Classification 2: discriminative models Jakob Verbeek January 14, 2011 SVM slides stolen from...
25
Classification 2: discriminative models Jakob Verbeek January 14, 2011 SVM slides stolen from Svetlana Lazebnik Course website: http://lear.inrialpes.fr/~verbeek/ MLCR.10.11.php
-
Upload
alvin-hodges -
Category
Documents
-
view
218 -
download
0
Transcript of Classification 2: discriminative models Jakob Verbeek January 14, 2011 SVM slides stolen from...

Classification 2: discriminative models
Jakob Verbeek
January 14, 2011
SVM slides stolen from Svetlana Lazebnik
Course website:
http://lear.inrialpes.fr/~verbeek/MLCR.10.11.php

Plan for the course• Session 4, December 17 2010
– Jakob Verbeek: The EM algorithm, and Fisher vector image representation
– Cordelia Schmid: Bag-of-features models for category-level classification
– Student presentation 2: Beyond bags of features: spatial pyramid matching for recognizing natural scene categories, Lazebnik, Schmid and Ponce, CVPR 2006.
• Session 5, January 7 2011– Jakob Verbeek: Classification 1: generative and non-parameteric methods
– Student presentation 4: Large-Scale Image Retrieval with Compressed Fisher Vectors, Perronnin, Liu, Sanchez and Poirier, CVPR 2010.
– Cordelia Schmid: Category level localization: Sliding window and shape model
– Student presentation 5: Object Detection with Discriminatively Trained Part Based Models, Felzenszwalb, Girshick, McAllester and Ramanan, PAMI 2010.
• Session 6, January 14 2011– Jakob Verbeek: Classification 2: discriminative models
– Student presentation 6:TagProp: Discriminative metric learning in nearest neighbor models for image auto-annotation, Guillaumin, Mensink, Verbeek and Schmid, ICCV 2009.
– Student presentation 7:IM2GPS: estimating geographic information from a single image, Hays and Efros, CVPR 2008.

Example of classification
Given: training images x and their categories y What are the categories of these test images?
apple
pear
tomato
cow
dog
horse

Generative vs Discriminative Classification• Training data consists of “inputs”, denoted x, and
corresponding output “class labels”, denoted as y.
• Goal is to predict class label y for a given test data x.
• Generative probabilistic methods– Model the density of inputs x from each class p(x|y)– Estimate class prior probability p(y)– Use Bayes’ rule to infer distribution over class given input
• Discriminative (probabilistic) methods– Directly estimate class probability given input: p(y|x)– Some methods do not have probabilistic interpretation, but
fit a function f(x), and assign to classes based on sign(f(x))
)(
)()|()|(
xp
ypyxpxyp
y
yxpypxp )|()()(

1. Choose class of decision functions in feature space.
2. Estimate the function parameters from the training set.
3. Classify a new pattern on the basis of this decision rule.
Discriminant function
kNN example from last weekNeeds to store all data
Separation using smooth curveOnly need to store curve parameters

Linear classifiers• Decision function is linear in the features:
• Classification based on the sign of f(x)
• Orientation is determined by w (surface normal)
• Offset from origin is determined by w0
• Decision surface is (d-1) dimensional hyper-plane orthogonal to w, given by
D
dii
T xwwwxwxf1
00)(
w
0)( 0 wxwxf T
f(x)=0

Linear classifiers• Decision function is linear in the features:
• Classification based on the sign of f(x)
• Orientation is determined by w (surface normal)
• Offset from origin is determined by w0
• Decision surface is (d-1) dimensional hyper-plane orthogonal to w, given by
• What happens in 3d with w=(1,0,0) and w0 =-1 ?
D
dii
T xwwwxwxf1
00)(
0)( 0 wxwxf T
w
f(x)=0

Dealing with more than two classes• First (bad) idea: construction from multiple binary classifiers
– Learn the 2-class “base” classifiers independently– One vs rest classifiers: train 1 vs (2 & 3), and 2 vs (1 & 3), and 3 vs (1 & 2)– One vs One classifiers: train 1 vs 2, and 2 vs 3 and 1 vs 3
• Not clear what should be done in some regions
– One vs Rest: Region claimed by several classes
– One vs One: no agreement

Dealing with more than two classes• Alternative: define a separate linear function for each class
• Assign sample to the class of the function with maximum value
• Decision regions are convex in this case– If two points fall in the region, then also all points on connecting line
• What shape do the separation surfaces have ?
0)( kTk wf k xwx
)(maxarg xkhy k

Logistic discriminant for two classes• Map linear score function to class probabilities with sigmoid
function
• The class boundary is obtained for
p(y|x)=1/2, thus by setting linear
function in exponent to zero
))(()|1(1|1
,exp1
1)(
)),((|1
,)( 0
xxx
xx
xwx
fypyp
zz
fyp
wf T
)(z
z
w
p(y|x)=1/2
f(x)=-5
f(x)=+5
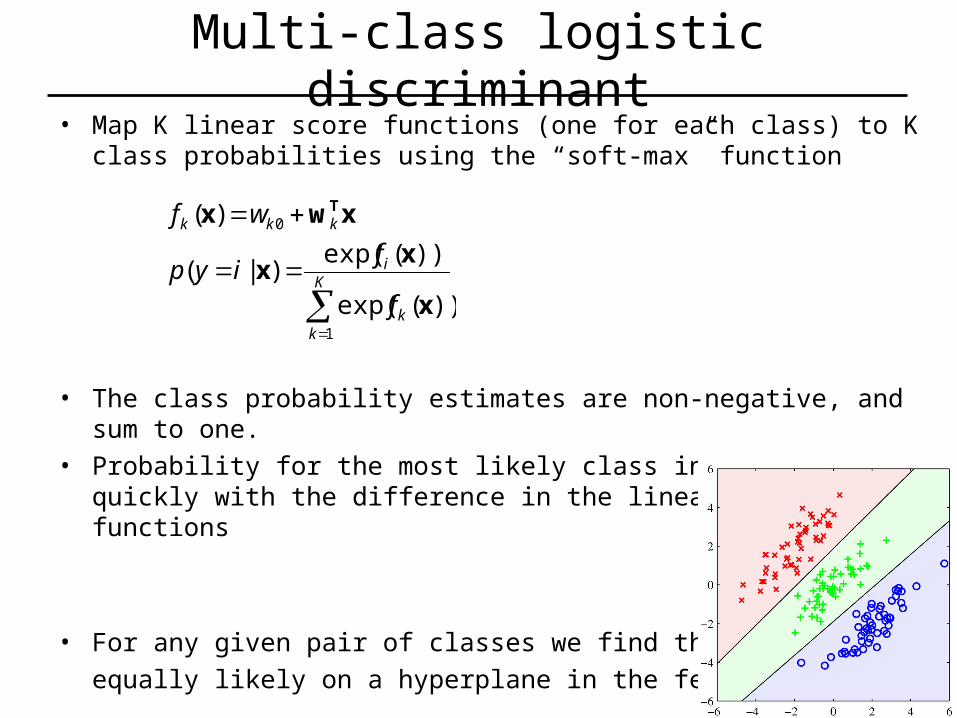
Multi-class logistic discriminant• Map K linear score functions (one for each class) to K class
probabilities using the “soft-max” function
• The class probability estimates are non-negative, and sum to one.• Probability for the most likely class increases quickly with the
difference in the linear score functions
• For any given pair of classes we find that they are
equally likely on a hyperplane in the feature space
K
kk
i
kkk
f
fiyp
wf
1
0
))(exp(
))(exp()|(
)(
x
xx
xwx T

Parameter estimation for logistic discriminant• Maximize the (log) likelihood of predicting the correct class label for
training data, ie the sum log-likelihood of all training data
• Derivative of log-likelihood as intuitive interpretation
• No closed-form solution, use gradient-descent methods – Note 1: log-likelihood is concave in parameters, hence no local optima– Note 2: w is linear combination of data points
Expected number of points from each class should equal the actual
number.
Expected value of each feature, weighting
points by p(y|x), should equal empirical
expectation.
n
nnc
cypcyw
L)|(][
0
x
n
nnnn
nnc
acypcyL
xxxw
)|(][
N
nnnypL
1
|log x
Indicator function1 if yn=c, else 0

Support Vector Machines• Find linear function (hyperplane) to separate
positive and negative examples
0:negative
0:positive
b
b
ii
ii
wxx
wxx
Which hyperplaneis best?

Support vector machines• Find hyperplane that maximizes the margin
between the positive and negative examples
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998

Support vector machines• Find hyperplane that maximizes the margin
between the positive and negative examples
1:1)(negative
1:1)( positive
by
by
iii
iii
wxx
wxx
MarginSupport vectors
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998
Distance between point and hyperplane: ||||
||
w
wx bi
For support vectors, 1 bi wx
Therefore, the margin is 2 / ||w||

Finding the maximum margin hyperplane
1. Maximize margin 2/||w||
2. Correctly classify all training data:
3. Quadratic optimization problem:
4. Minimize
Subject to yi(w·xi+b) ≥ 1
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998
wwT
2
1
1:1)(negative
1:1)( positive
by
by
iii
iii
wxx
wxx

Finding the maximum margin hyperplane• Solution:
i iii y xw
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998
Support vector
learnedweight

Finding the maximum margin hyperplane• Solution:
b = yi – w·xi for any support vector
• Classification function (decision boundary):
• Notice that it relies on an inner product between the test point x and the support vectors xi
• Solving the optimization problem also involves computing the inner products xi · xj between all pairs of training points
i iii y xw
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998
bybi
Tiii xxxw

Summary Linear discriminant analysis• Two most widely used linear classifiers in practice:
– Logistic discriminant (supports more than 2 classes directly)– Support vector machines (multi-class extensions recently developed)
• In both cases the weight vector w is a linear combination of the data points
• This means that we only need the inner-products between data points to calculate the linear functions
– The function k that computes the inner products is called a kernel function
w ix i
i
N
nnn
N
n
Tnn
T
kw
wwf
10
100
),(
)(
xx
xxxwx

• Datasets that are linearly separable work out great:
• But what if the dataset is just too hard?
• We can map it to a higher-dimensional space:
0 x
0 x
0 x
x2
Nonlinear SVMs
Slide credit: Andrew Moore

Φ: x → φ(x)
Nonlinear SVMs• General idea: the original input space can
always be mapped to some higher-dimensional feature space where the training set is separable:
Slide credit: Andrew Moore

Nonlinear SVMs• The kernel trick: instead of explicitly computing
the lifting transformation φ(x), define a kernel function K such that
K(xi , xj) = φ(xi ) · φ(xj)
• (to be valid, the kernel function must satisfy Mercer’s condition)
• This gives a nonlinear decision boundary in the original feature space:
bKyi
iii ),( xx
C. Burges, A Tutorial on Support Vector Machines for Pattern Recognition, Data Mining and Knowledge Discovery, 1998

Kernels for bags of features• Histogram intersection kernel:
• Generalized Gaussian kernel:
• D can be Euclidean distance, χ2 distance, Earth Mover’s Distance, etc.
N
i
ihihhhI1
2121 ))(),(min(),(
2
2121 ),(1
exp),( hhDA
hhK
J. Zhang, M. Marszalek, S. Lazebnik, and C. Schmid, Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study, IJCV 2007

Summary: SVMs for image classification1. Pick an image representation (in our case, bag of features)
2. Pick a kernel function for that representation
3. Compute the matrix of kernel values between every pair of training examples
4. Feed the kernel matrix into your favorite SVM solver to obtain support vectors and weights
5. At test time: compute kernel values for your test example and each support vector, and combine them with the learned weights to get the value of the decision function

SVMs vs Logisitic discriminants• Multi-class SVMs can be obtained in a similar way as for logistic
discriminants– Separate linear score function for each class
• Kernels can also be used for non-linear logisitic discriminants – Requires storing the support vectors, may cost lots of memory in practice– Computing kernel between new data point and support vectors may be
computationally expensive
• For Logisitic discriminant to work well in practice with small number of examples, regularizer needs to be added to achieve large margins
• Kernel functions can be applied to virtually any linear data processing technique
– Principle component analysis, k-means clustering, ….