Combinatorial algorithms for some multiflow...
35
Combinatorial algorithms for some multiflow problems and related network designs Hiroshi Hirai The University of Tokyo Connectivity Workshop HIM, Bonn, September 7-11, 2015 1
Transcript of Combinatorial algorithms for some multiflow...

Combinatorial algorithms for some multiflow problems
and related network designs
Hiroshi Hirai The University of Tokyo
Connectivity Workshop HIM, Bonn, September 7-11, 2015
1

Our result First combinatorial polytime algo for I First combinatorial strongly-polytime algo for II
Feature Build on Discrete Convex Analysis beyond
Application Approx. of terminal backup & node-multiflow cut
I. Mincost node-demand multiflow problem II. Maximum node-capacitated multiflow problem
We address
Zn
2

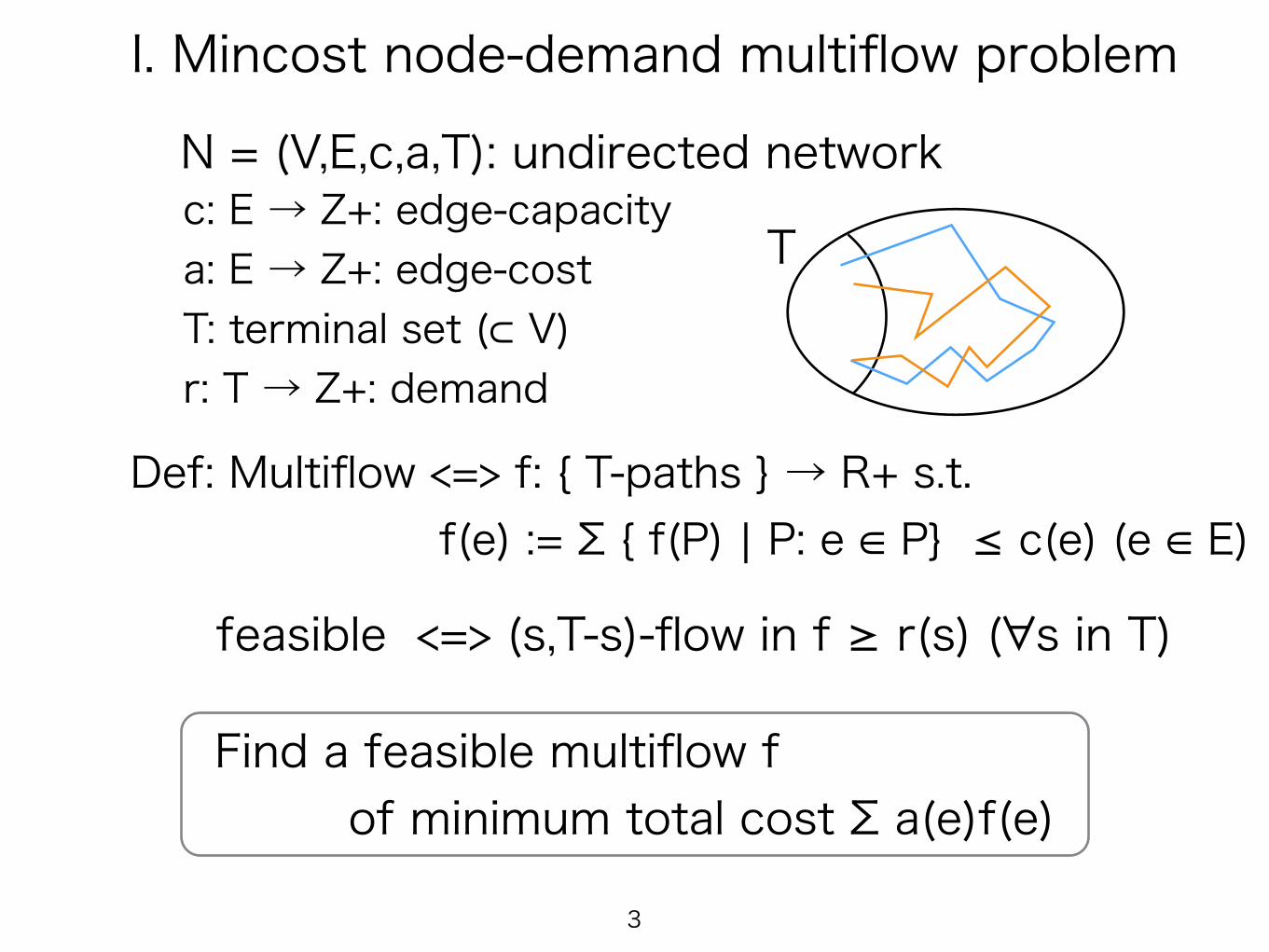
I. Mincost node-demand multiflow problem
N = (V,E,c,a,T): undirected networkc: E → Z+: edge-capacity a: E → Z+: edge-cost T: terminal set (⊂ V) r: T → Z+: demand
Def: Multiflow <=> f: { T-paths } → R+ s.t. f(e) := ∑ { f(P) | P: e ∈ P} ≤ c(e) (e ∈ E)
T
3
feasible <=> (s,T-s)-flow in f ≥ r(s) (∀s in T)
I. Mincost node-demand multiflow problem
N = (V,E,c,a,T): undirected networkc: E → Z+: edge-capacity a: E → Z+: edge-cost T: terminal set (⊂ V) r: T → Z+: demand
Def: Multiflow <=> f: { T-paths } → R+ s.t. f(e) := ∑ { f(P) | P: e ∈ P} ≤ c(e) (e ∈ E)
T
3
feasible <=> (s,T-s)-flow in f ≥ r(s) (∀s in T)
Find a feasible multiflow f of minimum total cost ∑ a(e)f(e)
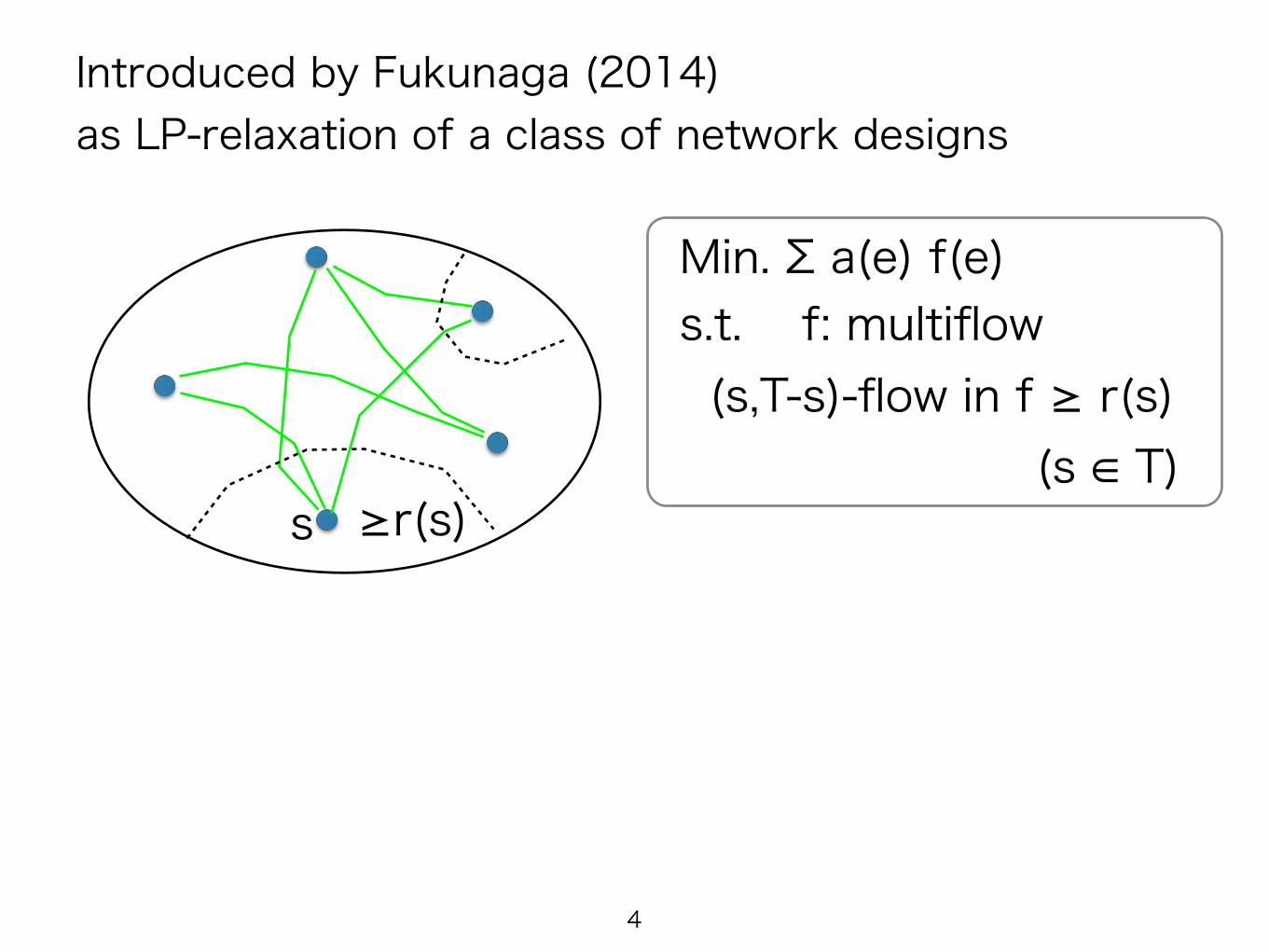
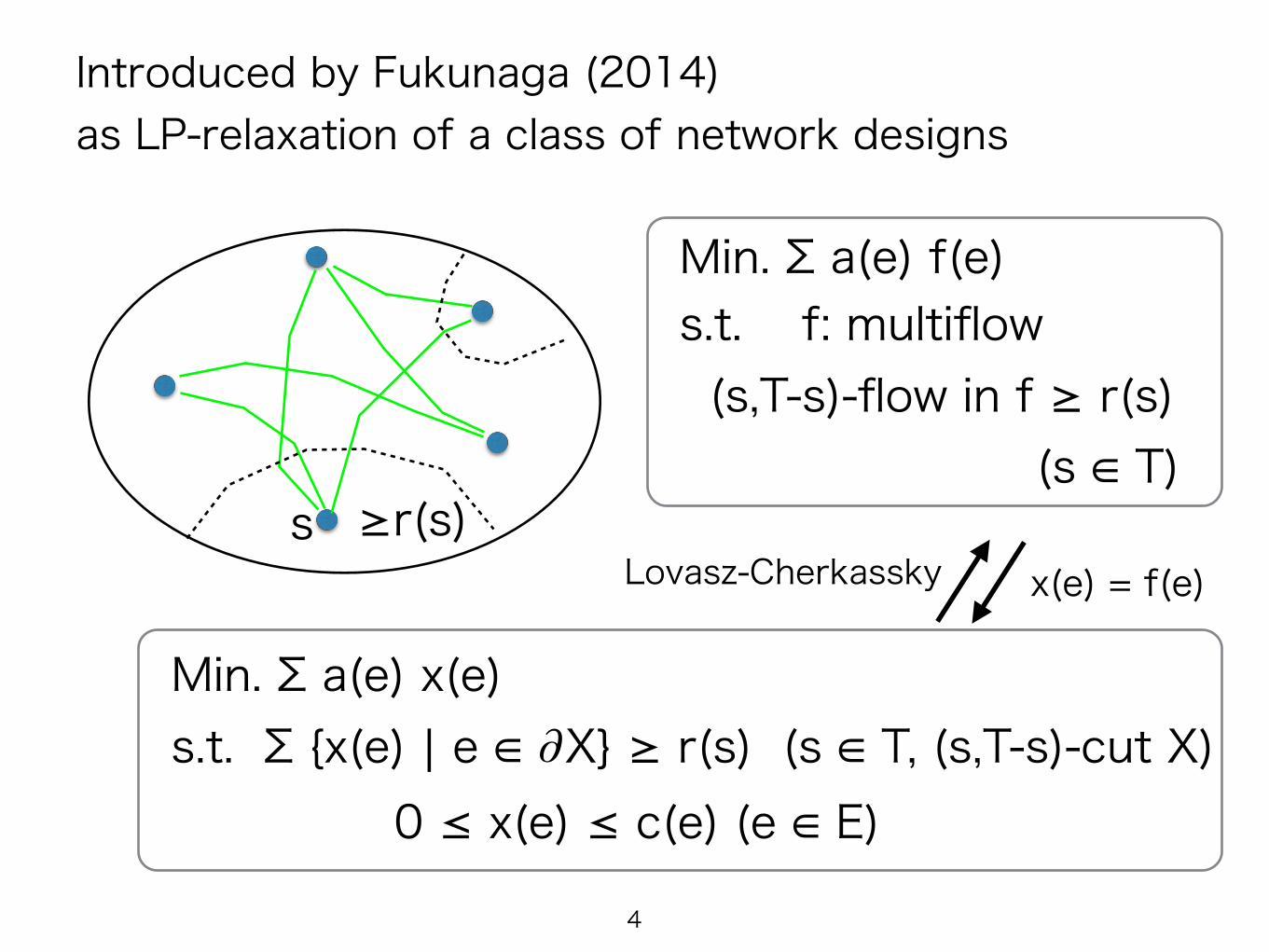
Introduced by Fukunaga (2014) as LP-relaxation of a class of network designs
s ≥r(s)
Min. ∑ a(e) f(e) s.t. f: multiflow (s,T-s)-flow in f ≥ r(s) (s ∈ T)
4
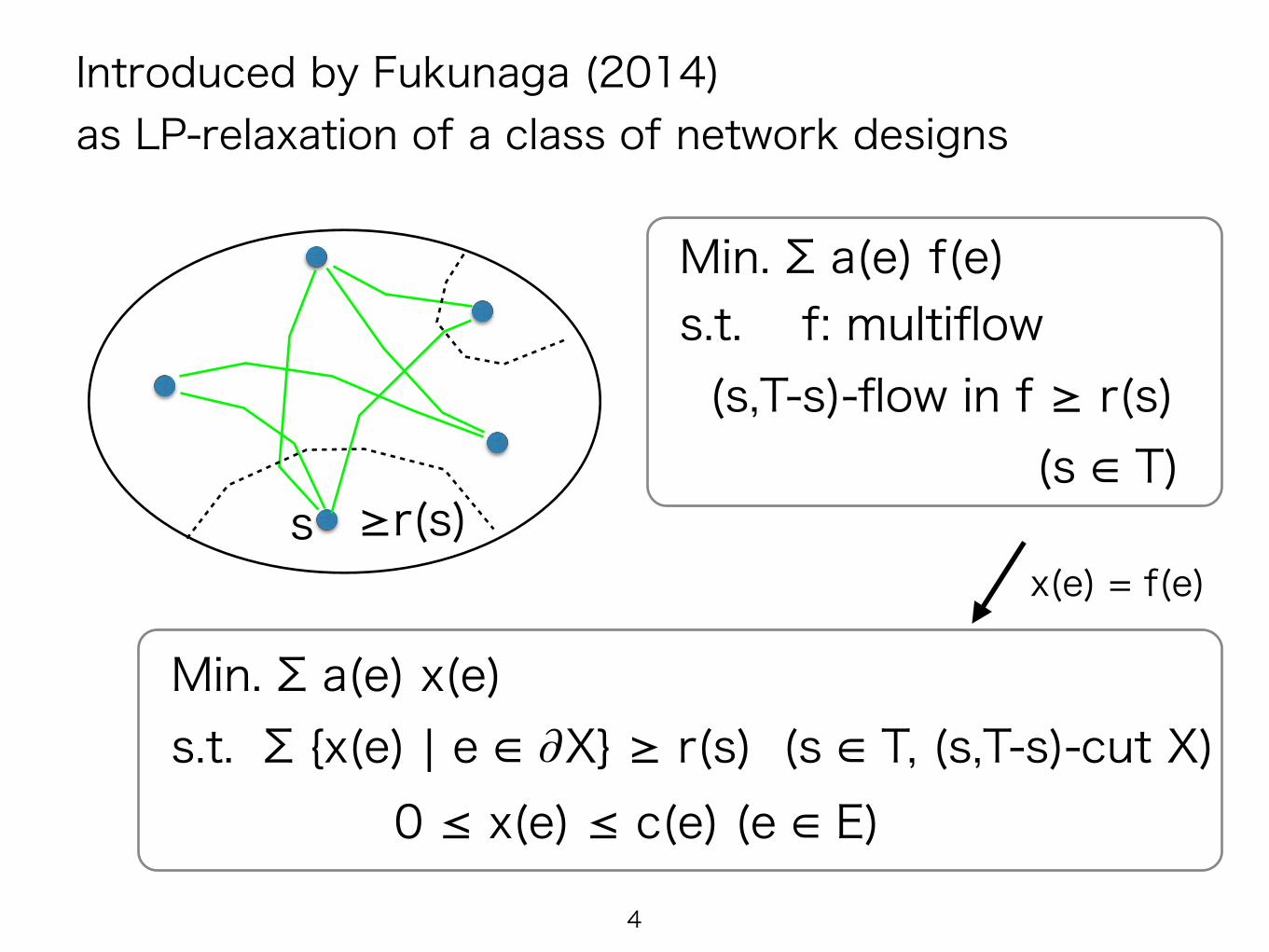
Introduced by Fukunaga (2014) as LP-relaxation of a class of network designs
Min. ∑ a(e) x(e) s.t. ∑ {x(e) | e ∈ ∂X} ≥ r(s) (s ∈ T, (s,T-s)-cut X) 0 ≤ x(e) ≤ c(e) (e ∈ E)
x(e) = f(e)s ≥r(s)
Min. ∑ a(e) f(e) s.t. f: multiflow (s,T-s)-flow in f ≥ r(s) (s ∈ T)
4
Introduced by Fukunaga (2014) as LP-relaxation of a class of network designs
Min. ∑ a(e) x(e) s.t. ∑ {x(e) | e ∈ ∂X} ≥ r(s) (s ∈ T, (s,T-s)-cut X) 0 ≤ x(e) ≤ c(e) (e ∈ E)
x(e) = f(e)Lovasz-Cherkasskys ≥r(s)
Min. ∑ a(e) f(e) s.t. f: multiflow (s,T-s)-flow in f ≥ r(s) (s ∈ T)
4
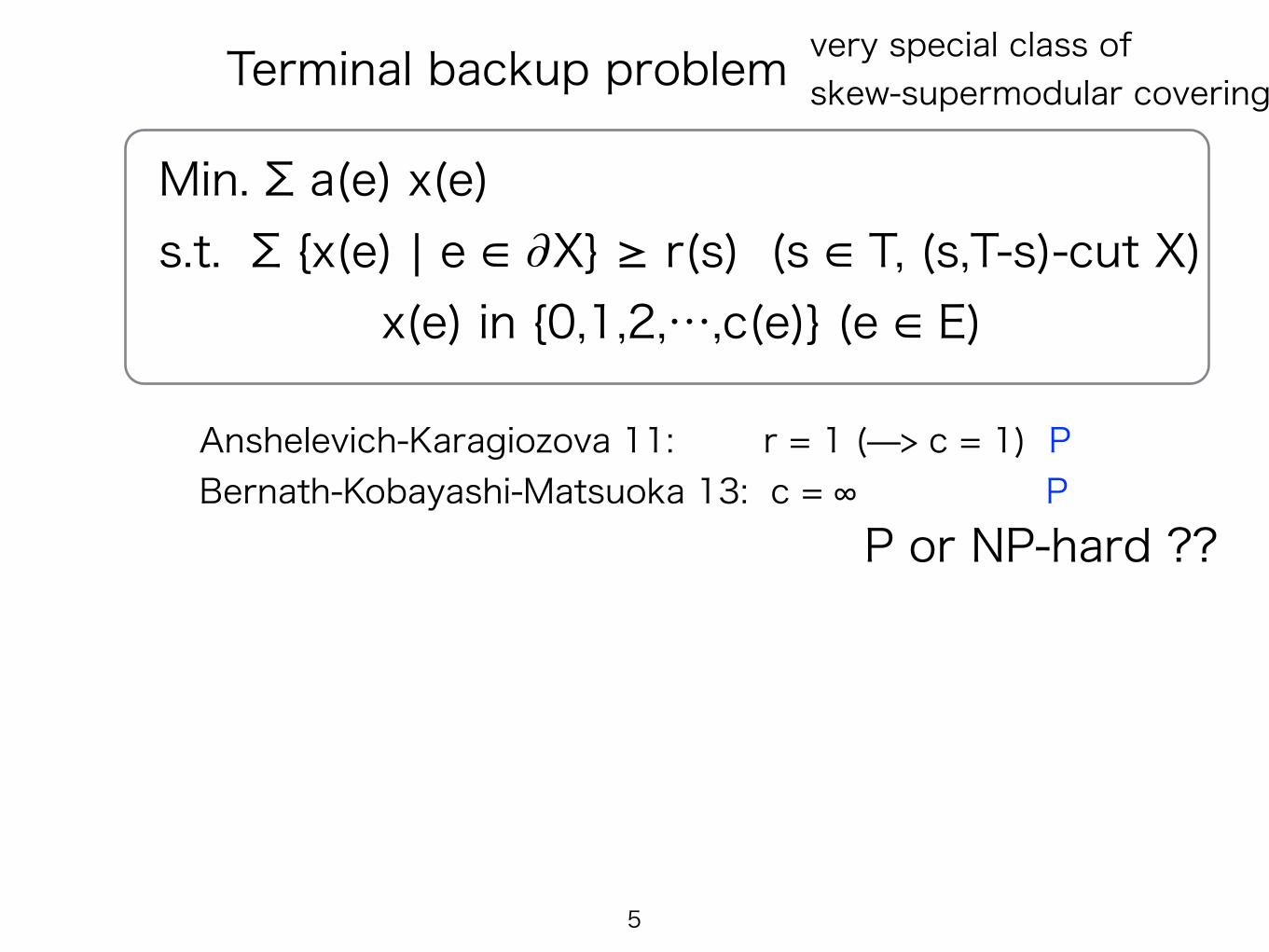
Min. ∑ a(e) x(e) s.t. ∑ {x(e) | e ∈ ∂X} ≥ r(s) (s ∈ T, (s,T-s)-cut X) x(e) in {0,1,2,…,c(e)} (e ∈ E)
Terminal backup problem
Anshelevich-Karagiozova 11: r = 1 (> c = 1) P Bernath-Kobayashi-Matsuoka 13: c = ∞ P
P or NP-hard ??
very special class of skew-supermodular covering
5

Min. ∑ a(e) x(e) s.t. ∑ {x(e) | e ∈ ∂X} ≥ r(s) (s ∈ T, (s,T-s)-cut X) x(e) in {0,1,2,…,c(e)} (e ∈ E)
Terminal backup problem
Anshelevich-Karagiozova 11: r = 1 (> c = 1) P Bernath-Kobayashi-Matsuoka 13: c = ∞ P
naive
Fukunaga 14: half-integrality of LP-relax. (= Multiflow-relax.) half-integral opt. > 2-approx. > 4/3-approx.obtained by
ellipsoid method
P or NP-hard ??
very special class of skew-supermodular covering
5
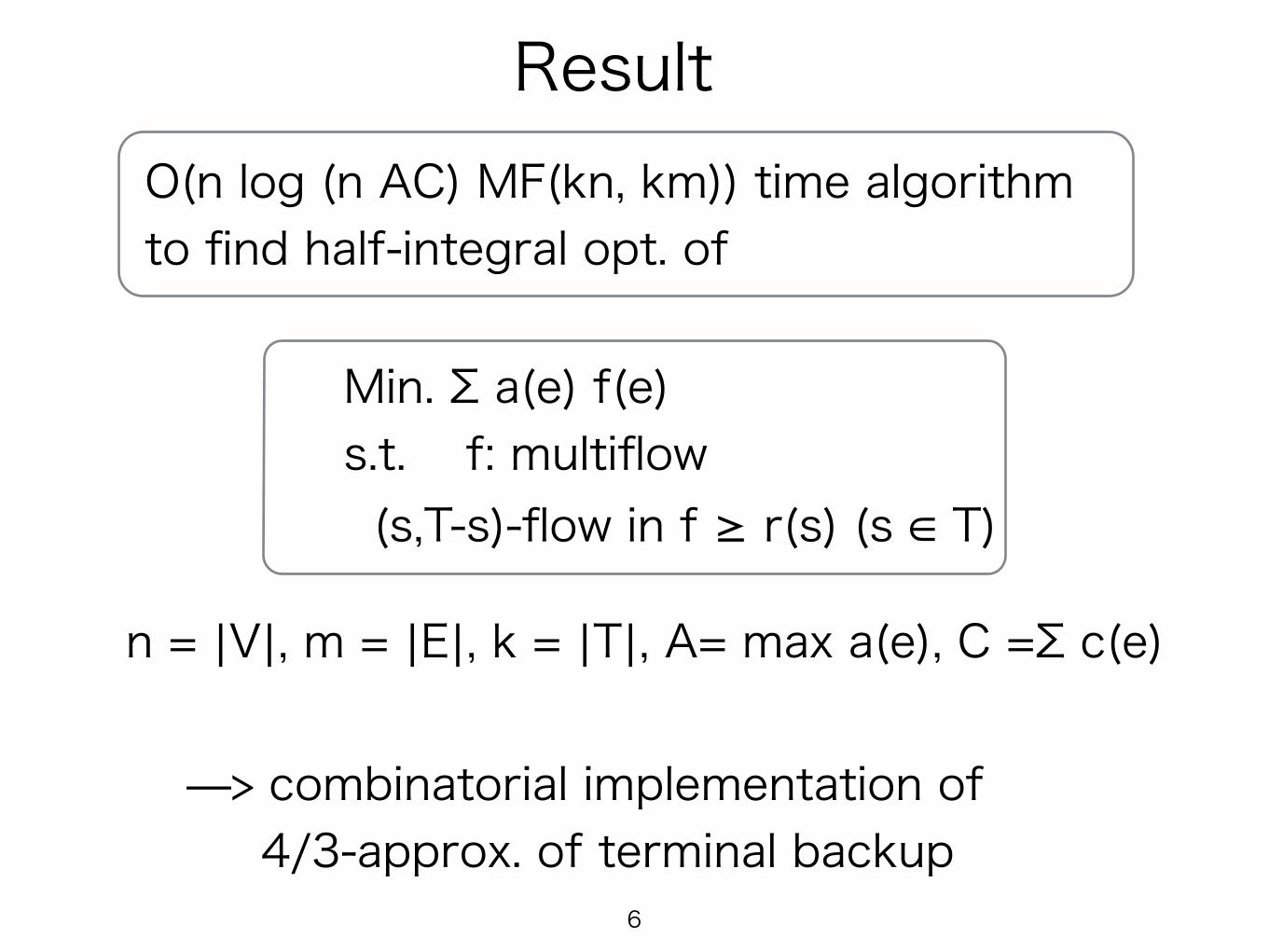
n = |V|, m = |E|, k = |T|, A= max a(e), C =∑ c(e)
O(n log (n AC) MF(kn, km)) time algorithm to find half-integral opt. of
Min. ∑ a(e) f(e) s.t. f: multiflow (s,T-s)-flow in f ≥ r(s) (s ∈ T)
> combinatorial implementation of 4/3-approx. of terminal backup
Result
6

Our multiflow problem generalizes mincost maximum free multiflow problem (Karzanov 79)
Goldberg, Karzanov 97: combinatorial weakly polynomial time algorithms … O(??)
Karzanov 94: strongly polynomial time algorithm … ellipsoid
Open problem: combinatorial strongly polynomial time algorithm ?
Remark
7
Idea Discrete Convex Analysis (Murota) ~ theory of “convex” optimization over Zn
8
Idea Discrete Convex Analysis (Murota) ~ theory of “convex” optimization over
Adapting DCA algorithm & technique (steepest descent algo. & proximity scaling)
Zn
8
Dual of our multiflow problem ~ “convex” optimization over
n
123
0≃
n
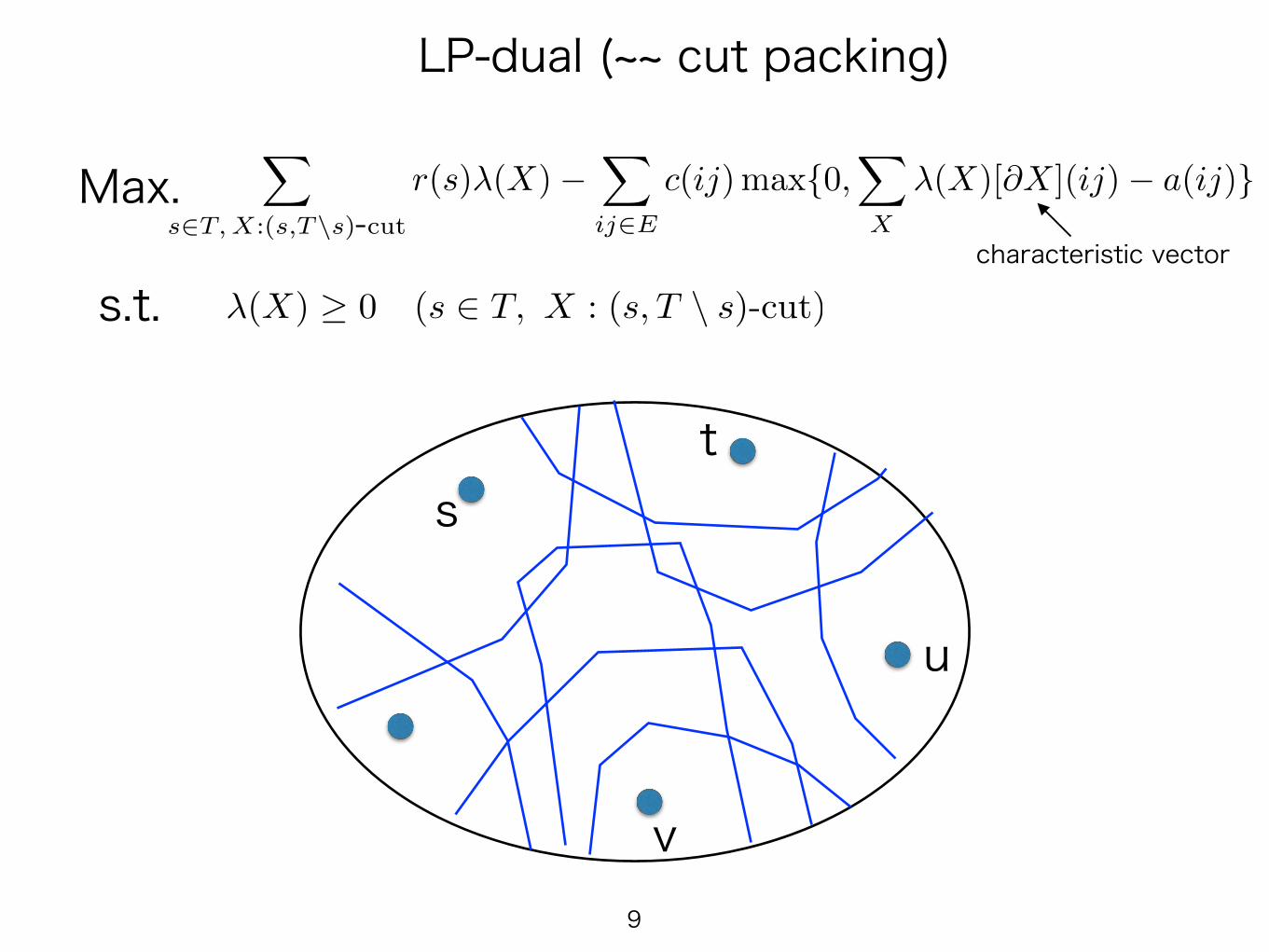
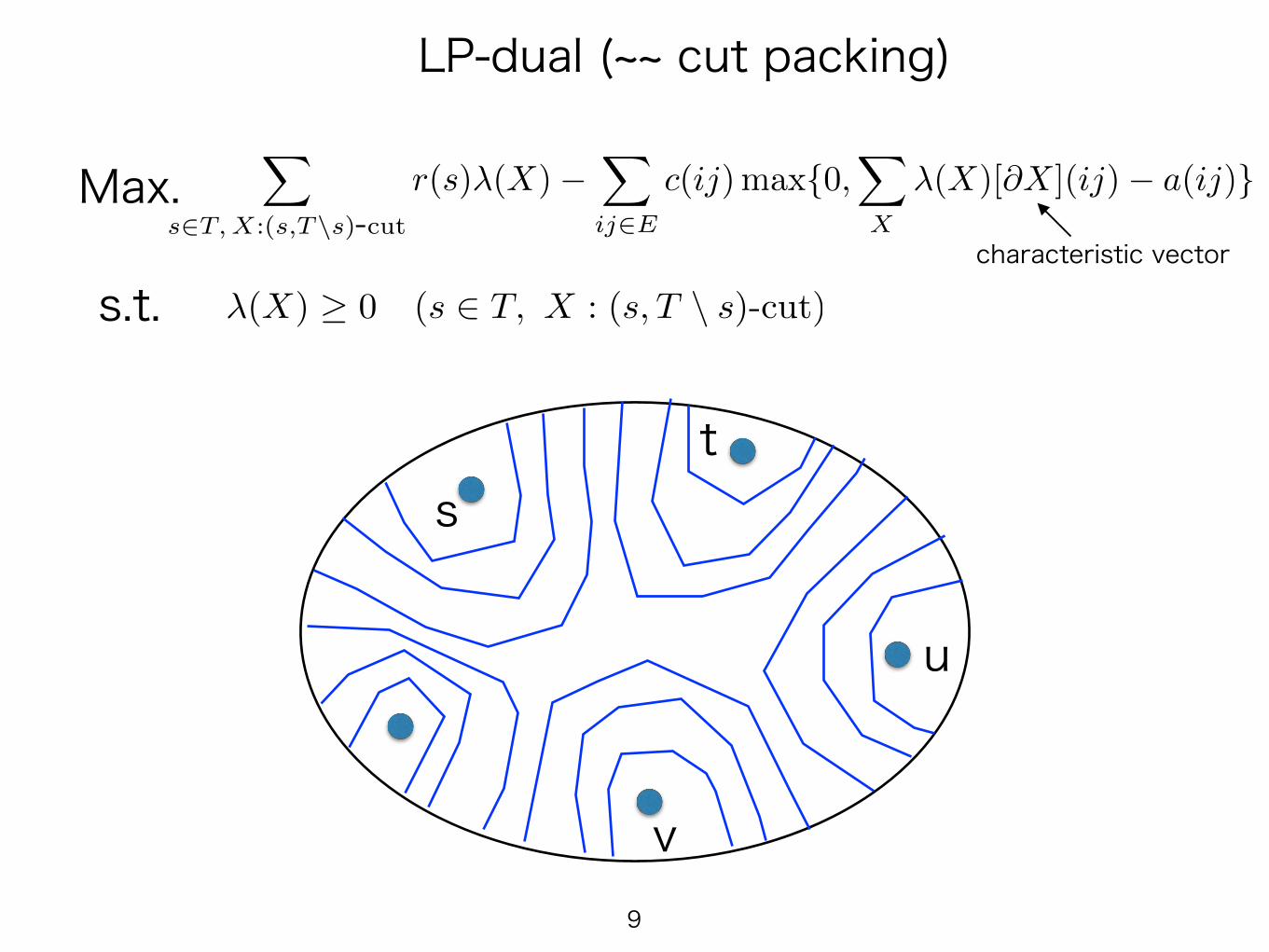
LP-dual (~~ cut packing)
9
characteristic vector
�(X) � 0 (s � T, X : (s, T \ s)-cut)
�
s�T, X:(s,T\s)-cut
r(s)�(X) ��
ij�E
c(ij) max{0,�
X
�(X)[�X](ij) � a(ij)}Max.
s.t.
st
u
v
LP-dual (~~ cut packing)
9
characteristic vector
�(X) � 0 (s � T, X : (s, T \ s)-cut)
�
s�T, X:(s,T\s)-cut
r(s)�(X) ��
ij�E
c(ij) max{0,�
X
�(X)[�X](ij) � a(ij)}Max.
s.t.
st
u
v

LP-dual (~~ cut packing)
9
characteristic vector
�(X) � 0 (s � T, X : (s, T \ s)-cut)
�
s�T, X:(s,T\s)-cut
r(s)�(X) ��
ij�E
c(ij) max{0,�
X
�(X)[�X](ij) � a(ij)}Max.
s.t.
st
u
v

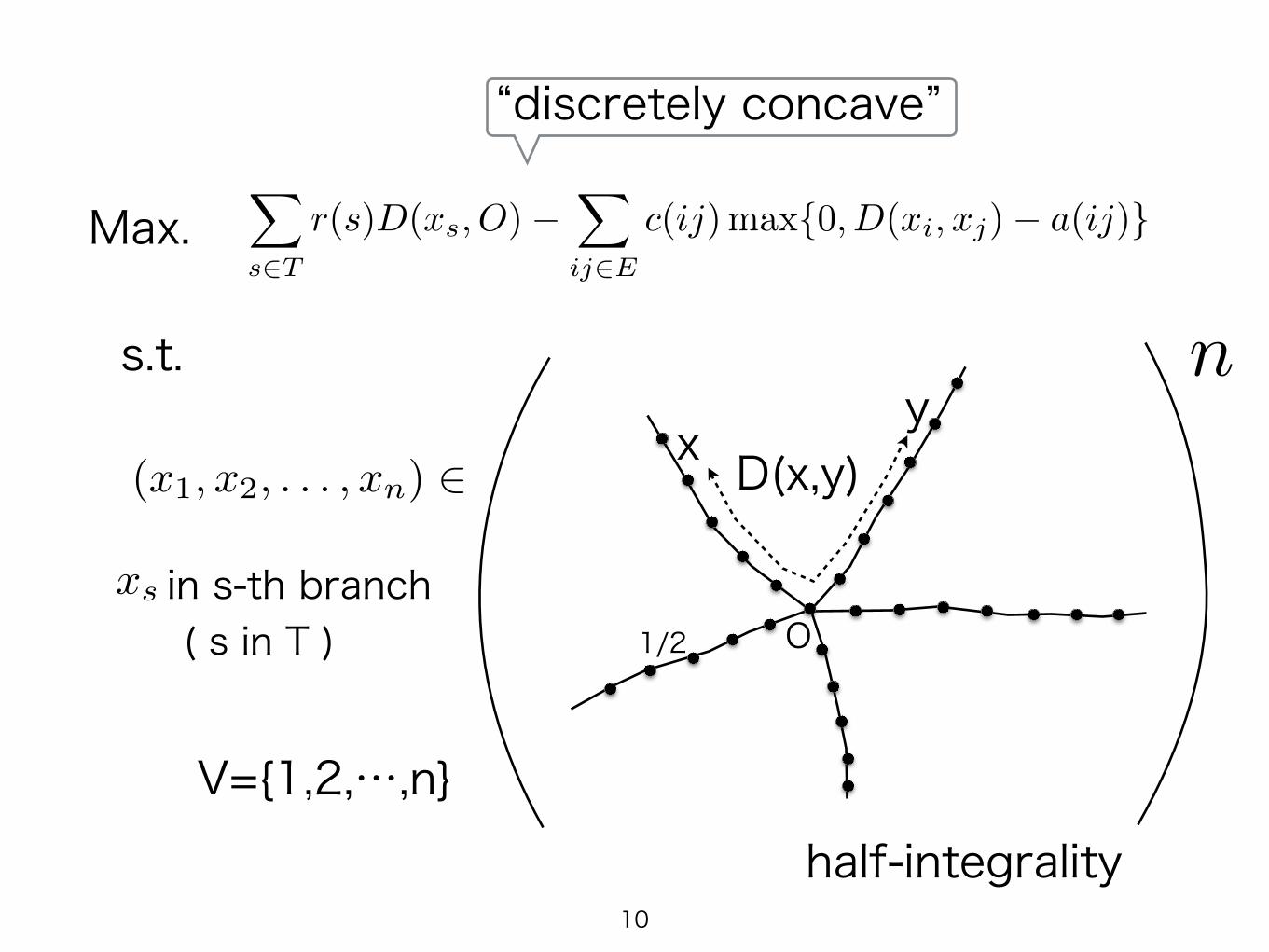
�
s�T
r(s)D(xs, O) ��
ij�E
c(ij) max{0, D(xi, xj) � a(ij)}Max.
s.t.
(x1, x2, . . . , xn) �
n
O
xy
D(x,y)
in s-th branchxs
( s in T )
10
V={1,2,…,n}

�
s�T
r(s)D(xs, O) ��
ij�E
c(ij) max{0, D(xi, xj) � a(ij)}Max.
s.t.
(x1, x2, . . . , xn) �
n
O
xy
D(x,y)
in s-th branchxs
( s in T )
half-integrality10
1/2
V={1,2,…,n}
�
s�T
r(s)D(xs, O) ��
ij�E
c(ij) max{0, D(xi, xj) � a(ij)}Max.
s.t.
(x1, x2, . . . , xn) �
n
O
xy
D(x,y)
in s-th branchxs
( s in T )
half-integrality
“discretely concave”
10
1/2
V={1,2,…,n}
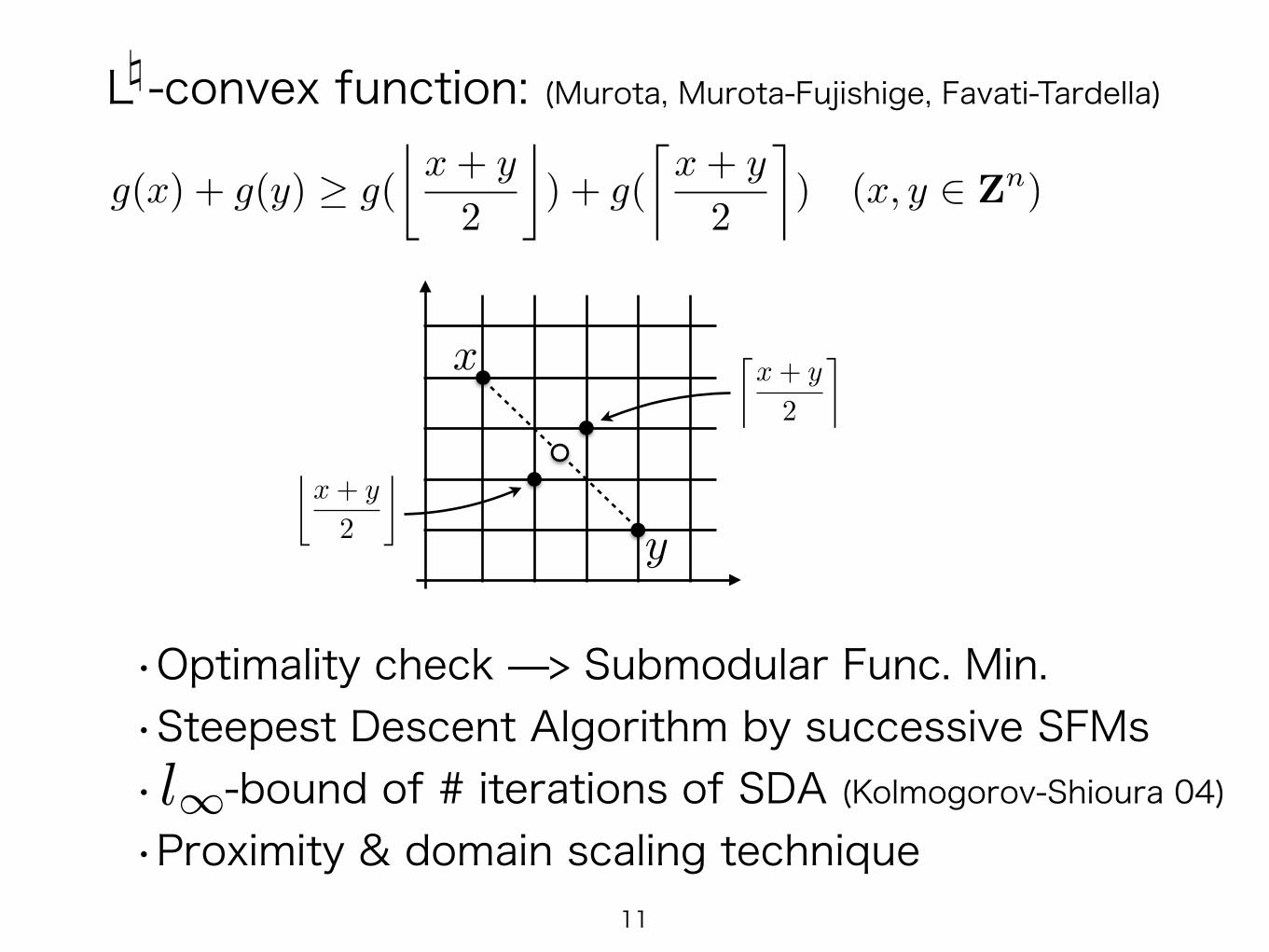
�L -convex function: (Murota, Murota-Fujishige, Favati-Tardella)
•Optimality check > Submodular Func. Min. •Steepest Descent Algorithm by successive SFMs • -bound of # iterations of SDA (Kolmogorov-Shioura 04) •Proximity & domain scaling techniquel�
11
g(x) + g(y) � g(
�x + y
2
�) + g(
�x + y
2
�) (x, y � Zn)
x
y
�x + y
2
�
�x + y
2
�

�L -convex function: (Murota, Murota-Fujishige, Favati-Tardella)
•Optimality check > Submodular Func. Min. •Steepest Descent Algorithm by successive SFMs • -bound of # iterations of SDA (Kolmogorov-Shioura 04) •Proximity & domain scaling techniquel�
11
g(x) + g(y) � g(
�x + y
2
�) + g(
�x + y
2
�) (x, y � Zn)
x
y
�x + y
2
�
�x + y
2
�

(negative of) our dual objective satisfies
•Optimality check > k-Submodular Func. Min. •Steepest Descent Algorithm by successive k-SFMs • -bound of # iterations of SDA •Proximity & domain scaling techniquel�
12
g(x) + g(y) � g(
�x + y
2
�) + g(
�x + y
2
�) (x, y � Zn)==
n
(Huber, Kolmogorov 12)
x
y
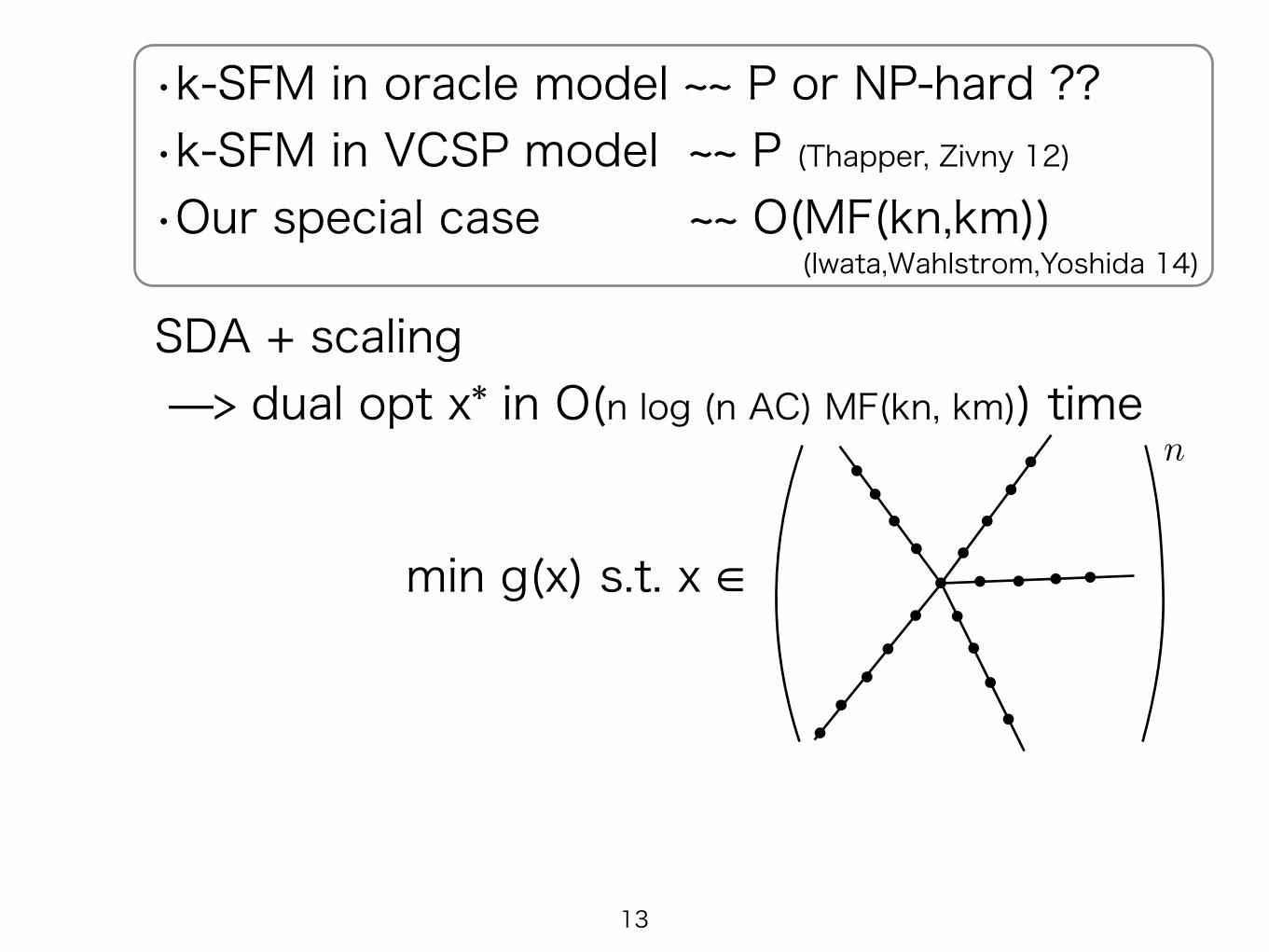
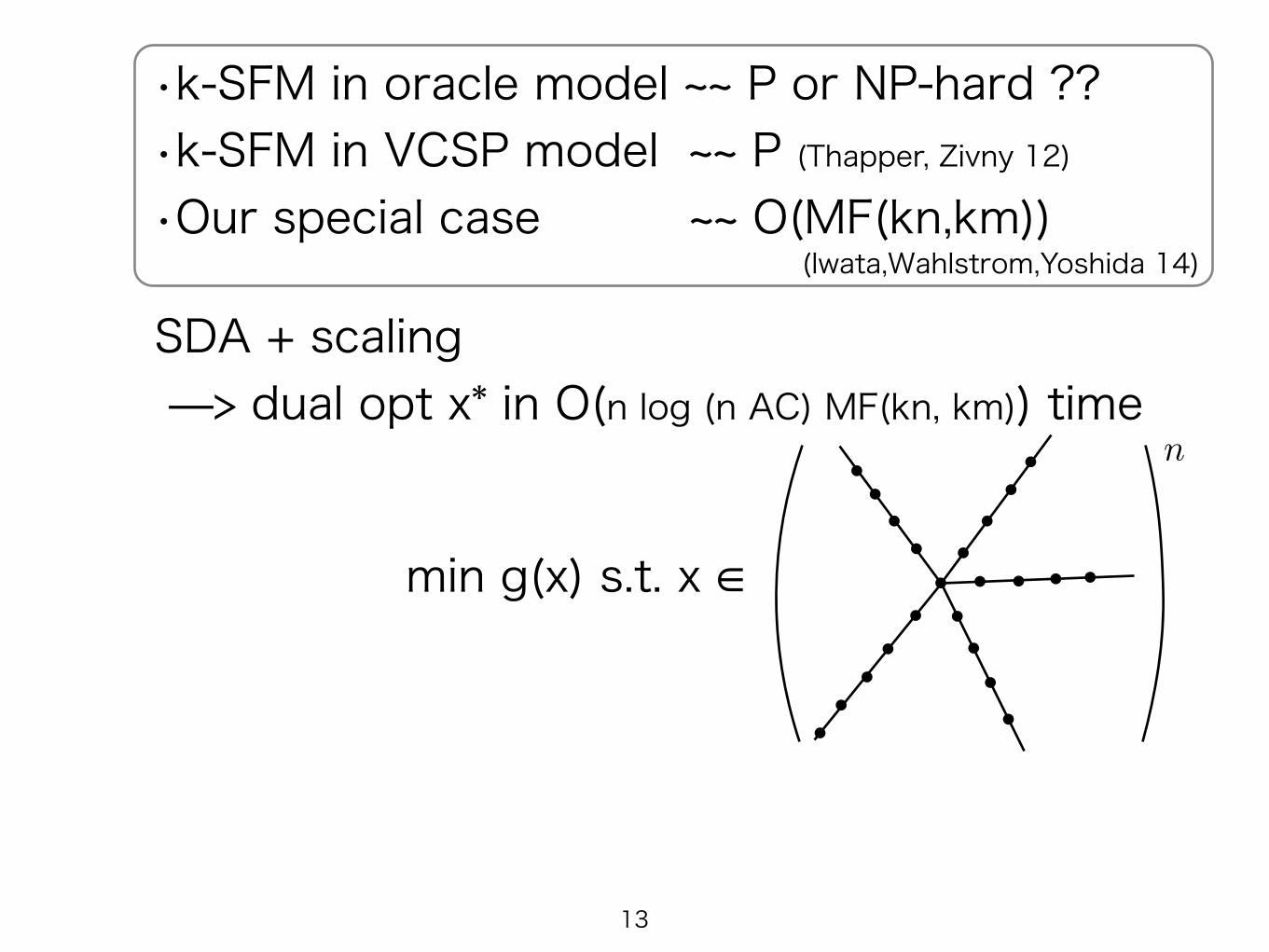
•k-SFM in oracle model ~~ P or NP-hard ?? •k-SFM in VCSP model ~~ P (Thapper, Zivny 12) •Our special case ~~ O(MF(kn,km))
SDA + scaling > dual opt x* in O(n log (n AC) MF(kn, km)) time
13
(Iwata,Wahlstrom,Yoshida 14)
n
min g(x) s.t. x ∈
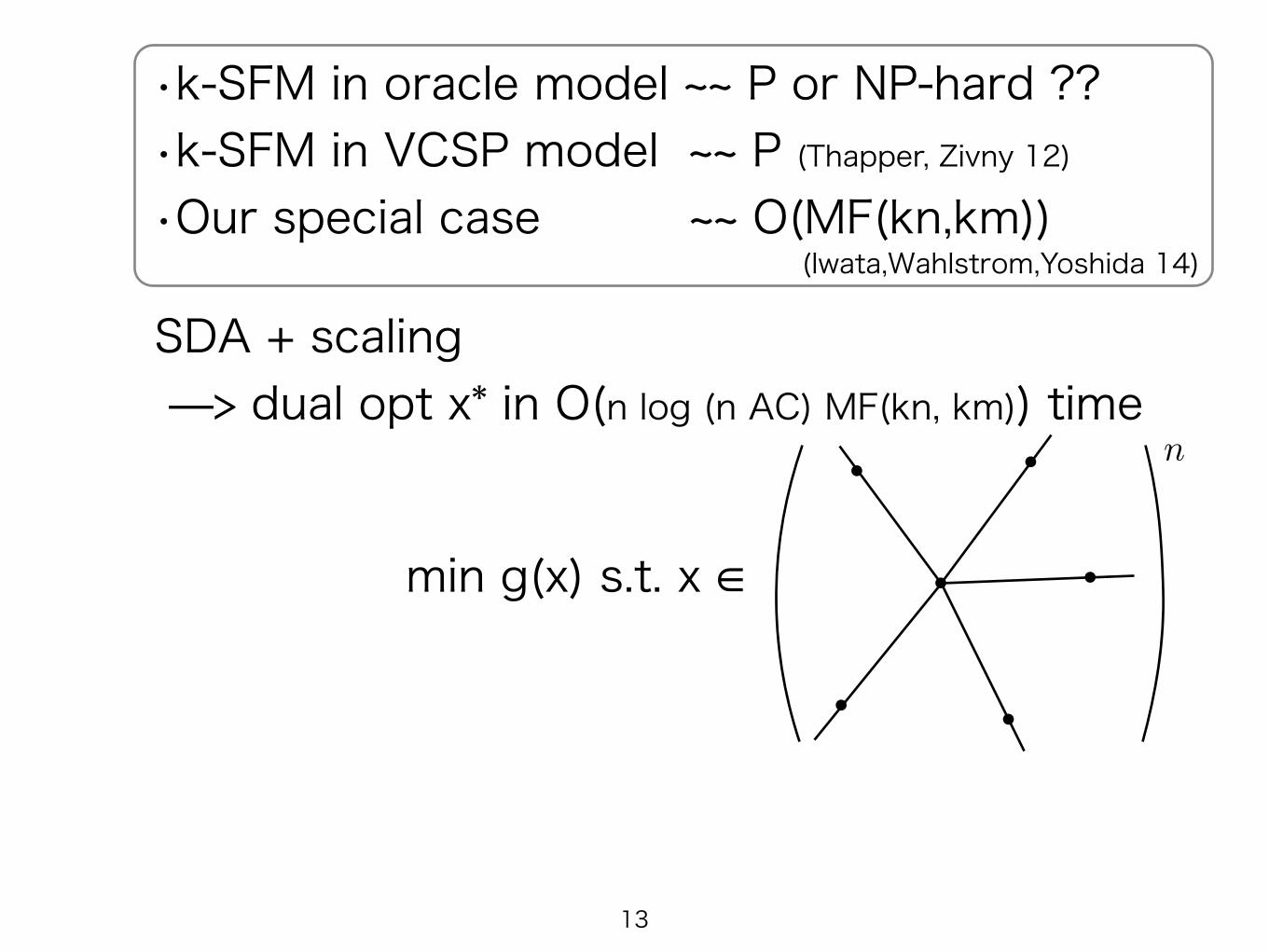
•k-SFM in oracle model ~~ P or NP-hard ?? •k-SFM in VCSP model ~~ P (Thapper, Zivny 12) •Our special case ~~ O(MF(kn,km))
SDA + scaling > dual opt x* in O(n log (n AC) MF(kn, km)) time
13
(Iwata,Wahlstrom,Yoshida 14)
n
min g(x) s.t. x ∈
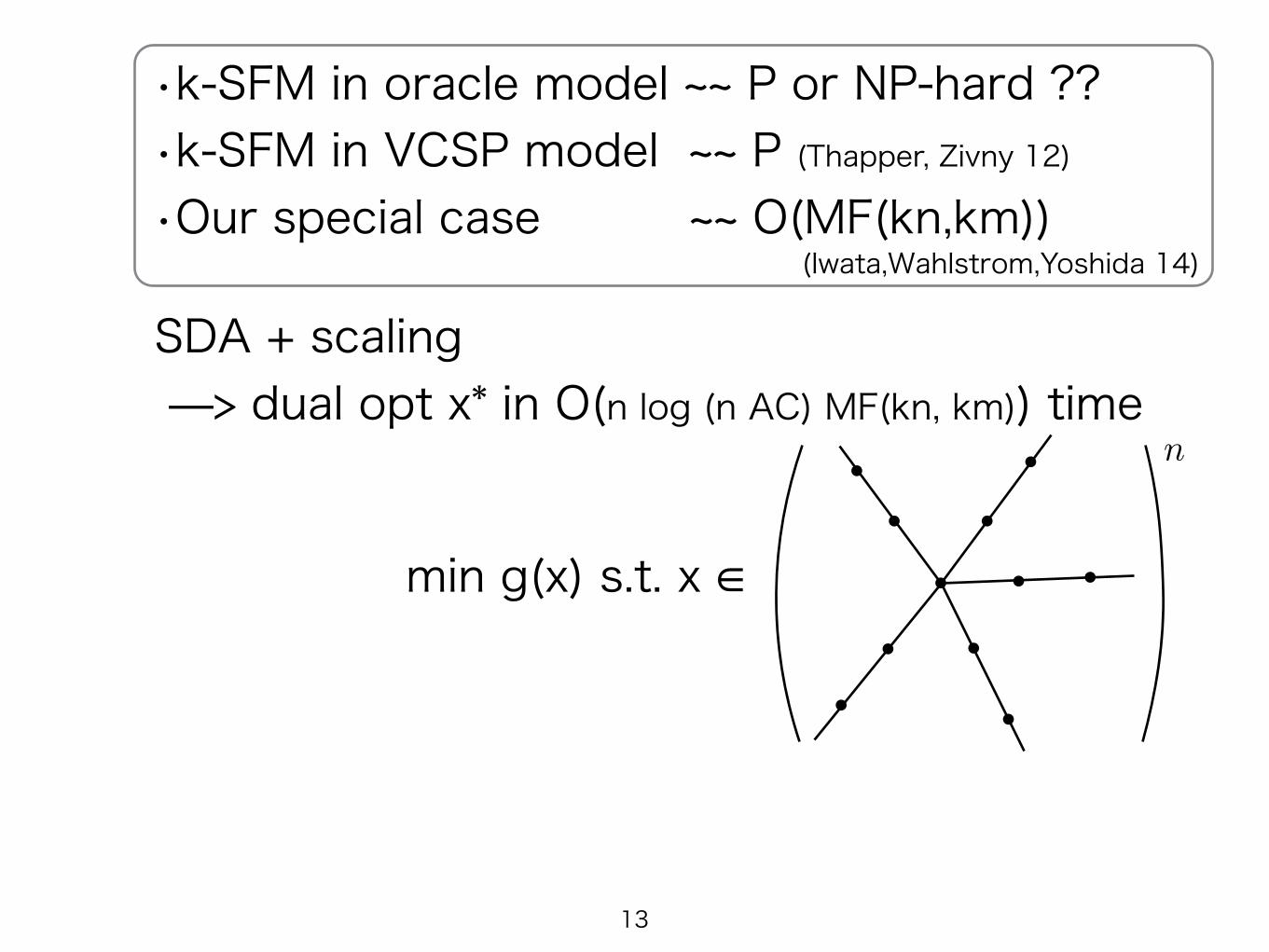
•k-SFM in oracle model ~~ P or NP-hard ?? •k-SFM in VCSP model ~~ P (Thapper, Zivny 12) •Our special case ~~ O(MF(kn,km))
SDA + scaling > dual opt x* in O(n log (n AC) MF(kn, km)) time
13
(Iwata,Wahlstrom,Yoshida 14)
n
min g(x) s.t. x ∈
•k-SFM in oracle model ~~ P or NP-hard ?? •k-SFM in VCSP model ~~ P (Thapper, Zivny 12) •Our special case ~~ O(MF(kn,km))
SDA + scaling > dual opt x* in O(n log (n AC) MF(kn, km)) time
13
(Iwata,Wahlstrom,Yoshida 14)
n
min g(x) s.t. x ∈
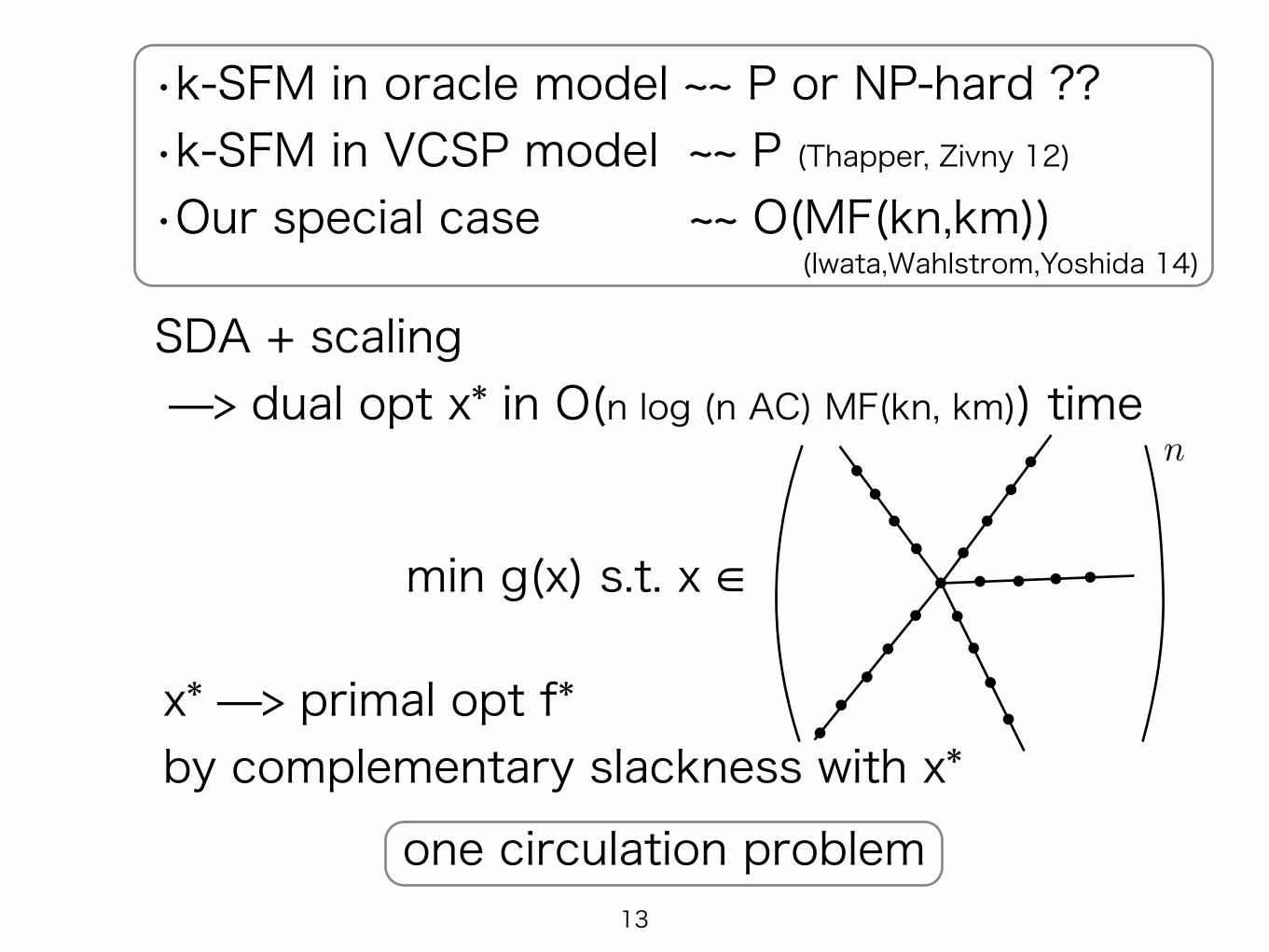
•k-SFM in oracle model ~~ P or NP-hard ?? •k-SFM in VCSP model ~~ P (Thapper, Zivny 12) •Our special case ~~ O(MF(kn,km))
SDA + scaling > dual opt x* in O(n log (n AC) MF(kn, km)) time
13
x* > primal opt f* by complementary slackness with x*
one circulation problem
(Iwata,Wahlstrom,Yoshida 14)
n
min g(x) s.t. x ∈

1.5
1.53
2
2
12
53
4
9
T
14
II. Maximum node-capacitated free multiflow problem
c:V \ T > Z+
N = (V,E,c,T)
Max. ∑ f(P) s.t. f: multiflow

•dual of LP-relaxation of node-multiway cut •dual half-integrality > 2-approximation
Garg, Vazirani, Yannakakis 04
Pap 07,08 •primal half-integrality •strong polynomial time solvability (ellipsoid)
Babenko, Karzanov 08 •combinatorial O(MF(n, m, C) n^2 (log n)^2 log C) time
15
Mader’s openly-disjoint T-path thm

ResultO(m (log k) MSF(n, m,1)) time algorithm to find half-integral primal & dual opt.
MSF(n,m,h): max. submodular flow on network of n nodes, m edges, time complexity h of computing exchange capacity
16

ResultO(m (log k) MSF(n, m,1)) time algorithm to find half-integral primal & dual opt.
MSF(n,m,h): max. submodular flow on network of n nodes, m edges, time complexity h of computing exchange capacity
Fujishige, Zhang 92: O(n^3 h) > O(m n^3 log k) > 2-approx. of node-multiway cut in O(m n^3 log k) time
c.f. Madan-Chekuri 15: (2+ε)-approx. in O(mn/ε^2) time ~
16
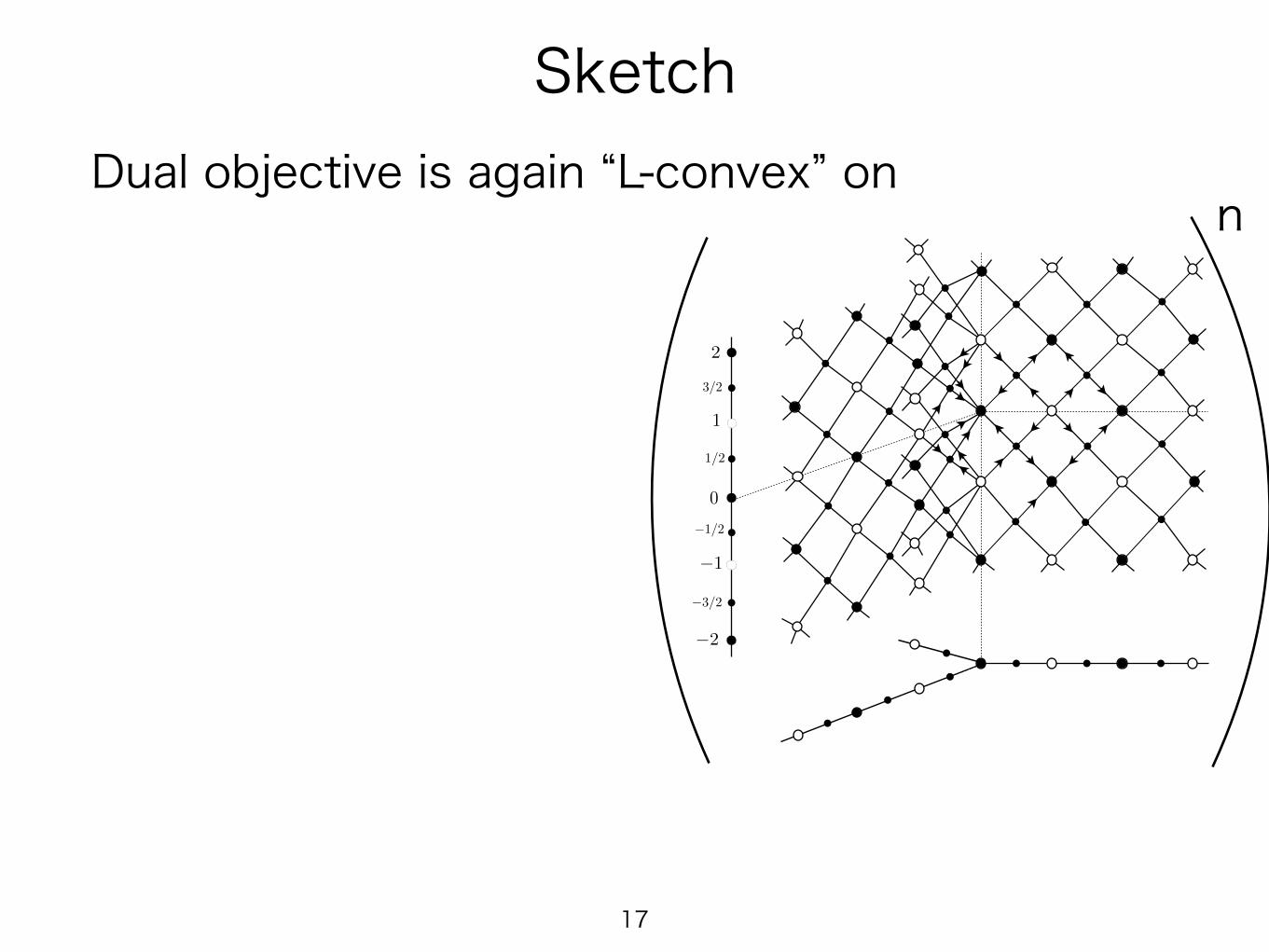
SketchDual objective is again “L-convex” on
0
1/2
1
3/2
2
�1/2
�1
�3/2
�2
n
17
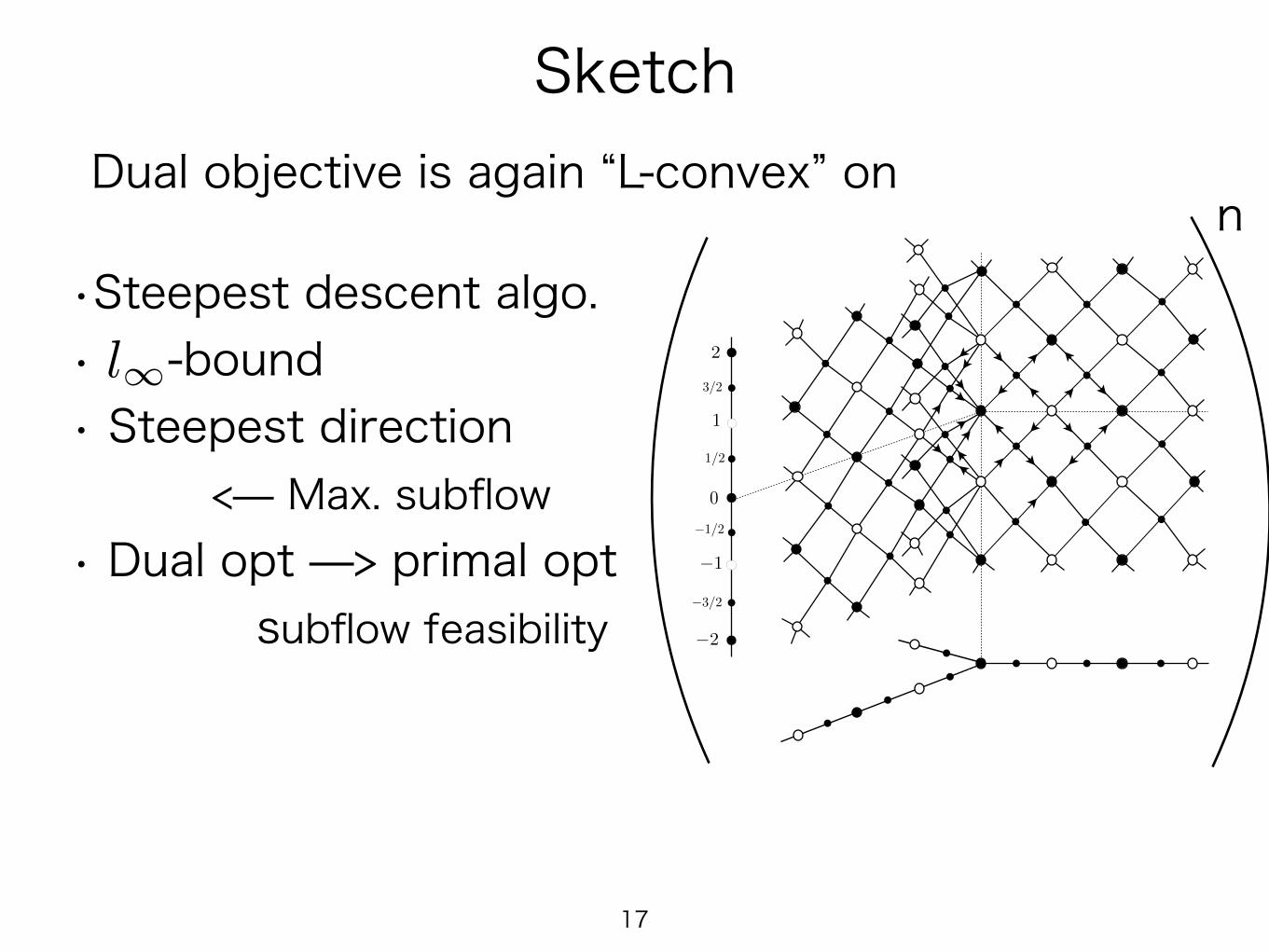
SketchDual objective is again “L-convex” on
0
1/2
1
3/2
2
�1/2
�1
�3/2
�2
n•Steepest descent algo. • -bound • Steepest direction < Max. subflow • Dual opt > primal opt subflow feasibility
l�
17

SketchDual objective is again “L-convex” on
0
1/2
1
3/2
2
�1/2
�1
�3/2
�2
n•Steepest descent algo. • -bound • Steepest direction < Max. subflow • Dual opt > primal opt subflow feasibility
l�
bisubflow>subflow
perturbation
17
• H. Hirai: L-extendable functions and a proximity scaling algorithm for minimum cost multiflow problem, Discrete Optimization, 18 (2015), 1-37.
• H. Hirai: A dual descent algorithm for node-capacitated multiflow problems and its applications, 2015, arXiv:1508.07065.
Thank you for your attention !
http://www.misojiro.t.u-tokyo.ac.jp/~hirai/
18