
Compact and Stable Discontinuous Galerkin Methods for...
50
Motivation Theoretical results Numerical results Summary Albert-Ludwigs-Universit¨ at Freiburg Compact and Stable Discontinuous Galerkin Methods for Convection-Diffusion Problems S. BRDAR JOINT WORK WITH R. KL ¨ OFKORN AND A. DEDNER Int. MetStr ¨ om Conference, June 7, 2011 Berlin Brdar, Dedner, Kl¨ ofkorn Compact and Stable DG methods MetStr ¨ om 1 / 27
Transcript of Compact and Stable Discontinuous Galerkin Methods for...
Motivation
Theoreticalresults
Numericalresults
Summary
Albert-Ludwigs-Universitat Freiburg
Compact and Stable Discontinuous GalerkinMethods for Convection-Diffusion Problems
S. BRDAR
JOINT WORK WITH R. KLOFKORN AND A. DEDNER
Int. MetStrom Conference,June 7, 2011
Berlin
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 1 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Outline
Motivation
Theoretical results
Numerical results
Summary
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 2 / 27

Motivation
Theoretical results
Numerical results
Summary

Motivation
Theoreticalresults
Numericalresults
Summary
DG methods for convection-diffusion problems
Brief history
I Douglas and Dupont 1976: elliptic and parabolic PDEsI Cockburn, Shu et al 1998: nonlinear parabolic PDE for conservation laws
Advantages of DG methodsI easy to achieve higher order without enlarging stencilI easy construction of discrete function spacesI easy extension on non-conforming meshesI efficient parallelization
Disadvantages of DG methodsI high number of unknowns (Navier-Stokes in 3d, 3rd order→ 50 unknowns
per mesh element)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 4 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG methods for convection-diffusion problems
Brief history
I Douglas and Dupont 1976: elliptic and parabolic PDEsI Cockburn, Shu et al 1998: nonlinear parabolic PDE for conservation laws
Advantages of DG methodsI easy to achieve higher order without enlarging stencilI easy construction of discrete function spacesI easy extension on non-conforming meshesI efficient parallelization
Disadvantages of DG methodsI high number of unknowns (Navier-Stokes in 3d, 3rd order→ 50 unknowns
per mesh element)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 4 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG methods for convection-diffusion problems
Brief history
I Douglas and Dupont 1976: elliptic and parabolic PDEsI Cockburn, Shu et al 1998: nonlinear parabolic PDE for conservation laws
Advantages of DG methodsI easy to achieve higher order without enlarging stencilI easy construction of discrete function spacesI easy extension on non-conforming meshesI efficient parallelization
Disadvantages of DG methodsI high number of unknowns (Navier-Stokes in 3d, 3rd order→ 50 unknowns
per mesh element)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 4 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?
I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)
F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?
I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)
F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)
F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Stencils of DG methods
I 1st order PDEs: compact stencil even for higher order
I 2nd order PDEs: compact stencil for higher order?I Interior Penalty (IP)
J. Douglas; T. Dupont Interior penalty procedures for elliptic and parabolic Galerkin methods(1976),
R. Hartmann; P. Houston An optimal order penalty discontinuous Galerkin discretization of
the compressible Navier-Stokes equations (2008)
I Bassi-Rebay 2 (BR2)F. Bassi; S. Rebay A high-order accurate discontinuous finite element method for thenumerical solution of the compressible Navier-Stokes equations (1997),
F. Bassi; S. Rebay; G. Mariotti; S. Pedinotti; M. Savini A high-order accurate discontinuous
finite element method for invisid turbomachinery flows (1997)
I Local Discontinuous Galerkin (LDG) !!!
B. Cockburn; C.-W. Shu The Local Discontinuous Galerkin method for time-dependent
convection-diffusion problems (1998)
I Compact Discontinuous Galerkin (CDG)
J. Peraire; P.-O. Persson The Compact Discontinuous Galerkin (CDG) method for elliptic
problems (2008)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 5 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Elliptic case.
The Poisson equation
−∆u = s in Ω,
u = gD on ∂Ω,
Ω ⊂ Rd, d ∈ N a bounded polygon, s ∈ Ld(Ω), gD ∈ Ld(∂Ω), andu : Rd → R.
Let ϕ and ψ be test functions and K ⊂ Ω
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 6 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Elliptic case.
The Poisson equation
σ = ∇u, −∇ · σ = s in Ω,
u = gD on ∂Ω,
Ω ⊂ Rd, d ∈ N a bounded polygon, s ∈ Ld(Ω), gD ∈ Ld(∂Ω), andu : Rd → R.
Let ϕ and ψ be test functions and K ⊂ Ω
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 6 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Elliptic case.
The Poisson equation
σ = ∇u, −∇ · σ = s in Ω,
u = gD on ∂Ω,
Ω ⊂ Rd, d ∈ N a bounded polygon, s ∈ Ld(Ω), gD ∈ Ld(∂Ω), andu : Rd → R.
Let ϕ and ψ be test functions and K ⊂ Ω
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 6 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG flux formulation
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
For a given partition Th into polygons we define
Pmk (Th) = v : v|K ∈ [Pk(K)]m, K ∈ Th for m ∈ N.
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(uh,∇ · ψ)K + 〈uh,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σh · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 7 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG flux formulation
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
For a given partition Th into polygons we define
Pmk (Th) = v : v|K ∈ [Pk(K)]m, K ∈ Th for m ∈ N.
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(uh,∇ · ψ)K + 〈uh,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σh · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 7 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG flux formulation
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
For a given partition Th into polygons we define
Pmk (Th) = v : v|K ∈ [Pk(K)]m, K ∈ Th for m ∈ N.
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(∇uh, ψ)K + 〈uh − u,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 7 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG flux formulation
(σ, ψ)K = −(u,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σ,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
For a given partition Th into polygons we define
Pmk (Th) = v : v|K ∈ [Pk(K)]m, K ∈ Th for m ∈ N.
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(∇uh, ψ)K + 〈uh − u,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 7 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG primal formulation 1
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(uh,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?Yes, if σ = σ(uh) (i.e. Arnold et al 2002).
DG primal formulation
Find uh ∈ Pk(Th) so that B(uh, ϕ) = (s, ϕ)Ω for all ϕ ∈ Pk(Th) with
B(uh, ϕ) = (∇uh,∇ψ)Ω −Xe∈Γ
〈[[uh]], ∇ϕ〉e + 〈σ, [[ϕ]]〉e
+Xe∈Γi
〈u− uh, [∇ϕ]〉e − 〈[σ], ϕ〉e .
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 8 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG primal formulation 1
DG flux formulation
Find uh ∈ Pk(Th) and σh ∈ Pdk (Th) so that
(σh, ψ)K = −(uh,∇ · ψ)K + 〈u,nK · ψ〉∂K ,(σh,∇ϕ)K = (s, ϕ)K + 〈σ · nK , ϕ〉∂K
for all ϕ ∈ Pk(K), ψ ∈ Pdk (K), and K ∈ Th.
Can we avoid computation of the intermediate variable σ?Yes, if σ = σ(uh) (i.e. Arnold et al 2002).
DG primal formulation
Find uh ∈ Pk(Th) so that B(uh, ϕ) = (s, ϕ)Ω for all ϕ ∈ Pk(Th) with
B(uh, ϕ) = (∇uh,∇ψ)Ω −Xe∈Γ
〈[[uh]], ∇ϕ〉e + 〈σ, [[ϕ]]〉e
+Xe∈Γi
〈u− uh, [∇ϕ]〉e − 〈[σ], ϕ〉e .
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 8 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
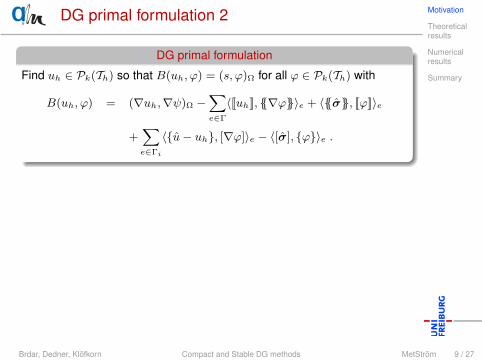
DG primal formulation 2
DG primal formulation
Find uh ∈ Pk(Th) so that B(uh, ϕ) = (s, ϕ)Ω for all ϕ ∈ Pk(Th) with
B(uh, ϕ) = (∇uh,∇ψ)Ω −Xe∈Γ
〈[[uh]], ∇ϕ〉e + 〈σ, [[ϕ]]〉e
+Xe∈Γi
〈u− uh, [∇ϕ]〉e − 〈[σ], ϕ〉e .
Jump and average. Let K−e ,K+e ∈ Th and e ∈ Γi
[[φ]]e = (ϕ|K−e− ϕ|
K+e
)nK−e
, [ξ]e = (ξ|K−e− ξ|
K+e
) · nK−e
φe = 1/2 (ϕ|K−e
+ ϕ|K+
e), ξe = 1/2 (ξ|
K−e+ ξ|
K+e
) .
If e ∈ Γ \ Γi
[[φ]]e = (ϕ|Ke − g′D)nKe , [ξ]e = ξ|Ke · nKe
φe = ϕ|Ke , ξe = ξ|Ke .
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 9 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG primal formulation 2
DG primal formulation
Find uh ∈ Pk(Th) so that B(uh, ϕ) = (s, ϕ)Ω for all ϕ ∈ Pk(Th) with
B(uh, ϕ) = (∇uh,∇ψ)Ω −Xe∈Γ
〈[[uh]], ∇ϕ〉e + 〈σ, [[ϕ]]〉e
+Xe∈Γi
〈u− uh, [∇ϕ]〉e − 〈[σ], ϕ〉e .
Jump and average. Let K−e ,K+e ∈ Th and e ∈ Γi
[[φ]]e = (ϕ|K−e− ϕ|
K+e
)nK−e
, [ξ]e = (ξ|K−e− ξ|
K+e
) · nK−e
φe = 1/2 (ϕ|K−e
+ ϕ|K+
e), ξe = 1/2 (ξ|
K−e+ ξ|
K+e
) .
If e ∈ Γ \ Γi
[[φ]]e = (ϕ|Ke − g′D)nKe , [ξ]e = ξ|Ke · nKe
φe = ϕ|Ke , ξe = ξ|Ke .
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 9 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG methods
Method u σ
IP uh ∇uh − η[[uh]]
BR2 uh ∇uh+χre([[uh]])
CDG uh − βe · [[uh]] ∇uh − η[[uh]] + βe[∇uh]+χ`Le(uh)+ βe[Le(uh)]
´CDG2 uh ∇uh − η[[uh]]
+χ`Le(uh)+ βe[Le(uh)]
´Parameter-free. Determine the penalty factor η and the lifting factor χ.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 10 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
DG methods
Method u σ
IP uh ∇uh − η[[uh]]
BR2 uh ∇uh+χre([[uh]])
CDG uh − βe · [[uh]] ∇uh − η[[uh]] + βe[∇uh]+χ`Le(uh)+ βe[Le(uh)]
´CDG2 uh ∇uh − η[[uh]]
+χ`Le(uh)+ βe[Le(uh)]
´Lifting. re, Le : [L2(e)]d → Pmk (Th) and le : L2(e)→ Pmk (Th) given as
(re(ξ), τ )Ω = −〈ξ, τ〉e, (le(φ), τ )Ω = −〈ψ, [τ ]〉e,Le(ξ) = re(ξ) + le(βe · ξ)
for all ξ, τ ∈ Pmk (Th) and φ ∈ Pk(Th).
Switch. βe induces ordering between adjacent grid elements.
βe = nK−e
/2 = −nK+
e/2
For CDG choose any w ∈ Rd such that w ·ne 6= 0, ∀ e the upwind switchis determined by w · n
K−e> 0.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 10 / 27

Motivation
Theoretical results
Numerical results
Summary

Motivation
Theoreticalresults
Numericalresults
Summary
Theory for linear elliptic problem.
A-priori estimate:For stable, bounded, consistent, and adjoint consistent methods thediscrete solution uh ∈ Vh of a linear elliptic problem (−∆u = 0) isestimated by
‖u− uh‖Ω ≤ Chk+1|u|k+1,Ω,
I C is a constantI k is the polynomial degree of the basis functions from Vh.I All the methods studied here fall into this category
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 12 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
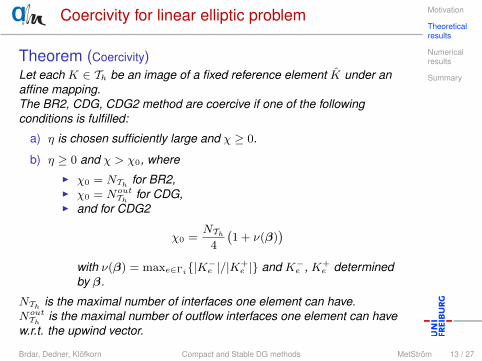
Coercivity for linear elliptic problem
Theorem (Coercivity)Let each K ∈ Th be an image of a fixed reference element K under anaffine mapping.The BR2, CDG, CDG2 method are coercive if one of the followingconditions is fulfilled:
a) η is chosen sufficiently large and χ ≥ 0.
b) η ≥ 0 and χ > χ0, whereI χ0 = NTh for BR2,I χ0 = Nout
Thfor CDG,
I and for CDG2
χ0 =NTh
4
`1 + ν(β)
´with ν(β) = maxe∈Γi|K−e |/|K+
e | and K−e , K+e determined
by β.
NTh is the maximal number of interfaces one element can have.NoutTh
is the maximal number of outflow interfaces one element can havew.r.t. the upwind vector.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 13 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
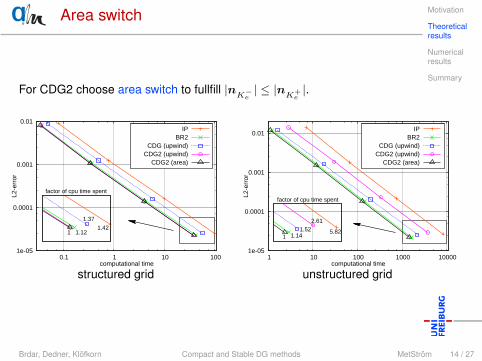
Area switch
For CDG2 choose area switch to fullfill |nK−e| ≤ |n
K+e|.
1e-05
0.0001
0.001
0.01
0.1 1 10 100
L2-e
rror
computational time
IPBR2
CDG (upwind)CDG2 (upwind)
CDG2 (area)
factor of cpu time spent
1 1.12
1.37
1.42
1e-05
0.0001
0.001
0.01
1 10 100 1000 10000
L2-e
rror
computational time
IPBR2
CDG (upwind)CDG2 (upwind)
CDG2 (area)
factor of cpu time spent
1 1.141.52
2.61
5.82
structured grid unstructured grid
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 14 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
BR2 vs CDG2 in linear case
Lemma (BR2 and CDG2 on special grids)Under the conditions of the Coercivity Theorem BR2 and CDG2 coincideon grids Th where each element is isometric to another if
χBR2 = 2 · χCDG2 .
Remark (BR2 and CDG2 on general grids)Consider the conditions of the Coercivity Theorem.
χBR2 = 2 · χCDG2 +NTh
2(1− ν(βe)) .
Remark (Evaluation of lifting operators)BR2 requires evaluation of the lifting operator re on both elementscontaining the edge e, whereas CDG2 requires evaluation of Le on onlyone element.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 15 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
BR2 vs CDG2 for non-affine grid mappings
1e-06
1e-05
10 100 1000
L2 -err
or
computation time
CDG2 (A)BR2 (A)
CDG2 (B)BR2 (B)
AScheme CPU time L2-errorCDG2 305 3.91e-07BR2 329 3.92e-07
BScheme CPU time L2-errorCDG2 1790 5.47e-07BR2 2469 5.46e-07
Figure: Comparison on affine (A) and non-affine (B) quadrilateral grids.Problem is on the quadrilateral domain with corners(0, 0), (1, 0), (1, 1), (0, 1) (A) and (0.4, 0), (1, 0), (1, 1.4), (0.1) (B). Thegraph (left) contains level 4 and 5 of the simulation cycle and the table(right) contains the numbers of the level 5 run.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 16 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
CDG coercivity for χ = 1?
In Peraire and Persson (2008) CDG has χ = 1.
Counterexample in 3D
In
Eymard, Henry, Herbin, Hubert, Klofkorn, and Manzini3D Benchmark on Discretization Schemes for Anisotropic Diffusion Problems onGeneral Grids (2011)
we get for Test Case 1 using grid tet.0.msh that the minimal eigenvalueof the stiffness matrix of the bilinear form B(uh, uh) is −12.167.
With theoretical values minimal eigenvalue is positive.
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 17 / 27

Motivation
Theoretical results
Numerical results
Summary

Motivation
Theoreticalresults
Numericalresults
Summary
Elliptic problem
Herbin, HubertBenchmark on discretization schemes for anisotropic diffusion problems ongeneral grids, FVCA, London (2008)
−∇ · (A∇u) = f on Ω = [0, 1]2,
u = g on ∂Ω,
A =
„1 00 ε
«, ε = 103,
with analytical solution u = g, where
g(x, y) = sin(2πx)e−2π√
1/εy.
I mesh1 of the benchmark,I CG solver is used,I IP uses η of Ainsworth, Rankin (2009).
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 19 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Efficiency
k = 1, 2, 3, χBR2 = 3, χCDG = 2, χCDG2 = 1.5
efficiency condition number
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 20 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
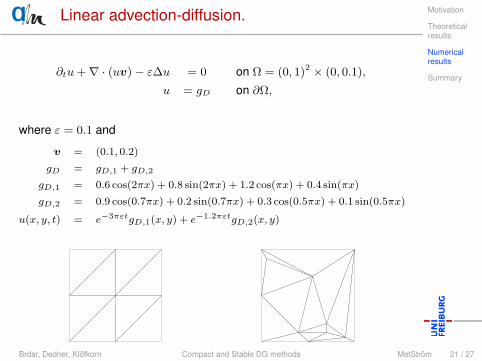
Linear advection-diffusion.
∂tu+∇ · (uv)− ε∆u = 0 on Ω = (0, 1)2 × (0, 0.1),
u = gD on ∂Ω,
where ε = 0.1 and
v = (0.1, 0.2)
gD = gD,1 + gD,2
gD,1 = 0.6 cos(2πx) + 0.8 sin(2πx) + 1.2 cos(πx) + 0.4 sin(πx)
gD,2 = 0.9 cos(0.7πx) + 0.2 sin(0.7πx) + 0.3 cos(0.5πx) + 0.1 sin(0.5πx)
u(x, y, t) = e−3πεtgD,1(x, y) + e−1.2πεtgD,2(x, y)
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 21 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Linear advection-diffusion.
k = 2 with 3rd order semi-implicit YZ(3,3) of Yoh and Zhong
1e-05
0.0001
0.001
0.01
0.1 1 10 100
L2-e
rror
computational time
IPBR2
CDG (upwind)CDG2 (upwind)
CDG2 (area)
factor of cpu time spent
1 1.12
1.37
1.42
1e-05
0.0001
0.001
0.01
1 10 100 1000 10000
L2-e
rror
computational time
IPBR2
CDG (upwind)CDG2 (upwind)
CDG2 (area)
factor of cpu time spent
1 1.141.52
2.61
5.82
structured grid unstructured grid
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 22 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Nonlinear convection-diffusion systems
Navier-Stokes equations,Analytical solution: C∞ solution from Lorcher, Gassner, Munz (2008),Grid: Unstructured triangular
1e-5
1e-4
1e-3
1e-2
1e-1
1e+0
1e-1 1e-0 1e+1 1e+2 1e+3 1e+4
L2-e
rror
computation time
k=1
k=2
k=3
BR2CDG
CDG2
1 1.12 1.58
factor of cpu time spent
1e+3
1e+4
1e+5
1e+6
96 384 1536 6144
GM
RE
S it
erat
ions
grid elements
BR2CDG
CDG2
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 23 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
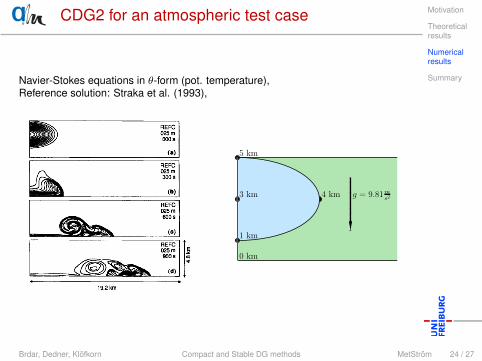
CDG2 for an atmospheric test case
Navier-Stokes equations in θ-form (pot. temperature),Reference solution: Straka et al. (1993),
5 km
4 km
1 km
g = 9.81ms2
0 km
3 km
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 24 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
CDG2 for an atmospheric test case
Navier-Stokes equations in θ-form (pot. temperature),Reference solution: Straka et al. (1993),
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 24 / 27
Motivation
Theoreticalresults
Numericalresults
Summary
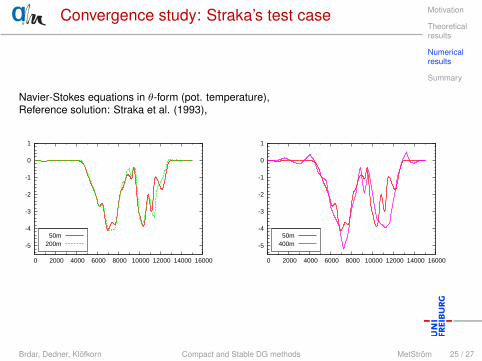
Convergence study: Straka’s test case
Navier-Stokes equations in θ-form (pot. temperature),Reference solution: Straka et al. (1993),
-5
-4
-3
-2
-1
0
1
0 2000 4000 6000 8000 10000 12000 14000 16000
50m200m -5
-4
-3
-2
-1
0
1
0 2000 4000 6000 8000 10000 12000 14000 16000
50m400m
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 25 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Convergence study: Straka’s test case
Navier-Stokes equations in θ-form (pot. temperature),Reference solution: Straka et al. (1993),
-5
-4
-3
-2
-1
0
1
0 2000 4000 6000 8000 10000 12000 14000 16000
50m200m -5
-4
-3
-2
-1
0
1
0 2000 4000 6000 8000 10000 12000 14000 16000
50m100m
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 25 / 27

Motivation
Theoretical results
Numerical results
Summary

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problems
I new parameter free method (CDG2) presentedI stability proven for linear heat equationI improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presented
I stability proven for linear heat equationI improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presentedI stability proven for linear heat equation
I improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presentedI stability proven for linear heat equationI improved stability of CDG in the linear case
I numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presentedI stability proven for linear heat equationI improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presentedI stability proven for linear heat equationI improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27

Motivation
Theoreticalresults
Numericalresults
Summary
Summary
I overview on DG method for convection-diffusion problemsI new parameter free method (CDG2) presentedI stability proven for linear heat equationI improved stability of CDG in the linear caseI numerical results show the performance of the method
B., Dedner, Klofkorn.Compact and stable Discontinuous Galerkin methods for convection-diffusionproblems, Preprint 2010, Math. Institute, Uni Freiburg
Thank you for your attention!
Brdar, Dedner, Klofkorn Compact and Stable DG methods MetStrom 27 / 27


















