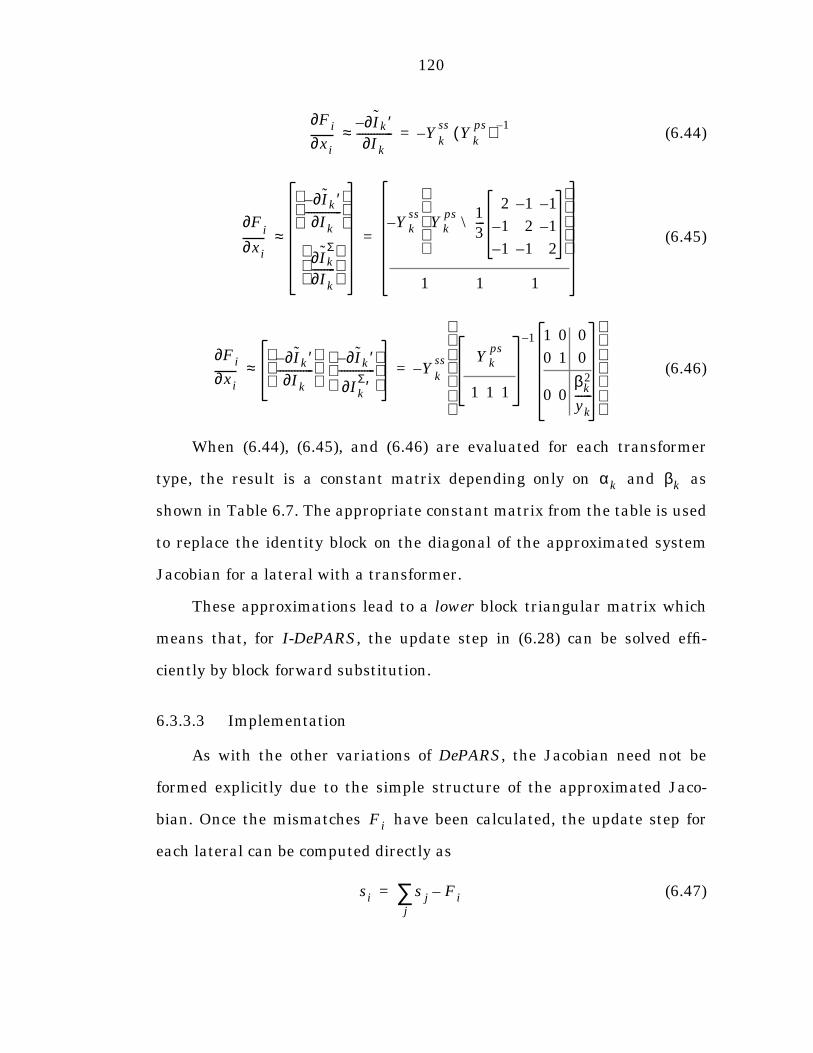
120
(6.44)
(6.45)
(6.46)
When (6.44), (6.45), and (6.46) are evaluated for each transformer
type, the result is a constant matrix depending only on and as
shown in Table 6.7. The appropriate constant matrix from the table is used
to replace the identity block on the diagonal of the approximated system
Jacobian for a lateral with a transformer.
These approximations lead to a lower block triangular matrix which
means that, for I-DePARS, the update step in (6.28) can be solved effi-
ciently by block forward substitution.
6.3.3.3 Implementation
As with the other variations of DePARS, the Jacobian need not be
formed explicitly due to the simple structure of the approximated Jaco-
bian. Once the mismatches have been calculated, the update step for
each lateral can be computed directly as
(6.47)
xi∂∂Fi Ik′∂–
Ik∂-------------≈ Y
kss
Ykps( ) 1–
–=
xi∂∂F
i
Ik′∂–
Ik∂-------------
IkΣ
∂Ik∂
--------
≈Yk
ssYk
ps 13---
2 1– 1–
1– 2 1–
1– 1– 2
\
–
1 1 1
=
xi∂∂Fi Ik′∂–
Ik∂-------------
Ik′∂–
IkΣ′∂
-------------
≈ Ykss Yk
ps
1 1 1
1– 1 0 0
0 1 0
0 0βk
2
yk------
–=
αk βk
Fi
si s jj
∑ Fi–=
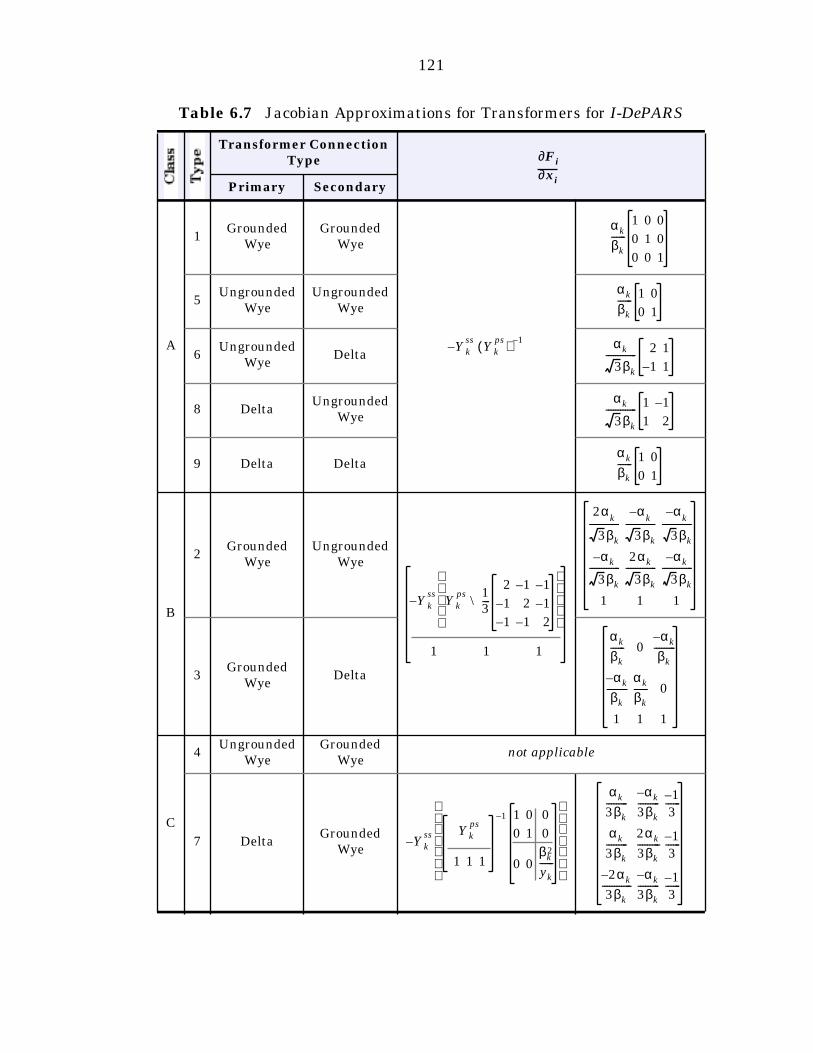
121
Table 6.7 Jacobian Approximations for Transformers for I-DePARS
Transformer Connection Type
Primary Secondary
A
1Grounded
WyeGrounded
Wye
5Ungrounded
WyeUngrounded
Wye
6Ungrounded
WyeDelta
8 DeltaUngrounded
Wye
9 Delta Delta
B
2Grounded
WyeUngrounded
Wye
3Grounded
WyeDelta
C
4Ungrounded
WyeGrounded
Wyenot applicable
7 DeltaGrounded
Wye
xi∂∂Fi
Ykss
Ykps( ) 1–
–
αk
βk
------1 0 0
0 1 0
0 0 1
αk
βk
------ 1 0
0 1
αk
3βk
------------- 2 1
1– 1
αk
3βk
------------- 1 1–
1 2
αk
βk
------ 1 0
0 1
Ykss
Ykps 1
3---
2 1– 1–
1– 2 1–
1– 1– 2
\
–
1 1 1
2αk
3βk
-------------α
k–
3βk
-------------α
k–
3βk
-------------
αk–
3βk
-------------2αk
3βk
-------------αk–
3βk
-------------
1 1 1
αk
βk
------ 0αk–
βk
---------
αk–
βk
---------αk
βk
------ 0
1 1 1
Ykss Yk
ps
1 1 1
1– 1 0 0
0 1 0
0 0βk
2
yk
------
–
αk
3βk
---------αk–
3βk
---------1–3------
αk
3βk
---------2αk
3βk
----------1–3------
2– αk
3βk
-------------αk–
3βk
---------1–3------
122
for laterals without transformers, and
(6.48)
for laterals with transformers. Here refers to the update step for
lateral j, where j is a sub-lateral of lateral i. The calculation of the update
steps must therefore proceed in RBF1 order.
One disadvantage to I-DePARS as compared to VI-DePARS is the
availability of a good starting value for the independent variable x. For
VI-DePARS the end voltages are set directly to balanced 1 per unit. How-
ever, some computation is required to find an initial value for the currents
injected into each lateral. This is typically done by current summation dur-
ing some type of backward sweep such as the one used in V-I-PARS.
6.3.4 S-DePARS
S-DePARS is the power flow based counterpart to I-DePARS and is a
generalization of the reduced power flow equations and fast decoupled
algorithm for radial systems first proposed in [12].
This approach is restricted to transformers of types 1, 5, and 9 which
have the same connection on both primary and secondary. For an ideal
transformer, there is no change in power from the primary to the second-
ary so an identity block is used for the corresponding diagonal block of the
system Jacobian. Unfortunately, for the other transformer connection
types there is no simple way to approximate the Jacobian, so they have not
been included in this formulation.
si xi∂
∂Fi
1–
sj
j∑ F
i–
=
s j

123
The approximate Jacobian for S-DePARS is identical to that of
I-DePARS. The update step in the Newton method can therefore be solved
by a block forward substitution.
6.4 Convergence Analysis
In this section, it will be shown that the fast decoupled algorithms
described here fall into the class of inexact Newton methods discussed in
[14]. In the classical Newton’s method shown in Table 6.1, the update step
at iteration i is the solution to
. (6.49)
In the inexact Newton methods, the corresponding equation is
, (6.50)
where the size of the residual is restricted so that the relative residual
is bound by some forcing sequence. Specifically,
, (6.51)
where is a forcing sequence which is uniformly less than one. Here
denotes an arbitrary norm in . Notice that the special case where
gives the exact Newton’s method.
A sequence of iterates produced by the inexact Newton
method is locally and linearly convergent. This result is stated and proved
as Theorem 2.3 in [14]. Using the present notation, this theorem asserts
the following:
si( )
Ji( )
si( )
Fi( )
–=
Ji( )
si( )
Fi( )
– ri( )
+=
ri( )
ri( )
Fi( )--------------- η i( )≤
η i( ){ }
. IRn
η i( )0≡
xi( ){ }
124
Assume that . There exists such that, if
, then the sequence of inexact Newton iterates
converges to . Moreover, the convergence is linear in
the sense that
(6.52)
where .
For the fast decoupled methods presented here, the update step can
be expressed as the solution to
, (6.53)
where is the constant approximation, shown in Figure 6.4,12 to the Jaco-
bian . With the definition
, (6.54)
(6.53) can be rewritten in the form of the inexact Newton equation of
(6.50),
(6.55)
where the residual is .
To prove that DePARS is, in fact, an inexact Newton method, and
therefore locally and linearly convergent, it remains to be shown that there
is some sequence , uniformly less than one, which bounds the rela-
tive residual. This relative residual can now be expressed as
. (6.56)
12 Or, for I-DePARS and S-DePARS, the transpose of the matrix shown in Figure 6.4.
η i( ) ηmaxt 1< <≤ ε 0>
x0( )
x∗– ε≤x
i( ){ } x∗
xi 1+( )
x∗– J∗ t xi( )
x∗– J∗≤
yJ∗ J x∗( )y≡
Jsi( )
Fi( )
–=
J
Ji( )
∆Ji( )
Ji( )
J–≡
Ji( )
si( )
Fi( )
– ∆Ji( )
si( )
+=
ri( ) ∆J
i( )s
i( )=
η i( ){ }
ri( )
Fi( )---------------
∆Ji( )
si( )
Jsi( )-----------------------------=
125
For a network with only grounded wye to grounded wye transformers some
conclusions can be drawn about the size of this residual under the follow-
ing assumptions:
• All voltage magnitudes are close to 1 per unit.
• All transformer tap ratios are close to one.
• All per unit network parameters13 are small compared to voltage magnitudes (i.e. they are ).
Given these assumptions, is of the form shown in Figure 6.4,14
where all diagonal terms are equal to or nearly equal to one and the off-
diagonal non-zero terms are equal to minus one. The matrix in the
residual term is the difference between the true Jacobian, whose structure
is shown in Figure 6.3, and . This elements of this matrix are all small
compared to one. This implies that
, (6.57)
hence can be chosen such that
, (6.58)
thereby completing the proof that DePARS is a locally and linearly conver-
gent inexact Newton method.
13 This includes all line and transformer impedances, line charging admittances, shuntadmittances, constant Z load admittances, constant PQ load power injections, and cogen-erator power injections.
14 Figure 6.6 for I-DePARS and S-DePARS.
1«
J
∆Ji( )
J
∆Ji( )
si( )
Jsi( )----------------------------- 1«
ηi( )
∆Ji( )
si( )
Jsi( )
----------------------------- η i( )1< <
126
6.5 Comments
As with the backward/forward sweep methods of Chapter 5, the fast
decoupled methods are applicable to a wide range of radial distribution
networks. The one modeling limitation of the general DePARS formulation
is that it does not include type 4 ungrounded wye to grounded wye trans-
formers. One variation, S-DePARS, is further restricted to transformers of
types 1, 5, and 9, all of which have identical connection and grounding on
both primary and secondary sides.
As with BFS-PARS, the power flow based variations typically require
more computation per iteration than their current based counterparts.
Considering this difference and the fact that S-DePARS is limited to only
three types of transformer connections, VI-DePARS and I-DePARS appear
to be the most attractive of the four fast decoupled methods. VI-DePARS
has the added advantage of readily available initial values for the indepen-
dent variable x.
As with NR-PARS and BFS-PARS, the amount of computation
required per iteration is proportional to the number of buses. For a con-
stant number of iterations for convergence, the computational complexity
increases linearly with the size of the system, making DePARS effective for
very large radial distribution networks.
127
Chapter 7
Power Flow Algorithms for Weakly Meshed Systems (PAWMS)
The previous chapters have dealt with electric distribution systems
with a radial topological structure. The algorithms developed and pre-
sented in these chapters are specific to networks which do not contain any
loops. This chapter investigates an approach for extending these radial
algorithms to handle systems with a limited number of loops. The result-
ing class of algorithms will be referred to as Power flow Algorithms for
Weakly Meshed Systems, or PAWMS.
The approach taken by PAWMS requires that the meshed system be
converted to a radial structure by breaking each of the loops. The current
or power injections at each breakpoint are adjusted in order to balance the
voltages at either side using a compensation method [30]. Variations of this
method have been presented in [23], [19], and [20] for single-phase net-
works, and more recently in [11] for three-phase systems. The approach
presented here generalizes these to work with the various three-phase
radial power flow algorithms presented in this dissertation.

128
Apart from handling cases with loops, the compensation method also
makes it possible to solve systems with more than one voltage controlled
bus. These can be secondary sources with both voltage magnitude and
angle specified, or PV buses which specify voltage magnitude and real
power injection. First, the method of dealing with loops is described in
detail, followed by the modifications necessary for secondary sources and
PV buses.
7.1 Detailed Solution Algorithm
Since PAWMS is based on a radial power flow solver, the weakly
meshed system must first be converted to a radial structure. This is done
by choosing a bus for each loop to serve as the breakpoint. Figure 7.1
shows a system with a loop containing bus k. This loop can be broken by
splitting bus k to create a new artificial bus . The solution of the original
meshed network is equivalent to the solution of the resulting radial system
under the constraints that and the current injection at bus is
the negative of the injection at bus k.
The actual creation of the artificial buses to break the loops is per-
formed once during the initialization process. The algorithm, after initial-
ization, consists of two steps which are repeated until convergence is
achieved, as shown in Table 7.1. First, the breakpoint voltages are updated
via a radial power flow method. Then, the current injections, at bus k
and at bus , are adjusted according to the breakpoint voltages in
order to eliminate any mismatch. The adjustment is based on the sensitiv-
ity of the breakpoint voltage mismatch to changes in the breakpoint cur-
rent injections. This sensitivity is approximated by the breakpoint
k′
Vk Vk′= k′
IBPj
I– BPj k′
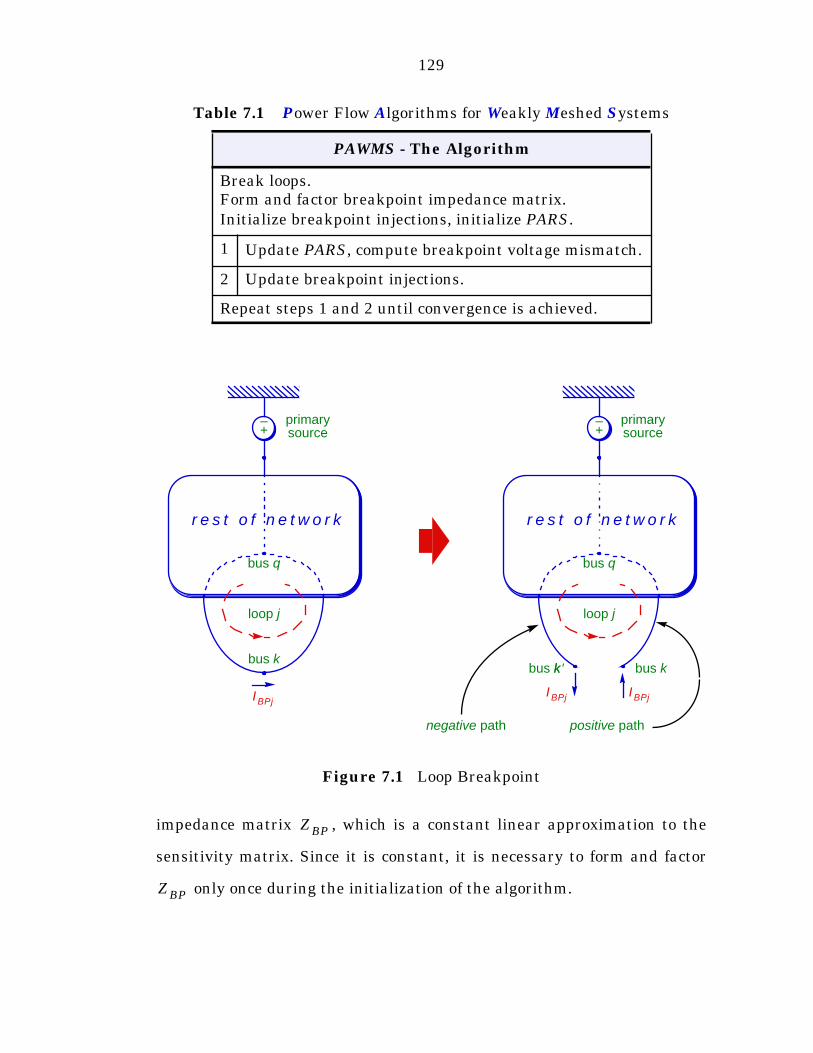
129
impedance matrix , which is a constant linear approximation to the
sensitivity matrix. Since it is constant, it is necessary to form and factor
only once during the initialization of the algorithm.
Table 7.1 Power Flow Algorithms for Weakly Meshed Systems
PAWMS - The Algorithm
Break loops.Form and factor breakpoint impedance matrix.Initialize breakpoint injections, initialize PARS.
1 Update PARS, compute breakpoint voltage mismatch.
2 Update breakpoint injections.
Repeat steps 1 and 2 until convergence is achieved.
Figure 7.1 Loop Breakpoint
r e s t o f n e t w o r k
bus kk ′ bus kbus k
loop j
IBPjIBPj IBPj
+– primary
loop j
+– primary
bus q
r e s t o f n e t w o r k
bus q
negative path positive path
sourcesource
ZBP
ZBP
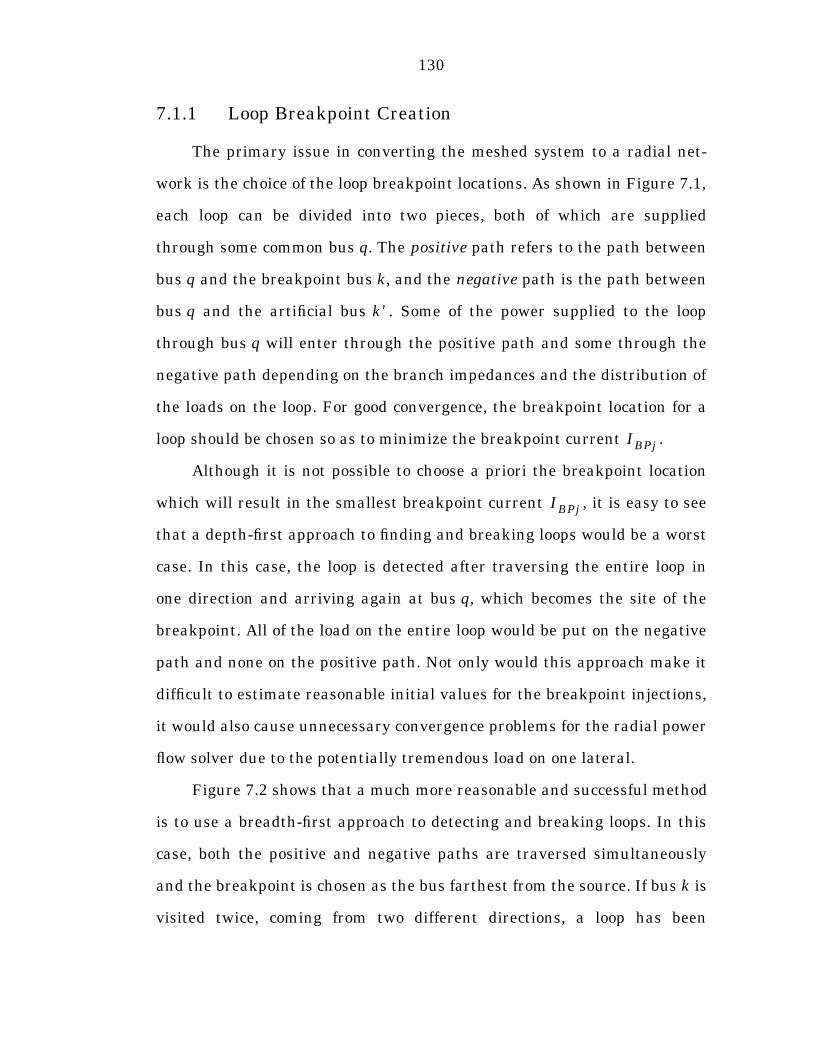
130
7.1.1 Loop Breakpoint Creation
The primary issue in converting the meshed system to a radial net-
work is the choice of the loop breakpoint locations. As shown in Figure 7.1,
each loop can be divided into two pieces, both of which are supplied
through some common bus q. The positive path refers to the path between
bus q and the breakpoint bus k, and the negative path is the path between
bus q and the artificial bus . Some of the power supplied to the loop
through bus q will enter through the positive path and some through the
negative path depending on the branch impedances and the distribution of
the loads on the loop. For good convergence, the breakpoint location for a
loop should be chosen so as to minimize the breakpoint current .
Although it is not possible to choose a priori the breakpoint location
which will result in the smallest breakpoint current , it is easy to see
that a depth-first approach to finding and breaking loops would be a worst
case. In this case, the loop is detected after traversing the entire loop in
one direction and arriving again at bus q, which becomes the site of the
breakpoint. All of the load on the entire loop would be put on the negative
path and none on the positive path. Not only would this approach make it
difficult to estimate reasonable initial values for the breakpoint injections,
it would also cause unnecessary convergence problems for the radial power
flow solver due to the potentially tremendous load on one lateral.
Figure 7.2 shows that a much more reasonable and successful method
is to use a breadth-first approach to detecting and breaking loops. In this
case, both the positive and negative paths are traversed simultaneously
and the breakpoint is chosen as the bus farthest from the source. If bus k is
visited twice, coming from two different directions, a loop has been
k′
IBPj
IBPj
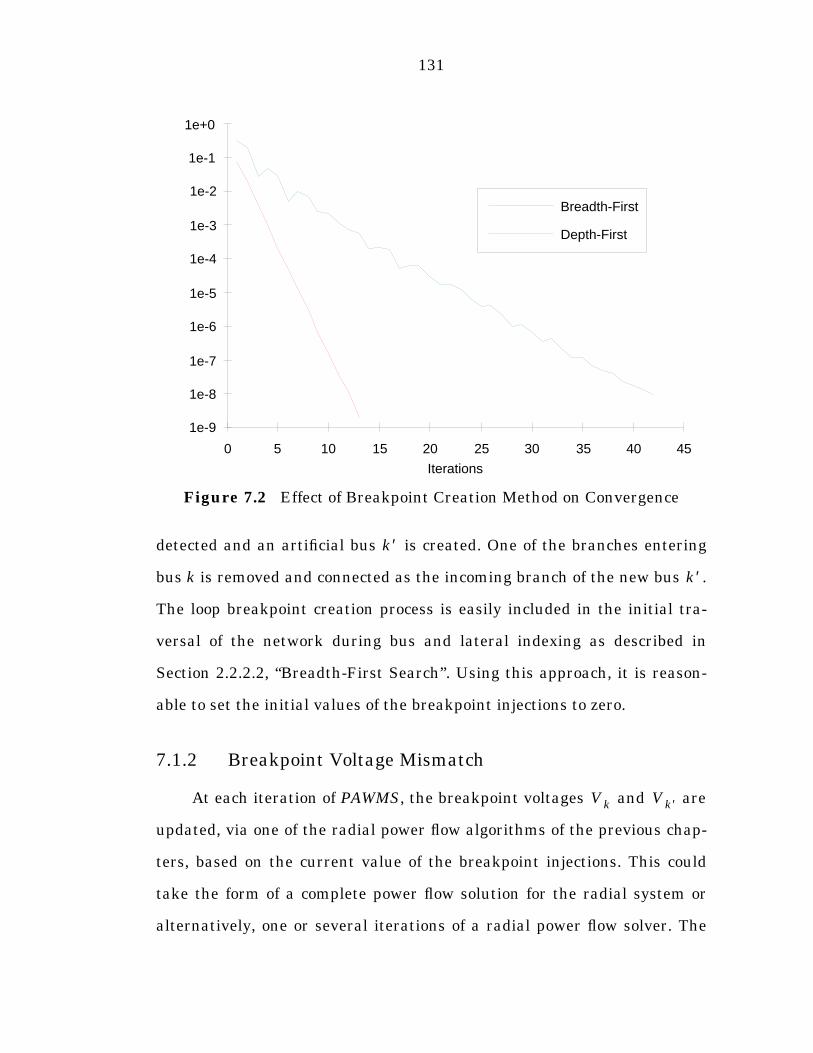
131
detected and an artificial bus is created. One of the branches entering
bus k is removed and connected as the incoming branch of the new bus .
The loop breakpoint creation process is easily included in the initial tra-
versal of the network during bus and lateral indexing as described in
Section 2.2.2.2, “Breadth-First Search”. Using this approach, it is reason-
able to set the initial values of the breakpoint injections to zero.
7.1.2 Breakpoint Voltage Mismatch
At each iteration of PAWMS, the breakpoint voltages and are
updated, via one of the radial power flow algorithms of the previous chap-
ters, based on the current value of the breakpoint injections. This could
take the form of a complete power flow solution for the radial system or
alternatively, one or several iterations of a radial power flow solver. The
Figure 7.2 Effect of Breakpoint Creation Method on Convergence
Iterations
1e-9
1e-8
1e-7
1e-6
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
0 5 10 15 20 25 30 35 40 45
Breadth-First
Depth-First
k′
k′
Vk Vk′

132
resulting breakpoint voltages are then used to compute the mismatch for
each loop j with breakpoint k.
(7.1)
Each complex three-phase voltage can be represented by
a 6 x 1 vector containing its real and imaginary parts.
(7.2)
The breakpoint voltage mismatch vector is formed by combining the
mismatches for each loop j as follows:
(7.3)
This is a x 1 real vector, where nlp is the number of loops in the
network.
7.1.3 Breakpoint Impedance Matrix
In order to update the breakpoint injections in a way which elimi-
nates the breakpoint voltage mismatches, it is necessary to know the corre-
sponding sensitivity information. A linear approximation to these
sensitivities is given by the breakpoint impedance matrix . For a
three-phase system, is a real, non-sparse, square matrix of dimension
.
∆V BPj Vk′ Vk–=
V E jF+=
V EF
=
∆V BP
∆V BPj
∆V BP
∆EBP1
∆FBP1
∆EBP2
∆FBP2
∆EBPnlp
∆FBPnlp
=
6 nlp⋅( )
ZBP
ZBP
6 nlp⋅( )

133
Let each complex three-phase current also be represented
by a 6 x 1 vector of its real and imaginary parts, however, with the imagi-
nary part negated.
(7.4)
The reason for this separation into real and imaginary parts will be seen
clearly in Section 7.1.6, “PV Buses”. The breakpoint currents for each
loop j are then combined to form the x 1 real breakpoint injection
vector
(7.5)
The breakpoint impedance matrix is an approximation of the
sensitivity of to changes in . This relationship can be written
(7.6)
The matrix consists of 6 x 6 block elements corresponding to
loops i and j. These blocks can be constructed directly according to the fol-
lowing observations:
I C jD+=
I C
D–=
IBPj
6 nlp⋅( )
IBP
CBP1
DBP1–
CBP2
DBP2
–
CBPnlp
DBPnlp–
=
ZBP
∆VBP
IBP
∆VBP
ZBP
∆IBP
=
ZBP ZBPij

134
• For diagonal blocks where , is the sum of the branch impedances in loop i.
• For off-diagonal blocks where , the magnitude of is the sum of the impedances of branches common to loops i and j. The sign is negative if the loops have opposite direction and positive if they have the same direction.1
To be consistent with the representations of voltage and current in (7.2)
and (7.4), the branch impedances are represented as
(7.7)
Since is constant, it is only formed once at the beginning of the
algorithm. It can also be factored once via LU decomposition as
(7.8)
and its triangular factors and stored for later use in solving for
from (7.6).
7.1.4 Breakpoint Injections
The second part of each iteration of PAWMS is to update the break-
point current injections. This involves solving for from the set of lin-
ear equations in (7.6) via backward and forward substitution using the
triangular factors from (7.8).
(7.9)
The appropriate element is then added as a correction to the
current value of the injection for loop j.
(7.10)
1 The direction of a loop is arbitrarily defined to be toward the source on the positivepath and away from the source on the negative path. This is also the convention used forthe direction of the breakpoint current as shown in Figure 7.1.
i j= ZBPij
i j≠ ZBPij
Z R jX+=
Z R X
X R–=
ZBP
ZBP
LBP
UBP
⋅→
LBP UBP
∆IBP
∆IBP
∆IBP UBP LBP ∆V BP\( )\=
∆IBPj
IBPj IBPj ∆IBPj+←
135
These new current injections are used with positive and negative signs,
respectively, at the corresponding breakpoint buses and k during the
next radial power flow update.
7.1.5 Multiple Sources
Throughout the preceding chapters of this dissertation, it has always
been assumed that the network under consideration has a single voltage
specified bus denoted as the source. The compensation method used to deal
with loops in a system can also be applied to the problem of multiple
sources. In a network with multiple sources, one of them is arbitrarily cho-
sen as the primary source and is used as the source for the purposes of the
radial load flow algorithms.
Each of the other secondary sources is treated as a normal load bus
with an extra current injection. For a secondary source at bus k, the volt-
age constraint creates a loop j through ground, which can be broken as
shown in Figure 7.3.
In this case, the artificial bus need not be created explicitly. The
voltage mismatch for a secondary source at bus k is simply
. (7.11)
The corresponding breakpoint current injection is the current injected
into the system at bus k by the secondary source. Although the negative
path of a loop formed by a secondary source has no impedance, the forma-
tion of the breakpoint impedance matrix does not change from the
method described above for simple loops.
k′
k′
∆V BPj
∆V BPj Vkspecified
Vk–=
IBPj
ZBP
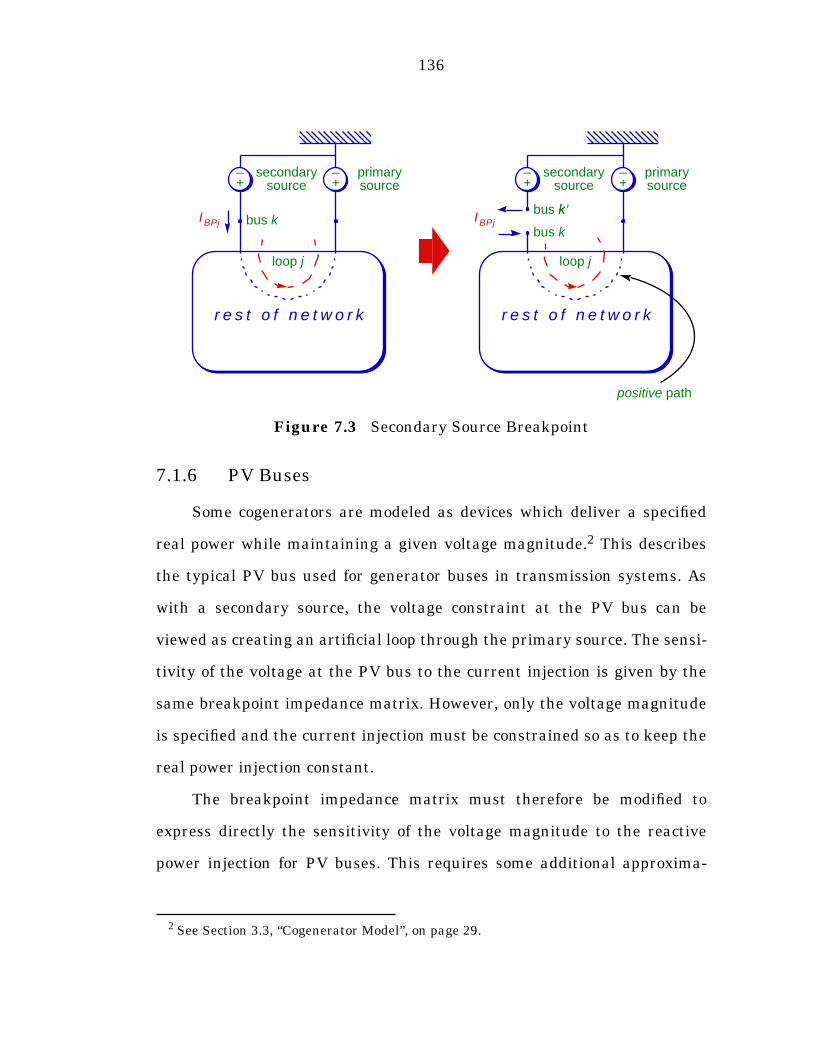
136
7.1.6 PV Buses
Some cogenerators are modeled as devices which deliver a specified
real power while maintaining a given voltage magnitude.2 This describes
the typical PV bus used for generator buses in transmission systems. As
with a secondary source, the voltage constraint at the PV bus can be
viewed as creating an artificial loop through the primary source. The sensi-
tivity of the voltage at the PV bus to the current injection is given by the
same breakpoint impedance matrix. However, only the voltage magnitude
is specified and the current injection must be constrained so as to keep the
real power injection constant.
The breakpoint impedance matrix must therefore be modified to
express directly the sensitivity of the voltage magnitude to the reactive
power injection for PV buses. This requires some additional approxima-
2 See Section 3.3, “Cogenerator Model”, on page 29.
Figure 7.3 Secondary Source Breakpoint
bus kk ′bus kIBPj
+– primary
r e s t o f n e t w o r k
loop j
positive path
source+– secondary
source
bus kIBPj
+– primary
r e s t o f n e t w o r k
loop j
source+– secondary
source

137
tions and a change of basis for voltage and current vectors V and I, and
impedance matrices Z, as given in (7.2), (7.4), and (7.7).
Define a rotation matrix U to rotate phases b and c by 120° and -120°,
respectively,
, (7.12)
where , and note that
. (7.13)
For 3 x 1 complex vectors V and I, and 3 x 3 complex matrix Z, let
(7.14)
(7.15)
(7.16)
This set of definitions corresponds to a change of basis or rotation of the
phase b and phase c voltages and currents.
Assuming a three-phase network with a balanced 1 per unit primary
source and no phase shifts, the magnitude of each element of is equal to
the magnitude of the corresponding element of V and is therefore close to
1 per unit. The angles of the elements of , however, are all nearly
zero, leading to the following approximations to the real and imaginary
parts of .
U1 0 0
0 α 0
0 0 α2
=
α ej2π3
------ 12---– j
32
-------+= =
U 1– U∗1 0 0
0 α2 0
0 0 α
= =
V′ UV≡
I′ UI≡
Z′ UZU 1–≡
V′
θ′ V′
V′ E′ jF ′+=
138
(7.17)
(7.18)
If V is the voltage of a PV bus and I is the corresponding current injec-
tion, the change in complex power injection can be
expressed in terms of and the change in , and separated into is real
and reactive parts as follows:
(7.19)
Applying the approximations to and from (7.17) and (7.18) yields
(7.20)
. (7.21)
If is a sensitivity matrix relating the breakpoint voltage mis-
match for loop i to the breakpoint current injection for loop j,
then is the corresponding sensitivity matrix for and .
This is shown by the following equation where the subscripts have been
dropped to simplify the presentation.
E′ V′ V1
1
1
≈=≈
F′ θ′0
0
0
≈ ≈
∆S ∆P j∆Q+=
V′ I′
∆S V ∆I∗.*
V UU∗∆I∗( ).*
UV U∆I( ) ∗.*
V′ ∆I′∗.*
E′ jF ′+( ) ∆C′ j∆D′–( ).*
E′ ∆C′.* F′ ∆D′.*+( ) j F′ ∆C′.* E′ ∆D′.*–( )+
=
=
=
=
=
=
∆Q∆P
E′ F′
∆P ∆C′≈
∆Q ∆– D′≈
ZBPij
∆VBPi
IBPj
Z′BPij
∆V′BPi
I′BPj
139
(7.22)
This complex equation can be represented by the following real equation:
(7.23)
If loop i is due to a PV bus, the approximations from (7.17) and (7.18)
are applied and only the first block row of (7.23) is considered since there is
no constraint on the voltage angles.
(7.24)
If loop j is due to a PV bus, the approximations from (7.20) and (7.21) are
applied and, since the real power injection is fixed, is zero so only the
second block column is needed.
(7.25)
If both loops are due to PV buses, both sets of approximations apply and
the relevant equation is
. (7.26)
The value actually used for the voltage magnitude mismatch at a PV
bus k is
. (7.27)
This gives the change in the real part of due to the difference between
the specified and calculated values of the voltage magnitudes, assuming
the angle is left as calculated.
∆V′ U∆V
UZ∆I
UZU 1– U∆I
Z′∆I′
=
=
=
=
∆E′∆F′
R′ X′X′ R′–
∆C′∆D′–
=
∆ V ∆E′≈ R′ X′∆C′∆D′–
=
∆P
∆E′∆F′
X′R′–
∆D′–( ) X′R′–
∆Q≈ ≈
∆ V ∆E′ X′ ∆D′–( ) X′∆Q≈ ≈ ≈
∆E′k Vkspecified
Vk–( ) E′k Vk. /.*=
V′k
140
7.1.7 Summary
To yield a unified approach for dealing with loops, secondary sources,
and PV buses, a change of basis is made according to (7.14)-(7.16) for all
breakpoint voltages, all breakpoint current injections, and all branch
impedances used in the formation of the breakpoint impedance matrix,
now denoted . With the inclusion of PV buses, the matrix is
formed as before, with the exception of block rows and columns correspond-
ing to PV buses. These block rows contain only the rows corresponding to
(the first three), and the block columns contain only the columns cor-
responding to (the last three). Each additional loop or secondary
source adds six rows and columns to , while a PV bus only adds three.
A simple example of a system with one loop, one secondary source,
and one PV bus illustrates the structure of the breakpoint mismatch and
injection vectors and the breakpoint impedance matrix.
(7.28)
7.1.8 Termination Criterion
At each step of PAWMS, the breakpoint current injection is updated
according to the breakpoint voltage mismatch. Convergence is achieved
and the algorithm terminated when the norm of this mismatch is reduced
below a pre-determined constant tolerance.
Z′BP Z′BP
∆E′
∆Q
Z′BP
∆E′1∆F′
1
∆E′2∆F′2∆E′3
R′11 X′11 R′12 X′12 X′13
X′11
R′11
– X′12
R′12
– R′13
–
R′12 X′12 R′22 X′22 X′23
X′12 R′12– X′22 R′22– R′23–
R′13 X′13 R′23 X′23 X′33
∆C′1∆D′
1–
∆C′2∆D′2–
∆Q3
=
141
7.2 Implementation
Since the compensation method used to eliminate breakpoint voltage
mismatches is independent of the radial power flow algorithm used to com-
pute these mismatches, this independence was preserved in the implemen-
tation. The program was structured in a way which allows any of the
variations of NR-PARS, BFS-PARS, or DePARS to be used as the radial
solver.
7.2.1 Modeling Limitations and Simplifying Assumptions
The algorithm used to form the breakpoint impedance matrix is based
closely on the one from [20]. Since this method builds the matrix directly
from sums of branch impedances, it is not suited to loops which contain
some grounded and some ungrounded sections. For this reason, the imple-
mentation was restricted to networks with only type 1 grounded wye to
grounded wye transformers.
To simplify the code, the following additional assumptions were made.
All loops, including those formed by secondary sources and PV buses, are
three-phase only. This eliminates the need to deal with different dimen-
sions for breakpoint voltages and injections. It is also assumed that no two
loops result in a breakpoint at the same bus, preventing the need for a
variable number of breakpoint injection vectors for any given bus.
7.2.2 Termination of Radial Power Flow
Each iteration of PAWMS requires the computation of the breakpoint
voltage mismatch via one of the radial power flow algorithms presented in
previous chapters. However, depending on the tolerance used for the radial
142
power flow convergence criterion, a completely converged result may not be
necessary, especially in the first several iterations of PAWMS. In fact, in
some cases, a single iteration of the radial power flow may be sufficient to
achieve satisfactory convergence for PAWMS.
As implemented, the program allows for three possible modes of oper-
ation. In addition to converged sets and single iterations of the radial
power flow, an adaptive method is also included. This adaptive strategy is
based on a heuristic which attempts to set the tolerance for the radial
power flow for a given iteration such that the breakpoint voltage mis-
matches computed are only as accurate as necessary.
Using the maximum change in bus voltage as the mismatch for the
radial solver, a tolerance of typically results in bus voltages accurate
to about . This is generally sufficient for the computation of
breakpoint mismatches on the order of . An estimate of the breakpoint
voltage mismatch at the next iteration can therefore be used as a reason-
able tolerance for the current radial power flow. This estimate is readily
computed from the current breakpoint voltage mismatch and the current
rate of convergence, as calculated from the current and previous mis-
matches. This is the approach used by the adaptive method implemented
in the program.
7.3 Variations
Several modifications to the basic PAWMS presented here have been
considered. They are based primarily on the various approaches presented
in [23], [19], and [20] for single-phase power flow in weakly meshed sys-
tems.
10 n–
10 n 1+( )–
10 n–
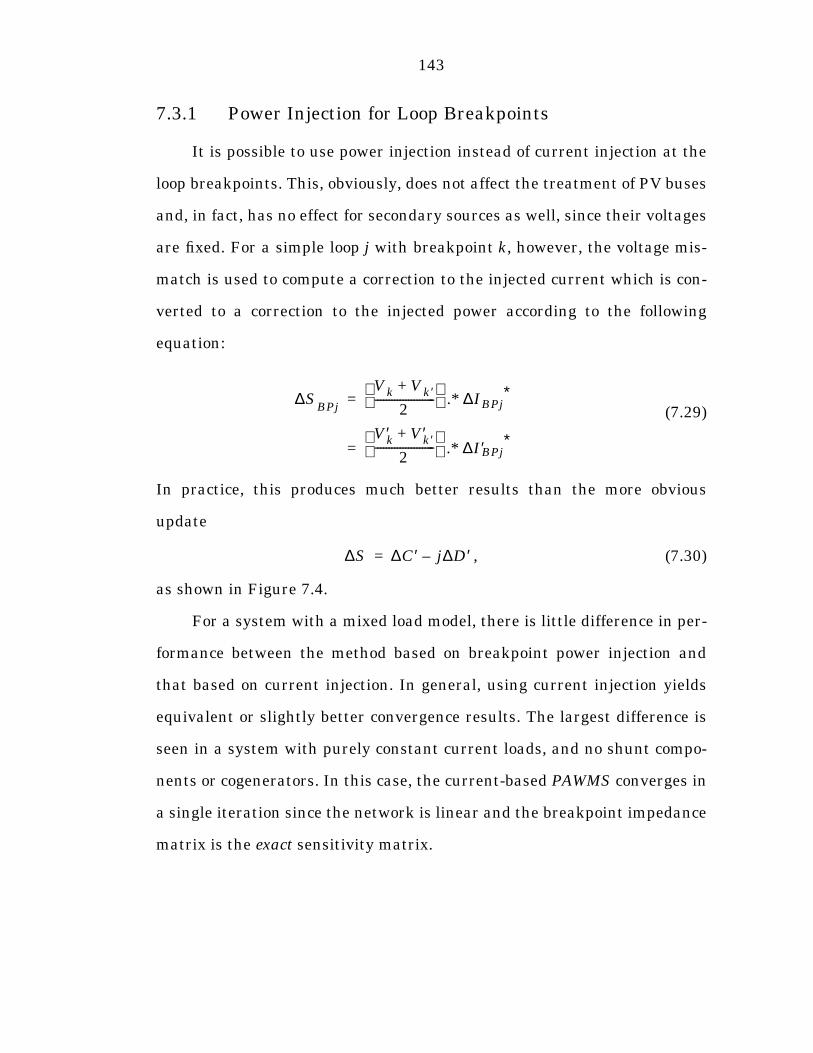
143
7.3.1 Power Injection for Loop Breakpoints
It is possible to use power injection instead of current injection at the
loop breakpoints. This, obviously, does not affect the treatment of PV buses
and, in fact, has no effect for secondary sources as well, since their voltages
are fixed. For a simple loop j with breakpoint k, however, the voltage mis-
match is used to compute a correction to the injected current which is con-
verted to a correction to the injected power according to the following
equation:
(7.29)
In practice, this produces much better results than the more obvious
update
, (7.30)
as shown in Figure 7.4.
For a system with a mixed load model, there is little difference in per-
formance between the method based on breakpoint power injection and
that based on current injection. In general, using current injection yields
equivalent or slightly better convergence results. The largest difference is
seen in a system with purely constant current loads, and no shunt compo-
nents or cogenerators. In this case, the current-based PAWMS converges in
a single iteration since the network is linear and the breakpoint impedance
matrix is the exact sensitivity matrix.
∆SBPj
Vk Vk′+
2----------------------
∆IBPj∗.*
V′k V′k′+
2----------------------
∆I′BPj
∗.*
=
=
∆S ∆C′ j∆D′–=
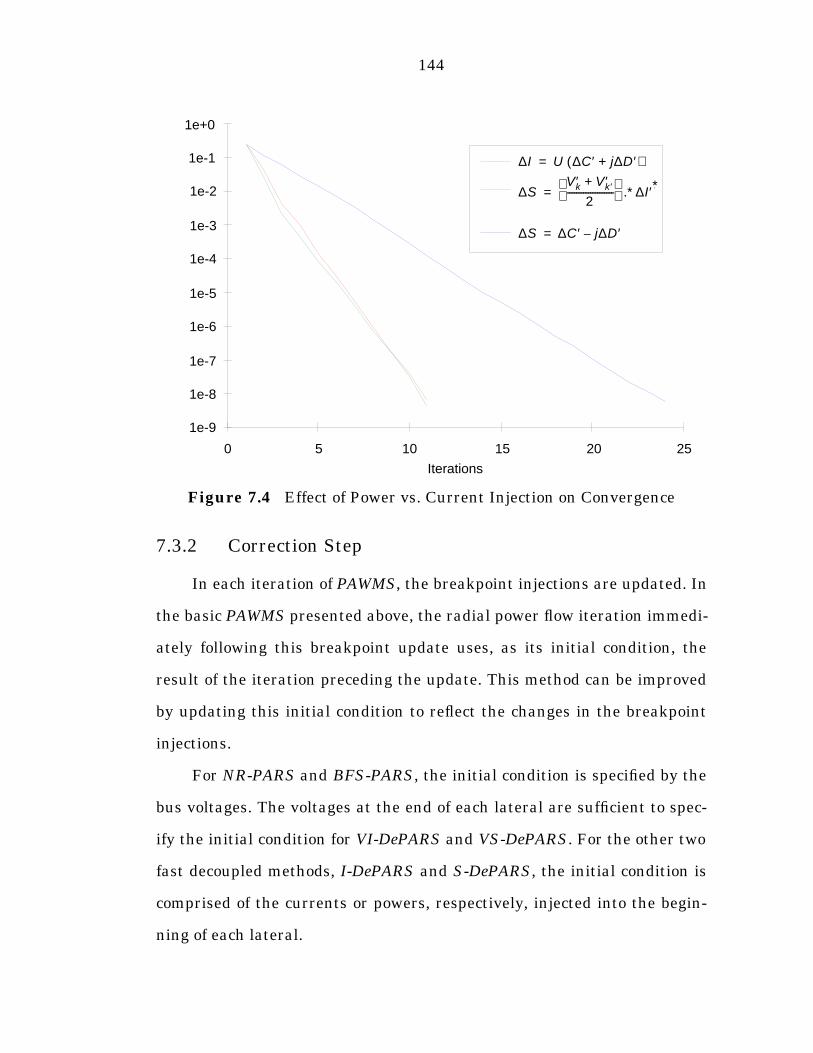
144
7.3.2 Correction Step
In each iteration of PAWMS, the breakpoint injections are updated. In
the basic PAWMS presented above, the radial power flow iteration immedi-
ately following this breakpoint update uses, as its initial condition, the
result of the iteration preceding the update. This method can be improved
by updating this initial condition to reflect the changes in the breakpoint
injections.
For NR-PARS and BFS-PARS, the initial condition is specified by the
bus voltages. The voltages at the end of each lateral are sufficient to spec-
ify the initial condition for VI-DePARS and VS-DePARS. For the other two
fast decoupled methods, I-DePARS and S-DePARS, the initial condition is
comprised of the currents or powers, respectively, injected into the begin-
ning of each lateral.
Figure 7.4 Effect of Power vs. Current Injection on Convergence
Iterations
1e-9
1e-8
1e-7
1e-6
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
0 5 10 15 20 25
∆I = U(∆C'+j∆D')
∆S = (V1+V2)/2 *conj(∆I)
∆S = ∆C'-j∆D'∆S ∆C′ j∆D′–=
∆SV′k V′k ′+
2--------------------
∆I′∗.*=
∆I U ∆C′ j∆D′+( )=
145
First consider the correction for NR-PARS and BFS-PARS. This volt-
age correction step adjusts the bus voltages to reflect the change in the
breakpoint injections according to the method presented in [20]. A back-
ward/forward sweep of the radial network is performed with:
• all loads, shunts, and cogenerators disconnected
• breakpoint injections set to their incremental values (the change in injection just computed)
• source voltage set to zero
The bus voltages computed from this process are incremental values
reflecting the change in bus voltages due to the change in breakpoint injec-
tion. These incremental voltages are added to the bus voltages from the
previous radial power flow iteration, resulting in a better starting point for
the new radial power flow.
For VI-DePARS and VS-DePARS, each iteration consists of a mis-
match evaluation followed by an update to the end voltages. The voltage
correction step described above can be used to calculate the incremental
voltages. In this case, it is only necessary to add the incremental values to
the end voltages since they are used to update all other bus voltages in the
succeeding mismatch evaluation.
When using I-DePARS and S-DePARS, the breakpoint injections are
updated immediately following a function evaluation. Each iteration of the
radial power flow then begins with the update to the independent vari-
ables, based on the mismatch from the previous iteration, and ends with
the evaluation of a new mismatch. It is convenient to switch this order
from that used by the other two DePARS methods above to allow for a mis-
match correction to adjust for the change in breakpoint injections.
146
The effect of a change in the injection at a particular breakpoint then
is simply to increase the corresponding lateral’s mismatch by the amount
of the change. The only other detail is that, for I-DePARS, incremental
power injections are converted to their approximate current equivalents3
before adding them to the appropriate mismatch. Likewise, for S-DePARS,
incremental current injections are converted to their approximate power
equivalents.3
The effect of adding a correction step to PAWMS is to improve the
overall convergence characteristics of the algorithm. Using the correction
step typically reduces the total number of radial power flow iterations
required to solve the weakly meshed power flow.
7.4 Comments
For a distribution system with a small number of loops, secondary
sources, and PV buses, the size of the breakpoint impedance matrix is rela-
tively small. The computation involved in forming and factoring the matrix
is still relatively small compared to the work required for the solution of
the radial system. However, as the number of loops grows, the computa-
tional burden associated with the breakpoint impedance matrix grows.
Since is, in general, not necessarily sparse, at some point, as the num-
ber of loops increases, the work associated with becomes so large that
it is more efficient to use a general nodal approach, such as the traditional
Newton-Raphson or Implicit Zbus Gauss methods. For this reason, PAWMS
is well suited to weakly meshed systems, but less well suited to the highly
connected structure of a typical transmission network.
3 Based on balanced 1 per unit voltages.
ZBP
ZBP
147
Another issue raised by extending a radial power flow technique to
handle weakly meshed systems is that of the existence and uniqueness of
solutions. According to [13], a typical radial distribution network always
has a unique feasible power flow solution. On the other hand, it is a well-
known fact that a meshed transmission network may have many feasible
steady-state equilibrium points or none at all. The solution found by
PAWMS for a weakly meshed distribution network may therefore not be a
unique feasible solution. Presumably, choosing a different initial value for
the breakpoint injections could result in a different solution to the power
flow problem. Furthermore, divergence of the algorithm in certain cases
could be due to the lack of a feasible solution.
148
Chapter 8
Simulation Results
All of the algorithms under consideration were implemented in a pro-
gram written for MATLAB®.1 The program reads the network data once
from a text file and then stores it in binary format for later use. After read-
ing the network data, either from the original text file or from the binary
file, the network is traversed as described in Section 2.2.2.2, “Breadth-
First Search”. During this traversal the nodes and laterals are indexed,
data is verified for consistency, and sections are marked as grounded or
ungrounded. Since it is common to all of the methods, this preprocessing
step is omitted from the comparison of computational effort associated
with each algorithm.
MATLAB® is a high-level interpreted language designed with matrix
manipulation in mind. The version used for this implementation,
version 4, includes sparse matrix storage and manipulation as built-in
functions. These capabilities made it an attractive choice for quick imple-
mentation and testing of ideas during the stage of algorithm development.
1 MATLAB® is a trademark of The MathWorks, Inc.
149
For the analysis of the algorithms, the interpreted nature of MATLAB®
makes it ideal for observing the behavior of individual parameters. On the
other hand, an interpreted language is usually quite a bit slower in execu-
tion than the compiled languages typically used for power flow, such as
Fortran or C. For this reason, MATLAB® is probably not the language of
choice for a program intended for use in industry. On a sufficiently fast
workstation, however, computation time for this implementation was not a
problem even with networks of more than 1000 buses.
The goal of this analysis of the results of the MATLAB® simulation is to
draw some meaningful conclusions about the behavior of the algorithms in
a compiled language, such as Fortran or C. This entails comparisons of the
effectiveness of each of the algorithms presented in Chapter 4 through
Chapter 7 relative to one another and relative to other relevant power flow
algorithms.
For this purpose, computation time in MATLAB® is nearly meaning-
less. In MATLAB®, solving a set of linear equations is a built-in function and
therefore executes at approximately the same speed as Fortran or C. Sim-
ple loops, however, are many times slower since each line is interpreted
each time through the loop. Consequently, the run time of an algorithm in
MATLAB® may be completely unrelated to the run time of the same algo-
rithm in Fortran or C. The number of floating point operations (flops)
required, though not a perfect measure, is chosen as a much better indica-
tor of relative run time in a compiled language.
150
8.1 Summary of Algorithms Tested
The simulations performed involve 16 different algorithms which can
be classified into the following four categories:
• traditional algorithms for the standard formulation (Newton-Raphson, Implicit Zbus Gauss)
• network reduction methods (NR-PARS)
• backward/forward sweep methods (BFS-PARS)
• fast decoupled methods (DePARS)
These algorithms are summarized in Table 8.1. The first class,
included for the sake of comparison, consists of standard power flow meth-
ods applied to the traditional power flow formulation for general meshed
systems. The remaining three classes are for radial networks only and are
collectively referred to as PARS (Power flow Algorithms for Radial Sys-
tems). Each variation of PARS can be extended, as described in Chapter 7,
to solve the power flow for weakly meshed networks. When a particular
version of PARS is used in conjunction with these extensions, the “PARS”
in the name of the algorithm is simply changed to “PAWMS” (Power flow
Algorithms for Weakly Meshed Systems).
Since the two traditional distribution power flow algorithms tested,
Newton-Raphson and Implicit Zbus Gauss, have not been discussed in pre-
vious chapters, each of them will be described briefly.
8.1.1 Newton-Raphson Method
The traditional formulation of the distribution power flow problem is
a set of power balance equations at each load bus as a function of the bus
voltages. Let be the vector of net power injected into the system at
Ybus
Sbus
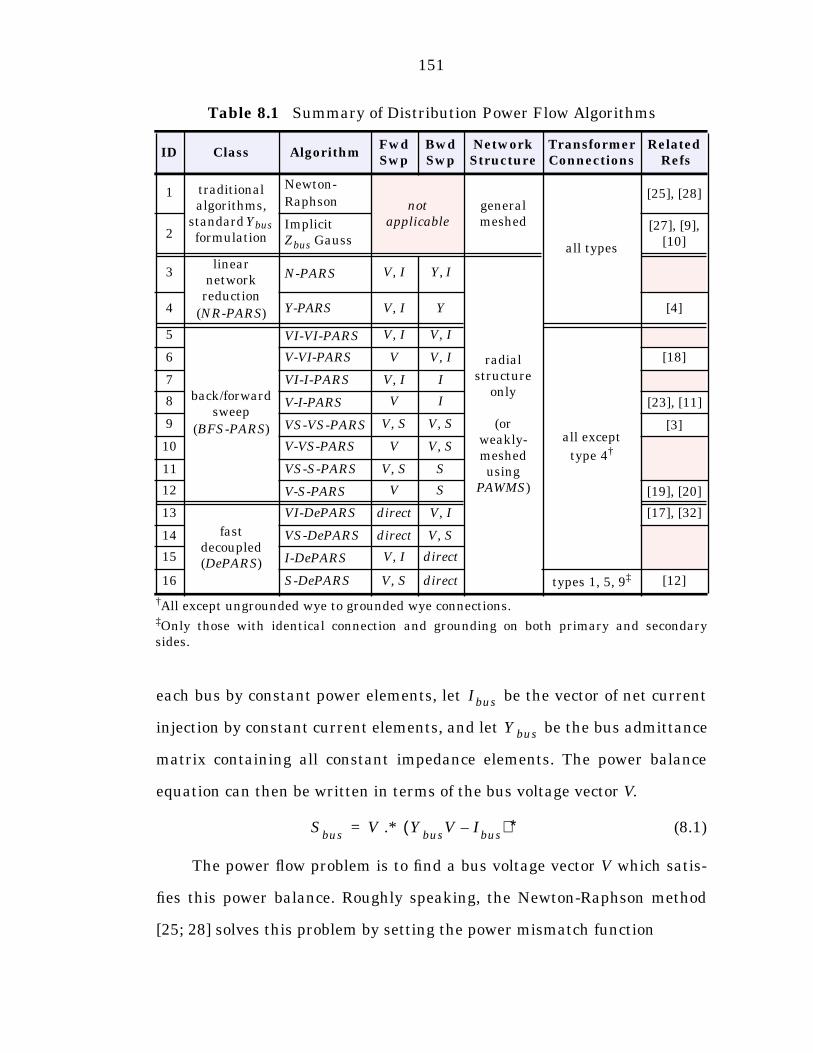
151
each bus by constant power elements, let be the vector of net current
injection by constant current elements, and let be the bus admittance
matrix containing all constant impedance elements. The power balance
equation can then be written in terms of the bus voltage vector V.
(8.1)
The power flow problem is to find a bus voltage vector V which satis-
fies this power balance. Roughly speaking, the Newton-Raphson method
[25; 28] solves this problem by setting the power mismatch function
†All except ungrounded wye to grounded wye connections.‡Only those with identical connection and grounding on both primary and secondarysides.
Table 8.1 Summary of Distribution Power Flow Algorithms
ID Class AlgorithmFwdSwp
BwdSwp
NetworkStructure
TransformerConnections
Related Refs
1 traditional algorithms,
standard Ybus formulation
Newton-Raphson not
applicablegeneral meshed
all types
[25], [28]
2Implicit Zbus Gauss
[27], [9], [10]
3linear
networkreduction
(NR-PARS)
N-PARS V, I Y, I
radial structure
only
(or weakly-meshed using
PAWMS)
4 Y-PARS V, I Y [4]
5
back/forwardsweep
(BFS-PARS)
VI-VI-PARS V, I V, I
all except
type 4†
6 V-VI-PARS V V, I [18]
7 VI-I-PARS V, I I
8 V-I-PARS V I [23], [11]
9 VS-VS-PARS V, S V, S [3]
10 V-VS-PARS V V, S
11 VS-S-PARS V, S S
12 V-S-PARS V S [19], [20]
13
fast decoupled(DePARS)
VI-DePARS direct V, I [17], [32]
14 VS-DePARS direct V, S
15 I-DePARS V, I direct
16 S-DePARS V, S direct types 1, 5, 9‡ [12]
Ibus
Ybus
Sbus
V Ybus
V Ibus
–( ) ∗.*=

152
(8.2)
to zero and solving for the roots via Newton’s method.2 To be more accu-
rate, the set of equations given to Newton’s method consists of only the
rows of (8.2) associated with the load buses. Similarly, the unknowns are
the bus voltages at the load buses, since the source voltage is assumed to
be given.
8.1.2 Implicit Zbus Gauss Method
The Implicit Zbus Gauss method [27; 9; 10] also uses a standard
formulation. At all times, the state of a power system must satisfy
Kirchhoff’s current law at every bus. This constraint can be expressed as
(8.3)
where I is the vector of current injected by all constant current and con-
stant power elements. The voltage and current vectors are separated into
two parts, the first corresponding to the source and the second correspond-
ing to the remaining buses.
(8.4)
In this case, the power flow problem is to solve for , given the
source voltage . If the circuit contains no constant power elements, is
a known constant injection and can be found directly from the lower
part of (8.4).
(8.5)
2 See Table 6.1, “Newton’s Method”, on page 86.
F V( ) V YbusV Ibus–( ) ∗.* Sbus– 0= =
Ybus
I YbusV=
I1
I2
Y11 Y12
Y21 Y22
V1
V2
=
V2
V1 I2
V2
V2 Y221– I2 Y21V1–( )=
153
This is a simple linear circuit solution via a nodal method. If the network
contains constant power devices, they can be linearized by replacing them
with equivalent current injections based on an estimate of the bus volt-
ages. In this case, the current injection becomes a function of the bus
voltage vector .
(8.6)
The Gauss method can be applied to solve this equation by repeatedly
updating , evaluating the right hand side using the most recent value of
. When the change in between iterations is smaller than some toler-
ance the algorithm is terminated. This is called a “Zbus” method since it is
equivalent to repeatedly multiplying by the impedance matrix . In
practice, since this matrix is not sparse, it is not necessary or desirable to
explicitly form it, hence the “implicit” in the name of the algorithm.
Instead, is factored once via an LU decomposition and its factors are
stored. The evaluation of the right hand side of (8.6) then consists of com-
puting and doing a backward and forward substitution using the
factored matrix.
The primary differences between the implementation used for the
tests presented in this chapter and the version described in [9] and [10] are
the following. In this implementation, all constant impedance elements,
including transformers, shunt capacitors, and constant impedance loads,
are included in . It is possible to include transformers without encoun-
tering the ill-conditioning problems mentioned in [10] since this implemen-
tation is based on only solving for line-to-line voltages in ungrounded
sections of the network.
I2
V2
V2
Y22
1– I2
V2
( ) Y21
V1
–( )=
V2
V2 V2
Y221–
Y22
I2 V2( )
Ybus
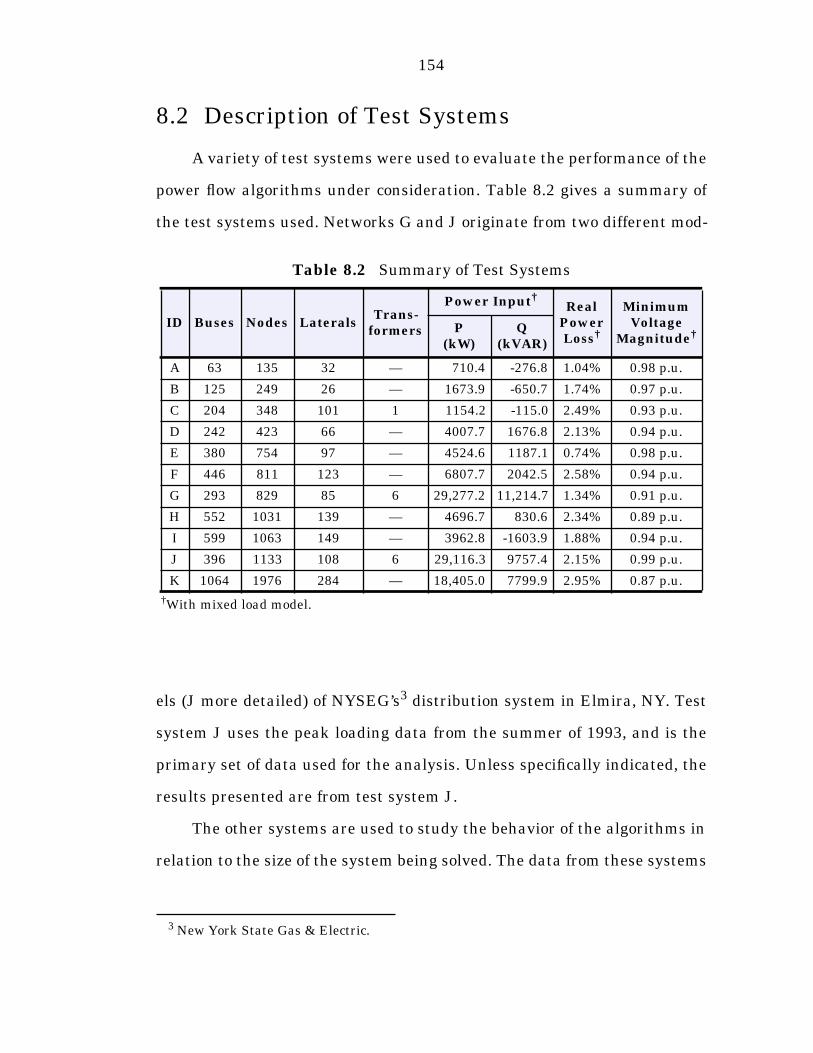
154
8.2 Description of Test Systems
A variety of test systems were used to evaluate the performance of the
power flow algorithms under consideration. Table 8.2 gives a summary of
the test systems used. Networks G and J originate from two different mod-
els (J more detailed) of NYSEG’s3 distribution system in Elmira, NY. Test
system J uses the peak loading data from the summer of 1993, and is the
primary set of data used for the analysis. Unless specifically indicated, the
results presented are from test system J.
The other systems are used to study the behavior of the algorithms in
relation to the size of the system being solved. The data from these systems
†With mixed load model.
3 New York State Gas & Electric.
Table 8.2 Summary of Test Systems
ID Buses Nodes LateralsTrans-
formers
Power Input†Real
PowerLoss†
MinimumVoltage
Magnitude†P(kW)
Q(kVAR)
A 63 135 32 — 710.4 -276.8 1.04% 0.98 p.u.
B 125 249 26 — 1673.9 -650.7 1.74% 0.97 p.u.
C 204 348 101 1 1154.2 -115.0 2.49% 0.93 p.u.
D 242 423 66 — 4007.7 1676.8 2.13% 0.94 p.u.
E 380 754 97 — 4524.6 1187.1 0.74% 0.98 p.u.
F 446 811 123 — 6807.7 2042.5 2.58% 0.94 p.u.
G 293 829 85 6 29,277.2 11,214.7 1.34% 0.91 p.u.
H 552 1031 139 — 4696.7 830.6 2.34% 0.89 p.u.
I 599 1063 149 — 3962.8 -1603.9 1.88% 0.94 p.u.
J 396 1133 108 6 29,116.3 9757.4 2.15% 0.99 p.u.
K 1064 1976 284 — 18,405.0 7799.9 2.95% 0.87 p.u.
155
are derived from models provided by Rochester Gas & Electric in NY.
Except for the tests which explicitly examine the effect of the load model,
all of the tests are run with a random mixture of approximately equal
numbers of constant PQ, constant current, and constant impedance loads.
8.3 Power Flow Algorithms for Radial Systems (PARS)
This section examines the performance of each of the power flow algo-
rithms described in this dissertation as applied to strictly radial systems.
As certain variations of the algorithms are found to be inferior, they are
then excluded from further tests and analysis.
First, consider a comparison of the number of iterations required by
the various algorithms to solve test systems B and J for a mixed load
model, as shown in Figure 8.1. With a few exceptions, the algorithms
require between about five and ten iterations to converge. The Newton-
Raphson method on average requires fewer iterations due to its quadratic
convergence property. The remaining algorithms exhibit what appears to
be linear convergence. Figure 8.2 illustrates this difference for a represen-
tative subset of the methods. It should be noted that the number of itera-
tions required by Implicit Zbus Gauss and N-PARS are always identical
since both methods solve the same linear approximation to the circuit at
each iteration.
Despite its superior performance with regard to number of iterations,
Figure 8.3 shows that the total number of flops required by the Newton-
Raphson method is approximately an order of magnitude greater, on aver-
age, than required by the remaining methods. In the network reduction
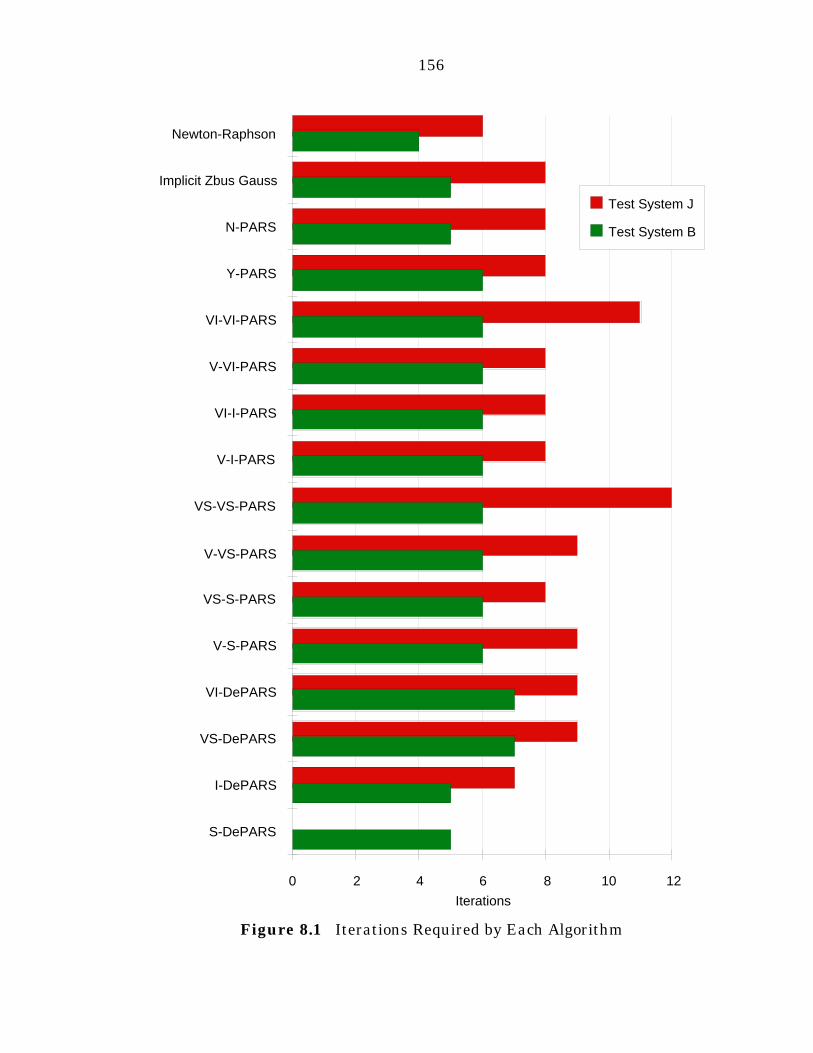
156
Figure 8.1 Iterations Required by Each Algorithm
Iterations
0 2 4 6 8 10 12
Newton-Raphson
Implicit Zbus Gauss
N-PARS
Y-PARS
VI-VI-PARS
V-VI-PARS
VI-I-PARS
V-I-PARS
VS-VS-PARS
V-VS-PARS
VS-S-PARS
V-S-PARS
VI-DePARS
VS-DePARS
I-DePARS
S-DePARS
Test System J
Test System B
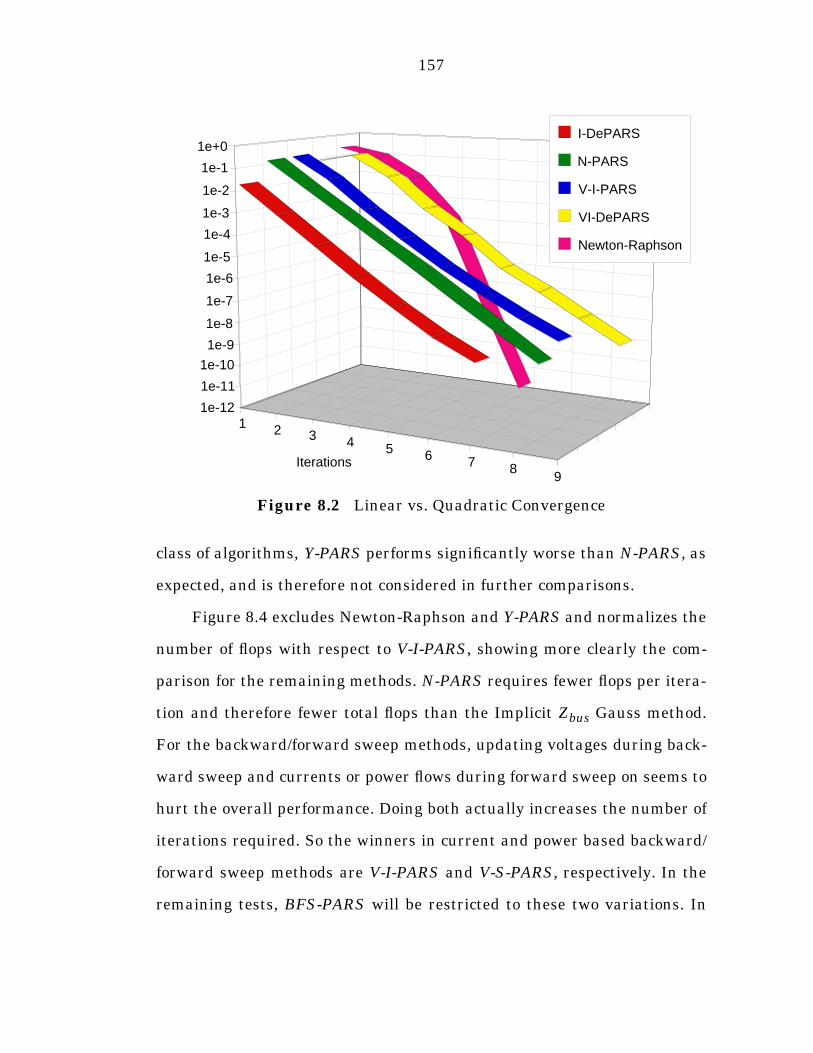
157
class of algorithms, Y-PARS performs significantly worse than N-PARS, as
expected, and is therefore not considered in further comparisons.
Figure 8.4 excludes Newton-Raphson and Y-PARS and normalizes the
number of flops with respect to V-I-PARS, showing more clearly the com-
parison for the remaining methods. N-PARS requires fewer flops per itera-
tion and therefore fewer total flops than the Implicit Zbus Gauss method.
For the backward/forward sweep methods, updating voltages during back-
ward sweep and currents or power flows during forward sweep on seems to
hurt the overall performance. Doing both actually increases the number of
iterations required. So the winners in current and power based backward/
forward sweep methods are V-I-PARS and V-S-PARS, respectively. In the
remaining tests, BFS-PARS will be restricted to these two variations. In
Figure 8.2 Linear vs. Quadratic Convergence
1 2 3 4 5 6 7 89
Iterations
1e-12
1e-11
1e-10
1e-9
1e-8
1e-7
1e-6
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0I-DePARS
N-PARS
V-I-PARS
VI-DePARS
Newton-Raphson
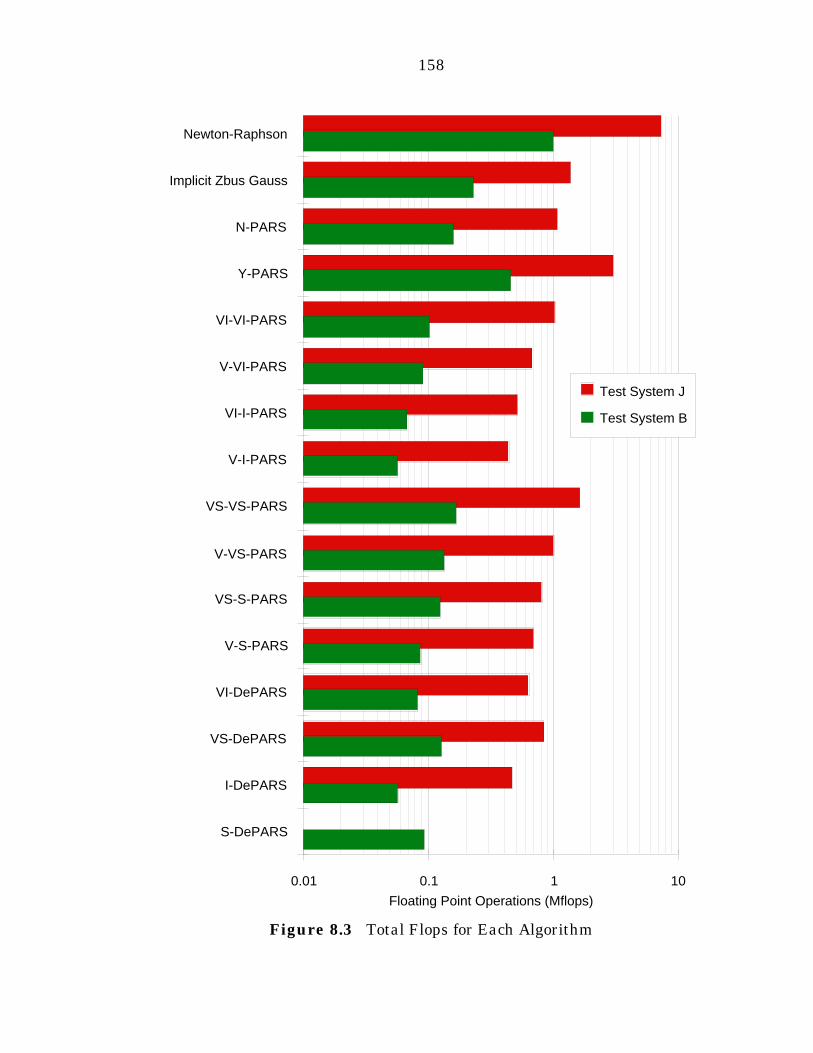
158
Figure 8.3 Total Flops for Each Algorithm
Floating Point Operations (Mflops)
0.01 0.1 1 10
Newton-Raphson
Implicit Zbus Gauss
N-PARS
Y-PARS
VI-VI-PARS
V-VI-PARS
VI-I-PARS
V-I-PARS
VS-VS-PARS
V-VS-PARS
VS-S-PARS
V-S-PARS
VI-DePARS
VS-DePARS
I-DePARS
S-DePARS
Test System J
Test System B
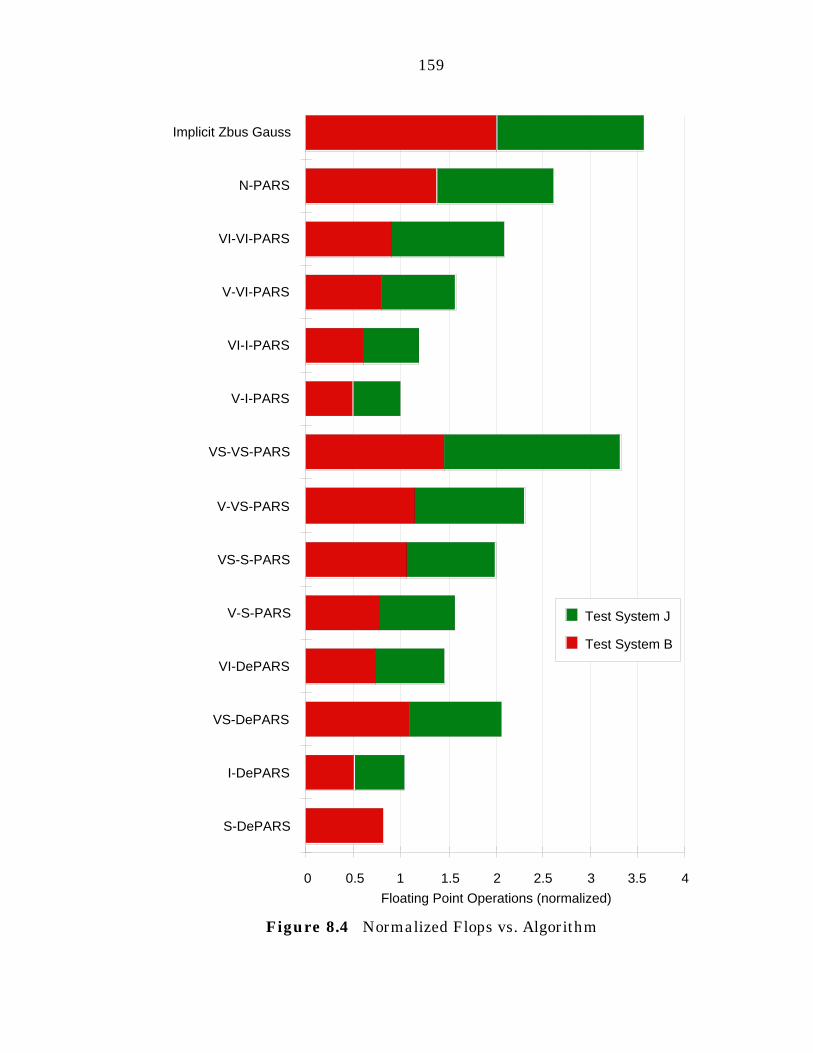
159
Figure 8.4 Normalized Flops vs. Algorithm
Floating Point Operations (normalized)
0 0.5 1 1.5 2 2.5 3 3.5 4
Implicit Zbus Gauss
N-PARS
VI-VI-PARS
V-VI-PARS
VI-I-PARS
V-I-PARS
VS-VS-PARS
V-VS-PARS
VS-S-PARS
V-S-PARS
VI-DePARS
VS-DePARS
I-DePARS
S-DePARS
Test System J
Test System B
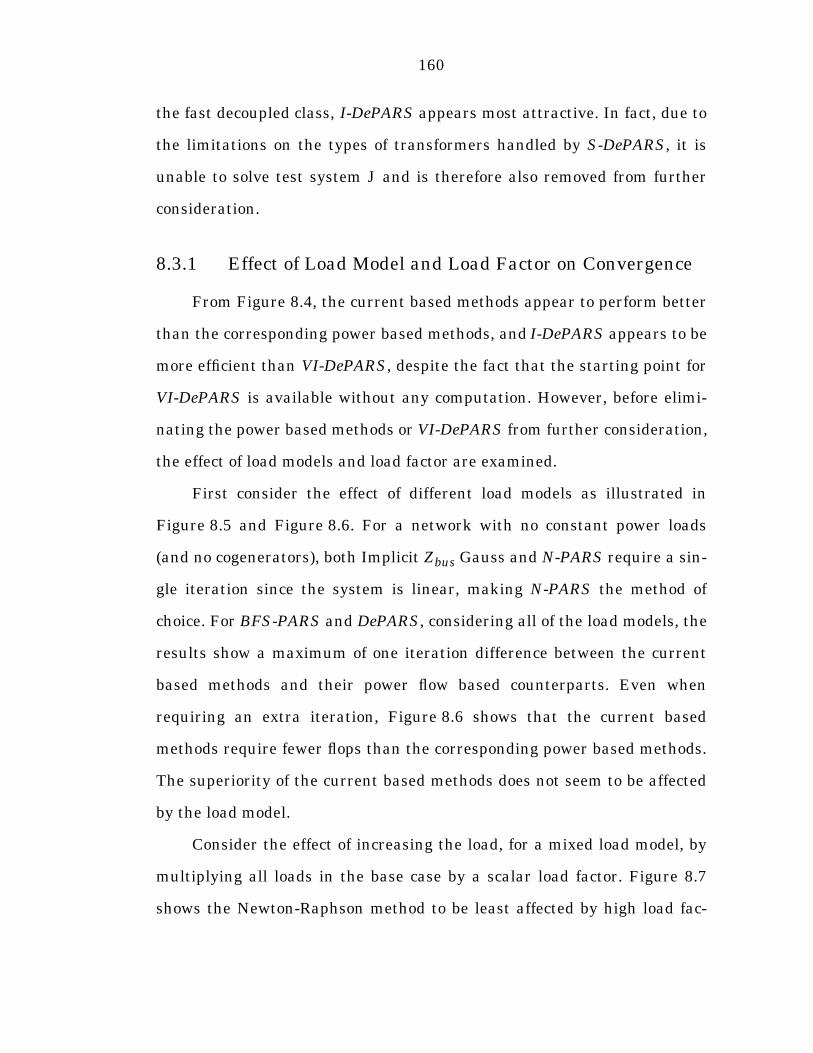
160
the fast decoupled class, I-DePARS appears most attractive. In fact, due to
the limitations on the types of transformers handled by S-DePARS, it is
unable to solve test system J and is therefore also removed from further
consideration.
8.3.1 Effect of Load Model and Load Factor on Convergence
From Figure 8.4, the current based methods appear to perform better
than the corresponding power based methods, and I-DePARS appears to be
more efficient than VI-DePARS, despite the fact that the starting point for
VI-DePARS is available without any computation. However, before elimi-
nating the power based methods or VI-DePARS from further consideration,
the effect of load models and load factor are examined.
First consider the effect of different load models as illustrated in
Figure 8.5 and Figure 8.6. For a network with no constant power loads
(and no cogenerators), both Implicit Zbus Gauss and N-PARS require a sin-
gle iteration since the system is linear, making N-PARS the method of
choice. For BFS-PARS and DePARS, considering all of the load models, the
results show a maximum of one iteration difference between the current
based methods and their power flow based counterparts. Even when
requiring an extra iteration, Figure 8.6 shows that the current based
methods require fewer flops than the corresponding power based methods.
The superiority of the current based methods does not seem to be affected
by the load model.
Consider the effect of increasing the load, for a mixed load model, by
multiplying all loads in the base case by a scalar load factor. Figure 8.7
shows the Newton-Raphson method to be least affected by high load fac-
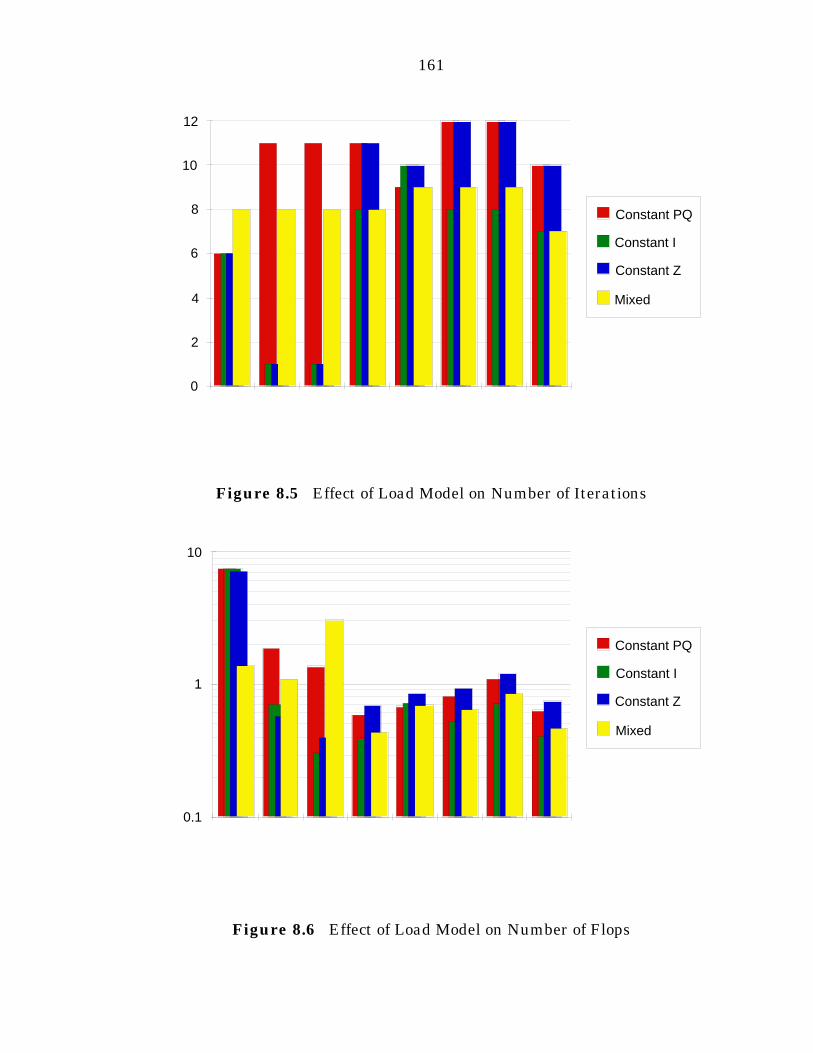
161
Figure 8.5 Effect of Load Model on Number of Iterations
Figure 8.6 Effect of Load Model on Number of Flops
0
2
4
6
8
10
12
Constant PQ
Constant I
Constant Z
Mixed
0.1
1
10
Constant PQ
Constant I
Constant Z
Mixed
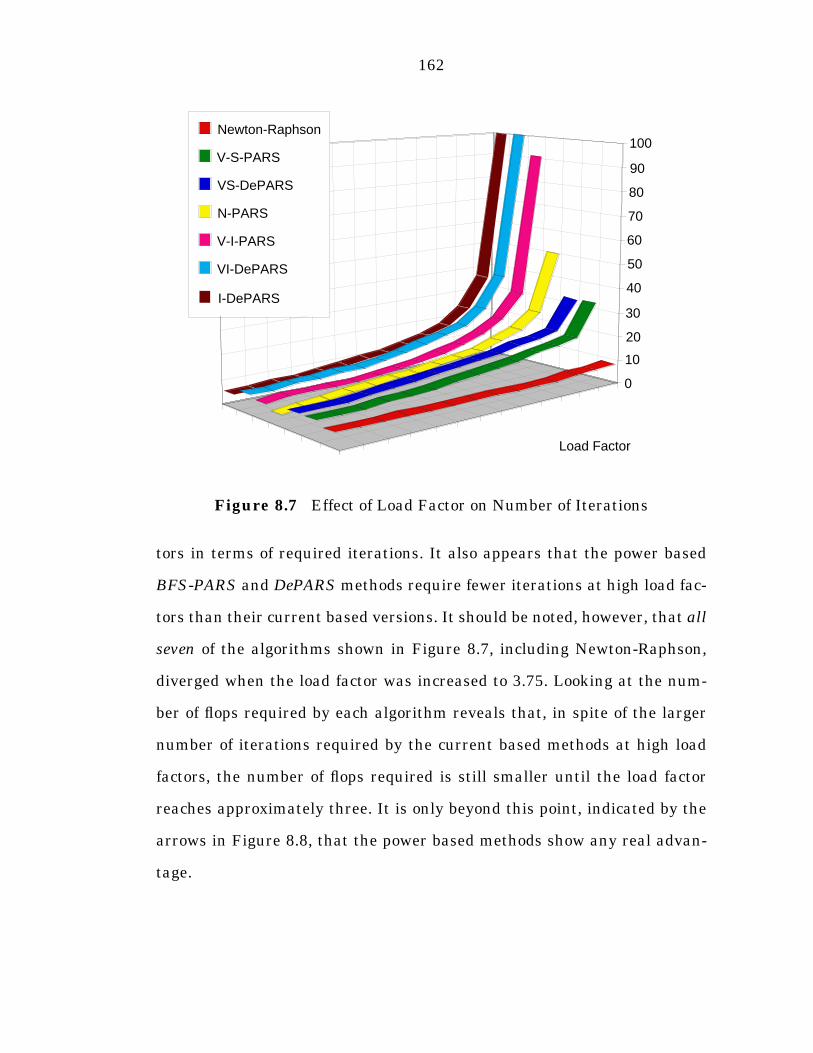
162
tors in terms of required iterations. It also appears that the power based
BFS-PARS and DePARS methods require fewer iterations at high load fac-
tors than their current based versions. It should be noted, however, that all
seven of the algorithms shown in Figure 8.7, including Newton-Raphson,
diverged when the load factor was increased to 3.75. Looking at the num-
ber of flops required by each algorithm reveals that, in spite of the larger
number of iterations required by the current based methods at high load
factors, the number of flops required is still smaller until the load factor
reaches approximately three. It is only beyond this point, indicated by the
arrows in Figure 8.8, that the power based methods show any real advan-
tage.
Figure 8.7 Effect of Load Factor on Number of Iterations
Load Factor
0
10
20
30
40
50
60
70
80
90
100Newton-Raphson
V-S-PARS
VS-DePARS
N-PARS
V-I-PARS
VI-DePARS
I-DePARS
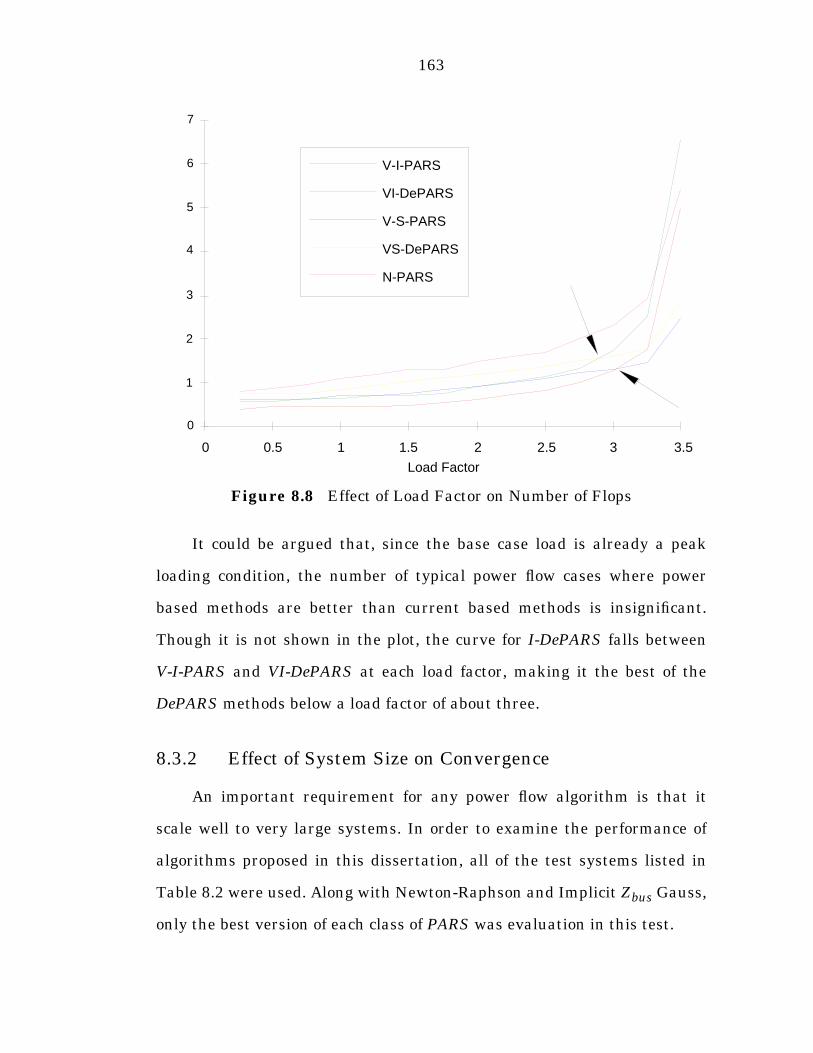
163
It could be argued that, since the base case load is already a peak
loading condition, the number of typical power flow cases where power
based methods are better than current based methods is insignificant.
Though it is not shown in the plot, the curve for I-DePARS falls between
V-I-PARS and VI-DePARS at each load factor, making it the best of the
DePARS methods below a load factor of about three.
8.3.2 Effect of System Size on Convergence
An important requirement for any power flow algorithm is that it
scale well to very large systems. In order to examine the performance of
algorithms proposed in this dissertation, all of the test systems listed in
Table 8.2 were used. Along with Newton-Raphson and Implicit Zbus Gauss,
only the best version of each class of PARS was evaluation in this test.
Figure 8.8 Effect of Load Factor on Number of Flops
Load Factor
0
1
2
3
4
5
6
7
0 0.5 1 1.5 2 2.5 3 3.5
V-I-PARS
VI-DePARS
V-S-PARS
VS-DePARS
N-PARS
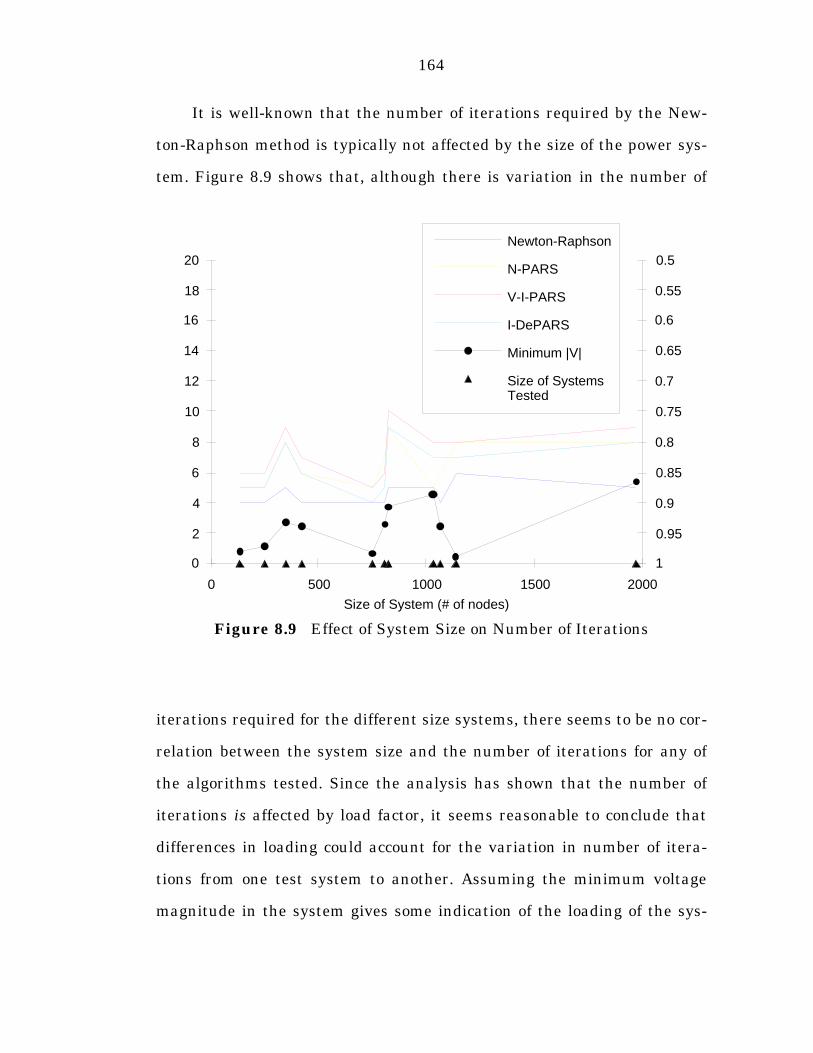
164
It is well-known that the number of iterations required by the New-
ton-Raphson method is typically not affected by the size of the power sys-
tem. Figure 8.9 shows that, although there is variation in the number of
iterations required for the different size systems, there seems to be no cor-
relation between the system size and the number of iterations for any of
the algorithms tested. Since the analysis has shown that the number of
iterations is affected by load factor, it seems reasonable to conclude that
differences in loading could account for the variation in number of itera-
tions from one test system to another. Assuming the minimum voltage
magnitude in the system gives some indication of the loading of the sys-
Figure 8.9 Effect of System Size on Number of Iterations
Size of System (# of nodes)
0
2
4
6
8
10
12
14
16
18
20
0 500 1000 1500 2000
0.5
0.55
0.6
0.65
0.7
0.75
0.8
0.85
0.9
0.95
1
Newton-Raphson
N-PARS
V-I-PARS
I-DePARS
Minimum |V|
Size of SystemsTested
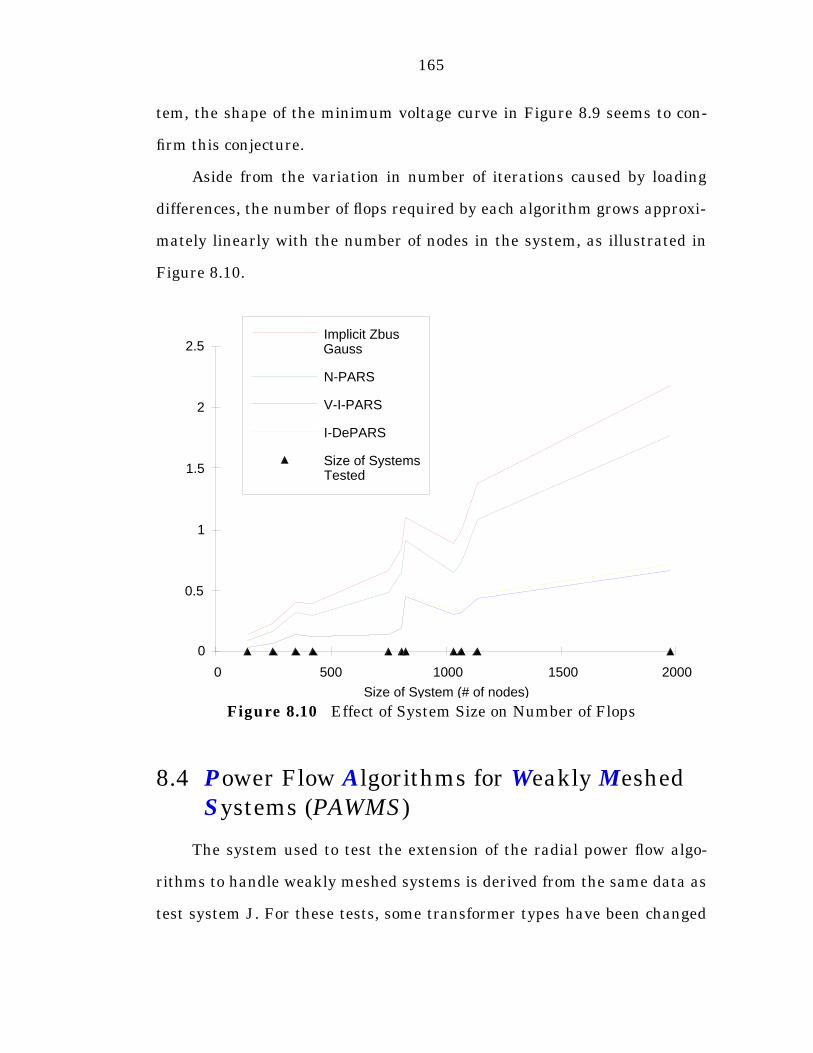
165
tem, the shape of the minimum voltage curve in Figure 8.9 seems to con-
firm this conjecture.
Aside from the variation in number of iterations caused by loading
differences, the number of flops required by each algorithm grows approxi-
mately linearly with the number of nodes in the system, as illustrated in
Figure 8.10.
8.4 Power Flow Algorithms for Weakly Meshed Systems (PAWMS)
The system used to test the extension of the radial power flow algo-
rithms to handle weakly meshed systems is derived from the same data as
test system J. For these tests, some transformer types have been changed
Figure 8.10 Effect of System Size on Number of FlopsSize of System (# of nodes)
0
0.5
1
1.5
2
2.5
0 500 1000 1500 2000
Implicit ZbusGauss
N-PARS
V-I-PARS
I-DePARS
Size of SystemsTested
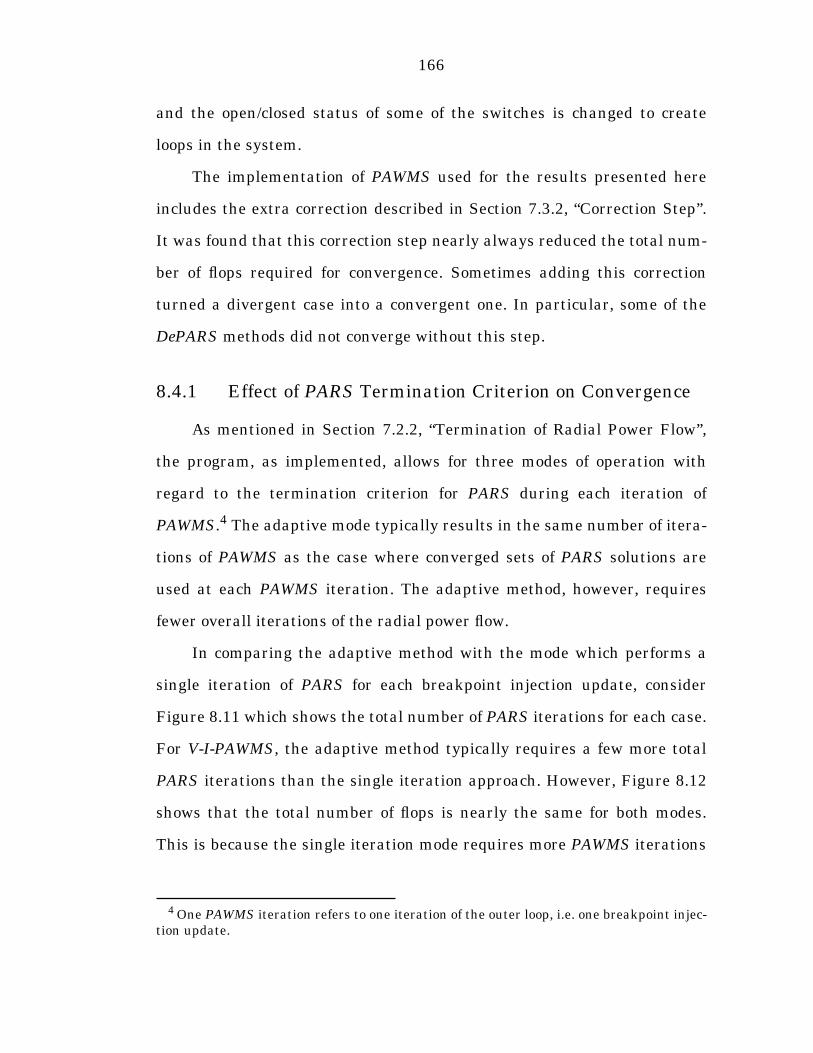
166
and the open/closed status of some of the switches is changed to create
loops in the system.
The implementation of PAWMS used for the results presented here
includes the extra correction described in Section 7.3.2, “Correction Step”.
It was found that this correction step nearly always reduced the total num-
ber of flops required for convergence. Sometimes adding this correction
turned a divergent case into a convergent one. In particular, some of the
DePARS methods did not converge without this step.
8.4.1 Effect of PARS Termination Criterion on Convergence
As mentioned in Section 7.2.2, “Termination of Radial Power Flow”,
the program, as implemented, allows for three modes of operation with
regard to the termination criterion for PARS during each iteration of
PAWMS.4 The adaptive mode typically results in the same number of itera-
tions of PAWMS as the case where converged sets of PARS solutions are
used at each PAWMS iteration. The adaptive method, however, requires
fewer overall iterations of the radial power flow.
In comparing the adaptive method with the mode which performs a
single iteration of PARS for each breakpoint injection update, consider
Figure 8.11 which shows the total number of PARS iterations for each case.
For V-I-PAWMS, the adaptive method typically requires a few more total
PARS iterations than the single iteration approach. However, Figure 8.12
shows that the total number of flops is nearly the same for both modes.
This is because the single iteration mode requires more PAWMS iterations
4 One PAWMS iteration refers to one iteration of the outer loop, i.e. one breakpoint injec-tion update.
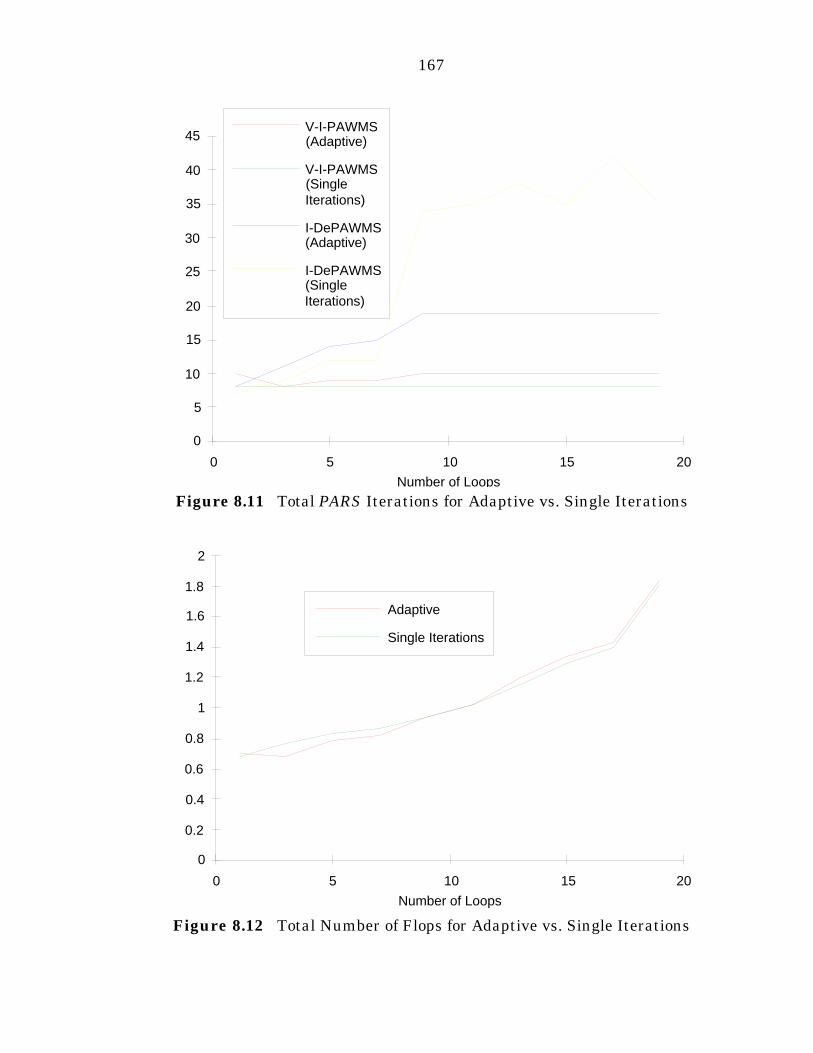
167
Figure 8.11 Total PARS Iterations for Adaptive vs. Single Iterations
Figure 8.12 Total Number of Flops for Adaptive vs. Single Iterations
Number of Loops
0
5
10
15
20
25
30
35
40
45
0 5 10 15 20
V-I-PAWMS(Adaptive)
V-I-PAWMS(SingleIterations)
I-DePAWMS(Adaptive)
I-DePAWMS(SingleIterations)
Number of Loops
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
0 5 10 15 20
Adaptive
Single Iterations
168
and therefore performs more correction steps than the adaptive mode. The
results for N-PAWMS and VI-DePAWMS are not shown, but are quite simi-
lar with a slightly higher number of flops required for the adaptive mode.
For I-DePAWMS, however, Figure 8.11 shows an enormous increase in
the number of PARS iterations required when the number of loops is
increased beyond about eight. This is due to an increase in the number of
PAWMS iterations caused by inaccurate breakpoint voltage mismatches
being used for the calculation of the breakpoint injection update. The num-
ber of required flops also increases dramatically. The adaptive mode does
not suffer from this problem since the breakpoint voltages are always
solved to the necessary precision.
The adaptive mode then is a “safer” approach, particularly for
I-DePAWMS, where the number of flops required is often significantly less
than for single iteration mode. For the other methods tested, N-PAWMS,
V-I-PAWMS, and VI-DePAWMS, the number of flops for the two modes are
typically comparable. For this reason, the adaptive mode is used through-
out the remaining tests.
8.4.2 Effect of Number of Loops on Convergence
As the number of loops in the network is increased, the number of
total radial power flow iterations typically settles to some constant num-
ber, as illustrated in Figure 8.13. The number of iterations required by the
Implicit Zbus Gauss method also settles on some constant. Figure 8.14
shows the relationship between the number of loops in the system and the
number of flops required for each algorithm. Although the number of itera-
tions stops growing with the number of loops, the number of flops does not.
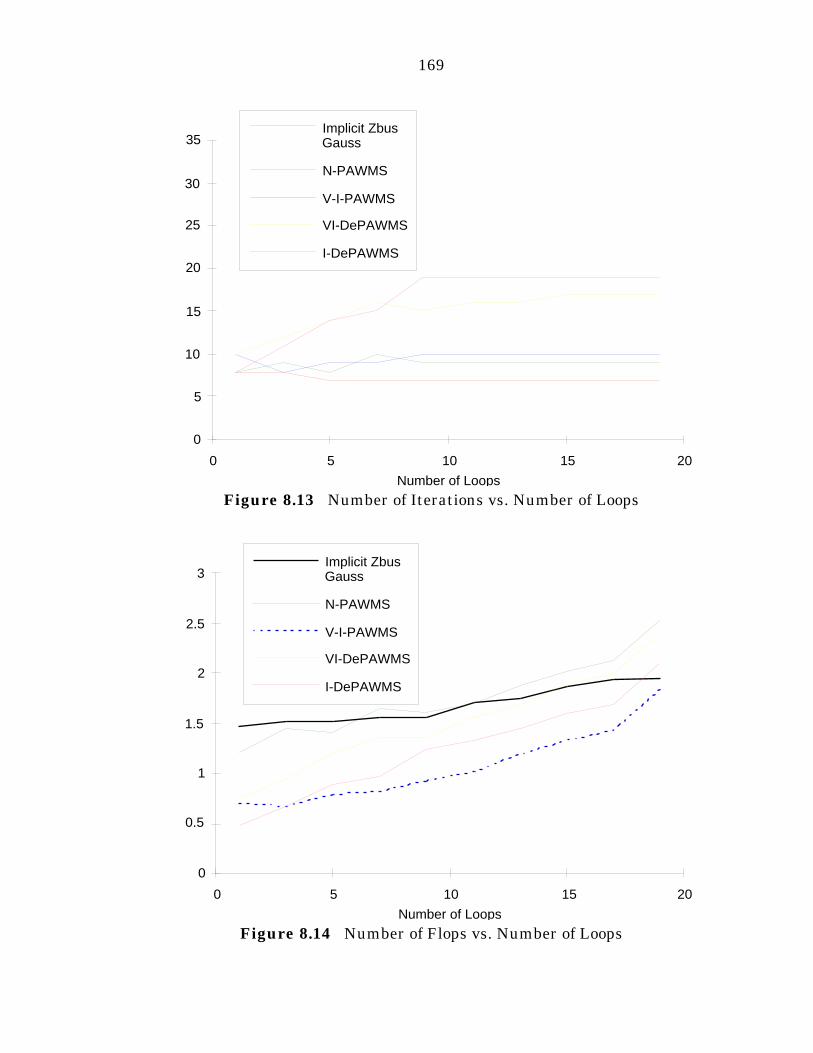
169
Figure 8.13 Number of Iterations vs. Number of Loops
Figure 8.14 Number of Flops vs. Number of Loops
Number of Loops
0
5
10
15
20
25
30
35
0 5 10 15 20
Implicit ZbusGauss
N-PAWMS
V-I-PAWMS
VI-DePAWMS
I-DePAWMS
Number of Loops
0
0.5
1
1.5
2
2.5
3
0 5 10 15 20
Implicit ZbusGauss
N-PAWMS
V-I-PAWMS
VI-DePAWMS
I-DePAWMS
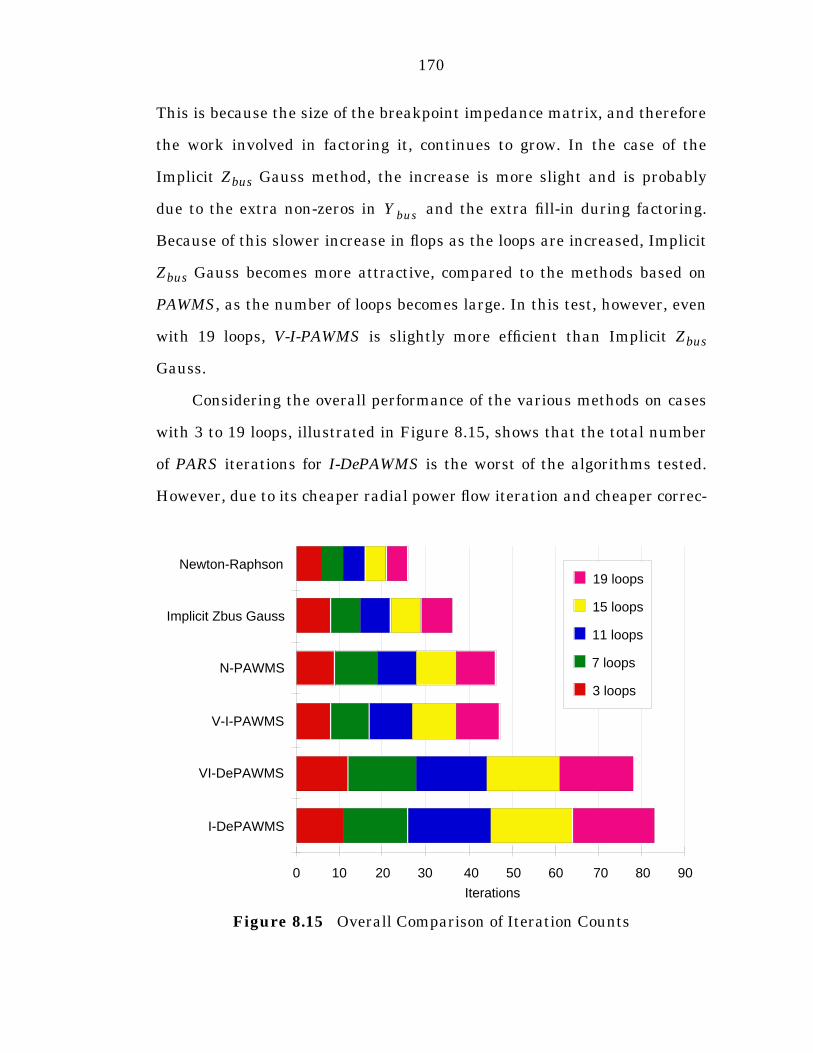
170
This is because the size of the breakpoint impedance matrix, and therefore
the work involved in factoring it, continues to grow. In the case of the
Implicit Zbus Gauss method, the increase is more slight and is probably
due to the extra non-zeros in and the extra fill-in during factoring.
Because of this slower increase in flops as the loops are increased, Implicit
Zbus Gauss becomes more attractive, compared to the methods based on
PAWMS, as the number of loops becomes large. In this test, however, even
with 19 loops, V-I-PAWMS is slightly more efficient than Implicit Zbus
Gauss.
Considering the overall performance of the various methods on cases
with 3 to 19 loops, illustrated in Figure 8.15, shows that the total number
of PARS iterations for I-DePAWMS is the worst of the algorithms tested.
However, due to its cheaper radial power flow iteration and cheaper correc-
Figure 8.15 Overall Comparison of Iteration Counts
Ybus
Iterations
0 10 20 30 40 50 60 70 80 90
Newton-Raphson
Implicit Zbus Gauss
N-PAWMS
V-I-PAWMS
VI-DePAWMS
I-DePAWMS
19 loops
15 loops
11 loops
7 loops
3 loops
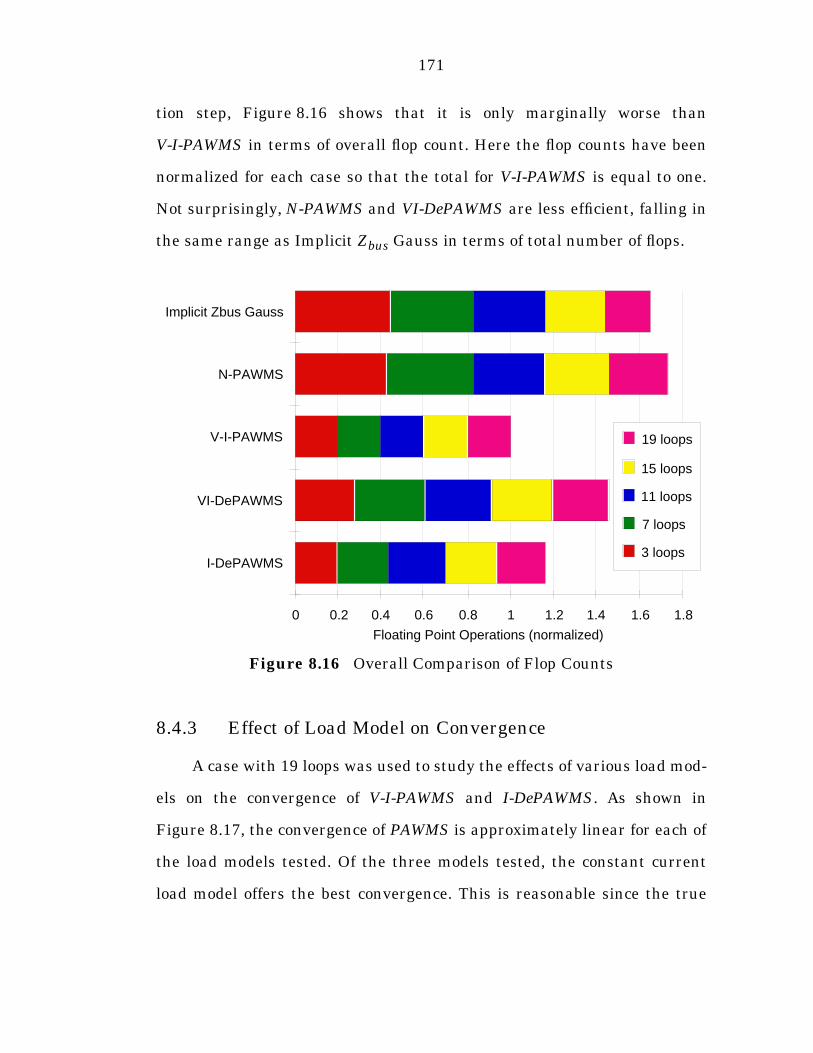
171
tion step, Figure 8.16 shows that it is only marginally worse than
V-I-PAWMS in terms of overall flop count. Here the flop counts have been
normalized for each case so that the total for V-I-PAWMS is equal to one.
Not surprisingly, N-PAWMS and VI-DePAWMS are less efficient, falling in
the same range as Implicit Zbus Gauss in terms of total number of flops.
8.4.3 Effect of Load Model on Convergence
A case with 19 loops was used to study the effects of various load mod-
els on the convergence of V-I-PAWMS and I-DePAWMS. As shown in
Figure 8.17, the convergence of PAWMS is approximately linear for each of
the load models tested. Of the three models tested, the constant current
load model offers the best convergence. This is reasonable since the true
Figure 8.16 Overall Comparison of Flop Counts
Floating Point Operations (normalized)
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8
Implicit Zbus Gauss
N-PAWMS
V-I-PAWMS
VI-DePAWMS
I-DePAWMS
19 loops
15 loops
11 loops
7 loops
3 loops
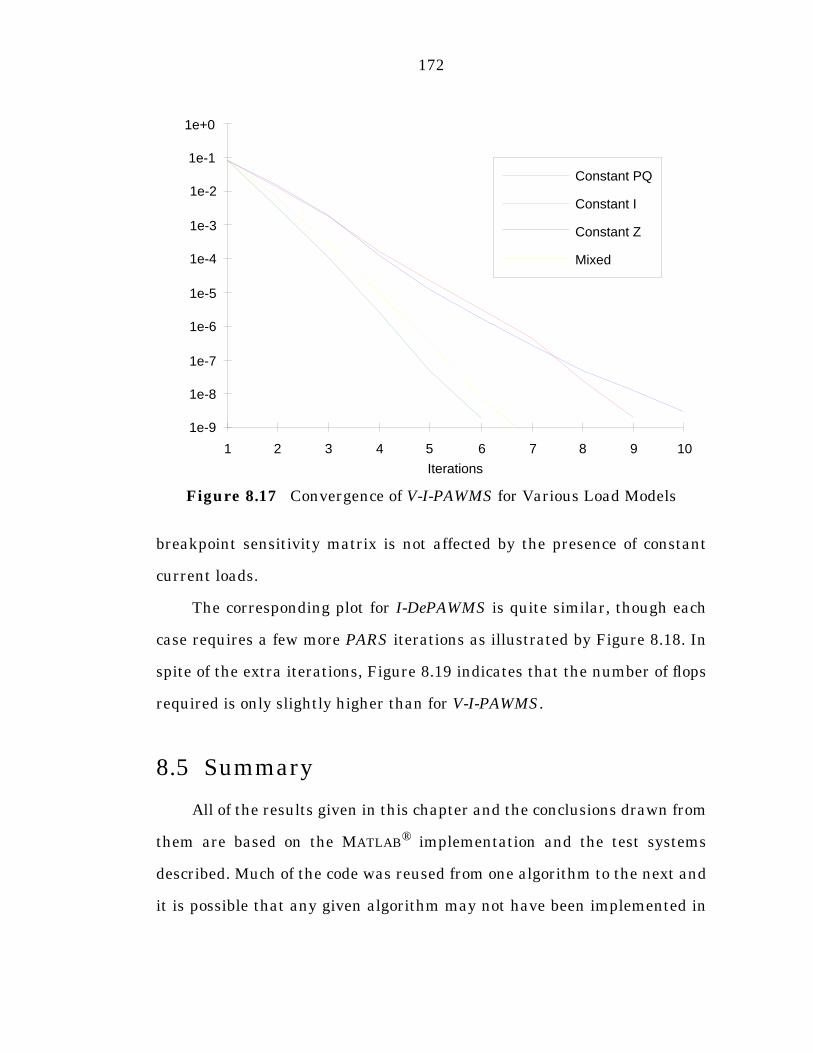
172
breakpoint sensitivity matrix is not affected by the presence of constant
current loads.
The corresponding plot for I-DePAWMS is quite similar, though each
case requires a few more PARS iterations as illustrated by Figure 8.18. In
spite of the extra iterations, Figure 8.19 indicates that the number of flops
required is only slightly higher than for V-I-PAWMS.
8.5 Summary
All of the results given in this chapter and the conclusions drawn from
them are based on the MATLAB® implementation and the test systems
described. Much of the code was reused from one algorithm to the next and
it is possible that any given algorithm may not have been implemented in
Figure 8.17 Convergence of V-I-PAWMS for Various Load Models
Iterations
1e-9
1e-8
1e-7
1e-6
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
1 2 3 4 5 6 7 8 9 10
Constant PQ
Constant I
Constant Z
Mixed
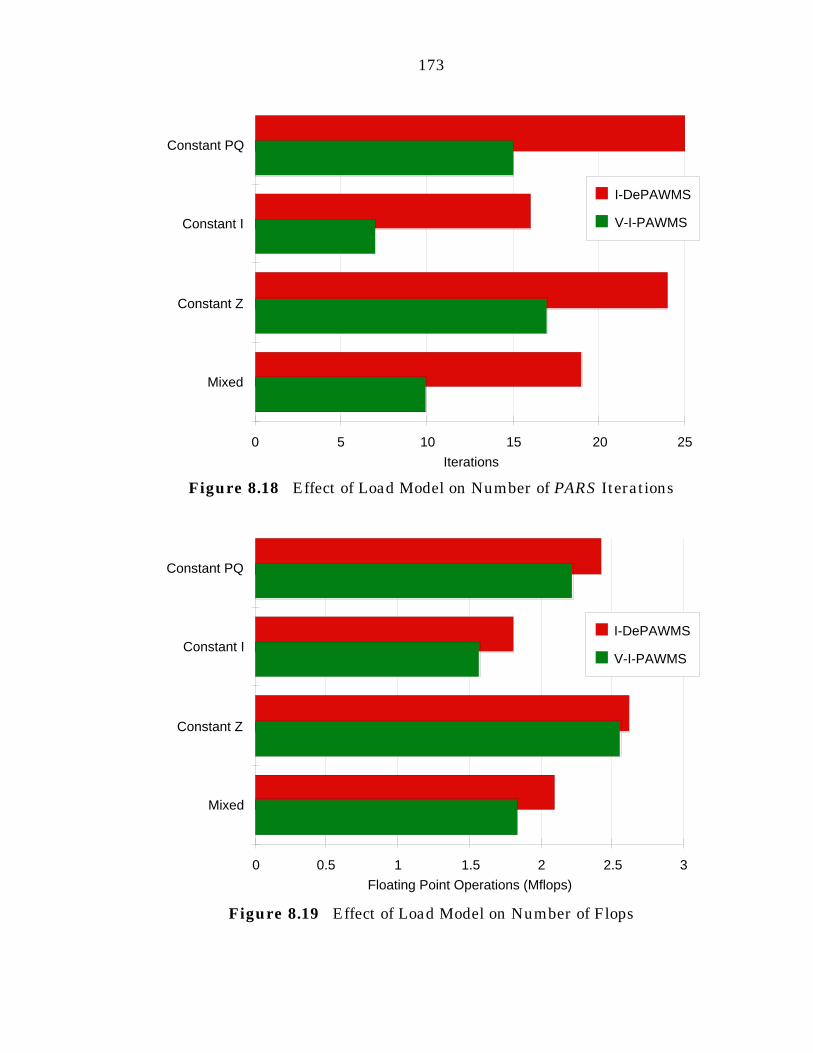
173
Figure 8.18 Effect of Load Model on Number of PARS Iterations
Figure 8.19 Effect of Load Model on Number of Flops
Iterations
0 5 10 15 20 25
Constant PQ
Constant I
Constant Z
Mixed
I-DePAWMS
V-I-PAWMS
Floating Point Operations (Mflops)
0 0.5 1 1.5 2 2.5 3
Constant PQ
Constant I
Constant Z
Mixed
I-DePAWMS
V-I-PAWMS
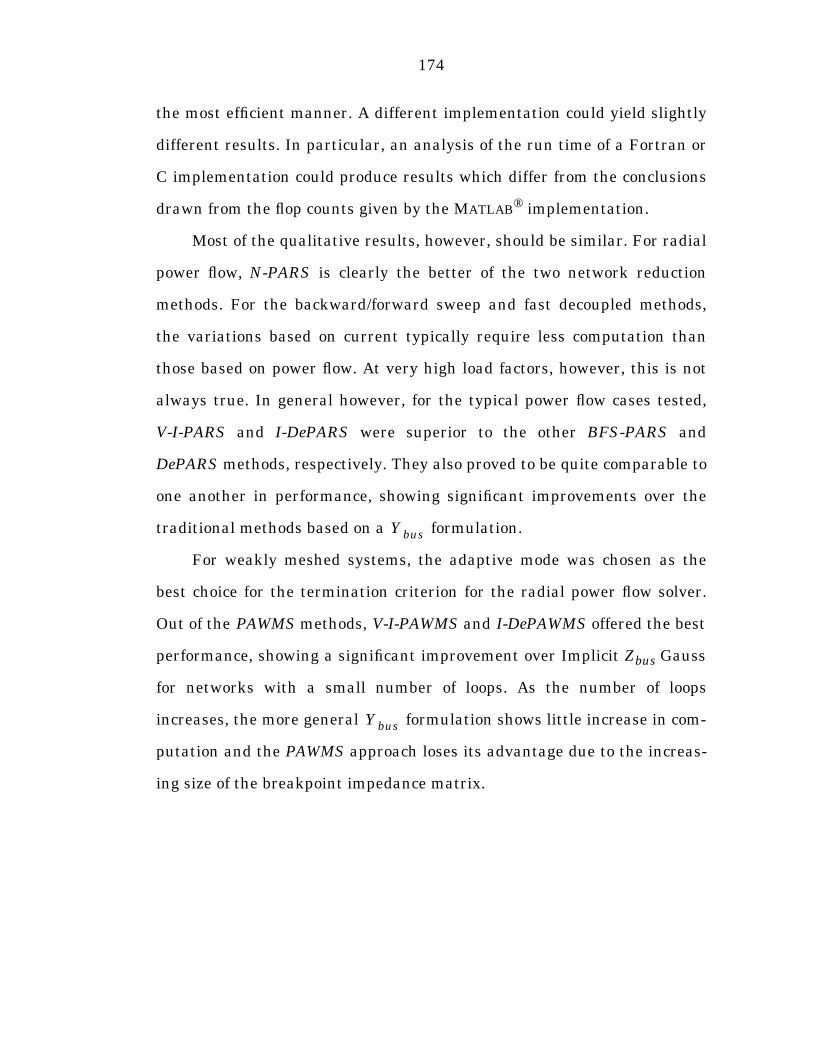
174
the most efficient manner. A different implementation could yield slightly
different results. In particular, an analysis of the run time of a Fortran or
C implementation could produce results which differ from the conclusions
drawn from the flop counts given by the MATLAB® implementation.
Most of the qualitative results, however, should be similar. For radial
power flow, N-PARS is clearly the better of the two network reduction
methods. For the backward/forward sweep and fast decoupled methods,
the variations based on current typically require less computation than
those based on power flow. At very high load factors, however, this is not
always true. In general however, for the typical power flow cases tested,
V-I-PARS and I-DePARS were superior to the other BFS-PARS and
DePARS methods, respectively. They also proved to be quite comparable to
one another in performance, showing significant improvements over the
traditional methods based on a formulation.
For weakly meshed systems, the adaptive mode was chosen as the
best choice for the termination criterion for the radial power flow solver.
Out of the PAWMS methods, V-I-PAWMS and I-DePAWMS offered the best
performance, showing a significant improvement over Implicit Zbus Gauss
for networks with a small number of loops. As the number of loops
increases, the more general formulation shows little increase in com-
putation and the PAWMS approach loses its advantage due to the increas-
ing size of the breakpoint impedance matrix.
Ybus
Ybus
175
Chapter 9
Conclusions
The objective of this work was to develop a comprehensive formula-
tion and an efficient solution algorithm for the distribution power flow
problem which takes into account the detailed and extensive modeling nec-
essary for use in the distribution automation environment of a real world
power system. This objective was achieved through extensions and gener-
alizations of existing power flow algorithms as well as through the develop-
ment of new methods.
9.1 Contributions
A general framework was developed which encompasses existing
radial power flow algorithms. This framework consists of the three main
classes of algorithms summarized in Table 9.1. Within each class, the
existing methods were generalized and extended to include more compre-
hensive modeling, and new algorithms for each class were introduced.
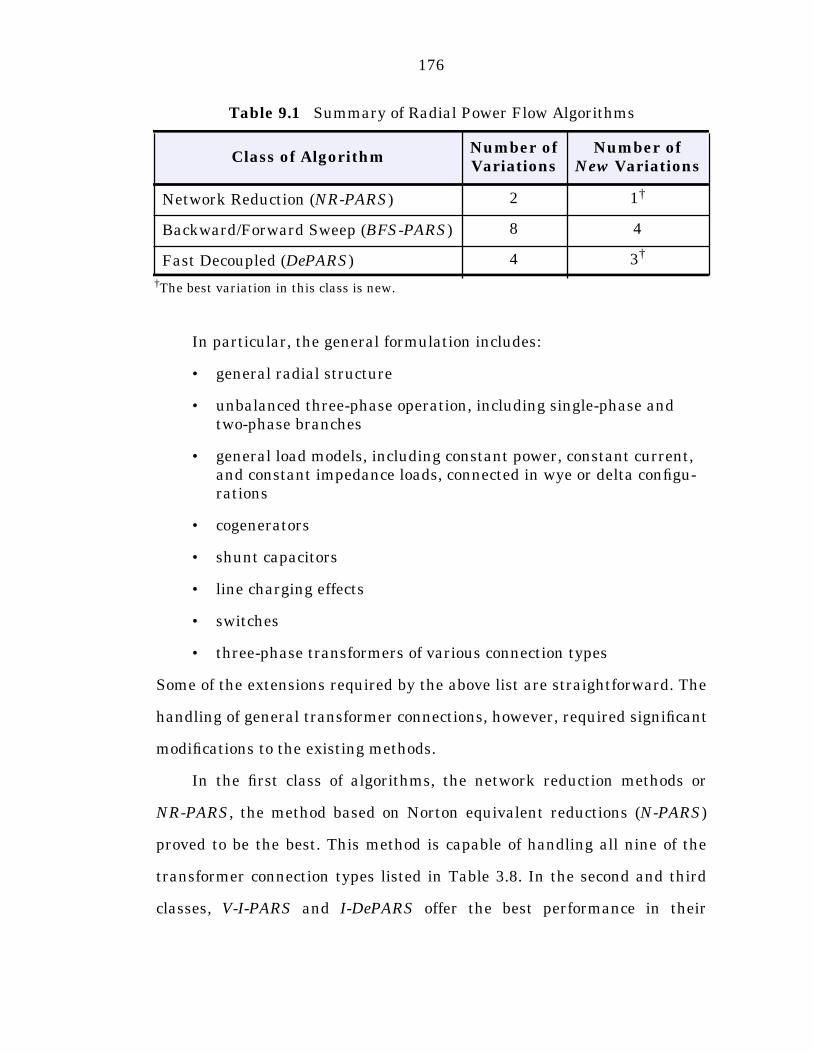
176
In particular, the general formulation includes:
• general radial structure
• unbalanced three-phase operation, including single-phase and two-phase branches
• general load models, including constant power, constant current, and constant impedance loads, connected in wye or delta configu-rations
• cogenerators
• shunt capacitors
• line charging effects
• switches
• three-phase transformers of various connection types
Some of the extensions required by the above list are straightforward. The
handling of general transformer connections, however, required significant
modifications to the existing methods.
In the first class of algorithms, the network reduction methods or
NR-PARS, the method based on Norton equivalent reductions (N-PARS)
proved to be the best. This method is capable of handling all nine of the
transformer connection types listed in Table 3.8. In the second and third
classes, V-I-PARS and I-DePARS offer the best performance in their
†The best variation in this class is new.
Table 9.1 Summary of Radial Power Flow Algorithms
Class of AlgorithmNumber ofVariations
Number of New Variations
Network Reduction (NR-PARS) 2 1†
Backward/Forward Sweep (BFS-PARS) 8 4
Fast Decoupled (DePARS) 4 3†
177
respective classes and have very similar computational requirements
which are significantly less than those of N-PARS. Both V-I-PARS and
I-DePARS, however, are restricted to systems which do not have any type 4
ungrounded wye to grounded wye transformer connections.
All three methods, N-PARS, V-I-PARS, and I-DePARS, require signifi-
cantly less computation than the traditional Newton-Raphson or Implicit
Zbus Gauss methods. Proofs of convergence have been given for the back-
ward/forward sweep and fast decoupled algorithms, indicating that they
are locally and linearly convergent. Furthermore, the simulation results
indicate that the number of iterations required for convergence is not a
function of the system size. Therefore, since the amount of work for each
iteration is proportional to the size of the system, the computational bur-
den of each algorithm grows only linearly with the size of the system, mak-
ing them suitable for very large distribution systems.
In order to solve weakly meshed systems, various extensions were
also made to the compensation method, previously applied only in conjunc-
tion with various backward/forward sweep methods. The general structure
proposed, with certain modeling restrictions, includes the following contri-
butions:
• general three-phase radial power flow
• general correction step
• secondary sources
• three-phase PV buses
• adaptive mode of radial power flow termination
178
Out of the PAWMS methods, V-I-PAWMS and I-DePAWMS offer the best
performance, showing a significant improvement over Implicit Zbus Gauss
for networks with a small number of loops.
9.2 Future Work
As with any work of research, there is always more that can be done.
Aside from further testing of the code and the algorithms as they stand,
there are several extensions and modifications which can be explored.
These include:
• expand network modeling
• remove limitations on formulation
• explore possibilities for improved contingency analysis
• implement for industry use
Though the modeling presented in this dissertation is quite general,
there are certainly improvements that can be made. As monitoring devices
become cheaper, more detailed information will become available on the
behavior of the components of a distribution system. In particular, with
more data it may be possible to use more accurate load models which are
not combinations of constant power, constant current, and constant imped-
ance. The inclusion of core loss in the transformer models is also important
for some applications, but was not included in this formulation due to a
lack of verifiable data. The automatic tap changes of voltage regulators
might also be considered.
Further extensions to the formulation of PAWMS could be explored as
well. In particular, it may be possible to extend the current formulation to
179
remove the limitations discussed in Section 7.2.1, making it possible to
handle systems with a mixture of grounded and ungrounded sections.
One common use of a power flow algorithm is to study various possi-
ble contingencies to determine the most profitable configuration for the
operation of the network. In such an application, the contingencies are typ-
ically specified with respect to some base case. If the power flow solution
for the base case is known, it may not be necessary to run a complete power
flow for each contingency. It is possible that the concepts behind the pro-
posed algorithms could be applied to compute partial or approximate
power flow solutions for the contingencies, given the base case solution.
The exploration of this possibility might yield more efficient approaches to
contingency analysis in distribution systems.
One of the most obvious ways of building upon the work presented in
this dissertation is to convert the MATLAB® program, used for the study of
the algorithms, to a compiled C or C++ program suitable for everyday use
in by a power engineer in industry. Such a program could be a very useful
tool for many applications in distribution planning and operation.
180
BIBLIOGRAPHY
[1] J. Arrillaga and C. P. Arnold, Computer Analysis of Power Systems,John Wiley & Sons, 1990.
[2] J. Arrillaga, C. P. Arnold, and B. J. Harker, Computer Modelling ofElectrical Power Systems, John Wiley & Sons, 1983.
[3] M. E. Baran and F. F. Wu, “Optimal Sizing of Capacitors Placed on aRadial Distribution System”, IEEE Transactions on Power Delivery,Vol. 4, No. 1, January 1989, pp. 735-742.
[4] R. Berg, Jr., E. S. Hawkins, and W. W. Pleines, “MechanizedCalculation of Unbalanced Load Flow on Radial DistributionCircuits”, IEEE Transactions on Power Apparatus and Systems,Vol. PAS-86, No. 4, April 1967, pp. 415-421.
[5] A. R. Bergen, Power Systems Analysis, Prentice-Hall, EnglewoodCliffs, NJ, 1986.
[6] H. E. Brown, G. K. Carter, H. H. Happ, C. E. Person, “Power FlowSolution by Impedance Matrix Iterative Method”, IEEE Transactionson Power Apparatus and Systems, Vol. PAS-82, April 1963, pp. 1-10.
[7] H. E. Brown, G. K. Carter, H. H. Happ, C. E. Person, “Z-MatrixAlgorithms in Load-Flow Programs”, IEEE Transactions on PowerApparatus and Systems, Vol. PAS-87, No. 3, March 1968, pp. 807-814.
[8] M. S. Chen and W. E. Dillon, “Power System Modeling”, Proceedingsof the IEEE, Vol. 62, No. 7, July 1974, pp. 901-915.
[9] T. H. Chen, M. S. Chen, K. J. Hwang, P. Kotas, and E. Chebli,“Distribution System Power Flow Analysis - A Rigid Approach”, IEEETransactions on Power Delivery, Vol. 6, No. 3, July 1991, pp. 1146-1152.
[10] T. H. Chen, “Generalized Distribution Analysis System”, Ph.D.Dissertation, The University of Texas at Arlington, May 1990.
[11] C. S. Cheng and D. Shirmohammadi, “A Three-Phase Power FlowMethod for Real-Time Distribution System Analysis”, IEEE/PES1994 Summer Meeting, San Francisco, CA, July 1994,94 SM 603-1 PWRS.
181
[12] H. D. Chiang, “A Decoupled Load Flow Method for Distribution PowerNetworks: Algorithms, Analysis and Convergence Study”, ElectricalPower & Energy Systems, Vol. 13, No. 3, June 1991, pp. 130-138.
[13] H. D. Chiang and M. E. Baran, “On the Existence and Uniqueness ofLoad Flow Solution for Radial Distribution Power Networks”, IEEETransactions on Circuits and Systems, Vol. 37, No. 3, March 1990,pp. 410-416.
[14] R. S. Dembo, S. C. Eisenstat, and T. Steihaug, “Inexact NewtonMethods”, SIAM Journal on Numerical Analysis, Vol. 19, No. 2, April1982, pp. 400-408.
[15] G. H. Golub and C. F. Van Loan, Matrix Computations, The JohnsHopkins University Press, Baltimore, MD, 1989.
[16] S. Iwamoto and Y. Tamura, “A Load Flow Calculation Method for Ill-Conditioned Power Systems”, IEEE Transactions on Power Apparatusand Systems, Vol. PAS-100, No. 4, April 1981, pp. 1736-1743.
[17] W. H. Kersting and D. L. Mendive, “An Application of Ladder NetworkTheory to the Solution of Three-Phase Radial Load-Flow Problems”,IEEE/PES 1976 Winter Meeting, New York, NY, January 1976,A 76 044-8.
[18] W. H. Kersting and W. H. Phillips, “A Radial Three-phase Power FlowProgram for the PC”, Conference paper, presented at 1987 FrontiersPower Conference, Stillwater, OK, October 1987.
[19] G.X. Luo and A. Semlyen, “Efficient Load Flow for Large WeaklyMeshed Networks”, IEEE Transactions on Power Systems, Vol. 5,No. 4, November 1990, pp. 1309-1316.
[20] D. Raji i , R. A kovski, R. Taleski, “Voltage Correction Power Flow”,IEEE/PES 1993 Summer Meeting, Vancouver, B.C., Canada, July1993, 93 SM 570-2.
[21] D. Raji i and A. Bose, “A Modification to the Fast Decoupled PowerFlow for Networks with High R/X Ratios”, IEEE Transactions onPower Systems, Vol. 3, No. 2, May 1988, pp. 743-746.
[22] R. Sedgewick, Algorithms, Addison-Wesley Publishing Company, Inc.,1983.
c c c
c c
182
[23] D. Shirmohammadi, H. W. Hong, A. Semlyen, and G. X. Luo, “ACompensation-based Power Flow Method for Weakly MeshedDistribution and Transmission Networks”, IEEE Transactions onPower Systems, Vol. 3, No. 2, May 1988, pp. 753-762.
[24] G. W. Stagg and A. H. El-Abiad, Computer Methods in Power SystemAnalysis, New York: McGraw Hill, 1968.
[25] B. Stott, “Review of Load-Flow Calculation Methods”, Proceedings ofthe IEEE, Vol. 62, No. 7, July 1974, pp. 916-929.
[26] B. Stott and O. Alsaç, “Fast Decoupled Load Flow”, IEEETransactions on Power Apparatus and Systems, Vol. PAS-93, May/June 1974, pp. 859-869.
[27] D. I. H. Sun, S. Abe, R. R. Shoults, M. S. Chen, P. Eichenberger, andD. Farris, “Calculation of Energy Losses in a Distribution System”,IEEE Transactions on Power Apparatus and Systems, Vol. PAS-99,No. 4, July/August 1980, pp. 1347-1356.
[28] W. F. Tinney and C. E. Hart, “Power Flow Solution by Newton’sMethod”, IEEE Transactions on Power Apparatus and Systems,Vol. PAS-86, No. 11, November 1967, pp. 1449-1460.
[29] W. F. Tinney and J. W. Walker, “Direct Solutions of Sparse NetworkEquations by Optimally Ordered Triangular Factorization”,Proceedings of the IEEE, Vol. 55, No. 11, November 1967, pp. 1801-1809.
[30] W. F. Tinney, “Compensation Methods for Network Solutions byOptimally Ordered Triangular Factorization”, Proceedings of thePICA Conference, Boston, MA, May 24-26, 1971, pp. 123-127.
[31] S. C. Tripathy, G. D. Prasad, O. P. Malik, and G. S. Hope, “Load FlowSolutions for Ill-Conditioned Power Systems by a Newton-LikeMethod”, IEEE Transactions on Power Apparatus and Systems,Vol. PAS-101, No. 10, October 1982, pp. 3648-3657.
[32] R. D. Zimmerman and H. D. Chiang, “Fast Decoupled Power Flow forUnbalanced Radial Distribution Systems”, IEEE/PES 1995 WinterMeeting, New York, NY, January 1995, 95 WM 219-6 PWRS.