Classical Dynamics - Solution Cap 06
16
CHAPTER 6 Some Methods in the Calculus of Variations 6-1. If we use the varied function ( ) ( ) , sin 1 y x x x α α π = + − (1) Then ( 1 cos 1 dy x dx απ π ) = − − (2) Thus, the total length of the path is ( ) ( ) 2 1 0 1 12 2 2 2 0 1 2 cos 1 cos 1 dy S dx dx x x απ π απ π = + − + − ∫ ∫ 2 = − (3) dx Setting ( ) 1 x u π − ≡ , the expression for S becomes 12 2 2 2 0 1 1 2 1 cos cos 2 π απ απ π = − + ∫ S u (4) u du The integral cannot be performed directly since it is, in fact, an elliptic integral. Because α is a small quantity, we can expand the integrand and obtain 2 2 2 2 2 2 2 0 2 1 1 1 1 1 cos cos cos cos 2 2 8 2 S u u u u π απ απ απ απ π = − − − − + ∫ … du (5) If we keep the terms up to co and perform the integration, we find 2 s u 2 2 2 2 16 S π α = + (6) which gives 165
description
Soluções para os problemas do livro Classical Dynamics.Mais em http://www.0e1.org
Transcript of Classical Dynamics - Solution Cap 06

CHAPTER 6 Some Methods in the
Calculus of Variations
6-1. If we use the varied function
( ) ( ), sin 1y x x xα α π= + − (1)
Then
(1 cos 1dy
xdx
απ π )= − − (2)
Thus, the total length of the path is
( ) ( )
21
0
11 22 2 2
0
1
2 cos 1 cos 1
dyS dx
dx
x xαπ π α π π
= +
− + −
∫
∫ 2= − (3) dx
Setting ( )1 x uπ − ≡ , the expression for S becomes
1 2
2 2 2
0
1 12 1 cos cos
2
π
απ α ππ
= − + ∫S u (4) u du
The integral cannot be performed directly since it is, in fact, an elliptic integral. Because α is a small quantity, we can expand the integrand and obtain
22 2 2 2 2 2
0
2 1 1 1 11 cos cos cos cos
2 2 8 2S u u u u
π
απ α π απ α ππ
= − − − − + ∫ … du
(5)
If we keep the terms up to co and perform the integration, we find 2s u
2 222
16S π α= + (6)
which gives
165

166 CHAPTER 6
228
Sπ α
α∂
=∂
(7)
Therefore
0
0a
Sα =
∂=
∂ (8)
and S is a minimum when α = 0.
6-2. The element of length on a plane is
2dS dx dy= + 2 (1)
from which the total length is
( )
( )2 2 2
1 1 1
, 22 2
,
1x y x
x y x
dyS dx dy
dx = + = + ∫ ∫ dx (2)
If S is to be minimum, f is identified as
2
1dy
fdx
= + (3)
Then, the Euler equation becomes
21d d
ydx dy
0+ =′ ′ (4)
where dy
ydx
=′ . (4) becomes
2
01
yddx y
′ = + ′
(5)
or,
21
y
y
′
+ ′ = constant ≡ C (6)
from which we have
2
21C
yC
=′−
= constant ≡ a (7)
Then,
y ax b= + (8)
This is the equation of a straight line.

SOME METHODS IN THE CALCULUS OF VARIATIONS 167
6-3. The element of distance in three-dimensional space is
2 2dS dx dy dz= + + 2 (1)
Suppose x, y, z depends on the parameter t and that the end points are expressed by
( ) ( ) ( )( )1 1 1 1 1 1, ,x t y t z t , ( ) ( ) ( )( )2 2 2 2 2 2, ,x t y t z t . Then the total distance is
2
1
22 2t
t
dydx dzS
dt dt dt = + + ∫ dt (2)
The function f is identified as
2 2 2f x y z= + + (3)
Since 0f f fx y z∂ ∂ ∂
= = =∂ ∂ ∂
, the Euler equations become
0
0
0
fddt x
fddt y
fddt z
∂= ∂
∂ =∂∂ =
∂
(4)
from which we have
12 2 2
22 2 2
32 2 2
constant
constant
constant
xC
x y z
yC
x y z
zC
x y z
= ≡+ += ≡+ += ≡+ +
(5)
From the combination of these equations, we have
1 2
2 3
yxC C
y zC C
= =
(6)
If we integrate (6) from t to the arbitrary t, we have 1

168 CHAPTER 6
11
1 2
1 1
2 3
y yx xC C
y y z zC C
−− = − − =
(7)
On the other hand, the integration of (6) from to gives 1t 2t
2 12 1
1 2
2 1 2 1
2 3
y yx xC C
y y z zC C
−− = − − =
(8)
from which we find the constants , C , and C . Substituting these constants into (7), we find 1C 2 3
11
2 1 2 1 2 1
y yx x z zx x y y z z
−− −= =
− − −1 (9)
This is the equation expressing a straight line in three-dimensional space passing through the two points ( )1 1 1, ,x y z , ( )2 2 2, ,x y z .
6-4.
x
y
z
1
2dS
φ
ρ
The element of distance along the surface is
2 2dS dx dy dz= + + 2 (1)
In cylindrical coordinates (x,y,z) are related to (ρ,φ,z) by
cos
sin
x
y
z z
ρ φ
ρ φ
= ==
(2)
from which
sin
cos
dx d
dy d
dz dz
ρ φ φ
ρ φ φ
= − ==
(3)

SOME METHODS IN THE CALCULUS OF VARIATIONS 169
Substituting (3) into (1) and integrating along the entire path, we find
2
1
22 2 2 2 2
1
S d dz zφ
φ
dρ φ ρ= + = +∫ ∫ φ (4)
where dz
zdφ
= . If S is to be minimum, 2 2f zρ≡ + must satisfy the Euler equation:
0f fz zφ∂ ∂∂
− =∂ ∂ ∂
(5)
Since 0fz∂
=∂
, the Euler equation becomes
2 2
0z
zφ ρ∂
=∂ +
(6)
from which
2 2
z
zρ += constant ≡ C (7)
or,
2
21C
zC
ρ=−
(8)
Since ρ is constant, (8) means
constantdzdφ
=
and for any point along the path, z and φ change at the same rate. The curve described by this condition is a helix.
6-5.
ds
(x1,y1)
(x2,y2)
y
x
z
The area of a strip of a surface of revolution is
22 2dA ds dx dyπ π= × = × + 2 (1)
Thus, the total area is

170 CHAPTER 6
2
1
22 1x
x
A x yπ= +∫ dx (2)
where dy
ydx
= . In order to make A a minimum, 21f x y≡ + must satisfy equation (6.39). Now
2
2
1
1
fy
x
f xyy y
∂= +
∂
∂=
∂ +
Substituting into equation (6.39) gives
( )( )
22 2
2 2
1 22 2
2
1 11 1
1 1
1
xyd dy x y
dx dxy y
y xy dy dx y
y
−
x + = + − = + +
+ − +=
+
Multiplying by 21 y+ and rearranging gives
( )21
dydxx y y
− =+
Integration gives
2
2
1ln ln ln
2 1y
x ay
− + =+
where ln a is a constant of integration. Rearranging gives
( )2
2 2
11
yx a
=−
Integrating gives
1coshx
y b aa
−= +
or
coshy b
x aa−
=
which is the equation of a catenary.

SOME METHODS IN THE CALCULUS OF VARIATIONS 171
6-6.
(x1,y1)
(x2,y2)2a
0
θ = 0
θ = π
x
y
If we use coordinates with the same orientation as in Example 6.2 and if we place the minimum point of the cycloid at (2a,0) the parametric equations are
( )
( )
1 cos
sin
x a
y a
θ
θ θ
= += +
(1)
Since the particle starts from rest at the point ( )1 1,x y , the velocity at any elevation x is [cf. Eq.
6.19]
( )12v g x x= − (2)
Then, the time required to reach the point ( )2 2,x y is [cf. Eq. 6.20]
( )2
1
1 22
1
12
x
x
yt
g x x
+ ′= − ∫ dx (3)
Using (1) and the derivatives obtained therefrom, (3) can be written as
1
2
1 2
10
1 coscos cos
at
g
θ
θ
θdθ
θ θ=
+= −
∫ (4)
Now, using the trigonometric identity, 2cos 2 cos 21 θ θ+ = , we have
1
1
2 2 10
2 210
cos2
cos cos2 2
cos2
sin sin2 2
dat
g
dag
θ
θ
θ θ
θθ
θ θ
θ θ
=−
=−
∫
∫ (5)
Making the change of variable, sin 2z θ= , the expression for t becomes
1sin2
2 210
2sin
2
a dzt
gz
θ
θ=
−∫ (6)
The integral is now in standard form:

172 CHAPTER 6
1
2 2sin
dx xaa x
− = =∫ (7)
Evaluating, we find
a
tg
π= (8)
Thus, the time of transit from ( )1 1,x y to the minimum point does not depend on the position of
the starting point.
6-7.
vcn1
1
=
vc
n22
=
n1
n2
θ1 θ1
θ2
(n2 > n1)
d
b
x
a
The time to travel the path shown is (cf. Example 6.2)
21 yds
tv v
+ ′= =∫ ∫ dx (1)
Although we have v = v(y), we only have 0dv dy ≠ when y = 0. The Euler equation tells us
2
01
yddx v y
′ = + ′
(2)
Now use v c n= and y′ = –tan θ to obtain
n sin θ = const. (3)
This proves the assertion. Alternatively, Fermat’s principle can be proven by the method introduced in the solution of Problem 6-8.
6-8. To find the extremum of the following integral (cf. Equation 6.1)
( ),J f y x dx= ∫
we know that we must have from Euler’s equation
0fy∂
=∂
This implies that we also have

SOME METHODS IN THE CALCULUS OF VARIATIONS 173
0fJ
dxy y
∂∂= =
∂ ∂∫
giving us a modified form of Euler’s equation. This may be extended to several variables and to include the imposition of auxiliary conditions similar to the derivation in Sections 6.5 and 6.6. The result is
( ) 0jj
ji i
gJx
y yλ
∂∂+ =
∂ ∂∑
when there are constraint equations of the form
( ), 0j ig y x =
a) The volume of a parallelepiped with sides of lengths , b , is given by 1a 1 1c
1 1 1V a b c= (1)
We wish to maximize such a volume under the condition that the parallelepiped is circumscribed by a sphere of radius R; that is,
(2) 2 2 21 1 1 4a b c R+ + = 2
We consider , , c as variables and V is the function that we want to maximize; (2) is the constraint condition:
1a 1b 1
{ }1 1 1, , 0g a b c = (3)
Then, the equations for the solution are
1 1
1 1
1 1
0
0
0
gVa a
gVb b
gVc c
λ
λ
λ
∂∂+ = ∂ ∂
∂∂ + = ∂ ∂
∂∂ + = ∂ ∂
(4)
from which we obtain
1 1 1
1 1 1
1 1 1
2 0
2 0
2 0
b c a
a c b
a b c
λ
λ
λ
+ = + =+ =
(5)
Together with (2), these equations yield
1 1 123
a b c R= = = (6)
Thus, the inscribed parallelepiped is a cube with side 23
R .

174 CHAPTER 6
b) In the same way, if the parallelepiped is now circumscribed by an ellipsoid with semiaxes a, b, c, the constraint condition is given by
2 2 21 1 1
2 2 2 14 4 4a b ca b z
= = = (7)
where , , c are the lengths of the sides of the parallelepiped. Combining (7) with (1) and (4) gives
1a 1b 1
2 21 12 2
a b ca b c
212= = (8)
Then,
1 1 12 2
, ,3 3
a a b b c c= = =23
(9)
6-9. The average value of the square of the gradient of ( )1 2 3, ,x x xφ within a certain volume V
is expressed as
( )21 2 3
22 2
1 21 2 3
1
1
I dx dx dxV
V x x x
φ
φ φ φ
= ∇
∂ ∂ ∂= + + ∂ ∂ ∂
∫∫∫
∫∫∫ 3dx dx dxv (1)
In order to make I a minimum,
22 2
1 2
fx x x3
φ φ φ ∂ ∂ ∂= + + ∂ ∂ ∂
must satisfy the Euler equation:
3
1
0i i
i
f fx
xφ φ=
∂ ∂∂ − = ∂ ∂ ∂ ∂ ∂
∑ (2)
If we substitute f into (2), we have
3
1
0i i ix x
φ
=
∂ ∂=
∂ ∂∑ (3)
which is just Laplace’sequation:
2 0φ∇ = (4)
Therefore, φ must satisfy Laplace’s equation in order that I have a minimum value.

SOME METHODS IN THE CALCULUS OF VARIATIONS 175
6-10. This problem lends itself to the method of solution suggested in the solution of Problem 6-8. The volume of a right cylinder is given by
(1) 2V Rπ= H
The total surface area A of the cylinder is given by
( )2bases side 2 2 2A A A R RH R Rπ π π= + = + H= + (2)
We wish A to be a minimum. (1) is the constraint condition, and the other equations are
0
0
gAR R
gAH H
λ
λ
∂∂ + = ∂ ∂ ∂∂ + =
∂ ∂
(3)
where . 2 0g V R Hπ= − =
The solution of these equations is
12
R H= (4)
6-11.
y
dsRθ
}12a
The constraint condition can be found from the relation ds = Rdθ (see the diagram), where ds is the differential arc length of the path:
( )1 22 2ds dx dy Rdθ= + = (1)
which, using , yields 2y ax=
2 21 4a x dx Rdθ+ = (2)
If we want the equation of constraint in other than a differential form, (2) can be integrated to yield
( )2 14 1 ln 2 4
2 4x
ax ax a xa
θ+ = + + + +2 2 1A R (3)
where A is a constant obtained from the initial conditions. The radius of curvature of a parabola, , is given at any point (x,y) by 2y ax= 0 1 2≥r . The condition for the disk to roll with one and
only one point of contact with the parabola is a
0R r< ; that is,

176 CHAPTER 6
12
Ra
< (4)
6-12. The path length is given by
2 21s ds y z d= = + +′ ′∫ ∫ x (1)
and our equation of constraint is
( ) 2 2 2 2, , 0g x y z x y z ρ= + + − = (2)
The Euler equations with undetermined multipliers (6.69) tell us that
2 2
21
y dgdy
dx dyy zλ λ
′ = = + +′ ′
(3)
with a similar equation for z. Eliminating the factor λ, we obtain
2 2 2 2
01 1
yd d zy dx z dxy z y z
′ ′ 1 1 − = + + + +′ ′ ′ ′
(4)
This simplifies to
( ) ( ) ( ) ( )2 2 2 21 1z y y z y y y z z y z y z z y y z z + + − + − + + − + =′′ ′ ′ ′ ′ ′′ ′ ′′ ′′ ′ ′ ′ ′ ′′ ′ ′′ 0 (5)
( ) ( ) 0yy zz z y yz yy zz y z− − + =′′ ′ ′ ′ ′′ ′′ ′ ′ ′ ′′zy + + (6)
and using the derivative of (2),
( ) ( )z xz y y xy z− = −′ ′′ ′ ′′ (7)
This looks to be in the simplest form we can make it, but is it a plane? Take the equation of a plane passing through the origin:
Ax By z+ = (8)
and make it a differential equation by taking derivatives (giving A + By′ = z′ and By″ = z″) and eliminating the constants. The substitution yields (7) exactly. This confirms that the path must be the intersection of the sphere with a plane passing through the origin, as required.
6-13. For the reason of convenience, without lost of generality, suppose that the closed curve passes through fixed points A(-a,0) and B(a,0) (which have been chosen to be on axis Ox). We denote the part of the closed curve above and below the Ox axis as and respectively. (note that and )
1( )y x 2( )y x
1 0y > 2 0y <
The enclosed area is
( )1 2 1 2 1 2 1 2( , ) ( ) ( ) ( ) ( ) ( , )a a a a
a a a a
J y y y x dx y x dx y x y x dx f y y dx− − − −
= − = − =∫ ∫ ∫ ∫

SOME METHODS IN THE CALCULUS OF VARIATIONS 177
The total length of closed curve is
( ) ( ) ( ) ( ) ( ){ } ( )2 2 2 21 2 1 2 1 1 1 2, 1 1 1 1 ,
a a a a
a a a a
K y y y dx y dx y y dx g y y dx− − − −
= + + + = + + + =′ ′ ′ ′ ′ ′ ′ ′∫ ∫ ∫ ∫
Then the generalized versions of Eq. (6.78) (see textbook) for this case are
1
21 1 1 1 1
0 11 ( )
f f g g yd d dy dx y y dx y dx y
λ λ ∂ ∂ ∂ ∂ ′ − + − = ⇒ − ∂ ∂ ∂ ∂′ ′ + ′
0= (1)
2
22 2 2 2 2
0 11 ( )
f f g g yd d dy dx y y dx y dx y
λ λ ∂ ∂ ∂ ∂ ′− + − = ⇒ − ∂ ∂ ∂ ∂′ ′ + ′
0 = (2)
Analogously to Eq. (6.85);
from (1) we obtain ( ) ( )2 2 21 1 2x A y A λ− + − = (3)
from (2) we obtain ( ) ( )2 2 21 2 2x B y B λ− + − = (4)
where constants A’s, B’s can be determined from 4 initial conditions
( )1, 0x a y= ± = and ( )2, 0x a y= ± =
We note that and , so actually (3) and (4) altogether describe a circular path of
radius 1 0y < 2 0y >
λ . And this is the sought configuration that renders maximum enclosed area for a given path length.
6-14. It is more convenient to work with cylindrical coordinates (r,φ ,z) in this problem. The constraint here is z = 1 – r , then dz = –dr
( )2 2 2 2 2 2 22s dr r d dz dr r d 2d φ β= + + = +
where we have introduced a new angular coordinate 2φ
β =
In this form of , we clearly see that the space is 2-dimensional Euclidean flat, so the shortest line connecting two given points is a straight line given by:
2ds
( )
0 0
00cos cos2
r rr
φ φβ β= =
−−
this line passes through the endpoints (r = 1, 2π
φ = ± ) , then we can determine unambiguously
the shortest path equation
cos
2 2( )cos
2
r
π
φφ
=
and z = 1 – r

178 CHAPTER 6
Accordingly, the shortest connecting length is
2 2
2
2
2 2 2 sin2 2
drr
d
π
π
l dπφ
φ−
= + = ∫
6-15.
21
2
0
[ ]dy
I y y dxdx
= − ∫
a) Treating I[y] as a mechanical action, we find the corresponding Euler-Lagrange equation
2
2( )d y
y xdx
= −
Combining with the boundary conditions (x = 0, y = 0) and (x = 1, y = 1), we can determine unambiguously the functional form of ( ) (sin ) (sin 1)y x x= .
b) The corresponding minimum value of the integral is
21 1
22
0 0
1[ ] cos2 cot (1) 0.642
sin 1dy
y dx dx xdx
= − = = = ∫ ∫I y
c) If x = y then I[y] = ( 2 3 ) = 0.667.
6-16.
a) S is arc length
2 22
2 2 2 91 1
4dy dydz
S dx dy dz dx dx x L ddx dx dx
= + + = + + = + + = ∫ ∫ ∫ x∫
Treating S and L like a mechanical action and Lagrangian respectively, we find the canonical momentum associated with coordinate y
291
4
dyL dxpdy dy
xdx dx
δ
δ
= = + +
Because L does not depend on y explicitly, then E-L equation implies that p is constant (i.e. 0dp dx = ), then the above equation becomes
3 2
2 2
91 9 94 1 11 1 4 4
xdy pp y dx x A x
dx p p
+ = + = + − − ∫ B+= ⇒
where A and B are constants. Using boundary conditions (x = 0, y = 0) and (x = 1, y = 1) one can determine the arc equation unambiguously

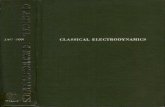
SOME METHODS IN THE CALCULUS OF VARIATIONS 179
3 2
3 2
8 9( ) 1 1
13 8 4xy x
= + − − and 3 2z x=
b)
z
x
y
0
0.250.5
0.751
00.25
0.50.75
10
0.25
0.5
0.75
1
0
0.250.5
0.1
0
6-17.
a) Equation of a ellipse
22
2 2 1yx
a b+ =
which implies
2ab
xy ≤ because 22
2 2
2xy yxab a b
≤ +
so the maximal area of the rectangle, whose corners lie on that ellipse, is
Max[A] = Max[4xy] = 2 iab.
This happens when
2
ax = and
2b
y =
b) The area of the ellipse is 0A abπ= ; so the fraction of rectangle area to ellipse area is then
0
[ ] 2Max AA π
=
6-18. One can see that the surface xy = z is “locally” symmetric with respect to the line x y= − = −z where x > 0, y < 0, z < 0. This line is a parabola. This implies that if the particle starts from point (1,-1,-1) (which belongs to the symmetry line) under gravity ideally will move downward along this line. Its velocity at altitude z (z < –1) can be found from the conservation of energy.
( ) 2 ( 1)v z g z= − +

180 CHAPTER 6