Compass Thesis 2010

of 102
-
Upload
cibisonnia -
Category
Documents
-
view
215 -
download
0
Transcript of Compass Thesis 2010
-
8/8/2019 Compass Thesis 2010
1/102
Development of an Electronic Compass
1
Development of an Electronic Compass
Presented by
Ting Song
A Thesis Submitted
In Total Fulfillment of the Requirements forThe Degree of
Master of Engineering in Electrical Engineering and
Information Technology
Department of Electrical Engineering and Information Technology,
Faculty of Electrical Engineering, Production Engineering and Information Technology
University of Applied Science Rosenheim
Rosenheim, February, 2006
-
8/8/2019 Compass Thesis 2010
2/102
Development of an Electronic Compass
2
TABLE OF CONTENTS
1 SYSTEM DESCRIPTION............................................................................................................................. 4
1.1 OVERVIEW OF THE SYSTEM ........................................................................................................................ 41.2 GENERAL INTRODUCTION ABOUT THE SIGNAL GENERATION ...................................................................... 61.3 SENSOR MODEL.......................................................................................................................................... 71.4 HOW TO OPERATE AND SWITCH SENSORS ................................................................................................... 81.5 LOW PASS FILTER AND GAIN ADJUSTMENT................................................................................................. 91.6 SYNCHRONOUS RECTIFIER......................................................................................................................... 91.7 INTEGRAL CONTROLLER........................................................................................................................... 101.8 U/I CONVERTER....................................................................................................................................... 121.9 DC ZERO_BIAS GENERATION ................................................................................................................... 131.10 DC-DC CONVERTER AND INVERTER...................................................................................................... 14
2. MATHEMATICS PART........................................................................................................................... 15
2.1 TASK OF THE MATHEMATICS PART ........................................................................................................... 152.2 GENERAL INTRODUCTION ABOUT EARTH MAGNETIC FIELD...................................................................... 172.3 COORDINATE TRANSFORMATION ............................................................................................................. 17
2.3.1 Changing the heading angle ........................................................................................................ 182.3.2 Changing the pitch angle ............................................................................................................... 192.3.3 Changing the roll angle.................................................................................................................. 20
2.4 CALCULATE Z COMPONENT WITH MAGNITUDE........................................................................................ 21
2.5 CALCULATE PITCH ANGLE AND ROLL ANGLE USING AN ACCELEROMETER......................................... 222.6 CALCULATE HEADING ANGLE .................................................................................................................. 232.7 PROBLEM: THE SIGN OF THE HZ3 .............................................................................................................. 24
3 HARDWARE DESCRIPTION .................................................................................................................. 27
3.1 DC-DC CONVERTER................................................................................................................................ 27
3.2 DC-DC INVERTER.................................................................................................................................... 283.3 TILT MEASUREMENT (ACCELEROMETER PART)........................................................................................ 29
3.3.1 Introduction of the tilt sensor ......................................................................................................... 293.3.2 Circuit description.......................................................................................................................... 29
3.4 SIGNAL GENERATION ............................................................................................................................... 303.4.1 Clock signal generation.................................................................................................................. 303.4.2 Switch signal generation ................................................................................................................ 313.4.3 Sinusoidal signal generation .......................................................................................................... 333.4.3.1 The Fourier Transform of the 50% duty cycle signal.................................................................. 333.4.3.2 Design the low pass filter .......................................................................................................... 333.4.3.3 Design the voltage divider. ........................................................................................................ 363.4.3.4 All pass filter network and amplification for the sinusoidal signal ........................................... 37
3.5 SENSOR MODEL........................................................................................................................................ 393.5.1 The material and the structure of sensors ...................................................................................... 393.5.2 Sensor output signal ....................................................................................................................... 39
3.6 SENSOR ACTIVATION ............................................................................................................................... 403.6.1 Switch signal to active one sensor at a time................................................................................... 403.6.2 Switch the sensor output signal ...................................................................................................... 42
3.7 LOW PASS FILTER AND NON-INVERTING AMPLIFIER FOR THE SENSOR OUTPUT SIGNAL............................. 423.8 SYNCHRONOUS RECTIFIER....................................................................................................................... 43
3.8.1 The function of synchronous rectifier............................................................................................. 433.8.2 Mathematical description of the synchronous rectifier .................................................................. 443.8.3 How to realize the function by hardware? ..................................................................................... 46
3.9 INTEGRAL CONTROLLER........................................................................................................................... 473.9.1 Controller activation signal switch ................................................................................................ 473.9.2 Design the integral controller ........................................................................................................ 48
3.10 U/I CONVERTER..................................................................................................................................... 483.11 DC ZERO_BIAS GENERATION ................................................................................................................. 503.12 MICROCONTROLLER PART ..................................................................................................................... 51
-
8/8/2019 Compass Thesis 2010
3/102
Development of an Electronic Compass
3
3.13 LAYOUT DESCRIPTION............................................................................................................................ 533.14 CONNECTOR PIN DESCRIPTION ............................................................................................................... 56
3.14.1 Connector between the microcontroller board and Sensor board ............................................... 563.14.2 Connector between Sensor board and Oscillation board............................................................. 56
4 SOFTWARE PART..................................................................................................................................... 59
4.1 THE MAIN PROGRAM ................................................................................................................................ 594.2 MICROCONTROLLERINITIATION .............................................................................................................. 614.3 DISPLAY INITIATION ................................................................................................................................ 634.4 FUNCTION: ACCELEROMETER_CALIBRATION ........................................................................................... 654.5 FUNCTION: START_CONDITION ................................................................................................................ 674.6 FUNCTION: VERTICAL_CHECK.................................................................................................................. 684.7 FUNCTION: A_CALCULATION ................................................................................................................... 694.8 FUNCTION: WAIT...................................................................................................................................... 704.9 FUNCTION: MAGNITUDE_MEASUREMENT ................................................................................................. 714.10 FUNCTION: HEADING_CALCULATION..................................................................................................... 754.11 FUNCTION:ADC_READING ................................................................................................................... 784.12 FUNCTION: CONVERT ............................................................................................................................. 794.13 FUNCTION:WRITE_STRING.................................................................................................................. 80
5. TEST DOCUMENTATION...................................................................................................................... 82
5.1 TESTING FOR THE DC-DC CONVERTER AND INVERTER............................................................................ 825.2 TESTING FOR THE DC-DC CONVERTER AND INVERTER ON THE FINAL PCB............................................. 835.3 TESTING FOR THE TILT MEASUREMENT CIRCUIT....................................................................................... 845.4 TESTING THE OSCILLATOR PART .............................................................................................................. 845.5 CALIBRATION FOR THE ACCELEROMETER................................................................................................ 855.6 CALIBRATION FOR THE MAGNETIC FIELD DETECTOR CIRCUIT OUTPUTS ................................................... 865.7 TESTING THE HORIZONTAL DEVIATION WITH ACCELEROMETER SUPPLY VOLTAGE CORRECTION AFTEREVERY 10 TIMES OF THE HEADING CALCULATION.............................................................................................. 86
5.8 TESTING THE DEVIATION WITH 40,30,20,10 PITCH ....................................................................... 88
APPENDIX SOURCE CODE ..................................................................................................................... 89
-
8/8/2019 Compass Thesis 2010
4/102
Development of an Electronic Compass
4
1 System description
1.1 Overview of the system
This new electronic compass is based on the old one made in Operational Amplifier lab course
2004 in University of Applied Sciences in Rosenheim. The improvements are included:
A new software programming A new layout design A new design for +5V and 5V power supply A new housing
The target of the thesis is to make electronic compass that can display the heading angle with
respect to geographic north when its pitch range is 45,roll range is 15. The oldelectronic compass only can be used in the horizontal position. This new function is mainly
realized by software. The layout is another part of work in order to minimize the size. One of
the disadvantages of the old electronic compass is the power supply. The +5V and 5V that are
generated by a DC-DC converter and inverter is too noisy. In the software, we have to calculate
the average over 128 samples. It needs much time. To redesign the DC-DC converter and
inverter is also the task of this thesis.
The function of the electronic system is to display the direction of the electronic compass with
respect to geographic north.The angle between the magnetic and geographical meridians is
expressed as the magnetic declination. It is about 1.8 degree in Rosenheim. So if we get thedirection of the magnetic north, the geographic north can be easily calculated.
In order to calculate the direction of the electronic compass with respect to magnetic north, we
need the value of the components of the earth's magnetic field in two perpendicular directions,
i.e. we need two sensors. However, the sensors are not closed magnetic loops without leakage
flux. If they are mounted not to far apart (the electronic compass shall be small in order to use
it) one sensor will influence the other, if both are operated simultaneously and at the same
frequency. Experience shows, that the deviations arising from the mutual influence of one
sensor on the other lead to non-tolerable errors. /Mayr 2003/ So there are two possibilities:
both sensors are operated at different frequencies or only one sensor is operated at a time
The latter method has the additional advantage, that the operating current is lower. However,
operating only one sensor at one time will make the entire system more complicated. Digital
control signals have to be generated in order to switch from one sensor to the other.
If one uses a relaxation oscillator (with the LMC 555 CMOS universal timer), it can be used to
generate the control signals as well as two other signals
the sinusoidal signal with frequency0
f by the use of a low pass filter and
the digital signal with frequency 02f with exactly 50% duty cycle for the synchronousrectifier ( mixer) /Mayr 2003/
http://geotools.haifa.ac.il/index.php?fflag=SHOW_TERM&lang=eng&id=136http://geotools.haifa.ac.il/index.php?fflag=SHOW_TERM&lang=eng&id=136 -
8/8/2019 Compass Thesis 2010
5/102
Development of an Electronic Compass
5
Two magnetic field controllers exist in the magnetic detector circuit. The controller generates
an zero_bias current, so that the static magnetic field component of the earths magnetic field is
exactly compensated. So the output of the controller can be used to measure the magnetic earth
field along the sensor axis.
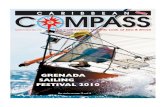
The system block diagram is shown in figure 1.
Figure 1: System block diagram of electronic electronic compass /Mayr 2003/
-
8/8/2019 Compass Thesis 2010
6/102
Development of an Electronic Compass
6
1.2 General introduction about the signal generation
This part is the general introduction about signal generation. In this system, we need to
generate the sensor switch signal, the synchronous rectifier switch signal, the integral
controller control signal and the sensor operation signal.
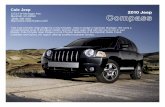
The block diagram of the signal generation is shown in Figure 2.
Figure 2: The block diagram of signal generation part
A signal with frequency 4f0 with 6364Hz is generated from LMC555 timer circuit. A trimm
resistor can adjust this frequency. In order to get an exact 50% duty cycle signal, the frequency
of the LMC555 output signal is first reduced by a counter (MM74HC393) by a factor of two to
get 02f . This signal is used to control the synchronous rectifier for the extraction of the
second harmonic. In order to operate the sensors, the frequency of this signal is reduced by
factor of two again to get 0f . By a 4th order low pass filter, a low THD sinusoidal signal is
generated for sensor excitation. The following all pass filter is used to adjust the phase of the
sensor excitation signal, so that it fits to the phase of the synchronous rectifier.
With the counter, the frequency is reduced to 4/0f . This signal is used to be the CLK of a D
flip flop. Then the frequency is reduced by a factor of 16 that is 64/0f by the 2nd 4 bit counter.
This signal from the counter with frequency 64/0f is the sensor switch signal. It controls,
that only one sensor active at a time. After a D flip flop, the input signal with frequency
64/0f is delayed by a clock pulse. Then, the two signals with same frequency 64/0f are
used as inputs to a NOR and an AND gate in order to generate the controller activation signals.(The AND gate is realized by three NOR gates is our design, because they are already there in
the chip. See chapter 3.4.2 in detail)
-
8/8/2019 Compass Thesis 2010
7/102
Development of an Electronic Compass
7
1.3 Sensor model
Figure 3: The structure of the sensor
The structure of the sensor is shown in figure 3. There are two coils around the ceramic tube.
One is the excitation coil for sinusoidal current input. Another one is the signal coil to output
the signal.
The sensors are made by soft magnetic materials, which are very nonlinear. So, there is a non
linear dependence of the magnetic flux density B within the soft magnetic material and the
magnetic field H that is described in the famous hysteresis loop. Because of the hysteresis loop,the actual magnetic flux density does not only depend on the current magnetic field H, but also
on the entire history of H. For this feature, the magnetic field controller is used in the system.
This part will be introduced in 1.7 integral controller. /Mayr 2003/
Another of fact of nonlinearity is generating of harmonics. If a linear system is excited by a
purely sinusoidal signal, the output signal of this system will also be purely sinusoidal with the
frequency of the input signal. There will be no harmonics. But if the system is nonlinear,
harmonics will be generated. The output signal will contain additional frequency with 2f0, 3f0,
4f0.nf0, n=2,3,. /Mayr 2003/
The sensor is excited by sinusoidal current signal with frequency 0f . With the theory above,
the output voltage signal contains the base sinusoidal voltage signal with frequency 0f and its
harmonics.
For the pure sinusoidal magnetic field, the hysteresis loop will run through symmetrically and
B(t+T/2)=-B(t). If the magnetic field H gets a DC component, i.e. the component of the earths
magnetic field in sensor direction, then B(t+T/2) -B(t). This means, that now there will be afrequency component with for example 2f0 in the output signal. Experiments show, that the
second harmonic (frequency 2f0) is the even harmonic with the highest level. So the amplitude
of the second harmonic (frequency 2f0) is the best suited for use as quantity to measure
magnetic field. /Mayr 2003/
-
8/8/2019 Compass Thesis 2010
8/102
Development of an Electronic Compass
8
1.4 How to operate and switch sensors
In order to avoid any influence between two sensors, only one sensor is operated at a time. We
use a multiplexer to realize this function.
The function diagram of sensor switching is shown in figure 4. The input of the switch is the
sinusoidal signal. The 50% duty cycle square signal with frequency 25Hz controls the switch.
The diagram of switching the sensors is shown in figure 5. When the switch control signal is
high, the sinusoidal signal is used as the input to the E/W sensor. The sensor E/W sensor is
active. However, when the switch control signal is low, the N/S sensor is active.
Figure 4: The function diagram of sensor switching
1591Hz_sine
Sensor switch sensor N/S active
control signal sensor E/W active
E/W sensor
switch control
signal
N/S sensorswitch control
signal
Figure 5: The diagram of switching sensor
The outputs from the sensors have to be combined to one signal since the following part of the
electronic circuit only exists once. In one period, the combined signal is the output from E/W
sensor in the half of the time. For another half of the time it is the output from N/S sensor. The
principle diagram of the sensor output signal switching is shown in figure 6. The signals from
two sensors are the inputs of the switch. In the time that sensor N/S is active and sensor switchcontrol signal is low, the output is the signal from sensor N/S. However, in the time that sensor
E/W is active and sensor control switch signal is high, outputs is the signal from sensor E/W.
-
8/8/2019 Compass Thesis 2010
9/102
Development of an Electronic Compass
9
Sensor switch control signal with frequency 25Hz
Output
Figure 6: The principle of sensor output signal switching
1.5 Low pass filter and gain adjustment
This part consists of a low pass filter and a gain adjustment for the sensor output signal. The
output of the sensors contains harmonics. We use the low pass filter to attenuate the harmonics
of the sensor output signal with frequencies higher than 02f because they would also
generate a DC-output at the synchronous rectifier.
We use an operational amplifier IC OPA4743 to realize the low pass filter. The following part
after the low pass filter is a gain adjustment, which is a non-inverting amplifier circuit. The
amplitude is amplified by a factor of 3.2. It is also realized by OPA4743.
1.6 Synchronous rectifier
In order to measure the amplitude of the 2nd harmonic, the signal output from the gain
adjustment is used as input to a synchronous rectifier. It extracts the second harmonic
(frequency 0f ) of the input signal.
The principle of this part is showed in figure 7. The synchronous rectifier consists of a voltage
inverter and a multiplexer. The inverter is realized by an operational amplifier. The U in is the
input for synchronous rectifier. It is a combined of the base signal with frequency 0f and itsharmonics. The switch control signal is U_2F. It is a square signal with frequency 02f . The
value of the output of this synchronous rectifier depends on the component of the magnetic
field in sensor direction. The switch function is realized by an analog multiplexer, 75HC4053.
Signal from
E/W sensor
Signal from
N/S sensor
Switch
Signal
U_2F
-
8/8/2019 Compass Thesis 2010
10/102
Development of an Electronic Compass
10
Figure 7: The principle of synchronous rectifier
1.7 Integral controller
The rectified signal is used for an integral controller to measure the magnetic field.
First, I want to introduce the generation of the switch signal to activate and deactivate the
integral controller. The switch signal that is used to control the switching from one sensor to
another is very slow. It is generated at the very end of the signal generation part. There is aproblem for the following integral controller. The transient behaviour of the low pass filter and
gain adjustment during the switching process will disturb the controller. In order to neglect this
switching transient behaviour, we have to generate two additional signals that activate the
controller a certain time after the switching over. This part is done in the end of the signal
generating part. /Mary 2003/ The principle of generating the switch signal to control the
integral controller is shown figure 8.
With the two 4 bit counters, we get the square signal with frequency 64/0f that called signal
A. It is used as input to a D flip flop to get signal B. B has one clock time delay compared with
A. Then signals A and B are used as inputs to a AND gates to generate the controller signals,
UZ_E/W and UZ_N/S.
BASNUZ
BAWEUZ
/_
/_(from chapter 3.4.2)
UinInverter
amplifierUout
Synchronous
rectifier
-
8/8/2019 Compass Thesis 2010
11/102
Development of an Electronic Compass
11
Figure 8: The principle of generating switch signal to control the integral controller.
There are several reasons that we prefer an integral controller as the analogue controller. They
are expressed clearly in the lecture of Op Amp circuit design by Prof.Mayr.
The excitation frequency to excite the coil is about 1590 Hz that is f0 / 4. So the time, for which
a single controller is active (hereafter referred to as the active time in contrast to the inactive
time), is
msHzf
tactive 1.20256/6360
1
2
1
256/
1
2
1
0
.
If one would like to have longer active times, he would have to use an additional counter.
However, note that both sensors have to be operated in order to get the angle with respect to
magnetic north. The active time for a single sensor cant become too long, otherwise the time
for a reaction of the electronic compass display will become very long (i.e. seconds), which
will be very inconvenient.
The controller cannot be made very fast. The reason is the following. The input signal for the
controller is not a "DC voltage", i.e. a very slowly changing signal, but the switched output
signal of the sensor coil after notch filtering, amplification and phase shifting. The
synchronous rectifier acts like a mixer: the local oscillator frequency is 02 f , the input signal
from the sensor contains components with frequencies ...,8,4,2, 0000 ffff So the lowest
components in the output signal of the "mixer" will be a DC part (from the 02 f component)
and 0f (from the 0f component of the sensor signal mixed with the local oscillator
frequency 02 f ). Many higher frequency components will also be generated.
CLK
D input of Dflip flop
Output Q of
D flip flop
UZ_E/W
UZ_N/S
Controller E/W
active
Controller E/W
inactive
Controller N/S
inactive Controller N/Sactive
-
8/8/2019 Compass Thesis 2010
12/102
Development of an Electronic Compass
12
The output of the controller should be a very slowly changing signal, which is proportional to
the component of the earth's magnetic field in the direction of the sensor. In a fixed position,
the controller output signal would ideally be a pure DC voltage. However, the controller is a
linear system with a specific frequency response. So the non-DC frequency components have
to be attenuated by the controller to a sufficiently small level.
This means, that during one active time, the controller will not be able to settle to its final
value. It must remain in the state, which is reached at the end of the active time during its
inactive time and then begin again at the state, which has been reached at the end of the former
active time. The only controller with this behaviour is the integral controller: If the input
during the inactive time is identically zero (in our case zero input current!), the output will not
change. So an integral controller will be best suited for our purposes. Another advantage of the
integral controller is the fact, that there will not be any static control deviation. /Mayr 2003/
The principle of integral controller is shown in figure 9.
Figure 9: The principle of integral controller
The output voltage can be calculated as follows:
t
inout tVdttuRC
tV0
)0(')'(1
)(
)0( tV is the initial output voltageRC1 is the integral gain
1.8 U/I converter
This part is to convert the sum of the excitation voltage from sensors and the controller outputvoltage to a current. There are three voltage inputs of this converter. They are the sinusoid
sensor switch signal, the controller output voltage and the zero_bias compensation voltage.
The principle of U/I converter is shown in figure 10.
-
8/8/2019 Compass Thesis 2010
13/102
Development of an Electronic Compass
13
Figure 10: The principle of the U/I converter
If 11* RR , 22* RR , and 33* RR ,
then we can calculate the output current.
*** 3
3
2
2
1
1
R
U
R
U
R
UIout
1.9 DC zero_bias generation
In order to be used as input to the ADC of the microcontroller, the signal has to be between 0V
to the reference voltage of microcontroller, which is 2.5V. The controller output contains
positive and negative voltages. So the VREF from the microcontroller that about 2.5V is used to
generate the DC zero_bias voltage. The principle of DC zero_bias generation is shown in
figure 11.
Figure 11: The principle of DC zero_bias generation.
-
8/8/2019 Compass Thesis 2010
14/102
Development of an Electronic Compass
14
1.10 DC-DC converter and inverter
The DC-DC converter and inverter are not included in the system diagram. They generate the
+5V and 5V power supply for the whole system. We use the MAX1706 to be the DC-DC
converter. The noise of the +5V output is much lower than the old electronic compass. It has amaximum value of +3mV and minimum value of 3mV.
The DC-DC inverter is realized by MAX1853. It generates the negative output about 5V.
Literature
/Mayr 2003/ Mayr Wolfgang,Lecture in Operational Amplifier circuit design 2,
University of Applied Sciences Rosenheim
Winter 2003/04
-
8/8/2019 Compass Thesis 2010
15/102
Development of an Electronic Compass
15
2. Mathematics part
2.1 Task of the mathematics part
The aim of the mathematics part is to use the signals from the magnetic detector circuit and tilt
measurement circuit to calculate the heading angle with respect to magnetic north.
We use the definition of heading, pitch and roll for an airplane. Airplane convention defines
the attitude parameters in terms of three angles: heading , pitch and roll (see figure
12). These angles are referenced to the local horizontal plane. That is, the plane perpendicular
to the earths gravitational vector. Heading is defined as the angle in the local horizontal plane
measured clockwise from a true North (earth polar axis) direction. Pitch is defined as the
angle between the aircrafts longitudinal axis and the local horizontal plane (positive for nose
up). Roll is defined as the angle about the longitudinal axis between the local horizontal plane
and the actual flight orientation (positive for right wing down). /Michael/ For the electronic
compass, when looking at the display, it is like we watch the airplane from backward.
Figure 12: Coordinate direction (X,Y,Z) and attitude orientation (roll, pitch) on an airplane.
/Michael/
Figure13: The heading angle .
-
8/8/2019 Compass Thesis 2010
16/102
Development of an Electronic Compass
16
There are two perpendicular magnetic sensors fixed on the electronic compass. The directions
of the sensors are X1 and Y1. The magnetic components we get from the circuit are in the
sensor direction. The earth magnetic vector H
is in the plane XZ. Assume that the electronic
compass is horizontal, so the axes X, Y, X1 and Y1 are horizontal. There is a heading angle between the X axis and the sensor direction X1. This angle is what we want to know.
In the case that the electronic compass is horizontal like in figure 13. It is very easy to calculate
the heading angle .
sin
cos
1
1
HxH
HxH
Y
X(1)
(HX1 is the earth magnetic component in X1 direction and HY1 is the magnetic component in
Y1 direction. HX1 and HY1 can be measured by the sensors.)
But if the electronic compass is not horizontal, the calculation is much more complicated. Wemust first calculate the magnetic value in the horizontal plane. And then calculate the heading
angle with formula 5.
Figure 14: The electronic compass is no more horizontal. Axes X1 and Y1 are
perpendicular and in the horizontal plane. They have been the sensors directions before the
electronic compass was tilt. Z1 is vertical to ground. X3 and Y3 are the actual sensors
direction. Z3 is vertical to the X3Y3 plane.
In figure 14, the electronic compass is not horizontal anymore. It has a roll angleand pitchangle. The output magnetic value HX3 and HY3 are in the directions X3 and Y3. In order to
calculate the heading angle by formula 5, we need to transfer the HX3, HY3, HZ3 to thedirection X1, Y1 and Z1. So the main task of the mathematics part is to find this transformation
and how to get the values of the variables in the transformation.
X1
X3
Y1
Y3
Z1
Z3
-
8/8/2019 Compass Thesis 2010
17/102
Development of an Electronic Compass
17
2.2 General introduction about earth magnetic field.
Figure 15: Magnetic field in the earth /Honeywell 2003/
The earth magnetic vectors are shown in figure 15. The earth's magnetic field is about 0.6
gauss in an open-air environment, and has a direction from the magnetic south pole to the
magnetic north pole. This pointing to the north pole is the basis for magnetic electronic
compassing. At the equator, the magnetic field direction is entirely a horizontal vector, but as
the electronic compass is moved further into the northern or southern hemispheres, the
magnetic field will point partially downwards (northern hemisphere) or upwards (southern
hemisphere). This angle down or up at the earth's surface is called the inclination (dip) angle.
/Honeywell 2003/
city Berlin Dsseldorf Frankfurt Hamburg Mnchen
inclination 67.6 68.8 65.6 66.9 63.9
Table 1: The inclination of five city in Germany /Boll 1990/
2.3 Coordinate transformation
The sensors are fixed with respect to the electronic compass. So every time you move the
electronic compass, the magnetic values are in different directions. The values that are not in
horizontal plane are not suitable to be used directly to calculate the heading angle. It is
necessary to transfer them to the direction that is horizontal.
We assume that, the movement of the electronic compass is divided to three steps. The original
directions of two sensors are X and Y. First, turn left or right that the electronic compass has a
heading angle . The directions of sensors become X1 and Y1. The plane X1Y1 is horizontal.Second, move the electronic compass, so that has a pitch angle with respect to horizontal
plane. The directions of sensors become X2 and Y2. Third step, turn up or down so that the
-
8/8/2019 Compass Thesis 2010
18/102
Development of an Electronic Compass
18
electronic compass that has a roll angle . The directions of sensors become X3 and Y3.Finally, two magnetic components are in the directions X3 and Y3. So if we can transfer the
magnetic components to the directions X1 and Y1, the heading angle can be easilycalculated.
2.3.1 Changing the heading angle .
Figure 16: The axis changes if electronic compass has a heading angle with respect to
magnetic north. In the left diagram, the compass is seen from the back. In this case, 0 .The electronic compass is seen from top in the right diagram.
The transformation of the coordinates when the electronic compass has a heading angle withrespect to the earth magnetic vector H
is shown in figure 16. The directions of the sensors are
X1 and Y1.
In figure 16, the earth magnetic vector H is in the XZ plane, that we call it magnetic plane. The
axis Z is vertical to ground. Magnetic vector H
has its value HX, HY and HZ in XYZ
coordinates. We initially 0YH , so that the X-axis points exactly towards magnetic north.Now, we assume the electronic compass is horizontal, but has a heading angle with respect to
the magnetic north. The magnetic components Hx1 and Hy1 are in the directions X1 and Y1.
The Z direction doesnt change. The magnetic vector expressions in XY coordinate and X1Y1
coordinate are as follows:
V
H
Z
Y
X
H
H
H
H
H
H 0
(2)
-
8/8/2019 Compass Thesis 2010
19/102
Development of an Electronic Compass
19
V
H
H
Z
Y
X
H
H
H
H
H
H
H
sin
cos
1
1
1
1
(3)
2.3.2 Changing the pitch angle
Figure 17: In the left diagram, the compass is seen from the back. The X1Y1 plane is
horizontal. The sensors are in the directions X1 and Y1 before the movement. After the
movement, the sensors are in the directions X2 and Y2. The direction of the Y1 axis does notchange. The right diagram is seen from left.
The electronic compass is not horizontal anymore after adding a pitch angle. It turns around the
Y1 axis. The relation of the magnetic vectors value in two coordinates is shown below.
1
1
1
1
1
1
2
2
2
cos0sin
010
sin0cos
Z
Y
X
P
Z
Y
X
Z
Y
X
H
H
H
D
H
H
H
H
H
H
(4)
cos0sin
010
sin0cos1
PD (5)
Using1
PD instead
2
2
2
1
1
1
1
Z
Y
X
P
Z
Y
X
H
H
H
D
H
H
H
(6)
X1
Y1
Z2
X2
X1
X2
Z2
Z1
HZ1
HX1
Electronic
compass
-
8/8/2019 Compass Thesis 2010
20/102
Development of an Electronic Compass
20
2.3.3 Changing the roll angle
Figure 18: In the left diagram, the compass is seen from the back. The sensors are in the
directions X2 and Y2 when the roll 0 . After the movement, the directions of sensorschange to X3 and Y3. The direction of the X2 axis does not change in this case. The right
diagram is seen from the back.
The electronic compass is turned around the X2 axis and then the directions of sensors are Y3
and Z3. The X2 direction does not change. So there is a roll angle between the Y2 and Y3
axes. We can find out the relation of magnetic vectors value in two coordinates:
2
2
2
2
2
2
3
3
3
cossin0
sincos0
001
Z
Y
X
R
Z
Y
X
Z
Y
X
H
H
H
D
H
H
H
H
H
H
(7)
cossin0
sincos0
0011
RD (8)
Using1
RD instead
3
3
3
1
2
2
2
Z
Y
X
R
Z
Y
X
H
H
H
D
H
H
H
(9)
With the calculation above, we can easily get
1
1
1
3
3
3
Z
Y
X
RP
Z
Y
X
H
H
H
DD
H
H
H
(10)
Z3
Y3
Y2
Y2
Z3
Z2
X2Electroniccompass
Y3HZ2
HY2
-
8/8/2019 Compass Thesis 2010
21/102
Development of an Electronic Compass
21
3
3
3
11
1
1
1
Z
Y
X
RP
Z
Y
X
H
H
H
DD
H
H
H
(11)
With equation 9 and 12, the 11 RP DD can be calculated as follows:
coscossincossin
sincos0
cossinsinsincos
cossin0
sincos0
001
cos0sin
010
sin0cos11
RP DD (12)
3331
331
3331
coscossincossin
sincos
cossinsinsincos
ZYXZ
ZYY
ZYXX
HHHH
HHH
HHHH
(13)
In the above formula, there are five variables. They are , , Hx3, Hy3 and Hz3. The Hx3 andHy3 we get from the magnetic detector circuit. So the next step is to calculate the unknown
variables , and Hz3.
2.4 Calculate Z component with magnitude.
The magnitude is calculated with software. The electronic compass has two perpendicular
direction sensors. The magnitude of magnetic vector is sensitivityant in any position. i.e.2222
ZYX HHHH (14)
XH and YH are the sensor direction. ZH is in the direction vertical to the electronic
compass. So the ZH can now be calculated as:222
YXZ HHHH
In order to fix the sign, restrictions on the roll and pitch angle have to be made. (see chapter
2.7)
Figure 19: How to calculate the magnitude. The sensors are in the directions X and Y. Z
axis is vertical to XY plane.
-
8/8/2019 Compass Thesis 2010
22/102
Development of an Electronic Compass
22
In figure 19, when the electronic compass is horizontal, we can get the magnetic component in
X and Y directions. Because the magnetic vector is downwards, the z component is
sensitivityant and the x and y components are sinusoidal function in principle. If the electronic
compass is vertical, the sensor direction X becomes vertical and Y is still horizontal. The
magnetic value in X direction becomes sensitivityant and the components in the Y and Z
direction are a sinusoidal function. The software calculates the 22 YX HH when theelectronic compass is turning around 360 degree. There must have the maximum value that
equals to 2H , in which place the Z component is zero. In this case, the magnitude22
XY HHH . In this way, we can get the magnitude H. Even, if the compass is not
exactly turned down vertically during the rotation. There must be a position, where 0ZH ,because ZH is sometimes positive sometimes negative and continues. So it must go through
zero.
2.5 Calculate pitch angle and roll angle using anaccelerometer.
The pitch and roll value we get from accelerometer ADXL203. It can be used as 2-axis tilt
sensor with a roll axis and a pitch axis. The output signals AX and AY from the accelerometer
is converted to an acceleration that varies between 1g and +1g.
Figure 20: The gravity vector when the electronic compass has a pitch angle
The accelerometer can detect the gravity vector in two directions: the direction in electronic
compass plane and another direction vertical to the compass. These two directions are Hg
and g in the figure.
The gravity vector when the electronic compass only has a pitch angle is:
g gravity field
direction
gH
g
-
8/8/2019 Compass Thesis 2010
23/102
Development of an Electronic Compass
23
cos
sin
gg
ggH(15)
If turn the electronic compass has a roll angle , the Hg doesnt change and g is calculated
as follows: sincos gg /Analog 2004/
So, the output signals of the accelerometer are:
sincos_
sin_
gysensitivitbiaszeroAY
gysensitivitbiaszeroAX
The nominal sensitivity value is 1000mV/g if VVS 5 . The zero bias is the accelerometeroutput if it is horizontal, and it is 2.5V nominally.
The allowed pitch and roll value is -45 +45 cos > 0-15 +15 cos > 0
So
2
2
sin1cos)cos/()_(sin
sin1cos)/()_(sin
gysensitivitbiaszeroAY
gysensitivitbiaszeroAX(16)
In this case, we can use the square root function to get the sine from the cosine.
2.6 Calculate heading angle
We now have all the value needed. With formula 17,
3331
331
3331
coscossincossin
sincos
cossinsinsincos
ZYXZ
ZYY
ZYXX
HHHH
HHH
HHHH
With
2sin1cos
)/()_(sin
gysensitivitbiaszeroAX
2sin1cos
)cos/()_(sin
sensitivitbiaszeorAY
2
3
2
3
2
3 YXZ HHHH
We can get the value of the magnetic components in horizontal.
Because:
sin
cos
1
1
HY
HX
HH
HH
-
8/8/2019 Compass Thesis 2010
24/102
Development of an Electronic Compass
24
So the heading angle is: 11 /cos/sintan XY HH 9090),/tan( 11 XY HHa
We use the following formula to transfer the heading angle to 360~0 . The heading is thedegree we want to display. The is the angle we get from the arc tangent function.
0.180heading if 01 XH
0.360heading if 0,0 11 YX HH In other cases, heading
The detailed explanation for the above transformation is in chapter 4.10.
2.7 Problem: the sign of the HZ3
Only the value HX3 and HY3 for H-measurement can be known directed from sensor that fixed
on the electronic compass. The HZ3 can be calculated as follows:
2
3
2
3
2
3
22
3
2
3
2
3
YXZ
ZYX
HHHH
HHHH
But in the calculation, HZ3 is considered positive. The allowed pith angle is 45, and theallowed roll angle is 15. So we must be sure that in the pitch angle range and the roll anglerange, HZ3 is positive all the time. The following two figures show the situation, when the
electronic compass has largest pitch.
Figure 21: HZ3 when the pitch angle is 45 .
geog.North
Worst negative pitchZ
X
H
Hz3
-
8/8/2019 Compass Thesis 2010
25/102
Development of an Electronic Compass
25
Figure 22: HZ3 when the pitch angle is 45 .
So HZ3 should be positive even in the worst case. We checked the allowed value range when
is 0~360 and is +15 and -15. The allowed range of the value means, for example,
is 15 and =15 , in this range, HZ3 is positive all the time.
The heading
angle ()
The allowed range of pitch
angle when =15 ()The allowed range of pitch
angle when = -15 ()
0 >-65 () >-65 ()
15 >-68 >-64
30 >-72 >-6545 >-77 >-67
60 >-83 >-71
75 >-90 >-71
90 -90
-
8/8/2019 Compass Thesis 2010
26/102
Development of an Electronic Compass
26
We can see the minimum allowed value is period and larger than -45(the minimum value that
the user will turn) whatever equals to any value. But when is -15 and is 0~30, the
value is critical. So I decrease the distance to 2.
() The allowed range of pitch
angle when = -15 ()2 >-64.8 ()
4 >-64.7
6 >-64.5
8 >-64.4
10 >-64.3
12 >-64.2
14 >-64.1
16 >-64.1
18 >-64.1
20 >-64.122 >-64.2
24 >-64.3
26 >-64.4
28 >-64.6
30 >-64.8
Table 2: Checking the allowed value when is from 2to 30.
From the above two tables, we can make sure that in the range -45 +45and -15 +15, value of HZ3 must be positive.
Literature
/Honeywell 2003/ www.ssec.honeywell.com
Internet text and figure
Honeywell International
2003
/Boll/ Boll Richard
Weichmagnetische WerkstoffeVacuumschmelze GmbH
Hanau, 1990
/Michael/ Michael J. Caruso
Application of Magnetic Sensor For Low Cost Compass System
Honeywell, SSEC
/Analog 2004/ Datasheet for the ADXL 203,
Analog Devices, Inc.
One Technology Way, P.O.Box.9106, Norwood, MA02062-9106, USA,2004
-
8/8/2019 Compass Thesis 2010
27/102
Development of an Electronic Compass
27
3 Hardware description
3.1 DC-DC converter
The system needs +5V as the positive power supply. For the old electronic compass, the +5V
power supply has strong ripples with +600mV for the maximum value and -400mV for the
minimum value. The noise of the power supply causes ripples of the accelerometer outputs and
also the magnetic circuit outputs that are input to the analog to digital converter (simply use
ADC instead below) of the microcontroller. So in the software for the old electronic compass,
the inputs for the ADC of the microcontroller are read 128 times and divided by 128 to get the
average. That needs lot of time. This situation is improved in the new electronic compass. The
maximum positive value is reduced to +3mV and the minimum negative value is -3mV.
We use the MAX 1706 to generate the +5V from battery input. The allowed range of thebattery voltage is from 0.7V to 5.5V. The circuit diagram is shown in figure 23.
Figure 23: The circuit diagram of the DC-DC converter.
There are two main functions of the Max1706. One is a step-up converter with step-up output
POUT. Another is a linear regulator with output LDO. The step-up converter generates an
adjustable output to supply both power circuitry and the internal low-dropout linear regulator.
The linear regulator steps down the output from the step-up converter and reduces switchingripples. The maximum output current is limited by the current available from the boost
converter and by the voltage different between OUT and LDO. We use a 22uF capacitor C6
with a low equivalent series resistance (ESR) at the output for low ripples. During power-up,
the linear regulator remains off until the step-up converter goes into regulation for the first
time. /MAXIM 97/
The linear regulator is working in track mode. Connecting TRACK to the step-up converter
output implements a tracking mode, that sets the step-up converter outputs to 300mV above the
linear-regulator output, improving efficiency. In track mode, the feedback for the step-up
converter is derived from the OUT pin. When TRACK is low, the step-up converter and linear
regulator are separately controlled by their respective feedback inputs, FB and FBLCO.
TRACK is a logic input with a 0.5Vout threshold, and should be hardwired or switched with a
-
8/8/2019 Compass Thesis 2010
28/102
Development of an Electronic Compass
28
slew rate exceeding 1V/us. VLDO must be set above 2.3V for track mode to operate properly.
/MAX IM 97/
On power-up with TRACK=OUT, the step-up converter initially uses the FB input to regulates
its output. After the step-up converter goes into regulation for the first time, the linear regulator
turns on. When the linear regulator reaches 2.3V, track mode is enabled and the step-upconverter is regulated to 300mV above the linear regulator output. /3/
To set the low-dropout linear-regulator output, we use a resistor voltage-divider connected to
FBLDO from LDO to GND. We set the output to be 5.0V using the following formula:
5554 31250.1
0.51 R
V
VR
V
VRR
FBLDO
LDO
, (17)
where VFBLDO, the linear-regulator feedback input, is 1.250V. The above formula is from the
datasheet of Max1706 by MAXIM. Since the input bias current into FBLDO is less than 50nA,and R4 can be a large value. We choose
kR 4704 and kR 1505
With the above values, the linear regulator output is:
Vk
kV
R
RVV FBLDOLDO 17.51
150
470250.11
5
4
(18)
The step-up converter output POUT is above the linear regulator by 300mV and is 5.47V.
The inductor L2 with H330 is used to reduce the ripples to the value of mV3 as stated inchapter 3.1.1.
3.2 DC-DC inverter
We use the MAX1853 to realize the DC-DC inverter. It generates a negative output of
inV1 . The circuit diagram is shown in figure 24. The input voltage is +5V. The output is
5V. SHDN is driven to high for normal operation. The C1- ad C1+ is the negative and
positive terminal of the flying capacitor C1. The value of C1 and output capacitor C2 isrecommended in the datasheet. R17 and C19 are used for filtering.
Figure 24: The circuit diagram of the DC-DC inverter.
-
8/8/2019 Compass Thesis 2010
29/102
Development of an Electronic Compass
29
3.3 Tilt measurement (Accelerometer part)
3.3.1 Introduction of the tilt sensor
The pitch and roll value are measured by the accelerometer ADXL203 that is used as a
dual-axis tilt sensor. It uses the force of gravity as an input vector to determine the orientation
of an object in space. When the accelerometer is oriented in such way that both its X axis and
Y axis are initially parallel to the earth's surface, it can be used as a 2-axis tilt sensor with a roll
axis and a pitch axis. Once the output signals from the accelerometer have been converted to an
acceleration, that varies between -1g and +1g, the sine value of the pitch and roll angle are
calculated as: (/Analog 2004/ and chapter 2.5 of this thesis)
))cos(()_()sin(
)()_()sin(
pitchgysensitivitbiaszeroAYroll
gysensitivitbiaszeroAXpitch
(19)
The AX and AY are the accelerometer outputs from XOUT and YOUT. The zero bias is the
accelerometer output, if it is horizontal.
3.3.2 Circuit description
Figure 25: Circuit diagram of the tilt measurement.
The circuit diagram of this part is shown in figure 25. R2 and the capacitors C26 and C9 are
used to decouple the ADXL203 from power supply noise, as recommended in the datasheet.
The bandwidth of the accelerometer output is selected by capacitor C13 and C8. These two
capacitors are added to implement low-pass filtering and noise reduction. The accelerometer
-
8/8/2019 Compass Thesis 2010
30/102
Development of an Electronic Compass
30
has an internal filter resistor kRfilt 32 for outX and outY . So the bandwidth of output is
calculated by:
CRf
filt
dB
2
13 /Analog 2004/ (20)
We choose the bandwidth to be 3.3Hz by using a 1.5uF filter capacitor. The Xout and Yout varyfrom 1.5V to 3.5V at -1g and +1g, respectively. Because the reference voltage of the
microcontroller is 2.5V, the Xout and Yout have to be below 2.5V. The voltage dividers (R11
and R10, R14 and R19 respectively) realize this function. So the range of the voltage, which isinput to the ADC of is reduced to value between 0.75V~1.75V. The voltage followers (IC3A,
IC3B) after the voltage dividers are used as a buffer to eliminate loading effects.
The outputs sensitivity varies proportionally to supply voltage. According to the datasheet of
ADXL203, at VVS 5 , the sensitivity is gmV/1000 . At VVS 3 , it is gmV/560 . The
zero g bias output is also ratiometric, so the zero g output is nominally equal to 2/S
V at all
supply voltages. In the software, after every 10 times of the heading calculation, the supply
voltage of the accelerometer is read once to adjust the sensitivity, if necessary.
Because the output of accelerometer is very sensitive with respect to the power supply voltage(see above), a power testing circuit is necessary. The reference voltage of the microcontroller is
2.5V and the power testing signal has to be below 2.5V in order to be used as input to the ADC.
The voltage at the supply power pin Vs of accelerometer is about 5.0V. It is divided by a factorof 2.79 by a voltage divider and then inputs to the ADC of microcontroller after a voltagefollower.
3.4 Signal generation
3.4.1 Clock signal generation
The signal generation is divided to 3 parts: clock signal generation, switch signal generation
and sinusoidal signal generation. We introduce the clock signal generation part first.
Figure 26: The circuit diagram of the clock signal generation.
-
8/8/2019 Compass Thesis 2010
31/102
Development of an Electronic Compass
31
The circuit diagram of the clock signal generation is shown in figure 26. The clock of thewhole system is generated by a 555 timer circuit. The frequency of the output is determined as
follows:
1924230 2
43.1
CRRRf
trimm /National 2000/ (21)
The trim resistor is used to adjust the output frequency, in order to get output signal with
frequency 04f (the reason is explained in chapter 3.4.3.2). This frequency is determined by
the operation frequency of the magnetic field detector circuit. The values of the components
are set as follows: kR 5.123 , kR 1024 and nC 1019
The trim resistor is kRtrimm 1 . By adjusting this resistor, the frequency of the output signal canbe set from 6651Hz to 6085Hz.
3.4.2 Switch signal generation
The second part is the switch signal generation. The circuit diagram is shown in figure 27.
Figure 27: The circuit diagram of the switch signal generation.
The clock signal generated by the timer 555 is the input to an 8 bit counter to generate 4 signals
with frequency 02f , 0f , 4/0f and 64/0f . With the first counter, the signals withfrequency 02f , 0f , 4/0f are generated. The functions of these signals are follows: We
require a 50% duty cycle signal. However, the output signal of the 555 is not a 50% duty cycle
signal. So the frequency of the 555 circuit output signal is first reduced by a counter
(MM74HC393) by a factor of two, which is 02 f (3183Hz). This signal is named U_2F. It is
used in the synchronous rectifier part. The signal with frequency 0f (1591Hz) is used to
generate the sinusoidal signal. The signal with frequency 4/0f is used to generate a delay
between the sensor and controller activation. (see chapter 3.9.1)
The signal with frequency 4/0
f is also the input to the second counter to generate the signal
with frequency 64/0f . This 50% duty cycle signal controls, that only one sensor is active at
one time.
-
8/8/2019 Compass Thesis 2010
32/102
Development of an Electronic Compass
32
The following part consists of a D-flip flop and NOR gates. The purpose of this part is to
generate additional two switch signals with frequency 64/0f , that are needed for activating
the controllers. These two signals are called UZ_N/S and UZ_E/W. The generation of thesignals UZ_N/S and UZ_E/W is described now.
The 4/0f signal inputs to a D flip flop, that is also called delay flip flop. The delay flip-flop
transfers whatever is at the input D to the output Q. This does not happen immediately, butonly happen on a rising clock pulse (i.e. as CLK goes from 0 to 1). The input is thus delayed by
up to a clock pulse before appearing at the output. (see figure 28)
Figure 28: Generation of the controller switching signals. /Mayr 2003/ When the signalUZ_E/W is high, the sensor E/W is active. When the signal UZ_N/S is high, the sensor N/S is
active. From the above figure we can see, that only one sensor is activated at a time.
The signals UZ_N/S and UZ_E/W are generated by 4 NOR gates. There are two input signals
for the gates. One is the sensor switch signal (input of the D flip flop), another is the output of
the D flip flop. Call the two inputs A and B for simplification. The expression of UZ_N/S andUZ_E/W are as follows:
BABAWEUZ / _ (22)
BABASNUZ /_
The reason that to generate two such signals will be explained in detain in chapter 3.6.
CLK
Sensor
switch signal
Output Q of
D flip flop
UZ_E/W
UZ_N/S
Sensor E/W
active
Sensor N/S
active
-
8/8/2019 Compass Thesis 2010
33/102
Development of an Electronic Compass
33
3.4.3 Sinusoidal signal generation
3.4.3.1 The Fourier Transform of the 50% duty cycle signal
We use a 4th order low pass filter to generate a low THD sinusoidal voltage from a square
signal. The THD of the sinusoidal output signal shall be less than 0.05%. This filter is realized
by two 2 order Sallen & Key filters. The calculations below are from Theorie & Design eines
Tiefpassfilter mit Q>1. /Andreas/
Figure 29: 50% square input for the low pass filter.
The input of the low pass filter is shown in figure 29. As a Fourier series we get
1
000 ))sin()cos((k
kk tkbtkayy (23)
With T
k dttktyT
a0
0 )cos()(2 T
k dttktyT
b0
0 )sin()(2 for ...5,3,1k (24)
We getk
Ubk
04 for ...5,3,1k and 00 y , 0ka , 022 kk ba for ...6,4,2k
So the amplitude of the partial waves in the signal is:
00
1 2732.14
UU
b
(25a) 00
2 4244.03
4U
Ub
(25b)
00
3 2546.05
4 UUb
(25c) 00
4 1819.074 UUb
(25d)
3.4.3.2 Design the low pass filter
We use the Sallen & Key Filter to realize the function. The typical circuit of the Sallye & Key
filter is shown in figure 30.
U
U0
U0
T
t
-
8/8/2019 Compass Thesis 2010
34/102
Development of an Electronic Compass
34
Figure 30: Salley & Key Filter
We use the same value resistors and capacitors.
kRRR 1021 and nFCCC 1021
Figure 31: Simulation the logUout with PSPICE. The 1Q at the frequency Hzf 15910
We can calculate the transfer functions )(1 jH , )(2 jH of the two equal Sallen & Key
Filters.
2
0
2
0
211
1
)()(
Q
j
KjHjH (26)
For the two filters 21 HHH
The transfer function at RC10 of one Sallen & Key filter is for high Q
-
8/8/2019 Compass Thesis 2010
35/102
Development of an Electronic Compass
35
QKHH )()( 0201
So the transfer function at 0 of two equal Sallen & Key Filters is
2
02010 )()()()( QKHHH (27)
The transfer function at 03 of two equal Sallen & Key Filters is
2
2
2
2
2
2
2
0
2
02
2
0
2
0
2
2
0
22
2
0
2
2
02010
9)8(9
1)91(
)3(1)
)3(1(
1)1(
)3()3()3(
Q
K
Q
K
Q
K
Q
KHHH
(33)
The THD of the sinusoidal output shall be less than 0.05%. We get approximately
0005.0
...
...
1
3
2
4
2
3
2
2
2
1
2
4
2
3
2
2
u
u
UUUU
UUU(28)
1u and 3u are the amplitudes of the partial waves at 0 and 03 in the output.Their ration is
)(
)3(
01
03
1
3
Hb
Hb
u
u
If we use formula 29, 32 and 33 to instead of 1b , 3b , )( 0H and )3( 0H , we get
0005.0
27192
1
3)964(
1
4
3)964(
4
4
964
3
4
22
0
22
2
0
22
220
2
2
0
1
3
QQUKQ
Q
UQK
KQU
Q
KU
u
u
This is equal to 200027192 2 Q 276.102 Q 206.3Q
For a Sallen & Key filters with CCRR 121 , , the Q- factor is given byk
Q
3
1.
So that we get 69.2206.3
13
13
QK
The value of K depends on the 3R and 4R ,4
31R
RK .
-
8/8/2019 Compass Thesis 2010
36/102
Development of an Electronic Compass
36
It follows, that )1(43 KRR 43 69.1 RR
We decide to use two resistors with following value:
kR 1003 and kR 564
The value of K then is: 786.256
10011
4
3 k
k
R
RK ,
and the Q- factor of the filter is 67.4786.23
1
3
1
KQ
This is sufficient, since it is only required, that 206.3Q .
3.4.3.3 Design the voltage divider.
The transfer factor of the entire low pass filter at 0 should be 1 . But according to theabove calculation, we have
1301.1367.4786.2)()( 0201 QKHH
So 16913)()()( 202010 HHH
The operation amplifier would limit the output signal to not be sinusoidal any longer. So we
need to add a voltage divider with the relation 13/1/' inin UU before the low pass filter. The
circuit diagram of the voltage divider and low pass filter is shown in figure 32.
Figure 32: The circuit diagram of the voltage divider and low pass filter. The equivalent
resistance of the left two parallel resistors ( aR and bR ) is the output impedance of the
equivalent circuit for the voltage divider.
The R should be the same value as R1.
-
8/8/2019 Compass Thesis 2010
37/102
Development of an Electronic Compass
37
k
RR
RRR
ba
ba 10' (29)
Because 13/1/' inin UU , we get
13
1'
ba
b
in
in
RR
R
U
U kRb 10
13
12 kRb 833.10
We use two resistors Rb1 and Rb2 to combine k833.10 .
kRb 101 and 5602bR to get kRRR bbb 56.1021
For aR we get: kRR ba 12012
The final design of the two Sallen & Key filters with voltage dividers is shown in figure 33.
Figure 33: Generation of the sinusoidal signal by two Sallen & Key Filters.
3.4.3.4 All pass filter network and amplification for the sinusoidal signal
Figure 34: The circuit diagram of the phase adjustment and amplitude amplifier.
The circuit diagram of the phase adjustment stage and amplitude amplifier is shown above.
The reason for using the phase adjustment is explained in chapter 3.8.
The C19 and C13 are parellel connected. The equal capacitance C is:
-
8/8/2019 Compass Thesis 2010
38/102
Development of an Electronic Compass
38
nCCC 101319 (30)
The theory of the all pass filter network for phase adjustment shall be given now. /Mayr 2004/
The voltage at the non inverting input is given by
1
1_
1
1_
1
1
1
1
UCRj
U
CjR
CjU
TrimmTrimm
(31)
And the voltage drop at the feed back resistor is
UU
k
UUk
R
UURIRUFB 1
1
27
110110
1010 (32)
From a loop around the circuit we get 02 UUU FB
Because the both inputs of an ideal Op Amp are at the same potential UU
We get
1
1_
1_
1
1_
1_
1
1_
1
1_
11
1_
2
1
1
1
12
11
2
1
1
1
1
U
CRj
CRjU
CRj
CRj
UCRj
UCRj
UUCRj
UUU
Trimm
Trimm
Trimm
Trimm
TrimmTrimmTrimm
FB
(33)
The phase shift therefore is
)arctan(2arctan20
CRTrimm
if we set CRTrimm 1_0 /1 (34)
The circuit after the phase adjustment is an inverting amplifier. The capacitor C9 is to filter the
DC zero_bias. The gain is given by:
22_ RRK Trimm
-
8/8/2019 Compass Thesis 2010
39/102
Development of an Electronic Compass
39
3.5 Sensor model
3.5.1 The material and the structure of sensors
Figure35: The photo of the magnetic sensor.
The structure of the sensors has been shown in chapter 1.3. The sensors are made by a ceramic
tube with a metallic glass in it. It contains two equal coils, made of 0.05, copper wire. The
input of the excitation coil is a low THD sinusoidal current with frequency 0f . There are two
sensors in the system. One in east, west direction is called sensor E/W. Another in north, south
direction is called sensor N/S.
3.5.2 Sensor output signal
The metallic glass is magnetically very soft and non linear. This causes a non linear
dependence of the magnetic flux density B within the soft magnetic material as function of the
magnetic field H. There are two influence of the soft magnetic material. One is the actual
magnetic flux density does not only depend on the current magnetic field H, but also on the
entire history of H, which is described by the famous hysteresis loop. The second influence is
the generation of harmonics. The output will contain additional frequency components with
frequencies of ,...5,4,3,20 fn , if 0f is the input signal frequency.
Figure 36: The output from the magnetic sensor and its Spectrum when there is static
magnetic field. /Compass 2003/
-
8/8/2019 Compass Thesis 2010
40/102
Development of an Electronic Compass
40
If there is static magnetic field component along the sensor axis, then there are harmonics with
frequency ,...6,4,2 ooo fff (see figure 36). Otherwise, there are no harmonics (see figure 37).
The integral controller in the magnetic detector circuit generates an zero_bias current to
compensate the static magnetic field component of the earths magnetic field. So the output of
the controller can be used to measure the magnetic earth field along the sensor axis. Thecriterion for compensation is, that the 02f frequency component vanishes. The 02f
component is used, because it has the highest amplitude of the even harmonics.
Figure 37: The output from the magnetic sensor and its Spectrum when there is no static
magnetic field. /Compass 2003/
3.6 Sensor activation
3.6.1 Switch signal to active one sensor at a time
Only one sensor is active at a time to avoid the influence of each other. This is realized by a
switch between the sinusoidal sensor excitation signal and 0V. A multiplexer 74HC4053 isused to realize the switching function.
74HC4053 are triple 2-channel analog multiplexers with a common enable input (E). Eachmultiplexer has two independent inputs (nY0 and nY1), a common output (nZ) and three
switch control inputs (S1 to S3).
With E low, the switches can be controlled by S1 to S3.
With E HIGH, all switches are in the high impedance OFF-state, independent of S1 to S3.
-
8/8/2019 Compass Thesis 2010
41/102
Development of an Electronic Compass
41
Inputs
E nS Channel on
L
L
H
L
H
X
nY0 nZ
nY1 nZ
none
Table 3: The function table of 74HC4053 /PHILIPS/
There are three channels used. The control inputs of three channels (S1 to S3) are the signal
called sensor switch signal Uy.
For channel one, the input 1Y0 is connected to GND and another input 1Y1 is connected to a
sinusoidal signal with frequency 0f . When the sensor switch signal Uy is low, the output 1Z
is GND. Otherwise; the 1Z is the sinusoidal signal. The output is used to active the E/W
sensor.
For channel two, the input 2Y0 is connected to the sinusoidal signal. Another input 2Y1 is
GND. The situation in channel two is opposite to channel 1. When the sensor switch signal Uy
is low, the output 2Z is the sinusoidal signal. Otherwise, it is GND. The output of channel two
is used to active the N/S sensor.
In channel three, the output signals from the two sensors are connected to the inputs 3Y0 and
3Y1. So the output 3Z is always the output of the currently active sensor.
1591Hz_sine
Sensor switch sensor N/S active
Signal Uy sensor E/W active
About 25Hz
The output of
channel one,
1Z
The output of
channel two,
2Z
Figure 38: Sensor activation switch signal.
-
8/8/2019 Compass Thesis 2010
42/102
Development of an Electronic Compass
42
3.6.2 Switch the sensor output signal
Since the switching behavior of the sensor input signal, the output of one sensor appears one
half of every period, while the output of another sensor appears another half of the period. We
need to switch two outputs to one signal, because the following low pass filter and gainadjustment exist only once. This function is also realized by the multiplexer 74HC4053. The
principle diagram is shown in figure 39. The signals from E/W sensor and N/S sensor are
mixed into one signal called sensor output signal.
Sensor switch signal Uy
Sensor output
signal
Figure 39: Sensor output switch
3.7 Low pass filter and non-inverting amplifier for the sensor
output signal
The sensor output signal inputs to a low pass filter to attenuate the higher harmonics of thesensor output signal with frequencies higher than 02f . This improves the performance of the
synchronous rectifier, where higher harmonics would also contribute to its output signal (see
chapter 3.8)
Since the filters Q- factor is 2, the frequency component with frequency
0233887.4102
1fHz
knFf
is amplified by a factor of 2 compared to a filter with
an initially completely feat amplitude response like a Bufferworth type low pass filter.
Figure 40: Circuit diagram of the low pass filter and non-inverting amplifier.
Signal from E/W
sensor
Signal from
N/S sensor
-
8/8/2019 Compass Thesis 2010
43/102
Development of an Electronic Compass
43
After the low pass filter is a non-inverting amplifier. The amplitude is amplified by the
following factor:
2.318
1813
R
RRK
3.8 Synchronous rectifier
3.8.1 The function of synchronous rectifier
Because of the non linear behavior of the sensor material, the output from sensors is a
combined of signals with many harmonics of the base signal. The base signal frequency
depends on the sensor generation signal frequency that is 0f (1591Hz). So the output contains
the sinusoidal signal with frequency 0f , 02 f , 04 f , 0nf , ...2,1n Experiments show that the
second harmonic (frequency 02 f ) is the even harmonic with the highest level. So the
amplitude of the second harmonic is the best suited for using as quantity to measure magnetic
field. /Mayr 2003/
H is not only necessary to measure the component of the 2nd harmonic at Hzf 159122 0 , butalso its phase. The controller, that generates the zero_bias current of the excitation coil must
know, whether to increase or to decrease the zero_bias current in order to get zero amplitude of
the 2nd harmonic. Fortunately, the second harmonic changes its phase by 180 , when thecomponent of the earth magnetic field along the sensor axis changes its direction. In a
simplified figure that looks as follows:
Figure 41: The synchronous rectifier
-
8/8/2019 Compass Thesis 2010
44/102
Development of an Electronic Compass
44
3.8.2 Mathematical description of the synchronous rectifier
The Uout is multiplied with Uin like in figure 42.
Figure 42: The diagram of signal multiplexer.
The synchronous rectifier acts like a mixer. The following calculation is from Synchronous
rectifier by Milan. /Milan/
ctrlinout nUU (35)
The ctrln controls the switch, the zero_bias in inU is described by ctrls .
We define the input signal as follows:
ctrlctrl
ctrlctrlctrl
ininin
nnt
nnt
tsn
tUU
2,1
,1
)(
)sin(
(36)
sctrl is a rectangular signal that can be described by Fourier transform.
0 ))12sin((1214
nctrlctrl tnns for ...3,2,1,0n (37)
So we can get the description of Uout
0
))12sin((12
14)sin(
n
ctrlinin
ctrlinout
tnn
tU
UUU
(38)
outU is used as input to a integral controller. For its output mainly the DC- part of outU is
important, called outU .
-
8/8/2019 Compass Thesis 2010
45/102
-
8/8/2019 Compass Thesis 2010
46/102
Development of an Electronic Compass
46
For the second harmonic signal: ctrlin ,
cos2
inout UU
The other harmonics can be neglected. The phase difference can be adjusted in the
sinusoidal generation circuit part by the all pas filter network to get the maximum of cos .
So, this output from synchronous rectifier is suited to input to an integral controller to calculate
the history of the second harmonic.
3.8.3 How to realize the function by hardware?
The block diagram is shown in figure 43. The input signal Uin is a combined of the base signal
of the sensor output (1591Hz sinusoidal signal) and the second harmonic. The Uin inputs to an
inverting amplifier. The amplitude doesnt change. The switch between the Uin and its
inverting signal is controlled by signal Uctrl, which is a square signal with frequency 3182Hz.
Figure 43: The block diagram of synchronous rectifier.
The switch function is realized by a multiplexer 74HC4053. The circuit diagram is shown in
figure 44. In channel one, the Uin and its inverting signal Uin are connected to two individual
inputs 1Y1 and 1Y0. The switch between Uin and Uin is controlled by Uctrl. The output of this
channel is Uout.
Figure 44: The circuit diagram of the switch.
-
8/8/2019 Compass Thesis 2010
47/102
Development of an Electronic Compass
47
3.9 Integral controller
3.9.1 Controller activation signal switch
Because of the transient behavior of the low pass filter during the switching process, the
controller will be disturbed. So two additional switch signals are needed to activate the integral
controllerat a certain time after the switching over. How to generate these controller activation
signals is described in 3.4.2 Switch signal generation.
The two sensors output signals are mixed in one signal. The function of the switch is to pick up
the signal from one sensor to input to certain integral controller. Like, pick up the part from
E/W sensor and then input to the E/W integral controller. The principle diagram of this
function is shown in figure 45.
Figure 45: The principle of the controller activation signal switch
Signal UZ_E/W and UZ_N/S control the switch behavior. The frequency is about 25Hz. When
the signal UZ_E/W is high, the E/W integral controller is active. At this time, the signal
UZ_N/S is low and the N/S integral controller output remains sensitivityant. And when the
signal UZ_N/S is high, the N/S integral controller is active. At that time, the E/W integral
controller output is sensitivityant.
This switch function is realized by the multiplexer 74HC4053.
Figure 46: The circuit diagram of the integral controller input signal switch.
-
8/8/2019 Compass Thesis 2010
48/102
Development of an Electronic Compass
48
3.9.2 Design the integral controller
Figure 47: Circuit diagram of the integral controller
The reason to choose integral controller is in chapter 1.7. The controller integrates the input
signal to produce the output signal. Integration is obtained by reversing the resistor and the
capacitor. For an ideal operational amplifier, there is no current into or out of any input. Since
the inverting input is at virtual ground, the current through R must flow to the capacitor C. Sothe output voltage is:
t
inoutout dttURC
tUtU0
')'(1
)0()( (44)
TheRC
1 is the gain that is -45.45 in our case.
3.10 U/I converter
Figure 48: Circuit diagram of U/I converter.
-
8/8/2019 Compass Thesis 2010
49/102
Development of an Electronic Compass
49
The sensors are excited by a current through the excitation coil, so an U/I converter is needed.
There are 3 inputs for the U/I converter. U1 is the controller output. It is a DC voltage. U2 is a
sinusoidal voltage signal with frequency Hzf 15910 . In one period, this signal is active forabout 20ms and then becomes 0V for 20ms. This is controlled by the sensor switch signal
which frequency is Hzf 85.2464/0 . This function is used to activate two sensors one byone. U3 is the zero_bias voltage. It is used for adjusting the controller output, to be symmetric
with respect to ground.
The relation between the non inverting input of the Op Amp and three input signals can be
calculated as follows: /Milan 2/
03
3
2
2
1
1
R
UU
R
UU
R
UU(45)
From this formula we can get
213132
321231132
RRRRRR
URRURRURRU
(46)
Assume the following: 1*
1 RR , 2*
2 RR and 3*
3 RR
Because*
1R ,*
2R and*
3R are parallel connected with each other, the equivalent resistance of
these resistor is as follows:
*
3
*
2
*
1
*
2
*
1
*
3
*
1
*
3
*
2
*
3
*
2
*
1
*2
*1
*3
*1
*3
*2
*
3
*
2
*
1
111
RRR
RRRRRRU
R
UI
RRR
RRRRRR
RRRR
sum
sum
(47)
We use 1R , 2R and 3R to express*
1R ,*
2R and*
3R , and get
321
213132
321
3
21
2
31
2
32
21
RRR
RRRRRRU
RRR
RRRRRRUI
(48)
Because for an ideal operational amplifier, we have UU
We get
*
3
3
*
2
2
*
1
1
3
3
2
2
1
1
321
321231132
321
213132
213132
321231132
1
11
R
U
R
U
R
U
R
U
R
U
R
U
RRR
URRURRURR
RRR
RRRRRR
RRRRRR
URRURRURRI
(49)
-
8/8/2019 Compass Thesis 2010
50/102
Development of an Electronic Compass
50
So the output current is determined by the input voltage and the in parallel connected output
resistors. The value of is set as:
01.0 , kRR 10021 and MR 13
kRR 1** 21 , kR 10*3
The R4 and C1 are used to make the circuit stable, since the sensor acts as an inductive load,
and so the phase margin is very low.
3.11 DC zero_bias generation
The signal from the integral controller is polar, from about -1.5V to +1.5V. The positive and
negative parts are symmetric. The allowed range for the input of the ADC is 0V~+2.5V. The
DC zero_bias is used to fulfill the requirement. The circuit diagram is shown in figure 49. Thesignal from the integral controller is called Ucontroller. The DC zero_bias voltage is called Vref. It
is the reference voltage of the microcontroller, about 2.5V. The output signal with DC
zero_bias is called UADC. It is used as input to a voltage follower and then to the ADC.
Figure 49: The circuit diagram of the DC zero_bias generation
The voltage of UADC is calculated as follows:
k
VU
k
UU refADCADCcontroller
200200
2
refcontroller
ADC
VUU
(50)
Because VVref 5.2 , we get VU
U controllerADC 25.12
(51)
If Ucontrollervaries in the range from -1.5V to +1.5V, the ADC input voltage will have values
between +0.5V and +2V. It is suitable to input to the ADC.
-
8/8/2019 Compass Thesis 2010
51/102
Development of an Electronic Compass
51
3.12 Microcontroller part
The microcontroller is ADuC832. It has embedded 12 bits ADCs and DACs. The ADCs is
used to convert the analog signals of the tilt measurement circuit outputs and the magnetic field
detector circuit outputs from analog to digital. The microcontroller is connected to the displaywith, its P0 and P2 port. There is also a connection for downloading programs via the serial
interface.
Figure 50: The connection of the microcontroller
Pin no. Name Function1 ADC0 ADC channel 0. The component of the earth magnetic field
in the N/S sensor direction is used to as input to this pin.
2 ADC1 ADC channel 1. The component of the earth magnetic field
in the E/W sensor direction is used to as input to this pin.
3 ADC2 ADC channel 2. The tilt measurement circuit output in X
direction is used as input to this pin. It is used for the tilt
measurement.
4 ADC3 ADC channel 3. The tilt measurement circuit output in Y
direction is used as input to this pin. It is used for the tilt
measurement.
5 AVDD Analog power supply.6 AGND Analog ground.
7 CREF Decoupling Input for On-Chip voltage reference. A 0.1uF
-
8/8/2019 Compass Thesis 2010
52/102
Development of an Electronic Compass
52
capacitor is connected between this pin and AGND.
8 VREF Reference Output. It is used as a reference voltage for the
DC-zero_bias generation circuit.
9 DAC0 Not used.
10 DAC1 Not used.
11 ADC14 ADC channel 4. Test power supply from the accelerometerinputs to this pin. Its for testing the supply voltage of the
accelerometer and adjusting the zero bias and sensitivity of
the outputs.
12 P1.5/ADC5 Not used.
13 P1.6/ADC6 Not used.
14 P1.7/ADC7 Not used.
15 RESET Reset for down loading the program.
16 RXD Data Input/Output of /serial Port. RXD and TXD are used or
down loading the program.
17 TXD Clock Output of Serial Port.
18 P3.2 Not used.
19 P3.3 Not used.
20 DVDD Digital power supply.
21 DGND Digital ground.
22 P3.4 Not used.
23 P3.5 Not used.
24 P3.6 Not used.
25 P3.7 Not used.
26 SCLCOK Not used.
27 SDATA Not used.
28 P2.0 Port 2.0. It is connected to the enable signal of the display.29 P2.1 Port 2.1. It is connected to the data read/write of the display.
30 P2.2 Port 2.2. It is connected to the register select signal of the
display.
31 P2.3 Not used.
32 XTAL1 There is a 32.768 kHz crystal connected between XTAL1
and XTAL2.
33 XTAL2 See XTAL2.
34 DVDD Digital power supply.
35 DGND Digital ground.
36 P2.4 Not used.37 P2.5 Not used.
38 P2.6 Not used.
39 P2.7 Not used.
40 EA External Access Enable. A 1k resistor is connected between
this pin and DVDD to enable the compas