Complementary Limb Motion Estimation for the … · Control of Active Knee Prostheses Heike...
6
Biomed Tech 2011, vol. 56, no. 1, pp. 45-51. DOI 10.1515/BMT.2010.057. Author’s version Complementary Limb Motion Estimation for the Control of Active Knee Prostheses Heike Vallery 1,2 , Rainer Burgkart 3 , Cornelia Hartmann 4 , J¨ urgen Mitternacht 3 , Robert Riener 1,2 , Martin Buss 5 Abstract—To restore walking after transfemoral ampu- tation, various actuated exoprostheses have been devel- oped, which control the knee torque actively or via variable damping. In both cases, an important issue is to find the appropriate control that enables user-dominated gait. Re- cently, we suggested a generic method to deduce intended motion of impaired or amputated limbs from residual human body motion. Based on interjoint coordination in physiological gait, statistical regression is used to estimate missing motion. In a pilot study, this Complementary Limb Motion Estimation (CLME) strategy is applied to control an active knee exoprosthesis. A motor-driven prosthetic knee with one Degree of Freedom has been realized, and one above-knee amputee has used it with CLME. Performed tasks are walking on a treadmill and alternating stair ascent and descent. The subject was able to walk on the treadmill at varying speeds, but needed assistance with the stairs, especially to descend. The promising results with CLME are compared to the subject’s performance with her own prosthesis, the C-Leg from Otto Bock. Keywords Active Prostheses, Intention Estimation, User-Cooperative Control I. I NTRODUCTION Physiological human gait is a continuous control process, which allows adaptation to almost arbitrary environments on the basis of a broad experience. Human capabilities in the coordination of movements still outperform biped robots by far. After the loss of a leg due to amputation, the motor system is generally still capable of these complex control tasks, and the ideal of a prosthetic solution would be a seamless integration into the sensorimotor control loop. On this way, there are two challenges: One is to realize a portable hardware solution that is capable of generating the same forces 1 Sensory-Motor Systems (SMS) Lab, Institute of Robotics and Intelligent Systems (IRIS), ETH Zurich, 2 Medical Faculty, Bal- grist University Hospital, University of Zurich, Switzerland, 3 Klinik f¨ ur Orthop¨ adie und Unfallchirurgie, Klinikum r.d. Isar, Technische Universit¨ at M¨ unchen, Germany, 4 Otto Bock HealthCare GmbH, Germany, 5 Institute of Automatic Control Engineering, Technische Universit¨ at M¨ unchen, Germany. Corresponding Author Contact Information: Heike Vallery, Phone: +41 44 632 42 70, Fax: +41 44 632 18 76, E-Mail: [email protected] and movements as a human leg. The second challenge is to interface the prosthesis with the human controller. The first hardware solutions were passive mechanical joints. Using monocentric and later polycentric knee joints, stable stance and also knee flexion during swing were possible. A major advance was marked by the development of adaptively damped devices, namely the C-Leg (Otto Bock HealthCare GmbH, Duderstadt, Germany) and the Rheo Knee ( ¨ Ossur Inc., Reykjav´ ık, Iceland). These systems exploit the fact that knee joint power during physiological gait is mainly negative, meaning that the muscles are predominantly active to decelerate and to absorb energy. With very little power supply, microprocessor-controlled fluidic dampers can adapt the viscous torque according to the current gait phase, enabling a near-normal gait pattern. Microprocessor-controlled joints show biomechanical advantages compared to passive mechan- ical joints, like smoother gait and less compensatory hip activity on the contralateral side [18]. Furthermore, they show an improved behavior when descending stairs and negotiating rough terrain, and they can reduce the risk of stumbling and falls [17]. However, knee joint power is low during gait, but it is not zero. Thus, purely dissipative devices are still a compromise and cannot enable fully physiological gait. Furthermore, they do not allow movements that intrinsically depend on positive knee power, like alternating stair ascent. Powered prostheses are becoming more popular, but they pose considerable engi- neering challenges, mainly due to power and energy require- ments. Early experimental platforms are therefore tethered, like the hydraulic knee prosthesis presented in [8], or they have a limited range, like the battery-powered prosthesis with electrical motors presented in [23]. Recent developments in actuator and energy storage technology can alleviate the prob- lem of weight and range (see e.g. [11]). The only commercial device is the Power Knee from ¨ Ossur and Victhom Human Bionics, Canada. However, there are various systems in a research stage, like a pneumatic prosthesis [26], a prosthetic knee with Series Elastic Actuation [21], and a hybrid concept that combines dissipative and active elements using hydraulics and an electric pump [20]. Given controlled dissipative or active platforms, many options open up for control design. However, the integration into the human control apparatus is challenging. Current exoprosthetic controllers exhibit a high degree of intelligence: They work with sophisticated rules [24], gait- phase dependent damping like the C-Leg (Otto Bock) or c 2011 by Walter de Gruyter, Berlin, New York
Transcript of Complementary Limb Motion Estimation for the … · Control of Active Knee Prostheses Heike...

Biomed Tech 2011, vol. 56, no. 1, pp. 45-51. DOI 10.1515/BMT.2010.057.Author’s version
Complementary Limb Motion Estimation for theControl of Active Knee Prostheses
Heike Vallery1,2, Rainer Burgkart3, Cornelia Hartmann4, Jurgen Mitternacht3, RobertRiener1,2, Martin Buss5
Abstract—To restore walking after transfemoral ampu-tation, various actuated exoprostheses have been devel-oped, which control the knee torque actively or via variabledamping. In both cases, an important issue is to find theappropriate control that enables user-dominated gait. Re-cently, we suggested a generic method to deduce intendedmotion of impaired or amputated limbs from residualhuman body motion. Based on interjoint coordination inphysiological gait, statistical regression is used to estimatemissing motion. In a pilot study, this Complementary LimbMotion Estimation (CLME) strategy is applied to controlan active knee exoprosthesis. A motor-driven prostheticknee with one Degree of Freedom has been realized,and one above-knee amputee has used it with CLME.Performed tasks are walking on a treadmill and alternatingstair ascent and descent. The subject was able to walk onthe treadmill at varying speeds, but needed assistance withthe stairs, especially to descend. The promising results withCLME are compared to the subject’s performance withher own prosthesis, the C-Leg from Otto Bock.
KeywordsActive Prostheses, Intention Estimation, User-CooperativeControl
I. I NTRODUCTION
Physiological human gait is a continuous control process,which allows adaptation to almost arbitrary environments onthe basis of a broad experience. Human capabilities in thecoordination of movements still outperform biped robots byfar. After the loss of a leg due to amputation, the motorsystem is generally still capable of these complex controltasks, and the ideal of a prosthetic solution would be aseamless integration into the sensorimotor control loop. Onthis way, there are two challenges: One is to realize a portablehardware solution that is capable of generating the same forces
1Sensory-Motor Systems (SMS) Lab, Institute of Robotics andIntelligent Systems (IRIS), ETH Zurich,2Medical Faculty, Bal-grist University Hospital, University of Zurich, Switzerland,3Klinikfur Orthopadie und Unfallchirurgie, Klinikum r.d. Isar, TechnischeUniversitat Munchen, Germany,4Otto Bock HealthCare GmbH,Germany,5Institute of Automatic Control Engineering, TechnischeUniversitat Munchen, Germany.Corresponding Author ContactInformation: Heike Vallery, Phone: +41 44 632 42 70, Fax: +41 44632 18 76, E-Mail: [email protected]
and movements as a human leg. The second challenge is tointerface the prosthesis with the human controller.
The first hardware solutions were passive mechanical joints.Using monocentric and later polycentric knee joints, stablestance and also knee flexion during swing were possible. Amajor advance was marked by the development of adaptivelydamped devices, namely the C-Leg (Otto Bock HealthCareGmbH, Duderstadt, Germany) and the Rheo Knee (OssurInc., Reykjavık, Iceland). These systems exploit the factthat knee joint power during physiological gait is mainlynegative, meaning that the muscles are predominantly activeto decelerate and to absorb energy. With very little powersupply, microprocessor-controlled fluidic dampers can adaptthe viscous torque according to the current gait phase, enablinga near-normal gait pattern. Microprocessor-controlled jointsshow biomechanical advantages compared to passive mechan-ical joints, like smoother gait and less compensatory hipactivity on the contralateral side [18]. Furthermore, theyshowan improved behavior when descending stairs and negotiatingrough terrain, and they can reduce the risk of stumbling andfalls [17].
However, knee joint power is low during gait, but it is notzero. Thus, purely dissipative devices are still a compromiseand cannot enable fully physiological gait. Furthermore, theydo not allow movements that intrinsically depend on positiveknee power, like alternating stair ascent. Powered prosthesesare becoming more popular, but they pose considerable engi-neering challenges, mainly due to power and energy require-ments. Early experimental platforms are therefore tethered,like the hydraulic knee prosthesis presented in [8], or theyhave a limited range, like the battery-powered prosthesis withelectrical motors presented in [23]. Recent developments inactuator and energy storage technology can alleviate the prob-lem of weight and range (see e.g. [11]). The only commercialdevice is the Power Knee fromOssur and Victhom HumanBionics, Canada. However, there are various systems in aresearch stage, like a pneumatic prosthesis [26], a prostheticknee with Series Elastic Actuation [21], and a hybrid conceptthat combines dissipative and active elements using hydraulicsand an electric pump [20].
Given controlled dissipative or active platforms, manyoptions open up for control design. However, the integrationinto the human control apparatus is challenging.
Current exoprosthetic controllers exhibit a high degree ofintelligence: They work with sophisticated rules [24], gait-phase dependent damping like the C-Leg (Otto Bock) or
c©2011 by Walter de Gruyter, Berlin, New York

2
the Rheo Knee (Ossur), with variable stiffness [26], or withartificial reflexes [6]. What is problematic in these intelligentdevices is the accompanying autonomy: The user does nothave direct control over the leg. Clinical studies show thatpatients can feel forced to adapt to the system [28].
There have been attempts to integrate prosthesis controlmore tightly with human sensorimotor control. One applicablestrategy could be the use of electromyography (EMG), whichmeasures motor commands sent to the muscles. This methodhas been applied to hand prostheses [4] and exoskeletons [7],[19], and it has been attempted also for knee prostheses [5].For the upper extremities, the surgical procedure of TargetedMuscle Reinnervation already allows dexterous control ofmultiple degrees of freedom [22]. However, a disadvantageof EMG is its high sensitivity to noise, especially when non-invasive methods are used. For a leg prosthesis, robustnessiscrucial. Furthermore, EMG cannot be used for all patients.
A key to estimating user intention may be to observeresidual body motion. An early approach was made by simply“echoing” the motion of the residual leg to the other side [12].However, a major disadvantage is the time delay of one stepthat is introduced between human and prosthetic actions. Asimilar approach is taken by the control of the the Power Knee:Its “Sound-Side Sensory Control” allows various movementprimitives, with their number and type limited by an explicitstate machine [2]. The prosthetic leg is synchronized withmotion of the contralateral sound leg, which is possible dueto sensors in a shoe insole. However, such an approach limitsthe use to cyclic, symmetric patterns, and it requires initiatingnew motions with the sound side. Furthermore, it cannot beused for bilateral amputees.
Recently, we suggested an instantaneous, delay-free ap-proach to motion intention estimation of missing or paralyzedlimbs [13], [16]. This approach, Complementary Limb Mo-tion Estimation (CLME), observes residual body motion, andit continuously complements this motion for missing limbsby simple regression. This is possible because physiologicalhuman motion exhibits strong interjoint cooordination [25],enabling statistical estimation of missing movements. CLMEshould not be confounded with the above mentioned echo-control approaches, which replay the recorded motion of oneleg with a time shift on the other side. In contrast, CLMEoffers a continuous and instantaneous complementation ofmotion. Initially developed for robot-aided gait rehabilitationof hemiparetic patients, CLME has been successfully testedon a rehabilitation robot [15], [16].
In this paper, we show how CLME can be transferred toactive prostheses. To allow a first practical evaluation, a simpleactuated prosthesis has been realized. The device is used incombination with sensors to measure angles and velocities ofthe user’s residual body motion. We show data of an amputeesubject walking on a treadmill, as well as ascending anddescending stairs.
II. M ATERIALS AND METHODS
A. Complementary Limb Motion Estimation(CLME)The goal of Complementary Limb Motion Estimation is to finda mapping function that outputs the states of missing limbs(angles and velocities) in dependence of the states of residualhuman limbs. To obtain this function, interjoint coordinationpatterns are extracted from recorded physiological movementtrajectories. Then, a reference motion is generated on-line forexoprosthetic joints, using the current motion of the residuallimbs.
To find a static mapping that gives prosthetic joint motion asa function of residual human joint motion, there are numerousapproaches in statistical regression. A simple linear mappinghas shown acceptable results in past experiments in robot-aided gait rehabilitation [16], so a function of the type
(
ϕp
ϕp
)
= K
(
ϕh
ϕh
)
+ k (1)
is used, with mapping matrixK and offset vectork. Here,the motion of the considered human body joints is describedby the angle vectorϕh and the vector of angular velocitiesϕh, and the motion of the prosthetic joints is described by thevectorsϕp and ϕp for angles and velocities, respectively.
To obtain K and k, conventional Best Linear UnbiasedEstimation (BLUE) is used here as the baseline approach toregression [1]. First, a given movement pattern (e.g. levelgait)is recorded from a non-impaired subject, and mean values (ϕ
and ¯ϕ) and standard deviations (subsumed in the diagonalmatrix S) are extracted for all joints. Using this information,the normalized state vectorxh is defined, containing only thedata of human joints that will also be available in the amputeesubject:
xh := S−1
h
[(
ϕh
ϕh
)
−
(
ϕh¯ϕh
)]
. (2)
The same is done for the states of the prosthetic joint(s):
xp := S−1
p
[(
ϕp
ϕp
)
−
(
ϕp¯ϕp
)]
. (3)
The estimate ofxp as a function ofxh is then found byminimizing the expected error
E(||xp −Cxh||2) → min (4)
in terms of the constant matrixC. Using the covariancematricesMhh and Mhp of the respective data vectors inrecorded physiological motion, the solution is given by:
C = (M−1
hhMhp)T , xp = Cxh. (5)
The outputs are augmented with mean and standard deviationof the physiological motion, which gives reference angle andvelocity for the prosthetic joint(s). In summary, the coefficientsin K andk in (1) are obtained by:
K = SpCS−1
h , k = −K
(
ϕh¯ϕh
)
+
(
ϕp¯ϕp
)
(6)

3
The estimates are subject to uncertainty, and there could bea discrepancy between estimated velocity and the derivative ofthe estimated angle. To merge the two pieces of informationfor each joint, a Kalman filter is used. This filter is designedbased on the model of a double integrator, and noise covari-ance matrices are obtained from the regression error of angleand angular velocity [13], [14].
In this application of an actuated knee prosthesis for theright knee, the observed human joints are chosen as left hipangle ϕhip,l and left knee angleϕkn,l. They are used toestimate knee angleϕkn,r for the prosthesis on the right:
ϕh :=(
ϕhip,l ϕkn,l
)T, ϕp :=
(
ϕkn,r
)T, (7)
with corresponding joint angular velocities. The Kalman filteroutput provides the reference for a position controller forthejoint.
This application shows that the state vectors of observedand prosthetic limbs do not have to be of equal size. Therecould be other limbs involved as part ofxh. This wouldrequire different or additional sensors, for example to measuretrunk inclination. The ipsilateral hip had been included asanadditional predictor in preliminary experiments, but thisledto unstable oscillating behavior during stance. This effect maybe due to the mechanical coupling between hip and knee.
It is possible to include not only the states, i.e. angles andvelocities, but also accelerations of residual human joints asinputs to the regression. Regardless of the input, it is alsopossible to estimate accelerations for the prosthetic joints, toobtain an additional piece of information for the Kalman Filter.Simulations indicated that if angles and velocities are avail-able, additional measurement of accelerations hardly improvesestimation performance [14].
In summary, a recorded reference motion is reduced tothe coefficients inK and k and the Kalman gains. Basedon these parameters and driven by sound limb motion, on-line estimation provides a position reference for the prostheticjoint(s). Thus, CLME automatically exploits the observedkinematic correlations between joints, no explicit knowledgeof the motion (e.g. the gait phase) is needed.
B. Experimental Setup and Data Acquisition
The experimental setup consists of an actuated knee joint, aswell as angle and angular velocity sensors attached to thecontralateral hip and knee (Fig. 1).
The knee joint is actuated by a Maxon RE 40 DC motorwith a planetary gear with transmission ratioi = 91. Tomeasure knee angle, the motor is equipped with an opticalquadrature encoder. The knee joint can be attached easily tothe patient’s individual prosthetic shaft and foot using standardpyramid adapters. Flexion/extension angles and velocities ofhip and knee joint are measured using goniometer-gyroscopeunits, as described in [9], [10]. Their redundant design withtwo potentiometers per unit, connected by a telescopic shaft,allows to measure angles without requiring any joint align-ment. They are attached to the body using velcro straps.
As the focus of this project is not on hardware development,but on control, the device is tethered and depends on an exter-nal power supply. Control and data acquisition is realized viaMATLAB/Simulink and RTAI Linux running on a desktop PCat a rate of 1 kHz. This PC, electronics, and the power supplyare mounted on a cart that can be moved with the humansubject. Safety mechanisms include mechanical and softwareend stops, as well as manual emergency stop switches.
To obtain the mapping matrices for the CLME controller, anon-impaired 23-year-old female subject walked on a treadmillat a speed of 3 km/h, as well as up and down stairs, equippedwith the goniometer-gyroscope units to measure knee andhip flexion angles and velocities on both legs. Then, theinterjoint coupling matrixC, as well as statistical informationfor normalization were extracted from the recorded data, asdescribed above. The mapping coefficients are given in theappendix.
A 42-year old female subject with transfemoral amputationtook part in this case study and walked on a treadmill, as wellas up and down stairs with the previously extracted couplingsof the non-impaired subject. The subject was allowed to holdon to the bars during treadmill walking and to the handrailof the stairs, respectively. Furthermore, an assisting personsecured her on the stairs.
Reflective markers were attached to the hip, knee, heel,forefoot, and ankle, in order to allow later motion analysis((Fig. 1). One camera was used to subsequently record themarker positions of left and right side during treadmill walk-ing. To compensate for changes in perspective in these two-dimensional recordings (e.g. due to not perfectly symmetriccamera positions on left and right side), a linear transformationof the recorded data points was performed, using knownside-symmetric landmarks on the treadmill and Least-Squaresoptimization. Stair trials were also captured, but only forvideodocumentation, as markers were not visible.
Treadmill walking was compared between CLME-controlled walking and gait with the C-Leg, especially con-cerning the level of symmetry and the presence of com-pensatory motion. Symmetry was assessed by comparing thestance-to-swing ratio between legs, which denotes the timeratio spent for each leg with and without ground contact. “Toe
DC motor
with encoder
connection to
external controller
and power supply
goniometer
-gyroscopes
conventional
passive foot
Fig. 1. Experimental Setup (left) and marker placement for gaitanalysis (right).
4
off” and “Heel Strike” events were detected by off-line anal-ysis of the kinematic data. Stair descent was compared onlyqualitatively to the same motion with the C-Leg; alternatingstair ascent is not possible with the C-Leg.
III. R ESULTS
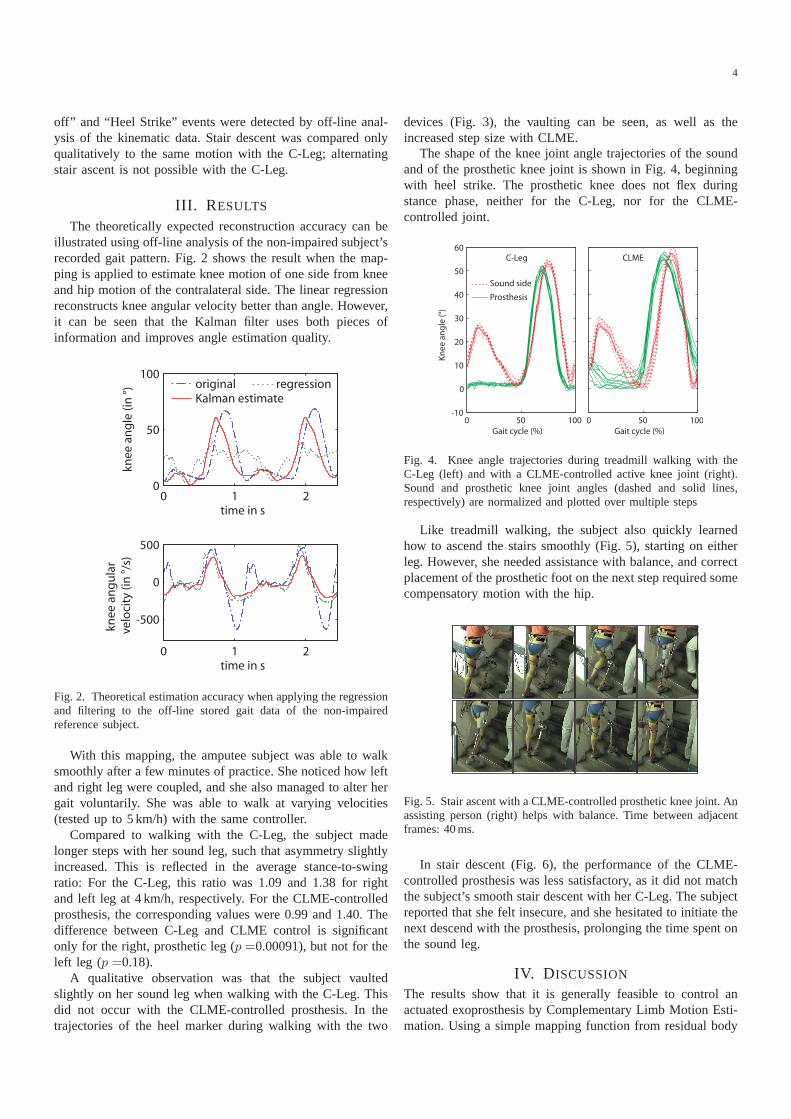
The theoretically expected reconstruction accuracy can beillustrated using off-line analysis of the non-impaired subject’srecorded gait pattern. Fig. 2 shows the result when the map-ping is applied to estimate knee motion of one side from kneeand hip motion of the contralateral side. The linear regressionreconstructs knee angular velocity better than angle. However,it can be seen that the Kalman filter uses both pieces ofinformation and improves angle estimation quality.
0 1 20
50
100
kn
ee
an
gle
(in
°)
time in s
0 1 2
-500
0
500
time in s
original regression Kalman estimate
kn
ee
an
gu
lar
ve
loci
ty (
in °
/s)
Fig. 2. Theoretical estimation accuracy when applying the regressionand filtering to the off-line stored gait data of the non-impairedreference subject.
With this mapping, the amputee subject was able to walksmoothly after a few minutes of practice. She noticed how leftand right leg were coupled, and she also managed to alter hergait voluntarily. She was able to walk at varying velocities(tested up to 5 km/h) with the same controller.
Compared to walking with the C-Leg, the subject madelonger steps with her sound leg, such that asymmetry slightlyincreased. This is reflected in the average stance-to-swingratio: For the C-Leg, this ratio was 1.09 and 1.38 for rightand left leg at 4 km/h, respectively. For the CLME-controlledprosthesis, the corresponding values were 0.99 and 1.40. Thedifference between C-Leg and CLME control is significantonly for the right, prosthetic leg (p =0.00091), but not for theleft leg (p =0.18).
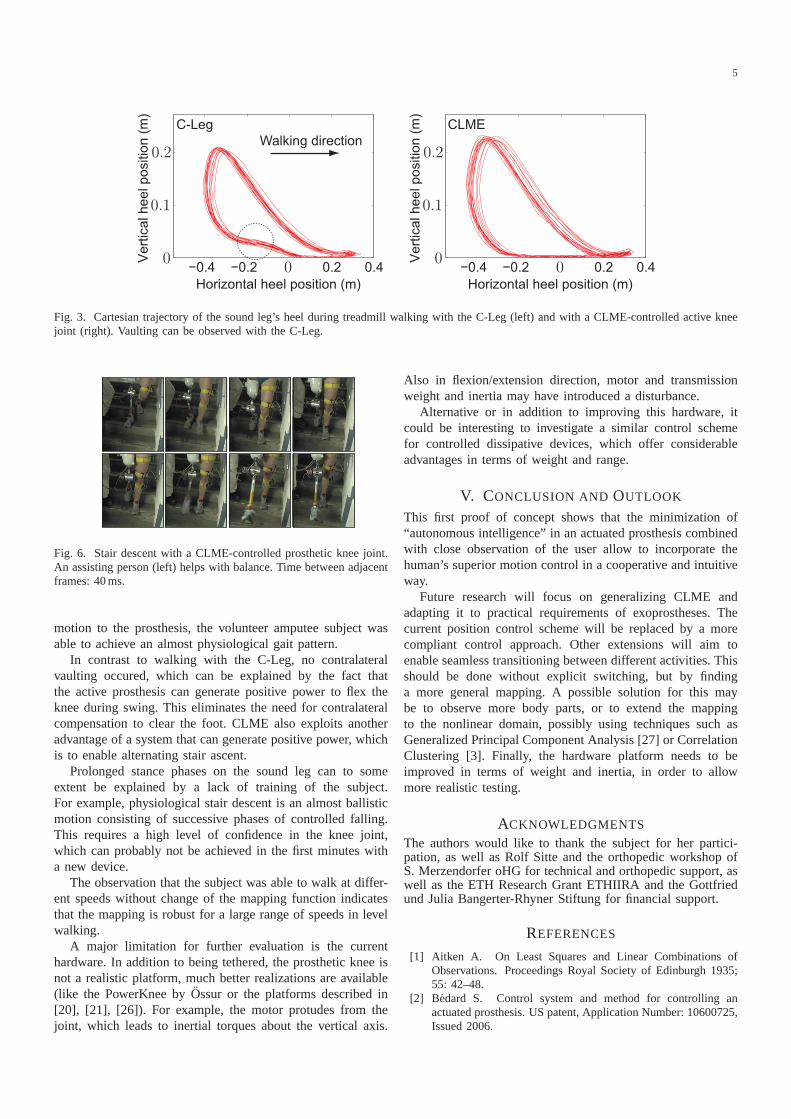
A qualitative observation was that the subject vaultedslightly on her sound leg when walking with the C-Leg. Thisdid not occur with the CLME-controlled prosthesis. In thetrajectories of the heel marker during walking with the two
devices (Fig. 3), the vaulting can be seen, as well as theincreased step size with CLME.
The shape of the knee joint angle trajectories of the soundand of the prosthetic knee joint is shown in Fig. 4, beginningwith heel strike. The prosthetic knee does not flex duringstance phase, neither for the C-Leg, nor for the CLME-controlled joint.
0 50 100-10
0
10
20
30
40
50
60
Gait cycle (%)
0 50 100
Gait cycle (%)K
ne
e a
ng
le (
°)
CLMEC-Leg
Sound side
Prosthesis
Fig. 4. Knee angle trajectories during treadmill walking with theC-Leg (left) and with a CLME-controlled active knee joint (right).Sound and prosthetic knee joint angles (dashed and solid lines,respectively) are normalized and plotted over multiple steps
Like treadmill walking, the subject also quickly learnedhow to ascend the stairs smoothly (Fig. 5), starting on eitherleg. However, she needed assistance with balance, and correctplacement of the prosthetic foot on the next step required somecompensatory motion with the hip.
Fig. 5. Stair ascent with a CLME-controlled prosthetic knee joint. Anassisting person (right) helps with balance. Time between adjacentframes: 40 ms.
In stair descent (Fig. 6), the performance of the CLME-controlled prosthesis was less satisfactory, as it did not matchthe subject’s smooth stair descent with her C-Leg. The subjectreported that she felt insecure, and she hesitated to initiate thenext descend with the prosthesis, prolonging the time spentonthe sound leg.
IV. D ISCUSSION
The results show that it is generally feasible to control anactuated exoprosthesis by Complementary Limb Motion Esti-mation. Using a simple mapping function from residual body
5
−0.4 −0.2 0.2 0.4
Horizontal heel position (m)
Ve
rtic
al h
ee
l p
ositio
n (
m)
Walking direction
−0.4 −0.2 0.2 0.4
Horizontal heel position (m)
Ve
rtic
al h
ee
l p
ositio
n (
m)
C-Leg CLME
replacements
00
00
0.20.2
0.10.1
Fig. 3. Cartesian trajectory of the sound leg’s heel during treadmill walking with the C-Leg (left) and with a CLME-controlled active kneejoint (right). Vaulting can be observed with the C-Leg.
Fig. 6. Stair descent with a CLME-controlled prosthetic knee joint.An assisting person (left) helps with balance. Time between adjacentframes: 40 ms.
motion to the prosthesis, the volunteer amputee subject wasable to achieve an almost physiological gait pattern.
In contrast to walking with the C-Leg, no contralateralvaulting occured, which can be explained by the fact thatthe active prosthesis can generate positive power to flex theknee during swing. This eliminates the need for contralateralcompensation to clear the foot. CLME also exploits anotheradvantage of a system that can generate positive power, whichis to enable alternating stair ascent.
Prolonged stance phases on the sound leg can to someextent be explained by a lack of training of the subject.For example, physiological stair descent is an almost ballisticmotion consisting of successive phases of controlled falling.This requires a high level of confidence in the knee joint,which can probably not be achieved in the first minutes witha new device.
The observation that the subject was able to walk at differ-ent speeds without change of the mapping function indicatesthat the mapping is robust for a large range of speeds in levelwalking.
A major limitation for further evaluation is the currenthardware. In addition to being tethered, the prosthetic knee isnot a realistic platform, much better realizations are available(like the PowerKnee byOssur or the platforms described in[20], [21], [26]). For example, the motor protudes from thejoint, which leads to inertial torques about the vertical axis.
Also in flexion/extension direction, motor and transmissionweight and inertia may have introduced a disturbance.
Alternative or in addition to improving this hardware, itcould be interesting to investigate a similar control schemefor controlled dissipative devices, which offer considerableadvantages in terms of weight and range.
V. CONCLUSION AND OUTLOOK
This first proof of concept shows that the minimization of“autonomous intelligence” in an actuated prosthesis combinedwith close observation of the user allow to incorporate thehuman’s superior motion control in a cooperative and intuitiveway.
Future research will focus on generalizing CLME andadapting it to practical requirements of exoprostheses. Thecurrent position control scheme will be replaced by a morecompliant control approach. Other extensions will aim toenable seamless transitioning between different activities. Thisshould be done without explicit switching, but by findinga more general mapping. A possible solution for this maybe to observe more body parts, or to extend the mappingto the nonlinear domain, possibly using techniques such asGeneralized Principal Component Analysis [27] or CorrelationClustering [3]. Finally, the hardware platform needs to beimproved in terms of weight and inertia, in order to allowmore realistic testing.
ACKNOWLEDGMENTS
The authors would like to thank the subject for her partici-pation, as well as Rolf Sitte and the orthopedic workshop ofS. Merzendorfer oHG for technical and orthopedic support, aswell as the ETH Research Grant ETHIIRA and the Gottfriedund Julia Bangerter-Rhyner Stiftung for financial support.
REFERENCES
[1] Aitken A. On Least Squares and Linear Combinations ofObservations. Proceedings Royal Society of Edinburgh 1935;55: 42–48.
[2] Bedard S. Control system and method for controlling anactuated prosthesis. US patent, Application Number: 10600725,Issued 2006.

6
[3] Bohm C, Kailing K, Kroger P, Zimek A. Computing Clustersof Correlation Connected Objects. In: Proceedings of the ACMSIGMOD International Conference on Management of Data(COMAD). 2004; 1–12.
[4] Castellini C, van der Smagt P. Surface EMG in advanced handprosthetics. Biological Cybernetics published online November2008; 1–13.
[5] Donath M. Proportional EMG control for above-knee prosthe-sis. Master’s thesis, MIT, Department of Mechanical Engineer-ing, Cambridge, MA, 1974.
[6] Eilenberg M F, Geyer H, Herr H. Control of a PoweredAnkle-Foot Prosthesis Based on a Neuromuscular Model. IEEETransactions on Neural Systems and Rehabilitation Engineering2010; 18: 164–73.
[7] Fleischer C. Controlling Exoskeletons with EMG signalsand a Biomechanical Body Model. Ph.D. thesis, TechnischeUniversitat Berlin, 2007.
[8] Flowers W C. A man-interactive simulator system for above-knee prosthetics studies. Ph.D. thesis, Cambridge, MA, MIT,Department of Mechanical Engineering., 1973.
[9] Fuhr T. Ein kooperatives, patientengefuhrtes Regelungssystemzur Bewegungsrestitution mit einer Neuroprothese. Ph.D. thesis,Lehrstuhl fur Steuerungs- und Regelungstechnik, TechnischeUniversitat Munchen, 2004.
[10] Fuhr T, Schmidt G. Design of a patient-mounted multi-sensorsystem for lower extremity neuroprostheses. In: Proceedingsof The First Joint BME/EMBS Conference. Atlanta, GA, USA,1999; 662.
[11] Goldfarb M, Barth E, Gogola M, Wehrmeyer J. Designand Energetic Characterization of a Liquid-Propellant-PoweredActuator for Self-Powered Robots. IEEE/ASME Transactionson Mechatronics 2003; 8: 254–262.
[12] Grimes D, Flowers W C, Donath M. Feasibility of an activecontrol scheme for A/K prostheses. Journal of BiomedicalEngineering 1977; 99: 215–221.
[13] H Vallery. Stable and User-Controlled Assistance of HumanMotor Function. Ph.D. thesis, Institute of Automatic ControlEngineering, Technische Universitat Munchen, 2009.
[14] H Vallery, Buss M. Bewegungsintentionsschatzung auf Basisvon Gelenkkoordination. at-Automatisierungstechnik 2007; 55:503–510.
[15] H Vallery, Ekkelenkamp R, van der Kooij H, Buss M. Comple-mentary Limb Motion Estimation based on Interjoint Coordi-nation: Experimental Evaluation. In: Proceedings of the IEEEInternational Conference on Rehabilitation Robotics (ICORR).Noordwijk, The Netherlands, 2007; 798–803.
[16] H Vallery, van Asseldonk E, Buss M, van der Kooij H.Reference Trajectory Generation for Rehabilitation Robots:Complementary Limb Motion Estimation. IEEE Transactionson Neural Systems and Rehabilitation Engineering 2009; 17:23–30.
[17] Hafner B J, Willingham L L, Buell N C, Allyn K J, Smith D G.Evaluation of function, performance, and preference as trans-femoral amputees transition from mechanical to microprocessorcontrol of the prosthetic knee. Archives of Physical Medicineand Rehabilitation 2007; 88: 207–217.
[18] Johansson J L, Sherrill D M, Riley P O, Bonato P, Herr H.A clinical comparison of variable-damping and mechanicallypassive prosthetic knee devices. American Journal of PhysicalMedicine & Rehabilitation 2005; 84: 563–575.
[19] Kawamoto H, Kanbe S. Power Assist Method for HAL3,Estimating Operator Intention Based on Motion Information.In: Proceedings of the IEEE International Workshop on Robotand Human Interactive Communication. 2003; 67–72.
[20] Lambrecht B, Kazerooni H. Design of a semi-active knee pros-
thesis. In: Proceedings of the IEEE International Conferenceon Robotics and Automation (ICRA). 2009; 639 –645.
[21] Martinez-Villalpando E, Weber J, Elliott G, Herr H. Design ofan agonist-antagonist active knee prosthesis. In: Proceedings ofthe IEEE RAS EMBS International Conference on BiomedicalRobotics and Biomechatronics (BioRob). 2008; 529 –534.
[22] Miller L A, Lipschutz R D, Stubblefield K A, et al.. Controlof a Six Degree of Freedom Prosthetic Arm After TargetedMuscle Reinnervation Surgery. Archives of Physical Medicineand Rehabilitation 2008; 89: 2057 – 2065.
[23] Popovic D, Schwirtlich L. Belgrade active A/K prosthesis.Electrophysiological Kinesiology (International Congress Se-ries), Amsterdam, Excerpta Medica 1988; 804: 337–343.
[24] Popovic D, Tomovic R, Tepavac D. Control aspects of activeabove-knee prosthesis. International Journal of Man-MachineStudies 1991; 35: 751–767.
[25] St-Onge N, Feldman A G. Interjoint coordination in lowerlimbs during different movements in humans. ExperimentalBrain Research 2003; 148: 139–49.
[26] Sup F, Bohara A, Goldfarb M. Design and Control of a PoweredTransfemoral Prosthesis. International Journal of RoboticsResearch 2008; 27: 263–273.
[27] Vidal R, Ma Y, Sastry S. Generalized Principal ComponentAnalysis (GPCA). IEEE Transactions on Pattern Analysis andMachine Intelligence 2005; 27: 1945–1959.
[28] Wetz H H, Hafkemeyer U, Drerup B. Einfluss des C-Leg-Kniegelenk-Passteiles der Fa. Otto Bock auf die Ver-sorgungsqualitat Oberschenkelamputierter. Orthopade 2005; 34:298, 300–314, 316–9.
APPENDIXThe mapping matrixK and offset vectork in (1) for level gait
are:
K =
(
−0.050 0.105 −0.125 s 0.012 s18.481/s 7.911/s −1.78 0.67
)
,
k =
(
21.73 ◦
−573.82 ◦/s
)
.
The values for stair ascent are:
K =
(
−1.242 −0.189 −0.048 s −0.046 s−1.05/s 0.79/s −0.73 −0.25
)
,
k =
(
93.10 ◦
17.08 ◦/s
)
,
and for stair descent:
K =
(
−1.372 −0.024 −0.147 s −0.022 s29.49/s −1.08/s −1.32 0.97
)
,
k =
(
72.82 ◦
−705.69 ◦/s
)
.