Biogeochemical Cycles All matter cycles…and all cycles matter!
Upload
carmen-perezCategory
view
212download
0
Systems & Control Letters 60 (2011) 658–664
Contents lists available at ScienceDirect
Systems & Control Letters
journal homepage: www.elsevier.com/locate/sysconle
Closed curve solutions and limit cycles in a class of second-order switchednonlinear systemsCarmen Pérez ∗, Francisco BenítezDepartment of Mathematics, University of Cádiz, Puerto Real, Cádiz, 11510, Spain
a r t i c l e i n f o
Article history:Received 22 September 2009Received in revised form4 May 2011Accepted 4 May 2011Available online 2 June 2011
Keywords:Closed curve solutionsLimit cyclesSwitched convergent state setSwitched nonlinear systems
a b s t r a c t
This paper studies the problem of finding the initial states for which the solution of a class of switchedsystems consisting of unstable second-order nonlinear subsystems is convergent. A method is describedand applied to establish the regions in the plane where it is possible to define a switching law such thatthe solution of a class of switched nonlinear systems converges to the origin.We prove that, under certainconditions, these regions are delimited by closed curve solutions of the switched system. Furthermore,a sufficient condition for the closed curve solution to be a limit cycle is presented. Finally, a numericalexample is included in order to illustrate the results.
© 2011 Elsevier B.V. All rights reserved.
1. Introduction
A switched system is a kind of hybrid system that consistsof several subsystems and a switching law determining whichsubsystem is active at any time instant. In recent years, the studyof switched systems has received growing attention in ControlTheory and its applications [1–3]. They have been studied fromseveral points of view such as the controllability [3], reachability[4,5] or stability.
Recently, many results have appeared on the stability analysisof switched systems for any switching law. The main approachtries to guarantee that the switched system is asymptotically stablefor any switching law, and it consists of finding conditions underwhich there is a common Lyapunov function for the family ofsubsystems. In [1,6–10] or [11], conditions that prove the existenceof a common Lyapunov function are introduced and results for thestability of a switched system are established. One of the mainresults is obtained in [7] where it is shown that the switched linearsystem is exponentially stable for arbitrary switching law if the Liealgebra generated by the subsystems is solvable.
Another important issue is the stabilization, i.e. given a familyof subsystems, whether it is possible to find a switching lawthat renders the switched system asymptotically stable. Suchstabilizing switching laws may exist even in the extreme situationwhere all the individual subsystems are unstable. Examples [2]
∗ Corresponding author. Tel.: +34 956016745.E-mail addresses: [email protected] (C. Pérez), [email protected]
(F. Benítez).
0167-6911/$ – see front matter© 2011 Elsevier B.V. All rights reserved.doi:10.1016/j.sysconle.2011.05.003
and conditions that guarantee the existence of a stabilizingswitching law [12,13] or [14]. In [15], it is solved the problem ofstabilizing switched systems consisting of unstable second-orderlinear subsystems.
Once the conditions for the stabilization are established, thenext problem is finding the switched convergent states, i.e. theinitial conditions for which there is a switching law such thatthe solution of the switched system converges to the origin.In [16], it is proved the local stabilization of a class of switchednonlinear systems. Therefore, Hu et al. find a neighborhood ofthe origin that is contained in the switched convergent states. Inthis paper, the switched convergent state set (the set consisting ofswitched convergent states) for a switched nonlinear system classis obtained. Moreover, it is proved that, under several conditions,this set is delimited by a closed curve solution of the switchedsystem.
A concept related to the closed curve solution is the limitcycle. In this paper, an additional result is included to prove thatthe aforementioned closed curve solution is a limit cycle of theswitched system. Inworks such as [17,18] the invariance principlesfor hybrid or switched systems are studied in a general form.
The remainder of this paper is organized as follows. Section 2contains some preliminaries and definitions. The stabilizationmethod for nonlinear switched systems employed in this paper ispresented in Section 3. In Section 4, a new result for the existenceof a closed curve solution for a switched nonlinear system class ispresented. Section 5 deals with the application of this result to findthe stabilizable state set for this switched system class. In Section 6we provide the condition for the existence of a limit cycle. Finally,in Section 7 an illustrative example is included and the conclusionsare in Section 8.

C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664 659
2. Preliminaries
Consider a switched nonlinear system
x(t) = fσ(t)(x(t)) (1)
where fi : D → R2, i = 1, 2, is a vector field of class C1 in theopen and connected set D, x ∈ R2, and σ : [0,∞) −→ 1, 2 is apiecewise constant function called switching law. Such a functionσ has a finite number of discontinuities, which we call switchingtimes, on every bounded time interval and takes a constant valueon every interval between two consecutive switching times. Therole of σ is to indicate the active subsystem at each time instant t .
Throughout the paper, we use ⟨·, ·⟩ and ‖·‖ to denote the stan-dard inner product and Euclidean norm, respectively. Moreover,for a vector field f of class C1, γ will denote the flow of f , i.e., forx0 ∈ D, γ (x0) is the solution of the initial value problem x =
f (x), x(0) = x0. In particular, for the subsystems that define theswitched system (1), we use γ 1 and γ 2 to denote the flow of f1 andf2, respectively.
Definition 1. Given an initial state x0 ∈ R2 and a switching law σthe solution x of the switched system (1) for each t > 0 is given by
x(t) = γiMt−tM−1
· · · γi2t2−t1 γ
i1t1 (x0)
where t1, t2, . . . , tM−1 are the switching times of σ in the interval[0, t) and if s ∈ [tk−1, tk), σ(s) = ik, for ik ∈ 1, 2, ik = ik+1, andk = 1, . . . ,M − 1.
In this paper, we suppose that the origin is an unstable equilibriumpoint of each subsystem, f1 and f2. Therefore, the terms stabilityof the switched system or stabilizable state are related to theequilibrium point of the subsystems. However, in this work, weuse a weaker property than the classical notion of stabilizability.This property was defined for the first time by Sun and Ge [19]for switched linear systems. Now, we extend this definition to thenonlinear case.
Definition 2. A state x0 ∈ R2 is switched convergent if thereis a switching law σ , such that the state trajectory initialized atx(0) = x0 converges to the origin, that is, limt→+∞ x(t) = 0.
It is important to note that the results in this paper are alsoavailable for an equilibrium point different from the origin byconsidering a change of variables. In particular, for this definition,the condition would be limt→∞ x(t) = xe where xe is theequilibrium point.
If the set of all switched convergent states of the system (1) isdenoted by S, the definition of switched convergent system can bepresented as follows:
Definition 3. The switchednonlinear system (1) is locally switchedconvergent if there exists a neighborhood U of the origin such that
U ⊂ S.
The method for finding the switched convergent states isintroduced in [15] for the linear case. Namely, the criteria used fordecidingwhich subsystem is active at each instant are based on thefollowing inner products. Firstly, ⟨x∗, fi(x)⟩ indicates the directionof the subsystem i at x, where i = 1, 2 and x∗ is the vector obtainedby rotating x clockwise by an angle π
2 . Therefore, if ⟨x∗, fi(x)⟩ > 0(resp. < 0), the subsystem i is said to be of clockwise (resp. ofcounterclockwise) direction at x. Secondly, F(x) = ⟨(f2(x))∗, f1(x)⟩indicates which subsystem is the most suitable at x, i.e., the setgiven byΩ = x : F(x) = 0 determines the switches.
In the linear case, this set is given by two rays that go throughthe origin. In the nonlinear case, if we suppose that the Hessian
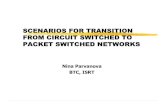
Fig. 1. Several figures forΩ in a neighborhood of the origin.
uC1
C2
C3
C4
S1
S2
S3
S4
Fig. 2. The set U, the connected components Si , and the curves Ci for i = 1, 2, 3, 4.
matrix of F at the origin, HF (0), satisfies that det(HF (0)) < 0, then,by Morse’s lemma (see, e.g., [20]), in a neighborhood of the originthe set Ω is given by two curves that go through the origin (seeFig. 1).
Moreover, the tangent lines to these curves at the origin aregiven by the following expression
⟨(A2x)∗, A1x⟩ = 0
where Ai = Dfi(0) for i = 1, 2. As a result, in a neighborhood ofthe origin, it is possible to define a parameterization for each curvethat satisfies the conditions in the following definition.
Definition 4. Let C be a parametrizable curve in R2. A parameter-ization of this curve, ϕ : [0, 1] −→ R2, is said to be increasingif the real function ϕ : [0, 1] −→ R, where ϕ(λ) = ‖ϕ(λ)‖, isincreasing.
Thus, there is an open and connected setU that contains the originsuch that4
i=1
Ci = 0 Ω ∩ U =
4i=1
Ci
where Ci is a curve that goes through the origin and has anincreasing parameterization. Furthermore, note thatU\Ω is givenby four connected components, each of them satisfying F(x) > 0or F(x) < 0.
Notation. Si, for i = 1, 2, 3, 4, are the connected components ofU \ Ω . These sets are enumerated in clockwise order. Also, wesuppose that F(x) > 0 if x ∈ S1. Therefore, F(x) > 0 if x ∈ S1 ∪ S3and F(x) < 0 if x ∈ S2 ∪ S4.
Moreover, we suppose that C1 is the curve that separates S4 fromS1 and Ci is the curve that separates Si−1 from Si for i = 2, 3, 4 (seeFig. 2).
Definition 5. A switched nonlinear system (1) is clockwise rotated(CRS) if for some initial condition x0 ∈ U there exist a switchinglaw σ and an increasing non-negative sequence (hn)n∈N, hn → ∞,such that the solution x of (1) under this switching law satisfiesthat

660 C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664
u u
C1
C1C2
C2
C3
C3C4
C4
x0x0
S1
S1
S2
S2
S3
S3S4
S4
a b
Fig. 3. (a) Trajectory of a clockwise rotated switched system. (b) Trajectory of acounterclockwise rotated switched system.
– x(h4i+j) ∈ Cj for i = 0, 1, 2, . . . and j = 1, 2, 3, 4.– x(t) ∈ Sj if t ∈ (h4i+j, h4i+j+1) for i = 0, 1, 2, . . . and j =
1, 2, 3, 4.
If the solution given by x(−t) satisfies the previous condition wewill say that the switched nonlinear system (1) is counterclockwiserotated (CCRS).
The initial conditions x0 ∈ U for which the switched systemis rotated are called rotating states and the switching laws underwhich the switched system is rotated are called rotating switchinglaws.
Remark 1. Intuitively, when a switched system is clockwise (orcounterclockwise) rotated there exist switching laws under whichthe trajectory of the solution rotates clockwise (or counterclock-wise) around the origin (see Fig. 3 (a) and (b)). This does not implythat the trajectories given by the subsystems f1 and f2 satisfy thesame property.Typical examples of CRS or CCRS systems include switched linearsystems given by two matrices with complex eigenvalues whosetrajectories are of the same direction. In particular, the harmonicoscillator stabilized by a hybrid static output feedback (see [21]or [22]). Also, in the nonlinear case, examples of such systemscan be found in the switched systems given by two predator–preymodels (Volterra–Lotka equations). Moreover, in this paper wepresent an example of a CRS nonlinear system in order to illustratethe obtained results.
3. Switched convergence of the rotated switched systems
In this section, we present one method for studying theswitched convergence of rotated switched nonlinear systems andsome results employed to prove that the method works.
Suppose that the switched system (1) is clockwise rotated.Before giving the most suitable choice to assure that this systemconverges to the origin we prove the following result.
Lemma 1. Let (1) be a switched system and x0 ∈ S1. Consider fori = 1, 2 the trajectory Ti of fi starting at x0. Suppose that Ti intersectsC2 at xi for the first time for i = 1, 2 and the trajectory correspondingto −f2 starting at x0 intersects the curve C1 at a point M for the firsttime. Then, ‖x1‖ < ‖x2‖.
Proof. By the Jordan Curve Theorem (see, e.g., [23]) applied to theunion of the curves: T2, the arc [x2, 0] of C2, and the arc [0,M] ofC1, there exist two regions that are open, connected, disjoint, andwhose union is the complementary set of the union of the curves.Let us R1 denote the bounded region delimited by the consideredcurves. Since the trajectory T2 of f2 goes from C1 to C2 the closedcurve is negatively oriented, i.e., it has the bounded set R1 to theright. Therefore, the trajectory T1 goes into R1 (see Fig. 4) because
uC1
C2
MS1
x0
x1 x2
Fig. 4. The curves C1 and C2 and the trajectories for each subsystem in Lemma 1.
⟨(f2(x0))∗, f1(x0)⟩ > 0. Moreover, this trajectory cannot leave R1since, if not, we could find x ∈ R1 such that ⟨(f2(x))∗, f1(x)⟩ ≤ 0.Thus, x1 must be on the arc [0, x2]. Since the parameterization ofC2 is increasing, we conclude that ‖x1‖ < ‖x2‖.
Hence, the definition of the ‘‘most convergent’’ switching lawcan be deduced from the previous lemma:
Switching law I If the switched system is clockwise rotated, f1is chosen in S1 and S3 and f2, in S2 and S4. If the switched system iscounterclockwise rotated f1 is chosen in S2 and S4 and f2, in S1 andS3.
Next, we formalize the method.
Theorem 1. Consider the switched system (1) consisting of twovector fieldswhere the origin is an unstable equilibriumpoint. Supposethat the switched system is clockwise (or counterclockwise) rotated. Ifx0 ∈ U is switched convergent in U under a rotating switching lawthen x0 is switched convergent under switching law I.
Proof. We only prove the theorem when the system is clockwiserotated (the proof is essentially the same for the counterclockwisecase).
Let σ1 be the rotating switching law under which x0 is switchedconvergent and let σ be switching law I. We denote by Γ and Γ 1
the solutions of the switched system under σ and σ1, respectively.We can suppose, without loss of generality, that x0 ∈ C1. Let T1
be the first switching time of σ and σ(0) = 1.As σ1 is a rotating switching law, by Definition 5, there exists
h2 > 0 such that Γ 1(h2) ∈ C2 and Γ 1(t) ∈ S1 if t ∈ (0, h2).Suppose that 2n − 1 is the number of switching times in (0, h2)and t1, t2, . . . , t2n−1 is the switching time sequence of σ1 such that
σ1(t2k) = 1σ1(t2k+1) = 2
for k = 0, 1, 2, . . . , n−1 and t0 = 0. By the definition of switchinglaw I, in this region ⟨(f2(x))∗, f1(x)⟩ > 0 is satisfied. Thus, byapplying Lemma 1, we obtain that [Γ 1(t1),Γ 1(t2)] is outside theregion bounded by the closed curve union of Γ (t) : t ∈ (0, T1),C1, and C2 (see Fig. 5).
Moreover, the pieces of Γ 1 corresponding to f1 cannot intersectΓ for t ∈ (t1, h2] since Γ is given by the first subsystem. In thesame way, the pieces of Γ 1 corresponding to f2 cannot intersect Γbecause ⟨(f2(x))∗, f1(x)⟩ > 0 in this region.
Similarly, for each switching interval [Tn, Tn+1] of σ , the curvegiven by Γ is inside of the region delimited by the union of an arcof the solution Γ 1 and the arcs of Ω . Thus, if Γ 1 converges to theorigin, Γ also converges to the origin.
4. Existence of a closed curve solution
Given the rotated switched system (1) we define the inverseswitched system as

C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664 661
x0
C1
C2o
Γ(T1)
Γ1(t3)
Γ1(t2)Γ1(t1)
Γ1(h2)
Fig. 5. The solutions of the switched system under each switching law σ and σ1 inthe proof of Theorem 1.
x(t) = −fσ(t)(x(t)) (2)
where the switching law is defined by using the criteria of theswitching law I in the following form: in the regions where fi ischosen under the switching law I, in this switched system −fi isemployed, where i = 1, 2.
Suppose that x0 ∈ Ci, for some i = 1, 2, 3, 4, is an initialcondition of the rotated switched system (1) under switching law I.If the solution of this system intersects Ci at x0 after three switches,then the solution of its inverse switched system that starts at x0and the previous solution define the same curve. That is, the twosolutions are two different parameterizations of such curve.
The following lemma is necessary for proving themain result inthis section.
Lemma 2. Let f be a vector field of classC1 in the open and connectedset D and γ its flow. Let C and C be two connected curves in R2
that have an increasing parameterization. Suppose that there existsa correspondence between C and C that assigns to each x0 ∈ C thepoint x′
0 = ψ(x0) ∈ C where the trajectory of f intersects C for thefirst time. If C is a closed set in R2, then ψ is a continuous function.
Proof. Firstly, we will prove that ψ is a function. We define thefunction β : C → R by β(x) = mint > 0 : γt(x) ∈ C. Let usprove thatβ iswell-defined. By hypothesis, the set t > 0 : γt(x) ∈
C is nonempty for each x ∈ C . Moreover, there always exists theminimum. Suppose not, i.e., there exists x ∈ C such that t > 0 :
γt(x) ∈ C has no minimum. Then, there exists a sequence (tn)n∈Nin this set such that converges to t0 = inft > 0 : γt(x) ∈ C
and γt0(x) ∈ C . Thus, the sequence γtn(x) in C converges to γt0(x),which is a contradiction since γt0(x) ∈ C and C is closed.
Therefore, it is clear that the function ψ : C −→ C will bedefined asψ(x) = γβ(x)(x). Hence, we only have to prove thatψ iscontinuous in C .
Let x0 ∈ C and ε > 0. We will prove that ψ is continuousat x0. First, we consider an arc [A, B] of C that contains x0. Bydefinition of ψ we have that ψ([A, B]) is contained in an arc of C ,ψ([A, B]) ⊂ [A′, B′
].Next, we denote ψ(x0) by x′
0 and by x′
1 the point in C thatsatisfies ‖x′
0 −x′
1‖ = min‖x′
0 −A′‖, ε and ‖x′
1‖ < ‖x′
0‖. Similarly,we denote by x′
2 the point in C that satisfies ‖x′
0−x′
2‖ = min‖x′
0−
B′‖, ε and ‖x′
2‖ > ‖x′
0‖. Then the arc of C given by [x′
1, x′
2] satisfiesthat for all x′
∈ [x′
1, x′
2] the trajectory given by −f intersects thecurve C . Particularly, we have xi = γ−ti(x
′
i) for some ti > 0, i = 1, 2(see Fig. 6).
Therefore, if δ = min‖x1 − x0‖, ‖x2 − x0‖, then for all x ∈
B(x0, δ) ∩ C the trajectory of f intersects the arc [x′
1, x′
2] by theproperties of the trajectory of a system, i.e.,ψ(x) ∈ [x′
1, x′
2]. Hence,‖ψ(x)− ψ(x0)‖ < ε if ‖x − x0‖ < δ.
Fig. 6. The curves C and C and the trajectories of the vector field f .
Theorem 2. For the switched system (1), suppose that there exist x1,x2 ∈ C1 that satisfy the following conditions1. There exists an increasing parametrization φ : [0, 1] −→ C1 such
that φ(0) = x1, φ(1) = x2.2. If we denote by x
i , i = 1, 2, the point where the solution of (2),that starts at xi for i = 1, 2, intersects the curve C1 for the firsttime, these points satisfy ‖x1‖ < ‖x
1‖ and ‖x
2‖ < ‖x2‖.Then, under these conditions, there exists x0 ∈ φ([0, 1]) such that thesolution of (1) under switching law I that starts at x0 is a closed curve.
Remark 2. It is important to note that the theorem is also valid forthe curves Ci for i = 2, 3, 4.
Proof. Firstly, we define a function χ : [0, 1] → [0, 1] such thatfor each λ ∈ [0, 1], χ(λ) = φ−1(x) where x is the point wherethe solution of (2) intersects the curve φ([0, 1]) for the first timeafter leaving φ(λ). The existence of x is assured by the definitionof the rotated switched system. Moreover, by definition of theswitching law I, we can deduce that the solution of (2) is given bythe subsystem f1 or f2 in each Si for i = 1, 2, 3, 4. Therefore, thissolution cannot intersect the solutions of the same system for x1and x2, respectively. Hence, the state x is in the arc [x
1, x
2] of C1.Therefore, we can deduce the following properties:
– χ is well-defined. The function φ−1 exists because φ is anincreasing parameterization and, by the previous arguments, xalways exists and is unique.
– χ(0) > 0 and χ(1) < 1. Firstly, φ(0) = x1 and φ(χ(0)) = x
1.Since, by condition (2), ‖x1‖ < ‖x
1‖ and φ is increasing, it isclear that 0 < χ(0). The same argument can be used to provethat χ(1) < 1.
– χ is continuous because it is the composition of continuousfunctions,
χ = φ−1 ψ4 ψ3 ψ2 ψ1 φ
where ψi are the functions obtained by applying Lemma 2 tothe subsystems used in the three switches (the curves C and Care given byΩ), and φ is the parametrization given previously.
Consequently, Banach’s fixed point theorem can be applied to thefunction χ . Thus, there exists λ0 ∈ (0, 1) such that χ(λ0) = λ0.Hence, by definition of χ ,
λ0 = χ(λ0) = φ−1 ψ4 ψ3 ψ2 ψ1 φ(λ0);
i.e., if we denote the point φ(λ0) by x0,
x0 = ψ4 ψ3 ψ2 ψ1(x0).
Thus, there exists a closed curve solution of (1) under switchinglaw I.
5. Switched convergent state set
The purpose of this section is to prove that the closed curvesolution obtained in Theorem 2 delimits the switched convergentstate set of (1).

662 C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664
Firstly, we pick ϕ1([0, 1]) where ϕ1 is the parameterization ofC1 (see definition in Section 2).
Definition 6. Given the switched system (1) and switching law I,P will denote the set of initial conditions x0 ∈ ϕ1([0, 1]) such thatthe solution of (1) under switching law I that starts at x0 is a closedcurve.
Note that if P is not empty, then ϕi([0, 1]), for i = 2, 3, 4 alsocontains initial conditions such that the solution of the systemunder the switching law I is closed. Thus, the definitions and resultscan be extended to the curves C2, C3, and C4.
The following lemma will be used in order to obtain the swi-tched convergent state set.
Lemma 3. Given the switched system (1), if the set P is non-empty and the system is locally switched convergent under rotatingswitching laws, there exists x0 ∈ P such that
‖x0‖ ≤ ‖x‖ for all x ∈ P .
Proof. By hypothesis, there exists a ball B centered at the originsuch that for any initial condition inB the solution of (1) under theswitching law I converges to the origin. From this, it can be deducedthat inf‖x‖ : x ∈ P > 0. Therefore,we can denote by x0 the pointin C1 that satisfies that ‖x0‖ = inf‖x‖ : x ∈ P . Hence, we haveto prove that x0 ∈ P . Assume that this is not true.
Let us consider the solution of (1) under the switching law I thatstarts at x0 and denote by x1 the pointwhere the solution intersectsC1 for the first time. As x0 ∈ P , there are only two possibilities:‖x0‖ < ‖x1‖ or ‖x1‖ < ‖x0‖. Suppose that ‖x0‖ < ‖x1‖. Let x0 apoint in the curve C1 such that x0 ∈ B. Then, by hypothesis, thesolution of (1) under switching law I that starts at x0 converges tothe origin. Therefore, if x1 is the pointwhere this solution intersectsC1 for the first time, it holds that ‖x1‖ < ‖x0‖.
Hence, by Theorem 2 applied to x1 and x1, there exists y0 ∈ C1,with ‖x0‖ < ‖y0‖ < ‖x0‖, such that the solution that starts at thispoint is a closed curve, i.e., y0 ∈ P . But this is a contradiction since‖y0‖ < ‖x0‖ and ‖x0‖ = inf‖x‖ : x ∈ P .
Now, suppose that ‖x1‖ < ‖x0‖. We may choose x1 ∈ C1such that ‖x1‖ < ‖x1‖ < ‖x0‖ and consider the solution of (2)that starts at this point. Then, if x0 is the point where this solutionintersects C1 for the first time, it holds that ‖x0‖ < ‖x0‖ sincethis solution cannot intersect the solution of (1) that starts at x0.Therefore, ‖x1‖ < ‖x0‖ because ‖x1‖ < ‖x0‖ and we can deducethat the solution of (1) under switching law I that starts at x0converges to the origin.
As ‖x0‖ = inf‖x‖ : x ∈ P and ‖x0‖ < ‖x0‖, there mustexist y0 ∈ P such that ‖x0‖ < ‖y0‖ < ‖x0‖. Hence, the solutionthat starts at x0 intersects the closed curve solution that starts aty0. But this is not possible since in each region Si, for i = 1, 2, 3, 4,both solutions are determined by the same subsystems. Therefore,x0 must be in P .
Now, we can prove the main result in this section.
Theorem 3. Given the switched system (1), if the set P is non-empty,the system is locally switched convergent under rotating switchinglaws, and x0 ∈ P is such that ‖x0‖ = min‖x‖ : x ∈ P thenthe solution of (1) under switching law I that starts at x0 delimits theswitched convergent state set.
Proof. Firstly, we will prove that the region delimited by thissolution is contained in the switched convergent state set. Supposethat it is not true, i.e., there exists x
2 in this region such that thesolution of the switched system under switching law I that startsat x
2 does not converge to the origin.Without loss of generality, wecan suppose that x
2 ∈ C1.
If x2 is the point where the solution that starts at x
2 intersectsC1 for the first time then ‖x
2‖ < ‖x2‖ since the solution does notconverge to the origin.
Since the system is locally switched convergent, there exists x
1,‖x
1‖ < ‖x
2‖, (we can suppose, as before, that x
1 ∈ C1) such that thesolution converges to the origin. Therefore, if x1 is the point wherethe solution intersects the curve C1 for the first time, it holds that‖x1‖ < ‖x
1‖.Hence, by Theorem 2 applied to x1 and x2, there exists x0, with
‖x
1‖ < ‖x0‖ < ‖x
2‖, such that the solution that starts at this pointis a closed curve. However, ‖x
2‖ < ‖x0‖ implies ‖x0‖ < ‖x0‖,which contradicts the definition of x0.
Now, we have to prove that the switched convergent state setis contained in the region delimited by the periodic solution. Weproceed by contradiction. Assume that there exists a switchedconvergent state, x0, that is not in this region. Then, this solutionintersects the closed curve. Without loss of generality, supposethat the trajectory intersect the closed curve solution in S1 at astate x and the switched system is clockwise rotated. Then, theclosed curve solution is given by the trajectory of the subsystemf1. Thus, the trajectory starting at x0 cannot be given by thissubsystem. Hence, the trajectory is given by the subsystem f2 andgoes into the region limited by the arcs of the curves C1 and C2 andthe piece of the closed curve solution. Therefore, we can deducethat ⟨(f2(x))∗, f1(x)⟩ < 0. But this is a contradiction because⟨(f2(x))∗, f1(x)⟩ > 0 for all x ∈ S1.
Remark 3. It is important to note that the switched convergentstate set is completely determined. That is, although only therotating switching laws are considered, if x0 does not belong tothe switched convergent state, the solution of the switched systemstarting at x0 cannot converge to the origin under any switchinglaw, not only the switching laws that we have defined.
6. Limit cycle
The purpose of this section is to prove that if an initial conditionis in the switched convergent state set, the solution of (2) for thisinitial condition converges to the closed curve solution. Moreover,sufficient conditions for the existence of a limit cycle are obtained.
Theorem 4. Given the switched system (1), suppose that there existsthe switched convergent state set and it is delimited by a closedcurve solution of the system under switching law I. Then, for anyinitial condition in the switched convergent state set, the solutionof (2) converges to the closed curve solution.
Proof. Let x0 be in the switched convergent state set. It is clear thatthe solution of (1) converges to the origin, thus, the solution of itsinverse system goes outwards from the origin. Moreover, by usingthe same reasoning than in the previous theoremwe can prove thissolution cannot intersect the closed curve. Similarly, this solutioncannot converge to another closed curve since, in that case, therewould be a closed curve solution in the switched convergent stateset, which is a contradiction. Therefore, this solution converges tothe closed curve that delimits the switched convergent state set.Hence, we have proved the following theorem.
Now, this theorem will be used in order to obtain a conditionfor the existence of a limit cycle. Firstly, we define limit cycle forswitched systems.
Definition 7. Given a switched system x(t) = fσ(t)(x(t)) where σis the switching law, a closed curve solution, ∆, is a limit cycle ofthis system if it is satisfied that for each open setU1, where∆ ⊂ U1,

C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664 663
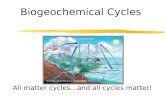
a b cu
Ω
Fig. 7. (a) Regions where the subsystems 1 and 2 are chosen according to switching law I. For this switching law, (b) the solutions that start at x1 and x2 , and, (c) the closedcurve solution and the solution that goes through x
1 .
there exists an open set U2, ∆ ⊂ U2 ⊂ U1 such that Γt(U2) ⊂ U1for all t > 0 and
limt→∞
d(Γt(x),∆) = 0
where Γ is the solution of the switched system under the switch-ing law σ .
Remark 4. This definition is based in the traditional concept oflimit cycle of a differential system (see for example [24]).
According to this definition, we prove the following result:
Theorem 5. Given the switched system (1), suppose that there existsthe switched convergent state set and is delimited by a closed curvesolution of the system under switching law I. If there exists a point x2outside the switched convergent state set such that the solution of theinverse switched system (2) that starts at x2 converges to the closedcurve solution, then this closed curve solution is a limit cycle of (2).
Proof. Without loss of generality, we can suppose that x2 ∈ C1and according to switching law I we start with the first subsystem.Furthermore, let x0 ∈ C1 be such that the solution that starts at x0is the closed curve solution and the arc [x0, x2] has an increasingparameterization.
Let U be a neighborhood of the origin that contains x2, wewill prove that every solution of the inverse system that starts inthis neighborhood converges (in the sense of Definition 7) to theclosed curve solution. Firstly, by the previous theorem, we knowthat every solution of the inverse switched system that starts inthe switched convergent state set converges to the closed curvesolution.
Now, suppose that the solution of the inverse switched systemstarts outside the switched convergent state set. Thus, let x1 ∈ Ube outside the switched convergent state set. We can suppose thatx1 is in the arc [x0, x2]. Thus, it is clear that ‖x0‖ < ‖x1‖. If weassume that the solution that starts at x1 of the inverse switchedsystem does not converge to the closed curve solution that startsat x0 then, since the solution of (2) that starts at x2 converges tothis closed curve solution, from Theorem 2 it can be deduced thatthere exists a closed curve solution between these solutions. Butthe solution of (2) that starts at x2 converges to the previous closedcurve solution. Thus, this solution must intersect the closed curvesolution obtained in this proof, which is a contradiction.
7. An illustrative example
Consider f1 and f2, two vector fields in the plane given by
f1(x1, x2) = (2x1 + 5x2 + x1(x21 + x22),−5x1 + 2x2 + x2(x21 + x22))
f2(x1, x2) = (4x1 + x2 + x21,−25x1 − 2x2 + x1x2).
Firstly, we observe that both subsystems have an unstable equilib-rium point at the origin. Thus, it makes sense to consider the prob-lem of studying the switched convergence of the switched systemgiven by these subsystems.
In order to check if this switched system is rotatedwe study thefollowing inner products:
⟨x∗, f1(x)⟩ = 5x21 + 5x22⟨x∗, f2(x)⟩ = 25x21 + 6x1x2 + x22.
Then, we see that (x, y) ∈ R2: ⟨x∗, fi(x)⟩ = 0 = 0, for i = 1, 2.
Thus, it is clear that both subsystems are of clockwise directionfor any x ∈ R2
\ 0 and the switched system consisting of thesesubsystems is clockwise rotated.
Now, it is also necessary to study the inner product given by
⟨(f2(x))∗, f1(x)⟩ = −30x21 + 50x31 − 25x41 − 132x1x2 − 6x31x2− 6x31x2 − 12x22 + 5x1x22 − 26x21x
22 − 6x1x32 − x42.
From this expression it can be deduced that the function given byF(x, y) = ⟨(f2(x))∗, f1(x)⟩ satisfies that det(HF (0)) < 0, whereHF (0) is the Hessian matrix of F at the origin. Therefore, if Ω =
(x, y) ∈ R2: F(x, y) = 0, there exists an open and connected set
U that contains the origin such thatΩ ∩ U is given by four curvesthat have increasing parameterizations and U \Ω is given by fourconnected components where it is satisfied that F(x, y) > 0 orF(x, y) < 0 (see Fig. 7 (a)).
For example, we can pick x1 = (−0.12, 1.09) and x2 =
(−1.11, 3.31) satisfying the conditions in Theorem 2 (see Fig. 7(b)), then there exists x0 such that the solution of (1) underswitching law I that starts at x0 is a closed curve (see Fig. 7 (b)).We find the value x0 = (−0.64, 3.35) and, thus, P is non-empty.
On the other hand, under switching law I, the solution of (1)that starts at x1 converges to the origin (see Fig. 7 (c)). Therefore,if we pick a ball B centered at the origin that does not contain x1,it can be deduced that the solution of (1) converges to the originfor any initial condition inB. Hence, the system is locally switchedconvergent. By applying Theorem 3, the solution of (1) that startsat x0, with ‖x0‖ = min‖x‖ : x ∈ P , delimits the switchedconvergent state set.
Let us prove that x0 = x0. We know that ‖x0‖ ≤ ‖x0‖.Furthermore, the solution of (1) under switching law I that startsat x
1 converges to the origin (see Fig. 7 (c)). Thus, ‖x
1‖ < ‖x0‖ ≤
‖x0‖. But the solution of (2) that starts at x
1 converges to the closedcurve solution that starts at x0 (see Fig. 7 (c)). Therefore, it must bex0 = x0.
Finally, Theorems 4 and 5 can be applied to x0 and x2 and weobtain that the closed curve solution that starts at x0 is limit cycleof (2).

664 C. Pérez, F. Benítez / Systems & Control Letters 60 (2011) 658–664
8. Conclusions
A new method for finding the switched convergent state setof a class of second-order switched nonlinear system has beenpresented in this paper. We have obtained regions where theswitched convergence of these switched systems is ensured.Moreover, these regions are defined by periodic solutions of theswitched systems. This has led to obtaining a result that assuresthe existence of a limit cycle.
As future work, new conditions that establish the existence oflimit cycles or closed curve solutions can be searched for in orderto avoid using the solution of subsystems to define the switchedconvergent state set. Moreover, the results could be extended to aswitched system consisting of three or more subsystems.
Acknowledgments
The authors would like to thank the Editor and the anonymousreviewers for their constructive and insightful comments forfurther improving the quality of this work.
References
[1] W.P. Dayawansa, C.F. Martin, A converse Lyapunov theorem of a class ofdynamical systemswhich undergo switching, IEEE Trans. Automat. Control 44(1999) 751–760.
[2] D. Liberzon, A.S. Morse, Basic problems in stability and design of switchedsystems, IEEE Control Syst. Mag. 19 (1999) 59–70.
[3] G. Xie, L. Wang, Controllability and stabilizability of switched linear systems,Syst. Control Lett. 48 (2003) 135–155.
[4] Z. Sun, S.S. Ge, T.H. Lee, Controllability and reachability criteria for switchedlinear systems, Automatica 38 (2002) 775–786.
[5] Z. Sun, D. Zhen, On reachability and stabilization of switched linear systems,IEEE Trans. Automat. Control 46 (2001) 291–295.
[6] S. Boyd, L.E. Ghaoui, E. Feron, V. Balakrishnan, Linear matrix inequalities insystem and control theory, SIAM Stud. Appl. Math. 15 (1994).
[7] D. Liberzon, J.P. Hespanha, A.S. Morse, Stability of switched linear systems: aLie-algebraic condition, Syst. Control Lett. 37 (1999) 117–122.
[8] P. Mason, U. Boscain, Y. Chitour, Common polynomial Lyapunov functions forlinear switched systems, SIAM J. Control Optim. 45 (2006) 226–245.
[9] K.S. Narendra, J. Balakrishnan, A common Lyapunov function for stable LTIsystems with commuting A-matrices, IEEE Trans. Automat. Control 39 (1994)2469–2471.
[10] R.N. Shorten, K.S. Narendra, A sufficient condition for the existence ofa common Lyapunov function for two second order linear systems, in:Proceedings of the 36th Conference on Decision and Control, San Diego, CA,1997, pp. 3521–3522.
[11] R.N. Shorten, K.S. Narendra, On the stability and existence of commonLyapunov functions for stable linear switching systems, in: Proceedings ofthe 37th IEEE Conference on Decision and Control, Tampa, FL, 1998, pp.3723–3724.
[12] E. Feron, Quadratic stabilizability of switched system via state and outputfeedback, MIT Technical Report CICS-P-468, 1996.
[13] M.A. Wicks, R.A. DeCarlo, Solution of coupled Lyapunov equations for thestabilization of multimodal linear systems, in: Proceedings of 1997 AmericanControl Conference, pp. 1709–1713.
[14] M.A. Wicks, P. Peleties, R.A. DeCarlo, Construction of piecewise Lyapunovfunctions for stabilizing switched systems, in: Proceedings of the 33rdConference on Decision and Control, Lake Buena Vista, FL, 1994, pp.3492–3497.
[15] X. Xu, P. Antsaklis, Stabilization of second-order LTI switched systems, Int. J.Control 73 (2000) 1261–1279.
[16] B. Hu, X. Xu, P.J. Antsaklis, A.N. Michel, Robust stabilizing control laws for aclass of second-order switched systems, Syst. Control Lett. 38 (1999) 197–207.
[17] R. Goebel, R.G. Sanfelice, A.R. Teel, Invariance principles for switching systemsvia hybrid systems techniques, Syst. Control Lett. 57 (2008) 980–986.
[18] R.G. Sanfelice, R. Goebel, A.R. Teel, Invariance principles for hybrid systemswith connections to detectability and asymptotic stability, IEEE Trans.Automat. Control 52 (2007) 2282–2297.
[19] Z. Sun, S.S. Ge, Switched Linear Systems: Control and Design, Springer-Verlag,2005.
[20] J. Milnor, Morse Theory, Princeton University Press, Princeton, 1973.[21] Z. Artstein, Examples of stabilizationwith hybrid feedback, Hybrid Systems III:
Verification and Control (1996) 173–185.[22] D. Liberzon, Stabilizing a linear system with finite-state hybrid output
feedback, in: Proceedings of the 7th IEEEMediterraneanConference onControland Automation, 1999, pp. 176–183.
[23] T.M. Apostol, Mathematical Analysis, second ed., Addison Wesley, 1974.[24] L. Perko, Differential equations and dynamical systems, second ed., Springer-
Verlag, New York, 1991.