Cognitive Colonization The Robotics Institute Carnegie Mellon University Bernardine Dias, Bruce...
28
T h e R o b o tic s In stitute Cognitive Colonization The Robotics Institute Carnegie Mellon University Bernardine Dias, Bruce Digney, Martial Hebert, Bart Nabbe, Tony Stentz, Scott Thayer
-
date post
19-Dec-2015 -
Category
Documents
-
view
215 -
download
0
Transcript of Cognitive Colonization The Robotics Institute Carnegie Mellon University Bernardine Dias, Bruce...
The Robotics Institute
Cognitive Colonization
The Robotics InstituteCarnegie Mellon University
Bernardine Dias, Bruce Digney, Martial Hebert, Bart Nabbe, Tony Stentz, Scott Thayer
The Robotics Institute
Presentation Outline
Requirements Software Architecture Perception and Mapping Communal Learning Robot Test Bed Status and Future Work
The Robotics Institute
Requirements
is robust to individual robot failure; does not depend on reliable
communications; can perform global tasks given the limited
sensing and computational capabilities of individual robots;
learn to perform better through experience.
Distributed robotics for small-scale mobile robotscalls for a software system that:
The Robotics Institute
Cognitive Colonization Paradigm
dynamically assigning robots to tasks and checkpointing data;
treating communication as an opportunistic resource;
aggregating resources by distributing the computational and perceptual load across the group of robots;
sharing learned behaviors (both individual and group) between all robots.
The proposed software system addresses these requirements by:
The Robotics Institute
Software Architecture Models
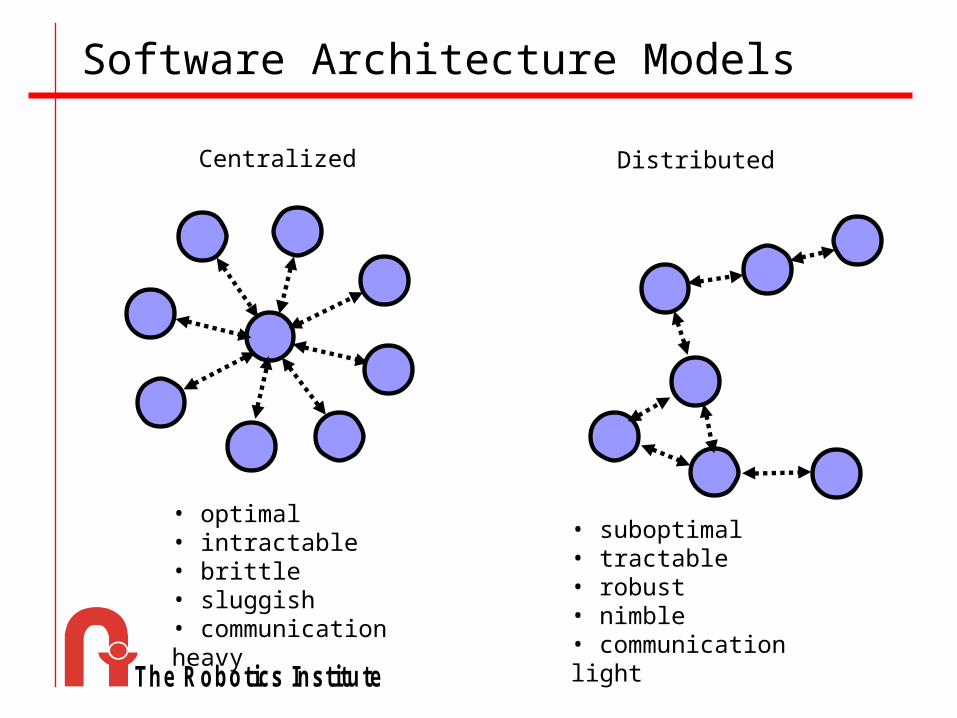
Centralized Distributed
• optimal• intractable• brittle• sluggish• communication heavy
• suboptimal• tractable• robust• nimble• communication light
The Robotics Institute
Free Market Architecture
Robots in a team are organized as an economy
Team mission is best achieved when the economy maximizes production and minimizes costs
Robots interact with each other to exchange money for tasks to maximize profit
Robots are both self-interested and benevolent, since it is in their self interest to do global good

The Robotics Institute
Simple Reasoning
Robot 1
Robot 2
Task A = 120 Task B = 180
50
75
110
100
Robot 1 profit = 20Robot 2 profit = 30
The Robotics Institute
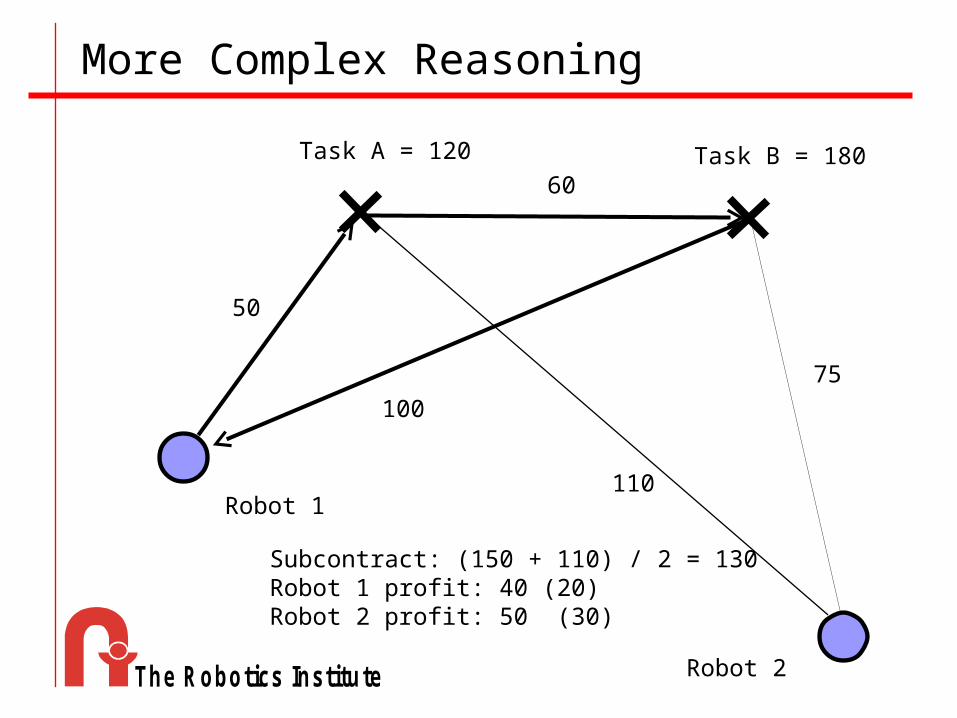
More Complex Reasoning
Robot 1
Robot 2
Task A = 120 Task B = 180
50
75
110
100
60
Subcontract: (150 + 110) / 2 = 130Robot 1 profit: 40 (20)Robot 2 profit: 50 (30)
The Robotics Institute
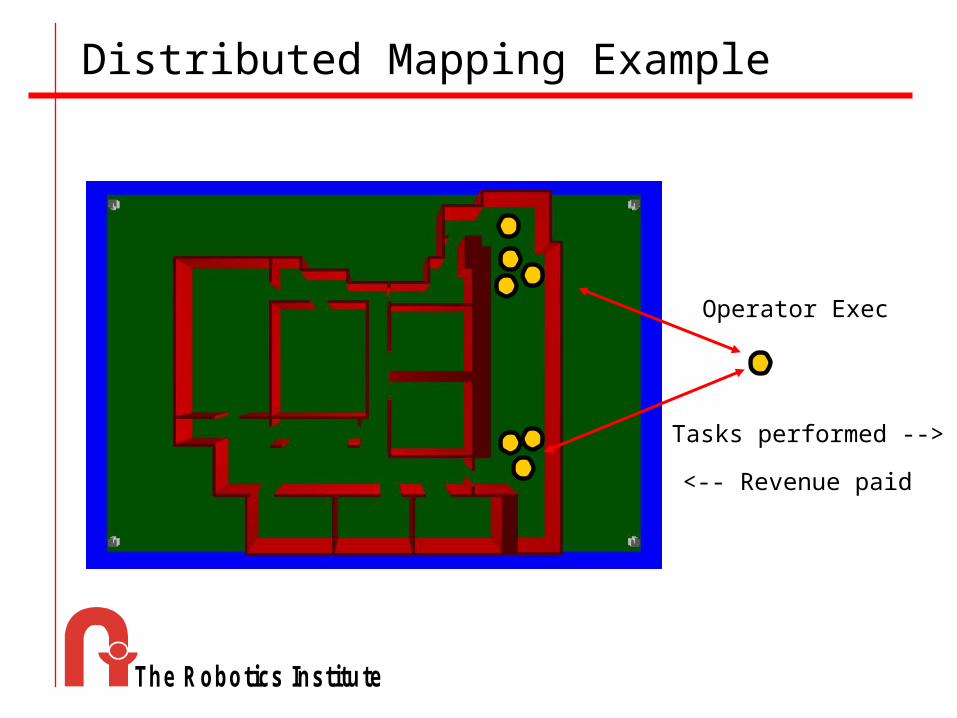
Distributed Mapping Example
Operator Exec
<-- Revenue paid
Tasks performed -->
The Robotics Institute
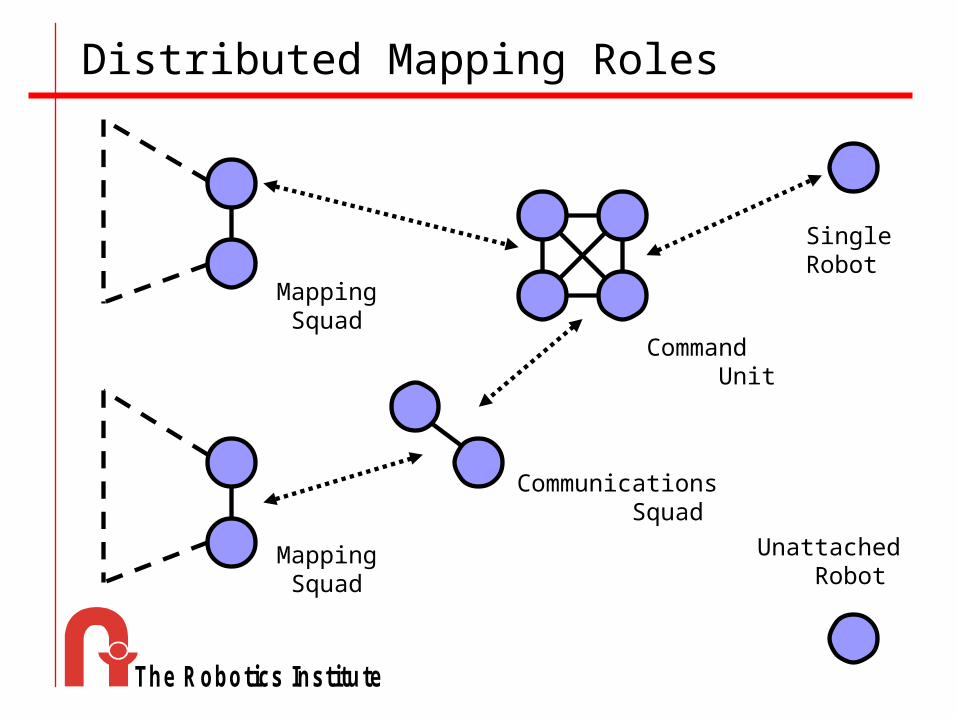
Distributed Mapping Roles
Unattached Robot
SingleRobot
Command Unit
Mapping Squad
Mapping Squad
Communications Squad

The Robotics Institute
Architectural Framework
Roles
Resources
Negotiations
Locomotor Sensors CPU
Mapper Comm Leader
Exec
Radio
The Robotics Institute
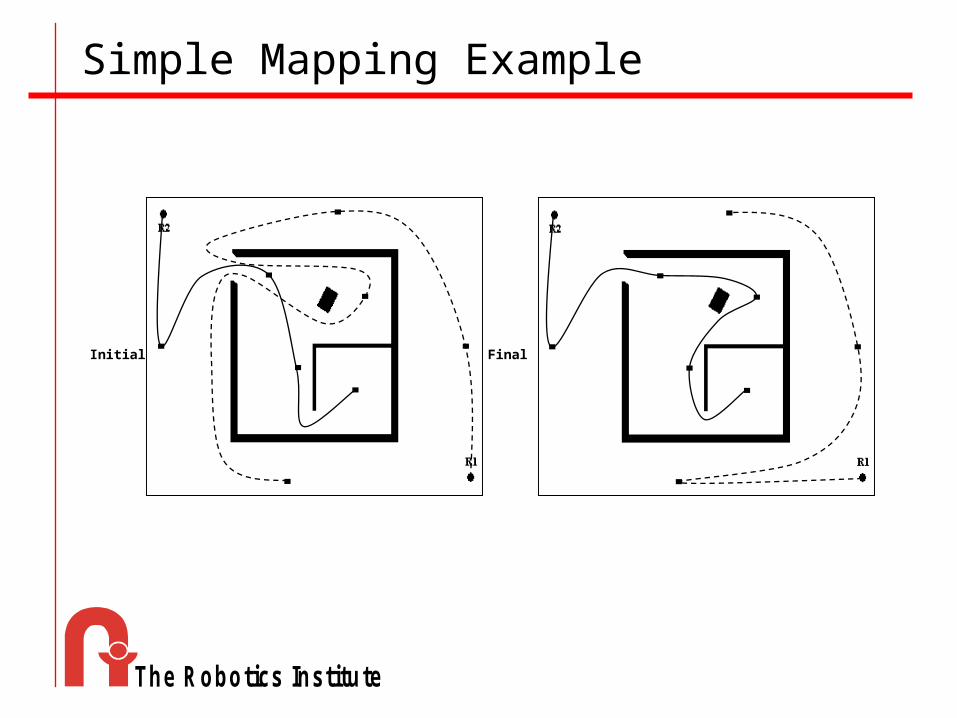
Simple Mapping Example
Initial Final
The Robotics Institute
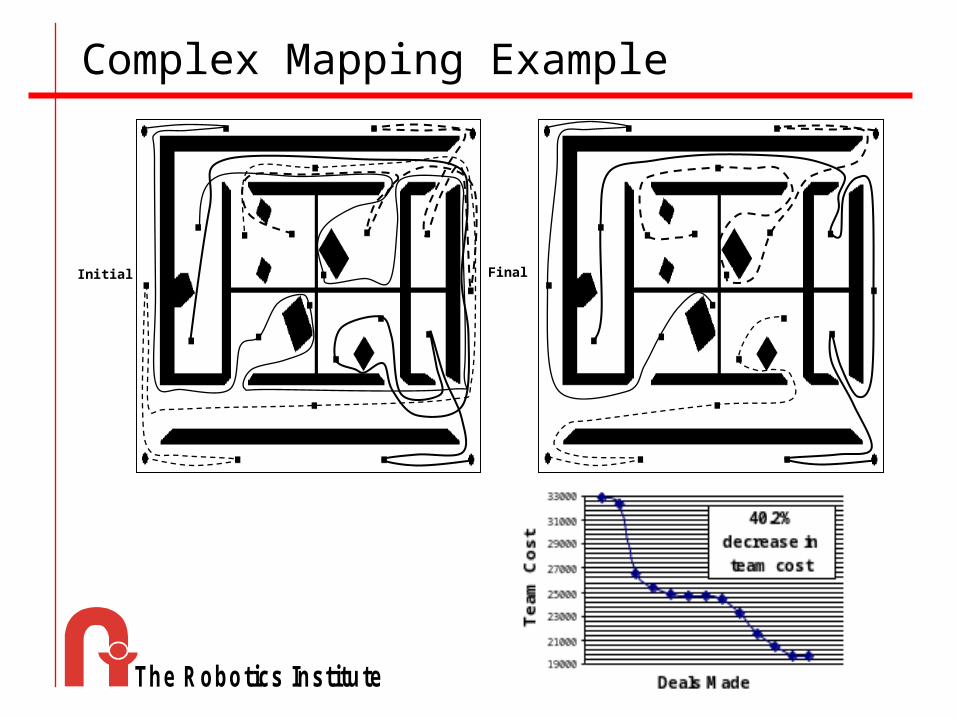
Complex Mapping Example
Initial Final
The Robotics Institute
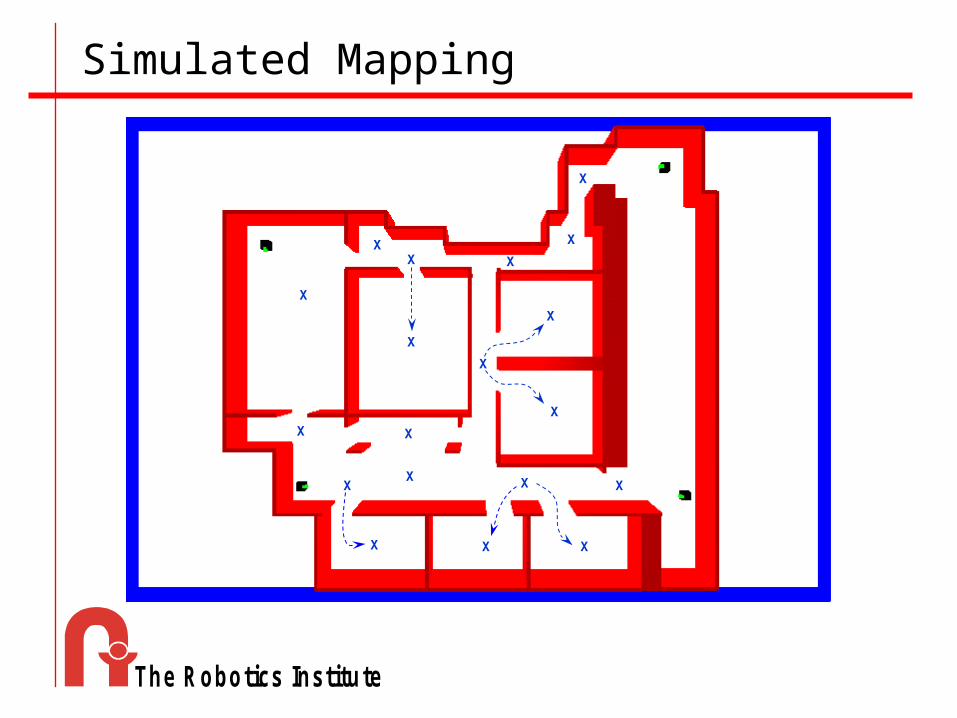
Simulated Mapping
X
X
X
X
X
X
XX
X X
X
X
X
X
X
X
X
X X
The Robotics Institute
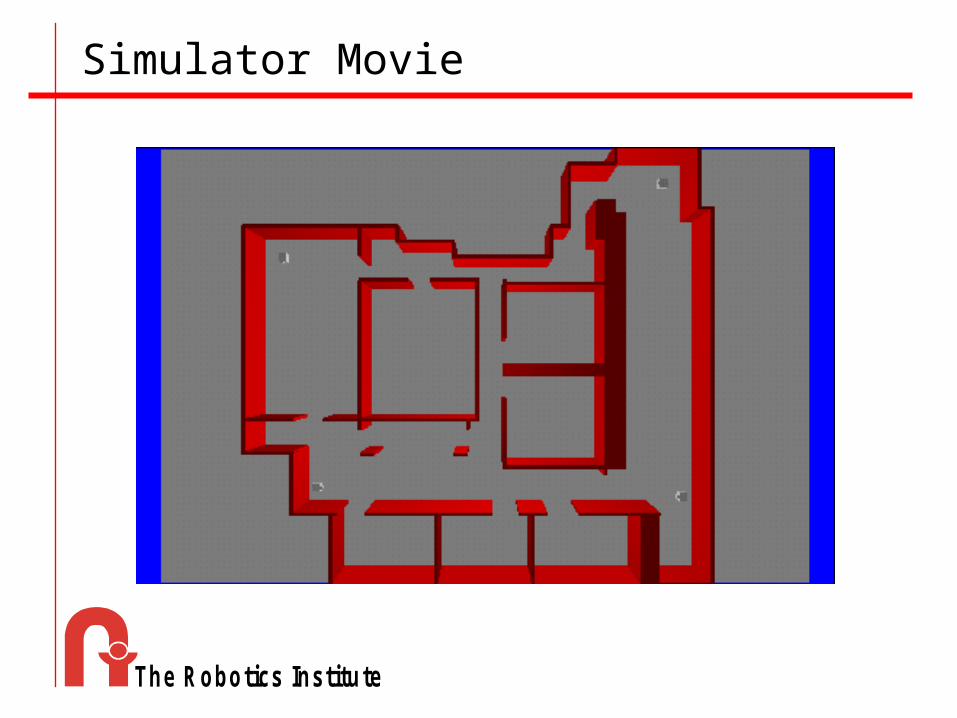
Simulator Movie
The Robotics Institute
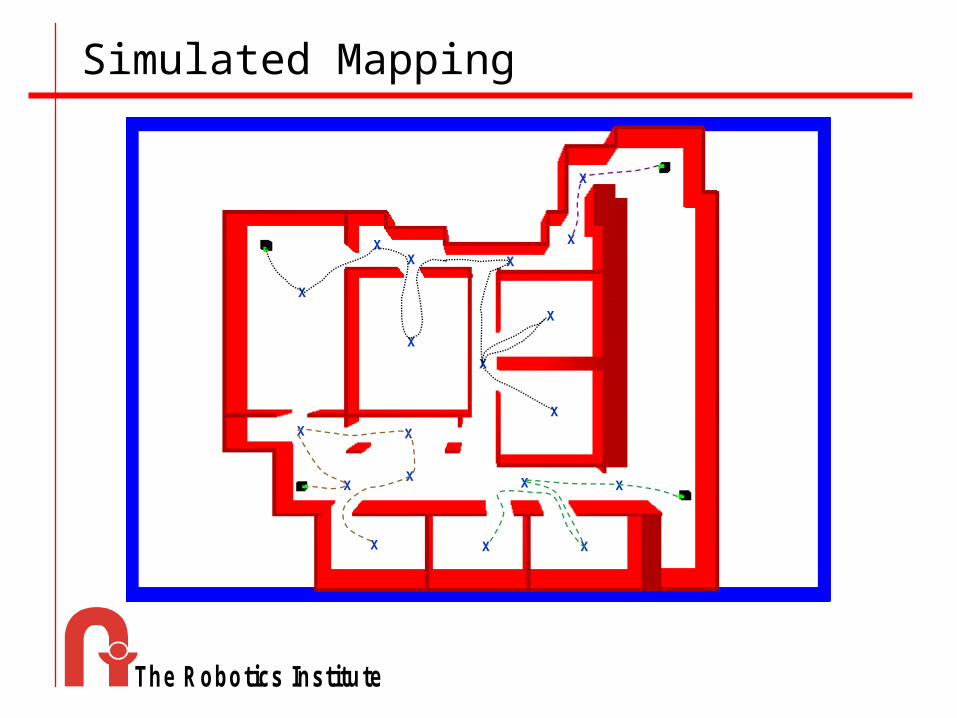
Simulated Mapping
X
X
X
X
X
X
XX
X X
X
X
X
X
X
X
X
X X

The Robotics Institute
Architecture Features
Revenue, cost and profit Negotiation and price Competition vs. cooperation Role determined via comparative
advantage Self organization Learning and adaptation
The Robotics Institute
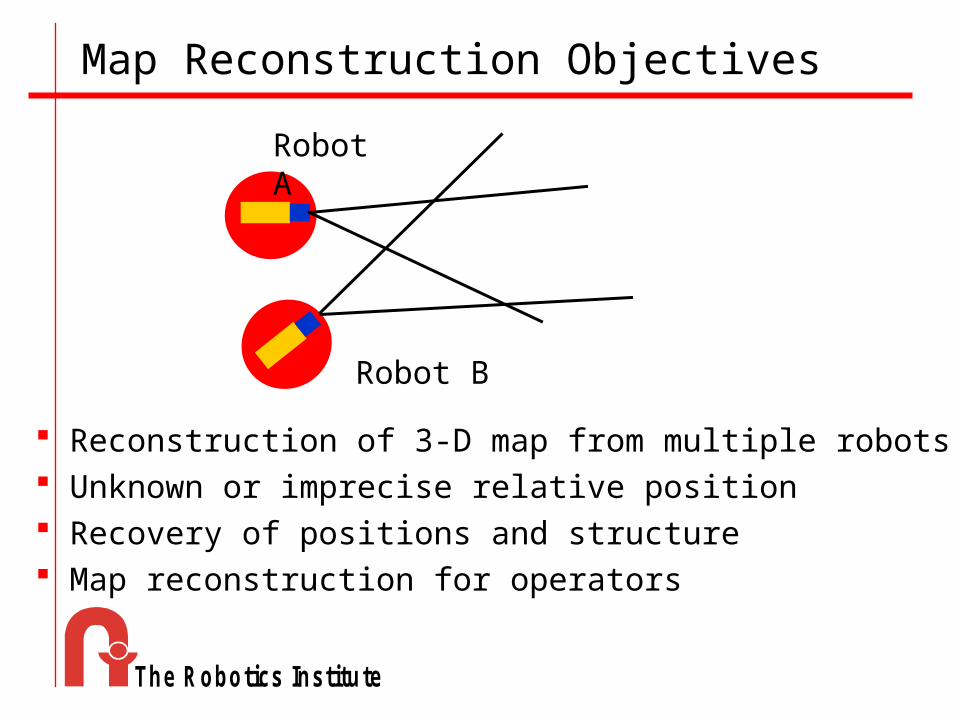
Map Reconstruction Objectives
Reconstruction of 3-D map from multiple robots Unknown or imprecise relative position Recovery of positions and structure Map reconstruction for operators
Robot A
Robot B
The Robotics Institute
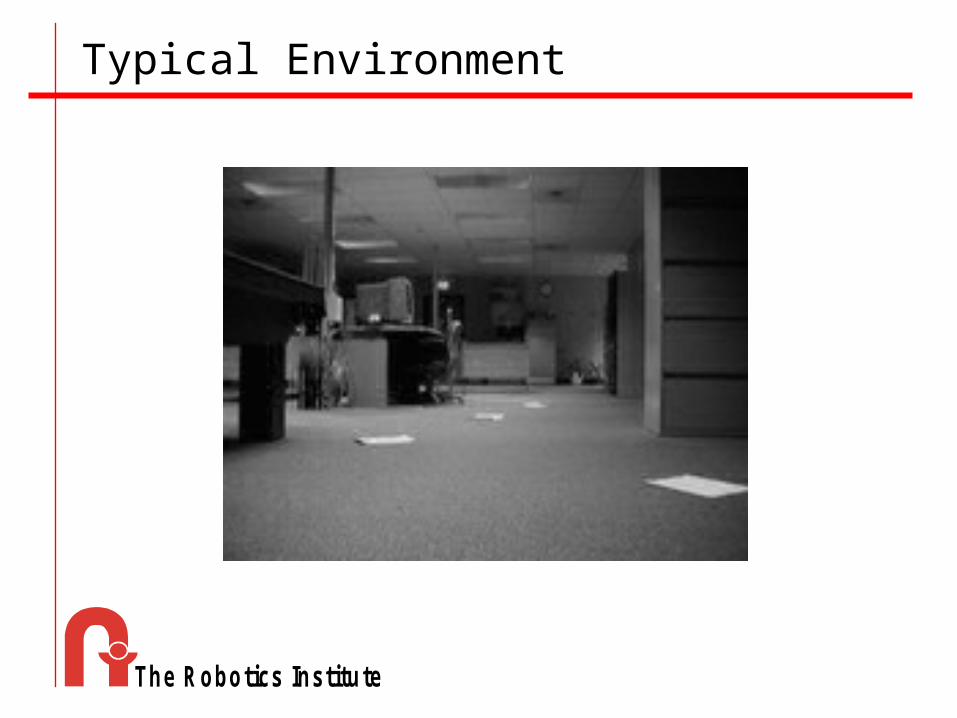
Typical Environment
The Robotics Institute
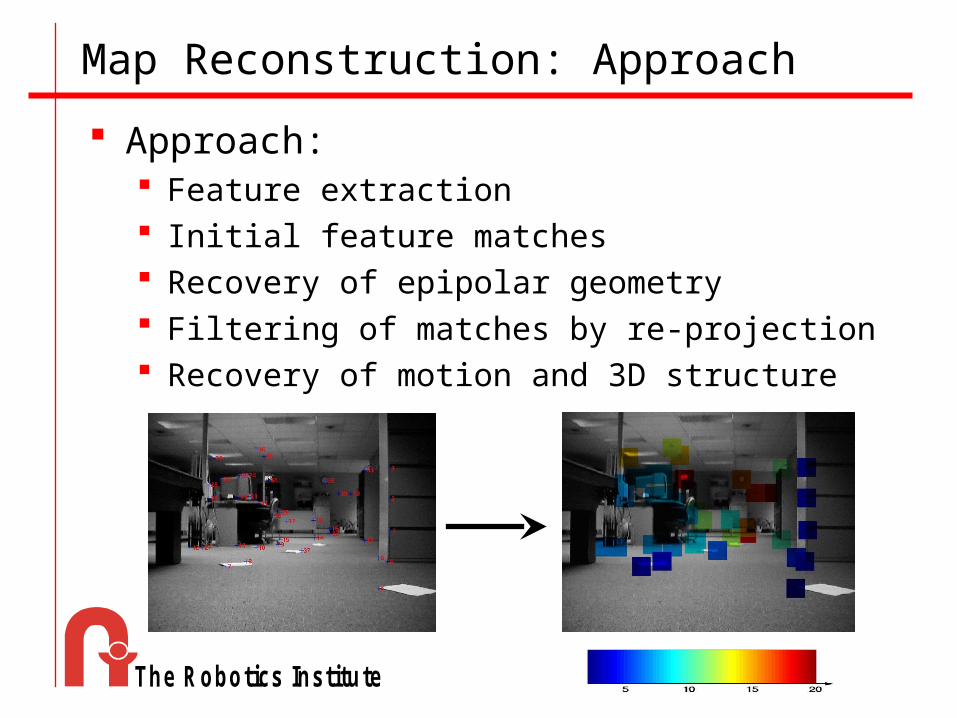
Map Reconstruction: Approach
Approach: Feature extraction Initial feature matches Recovery of epipolar geometry Filtering of matches by re-projection Recovery of motion and 3D structure
The Robotics Institute
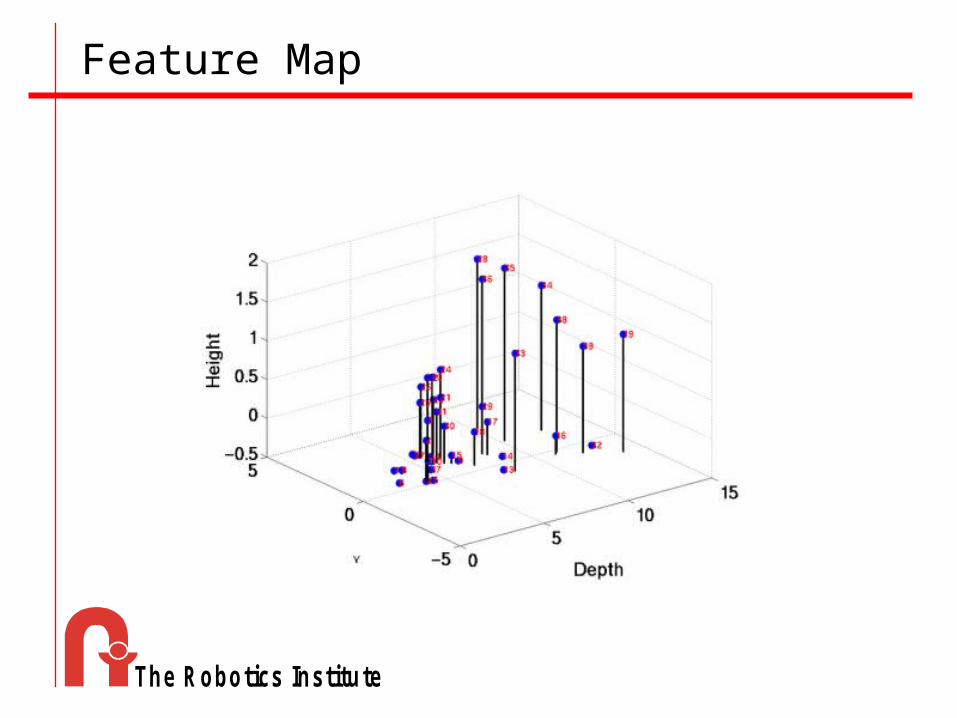
Feature Map

The Robotics Institute
Feature Matching and Depth Recovery

The Robotics Institute
Feature Map

The Robotics Institute
Communal Learning
The Robotics Institute
Robot Death and Sacrifice
Quickly learning causes of robot death required for colony survival
‘Buddy System’ used to preserve fatal situations and actions
When robot sacrifice is required maximal cause of death information will be extracted
Causes of death are high value commodities and quickly disseminated through the colony
The Robotics Institute
Robots in Action

The Robotics Institute
Current Status
Five working robot test beds with navigation, obstacle avoidance, point-to-point communication, and image streaming
First version of software architecture working for distributed coverage tasks
First version of cooperative stereo implemented with automatic feature selection
Prototype colony interface designed
The Robotics Institute
Next Steps
Port the architecture to the real robots Extend the architecture to support all
robot roles needed for distributed mapping
Add learning for behavior parameters and transaction confidences
Perform map integration from multiple sensing points