Coding Theory Adapted to Gait Perception
17
Journal of Experimental Psychology: Human Perception and Performance 1981, Vol. 7, No. 1,71-87 Copyright 1981 by the American Psychological Association, Inc. 0096-1523/81 /0701 -0071 $00.75 Coding Theory Adapted to Gait Perception James E. Cutting Cornell University Restle's coding theory for movement perception is merged with certain aspects of Johansson's vector descriptions of movement to investigate the relative per- ceptual prominence of several kinds of displays of human walkers. Two versions of a coding model are entertained. The first considers the results of a demon- stration and an experiment in which points of light are mounted in either of two ways: on major joints of the body or off them. Results suggest that on-joint displays are the better figures but that off-joint displays are fully adequate for representing human motion. Vector codes and a system for relating them are developed to reflect these results. This first model, however, is inadequate for a second demonstration in which the spatial relations among the lights are scram- bled. The model's problem lies in the fact that it does not discriminate between a canonical walker display and the spatially anomalous one. Thus, the model is elaborated into a second form to account for the difference. It incorporates what my colleagues and I have called centers of moment. The force of this exercise is to demonstrate the necessity for movements and spatial extent to be coded interactively. Only in this way can a coding theory work in the domain of gait perception. Johansson (1973) demonstrated that the actions of human beings could be identified from the movements of lights mounted on the major joints of the body. That is, with the surround darkened, the flow pattern of these lights is sufficient to determine the presence of an individual painting a wall, bicycling, walking, running, or doing push- ups. This technique is not new—it is, in fact, over a century old (see Marey, 1895/1972)— but Johansson was the first to apply it to a study of complex event perception. Following Johansson's lead, my colleagues and I have begun to explore the perception of these and other complex displays. The beauty of schematic, complex displays lies in the fact that one can formalize the math- ematics of their motion and perhaps their perceptions as well. With this goal in mind, This research was supported by National Institutes of Health Grant MH 35530 to the author and was made possible by the psychology department of Stanford University, where the author spent a sabbatical/leave from Wesleyan University. I thank Carol Krumhansl, Dennis Proffitt, and Frank Restle for their comments and Carl Latkin for his aid with Experiment 1. Requests for reprints should be sent to J. Cutting, Department of Psychology, Uris Hall, Cornell Univer- sity, Ithaca, New York 14853. we have explored not only the perception of gait (Cutting, 1978a; Cutting & Kozlowski, 1977; Cutting, Proffitt, & Kozlowski, 1978) but also the perception of rolling motion (Proffitt & Cutting, 1979; Proffitt, Cutting, & Stier, 1979) and the perception of aging faces (Cutting, 1978b). In each of these do- mains, and in several others (Cutting & Proffitt, in press), we have suggested that perception is guided by an abstract entity. We call it the center of moment, and it is a point in the geometric space of the object around which all points within the structure have systematic reference. Its locale for a walker determines gender, its locale for a cluster of lights mounted on a wheel deter- mines how wheellike that structure will ap- pear when rolling, and its locale for a sche- matic profile of a human face determines how well certain transformations of that pro- file will generate younger- and older-looking people. One problem with our previous accounts of event perception and centers of moment is that they are not very rigorous. In general, we have offered no formal specification of what we mean by a "point around which everything moves," and in particular we have not formally specified nested relations 71
Transcript of Coding Theory Adapted to Gait Perception

Journal of Experimental Psychology:Human Perception and Performance1981, Vol. 7, No. 1,71-87
Copyright 1981 by the American Psychological Association, Inc.0096-1523/81 /0701 -0071 $00.75
Coding Theory Adapted to Gait Perception
James E. CuttingCornell University
Restle's coding theory for movement perception is merged with certain aspectsof Johansson's vector descriptions of movement to investigate the relative per-ceptual prominence of several kinds of displays of human walkers. Two versionsof a coding model are entertained. The first considers the results of a demon-stration and an experiment in which points of light are mounted in either of twoways: on major joints of the body or off them. Results suggest that on-jointdisplays are the better figures but that off-joint displays are fully adequate forrepresenting human motion. Vector codes and a system for relating them aredeveloped to reflect these results. This first model, however, is inadequate for asecond demonstration in which the spatial relations among the lights are scram-bled. The model's problem lies in the fact that it does not discriminate betweena canonical walker display and the spatially anomalous one. Thus, the model iselaborated into a second form to account for the difference. It incorporates whatmy colleagues and I have called centers of moment. The force of this exerciseis to demonstrate the necessity for movements and spatial extent to be codedinteractively. Only in this way can a coding theory work in the domain of gaitperception.
Johansson (1973) demonstrated that theactions of human beings could be identifiedfrom the movements of lights mounted onthe major joints of the body. That is, withthe surround darkened, the flow pattern ofthese lights is sufficient to determine thepresence of an individual painting a wall,bicycling, walking, running, or doing push-ups. This technique is not new—it is, in fact,over a century old (see Marey, 1895/1972)—but Johansson was the first to apply it to astudy of complex event perception.
Following Johansson's lead, my colleaguesand I have begun to explore the perceptionof these and other complex displays. Thebeauty of schematic, complex displays liesin the fact that one can formalize the math-ematics of their motion and perhaps theirperceptions as well. With this goal in mind,
This research was supported by National Institutesof Health Grant MH 35530 to the author and was madepossible by the psychology department of StanfordUniversity, where the author spent a sabbatical/leavefrom Wesleyan University.
I thank Carol Krumhansl, Dennis Proffitt, and FrankRestle for their comments and Carl Latkin for his aidwith Experiment 1.
Requests for reprints should be sent to J. Cutting,Department of Psychology, Uris Hall, Cornell Univer-sity, Ithaca, New York 14853.
we have explored not only the perception ofgait (Cutting, 1978a; Cutting & Kozlowski,1977; Cutting, Proffitt, & Kozlowski, 1978)but also the perception of rolling motion(Proffitt & Cutting, 1979; Proffitt, Cutting,& Stier, 1979) and the perception of agingfaces (Cutting, 1978b). In each of these do-mains, and in several others (Cutting &Proffitt, in press), we have suggested thatperception is guided by an abstract entity.We call it the center of moment, and it isa point in the geometric space of the objectaround which all points within the structurehave systematic reference. Its locale for awalker determines gender, its locale for acluster of lights mounted on a wheel deter-mines how wheellike that structure will ap-pear when rolling, and its locale for a sche-matic profile of a human face determineshow well certain transformations of that pro-file will generate younger- and older-lookingpeople.
One problem with our previous accountsof event perception and centers of momentis that they are not very rigorous. In general,we have offered no formal specification ofwhat we mean by a "point around whicheverything moves," and in particular wehave not formally specified nested relations
71
72 JAMES E. CUTTING
in the dynamic array. The brunt of this ar-ticle is to render these notions more formal.In particular, I will adapt a coding theoryof motion perception to the perception of gaitand gait-related displays.
Recently, Restle (1979) presented a cod-ing theory for the perception of moving clus-ters of lights. It is an adaptation of Leeu-wenberg's (1971, 1978) theory for theperception of static forms and line drawings.Restle proposed that the perceived coherencein a dynamic display can be captured for-mally by the measurement of the number ofshared parameters among the moving lights.The power of his formulation is that possibleperceptual interpretations can be ordered interms of prominence, that is, the likelihoodthat the perceptual system imposes such par-ticular organization. This is done by com-paring the information loads of the variousperceived forms—roughly, counting thenumber and nestings of various parametersof movement—with the potential informa-tion load of the display considered as if ithad no shared parameters. In short, the morethat it shared, the more prominent the per-ceived form.
Restle's (1979) coding model is most el-egant for considering the simple motion ofa few points. It seems to lose its elegance,though not its power, when the motions ofmany lights are considered. But it loses itsgeneralizability when those lights do notmove in a circular pattern. Of course, Restlemade no attempt to apply his coding modelto demonstrations other than those of Jo-hansson (1950) and a few related phenom-ena, and thus he cannot be faulted for notapplying his model to Johansson's later dem-onstrations. Nonetheless, in a domain likegait, in which the motions are primarily pen-dular and not degenerations of circular pat-terns, application of his coding model cannotbe straightforward. To retain a certain de-gree of simplicity while adapting it to thecomplex patterns of human locomotion,changes must be made. It should come asno surprise that those suggested here ulti-mately include the center of moment. Theyare also entirely consistent with the ideas ofJohansson (1958, 1977; Johansson, von Hof-sten, & Jansson, 1980).
A five-step approach will be taken toward
an understanding of motion perception ingait and gait-related displays. Since coding-theory analysis begins with what is seen, thefirst step is a demonstration assessing a par-ticular gait pattern and configuration notused in previous studies. The second step isan experiment comparing this novel config-uration with configurations more similar tothose used previously. The third step involvesthe presentation of a version of a codingmodel to account for the data in the firstdemonstration and the experiment. Thefourth step entails a second demonstration,with another novel gaitlike pattern and con-figuration. This forces a fifth step, where Ipresent a revised coding model and apply itto all data on gait.
Demonstration 1: Identification of aWalker With Lights Mounted off Joints
There is some dispute concerning one as-pect of gait perception. A number of col-leagues have told me that when points oflights are mounted off the major joints ofthe body, the presence of a human being isnot seen in the dynamic display. This struckme as curious, if not implausible. The rootsof the claim are not clear, but Johnson-Lairdand Wason (1977), for example, wrote thatto perceive a human walker, one theory
predicts that lights at major joints would facilitate thisprocess, whereas lights in the middle of the limbs wouldnot, and indeed Johansson reports that the latter do notgive rise to the perception of a man walking, (p. 343)
They refer to Johansson (Note 1), but I canfind no mention of such a result there or inJohansson (1973). Regardless, it seemed tome that a demonstration using such a displaywould be a good place to begin a coding the-orylike analysis because it provides an in-teresting, alternative structure to the gaitstimuli used previously.
Method
The dynamic stimulus was generated by a FORTRANprogram displayed on a Tektronix 604 monitor displayscope and driven by a Data General Nova computer.(Instrumentation and listing of that program are givenin Cutting, 1978c, and a more complete description ofthe parameters involved may be found in Cutting,1978a.) In essence, the program generates moving clus-ters of lights that mimic the movements of a human

CODING THEORY AND GAIT PERCEPTION 73
walker; it is as if the points of light were mounted onthe major joints of an individual as she or he walks fromleft to right across a dark stage. In the original program,lights represented movements of the right shoulder andthe right hip, and the left and right elbows, wrists, knees,and ankles. Occlusions of lights occurred at naturalplaces within the step cycle. An l l th light was alsopresent, as if mounted on the head. The head, of course,is not a joint, and Johansson (1973), Cutting and Ko-zlowski (1977), and Kozlowski and Cutting (1977) dem-onstrated that the head is not necessary to these displays.Nevertheless, it was added to make the stimuli look morenatural.
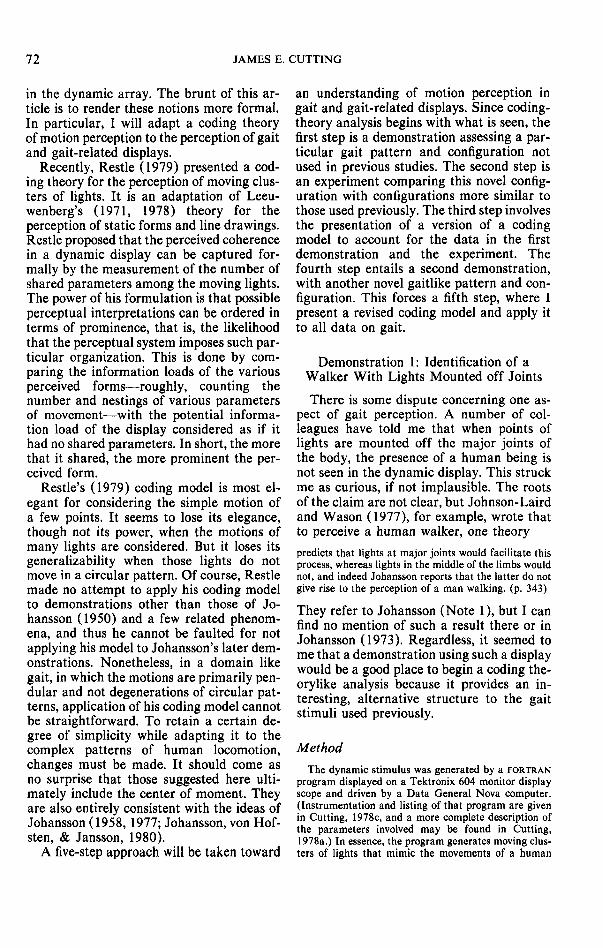
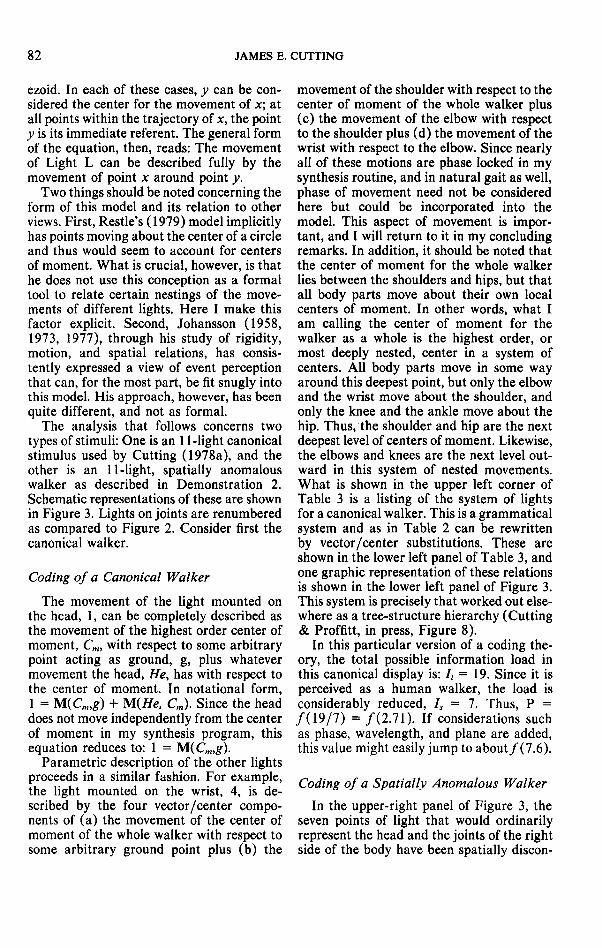
The core program was modified to display lights asif mounted halfway between the major joints. This re-duced the total number of lights to seven: one on theright biceps, one on each of the forearms, one on theright thigh, one on each of the calves, and one on thehead. In addition, a ground line was added, on whichthe stimulus "walked." This stimulus with ground lineis shown in schematic form in the lower panel of Figure1. Of course, the figure outline was not present in thedisplay.
This one stimulus was videotape-recorded and shownto 10 viewers en masse as part of a course project. Visualangle was between 2° and 4°. These viewers were fromthe Wesleyan University Graduate Summer School, hadno experience at viewing point-light displays, and weregiven no instructions except simply to write down whatthey saw in the display. The stimulus was on screen for3.6 sec, taking six steps.
Results and Discussion
All 10 viewers reported seeing a personwalking. Later, when I replayed the stimulusand asked the viewers where the lights weremounted, all reported that the lights weremounted on the body. When asked to bemore specific, the viewers responded inmixed manner. Some suggested that lightswere mounted on joints, some gave responsessuggesting that lights were mounted onfleshy areas of the body, and others re-sponded that some lights were mounted onand some off the joints. None suggested thatthe display was anything other than a realhuman being, and all expressed surprise thatit was computer generated.
Probed further about the movement of thearms and legs, most viewers reported a nor-mal bending of arms and legs. This finalaspect of the percept is theoretically impor-tant. From statements by Johansson (1973,1975), one would have to assume that hewould claim that lights mounted only on thebiceps and forearm would be seen as a pistonoscillating in phase as a pendulum. Givenlights mounted elsewhere on a walker, how-
on jointrepresentation
off-Jointrepresentation
Figure 1. Schematic representations of a male walker.(In the upper panel, lights are mounted on the head, onthe right shoulder and hip, and on the right and leftwrists and ankles. In the dynamic displays only the lightsare seen. This is called an on-joint representation of awalker. In the lower panel, lights are mounted on thehead, on the upper right arm and leg, and on the lowerright and left arms and legs. These lights are halfwaybetween major joints, and the configuration is called anoff-joint representation of a walker. Notice that the twotypes of stimuli have the same number of lights.)
ever, the robustness of the perception of ahuman form appears to supervene this typeof perception. It is seen clearly as a swingingarm, not a swinging piston. This is undoubt-edly due, in part, to overlearning and generalfamiliarity with human movement.
The extreme form of the claim put forthby Johnson-Laird and Wason (1977) is in-correct: A human form can be seen in a dy-namic display where points of light havebeen mounted off the joints. However, it re-mains possible, in fact likely, that some lessextreme form of the claim is true. Perhapsdisplays with lights mounted off joints areless convincing as stimuli than are those withlights mounted on joints.
If I were to ask viewers simply to compareon- and off-joint displays I was afraid thatdemand characteristics and other extraneousvariables might intercede. Thus, rather thantaking such a direct approach, I chose anindirect one. My previous use of these stimulihad been primarily in asking viewers to makegender judgments of the displays, that is,indicating which walkers were male andwhich were female (Cutting, 1978a). Thus,

74 JAMES E. CUTTING
1 decided to ask viewers to make such judg-ments of on-joint and off-joint displays thatwere programmed to emulate male and fe-male gaits. From these results I would makeinferences concerning the general goodnessof form in these displays.
Experiment 1: A Comparison of On-Jointand Off-Joint Displays
Method
The base algorithm of Cutting (1978c) was used. Themost malelike and the most femalelike movements werechosen from those used by Cutting (1978a). These dis-plays differ in the locus that generates the movements.Practically speaking, this means that they differ in theamount of shoulder swing as compared to hip swing.Ratios of these two movements for the male walker was4/1 and for the female 1/4. Changes in the movementsof shoulder and hip cause changes in the movements ofall other points in the display.
Off-joint displays were generated as discussed in theprevious demonstration. On-joint displays were similarin that they had the same number of lights, but thelights were mounted on the joints of the body. That is,they were placed as if they were on the right shoulder,left and right wrists, right hip, left and right ankles, andthe head. No lights were on the elbows or knees, andas suggested before, these are unnecessary to perceivethe motion of arms and legs. Both types of stimuli areshown in schematic form for a male walker in Figure1. Ground lines were present for both stimulus types.
Two videotape sequences were prepared. Each con-sisted of 16 stimuli: 2 types of stimuli (on and offjoints) X 2 genders (male and female) X 4 repetitionsof each item, with 8 sec between trials. Sequence 1 con-sisted of a randomization of all 16 items, and Sequence2 consisted of two blocks of eight stimuli, in which alleight of one stimulus type were segregated from theother.
Three groups of viewers participated in the study.Group 1 consisted of 116 students of introductory psy-chology at Wesleyan University participating as part ofa course project. These viewers were selected from aclass of 270 and consisted of all students in the firstseven rows of the lecture hall who could see the videomonitor from a viewing angle of not less than 60° (90°being directly in front of the monitor). Visual angle forstimuli varied from about V4° to 2°. This range is com-parable to that of Kozlowski and Cutting (1977, Ex-periment 5). En masse, these viewers were presentedfirst a familiarization sequence showing lights mountedon all joints. These 11-light configurations will becalled canonical stimuli. Viewers were then shown Se-quence 1.
Group 2 consisted of 10 Wesleyan University under-graduates who were paid to participate in a more con-trolled setting. Singly or in pairs, they sat directly infront of a video monitor, with a stimulus visual angleof 3°-4°. Like Group 1, all were presented first with afamiliarization sequence of canonical stimuli. Then theywere presented Sequence 2 so that half viewed the on-
joint stimuli before the off-joint stimuli, and half viewedthem in reverse order.
Group 3 consisted of the 10 viewers from Demon-stration 1. After viewing the demonstration item severaltimes, they viewed, en masse, the off-joint block of Se-quence 2 before the on-joint block.
Results and Discussion
The judgments of gender were generallymore accurate for on-joint stimuli than foroff-joint stimuli. This pattern is apparent forall three groups, as shown in Table 1.
These results were perhaps most clear forGroup 1. Gender of on-joint stimuli was ac-curately determined on 65% of all trials,/(115) = 8.6, p < .001, whereas gender foroff-joint items as determined on only 56%of all trials, f(115) = 3.77, p< .001. Thisdifference was reliable, f(115) = 3.9, p<.001. However, the mixture of the two typesof stimuli within one test order produced anunanticipated result. Many viewers, perhapsunable to make gender judgments of the kindthat I asked, seemed arbitrarily to assign theon-joint stimuli to one gender category andthe off-joint stimuli to the other. Since theovert demand of the experiments was tojudge gender, and since the on-joint/off-joint distinction was certainly more salientthan the male/female distinction, manyviewers appeared to comply by parsing thestimulus domain according to the most vis-ible distinction. Luckily, assignments of off-joint stimuli to males and on-joint stimulito females were about as frequent as the re-verse configuration, but results still suggestregression toward the mean.
Group 2, then, saw the on-joint and off-joint sequences in counterbalanced order.Their results show better performance andthe same general superiority of the on-jointstimuli: The gender of on-joint stimuli wascorrectly determined on 71% of all trials,t(9) = 2.68, p < .02, and that for off-jointstimuli was determined on only 65%, t-(9) = 2.07, p < .07. Unlike that for Group1, however, this difference was not statisti-cally reliable.
The question remains, however, as towhether off-joint stimuli would be accu-rately judged if the viewers had not had priorexperience with point-light stimuli. In otherwords, all viewers in the first two groups had

CODING THEORY AND GAIT PERCEPTION 75
Table 1Percentage Correct Identification of Computer-Generated Male and Female Walkers
Condition
Lights on joints
Group
laib (116)2" (10)3d (10)
M SE
68 471 1767 7
F SE
63 371 1661 6
M
65**71*64**
Lights off joints
M SE
56 471 1349 9
F SE
56 359 1654 10
M
56**6551
Note. M = male, F = female, SE = standard error. Numbers in parentheses are ns." Test preceded by exposure to canonical stimuli (those with lights on all major joints).b On-joint and off-joint stimuli presented randomly intermixed within same test sequence.c On-joint and off-joint stimuli separated into blocks, with block order counterbalanced.d Viewers had no prior experience with these stimuli. The off-joint condition preceded the on-joint condition.* = p < .05, ** = p < .01.
seen canonical stimuli, with lights mountedon all joints, before judging on- and off-jointstimuli. It could well be that the off-jointrepresentations would not be sufficient forthe representation of gender if viewers hadnot seen the canonical stimuli before them.Group 3, then, viewed the off-joint stimulibefore the on-joint stimuli. These viewerscorrectly determined the gender of off-jointdisplays on only 51% of all trials (t < 1),whereas they judged correctly the on-jointconfigurations on 64% of all trials, t(9) =3.3, p< .01.
The overall pattern of results is clear.Removing the elbow and knee lights fromthe canonical displays interfered little withviewers' ability to make gender judgments.This result is consistent with those of Ko-zlowski and Cutting (1977, Experiment 5),who found that, in general, no pair of lightswas necessary to the display and that nearlyany pair was sufficient. Moving all lights offjoints, however, did interfere with genderidentifiability. In fact, when viewers have noexperience at perceiving these displays, theyappear not to be able to make gender judg-ments at all.
Notice the "male" response bias in on-joint conditions for Groups 1 and 3 and inthe off-joint condition for Group 2. Thesepatterns are consistent with those found pre-viously. Cutting (1978a) reported that thiscomputer algorithm seemed somewhat moresuccessful at generating male gait than fe-male gait. Since this bias seems to occur for
all types of stimuli and is orthogonal to myconcerns, it does not detract from the maineffect of gender identification as discussedin this section.
In summary, then, these results supportan inference about the perception of thestimuli: Insofar as accuracy and consistencyof gender judgments can be taken as an in-dex of goodness of figure in these dynamicdisplays, on-joint displays are better stimulithan are the off-joint displays. Why this maybe so is pursued in the following section, inwhich I introduce a variant of Restle's(1979) coding model.
A First Model: Vector Codes
Johansson and Restle for a Rolling Wheel
The crux of Johansson's analyses of move-ment is that common motion vectors are ex-tracted from a dynamic display containingcomponents of a figure that move in complexways. Consider a case from the perceptionof rotary motion in which two lights aremounted on a wheel, one at the center andone on the perimeter. The path of the lightat the center will describe a straight line asthe wheel rolls across a flat surface. The lighton the perimeter will describe a cycloid andcan be most easily considered as composedof two vectors, the translatory vector and therotational vector of the wheel. According toJohansson (1973, 1975), since the two lightsshare the translatory (or straight-line) vector

76 JAMES E. CUTTING
of the wheel, and since the residual of thecycloidal motion of the perimeter light is arotational vector, a rolling wheel is seen.
Johansson states that a rolling wheel isseen because the visual system extracts thecommon vector first—that of translation—and then perceives residual motion as indi-cating the object's action and form—a roll-ing wheel. Wallach (1965) has suggested thesame two-step process but in reversed order.He contended that object-relative motion isseen first (one light moving circularly aboutthe other) and angular displacement second(the group of lights moving across the visualfield). Elsewhere evidence has been pre-sented in support of Wallach's view (Proffitt& Cutting, 1979; Proffitt et al., 1979). Forthis discussion, however, the results do notdetract from Johansson's insight: The move-ment of lights mounted on an object can bethought of as generated through vector ad-dition; perception of the object representedonly by these lights is accomplished throughvector decomposition. One aspect of Jo-hansson's approach that appears problem-atic is that he does not tell us how the per-ceptual system decomposes complex vectorsin the appropriate way, except through anappeal to simplicity, projective geometry,and the fundamental three-dimensionalityof space. In particular, it is not a trivial prob-lem as to how one should arrive at a commonvector first, without appeal to residual com-ponents, nor is it always clear what consti-tutes simplicity (Sober, 1975).
Restle's (1979) coding theory of puremovement shares certain features with Jo-hansson's approach. Its strength is that itoperationalizes Johansson's (1950, 1973)concept of simplicity. It claims that movingclusters of lights are seen as coherent entitiesrather than as a conflation of random lightsbecause their coherence is based on sharedparameters of movement, all based on cir-cular motions. When coding movement intocomponent parameters, the description of arolling wheel, for example, would need fewerfree variables than would the description oftwo lights moving independently, one in cy-cloidal and the other in linear fashion. Res-tie's argument is that the perceptual systemchooses a description of the stimulus that ismost parsimonious when compared to the
total possible variables that might have beenused for specifying the movements of alllights.
Two problems. Restle's model is re-stricted to motions generated on a circle. Assuggested earlier, pendular motions, such asthose seen in human body movements, posesomewhat of a problem. For example, hisfive parameters—phase, amplitude, rate,axis of movement, and tilt—could applyequally well to pendular motion. Thus, al-though one could use Restle's system forpendula or for circles, one could not discrim-inate between them without providing somehigher order code for the type of movementdomain, pendular or circular. Moreover,these are not the only two domains to whichthese five parameters could apply, they arejust mechanically the most obvious. Onecould just as easily apply them to movementsof a light along a square-shaped path (seeJohansson, 1975), a triangular one, or anyother. Only our imagination limits us in thisdomain.
A second problem for Restle's current for-mulation, though not as serious, is transla-tion. His model provides no simple way tocode nonrepeating movement. Coding theoryis certainly flexible enough to add such pa-rameters for rate and direction of transla-tion, but within Restle's (1979) model it isnot clear where and how one would do this.This is important because the number ofvariables necessary to code this movementwould have direct influence on the absolute(though not relative) prominence value ofthe perceived configuration.
A Hybrid Approach for Human Walkers
Despite coding problems of movement do-main and of translation, I have found Res-tie's (1979) approach useful in formulatinga view about the gait research begun by Jo-hansson. From Johansson I will take the ap-proach of using rather complex vectors asprimitives in my description. That is, I willnot attempt to decompose movements fur-ther than the general motions performed bythe various parts of the human body. FromRestle I will take the approach of his codingtheory that assumes that the perceptual sys-tem extracts the most parsimonious descrip-

CODING THEORY AND GAIT PERCEPTION 77
tion of movements. This hybrid approachallows the computation of relative promi-nence values of perceived configurationswithout determining the hundreds of param-eters that make up human movement.
Consider one view of walking. By exten-sion from the example of a rolling wheel, thewalker has a vector of translation with anadditional component of undulation, an upand down movement attributed to the vary-ing height of the hips during the step cycle.This periodic, wavy pattern is the commonvector that underlies all movement in thehead, arms, legs, shoulders, and hips. Thus,points of light mounted on the joints of thebody share a common fate whose vector pathis the undulation and translation on walkingacross a flat surface. Pendular motions ofarms and legs are superimposed on this com-mon vector and make more complex paths.
One can assume that when considering on-and off-joint representations of walkers, Jo-hansson would point to the difference in re-sidual movements of the lights in the twoconditions. In the on-joint figures, the move-ments of the residuals would be pure pen-dula, whereas in the off-joint figures, thosemovements would be combinations of vec-tors of different pendula. To capture thisnotion I propose a vectorlike description forsynthetic on-joint and off-joint representa-tions of walkers. The notational system usedtakes the following general, simple form:L = M(x), where L stands for the particularlight under consideration and M(x) repre-sents the motion of a particular point. M(x)can be any complex vector and is used as aprimitive within this system. Thus, the equa-tion reads: The movement of L is describedwholly by the movement of x. Additions ofmovement will appear in the right-hand sideof many equations. These signify vector ad-ditions.
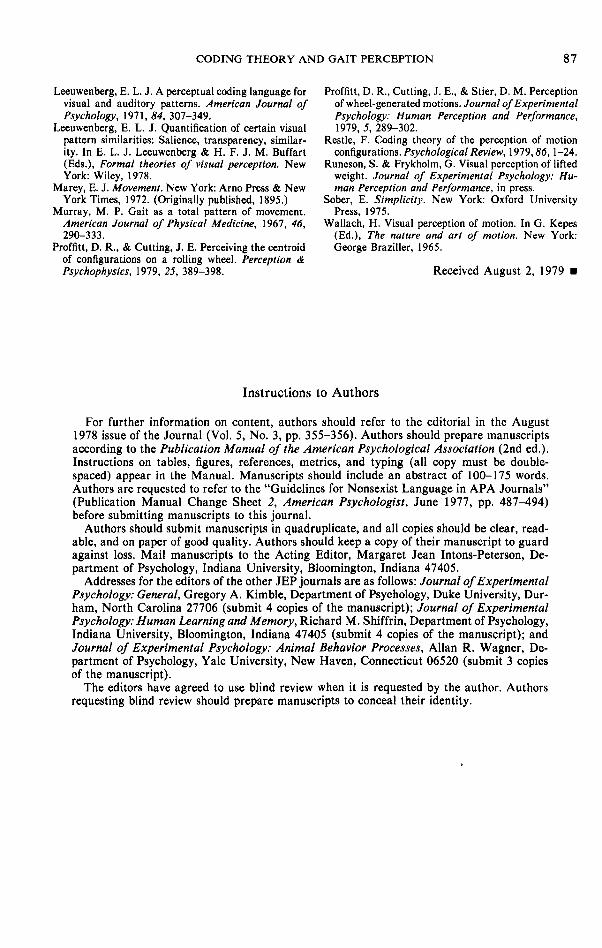
For simplicity's sake, consider the lightsrepresenting only the right side of the bodyof a synthetic walker who is walking fromleft to right at uniform velocity across a flatsurface. These lights are shown in the upperleft panel of Figure 2 for the on-joint stim-ulus and numbered 1-5 as representing thehead, shoulder, wrist, hip, and ankle, re-spectively. For the off-joint stimulus, theyare shown in the upper-right panel and num-
ON-JOINT OFF JOINT
REPRESENTATION REPRESENTATION
PHYSICAL C
DESCRIPTION
CONCEPTUALTRIE
STRUCTURE
Figure 2. In the upper panels are the physical, vectorlikedescriptions of the on- and off-joint walkers, consideringonly the right side of the body; below these are concep-tual tree structures representing the nesting of move-ments. (Notice that both figures have centers of mo-ment.)
bered l'-5' for the head, upper arm, lowerarm, upper leg, and lower leg, respectively.Vector additions and substitutions requisitefor this type of analysis are shown in Table2. Scrutiny of both Figure 2 and Table 2 willbe necessary for the account that follows.
Coding of an On-Joint Stimulus
Consider first the lights and their vectorpaths for the on-joint stimulus. The move-ment of the head, at least in the syntheticversions used in the preceding experimentand demonstration, can be described by sim-ply noting that it follows the same vectorpath of the highest order center of moment,Cm. This center of moment lies between theshoulders and hips, and its relative locationis proportional to the widths of the walker'sshoulders and hips (Cutting et al., 1978).
Two points are worth noting here. First,the vector path of the center of moment iscomplex and composed of at least three sim-ple vectors—uniform translation, a horizon-tal oscillation that contributes a lungingmotion, and near-vertical oscillation (or un-dulation). However, since this account al-lows use of rather coarse-grained movements

78 JAMES E. CUTTING
Table 2Vector Analyses for Computer-Generated Walkers
On-joint walker: /, = 13
Reduced code by vectorsubstitution: /, = 7,
P -/[///,)
Off-joint walker: /, = 15
1 = M(Cm) + M(He) = M(CJ2 = M(Cm) + M(S)3 = M(Cm) + M(S) + M(£) + M(»04 = M(Cm) + M(Hi)5 = M(Cm) + M(Hi) + M(K) + M(A)
1' = M(Cm) + M(He) = M(CJ2' = M(Cm) + M(5) + M(£)/2
3' = M(Cm) + M(5) + M(£) + M(W)/2
4' = M(Cm) + M(Hi) + M(AT)/25' = M(Cm) + M(Hi) + M(K) + M(A)/2
Reduced code by vectorsubstitution: /,= 11,
1 = M(CJ2 = 1 + M(S)3 = 2 + M(£) +4 = 1 + M(//l)5 = 4 + M(K) + M(A)
1' = M(CJ2' = 1' + M(S) + M(£)/23' = 1' + M(S) + M(£) +4' = 1' + M(tfi) + M(K)/2
5' = 1' + M(Hi) + M(K) + M(A)/2
Note. M = movement of the point that follows it; Cm = highest order center of moment; He = head, S= shoulder;E = elbow; W = wrist; Hi = hip; K = knee; A = ankle. Numbers refer to the movements of lights shown in Figure2. /, = total number of vectors needed to specify the lights independently; I, = total number of vectors needed tospecify the lights as a coherent system. P is the prominence of the perceived configuration as a function (/) of/, divided .by /,. See also Footnote 1.
as primitives within the system, no furtherdecomposition is necessary. Moreover, inthis account it is the sharing of vectors thatis foremost, and since, in my view and thatof my colleagues, all of the body shares themovement of this one point, it will serve toconsider it simply as a single vector. Second,the head usually sways from side to side dur-ing gait (see Murray, 1967) and thereforewhen projected onto the sagittal plane, shouldbob up and down slightly within the stepcycle over and above the general undulationof the body. This bobbing movement, how-ever, is slight when seen from the side, wasomitted from the computation of movement,and thus will be omitted from this analysis.Thus, for the light mounted on the head,1 = M(Cm) + M(He), or since the additionalcomputed movement of the head is null,1 = M(Cm). In this manner, the movementof the light on the head, 1 is entirely de-scribed by the movement of the Cm, or high-est order center of moment.
The movement of the light on the rightshoulder, 2, is composed of two complex vec-tors. First, it shares with the head (and all
other points) the movement of the Cm.Added to this is the vector of the shoulder.This movement is described by Cutting(1978a) as a counterclockwise ellipticalmovement due to the oscillation of the torso,which twists against itself in the manner ofa flat spring. Thus, 2 = M(CJ + M(S).That is, the movement of the light at theright shoulder is composed of the movementsof two vectors, that of the highest order cen-ter of moment and that of the shoulder.
The movement of the light on the rightwrist, 3, is composed of four vectors: that ofthe center of moment and the shoulder, plusthe additional movements of the (unseen)elbow and the wrist. Both the elbow and thewrist movements are pendular, moving re-spectively around the shoulder and the el-bow. Thus, 3 = M(CJ + M(£) + M(W),where E and W stand for the elbow and thewrist.
The movements of the lights mounted onthe hip and ankle are determined in a similarmanner to that of the shoulder and the wrist,where Hi, K, and A stand for hip, knee, andankle, respectively.
CODING THEORY AND GAIT PERCEPTION 79
The movements of these five lights interms of their vector composition are shownin the upper left panel of Table 2. For pur-poses of comparison consider next the vec-tors for an off-joint set of lights, as shownin the upper-right panel of Table 2.
Coding of an Off-Joint Stimulus
The light on the head is, of course, thesame in the off-joint version as it is in theon-joint version. Thus, its vector descriptionis the same. However, this is the last identitybetween the two types of stimuli.
The movement of the light on the upperarm, mounted exactly halfway between theshoulder and the elbow, can be described ascomposed of three complex vectors: themovement of the highest order center ofmoment, the movement of the shoulder, andhalf of the movement of the elbow. That is,since the light is mounted halfway down theupper arm pendulum, its excursion is halfthat of the elbow, which lies at the end ofthat pendulum. Thus, 2' = M(CJ + M(5)+ M (£)/2.1
The movement of the light on the lowerarm is composed of four complex vectors:those of the highest order center of moment,shoulder, elbow, and half of the wrist. Thus,3' = M(CJ + M(5) + M(£) + M(W)/2.In an analogous manner, the composite vec-tors are determined for the movements ofthe lights mounted on the upper leg (4') andlower leg (5'). These are shown in Table 2.
Reducing Codes to Minimal Form byVector Substitution
The differences between the on-joint andoff-joint versions of walkers become moreapparent when shared vectors are substi-tuted into the descriptions in the upperpanels of Table 2. Notice that for the on-joint representations, 2 = 1+ M(S). That is,the movement of Light 2 (mounted on theshoulder) is the same as that of Light 1, withthe addition of the S vector, the movementof the shoulder. In turn, the movement ofLight 3 can be described simply as the move-ment of Light 2 plus the vectors E and W,the movements of the elbow and wrist. In asimilar manner, the leg vectors can be com-bined to simplify the description.
Not so with the off-joint representation.As shown in Table 2, little vector substitu-tion can proceed and then only with the sub-stitution of the vector underlying Light 1 atthe head. This light has the same movementas the highest order center of moment.
Following the general form of Restle's(1979) coding theory, one can determine theinformation load of the movement of thewalkers. In my adaptation of the theory, this(/() is the number of primitive vectors neededto specify the movements of all lights if theyare considered as independent. For an on-joint walker, I,,= 13, since 13 vectors arespecified in the upper left panel of Table 2.The prominence (P) of any given perceptualinterpretation of any given configuration ofmoving lights is a function of // divided bythe total number of parameters needed tospecify the lights as a coherent system, I,.In the lower-left panel of Table 2 is the re-write structure of an on-joint walker, need-ing only seven different vectors. The prom-inence for the walker interpretation of thissystem of lights is P = fil,/l,) = /1.86).
For the system of lights that represents anoff-joint walker, the information load of thelight configuration is higher, /, = 15. Thatis, specifying the movements of all of thelights independently requires the specifica-tions of 15 complex vectors. When vectorsubstitution is performed, the informationload goes down only slightly, Is = 11. Thus,the prominence of this light array as awalker is considerably lower than that foran on-joint stimulus: P = f(It/Is) =/(1.36).
Two Qualifications
Before proceeding, two things should benoted. First, these prominence values, whencompared to Restle's (1979), are extremelylow. This deflation is due to the fact that myadaptation of a coding theory has omittedsuch considerations as phase, wavelength,
1 There are two possible interpretations of this notion.First, M(£)/2 could mean that the length of the pen-dulum is halved but that the angular excursion as mea-sured at the pivot remains the same. Second, it couldmean that the length is constant but that the angularexcursion is halved. I am using the first interpretationin my notation.

80 JAMES E. CUTTING
and the plane in which the movements takeplace. (Tilt and amplitude are specified ineach vector.) Since wavelength and the pic-ture plane are shared by all movements, andsince all are nearly locked in perfect syn-chrony or 180° out of phase, the prominencevalues for these displays would increasesharply with the addition of these factors.Roughly, this would multiply each /, by afactor of 4 but add to each /, only three (orslightly more) parameter specifications. Thus,prominence values for on-joint and off-jointwalkers might easily burgeon to approxi-mately f(5.2) and/(4.0), respectively. Thesevalues would be very high in Restle's system.
Second, and more important, Restle didnot compare prominence values across stim-uli; he compared them only within a givenstimulus for different perceived configura-tions. This would be prudent for computa-tional reasons alone, since P values will au-tomatically increase as the number of lightsinvolved in the display increases. Beyondthis, the comparison of prominence valuesacross different arrays of dynamic light con-figurations could yield inaccurate, evenmeaningless, estimates of the relative per-ceived goodness of the displays. Despitethese problems, I have chosen to compareprominence values across displays. The rea-sons are that the two types of displays haveequal numbers of lights and that they weregenerated from the same base algorithm andare—in an abstract sense—the same stimuli.
Accepting the validity of my cross-stim-ulus comparisons, then, what is importantto this discussion is not the magnitude of theprominence values but the difference be-tween them. Regardless of what version ofa coding theory is used, given that a walkeris seen, the on-joint representation will bebetter than the off-joint representation. Thiscan also be shown in terms of nestings withina tree structure. Such nestings are shown inthe lower panels of Figure 2. Notice that theon-joint walker is a two-branch system andthat the off-joint walker is a four-branchsystem. (In both cases the head is not con-sidered a branch but is separated from thecenter of moment of the walker so as not toconfuse them.) The two-branch system isclearly simpler than the four-branch one.
My point in this presentation is two-fold.
First, this adaptation of vector addition andcoding theory is enlightening for the com-parison of certain dynamic configurationsand provides theoretical substance to mydata and to a less radical version of Johnson-Laird and Wason's (1977) claim: Off-jointdisplays can be considered as poorer figuresthan on-joint displays and their prominencevalues are in line with experimental results.Second, this model, although in tenor di-rectly adapted from Restle (1979), cannotpossibly be correct as it stands. The reasonfor this will become clear in the discussionof a second demonstration.
Demonstration 2: A Spatially AnomalousWalker
Restle's (1979) model allows both the cod-ing of movement and form. That is, althoughfive parameters are necessary for the move-ments of particular lights, additional param-eters may be added to code spatial relationsamong the moving lights (see Restle, 1979,pp. 6-7). Logically speaking, however, hiscoding of form and movement are orthogo-nal. That is, the coding of spatial separationseems not to effect the coding of movementand, to a large degree, vice versa. This wouldbe of great benefit if aspects of figure andmotion did not interact. However, it is thepoint of this demonstration to show that fig-ural properties must be a part of movementdescription in a domain as complex as gait.
Method
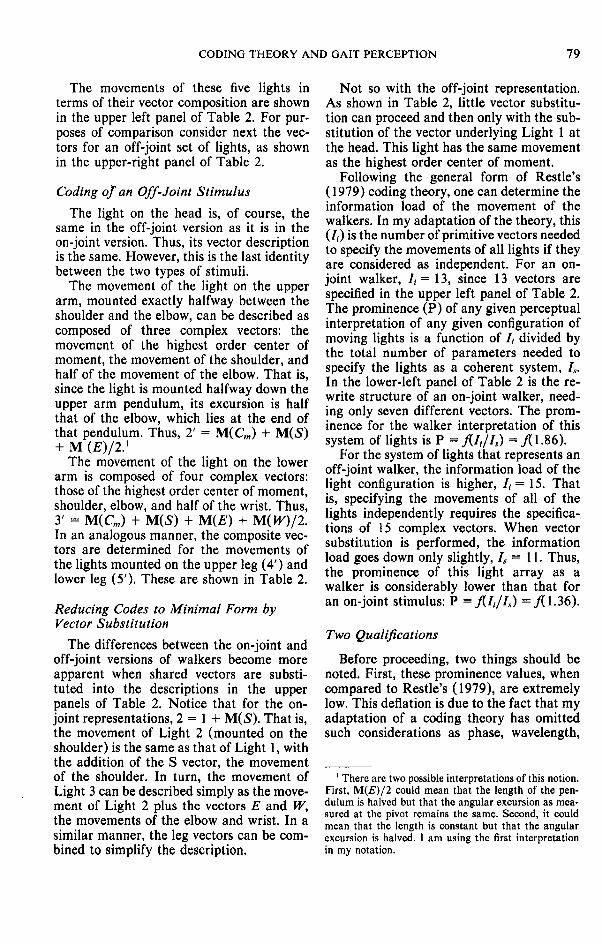
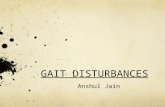
Using the same base algorithm mentioned before, an11-light dynamic configuration was generated. It wasidentical to those used by Cutting (1978a) for genderrecognition in gait except in one aspect. Unlike thosecanonical walkers, this display is scrambled in the par-ticular spatial locales of the points of light. Consider theright ankle as an arbitrary point of reference. By arti-ficially displacing the other body parts but holding theirabsolute motion constant, bizarre arrangements weregenerated. For example, the head was placed below theankle on the screen. Likewise, the right shoulder wasplaced below the ankle but considerably behind the lo-cale of the head. The right elbow, on the other hand,was placed marginally above the ankle, and so forth. Astatic approximation to this anomalous walker is shownin the upper right-hand panel of Figure 3. As in Figure2, only the right half of the walker is displayed in thefigure. Otherwise, the stimulus cycled and moved acrossthe screen as previous stimuli did but without a groundline.
CODING THEORY AND GAIT PERCEPTION 81
This stimulus was shown on the Tektronix screen tosix graduate students and staff members in the psy-chology department at Stanford University. All had seenmy computer-generated gait displays before. All wereasked simply to report what they saw.
Results and Discussion
None reported seeing the presence of ahuman walker. Responses split generallybetween descriptions of an abstract machinesquirming cyclically across the screen, sug-gesting some Kandinsky twittering device,and descriptions of cyclically related but in-dependent entities, suggesting somethingakin to a swarm of mechanical bees. Thus,no viewer reported that the display lookedhuman, but all reported coherence. Dataconcerning the perceptual salience of thisanomalous walker as compared to the ca-nonical walkers was not obtained and wouldbe difficult to interpret in any case. Here,again, one gets into difficulties making com-parisons across displays, rather than withina display for different interpretations. It ismy impression, however, and that of a fewother viewers, that the canonical stimuli arefar better as coherent and impressive stim-ulus events than is the anomalous display.
What I take to be important to this dem-onstration is that the movement parametersfor this anomalous walker are exactly thosefor the canonical displays. The only thingchanged is the relative physical placementof the lights, after the vectors have beencomputed. In other words, these vectors or-dinarily presuppose the structure of a ca-nonical walker, but they need not. Moreover,in a formal way, the coding model presentedearlier does not. As it stands, the physicalrelations among vectors can be scrambled,as in this demonstration, without the codingof the array being changed. Since the per-ception (and by inference the perceptual sa-lience) of the anomalous walker and the ca-nonical walker are different, and since mycodes for them are the same, I infer that mycoding model must be revised to reflect theperceptual differences. Insofar as my modelcan be taken as a correct adaptation of thespirit of Restle's (1979) model, this dem-onstration seems to suggest a similar inad-equacy in his current formulation: Interac-
CANONKAL IMTMUV ANOMALOWWALKIt WALKIB
PHYSICALDHCIirTION
Figure 3. In the upper panels are the physical, vectorlikedescriptions of a canonical walker and a spatially anom-alous walker, one whose particular spatial relationsamong lights has been markedly perturbed; below theseare conceptual tree structures of the nested movementsaround their generating centers. (Notice that only thecanonical walker has a true center of moment; that forthe anomalous walker is indeterminate in location.)
tions between spatial and dynamic relationsmay not be sufficiently dealt with. However,such a connection between this demonstra-tion and Restle's model is tenuous. Thus,what follows is the necessary revision of mycoding model, with a presently indetermi-nate relation to Restle's model. The crux ofthe change is the addition of a notion ofnested centers of moment.
A Second Model: Codes for Vectors andTheir Generating Centers of Moment
To capture both movement and spatialrelations in a formal analysis of perceptualevents, a new notation is needed. The oneI propose is of the general form: L = M(JC,y), where L is movement of the particularlight under consideration as a function of themovement M of point x with respect to pointy. The particular movement of any Light Lcan take the form of a circle, an ellipse, apendulum arc, or more complex combina-tions, depending on the mechanical structureunder consideration. The movement of pointx can be said to occur "around" point y.Thus, if x describes a circle, y is its center;if x describes a pendulum arc, y is the pivot;and if x describes a corner of an oscillatingflat spring in the shape of an isosceles trap-ezoid, y is the oscillation center of that trap-
82 JAMES E. CUTTING
ezoid. In each of these cases, y can be con-sidered the center for the movement of x; atall points within the trajectory of x, the pointy is its immediate referent. The general formof the equation, then, reads: The movementof Light L can be described fully by themovement of point x around point y.
Two things should be noted concerning theform of this model and its relation to otherviews. First, Restle's (1979) model implicitlyhas points moving about the center of a circleand thus would seem to account for centersof moment. What is crucial, however, is thathe does not use this conception as a formaltool to relate certain nestings of the move-ments of different lights. Here I make thisfactor explicit. Second, Johansson (1958,1973, 1977), through his study of rigidity,motion, and spatial relations, has consis-tently expressed a view of event perceptionthat can, for the most part, be fit snugly intothis model. His approach, however, has beenquite different, and not as formal.
The analysis that follows concerns twotypes of stimuli: One is an 11-light canonicalstimulus used by Cutting (1978a), and theother is an 11-light, spatially anomalouswalker as described in Demonstration 2.Schematic representations of these are shownin Figure 3. Lights on joints are renumberedas compared to Figure 2. Consider first thecanonical walker.
Coding of a Canonical Walker
The movement of the light mounted onthe head, 1, can be completely described asthe movement of the highest order center ofmoment, Cm, with respect to some arbitrarypoint acting as ground, g, plus whatevermovement the head, He, has with respect tothe center of moment. In notational form,1 = M(Cm,g) + M(He, Cm). Since the headdoes not move independently from the centerof moment in my synthesis program, thisequation reduces to: 1 = M(Cm,g).
Parametric description of the other lightsproceeds in a similar fashion. For example,the light mounted on the wrist, 4, is de-scribed by the four vector/center compo-nents of (a) the movement of the center ofmoment of the whole walker with respect tosome arbitrary ground point plus (b) the
movement of the shoulder with respect to thecenter of moment of the whole walker plus(c) the movement of the elbow with respectto the shoulder plus (d) the movement of thewrist with respect to the elbow. Since nearlyall of these motions are phase locked in mysynthesis routine, and in natural gait as well,phase of movement need not be consideredhere but could be incorporated into themodel. This aspect of movement is impor-tant, and I will return to it in my concludingremarks. In addition, it should be noted thatthe center of moment for the whole walkerlies between the shoulders and hips, but thatall body parts move about their own localcenters of moment. In other words, what Iam calling the center of moment for thewalker as a whole is the highest order, ormost deeply nested, center in a system ofcenters. All body parts move in some wayaround this deepest point, but only the elbowand the wrist move about the shoulder, andonly the knee and the ankle move about thehip. Thus, the shoulder and hip are the nextdeepest level of centers of moment. Likewise,the elbows and knees are the next level out-ward in this system of nested movements.What is shown in the upper left corner ofTable 3 is a listing of the system of lightsfor a canonical walker. This is a grammaticalsystem and as in Table 2 can be rewrittenby vector/center substitutions. These areshown in the lower left panel of Table 3, andone graphic representation of these relationsis shown in the lower left panel of Figure 3.This system is precisely that worked out else-where as a tree-structure hierarchy (Cutting& Proffitt, in press, Figure 8).
In this particular version of a coding the-ory, the total possible information load inthis canonical display is: // = 19. Since it isperceived as a human walker, the load isconsiderably reduced, Is = 7. Thus, P =/(19/7) = /(2.71). If considerations suchas phase, wavelength, and plane are added,this value might easily jump to about/(7.6).
Coding of a Spatially Anomalous Walker
In the upper-right panel of Figure 3, theseven points of light that would ordinarilyrepresent the head and the joints of the rightside of the body have been spatially discon-

CODING THEORY AND GAIT PERCEPTION 83
Table 3Vector/Center Analyses for Computer-Generated Stimuli
Canonical walker: /, = 19 Spatially anomalous "walker": /, = 19
234567
= M(Cm,g) H= M(Cm,g) -
= M(Cm,g) -= M(CB
= M(Cn
= M(Cn
= M(C,
„£) ^«*H
«*)H
„£) H
h M(He,Cm) ••
h M(S,CJh M(S,CJ +h M(S,CJ +h M(tfi,CJh M(/W,CJ Hh M(///,Cm) H
= M(Cm,£)
M(£,S)M(£:,S) +
h M(K,Hi)
h M(K,Hi)
M(W,E)
+ M(A,K)
r2'3'4'5'6'7'
= MU,,?) + M(He,i) == M(x,g) + M(S,ii)
= M(*^) H= Wx,g) H
= M(*,g) H
= M(x,g) H
= M(x,g) H
h M(5',h M(5"h M(///h M(//ih M(Hi
Hi) +,iv) +,v)',«/) 4
", vit)
M(x,g)
M(E,S')M(E',S") + 1
• M(K,Hi')
+ M(K',Hi")
Vl(W,E')
+ M(A,K')
Reduced code by vector/centersubstitution: /., = 7,
P =/(///,)
Reduced code by vector/centersubstitution: 1, = 13,
1234567
= M(Cn,g)= 1 + M(S,CJ= 2 + M(£,5)
= 3 + M(W,£)= 1 + M(Hi,Cm)= 5 + M(K,Hi)
= 6 + M(^,/0
r = i2' =3' =4' =5' =6' =7' =
Vf(*,£)
' + M(S,/i)' + M(5',m) + M(£,S')' + M(S",iv) + M(£",5") + M(W,E')
' + M(W/,w)' + M(Hi',vi) + M(K,Hi')' + M(Hi",vii) + M(K',Hi") + M(A,K')
Note. M = movement of point following it; Cm = highest order center of moment; He = head; S = shoulder; E= elbow; W = wrist; Hi = hip; K — knee; A — ankle, g is an arbitrary ground point. Arabic numbers refer tomovements of lights shown in Figure 3; lowercase italicized Roman numerals refer to arbitrary, unrelated pointsin space, as shown in the upper right panel of Figure 3. Primed values of joints indicate that the locations aredifferent for each occurrence of a particular joint. In the general form of the notation, M(x,y), I am consideringthe movement of point x with respect to point y, a mechanically determinable point based on the vector structureof x. I, = total number of vector/center doubles needed to specify the lights independently; I, = total number ofvector/center doubles needed to specify the lights as a coherent system. P is the prominence of the perceivedconfiguration, as a function (/) of /, divided by I,.
nected. In the demonstration, these (and thelights mounted on the left side of the body)all move across the screen. They share thecommon vector of motion that correspondsin the canonical walker to M(Cm,g). Thistime, however, since the array is spatiallydisorganized, there is no determinable high-est order center of moment. Thus, lightsshare an undulatory translation vector ofsome unknown point x, and the vector move-ment can only be described as M(x,g), themovement of this unknown point with re-spect to some arbitrary ground point g. Thisvector is shared by all seven points, but noth-ing else is shared. In particular, although theseven points labeled / and VH are the samepoint in the canonical walker, they bear nosystematic relation to one another here.
Thus, they cannot form the basis of a nestingscheme. In the vector/center substitutioncarried out in the lower-right section of Ta-ble 3, the movement of Light 2', for example,cannot be substituted into the movement ofLight 3' because the local centers of momentfor the two are not shared, one being pointii and the other being point Hi. The samenonsubstitutability holds for Lights 3' and4', 5' and 6', and 6' and 7'. Thus, the gram-mar for this spatially anomalous walker isentirely different, conceptually shown in thelower right panel of Figure 3. This is to becompared against that for the canonicalwalker in the lower-left panel of the samefigure.
This adaptation of coding theory suggeststhat the total possible information load of

84 JAMES E. CUTTING
this display is the same as the canonicalwalker: /, = 19. However, vector-center sub-stitutions allow the reduction of this param-eter load, /, = 13. Thus, P =/(19/13) = 13.Thus, P =y(19/13) = /(I-46). If consider-ations of phase, wavelength, and plane areadded, this value jumps to about /(4.15).
Given these values for the two walkers,two facts become important. First, computedprominence for the spatially anomalouswalker is considerably below that for thecanonical walker. This suggests that the ca-nonical figure is a much better one—as in-deed the demonstration indirectly suggested.Second, the previous version of my codingmodel does not discriminate between the twotypes of walkers. Both would have promi-nence values of /(2.71) by my conservativemethod of calculation and near f(7.6) byconsidering the other shared parameters.
In addition, although codes get slightlymore complex, prominence values for on-and off-joint stimuli used in Experiment 1remain the same. Thus, this second modelincludes the first as a special case. Moreover,the second model should be applicable toevents other than walking and should beuseful as a descriptive and predictive device.
Discussion
This adaptation of a coding theory toevent perception was motivated by an at-tempt to make mutually comparable Restle's(1979) formal model and my colleagues andmy less formal account of centers of mo-ment. I have preserved Johansson's (1973)vector-analytic approach in part becauseRestle's five movement parameters do notdistinguish circular motion from pendularmotion, or any other type of movement.Thus, instead of parameters I have usedcomplex vectors as primitives within the cod-ing system. This has a certain degree ofinelegance, but when dealing with biologicalmovements, a microanalysis of complex vec-tors seems not only overwhelmingly compli-cated, but also only tangentially relevant.
Perception and Coding
The major thrust of this article is to sug-gest that both movements and spatial rela-
tions are necessary to any formal account ofevent perception and that these must inter-act. In particular, the coding of nested mo-tions of various parts of a dynamic figuremust include the coding of points from whichthe motions are generated. More concretely,a coding model, regardless of its form,should be able to account for the two typesof results suggested in this article: It mustprovide a rationale for why on-joint repre-sentations of human walkers are better thanoff-joints representations and why a canon-ical display of a walker is much better thana spatially anomalous one.
My second model does this in the follow-ing way: Consider first the on-joint and off-joint stimuli. Both of these displays have ahighest order center of moment. The locationof this point lies roughly midway betweenthe shoulder and the hip. Only the on-jointdisplay, however, has a nested hierarchy ofsuch centers, with the shoulder and hip serv-ing as local centers of moment for the wristand ankle, respectively. This nesting pro-vides a simple and straightforward means ofvectorial decomposition to find the highestorder center of moment of the display. Themethod outlined later proceeds in an ordersuggested by Wallach (1965) and is oppositeto that suggested by Johansson (1973). (SeeCutting & Proffitt, in press, Proffitt & Cut-ting, 1979, and Proffitt et al., 1979, for therationale of the ordering.)
One possible plan for perceiving an on-joint stimulus is as follows: First, the move-ments of the wrist and shoulder are com-pared, and by subtracting out the relativevector, one obtains redundant and more sa-lient information about the movement of theshoulder. Likewise, comparing the move-ments of the ankle and hip and subtractingout the relative vector, one obtains redun-dant and more salient information about themovement of the hip. Finally, comparing theresidual common vectors for all four lightsmounted on the right side of the body, to-gether with those of the wrist and ankle onthe left side and with that of the head, thelocus and movement of the highest ordercenter of moment fall out as residuals. Inour analysis, the locus and movement of thispoint are strongly correlated informationthat can be used to make accurate gender

CODING THEORY AND GAIT PERCEPTION 85
judgments (Cutting, 1978a; Cutting et al.,1978). Thus, it makes a certain amount ofsense that the on-joint figures, and by ex-tension the canonical ones, should makegood figures with high prominence values,allowing gender identification.
The off-joint display, on the other hand,provides a not-so-simple and not-so-straight-forward vector decomposition. Comparingthe movements of a light mounted on theright biceps and right forearm does not pro-vide redundant information about a visiblepoint in the display. Instead, that point is aninvisible one, the shoulder. Likewise, com-paring the movements of lights mounted onthe thigh and calf have redundancy for theunseen hip. Amalgamating the residualmovements from all of the points around thebody leaves the perceptual system with thetask of deriving to locus and movement ofan unseen point (the highest order center ofmoment) from the locus and movements oftwo other unseen points (the shoulder andhip, which are more local centers of mo-ment). Conceptually, this seems like a moredifficult task and to the extent that this logicreflects what the perceptual system is doing,it makes sense that gender judgments shouldbe more difficult in this case. In fact, withno experience, viewers in Group 3 of Ex-periment 1 could not perform the task at all,but with a few minutes experience, those inthe other groups could judge gender mod-erately well, though never as well as fromon-joint or canonical displays.
The accounts for the difference in percep-tion between the canonical and anomalousdisplays proceed in a similar fashion. Thelogic for the canonical display is simply anextension and elaboration of that for the on-joint stimulus given earlier, so it need not berepeated here. The logic for anomalous dis-play is as follows: It makes little sense thatlimbs of the human body should be isolated,since viewers did not report seeing a hu-manlike structure in the display. Thus, per-ception would probably follow somethinglike an adjacency principle (Gogel, 1978).For any pairwise comparison of lights, therelative vector would subtract out, since allresidual motion would be the same. How-ever, all residuals would leave the perceptualsystem with no consistent center of moment
for the display as a whole. The fact that thereis no center of moment may have contributedto the perception of this conflation of lightsby some viewers as not a single entity buta swarm of closely related entities. The dis-play obviously had coherence, since all pointsshared a phase-locked undulatory vectoracross the screen, but there was no centralstructure in that coherence. Thus, the lightshad a common fate but no nested commonfate about a common center. The nestingshown in the lower right-hand panel of Fig-ure 3 is, I would argue, precisely the nestingthat is necessary for the specification of ahuman figure.
Dynamics, Kinetics, and Kinematics
The study of mechanics divides severalways, and this parsing seems likely to berelevant to the perception of events. First,statics is contrasted with dynamics. Statics,on the one hand, deals with unmoving bodiesand the equilibrium of forces, and dynamics,on the other hand, deals with moving bodiesand with the action offerees that move them.Dynamics is subdivided because the treat-ment of moving bodies in themselves is calledkinematics, whereas the treatment of mov-ing bodies as a result of forces played onthem is called kinetics.
These distinctions are important becausethe coding theory approaches used here andin Restle (1979) are both kinematic. Thatis, neither refers in any overt manner to theforces that generate motion—both are stud-ies in pure movement. I would expect, how-ever, that the approach used here will proveconsistent with a kinetic approach. The rea-son for this assertion is that it seems to methat the concept of centers of moment isneutral with respect to the distinction withindynamics. Thus, centers of moment shouldprove equally applicable to kinematics andkinetics. I would expect further that kineticapproaches to event perception will provesuperior to kinematic ones (see Runeson &Frykholm, in press). After all, forces aredetermined by mass times acceleration.When perceiving gait, for example, we per-ceive the movements of torso, arms, and legs,each of which have accustomed masses andwhich accelerate according to known laws.

86 JAMES E. CUTTING
These movements are locked in time to thesemasses and forces. To change artifically therelative speed of a walker, as done by Bar-clay, Cutting, and Kozlowski (1978, Exper-iment 2) is to disrupt the whole kineticprocess, leaving the kinematic descriptionintact. Since such changes in presentationrate disrupt gait perception, it is likely thata kinetic approach to gait, and by extensionto other events, will prove more efficacious.
Some Caveats
There are several other crucial compo-nents of motion not formally considered inmy system. In particular, phase and theplane in which the movement takes place areomitted here but included by Restle (1979).These are serious omissions in my formu-lation. Consider each in turn.
Phase is extremely important in all bio-logical motion. Phase is precisely what sep-arates walking from running in bipedal lo-comotion and walking, pacing, trotting, andgalloping in quadrupedal gait. Moreover,slight asynchronies in phase are alreadypresent in my synthetic walker program(Cutting, 1978c), which I have not dis-cussed. In particular, the movement of theankle with respect to the knee is not quitein phase, and to place them artificially inphase is to create an unnatural looking gait,one of toe stubs occurring with each step.
The plane in which movement takes placeis also crucial. Although assuming a singleplane for walker movement is a useful sim-plification, it ignores the potential richnesspossible in human biomechanics. In partic-ular, my notation would be inadequate fordancing or for sign language precisely be-cause in those domains many planes areused. In fact, my system, like Restle's (1979),ignores the fundamental three-dimensional-ity of space and some of the richness offeredby Johansson's (1977) analyses of projectivegeometry.
Phase and planar considerations could beadded to this notation system but at the ex-pense of clarity and simplicity. Thus, I havenot attempted to add them here. Instead, theforce of my presentation is that mechanicalmovements in a nested system are not onlyvectorally coherent but also spatially coher-
ent around movement centers. That is, move-ments are generated from specific places,like the joints of a walker, and these nestedcenters of moment are crucial to this typeof event perception.
Reference Note
1. Johansson, G. Visual perception of biological motionand a model analysis (Report 100). Uppsala, Swe-den: University of Uppsala, Department of Psychol-ogy, 1971.
References
Barclay, C. D., Cutting, J. E., & Kozlowski, L. T. Tem-poral and spatial factors in gait perception that in-fluence gender recognition. Perception & Psycho-physics, 1978, 23, 145-152.
Cutting, J. E. Generation of synthetic male and femalewalkers through manipulation of a biomechanical in-variant. Perception, 1978, 7, 393-405. (a)
Cutting J. E. Perceiving the geometry of age in a humanface. Perception & Psychophysics, 1978, 24, 566-568. (b)
Cutting, J. E. A program to generate synthetic walkersas dynamic point-light displays. Behavior ResearchMethods & Instrumentation, 1978, 10, 91-94. (c)
Cutting, J. E., & Kozlowski, L. T. Recognizing friendsby their walk: Gait perception without familiaritycues. Bulletin of the Psychonomic Society, 1977, 9,353-356.
Cutting, J. E., & Proffitt, D. R. Gait perception as anexample of how we may perceive events. In H. L. Pick& R. Walk (Eds.), Perception and perceptual devel-opment (Vol. 2). New York: Plenum Press, in press.
Cutting, J. E., Proffitt, D. R., & Kozlowski, L. T. Abiomechanical invariant for gait perception. Journalof Experimental Psychology: Human Perception andPerformance, 1978, 4, 356-372.
Gogel, W. C. The adjacency principle in visual percep-tion. Scientific American, 1978, 238(5), 126-138.
Johansson, G. Configurations in event perception, Upp-sala, Sweden: Almquist & Wiksell, 1950.
Johansson, G. Rigidity, stability, and motion in percep-tual space. Acta Psychologica, 1958, 14, 359-370.
Johansson, G. Visual perception of biological motionand a model for its analysis. Perception & Psycho-physics, 1973, 14, 201-211.
Johansson, G. Visual motion perception. ScientificAmerican, 1975, 232(6), 76-89.
Johansson, G. Spatial constancy and motion is visualperception. In W. Epstein (Ed.), Stability and con-stancy in visual perception. New York: Wiley, 1977.
Johansson, G., von Hofsten, C., & Jansson, G. Eventperception. Annual Review of Psychology, 1980, 31,27-63.
Johnson-Laird, P. H., & Wason, P. C. (Eds.), Thinking:Readings in cognitive science. Cambridge, England:Cambridge University Press, 1977.
Kozlowski, L. T., & Cutting, J. E. Recognizing the sexof a walker from a dynamic point-light display. Per-ception & Psychophysics, 1977, 21, 575-580.
CODING THEORY AND GAIT PERCEPTION 87
Leeuwenberg, E. L. J. A perceptual coding language forvisual and auditory patterns. American Journal ofPsychology, 1971, 84, 307-349.
Leeuwenberg, E. L. J. Quantification of certain visualpattern similarities: Salience, transparency, similar-ity. In E. L. J. Leeuwenberg & H. F. J. M. Buffart(Eds.), Formal theories of visual perception. NewYork: Wiley, 1978.
Marey, E. J. Movement. New York: Arno Press & NewYork Times, 1972. (Originally published, 1895.)
Murray, M. P. Gait as a total pattern of movement.American Journal of Physical Medicine, 1967, 46,290-333.
Proffitt, D. R., & Cutting, J. E. Perceiving the centroidof configurations on a rolling wheel. Perception &Psychophysics, 1979, 25, 389-398.
Proffitt, D. R., Cutting, J. E., & Stier, D. M. Perceptionof wheel-generated motions. Journal of ExperimentalPsychology: Human Perception and Performance,1979, 5, 289-302.
Restle, F. Coding theory of the perception of motionconfigurations. Psychological Review, 1919,86,1-24.
Runeson, S. & Frykholm, G. Visual perception of liftedweight. Journal of Experimental Psychology: Hu-man Perception and Performance, in press.
Sober, E. Simplicity. New York: Oxford UniversityPress, 1975.
Wallach, H. Visual perception of motion. In G. Kepes(Ed.), The nature and art of motion. New York:George Braziller, 1965.
Received August 2, 1979 •
Instructions to Authors
For further information on content, authors should refer to the editorial in the August1978 issue of the Journal (Vol. 5, No. 3, pp. 355-356). Authors should prepare manuscriptsaccording to the Publication Manual of the American Psychological Association (2nd ed.).Instructions on tables, figures, references, metrics, and typing (all copy must be double-spaced) appear in the Manual. Manuscripts should include an abstract of 100-175 words.Authors are requested to refer to the "Guidelines for Nonsexist Language in APA Journals"(Publication Manual Change Sheet 2, American Psychologist, June 1977, pp. 487-494)before submitting manuscripts to this journal.
Authors should submit manuscripts in quadruplicate, and all copies should be clear, read-able, and on paper of good quality. Authors should keep a copy of their manuscript to guardagainst loss. Mail manuscripts to the Acting Editor, Margaret Jean Intons-Peterson, De-partment of Psychology, Indiana University, Bloomington, Indiana 47405.
Addresses for the editors of the other JEP journals are as follows: Journal of ExperimentalPsychology: General, Gregory A. Kimble, Department of Psychology, Duke University, Dur-ham, North Carolina 27706 (submit 4 copies of the manuscript); Journal of ExperimentalPsychology: Human Learning and Memory, Richard M. Shiffrin, Department of Psychology,Indiana University, Bloomington, Indiana 47405 (submit 4 copies of the manuscript); andJournal of Experimental Psychology: Animal Behavior Processes, Allan R. Wagner, De-partment of Psychology, Yale University, New Haven, Connecticut 06520 (submit 3 copiesof the manuscript).
The editors have agreed to use blind review when it is requested by the author. Authorsrequesting blind review should prepare manuscripts to conceal their identity.




![Tutorial - aipo.es · Part 1: Coding Key Experiential Moments Step 1: Building on the van Kaam coding method [9] that Moustakas adapted, [10] ...](https://static.fdocuments.in/doc/165x107/5b151f9b7f8b9a8f548dccd2/tutorial-aipoes-part-1-coding-key-experiential-moments-step-1-building.jpg)